Automatizaci´on de Procesos/Sistemas de...
30
Automatizaci´onde Procesos/Sistemas de Control Ing. Biom´ edica e Ing. Electr´ onica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Agosto-Diciembre/2019 1
Transcript of Automatizaci´on de Procesos/Sistemas de...

Automatizacion de
Procesos/Sistemas de
Control
Ing. Biomedica e Ing.
Electronica
Capitulo V
Controladores PID
D.U. Campos-Delgado
Facultad de Ciencias
UASLP
Agosto-Diciembre/2019
1

CONTENIDO
Motivacion
Estructura General
Filosofıa de Control
Sintonizacion Experimental
Sintonizacion Analıtica
2

Motivacion
En la actualidad la mayorıa de los controla-
dores que se utilizan en la industrıa siguen
la estructura PID.
El significado de PID viene del tipo de reac-
cion al error que afecta la senal de control o
variable manipulada: (P) Proporcional, (I)
Integral y (D) Derivativa.
Este tipo de control es sumamente robusto
para la mayorıa de las aplicaciones practi-
cas, sobretodo en aquellas cuya dinamica
no es rapida y de alto orden.
3

Estructura General
• El control PID utiliza como mecanismo mo-
tor al error de seguimiento, es decir
e(t) = r(t)− y(t)
donde r(t) representa la referencia y y(t) la
variable controlada o salida.
• De esta la accion de control se construye
segun la siguiente estructura basica
u(t) = Kp e(t)︸ ︷︷ ︸
Proporcional
+Ki
∫ t
0e(τ)dτ
︸ ︷︷ ︸
Integral
+ Kdde(t)
dt︸ ︷︷ ︸
Derivativa
donde Kp, Ki, Kd representan las ganancias
proporcional, integral y derivativa, respectiva-
mente.
• Por lo que para definir el controlador PID solo
se tienen que asignar las ganancias (Kp,Ki,Kd)
tal que se garantiza estabilidad y desempeno,
tanto transitorio como en estado estacionario.
4

• El controlador PID tambien puede escribirse
en un formato de funcion de transferencia
CPID(s) =U(s)
E(s)= Kp +
Ki
s+Kds.
• En una implementacion, la salida o variable
controlada puede verse afectada por ruido y en
este caso, la accion derivativa amplificara este
factor.
• Por lo que es comun agregar un filtro de

primer orden en la accion deirvativa, es decir
CPID(s) =U(s)
E(s)= Kp +
Ki
s+
Kds
τds+1,
de esta manera se tendrıan ahora 5 parametros
de sintonizacion (Kp,Ki,Kd, τd).
• En ocaciones, se acostumbra definir el parame-
tro τd en funcion del valor de la ganancia deri-
vativa, como
0.1Kd
Kp≤ τd ≤ 0.2
Kd
Kp
• Tambien se puede optar por controladores

solo P, PI o PD
CP (s) = Kp
CPI(s) = Kp +Ki
s
CPD(s) = Kp +Kds
τds+1
segun requiera la aplicacion.
• Otra forma comun de representar el controla-
dor PID es considerando el tiempo de reset Tr,
el tiempo derivativo Td y una ganancia general
K de control:
CPID(s) =U(s)
E(s)= K
(
1+1
Tr·1
s+
Tds
τds+1
)
.

Filosofıa de Control
Accion Proporcional: provee una contri-
bucion en la accion de control que depende
del valor instantaneo del error. Un controla-
dor proporcional puede controlar cualquier
planta estable, pero su desempeno es li-
mitado y el error de estado estable no se
garantiza que llegue a cero.
Accion Integral: proporciona una salida
que es proporcional al error acumulado, lo
que implica que la estrategia de control es
de lenta reaccion. El error de estado esta-
ble se garantiza que sea cero en la presen-
cia de escalones unitarios de referencia y
perturbaciones.
Accion Derivativa: contribucion propor-
cional a la tasa de cambio del error de refe-
rencia, de modo que es un control de rapida
5

reaccion, aunque desaparece en presencia
de errores constantes. Su implementacion
requiere de anadir un filtro pasa-bajos para
reducir el efecto adverso del ruido.
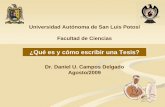
Enseguida se muestran 3 escenarios asociados
con diferentes senales de error, y se muestran
los 3 tipos de accion: Proporcional, Integral y
Derivativa.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.2
0.4
0.6
0.8
1
e(t
) (E
rro
r)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−5
0
5
Accio
ne
s d
e C
on
tro
l
Kp=K
d=K
i=2.0
Acción Proporcional
Acción Integral
Acción Derivativa

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.5
1
1.5
2
2.5
3
e(t
) (E
rror)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
−8
−6
−4
−2
0
2
4
6
8
Accio
nes d
e C
ontr
ol
Kp=K
d=K
i=2.0
Acción Integral
Acción Derivativa
Acción Proporcional

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−1
−0.5
0
0.5
1
e(t
) (E
rror)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−6
−4
−2
0
2
4
6
Accio
nes d
e C
ontr
ol
Kp=K
d=K
i=2.0
Acción IntegralAcción Derivativa
Acción Proporcional
• Para encontrar los valores apropiados de las
ganancias (Kp,Ki,Kd) que garanticen estabi-
lidad y desempeno (sintonizacion) se necesita
recabar informacion del proceso a controlar.
• Se pueden emplear dos filosofıas:
Sintonizacion Experimental: medir la sali-
da del proceso a ciertas entradas prototi-

po para calcular parametros de la repuesta
dinamica, y con base a estos valores deter-
minar los valores apropiados de las ganan-
cias de control.
Sintonizacion Analıtica: utilizar el modelo
matematico del proceso o planta, y consi-
derando la estructura del controlador cal-
cular la funcion de transferencia de lazo
cerrado, encontrar las ganancias que man-
tengan estable el sistema retroalimentado,
y desempeno transitorio y de estado esta-
ble.

Sintonizacion Experimental
• La estrategia mas utilizada se basa en la
metodologıa de Ziegler-Nichols, donde se asu-
me que la planta puede representarse por la
siguiente estructura:
G(s) =Y (s)
U(s)=
He−tds
τs+1.
• Enseguida se evalua la respuesta al escalon
unitario de la planta y se miden los parametros
L = td
R =H
τ.
6

• Las ganancias de control se calculan para
obtener un amortiguamiento en lazo cerrado
de ζ = 0.21.
Controlador Ganancias
P Kp = 1R L
PI Kp = 0.9R L,Ki =
0.27R L2
PID Kp = 1.2R L,Ki =
0.6R L2,Kd = 0.6
R
• Una estrategia alternativa es utilizar el meto-
do de la Ganancia Ultima, en la cual se coloca
a la planta bajo un control proporcional K, y
se aumenta la ganancia K hasta que el sistema
retroalimentado entra en oscilacion.

• La ganancia que provoca el regimen osci-latorio se le denomina como Ku y el periodoresultante como Pu.
• Las ganancias del controlador PID o sus va-riantes estarıan dadas por
Controlador Ganancias
P Kp = 12Ku
PI Kp = 0.45Ku,Ki = 0.54KuPu
PID Kp = 0.6Ku,Ki = 1.2KuPu
,
Kd = 0.075KuPu
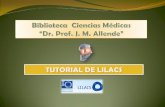
Ejemplo: suponer que la respuesta al escalonde un proceso quımico esta dada por la siguien-te figura. Encontrar el modelo aproximado delproceso y las ganancias para los controladoresP, PI y PID.

Sintonizacion Analıtica
• Con este fin se emplea el modelo matematico
del sistem LIT, y se define el comportamien-
to deseado para la respuesta transitoria y de
estado estacionario en lazo cerrado.
• Las restricciones en la respuesta transitoria
se traducen la ubicacion deseada de los polos
dominantes de lazo cerrado.
• Durante el diseno es posible cancelar un polo
estable con dinamica lenta de la planta con un
cero del controlador (cancelacion polo-cero).
• Los requisitos en la respuesta estacionaria
definiran restriciones en las ganancias del con-
trolador.
• Si se requiere cero error en estado estaciona-
rio ante escalones de referencia o perturbacion
se necesitan de accion integral en el controla-
dor ⇒ PI o PID.
7

Ejemplo 1: considerar el modelo de un motor
CD
G(s) =800
(s+4)(s+15),
disenar un controlador PI
C(s) = Kp +Ki
s
tal que se garantice
Error de estado estable cero ante escalones
de referencia, i.e. ess = 0,
Error de estado estable menor o igual a 1
para una referencia rampa, i.e. esr ≤ 1,
Sobretiro menor o igual al 5%, i.e. Mp ≤
5%,
Tiempo de asentamiento menor o igual a
1 seg, i.e. ts ≤ 1 seg.

Solucion: primero observar que la planta en la-
zo abierto G(s) tiene 2 polos estables en s =
−4 (polo lento) y s = −15, pero ningun cero.
Ahora, el controlador PI puede escribirse como
C(s) = Kp(s+Ki/Kp)
s,
que tiene un polo en s = 0 (accion integral) y
un cero en s = −Ki/Kp. Por lo que se propone
cancelar el polo lento de la planta con el cero
del controlador, es decir se define
Ki
Kp= 4.
De esta manera, la planta en lazo abierto es-
tarıa dada por
L(s) = C(s)G(s) = Kp(s+4)
s·
800
(s+4)(s+15)
=800Kp
s(s+15).
Debido a la accion integral del controlador PI
se cumple automaticamente ess = 0, y recordar
que
esr =1
lıms=0 sL(s)≤ 1

∴ lıms=0
sL(s) ≥ 1
Ya que se tiene que
lıms=0
sL(s) = lıms=0
s ·800Kp
s(s+15)=
800Kp
15
se necesita
Kp ≥15
800= 0.0187
Por otro lado, de la condicion de sobretiro Mp ≤0.05 se obtiene una restriccion para el amorti-guamiento en lazo cerrado
ζ ≥
√√√√ (ln 0.05)2
π2 + (ln 0.05)2= 0.69
Enseguida, la funcion de transferencia de lazocerrado estarıa dada por
H(s) =Y (s)
R(s)=
L(s)
1 + L(s)=
800Kp
s2 +15s+800Kp
al comparar con el prototipo de 2do orden seobtiene
ω2n = 800Kp
2ζωn = 15
⇒ ζ =15
2√
800Kp
≥ 0.69

y se concluye que
Kp ≤1
2
(15
40 · 0.69
)2
= 0.1477
Ademas como ζωn = 7.5, se satisface la res-
triccion
ts =3.91
ζωn= 0.52 ≤ 1.
Finalmente, al conjuntar las condiciones de es-
tado estacionario y respuesta transitoria para
Kp se deduce el intervalo de variacion:
0.0187 ≤ Kp ≤ 0.1477
Por ejemplo, se puede tomar Kp = 0.1 y en
consecuencia Ki = 0.4, es decir el controlador
final es
C(s) = 0.1 +0.4
s.

Sintonizacion Analıtica
Ejemplo 2: considerar la siguiente planta
G(s) =6× 103
[(s+6)2 +144](s+12)
disenar un controlador PID
C(s) = Kp +Ki
s+Kds
tal que se satisfaga en lazo cerrado
Error de estado estable cero para un es-
calon de referencia, i.e. ess = 0,
Error de estado estable menor o igual a 0.1
para una rampa de referencia, i.e. esr ≤ 0.1,
Sobretiro menor o igual a 15%, i.e. Mp ≤
15%.
8

Solucion: primero observar que la funcion de
transferencia del controlador PID puede re-escribirse
como
C(s) = Kd[s2 + (Kp/Kd)s+ (Ki/Kd)]
s,
es decir el controlador posee un par de ceros y
un polo en el origen. Por otro lado, la planta
G(s) posee un polos en s = −6 ± j12 (polos
lentos) y s = −12.
De esta manera, se propone cancelar los po-
los complejos conjugados de la planta con los
ceros del controlador PID, es decir
s2 + (Kp/Kd)s+ (Ki/Kd) = (s+6)2 +144
⇒Kp
Kd= 12,
Ki
Kd= 180.
Enseguida se observa que la funcion de trans-
ferencia de lazo abierto estarıa dada por
L(s) = Kd(s+6)2 +144
s·
6× 103
[(s+6)2 +144](s+12)
=6× 103Kd
s(s+12)

es decir L(s) tiene un polo en el origen y en
consecuencia ess = 0, el error de estado estable
ante una rampa
esr =1
lıms=0 sL(s)≤ 0.1
∴ lıms=0
sL(s) ≥ 10
Ya que se tiene que
lıms=0
sL(s) = lıms=0
s ·6× 103Kd
s(s+12)=
6× 103Kd
12
se necesita
Kd ≥12
6× 102= 0.02
Por otro lado, la condicion de sobretiro estable-
ce que Mp ≤ 0.15, lo que define una restriccion
para el amortiguamiento en lazo cerrado
ζ ≥
√√√√ (ln 0.15)2
π2 + (ln 0.15)2= 0.52
Por otro lado, la funcion de transferencia de
lazo cerrado estarıa dada por
H(s) =Y (s)
R(s)=
L(s)
1 + L(s)=
6× 103Kd
s2 +12s+6× 103Kd

al comparar con el prototipo de 2do orden se
obtiene
ω2n = 6× 103Kd
2ζωn = 12
⇒ ζ =6
√
6× 103Kd
≥ 0.52
y se concluye que
Kd ≤1
6× 103
(6
0.52
)2
= 0.022
Finalmente, al conjuntar las condiciones de es-
tado estacionario y respuesta transitoria para
Kd se deduce el intervalo de variacion:
0.02 ≤ Kd ≤ 0.022.
Por ejemplo se puede tomar Kd = 0.021, y el
controlador resultante serıa
C(s) = 0.252 +3.78
s+0.021s

Sintonizacion Analıtica
• De forma alternativa, si solo se coloca interes
en la estabilidad de lazo cerrado, se puede utili-
zar el criterio de Routh-Hurwitz para encontrar
el rango de variacion permitido para las ganan-
cias del controlador P, PI o PID.
Ejemplo 1: considerar la siguiente planta
G(s) =(s+1)
s(s− 1)(s+6)
obtener el rango de valores para un controla-
dor proporcional Kp que mantegan estable el
sistema retroalimentado.
Solucion: primero observar que G(s) tiene po-
los en s = 0, s = 1 (polos inestables) y s = −6,
y un cero en s = −1. Ahora, la funcion de
9

transferencia de lazo cerrado esta dada por
H(s) =Y (s)
R(s)=
Kp(s+1)
s(s−1)(s+6)
1+Kp(s+1)
s(s−1)(s+6)
=Kp(s+1)
s(s− 1)(s+6)+Kp(s+1)
=Kp(s+1)
s3 +5s2 + (Kp − 6)s+Kp.
Enseguida se analizan las raıces del polinomio
denominador
s3 +5s2 + (Kp − 6)s+Kp = 0
por el Criterio de Routh-Hurwitz.
s3 1 Kp − 6
s2 5 Kp
s1 15(4Kp − 30) 0
s0 Kp 0
Por lo que para evitar cambios de signo en la
primera columna del arreglo se necesita
1
5(4Kp − 30) > 0 & Kp > 0

es decir para mantener estabilidad se requiere
Kp >30
4= 7.5
Ejemplo 2: considerar la siguiente planta
G(s) =1
(s+1)(s+2)
obtener el rango de valores para las ganancias
de un controlador PI (Kp,Ki) que mantegan
estable el sistema retroalimentado
C(s) = Kp +Ki
s=
Kp s+Ki
s
Solucion: observar que G(s) tiene polos en s =
−1 y s = −2 (polos estables) y no tiene ceros, y
la accion integral del controlador PI garantizara
ess = 0. La funcion de transferencia de lazo

cerrado esta dada por
H(s) =Y (s)
R(s)=
(
Kp +Kis
)1
(s+1)(s+2)
1 +(
Kp +Kis
)1
(s+1)(s+2)
=Kp s+Ki
s(s+1)(s+2)+ (Kp s+Ki)
=Kp s+Ki
s3 +3s2 + (2+Kp)s+Ki.
Enseguida se analizan las raıces del polinomio
denominador
s3 +3s2 + (2+Kp)s+Ki = 0
por el Criterio de Routh-Hurwitz.
s3 1 2+Kp
s2 3 Ki
s1 13(3Kp +6−Ki) 0
s0 Ki 0
Por lo que para evitar cambios de signo en la
primera columna del arreglo se necesita
1
3(3Kp +6−Ki) > 0 & Ki > 0

es decir
Ki < 3Kp +6 & Ki > 0
Si se considera el plano (Kp,Ki) estas condi-
ciones definen una region de estabilidad:
Ω = (Kp,Ki) | Ki < 3Kp +6 & Ki > 0

Tarea # 5
Resolver los siguientes problemas del libro detexto (Ingenierıa de Control Moderna, K. Oga-ta, 4a Edicion, Prentice Hall):
B.10.1
B.10.3
B.10.4
B.10.5
B.10.11
10