Cap-4-y-10
37
Capítulo 4 Deformación (Mecánica) Deformación en mecánica continua es la transformación de un cuerpo de una configuración de referencia a una configuración corriente. Una configuración es un conjunto que contiene las posiciones de todas las partículas del cuerpo. Contrario a la definición común de deformación, que implica distorsión o cambio de forma, la definición de la mecánica continua incluye movimientos de cuerpo rígido donde cambios de forma no ocurren. (Nota 4, p. 48). La causa de la deformación no es pertinente a la definición del término. Sin embargo, se puede suponer que la deformación es causada por cargas externas, fuerzas de cuerpo (como la gravedad o fuerzas electromagnéticas), o cambios de temperatura dentro del cuerpo. La deformación es una descripción en términos de desplazamiento relativo de partículas en el cuerpo. Diferentes opciones equivalentes pueden hacerse para la expresión de un campo de deformación en función de si se define en la inicial o en la colocación final y de si se considera el tensor métrico o su dual. En un cuerpo continuo, un campo de deformación resulta de un campo de tensión inducido por fuerzas aplicadas o es debido a cambios en el campo de temperatura dentro del cuerpo. La relación entre tensiones y tensiones inducidas es expresada por ecuaciones constitutivas, por ejemplo, la ley de Hooke para materiales elásticos lineales. Deformaciones que son recuperadas después del campo de tensión ha sido quitado se llaman deformaciones elásticas. En este caso, el continuo recupera su configuración original completamente. De otro lado, deformaciones irreversibles se quedan mismo después tensiones ha sido quitado. Un tipo de deformación irreversible es deformación plástica, que ocurre en
-
Upload
susana-montero -
Category
Documents
-
view
217 -
download
0
description
capitulo
Transcript of Cap-4-y-10
Capítulo 4
Deformación (Mecánica)
Deformación en mecánica continua es la transformación de un cuerpo de una configuración de referencia a una configuración corriente. Una configuración es un conjunto que contiene las posiciones de todas las partículas del cuerpo. Contrario a la definición común de deformación, que implica distorsión o cambio de forma, la definición de la mecánica continua incluye movimientos de cuerpo rígido donde cambios de forma no ocurren.
(Nota 4, p. 48).
La causa de la deformación no es pertinente a la definición del término. Sin embargo, se puede suponer que la deformación es causada por cargas externas, fuerzas de cuerpo (como la gravedad o fuerzas electromagnéticas), o cambios de temperatura dentro del cuerpo.
La deformación es una descripción en términos de desplazamiento relativo de partículas en el cuerpo.
Diferentes opciones equivalentes pueden hacerse para la expresión de un campo de deformación en función de si se define en la inicial o en la colocación final y de si se considera el tensor métrico o su dual.
En un cuerpo continuo, un campo de deformación resulta de un campo de tensión inducido por fuerzas aplicadas o es debido a cambios en el campo de temperatura dentro del cuerpo. La relación entre tensiones y tensiones inducidas es expresada por ecuaciones constitutivas, por ejemplo, la ley de Hooke para materiales elásticos lineales. Deformaciones que son recuperadas después del campo de tensión ha sido quitado se llaman deformaciones elásticas. En este caso, el continuo recupera su configuración original completamente. De otro lado, deformaciones irreversibles se quedan mismo después tensiones ha sido quitado. Un tipo de deformación irreversible es deformación plástica, que ocurre en cuerpos materiales después de las tensiones ha conseguido un cierto valor de umbral conocido como el limite elástico o tensión de sometimiento, y son el resultado de mecanismos de dislocación al nivel atómico. Otro tipo de deformación irreversible es deformación viscosa, que es la parte irreversible de la deformación visco elástica.
En el caso de deformaciones elásticas, la función de respuesta conectando tensión a la tensión deformante es el tensor de cumplimiento del material.
Tensión
Una distorsión es una medida normalizada de deformación que representa el desplazamiento entre partículas en el cuerpo relativo a la longitud de referencia.
Una deformación general de un cuerpo se puede expresar en la forma: donde X es la posición de referencia de puntos de material en el cuerpo. Una tal medida no distingue entre movimientos de cuerpo rígido (translaciones y rotaciones) y cambios de forma (y tamaño) del cuerpo. Una deformación tiene unidades de longitud.
Podríamos, por ejemplo, definir la tensión como:
Por lo tanto, tensiones son sin dimensiones y normalmente se expresan como una fracción decimal, un porcentaje o en partes por millón. Las tensiones se miden la cantidad de una deformación dada es distinta localmente de una deformación de cuerpo rígido.
Una Tensión es, en general, una cantidad tensorial. Llegamos a comprender por observar que una deformación dada puede ser descompuesta en componentes normales y de corte. La cantidad de tensión o compresión a la longitud de un elemento material lineal o fibras es la tensión normal, y la cantidad de distorsión asociado con el deslizamiento de capas planas sobre la otra es el tensión de corte, dentro de un cuerpo deformante. Este podría ser aplicado por elongación, adortamiento, o cambios de volumen o distorsión angular.
El estado de tensiones de un punto del material de un cuerpo continuo es definido como la totalidad de todos los cambios en la longitud de material lineal o fibras, la tension normal, que pasa a través ese punto y también la totalidad de todos los cambios en el ángulo entre pares de líneas al principio perpendicular una a otra, la tensión de corte, radiante de este punto. Sin embargo, es suficiente saber los componentes normales y de corte de tensión en un conjunto de tres direcciones mutualmente perpendicular.
Si hay un aumento de longitud de la línea de material, la tensión normal se llama tensión de tracción, de lo contrario, si hay una reducción o compresión en la longitud de la línea de material, se llama tensión de compresión.
Medidas de deformación.
Dependiendo de la cantidad de tensión o deformación local, el análisis de la deformación se subdivide en tres teorías de deformación:
• Teoría de las deformaciones finitas, también llamada teoría de la deformación grande, gran teoría de la deformación, se ocupa de las deformaciones en el que ambas rotaciones y deformaciones son arbitrariamente grande. En este caso, las configuraciones no deformadas y deformadas del continuo son significantemente diferentes y se tiene que hacer una distinción clara entre ellos. Comúnmente, este es el caso con elastómeros, materiales que deforman plásticamente y otros fluidos y tejido biológico.
• Teoría de deformación infinitesimal (también llamado teoría de deformación pequeña, teoría de deformación pequeño, teoría de desplazamiento pequeño, o teoría de gradiente de desplazamiento pequeña) donde las deformaciones y rotaciones son ambos pequeños. En este caso, las configuraciones no deformadas y deformadas del cuerpo se pueden suponer idénticos. La teoría de deformación infinitesimal es usada en el análisis de deformaciones de materiales que muestran comportamiento elástico, como materiales encontrados en aplicaciones de ingeniería mecánica y civil, por ejemplo, concretos y acero.
• Teoría de desplazamiento grande o teoría de rotación grande, que supone deformaciones pequeñas pero rotaciones grandes y desplazamientos.
En cada una de estas teorías el deformación es definido diferentemente. La deformacion en la ingeniería es la definición más común aplicada a materiales usado en ingeniería mecánica y estructural, cuales se somete a deformaciones muy pequeños. De otro lado, para algunos materiales, por ejemplo, elastómeros y polímeros, se somete a deformaciones grandes, la definición ingeniería de deformaciones no es aplicable, por ejemplo deformaciones típicas más grande que 1%, así otras definiciones de deformación más complejas se necesita, como estiramiento, la tensión logarítmica, la tensión de verde, la tensión y de Almansi.
Deformación
La deformación de Cauchy o se expresa como la proporción de deformación total a la dimensión inicial del cuerpo material en cual las fuerzas se aplican. La tensión o extensional ingeniería deformación normal de ingeniería, o nominal deformación E de un elemento de línea de material o fibra cargado axialmente se expresa como el cambio en la longitud Delta L por unidad de la longitud L original del elemento de línea o fibras. La tensión normal es positivo si las fibras de material se estiran o negativo si están comprimidos. Por lo tanto, tenemos
Donde (e) es la deformación norma, L es la longitud original de la fibra y es la longitud final de la fibra.
La deformación por esfuerzo cortante se define como el cambio del ángulo entre dos elementos materiales lineales al principio perpendicular a un a otro en la configuración no deformada o inicial.
Relación de estiramiento
La proporción de estiramiento o proporción de extensión es una medida del extensional o normal de deformación de un elemento diferencial lineal, que se puede definir o a la configuración no deformada o a la configuración deformada. Se define como la proporción entre la última longitud ℓ y la longitud inicial L de la material lineal.
La proporción de extensión se relaciona la deformación por:
Esta ecuación implica que la deformación normal es cero, para que no haya deformación cuando el estiramiento está igual a la unidad.
La proporción de extensión es usada en el análisis de materiales que muestran deformaciones grandes, como elastómeros, que pueden tolerar proporciones de estiramiento de 3 o 4 antes de fallar. De otro lado, materiales de ingeniería tradicionales, como el concreto o acero, fallar a proporciones de elongación mucho más bajos.
La verdadera deformación
El ε deformación logarítmica, también llamada deformación natural, cierto esfuerzo o deformación de Hencky. Teniendo en cuenta una cepa incrementales (Ludwik)
La deformación logarítmica se obtiene por integrar este deformación incremental:

Donde e es la deformación. La deformación logarítmica da la medida correcta del último la última deformación cuando esta deformación ocurre en una serie de incrementos, tomando en cuenta la influencia de la trayectoria de la información.
Deformación de Green
La Deformación de Green es definido como:
Deformación de Almansi
La Deformación Euler-Almansi es definido como:
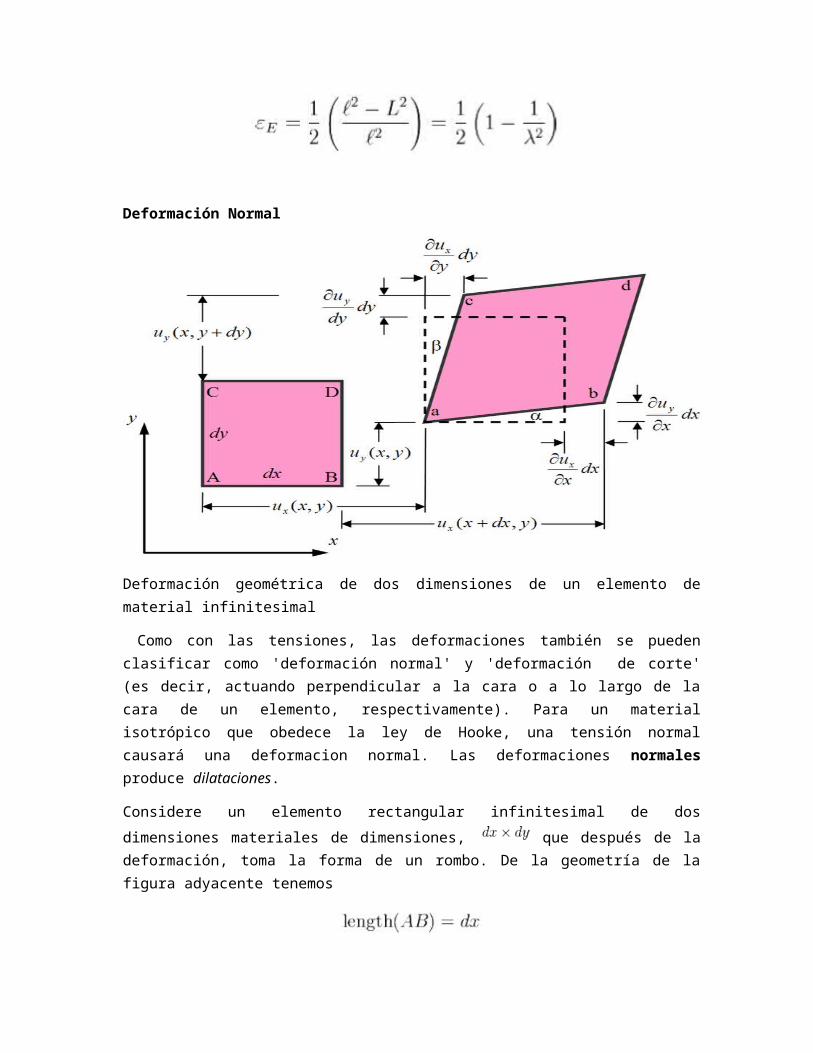
Deformación Normal
Deformación geométrica de dos dimensiones de un elemento de material infinitesimal

Como con las tensiones, las deformaciones también se pueden clasificar como 'deformación normal' y 'deformación de corte' (es decir, actuando perpendicular a la cara o a lo largo de la cara de un elemento, respectivamente). Para un material isotrópico que obedece la ley de Hooke, una tensión normal causará una deformacion normal. Las deformaciones normales produce dilataciones.
Considere un elemento rectangular infinitesimal de dos dimensiones materiales de dimensiones,
que después de la deformación, toma la forma de un rombo. De la geometría de la figura adyacente tenemos
Y
Por muy pequeño desplazamiento gradientes los cuadrados de los derivados son insignificantes y que tenemos
La deformaciones normales en la dirección x del elemento rectangular se define por
Del mismo modo, Las deformaciones normales en la dirección x, y, se convierte
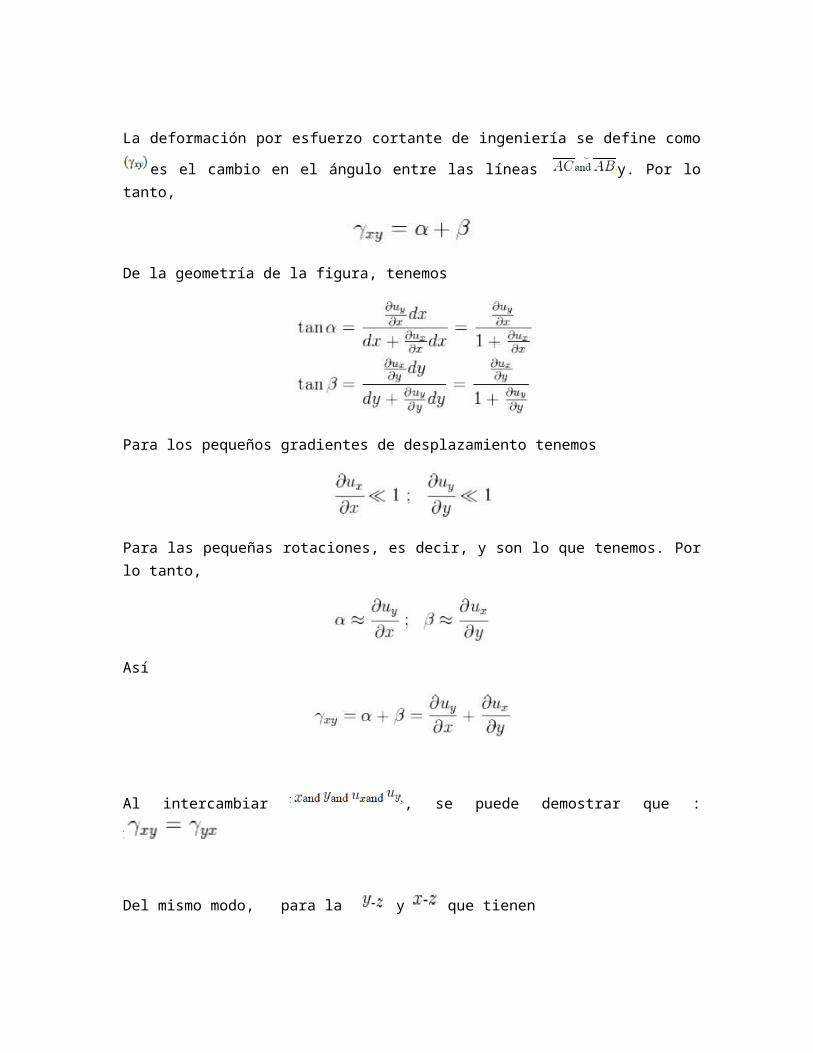
Deformación por cortante
La deformación por esfuerzo cortante de ingeniería se define como es el cambio en el
ángulo entre las líneas y. Por lo tanto,
De la geometría de la figura, tenemos
Para los pequeños gradientes de desplazamiento tenemos
Para las pequeñas rotaciones, es decir, y son lo que tenemos. Por lo tanto,
Así
Al intercambiar , se puede demostrar que :
Del mismo modo, para la y que tienen

Los componentes de la deformación cortante tensoriales del tensor de deformación infinitesimal entonces pueden expresarse utilizando la definición deformación de, , como
Tensor Métrico
Un campo de deformaciones asociado con un desplazamiento es definido, a cualquier punto, por el cambia de longitud de los vectores tangentes que representan las velocidades de curvas arbitrariamente parametrizada que pasan a través de ese punto.
Un resultado geométrico básico, debido a Fréchet, von Neumann y Jordan, declara que, si las longitudes de los vectores tangentes cumplen los axiomas de un normal y la ley del paralelogramo, entonces la longitud de un vector es la raíz cuadrada del valor de la forma cuadrática asociado, por la fórmula de polarización, con un mapa definido positivo bilineal llamado el tensor métrico.
Descripción de la deformación
Deformación es el cambio en las propiedades métricas de un cuerpo continuo, que significa que una curva trazada en la ubicación de cuerpo inicial cambia su longitud cuando desplazado a una curva en la ubicación última. Si ninguna de las curvas cambia sus longitudes, es dicho que un desplazamiento de cuerpo rígido ocurrió.
Es conveniente identificar una configuración de referencia o estado geométrico inicial del cuerpo continuo de que todas las configuraciones posteriores se refieren. La configuración de referencia no necesita ser una que el cuerpo de verdad ocupará. Muchas veces, la configuración a t = 0 es considerado la configuración de referencia, κ0(B). La configuración al tiempo corriente es la configuración corriente.
Para análisis de deformación, la configuración de referencia es identificada como configuración no deformada y la configuración corriente como configuración deformada. También, el tiempo no está considerado mientras analizar deformación, así la secuencia de configuraciones entre las configuraciones no deformadas y deformadas no son de interés.
Los componentes Xi del vector de posición X de una partícula en la configuración de referencia, con respecto al sistema de coordinadas de referencia, se llaman el material o coordinadas de
referencia. De otro lado, los componentes Xi del vector de posición X de una partícula en la configuración deformado, con respecto al sistema de coordinadas de referencia espacial, se llaman las coordinadas espaciales.
Hay dos métodos para analizar la deformación de un continuo. Una descripción es hecho en términos del material o coordinadas referenciales, llamado descripción material o descripción Lagrangian. Una segunda descripción de deformación es hecho en términos de las coordinadas espaciales llamado la descripción espacial o descripción Eulerian.
Hay continuidad durante la deformación de un cuerpo continuo en el sentido que:
Los puntos de material que forman una curva cerrado a cualquier instante siempre formarán una curva cerrado a cualquier tiempo posterior.
Los puntos de material que forman un superficie cerrado a cualquier instante siempre formarán un superficie cerrado a cualquier tiempo posterior y la materia dentro del superficie cerrado siempre se quedará dentro.
Deformación Affine
Una deformación se llama una deformación affine, si se define por una transformación affine. Una tal transformación es compuesta de una transformación lineal (como rotación, de corte, extensión y compresión) y una translación de cuerpo rígido. Deformaciones affines también se llaman deformaciones homogéneas.
Por lo tanto una deformación affine tiene la forma:
Donde x es la posición de un punto en la configuración deformado, X es la posición en una configuración de referencia, t es un parámetro como tiempo, F es una transformación lineal y c es la translación. En forma de matriz, donde los componentes están con respecto a un base orthonormal,
Desplazamiento
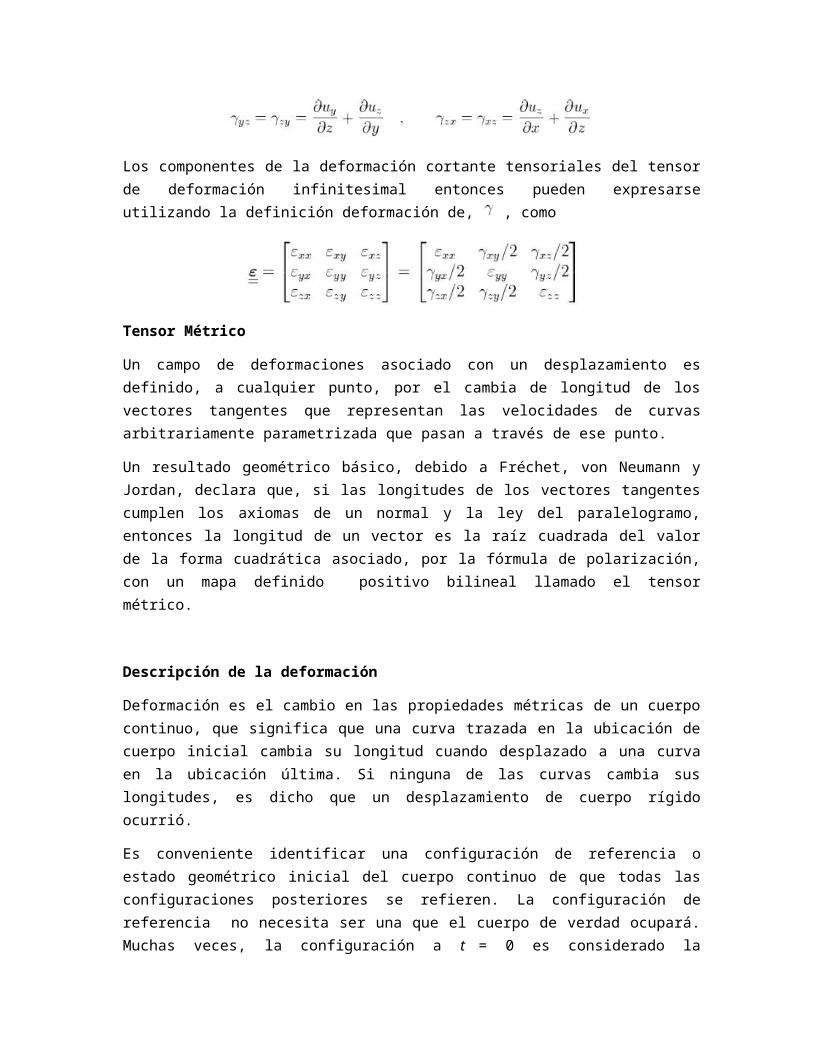
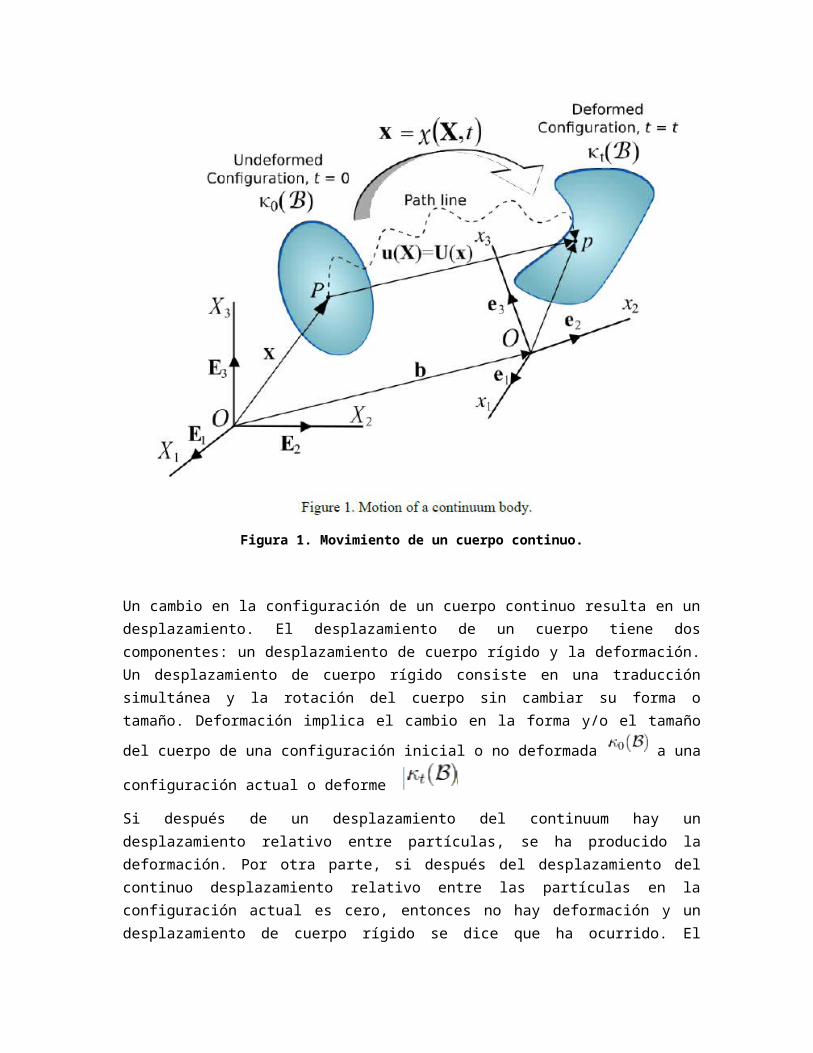
Figura 1. Movimiento de un cuerpo continuo.
Un cambio en la configuración de un cuerpo continuo resulta en un desplazamiento. El desplazamiento de un cuerpo tiene dos componentes: un desplazamiento de cuerpo rígido y la deformación. Un desplazamiento de cuerpo rígido consiste en una traducción simultánea y la rotación del cuerpo sin cambiar su forma o tamaño. Deformación implica el cambio en la forma
y/o el tamaño del cuerpo de una configuración inicial o no deformada a una
configuración actual o deforme
Si después de un desplazamiento del continuum hay un desplazamiento relativo entre partículas, se ha producido la deformación. Por otra parte, si después del desplazamiento del continuo desplazamiento relativo entre las partículas en la configuración actual es cero, entonces no hay deformación y un desplazamiento de cuerpo rígido se dice que ha ocurrido. El vector que une las posiciones de una partícula P en la configuración no deformada y configuración deformada se
denomina el vector de desplazamiento en la descripción de Lagrange, o
en la descripción euleriana.
Un campo de desplazamiento es un campo vectorial de todos los vectores de desplazamiento para todas las partículas en el cuerpo, que relaciona la configuración deformada con la
configuración no deformada. Es conveniente para hacer el análisis de la deformación o movimiento de un cuerpo continuo en términos de el campo de desplazamiento, en general, el campo de desplazamiento se expresa en términos del material de coordenadas como:
o en términos de las coordenadas espaciales como
donde αJi son los cosenos directores entre el material y espacial sistemas de coordenadas con vectores unitarios EJ y ei, respectivamente. Así
y la relación entre ui y UJ viene dada por
sabiendo que
Después.
Es común para superponer los sistemas para las configuraciones deformadas y deformes, que se traduce en b = 0 coordenada, y los cosenos directores convertirse deltas Kronecker:
Por lo tanto, tenemos
o en términos de las coordenadas espaciales como

Desplazamiento tensor gradiente
La diferenciación parcial del vector de desplazamiento con respecto del material coordenadas
que produce el desplazamiento de material tensor gradient Así tenemos:
donde F es el tensor gradiente de deformación.
Del mismo modo, la diferenciación parcial del vector de desplazamiento con respecto a las
coordenadas espaciales se obtiene el gradiente de tensor desplazamiento especial Así tenemos.
Ejemplos de deformaciones
Las deformaciones homogeneas son útiles en la aclaracion de comportamiento de los materiales. Algunas deformaciones homogéneos de interés son
• Extensión uniforme
• dilatación pura
• corte simple
• cortante
Deformaciones plano son también de interés, particularmente en el contexto experimental.
Deformación Plana
Una deformación plano, también llamada deformación plana, es uno donde la deformación se limita a uno de los planos en la configuración de referencia. Si la deformación se limita al plano
descrito por los vectores de la base el gradiente de deformación tiene la forma
En forma matricial
Desde el teorema de descomposición polar, el gradiente de deformación se puede descomponer en un tramo y una rotación. Dado que toda la deformación es en un plano, podemos escribir
donde θ es el ángulo de rotación y λ1, λ2 son los principales tramos.
Deformación plana isocórico
Si la deformación es isocórico (volumen preservar), entonces y tenemos
Alternativamente,
Cortante simple

Una deformación por cortante simple se define como una deformación plano isócoro en el que hay un conjunto de elementos de línea con una orientación de referencia dado que no cambian de longitud y orientación durante la deformación.
Si es la orientación de referencia fijo en el que los elementos de línea no se deforman durante el
deformación entonces λ1 = 1 y Por lo tanto,
Dado que la deformación es isócoro,
definir Entonces, el gradiente de deformación en el cortante simple puede expresarse como
Ahora,
desde también podemos escribir el gradiente de deformación
Capítulo 10
Flexión

Flexión de una viga.
En la mecánica de ingeniería, de flexión (también conocido como flexión) caracteriza el comportamiento de un elemento estructural delgado sometido a una carga externa aplicada perpendicularmente a un eje longitudinal del elemento. El elemento estructural se supone que es tal que al menos una de sus dimensiones es una pequeña fracción, típicamente 1/10 o menos, de los otros dos. Cuando la longitud es considerablemente más largo que el ancho y el espesor, el elemento se llama un haz. Una barra del armario flacidez bajo el peso de la ropa en perchas de ropa es un ejemplo de una flexión experimentar viga. Por otro lado, una concha es una estructura de cualquier forma geométrica donde la longitud y la anchura son del mismo orden de magnitud, pero el espesor de la estructura (conocida como la "pared") es considerablemente menor. Un diámetro grande, pero de paredes finas tubo, corto soportado en sus extremos y se carga lateralmente es un ejemplo de una concha de experimentar flexión.
En ausencia de un calificador, el término flexión es ambiguo porque flexión puede producirse localmente en todos los objetos. Para hacer que el uso del término más preciso, los ingenieros se refieren a la flexión de varillas, la flexión de las vigas, la flexión de las placas, la flexión de las cascaras y así sucesivamente.
Flexión cuasiestático de vigas
A deforma y tensiones de vigas desarrollan dentro de ella cuando se aplica una carga transversal en él. En el caso cuasi-estática, la cantidad de deflexión de flexión y las tensiones que se desarrollan se supone que no cambian con el tiempo. En una viga horizontal apoyado en los extremos y cargado hacia abajo en el medio, el material en el lado del sobre de la viga se comprime mientras que el material en la parte inferior se estira. Hay dos formas de tensiones internas causadas por cargas laterales:
Tensión cortante paralelo a la carga lateral además de la tensión de cizallamiento complementaria en planos perpendiculares a la dirección de la carga;

Esfuerzo de compresión directa en la región superior de la viga, y esfuerzo de tracción directa en la región inferior de la viga.
Estas dos últimas fuerzas forman un par o momento ya que son iguales en magnitud y opuestas direcciones.
Este momento de flexión se resiste a la deformación característica flacidez de experimentar una flexión de la viga. La distribución de tensiones en una viga se puede predecir con bastante precisión, incluso cuando se utilizan algunos supuestos simplificadores.
Teoría de la flexión (Euler-Bernoulli)
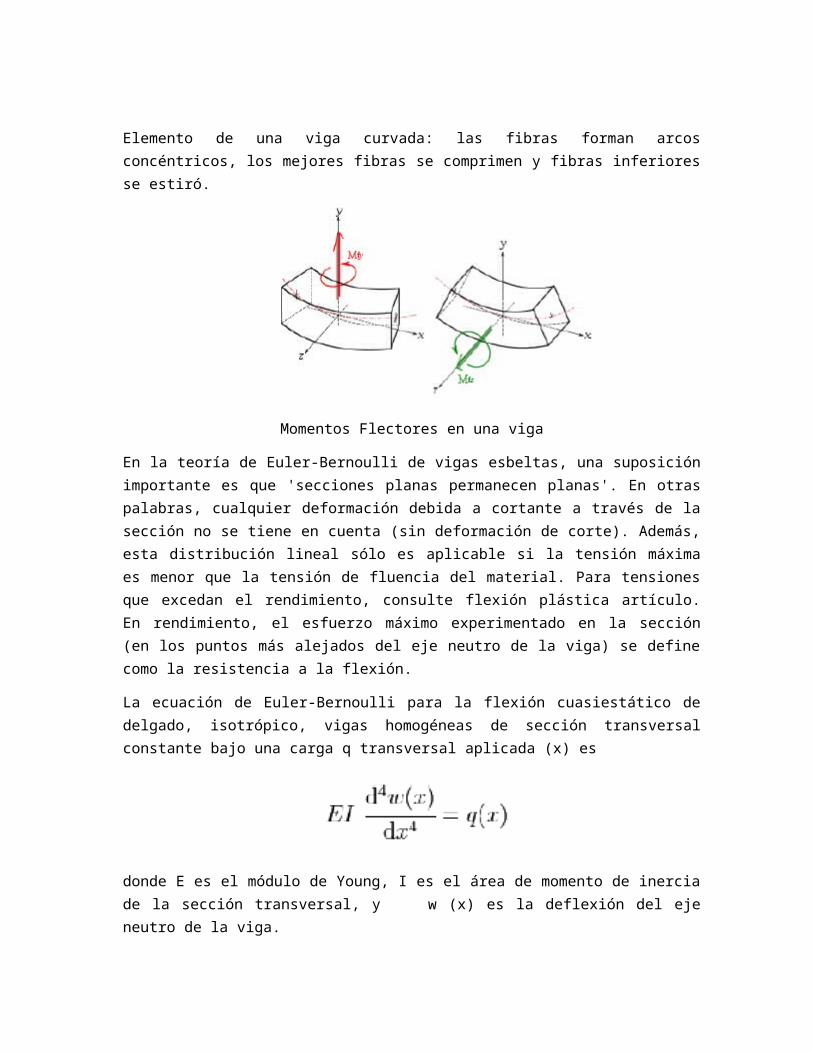
Elemento de una viga curvada: las fibras forman arcos concéntricos, los mejores fibras se comprimen y fibras inferiores se estiró.
Momentos Flectores en una viga
En la teoría de Euler-Bernoulli de vigas esbeltas, una suposición importante es que 'secciones planas permanecen planas'. En otras palabras, cualquier deformación debida a cortante a través

de la sección no se tiene en cuenta (sin deformación de corte). Además, esta distribución lineal sólo es aplicable si la tensión máxima es menor que la tensión de fluencia del material. Para tensiones que excedan el rendimiento, consulte flexión plástica artículo. En rendimiento, el esfuerzo máximo experimentado en la sección (en los puntos más alejados del eje neutro de la viga) se define como la resistencia a la flexión.
La ecuación de Euler-Bernoulli para la flexión cuasiestático de delgado, isotrópico, vigas homogéneas de sección transversal constante bajo una carga q transversal aplicada (x) es
donde E es el módulo de Young, I es el área de momento de inercia de la sección transversal, y w (x) es la deflexión del eje neutro de la viga.
Después de que se haya obtenido una solución para el desplazamiento de la viga, el momento de flexión (M) y fuerza de corte (Q) en el haz se pueden calcular utilizando las relaciones
Flexión viga simple es a menudo analizada con la ecuación de Euler-Bernoulli viga. Las condiciones de utilización de la teoría de flexión simple son:
1. La viga está sometida a flexión pura. Esto significa que la fuerza de corte es cero, y que no hay cargas de torsión o axiales que están presentes.
2. El material es isotrópico y homogéneo.
3. El material obedece la ley de Hooke (es linealmente elástico y no lo hará
deformar plásticamente).
4. El haz es inicialmente recta con una sección transversal que es constante en toda la longitud de la viga.
5. La viga tiene un eje de simetría en el plano de flexión.
6. Las proporciones de la viga son tales que éste deje por flexión en lugar de por trituración, arrugas o de lado pandeo.
7. secciones transversales de la viga permanecen plano durante el doblado.

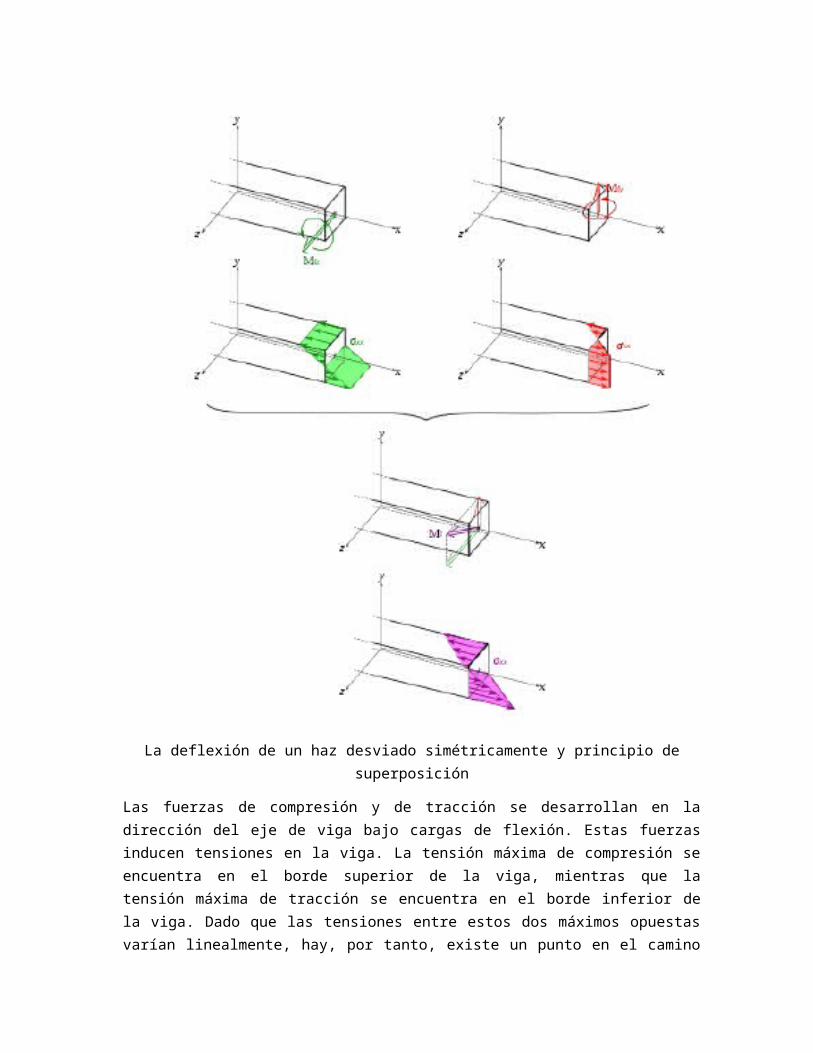
La deflexión de un haz desviado simétricamente y principio de superposición
Las fuerzas de compresión y de tracción se desarrollan en la dirección del eje de viga bajo cargas de flexión. Estas fuerzas inducen tensiones en la viga. La tensión máxima de compresión se encuentra en el borde superior de la viga, mientras que la tensión máxima de tracción se encuentra en el borde inferior de la viga. Dado que las tensiones entre estos dos máximos opuestas varían linealmente, hay, por tanto, existe un punto en el camino lineal entre ellos donde no hay tensión de flexión. El locus de estos puntos es el eje neutral. Debido a esta área sin el estrés y las áreas adyacentes de baja tensión, con vigas de sección transversal constante en flexión no es un medio particularmente eficaz para soportar una carga, ya que no utiliza toda la capacidad de la viga hasta que esté a punto de colapsar. Vigas de gran brida (Ibeams) y vigas de
celosía abordar con eficacia esta ineficiencia ya que minimizan la cantidad de material en esta región bajo-estresado.
La fórmula clásica para la determinación del esfuerzo de flexión en una viga bajo flexión simple es:
dónde
• σ es el esfuerzo de flexión
• M - el momento alrededor del eje neutro
• y - la distancia perpendicular al eje neutro
• Ix - el momento de inercia alrededor del eje neutro x
Extensiones de Euler-Bernoulli haz teoría de la flexion
flexión plástica
la ecuación sólo es válida cuando la tensión en la fibra extrema (es decir, la porción de la viga más alejada del eje neutro) está por debajo de la tensión de fluencia del material a partir del cual se construye. En cargas más altas la distribución de la tensión se convierte en no lineal, y los materiales dúctiles eventualmente entran en un estado de articulación plastica donde la magnitud de la tensión es igual a la tensión de fluencia en todas partes en el haz, con una discontinuidad en el eje neutro donde la tensión cambia desde la tracción a compresión. Este estado de rótula plástica se utiliza normalmente como un estado límite en el diseño de estructuras de acero.
Complejo de flexión o asimétrica
La ecuación anterior sólo es válida si la sección transversal es simétrica. Para vigas homogéneas con secciones asimétricas, la tensión axial en la viga está dada por
donde y, z son las coordenadas de un punto en la sección transversal en la que el estrés se va a determinar como se muestra a la derecha, My y Mz son los momentos de flexión alrededor de los ejes y y z del centroide, Iy y Iz son los segundos momentos de área (distinta de momentos de

inercia) alrededor de los ejes y y Z, y IYZ es el producto de los momentos de área. Usando esta ecuación es posible calcular la tensión de flexión en cualquier punto de la sección transversal de la viga sin importar la orientación momento o forma de sección transversal. Tenga en cuenta que My, Mz, Iy, Iz, IYZ no cambian de un punto a otro en la sección transversal.
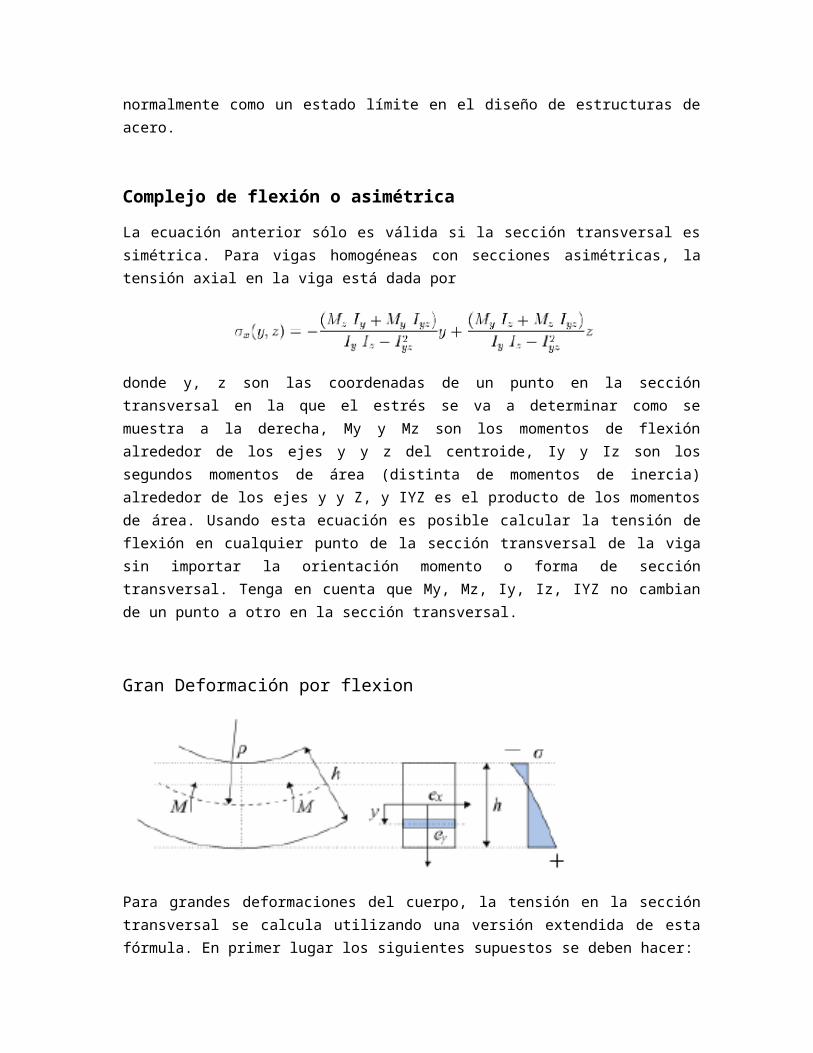
Gran Deformación por flexion
Para grandes deformaciones del cuerpo, la tensión en la sección transversal se calcula utilizando una versión extendida de esta fórmula. En primer lugar los siguientes supuestos se deben hacer:
1. Asunción de secciones planas - antes y después de la deformación de la sección considerada del cuerpo se mantiene plano (es decir, no se arremolinaba).
2. cortante y tensiones normales en esta sección que son perpendiculares a la normal vector de la sección transversal no tiene ninguna influencia sobre tensiones normales que son paralelas a esta sección.
Consideraciones de flexión grandes deben ser implementadas cuando el radio de curvatura ρ es menor que diez sección alturas h:
Con esas premisas el estrés en gran flexión se calcula como:
dónde
F: es la fuerza normal
A: es el área de la sección
M: es el momento de flexión
Ρ: es el radio de curvatura local (el radio de flexión en la sección actual)
Ix ': es la zona momento de inercia en el eje x, y en el lugar y es la posición a lo largo del eje y en el área de la sección en la que se calcula la tensión σ
Cuando radio de curvatura ρ tiende a infinito e y es cercano a cero, la fórmula original está de
vuelta:
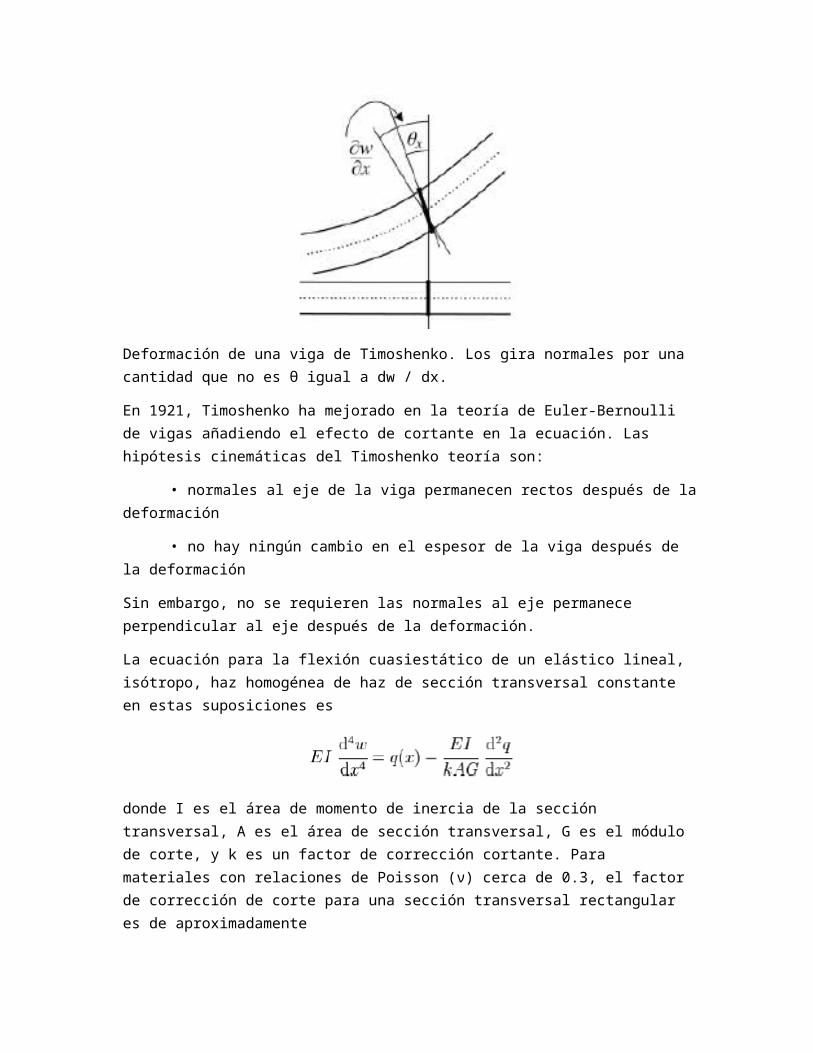
La teoría de la flexion de Timoshenko
Deformación de una viga de Timoshenko. Los gira normales por una cantidad que no es θ igual a dw / dx.
En 1921, Timoshenko ha mejorado en la teoría de Euler-Bernoulli de vigas añadiendo el efecto de cortante en la ecuación. Las hipótesis cinemáticas del Timoshenko teoría son:
• normales al eje de la viga permanecen rectos después de la deformación
• no hay ningún cambio en el espesor de la viga después de la deformación
Sin embargo, no se requieren las normales al eje permanece perpendicular al eje después de la deformación.
La ecuación para la flexión cuasiestático de un elástico lineal, isótropo, haz homogénea de haz de sección transversal constante en estas suposiciones es
donde I es el área de momento de inercia de la sección transversal, A es el área de sección transversal, G es el módulo de corte, y k es un factor de corrección cortante. Para materiales con relaciones de Poisson (ν) cerca de 0.3, el factor de corrección de corte para una sección transversal rectangular es de aproximadamente
la rotación de la normal es descrita por la ecuación
El momento de flexión (M) y la fuerza de corte (Q) están dadas por
Flexión dinámica de vigas
La flexión dinámica de vigas, también conocido como vibraciones de flexión de las vigas, se investigó por primera vez por Daniel Bernoulli en el siglo 18. La ecuación de Bernoulli de oción de un haz de vibración tiende a sobreestimar las frecuencias naturales de vigas y se mejoró marginalmente por Rayleigh en 1877 por la adición de una rotación de plano medio. En 1921 Stephen Timoshenko mejoró la teoría aún más mediante la incorporación del efecto de cortante en la respuesta dinámica de vigas de flexión. Esto permitió que la teoría que se utilizará para los problemas que implican altas frecuencias de vibración donde la teoría de Euler-Bernoulli dinámica es insuficiente. Las teorías de Euler-Bernoulli y Timoshenko para la flexión dinámica de vigas siguen siendo utilizados ampliamente por los ingenieros.
La teoría de Euler-Bernoulli
La ecuación de Euler-Bernoulli para la flexión dinámica de delgado, isotrópico, vigas homogéneas de sección transversal constante bajo una carga aplicada q transversal (x, t) es
donde E es el módulo de Young, I es el área de momento de inercia de la sección transversal, w (x, t) es la deflexión del eje neutro de la viga, y m es la masa por unidad de longitud de la viga.
vibraciones libres
Para la situación donde no hay carga transversal sobre la viga, la ecuación de flexion toma la forma
Libre vibraciones armónicas de la viga entonces pueden expresarse como
y la ecuación de flexión se puede escribir como
La solución general de la ecuación anterior es
donde A1, A2, A3, A4 son constantes y
Las formas de los modos de una viga-I en voladizo
Teoria de Timoshenko-Rayleigh
En 1877, Rayleigh propuso una mejora a la teoría dinámica haz de Euler-Bernoulli incluyendo el efecto de la inercia rotacional de la sección transversal de la viga. Timoshenko mejorado esa teoría en 1922, añadiendo el efecto de cizalla en la ecuación del haz. Deformaciones por cortante de la normal a la superficie media de la viga están permitidos en la teoría de Timoshenko-Rayleigh.
La ecuación para la flexión de un elástico lineal, isótropo, homogéneo de una viga sección transversal constante en estas suposiciones es
Dónde es el momento polar de inercia de la sección transversal, m = ρA es la masa por unidad de longitud de la viga, ρ es la densidad de la viga, A es el área de la sección transversal, G es el módulo de cizallamiento, y k es un factor de corrección de corte. Para materiales con relaciones de Poisson (ν) cerca de 0.3, el factor de corrección por cortante son aproximadamente
Vibraciones Libre
Para, vibraciones armónicas libres las ecuaciones Timoshenko-Rayleigh toman la forma
Esta ecuación se puede resolver por señalar que todos los derivados de w deben tener la misma forma para anular y, por tanto, como se puede esperar solución de la forma . Esta observación conduce a la ecuación característica
Las soluciones de esta ecuación de cuarto grado son
Dónde
La solución general de la ecuación de Timoshenko-Rayleigh para vibraciones libres puede entonces ser escrito como
Flexión cuasiestático de placas
La deformación de una placa delgada destacando el desplazamiento, la superficie media (roja) y la normal a la superficie media (azul)
La característica definitoria de haces es que una de las dimensiones es mucho más grande que los otros dos. Una estructura se llama una placa cuando es plana y una de sus dimensiones es mucho menor que los otros dos. Hay varias teorías que intentan describir la deformación y el estrés en una placa bajo cargas aplicadas dos de los cuales han sido utilizados ampliamente. estos son:
• la teoría Kirchhoff-Love de placas (también llamada teoría de placas clásica)
• la teoría de placas Mindlin-Reissner (también llamada la teoría de cizalla de primer orden de las placas)
Teoría de placas de Kirchhoff-Love
Las hipótesis de la teoría de Kirchhoff-Love son
• Las líneas rectas normales a la mitad de la superficie permanecen recta después de la deformación
• Las líneas rectas normales a la mitad de la superficie permanecen normales a la mitad de la superficie después de la deformación
• el espesor de la placa no cambia durante una deformación.
Estas suposiciones implican que:
donde es el desplazamiento de un punto en la placa y w0 es el desplazamiento de la superficie media.
Las relaciones de tensión-desplazamiento son:
Las ecuaciones de equilibrio son
donde q (x) es una carga aplicada normal a la superficie de la placa.
En términos de desplazamientos, las ecuaciones de equilibrio para una placa elástica isotrópica, lineal en ausencia de carga externa se pueden escribir como:
En notación tensorial directa,

Teoría de placas Mindlin-Reissner
La hipótesis especial de esta teoría es que las normales a la mitad de la superficie permanecen rectos y no extensible, pero no necesariamente normal a la mitad de la superficie después de la deformación. Los desplazamientos de la placa están dadas por:
Donde son las rotaciones de la normal.
Las relaciones de tensión-desplazamiento que resultan de estos supuestos son
donde κ es un factor de corrección de cortante.
Las ecuaciones de equilibrio son
Donde:
Flexión dinámica de placas

Dinámica de placas delgadas Kirchhoff
La teoría dinámica de placas determina la propagación de ondas en las placas, y el estudio de las ondas estacionarias y modos de vibración. Las ecuaciones que gobiernan la flexión dinámica de las placas de Kirchhoff son:
donde, por una placa con densidad ρ = ρ (x),
Y
Las cifras a continuación muestran algunos modos vibracionales de una placa circular