Altura Metacentrica
11
PRACTICAS DE HIDRAULICA I ALTURA METACÉNTRICA Berrezueta, J., Bolaños, S., Cárdenas, C., Moscoso, A. 1. Introducción: Estabilidad de cuerpos flotantes y sumergidos Un cuerpo que flota en un líquido estático tiene una estabilidad vertical. Un pequeño desplazamiento hacia arriba disminuye el volumen del líquido desplazado, lo cual da como resultado una fuerza no balanceada hacia abajo que tiende a retomar el cuerpo a su posición original. Similarmente, un pequeño desplazamiento hacia abajo genera una fuerza de boyamiento mayor, la cual causa un desbalance hacia arriba. Un cuerpo tiene una estabilidad lineal cuando un pequeño desplazamiento lineal, en cualquier dirección, genera fuerzas de restablecimiento que tienden a retornarlo a su posición original. Tiene estabilidad rotacional cuando se genera un par restaurador por cualquier pequeño desplazamiento angular. Un cuerpo puede flotar en equilibrio estable, inestable o neutro. Cuando un cuerpo se encuentra en equilibrio inestable, cualquier pequeño desplazamiento angular genera un par que tiende a incrementar dicho desplazamiento. Si el cuerpo se encuentra en equilibrio neutral, cualquier pequeño desplazamiento angular no genera ningún par. 1) (a) Estable (b) Inestable (c) Neutro Un objeto completamente sumergido es rotacionalmente estable solamente cuando su centro de gravedad se encuentra por debajo del centro de boyamiento, tal como se muestra en la figura 2a. Cuando el objeto rota en el sentido contrario al de las agujas del reloj, como en la figura 2b, la fuerza de boyamiento y el peso producen un par en la dirección de las manecillas del reloj. 2)
-
Upload
adrianoso22 -
Category
Documents
-
view
38 -
download
0
Transcript of Altura Metacentrica

PRACTICAS DE HIDRAULICA I
ALTURA METACÉNTRICA
Berrezueta, J., Bolaños, S., Cárdenas, C., Moscoso, A.1. Introducción:
Estabilidad de cuerpos flotantes y sumergidos
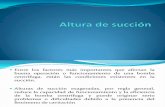
Un cuerpo que flota en un líquido estático tiene una estabilidad vertical. Un pequeño desplazamiento hacia arriba disminuye el volumen del líquido desplazado, lo cual da como resultado una fuerza no balanceada hacia abajo que tiende a retomar el cuerpo a su posición original. Similarmente, un pequeño desplazamiento hacia abajo genera una fuerza de boyamiento mayor, la cual causa un desbalance hacia arriba.
Un cuerpo tiene una estabilidad lineal cuando un pequeño desplazamiento lineal, en cualquier dirección, genera fuerzas de restablecimiento que tienden a retornarlo a su posición original. Tiene estabilidad rotacional cuando se genera un par restaurador por cualquier pequeño desplazamiento angular.
Un cuerpo puede flotar en equilibrio estable, inestable o neutro. Cuando un cuerpo se encuentra en equilibrio inestable, cualquier pequeño desplazamiento angular genera un par que tiende a incrementar dicho desplazamiento. Si el cuerpo se encuentra en equilibrio neutral, cualquier pequeño desplazamiento angular no genera ningún par.
1)
(a) Estable (b) Inestable (c) Neutro
Un objeto completamente sumergido es rotacionalmente estable solamente cuando su centro de gravedad se encuentra por debajo del centro de boyamiento, tal como se muestra en la figura 2a. Cuando el objeto rota en el sentido contrario al de las agujas del reloj, como en la figura 2b, la fuerza de boyamiento y el peso producen un par en la dirección de las manecillas del reloj.
2)
Normalmente, cuando un cuerpo es demasiado pesado para flotar, se hunde y baja hasta el fondo. A pesar de que el peso específico del líquido aumenta ligeramente con la profundidad, las altas presiones tienden a comprimir el cuerpo o hacen que el líquido penetre en los poros de sustancias sólidas y, por consiguiente, disminuye el

boyamiento del cuerpo. Por ejemplo, es seguro que un barco se hunda hasta el fondo una vez que se encuentre completamente sumergido, debido a la compresión del aire atrapado en sus diferentes partes.
Cualquier objeto flotante con su centro de gravedad por debajo de su centro de boyamiento (centroide del volumen desplazado) flota en equilibrio estable, tal como se muestra en la figura 1a. Sin embargo, ciertos objetos flotantes se encuentran en equilibrio cuando su centro de gravedad está por encima del centro de boyamiento. En primer lugar se considera la estabilidad de cuerpos prismáticos, seguida por un análisis de cuerpos flotantes generales para pequeños ángulos de inclinación.
3)
La figura 3a muestra la sección transversal de un cuerpo que tiene sus otras secciones transversales paralelas idénticas. El centro de boyamiento siempre es el centroide del volumen desplazado, el cual es el centroide del área de la sección transversal por debajo de la superficie líquida en este caso. Por consiguiente, cuando el cuerpo se inclina, como en la figura 3b, el centro de boyamiento está en el centroide B’ del trapezoide ABCD, la fuerza de boyamiento actúa hacia arriba a través de B' y el peso actúa hacia abajo a través de G, el centro de gravedad del cuerpo. Cuando la vertical que pasa a través de B' interseca la línea central original por encima de G, como en M, se produce un par restaurador; el cuerpo se encuentra en equilibrio estable. La intersección de la fuerza de boyamiento y la línea central se conoce como el metacentro, denominado M. Cuando M se encuentra por encima de G el cuerpo es estable. Cuando se encuentra por debajo de G es inestable; y cuando se encuentra en G, está en equilibrio neutral. La distancia MG se conoce como la altura metacéntrica y es una medida directa de la estabilidad del cuerpo. El par restaurador es :
W. MG Sen
en la cual es el desplazamiento angular y W es el peso el cuerpo.
Objetivos específicos
Determinar la altura metacéntrica de un cuerpo que se encuentra en equilibrio inestable. Comprobar que la altura metacéntrica esta arriba del centro de flotación por lo cual nuestro flotador
mantenía el equilibrio en el agua. Mientras la altura del pontón crece desde la base el volumen desplazado es menor. Investigar la validez de las formulas relativas a la posición del metacentro de un cuerpo flotante.
2. Materiales y métodos
Materiales: Flotador (Lo: (34.9 cm), B: (19.9 cm), h: (7.5 cm)) Balanza Pecera Regla

3. Procedimiento:
Localización del centro de gravedad:
1. Para determinar la reacción en la punta del mástil sobre la balanza, colocamos un tope debajo del flotador que medido desde la base hasta este punto será la distancia a.
2. Para calcular la reacción que se ejerce en el punto B, colocamos la punta del flotador sobre el centro de la balanza.
3. Variamos la posición del pontón desde la base a una distancia de 2cm (0cm, 2cm, 4cm, 6cm, 8cm) para en cada una de estas posiciones calcular la reacción que se ejerce sobre la balanza.
4. Mida la reacción existente en la balanza para varias distancias de la masa deslizante del mástil desde la posición más baja. Tomando momentos determine la distancia X del centro de gravedad del pontón, desde la base para cada posición de la más deslizante.
∑ M 0=0
R 2 (L−a )=Ry 1
y=R 2 (L−a )
R+a
Localización del metacentro por medio de la cupla.
1. Pese la masa deslizante transversal. 2. Realice el proceso que se detalla a continuación para varias distancias “y” de la masa deslizante vertical,
desde su posición mas baja.3. Flote el pontón y mueva la masa transversal. 4. Anote la correspondiente distancia “x” en la escala lineal (preferible cada centímetro). 5. Cuando el pontón este quieto, lea el ángulo del hilo (Ɵ) en la escala de grados. 6. Mueva la masa transversal cada centímetro y tome lecturas de “x” y Ɵ, cada vez.

4. Resultados y Discusión.
DATOS GENERALE
S
R(gr) 1414
L(cm) 35
h(cm) 7.5
B(cm) 20
a1(cm) 2.2
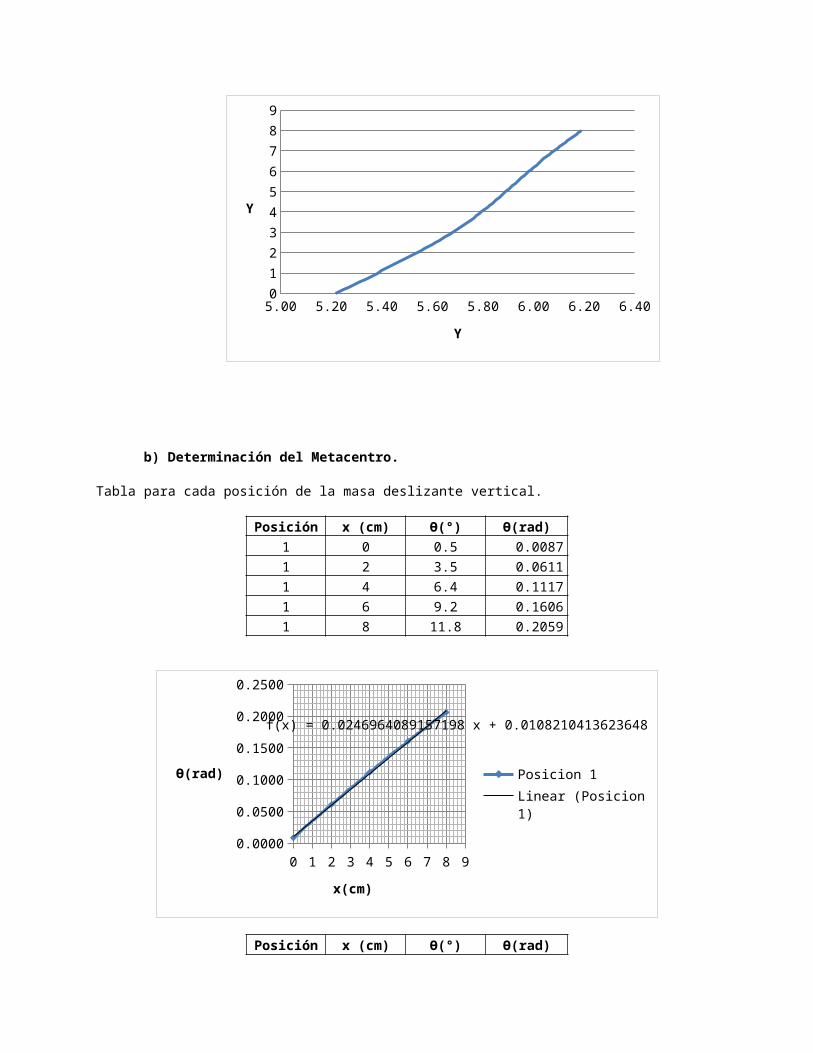
a) Determinación del centro de gravedad.
Utilizando:
y=R 2 (L−a )
R+a
Obtenemos:
Posición y(cm) R2(gr) ȳ(cm)
1 0 130 5.22
2 2 144 5.54
3 4 155 5.80
4 6 163 5.98
5 8 172 6.19
Curva Y-Ῡ
5.00 5.20 5.40 5.60 5.80 6.00 6.20 6.400
1
2
3
4
5
6
7
8
9
Y
Y

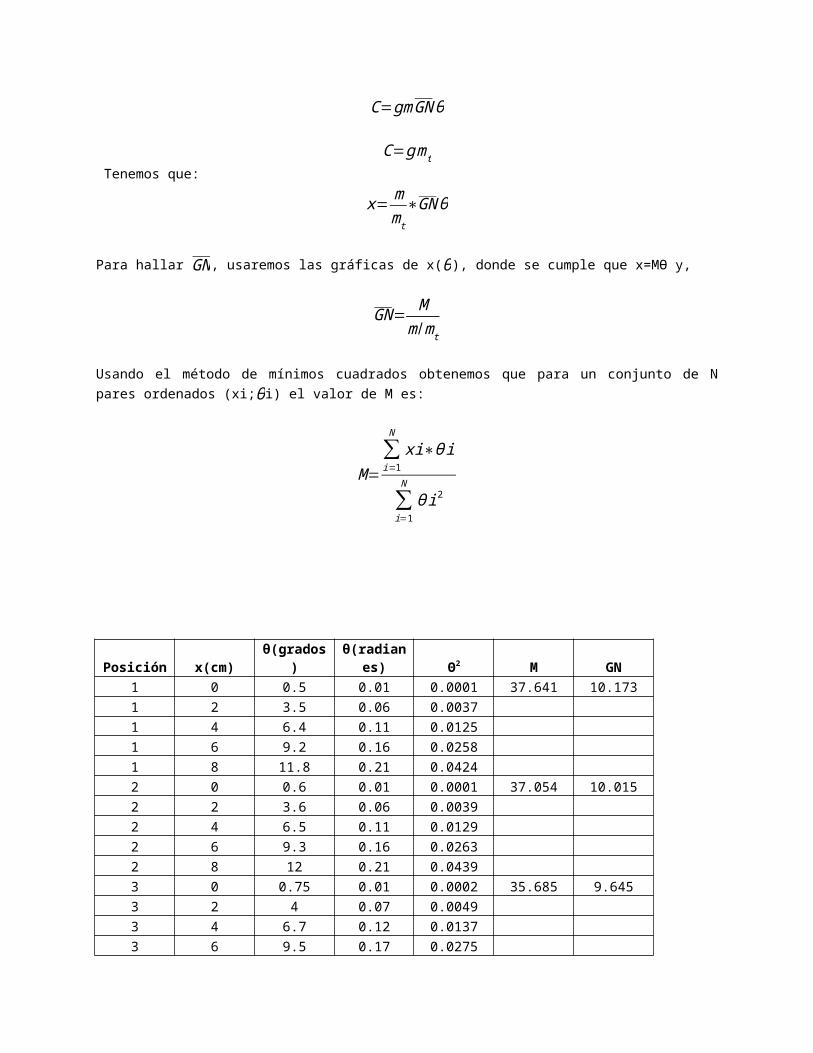
b) Determinación del Metacentro.
Tabla para cada posición de la masa deslizante vertical.
Posición x (cm) Ɵ(°) Ɵ(rad)
1 0 0.5 0.0087
1 2 3.5 0.0611
1 4 6.4 0.1117
1 6 9.2 0.1606
1 8 11.8 0.2059
0 1 2 3 4 5 6 7 8 90.0000
0.0500
0.1000
0.1500
0.2000
0.2500
f(x) = 0.0246964089157198 x + 0.0108210413623648
Posicion 1Linear (Posicion 1)
x(cm)
Ɵ(rad)
Posición x (cm) Ɵ(°) Ɵ(rad)
2 0 0.6 0.0105
2 2 3.6 0.0628
2 4 6.5 0.1134
2 6 9.3 0.1623
2 8 12 0.2094
0 1 2 3 4 5 6 7 8 90.0000
0.0500
0.1000
0.1500
0.2000
0.2500
f(x) = 0.0248709418409193 x + 0.0122173047639602
Posicion 2Linear (Posicion 2)
x(cm)
Ɵ(rad)
Posición x (cm) Ɵ(°) Ɵ(rad)
3 0 0.75 0.0131
3 2 4 0.0698
3 4 6.7 0.1169
3 6 9.5 0.1658
3 8 12.5 0.2182
0 1 2 3 4 5 6 7 8 90.0000
0.0500
0.1000
0.1500
0.2000
0.2500
f(x) = 0.0253072741539177 x + 0.0155334303427496
Posicion 3Linear (Posicion 3)
x(cm)
Ɵ(rad)
Posición x (cm) Ɵ(°) Ɵ(rad)
4 0 0.9 0.0157
4 2 3.9 0.0681
4 4 6.9 0.1204
4 6 9.8 0.1710
4 8 12.7 0.2217

0 1 2 3 4 5 6 7 8 90.0000
0.0500
0.1000
0.1500
0.2000
0.2500
f(x) = 0.0257436064669164 x + 0.0164060949687467
Posicion 4Linear (Posicion 4)
x(cm)
Ɵ(rad)
Posición x (cm) Ɵ(°) Ɵ(rad)
5 0 0.9 0.0157
5 2 4 0.0698
5 4 7.25 0.1265
5 6 10.25 0.1789
5 8 13.4 0.2339
0 1 2 3 4 5 6 7 8 90.0000
0.0500
0.1000
0.1500
0.2000
0.2500
f(x) = 0.0257436064669164 x + 0.0164060949687467
Posicion 5Linear (Posicion 5)
x(cm)
Ɵ(rad)
Ya que:C=gmGN θ
C=g mt
Tenemos que:
x= mmt
∗GN θ

Para hallar GN , usaremos las gráficas de x(θ), donde se cumple que x=MƟ y,
GN= Mm /mt
Usando el método de mínimos cuadrados obtenemos que para un conjunto de N pares ordenados (xi;θi) el valor de M es:
M=∑i=1
N
xi∗θ i
∑i=1
N
θ i2
Posición x(cm) θ(grados) θ(radianes) Θ2 M GN
1 0 0.5 0.01 0.0001 37.641 10.173
1 2 3.5 0.06 0.0037
1 4 6.4 0.11 0.0125
1 6 9.2 0.16 0.0258
1 8 11.8 0.21 0.0424
2 0 0.6 0.01 0.0001 37.054 10.015
2 2 3.6 0.06 0.0039
2 4 6.5 0.11 0.0129
2 6 9.3 0.16 0.0263
2 8 12 0.21 0.0439
3 0 0.75 0.01 0.0002 35.685 9.645
3 2 4 0.07 0.0049
3 4 6.7 0.12 0.0137
3 6 9.5 0.17 0.0275
3 8 12.5 0.22 0.0476
4 0 0.9 0.02 0.0002 34.953 9.447
4 2 3.9 0.07 0.0046
4 4 6.9 0.12 0.0145
4 6 9.8 0.17 0.0293
4 8 12.7 0.22 0.0491
5 0 0.9 0.02 0.0002 33.294 8.998
5 2 4 0.07 0.0049
5 4 7.25 0.13 0.0160
5 6 10.25 0.18 0.0320
5 8 13.4 0.23 0.0547
c) Distancia del metacentro a la base del flotador
Las dimensiones del flotador son: ancho 19.9 cm., largo 34.9 cm., y profundidad: 7.5 cm.Deducir la profundidad de inmersión en el agua del flotador:
hb=m
ρ∗A= 1,414
1000∗0,199∗0,349=2,04 cm
Por la razón que el centro de flotación esta ubicado en el centroide del volumen de agua desplazado, tenemos:
yb=hb
2=1,02cm
Además el momento de inercia de la superficie de flotación será:
I=b∗h3
12=34.9∗19.93
12=22919.4 cm4
Luego la distancia del metacentro a la base del flotador es:
HT= yb+IV
=1,02+ 22919.42,02∗35∗20
=17.22 cm
Por lo tanto HT = 17.21 cm
5. Conclusiones:
1. La posición del metacentro, nos resulta un valor positivo, por lo tanto nos indica de forma clara que el flotador esta en equilibrio estable y sobre todo que la posición metacéntrica no depende del centro de gravedad debido a que esta dentro de un rango pequeño de variación, así mismo se encuentra debajo del centro de flotación.
2. La variación de la altura metacéntrica con el ángulo de inclinación, esta dentro de un rango de 8.998 a
10.173, la cual es pequeña, por lo que además de la dificultad de apreciación de las diferentes lecturas
en la escala angular del pontón, debemos concluir que la altura metacéntrica permanecerá invariable
con la manipulación de los ángulos de inclinación.
3. En los procedimientos utilizados la mejor confianza se sitúa determinando la posición del metacentro
debido a que utilizamos tan solo los datos iniciales, por el contrario al usar el procedimiento
determinando la altura metacéntrica existe el problema en la apreciación de los ángulos en su
respectiva escala, y, tanto en la manipulación como colocación de las masas deslizantes.
6. Referencias:Streeter, V. L. & Wyle, E. B., 1988. Mecanica de los Fluidos. s.l.:McGRAW-HILL.
http://www.tecnoedu.com/Armfield/F1-14.php