Actividad 1-lara-garcía
18
UNIVERSIDAD AUTÓNOMA DE YUCATÁN FACULTAD DE INGENIERÍA ANÁLISIS VECTORIAL ACTIVIDAD 1 PARTE DIGITAL Nombre: Manuel Antonio Lara García Mtro. (a): Maritza de Coss Licenciatura: Ingeniería en Mecatrónica
-
Upload
larameca -
Category
Engineering
-
view
21 -
download
0
Transcript of Actividad 1-lara-garcía
UNIVERSIDAD AUTÓNOMA DE YUCATÁN
FACULTAD DE INGENIERÍA
ANÁLISIS VECTORIAL
ACTIVIDAD 1
PARTE DIGITAL
Nombre: Manuel Antonio Lara García
Mtro. (a): Maritza de Coss
Licenciatura: Ingeniería en Mecatrónica

Conceptos Unidad 1
1.1 VECTORES EN LOS ESPACIOS DE DOS Y TRES DIMENSIONES
Álgebra de Vectores
Escalar: Cantidad física que se caracteriza por tener una magnitud. Representa un número
real. Ejemplos: masa, tiempo, temperatura.
Vector: cantidad física que se caracteriza por magnitud y dirección. Ejemplo: fuerza,
velocidad, momento, aceleración, dirección o desplazamiento.
Se emplea la notación para la recta, el plano y el espacio tridimensional:
i) La recta de los números reales se denota por 𝑅1 o simplemente 𝑅
ii) El conjunto de los pares ordenados (x, y) de números reales se denomina 𝑅2
iii) El conjunto de las ternas ordenadas(x, y, z) de números reales se denomina 𝑅3
Multiplicación de un vector por un escalar
Este producto combina escalares (números reales) y elementos de 𝑅3(ternas ordenadas)
para producir elementos de 𝑅3 dado una escalar 𝛼 y una terna (𝑎1, 𝑎2, 𝑎3). Definimos la
multiplicación por escalar como:
𝛼(𝑎1, 𝑎2, 𝑎3) = (𝛼𝑎1, 𝛼𝑎2, 𝛼𝑎3)
Las sumas de ternas y la multiplicación escalar satisfacen las siguientes propiedades:
i) 𝛼𝛽(𝑎1, 𝑎2, 𝑎3) = 𝛼[𝛽(𝑎1, 𝑎2, 𝑎3)] (asosiativa)
ii) (𝛼 + 𝛽)(𝑎1, 𝑎2, 𝑎3) = [𝛼(𝑎1, 𝑎2, 𝑎3)] + [𝛽(𝑎1, 𝑎2, 𝑎3)]) (distributiva)

iii) 𝛼[(𝑎1, 𝑎2, 𝑎3) + (𝑏1, 𝑏2, 𝑏3)] = 𝛼(𝑎1, 𝑎2, 𝑎3) + 𝛼(𝑏1, 𝑏2, 𝑏3)(distributiva)
iv) 𝛼(0,0,0) = (0,0,0)(propiedad del cero)
v) 0(𝑎1, 𝑎2, 𝑎3) = (0,0,0)(propiedad del cero)
vi) 𝑖(𝑎1, 𝑎2, 𝑎3) = (𝑎1, 𝑎2, 𝑎3) (propiedad del elemento unidad)
De igual manera se tiene que sea un vector 𝐴 y m un escalar, entonces:
a) Si m>0 y 𝐴 =< 𝑎1, 𝑎2, 𝑎3 >≠< 0,0,0 >, entonces se tiene que la multiplicación es
igual a 𝑚𝐴=𝑚(𝑎1, 𝑎2, 𝑎3) y este nuevo vector está en la dirección de 𝐴.
b) Si m<0 y 𝐴 =< 𝑎1, 𝑎2, 𝑎3 >≠< 0,0,0 >, entonces se tiene que la multiplicación es
igual a −𝑚𝐴=−𝑚(𝑎1, 𝑎2, 𝑎3) y este nuevo vector está en la dirección opuesta de 𝐴.
La magnitud de un vector 𝐴 por un escalar m es igual a:
|𝑚𝐴| = |𝑚||𝐴|
Vectores de la base canónica
Para representa los vectores en el espacio es conveniente introducir tres vectores
especiales sobre los ejes x, y, z:
i: el vector de componentes (1, 0, 0).
j: el vector de componentes (0, 1, 0).
k: el vector de componentes (0, 0, 1).

Sea a cualquier vector y sean (𝑎1, 𝑎2, 𝑎3) sus componentes. Entonces:
a= 𝑎1𝑖 + 𝑎2𝑗 + 𝑎3𝑘
Por lo tanto cada vector se puede expresar como suma de múltiplos escalares de i, j y k.
Suma de vectores
Dos vectores a=(𝑎1, 𝑎2, 𝑎3) y b=(𝑏1, 𝑏2, 𝑏3) son iguales si y sólo si 𝑎1 = 𝑏1, 𝑎2 = 𝑏2 y
𝑎3 = 𝑏3. Geométricamente esto significa que a y b tienen el mismo sentido y la misma
longitud (o<<tamaño>>).
La suma de vectores se define geométricamente como sigue. En el plano que contiene a los
vectores a=(𝑎1, 𝑎2, 𝑎3) y b=(𝑏1, 𝑏2, 𝑏3) se forma el paralelogramo cuyos lados adyacentes
son a y b. la suma a+ b es el segmento que parte del origen y recorre la diagonal del
paralelogramo.
Existe otra manera de ver la suma de vectores, con triángulos en vez de paralelogramos: se
traslada sin girarlo, el segmento que representa el vector b para que empiece donde

termina el vector a. el punto donde termina este segmento trasladado es el punto donde
termina el vector a + b. si a y b son colineales, el triángulo se reduce a un segmento.
Propiedades de la suma de dos vectores.
i) La suma de dos vectores en los espacios 𝑅2 y en 𝑅3, por ejemplo los vectores
𝐴 = (𝑎1, 𝑎2, 𝑎3) y �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) presentan la propiedad conmutativa, es
decir:
𝐴 + �⃗⃗� = �⃗⃗� + 𝐴
ii) Al multiplicar dos vectores que se están sumando 𝐴 + �⃗⃗� , por un escalar m se
tiene que:
𝑚(𝐴 + �⃗⃗�) = (𝑚 𝐴 + 𝑚 �⃗⃗�)
iii) Si un vector 𝐴 se le suma un vector nulo o neutro igual a 0⃗⃗ , entonces se tiene
que:
𝐴 + 0⃗⃗ = 0⃗⃗ + 𝐴 = 𝐴
iv) Si un vector 𝐴 se suma con su inverso es decir, −𝐴 se tiene que la suma es
igual a:
𝐴 + (−𝐴 )=(−𝐴 ) + 𝐴 = 0

Suma de tres vectores
Sean tres vectores en el espacio 𝑅3 o en el espacio 𝑅2, 𝐴 = (𝑎1, 𝑎2, 𝑎3), �⃗⃗� = (𝑏1, 𝑏2, 𝑏3) y
𝐶 = (𝑐1, 𝑐2, 𝑐3) , se tiene que la suma vectorial igual presenta la propiedad conmutativa:
(𝐴⃗⃗⃗⃗⃗ + �⃗⃗�) + 𝐶 = 𝐴 + (�⃗⃗� + 𝐶)
Vectores
Los vectores (llamados también vectores libres) son segmentos de recta dirigidos en el
plano o espacio, con un inicio (origen) y un final (extremo). Dos de estos segmentos que se
obtengan uno de otro mediante una traslación paralela (pero sin rotación) representarán
el mismo vector.
Las componentes (𝑎1, 𝑎2, 𝑎3) son las longitudes con (signo) de las proyecciones de a sobre
los ejes coordenados, de modo equivalente, quedan definidas colocando el inicio de a en el
origen y su final es precisamente (𝑎1, 𝑎2, 𝑎3). Escribiremos 𝒂 = (𝑎1, 𝑎2, 𝑎3).
La suma de dos vectores se obtiene colocándolos final con inicio y trazando el vector que
va del inicio del primero al final del segundo.
El vector que une dos puntos
Si el punto P tiene coordenadas (x, y, z) y P´ tiene coordenadas (x´, y´, z´), entonces el vector
𝑃𝑃´ ⃗⃗⃗⃗⃗⃗⃗⃗⃗ que tiene inicio en P y final en P´ tiene componentes (𝑥´ − 𝑥, 𝑦´ − 𝑦, 𝑧´ − 𝑧).

Producto escalar
Supongamos que tenemos dos vectores a y b en 𝑅3 y queremos determinar el ángulo entre
ellos, esto es el menor ángulo que forman a y b en el plano que ambos generan. El producto
escalar nos permite hacerlo, pero antes de comprobar esto vamos a desarrollar el concepto
formal.
Sean �⃗� = 𝑎1𝑖 + 𝑎2𝑗 + 𝑎3𝑘 y �⃗⃗� = 𝑏1𝑖 + 𝑏2𝑗 + 𝑏3𝑘. Definimos el producto escalar de
�⃗� 𝑦 �⃗⃗� , y lo escribimos como �⃗� ∙ �⃗⃗�, como el número real:
�⃗� ∙ �⃗⃗� = 𝑎1𝑏1 + 𝑎2𝑏2 + 𝑎3𝑏3
Propiedades del producto escalar:
a) �⃗� ∙ �⃗⃗� = �⃗⃗� ∙ �⃗� (𝑝𝑟𝑜𝑝𝑖𝑒𝑑𝑎𝑑 𝑐𝑜𝑛𝑚𝑢𝑎𝑡𝑖𝑣𝑎)
b) (𝑚�⃗�) ∙ �⃗⃗� = �⃗� ∙ (𝑚�⃗⃗� )
c) �⃗� ∙ (�⃗⃗� + 𝑐) = �⃗� ∙ �⃗⃗� + �⃗� ∙ 𝑐 (𝑝𝑟𝑜𝑝𝑖𝑒𝑑𝑎𝑑 𝑑𝑖𝑠𝑡𝑟𝑖𝑏𝑢𝑡𝑖𝑣𝑎)
d) Se deduce del teorema de Pitágoras que la longitud del vector a= 𝑎1𝑖 + 𝑎2𝑗 + 𝑎3𝑘
es igual a √𝑎12 + 𝑎2
2 + 𝑎32. La longitud del vector a se denota como ‖𝑎‖, se tiene
entonces que:
‖𝑎‖2 = �⃗� ∙ �⃗�
Vectores unitarios
Los vectores que tienen norma o magnitud igual a 1 se llaman vectores unitarios. Por
ejemplo los vectores i, j, k son vectores unitarios. Nótese que para cualquier vector a, 𝑎/‖𝑎‖
es un vector unitario, cuando dividimos a entre ‖𝑎‖, se dice que se normaliza al vector a.
Distancia
Si a y b son vectores, hemos visto que el vector 𝑏 − 𝑎 es paralelo y tiene la misma longitud
del segmento que une los extremos de a y b. De aquí se tiene que la distancia entre ambos
extremos es precisamente ‖𝑏 − 𝑎‖
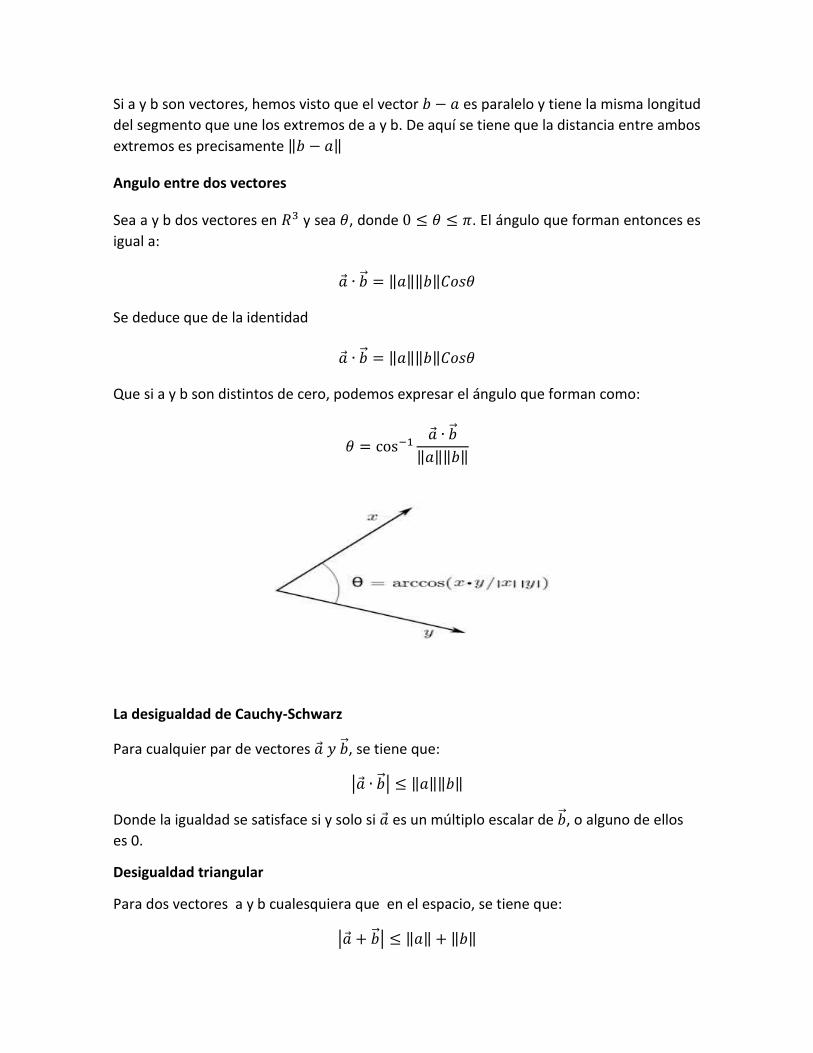
Angulo entre dos vectores
Sea a y b dos vectores en 𝑅3 y sea 𝜃, donde 0 ≤ 𝜃 ≤ 𝜋. El ángulo que forman entonces es
igual a:
�⃗� ∙ �⃗⃗� = ‖𝑎‖‖𝑏‖𝐶𝑜𝑠𝜃
Se deduce que de la identidad
�⃗� ∙ �⃗⃗� = ‖𝑎‖‖𝑏‖𝐶𝑜𝑠𝜃
Que si a y b son distintos de cero, podemos expresar el ángulo que forman como:
𝜃 = cos−1�⃗� ∙ �⃗⃗�
‖𝑎‖‖𝑏‖
La desigualdad de Cauchy-Schwarz
Para cualquier par de vectores �⃗� 𝑦 �⃗⃗�, se tiene que:
|�⃗� ∙ �⃗⃗�| ≤ ‖𝑎‖‖𝑏‖
Donde la igualdad se satisface si y solo si �⃗� es un múltiplo escalar de �⃗⃗�, o alguno de ellos
es 0.
Desigualdad triangular
Para dos vectores a y b cualesquiera que en el espacio, se tiene que:
|�⃗� + �⃗⃗�| ≤ ‖𝑎‖ + ‖𝑏‖

Proyección Ortogonal
Si v es un vector, y l es la recta que pasa por el origen y tiene la dirección del vector a, la
proyección ortogonal de v sobre es el vector p cuyo extremo se obtiene al trazar un recta
perpendicular a l desde el extremo de v.
V es u múltiplo de a, y que v es la suma de p y un vector q perpendicular a a. Por tanto,
𝑣 = 𝑐𝑎 + 𝑞
Donde 𝑝 = 𝑐𝑎 y 𝑞 ∙ 𝑎 = 0. Si multiplicamos por a escalarmente en ambos lados de la
igualdad 𝑣 = 𝑐𝑎 + 𝑞, tenemos que 𝑎 ∙ 𝑣 = 𝑐𝑎 ∙ 𝑎, de modo que 𝑐 = 𝑎 ∙ 𝑣/(𝑎 ∙ 𝑎), y
entonces:
𝑝 =𝑎 ∙ 𝑣
‖𝑎‖2𝑎
La longitud de p es igual a:
𝑝 =𝑎 ∙ 𝑣
‖𝑎‖2‖𝑎‖ =
|𝑎 ∙ 𝑣|
‖𝑎‖= ‖𝑣‖𝐶𝑜𝑠𝜃
El producto vectorial
El producto vectorial supongamos que 𝑎 = 𝑎1𝑖 + 𝑎2𝑗 + 𝑎3𝑘 y 𝑏 = 𝑏1𝑖 + 𝑏2𝑗 + 𝑏3𝑘. El
producto vectorial o producto cruz de a y b de notado por 𝑎 𝑋 𝑏 se define como vector
𝑎 𝑋 𝑏 = |𝑎2 𝑎3
𝑏2 𝑏3| 𝒊 − |
𝑎1 𝑎3
𝑏1 𝑏3| 𝑗 + |
𝑎1 𝑎2
𝑏1 𝑎2| 𝑘
𝑎 𝑋 𝑏 = |𝒊 𝒋 𝒌
𝑎1 𝑎2 𝑎3
𝑏1 𝑏2 𝑏3
|
Algunas propiedades algebraicas del producto vectorial se deducen de la definición. Si a, b
y c son vectores, y α, β y ϒ escalares, entonces:
i) 𝑎 × 𝑏 = −( 𝑏 × 𝑎)
ii) 𝑎 × (𝛽𝑏 + 𝛾𝑐) = 𝛽 ( 𝑎 × 𝑏) + 𝛾( 𝑎 × 𝑐)
iii) (𝛼𝑎 × 𝛽𝑏) × 𝑐 = 𝛼( 𝑎 × 𝑐) + 𝛽( 𝑏 × 𝑐)
iv) Nótese que 𝑎 × 𝑎 = −( 𝑎 × 𝑎), por la propiedad i).Por lo tanto,
𝑎 × 𝑎 = 0.
En particular,
v) 𝑖 × 𝑖 = 0, 𝑗 × 𝑗 = 0, 𝑘 × 𝑘 = 0

También,
vi) 𝑖 × 𝑗 = 𝑘, 𝑗 × 𝑘 = 𝑖, 𝑘 × 𝑖 = 𝑗
Producto mixto
Se llama producto mixto de a, b y c. Para obtener una fórmula de éste, sean 𝑎 = 𝑎1𝑖 +
𝑎2𝑗 + 𝑎3𝑘, 𝑏 = 𝑏1𝑖 + 𝑏2𝑗 + 𝑏3𝑘 y 𝑐 = 𝑐1𝑖 + 𝑐2𝑗 + 𝑐3𝑘. Entonces,
(𝑎 × 𝑏) ∙ 𝑐 = (|𝑎2 𝑎3
𝑏2 𝑏3| 𝒊 − |
𝑎1 𝑎3
𝑏1 𝑏3| 𝑗 + |
𝑎1 𝑎2
𝑏1 𝑎2| 𝑘) ∙ (𝑐1𝑖 + 𝑐2𝑗 + 𝑐3𝑘)
= (|𝑎2 𝑎3
𝑏2 𝑏3| 𝑐1 − |
𝑎1 𝑎3
𝑏1 𝑏3| 𝑐2 + |
𝑎1 𝑎2
𝑏1 𝑎2| 𝑐3)
(𝑎 × 𝑏) ∙ 𝑐 = |
𝑎1 𝑎2 𝑎3
𝑏1 𝑏2 𝑏3
𝑐1 𝑐2 𝑐3
|
Si c es un vector plano generado por los vectores a y b, la tercera fila del determinante que
expresa (𝑎 × 𝑏) ∙ 𝑐 es una combinación lineal de la primera y de la segunda fila, y por tanto
(𝑎 × 𝑏) ∙ 𝑐 = 0. En otras palabras, el vector 𝑎 × 𝑏 es ortogonal a cualquier vector del plano
generado por a y b, y en particular a ambos vectores.
Definición geométrica del producto vectorial
1) Definición geométrica 𝑎 × 𝑏 = ‖𝑎‖‖𝑏‖𝑆𝑒𝑛𝜃, el área del paralelogramo definido
por a y b (𝜃 es el ángulo) formado por a y por b con 0 ≤ 𝜃 ≤ 𝜋.
2) 𝑎 × 𝑏 es perpendicular a a y b, y la terna (a, b, 𝑎 × 𝑏) satisface la regla de la mano
derecha.
Triple Producto Escalar
Si se tienen tres vectores, un vector 𝐴, un vector �⃗⃗� y un vector 𝐶 el triple producto escalar
de estos tres vectores es igual a:

|�⃗⃗� × 𝐶||𝐴|𝐶𝑜𝑠𝜃 = 𝐴 ∙ �⃗⃗� × 𝐶
Esta ecuación representa el Volumen de un paralepípedo
con una base |�⃗⃗� × 𝐶| y con altura igual a |𝐴|𝐶𝑜𝑠𝜃
Tome en cuenta que si el Volumen es igual a cero,
entonces los vectores son los vectores 𝐴, �⃗⃗�, 𝐶 son
coplanares.
Se tiene que si uno de los vectores se repite el triple producto escalar es igual a 0, es decir:
𝐴 ∙ 𝐴 × 𝐶 = 0
𝐴 ∙ �⃗⃗� × �⃗⃗� = 0
𝐶 ∙ �⃗⃗� × 𝐶 = 0
Se puede afirmar que si el punto y la cruz intercambian de posición el resultado es el mismo,
es decir:
𝐴 ∙ �⃗⃗� × 𝐶 = 𝐴 × �⃗⃗� ∙ 𝐶
El triple producto vectorial
Si se tienen tres vectores, un vector 𝐴, un vector �⃗⃗� y un vector 𝐶 el triple producto vectorial
de estos tres vectores es igual a:,
𝐴 × �⃗⃗� × 𝐶 = (𝐴 ∙ 𝐶)�⃗⃗� − (𝐴 ∙ �⃗⃗�)𝐶
El triple producto vectorial no presenta la propiedad asociativa, es decir:
𝐴 × (�⃗⃗� × 𝐶) ≠ (𝐴 × �⃗⃗�) × 𝐶
LA ECUACIÓN DEL PLANO
Sea P un plano en el espacio que contiene al punto𝑃0 = (𝑥0, 𝑦0, 𝑧0) y supongamos que 𝑛 =
𝐴𝑖 + 𝐵𝑗 + 𝐶𝑘 es un vector normal a ese plano. Sea 𝑃 = (𝑥, 𝑦, 𝑧) un punto en 𝑅3. Entonces
𝑃 = (𝑥, 𝑦, 𝑧) está en el plano P si y sólo si el vector 𝑃𝑃0⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ = (𝑥 − 𝑥0)𝑖 + (𝑦 − 𝑦0)𝑗 +
(𝑧 − 𝑧0)𝑘 es perpendicular a 𝑛, esto es, 𝑃𝑃0⃗⃗ ⃗⃗ ⃗⃗ ⃗⃗ ∙ 𝑛 = 0 o, equivalente.
(𝐴𝑖 + 𝐵𝑗 + 𝐶𝑘) ∙ [(𝑥 − 𝑥0)𝑖 + (𝑦 − 𝑦0)𝑗 + (𝑧 − 𝑧0)𝑘] = 0
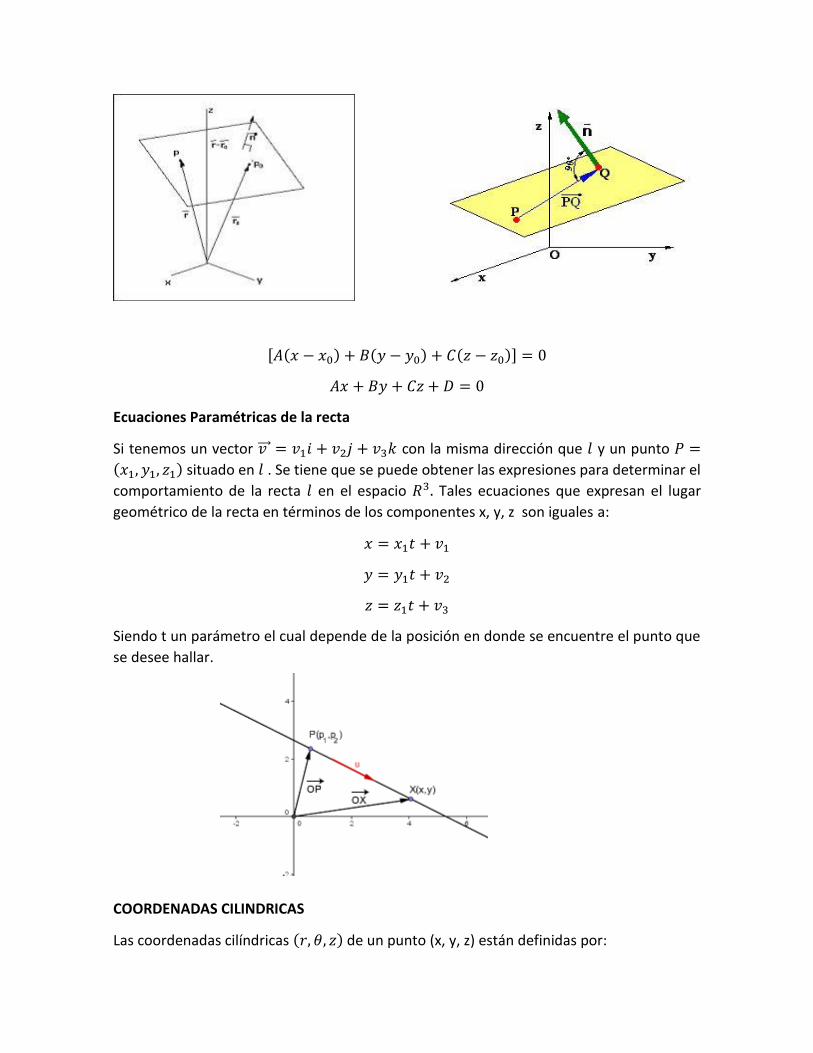
[𝐴(𝑥 − 𝑥0) + 𝐵(𝑦 − 𝑦0) + 𝐶(𝑧 − 𝑧0)] = 0
𝐴𝑥 + 𝐵𝑦 + 𝐶𝑧 + 𝐷 = 0
Ecuaciones Paramétricas de la recta
Si tenemos un vector 𝑣 ⃗⃗⃗ ⃗ = 𝑣1𝑖 + 𝑣2𝑗 + 𝑣3𝑘 con la misma dirección que 𝑙 y un punto 𝑃 =
(𝑥1, 𝑦1, 𝑧1) situado en 𝑙 . Se tiene que se puede obtener las expresiones para determinar el
comportamiento de la recta 𝑙 en el espacio 𝑅3. Tales ecuaciones que expresan el lugar
geométrico de la recta en términos de los componentes x, y, z son iguales a:
𝑥 = 𝑥1𝑡 + 𝑣1
𝑦 = 𝑦1𝑡 + 𝑣2
𝑧 = 𝑧1𝑡 + 𝑣3
Siendo t un parámetro el cual depende de la posición en donde se encuentre el punto que
se desee hallar.
COORDENADAS CILINDRICAS
Las coordenadas cilíndricas (𝑟, 𝜃, 𝑧) de un punto (x, y, z) están definidas por:
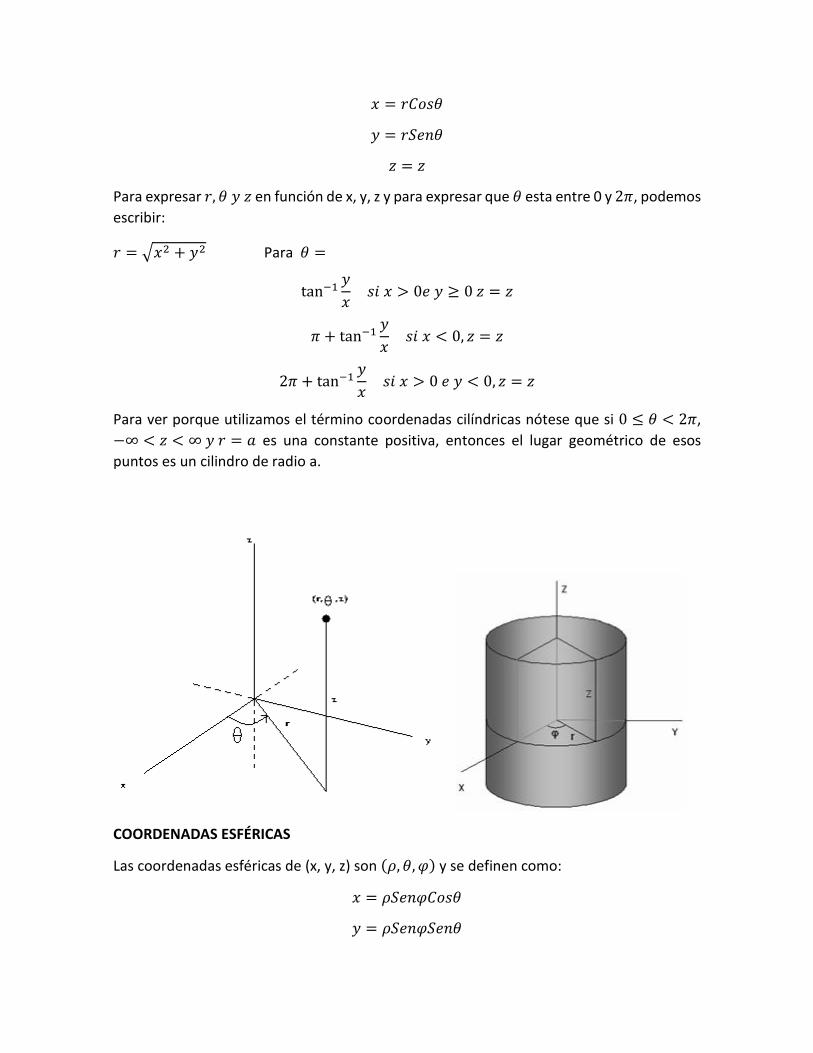
𝑥 = 𝑟𝐶𝑜𝑠𝜃
𝑦 = 𝑟𝑆𝑒𝑛𝜃
𝑧 = 𝑧
Para expresar 𝑟, 𝜃 𝑦 𝑧 en función de x, y, z y para expresar que 𝜃 esta entre 0 y 2𝜋, podemos
escribir:
𝑟 = √𝑥2 + 𝑦2 Para 𝜃 =
tan−1𝑦
𝑥 𝑠𝑖 𝑥 > 0𝑒 𝑦 ≥ 0 𝑧 = 𝑧
𝜋 + tan−1𝑦
𝑥 𝑠𝑖 𝑥 < 0, 𝑧 = 𝑧
2𝜋 + tan−1𝑦
𝑥 𝑠𝑖 𝑥 > 0 𝑒 𝑦 < 0, 𝑧 = 𝑧
Para ver porque utilizamos el término coordenadas cilíndricas nótese que si 0 ≤ 𝜃 < 2𝜋,
−∞ < 𝑧 < ∞ 𝑦 𝑟 = 𝑎 es una constante positiva, entonces el lugar geométrico de esos
puntos es un cilindro de radio a.
COORDENADAS ESFÉRICAS
Las coordenadas esféricas de (x, y, z) son (𝜌, 𝜃, 𝜑) y se definen como:
𝑥 = 𝜌𝑆𝑒𝑛𝜑𝐶𝑜𝑠𝜃
𝑦 = 𝜌𝑆𝑒𝑛𝜑𝑆𝑒𝑛𝜃
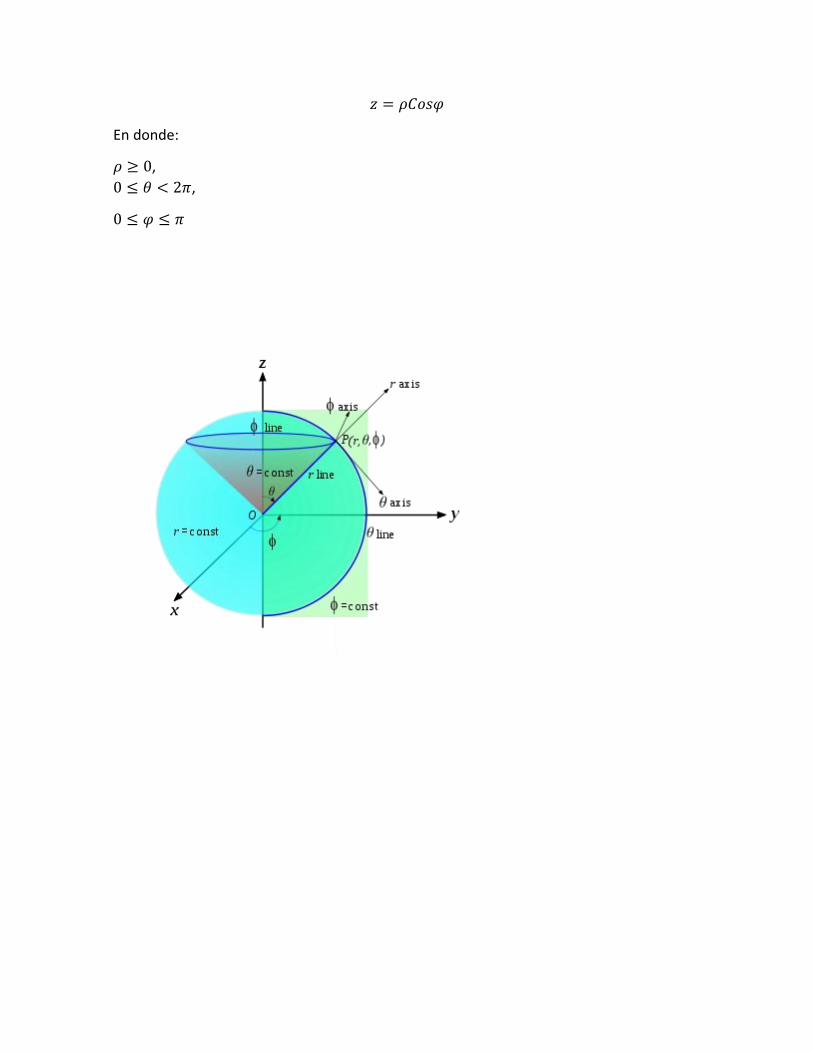
𝑧 = 𝜌𝐶𝑜𝑠𝜑
En donde:
𝜌 ≥ 0,
0 ≤ 𝜃 < 2𝜋,
0 ≤ 𝜑 ≤ 𝜋

CONCLUSIONES
Entre las conclusiones que se pueden obtener respecto a la actividad realizada se
encuentran:
El análisis de vectores y el manejo de estos en espacios tridimensionales 𝑅3 pueden
ayudar a resolver problemas físicos y matemáticos en donde se requiera la
utilización de estos, para determinar por ejemplo la aceleración 𝑎, velocidad 𝑣,
𝑠 desplazamiento de una partícula en el espacio. La ecuación de un plano en el
espacio, así como la ecuación de una recta que contiene un punto (x, y, z) y un vector
paralelo a está, entre otros problemas como los relacionados con el
electromagnetismo.
Un vector es una cantidad física que se caracteriza por magnitud, dirección y
sentido, como por ejemplo, la aceleración tangencial y radial de una partícula en
movimiento circular o en el momento angular, la velocidad de un automóvil o un
tren con dirección a la cual se desplaza.
La suma vectorial se puede expresar como el vector diagonal formado por el
paralelogramo formado al trazar rectas paralelas de los vectores que se están siendo
sumados, al igual que gráficamente se puede ver como un vector 𝑐 formado en el
espacio al realizar una figura triangular con los vectores 𝑎 ⃗⃗⃗ ⃗ 𝑦 �⃗⃗� que se están
sumando, existen otras manera en representar gráficamente la suma vectorial, que
pueden simplificar muchos problemas físicos y matemáticos, como sacar el vector
resultante 𝑣𝑟⃗⃗ ⃗⃗ del desplazamiento de una partícula.
De igual manera se tiene que en una multiplicación de un vector por un escalar.
Sea un vector 𝐴 y m un escalar, entonces:
Si m>0 y 𝐴 =< 𝑎1, 𝑎2, 𝑎3 >≠< 0,0,0 >, entonces se tiene que la multiplicación es
igual a 𝑚𝐴=𝑚(𝑎1, 𝑎2, 𝑎3) y este nuevo vector está en la dirección de 𝐴.
Si m<0 y 𝐴 =< 𝑎1, 𝑎2, 𝑎3 >≠< 0,0,0 >, entonces se tiene que la multiplicación es
igual a −𝑚𝐴=−𝑚(𝑎1, 𝑎2, 𝑎3) y este nuevo vector está en la dirección opuesta de
𝐴.
Sean dos vectores 𝐴 𝑦 𝐵.⃗⃗⃗⃗ El producto escalar entre estos dos vectores representa
el menor ángulo posible entre ≤ 0 ≤ 𝜃 ≤ 𝜋, formado por tales vectores, y se
puede expresar como:
𝐴 ∙ �⃗⃗� = 𝑎1𝑏1 + 𝑎2𝑏2 + 𝑎3
O más formalmente como:
𝐴 ∙ �⃗⃗� = ‖𝐴‖‖𝐵‖𝐶𝑜𝑠𝜃

El resultado del producto vectorial da como resultado un escalar.
Sean dos vectores 𝐴 𝑦 𝐵.⃗⃗⃗⃗ El producto vectorial entre estos dos vectores representa
o da como resultado un vector 𝐶 perpendicular a ellos. El producto vectorial se
representa matemáticamente como:
𝑎 × 𝑏 = ‖𝑎‖‖𝑏‖𝑆𝑒𝑛𝜃𝑢
Se puede calcular realizando el determinante entre los componentes de tales
vectores:
𝑎 𝑋 𝑏 = |𝑎2 𝑎3
𝑏2 𝑏3| 𝒊 − |
𝑎1 𝑎3
𝑏1 𝑏3| 𝑗 + |
𝑎1 𝑎2
𝑏1 𝑎2| 𝑘
𝑎 𝑋 𝑏 = |𝒊 𝒋 𝒌
𝑎1 𝑎2 𝑎3
𝑏1 𝑏2 𝑏3
|
El resultado del producto vectorial da como resultado un vector perpendicular a los
vectores que son multiplicados.
APLICACIONES EN LA INGENIERÍA EN MECATRÓNICA
En cuestión a la ingeniería en Mecatrónica se puede decir que los conceptos definidos y
estudios se pueden aplicar de diversas formas, tomando en cuenta que la ingeniería en
Mecatrónica es una combinación sinérgica entre informática, control, automatización,
electrónica y mecánica se puede mencionar algunas aplicaciones tanto a nivel académico
como a nivel industrial-laboral, como por ejemplo:
Para la aplicación, de los conceptos aprendidos, más adelante en asignaturas superiores en
el plan de estudios como por ejemplo para el estudio de la ciencia e ingeniería de los
materiales en donde influyen factores como Presión, Resistencia, Esfuerzo, Deformación,
Fuerza de resistencia, planteamiento en diversos problemas físicos como problemas de
análisis mecánico en donde influyen la aplicación de fuerzas a un cuerpo.
Aplicación en asignaturas como procesamiento de señales, mecánica vectorial, robótica y
control, así como en diversos problemas físicos relacionados con el electromagnetismo,
fundamental para el entendimiento de conceptos vinculados con electrónica, al momento
del diseñar proyectos relacionados con magnetismo para la generación de alguna fuerza
en donde se utilicen las propiedades de los imanes y de los campos magnéticos y eléctricos
en combinación.
Hablando de casos más prácticos, vinculados con el ambiente laboral e industrial, al
momento del diseño de máquinas automatizadas, robots industriales y de control digital,
en donde se requiera determinar cuanta fuerza puede o tiene que realizar tal máquina para
realizar un determinado trabajo o esfuerzo, la aceleración y velocidad con la que se debe
mover esa máquina para realizar con los presupuestos requeridos, con el personal asignado
y las condiciones de espacio dados, el trabajo y la determinada función para la cual tal
maquina es desarrollada, diseñada e instalada. Los ejes x, y, z son los ejes en los que se basa
una determinada maquina o robot para realizar su movimiento de acuerdo con los
parámetros de posición para los cuales son programadas.

REFERENCIAS
Cálculo vectorial de Marsen & Tromba, Capitulo 1, 5taEdición