9T3
57
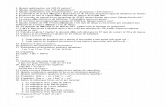
Dpto. Tecnología Electrónica EC 10/March/09 Manuel Valencia EC: Sistemas digitales a nivel RT REALIZACIÓN DE SISTEMAS DIGITALES A NIVEL RT Contenido: D Diseño de sistemas digitales: organización Datos&Control; macro y micro-opera- ciones; componentes; lenguaje RT; interconexión vía buses; realización de la unidad de datos. Un ejemplo: calculadora; desarrollo de la calculadora a nivel RT. D Descripción con cartas ASM: la construcción de cartas ASM; la carta de datos y la de control. D Diseño de la unidad de control: mediante un biestable por estado. Control microprogramado. D El uso de la calculadora. Bibliografía básica ** C. Baena, I. Gómez, J.I. Escudero, M. Valencia: “Sistemas Digitales”. Servicio de publicaciones del Dpto. Tecnología Electrónica, 1997. Cap. 1 y 2 ** C. Baena, M.J. Bellido, A. J. Molina, M.P. Parra, M. Valencia: “Problemas de Circuitos y Sistemas Digi- tales”. Ed. McGraw-Hill Interamericana, 1997. Caps 11 y 12.
-
Upload
stiva-darcy -
Category
Documents
-
view
14 -
download
3
description
cartas asm
Transcript of 9T3

Dpto. Tecnología Electrónica EC 10/March/09
Man
uel V
alen
cia
EC: Sistemas digitales a nivel RT
REALIZACIÓN DE SISTEMAS DIGITALES A NIVEL RTContenido:
Diseño de sistemas digitales: organización Datos&Control; macro y micro-opera-ciones; componentes; lenguaje RT; interconexión vía buses; realización de la unidad de datos. Un ejemplo: calculadora; desarrollo de la calculadora a nivel RT.
Descripción con cartas ASM: la construcción de cartas ASM; la carta de datos y la de control.
Diseño de la unidad de control: mediante un biestable por estado. Control microprogramado.
El uso de la calculadora.
Bibliografía básica
** C. Baena, I. Gómez, J.I. Escudero, M. Valencia: “Sistemas Digitales”. Servicio de publicaciones del Dpto. Tecnología Electrónica, 1997. Cap. 1 y 2
** C. Baena, M.J. Bellido, A. J. Molina, M.P. Parra, M. Valencia: “Problemas de Circuitos y Sistemas Digi-tales”. Ed. McGraw-Hill Interamericana, 1997. Caps 11 y 12.

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 2
NIVEL RT: DATOS Y CONTROL
CIRCUITOS VERSUS SISTEMAS
Máquina de estados finitos Instrucciones: OperacionesFuncionalidad
0, 1
Líneas (cables)
De conmutación
Combinacional yalmacenamiento (memoria)
Información
Conexión
Nivel/Lenguaje
Organización
Palabras de datos
Buses
RT (Register Transfer)
Procesado de datos y control
CIRCUITOS SISTEMAS
Puertas y biestablesComponentes MUX, ALU, ..., registros, ...
CircuitoCombinacional
z1zk
x1
xn
y1
yr
reloj
B1
Br
Unidad de Control
Unidad deProcesado
XIN
X Z
ZOUT
DIN DOUT
X : cualificadores o entradas de controlZ : comandos o salidas de controlD: datos
reloj

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 3
NIVEL RT: DATOS Y CONTROL
MACRO Y MICRO OPERACIONES
∗ Macro-operación: También llamada instrucción
• Es cada tarea que especifica previamente el usuario y que el sistema realizaautomáticamente
• En general el sistema tarda varios ciclos de reloj en su ejecución.
∗ Micro-operación o μop:
• Es cada tarea que el sistema realiza en un único ciclo de reloj
• En general consiste en una o varias transferencias entre registros (RT).
∗ Cuestiones de interés general:
• • • La forma de diseñar los Sistemas Digitales• • • Las formas de describir los Sistemas Digitales

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 4
NIVEL RT: DATOS Y CONTROL
METODOLOGÍA DE DISEÑO EN EL NIVEL RT (Top Down)
0/ Punto de partida: Descripción funcional a través del ISP
1/ Diseñar la Unidad/Ruta de DatosProceso en varios pasos: Se establece una arquitectura básica, se desarrollan las operaciones/instrucciones a nivel de micropoeraciones y se modifica la arquitectura básica de la unidad/ruta de datos
2/ Describir formalmente el comportamiento de datos y de control mediante un algoritmo (algoritmo del flujo de datos y de control)
3/ Diseñar la Unidad de Control

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 5
NIVEL RT: DATOS Y CONTROL
FORMAS DE DESCRIPCIÓN
UTILIDAD: En el proceso de diseño Como documentación
QUÉ DESCRIBIREstructura de la Unidad de Datos
Componentes secuenciales (registros), llamados también de memoriaComponentes combinacionales, llamados también unidades funcionales orecursos de cálculoComponentes de conexión (buses)
Microprograma de controlEstructura del controlador
FORMAS DE DESCRIPCIÓN:Gráficas
Orientadas al nivel estructural: dibujos/diagramas de circuitosOrientadas al nivel funcional: cartas ASM (Algorithmic State Machine)
HDL: Hardware Description Language

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 6
NIVEL RT: DATOS Y CONTROL
EJEMPLO DE SISTEMA DIGITAL
• Especificación inicial:
CALCULADORA DE SUMAS Y RESTAS: Cualquier posibilidad de suma o resta entre dos datos, A y B, y de almacenar el resultado en el registro que ocupaba uno de ellos
• Conjunto de instrucciones (ISP: Instruction Set Processor). Hay 8, que son:
• A ← A + B • B ← A + B • A ← A - B • B ← A - B• A ← -A + B • B ← -A + B • A ← -A - B • B ← -A - B
CONTROL A
B
U. PROCESADO
Z
IR[3]
XS
Usuario Sistema
FIN• Organización del sistema

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 7
NIVEL RT: DATOS Y CONTROL
• Modo de operación de calculadora
EL USUARIO:
Especifica en IR (Instruction Register) una de las ocho instrucciones.
Suministra la señal de comienzo XS.
EL SISTEMA:
Ejecuta la instrucción especificada.
Genera señal "FIN" y espera nueva XS.

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 8
NIVEL RT: DATOS Y CONTROL
NOTACIÓN RT. TIPOS DE OPERACIÓN
Operación Notación RT
Carga en paralelo Α ← DINDesplazamiento a dcha. An-1 ← Dr , Ai ← Ai+1 ∀i≠n-1 ; A ← ShR(A,Dr)Desplazamiento a izda. A0 ← Dl , Ai ← Ai-1 ∀i≠0 ; A ← ShL(A,Dl)Incremento (Decremento) A ← A+1 (A ← A-1)Puesta a 0 (ó a 1) A ← 0 (A ← 1...1)Inhibición (NOP) A ← A
De escritura
Operación Señal de control
Carga en paralelo W (T, L)Desplazamiento a dcha. / izda. SR / SLIncrementa / Decrementa I / DPuesta a 0 / 1 CL (Z) / SInhibición Ninguna activaLectura R
De controlIncondicional: Condicional
Dout = A R = 1 : Dout = AR = 0 : Dout = HI
Las operaciones de lectura pueden afectar a:
Todo el dato: Dout = AParte del dato: Outa = A3Una función del dato: Cero ={ 0 si A≠0
1 si A=0
De lectura

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 9
NIVEL RT: DATOS Y CONTROL
IMPLICACIÓN DE DATOS EN TRANSFERENCIA ENTRE REGISTROS
COMPONENTES DE MEMORIA: UD: Registros A, B C
Funciones: Escritura en A y Lectura de B yC
COMPONENTES COMBINACIONALES: Para implementar funciones:
En UD: el procesado de datos G(B, C, ...)En UC: la condición de control, f(x)
COMPONENTES DE CONEXIÓN: Caminos físicos y lógicos para el flujo de datos desde cada registro fuente al de destino:
• Líneas de conexión (buses)• Circuitos combinacionales
ADEMÁS, LA UC:Establece la secuencia de μOpsGenera las señales de control en UD
Operación RTf(x): A ← G(B, C, ...)
Condición de ejecución

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 10
NIVEL RT: DATOS Y CONTROL
Descripción estructural del Sistema digital
• Evalúa f(x)
• Genera señales de control
• Establece secuencia de RT
CircuitoCombinacional
que realiza
G(B, C, ...)
Δ
Δ
Δ
•
∇
CK
RB
WA
x
CONTROL DATOS
B
C
A
R
W
• • •

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 11
NIVEL RT: DATOS Y CONTROL
Operación temporal 1
• Evalúa f(x)
• Genera señales de control
• Establece secuencia de RT
CircuitoCombinacional
que realiza G(B, C, ...)
Δ
Δ
Δ
•
∇
CK
RB
WA
x
CONTROL DATOS
B
C
A
R
W
• • •
Ciclo K
Inicialmente los datos son: A0, B0 y C0
Suponemos f(x) = 1
Ck:
RB:
Sal B: Sal G:
A:
f(x): A ← G(B, C, ...)
G(B0, C0, ...)
HI HIB0G(B0, C0, ...)???
A0???
C0
WA:
ciclo K ciclo K+1ciclo K-1

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 12
NIVEL RT: DATOS Y CONTROL
Operación temporal 2
• Evalúa f(x)
• Genera señales de control
• Establece secuencia de RT
CircuitoCombinacional
que realiza G(B, C, ...)
Δ
Δ
Δ
•
∇
CK
RB
WA
x
CONTROL DATOS
B
C
A
R
W
• • •
Ciclo K
Inicialmente los datos son: A0, B0 y C0
Suponemos f(x) cambia
Ck:
RB:
Sal B: Sal G:
A:
f(x): A ← G(B, C, ...)
G(B0, C0, ...)
HI HI???A0
???
C0
WA:
f(x):
B0G(B0, C0, ...)

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 13
NIVEL RT: DATOS Y CONTROL
METODOLOGÍA DE DISEÑO EN EL NIVEL RT (Top Down)
Tras elegir el ISP del Sistema Digital:
1/ Diseñar la Unidad/Ruta de Datos (Data Path)Proceso en varios pasos:
Tratemos en primer lugar las interconexiones.
Bloque de
Registros
Interconexión
UnidadesFuncionales
Entradas Salidas
∗ Se establece una arquitec-tura básica,
∗ se desarrollan las opera-ciones/instrucciones a nivel de micropoera-ciones, y
∗ se modifica la arquitec-tura básica de la unidad/ruta de datos

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 14
NIVEL RT: DATOS Y CONTROL
INTERCONEXIÓN VÍA BUSES
B0B1
Bn-1
n
n
B[n] = B0:n-1{BUSB[n] = B0:n-1
• Bus: Conjunto de “n líneas” conductoras con un protocolo para su manejo
• Tipos de Buses
Estándar (0, 1)Unidireccional
Fuente Destino
Fu / De De / Fu
Bidireccional
Dedicados
Compartidos 3-state (0, 1, HI)
Salidaestándar
Buffer3-state

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 15
NIVEL RT: DATOS Y CONTROL
LECTURA DE BUS (con Escritura en Registro)A ← Bus = Dato
Único bus: Uno entre varios buses (p. ej. 4):Conexión directa Conexión multiplexada
WA = 1
A
DatoBus
Ej.: Dato = 1011Bus
WA = 1
A012
3
Bus 0Bus 1Bus 2
1
11
0
Bus 3
S1S0
00
1 1 2 3
WA = 1
A
Dato
10

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 16
NIVEL RT: DATOS Y CONTROL
ESCRITURA DE BUS (con Lectura en Registro) Bus = [A]
Sólo hay un registro fuente: la salida del registro puedeser estándar o 3-state
Hay varios registros fuente: deben ser 3-state
Bus único
A
Varios Buses
A
A3 A2 A1R1R2R3
Como máximo, una señal Rj activaP. ej. R1R2R3 = 0 1 0 para
Bus = [A2]
Recordad: las salidas bidireccionales(in/out) conllevan el carácter 3-state
0 01

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 17
NIVEL RT: DATOS Y CONTROL
EJEMPLO:
• Se dispone de 4 registros [n], A3, A2, A1, A0, con carga en paralelo (W3, W2, W1, W0)• Hay que realizar la conexión para la trasnferencia AF → AD, con F, D ∈ {0, 1, 2, 3}• La selección de Fuente está dada por F1F0 y la de Destino, por D1D0.
A3W
A2W
A1W
A0W
D1
D0
DEC2 : 4 3
2100
1
Ejemplo, AD = A1 (D=1)D1D0 = 0 1
01
000
1
Solución del Destino:
[AF]
Hay que garantizar [AF] en las entradas paralelo de AD = A1

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 18
NIVEL RT: DATOS Y CONTROL
CASO 1: Registros con entrada y salida separadas
1/ Con salida estándar Solución Multiplexada
A3W
n
A2W
n
A1W
n
A0W
n
D1
D0
DEC2 : 4 3
2100
101
0 0 01
F1F0 n x MUX 4 : 1
10
3210
AF = A3; F1F0 = 1 1
11
[A3]
Ejemplo, A3 → A1AD = A1

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 19
NIVEL RT: DATOS Y CONTROL
CASO 2: Registros con entrada y salida separadas
2/ Con salida 3-state Solución Bus (HI)
A3W
n
A2W
n
A1W
n
A0W
n
D1
D0
DEC2 : 4 3
2100
101
0 0 01
Ejemplo, A3 → A1
F1
F0
DEC2 : 4
3210
1
0
R R R R∇ ∇ ∇ ∇
11 1
000
[A3]

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 20
NIVEL RT: DATOS Y CONTROL
CASO 3: Registros con terminales de entrada/salida
Terminal bidireccional Solución Bus (HI)
A3W
A2W
A1W
A0W
D1
D0
DEC2 : 4 3
2100
101
0 0 01
Ejemplo, A3 → A1
F1
F0
DEC2 : 4
3210
1
0
R R R R∇ ∇ ∇ ∇
11
100 0

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 21
NIVEL RT: DATOS Y CONTROL
DISEÑO DE Data Path
• El Data Path tiene que poder ejecutar todas las μops • La organización del Data Path puede ser de propósito:
∗ Específico: Para una tarea concreta (p. ej. sumador serie de pág. siguiente)∗ General: Para muchas tareas (p. ej. el computador simple que diseñaremos)
• Estructura: nos centramos en Data Path síncronos disparados por flanco.
Bloque de
Reg RegReg Reg
Interconexión
UnidadFuncional
UnidadFuncional
Entradas Salidas COMPONENTES

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 22
NIVEL RT: DATOS Y CONTROL
REGISTROS VISIBLES POR EL USUARIO
• Registros visibles por el usuario: Aquéllos que aparecen en la descripción de las macrooperaciones (instrucciones)
• Los registros visibles son los únicos que el usuario necesita conocer.
• Registros visibles de la calculadora (pág. 6): A y B.
• Cuando se ejecuta una macrooperación no debe modificarse el contenido de ningún registro visible, a no ser que dicho registro aparezca como destino en una transferencia de la descripción de la macrooperación.
• Puede modificarse el contenido de cualquier registro no visible.

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 23
NIVEL RT: DATOS Y CONTROL
DATA PATH ESPECÍFICO: EJ. SUMADOR SERIE
xrWASRA 0DA[n]
Pin
ai biCiCi+1 FA
si
xrWBSRB 0DB[n]
Pin
xrSRS SUM[n]
inq
CNT mod. nCLUP
Cy
Din [n]
CD
WD
Control Unit
Data Path
Start End
Cy WA WB CL SRA SRB UP CD W SRS

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 24
NIVEL RT: DATOS Y CONTROL
ORGANIZACIONES GENÉRICAS BASADAS EN ALU:1. BUS SIMPLE
Ck R1 Ck R2 Ck Rk
. . .
Ck ACC
ALU
RTCk
Sumar R1 con R2 en Rk requiere varias μops:1 RT ← R12 ACC ← RT + R23 Rk ← ACC

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 25
NIVEL RT: DATOS Y CONTROL
2. DOBLE BUS
RT
ALU
B1
B2
Ck R1 Ck R2 Ck Rk
Ck
. . .
Sumar R1 con R2 en Rk requiere varias μops, pero menos:1 RT ← R12 Rk ← RT + R2

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 26
NIVEL RT: DATOS Y CONTROL
3. TRIPLE BUS
Sumar R1 con R2 en Rk requiere sólo 1 μop:Rk ← R1 + R2
ALU
Ck R1 Ck R2 Ck Rk

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 27
NIVEL RT: DATOS Y CONTROL
METODOLOGÍA DE DISEÑO EN EL NIVEL RT (Top Down)
1/ Diseñar la Unidad/Ruta de Datos (Data Path)∗ Elección de una arquitectura básica
∗ Desarrollo de cada macro-operación en una secuencia de micro-operaciones (μOp):• Instrucción o macro-operación: Ejecución en varios ciclos de Clk• Micro-operación: Una o más primitivas RT que se ejecutan en solo ciclo de Clk
∗ Cambios en la arquitectura básica de la unidad de datos para que ejecute todas las micro-operaciones.
Nivel ISP Nivel RTμOp RT1
Instrucción K μOp RT2
μOp RTN···
Cada macro-operación Secuencia de micro-operaciones
Este paso afecta y dependede la Unidad de Datos

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 28
NIVEL RT: DATOS Y CONTROL
DISEÑO DE LA CALCULADORA
a b
a±b
ACΔ
T
ΔWT
A
ZACWACRAC
WARA
Δ BWBRB
sr
[AC]
DBTodo de n bits
UNIDAD DE PROCESADO
WT sWB RAC WACrWA RBRA ZAC
(del controlador)
Descripción de componentes
Ejemplo: Registro A (B)
Δ AWARAV
Estructural
Funcional
RA WA A ← V =
0 0 A ← A V = HI
0 1 A ← V V = DIN
1 0 A ← A V = [A]
1 1 Prohibida

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 29
NIVEL RT: DATOS Y CONTROL
INSTRUCCIONES → SECUENCIA DE MOPS
Α←Α+Β Β←Α+Β Α←Α−Β Β←Α−Β
ΑC←0, Τ←Α
ΑC←AC+T ΑC←AC-T
Α←ΑC Β←ΑC Α←ΑC Β←ΑC
μOP
T0
T1
T2
T3
Τ←B , ΑC←AC+T
Α←(−Α)+Β Β←(−Α)+Β Α←(−Α)−Β Β←(−Α)−Β
ΑC←0, Τ←Α
ΑC←AC+T ΑC←AC-T
Α←ΑC Β←ΑC Α←ΑC Β←ΑC
μOP
T0
T1
T2
T3
Τ←B , ΑC←AC-T

Dpto. Tecnología Electrónica EC Nivel RT Datos y Control - 30
NIVEL RT: DATOS Y CONTROL
TAREAS PENDIENTES
Realizar los siguientes pasos de la Metodología de diseño, que son:
2/ Describir formalmente el comportamiento de datos y de control mediante un algoritmo (algoritmo del flujo de datos y de control)
3/ Diseñar la Unidad de Control

Dpto. Tecnología Electrónica EC 19/February/09
Man
uel V
alen
cia
EC: Sistemas digitales a nivel RT
REALIZACIÓN DE SISTEMAS DIGITALES A NIVEL RTContenido:
Diseño de sistemas digitales: organización Datos&Control; macro y micro-operaciones; componentes; lenguaje RT; interconexión vía buses; realización de la unidad de datos. Un ejemplo: calculadora; desarrollo de la calcu-ladora a nivel RT.
Descripción con cartas ASM: la construcción de cartas ASM; la carta de datos y la de control.
Diseño de la unidad de control: mediante un biestable por estado.
El uso de la calculadora.
Bibliografía básica
** C. Baena, I. Gómez, J.I. Escudero, M. Valencia: “Sistemas Digitales”. Servicio de publicaciones del Dpto. Tecnología Electrónica, 1997. Cap. 1 y 2
** C. Baena, M.J. Bellido, A. J. Molina, M.P. Parra, M. Valencia: “Problemas de Circuitos y Sistemas Digi-tales”. Ed. McGraw-Hill Interamericana, 1997. Caps 11 y 12.

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 2
CARTAS ASM
CARTA ASM: DEFINICIONES
Caja de EstadoCaja de Decisión
Caja de Acción Condicional
Símbolode estado
Camino deentrada
Caminode salida
Accionesbbb Código binario
S CondiciónSí No
Caminode salida
Caminode salida
Camino de entrada
Acciones
Camino de entrada
Camino de salidaUniones de caminos:

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 3
CARTAS ASM
Bloque ASM
. . . . . . . . .
. . .
Un camino de entrada
Una y sólo una
caja de estados
Número variable
de acción condicional
de cajas de decisión o
Número variable de caminos de salida
Carta ASM
Grafo orientadoy cerrado
que interconectabloques ASM

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 4
CARTAS ASMContador ascendente mód. 8
Binario(G=0)/Gray(G=1)
G
G
G
G
G
G
z0
z1
z1 z0
z2
z2 z0
z1z2
z2 z1 z0
1
0
1
0
0
1
0
1
1
0
0
1
Moore

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 5
CARTAS ASMContador ascendente mód. 8
Binario(G=0)/Gray(G=1)
G
G
G
G
G
G
z0
z1
z1 z0
z2
z2 z0
z1z2
z2 z1 z0
1
0
1
0
0
1
0
1
1
0
0
1
Moore
G
z1
10
z0
z0
z1
z2
Mealy
G0 1
z0
G10
z1
z2 z0
G10
z1
z2
G10
z0z1
z2
G
z1 z0
10

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 6
CARTAS ASM
Máquina expendedora
s1A
CK
s0
R
C
s1 s0 Moneda
0 0 Ninguna0 1 11 0 21 1 5
ESPECIFICACIÓN
• Producto de valor 4 €.
• Admite billete de 5 y monedas de 2 y 1 €.
• Con 5 € da cambio (para ello, activa C=1).
• Se accede al producto (para ello, activa A=1).
• R causa directamente el retorno de las mone-das (el controlador no tiene que activar C).
Rs1s0
0 1
C, A5 11 00
01102 1
R R 1
s1s0s1s0
1
0 000 000110
01 10
3
R 10
s1s0= 00≠ 00
4A
Carta ASM

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 7
CARTAS ASM
Errores comunes en la construcción de cartas ASM
Próximo estado
Cartas con error
A
B C
x y
A
B C D
0 1 0 1
sin determinar
x
A
B
01
Cerrar lazos sincajas de estado
x
A
B
01
x
A
10
y 01
x 10
B
x⋅y
A
0 1
x+y
B
01
No garantizar la posibilidad lógicade todos los caminos

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 8
CARTAS ASM
Consideraciones temporales
A
M N
XRAWMWN
CK
RA
WM WN
•
•
DATOS∇C
ON
TR
OL
SISTEMA OPERACIÓN ASM: Datos y Control
X
SK
0 1
N←A
M←Α
SK+1. . . .
X
SK
0 1
WN
RA,WM
SK+1. . . .
SKSK-1 SK+1
CkSX
RA
WM
WN
[M]
[N]
M0 A0M0
N0 N0 A0
[A] = A0
FORMAS DE ONDA

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 9
CARTAS ASM
Inicio y Fin de operación
XS
Carta ASM del ejemplo
FINSF
0
1
S0 NOP
Puede ser unestado útil o unaacción condicional

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 10
CARTAS ASM
Carta ASM de la Calculadora: de Datos
IR210
Xs0
1
IR110
IR010
ΑC←0, Τ←Α
Τ←B
ΑC←AC+T
S0
S1
S2
S3
S4
SF
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101
IR2:0 μOP0 0 00 0 10 1 00 1 11 0 01 0 11 1 01 1 1
A ← A+BΒ ← A+BA ← A -BΒ ← A -BA ← -A+BΒ ← -A+BA ← -A -BΒ ← -A -B
Α← Α+Β Β←Α+Β Α←Α−Β Β←Α−Β
ΑC←0, Τ←Α
ΑC←AC+T ΑC←AC-T
Α←ΑC Β←ΑC Α←ΑC Β←ΑC
μOP
1
2
3
4
Τ←B , ΑC←AC+T
Si es AoB ← - A+B, en μOP 2 se hará ΑC←AC-T
ΑC←AC-T
ΑC←AC+T ΑC←AC-T
Β←ΑCΑ←ΑC

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 11
CARTAS ASM
Carta ASM de la Calculadora: de Control
IR210
Xs0
1
IR110
IR010
ZAC, WT, RA
WAC, WT, RB
s r
s r
WA WB
S0
S1
S2
S3
S4
SF
WAC
RAC
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101
IR210
Xs0
1
IR110
IR010
ΑC←0, Τ←Α
Τ←B
ΑC←AC+T
S0
S1
S2
S3
S4
SF
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101
ΑC←AC-T
ΑC←AC+T ΑC←AC-T
Β←ΑCΑ←ΑC
FIN

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 12
CARTAS ASM
HDL básico (FSMD:Finite State Machine with Data path)FORMATO GENERAL:
CASOS PARTICULARES:
N fi(x) Ti/zi [N+1] Puede eliminarse la próxima μOP si es N+1
N t NOP Nk Sin condición es “t” (true); sin acción es NOP
N f(x) T0/z0 N0 Puede ponerse N IF f(x) THEN T0/z0 goto N0f(x) T1/z1 N1 ELSE T1/z1 goto N1
N t NOP Nk Puede ponerse N goto Nk
N f0(x) T0/z0 N0 f1(x) T1/z1 N1 ... ... ...fk(x) Tk/zk Nk
μop actual próxima μop
condicionesAcciones

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 13
CARTAS ASM
RELACIÓN ENTRE CARTAS ASM Y HDL
4M
N P
5 6
x
4 x M/P 6
1 0
x M/N
Tipo Moore
Tipo Mealy

Dpto. Tecnología Electrónica EC Nivel RT Cartas ASM - 14
CARTAS ASM
HDL de la Calculadora
000 Xs - 000
Xs - 001
001 t ZAC/WT/RA 010
010 IR2 WT/RB/WAC/s 011
IR2 WT/RB/WAC/r 011
011 IR1 WAC/s 100
IR1 WAC/r 100
100 IR0 RAC/WA 101
IR0 RAC/WB 101
101 t FIN 000
IR210
Xs0
1
IR110
IR010
ZAC, WT, RA
WAC, WT, RB
s r
s r
WA WB
S0
S1
S2
S3
S4
SF
WAC
RAC
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101 FIN

Dpto. Tecnología Electrónica EC Sistemas Digitales a nivel RT 19/2/09
Man
uel V
alen
cia
REALIZACIÓN DE SISTEMAS DIGITALES A NIVEL RTContenido:
Diseño de una calculadora: organización Datos&Control; macro y micro-operaciones; componentes; len-guaje RT; interconexión vía buses; realización de la unidad de datos; desarrollo de la calculadora a nivel RT.
Descripción con cartas ASM: la construcción de cartas ASM; la carta de datos y la de control.
Diseño de la unidad de control: mediante un biestable por estado. El uso de la calculadora.
Bibliografía básica
** C. Baena, I. Gómez, J.I. Escudero, M. Valencia: “Sistemas Digitales”. Servicio de publicaciones del Dpto. Tecnología Electrónica, 1997. Cap. 1 y 2
** C. Baena, M.J. Bellido, A. J. Molina, M.P. Parra, M. Valencia: “Problemas de Circuitos y Sistemas Digita-les”. Ed. McGraw-Hill Interamericana, 1997. Caps 11 y 12.

Dpto. Tecnología Electrónica EC Unidad de Control - 2
UNIDAD DE CONTROL
Generalidades
∗ Objetivo: Diseñar la Unidad de control
∗∗ El punto de partida es el microprograma, bien como carta ASM, bien en HDL
∗∗ Nuestro interés: automatizar proceso de diseño y lograr buen circuito.
∗ Técnicas:
∗∗ CSS estándar, con biestables y puertas (Random logic): Proceso clásico para CSS
∗∗ Con 1 biestable por estado
∗∗ Control Microprogramado en ROM o PLA (firmware)
∗ Comparación:Técnica Proceso diseño Prestaciones Repetibilidad
CSS estándar Complejo Muy buenas Compleja1 biestable por estado Muy sencillo Buenas, pero mejorables Algo complejaFirmware Sencillo Regulares Fácil

Dpto. Tecnología Electrónica EC Unidad de Control - 3
UNIDAD DE CONTROL
Calculadora: Carta ASM y HDL HDL DE LA CALCULADORA
000 Xs - 000
Xs - 001
001 t ZAC/WT/RA 010
010 IR2 WT/RB/WAC/s 011
IR2 WT/RB/WAC/r 011
011 IR1 WAC/s 100
IR1 WAC/r 100
100 IR0 RAC/WA 101
IR0 RAC/WB 101
101 t FIN 000
IR210
Xs0
1
IR110
IR010
ZAC, WT, RA
WAC, WT, RB
s r
s r
WA WB
S0
S1
S2
S3
S4
SF
WAC
RAC
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101
CARTA ASM DE LA CALCULADORA

Dpto. Tecnología Electrónica EC Unidad de Control - 4
UNIDAD DE CONTROL
1 biestable por estado
∗ Los estados tienen codificación one-hot, salvo el de espera que tiene código 00...0:μop q1q2q3q4...1 1 0 0 0...2 0 1 0 0...3 0 0 1 0...4 0 0 0 1...
∗ Una visión intuitiva: con xS se introduce un 1 en el biestable de μop1 y ese 1 va circu-lando conforme se pasa de una μop a otra∗ Se puede automatizar el paso desde carta ASM al circuito
m
v
Sk
D
q
Clk
vm
m
KB
v0x
v1
0 1
x
mv0
v1
m0 m1
v
>1v
m0
m1
m1
Bmp
m
v
SkB
>1qk
mp
ASM
Circuito

Dpto. Tecnología Electrónica EC Unidad de Control - 5
UNIDAD DE CONTROL
IR210
Xs0
1
IR110
IR010
ZAC, WT, RA
WAC, WT, RB
s r
s r
WA WB
S0
S1
S2
S3
S4
SF
WAC
RAC
q5-q1=0...0
q1=1
q2=1
q3=1
q4=1
q5=1
CARTA ASM DE LA CALCULADORA CONTROL CON 1 BIESTABLE POR ESTADO
D q1
D q2
D q3
D q4
D qF(5)
Xs
RA ZAC
IR2
0
1
r s IR1
0
1
r s
WT WT
>1 WT
FIN
IR0
0
1
WBWA
RB
>1 WAC
WACWAC
>1r
>1s
RAC
FIN
Clk

Dpto. Tecnología Electrónica EC Unidad de Control - 6
UNIDAD DE CONTROL
Control microprogramado (firmware)
N f0(x) T0/z0 N0 f1(x) T1/z1 N1 ... ... ...fk(x) Tk/zk Nk
Instrucción genérica en HDL
ROM/PLA
Ent
rada
s
Salidas
Próxima Salidasde controlμop
x
N = [Reg]: actual μop
N+
Reg
Reg: Registro de carga en paralelo
Comandos
Nk zk
Unidad de control
Cualificadores
El valor de N y fk(x)dan la dirección deentrada en cuya palabra
están escritas Nk y zk

Dpto. Tecnología Electrónica EC Unidad de Control - 7
UNIDAD DE CONTROL
IR210
Xs0
1
IR110
IR010
ZAC, WT, RA
WAC, WT, RB
s r
s r
WA WB
S0
S1
S2
S3
S4
SF
WAC
RAC
q2q1q0=000
q2q1q0=001
q2q1q0=010
q2q1q0=011
q2q1q0=100
q2q1q0=101
CARTA ASM DE LA CALCULADORA CONTROL CON PLA
q2q1q0 Q2Q1Q0 Término P Salidas afectadas
000 Xs NOP 000
Xs NOP 001 Xsq2q1q0 Q0
001 t ZAC/WT/RA 010 q2q1q0 Q1, ZAC/WT/RA
010 IR2 WT/RB/WAC/s 011 IR2q2q1q0 Q1Q0, WT/RB/WAC/s
IR2 WT/RB/WAC/r 011 IR2q2q1q0 Q1Q0, WT/RB/WAC/r
011 IR1 WAC/s 100 IR1q2q1q0 Q2, WAC/s
IR1 WAC/r 100 IR1q2q1q0 Q2, WAC/r
100 IR0 RAC/WA 101 IR0q2q1q0 Q2Q0, RAC/WA
IR0 RAC/WB 101 IR0q2q1q0 Q2Q0, RAC/WB
101 t FIN 000 q2q1q0 FIN

Dpto. Tecnología Electrónica EC Unidad de Control - 8
UNIDAD DE CONTROL
PERSONALIZACIÓN DEL PLA
Términos P Salidas afectadas (D=Q)
Xsq2q1q0 Q0
q2q1q0 Q1, ZAC/WT/RA
IR2q2q1q0 Q1Q0, WT/RB/WAC/s
IR2q2q1q0 Q1Q0, WT/RB/WAC/r
IR1q2q1q0 Q2, WAC/s
IR1q2q1q0 Q2, WAC/r
IR0q2q1q0 Q2Q0, RAC/WA
IR0q2q1q0 Q2Q0, RAC/WB
q2q1q0 FIN
Xs
D q0
D q1
D q2IR2
IR1
IR0
q2
q1 q0
ZACWTRARBWACsrRACWAFIN WB
Plano AND Plano OR
Xsq2q1q0
q2q1q0
IR2q2q1q0
IR2q2q1q0
IR1q2q1q0
IR1q2q1q0
IR0q2q1q0
IR0q2q1q0
q2q1q0
Clk

Dpto. Tecnología Electrónica EC Unidad de Control - 9
UNIDAD DE CONTROL
DISEÑO CON ROM
A2A1A0 A3 Salidas D2D1D0
q2q1q0 E Salidas Q2Q1Q0
000 Xs - 000
Xs - 001
001 t ZAC/WT/RA 010
010 IR2 WT/RB/WAC/s 011
IR2 WT/RB/WAC/r 011
011 IR1 WAC/s 100
IR1 WAC/r 100
100 IR0 RAC/WA 101
IR0 RAC/WB 101
101 t FIN 000
D q0
D q1
D q2
Clk
6
012345
7
Xs
IR2IR1IR0
EROM 24x14
3210
Salidas [14]
{A3A2A1A0} {D2D1}{D0 ZAC WT RA} {RB WAC s r} {RAC WA WB FIN}
D2D1D0
ZACWTRARBWACsrRACWAWBFIN
Ejemplos de contenidos de la ROM:
0000 00 0000 0000 00001000 00 1000 0000 00000001 01 0111 0000 00001001 01 0111 0000 0000

Dpto. Tecnología Electrónica EC Unidad de Control - 10
UNIDAD DE CONTROL
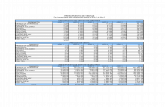
Contenidos de la ROM
$A={A3A2A1A0}
$H3={D2D1}$H2={D0 ZAC WT RA}$H1={RB WAC s r}$H0={RAC WA WB FIN}
$A $H3H2H1H0
0 0000
1 1700
2 1AE0
3 2060
4 280C
5 0001
6 (0000)
7 (0000)
8 0800
9 1700
A 1AD0
B 2050
C 280A
D 0001
E (0000)
F (0000)
(Ejemplos Anteriores)
(0000): No importa en este caso

Dpto. Tecnología Electrónica EC 19 / February / 09
Man
uel V
alen
cia
REALIZACIÓN DE SISTEMAS DIGITALES A NIVEL RTContenido:
Diseño de una calculadora: organización Datos&Control; macro y micro-operaciones; componentes; len-guaje RT; interconexión vía buses; realización de la unidad de datos; desarrollo de la calculadora a nivel RT.
Descripción con cartas ASM: la construcción de cartas ASM; la carta de datos y la de control.
Diseño de la unidad de control: mediante un biestable por estado.
El uso de la calculadora.
Bibliografía básica
** C. Baena, I. Gómez, J.I. Escudero, M. Valencia: “Sistemas Digitales”. Servicio de publicaciones del Dpto. Tecnología Electrónica, 1997. Cap. 1 y 2
** C. Baena, M.J. Bellido, A. J. Molina, M.P. Parra, M. Valencia: “Problemas de Circuitos y Sistemas Digi-tales”. Ed. McGraw-Hill Interamericana, 1997. Caps 11 y 12.
EC: Sistemas digitales a nivel RT

Dpto. Tecnología Electrónica EC Nivel RT Uso de la calculadora- 2
USO DE LA CALCULADORA
Problema a resolver con la Calculadora:
• Calcular 3A-B y poner el resultado en A
• Programa a ejecutar:
A0 B0
A BValores en A/B
Instrucción 1 : B ← A-B
Instrucción 2 : B ← A+B
Instrucción 3 : A ← A+B
A0 A0-B0
A0 2A0-B0
3A0-B0 2A0-B0
Valores iniciales:

Dpto. Tecnología Electrónica EC Nivel RT Uso de la calculadora- 3
USO DE LA CALCULADORA
• Funcionamiento ‘operativo’ de este sistema: Modo Calculadora
Problemas de funcionamiento del Modo Calculadora:
No hay programa almacenado ( , , )
Hay que generar la orden XS ( )
Solución a estos problemas en el Modo Computador de operación (Tema próximo)
“Alguien” pone IR=011 ( Β ← A - B )
“Alguien” da : XS
“Alguien” pone IR=001 ( Β ← A + B )
“Alguien” da: XS
“Alguien” pone IR=000 ( Α ← A + B )
“Alguien” da: XS
y espera a que se active FIN
y espera a que se active FIN
y espera a que se active FIN