1 Respuesta Frecuencial - gecousb.com.vegecousb.com.ve/guias/GECO/Control de Procesos 2...
52
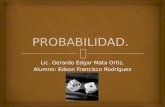
La respuesta frecuencial se define como la respuesta de un sistema, en estado estacionario, ante una entrada si- nusoidal. Los procesos estudiados en este capítulo son lineales, por lo que al ser sometidos a este tipo de entrada presentan también una salida sinusoidal pero con diferente amplitud y ángulo de fase, tal como se observa en la Fig. 1.1. Entre las ventajas que proporciona el análisis de un sistema a través de su respuesta en frecuencia se encuentran la facilidad de reproducir señales de prueba que permiten una identificación frecuencial, la exis- tencia de criterios de estabilidad a lazo cerrado, basados en la respuesta frecuencial del sistema a lazo abierto y finalmente la disposición de técnicas de diseño para el control de sistemas cuando las especificaciones de la respuesta son de carácter frecuencial. Además, cabe mencionar, que es posible establecer una relación entre la respuesta frecuencial y la temporal. -10 -8 -6 -4 -2 0 2 4 6 8 10 -3 -2 -1 0 1 2 3 Tiempo Salida r(t) = Rsen(wt) c(t) = Csen(wt + phi) Figura 1.1: Entrada y salida sinusoidal de un sistema Una vez alcanzado el estado estacionario se puede obtener la respuesta frecuencial en forma analítica haciendo uso de la función de transferencia del sistema G(s). Para ello se sustituye s = jω en dicha función de transfe- rencia tal como sigue, donde M corresponde con la relación de amplitudes de las sinusoides de salida y entrada, y φ viene a ser el ángulo de desfasaje. G ( jω )= Me jφ = |G ( jω )| e jφ φ = tg -1 Im (G ( jω )) Re (G ( jω )) Ahora, partiendo del hecho de que la función de transferencia de un sistema es una relación entrada-salida, se pueden expresar el módulo y el ángulo en función de la entrada R(s) y de la salida C(s), tal como lo expresan las Ecs. 1.1 y 1.2, respectivamente. De allí que, si se conoce G(s) es posible obtener, en forma analítica, la respuesta frecuencial del sistema evaluando el módulo y la fase para valores de frecuencia desde cero hasta infinito. 1
Transcript of 1 Respuesta Frecuencial - gecousb.com.vegecousb.com.ve/guias/GECO/Control de Procesos 2...

1 Respuesta Frecuencial
La respuesta frecuencial se define como la respuesta de un sistema, en estado estacionario, ante una entrada si-nusoidal. Los procesos estudiados en este capítulo son lineales, por lo que al ser sometidos a este tipo de entradapresentan también una salida sinusoidal pero con diferente amplitud y ángulo de fase, tal como se observa enla Fig. 1.1. Entre las ventajas que proporciona el análisis de un sistema a través de su respuesta en frecuenciase encuentran la facilidad de reproducir señales de prueba que permiten una identificación frecuencial, la exis-tencia de criterios de estabilidad a lazo cerrado, basados en la respuesta frecuencial del sistema a lazo abiertoy finalmente la disposición de técnicas de diseño para el control de sistemas cuando las especificaciones de larespuesta son de carácter frecuencial. Además, cabe mencionar, que es posible establecer una relación entre larespuesta frecuencial y la temporal.
−10 −8 −6 −4 −2 0 2 4 6 8 10−3
−2
−1
0
1
2
3
Tiempo
Sal
ida
r(t) = Rsen(wt) c(t) = Csen(wt + phi)
Figura 1.1: Entrada y salida sinusoidal de un sistema
Una vez alcanzado el estado estacionario se puede obtener la respuesta frecuencial en forma analítica haciendouso de la función de transferencia del sistema G(s). Para ello se sustituye s = jω en dicha función de transfe-rencia tal como sigue, donde M corresponde con la relación de amplitudes de las sinusoides de salida y entrada,y φ viene a ser el ángulo de desfasaje.
G( jω) = Me jφ = |G( jω)|e jφ
φ = tg−1[
Im(G( jω))
Re(G( jω))
]Ahora, partiendo del hecho de que la función de transferencia de un sistema es una relación entrada-salida, sepueden expresar el módulo y el ángulo en función de la entrada R(s) y de la salida C(s), tal como lo expresanlas Ecs. 1.1 y 1.2, respectivamente. De allí que, si se conoce G(s) es posible obtener, en forma analítica, larespuesta frecuencial del sistema evaluando el módulo y la fase para valores de frecuencia desde cero hastainfinito.
1

1 Respuesta Frecuencial
|G( jω)|= |C ( jω)||R( jω)|
(1.1)
∠G( jω) = ∠
(C ( jω)
R( jω)
)= ∑(∠ceros)−∑(∠polos) (1.2)
1.1. Obtención de la respuesta frecuencial a partir de la función de
transferencia
Una función de transferencia puede ser expresada como una relación de ceros y polos que, en forma general,puede ser escrita tal y como se muestra en la Ec. 1.3, donde K corresponde con la ganancia del sistema, z conlos ceros, p con los polos, m con el número de ceros y n con el número de polos. A partir de allí, el módulo dela respuesta y su fase, para un valor específico de ω , se calcularán según las Ecs. 1.4 y 1.5, respectivamente.
G( jω) =
Km∏i=1
( jω + zi)
n∏j=1
( jω + p j)(1.3)
|G( jω)|=K
m∏i=1| jω + zi|
n∏j=1
∣∣ jω + p j∣∣ (1.4)
∠G( jω) =m
∑i=1
∠( jω + zi)−n
∑j=1
∠( jω + p j) (1.5)
Considerando una función de transferencia específica como la expresada por la Ec. 1.6, es posible conocer surespuesta frecuencial tal como se muestra a continuación, donde el módulo y la fase deberán evaluarse para ω
desde cero hasta infinito.
G(s) =K (s+ z)s(s+ p)
(1.6)
G( jω) =K ( jω + z)jω ( jω + p)
|G( jω)|= K | jω + z|| jω| | jω + p|
∠G( jω) = ∠( jω + z)− (∠ jω +∠( jω + p))
La representación de la respuesta frecuencial puede hacerse de diferentes formas, entre las cuales se puedennombrar los Diagramas de Bode y los Diagramas Polares, los cuales serán estudiados a continuación.
2

1.2 Diagramas de Bode
1.2. Diagramas de Bode
Los diagramas de Bode se utilizan para representar la respuesta frecuencial de un sistema haciendo uso dedos gráficos, el primero representa el logaritmo del módulo versus la frecuencia y el segundo representa elángulo de fase versus la frecuencia. La magnitud logarítmica de G( jω) se representa como una amplitudlogarítmica y se calcula como el 20log|G( jω)|, siendo la unidad de dicha amplitud los decibeles (dB). Laprincipal ventaja de realizar un diagrama logarítmico es que el carácter multiplicativo de los módulos en lafunción de transferencia se convierte en aditivo, lo cual simplifica la representación en cuestión. Para un sistemacuya función de transferencia sea la expresada por la Ec. 1.7, se calculará su amplitud logarítmica y su fase talcomo lo expresan las Ecs.1.8 y 1.9, en las que se puede observar el carácter aditivo de ambas.
G(s) =K (s+ z1)(s+ z2)
s(s+ p1)(s+ p2)(1.7)
G( jω) =K ( jω + z1)( jω + z2)
jω ( jω + p1)( jω + p2)
|G( jω)|= K | jω + z1| | jω + z2|| jω| | jω + p1| | jω + p2|
20log |G( jω)| = 20logK +20log | jω + z1|+20log | jω + z2|− · · ·· · · (20log | jω|+20log | jω + p1|+20log | jω + p2|)
(1.8)
∠G( jω) = (∠( jω + z1)+∠( jω + z2))− (∠ jω +∠( jω + p1)+∠( jω + p2)) (1.9)
Partiendo del hecho de que, tanto la amplitud logarítmica como la fase, pueden ser representadas como lasuma de las contribuciones de cada uno de sus factores, es posible obtener el diagrama de Bode de un sistemacualquiera si se conocen los diagramas de Bode para los diferentes factores que la conformen. Es decir, conoci-dos los diagramas de Bode para los distintos factores que pueden componer una función de transferencia, seráposible obtener el diagrama de Bode de una función compuesta por dichos factores de una forma muy sencilla.Para ello se desarrollará la representación de los diagramas de Bode para los diferentes factores que conformanuna función de transferencia, los cuales son los siguientes:
• Ganancia G( jω) = K
• Polo y cero en el origen G( jω) = ( jω)±1
• Polos y ceros en el eje real G( jω) = (1+ τ jω)±1
• Polos y ceros conjugados G( jω) =[1+2ζ ( jω/ωn)+( jω/ωn)
2]
A continuación se desarrollarán los diagramas de Bode de cada uno de dichos factores, para lo cual se partiráde la función de transferencia de cada uno y se seguirá el mismo procedimiento descrito con anterioridad paraobtener la amplitud logarítmica y la fase.
1.2.1. Ganancia
La obtención del diagrama de Bode para el factor ganancia se realiza sustituyendo s = jω en la función detransferencia, de forma tal que a partir de allí se pueda obtener la amplitud logarítmica y la fase para los valoresde frecuencia requeridos, tal como se muestra a continuación.
G(s) = K ⇒ G( jω) = K
3

1 Respuesta Frecuencial
|G( jω)|= K ⇒ 20log |G( jω)|= 20log(K)
∠G( jω) = φ = tg−1(
ImRe
)= 00
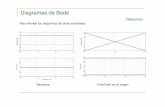
En la Fig. 1.2 (a) se observa el vector que representa G( jω) en el plano s, en el cual se aprecia que dicho vectorsiempre tendrá una fase igual 0o y un módulo igual a K independiente del valor de la frecuencia. Adicional-mente, en la Fig 1.2 (b) se aprecia el diagrama de Bode para los casos en que sea K > 1 y K < 1, del cual destacael hecho de que agregar un factor ganancia tendrá como resultado una subida o bajada del diagrama de amplituddependiendo del valor de la ganancia, sin que ello modifique la fase.
(a) Representación en elplano s
10−1
100
101
102
−30
−20
−10
0
10
20
30
Mag
nitu
d (d
B)
10−1
100
101
102
−1
−0.5
0
0.5
1
Fase
(de
g)
Frecuencia (r/s)
K = 10
K = 0,1
K = 10 K = 0,1
(b) Diagrama de Bode
Figure 1.2: Ganancia G(s) = K
1.2.2. Polo y cero en el origen
Al igual que en el caso anterior, la obtención del diagrama de Bode para un polo en el origen se realiza susti-tuyendo s = jω en la función de transferencia, de forma tal que se pueda obtener la amplitud logarítmica y lafase para los valores de frecuencia requeridos, tal como se muestra a continuación.
G(s) =1s⇒ G( jω) =
1jω⇒ G( jω) =
1jω
((− jω)
(− jω)
)=−
(1ω
)j
|G( jω)|= 1ω⇒ 20log |G( jω)|= 20log(1)−20log(ω) =−20log(ω) (1.10)
∠G( jω) = φ = tg−1(
ImRe
)⇒ φ = tg−1
(1/ω
0
)⇒ φ =−900
4

1.2 Diagramas de Bode
A partir de allí se puede concluir que el vector que representará la respuesta frecuencial para variaciones deω de cero a infinito, mostrado en la Fig 1.3, tendrá siempre una fase igual a −900, en tanto que su módulovariará desde infinito a cero. En dicha figura es posible observar el siguiente comportamiento para la fase, elcual confirma lo concluido respecto a la misma.
ω → 0 Re = 0 Im→ ∞− φ =−900
ω → ∞ Re = 0 Im→ 0− φ =−900
Figure 1.3: Polo en el origen
En cuanto a la amplitud logarítmica, descrita según la Ec. 1.10, se concluye que la representación de la mismaen escala semilogarítmica será una recta, cuya pendiente puede conocerse evaluando la función para dos valoresde frecuencia, como por ejemplo ω1 y ω2 cuya diferencia es una década. En la Ec. 1.11 se demuestra que en unadécada la recta a caido 20 dB, por lo que se concluye que la gráfica de la amplitud logarítmica corresponderácon una recta cuya pendiente será de −20 dB/dc. Dicha recta cortará el eje de frecuencias cuando ω sea igual auno, pues para dicho valor la amplitud logarítmica será cero. En la Fig. 1.4 se puede observar el diagrama deBode para un polo en el origen, en la cual también se incluye el diagrama para un cero en el origen, para el cualla amplitud logarítmica será una recta de pendiente 20 dB/dc y la fase será de 900 para toda la frecuencia.
20log |G( jω1)|−20log |G( jω2)|= 20log(
ω1
ω2
)= 20log
(ω1
10ω1
)=−20log(10) =−20 dB (1.11)
Cabe destacar que si se tienen polos múltiples, G(s) = (s)±n, la ganancia logarítmica y la fase quedarán expre-sadas según las Ecs. 1.12 y 1.13, respectivamente. De allí que se tendrá una gráfica de ganancia logarítmicacuya pendiente será ±n(20 dB/dc) y una gráfica de fase cuyo valor será (±n90o).
20log∣∣( jω)±n∣∣=±20nlog(ω) (1.12)
φ =±n(900) (1.13)
5

1 Respuesta Frecuencial
10−1
100
101
−20
−10
0
10
20
Mag
nitu
d (d
B)
10−1
100
101
102
−100
−50
0
50
100
Fas
e (d
eg)
Polo Cero
Cero
Polo
Figure 1.4: Diagrama de Bode. Polo y cero en el origen G( jω) = ( jω)±1
1.2.3. Polo y cero en el eje real
La obtención del diagrama de Bode para un polo en el eje real se realiza en forma semejante a los anteriores, deforma tal que el módulo y la fase quedarán expresados según las Ecs. 1.14 y 1.15.
G(s) =1
τs+1
G( jω) =1
(τ jω +1)(−τ jω +1)(−τ jω +1)
=1− τω j
1+(τω)2
G( jω) =
(1
1+(τω)2
)−
(τω
1+(τω)2
)j
|G( jω)|=
√√√√√ 1+(−τω)2(1+(τω)2
)2 =1√
1+(τω)2⇒ 20log |G( jω)|= 20log(1)−10log
(1+(τω)2
)(1.14)
∠G( jω) = φ = tg−1(
ImRe
)⇒ φ = tg−1 (−τω) (1.15)
Para este caso se utilizarán aproximaciones para graficar el diagrama de Bode, tanto para la amplitud logarítmicacomo para la fase, las cuales se conocerán en adelante como aproximaciones asintóticas. Para ello se evaluaránlas Ecs. 1.14 y 1.15 en los valores que se muestran a continuación.
ω � 1/τ 20log |G( jω)|=−20log(1) = 0 dB Re→ 1+ Im→ 0− φ → 00
ω = 1/τ 20log |G( jω)|=−20log√
2 =−3 dB Re =+12 Im =−1
2 φ =−450
ω � 1/τ 20log |G( jω)|=−20log(τω) Re→ 0+ Im→ 0− φ →−900
6

1.2 Diagramas de Bode
Como se puede observar, la amplitud logarítmica tiende a 0 dB cuando la frecuencia es mucho menor que 1/τ
y cuando la frecuencia es mucho mayor que 1/τ tiende a una recta de pendiente −20 dB/dc, siendo 1/τ el puntodonde se cortan ambas asíntotas conocido como frecuencia de corte o de transición de ganancias. En cuantoa la fase, también se observan tendencias en los extremos de frecuencia en los cuales la misma no presentarácambios. En la Fig. 1.5(a) se muestra tanto el diagrama de Bode exacto para un polo en el eje real, como suaproximación asintótica y en la Fig. 1.5(b) se muestra el caso del cero en el eje real.
10−2
10−1
100
101
102
−40
−30
−20
−10
0
10
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
−80
−60
−40
−20
0
Fase
(de
g)
Frecuencia (r/s)
Aproximación Asintótica
Curva Real
−20 dB/dc
3 dB
(a) Polo
10−2
10−1
100
101
102
−10
0
10
20
30
40
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
0
20
40
60
80
Fase
(de
g)Frecuencia (r/s)
Aproximación Asintótica
3 dB
Curva Real
20 dB/dc
(b) Cero
Figure 1.5: Diagrama de Bode. Polo y cero en el eje real G( jω) = (1+ τ jω)±1
1.2.4. Polos y ceros conjugados
La obtención del diagrama de Bode para un par de polos conjugados se realiza en forma semejante a los an-teriores, de forma tal que la amplitud logarítmica y la fase quedarán expresadas por las Ecs. 1.16 y 1.17,respectivamente.
G(s) =(
s2
ω2n+
2ζ sωn
+1)−1
G( jω) =
1[1−(
ω
ωn
)2]+2ζ
ω
ωnj
[
1−(
ω
ωn
)2]−2ζ
ω
ωnj[
1−(
ω
ωn
)2]−2ζ
ω
ωnj
G( jω) =
[1−(
ω
ωn
)2]−2ζ
ω
ωnj[
1−(
ω
ωn
)2]2
+[2ζ
ω
ωn
]2
7

1 Respuesta Frecuencial
|G( jω)|=
√√√√√√√√√[
1−(
ω
ωn
)2]2
+[2ζ
ω
ωn
]2
[[1−(
ω
ωn
)2]2
+[2ζ
ω
ωn
]2]2 =
[1−(
ω
ωn
)2]2
+
[2ζ
ω
ωn
]2− 1
2
20log |G( jω)|=−10log
[1−(
ω
ωn
)2]2
+
[2ζ
ω
ωn
]2 (1.16)
∠G( jω) = φ = tg−1(
ImRe
)⇒ φ = tg−1
− 2ζω
ωn
1−(
ω
ωn
)2
(1.17)
También se utilizarán aproximaciones para graficar el diagrama de Bode, tanto para la amplitud logarítmicacomo para la fase, para ello se evaluarán las Ecs. 1.16 y 1.17 en los valores que se muestran a continuación.
ω � ωn 20log |G( jω)|=−20log(1) = 0 dB Re→ 1+ Im→ 0− φ → 00
ω = ωn 20log |G( jω)|=−20log2ζ Re = 0+ Im =− 12ζ
φ =−900
ω � ωn 20log |G( jω)|=−40log(
ω
ωn
)Re→−
(ωnω
)2→ 0−(más rápido) Im→−(
ωnω
)→ 0− φ →−1800
Como se puede observar, la amplitud logarítmica tiende a 0 dB cuando la frecuencia es mucho menor que ωn
y cuando la frecuencia es mucho mayor que ωn tiende a una recta de pendiente −40 dB/dc, siendo ωn el puntodonde se cortan ambas asíntotas conocido como frecuencia de corte o de transición de ganancias. En cuantoa la fase, también se observan tendencias en los extremos de frecuencia en los cuales la misma no presentarácambios. En la Fig. 1.5(a) se muestra tanto el diagrama de Bode exacto para un par de polos conjugados, comosu aproximación asintótica. No se incluye el diagrama de los ceros conjugados porque complicaría enormementeel diagrama, pero al igual que en los casos anteriores, el diagrama de los ceros sería simétrico al de los polosrespecto al eje de la frecuencia.
10−1
100
101
102
−60
−40
−20
0
20
Mag
nitu
d (d
B)
10−1
100
101
102
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Aproximación Asintótica
Curvas Reales
− 40 dB/dc
Figure 1.6: Diagrama de Bode. Polos conjugados G( jω) =[1+2ζ ( jω/ωn)+( jω/ωn)
2]−1
8

1.2 Diagramas de Bode
El pico que se observa en el diagrama de Bode anterior se conoce como pico de resonancia (Mr) y ocurre a unafrecuencia conocida como frecuencia de resonancia (ωr), ambos valores pueden ser calculados utilizando lasEcs. 1.18 y 1.19, respectivamente.
Mr = |G( jωr)|=1
2ζ√
1−ζ 2(1.18)
ωr = ωn√
1−2ζ 2 (1.19)
Una vez conocidos los diagramas de Bode para cada uno de los factores, se puede obtener el diagrama de bodepara un sistema conformado por varios factores, para lo cual se debe seguir el procedimiento que se muestra acontinuación.• Rescribir la función de transferencia como un producto de los factores básicos analizados anteriormente.• Identificar las frecuencias de ocurrencia o corte de cada uno de los factores.• Identificar los factores que tienen influencia a baja frecuencia y a alta frecuencia.• Dibujar las aproximaciones asintóticas de la amplitud logarítmica comenzando a baja frecuencia y añadi-
endo el efecto de cada factor al ir llegando a su frecuencia de ocurrencia.• Corregir las aproximaciones asintóticas.• Dibujar las tendencias de la fase, tanto a baja frecuencia como a alta frecuencia. Entre dichos extremos
aproximar la forma de la curva de fase según la ocurrencia de los diferentes factores.
Ejemplo 1.1 Realizar el diagrama de Bode de un sistema cuya función de transferencia es la expresada por laEc. 1.20.
G(s) =100(s+10)
(s+1)(s+100)(1.20)
SoluciónLo primero que debe hacerse es reordenar la función de transferencia para identificar aisladamente cada unode los factores que la conforman, lo cual queda descrito por la Ec. 1.21. A partir de allí se enumeran losdistintos factores, sus características y frecuencias de ocurrencia.
G(s) =100
( s+1010
)10
(s+1)( s+100
100
)100
=10( 1
10 s+1)
(s+1)( 1
100 s+1) (1.21)
• Ganancia K = 10• Polo en el eje real (s+1)−1 ⇒ ω1 = 1• Cero en el eje real
( 110 s+1
)⇒ ω2 = 10
• Polo en el eje real( 1
100 s+1)−1 ⇒ ω3 = 100
Se realizará en diagrama analizando la influencia de cada unos de los factores a frecuencias bajas, altas eintermedias.
Frecuencias bajas• Solamente la ganancia contribuye con 20log(10) = 20dB, por lo que la gráfica comenzará en dicho valor
con una recta de pendiente 0 dB.
Frecuencias altas
9

1 Respuesta Frecuencial
• La amplitud logarítmica será una recta cuya pendiente tenderá a −20 dB/dc, debido a que el cero contri-buye con una pendiente 20 dB/dc y los dos polos contribuyen con 2x(−20 dB/dc).
• En cuánto a la fase se presentará una situación semejante, el cero contribuye con 900 y los dos polos con2x(−900
), por lo que la fase tenderá a −900.
Frecuencias Intermedias• La pendiente de la amplitud logarítmica que comienza en 0 dB/dc, pasará a −20 dB/dc cuando aparece el
primer polo en ω1, luego en ω2 volverá a 0 dB/dc debido a la ocurrencia del cero, para finalmente cambiara −20 dB/dc en ω3 al ocurrir el otro polo.
• La fase se comportará en forma semejante, comenzará en 00 y decrecerá tendiendo a -900 debido a laaparición del polo, luego crecerá debido al cero, para finalmente volver a decrecer tendiendo a −900.
Finalmente, en la Fig. 1.7 se muestra el diagrama de Bode solicitado, en el cual se muestran las curvas realesy la aproximación asintótica.
10−1
100
101
102
103
104
−40
−30
−20
−10
0
10
20
30
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−90
−75
−60
−45
−30
−15
0
Fase
(de
g)
Frecuencia (r/s)
− 20 dB/dc
− 20 dB/dc w1 w2 w3
Termina en −90
Decreciente
Creciente
Decreciente
Comienza en 0
Figure 1.7: Diagrama de Bode. G(s) = 100(s+10)(s+1)(s+100)
Ejemplo 1.2 Realizar el diagrama de Bode de un sistema cuya función de transferencia es la expresada por laEc.1.22.
G(s) =5000(s+10)
s(s+50)(s+100)(1.22)
10

1.2 Diagramas de Bode
Solución
Lo primero que debe hacerse es reordenar la función de transferencia para identificar aisladamente cada unode los factores que la conforman, lo cual queda descrito por la Ec. 1.23. a partir de allí se enumeran losdistintos factores, sus características y frecuencias de ocurrencia.
G(s) =5000
( s+1010
)10
s( s+50
50
)50( s+100
100
)100
=10( 1
10 s+1)
s( 1
50 s+1)( 1
100 s+1) (1.23)
• Ganancia K = 10
• Polo en el origen
• Cero en el eje real( 1
10 s+1)⇒ ω1 = 10
• Polo en el eje real( 1
50 s+1)−1 ⇒ ω2 = 50
• Polo en el eje real( 1
100 s+1)−1 ⇒ ω3 = 100
En forma similar al ejercicio anterior, se realizará el diagrama analizando las contribuciones de los distintosfactores a frecuencias bajas, altas e intermedias.
Frecuencias bajas
• La ganancia contribuye con 20log(10) = 20dB.
• El polo en el origen contribuye con una pendiente de −20 dB/dc
• Por ello la gráfica deberá comenzar en ω = 0,1 con una recta de pendiente −20 dB/dc que arranca en40 dB, 20dB debidos a la ganancia y 20dB debidos a la contibución del polo en el origen.
Frecuencia altas
• La pendiente tiende a −40 dB/dc pues se tienen 2 polos más que ceros.
• La fase tiende a −1800 por la misma razón anterior.
Frecuencias intermedias
• La pendiente de la amplitud logarítmica que comienza en −20 dB/dc, pasará a 0 dB/dc cuando apareceel primer cero en ω1, luego en ω2 volverá a −20 dB/dc debido a la ocurrencia del polo, para finalmentedecaer a −40 dB/dc en ω3 al ocurrir el otro polo.
• La fase se comportará en forma semejante, comenzará en −900 y aumentará debido a la aparición delcero y luego decrecerá monótonamente debido a los dos polos tendiendo a −1800.
Finalmente, en la Fig. 1.8 se muestra el diagrama de Bode solicitado, en el cual se muestran las curvas realesy la aproximación asintótica.
11

1 Respuesta Frecuencial
10−1
100
101
102
103
104
−80
−60
−40
−20
0
20
40
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−180
−160
−140
−120
−100
−80
−60
−40
Fase
(de
g)
Frecuencia (r/s)
− 20 dB/dc
− 20 dB/dc
− 40 dB/dc
Fase aumenta
Fase disminuye
Fase comienza en −90
w1 w2 w3
Fase termina en −180
Figure 1.8: Diagrama de Bode G(s) = 5000(s+10)s(s+50)(s+100)
Ejemplo 1.3 Realizar el diagrama de Bode de un sistema cuya función de transferencia es la expresada por laEc.1.24.
G(s) =40(s+10)2
s(s+1)(s+100)(1.24)
SoluciónLo primero que debe hacerse es reordenar la función de transferencia para identificar aisladamente cada unode los factores que la conforman, lo cual queda descrito por la Ec. 1.25. a partir de allí se enumeran losdistintos factores, sus características y frecuencias de ocurrencia.
G(s) =40(s+10)2
s(s+1)(s+100)=
40( 1
10 s+1)2
s(s+1)( 1
100 s+1) (1.25)
• Ganancia K = 40• Polo en el origen• Polo en el eje real (s+1) ⇒ ω1 = 1
• Dos ceros en el eje real( 1
10 s+1)2 ⇒ ω2 = 10
• Polo en el eje real( 1
100 s+1)−1 ⇒ ω3 = 100
En forma similar al ejercicio anterior, se realizará el diagrama analizando las contribuciones de los distintosfactores a frecuencias bajas, altas e intermedias.Frecuencias bajas
12

1.3 Identificación de un proceso a partir de su diagrama de Bode
• La ganancia contribuye con 20log(40) = 32dB.• El polo en el origen contribuye con una pendiente de −20 dB/dc en el diagrama de amplitud y con −900
en el diagrama de fase.• La gráfica comienza entonces con una recta de pendiente −20 dB/dc que arranca en ω = 0,1 con una
amplitud de 52 dB, 32dB debidos a la ganancia y 20dB debidos al polo en el origen.Frecuencia altas• La pendiente tiende a −20 dB/dc pues se tiene un polo más que ceros.• La fase tiende a −900 por la misma razón anterior.
Frecuencias intermedias• La pendiente de la amplitud logarítmica que comienza en −20 dB/dc, pasará a −40 dB/dc cuando aparece
el polo en ω1, luego en ω2 pasa a 0 dB/dc debido a la ocurrencia de los ceros, para finalmente decaer a−20 dB/dc en ω3 al ocurrir el otro polo.
• La fase se comportará en forma semejante, comenzará en −900 y disminuirá debido a la aparición delpolo, luego aumentará debido a la aparición del cero doble para luego decrecer debido al último polotendiendo a −900.
Finalmente, en la Fig. 1.9 se muestra el diagrama de Bode solicitado, en el cual se muestran las curvas realesy la aproximación asintótica.
10−1
100
101
102
103
104
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−140
−120
−100
−80
−60
−40
Fase
(de
g)
Frecuencia (r/s)
Fase comienza en −90 Fase termina en −90
− 20 dB/dc
− 20 dB/dc
− 40 dB/dc
w1
w2 w3
Fase aumenta Fase disminuye
Fase disminuye
Figure 1.9: Diagrama de Bode G(s) = 40(s+10)2
s(s+1)(s+100)
1.3. Identi�cación de un proceso a partir de su diagrama de Bode
En capítulos anteriores se estudió la identificación de un proceso a partir de su respuesta temporal, el cual resultóser un procedimiento sumamente sencillo que permitía la aproximación de la función de transferencia a la de
13

1 Respuesta Frecuencial
un sistema de primer o segundo orden, según fuese el caso. La identificación que se estudiará en esta sección sefundamenta en el conocimiento de la respuesta frecuencial del proceso, a partir de la cual será posible identificarde forma más detallada los distintos factores que conforman una función de transferencia. El procedimiento pararealizar una identificación frecuencial puede resumirse a continuación tal como se muestra.
• Análisis a baja frecuencia
◦ Para el caso de la amplitud logarítmica se debe observar si presenta o no pendiente, pues eso deter-minará la presencia de polos el origen. Si la curva no tiene pendiente el sistema será de tipo 0 y laganancia se calculará a partir del valor del 20log |G( jω)| = 20logK. Si posee pendiente el tipo delsistema dependerá de la pendiente, es decir, será de tipo I si la pendiente es de −20 dB/dc, tipo II sila pendiente es de −40 dB/dc y así sucesivamente. En este caso, la ganancia debe calcularse leyendoel valor de la magnitud y comparándolo con el que debería tener si no existiese ganancia, de existiruna diferencia, sería debida a la ganancia.
◦ Para el caso de la fase se debe observar a que valor tiende, si tiende a 00 indica que no hay polosni ceros en el origen, en tanto si tiende a ±n900 ello indicaría la presencia de n polos o ceros en elorigen.
• Análisis a alta frecuencia
◦ Para el caso de la amplitud logarítmica se debe observar el valor de la pendiente que definirá ladiferencia entre los polos y los ceros de la función de transferencia, pues para m ceros y n polos,dicha pendiente será igual a (n−m)(−20 dB/dc).
◦ Para el caso de la fase se debe observar la tendencia pues ello debe coincidir con el diagrama deamplitud en lo que respecta a la diferencia entre polos y ceros, es decir, dicho valor será igual a(n−m)
(−900
). De no cumplirse con esta característica se trataría de un sistema de fase no mínima
que serán estudiados posteriormente.
• Análisis de los valores intermedios
◦ Se debe analizar primero la fase para determinar la ocurrencia de polos o ceros, basándose en elhecho de que los ceros elevan el diagrama y los polos lo bajan.
◦ En base a lo anterior se deben ubicar las rectas de las aproximaciones asintóticas tal que coincidancon los razonamientos anteriores.
Ejemplo 1.4 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.10, se solicita queidentifique la función de transferencia que lo representa.
14

1.3 Identificación de un proceso a partir de su diagrama de Bode
10−1
100
101
102
103
104
−100
−80
−60
−40
−20
0
20
40
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−180
−150
−120
−90
−60
−30
0
Fase
(de
g)
Frecuencia (r/s)
Figure 1.10: Diagrama de Bode. Identificación I
SoluciónTal como se mencionó en el procedimiento anterior se realizará el análisis a baja frecuencia, a alta frecuenciay en los valores intermedios.
• Análisis a baja frecuencia
◦ El diagrama de magnitud no presenta pendiente por lo que la función de transferencia será de tipo0.
◦ 20logK = 20 dB ⇒ K = 10
◦ La fase tiende a 00, lo cual coincide con lo esperado, es decir, la función de transferencia será detipo 0.
• Análisis a alta frecuencia
◦ El diagrama de magnitud la pendiente tiende a −40 dB/dc y la fase a −1800, por lo que se concluyeque m−n = 2, es decir, existirán dos polos más que ceros.
• Análisis a frecuencias intermedias
◦ Tanto la magnitud como la fase presentan unas curvas que decrecen monótonamente, por lo que seconcluye que no deben existir ceros sino solamente polos.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser como laexpresada por la Ec. 1.26 o la Ec. 1.27. Hay que comprobar la frecuencia de ocurrencia de los polos verificandosi las aproximaciones asintóticas corresponden con un caso o con el otro. Las aproximaciones asintóticas sobreel diagrama de amplitud se muestran en la Fig. 1.11, a partir de donde se puede identificar la función detransferencia tal como lo expresa la Ec. 1.28.
G(s) =K
(τ1s+1)(τ2s+1)(1.26)
15

1 Respuesta Frecuencial
G(s) =K
(τs+1)2 (1.27)
G(s) =10( 1
10 s+1)( 1
100 s+1) (1.28)
10−1
100
101
102
103
104
−100
−80
−60
−40
−20
0
20
40
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−180
−150
−120
−90
−60
−30
0
Fase
(de
g)
Frecuencia (r/s)
− 20 dB/dc
− 40 dB/dc
Siempre decreciente
w1
w2
Comienza en 0
Termina en −180
Figure 1.11: Diagrama de Bode asintótico. Identificación I
Ejemplo 1.5 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.12, se solicita queidentifique la función de transferencia que lo representa.
16

1.3 Identificación de un proceso a partir de su diagrama de Bode
10−1
100
101
102
−80
−70
−60
−50
−40
−30
−20
−10
0
10
20
Mag
nitu
d (d
B)
10−1
100
101
102
−300
−250
−200
−150
−100
−50
Fase
(de
g)
Frecuencia (r/s)
Figure 1.12: Diagrama de Bode. Identificación II
SoluciónTal como en el ejemplo anterior se realizará el análisis a baja frecuencia, a alta frecuencia y en los valoresintermedios.• Análisis a baja frecuencia
◦ El diagrama de magnitud presenta una pendiente igual a −20 dB/dc por lo que la función de trans-ferencia será de tipo I.◦ Para una ω = 0,1 la magnitud es de aproximadamente 16 dB, la cual debería ser de 20 dB si la
ganancia fuese unitaria. Ello indica que la ganancia hace que el diagrama baje −4 dB, por lo quela misma puede calcularse como sigue, 20logK =−4 dB ⇒ K = 0,63◦ La fase tiende a −900, lo cual coincide con lo esperado, es decir, la función de transferencia será
de tipo I.
• Análisis a alta frecuencia
◦ En el diagrama de magnitud la pendiente tiende a −60 dB/dc y la fase a −2700, por lo que seconcluye que m−n = 3, es decir, existirán tres polos más que ceros.
• Análisis a frecuencias intermedias
◦ La fase aumenta ligeramente a baja frecuencia y luego decrece todo el tiempo, al igual que lapendiente que comienza negativa y tiende a cero para luego pasar a ser negativa, lo cual indica laocurrencia de un cero a bajas frecuencias. Adicionalmente se observa un pico en el diagrama demagnitud, lo que implica que existen un par de polos conjugados, los cuales deben sumarse al poloen el origen y a otro polo adicional para que m−n = 3.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser comola que se expresa por la Ec. 1.29, de la cual solo hay que comprobar la frecuencia de ocurrencia de los distintosfactores. Podría ocurrir primero el polo en el eje real y luego los polos conjugados o viceversa. La determina-ción de quien ocurre primero dependerá de las aproximaciones asintóticas que sean más concordantes con eldiagrama de Bode. Al dibujar las aproximaciones asintóticas sobre el diagrama de amplitud, tal como se mues-tra en la Fig. 1.13, se determina que ocurre primero el polo en el eje real. Solamente restaría determinar el
17

1 Respuesta Frecuencial
valor del ζ , lo que se realiza leyendo el Mr(dB) y utilizando la Ec. 1.30. Finalmente la función de transferenciaquedará identificada tal como lo expresa la Ec. 1.31.
G(s) =K (τ1s+1)
s(τ2s+1)[(
1ω2
n
)s2 +
(2ζ
ωn
)s+1
] (1.29)
20logMr = 12 dB ⇒ Mr =1
2ζ√
1−ζ 2= 4 ⇒ ζ = 0,126 (1.30)
G(s)0,63(s+1)
s(
11,8 s+1
)[( 164
)s2 +
(2∗0,126
64
)s+1
] (1.31)
10−1
100
101
102
−80
−70
−60
−50
−40
−30
−20
−10
0
10
20
Mag
nitu
d (d
B)
10−1
100
101
102
−300
−250
−200
−150
−100
−50
Fase
(de
g)
Frecuencia (r/s)
w1 w2 w3
20 log Mr = 12 dB
Comienza en − 90
Creciente
Decreciente
Decreciente
Termina en −270
− 20 dB/dc − 20 dB/dc
− 60 dB/dc
Figure 1.13: Diagrama de Bode asintótico. Identificación II
Ejemplo 1.6 Para un sistema de control se dispone, en la Fig. 1.14, de la respuesta frecuencial del sistema alazo abierto. A partir de allí se desea conocer ciertas características del sistema a lazo cerrado.
18

1.3 Identificación de un proceso a partir de su diagrama de Bode
10−2
10−1
100
101
102
103
104
−100−80−60−40−20
020406080
100120140
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
104
−230−220−210−200−190−180−170−160−150−140−130−120−110−100
−90
Fase
(gr
ados
)
Frecuencia (r/s)
Figura 1.14: Respuesta frecuencial
SoluciónSe realizará el análisis a baja frecuencia, a alta frecuencia y en los valores intermedios.
• Análisis a baja frecuencia
◦ La fase tiende a −180o y la pendiente se puede aproximar a −40 dB/dc, de allí que se concluye quees de tipo II.
◦ En el diagrama de amplitud se observa que para una frecuencia ω = 0,01 la amplitud logarítmicaes aproximadamente 127 dB, lo que indica la existencia de una ganancia mayor que uno, pues si laganancia fuese uno dicho valor debería encontrarse en 80 dB. De allí que el valor de la gananciase calcula como sigue, 20log(K) = 127 dB−80 dB = 47 dB ⇒ K = 223,87
◦ Para una ω = 0,1 la magnitud es de aproximadamente 16 dB, la cual debería ser de 20 dB si laganancia fuese unitaria. Ello indica que la ganancia hace que el diagrama baje −4 dB, por lo quela misma puede calcularse como sigue, 20logK =−4 dB ⇒ K = 0,63
• Análisis a alta frecuencia
◦ En el diagrama de magnitud la pendiente tiende a−20 dB/dc y la fase a−900, por lo que se concluyeque m−n = 1, es decir, existirá un polo más que ceros.
• Análisis a frecuencias intermedias
◦ En el diagrama de fase a baja frecuencia se observa un aumento ligero de fase desde los −180o, loque indica la aparición de un cero, luego decae importantemente cruzando los −180o, por lo quedeben haber dos polos. Finalmente vuelve a subir la fase para alcanzar los −90o , lo cual se debe ala aparición de dos ceros más.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia será entonces comose muestra en el Ec. 1.32. Los valores de las constantes de tiempo correspondientes se obtendrán ubicando lasaproximaciones asintóticas del diagrama de Bode, tal como se muestra en la Fig. 1.15. Finalmente, la funciónde transferencia para el sistema a lazo abierto podrá ser aproximada a la que se muestra en la Ec. 1.33.
19

1 Respuesta Frecuencial
G(s) =K (T1s+1)(T3s+1)2
s2 (T2s+1)2 (1.32)
G(s) =223,87(s+1)
( 1190 s+1
)2
s2( 1
10 s+1)2 (1.33)
10−2
10−1
100
101
102
103
104
−100−80−60−40−20
020406080
100120140
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
104
−230−220−210−200−190−180−170−160−150−140−130−120−110−100
−90
Fase
(gr
ados
)
Frecuencia (r/s)
Decreciente
Creciente Creciente
Comienza en − 180
Termina en −90
− 40 dB/dc
− 20 dB/dc
− 20 dB/dc
− 60 dB/dc
w2
w1
w3
Figura 1.15: Aproximaciones Asintóticas
1.4. Relación entre la curva de amplitud logarítmica y el error
Considerando un sistema de control de retroalimentación simple, es posible utilizar la respuesta frecuencial alazo abierto para conocer el error a lazo cerrado. Es importante recordar que el error de un sistema dependedel tipo del sistema y de la entrada a la cual se vea sometido, pudiéndose calcular el error en función de loscoeficientes de error estático Kp, Kv y Ka. A continuación se mostrará, según el tipo del sistema, como puedeser utilizada la respuesta frecuencial a lazo abierto para el cálculo del error.
Kp = lıms→0
G(s) Kv = lıms→0
sG(s) Ka = lıms→0
s2G(s)
1.4.1. Sistemas tipo 0
Para un sistema tipo 0 cuando la frecuencia tiende a cero, G( jω) tiende a Kp, por lo que a partir de la gráfica deamplitud logarítmica se puede obtener Kp, pues a baja frecuencia la amplitud logarítmica de 20log |G( jω)| seráigual a 20logKp. En la Fig. 1.16 se puede apreciar lo enunciado anteriormente.
20

1.4 Relación entre la curva de amplitud logarítmica y el error
Figure 1.16: Diagrama de amplitud. Determinación de K p
1.4.2. Sistemas Tipo I
Para un sistema de tipo I para cuando ω � 1 se puede aproximar el módulo del G( jω) según se muestra en laEc. 1.34, lo cual equivale a un polo en el origen, por lo que se representa como una recta de pendiente−20 dB/dc
a baja frecuencia. Si se evalúa esta aproximación en ω = 1 se tiene que para esa frecuencia la recta tiene unamagnitud igual a 20logKv, gracias a lo cual se podrá obtener fácilmente el valor de Kv. Adicionalmente, si seextiende la dicha recta hasta que corte los 0 dB, se determina que dicho valor de frecuencia, ω1, será igual a Kv,tal como lo expresa la Ec.1.36, por lo que también podrá obtenerse Kv de esa forma.
G( jω)→ Kv
jω⇒ |G( jω)|= Kv
ω⇒ 20log |G( jω)|= 20log
(Kv
ω
)(1.34)
20log(
Kv
ω
)∣∣∣∣ω=1
= 20logKv (1.35)
20log∣∣∣∣Kv
ω
∣∣∣∣ω=ω1
= 0 dB ⇒ ω1 = Kv (1.36)
Para una función de transferencia particular, en la Fig. 1.17, se aprecia lo mencionado anteriormente, pudiéndosedeterminar Kv tal como sigue,
20logKv ≈ 12dB ⇒ Kv ≈ 4
ω1 = Kv ≈ 4
21

1 Respuesta Frecuencial
Figure 1.17: Diagrama de amplitud. Determinación de Kv
Es importante destacar que para obtener el valor del 20logKv se debe utilizar la aproximacion a baja frecuenciay no la curva real, pues ello es lo que se desprende de la Ec. 1.35.
1.4.3. Sistemas Tipo II
Para un sistema de tipo II para cuando ω � 1 se puede aproximar el módulo del G( jω) según se muestra en laEc. 1.37, lo cual se representa como una recta de pendiente −40 dB/dc a baja frecuencia. Si además se evalúaesta aproximación en ω = 1 se tiene que para esa frecuencia la recta tiene una magnitud igual a 20logKa, graciasa lo cual se podrá obtener fácilmente el valor de Ka. Finalmente, si se extiende la recta hasta que corte los 0 dB,se determina que dicho valor de frecuencia, ω1, será igual a la
√Ka, tal como lo expresa la Ec.1.39.
G( jω)→ Ka
( jω)2 ⇒ |G( jω)|= Ka
ω2 ⇒ 20log |G( jω)|= 20log(
Ka
ω2
)(1.37)
20log(
Ka
ω2
)∣∣∣∣ω=1
= 20logKa (1.38)
20log∣∣∣∣Ka
ω2
∣∣∣∣ω=ω1
= 0 dB ⇒ ω1 =√
Ka (1.39)
En la Fig. 1.18, se puede apreciar lo mencionado anteriormente pero en forma gráfica, pudiéndose determinarKa tal como sigue,
20logKa ≈ 40dB ⇒ Ka ≈ 100
ω1 =√
Ka ≈ 10 ⇒ Ka ≈ 100
22

1.5 Relación entre el diagrama de amplitud logarítmica y la respuesta transitoria a lazo cerrado
Figure 1.18: Diagrama de amplitud. Determinación de Ka
Es importante destacar que para obtener el valor del 20logKa se debe utilizar la aproximacion a baja frecuenciay no la curva real, pues ello es lo que se desprende de la Ec. 1.38.
En todos los casos se observa que, sin necesidad de conocer la función de transferencia del lazo abierto, el usodel diagrama de amplitud permite obtener un valor aproximado de los coeficientes de error.
1.5. Relación entre el diagrama de amplitud logarítmica y la
respuesta transitoria a lazo cerrado
Para un sistema a lazo cerrado con retroalimentación unitaria se define M(s) como la función de transferenciaa lazo cerrado, en función de la función de transferencia a lazo abierto G(s), tal como lo expresa la Ec. 1.40. Apartir allí se obtiene el diagrama de amplitud a lazo cerrado sustituyendo s = jω y representado dicha amplitudsegún la Ec. 1.41. Considerando un sistema particular a lazo cerrado con ganancia unitaria cuyo diagrama deamplitud se muestra en la Fig. 1.19, se define la frecuencia de corte ωb como la frecuencia a partir de la cual lamagnitud a lazo cerrado está por debajo de los −3 dB, de allí que el ancho de banda se define como el rangode frecuencias entre 0 ≤ ω ≤ ωb. De igual forma, para sistemas a lazo cerrado cuya ganancia no sea unitaria,el valor de la frecuencia de corte ωb es aquella frecuencia en la cual la magnitud está −3 dB por debajo de suvalor de frecuencia cero, tal como lo expresa la Ec. 1.42.
M(s) =C(s)R(s)
=G(s)
1+G(s)(1.40)
20log |M( jω)|= 20log∣∣∣∣ G( jω)
1+G( jω)
∣∣∣∣ (1.41)
|M( jω)|< |M( j0)|−3 dB, ω > ωb (1.42)
23

1 Respuesta Frecuencial
Figura 1.19: Gráfica de la amplitud a lazo cerrado. Ancho de Banda
El ancho de banda viene a ser una característica del sistema íntimamente relacionada con la respuesta transitoriadel sistema, siendo las siguientes consideraciones las que se deben tomar en cuenta al analizar un sistema a lazocerrado.• La respuesta del sistema para valores de frecuencia mayores al ωb estará atenuada.• El ancho de banda puede definirse como la capacidad que tiene un sistema a lazo cerrado de reproducir
adecuadamente una señal de entrada.• Para un ancho de banda grande corresponde una rapidez de la respuesta alta, o lo que es lo mismo, el
ancho de banda es directamente proporcional a la velocidad de respuesta.• El valor del ancho de banda se encuentra limitado pues el ruido ocurre a alta frecuencia y debe evitarse
que el mismo perturbe la salida.Tal como se describió anteriormente, el ancho de banda es una característica del sistema a lazo cerrado, cuyovalor puede ser identificado a partir del diagrama de amplitud del sistema a lazo cerrado. Así mismo, se puedeutilizar el diagrama de amplitud a lazo abierto para conocer el ancho de banda a lazo cerrado pues las carac-terísticas del diagrama de amplitud a alta frecuencia son bastantes parecidas tanto a lazo cerrado como a lazoabierto, tal como se aprecia en la Fig. 1.20, en donde se comparan los diagramas de amplitud logarítmica de unsistema a lazo a bierto y otro a lazo cerrado.
Figura 1.20: Gráficas de la amplitud a lazo abierto y cerrado. Ancho de Banda
Ejemplo 1.7 Considere que, para dos sistemas de control de retroalimentación simple, se tienen los diagramasde Bode del lazo abierto mostrados en las Figs. 1.10 y 1.12. A partir de allí se desea que Ud. determine el erroral escalón, rampa y parábola y el ancho de banda en cada caso.
24

1.5 Relación entre el diagrama de amplitud logarítmica y la respuesta transitoria a lazo cerrado
SoluciónPara calcular el error se hace uso del diagrama de amplitud, a partir del cual se puede concluir respecto altipo del sistema y obtener gráficamente el valor del coeficiente estático de error respectivo. En cuanto al anchode banda tambien es posible leerlo del diagrama de amplitud tal como se muestra a continuación.
Primer caso
En la Fig. 1.21 se aprecia que el diagrama de amplitud no tiene pendiente a baja frecuencia por lo que elsistema a lazo abierto es de tipo “0” y por ello el error al escalón es finito, en tanto que el error a la rampa y ala parábola son infinitos. Para el cálculo de dicho error se determina el Kp a partir del diagrama de amplitudy finalmente el ancho de banda también se aprecia en la misma figura.
Figura 1.21: Diagrama de amplitud. Determinación de Kp y ancho de banda.
20logKp = 20dB ⇒ Kp ≈ 10 ⇒ ess =1
1+KP= 0,09
AB≈ 140 rad/s
Segundo casoEn la Fig. 1.22 se aprecia que el diagrama de amplitud comienza con una pendiente de −20 dB/dc a bajafrecuencia por lo que el sistema a lazo abierto es de tipo “I” y por ello el error al escalón es cero, en tanto queel error a la rampa es finito y a la parábola infinito. Para el cálculo de dicho error se determina el Kv a partirdel diagrama de amplitud, utilizando cualquiera de los dos métodos gráficos propuestos, y finalmente el anchode banda se aprecia en la Fig. 1.23.
20logKv ≈−4dB ⇒ Kv ≈ 0,63 ⇒ ess =1
Kv= 1,58
ω ≈ 0,6 ⇒ Kv ≈ 0,6 ⇒ ess =1
Kv= 1,66
Se pueden tomar cualquiera de los dos valores como válidos pues ambos son una lectura aproximada en eldiagrama de amplitud. Es importante recordar que este método de cálculo del error se utiliza si no es conocidala función de transferencia que generó el diagrama de Bode.
AB≈ 1,15 rad/s
25

1 Respuesta Frecuencial
Figura 1.22: Diagrama de amplitud. Determinación de Kv.
Figura 1.23: Diagrama de amplitud. Determinación del ancho de banda.
1.6. Diagramas Polares
Tal como se mencionó anteriormente, la respuesta frecuencial es representada en este libro utilizando dos tiposde diagrama, por lo que a continuación se describe el procedimiento para obtener la respuesta frecuencial rep-resentada como diagramas polares. Dichos diagramas son una representación de la respuesta frecuencial de unsistema, en la cual se utiliza el plano s para representar punto a punto la variación de G( jω) cuando 0≤ω ≤∞,en otras palabras, es el lugar geométrico de los vectores que representan el módulo y la fase de G( jω) para esosvalores de frecuencia. El procedimiento a seguir para la obtención de un diagrama polar difiere de lo realizadopara los diagramas de Bode, pues los mismos no tienen las mismas características de aditividad que tienen losdiagramas de Bode. Es por ello que para la obtención de un diagrama polar no se parte del desarrollo previo delos diferentes factores que conforman una función de transferencia, sino que se analiza cada caso en particular.Cabe destacar que, habiendo estudiado previamente los diagramas de Bode, esto puede servir de base para elestudio de los diagramas polares que se desarrollarán a continuación.
Una ganancia solamente modifica el módulo de la respuesta frecuencial por lo que su efecto sobre un diagramapolar es aumentar el módulo proporcionalmente a la ganancia sin afectar la fase. Para el caso de un polo o ceroen el origen, en la Fig. 1.24(a) se muestran los diagramas polares correspondientes, los cuales se fundamentanen los razonamientos realizados para la obtención de los diagramas de Bode para estos factores. Así mismo, semuestra en la Fig. 1.24(b) los diagramas polares para un polo y un cero en el eje real.
26

1.6 Diagramas Polares
(a) polo y cero en el origen (b) Polo y cero en el eje Real
Figure 1.24: Diagramas polares
Para obtener el diagrama polar de una función de transferencia cualquiera se plantea, a continuación, una meto-dología sencilla, en la cual se realizará un análisis de la fase para todo el barrido de frecuencia con lo que podráaproximarse la forma del diagrama polar.• Sustituir en la función de transferencia del sistema s = jω , de forma tal que se tenga la respuesta frecuen-
cial a representar.• Determinar la contribución de cada uno de los factores por separado, tanto a baja como a alta frecuencia,
de forma tal que se conocerá donde comienza y donde termina el diagrama polar.• Debido a que los sistemas bajo estudio siempre tienen más polos que ceros, el módulo de la respuesta
frecuencial siempre tenderá a cero cuando ω tienda a infinito. Por ello solamente se debe determinarcomo comienza el módulo a baja frecuencia pues se sabe que a medida que aumenta la frecuencia dichomódulo irá tendiendo a cero.
• Finalmente, la forma del diagrama quedará determinada por la aparición de los distintos factores y de sucontribución a la fase.
A continuación se mostrarán varios ejemplos de forma tal que ello permita generalizar una metodología paraobtener los diagramas polares.
Ejemplo 1.8 Desarrolle el diagrama polar para un sistema cuya función de transferencia se expresa según laEc. 1.43.
G(s) =1
s(τs+1)(1.43)
SoluciónRespuesta frecuencial a representar,
G( jω) =1
jω (τ jω +1)
Contribución de cada uno de los factores por separado tanto a baja y como a alta frecuencia ,
1jω
1(τ jω+1)
ω → 0modulo→ ∞
φ =−900modulo = 1
φ = 00
ω → ∞modulo→ 0φ =−900
modulo→ 0φ =−900
27

1 Respuesta Frecuencial
De la tabla anterior se desprende que el diagrama comenzará con un módulo infinito y una fase de −900 yterminará con módulo cero y una fase de −1800. Ahora, en las frecuencias intermedias el comportamiento dela fase estará determinado por la aparición del polo en el eje real, el cual añade una fase de −900. Tomandoen cuenta estos razonamientos se obtiene el diagrama polar que se muestra en la Fig. 1.25.
Figure 1.25: Diagrama polar G(s) = 1s(τs+1)
Ejemplo 1.9 Desarrolle el diagrama polar para un sistema cuya función de transferencia se expresa según laEc. 1.44, para la cual se debe considerar que τ1 > τ2 > τ3.
G(s) =K (τ2s+1)2
s(τ1s+1)(τ3s+1)(1.44)
SoluciónRespuesta frecuencial a representar,
G( jω) =K (τ2ω j+1)2
ω j (τ1ω j+1)(τ3ω j+1)
Contribución de cada uno de los factores por separado tanto a baja como a alta frecuencia,
K 1jω (τ1ω j+1)2 (τ2ω j+1)−1 (τ3ω j+1)−1
ω → 0modulo = K
φ = 00modulo→ ∞
φ =−900modulo→ 1
φ = 00modulo→ 1
φ = 00modulo→ 1
φ = 00
ω → ∞modulo = K
φ = 00modulo→ 0φ =−900
modulo→ ∞
φ = 1800modulo→ 0φ =−900
modulo→ 0φ =−900
De la tabla anterior se desprende que el diagrama comenzará con un módulo infinito y una fase de −900 yterminará con módulo cero y una fase de −900. Ahora, en las frecuencias intermedias el comportamiento de lafase estará determinado por el orden de aparición de los diferentes factores. Al aumentar la frecuencia apareceel primer polo, el que ocurre en s =−1/τ1, por lo que la fase se hace más negativa. Luego, con la aparición delos dos ceros, la fase se va haciendo menos negativa, cruzando el eje imaginario debido a que son dos ceros ysu contribución de 1800 hará que el vector tienda a tener una fase de 00, pero al aparecer el último polo la fasese hace más negativa tendiendo a −900. Tomando en cuenta estos razonamientos se obtiene el diagrama polarque se muestra en la Fig. 1.26.
28

1.6 Diagramas Polares
Figure 1.26: Diagrama polar G(s) = K(τ2s+1)2
s(τ1s+1)(τ3s+1)
1.6.1. Formas generales
Los diagramas polares presentan unas formas generales que dependen exclusivamente del tipo del sistema y dela diferencia entre el número de polos y de ceros de la función de transferencia, pues ello define la tendencia deldiagrama tanto a baja como a alta frecuencia, atl como se muestra a continaución. A partir de allí se representanlas formas generales, que se muestran en la Fig. 1.27, de forma tal que puedan utilizarse para desarrollar dia-gramas polares con mayor facilidad. Como se puede observar, dichas formas solamente ofrecen las tendenciasen los valores extremos de la frecuencia, lo cual es debido a que lo que sucede en las frecuencias intermediasdependerá de la forma particualr de cada función de transferencia.
Tipo 0 Tipo I Tipo II
ω → 0|G( jω)|= K
φ = 00|G( jω)| → ∞
φ =−900|G( jω)| → ∞
φ =−1800
ω → ∞|G( jω)| → 0
φ = (m−n)(−900) |G( jω)| → 0
φ = (m−n)(−900) |G( jω)| → 0
φ = (m−n)(−900)
Figure 1.27: Formas generales de lso diagramas polares
29

1 Respuesta Frecuencial
Ejemplo 1.10 Desarrolle el diagrama polar para un sistema cuya función de transferencia se expresa según laEc. 1.45, para la cual debe considerar que τ1 > τ2 > τ3. Posteriormente, añada un polo en el origen y realiceel nuevo diagrama polar.
G(s) =K (τ3s+1)
(τ1s+1)2 (τ2s+1)(1.45)
SoluciónComo se puede observar el sistema es de tipo cero, por lo que el diagrama polar comenzará a baja frecuenciacon módulo finito y φ = 00, en tanto que, cuando la frecuencia tienda a infinito el módulo tenderá a ceroy φ = (m−n)
(−900
)= 2
(−900
)= −1800. En cuanto a lo que sucede en las frecuencias intermedias se
observa que, debido a los valores de las constantes de tiempo, primero ocurren los tres polos por lo que la fasese hará más negativa, llegando a valores más negativos que −1800; luego ocurre el cero que hará que la fasetienda a los −1800. En la Fig. 1.28 se puede observar el diagrama polar correspondiente.
Figure 1.28: Diagrama polar G(s) = K(τ3s+1)(τ1s+1)2(τ2s+1)
Al añadir un polo en el origen el sistema pasa a ser de tipo I, por lo que el diagrama polar comenzará a bajafrecuencia con módulo infinito y φ = −900, en tanto que, cuando la frecuencia tienda a infinito el módulotenderá a cero y φ = (m−n)
(−900
)= 3
(−900
)= −2700. En las frecuencias intermedias el diagrama será
idéntico al anterior pero con una rotación de −900. Finalmente, el mismo quedará como se muestra en la Fig.1.29.
Figure 1.29: Diagrama polar G(s) = K(τ3s+1)s(τ1s+1)2(τ2s+1)
30

1.6 Diagramas Polares
Ejemplo 1.11 Desarrolle el diagrama polar para un sistema cuya función de transferencia se expresa según laEc. 1.46, para la cual debe considerar que τ1 > τ2 > τ3 > τ4.
G(s) =K (τ2s+1)2
s2 (τ1s+1)(τ3s+1)(τ4s+1)(1.46)
SoluciónComo se puede observar el sistema es de tipo II, por lo que el diagrama polar comenzará a baja frecuencia conmódulo infinito y φ = −1800, en tanto que, cuando la frecuencia tienda a infinito el módulo tenderá a cero yφ = (m−n)
(−900
)= 3(−900
)=−2700. En cuanto a lo que sucede en las frecuencias intermedias se observa
que, debido a los valores de las constantes de tiempo, primero ocurre un polo que llevará a la fase a valoresmás negativos, es decir, más negativos que−1800; luego ocurren dos ceros que harán que la fase pase a valoresmayores a los −1800, para que luego aparezcan dos polos que finalmente llevarán a la fase a los −2700. En laFig. 1.30 se puede observar el diagrama polar correspondiente.
Figure 1.30: Diagrama polar G(s) = K(τ2s+1)2
s2(τ1s+1)(τ3s+1)(τ4s+1)
Ejemplo 1.12 Para el sistema de fase mínima cuyo diagrama polar es el que se muestra en la Fig. 1.31 deter-mine la forma de la función de transferencia.
Figure 1.31: Diagrama polar
Solución
El análisis a baja frecuencia, intermedia y alta proporcionará la información necesaria para realizar la identi-ficación solicitada. A baja frecuencia el diagrama polar comienza con un módulo infinito y una fase de −1800,
31

1 Respuesta Frecuencial
por loq ue se concluye que el sistema es de tipo “II”. A alta frecuencia el módulo tiende a cero y la fase a−2700, lo que indica que se tienen tres polos más que ceros, es decir, m−n = 3. A frecuencias intermedias, lafase comienza siendo un poco menos negativa lo que indica la aparición de un cero y luego decrece monóton-amente hasta tender a −2700, lo cual es debido a la aparición de dos polos más. basándose en lo anterior, sedetermina la forma de la función es como la que se muestra a continuación, donde T1 > T2.
G(s) =K (T1s+1)
s2 (T2s+1)2
1.7. Sistemas de fase no mínima
Los sistemas de fase no mínima son aquellos cuyas funciones de transferencia tienen ceros o polos con partereal positiva, siendo el comportamiento en la fase la diferencia entre dichos sistemas y los de fase mínima.Con la intencion de resaltar el comportamiento de la fase se realizará una comparación detallada entre de larespuesta frecuencial de un cero con parte real negativa y otro con parte real positiva. Se definen las funcionesde transferencia G1(s) y G2(s), tal como lo muestran las ecuaciones 1.47 y 1.48, respectivamente. Tal como serealizó previamente, se sustituye s = jω para obtener la respuesta frecuencial y representar el módulo y la fasede ambas funciones en un barrido de frecuencias de cero a infinito.
G1(s) = 1+ τs (1.47)
G2(s) = 1− τs (1.48)
G1( jω) = 1+ τω j |G1( jω)|=√
1+(τω)2
ω → 0 Re = 1 Im→ 0+ φ → 00
ω → ∞ Re = 1 Im→ ∞ φ → 900
G2( jω) = 1− τω j |G2( jω)|=√
1+(τω)2
ω → 0 Re = 1 Im→ 0− φ → 00
ω → ∞ Re = 1 Im→−∞ φ →−900
El diagrama de Bode para G1( jω) es igual al estudiado hasta ahora, en tanto que para G2( jω) se tendrá undiagrama de Bode como se muestra en la Fig. 1.32, donde se aprecia la diferencia en la fase.
32

1.7 Sistemas de fase no mínima
10−2
10−1
100
101
102
0
10
20
30
40
50
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figura 1.32: Diagramade Bode G2(s) = 1− τs
Para el caso en que se tenga un cero como el mostrado en la Ec. 1.49, el módulo seguirá siendo el mismo que semostró anteriormente pero la fase tendrá un comportamiento diferente debido a que el cambio de signos entrela parte real y la imaginaria afecta el ángulo, tal como se muestra a continuación,
G3(s) = τs−1 (1.49)
G3( jω) = τω j−1 |G3( jω)|=√(τω)2 +1
ω → 0 Re→−1 Im→ 0+ φ → 1800
ω → ∞ Re→−1 Im→ ∞ φ → 900
10−2
10−1
100
101
102
0
10
20
30
40
50
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
90
135
180
Fase
(gr
ados
)
Frecuencia (r/s)
Figura 1.33: Diagrama de Bode G3(s) = τs−1
33

1 Respuesta Frecuencial
Para el caso de polos de fase no mínima, se desarrollan los diagramas de Bode para dos sistemas cuyas funcionesde transferencia se muestran en las Ecs. 1.50 y 1.51.
G4(s) =1
τs−1(1.50)
G5(s) =1
1− τs(1.51)
El módulo para ambos casos es igual, el cual coincide completamente con el módulo del polo con parte realnegativa, tal como se describió en secciones anteriores. La fases, por el contrario, tendrán un comportamientodiferente,
G4( jω) = 1−1+τω j G4( jω) = −1−τω j
1+(τω)2 |G4( jω)|=(
1+(τω)2)−1/2
ω → 0 Re =−1 Im→ 0− φ →−1800
ω → ∞ Re =−1 Im→ ∞− φ →−900
G5( jω) = 11−τω j G5( jω) = 1+τω j
1+(τω)2 |G5( jω)|=(
1+(τω)2)−1/2
ω → 0 Re = 1 Im→ 0− φ → 00
ω → ∞ Re = 1 Im→ ∞ φ → 900
Para ambos casos se muestran los diagramas de Bode correspondientes en las Figs. 1.34 (a) y (b).
10−2
10−1
100
101
102
−40
−30
−20
−10
0
10
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
−180
−135
−90
Fase
(gr
ados
)
Frecuencia (r/s)
(a) G4(s) = 1τs−1
10−2
10−1
100
101
102
−40
−30
−20
−10
0
10
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
0
20
40
60
80
100
Fase
(gr
ados
)
Frecuencia (r/s)
(b) G5(s) = 11−τs
Figura 1.34: Diagramas de Bode
Cuando se analiza una función de transferencia de fase mínima se puede observar en el diagrama de Bo-de que cuando la frecuencia tiende a infinito la pendiente en el diagrama de amplitud logarítmica tiende a(n−m)(−20 dB/dc) y la fase tiende a (n−m)
(−900
), lo cual no ocurre para los sistemas de fase no mínima.
34

1.7 Sistemas de fase no mínima
Así mismo, a baja frecuencia el comportamiento de los sistemas de fase mínima también podrían presentar dis-crepancias con el esperado para los de fase mínima. El comportamiento del diagrama de amplitud logarítmicaes igual al estudiado hasta ahora pues el módulo de la función no se ve afectado por el término negativo, pero lafase no se comporta de igual forma y debe ser analizada en forma particular.
1.7.1. Retardo de Transporte
El retardo de transporte o tiempo muerto fue definido previamente como el tiempo que tarda en responder unproceso cuando se le aplica una entrada y su función de transferencia puede aproximarse a la que muestra la Ec.1.52, donde Td es el tiempo muerto o de retardo. Este tipo de característica es bastante común para los sistemastérmicos, fluídicos y neumáticos.
G(s) = e−Tds (1.52)
Para representar la repuesta frecuencial se debe obtener, tanto el módulo como la fase de dicha función y a partirde allí se muestra el diagrama de Bode del retardo en la Fig. 1.35.
|G( jω)|= |cosωTd− senωTd |= 1 ⇒ 20log |G( jω)|= 0dB
φ =−ωTd (radianes) φ =−57,3ωTd (grados)
100
101
102
103
−1
−0.5
0
0.5
1
Mag
nitu
d (d
B)
100
101
102
103
−3
−2.5
−2
−1.5
−1
−0.5
0x 10
4
Fase
(gr
ados
)
Frecuencia (r/s)
Figura 1.35: Diagrama de Bode G(s) = e−Tds
1.7.2. Identi�cación de sistemas de fase no minima
El procedimiento es similar al presentado para sistemas de fase mínima, pues se analizará lo que sucede conla amplitud y la fase en todo el barrido de frecuencias. A continuación se presentarán algunos ejemplos con laintención de dejar en claro el procedimiento propuesto.
Ejemplo 1.13 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.36, se solicita queidentifique la función de transferencia que lo representa.
35

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
−40
−30
−20
−10
0
10
20
30
40
Mag
nitu
d (d
B)
10−3
10−2
10−1
100
101
102
103
104
−360
−315
−270
−225
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.36: Diagrama de Bode
SoluciónSe realizará el análisis a baja frecuencia, a alta frecuencia y en los valores intermedios.
• Análisis a baja frecuencia
◦ El diagrama de magnitud no presenta pendiente por lo que la función de transferencia será de tipo0.
◦ 20logK = 30 dB ⇒ K = 31,62
◦ La fase tiende a 00, lo cual coincide con lo esperado, es decir, la función de transferencia será detipo 0.
• Análisis a alta frecuencia
◦ En el diagrama de magnitud la pendiente tiende a−40dB/dc y la fase a−3600, por lo que se concluyeque el sistema debe ser de fase no mínima. La pendiente a alta frecuencia igualmente identifica ladiferencia entre polos y ceros, es decir, siendo m−n = 2, existirán dos polos más que ceros.
• Análisis a frecuencias intermedias
◦ La magnitud presenta una curva cuya pendiente comienza con 0 dB/dc luego decrece y pasa a sernuevamente 0dB/dc, a partir de allí decrece monótonamente. Esto indica la presencia de al menos uncero, lo cual será comprobado con las aproximaciones asintóticas a realizar. En lo que respecta a lafase se observa que decrece monótonamente, por lo que se puede concluir que el cero identificadodebe ser de fase no mínima pues su fase decrece igual que la de un polo. Por ello sería posible quela función de transferencia a identificar tenga tres polos y un cero. Además el cero debe ser deltipo (1− τs) pues su fase comienza 00 para luego decaer a −900, lo que coincide con el análisisrealizado a baja y alta frecuencia.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser como laque se expresa por la Ec. 1.53 o por la Ec. 1.54. La escogencia de una u otra dependerá de las aproximaciones
36

1.8 Ejercicios Resueltos
asintóticas que se logren dibujar sobre el diagrama de amplitud, las cuales además identificarán la frecuenciade ocurrencia de los distintos factores. En la Fig. 1.37 se muestran dichas asíntotas, a partir de allí se puedeidentificar la función de transferencia tal como lo expresa la Ec. 1.55.
G(s) =K (1− τ2s)
(τ1s+1)(τ3s+1)(τ4s+1)(1.53)
G(s) =K (1− τ2s)
(τ1s+1)(τ3s+1)2 (1.54)
G(s) =31,62(1−10s)(
10,8 s+1
)( 121 s+1
)( 1140 s+1
) (1.55)
10−2
10−1
100
101
102
103
−40
−30
−20
−10
0
10
20
30
40
Mag
nitu
d (d
B)
10−3
10−2
10−1
100
101
102
103
104
−360
−315
−270
−225
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Monótonamente decreciente
w1
0 dB/dc− 20 dB/dc
− 40 dB/dc
− 20 dB/dc
w2 w3
w4
Comienza en 0
termina en −360
Figure 1.37: Diagrama de Bode asintótico
1.8. Ejercicios Resueltos
Problema resuelto 1.1 Desarrolle el diagrama de Bode y polar para un sistema cuya función de transferenciase expresa según la Ec. 1.56.
G(s) =250000(s+10)
s2 (s+50)2 (s+100)(1.56)
Solución
37

1 Respuesta Frecuencial
Para realizar el diagrama de Bode se reordena la función de transferencia para identificar aisladamente cadauno de los factores que la conforman, lo cual queda descrito por la Ec. 1.57. A partir de allí se enumeran losdistintos factores, sus características y frecuencias de ocurrencia.
G(s) =250000
( s+1010
)10
s2( s+50
50
)2502( s+100
100
)100
=10( 1
10 s+1)
s2( 1
50 s+1)2 ( 1
100 s+1) (1.57)
• Ganancia K = 10
• Un polo doble en el origen
• Cero en el eje real( 1
10 s+1)⇒ ω1 = 10
• Polos dobles en el eje real( 1
50 s+1)−1 ⇒ ω2 = 50
• Polo en el eje real( 1
100 s+1)−1 ⇒ ω3 = 100
Se realizará en diagrama analizando la influencia de cada unos de los factores a frecuencias bajas, altas eintermedias.
Frecuencias bajas
• La ganancia contribuye con 20log(10) = 20dB.
• El polo doble en el origen contribuye con una pendiente de −40 dB/dc en el diagrama de amplitud y con−1800 en el diagrama de fase.
• La gráfica de amplitud comienza entonces con una recta de pendiente −40 dB/dc que arranca en ω = 1con una amplitud de 20 dB debidos a la ganancia.
Frecuencias altas
• Debido a que existen 4 polos más que ceros el diagrama de amplitud logarítmica tenderá a una rectacuya pendiente será de −80 dB/dc y la fase tenderá a −3600.
Frecuencias Intermedias
• La pendiente de la amplitud logarítmica que comienza en−40dB/dc, pasará a−20dB/dc cuando aparece elprimer cero en ω1, luego en ω2 pasará a−60 dB/dc debido a la ocurrencia del polo doble, para finalmentetender a −80 dB/dc en ω3 al ocurrir el último polo.
• La fase se comportará en forma semejante, comenzará en −1800 , crecerá un poco debido a la aparicióndel cero y luego decrecerá monótonamente tendiendo a −3600.
Finalmente, en la Fig. 1.38 se muestra el diagrama de Bode solicitado, en el cual se muestran las curvas realesy la aproximación asintótica.
38

1.8 Ejercicios Resueltos
100
101
102
103
−140
−120
−100
−80
−60
−40
−20
0
20
40
Mag
nitu
d (d
B)
100
101
102
103
−360
−315
−270
−225
−180
−135
Fase
(gr
ados
)
Frecuencia (r/s)
Creciente
− 40 dB/dc − 20 dB/dc
− 60 dB/dc
− 80 dB/dc w1
w2 w3
Comienza en − 180
Decreciente
Termina en −360
Figure 1.38: Diagrama de Bode. G(s) = 250000(s+10)s2(s+50)2(s+100)
Ahora, partiendo de las formas generales para los diagramas polares se tiene que, como el sistema es de tipoII, el diagrama polar comenzará a baja frecuencia con módulo infinito y φ = −1800, en tanto que, cuando lafrecuencia tienda a infinito el módulo tenderá a cero y φ = (m−n)
(−900
)= 4
(−900
)=−3600. En cuanto a
lo que sucede en las frecuencias intermedias se observa que, debido a los valores de las constantes de tiempo,primero ocurre el cero por lo que la fase se hará menos negativa, luego ocurren los tres polos por lo que la fasedecrecerá monótonamente hasta que tienda a los −3600. En la Fig. 1.39 se puede observar el diagrama polarcorrespondiente.
Figure 1.39: Diagrama polar G(s) = 250000(s+10)s2(s+50)2(s+100)
Problema resuelto 1.2 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.40, sesolicita que identifique la función de transferencia que lo representa.
39

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
104
−40
−20
0
20
40
60
80
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
104
−140
−120
−100
−80
−60
−40
Fase
(de
g)
Frecuencia (r/s)
Figure 1.40: Diagrama de Bode
SoluciónSe realizará el análisis a baja frecuencia, a alta frecuencia y en los valores intermedios.
• Análisis a baja frecuencia
◦ El diagrama de magnitud presenta una pendiente igual a −20 dB/dc por lo que la función de trans-ferencia será de tipo I.
◦ Para una ω = 0,01 la magnitud es de aproximadamente 72 dB, la cual debería ser de 40 dB si laganancia fuese unitaria. Ello indica que la ganancia hace que el diagrama suba 32 dB, por lo quela misma puede calcularse como sigue, 20logK ' 32 dB ⇒ K = 39,8.
◦ La fase tiende a −900, lo cual coincide con lo esperado, es decir, se confirma que la función detransferencia será de tipo I.
• Análisis a alta frecuencia
◦ En el diagrama de magnitud la pendiente tiende a−20 dB/dc y la fase a−900, por lo que se concluyeque m−n = 1, es decir, existirá un polo más que ceros. Así mismo, el sistema será de fase mínima.
• Análisis a frecuencias intermedias
◦ La pendiente de la magnitud y la fase comienzan disminuyendo, lo que indica la ocurrencia de unpolo. Luego la fase comienza a aumentar sobrepasando los−900 que inicialmente tenía sin alcanzarlos 900, igualmente la pendiente tiende a decrecer abruptamente, ambos comportamientos indicanla aparición de dos ceros que podrían ser iguales o diferentes dependiendo de las aproximacionesasintóticas que se apeguen más al diagrama. Finalmente, la pendiente decrece a −20dB/dc y la fasetiende a −900.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser comola que se expresa por la Ec. 1.58, de la cual solo hay que comprobar la frecuencia de ocurrencia de los polos.
40

1.8 Ejercicios Resueltos
Ello es posible dibujando las aproximaciones asintóticas sobre el diagrama de amplitud, tal como se muestraen la Fig. 1.41, a partir de donde se puede identificar la función de transferencia tal como lo expresa la Ec.1.59.
G(s) =K (τ2s+1)2
s(τ1s+1)(τ3s+1)(1.58)
G(s) =39,8
( 110 s+1
)2
s(s+1)( 1
100 s+1) (1.59)
10−1
100
101
102
103
104
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−140
−120
−100
−80
−60
−40
Fase
(de
g)
Frecuencia (r/s)
Fase comienza en −90 Fase termina en −90
− 20 dB/dc
− 20 dB/dc
− 40 dB/dc
w1
w2 w3
Fase aumenta Fase disminuye
Fase disminuye
Figure 1.41: Diagrama de Bode asintótico. Identificación
Problema resuelto 1.3 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.42, sesolicita que identifique la función de transferencia que lo representa.
41

1 Respuesta Frecuencial
10−1
100
101
102
103
104
−100
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−240−220−200−180−160−140−120−100
−80−60−40−20
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.42: Diagrama de Bode
SoluciónSe realizará el análisis a baja frecuencia, a alta frecuencia y en los valores intermedios.
• Análisis a baja frecuencia
◦ El diagrama de magnitud no presenta pendiente por lo que la función de transferencia será de tipo0.
◦ 20logK ≈ 55 dB ⇒ K ≈ 562
◦ La fase tiende a 00, lo cual coincide con lo esperado, es decir, la función de transferencia será detipo 0.
• Análisis a alta frecuencia
◦ El diagrama de magnitud la pendiente tiende a −40 dB/dc y la fase a −1800, por lo que se concluyeque m− n = 2, es decir, existirán dos polos más que ceros. Así mismo, la función de transferenciaes de fase mínima.
• Análisis a frecuencias intermedias
◦ La pendiente comienza decayendo a −40 dB/dc y la fase también decae más a llá de los −900, elloindica que puede haber un polo boble a baja frecuencia.
◦ Posteriormente, hay un ligero aumento en la fase, lo que indica la aparición de un cero simple.
◦ Al seguir aumentando la frecuencia se observa una caída abrupta en la fase y un sobreimpluso enla amplitud, prueba inequívoca de un par de polos conjugados.
◦ A continuación se destaca un leve aumento en la fase, lo que propone la aparición de un nuevo cero,necesario para confirmar la diferencia entre polos y ceros que se determinó con anterioridad. Asímismo, la pendiente cambia ligeramente para tender a con −40 dB/dc .
42

1.8 Ejercicios Resueltos
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser comola expresada por la Ec. 1.60, de la cual solo hay que comprobar la frecuencia de ocurrencia de los polos. Elloes posible dibujando las aproximaciones asintóticas sobre el diagrama de amplitud, tal como se muestra en laFig. 1.43. A partir de allí, se identifican las frecuencias de ocurrencia de los factores y el valor del Mr(dB),para poder finalmente aproximar la función de transferencia tal como lo expresa la Ec. 1.61.
G(s) =K (τ2s+1)(τ3s+1)
(τ1s+1)2[(
1ωn
)s2 +
(2ζ
ωn
)s+1
] (1.60)
20logMr = 15 dB ⇒ Mr =1
2ζ√
1−ζ 2= 5,62 ⇒ ζ = 0,089
G(s) =562
( 120 s+1
)( 1200 s+1
)(12 s+1
)2[( 1
80
)s2 +
(2ζ
80
)s+1
] (1.61)
10−1
100
101
102
103
104
−100
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−240−220−200−180−160−140−120−100
−80−60−40−20
0
Fase
(gr
ados
)
Frecuencia (r/s)
w3
w4
w2 w1
− 40 dB/dc − 20 dB/dc
− 40 dB/dc
20 log Mr = 15 dB
− 60 dB/dc
Comienza en −0
Termina en −180 Creciente
Creciente
Decreciente
Decreciente
Figure 1.43: Diagrama de Bode asintótico
Problema resuelto 1.4 Para un sistema cuya respuesta frecuencial es la que se muestra en la Fig. 1.42, sesolicita que identifique la función de transferencia que lo representa.
43

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
104
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
104
−180
−150
−120
−90
−60
−30
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figura 1.44: Diagrama de Bode
Solucióna) Al observar el diagrama de Bode del proceso es posible llegar a las siguientes conclusiones, a partir de lascuales se aproximará la forma de la función de transferencia a identificar.• El diagrama de amplitud a baja frecuencia no tiene pendiente y la fase tiende a cero, por lo que se puede
concluir que el proceso es de tipo 0.• 20logK = 48 dB ⇒ K ≈ 251, pues a ese valor tiende la amplitud a baja frecuencia.• A alta frecuencia la pendiente tiende a −40 dB/dc y la fase tiende a −180o, por lo que se concluye que el
sistema es de fase mínima y que la diferencia entre ceros y polos es de dos.• Cuando la frecuencia comienza a aumentar la pendiente cae con una pendiente aproximada de−40 dB/dc
y la fase, que se hace más negativa, tendiendo a los−180o. Ambos diagramas indican que lo primero queocurre son dos polos. Luego, al seguir incrementándose la frecuencia la fase presenta un ligero aumentopara finalmente decaer hacia los −180o. De allí se puede concluir que primero aparece un cero y luegoel último polo.
Una vez realizado el análisis anterior se puede concluir que la forma de la función de transferencia a identificarpodría ser cualquiera de las mostradas en las Ecs 1.62, 1.63 y 1.64.
G(s) =K (T2s+1)
(T1s+1)2 (T3s+1)(1.62)
G(s) =K (T3s+1)
(T1s+1)(T2s+1)(T4s+1)(1.63)
G(s) =K (T1s+1)[(
sωn
)2+(
2ξ sωn
)+1](T2s+1)
(1.64)
44

1.8 Ejercicios Resueltos
La escogencia definitiva de la función de transferencia dependerá de las aproximaciones asintóticas que sepuedan realizar sobre el diagrama de amplitud, la cuales se muestran en la Fig. 1.45.
10−2
10−1
100
101
102
103
104
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
104
−180
−150
−120
−90
−60
−30
0
Fase
(gr
ados
)
Frecuencia (r/s)
Creciente
Decreciente
Decreciente
Comienza en −0
Termina en −180
− 20 dB/dc
− 40 dB/dc
− 40 dB/dc
0 dB/dc
w1
w2
w3
Figura 1.45: Aproximaciones Asintóticas
Se observa que es posible aproximar a la función de transferencia presentada en la Ec. 1.62 y que los valo-res de las constantes de tiempo se obtienen del cruce de las asíntotas, quedando aproximada la función detransferencia del proceso tal como se muestra en la Ec. 1.65.
G(s) =251
( 120 s+1
)(s+1)2 ( 1
200 s+1) (1.65)
Problema resuelto 1.5 La respuesta frecuencial de un reactor químico corresponde con el diagrama de Bodeque se muestra en la Fig. 1.46. A partir de allí se desea obtener la siguiente información:
a) Para el sistema a lazo cerrado, determine el error al escalón, rampa y parábola unitarias, utilizando única-mente información proveniente del diagrana en cuestión.
b) Determine la función de transferencia del reactor.
45

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
60
80
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−270
−225
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.46: Diagrama de Bode
Solución
a) A baja frecuencia comienza en −900 y la pendiente es −20 dB/dc, por lo que se concluye que el sistema es detipo I.
ess Escalón Rampa ParábolaTipo I 0 1/Kv ∞
El valor de Kv se determina utilizando el diagrama de amplitud, tal como se muestra en la Fig. 1.47, de dondese puede leer el Kv utilizando los dos métodos planteados para ello, tal como sigue,
20logKv ≈ 30 ⇒ Kv = 31,62
ω1 = Kv ≈ 31
de allí que el error a la rampa será,
ess =131
= 0,032
46

1.8 Ejercicios Resueltos
Figure 1.47: Diagrama de Bode asintótico
b) Identificación de la función de transferencia
• Análisis a baja frecuencia
◦ Tal como se mencionó en el punto anterior, el sistema será de tipo I y su ganancia será K = Kv = 31.
• Análisis a alta frecuencia
◦ El diagrama de magnitud la pendiente tiende a −60 dB/dc y la fase a −2700, por lo que se concluyeque m− n = 3, es decir, existirán tres polos más que ceros. Así mismo, la función de transferenciaes de fase mínima.
• Análisis a frecuencias intermedias
◦ La fase comienza aumentando, lo que indica la presencia de un cero a baja frecuencia.
◦ Al seguir aumentando la frecuencia se observa una caída abrupta en la fase y un sobreimpluso enla amplitud, prueba inequívoca de un par de polos conjugados.
◦ Posteriormente, la fase solamente decae, lo que indica que solamente existirán polos. A partir deallí, y tomando en cuenta que m−n = 3, se concluye que luego de los polos conjugados existirá unpolo adicional.
Tomando en cuenta lo anterior se puede concluir que la forma de la función de transferencia podría ser comola expresada por la Ec. 1.66, de la cual solo hay que comprobar la frecuencia de ocurrencia de los polos. Elloes posible dibujando las aproximaciones asintóticas sobre el diagrama de amplitud, tal como se muestra en laFig. 1.43. A partir de allí, se identifican las frecuencias de ocurrencia de los factores y el valor del Mr(dB),para poder finalmente aproximar la función de transferencia tal como lo expresa la Ec. 1.48.
G(s) =K (τ1s+1)
s[(
1ωn
)s2 +
(2ζ
ωn
)s+1
](τ2s+1)
(1.66)
20logMr = 10 dB ⇒ Mr =1
2ζ√
1−ζ 2= 3,16 ⇒ ζ = 0,16
G(s) =31[(
10,95
)s+1
]s[( 1
16
)s2 +0,08s+1
]( 150 s+1
) (1.67)
47

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
−100
−80
−60
−40
−20
0
20
40
60
80
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−270
−225
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Termina en −270
Creciente
w3
w1 w2 − 60 dB/dc
0 dB/dc − 20 dB/dc 20 log Mr = 10 dB
− 40 dB/dc
Decreciente
Comienza en − 90
Figure 1.48: Diagrama de Bode Asíntótico
1.9. Ejercicios Propuestos
Ejercicio propuesto 1.1 Realice un esbozo del diagrama de Bode y del diagrama polar, para las siguientesfunciones de transferencia.
a) G(s) = 10(s+50)s(s+2)2(s+100)
b) G(s) = 3000(s+3)(s+10)s(s+0,1)(s2+2s+625)
c) G(s) = 100(s+0,1)(s+30)(5−s)(s+100)
d) G(s) = 20(s+50)2
s2(s−1)(s+150)
Ejercicio propuesto 1.2 Identifique las funciones de transferencia correspondientes a partir de los diagramasde Bode de las Figs. 1.49, 1.50, 1.51, 1.52 y 1.53.
48

1.9 Ejercicios Propuestos
10−1
100
101
102
103
104
−120
−100
−80
−60
−40
−20
0
20
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.49: Diagrama de Bode
10−1
100
101
102
103
104
−120
−100
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−1
100
101
102
103
104
−180
−157.5
−135
−112.5
−90
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.50: Diagrama de Bode
49

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
−20
0
20
40
60
80
100
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−180
−135
−90
−45
0
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.51: Diagrama de Bode
10−2
10−1
100
101
102
103
−20
0
20
40
60
80
100
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−200
−150
−100
−50
0
50
100
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.52: Diagrama de Bode
50

1.9 Ejercicios Propuestos
10−2
10−1
100
101
102
103
−80
−60
−40
−20
0
20
40
60
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−160
−140
−120
−100
−80
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.53: Diagrama de Bode
Ejercicio propuesto 1.3 Considere que los diagramas de Bode propuestos en los ejercicios 1.2 y 1.1 represen-tan, para un sistema de control de retroalimentación simple, la respuesta frecuencial del sistema a lazo abierto.Utilizando dichos diagramas, calcule lo siguiente:
a) Los coeficientes de error de dichos sistemas ante diferentes entradas (escalón, rampa y parábola), utilizandopara ello la información proveniente de los Diagramas de Bode (no utilize las funciones de transferencia).
b) El ancho de banda.
Ejercicio propuesto 1.4 La respuesta frecuencial a lazo abierto de un esquema de control de un reactor quí-mico corresponde con el diagrama de Bode que se muestra en la Fig. 1.54. A partir de allí, se desea obtener lasiguiente información respecto al comportamiento del sistema a lazo cerrado:
a) Determine, tanto el error al escalón, rampa y parábola, como el ancho de banda. Para lo cual solamentedebe basarse en información obtenida del diagrama de Bode.
b) Si al sistema original se le añade a lazo abierto una función de transferencia Ga(s) = (T s+ 1), escojaun valor para T entre los valores de T1 = 10 y T2 = 0,1, tal que proporcione una mejor respuesta temporal(transitoria y permanente). Su escogencia debe fundamentarse en los diagrama de Bode modificados, según elfactor añadido.
c) Si al sistema original se le añade a lazo abierto una función de transferencia Ga(s) = (T s+ 1)−1, escojaun valor para T entre los valores de T1 = 10 y T2 = 0,1, tal que proporcione una mejor respuesta temporal(transitoria y permanente). Su escogencia debe fundamentarse en los diagrama de Bode modificados, según elfactor añadido.
51

1 Respuesta Frecuencial
10−2
10−1
100
101
102
103
−160−140−120−100
−80−60−40−20
0204060
Mag
nitu
d (d
B)
10−2
10−1
100
101
102
103
−300
−250
−200
−150
−100
Fase
(gr
ados
)
Frecuencia (r/s)
Figure 1.54: Diagrama de Bode
52