Adquisicion de Datos Miograficos Con Zigbee

of 6
-
Upload
pierre-carrillo-valenzuela -
Category
Documents
-
view
226 -
download
0
Transcript of Adquisicion de Datos Miograficos Con Zigbee
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
1/6
Abstract This paper presents a novel tool oriented to upperlimb therapy and rehabilitation and a new wireless sensorstechnology application in rehabilitation robotics destined to post-stroke patients. Design was based on Inertial Measurement Units(IMUs) communicating trough of a ZigBee Network. This Bodysensor network allows kinematics register and electrical activityquantification in muscles during rehabilitation therapy. The IMUimplementation was based on a direction cosine matrix. Thevalidation technique was represented by a kinematicsmeasurement of tridimensional videography. Simultaneousregisters, from cameras of kinematics videography and IMUswere compared on the gesture of reaching and graspingrepetitions.
Keywords ZigBee, rehabilitation robotics, inertialmeasurement unit, 3D videography.
I. I NTRODUCCION N Accidente Cerebro Vascular (ACV) se caracteriza porla prdida parcial de funcin cerebral debido a una
hemorragia interna o bloqueo de una de las dos principalesarterias de que irrigan el encfalo. Su incidencia representauno de los principales problemas en la medicina actual ya queconstituye la mayor causa de discapacidad en pasesdesarrollados [1]; en el mundo 15 millones de personas sufrenACVs, de las cuales 5 millones mueren y otras 5 millonesquedan permanentemente discapacitadas. Los ACVs son poco
frecuentes en personas menores de 40 aos, cuando ocurren,el factor principal es la alta presin arterial [2]. En EstadosUnidos, la ocurrencia de accidentes cerebrovasculares es untema de importancia en lo que respecta a salud pblica, conms de 600.000 casos diagnosticados anualmente, donde msdel 80% de los sujetos afectados presentan algn grado de paresia, con mayor frecuencia en brazos (75,5%), rostro(54,6%) y piernas (68,6%) [3]. Los tratamientos derehabilitacin son, a menudo, focalizados en el miembroinferior con el objetivo de desarrollar y mejorar la habilidad para caminar, dejando en segundo plano las intervencionesorientadas a las discapacidades del miembro superior. Sinembargo, esta disfuncin puede generar igual grado dediscapacidad, afectando aspectos de la vida cotidiana que
A. Braidot, Facultad de Ingeniera, Universidad Nacional de Entre Ros,Paran Argentina, [email protected]
C. A. Cifuentes, Departamento de Ingeniera Electrnica, UniversidadFederal del Espritu Santo, Vitria, Brasil, [email protected]
A. Frizera, Departamento de Ingeniera Electrnica, Universidad Federaldel Espritu Santo, Vitria, Brasil, [email protected]
M. Frisoli, Facultad de Ingeniera, Universidad Nacional de Entre Ros,Paran Argentina, [email protected]
S. Alfonso, Facultad de Ingeniera, Universidad Nacional de Entre Ros,Paran Argentina, [email protected]
involucren agarrar y manipular objetos [4].Varias vctimas de ACVs retoman sus habilidades en
actividades de la vida diaria, aunque con limitacionesevidentes como por ejemplo velocidad y agudeza reducida a pesar de la neuro-rehabilitacin. El desempeo torpe y lento puede ser un impedimento considerable en estos pacientes,especialmente cuando se requiere manipulacin fina. Lainvestigacin de los factores involucrados en discapacidadesfuncionales crnicas del movimiento y la agilidad delmiembro superior ayudaran a mejorar los tratamientos ydilucidar la fisiopatologa de la recuperacin motora despusde un ACV [5].
El uso de rehabilitacin robtica para proveer terapiamotriz tiene un gran potencial. Algunos de sus beneficiosabarcan: mayor posibilidad de realizar ejercicios teraputicos precisos y repetibles, reduccin del esfuerzo de los terapistasinvolucrados, incorporacin de sistemas interactivos derealidad virtual y adems, la recoleccin de datos cuantitativosque pueden ser utilizados para optimizar las sesiones deterapia y analizar el desempeo del paciente [6]. En estaaplicacin existe la necesidad de obtener variables tales comolas aceleraciones y velocidades angulares de la articulacin para cerrar bucles de control en la bsqueda de cumplirobjetivos especficos. Para ello los sensores deben contar condeterminadas caractersticas tales como escaso tamao, larga
vida til de la batera, capacidad de extraer un amplio rangode parmetros del movimiento humano, fcil adaptabilidad ala rtesis y adecuado ancho de banda, entre otros aspectos preferibles. Estas especificaciones hacen atractivos a lossensores inerciales basados en Sistemas Micro ElectroMecnicos (MEMs de sus siglas en ingls) para el campo de larehabilitacin robtica [7]. Estos sensores tales comoacelermetros, girscopios y magnetmetros pueden combinarsus mediciones a travs de IMUs para obtener registro dedatos cinemticos, tpicamente aceleracin, velocidad, posicin y orientacin.Por otro lado, el registro de electromiogrfico sEMG querepresenta el estado de activacin muscular, ha sidoampliamente usado para analizar el progreso en el proceso derehabilitacin y la interaccin humano y robot. El progreso dela recuperacin motora puede monitorearse durante elentrenamiento asistido por robot post-ACV mediante anlisiscuantitativo de los parmetros de la electromiografa [8]. Elseguimiento adicional de la intencin de control a travs delregistro mioelctrico continuo podra proveer mayorinteraccin durante el movimiento completo, lo cual sera beneficioso para promover la restitucin de la funcin motorade los pacientes luego del episodio cerebrovascular [9]. Este
A. A. A. Braidot, Member, IEEE , C. Cifuentes, A. Frizera Neto, M. Frisoli, A. Santiago
ZigBee Wearable Sensor Development forUpper Limb Robotics Rehabilitation
U
408 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
2/6
aspecto est contemplado en el presente diseo para futurasaplicaciones en el avance de esta lnea de investigacin.
II. A NTECEDENTES.Actualmente, existe una variedad de sensores IMU listos
para la transmisin de datos en forma inalmbrica [10] [11], yvarios de los mtodos de sensado han sido hallados con elobjeto de reducir las imprecisiones inherentes a lasmediciones de los sensores micro electro mecnicos [11] [12], por otro lado hay sensores eletromiogrficos implementadossobre diversos protocolos inalmbricos [13]. Nuestro trabajose concentra en el desarrollo de un sensor IMU que sea losuficientemente pequeo como para ser integrado con fciladaptabilidad tanto a la ropa como a la rtesis de un usuario.Esto puede ser usado para cerrar los lazos de control en bsqueda de propsitos especficos a travs de los sistemas derehabilitacin robtica. Al mismo tiempo estos sensores pueden utilizarse para monitoreo simultaneo de la evolucinde la terapia ya sea para el grupo mdico como para el paciente como herramienta de retroalimentacin.
La tecnologa ZigBee define las redes, seguridad y laestructura de la aplicacin para un sistema basado en IEEE802.15.4. Estas capacidades permiten a la red, tener miles dedispositivos sobre una nica red inalmbrica de trabajo. Lallamada ZigBee Alliance focalizada en el espacio del cuidadode la salud ha resultado en el desarrollo de un perfil deaplicacin pblica denominado ZigBee Health Care (ZHC). Eldiseo de este sistema surgi para usarse en dispositivos deasistencia operando en el cuidado no invasivo de la salud y proporciona un estndar de amplia aplicacin industrial parael intercambio de datos entre una variedad de dispositivosmdicos y no mdicos. La principal aplicacin de dominio yuso se aplican a casos tales como: Manejo de la Enfermedad,
Monitoreo de la Actividad Fsica Personal, y Monitoreo delBienestar Personal [14]. Este trabajo apunta al desarrollo deuna arquitectura de monitoreo para terapia de rehabilitacinrobtica basada en redes de sensores IMU portablescomunicados mediante protocolo ZigBee para el cuidado de lasalud ZHC, este sensor propuesto es implementado en unnovedoso y nico microcontrolador ARM Cortex M4 Kinetis.Este nodo de sensores permitir el registro de la cinemticadel paciente en terapia de movimiento continuo sobre todoslos segmentos del cuerpo como una Red Corporal de Sensores(llamada BSN: Body Sensor Network por sus siglas en ingls)a ser usada en aplicaciones de rehabilitacin robtica.
En este artculo exponemos los detalles del diseo y laimplementacin de los sistemas de sensores portables ZigBee.En principio, mostramos las caractersticas del sensor y lasfrmulas matemticas para su modelizacin, en segundo lugar presentamos la implementacin y la evaluacin de desempeo para rehabilitacin de miembro superior en la terapia dealcanzar y agarrar objetos. Se valid el sistema con un sistemade rastreo ptico de movimiento. Las cmaras y los sensoresIMU registraban la posicin en el mismo instante de tiempodurante el gesto de alcanzar y agarrar un objeto con laextremidad superior.
III. DISEO.El sistema de sensores portable desarrollado consiste en
una red ZigBee llamada ZIMUED compuesta de uncoordinador y varios sensores denominados dispositivosfinales, los cuales estn compuestos de una IMU y undispositivo final. El diagrama simplificado de un dispositivoZIMUED se muestra en la Fig. 1.
Figura 1. Diseo esquemtico de la ZIMUED.
A. Sensor IMU:La IMU se bas en la implementacin de una matriz de
cosenos directores, previamente desarrollada para el vuelo deaviones y helicpteros a escala [17][18][19][20].
Figura 2. (a) Sistema de ejes coordenados del segmento. (b) SistemaCoordenado Local (LSC) and Sistema Coordenado Global (GSC).
La orientacin puede ser descripta utilizando tres ngulosdenominados ngulos de Euler: 1) yaw , para la rotacin delsegmento alrededor del eje z, 2) pitch para la rotacin delsegmento alrededor del eje y y 3) roll para la rotacinalrededor del eje x (Fig 2a). Para describir el movimiento delos segmentos del cuerpo humano hacen falta definir dossistemas coordenados, El Sistema Coordenado Global dellaboratorio (GSC) y el Sistema Coordenado Local del
segmento (LSC) (Fig. 2b). Ambos sistemas son ortogonales yregidos por la regla de la mano derecha.Se utiliza una matriz 3x3 de cosenos directores para
transformar entre los sistemas de referencia, el SistemaCoordenado Global y el Sistema Coordenado Local (1).Adems es posible rotar los vectores al multiplicarlos por lamatriz de cosenos directores, donde QLSC y QGSC son vectoresmedidos en el sistema coordenado local y el sistemacoordenado global respectivamente.
BRAIDOT et al.: ZIGBEE WEARABLE SENSOR DEVELOPMENT 409
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
3/6
=
zz zy zx
yz yy yx
xz xy xx
r r r
r r r
r r r
R (1)
LSC GSC RQQ = (2)
En la matriz de cosenos directores (3) las funcionestrigonomtricas de los ngulos de Euler c y s sonabreviaturas para cos y sen respectivamente.
+
+
=
ccc s s
c s s sccc s s s sc
s s s sc scc s scc
R (3)
R permite rotar el vector de medido en el SCL hacia elSistema Coordenado Global, adems cumple con la condicinde ortogonalidad. La tasa de cambio del vector rotante producido por el movimiento se encuentra puede evaluar (4),donde (t) es la velocidad angular obtenida de los girscoposen el sistema coordenado local y r(t) el vector en el sistemaglobal.
)()()( t r t dt
t dr = (4)
El desplazamiento angular se calcula con (5).dt t t d )()( = (5)
En (6) se muestra el clculo de la posicin angular porintegracin aproximada. Desde el sistema coordenado local, elsistema coordenado global se encuentra rotando igual yopuesto a la rotacin del Sistema Coordenado Local. De estamanera los ejes del sistema global pueden verse en el sistemacoordenado local simplemente como un cambio de signo de laseal del girscopo. El signo negativo es combinado con el producto vectorial, cambiando el orden de los operandos.
)()()0()(0
t r t d r t r t
+= (6)
)()()()( t d t r t r dt t r GSC GSC GSC +=+ (7)
=+1
11
)()(dt dt
dt dt
dt dt
t Rdt t R
x y
x z
y z
(8)
La expresin (7) permite actualizar la matriz de cosenosdirectores desde las seales provenientes de los giroscopios.Los elementos unidad en la matriz en la diagonal (8),representan el primer trmino de la ecuacin (7). Loselementos fuera de la diagonal representan el segundo trmino
de esta ecuacin. sta matriz R se actualiza con rotacionescada vez ms grandes cada vez que se produce el muestreo, por consiguiente es posible obtener los ngulos de Euler, esdecir la orientacin del segmento (9) desde el ltimo rengln yla primer columna de la matriz (3).
),(tan),(tan
)(sin
1
1
1
xx yx
zz zy
zx
r r
r r
r
=
=
=
(9)
El diseo final de la IMU sobre el microcontroladorK53N512 se muestra en la Fig. 3. El girscopo triaxial es lafuente principal de informacin, esta variacin angular esintegrada en cada eje para as obtener constantemente la posicin angular en tiempo real mediante la rutina que utilizade la matriz de cosenos directores.
Figura 3. Diagrama en bloque del sensor de la IMU.
Adicionalmente este algoritmo realiza una normalizacinde la matriz, con el fin de eliminar el ruido numrico que podra acumularse durante la integracin y que con el paso delas muestras violara el requerimiento de ortogonalidad que
deben satisfacerse en la matriz de cosenos directores. Por elloes necesario realizar pequeos ajustes en los elementos de lamatriz para satisfacer esta condicin.
De la misma manera es necesario realizar la deteccin dela desviacin del giroscopio, ya que el offset de este acumulagradualmente errores en los elementos de la nombrada matriz.Este procedimiento se realiza en tres etapas: 1) utilizandovectores referencia de orientacin para poder cuantificar ladesviacin. Estos vectores se obtienen a partir de unmagnetmetro el cual detecta la desviacin del yaw , y unacelermetro que detecta la desviacin del pitch y el roll . 2)Realimentando el vector error mediante un controlador proporcional-integral, reajustando los girscopios. 3)Restando el error de rotacin a la seal registrada de losgirscopos. El muestreo de los sensores es realizado a 60Hz para ser compatible con la tasa de muestreo del sistema devideo utilizado para la validacin experimental.
B. Red ZIMUEDLa red ZigBee tiene tres tipos de dispositivos: dispositivos
finales (ZED, ZigBee End Device), routers (ZR, ZigBeeRouters) y slo un coordinador (ZC, ZigBee Cordinator). Lared ZIMUED propuesta en este trabajo se implement sobre el perfil de aplicacin ZHC y la pila ZigBee de Freescale para elchip MC13224. Esta red es una configuracin estrella dondeel ZC recibe la informacin del paciente de los ZED. El protocolo de la red usa multiplexacin de tiempo donde sedefine un tiempo de transmisin para que cada ZED enve alZC. El perodo de comunicacin comienza en el momento queel ZC enva un paquete de datos a los ZED, momento en elcual los ZED comienzan a tomar las mediciones de la IMU. A partir de aqu preparan los futuros paquetes de transmisin,cada cual es exclusivamente identificado por un ndice. Latopologa tipo estrella en la que se encuentra la red reduce lasinterrupciones en la recepcin de paquetes provenientes de losdistintos ZED, ya que cada uno debe enviar el paquete en untiempo particular, permitiendo una buena tasa de transferencia
410 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
4/6
con baja perdida de datos [22].
IV. I MPLEMENTACIN.El sistema portable implementado consiste bsicamente en
dos pequeas tarjetas de circuitos impresos: el circuito desensores y el circuito ZigBee. Estas versiones han sidodesarrolladas como un prototipo, en versiones posteriores se planea reducir el tamao integrando ambos bloques en unasola tarjeta.
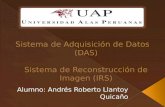
La tarjeta de sensores se muestra en la Fig. 4. Tiene unmicrocontrolador KN53N512 conectado por buses I2C aambos sensores inerciales para el procesamiento de lasseales. Posee adems conexin USB para reprogramacin ydepuracin en tiempo real, tambin capacidad para tarjetamicroSD en caso de requerirse almacenamiento masivo. En su parte superior posee dos conectores con los que se lacomunica a la tarjeta que posee el modulo ZigBee.Adicionalmente posee un pack de bateras ya que debe ser undispositivo portable.
Figura 4. Tarjeta del sensor de la IMU.
La tarjeta ZigBee montada sobre la tarjeta de sensores posee el microcontrolador MC13224 con el fin de permitirdiferentes aplicaciones se la ha diseado con tres posiblesantenas: SMA para grandes distancias, tipo chip paradisminuir el tamao y tipo F para reducir la cantidad decomponentes. Adems esta tarjeta posee pulsadores y LEDs para realizar la configuracin y la inicializacin de losrespectivos mdulos (Fig. 5).
Figura 5. Tarjeta ZigBee Health Care Board sobre la IMU.
Finalmente, en la Fig. 6, se muestra la red ZIMUEDaplicada. En cada dispositivo terminal ZIMUED la tarjeta desensores manda a una tasa determinada los datos procesados al
modulo ZigBee en la tarjeta superior, el cual enva los datos alcoordinador en una red tipo estrella, este recibe los paquetes provenientes de los distintos dispositivos terminales y enva lainformacin a PC va USB para post-procesamiento yvisualizacin. Resumiendo el proceso de adquisicin de datosel IMU enva de datos va el bus I2C haca el
microcontrolador K53N512 a una tasa de 60Hz. Luego seenva esta informacin, nuevamente haca la tarjeta superiorque posee el modulo Zigbee embebido en el microcontroladorMC13224, mientras que la informacin cinemtica se enva encuanto se adquiere. Luego se produce la transmisininalmbrica a travs de la red ZIMUED en el tiempo particularasignado por el coordinador.
Figura 6. Configuracin de la red ZIMUED.
V. VALIDACION .La validacin del mtodo se realiz adquiriendo
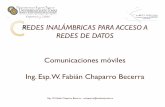
simultneamente datos a travs del sistema inalmbricodesarrollado y del sistema de video 3D convencionalampliamente utilizado para anlisis biomecnicos. Se eligi elgesto de alcanzar y agarrar debido a la importancia de estemovimiento en la independencia y calidad de vida de los pacientes con secuelas de accidentes cerebrovasculares, elcual es mencionado en la introduccin. Detalles de lacinemtica del tronco y el miembro inferior pueden serencontrados en trabajos existentes [23]. En el desarrollo del presente trabajo se han empleado 10 marcadores reflectivoslocalizados en los siguientes posiciones anatmicas: sptimacervical, acromion izquierdo, acromion derecho, esternn,olecranon, estiloides radial, estiloides ulnar, tercermetacarpiano, marcador radial del brazo y trapecio (Fig. 7).
Con los datos registrados por el sistema de videografa se puede calcular la posicin de los segmentos a partir de larealizacin de un modelo antropomtrico con el fin de poderestimar los centros articulares del hombro, codo y mueca[24]. Adems de encontrar estos centros articulares, se deben poder conocer la orientacin espacial de los diferentessegmentos brazo y antebrazo, para ello se debe generar primero un sistema coordenado local ubicado en el centro degravedad del segmento [23].
BRAIDOT et al.: ZIGBEE WEARABLE SENSOR DEVELOPMENT 411
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
5/6
Figura 7. Localizacin de los marcadores y la IMU para el registrosimultneo.
El protocolo de validacin del nuevo mtodo deadquisicin se efectu mediante los registros simultneos devideografa tridimensional y los sensores IMU. El gesto dealcanzar y agarrar se realiza con el sujeto sentado frente a unamesa colocada en altura coincidente a las cmaras de video. El
brazo derecho del sujeto en reposo, con el codo y el antebrazoubicados sobre la mesa formando un ngulo de flexin deaproximadamente 90 respecto al brazo. Un ciclo del gestocompleto representa la extensin del miembro superior hastaagarrar el objeto ubicado en la mesa a una distancia delalcance de la mano y regresar hasta colocar la extremidad enla posicin donde se inicio del gesto.
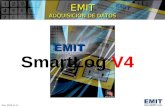
Para validar el sistema diseado de registro de la IMU secomparan los resultados de los datos obtenidos en simultneocon ambas tcnicas de registro. Con los datos de ambossistemas de registro se calcula en forma vectorial el ngulo deflexin-extensin del codo. En la Fig. 8 se muestran losvalores correspondientes al ngulo de flexin-extensin delcodo para 3 gestos del movimiento de alcanzar y agarrar para
un mismo sujeto con diferentes colores, en funcin del porcentaje del ciclo. Las dos graficas de un mismo colorcorresponden el mismo gesto registrado. En trazo continuo losdatos calculados con el sistema de video y con trazo cortadolos datos calculados con el correspondiente a la IMU.
Figura 8. Comparacin de registros videogrficos y de IMUs para 3 gestos.
En la Fig. 9 se puede observar el alto grado derepetibilidad que presentan las seales adquiridas por lasIMUs para 14 gestos de un mismo individuo efectuadas endiferentes das, donde se verifica la similitud morfolgica ylos datos de ngulos de flexin-extensin del codo en funcin
del porcentaje del ciclo. Se puede apreciar que los datos estnlibres de ruido y artefactos.
Figura 9. Curvas del ngulo del codo proveniente de 14 gestos de un sujeto endistintos das de registro.
VI. CONCLUSIONES.El novedoso sistema inalmbrico presentado en este trabajo
bajo protocolos de transmisin ZigBee desarrollados para uso portable en rehabilitacin es una fuente confiable deadquisicin de datos cinemticos, lo que sumado a las ventajasya descritas del sistema promete constituir un importanteavance en rehabilitacin robtica con biofeedback . Lacontinuacin de esta investigacin a travs de mayor registrode datos entre diversos pacientes y con un clculo msavanzado de los datos cinemticos y el agregado del registroelectromiogrfico, permitirn ponderar mejores perspectivasdel aporte real de esta innovacin en el campo de larehabilitacin de miembro superior. Asimismo este sistemadiseado permite estudiar otro tipo de movimientos cuyarehabilitacin funcional sea de importancia en los pacientesotras con secuelas debido a accidentes cerebrovasculares o aotro tipo de enfermedades.
R EFERENCIAS [1] W.S. Harwin, J.L. Patton and V.R. Edgerton, Challenges and
Opportunities for Robot-Mediated Neurorehabilitation, Proceedings ofthe IEEE, vol.94, no.9, pp.1717-1726, Sept. 2006.
[2] Mackay, G. Mensah, Atlas of heart disease and stroke, World HealthOrganization, pp.15-16, 2004.
[3] S. Rathore, A. Hinn, L. Cooper, H. Tyroler and W. Posamond. (2002,June). Characterization of incident stroke signs and symptoms: findingsfrom the atherosclerosis risk in communities study, Stroke 2002[Online], 33(11). pp. 2718-2721. Available:ttp://stroke.ahajournals.org/content/33/11/2718.
[4] A. H. Mackey, S. E. Walt, G. A. Lobb and N. S. Stott, Reliability ofupper and lower limb three-dimensional kinematics in children withhemiplegia, Gait & Posture, vol. 22, no. 1, pp. 1-9, August 2005.
[5] R. Wenzelburger, F. Kopper, A. Frenzel, H. Stolze, S. Klebe, A. Bross-mann, J. Kuhtz-Buschbeck and M. Illert. (2004, October) Handcoordination following capsular stroke, Brain [Online], 128(1). Pp. 64
74. Available: http://brain.oxfordjournals.org/content/128/1/64.[6] C. N. Schabowsky, S. B. Godfrey, R. J. Holley and P. S. Lum. (2010,July). Development and pilot testing of HEXORR: Hand EXOskeletonRehabilitation Robot, Journal of NeuroEngineering and Rehabilitation[Online], 7(1). pp. 36. Available:http://www.jneuroengrehab.com/content/7/1/36.
[7] E. Rocon, J.C. Moreno, A.F. Ruiz, F. Brunetti, J.A. Miranda and J.L.Pons, Application of inertial sensors in rehabilitation robotics, inProceedings of the 2007 International Conference on RehabilitationRobotics, 2007, pp. 145-150.
[8] X.L. Hu, K.Y. Tong, R. Song, X.J. Zheng, K.H. Lui, W.W.F. Leung, S. Ng and S.S.Y. Au-Yeung, Quantitative evaluation of motor funct ional
412 IEEE LATIN AMERICA TRANSACTIONS, VOL. 11, NO. 1, FEB. 2013
-
7/25/2019 Adquisicion de Datos Miograficos Con Zigbee
6/6
recovery process in chronic stroke patients during robotassisted wristtraining, Journal of Electromyography and Kinesiology, Vol. 19, no. 4,
pp. 639-650, Aug. 2009.[9] R. Song, K. Tong, X. Hu and L. Li, Assistive Control System Using
Continuous Myoelectric Signal in Robot-Aided Arm Training forPatients After Stroke, IEEE Transactions on Neural Systems andRehabilitation Engineering, vol. 16, no. 4, pp. 371-379, Aug. 2008.
[10] V. van Acht, E. Bongers, N. Lambert and R. Verberne, Miniature
Wireless Inertial Sensor for Measuring Human Motions, in Proceedingsof the 2007 Annual International Conference of the IEEE Engineering inMedicine and Biology Society, 2007, pp. 6278-6281.
[11] M. El-Gohary, L. Holmstrom, J. Huisinga, E. King, J. McNames and F.Horak, Upper limb joint angle tracking with inertial sensors, inProceedings of the 2011 Annual International Conference of the IEEEEngineering in Medicine and Biology Society, 2011,pp. 5629-5632.
[12] E. Edwan, J. Zhang, J. Zhou and O. Loffeld, Reduced DCM basedattitude estimation using low-cost IMU and magnetometer triad, inProceedings of the 2011 Workshop on Positioning Navigation andCommunication, 2011,pp. 1-6.
[13] W. Youn and J. Kim, "Development of a compact-size and wirelesssurface EMG measurement system," in Proceedings of theICCASSICE,2009,pp. 1625-1628.
[14] C.A. Cifuentes, G.G. Gentiletti, M.J. Suarez and L.E. Rodriguez,Development of a Zigbee platform for bioinstrumentation, inProceedings of the 2010 Annual International Conference of the IEEEEngineering in Medicine and Biology Society, 2010,pp. 390-393.
[15] Freescale Semiconductor, K53 Sub-Family Data Sheet Data Sheet, Rev.6, (2011, September) [Online]. Available: http://www.freescale.com/[16] Freescale Semiconductor, MC1322x Technical Data, Rev. 1.3, (2010,
October) [Online]. Available: http://www.freescale.com/[17] R. Mahony, T. Hamel and J. M. Pflimlin, Nonlinear Complementary
Filters on the Special Orthogonal Group, IEEE Transactions onAutomatic Control, vol. 53, no. 5, pp. 1203-1218, June 2008.
[18] M. Euston, P. Coote, R. Mahony, K. Jonghyuk and T. Hamel, Acomplementary filter for attitude estimation of a fixed-wing UAV, inProceedings of the 2008 International Conference on Intelligent Robotsand Systems, 2008,pp.340-345.
[19] G. Baldwin, R. Mahony, J. Trumpf, T. Hamel, Complementary filterdesign on the Special Euclidean group SE(3), in Proceedings of the2007 European Control Conference, 2007.
[20] R. Mahony, C. Sung-Han, and T. Hamel, A coupled estimation andcontrol analysis for attitude stabilisation of mini aerial vehicles, inProceedings of the 2006 Australasian Conference on Robotics andAutomation, 2006.
[21] Freescale Semiconductor, Freescale Solutions for Electrocardiographand Heart Rate Monitor Applications, (2011, June) [Online]. Available:http://www.freescale.com/
[22] C.A. Cifuentes and L. Rodrguez, Anlisis Biomecnico de la Marcha basado en Acelermetros sobre una Red ZigBee, in Proceedings of the2011 V Latin American Congress on Biomedical Engineering, 2011.
[23] A. Braidot, G. Canalis, P. Dieser, S. Gomez and M. Crespo, Anlisisdel Gesto de Alcanzar y Agarrar un Objeto en Pacientes con ACV, inProceedings of the 2011 V Latin American Congress on BiomedicalEngineering, 2011.
[24] G. Rab, K. Petuskey and A. Bagley, A method for determination ofupper extremity kinematics, Gait and Posture vol. 15 no. 1, pp. 113119, 2002.
Ariel Braidot received a Bioengineering degree fromFacultad de Ingeniera-Universidad Nacional de Entre Rosand a PhD from Universidad Nacional del Litoral (UNL) in
2001. He is a Professor of Biomechanics at FI-UNER since1998. His current investigation field is focused onrehabilitation biomechanics, register and modeling of human movement.
Carlos A. Cifuentes G. received the Biomedical Engineeringmaster degree from Universidad Nacional de Entre Ros,Argentina, in 2011, and is a PhD student of the Robotics andIndustrial Automation Group from Universidade Federal doEsprito Santo, Brazil. He is broadly interested inrehabilitation robotics.
Anselmo Frizera Neto received the Electrical Engineeringdegree from Federal University of Esprito Santo (UFES),Brazil, in 2006. In 2010, he obtained his Ph.D. in Electronicsfrom Universidad de Alcal, Spain. From 2006 to 2010 heworked as a researcher at the Bioengineering Group, Spanish
National Research Council (CSIC). Currently, he is aProfessor at the Electrical Engineering Department, UFES. His researchinterests are rehabilitation robotics, humanmachine interaction and
movement analysis.
Melisa Frisoli received the Bioengineering degree fromFacultad de Ingeniera-Universidad Nacional de Entre Ros -Oro Verde, Entre Ros, Argentina, in 2010, and is a PhDstudent as a CONICET researcher in the same Faculty. Herinvestigation field is focused on rehabilitation biomechanics.
Alfonso Santiago: Bioengineering student in Universidad Nacional de Entre Ros (UNER) since 2007. He has beenworking as a collaborator in the biomechanics laboratoryfrom 2011.
BRAIDOT et al.: ZIGBEE WEARABLE SENSOR DEVELOPMENT 413