Capitulo 1 (MONGE)
9
SISTEMAS DE REPRESENTACION UNIVERSIDAD NACIONAL DE LA RIOJA DPTO. DE CIENCIA Y TECNOLÓGICAS APLICADAS A LA PRODUCCIÓN, AL AMBIENTE Y AL URBANISMO MANUAL DE CATEDRA Unidad Temática: GEOMETRIA DESCRIPTIVA METODO DE MONGE Ing. Civil JOSE GASPANELLO Prof. Titular de la Cátedra Sistemas de Representación Bibliografía: |Prof. Titular Ing. José Gaspanello 1
-
Upload
marcolocos -
Category
Documents
-
view
15 -
download
0
Transcript of Capitulo 1 (MONGE)
SISTEMAS DE REPRESENTACION
UNIVERSIDAD NACIONAL DE LA RIOJADPTO. DE CIENCIA Y TECNOLÓGICAS APLICADAS A LA PRODUCCIÓN, AL AMBIENTE Y AL URBANISMO
MANUAL DE CATEDRA
Unidad Temática:GEOMETRIA DESCRIPTIVA
METODO DE MONGE
Ing. Civil JOSE GASPANELLOProf. Titular de la Cátedra
Sistemas de Representación
Bibliografía:
1.Geometría Descriptiva.- (Eduardo Cammisa Tecco)
2.Geometría Descriptiva.- (Donato Di Pietro)3.Dibujo Técnico II.- (Roberto E. Etchebarne)4.Sistema Diédrico.- (José Luís Ferrer Muñoz)
|Prof. Titular Ing. José Gaspanello 1

SISTEMAS DE REPRESENTACION
CONTENIDO
3.- CAPITULO I: Introducción al sistema:
Introducción al sistema diedrico de MONGE. Bases del sistema de proyección y mecánica del método.-
7.- CAPITULO II: Representación de elementos básicos: Proyección del punto, puntos situados en los cuatro cuadrantes.-Proyección de la recta, casos particulares, trazas de una recta.-Proyección del plano, trazas de un plano, posiciones particulares, rectas notables del plano.-
23.- CAPITULO III: Intersección: Intersecciones de planos, método general, intersección de planos dados por sus trazas, intersección de planos dados por rectas concurrentes y por rectas paralelas.-Intersección de recta y plano, intersección de una recta con un plano dados por sus trazas.-
26.- CAPITULO IV: Paralelismo y Perpendicularidad:Paralelismo, rectas paralelas, recta paralela a un plano, planos paralelos.-Perpendicularidad, método general, distintos casos.-
31.- CAPITULO V: Cambio de planos de proyección:Introducción, cambio de plano vertical, cambio de plano horizontal, distintos casos.-
37.- GUIA DE TRABAJOS PRACTICOS
|Prof. Titular Ing. José Gaspanello 2

SISTEMAS DE REPRESENTACION
CAPITULO IINTRODUCCION AL SISTEMA:
Como lo expresáramos en la Unidades IV “Proyecciones Ortogonales”, de la primera parte de este manual; existe una dos modos de proyecciones, según la distancia que se encuentre el observador con respecto al plano o superficie de proyección; una Proyección Cónica o Central, también llamada Perspectiva, cuando el punto de vista u observador se encuentra a una distancia finita o relativamente cercano del plano de proyección; y la otra denominada Proyección Cilíndrica o Paralela, cuando el punto de vista se encuentra a una distancia tan grande del plano de proyección, o sea en el infinito, que nos permita considerar que los rayos proyectantes sean paralelas.-
Dentro del modo de Proyección Cilíndrica se encuentran las proyecciones ortogonales o también llamadas proyecciones Ortográficas, cuando los rayos proyectantes además de ser paralelos entre si, son perpendiculares al plano de proyección.- Dentro de este modo de proyección se desarrolla el Método de Monge, padre de la “Geometría Descriptiva”, y que a continuación pasaremos a tratar en esta unidad.-
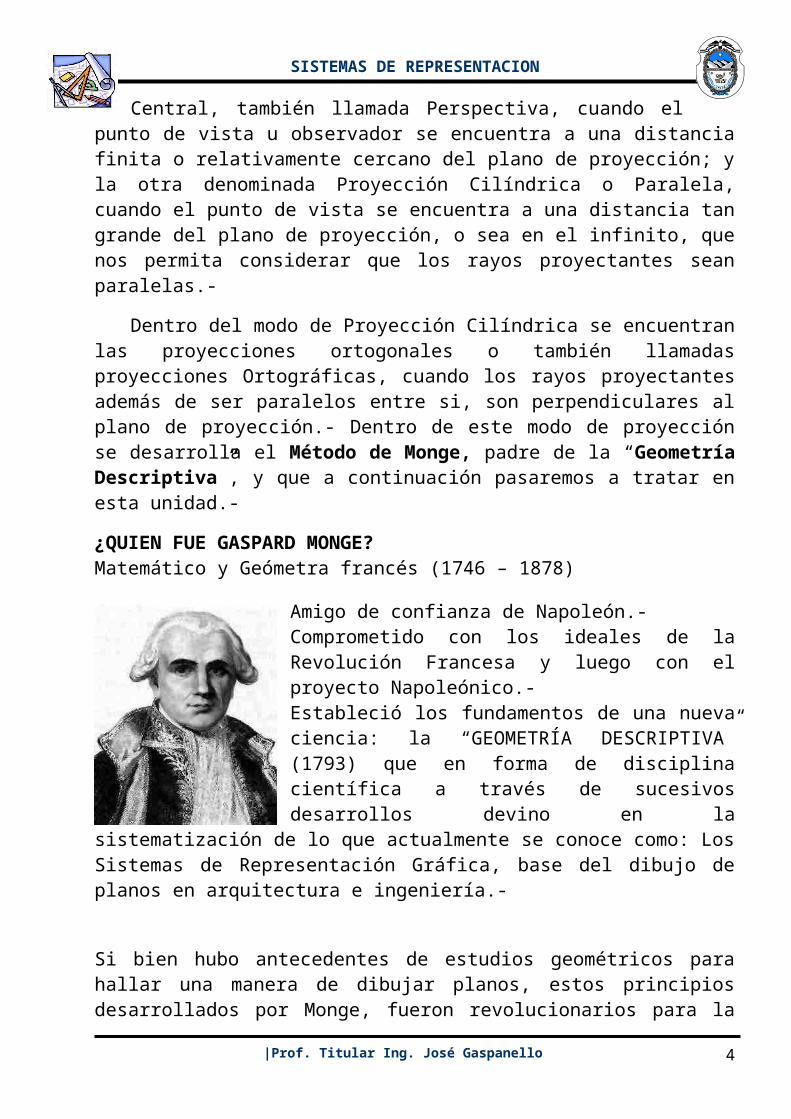
¿QUIEN FUE GASPARD MONGE? Matemático y Geómetra francés (1746 – 1878)
Amigo de confianza de Napoleón.-Comprometido con los ideales de la Revolución Francesa y luego con el proyecto Napoleónico.-Estableció los fundamentos de una nueva ciencia: la “GEOMETRÍA DESCRIPTIVA” (1793) que en forma de disciplina científica a través de sucesivos desarrollos devino en la sistematización de lo que actualmente se conoce como: Los Sistemas de Representación Gráfica, base del dibujo de planos en arquitectura e ingeniería.-
|Prof. Titular Ing. José Gaspanello 3
SISTEMAS DE REPRESENTACION
Si bien hubo antecedentes de estudios geométricos para hallar una manera de dibujar planos, estos principios
desarrollados por Monge, fueron revolucionarios para la ciencia de la representación gráfica, ya que hoy seguimos representando en base a esos principios proyéctales.-
BASES DEL SISTEMAS DE PROYECCION:Tienen por razón fundamental, por supuesto, representar en el
plano la realidad en sus tres dimensiones y son la base y objeto de la “Geometría Descriptiva”, a la cual podríamos definir como “la ciencia matemática grafica que tiene por objeto dar métodos fáciles y determinados para representar en un plano las formas naturales y las que puedan concebirse con la combinación de sus formas simples, facilitando la solución de todos los problemas inherentes a ellas”
El método de representación que utiliza la geometría descriptiva es el método geométrico de las proyecciones, que consisten en la proyección de los objetos sobre el plano del cuadro o de proyección, mediante los rayos proyectantes, que son líneas imaginarias, que pasando por los vértices o puntos del objeto, proporcionan en su intersección con el plano del cuadro, la proyección de dicho vértice o punto, como lo vimos en la primera parte de este manual (Unidad IV).-
Si logramos representar correctamente un punto del espacio, podremos mediante dos puntos representar una recta o por una sujeción de puntos una curva cualquiera. Tres puntos o un punto y una recta definirán un plano y cualquier superficie podrá definirse por sus generatrices. El problema, se resume entonces, en representar un punto en el espacio, como se lo muestra en la figura.-
Si tomamos como elemento a proyectar el punto, tendremos para cualquiera de los sistemas, los siguientes elementos a considerar: el punto que se proyecta, el plano sobre el cual se proyecta, el rayo proyectante del punto y
|Prof. Titular Ing. José Gaspanello 4

SISTEMAS DE REPRESENTACION
la proyección de este sobre el plano, que será la intersección del rayo proyectante con el plano.-
En cualquiera de los sistemas que hemos descripto, dado el punto del espacio, su proyección sobre el plano de proyección queda determinada; pero no sucede lo mismo si se da la proyección y se quiere determinar el punto del espacio al cual ella corresponde, pues todos los puntos que pertenecen a una misma proyectante, tienen igual proyección. Ver figura.-
Observamos en la figura que los puntos A y B tienen sus proyecciones confundidas por estar sobre la misma proyectante, por lo que no sabremos cual es el punto proyectado. Solo tendremos resuelto el problema si cada punto del espacio puede proyectarse inequívocamente y además queremos que la representación sea sobre un plano.-
O sea que tenemos fijadas las dos condiciones que deben cumplir los sistemas a adoptar y son:
a) Representación plana o sea bidimensional.-b) Correspondencia biunívoca entre los puntos a representar y
sus representaciones.-
Existen, entre otros métodos, tres que cumplen las condiciones antes mencionadas y son a) Método de Monge, b) Proyecciones Acotadas y c) Proyecciones cónicas.-
En el primero de los casos adopta un segundo plano de proyección perpendicular al primero, (figura 1) y el segundo caso establece la distancia (cota) del punto al plano, medida sobre su proyectante (figura 2), ambos casos utilizan la proyección paralela ortogonal o normal.-
|Prof. Titular Ing. José Gaspanello 5

SISTEMAS DE REPRESENTACION
figura 1 figura 2 (Método Monge) (Proyección Acotada)
MECANICA DEL METODO MONGE y/o SISTEMA DIEDRICO:
Este método, o sistema, considera al espacio dividido en cuatro partes iguales, por medio de dos planos perpendiculares entre si, y que posteriormente se yuxtaponen por giro alrededor de la recta intersección de ambos planos.-
Estos planos que se cortan perpendicularmente son uno horizontal y el otro será evidentemente vertical.- Por ser estos los futuros receptores de las proyecciones de los elementos a representar, denominamos al plano horizontal, “PLANO HORIZONTAL DE PROYECCIÓN” (H) y al plano vertical, se denomina “PLANO VERTICAL DE PROYECCIÓN” (V).-
La recta intersección de ambos planos será la “LÍNEA DE TIERRA” (LT).-
Los planos de proyección V y H dividen al espacio en cuatro regiones, diedros o cuadrantes (I, II, III y IV), enumerados en sentido anti-horario.-
Al cortarse los planos Horizontal y Vertical de Proyección generan ángulos diedros de 900 a los que podemos asignarle sus correspondientes Planos Bisectores.-
Llamaremos PRIMER PLANO BISECTOR al plano que va del Primer Cuadrante (I) al Tercer Cuadrante (III).-
Llamaremos SEGUNDO PLANO BISECTOR al plano que va del Segundo Cuadrante (II) al Cuarto Cuadrante (IV).-
Teniendo en cuenta la existencia simultanea de los planos de Proyección y los Bisectores, el espacio ha quedado dividido en ocho (8) sub-espacios llamados OCTANTES y numeraremos del 1 al 8 tal como se indica en la figura 6.-
|Prof. Titular Ing. José Gaspanello 6

SISTEMAS DE REPRESENTACION
figu ra 6
|Prof. Titular Ing. José Gaspanello 7