
CAPITULO I181.112.224.103/bitstream/27000/629/1/T-UTC-1083.pdf · los usuarios estén pensando...
154
1 CAPITULO I FOTO 1 FUENTE: EL AUTOR FUNDAMENTOS GENERALES Se describe los siguientes. 1.1 ANALISIS HISTORICOS.- La historia ha permitido al ser humano tener pleno conocimiento de cómo ha ido evolucionando la ciencia de la computación, desde sus inicios, a continuación se realizará un breve recuento histórico del desarrollo de los computadores y las tarjetas de adquisición de datos. El ser humano con la innata curiosidad que le caracteriza, siempre estuvo en la búsqueda de nuevos instrumentos y procedimientos de medida y cálculo partiendo de lo mas elemental a lo más complicado.
Transcript of CAPITULO I181.112.224.103/bitstream/27000/629/1/T-UTC-1083.pdf · los usuarios estén pensando...

1
CAPITULO I
FOTO 1
FUENTE: EL AUTOR
FUNDAMENTOS GENERALES
Se describe los siguientes.
1.1 ANALISIS HISTORICOS.- La historia ha permitido al ser humano tener
pleno conocimiento de cómo ha ido evolucionando la ciencia de la computación,
desde sus inicios, a continuación se realizará un breve recuento histórico del
desarrollo de los computadores y las tarjetas de adquisición de datos. El ser humano
con la innata curiosidad que le caracteriza, siempre estuvo en la búsqueda de nuevos
instrumentos y procedimientos de medida y cálculo partiendo de lo mas elemental a lo
más complicado.
2
En 1924, Bull en Francia patenta algunos dispositivos electromagnéticos para
análisis numéricos, crea una sociedad que luego seria la firma Bull en Europa.
Con el descubrimiento de los semiconductores o transistores y coincidiendo
con el desarrollo de la Segunda Guerra Mundial que causó una gran presión social,
obligo a los científicos a mejorar la tecnología existente para adaptarla a procesos y
trabajos bélicos, paralelamente se pusieron a punto los semiconductores o transistores
cuyas propiedades conocían desde mucho antes.
En 1943 en la escuela de Ingeniería Electrónica de Moore, bajo la dirección de
John Mauchly y Presper Echert, se construyó la UNIVAC esta computadora digital
utilizaba diodos de cristal .
La IBM (Thomas Watson) en 1970 emplean los circuitos integrados y esta
firma lanzó los primeros computadores personales (PC), así comenzó la revolución de
este campo debido a los adelantos casi diarios que se van suscitando en la tecnología
de la fabricación e integración.
En casa y en la oficina, el ordenador personal continúa con su progreso. El PC
se ha establecido en un gran número de campos. Los componentes hardware y
software están siendo cada vez más potentes y más rentables. Es lógico, por tanto, que
la industria quiera tomar provecho de este hecho, para reducir costes y/o incrementar
la productividad.
Ciertas tareas industriales están actualmente en manos de los ordenadores
desde hace tiempo: desde emplear la tecnología Windows cuando se manejan pedidos

3
y/o se ajustan parámetros de maquinaria hasta preparar o visualizar datos
prácticamente de cualquier tipo.
No hay que sorprenderse entonces, que los especialistas en automatización y
los usuarios estén pensando ahora en qué forma se pueden transferir al PC otras
tareas, para poder llegar a un mayor ahorro. Más recientemente un gran número de
simuladores de PLC (controladores lógicos programables) por software ha aparecido
en el mercado, que están ayudando a transferir el control de tareas al disco duro y
presentan una automatización más efectiva en costes en una simple pieza de hardware
(el PC).
TARJETAS DE EXPANSIÓN. Como el sistema operativo sólo puede
proporcionar respuestas suaves en tiempo real lo más simple es emplear extensiones
hardware para las tareas críticas (placas de expansión PC) y soluciones software para
el resto de tareas. Esto nos lleva a una compatibilidad con futuros sistemas operativos
y una solución totalmente factible actualmente. Estas tarjetas de expansión asumen las
tareas críticas en tiempo real que el ordenador (PC) no puede atender, se está
hablando de tarjetas que incorporan DSPs (Procesadores de Señales Digitales) o
microcontroladores y que aportan una ayuda a la anterior “sobrecarga” mencionada
para los ordenadores (PC).
FOTO 2

4
FUENTE: EL AUTOR
LA ESTRUCTURA ABIERTA. Aún no se ha establecido un estándar para poseer
extensiones compatibles en tiempo real de sistemas operativos. De una forma
estrictamente determinante, los sistemas estándar actuales deben ser modificados de
forma general, así que la principal ventaja de un sistema basado en PC - su estructura
abierta – pude llegar a ser un inconveniente. No obstante, la estructura abierta,
permite a la empresa o el desarrollador más libertad en la elección de la herramienta
adecuada para el análisis, diseño y programación del sistema SCADA. La solución
comienza a ser propietaria nuevamente (cada empresa ofrece su solución) y la
conversión a futuras generaciones de sistemas operativos lo hace más difícil.

5
FOTO 3
FUENTE: EL AUTOR
1.2 OBJETIVOS E HIPÓTESIS.-
GENERAL.- Dar un enfoque a la comunicación entre el computador y el ambiente
externo a través de señales eléctricas que se transmiten del exterior.
ESPECÍFICOS:
- Dar una introducción a las comunicaciones especialmente de tipo paralelo entre la
PC y dispositivos periféricos de entrada y salida, así como la descripción de sistemas
de Adquisición de datos y Supervisión de control digital, especificando los tipos de
interfaces de comunicación.
6
- Alcanzar un grado de desarrollo tecnológico que se ajuste a las nuevas exigencias
de la industria de la automatización y del control estadísticos de procesos.
- HIPÓTESIS.- .- El diseño de un HARDWARE E IMPLEMENTARLO EN
UN SOFTWARE permitirá la comunicación entre el computador y el medio externo a
través de sensores de temperatura.
FOTO 4
FUENTE: EL AUTOR
FOTO 5

7
FUENTE: EL AUTOR
1.4 METODOLOGIA.- Para ello tenemos.
MÉTODOS Y TÉCNICAS.
Para la investigación se utilizará las siguientes técnicas.
A) MÉTODO INDUCTIVO.- Pues parte de lo particular a lo general al señalar que
el sensor de temperatura podrá adaptarse a diversos ambientes pueden ser estos un
edificio en construcción en donde activara una alarma en caso de incendio o en la
Industria al vigilar la temperatura de calderos y así indicar si esta o no a nivel de la
temperatura permitida.
B) OBSERVACIÓN DE CAMPO.- Al ver los requerimientos que podrían contribuir
al bienestar social lo mejor es prevenir que lamentar . Muchas personas o empresas

8
pueden perder su vida o posesiones debido a que no han sido advertidas
convenientemente de peligro por este motivo se ha observado conveniente crear una
tarjeta DAQ con censor de temperatura para que advierta de este peligro.
1.4.- SISTEMAS SCADA Y HMI1 La respuesta nos aclara el concepto.
QUÉ ES EL SOFTWARE SCADA?QUÉ ES EL SOFTWARE SCADA?QUÉ ES EL SOFTWARE SCADA?QUÉ ES EL SOFTWARE SCADA?
El software SCADA es aquél que permite ver en una pantalla el esquema de
una instalación controlada por autómatas y sobre ésta se reflejan los valores clave y se
pueden variar las consignas.
FOTO 6
FUENTE: EL AUTOR
1 INSTRUPEDIA 99 , NATIONAL INSTRUMENTS , www.natinst.com .

9
Imaginemos un depósito de agua en el que hemos incorporado un sensor de
temperatura y una resistencia.
Nuestro sistema intenta mantener el agua a la temperatura de consigna de 43º
que hemos definido. En la pantalla veremos la temperatura real medida por el sensor
y podremos programar una nueva consigna.
Si entra agua fría en el depósito, el sistema activará la resistencia para alcanzar de
nuevo la temperatura deseada. Mientras tanto, por pantalla monitorizaremos todo el
proceso.
FOTO 7
FUENTE: EL AUTOR
El sistema SCADA (Supervisión Control y Adquisición de Datos) es un sistema
utilizado actualmente en el control de procesos, que puede ser desarrollado bajo
10
cualesquier plataforma que permita al usuario visualizar de manera fácil el proceso
monitoreado, las ventajas que se obtienen al utilizar sistemas SCADA son:
• Interface gráfica para el usuario (GUI).
• Control de la tendencia histórica (Trending).
• Fijación de parámetros de control (PID) y alarmas.
• Intercambio dinámico de datos (DDE).
• Flexibilidad para manejo de protocolos como Modbus, Serial, etc.
• Procesamiento de datos OLE para control de procesos.
En necesario aclarar que el sistema SCADA involucra tanto software como
hardware es decir se trata de un lazo completo de control que puede valerse de
técnicas digitales como analógicas, no así los sistemas HMI que son netamente el
lenguaje de programación gráfico.
La figura muestra un sistema SCADA, en el cual se pueden observar el empleo
de diferentes plataformas para la adquisición de datos como Bus GPIB(Bus de
interface de propósito General), plataforma SCXI (Instrumentos extendidos y señales
acondicionadas), protocolos de puertos seriales (Mod Bus protocolo Modicom bus).

11
Figura 1.1 - Esquema típico de un sistema SCADA
Los sistemas HMI ( Human-Machine Interface) son plataformas gráficas de
programación sobre las cuales se desarrollan los programas de aplicación (software),
estos sistemas ofrecen al usuario monitorear en tiempo real un proceso industrial y
además realizar un control estadístico del mismo (SPC statistical process control).
12
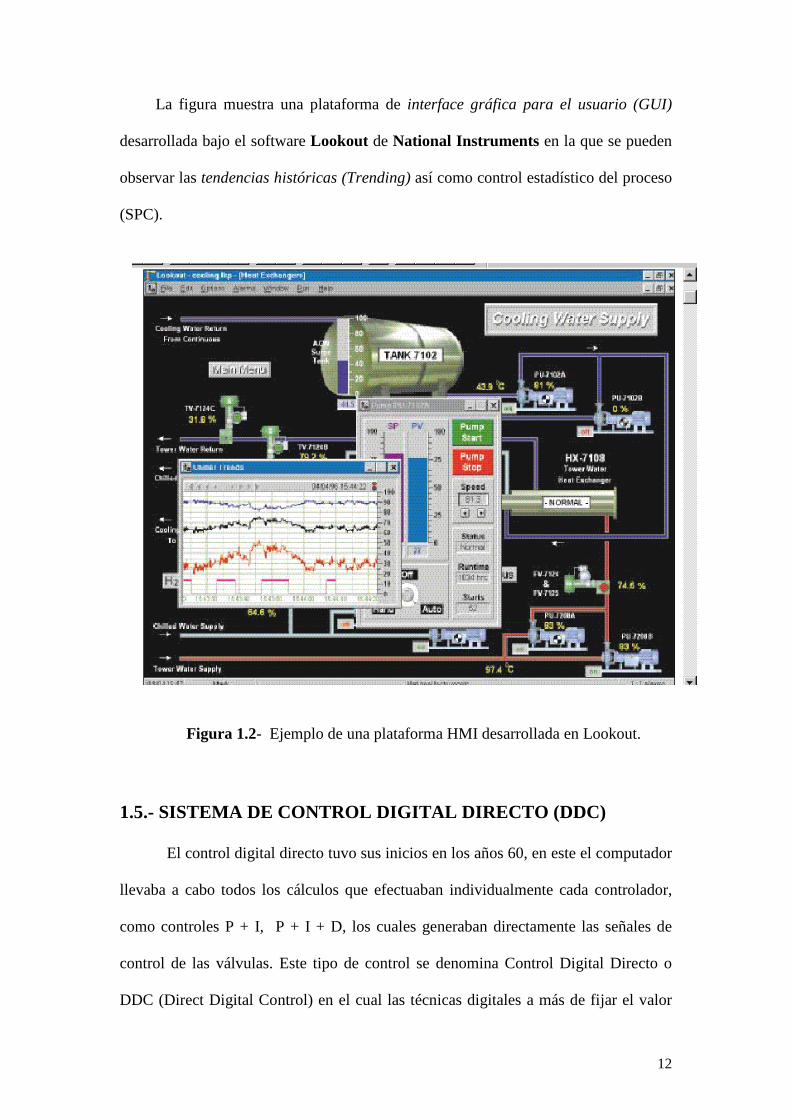
La figura muestra una plataforma de interface gráfica para el usuario (GUI)
desarrollada bajo el software Lookout de National Instruments en la que se pueden
observar las tendencias históricas (Trending) así como control estadístico del proceso
(SPC).
Figura 1.2- Ejemplo de una plataforma HMI desarrollada en Lookout.
1.5.- SISTEMA DE CONTROL DIGITAL DIRECTO (DDC)
El control digital directo tuvo sus inicios en los años 60, en este el computador
llevaba a cabo todos los cálculos que efectuaban individualmente cada controlador,
como controles P + I, P + I + D, los cuales generaban directamente las señales de
control de las válvulas. Este tipo de control se denomina Control Digital Directo o
DDC (Direct Digital Control) en el cual las técnicas digitales a más de fijar el valor
13
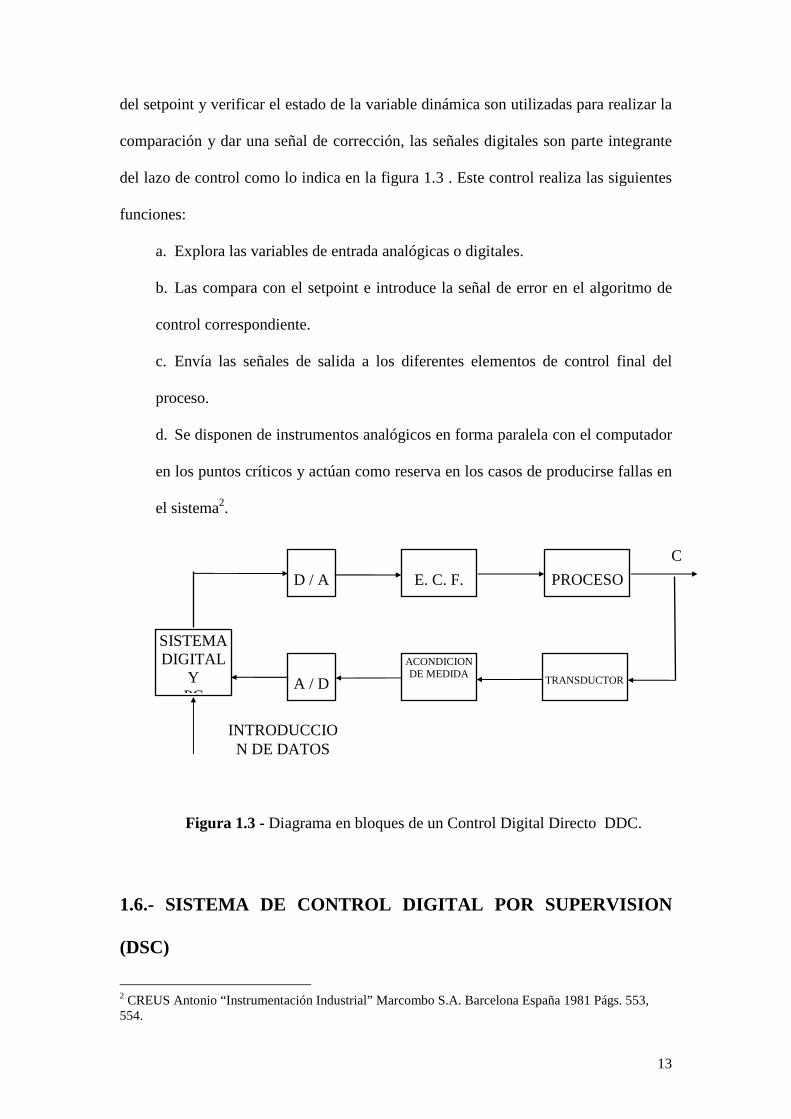
del setpoint y verificar el estado de la variable dinámica son utilizadas para realizar la
comparación y dar una señal de corrección, las señales digitales son parte integrante
del lazo de control como lo indica en la figura 1.3 . Este control realiza las siguientes
funciones:
a. Explora las variables de entrada analógicas o digitales.
b. Las compara con el setpoint e introduce la señal de error en el algoritmo de
control correspondiente.
c. Envía las señales de salida a los diferentes elementos de control final del
proceso.
d. Se disponen de instrumentos analógicos en forma paralela con el computador
en los puntos críticos y actúan como reserva en los casos de producirse fallas en
el sistema2.
Figura 1.3 - Diagrama en bloques de un Control Digital Directo DDC.
1.6.- SISTEMA DE CONTROL DIGITAL POR SUPERVISION
(DSC)
2 CREUS Antonio “Instrumentación Industrial” Marcombo S.A. Barcelona España 1981 Págs. 553, 554.
INTRODUCCION DE DATOS
D / A
A / D
E. C. F.
ACONDICION DE MEDIDA
PROCESO
TRANSDUCTOR
SISTEMA DIGITAL
Y PC
C
14
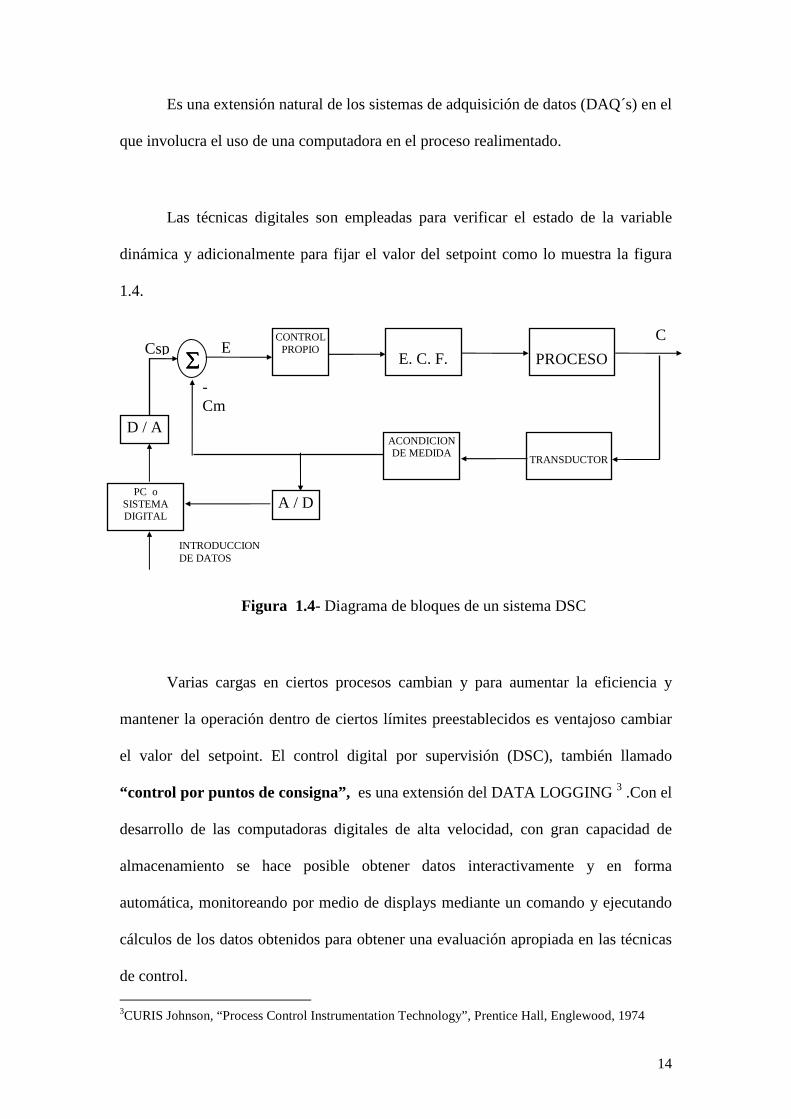
Es una extensión natural de los sistemas de adquisición de datos (DAQ´s) en el
que involucra el uso de una computadora en el proceso realimentado.
Las técnicas digitales son empleadas para verificar el estado de la variable
dinámica y adicionalmente para fijar el valor del setpoint como lo muestra la figura
1.4.
Figura 1.4- Diagrama de bloques de un sistema DSC
Varias cargas en ciertos procesos cambian y para aumentar la eficiencia y
mantener la operación dentro de ciertos límites preestablecidos es ventajoso cambiar
el valor del setpoint. El control digital por supervisión (DSC), también llamado
“control por puntos de consigna”, es una extensión del DATA LOGGING 3 .Con el
desarrollo de las computadoras digitales de alta velocidad, con gran capacidad de
almacenamiento se hace posible obtener datos interactivamente y en forma
automática, monitoreando por medio de displays mediante un comando y ejecutando
cálculos de los datos obtenidos para obtener una evaluación apropiada en las técnicas
de control.
3CURIS Johnson, “Process Control Instrumentation Technology”, Prentice Hall, Englewood, 1974
CONTROL PROPIO
A / D
E. C. F.
ACONDICION DE MEDIDA
PROCESO
TRANSDUCTOR
PC o SISTEMA DIGITAL
C
∑∑∑∑
D / A
INTRODUCCION DE DATOS
Csp E
- Cm
15
1.7.- TIPOS DE COMUNICACIÓN De los cuales tenemos.
1.7.1.- PUERTO SERIE4
El puerto serie o puerto RS-232 en los computadores personales es muy útil
para controlar periféricos, interconexión con dispositivos tales como mouses,
impresoras, microcontroladores, ordenadores, etc. Los canales seriales de la PC son
programables, su comunicación es asíncrona y nos brinda la posibilidad de programar
los bits de datos, bits de arranque, bits de parada, bits de paridad.
En la comunicación serial la información se transmite bit a bit por una o dos
líneas de enlace de datos, lo que hace que disminuya significativamente el número de
líneas; además la distancia de comunicación que puede ser extremadamente grande,
para lo cual se ayuda de los equipos llamados módem. En la figura se presenta un
ejemplo de comunicación serie.
Ventajas:
• Los canales seriales (COM1, COM2, etc.) son totalmente programables.
• Permite programar los bits de paridad y los bits de parada.
• Dispone de un sistema priorizador de interrupciones, que controla las
interrupciones de transmisión, recepción, error y línea de estado.
• Existen recursos de diagnóstico a través de funciones loop back o lazo de
realimentación.
Desventajas:
4RICARDO ZELENOVSKY “IBM PC Para Ingenieros” E.S.P.E (Facultad de Ingeniería Electrónica), Quito Ecuador, 1995 Cap. X.

16
• Permite solamente comunicación asíncrona.
• Requiere de más tiempo para la transmisión de datos.
Las señales del puerto serial de la PC están disponibles en un conector tipo D,
macho de 9 o 25 pines, este conector generalmente se encuentra en la parte posterior
del computador.
Figura 1.5 - Ejemplo de comunicación serial
1.7.2.- MODOS DE TRANSMISIÓN
Modo Símplex: Se transmite los datos en una sola dirección ejemplo del PC a
la impresora.
Modo Dúplex (Half Dúplex): Se transmiten los datos en forma alterna, en este
modo de comunicación la transmisión es en los dos sentidos pero no al mismo
instante.
TXD
RXD
GND
RXD TXD GND
1
1
MICROCONTROLADOR
C.P.U

17
Modo Full Dúplex: Se transmite o se recibe datos al mismo tiempo por una
sola línea virtual.
1.7.3.- PUERTO PARALELO
El puerto paralelo también conocido como el puerto de la impresora, permite la
conexión con impresoras paralelas, también puede usarse como puerto I / O genérico
y para comunicación entre PCs. En la figura 1.6 se observa un ejemplo.
Figura 1.6- Ejemplo de comunicación paralelo.
Ventajas:
• Tiene una velocidad de comunicación muy alta (velocidad de compuerta).
Desventajas:
• Necesita un cable físico para cada línea.
• Se utiliza líneas independientes para la transmisión y recepción de datos.
• Sólo se puede utilizar a cortas distancias (máximo 7 metros).
• Necesita de un programa dedicado.
DISPO - SITIVO TX
1
2
8
DISPO - SITIVO RX
1
2
8
bits bits

18
El puerto paralelo se representa por las letras LPT1 (puerto paralelo 1) LPT2
(puerto paralelo 2), todos los pines de I/O están disponibles en un conector tipo D de
25 pines hembra en la parte posterior del computador.
1.8 ACONDICIONAMIENTO DE SEÑALES. De los cuales tenemos.
1.8.1 MÓDULOS SCSI (SEÑALES ACONDICIONADAS PARA LA
INSTRUMENTACIÓN)
Los dispositLos dispositLos dispositLos dispositivos SCSIivos SCSIivos SCSIivos SCSI
En teoría, los dispositivos deben ser independientes de las operaciones del
procesador. El ordenador solo necesita enviar los mandatos y los datos al periférico y
esperar una respuesta (las impresoras. por ejemplo. tabajan de esta manera).
FOTO 8

19
FUENTE: EL AUTOR
En la actualidad, los puertos paralelo y serie son puertos específicos para
dispositivos, de modo que el PC se limita a enviar la información al puerto,
independientemente del dispositivo conectado, y no reconoce de forma automática (es
decir, sin la intervención de controladores o del sistema operativo) cuál es el
periférico que se está utilizando. Esto permite, por ejemplo, que dispositivos antiguos
puedan funcionar en ordenadores recientes. En síntesis, es el concepto que emplea la
interfaz SCSI. Los ordenadores y dispositivos se diseñan e integran sin la necesidad
de asegurar compatibilidades de hardware concretas, que se aseguran por las
especificaciones de la interfaz.
SCSI, que en términos de bus es un conjunto de cables, hilos y terminadores,
cada uno con su nombre y propósito concretos. utiliza un conjunto limitado de
instrucciones mandatos que permiten que tanto el sistema como el dispositivo se
comuniquen a través del bus. Para ello se basan en el principio de independencia del
dispositivo, característico de esta interfaz y una de sus propiedades principales. Por
ejemplo, todas las unidades de disco duro se consideran semejantes en la interfaz
SCSI (a excepción de su capacidad total) y, para una clase de dispositivos concreta,
puede reemplazarse un disco instalado por otro nuevo, sin tener que modificar la
configuración del sistema.
Dado que la iniciativa en la configuración y la comunicación reside en el
dispositivo y no en el sistema, el ordenador es capaz de utilizar un reducido conjunto
de mandatos estándar para garantizar la transferencia de datos hacia y desde el
dispositivo.
20
Adaptadores SCSIAdaptadores SCSIAdaptadores SCSIAdaptadores SCSI
De forma similar al control de los discos duros para interfaz IDE, que se
efectúa mediante una tarjeta específica (incorporada a la placa base en casi todos los
modelos), los dispositivos SCSI utilizan un adaptador conocido como controladora
SCSI o simplemente, tarjeta SCSI, que desde el punto de vista lógico de la interfaz se
considera un dispositivo más. Actúa de puente entre el bus SCSI y el bus interno de
entrada/salida del PC, enviando y recibiendo los mandatos necesarios y transfiriendo
los datos de los dispositivos conectados al bus SCSI.
Iniciadores y objetivosIniciadores y objetivosIniciadores y objetivosIniciadores y objetivos
Básicamente, en un bus SCSI existen dos tipos de dispositivos: los iniciadores
y los objetivos. Los primeros inician el proceso de comunicación cuando debe
realizarse alguna tarea, mientras que los segundos responden a los mandatos e
instrucciones de los iniciadores. Esta relación no se establece en un único sentido, ya
que un dispositivo físico puede actuar a la vez como iniciador y como objetivo
durante la transferencia de datos.
Un bus SCSI puede soportar varios dispositivos de forma simultánea pero en
todo momento debe existir un iniciador y un objetivo. Aunque no sea necesariamente
así siempre, en general, el adaptador SCSI (la tarjeta de expansión instalada en la
ranura de la placa base) es el iniciador y los otros dispositivos (discos duros, lectoras
o grabadoras de CD-ROM, por ejemplo) son los objetivos.
21
IdentificadoreIdentificadoreIdentificadoreIdentificadoressss
Un bus SCSI puede soportar un número elevado de dispositivos, pero para
evitar cualquier conflicto en la comunicación, cada uno de ellos debe identificarse de
manera individual. Si el bus admite hasta ocho dispositivos, cada uno de ellos se
identifica con un número (ID) que puede tener un valor desde 0 hasta 7, o un valor
comprendido entre 0 y 15, cuando son 16 los dispositivos soportados (incluyendo el
adaptador, que se considera un dispositivo SCSI más).
La negociaciónLa negociaciónLa negociaciónLa negociación
Dado que el cable utilizado para el bus SCSI es común a todos los
dispositivos, cada uno de ellos debe obtener permiso de todos los restantes antes de
tomar el control del bus, lo que se conoce como fase de arbitraje. En la fase de
selección cuando uno de los dispositivos ha tomado el control (normalmente, el
adaptador), procede a contactar con el dispositivo con el que debe comunicarse. Una
vez establecido el contacto, comienza en realidad el proceso de comunicación.
Las distintas fases que intervienen en este proceso forman parte de lo que se
conoce como negociación, que lleva a cabo un dispositivo de la cadena SCSI para
acceder y utilizar el bus, y que comienza cuando el bus está libre. Esta circunstancia
es conocida por todos los dispositivos mediante una señal específica, denominada
BSY, que reciben por uno de los conductores del cable.
Se procede entonces a cambiar esta señal (de manera que el resto de
dispositivos detecten el nuevo estado del bus) y se envía una señal por el conductor
del cable correspondiente a su identificador.

22
Cables y conectoresCables y conectoresCables y conectoresCables y conectores
La interfaz SCSI utiliza una topología de bus concreta. Cada uno de los
dispositivos conectados al bus debe estar encadenado de forma lineal al dispositivo
que le precede mediante un cable apropiado, por lo que el conjunto de dispositivos
recibe el nombre de cadena SCSI. Se trata de una característica obligatoria. así que
los dispositivos (incluyendo el adaptador) se conectan a uno o dos dispositivos más y
nunca a un número mayor.
Los conectores SCSILos conectores SCSILos conectores SCSILos conectores SCSI
En la actualidad, existen ocho tipos distintos de conexiones SCSI (cuatro si no
se diferencia entre conectores macho o hembra) incluyendo todas las aparecidas desde
la publicación de las especificaciones oficiales de 1986, cuando la interfaz SASI se
tomó como base para cl estándar SCSI.
FOTO 9
23
FUENTE : EL AUTOR
Los terminadoresLos terminadoresLos terminadoresLos terminadores
Terminadores pasivos, que son los más antiguos y sencillos, indicados para los
buses de velocidad reducida (SCSI simple).
Terminadores activos, similares a los anteriores pero con reguladores de
voltaje que aportan mayor consistencia en la terminación del bus y que resultan
indicados desde Fast SCSI hasta Ultra SCSI.
Por último, los terminadores FPT (Forced Perfect Termination, terminación
perfecta forzada). Representan el tipo de terminadores más avanzado y además de
reguladores de voltaje, utilizan diodos. Esto elimina prácticamente la posibilidad de
que se refleje la señal. Ambos terminadores deben instalarse al final de la cadena
SCSI, después de los últimos dispositivos, incluyendo los que puedan desconectarse
24
de la alimentación eléctrica mediante un interruptor o los que no se usen
temporalmente.
CABLES SCSI CABLES SCSI CABLES SCSI CABLES SCSI
Cable A Cable original estándar con 50 conductores. Se utiliza para buses de ocho
bits y en dos configuraciones diferentes:
normal (en general para dispositivos internos) y de alta densidad (más
estrecho)
Cable B Para el estándar SCSI-2 y en los protocolos Wide SCSI. Prácticamente en
desuso. Se combina con un cable A para poder disponer de los 68
conductores necesarios en buses de 16 bits.
Cable P Cable de 68 conductores, definido en el estándar SCSI-3. Reemplaza la
combinación de cables A y B más antigua en los buses de 16 bits.
TIPOS DE DISPOSITIVOS TIPOS DE DISPOSITIVOS TIPOS DE DISPOSITIVOS TIPOS DE DISPOSITIVOS
Acceso aleatorio Escáneres
(discos duros) Discos magnetoópticos
Acceso secuencial Dispositivos de comunicación
(unidades de cinta) Escáneres
Impresoras Discos magnetoópticos
Unidades de CD-ROM Dispositivos de comunicación
FOTO 10
25
FUENTE: EL AUTOR
Los estándaresLos estándaresLos estándaresLos estándares
Cada uno de los protocolos SCSI se engloba en uno de los estándares
aprobados por el comité ANSI, cuyas especificaciones se detallan en la
documentación oficial. Estos estándares son:
SCSISCSISCSISCSI----1111
Desde 1986. Es el más antiguo y se basa en buses de ocho bits y transferencia
asíncrona para todos los comandos y datos. Utiliza tecnología bipolar y terminaciones
pasivas. Los conectores, tanto internos como externos, son de 50 patillas (el conector
externo se conoce como Centronics 50).
26
SCSISCSISCSISCSI----2222
Desde 1994. Utiliza transferencia asíncrona para el envío de comandos y
síncrona para los datos. Permite terminadores pasivos y activos y señales diferenciales
(tecnología denominada HVD, High Voltage Differential o diferencial de alto voltaje).
Para los protocolos Wide (de 16 bits), se usan conectores B de 68 patillas.
SCSISCSISCSISCSI----3333
A partir de 1996. Es una colección de documentos que cubren las
especificaciones físicas, el protocolo básico de la intcrfaz y el conjunto de mandatos
primarios. Cada uno de estos documentos tiene sus propias versiones y revisiones.
Los principales son:
SPI (SCSI Parallel Interface)SPI (SCSI Parallel Interface)SPI (SCSI Parallel Interface)SPI (SCSI Parallel Interface)
Define las conexiones y señales eléctricas del bus SCSI paralelo, incluyendo el
cable y conector P de alta densidad, con 68 patillas.
FastFastFastFast----20202020
Conocido también con el nombre de Ultra SCSI, contiene las secciones en las
que se define la interfaz de bus ancho que duplica la transferencia de SPI.
FastFastFastFast----40404040
27
Especificaciones de la interfaz SPI-2 (correspondiente al protocolo Ultra2
SCSI que alcanza un ancho de banda de hasta unos 80 MB/s, con una nueva interfaz
eléctrica LVD (Low Voltage Differential, diferencial de bajo voltaje).
SPISPISPISPI----3333
Cubre las especificaciones de la interfaz Fast-80DT conocida con el nombre
de Ultra3 SCSI, en la que se introduce corrección de errores CRC (Cyclic
Redundancy Check, comprobación de redundancia cíclica).
EPI (EPI (EPI (EPI (EnhanEnhanEnhanEnhanced Parallel Interface, ced Parallel Interface, ced Parallel Interface, ced Parallel Interface, interfazinterfazinterfazinterfaz paralela ampliada)paralela ampliada)paralela ampliada)paralela ampliada)
Documentación técnica que describe el diseño de sistemas SCSI. Entre otros
aspectos, detalla la longitud de los cables y los parámetros eléctricos que permiten
combinar en un mismo sistema dispositivos para bus normal (50 polos) y ancho (68
polos).
CARACTERISTICAS BASICAS CARACTERISTICAS BASICAS CARACTERISTICAS BASICAS CARACTERISTICAS BASICAS
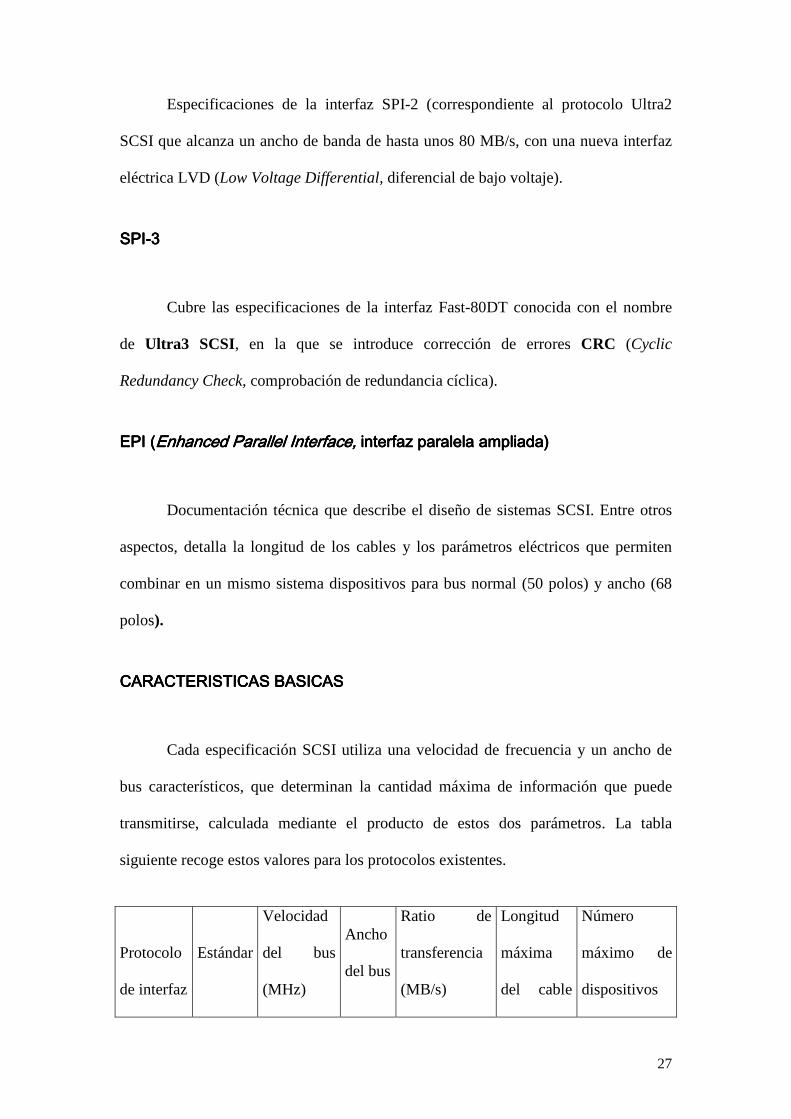
Cada especificación SCSI utiliza una velocidad de frecuencia y un ancho de
bus característicos, que determinan la cantidad máxima de información que puede
transmitirse, calculada mediante el producto de estos dos parámetros. La tabla
siguiente recoge estos valores para los protocolos existentes.
Protocolo
de interfaz
Estándar
Velocidad
del bus
(MHz)
Ancho
del bus
Ratio de
transferencia
(MB/s)
Longitud
máxima
del cable
Número
máximo de
dispositivos

28
SE (m) por bus
SCSI SCSI-l 5 8 4.77 6 8
Fast SCSI SCSI-2 10 8 9.54 3 8
Wide
SCSI SCSI-2 5 16 9.54 6 16
Fast Wide
SCSI SCSI-2 10 16 19.07 3 16
Ultra
SCSI SCSI-3 20 8 19.07 1.5 (**) 8
Ultra
Wide
SCSI
SCSI-3 20 16 38.15 1.5 (**) 16
Ultra2
SCSI SCSI-3 40 8 38.15 12 (LVD) 8
Ultra2
Wide
SCSI
SCSI-3 40 16 76.29 12 (LVD) 16
Ultra3
SCSI SCSI-3 40 (*) 16 152.59 12 (LVD) 16
(*) Ultra3 y la implementación Ultra 160/m. utilizan la misma frecuencia que Ultra2,
si bien envían dos bytes por cada ciclo de reloj. Esto puede inducir a concluir
erróneamente que utilizan buses de 32 bits.
29
(**) Ultra SCSI y Ultra Wide SCSI pueden utilizar también cables con una distancia
máxima entre dispositivos de cuatro metros, aunque en este caso el número máximo
de éstos se reduce a cuatro y ocho respectivamente.
1.8.2 PLATAFORMAS VXI.1.8.2 PLATAFORMAS VXI.1.8.2 PLATAFORMAS VXI.1.8.2 PLATAFORMAS VXI.---- Los sistemas basados en VXI ofrecen otras
ventajas que van más allá del alto número de puntos de medida. Hay una gama
extraordinariamente amplia de conmutadores con diversas topologías y componentes
de conmutación. Incluyen conmutadores de armadura, de láminas, de estado sólido,
de RF y de microondas. Se pueden configurar en escáners, multiplexores y matrices o
elementos de conmutación para usos generales. Se pueden optimizar para velocidad
de conmutación, frecuencia, potencia, resistencia de contacto, fiabilidad o
flexibilidad. El VXI ofrece dos tamaños de módulos, los "B" y "C". El tamaño "C"
ofrece el mayor número de puntos de relés. El tamaño "B" más pequeño ofrece una
densidad de relés reducida a un precio inferior. Los módulos del tamaño "B"
funcionan también muy bien en un equipo principal de tamaño "C", mediante el uso
de un adaptador.
En resumen, puede decirse que el VXI ofrece un medio excepcional de
solucionar los problemas y aprovechar las oportunidades creadas por los cambios que
se están produciendo en la industria electrónica. Proporciona una solución muy
conveniente para tratar las aplicaciones de medidas existentes y de nueva aparición,
que implican una gran variedad y un gran número de puntos y bloques asociados de
información.
30
Su factor de forma proporciona la proximidad necesaria a los DUTs
(dispositivos bajo prueba) y su excelente selección de topologías de conmutadores y
configuraciones de relés la convierten en una solución muy atractiva.
FOTO 11
FUENTE: EL AUTOR
Esta capacidad de conmutación y la flexibilidad de sus soluciones de
interconexión, combinadas con el excepcional entorno operativo estrechamente
acoplado y la coordinación de la temporización, hacen que el VXI resulte una opción
muy atractiva.
1.8.3 MÓDULOS PXI (Componentes periféricos para la
instrumentación).

31
El diseño de la instrumentación es un campo competitivo, y los fabricantes se
están esforzando constantemente aumentar funcionalidad mientras que
simultáneamente reducen el tiempo-a-mercado y el coste. Para resolver estas
demandas, los sistemas de la instrumentación se han desarrollado más de cerca a la
palancada que existía, tecnologías disponibles. El estándar modular de la
instrumentación de PXI, adoptado en 1998, es sí mismo un estudio en la tecnología
existente del leveraging para entregar el alto rendimiento, instrumentación modular
del bajo costo. Es estas calidades que condujeron 38 por ciento de crecimiento del
mercado de PXI en 2001, según un informe de la industria por Frost y Sullivan, un
año en que la mayoría de las otras plataformas de la prueba consideraron
declinaciones grandes.
Dos elementos dominantes de un estándar modular de la instrumentación son
la interconexión del módulo y el empaquetado (o forme el factor). En esta generación
más reciente de instrumentos, los diseñadores dieron vuelta al autobús componente
periférico de la interconexión (PCI) debido a su velocidad, su tarifa de transferencia
de explosión de 132 Mbytes/sec es casi 10 por el de estándares anteriores, y sus
modos numerosos para el control de módulo. Otra ventaja de usar el PCI era que los
diseñadores podrían dibujar del mercado extenso del ordenador personal (PC) para los
componentes del software y del bajo costo.
32
Aunque la PC era un recurso excelente, el empaquetado de escritorio de la PC
no fue satisfecho a los ambientes industriales exigentes previstos para los nuevos
diseños del instrumento. Las PC no fueron diseñadas para los ambientes industriales,
y por lo tanto no proporcionan la conectividad, la ayuda que se refrescaba, la
resistencia de la EMI, y la capacidad de la ranura necesitada para muchos sistemas de
alto rendimiento de la instrumentación. Para solucionar estos problemas, los
diseñadores adoptaron ruggedized el estándar de la Euro-Tarjeta para empaquetar.
Este acceso permitido a la historia larga del diseño y a la amplia ayuda del
vendedor para los diseños del tablero y del recinto. Con la interconexión de menor
importancia y los cambios de empaquetado, el estándar de CompactPCI fue propuesto
y tiene desde aceptación en el mercado de aumento ganada.
Sin embargo la coordinación de las operaciones del multi-módulo exigió
funcionalidad adicional. Las extensiones de VMEbus para el estándar de la
instrumentación (VXI), un estándar modular anterior del instrumento, demostraron la
ventaja de incluir señales auxiliares tales como una referencia común de la frecuencia
del sistema, disparadores controlados de la sincronización, y un sistema genérico que
33
señalaba banderas. Otra vez con una cierta modificación, el sistema de la señal del
auxiliar VXI fue agregado al estándar de CompactPCI para formar las extensiones del
PCI para el estándar de la instrumentación (PXI). Por diseño, la mayoría de los
productos de PXI son completamente inter-operables con los productos de
CompactPCI.
FOTO 12
FUENTE: EL AUTOR
De sus raíces en el ordenador personal dinámico (PC), la Euro-Tarjeta rugosa,
y los mercados de la herencia VXI, la especificación de PXI está proporcionando la
dirección para una nueva generación de un rendimiento más alto, equipo de prueba de
un costo más bajo.
¿Cómo utilizo PXI?
34
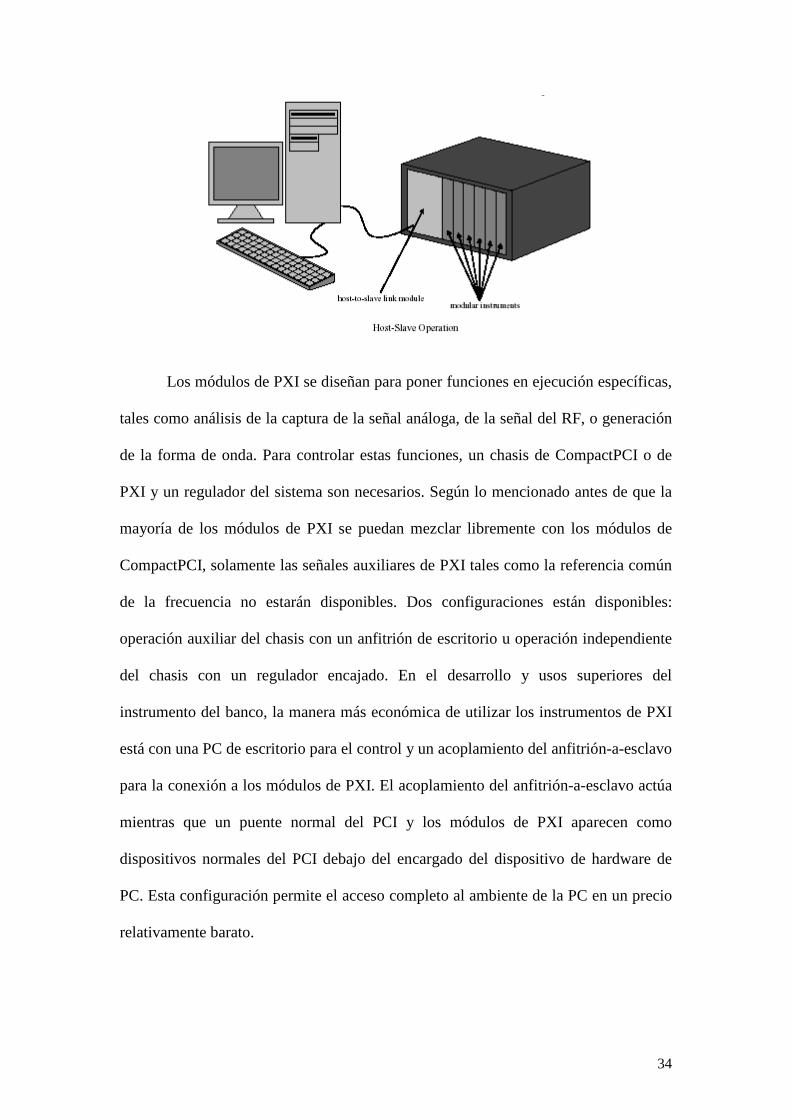
Los módulos de PXI se diseñan para poner funciones en ejecución específicas,
tales como análisis de la captura de la señal análoga, de la señal del RF, o generación
de la forma de onda. Para controlar estas funciones, un chasis de CompactPCI o de
PXI y un regulador del sistema son necesarios. Según lo mencionado antes de que la
mayoría de los módulos de PXI se puedan mezclar libremente con los módulos de
CompactPCI, solamente las señales auxiliares de PXI tales como la referencia común
de la frecuencia no estarán disponibles. Dos configuraciones están disponibles:
operación auxiliar del chasis con un anfitrión de escritorio u operación independiente
del chasis con un regulador encajado. En el desarrollo y usos superiores del
instrumento del banco, la manera más económica de utilizar los instrumentos de PXI
está con una PC de escritorio para el control y un acoplamiento del anfitrión-a-esclavo
para la conexión a los módulos de PXI. El acoplamiento del anfitrión-a-esclavo actúa
mientras que un puente normal del PCI y los módulos de PXI aparecen como
dispositivos normales del PCI debajo del encargado del dispositivo de hardware de
PC. Esta configuración permite el acceso completo al ambiente de la PC en un precio
relativamente barato.

35
Para muchos otros usos, los instrumentos de PXI residirán en última instancia
en un estante con el otro equipo tal como encendido un piso de la fábrica o se desea la
operación alejada del sitio o portable. En estos ajustes el uso de las PC del tablero del
escritorio no es factible y una PC encajada debe ser utilizada. Un monitor y un teclado
pueden ser unidos al regulador para el desarrollo o eliminar errores y después ser
quitados o ser substituidos por una conexión del LAN para un uso más último. Esta
configuración es algo más alta en coste pero permite la mayoría de la flexibilidad de
tamaño del ajuste operacional y de un sistema más pequeño. (Adaptado de un artículo
por la visita de ZTEC Inc. el Web site de ZTEC en www.ztec-inc.com)
36
1.9 INTERFACE DE COMUNICACIÓN GPIB IEEE486.- Encontramos
Instrumentación programada: En los tiempos actuales, el precio de la mano de obra
supone uno de los costes más onerosos en los procesos de verificación y ensayo.
Además se debe tener en cuenta la posibilidad del error humano en un proceso
de test medianamente duradero. La instrumentación programada ofrece una solución
técnica y económica al problema, mediante la explotación de los interfaces de
instrumentación más estándar como son GPIB, VXI y el puerto serie RS-232. El otro
campo de trabajo de este grupo consiste en el diseño y/o explotación de los sistemas
de adquisición de datos procedentes de variables físicas mediante transductores,
dentro del cual se encuentran las tarjetas de adquisición de datos, registradores, etc.
La experiencia adquirida por este grupo de trabajo trata de alcanzar la solución
óptima con el mínimo coste en equipamiento y mantenimiento, por parte del usuario.
Tal vez uno de los patrones más importantes es la interfase digital IEEE 488,
para prueba de instrumentación programable y otros equipos. Estandarizar la interfase
entre equipos de prueba permite la conexión entre piezas de equipo de prueba de
laboratorio, sin importar su fabricación para crear avanzados sistemas de equipo de
prueba automáticos ATE (Automatic Test Equipment).
FOTO 13

37
FUENTE: EL AUTOR
El bus GPIB se basa en la transmisión de palabras de datos de ocho bits, con
un bus de datos paralelo de ocho líneas. Se utiliza varios bits de estado para aumentar
el datos de ocho bits pero se transmiten por líneas separadas. El sistema 488 es
básicamente un sistema de corta distancia para equipos de prueba montados en un
gabinete dentro de una misma habitación y no para la transmisión a largas distancias,
vía telefónica ni por cualquier otro medio de comunicación. Las 16 señales activas :
* Bus de datos (8 líneas)
* Bus de control de transferencia de datos Handshake (3 líneas).
* Bus para el control general de la interconexión (5 líneas).
38
CAPITULO II
EL PUERTO PARALELO O LPT1
Historia, evolución y tipos de puertos paralelos
Historia
En 1981, la IBM (International Business Machines) introdujo la Computadora
Personal (PC). El puerto paralelo (Standart Parallel Port SPP) estaba incluido en el
primer PC y se agregó a éste como una alternativa al bajo rendimiento del puerto
serial, para utilizarlo como controlador de las impresoras de matriz de punto de alto
desempeño. Este puerto tenía la capacidad de transmitir 8 bits de datos a la vez (del
PC a la impresora), mientras que el puerto serial lo hacía de uno en uno. En el
momento que el puerto paralelo fue presentado, las impresoras de punto fueron el
principal dispositivo externo que se conecto a éste. Al hacerse extensamente utilizado,
el puerto paralelo llegó a ser la respuesta para conectar dispositivos más rápidos.
Después de este inicio, tres grandes grupos de problemas aparecieron a los
desarrolladores y usuarios de este puerto: Primero, aunque éste había aumentado su
velocidad considerablemente, no había cambio en la arquitectura o desempeño. La
máxima velocidad de transferencia alcanzable estaba por los 150 kbyte /seg. y era
extremadamente dependiente del software. Segundo, no había un estándar para la
interfase eléctrica. Esto causaba muchos problemas cuando se quería garantizar la
operación en múltiples plataformas. Por último, la forma de diseño que le dieron,
limitaba la distancia de los cables externos hasta un máximo de 1,8 metros. En 1991
hubo una reunión de fabricantes de modo que se pudiera desarrollar un nuevo
39
estándar para el control inteligente de impresoras a través de una red. Estos
fabricantes, donde estaban incluidos Lexmark, IBM, Texas Instruments y otros,
formaron la Network Printing Alliance (NPA), como una respuesta a estas
necesidades.
Evolución
Desde la introducción del PC al mercado, el puerto paralelo ha sufrido varias
modificaciones para hacerlo más veloz. Ya que el puerto original era unidireccional,
se creó el puerto bidireccional. El puerto bidireccional fue introducido con el PS/2
compatible. Este permite una comunicación de 8 bits en ambas direcciones. Algo
interesante de notar es que el puerto original tenía la posibilidad de ser bidireccional
realizando una conexión entre dos pines de un componente electrónico que venía
incluido en éste. (Dicho de otro modo, el puerto original es bidireccional en diseño
básico, pero no en el diseño operacional). Finalmente se han creado el Enhanced
Parallel Port (EPP) y el Extended Capability Port (ECP). Estos dos últimos son al
puerto estándar como el Pentium al 286, además de ser bidireccionales.
Inicialmente el puerto paralelo se utilizó para la comunicación con impresoras.
Actualmente se utiliza también para manejar otros periféricos como CD ROM, cintas
de copia de respaldo, discos duros, tarjetas de red, protectores de copia, scanners, etc.
Tipos de puerto paralelo
En la actualidad se conoce cuatro tipos de puerto paralelo:
o Puerto paralelo estándar (Standart Parallel Port SPP)
o Puerto Paralelo PS/2 (bidireccional)
40
o Enhanced Parallel Port (EPP)
o Extended Capability Port (ECP)
En la siguiente tabla se muestra información sintetizada de cada uno de estos
tipos de puertos.
SPP PS/2 EPP ECP
Fecha de
Introducción
1981 1987 1994 1994
Fabricante IBM IBM Intel, Xircom y
Zenith Data
Systems
Hewlett
Packard y
Microsoft
Bidireccional No Si Si Si
DMA No No No Si
Velocidad 150 Kbyte/seg. 150 Kbytes/seg. 2 Mbytes/seg. 2 Mbytes/seg.
Manejo del puerto paralelo
En las aplicaciones que involucran el computador y la adquisición de datos es
necesario emplear alguno de los puertos del computador, o bien realizar la aplicación
enfocada a trabajar con una tarjeta de expansión, ya sea de estándar ISA (casi
desaparecido) o bien con tecnología PCI. Estas dos ultimas opciones, a pesar de ser
completamente posibles no se consideran adecuadas puesto que son tecnologías
cambiantes, que obligan a una renovación del hardware de la aplicación, además de
tener que destapar la caja del equipo para instalarlas. Son estas razones, además de la

41
facilidad en el manejo del puerto paralelo, la que nos motiva a trabajar apoyados en
este.
En general el puerto paralelo de cualquier computador personal puede trabajar
en varios modos dependiendo de aspectos como si se trata de entrada y salida de
datos, si se requieren el uso de la memoria del puerto, etc. El modo mas empleado,
que además lo poseen todos los computadores sin importar que tan viejo sea es el
modo estándar o spp (standard parallel port).
El modo spp esta diseñado empleando un enfoque en el que el computador
envía datos a través del puerto hacia una impresora y recibe únicamente algunas
señales de control, por lo que el puerto se maneja empleando tres registros: el de
datos, que funciona como salida de datos; el registro de control, que posee función
mixta de entrada y salida; y el de estado que funciona como entrada.
Como ya se menciono, en modo SPP, estos pines están agrupados en tres
registros y se encuentran mapeados como tal en el computador. La ubicación de estos
registros varia de acuerdo a tres direcciones base usadas para direccionarlos como se
indica en la siguiente tabla.
Puesto que ni el registro de estado ni el de control poseen por si mismos 8 bits
libres para la entrada de datos es necesario realizar un arreglo empleando 5 bits de un
registro y 3 del otro. En la siguiente tabla se indica como es la distribución de pines

42
que se empleara en el puerto para recibir el dato resultante de la conversión análogo-
digital.
Esto supone que del bit 2-8 (el de menor peso en la salida del ADC) al 2-6 se
reciben por el registro de control, mientras que los restantes 5 bits se reciben por el
registro de estado. Es de tener en cuenta que, como se indica en los datos de la figura ,
se tienen algunos bits invertidos dentro de los registros empleados, por lo que es
necesario invertirlos. Por la facilidad de manejo se determino realizar la adecuación
de los datos, esto es generar mascaras para aislar los bits que nos interesan de cada
registro e invertir los que sea necesario por software, asunto que se explica en la
siguiente sección.
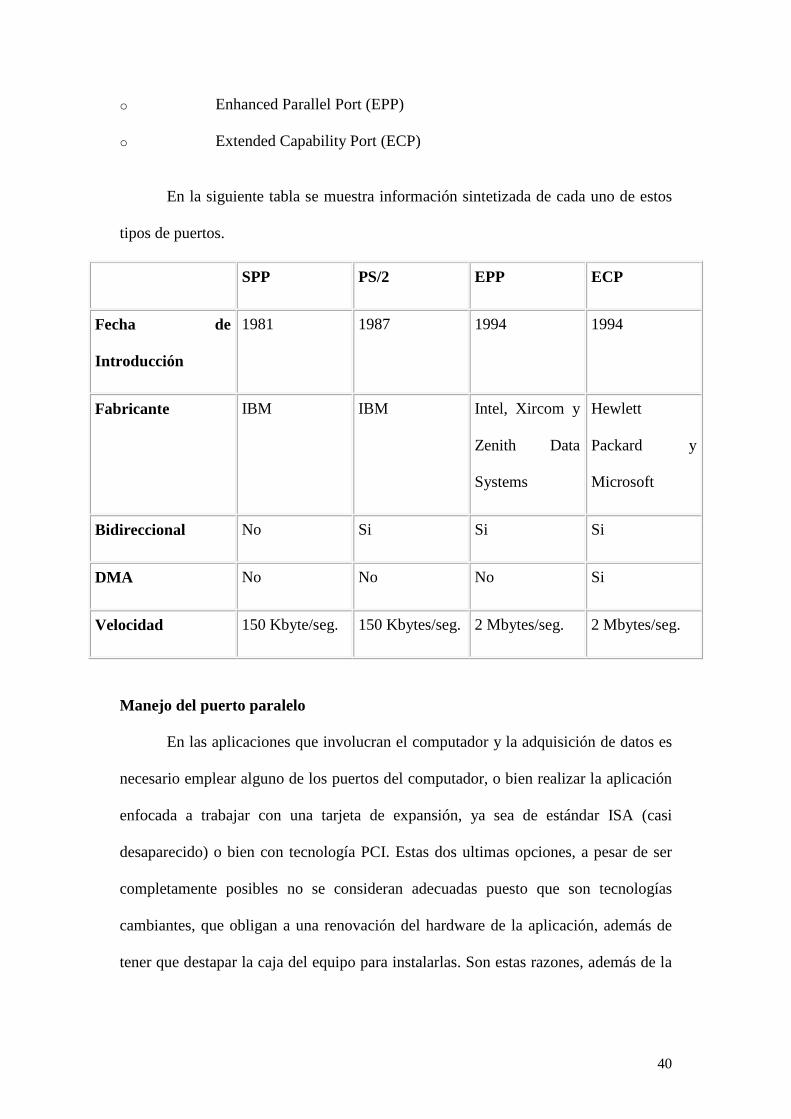
2.1 EL PUERTO DE SALIDA DE 8 BITS 378.- La figura 2.1siguiente
muestra como los registros están conectadas a los pines del conector.
Bit 7 Bit 6 Bit 5 Bit 4 Bit3 Bit 2 Bit 1 Bit 0
PINES 9 8 7 6 5 4 3 2
Figura 2.1 registros de 8 bits para salida.
Estos pines deberán ser capaces de “ source/sink” 2,6/24 mA. Una institución
de OUT escribe directamente en los pines del conector. Al escribir 1 en un bit, resulta
43
un nivel TTL alto en la salida. Este registro también puede ser leído con una
instrucción IN, lo que permite verificar si los datos están siendo correctamente
transferidos. Notar que esto no funciona como entrada, ya que lee la salida del 373.
Figura 2.2 Esquema de los registros de salida.
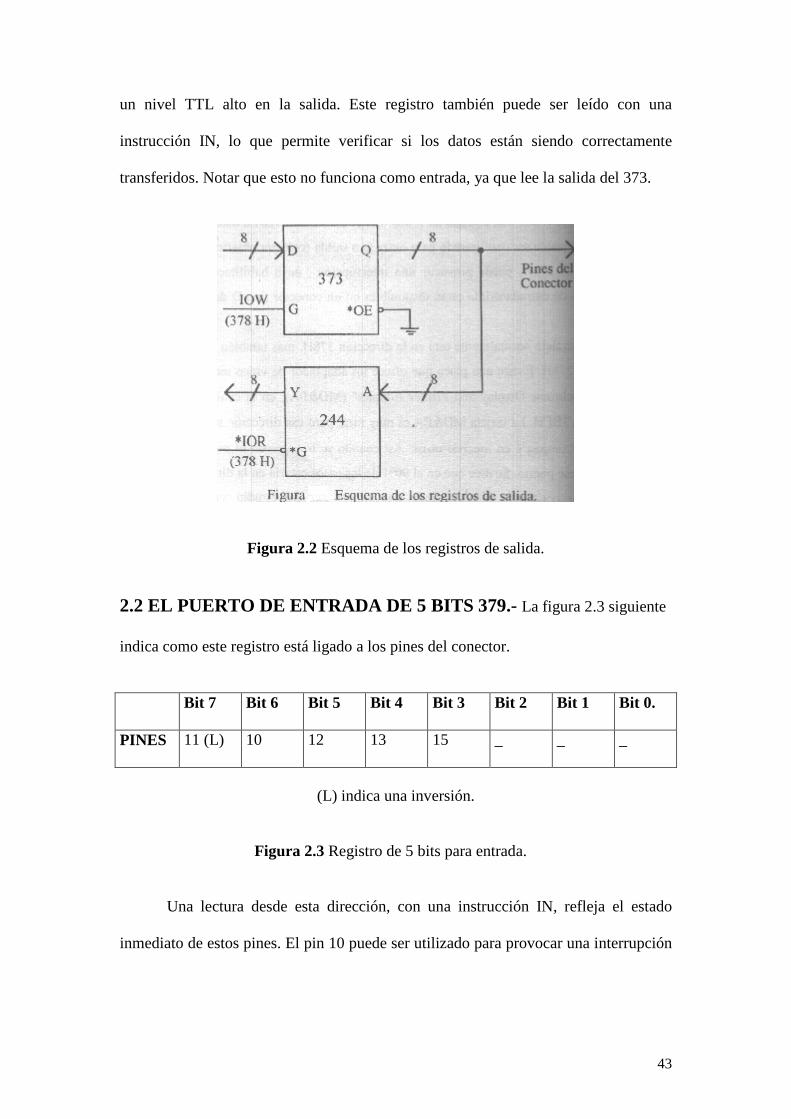
2.2 EL PUERTO DE ENTRADA DE 5 BITS 379.- La figura 2.3 siguiente
indica como este registro está ligado a los pines del conector.
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0.
PINES 11 (L) 10 12 13 15 _ _ _
(L) indica una inversión.
Figura 2.3 Registro de 5 bits para entrada.
Una lectura desde esta dirección, con una instrucción IN, refleja el estado
inmediato de estos pines. El pin 10 puede ser utilizado para provocar una interrupción

44
(IRQ7), con una transición de bajo para alto (↑). Es necesario que el bit 4 del registro
37AH esté en 1.
2.3 EL PUERTO BIDIRECCIONAL DE 4 BITS 37A.- La figura 2.4
siguiente indica como este registro está ligado a los pines del conector.
Bit 7 Bit 6 Bit 5 Bit 4 Bit 3 Bit 2 Bit 1 Bit 0
PINES _ _ _ Hab IRQ7 17(L) 16(H) 14(L) 1(L)
RESET _ _ _ 0 1 0 1 1
Figura 2.4 (L) indica que el pin es invertido.
Registro de 4 bits bidireccional.
El bit es utilizado para controlar la habitación de IRQ 7. Cuando este bit es
colocado en 1, la interrupción puede ocurrir. Estas salidas son accionadas por colector
abierto. Esto les permite trabajar tanto como entrada como salida. Ellas están
conectadas a Vcc por resistores de 4,7 K (pull-up); pueden recibir hasta 7 mA y
todavía mantener un nivel bajo de 0.8 V.
Para funcionar como salida, se debe usar la instrucción OUT, para escribir en
los pines. Para ser usada como entrada, es necesario antes programar todas las salidas
en 1, esto va a permitir que elementos externos tengan para 0, cada una de las
entradas. Al configurarse ese puerto para entrada, o sea, al escribir 1 en todos los
pines, debe tomarse en cuenta que algunos pines están invertidos.
Cuando trabajan como salida, ese puerto (como cualquier salida a colector
abierto) presenta una demora en las transiciones de bajo para alto, pues toda la carga
45
es hecha por el “pull up” pasivo de 4,7 K Ω. Es mas conveniente usar ese puerto
como entrada.
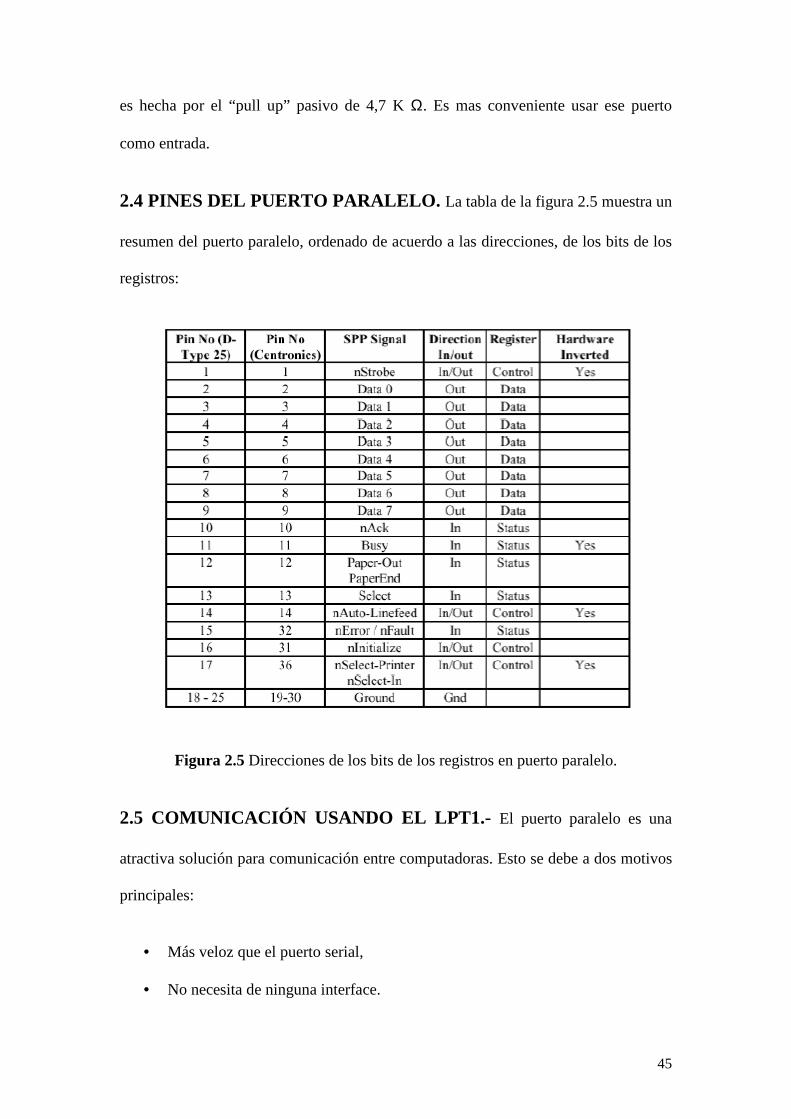
2.4 PINES DEL PUERTO PARALELO. La tabla de la figura 2.5 muestra un
resumen del puerto paralelo, ordenado de acuerdo a las direcciones, de los bits de los
registros:
Figura 2.5 Direcciones de los bits de los registros en puerto paralelo.
2.5 COMUNICACIÓN USANDO EL LPT1.- El puerto paralelo es una
atractiva solución para comunicación entre computadoras. Esto se debe a dos motivos
principales:
• Más veloz que el puerto serial,
• No necesita de ninguna interface.

46
Al lado de estas ventajas, algunos problemas existen:
• Confección del cable,
• Necesidad de un programa dedicado.
En este ítem se hace el estudio del problema y la presentación de una posible
solución. Lo que se espera de una conexión entre dos computadores es que cada una
de ellas pueda recibir o transmitir, inclusive simultáneamente, o sea, se busca una
conexión “full duplex”. Por este motivo el cable paralelo debe tener dos vías de datos:
una para recibir y otra para transmitir.
Para el envío de los datos, se necesita de dos líneas de “ handshake”: STROBE
y ACKNOWLEDGE. Usando STROBE, el transmisor avisa al receptor de que hay un
nuevo dato en la vía de datos. Usando ACNOWLEDGE, el receptor avisa al
transmisor de que ya leyó el dato que está en la vía de datos.
Figura 2.6 Primera solución para conexión entre dos computadoras.

47
2.6 PROTOCOLOS DE ENLACE DEL LPT1.- Para realizar la
transmisión y recepción de los datos, la solución mas sencilla es utilizar un protocolo
semejado al de la impresora. El transmisor coloca la información en la vía de datos y
pulsa la línea de STROBE para alertar al receptor; este al percibir un pulso de
STROBE , lee los datos y pulsa la línea de ACKNOWLEDGE, indicando que la vía
de datos está libre. Esto significa que cada computadora debe detectar dos pulsos:
ACK_IN y STRB_IN. La única forma de detectar pulsos con seguridad es utilizando
interrupción habilitada por flanco. En la PC hay apenas una interrupción destinada al
puerto paralelo (IRQ7) y que ya está destinada a la línea STROBE. O sea, no hay
como detectar con seguridad el pulso de ACKNOWLEDGE. Por eso se adopta un
protocolo basado en niveles.
Figura 2.7 Utilización de STROBE y ACKNOWLEDGE trabajando por nivel

48
Para transmitir un byte, en este canal full duplex, se utiliza un protocolo de 4
fases. A continuación hay una descripción detallada de estas 4 fases, abordando en
separado la transmisión y la recepción. Como el nivel de activación de las líneas es
totalmente irrelevante, se utilizó la activación en nivel alto. En esta descripción T
significa señal activada y F señal desactivada.
TRANSMISIÓN :
FASE 0: si BUSY=F, entonces escribir el LSN, STRB=T, fase=1;
FASE 1: si ACK=T, entonces STRB=F, fase=2;
FASE 3: si ACK=T, entonces STRB=F, fase=0;
RECEPCIÓN:
FASE 0: si STRB=T, entonces leer el LSN, ACK=T, BUSY=T, fase1;
FASE 1: si STRB=F, entonces ACK=F, BUSY=F, fase2;
FASE 3: si STRB=F, entonces ACK=F, BUSY=F, fase 0;
En los algoritmos de transmisión y recepción notase que hay una gran
semejanza entre las fases 0,2 y 1,3. En este ejemplo la señal de BUSY no tiene
función y solamente refleja la señal de ACKNOWLEDGE pero, esta línea puede ser
usada para permitir protocolos de comunicación de mayor complejidad.
2.7 APLICACIONES.
Veamos cómo controlar el puerto a través de Visual Basic (cualquier versión
de 32 bits). Para ello, necesitaremos tener en nuestro directorio de sistema

49
("C\windows\system") una librería especial llamada INPOUT32.DLL. Además de la
mencionada librería se incluye un módulo (denominado "inpout32.bas") con las
correspondientes llamadas a la DLL. Una vez descargada la librería basta agregar el
módulo al proyecto para disponer entonces de la instrucción out, similar a BASIC.
En este momento estamos en condiciones de desarrollar un primer circuito
básico de prueba. Éste va a consistir en prender o apagar 8 Leds conectado cada uno a
los pines D0 a D7. El diagrama esquemático es el siguiente:
En donde J1 es la ficha DB-25 del puerto paralelo, R1 a R8 son resistencias de
1/8W de 330 ohms. D1 a D8 son leds. Finalmente IC1 es un SN74AC541 o similar.
50
Una vez montado, este circuito será de gran utilidad para probar cualquier
programa que utilice el puerto paralelo. Las distintas aplicaciones de éste son
inmensas.
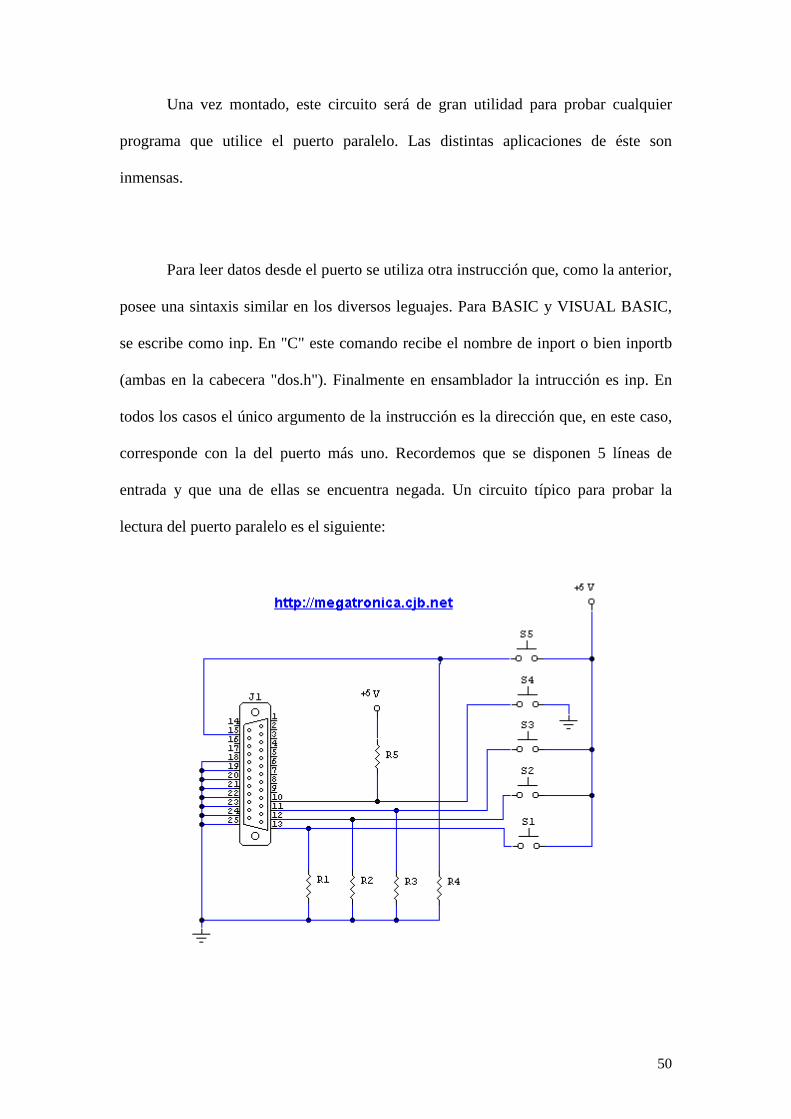
Para leer datos desde el puerto se utiliza otra instrucción que, como la anterior,
posee una sintaxis similar en los diversos leguajes. Para BASIC y VISUAL BASIC,
se escribe como inp. En "C" este comando recibe el nombre de inport o bien inportb
(ambas en la cabecera "dos.h"). Finalmente en ensamblador la intrucción es inp. En
todos los casos el único argumento de la instrucción es la dirección que, en este caso,
corresponde con la del puerto más uno. Recordemos que se disponen 5 líneas de
entrada y que una de ellas se encuentra negada. Un circuito típico para probar la
lectura del puerto paralelo es el siguiente:

51
Nuevamente J1 es la ficha DB-25. R1 A R5 son resistencias de 1/8 W 10
kiloohms. S1 a S5 son pulsadores o llaves. Nótese que el circuito tiene en cuenta la
línea negada, lo que "normaliza” la lectura.
Tomando como referencia a estos circuitos se puede diseñar y construir un sin
número de circuitos y aplicaciones utilizando el puerto paralelo y cualquier lenguaje
de programación.
Algunas aplicaciones son: Control de motores paso a paso, sistemas de alarma,
generador de señales digital, fuente digital, efectos de luces, efectos sonoros,... y
muchos más.
2.8 DIAGRAMA DE BLOQUES DE UNA LÍNEA DE DATOS POR
EL PUERTO PARALELO.
El puerto paralelo está formado por 17 líneas de señales y 8 líneas de tierra.
Las líneas de señales están formadas por tres grupos:
o 4 Líneas de control
o 5 Líneas de estado
o 8 Líneas de datos
En el diseño original las líneas de control son usadas para la interface, control
e intercambio de mensajes desde el PC a la impresora.
Las líneas de estado son usadas para intercambio de mensajes, indicadores de
estado desde la impresora al PC (falta papel, impresora ocupada, error en la
impresora).

52
Las líneas de datos suministran los datos de impresión del PC hacia la
impresora y solamente en esa dirección. Las nuevas implementaciones del puerto
permiten una comunicación bidireccional mediante estas líneas.
Cada una de estas líneas (control, estado, datos) puede ser referenciada de
modo independiente mediante un registro.
Los registros del puerto paralelo
Cada registro del puerto paralelo es accesado mediante una dirección. El
puerto paralelo tiene tres registros:
o Registro de datos
o Registro de estado
o Registro de control
En la tabla que se muestra a continuación se muestra la relación que existe
entre las líneas físicas del conector del PC y los registros.
Tabla general del puerto paralelo
DB25 Señal Registro Tipo Activo Sentido
1 Control 0 C0- Salida Bajo Invertido
2 Dato 0 D0 Salida Alto Directo
3 Dato 1 D1 Salida Alto Directo
4 Dato 2 D2 Salida Alto Directo
5 Dato 3 D3 Salida Alto Directo
6 Dato 4 D4 Salida Alto Directo

53
7 Dato 5 D5 Salida Alto Directo
8 Dato 6 D6 Salida Alto Directo
9 Dato 7 D7 Salida Alto Directo
10 Estado 6 S6+ Entrada Alto Directo
11 Estado 7 S7- Entrada Bajo Invertido
12 Estado 5 S5+ Entrada Alto Directo
13 Estado 4 S4+ Entrada Alto Directo
14 Control 1 C1- Salida Bajo Invertido
15 Estado 3 S3+ Entrada Alto Directo
16 Control 2 C2+ Salida Alto Directo
17 Control 3 C3- Salida Bajo Invertido
18-25 Tierra
Notas:
Un dato en alto es un 1, un dato en bajo es un 0
La entrada y salida son desde el punto de vista del PC
Esquema
El puerto paralelo esquemáticamente, se describe a continuación. Nótese la
conexión al bus ISA en la parte izquierda y los registros en la parte derecha.

54
Figura 2.8 Esquema de un puerto paralelo.
Descripción de los componentes
El puerto paralelo originalmente estaba formado por los siguientes
componentes:
o 1 Latch para manejar el registro de datos
o 1 Buffer para controlar la retroalimentación del registro de datos
o 1 Buffer para manejar el registro de estado
55
o 1 Latch para manejar el registro de control
o 1 Buffer para controlar la retroalimentación del registro de control
o 1 Multiplexor para direccionar los puertos en el bus ISA
o 1 Driver bidireccional para conectar con el bus ISA
Explicación del funcionamiento mediante el BIOS y el MS-DOS
IBM especificó direcciones base para el puerto paralelo estándar (dentro del
espacio de direccionamiento de Entrada/Salida del 80x86). El adaptador de impresora
podría usar la dirección base 3BCh, o más tarde 378h o 278h.
El BIOS (Basic Input Output System) de IBM crea en el momento de arranque o
POST (Power On Seft Test) una tabla en el espacio de la memoria principal (RAM)
para 4 direcciones base de puerto paralelo de impresora, estos se almacenan como 4
bytes empezando con la dirección de memoria 408h. Durante el arranque, el BIOS
comprueba si hay puertos paralelos en las direcciones base 3BCh, 378h, y 278h, en
ese orden, y almacena la dirección base de cualesquiera que hayan sido encontrados
en posiciones consecutivas de la tabla. Las posiciones que no son usadas pueden estar
en 0, o como algunos BIOS lo hacen, le colocan la dirección del primer puerto
encontrado.
Algunos programas pueden ignorar esta tabla, pero esta es usada por lo menos
por el propio BIOS (mediante la INT 17 de E/S de impresora) y por el MS-DOS.
El BIOS detecta estos puertos escribiendo AAh al registro de datos (en la dirección de
E/S Base + 0), y luego si en el registro de datos se lee AAh. Significa que hay un
puerto.
Normalmente la asignación de direcciones es como sigue:
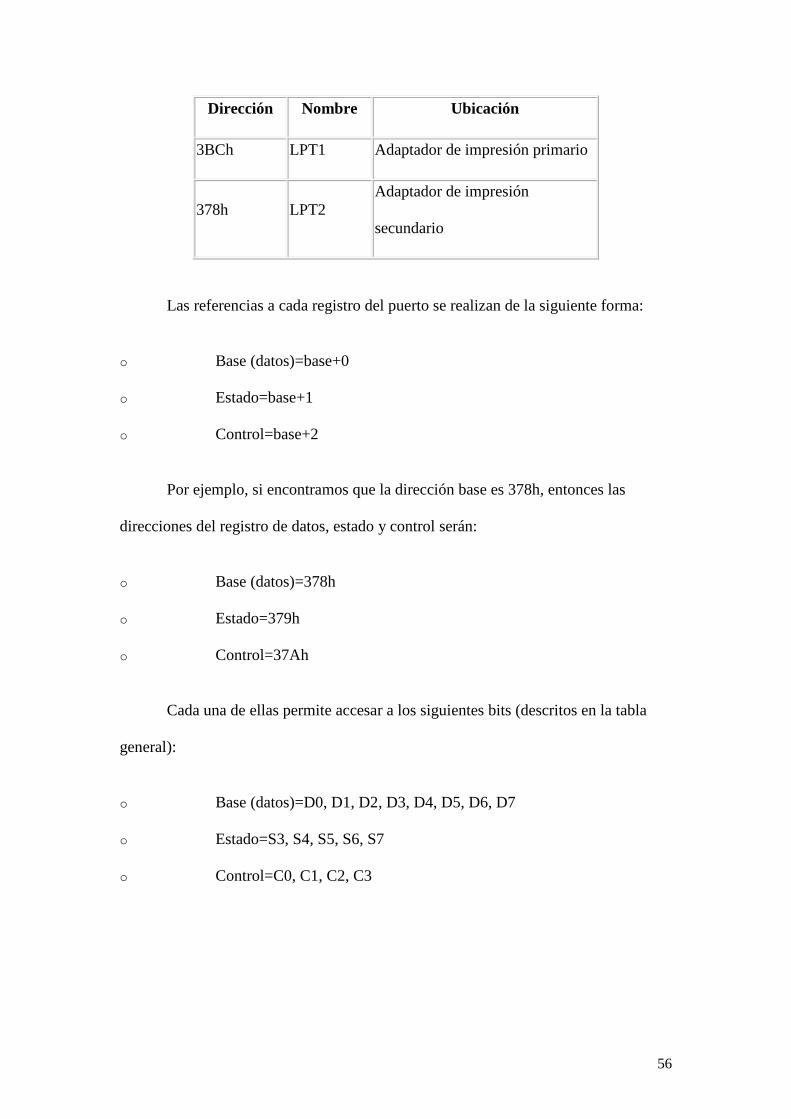
56
Dirección Nombre Ubicación
3BCh LPT1 Adaptador de impresión primario
378h LPT2 Adaptador de impresión
secundario
Las referencias a cada registro del puerto se realizan de la siguiente forma:
o Base (datos)=base+0
o Estado=base+1
o Control=base+2
Por ejemplo, si encontramos que la dirección base es 378h, entonces las
direcciones del registro de datos, estado y control serán:
o Base (datos)=378h
o Estado=379h
o Control=37Ah
Cada una de ellas permite accesar a los siguientes bits (descritos en la tabla
general):
o Base (datos)=D0, D1, D2, D3, D4, D5, D6, D7
o Estado=S3, S4, S5, S6, S7
o Control=C0, C1, C2, C3

57
CAPITITULO III
DIGITALIZACIÓN DE SEÑALES ANALÓGICAS
EXTERNAS.
Para ello se describe el software de adquisición de datos.
SISTEMA DE ADQUISICIÓN DE DATOS A TRAVES DEL
PUERTO PARALELO Y PLATAFORMA LABVIEW
Resumen: En el campo de la automatización electrónica y la instrumentación
moderna es usual el empleo de soluciones apoyadas en ordenadores. A continuación
se presenta una aplicación en la cual se realiza, de una manera sencilla y eficiente, un
muestreo y digitalización de datos análogos empleando conversor análogo a digital, el
puerto paralelo del PC y plataforma Labview.
Palabras clave: Interfaces, adquisición de datos, digitalización, conversor análogo a
digital ADC, puerto paralelo, Labview, muestreo.
1. Introducción
En gran cantidad de aplicaciones, tanto a nivel académico, como a nivel
industrial, es necesario registrar el valor de diferentes variables físicas que
evolucionan en función del tiempo, para su posterior análisis y/o control.
En muchos casos, estas mediciones se realizan mediante medidores análogos,
registrando de forma manual sus valores con respecto al tiempo. Sin duda, solo en
58
algunas pocas (muy pocas) aplicaciones, el procedimiento del operario con un reloj
satisface los requerimientos de precisión tanto en tiempo, como en el valor de la
variable registrada.
Es claro que en la gran mayoría de aplicaciones, es deseable tener un grado de
precisión suficientemente alto,tanto en el tiempo entre muestra y muestra, así como en
el valor registrado.
El objetivo de la presente aplicación es tener una herramienta para la
adquisición de datos, que permita realizar un muestreo de un voltaje variable en el
tiempo a intervalos de tiempo iguales y con la mayor precisión posible
2. Planteamiento del problema
En general el sistema se divide en tres bloques principales: sistema de conversión de
datos análogos a datos digitales, sistema de interfaz a través del puerto paralelo, y
sistema de control, visualización y registro de los datos en el computador.
Este planteamiento esta enfocado a una arquitectura por niveles que permitan
el cambio de tecnología en cualquiera de los niveles, todo pensando en desarrollos
posteriores.
Cada nivel tendrá funciones especificas dependiendo de las características de
cada subsistema.
3. Diseño del sistema
59
Como ya se mostró, el sistema esta compuesto de tres partes básicas:
a) conversión de datos análogos a datos digitales.
b) Interfaz a través del puerto paralelo.
c) Control, visualización y registro de los datos en el computador.
A continuación se explica los requerimientos de cada parte y la solución
propuesta en este desarrollo.
La mayoría de los transductores generan una señal de salida analógica. Por
ejemplo un transductor de temperatura; si la temperatura varia de manera continua, la
salida del transductor mostrara una variación continua y hay posiblemente una
infinidad de números posibles para los valores de salida. El convertidor
Analógico/Digital (convertidor A/D o ADC) es el dispositivo electrónico utilizado en
los sistemas de adquisición de datos para convertir las señales analógicas de los
transductores en el código digital utilizado por la computadora.
La representación digital del valor de salida del transductor es un código
relacionado con la salida analógica del transductor, pero no describe exactamente la
salida.
Por ejemplo, podría conectarse la salida de un transductor a un relevador que
opera un foco; si el voltaje es menor o igual a 5volts el foco esta apagado, si el voltaje
de salida del transductor es mayor a 5volts el foco se enciende. Los estados de
prendido y apagado del foco son un código digital que representa la salida del
transductor.

60
De manera similar la salida del transductor se podría representar por dos focos,
por lo que existirían cuatro estados posibles para el par de focos:
Foco 1 Foco 2
V<2.5 Apagado Apagado
2.5≤V<5.0 Apagado Encendido
5.0≤V<7.5 Encendido Apagado
7.5≤V Encendido Encendido
Con dos focos la salida del transductor ahora se representa con mas precisión,
en forma digital, que con un foco. Estos sistemas de focos representan formas
primitivas de convertidores A/D. El sistema de un foco es un convertidor A/D de 1-bit
y el sistema de dos focos es un convertidor A/D de 2-bits. Un bit tiene dos estados
posibles encendido o apagado. Dentro de la computadora, se usan los flip-flops para
representar tales estados.
En general, la salida de un convertidor A/D tiene 2N valores posibles, donde N
es el número de bits usado para representar la salida digital. El sistema de 1-bit tiene
dos estados de salida posibles, 0 y 1, y el sistema de 2-bits tiene 22 = 4 estados de
salida posibles(00,01,10 y 11 en representación binaria). Los Sistemas de adquisición
de datos computarizados normalmente utilizan convertidores A/D con 8-bits, de
menos, donde el número de estados posibles es 28(igual a 256), estos estados se
representan por números binarios con valores entre 00000000 y 11111111. Un
ejemplo es 10000001,dado que existe una conversión directa entre números

61
binarios(base 2) y decimales(base 10), esta salida se establece como 129 en decimal.
La representación física actual en la salida del ADC es, sin embargo, binaria.
Aunque la circuiteria de los ADC´s puede variar ampliamente, desde un punto
de vista externo estos pueden ser descritos por tres características principales. La
primera es el número de bits usado para representar la salida, entre más grande sea el
número de bits mas grande será el número de estados posibles para la salida y la
entrada analógica será representada con mayor precisión por la salida digital. La
segunda característica es el rango de entrada; y la tercera es la velocidad de
conversión, el tiempo que toma crear una salida digital después de que al dispositivo
se le indica hacer la conversión.
El rango de entrada de un ADC es el rango de voltaje analógico de entrada
sobre del cual el convertidor producirá una representación digital de salida. Los
voltajes de entrada fuera de rango no producirán una representación digital
significativa de la entrada. El rango de entrada de los ADC´s se clasifica como
unipolar o bipolar. Un convertidor unipolar solo puede responder a entradas
analógicas con el mismo signo (ejem. 0 a 5 volts o 0 a -10 volts), y uno bipolar puede
convertir entradas positivas y negativas (valores típicos son ±5 y ±10 volts).
3.1 CONSIDERACIONES DEL HARDWARE. Se encuentran.
1.- PARÁMETROS ANÁLOGOS DE I/O.- Para configurar apropiadamente una
tarjeta DAQ con entradas y salidas análogas, debe primero entenderse los efectos que;
resolución, rango y ganancia tienen en la calidad de la señal digitalizada.
Dependiendo del tipo de tarjeta que se va a utilizar, se puede configurar los
parámetros mediante jumpers o software.
62
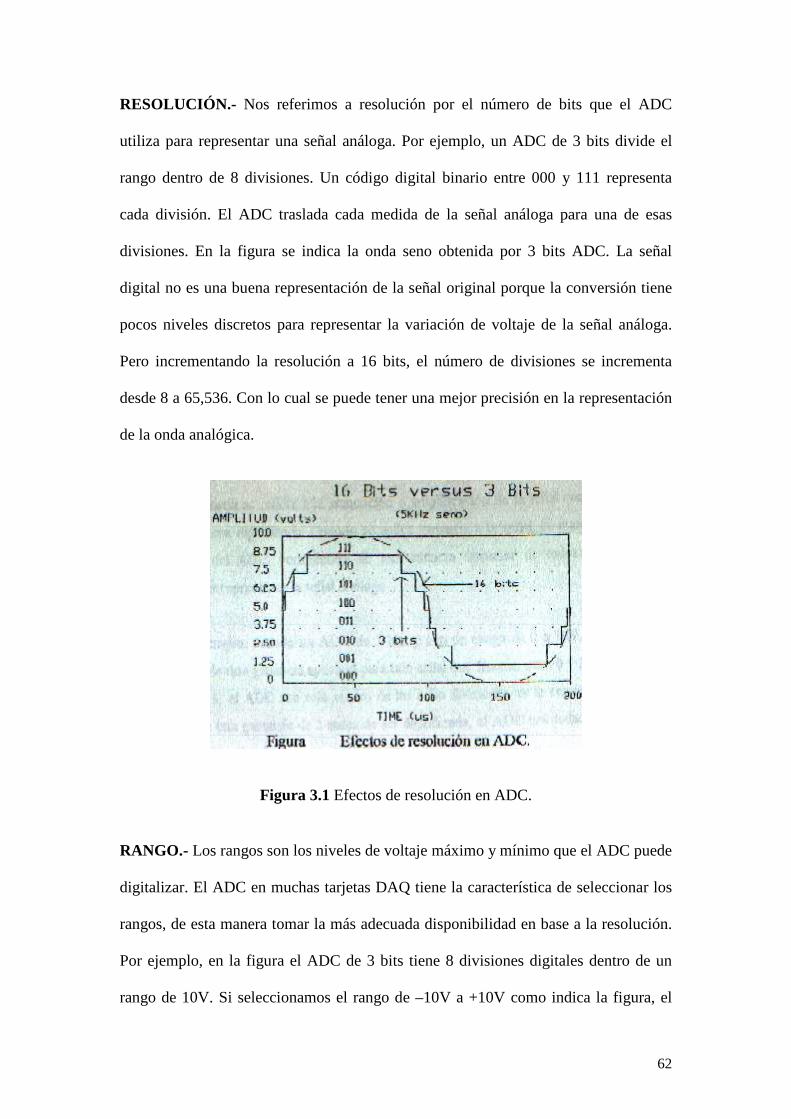
RESOLUCIÓN.- Nos referimos a resolución por el número de bits que el ADC
utiliza para representar una señal análoga. Por ejemplo, un ADC de 3 bits divide el
rango dentro de 8 divisiones. Un código digital binario entre 000 y 111 representa
cada división. El ADC traslada cada medida de la señal análoga para una de esas
divisiones. En la figura se indica la onda seno obtenida por 3 bits ADC. La señal
digital no es una buena representación de la señal original porque la conversión tiene
pocos niveles discretos para representar la variación de voltaje de la señal análoga.
Pero incrementando la resolución a 16 bits, el número de divisiones se incrementa
desde 8 a 65,536. Con lo cual se puede tener una mejor precisión en la representación
de la onda analógica.
Figura 3.1 Efectos de resolución en ADC.
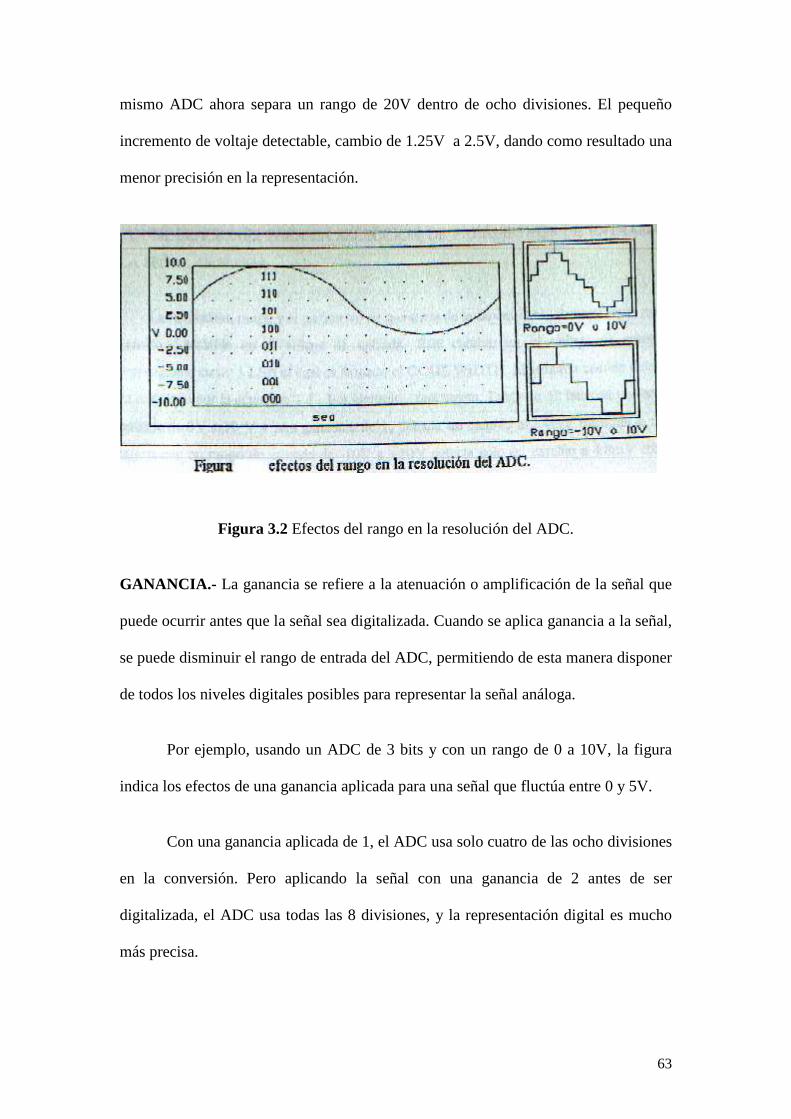
RANGO.- Los rangos son los niveles de voltaje máximo y mínimo que el ADC puede
digitalizar. El ADC en muchas tarjetas DAQ tiene la característica de seleccionar los
rangos, de esta manera tomar la más adecuada disponibilidad en base a la resolución.
Por ejemplo, en la figura el ADC de 3 bits tiene 8 divisiones digitales dentro de un
rango de 10V. Si seleccionamos el rango de –10V a +10V como indica la figura, el
63
mismo ADC ahora separa un rango de 20V dentro de ocho divisiones. El pequeño
incremento de voltaje detectable, cambio de 1.25V a 2.5V, dando como resultado una
menor precisión en la representación.
Figura 3.2 Efectos del rango en la resolución del ADC.
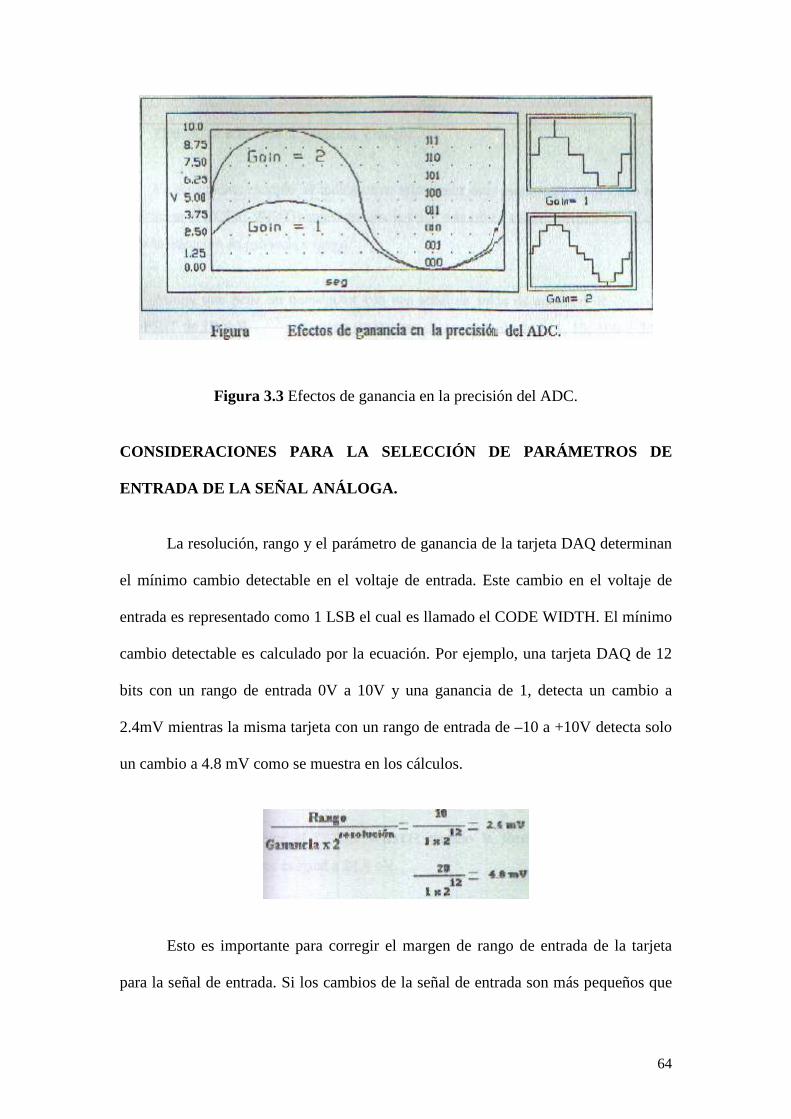
GANANCIA.- La ganancia se refiere a la atenuación o amplificación de la señal que
puede ocurrir antes que la señal sea digitalizada. Cuando se aplica ganancia a la señal,
se puede disminuir el rango de entrada del ADC, permitiendo de esta manera disponer
de todos los niveles digitales posibles para representar la señal análoga.
Por ejemplo, usando un ADC de 3 bits y con un rango de 0 a 10V, la figura
indica los efectos de una ganancia aplicada para una señal que fluctúa entre 0 y 5V.
Con una ganancia aplicada de 1, el ADC usa solo cuatro de las ocho divisiones
en la conversión. Pero aplicando la señal con una ganancia de 2 antes de ser
digitalizada, el ADC usa todas las 8 divisiones, y la representación digital es mucho
más precisa.
64
Figura 3.3 Efectos de ganancia en la precisión del ADC.
CONSIDERACIONES PARA LA SELECCIÓN DE PARÁMETROS DE
ENTRADA DE LA SEÑAL ANÁLOGA.
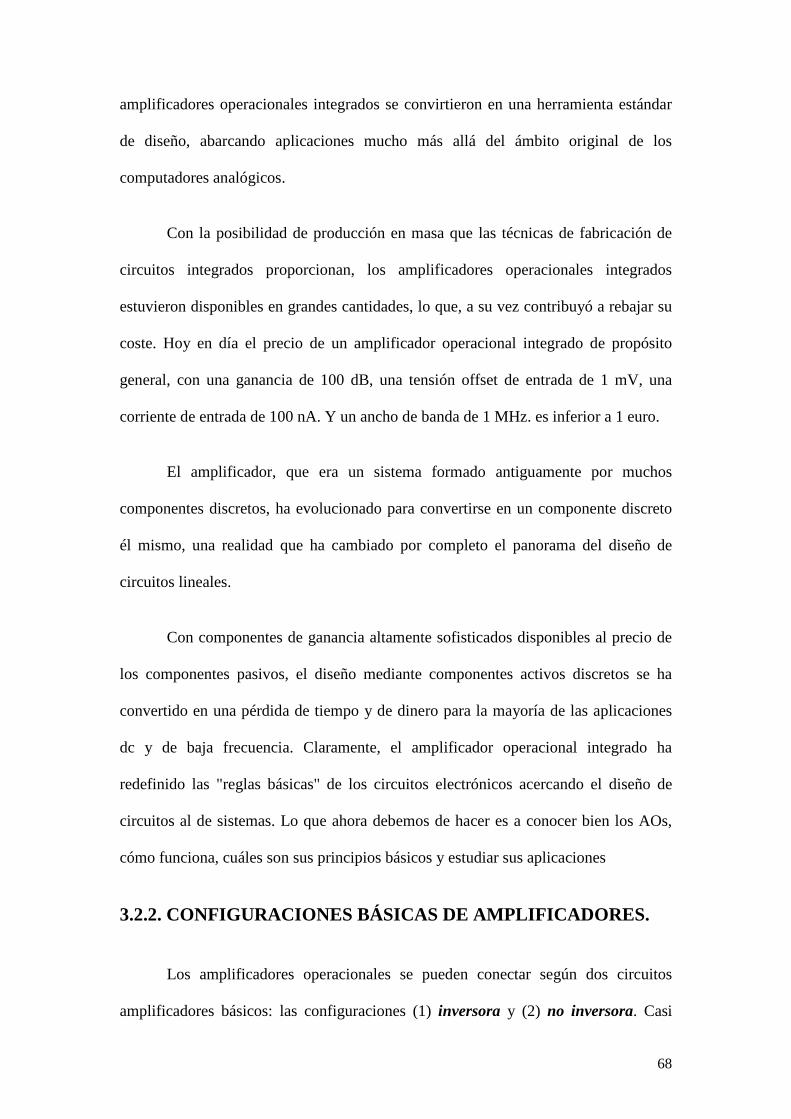
La resolución, rango y el parámetro de ganancia de la tarjeta DAQ determinan
el mínimo cambio detectable en el voltaje de entrada. Este cambio en el voltaje de
entrada es representado como 1 LSB el cual es llamado el CODE WIDTH. El mínimo
cambio detectable es calculado por la ecuación. Por ejemplo, una tarjeta DAQ de 12
bits con un rango de entrada 0V a 10V y una ganancia de 1, detecta un cambio a
2.4mV mientras la misma tarjeta con un rango de entrada de –10 a +10V detecta solo
un cambio a 4.8 mV como se muestra en los cálculos.
Esto es importante para corregir el margen de rango de entrada de la tarjeta
para la señal de entrada. Si los cambios de la señal de entrada son más pequeños que

65
la resolución de la tarjeta, se debería amplificar la señal. Por ejemplo, si es usada una
ganancia de 10 en la tarjeta con un rango de 10V y una resolución de 12 bits la
precisión se incrementa desde 2.4mV a 2.44 uV.
3.1.1. DETALLES DEL COMPUTADOR .- Dependiendo del tipo de tarjeta
que disponga , se tiene que ubicar varios parámetros fijando swich y jumpers en la
tarjeta, antes de instalar la tarjeta en el computador. Otros tipos de tarjetas DAQ como
las PLUG and PLAY (PnP) fijan sus parámetros por medio de software. En este tema
se discutirá varios parámetros de la tarjeta que se configuran en el hardware si la
tarjeta no es PLUG and PLAY.
Tres son los parámetros que se debe ajustar en la tarjeta DAQ, que determinan
como la tarjeta se puede comunicar con el computador. Esos parámetros son la
dirección base I/O, el nivel de interrupción, y el canal de DMA.
1 EL DIRECCIONAMIENTO BASE I/O .- La tarjeta DAQ se comunica con el
computador primeramente a través de registros. El software escribe hacia los registros
de configuración en la tarjeta para configurar la tarjeta. El software lee los datos del
registro en la tarjeta para obtener el estado de la tarjeta o una señal de medida. Los
parámetros de direccionamiento base I/O determinan en que espacio de la memoria
del computador los registros de la tarjeta residen.
2 NIVEL DE INTERRUPCION. – Otra forma de comunicar la tarjeta DAQ con el
computador es a través del proceso de interrupción, las interrupciones son muy
importantes en la operación de los computadores.

66
Ellos dan al procesador la habilidad de responder prontamente a los
periféricos. Se puede pensar en un proceso de interrupción en una campana o un
timbre. Si su puerta no tiene un timbre, debería ir periódicamente a la puerta para ver
si algo a pasado en un tiempo en particular. Esto resulta muy ineficiente. Con un
timbre, solo se necesita ir a la puerta cuando el timbre suena, y estaremos seguros de
que algo esta allí esperando. Una tarjeta DAQ puede usar una interrupción como un
timbre, para procesar la señal indicando que tiene datos esperando para ser leidos. A
cada dispositivo que utiliza un proceso de interrupción se le debe asignar un nivel
diferente de interrupción, caso contrario, si los dispositivos tienen los mismos niveles
de interrupción pueden entrar en conflicto.
3 ACCESO DIRECTO A MEMORIA (DMA).
La tercera manera de comunicar la tarjeta DAQ hacia el computador es a
través del ACCESO DIRECTO A MEMORIA (DMA). El DMA es un método de
transferencia de datos, en el cual los datos son transferidos directamente desde los
periféricos a la memoria del computador, no utilizando para ello el procesador. El
DMA es usualmente requerido para realizar máxima velocidad de transferencia de
datos, esto es muy útil para dispositivos que necesitan enviar datos a altas
velocidades. A cada dispositivo que utiliza DMA debe asignarse un canal separado de
DMA, caso contrario, entraran en conflicto con los dispositivos.
4 CONFIGURACIÓN DE LA TARJETA DAQ.
Dependiendo del computador utilizado, tres son los parámetros que son fijados
en forma diferente.

67
PC/XT/AT Bus. Si su tarjeta DAQ no es PnP , jumpers y dip switches
determinan el direccionamiento base I/O, el nivel de interrupción, y el canal(s) de
DMA. Se debería verificar que el sistema del computador no tenga otro hardware con
esos parámetros. Si se cambia los jumpers, se debe realizar el correspondiente cambio
en el software de configuración.
5 CONFIGURACION DE LAS I/O ANÁLOGAS.
Las tarjetas DAQ tiene varios parámetros de configuración para las I/O
análogas que controlan la operación del ADC Y DAC. Algunas tarjetas usan solo
configuración por software para fijar los parámetros I/O, mientras otras pueden
hacerlo por hardware. Una tarjeta que se puede configurar por software , se configura
utilizando el software de configuración.
3.2 ACONDICIONAMIENTO DE SEÑALES ANALÓGICAS.
Tenemos a continuación.
3.2.1. AMPLIFICADORES ANALÓGICOS PARA LA
INSTRUMENTACIÓN.
Los primeros amplificadores operacionales usaban el componente básico de su
tiempo: la válvula de vacío. El uso generalizado de los AOs no comenzó realmente
hasta los años 60, cuando empezaron a aplicarse las técnicas de estado sólido al
diseño de circuitos amplificadores operacionales, fabricándose módulos que
realizaban la circuitería interna del amplificador operacional mediante diseño discreto
de estado sólido. Entonces, a mediados de los 60, se introdujeron los primeros
amplificadores operacionales de circuito integrado. En unos pocos años los
68
amplificadores operacionales integrados se convirtieron en una herramienta estándar
de diseño, abarcando aplicaciones mucho más allá del ámbito original de los
computadores analógicos.
Con la posibilidad de producción en masa que las técnicas de fabricación de
circuitos integrados proporcionan, los amplificadores operacionales integrados
estuvieron disponibles en grandes cantidades, lo que, a su vez contribuyó a rebajar su
coste. Hoy en día el precio de un amplificador operacional integrado de propósito
general, con una ganancia de 100 dB, una tensión offset de entrada de 1 mV, una
corriente de entrada de 100 nA. Y un ancho de banda de 1 MHz. es inferior a 1 euro.
El amplificador, que era un sistema formado antiguamente por muchos
componentes discretos, ha evolucionado para convertirse en un componente discreto
él mismo, una realidad que ha cambiado por completo el panorama del diseño de
circuitos lineales.
Con componentes de ganancia altamente sofisticados disponibles al precio de
los componentes pasivos, el diseño mediante componentes activos discretos se ha
convertido en una pérdida de tiempo y de dinero para la mayoría de las aplicaciones
dc y de baja frecuencia. Claramente, el amplificador operacional integrado ha
redefinido las "reglas básicas" de los circuitos electrónicos acercando el diseño de
circuitos al de sistemas. Lo que ahora debemos de hacer es a conocer bien los AOs,
cómo funciona, cuáles son sus principios básicos y estudiar sus aplicaciones
3.2.2. CONFIGURACIONES BÁSICAS DE AMPLIFICADORES.
Los amplificadores operacionales se pueden conectar según dos circuitos
amplificadores básicos: las configuraciones (1) inversora y (2) no inversora. Casi
69
todos los demás circuitos con amplificadores operacionales están basados, de alguna
forma, en estas dos configuraciones básicas. Además, existen variaciones
estrechamente relacionadas de estos dos circuitos, más otro circuito básico que es una
combinación de los dos primeros: el amplificador diferencial.
3.3 ACONDICIONAMIENTO DE SEÑALES DIGITALES. Se hallan.
3.3.1. CONVERSORES DAC (DE DIGITAL A ANALÓGICO).
¿En que consiste un convertidor Digital/Analógico?
R. Un convertidor D/A. Es un dispositivo Electrónico que convierte una señal digital
en una señal analógica.
Un convertidor D/A esta provisto de un arreglo de resistencias (R-2R), las cuales
están conectadas a un amplificador sumador de tal manera que la resolución depende
del numero de entradas digitales.
¿Cuántos pines tiene el DAC?
R. Este DAC tiene 20 pines; 8 para entrada de datos, 5 que funcionan como entradas
de control, una entrada del voltaje de referencia, uno para la alimentación, 2 para
conectarse a tierra, y además tiene tres pines los cuales van conectados a un
amplificador operacional para convertir la corriente en voltaje de salida.
¿Por qué se requirió utilizar un Amplificador Operacional en esta práctica?
R. Para convertir la corriente de salida en voltaje.
¿Qué se observó en el osciloscopio? ¿y por qué?

70
R. En el osciloscopio se observó la salida del convertidor digital analógico en una
forma escalonada este efecto observado es provocado porque el convertidor retiene el
dato actual hasta que le llega otro dato nuevo, es decir, en este caso el DAC entrega a
la salida lo que le entrega el convertidor analógico digital, pero como el convertidor
analógico digital genera un tiempo de retardo, entonces el DAC tiene que retener el
dato hasta que el ADC proporciona un dato nuevo. Esta operación de retardo es
realizada por medio de unos registros internos del DAC.
¿Qué resolución tiene este convertidor?
R. La resolución esta directamente relacionada con el número de entradas digitales o
bits en el DAC. Por ejemplo este DAC utilizado tiene 256 pasos y por lo tanto tiene
una resolución de 8 bits.
Descripción general del DAC:
R. Este DAC esta hecho de Silicio y Cromo tiene una resolución de 8 bits, este
dispositivo puede ser conectado directamente con el 8080, 8048, 8055, Z80 y otros
populares microprocesadores.
El DAC utilizado contiene buffer doble los cuales permiten una salida de voltaje
mientras se introduce la próxima palabra digital.
3.3.2 CONVERSIÓN DE DATOS ANÁLOGOS A DIGITAL.
Los requerimientos de este subsistema se acotan en dos aspectos básicos:
tiempo de muestreo, y regulación del tiempo entre muestra y muestra.

71
Como se desea un desarrollo de bajo costo y fácil implementación, se emplea
un conversor análogo-digital comercial de la firma national semiconductor, el ADC
0808.
El circuito integrado ADC 0808 es un componente electrónico de tecnología
CMOS con un conversor analógico a digital de 8 bits, un multiplexor análogo de ocho
entradas y control lógico compatible con el funcionamiento de un microprocesador,
característica que permite conectarlo directamente a un bus de expansión del
computador. El conversor analógico digital de 8 bits emplea la técnica de
aproximaciones sucesivas para realizar la conversión.
El diseño del ADC 0808 ofrece alta velocidad frente a su costo, gran
desempeño, mínima dependencia de la temperatura, y mínimo consumo de potencia.
La figura 3.4. se muestra un diagrama de ubicación de los pines.
Diagrama de la distribución de pines del ADC 0808
3.3.2.1 ADC DE RAMPA DIGITAL.- Tenemos.
Circuitos Convertidores A/D
ADC de rampa digital
72
Una de las versiones mas sencillas de ADC es la que emplea un contador
binario como registro y permite que el reloj incremente el estado del contador un paso
a la vez hasta que V AX >= VA . Este tipo de convertidor recibe el nombre de ADC de
rampa digital debido a que la forma de onda de VAX es una rampa (en realidad un
escalera).
La figura 3.5 es el diagrama de un ADC de rampa digital . Como se observa,
este contiene un contador, un DAC, un comparador analógico y una compuerta AND
de control.
La salida del comparador también proporciona la señal de fin de conversión.
Se supone que Voltaje de referencia es mayor la operación del mismo es la siguiente
Se aplico el pulso de Convertir para poner el contador en cero esto permito el
paso de los pulsos del reloj por la compuerta AND. Cuando las entradas del DAC son
todas cero, la salida de este es Voltaje analógico = 0. Dado que Voltaje de referencia
> Voltaje analógico la salida es cero. A medida que cambia el contador, la salida del
DAC, aumenta un paso a la vez, este proceso continua hasta que Voltaje analógico
alcanza un paso que excede a Voltaje de referencia por una cantidad igual o mayor
que Vt (por lo general de 10 a 100uV). En este momento la salida del comparador
cambia de estado y no permite el flujo de pulsos hacia el contador, por el cual este
deja de contar.
El contenido del contador es la representación digital del Voltaje de
Referencia.

73
Figura 3.5 Diagrama del convertidor A/D de rampa digital.
DESARROLLO Simulación e Implementación
Una vez establecida la teoría el paso siguiente es la simulación de un circuito como
el mostrado en la figura . Con esto nos damos cuenta si el circuito próximo a
implementar cumplirá con las características que buscamos.
El circuito simulado se muestra en la figura , en la cual se puede apreciar que
consta con todos los elementos presentados en el diagrama es decir DAC, contador y
comparador.

74
3.3.2.3 EL ADC 0808.- Analógico digital de 8 bits.
Manejo del conversor analógico digital ADC 0808.
En la figura se muestra el diagrama del circuito de conversión análogo a digital, la
señal de clock (reloj) es generada mediante un circuito integrado LM555, el cual se
configura como oscilador con una frecuencia aproximada a los 180 KHz. Si se desea,
este oscilador puede ser reemplazado por uno de mayor frecuencia, pues el ADC 0808
puede tolerar frecuencias de reloj de hasta 400KHz.
Figura 3.6 Diagrama de conexión del adc 0808 en la configuración empleada.
Las señales de start (inicio) y ALE (habilitación de canal) se emplean ligadas
como un solo pin de control que selecciona el canal del conversor que se emplea y, al
mismo tiempo, le indica al circuito integrado que inicie el proceso de conversión.
Es importante tener en cuenta que el proceso de conversión toma de ocho a
doce ciclos de reloj, lo que significa que el tiempo mínimo de muestreo debe ser
mayor a 0.2 milisegundos, es decir, la frecuencia máxima de muestreo posible con el
adc en la configuración descrita y reloj a 110 KHz es de 5 KHz.

75
Además de estas consideraciones el ADC posee un multiplexor que permite
realizar el muestreo de diferentes variables con un solo equipo, pero no de forma
estrictamente simultanea, pues si se realiza el muestreo en tres canales “a la ves”, el
circuito integrado realizara el muestreo del primer canal, luego del segundo y
finalmente el tercero, es decir solo es posible realizar un muestreo en cada instante.
Esto implica que si se requiere emplear dos canales del dispositivo con la
frecuencia de reloj empleada, la máxima rata de muestreo es de unas 2500 muestras
por segundo (se reduce a la mitad respecto a las mismas condiciones con solo un
canal).
Es importante que la señal de reloj suministrada al dispositivo sea lo mas
pura posible, pues cualquier oscilación puede ser tomada como un pulso generando
errores en el funcionamiento del dispositivo.
3.3.2.3 CARACTERÍSTICAS DEL CONVERTIDOR ANALÓGICO
A DIGITAL
A la salida digital de un convertidor analógico a digital ideal de 4 bits se
gráfica en función del voltaje de entrada analógica. .
De manera análoga a lo que ocurre con los convertidores digital a analógico, la
resolución de un convertidor analógico a digital se define de dos maneras. Primero,
es el número máximo de códigos de salida digital.

76
Esta expresión de la resolución del convertidor es la misma que en el caso del
convertidor analógico y se repite aquí :
resolución = 2n
La resolución también se define como la razón de cambio del valor en el
voltaje de entrada, Vi, que se necesita para cambiar en 1 LSB la salida digital.
Si se conoce el valor del voltaje de entrada a escala completa, ViFS, que se
requiere para producir una salida digital de todos los unos, es posible calcular la
resolución mediante: resolución = VIFS / -1
En su forma más simple, la ecuación de entrada-salida de un convertidor
digital a analógico está dada por :
Código de salida digital = equivalente binario de D
donde D es igual al valor decimal de la salida digital ; o sea, D es igual al número de
bits menos significativos en la salida digital y D se calcula a partir de
D = Vi/resolución

77
Figura 3.7 Características de entrada Salida de un ADC.
78
CAPITULO IV.
CONDICIONES PARA UN DISEÑO DE ADQUISICION
DE DATOS (DAQ) .
Uno de los mas importantes parámetros de un sistema de entrada análoga es la
velocidad cual la tarjeta muestrea una señal. Para determinar una apropiada velocidad
de muestreo, se debería conocer el máximo rango de frecuencia de la señal que se
necesita muestrear, la precisión que se requiere desde sus datos, algún ruido en el
sistema que puede afectar a la señal análoga, y la compatibilidad de la tarjeta DAQ.
4.1 ENTORNO DE PROGRAMACIÓN GRAFICA.
La Programación Grafica surgió como resultado del caos producido cuando
los lenguajes tradicionales se enfrentaron a los grandes problemas de software. Puesto
que a medida que se van desarrollando los lenguajes, se van desarrollando también las
posibilidades de resolver problemas cada vez más complejos.
La programación gráfica es una nueva forma o técnica de programación que se
utiliza para desarrollar programas más eficientes y con gran fiabilidad.
4.1.1 VENTAJAS Y DESVENTAJAS DE LA PROGRAMACIÓN
GRAFICA. Encontramos en la programación grafica y tradicional.
EN LA PROGRAMACIÓN GRÁFICA. - Los programas se dividen en entidades
independientes que se relacionan con otras partes del programa, en donde cada
entidad se considera un “gráfico” que contiene datos (sus características) y
79
procedimientos (su comportamiento). Es decir, un “grafico” es una entidad que
contiene datos y los procedimientos que operan sobre esos datos. A los elementos de
un grafico se les conoce como “miembros”, los procedimientos que operan sobre los
gráficos se denominan “métodos” , y los datos se denominan “datos miembro”.
Entonces , un programa consta de un número de gráficos, los cuales se comunican
entre si mediante “métodos” a través del envío de “mensajes” que son acciones que
debe ejecutar el gráfico.
EN LA PROGRAMACIÓN TRADICIONAL .- los programas constan de
procedimientos y datos: donde cada procedimiento actúa como una “caja negra” que
realiza una tarea específica sin preocuparse de lo que hace internamente. Esta técnica
de programación permite desarrollar programas con empaquetamiento de código en
procedimientos que los vuelven transportables y modulares: aunque los datos se tratan
separadamente de los procedimientos, porque los datos utilizados son frecuentemente
globales o se pasan en los parámetros de los procedimientos.
4.2 LABVIEW Y ADQUISICIÓN DE DATOS EN PUERTOS
PARALELOS. Las funciones son.
LAS FUNCIONES IN PORT Y OUT PORT
Como su nombre lo indica, estas funciones o VI’s son las encargadas de
recibir y enviar datos a través de los puertos; se encuentran en la paleta de funciones
del diagrama, en la opción Advanced, en el recuadro de Port I/O y se distinguen por
los iconos mostrados en la figura .
80
Figura 4.1 Iconos de los VI’s inport y outport.
La función InPort posee dos parámetros de entrada: La dirección de registro,
que especifica la posición del registro empleado, por lo tanto es un dato numérico. El
segundo parámetro de entrada consiste en un dato booleano que indica si el dato
recibido desde la posición indicada es un byte (falso) o una palabra, es decir 2 bytes
(verdadero). La salida de esta función consiste en un dato de tipo numérico.
La función OutPort tiene tres parámetros de entrada: La dirección de registro,
que especifica la posición del registro empleado para enviar la información. El
segundo parámetro de entrada consiste en un dato booleano que indica si el dato
enviado a la posición indicada es un byte (falso) o una palabra (verdadero). El tercer
parámetro es el dato que se va a enviar.
TRATAMIENTO DE DATOS
El VI de control de adc y puerto paralelo contiene los algoritmos necesarios para
realizar la conversión del dato análogo a digital mediante el adc 0808 y la posterior
adquisición del dato a través del puerto paralelo. Estos algoritmos se organizan en
forma de secuencia de la siguiente forma:
- Envío de la señal de inicio de conversión.
- Tiempo de espera
- Recepción del dato a través del puerto paralelo.
El envío de la señal de inicio consiste en generar un pulso a través de un pin
del puerto paralelo. En la aplicación diseñada esta operación toma 3 pasos de una
secuencia con un total de cinco.

81
En cada uno se realiza la operación de salida de puerto, primero un cero luego
un uno y de nuevo un cero, así se tendrá el pulso de inicio de la conversión.
En el paso cuatro de la secuencia se tiene un tiempo de espera de un
milisegundo dado por la función de esperar mostrada en la figura .
Figura 4.2 Función “esperar”
Para acondicionar los datos recibidos a través de los registros de estado y
control del puerto paralelo es necesario aplicar mascaras realizando la operación AND
del dato recibido por cada registro.
Para el registro de estado la mascara es el dato 11111000 binario, mientras que
para el dato recibido través del registro de control es 00000111. Luego de esta
operación resta invertir los bits que sea necesario y agrupar el dato, como puede
apreciarse en la figura 4.3 .

82
Por ultimo se incluye el voltaje de referencia (que debe coincidir con el Vref del
ADC) para lograr finalmente un valor del voltaje registrado mediante el ADC.
4.2.1 USO DE LabVIEW
En este apartado se discuten los aspectos necesarios para familiarizarse con el uso de
LabVIEW, incluyendo las ventanas Panel y Diagram, menús de LabVIEW y la
ventana de jerarquía.
Asimismo se discuten otros aspectos necesarios como el uso de los modos edit
y run; creación de objetos; herramientas y obtención de ayuda.
4.2.2 VENTANAS PANEL Y DIAGRAM
Cada VI tiene dos ventanas separadas, pero relacionadas entre sí. La ventana Panel
contiene el panel frontal de nuestro Vi. La ventana Diagram es aquella en la cual se
construye el diagrama de bloques. Se puede conmutar entre ambas pantallas con el

83
comando Show Panel/Show Diagram (Mostrar Panel/Mostrar Diagrama) de¡ menú
Windows (Ventanas). Usando los comandos Tile (literalmente "baldosas"; podemos
traducir por Parcelas), dentro de ese mismo menú, podemos posicionar las ventanas
Panel y Diagram una al lado de la otra o una encima de la otra.
4.2.3 MENÚS DE LABVIEW
La programación en LabVIEW obliga a utilizar con frecuencia los diferentes menús.
La barra de menús de la parte superior de la ventana de un Vi contiene diversos
menús pull-down (desplegables). Cuando hacemos clic sobre un ítem o elemento de
esta barra, aparece un menú por debajo de ella. Dicho menú contiene elementos
comunes a otras aplicaciones Windows, como Open (Abrir), Save (Guardar) y Paste
(Pegar), y muchas otras particulares de LabVIEW.
La siguiente figura muestra la barra de menús para la versión 3.1 cuando la
ventana Panel está activa. El menú Functions reemplaza al Controis cuando la
ventana Diagram está abierta.
File (Archivo) Sus opciones se usan básicamente para abrir, cerrar, guardar
imprimir Vis.
Edit (Edición) Se usa principalmente para organizar el panel frontal y el
diagrama de bloques y establecer nuestras preferencias.

84
Operate (Función) Sus comandos sirven para ejecutar el Vi.
Controls (Controles) Con este menú, podemos añadir controles e indicadores al panel
frontal. Cada opción dentro de este menú visualiza una paleta con los controles e
indicadores para esa opción. El menú Controis sólo está disponible cuando la
ventana Panel está activa.
Functions (Funciones) Construimos el diagrama de bloques con este menú. Cada
opción visualiza una paleta con sus ¡conos disponibles. El menú
Functions sólo está disponible cuando la ventana Diagram está activa.
Windows (Ventanas) Se usa para situar rápidamente las ventanas abiertas y para abrir
ventanas de los diferentes subVIs.
Text (Texto) Se utiliza para cambiar la fuente, estilo y color del texto.
Heip (Ayuda) Presenta ayuda sobre los diferentes iconos y otros aspectos de
LabVIEW.
File (Archivo) Misma función.
Edit (Edición) Misma función.
Operate (Función) Presenta nuevas opciones como pueden ser la impresión cuando
85
acaba la ejecución.
Project (Proyecto) Presenta los niveles de jerarquía, los subvis que lo integran, los
que están sin abrir, busca Vis, etc.
Windows (Ventanas) Se utiliza básicamente para mostrar (Show) ventanas, como
pueden ser las de información, historia¡, controles/funciones, herramientas,
portapapeles, etc.
Help (Ayuda) Misma función.
El menú de LabVIEW que utilizaremos con más frecuencia es el menú pop-up
(emergente) de objetos, al cual accedemos situando el cursor sobre el objeto en
cuestión y pulsando el botón derecho del ratón. Si la pulsación se hace sobre un
espacio vacío, el menú que se obtendrá vendrá en función de la herramienta
seleccionada.
4.2.4 ADQUISICIÓN DE DATOS.- Un desarrollo en LabView se basa en el
empleo de los “VI” o instrumentos virtuales, que en un sentido practico consiste en un
objeto con entradas y salidas, y una función especificada dentro de este. La estructura
de este lenguaje de programación denominado G permite llamar o incluir un VI
dentro de otro, permitiendo jerarquizar los VI’s.
La creación de un VI dentro de Labview supone dos partes: el diseño del panel
frontal, en donde se encuentran las entradas y salidas (controles e indicadores) del VI,
86
y el diagrama de flujo de datos, en donde se configura el funcionamiento del VI; en
un sentido practico es el algoritmo que define el comportamiento de la aplicación.
4.2.5 ANALISIS DE DATOS.- Para acceder a la paleta de controles dentro del
panel de control basta con oprimir el botón derecho del ratón teniendo el puntero
sobre la ventana correspondiente a este, de forma similar se logra el acceso a la paleta
de funciones dentro del diagrama de flujo de datos (llamado simplemente diagrama).
LabView permite manipular distintas estructuras de datos, como boléanos
(binarios), numéricos, cadenas, arreglos y clusters. Los clusters son una poderosa
estructura que permite realizar arreglos compuestos por distintos tipos de datos.
Dentro del Diagrama la estructura del dato se distingue por el color que toma el lazo
correspondiente, por ejemplo, los boléanos se distinguen por el color verde
4.2.6 VISUALIZACIÓN DE DATOS.- Como ya se menciono con
anterioridad, National Instruments LabView es la plataforma sobre la cual se
desarrollo el software de esta aplicación. LabView es un software de programación
grafica, obviamente enfocada al manejo de objetos, y desarrollado pensando en
sistemas de instrumentación y control, lo que lo hace de gran utilidad para la
adquisición y análisis de los datos.
Por ultimo es importante tener en cuenta que en el ambiente de programación
G (LabView) el puntero del ratón cumple diversas funciones, distinguiéndose cada
una por la figura que toma el puntero, por ejemplo si el cursor tiene forma de carrete
de hilo funciona como herramienta de conexión.
87
4.2.7 CREACIÓN DE INSTRUMENTOS VIRTUALES. Tenemos.
Uso de los modos EDIT (Edición) y RUN (Ejecución)
Podernos crear o cambiar un VI cuando éste está en el modo Edit. En él, las
herramientas de edición se habilitan en la paleta de¡ modo Edit, por debajo de la barra
de¡ menú de ventana, como se indica a continuación:
Cuando estamos listos para probar nuestro VI, hacemos clic sobre el botón de
modo Q o seleccionamos Change to Run Mode (Cambio al Modo de Ejecución)
desde el menú Operate. Haciendo esto compilamos el Vi y lo ponemos en el modo
Run. En este punto podemos disponer de las opciones de depuración, ejecución del
VI, diferentes modos de ejecución, impresión de datos, etc.
Si lo que queremos es ejecutar el Vi desde el modo Edit sin pasar al modo
Run, hemos de hacer clic sobre la flecha de ejecución. Si fuese necesario, LabVIEW
compilaría primero el VI, después conmuta al modo Run, ejecuta el Vi y vuelve al
modo Edit una vez que el Vi se ha ejecutado.
Éste es uno de los puntos que ha sufrido una mayor modificación en la versión
Los iconos correspondientes a estos modos se indican a continuación:
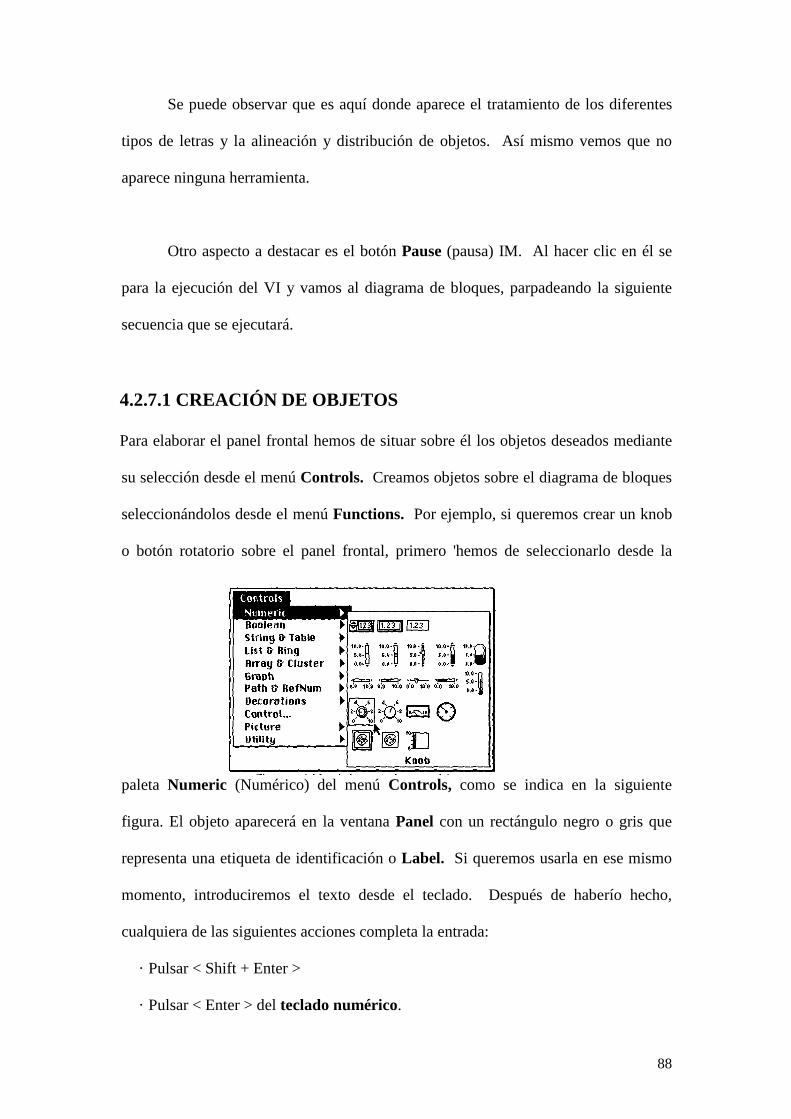
88
Se puede observar que es aquí donde aparece el tratamiento de los diferentes
tipos de letras y la alineación y distribución de objetos. Así mismo vemos que no
aparece ninguna herramienta.
Otro aspecto a destacar es el botón Pause (pausa) IM. Al hacer clic en él se
para la ejecución del VI y vamos al diagrama de bloques, parpadeando la siguiente
secuencia que se ejecutará.
4.2.7.1 CREACIÓN DE OBJETOS
Para elaborar el panel frontal hemos de situar sobre él los objetos deseados mediante
su selección desde el menú Controls. Creamos objetos sobre el diagrama de bloques
seleccionándolos desde el menú Functions. Por ejemplo, si queremos crear un knob
o botón rotatorio sobre el panel frontal, primero 'hemos de seleccionarlo desde la
paleta Numeric (Numérico) del menú Controls, como se indica en la siguiente
figura. El objeto aparecerá en la ventana Panel con un rectángulo negro o gris que
representa una etiqueta de identificación o Label. Si queremos usarla en ese mismo
momento, introduciremos el texto desde el teclado. Después de haberío hecho,
cualquiera de las siguientes acciones completa la entrada:
· Pulsar < Shift + Enter >
· Pulsar < Enter > del teclado numérico.

89
· Clic sobre el botón Enter en la paleta de herramientas.
· Clic fuera de la etiqueta.
Cuando creamos un objeto sobre el panel frontal, al mismo tiempo se crea el
terminal correspondiente sobre el diagrama de bloques. Este terminal se usa tanto
para leer datos desde un control como para enviarlos a un indicador.
Si se selecciona Show Diagrarn (Mostrar Diagrama) desde el menú
Windows, podremos ver el diagrama correspondiente al panel frontal. Este diagrama
contendrá terminales para todos los controles e indicadores del panel frontal.
Todos los objetos en LabVIEW tienen asociados menús pop-up, los cuales
podemos obtener pulsando el botón derecho del ratón sobre dicho objeto. Mediante la
selección de sus diferentes opciones podremos actuar sobre determinados parámetros,
como el aspecto o comportamiento de ese objeto.

90
Por ejemplo, si no hubiésemos introducido texto en la etiqueta del control
anterior, ésta habría desaparecido al hacer clic en cualquier otro lado. Para volver
a visualizarla tendríamos que obtener el menú pop-up de ese control y seleccionar
Label del menú Show (figura ).
Los menús Controis y Functions se hallan como ventanas flotantes que
podemos tener visibles o no. Si no lo están, utilizaremos la opción Show Controls
Palette (Mostrar paleta de controles) o Show Functions Palette (Mostrar paleta de
funciones) del menú Windows.
Otra opción es hacer clic con el botón derecho de¡ ratón en cualquier área libre
de la pantalla: Aparecerá el menú Controls o Functions según estemos en la ventana
Panel o Diagrarn, respectivamente.
4.2.7.2 HERRAMIENTAS DE LabVIEW
Una herramienta es un modo de funcionamiento especial del ratón. Las usamos para
llevar a cabo funciones específicas de edición o ejecución.

91
• La herramienta Operating (Funcionamiento) maneja los controles del panel
frontal (y los indicadores en el modo Edit). Es la única herramienta disponible en el
modo Run.
• La herramienta Positioning 1 (Situación) selecciona, mueve y redimensiona
objetos.
• La herramienta Labeling (Etiquetado) crea y edita textos.
• La herramienta Wiring (Cableado) enlaza objetos del diagrama de bloques y
asigna a los terminales del conector del Vi los controles e indicadores del panel
frontal.
• La herramienta Coloring (Coloración) colorea diversos objetos y los fondos.
Se puede cambiar de herramienta haciendo lo siguiente:
·Clic sobre el icono de la herramienta que queremos.
·Usando la tecla TAB para seleccionar la siguiente herramienta.
·Pulsando la tecla SPACE para cambiar entre la herramienta Operatíng y Positioning
cuando la ventana Panel está activa, y entre las herramientas Wiring y Positioning
cuando la ventana Diagram es la activa.
• Operate Value (Valor Operativo) H. Misma función que Operating.
• Position/Size/Select (SituaciónTamaño / Selección') M. Realiza la misma
función que Positioninq.
• Edit Text (Edición de Texto) Misma función que Labeling.
• Connect Wire (Conexión de Cables) @. Misma función que Wiring.
• Object Popup (Menú pop-up del objeto) M. Función nueva. Despliega el menú
pop-up asociado al objeto. Tiene el mismo efecto que si pulsamos el botón derecho
del ratón sobre el objeto.

92
• Scroll Window (Desplazamiento de la pantalla) IJ. Función nueva. Desplaza la
pantalla en la dirección que deseemos para ver posibles zonas ocultas.
• Set/Clear Breakpoint (Establecer/Quitar puntos de ruptura) ál. Función nueva.
Permite poner tantos puntos de ruptura como deseemos a lo largo del diagrama de
bloques. Cuando durante la ejecución se llega a uno de ellos, LabVIEW conmuta
automáticamente al diagrama de bloques. Usamos esta misma herramienta para quitar
los puntos.
• Probe Data (Sonda de datos).
4.2.7.3 TIPOS DE DATOS EN LABVIEW. CONTROLES E
INDICADORES
LabVIEW ofrece una gran variedad de tipos de datos con los que podemos
trabajar respondiendo a las necesidades reales con las que nos encontraremos. Uno de
los aspectos más significativos de LabVIEW es la diferenciación que efectúa en el
diagrama de bloques entre los diferentes tipos de controles o indicadores, basada en
que cada uno de ellos tiene un color propio.
De esta manera, y como consecuencia de una memorización o asimilación
práctica, nos será muy fácil identificarlos y reconocer inmediatamente si estamos
trabajando con el tipo de datos adecuado. Distinguimos los siguientes tipos, los
cuales pueden funcionar tanto como controles como indicadores (entre paréntesis
queda reflejado el color con el que queda representado en el diagrama de bloques):
Boolean (verde claro)
93
Los tipos de datos booleanos son enteros de 16 bits. El bit más significativo
contiene el valor Booleano. Si el bit 15 se pone a 1, entonces el valor del control o
indicador es true (verdadero); por el contrario, si este bit 15 vale 0, el valor de la
variable booleana será false (falso).
Numéricos: Hay diferentes tipos
Extended (naranja) Según el modelo de ordenador que estemos utilizando los
números de coma flotante con precisión extendida presentan el siguiente formato:
Macintosh:96 bits (formato precisión extendida MC68881 - MC68882)
Windows: 80 bits (formato precisión extendida 80287)
Sun: Formato 128 bits
HP-UX: Son almacenados como los números en coma flotante de doble
precisión.
Double (naranja) Los números en coma flotante de doble precisión cumplen con el
formato de doble precisión IEEE de 64 bits. Es el valor por defecto de LabVIEW.
Single (naranja) Los números en coma flotante de precisión simple cumplen con el
formato de precisión simple IEEE de 32 bits.
Long lnteger (azul) Los números enteros largos tienen un formato de 32 bits, con o sin
signo.

94
Word lnteger (azul) Estos números tienen un formato de 16 bits, con o sin signo.
Byte lnteger (azul) Tienen un formato de 8 bits, con o sin signo.
Unsigned Long (azul) Entero largo sin signo.
Unsigned Word (azul) Palabra sin signo.
Unsigned Byte (azul) Byte sin signo.
Complex Extended (naranja)Número complejo con precisión extendida.
Complex Double (naranja) Complejo con precisión doble.
Complex Single (naranja) Complejo con precisión simple.
Arrays (depende del tipo de datos que contenga)
LabVIEW almacena el tamaño de cada dimensión de un array como long integer
seguido por el dato. El ejemplo que sigue muestra un array unidimensional con
números en coma flotante de precisión simple. Los números decimales a la izquierda
presentan el desplazamiento donde empieza cada array en la posición de memoria.

95
Los arrays booleanos se almacenan de manera diferente a los booleanos
escalares. Estos arrays se almacenan como bits empaquetados. El tamaño de la
dimensión viene dado en bits en lugar de bytes. El bit 0 se guarda en la posición más
alta de memoria (215), y el bit 15 en la posición más baja (20).
La figura muestra un ejemplo de un array booleano bi-dimensional. El elemento
0 de cada dimensión se almacena en una nueva palabra entera ignorándose los bits sin
usar de las dimensiones previas.
Strings (rosa) LabVIEW almacena los strings como si fueran un array uni-
dimensional de bytes enteros (caracteres de 8 bits).
Handies Un handie es un puntero que apunta a un bloque de memoria
relocalizable. Un handie sólo apunta a datos definidos por el usuario. LabVIEW no
reconoce qué es lo que hay en ese bloque de memoria. Es especialmente útil para

96
pasar un bloque de datos por referencia entre nodos de interficie de código (Code
Interface Nodes o CiNs).
Paths (verde oscuro) LabVIEW almacena las componentes tipo y número de
un path en palabras enteras, seguidas inmediatamente por las componentes del path.
El tipo de path es 0 para un path absoluto y 1 para un path relativo. Cualquier
otro valor indicaría que el path no es válido. Cada componente del path es una cadena
Pascal (P-string), en la cual el primer byte es la longitud de la P-string (sin incluir el
byte de longitud).
Clusters (marrón o rosa) Un cluster almacena diferentes tipos de datos
de acuerdo a las siguientes normas:
Los datos escalares se almacenan directamente en el cluster; los arrays,strings,
handies y paths se almacenan indirectamente. El cluster almacena un handie que
apunta al área de memoria en la que LabVIEW ha almacenado realmente los datos.
Para conectar terminales se usa la herramienta Wiring (cableado).
4.2.8 PROGRAMACIÓN ESTRUCTURAL
A la hora de programar, muchas veces es necesario ejecutar un mismo conjunto
de sentencias un número determinado de veces, o que éstas se repitan mientras se
cumplan ciertas condiciones. También puede ocurrir que queramos ejecutar una u

97
otra sentencia dependiendo de las condiciones fijadas o simplemente forzar que unas
se ejecuten siempre antes que otras.
Para ello LabVIEW dispone de cuatro estructuras fácilmente diferenciables
por su apariencia y disponibles en la opción Structures del menú Function de la
ventana Diagram:
4.2.8.1 ESTRUCTURAS ITERATIVAS: FOR LOOP Y WHILE
LOOP
FORLOOP
Usaremos For Loop cuando queramos que una operación se repita un número
determinado de veces. Su equivalente en lenguaje convencional es:
For i = 0 to N-1
Ejecuta subdiagrama
Al colocar un For Loop en la ventana Diagram observamos que tiene
asociados dos terminales:
1.- Terminar contador: Contiene el número de veces que se ejecutará el subdiagrama
creado en el interior de la estructura. El valor del contador se fijará externamente (ver
también Arrays en el capítulo 6).
2.- Terminal de iteración: Indica el número de veces que se ha ejecutado la
estructura: Cero durante la primera iteración, uno duretnte la segunda y así hasta
N-1.
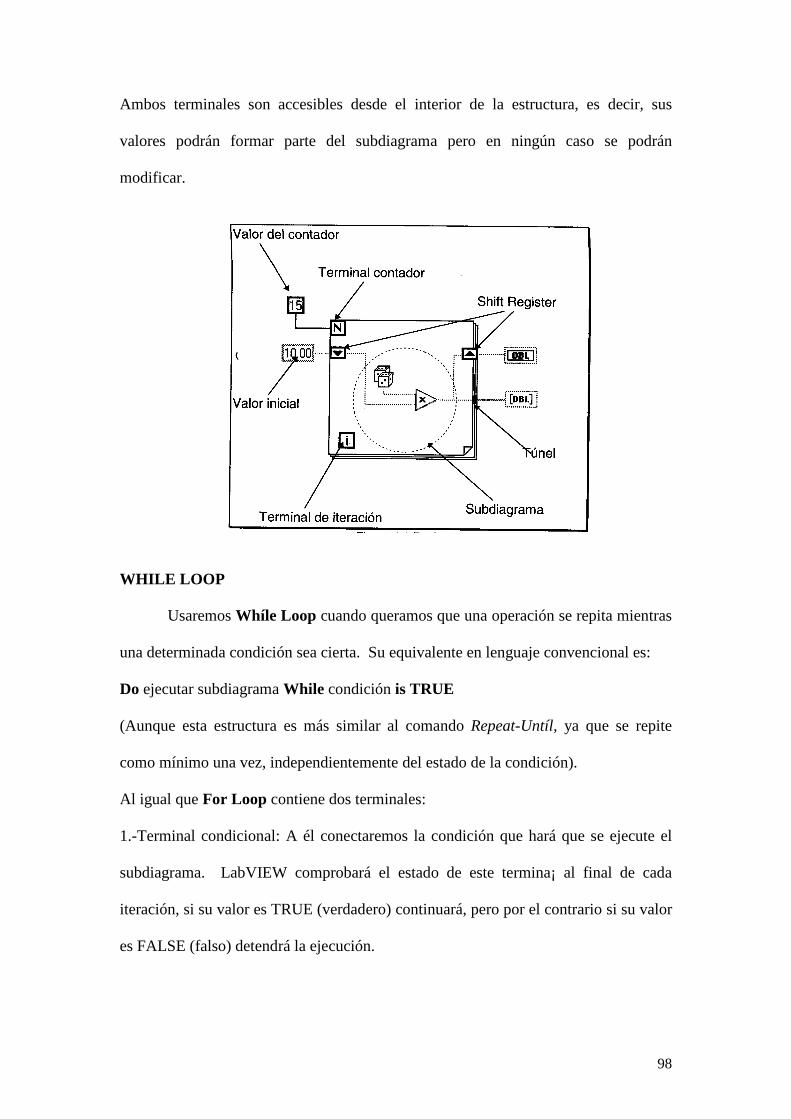
98
Ambos terminales son accesibles desde el interior de la estructura, es decir, sus
valores podrán formar parte del subdiagrama pero en ningún caso se podrán
modificar.
WHILE LOOP
Usaremos Whíle Loop cuando queramos que una operación se repita mientras
una determinada condición sea cierta. Su equivalente en lenguaje convencional es:
Do ejecutar subdiagrama While condición is TRUE
(Aunque esta estructura es más similar al comando Repeat-Untíl, ya que se repite
como mínimo una vez, independientemente del estado de la condición).
Al igual que For Loop contiene dos terminales:
1.-Terminal condicional: A él conectaremos la condición que hará que se ejecute el
subdiagrama. LabVIEW comprobará el estado de este termina¡ al final de cada
iteración, si su valor es TRUE (verdadero) continuará, pero por el contrario si su valor
es FALSE (falso) detendrá la ejecución.
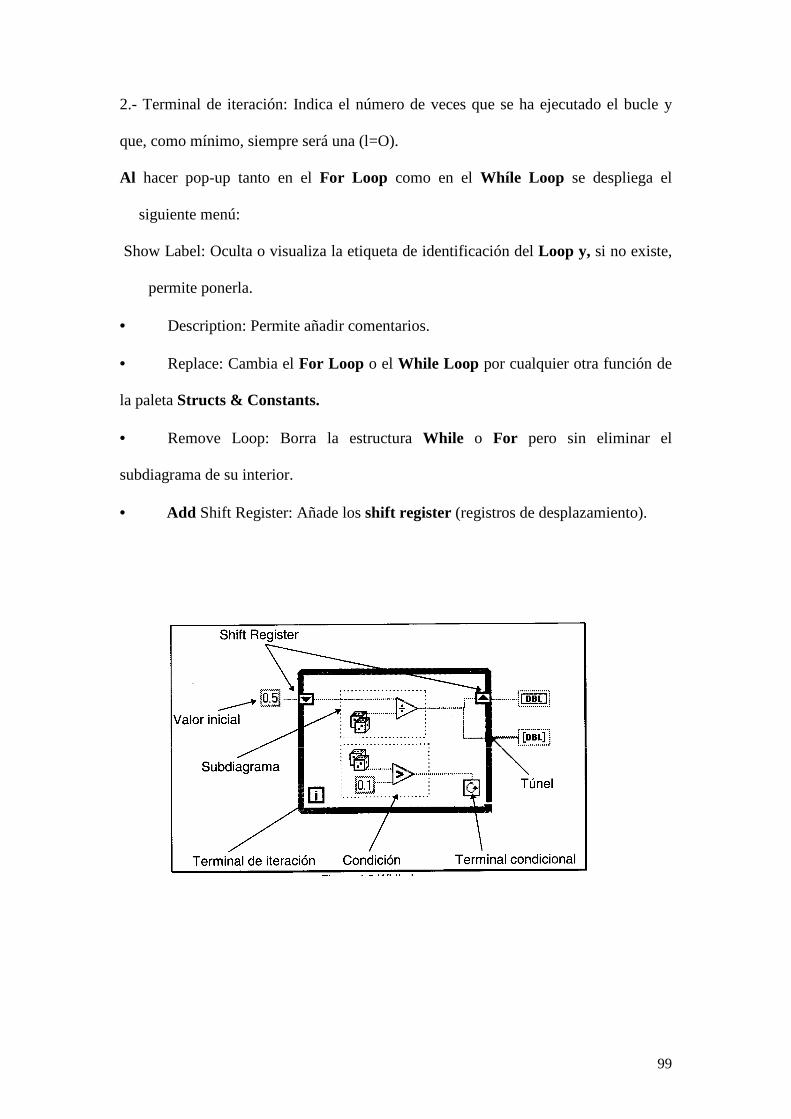
99
2.- Terminal de iteración: Indica el número de veces que se ha ejecutado el bucle y
que, como mínimo, siempre será una (l=O).
Al hacer pop-up tanto en el For Loop como en el Whíle Loop se despliega el
siguiente menú:
Show Label: Oculta o visualiza la etiqueta de identificación del Loop y, si no existe,
permite ponerla.
• Description: Permite añadir comentarios.
• Replace: Cambia el For Loop o el While Loop por cualquier otra función de
la paleta Structs & Constants.
• Remove Loop: Borra la estructura While o For pero sin eliminar el
subdiagrama de su interior.
• Add Shift Register: Añade los shift register (registros de desplazamiento).

100
4.2.8.2 REGISTROS DE DESPLAZAMIENTO
Los registros de desplazamiento o shift register son variables locales, disponibles
tanto en el For Loop como en el While Loop, que permiten transferir los valores del
final de una iteración al principio de la siguiente.
Inicialmente shift register tiene un par de terminales colocados a ambos lados
del Loop; el terminal de la derecha almacena el valor final de la iteración hasta que
una nueva hace que este valor se desplace al terminal de la izquierda, quedando en el
de la derecha el nuevo valor. Un mismo registro de, desplazamiento puede tener más
de un terminal en el lado izquierdo; para añadirlo escogeremos la opción Add
Element (añadir elemento) del menú pop-up. Cuantos más terminales tengamos en el
lado izquierdo más valores de iteraciones anteriores podremos almacenar.
El menú pop-up tiene otros dos comandos:
• Remove element: Borra un terminal del lado izquierdo siempre y cuando el
registro de desplazamiento tenga asociado más de uno.
• Remove All: Borra todo el registro de desplazamiento, tanto los termínales de
la izquierda como el de la derecha.
Un mismo Loop puede tener varios registros de desplazamientos siendo
conveniente inicializarlos, para que los terminales de la izquierda tengan el valor

101
deseado cuando se produzca la primera iteración. Shift register puede trabajar con
cualquier tipo de datos siempre y cuando los datos que se conecten a cada terminal
sean del mismo tipo.
Al finalizar la ejecución de todas las iteraciones el último valor quedará en el
terminal de la derecha; uniéndolo a un indicador del mismo tipo de dato fuera del
Loop podremos obtener su valor.
Pero existe otra posibilidad para pasar datos de forma automática desde el
interior de la estructura al exterior. Cuando un cable atraviesa los límites del Loop,
aparece en el borde un nuevo terminal llamado túnel que hace de conexión entre el
interior y el exterior, de forma que los datos fluyen a través de él después de cada
iteración del Loop, pudiendo guardar de esta manera no sólo el último valor de todas
las iteraciones sino también los valores intermedios. A esta posibilidad que tienen
tanto el For como el While de acumular arrays en sus límites automáticamente se le
llama auto-indexing o autoindexado.
4.2.6 PROGRAMACIÓN ESTRUCTURADA
LabVIEW habilita por defecto auto-indexing en el For Loop ya que es más
frecuente utilizar esta estructura para crear arrays que no el While Loop, en el cual
esta opción está deshabilitada por defecto y cuya utilización podría provocar
problemas de memoria debido a que no sabemos cuantas veces se va a ejecutar. No
obstante, haciendo pop-up en el túnel se puede habilitar o deshabilitar esta opción.
4.2.6.1 ESTRUCTURAS CASE Y SEQUENCE

102
Este tipo de estructuras se diferencia de las iterativas en que puede tener
múltiples subdiagramas, de los cuales solamente uno es visible a la vez. En la parte
superior de cada estructura existe una pequeña ventana que muestra el identificador
del subdiagrama que se está mostrando. A ambos lados de esta ventana existen dos
botones que decrementan o incrementan el identificador de forma que podamos ver el
resto de subdiagramas.
CASE
Usaremos la estructura Case en aquellas situaciones en las que el número de
alternativas disponibles sean dos o más. Según qué valor tome el selector dentro de
los n valores posibles, se ejecutará en correspondencia uno de los n subdiagramas.
La estructura Case consta de un terminal llamado selector y un conjunto de
subdiagramas, cada uno de los cuales está dentro de un case o suceso y etiquetado por
un identificador del mismo tipo que el selector; éste será booleano o numérico. Si se
conecta un valor booleano al selector, la estructura tendrá dos Case: False y True.
Pero si se conecta un valor numérico la estructura podrá tener hasta 214 Case.

103
En este caso la estructura Case engloba dos sentencias diferentes de otros
lenguajes convencionales:
1.- lf condición true then ejecutar case true
else ejecutar case false
2.- Case selector of
l:ejecutar case 1;
n:ejecutar case n
end
Case no cuenta con los registros de desplazamiento de las estructuras
iterativas pero sí podemos crear los túneles para sacar o introducir datos. Si un case o
suceso proporciona un dato de salida a una determinada variable será necesario que
todos los demás también lo hagan; si no ocurre de esta manera será imposible ejecutar
el programa.
SEQUENCE
Esta estructura no tiene su homóloga en los diferentes lenguajes
convencionales, ya que en éstos las sentencias se ejecutan en el orden de aparición
pero, como ya sabemos, en LabVIEW una función se ejecuta cuando tiene disponible
todos los datos de entrada. Se produce de esta manera una dependencia de datos que
hace que la función que recibe un dato directa o indirectamente de otra se ejecute
siempre después, creándose un flujo de programa.

104
Pero existen ocasiones en que esta dependencia de datos no existe y es necesario
que un subdiagrama se ejecute antes que otro; es en estos casos cuando usaremos la
estructura Sequence para forzar un determinado flujo de datos. Cada subdiagrama
estará contenido en un frame o marco y estos se ejecutarán en orden de aparición:
Primero el frame 0 o marco 0, después el frame 1 y así, sucesivamente, hasta el
último.
Al contrario del Case, si un frame aporta un dato de salida a una variable los
demás no tendrán por qué hacerlo. Pero tendremos que tener en cuenta que el dato
estará solamente disponible cuando se ejecute el último frame y no cuando se ejecute
el frame que transfiere el dato.
Debido a la similitud de los menús pop-up de la estructuras Case y Sequence
vamos a estudiarlos de forma conjunta indicando en cada caso las posibles diferencias
que puedan existir:

105
• Show Label: Oculta o visualiza la etiqueta de identificación de la estructura y, si
no existe, permite ponerla.
• Description: Permite añadir comentarios.
• Replace: Cambia la estructura Case o Sequence por cualquier otra función de la
paleta Structs & Constants.
• Remove Case Structure o Sequence: Borra completamente la estructura Case o
Sequence y todos los subdiagramas menos el que se esté visualizando en el momento
de la ejecución de este comando.
• Add Sequence Local (añadir secuencia local): Esta opción está sólo disponible en
el menú de la estructura Sequence y se utiliza para pasar datos de un frame a otro.
Una pequeña flecha con la punta hacia el exterior de la estructura indica el
frame de origen de la secuencia local, mientras que una flecha apuntando hacia el
interior indica que la secuencia local contiene un dato de salida. Todos los frames
posteriores al que contiene la secuencia local que origina el dato podrán disponer de
él, no siendo así para los frames anteriores en los cuales aparecerá un cuadrado vacío
que indicará que los datos no están disponibles.
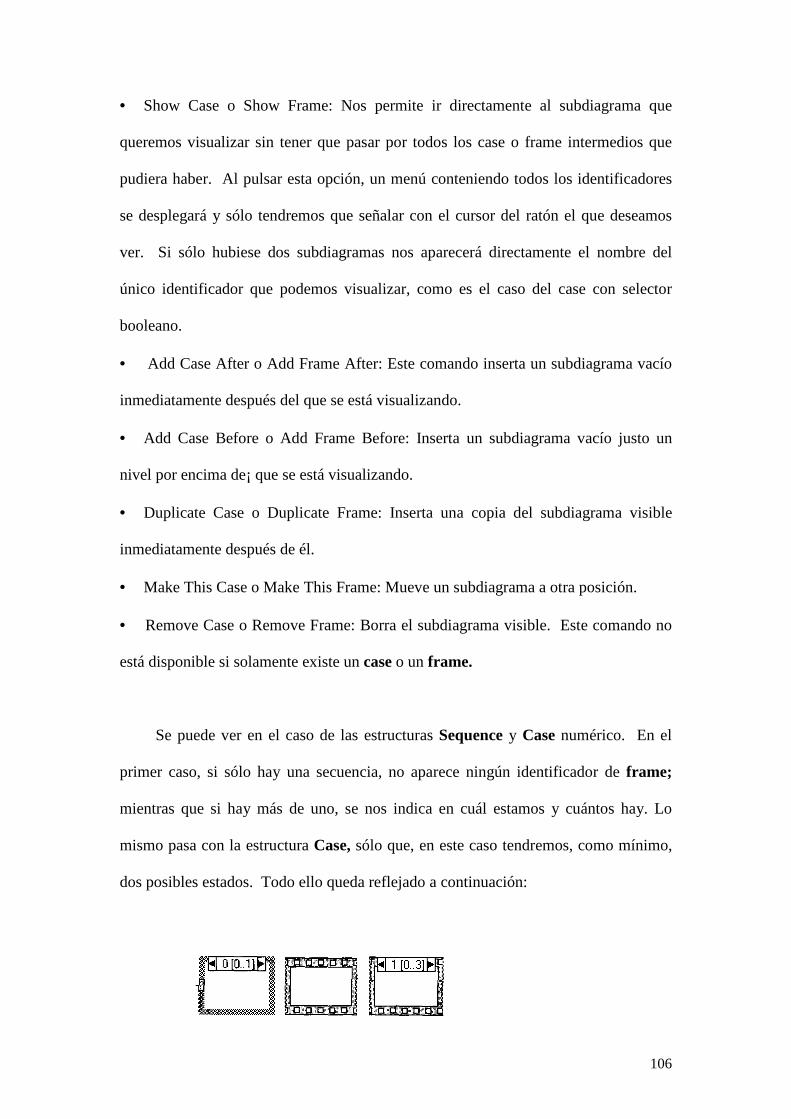
106
• Show Case o Show Frame: Nos permite ir directamente al subdiagrama que
queremos visualizar sin tener que pasar por todos los case o frame intermedios que
pudiera haber. Al pulsar esta opción, un menú conteniendo todos los identificadores
se desplegará y sólo tendremos que señalar con el cursor del ratón el que deseamos
ver. Si sólo hubiese dos subdiagramas nos aparecerá directamente el nombre del
único identificador que podemos visualizar, como es el caso del case con selector
booleano.
• Add Case After o Add Frame After: Este comando inserta un subdiagrama vacío
inmediatamente después del que se está visualizando.
• Add Case Before o Add Frame Before: Inserta un subdiagrama vacío justo un
nivel por encima de¡ que se está visualizando.
• Duplicate Case o Duplicate Frame: Inserta una copia del subdiagrama visible
inmediatamente después de él.
• Make This Case o Make This Frame: Mueve un subdiagrama a otra posición.
• Remove Case o Remove Frame: Borra el subdiagrama visible. Este comando no
está disponible si solamente existe un case o un frame.
Se puede ver en el caso de las estructuras Sequence y Case numérico. En el
primer caso, si sólo hay una secuencia, no aparece ningún identificador de frame;
mientras que si hay más de uno, se nos indica en cuál estamos y cuántos hay. Lo
mismo pasa con la estructura Case, sólo que, en este caso tendremos, como mínimo,
dos posibles estados. Todo ello queda reflejado a continuación:
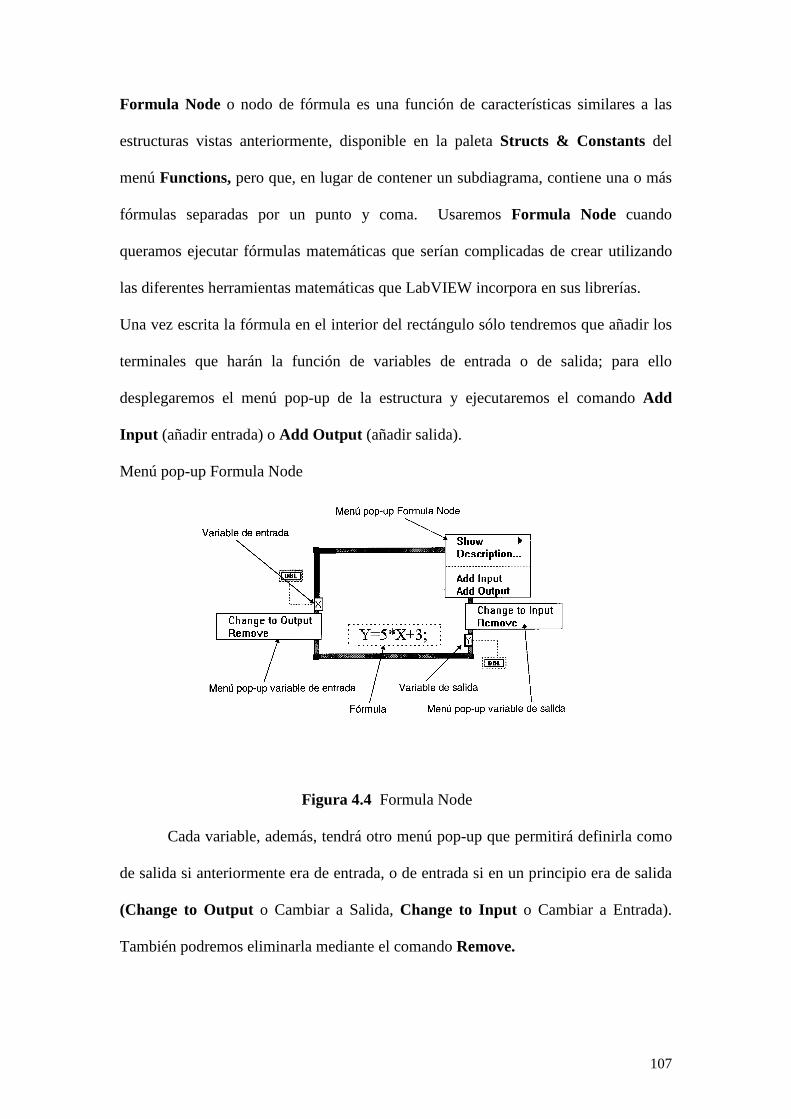
107
Formula Node o nodo de fórmula es una función de características similares a las
estructuras vistas anteriormente, disponible en la paleta Structs & Constants del
menú Functions, pero que, en lugar de contener un subdiagrama, contiene una o más
fórmulas separadas por un punto y coma. Usaremos Formula Node cuando
queramos ejecutar fórmulas matemáticas que serían complicadas de crear utilizando
las diferentes herramientas matemáticas que LabVIEW incorpora en sus librerías.
Una vez escrita la fórmula en el interior del rectángulo sólo tendremos que añadir los
terminales que harán la función de variables de entrada o de salida; para ello
desplegaremos el menú pop-up de la estructura y ejecutaremos el comando Add
Input (añadir entrada) o Add Output (añadir salida).
Menú pop-up Formula Node
Figura 4.4 Formula Node
Cada variable, además, tendrá otro menú pop-up que permitirá definirla como
de salida si anteriormente era de entrada, o de entrada si en un principio era de salida
(Change to Output o Cambiar a Salida, Change to Input o Cambiar a Entrada).
También podremos eliminarla mediante el comando Remove.
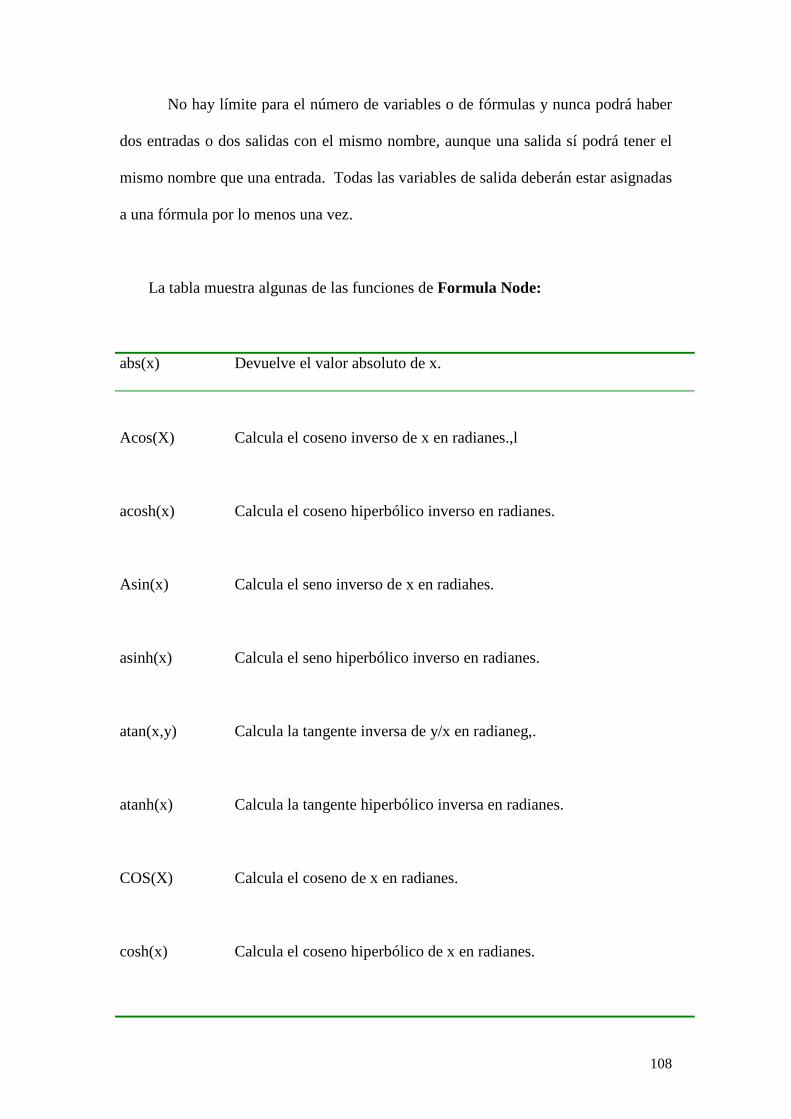
108
No hay límite para el número de variables o de fórmulas y nunca podrá haber
dos entradas o dos salidas con el mismo nombre, aunque una salida sí podrá tener el
mismo nombre que una entrada. Todas las variables de salida deberán estar asignadas
a una fórmula por lo menos una vez.
La tabla muestra algunas de las funciones de Formula Node:
abs(x) Devuelve el valor absoluto de x.
Acos(X) Calcula el coseno inverso de x en radianes.,l
acosh(x) Calcula el coseno hiperbólico inverso en radianes.
Asin(x) Calcula el seno inverso de x en radiahes.
asinh(x) Calcula el seno hiperbólico inverso en radianes.
atan(x,y) Calcula la tangente inversa de y/x en radianeg,.
atanh(x) Calcula la tangente hiperbólico inversa en radianes.
COS(X) Calcula el coseno de x en radianes.
cosh(x) Calcula el coseno hiperbólico de x en radianes.

109
cot(x) Calcula la cotangente de x en radianes.
CSC(X) Calcula la cosecante de x en radianes.
exp(x) Calcula el valor de e elevado a x.
ln(x) Calcula el logaritmo natural de x.
log(x) Calcula el logaritmo de x en base 1 0.
log2(X) Calcula el logaritmo de x en base 2.
max(X,Y) Compara x con y, y devuelve el mayor valor.
min(x,y) Compara x con y, y devuelve el menor valor.
mod(x@y)@ Calcula el cociente de x/y.
rando Genera un número aleatorio entre 0 y 1.
Sic(x) Calcula la secante de x en radianes.
sign(x) Devuelve 1 si x es mayor que 0, 0 si x es igual a 0 y -1 si x es menor
que cero.

110
Sin(x) Calcula el seno de x en radianes.
sinc(x) Calcula el seno de x dividido por'x en radianes.
sinh(X)@ Calcula el seno hiperbólico de x en radianes.
sqrt(x) Calcula la raíz cuadrada de x.
Tan(x) Calcula la tangente de x en radianes.
tanh(x) Calcula la tangente hiperbólico de x en radianes.
4.2.6.2 VARIABLES LOCALES Y GLOBALES
Las variables son imprescindibles en cualquier tipo de problemas, ya que
permiten almacenar la información necesaria para su resolución.
En LabVIEW todos los controles introducidos en el Panel Frontal que generan
un termina¡ en la ventana Diagrama van a ser variables, identificabas por el nombre
asignado en la etiqueta. Pero puede ocurrir que queramos utilizar el valor de cierta
variable en otro subdiagrama o en otro Vi o, simplemente, que queramos guardar un
resultado intermedio. La forma mas sencilla de hacerlo es generando variables
locales y/o globales dependiendo de la aplicación.
VARIABLES LOCALES
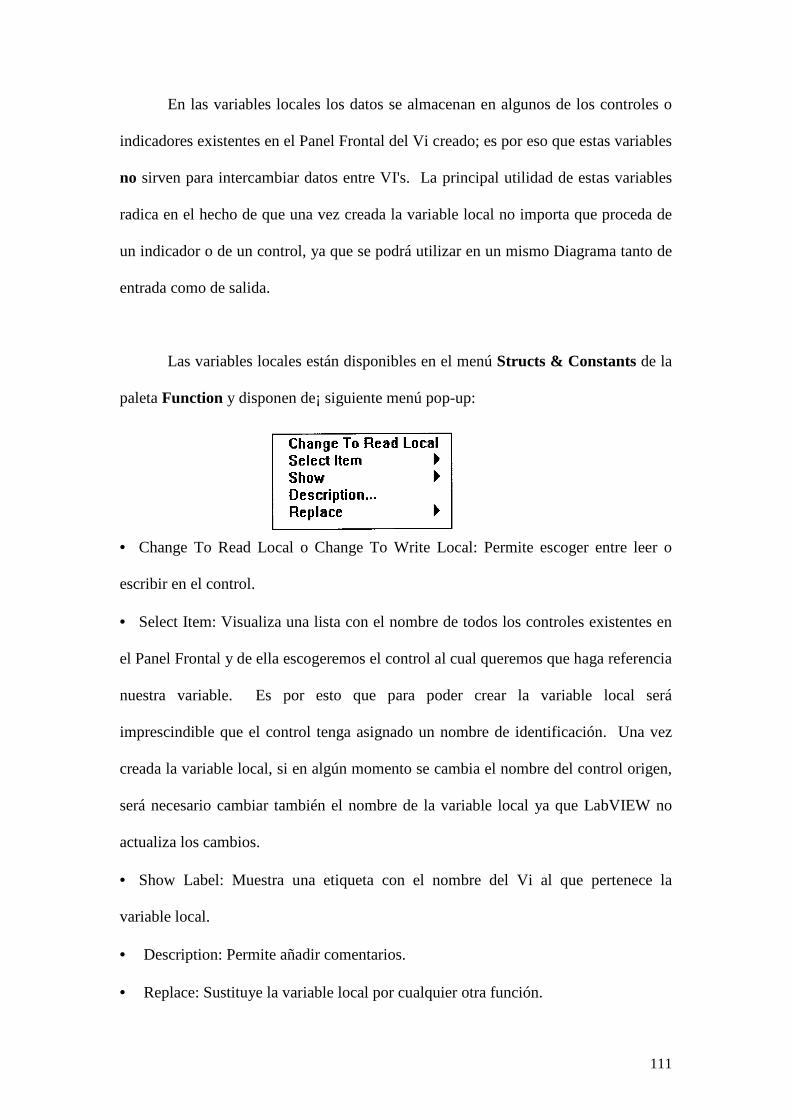
111
En las variables locales los datos se almacenan en algunos de los controles o
indicadores existentes en el Panel Frontal del Vi creado; es por eso que estas variables
no sirven para intercambiar datos entre VI's. La principal utilidad de estas variables
radica en el hecho de que una vez creada la variable local no importa que proceda de
un indicador o de un control, ya que se podrá utilizar en un mismo Diagrama tanto de
entrada como de salida.
Las variables locales están disponibles en el menú Structs & Constants de la
paleta Function y disponen de¡ siguiente menú pop-up:
• Change To Read Local o Change To Write Local: Permite escoger entre leer o
escribir en el control.
• Select Item: Visualiza una lista con el nombre de todos los controles existentes en
el Panel Frontal y de ella escogeremos el control al cual queremos que haga referencia
nuestra variable. Es por esto que para poder crear la variable local será
imprescindible que el control tenga asignado un nombre de identificación. Una vez
creada la variable local, si en algún momento se cambia el nombre del control origen,
será necesario cambiar también el nombre de la variable local ya que LabVIEW no
actualiza los cambios.
• Show Label: Muestra una etiqueta con el nombre del Vi al que pertenece la
variable local.
• Description: Permite añadir comentarios.
• Replace: Sustituye la variable local por cualquier otra función.

112
VARIABLES GLOBALES
Las variables globales son un tipo especial de VI, que únicamente dispone de
Panel Frontal, en el cual se define el tipo de dato de la variable y el nombre de
identificación imprescindible para después podernos referir a ella.
Cuando escogemos la función Global del menú Structs & Constants creamos
un nuevo terminal en el Diagrama; este terminal corresponde a un VI que inicialmente
no contiene ninguna variable. Para poderias añadir haremos doble clic en el terminal
y se abrirá el panel frontal. Una vez abierto, las variables se definen igual que
cualquier control o indicador de un VI normal. Podemos crear un Vi para cada
variable global o definirlas todas en el mismo, que es la opción más indicada para
cualquier aplicación. Cuando terminemos de colocar todas las variables grabaremos
el VI y lo cerraremos. Si una vez cerrado queremos añadir nuevas variables, bastará
con volverlo a abrir e introducir los cambios necesarios. Para añadir nuevos
terminales que hagan referencia a las variables globales creadas, no volveremos a
ejecutar la función Global ya que esto crearía un nuevo Vi sino que abriremos el ya
existente mediante el comando VI.. del menú Functíon y seleccionaremos la variable
en concreto a través del comando Select ltem del menú pop-up. Además, este mismo
menú cuenta con otra opción que nos permite utilizar una variable ya creada para leer
datos o para almacenarlos: Se trata del comando Change To Read Global o Change
To Wríte GlobaL
ATTRIBUTE NODE
Los attribute nodes o nodos de atributos se pueden considerar como variables
que dependen únicamente del terminal a partir del cual se han creado y que permiten
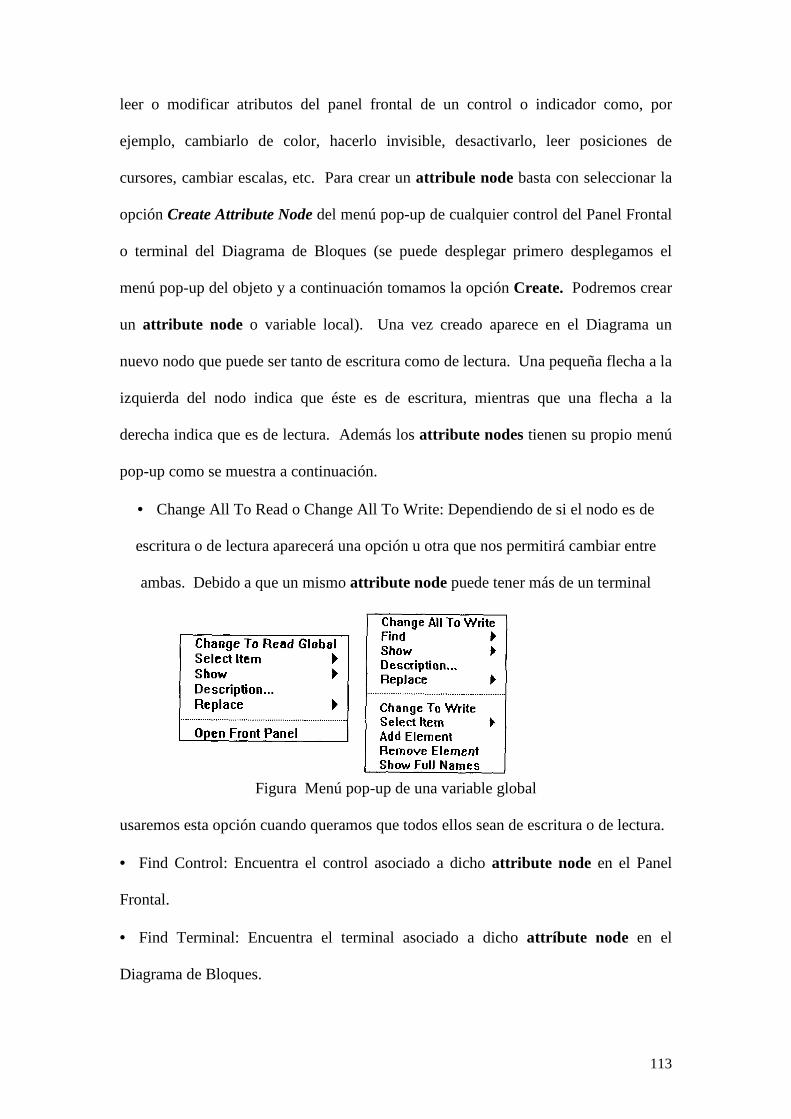
113
leer o modificar atributos del panel frontal de un control o indicador como, por
ejemplo, cambiarlo de color, hacerlo invisible, desactivarlo, leer posiciones de
cursores, cambiar escalas, etc. Para crear un attribule node basta con seleccionar la
opción Create Attribute Node del menú pop-up de cualquier control del Panel Frontal
o terminal del Diagrama de Bloques (se puede desplegar primero desplegamos el
menú pop-up del objeto y a continuación tomamos la opción Create. Podremos crear
un attribute node o variable local). Una vez creado aparece en el Diagrama un
nuevo nodo que puede ser tanto de escritura como de lectura. Una pequeña flecha a la
izquierda del nodo indica que éste es de escritura, mientras que una flecha a la
derecha indica que es de lectura. Además los attribute nodes tienen su propio menú
pop-up como se muestra a continuación.
• Change All To Read o Change All To Write: Dependiendo de si el nodo es de
escritura o de lectura aparecerá una opción u otra que nos permitirá cambiar entre
ambas. Debido a que un mismo attribute node puede tener más de un terminal
Figura Menú pop-up de una variable global
usaremos esta opción cuando queramos que todos ellos sean de escritura o de lectura.
• Find Control: Encuentra el control asociado a dicho attribute node en el Panel
Frontal.
• Find Terminal: Encuentra el terminal asociado a dicho attríbute node en el
Diagrama de Bloques.

114
• Find Attribute Nodes: Muestra todos los attribute nodes existentes en el
Diagrama y que están asociados a dicho control.
• Show Label: Oculta o visualiza la etiqueta identificativa del atribuye node.
• Description: Permite añadir comentarios.
• Replace: Sustituye el attribute node por cualquier otra función.
• Change To Read o Change To Write: Cambia a modo de escritura o de lectura
únicamente el terminal seleccionado dejando los demás tal y como estaban.
• Select ltem: Visualiza todos los atributos disponibles para el control asociado al
attribute node y permite cambiar un atributo por otro diferente. Podemos acceder
directamente a esta opción colocándonos encima del atributo que deseamos cambiar y
pulsando el botón izquierdo del ratón.
Por ejemplo, los atributos para un control numérico son:
Y para un string :
Remove Element.- Borra el terminal seleccionado.
Add Element. Añade un nuevo terminal.

115
Algunos controles como los graph tienen un gran número de atributos. Muchos
de estos atributos se agrupan en categorías, como es el caso de Y Scale rifo para un
indicador XY Graph. Una pequeña flecha a la derecha del atributo nos indica que se
trata de una categoría.
Se pueden seleccionar todos los atributos de una categoría de una sola vez
mediante el comando All elements (todos los elementos), aunque también podemos
seleccionarlos individualmente escogiendo el atributo específico.
INDICADORES GRAFICOS
En muchas ocasiones es necesario para una mayor comprensión de los
resultados obtenidos representarlos gráficamente. Para ello LabVIEW dispone de
cinco tipos de gráficos accesibles desde el menú Controls de¡ panel Frontal bajo e
ítem Graph, divididos en dos grupos: Los indícadores charl y los indicadores graph.
Un indicador graph o indicador gráfico es una representación bídimensional
dE una o mas gráficas. El graph recibe los datos como un bloque. Un indicador

116
chartc de trazos también muestra gráficas, pero éste recibe los datos y los muestra
puntc por punto o array por array, reteniendo un cierto número de puntos en pantalla
mediante un buffer disponible para ello.
4.2.6.3 INDICADORES CHART Se encuentran los siguientes.
WAVEFORM CHART
Waveform chart es un tipo especial de indicador numérico que muestra una o
mas gráficas, reteniendo en pantalla un cierto número de datos definido por nosotros
mismos. Los nuevos datos se añaden al lado de los ya existentes, de forma que se
pueden comparar entre ellos.
Los datos se pueden pasar uno a uno al chart o mediante arrays,
Evidentemente es mucho conveniente pasar múltiples puntos a la vez ya que de esta
manera sólo es necesario redibujar la gráfica una vez y no una por cada punto (figura
).
Es posible dibujar varias gráficas en un mismo chart, uniendo los datos de
cada gráfica en un cluster de escalares numéricos de forma que cada escalar que
contiene el cluster se considera como un punto de cada una de las gráficas para una
misma abcisa. Se puede ahorrar tiempo uniendo los clusters en arrays y después
pasando todo el array a la gráfica.

117
Desplegando el menú pop-up se tiene acceso a las siguientes opciones:
• Change to Control o Change to Indicator: Dependiendo de si la waveforrn es
un control o un indicador nos permitirá cambiar entre ellas.
• Find Terminal: Muestra el terminal asociado en el Diagrama de bloques.
• Show Label: Permite poner una etiqueta de identificación a la waveform chart y,
si ya existe, la visualiza.
• Show Legend: Permite poner una etiqueta de identificación a cada una de las
gráficas.

118
• Show Palette: Activa una paleta que permite hacer zooms, desplazar la gráfica
de forma rápida, ajustar automáticamente la escala de los ejes, cambiar el formato y la
precisión de los indicadores numéricos y elegir entre escala lineal o logarítmica.
• Show Digital Display: Es un indicador que muestra el último valor que se ha
cargado en pantalla. Hay un indicador por cada gráfica.
• Show Scrolibar: Permite ver los valores anteriores contenidos en el buffer.
• Show X Scale: Visualiza la escala del eje de abcisas.
• Show Y Scale: Visualiza la escala del eje de ordenadas.
• Reinitialize to Default: Actualiza el último punto obtenido al valor por
defecto.
• Make Current Value Default: Convierte el último punto obtenido en el valor
por defecto.
• Description: Permite añadir comentarios.
• Clear Chart: Borra el contenido del buffer.
• AutoScale X: Ajusta de forma automática el rango de valores de X para una
correcta visualización.
• AutoScale Y: Ajusta de forma automática el rango de valores de Y para una
correcta visualización.
• Update Mode: Permite escoger entre tres modos de visualizar los nuevosstrip
chart, scope chart y sweep chart. El modo strip chart es el modo por defecto y
consiste en que cada nuevo valor se coloca a la derecha del display, mientras que
valores anteriores se desplazan hacia la izquierda. En el modo scope chart cada nuevo
valor se coloca a la derecha del anterior, empezando por el margen izquierdo del
display. Cuando se llega al margen derecho se borra todo el display y se comienza de
nuevo desde la izquierda. El modo scope chart es mucho más rápido que el modo

119
strip chart ya que no es necesario realizar todo el proceso de desplazar la pantalla
hacia la izquierda para cada nuevo punto. El modo sweep chart actúa como el modo
scope chart, alvo que ahora cuando se llega al final de la pantalla, ésta no se borra y se
S comienza de nuevo desde el principio, donde una línea vertical se mueve hacia la
derecha cada vez que se añade un nuevo punto.
• Create Attribute Node: Crea un nodo asociado al terminal del que procede en el
Diagrama de Bloques.
• Replace: Permite sustituir la waveform chart por cualquiera de los controles e
indicadores del Panel Frontal.
• X Scale and Y Scale: Permite escoger el estilo de la escala, tipo de rejilla, punto
inicial, incremento entre punto y punto, formato y precisión de estos puntos.
• Transpose Array: Cuando se representa más de una gráfica en una misma chart
utilizando arrays, waveform chart interpreta por defecto las filas como gráficas
diferentes. Pero si a nosotros nos interesa que sean las columnas las gráficas
diferentes, utilizaremos este comando para convertir las columnas en filas.
• Stack Plots: Normalmente cuando se representan más de una gráfica todas ellas
se sitúan en un mismo display. Pero puede ocurrir que las escalas de las ordenadas
sean muy diferentes entre ellas o que simplemente nos interese representarlas por
separado, cada una en un display. Para conseguir esto activaremos el comando Stack
Plot de forma que cada gráfica aparecerá con su propia escala y su propio display.
Cuando Stack Plots está activado, en su lugar aparece el comando Overlay Plot que es
el que dibuja todas las gráficas en un mismo display.
Chart History Length: Mediante este control podemos fijar el número de
puntos que waveform chart almacenará en el buffer que, por defecto, serán 1024.

120
INTENSITY CHART
Mediante íntensíty chart podemos mostrar datos tridimensionales colocando
bloques de colores sobre planos cartesianos. Para ello crearemos arrays
bidimensionales de números donde los índices de un elemento corresponderán a las
coordenadas X e Y, y el contenido a la coordenada Z, que tendrá asociado un color
para cada posible valor. Previamente será necesario definir la escala de colores que
vamos a utilizar a través de los atribuye nodes mediante el ítem Z Scale lnfo: Color
Array o Color Table, o a través de la rampa de colores visualizada junto a la gráfica.
Figura 4.5 Indicador intensity chart
Evidentemente, la escala de colores que podamos visualizar dependerá de la
resolución de nuestro monitor.
121
Cada vez que se envíe un nuevo conjunto de datos, estos aparecerán
representados a la derecha de los ya existentes. Intensíty chart soporta los tres modos
de visualización de waveform charl y también dispone de un buffer cuyo tamaño es,
por defecto, de 128 puntos. Las opciones disponibles para íntensity chart son
prácticamente las mismas que para waveform chari. únicamente, debido a que existe
una nueva coordenada, aparecen en el menú opciones para ésta, como son:
• Show Ramp: Visualiza u oculta la rampa de colores.
• Show Color Array: Permite fijar los colores de la rampa.
• Show Z Scale: Visualiza u oculta la escala z.
• AutoScale Z: Ajusta de forma automática el rango de valores de z a la escala de
colores.
• Z scale: Permite escoger el estilo de la escala, tipo de rejilla, punto inicial,
incremento entre punto y punto, formato y precisión de estos puntos.
4.2.6.4 INDICADORES GRAPH Se encuentran los siguientes.
WAVEFORM GRAPH
Waveform graph representa una serie de valores Y equiespaciados dada siempre
una distancia delta de X (ÁX) comenzando a partir de un valor inicial Xo. A un
mismo punto X, sólo le puede corresponder un valor de Y,. Cuando se representa una
nueva serie de datos, al contrario de lo que ocurría en los indicadores chart, estos
datos reemplazan a los ya existentes en lugar de añadirse al lado, y pierden los valores
representados con anterioridad.
Existen dos posibilidades a la hora de representar una única gráfica en una
waveform graph. La primera consiste en unir un array de valores numéricos

122
directamente a la graph de forma que ésta interpreta cada valor como un nuevo punto
comenzando en X=0 e incrementando X en 1 para cada punto.
La segunda consiste en crear un cluster en,.el cual, junto con el array de
valores, se indica el valor inicial Xo y el incremento AX.
Figura 4.6 Representación de una sola gráfica
Existe la posibilidad de representar más de un gráfica en una misma waveform
graph. Para ello es necesario unir los datos de las diferentes gráficas en un formato
que LabVIEW sepa interpretar. Utilizar un formato u otro vendrá determinado
principalmente por las características de las gráficas a mostrar. Así, si todas las
gráficas tienen un mismo escalado X y un mismo número de puntos, bastará con crear
un array bidimensional de valores numéricos donde cada fila de datos es una únicá
gráfica. LabVIEW interpretará estos datos como puntos en la gráfica comenzando en
X=0 e incrementándola en 1. Si nos interesa cambiar el punto inicial o el incremento
de x, crearemos un cluster que contendrá el array bidimensional y los valores de xo y
Áx.

123
Figura 4.7 Representación de múltiples gráficas con el mismo número de puntos
Mediante el comando Transpose Array del menú pop-up podemos hacer que
LabVIEW interprete las columnas como gráficas diferentes en lugar de las filas.
Puede ocurrir que el número de elementos de cada gráfica sea diferente. En
ese caso es necesario crear un cluster para cada array de datos y después unir todos los
clusters en un array. Esto es necesario debido a que LabVIEW no permite crear
arrays de arrays. Al igual que anteriormente si nos interesa que el punto inicial sea
diferente de cero o que el incremento sea diferente de 1, crearemos un cluster que
contenga el array de clusters de array y los nuevos valores de Xo y ÁX.
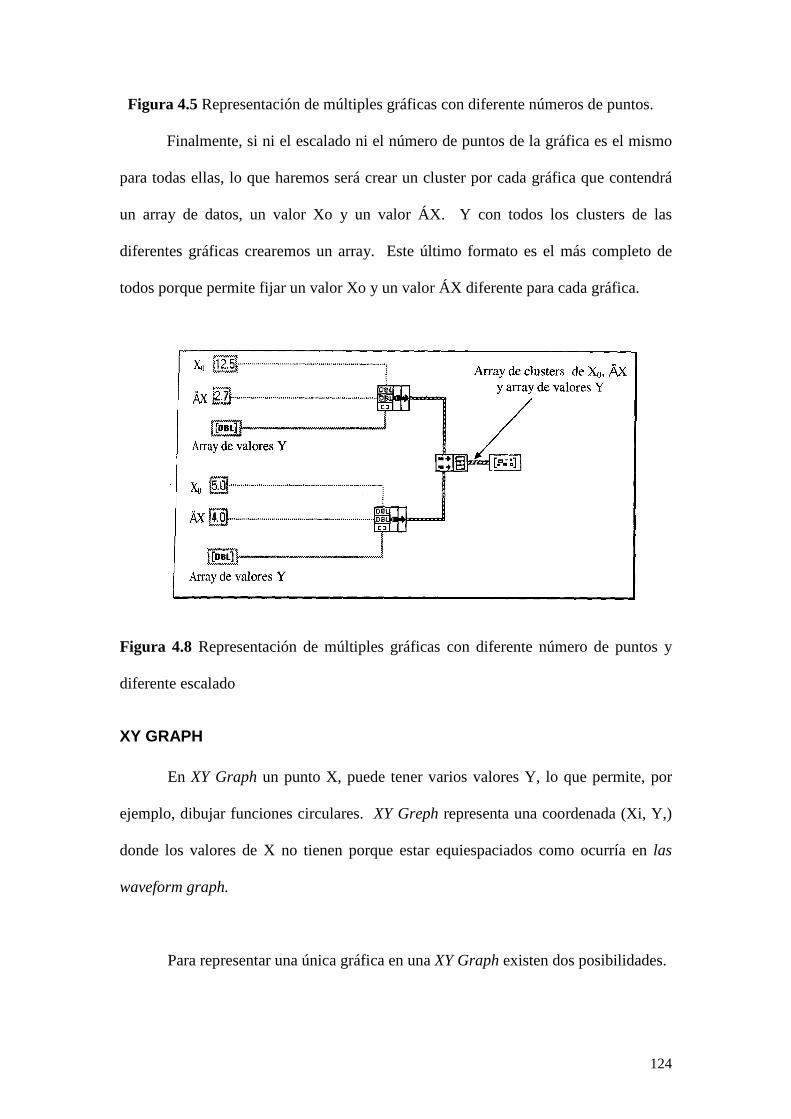
124
Figura 4.5 Representación de múltiples gráficas con diferente números de puntos.
Finalmente, si ni el escalado ni el número de puntos de la gráfica es el mismo
para todas ellas, lo que haremos será crear un cluster por cada gráfica que contendrá
un array de datos, un valor Xo y un valor ÁX. Y con todos los clusters de las
diferentes gráficas crearemos un array. Este último formato es el más completo de
todos porque permite fijar un valor Xo y un valor ÁX diferente para cada gráfica.
Figura 4.8 Representación de múltiples gráficas con diferente número de puntos y
diferente escalado
XY GRAPH
En XY Graph un punto X, puede tener varios valores Y, lo que permite, por
ejemplo, dibujar funciones circulares. XY Greph representa una coordenada (Xi, Y,)
donde los valores de X no tienen porque estar equiespaciados como ocurría en las
waveform graph.
Para representar una única gráfica en una XY Graph existen dos posibilidades.

125
La primera consiste en crear un cluster que contenga un array de datos X y un
array de datos Y. La segunda consiste en crear un array de clusters, donde cada cluster
contiene un valor de X y un valor de Y.
Figura 4.9 Posibles representaciones de una única XY Graph
Al igual que en las waveform graph existe la posibilidad de representar más de
una gráfica en una misma XY Graph (figura ). Pero, en este caso, tan sólo existen dos
formatos posibles derivados de los dos formatos vistos anteriormente para una única
gráfica. El primer formato es un array de gráficas, donde cada gráfica es un cluster de
un array X y un array Y. Y el segundo formato es un array de clusters de gráficas,
donde cada gráfica es, a su vez, otro array de clusters conteniendo un valor X y un
valor Y.
INTENSITY GRAPH
Intensíty graph es exactamente igual que íntensity chart salvo que intensity
graph no retiene valores anteriores, por lo que cuando un nuevo bloque de valores se
carga, éstos sustituyen a los ya existentes.

126
Los comandos disponibles en los menús pop-up de los indicadores graph
tienen las mismas utilidades que los descritos en los indicadores chart, por lo que no
se han mencionado en este apartado. Solamente existe una diferencia importante y es
que los indicadores graph disponen de cursores que nos permiten movernos por la
gráfica.
Figura 4.10 Posibles representaciones de múltiples XY Graph
GRAPH DURSORS
La paleta de cursores está disponible desde la opción Show Cursor Display del menú
pop-up (figura 4.9 ).
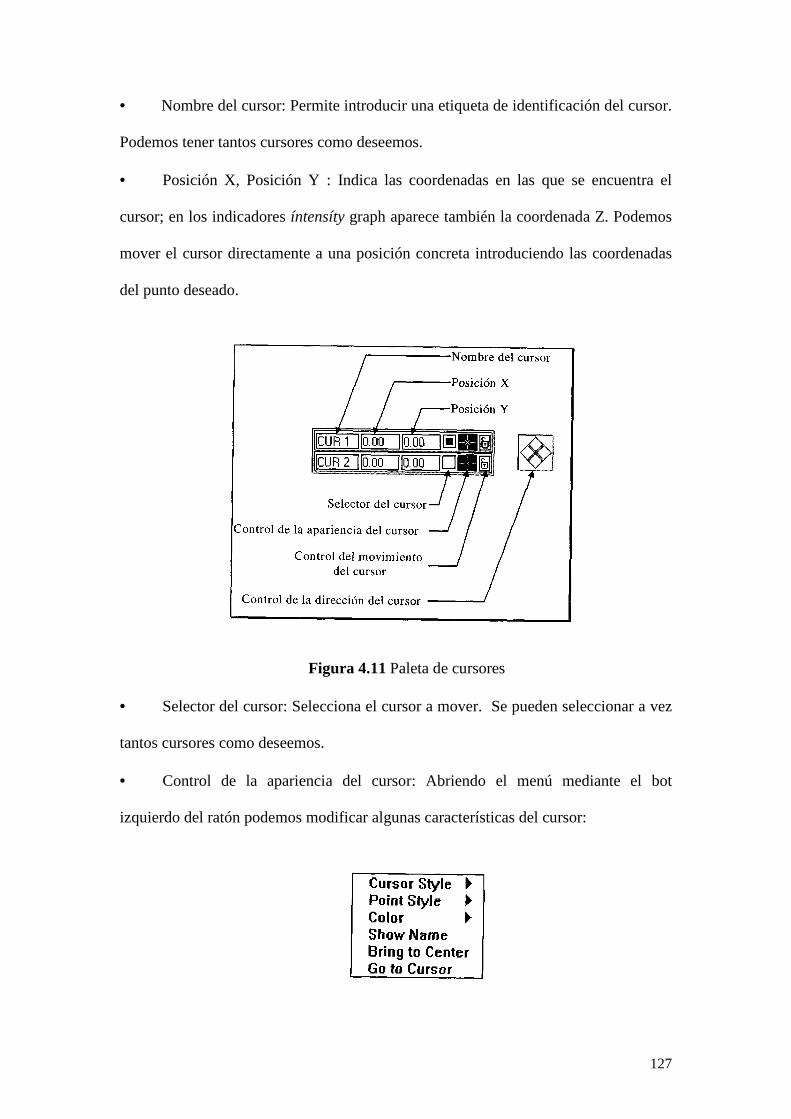
127
• Nombre del cursor: Permite introducir una etiqueta de identificación del cursor.
Podemos tener tantos cursores como deseemos.
• Posición X, Posición Y : Indica las coordenadas en las que se encuentra el
cursor; en los indicadores íntensíty graph aparece también la coordenada Z. Podemos
mover el cursor directamente a una posición concreta introduciendo las coordenadas
del punto deseado.
Figura 4.11 Paleta de cursores
• Selector del cursor: Selecciona el cursor a mover. Se pueden seleccionar a vez
tantos cursores como deseemos.
• Control de la apariencia del cursor: Abriendo el menú mediante el bot
izquierdo del ratón podemos modificar algunas características del cursor:
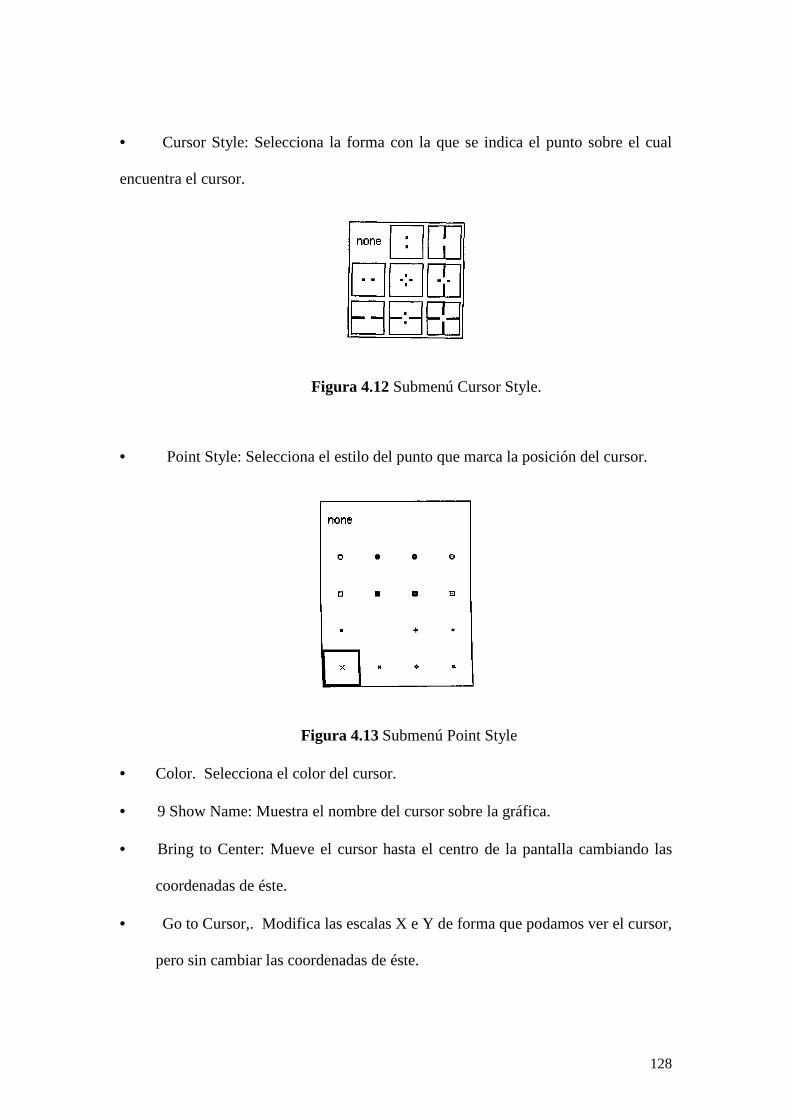
128
• Cursor Style: Selecciona la forma con la que se indica el punto sobre el cual
encuentra el cursor.
Figura 4.12 Submenú Cursor Style.
• Point Style: Selecciona el estilo del punto que marca la posición del cursor.
Figura 4.13 Submenú Point Style
• Color. Selecciona el color del cursor.
• 9 Show Name: Muestra el nombre del cursor sobre la gráfica.
• Bring to Center: Mueve el cursor hasta el centro de la pantalla cambiando las
coordenadas de éste.
• Go to Cursor,. Modifica las escalas X e Y de forma que podamos ver el cursor,
pero sin cambiar las coordenadas de éste.

129
• Control del movimiento del cursor: El candado cerrado indica que el cursor se
moverá siguiendo la gráfica (opciones Lock to plot y Snap to point), mientras que el
candado abierto indica que el cursor se moverá libremente (opción Free). Si hubiese
más de una gráfica el menú nos permitirá escoger sobre cual de ellas queremos que se
mueva el cursor. El comando Allow Drag, cuando está activo, permite desplazar la
gráfica directamente con el puntero del ratón.
Control de la dirección del cursor: Mueve los cursores seleccionados punto por
punto en la dirección indicada.
4.3 CONFIGURACION DEL PUERTO LPT1 A LA TARJETA
DAQ
Para el presente trabajo es necesario configurar las salidas y entradas del
puerto paralelo el cual como se analizo anteriormente tiene 3 registros los cuales serán
configurados de la siguiente manera:
• El registro 378Hex que contiene 8 bits de salida será empleado como líneas de
salida de datos para propósito general las cuales en primera instancia serán líneas para
el control del ADC 0808 en la selección del canal analógico a digitalizar (A y B del
0808) el pulso de inicio de digitalización (Start y Ale del 0808) y finalmente
separación de bits MSB y LSB en grupos de 4 bits cada uno para entrada de datos por
el registro 379Hex. En segunda instancia estos 8 bits de salida serán utilizados para
activación de 4 reles de 24Vdc (Out relé) y 4 salidas d voltaje cada una de 24Vdc
130
(Digital Out).Para lograr este propósito es necesario separar las líneas del bus común
que se esta empleando del registro 378Hex esto se consigue mediante circuitos
74LS244 que son compuertas de tres estados (“1” lógico , “0” lógico y alta
impedancia). Adicionalmente para las salidas a rele y voltaje es necesario memorizar
los datos puesto que en un instante están controlando el ADC y luego provocando
activación de salidas que puede producir conflictos o descoordinación en el control
entonces es necesario utilizar circuitos 74LS373 (Tipo Latch ) para grabar los datos
de salida en especial los de activación de relés y voltaje.
• El registro 379Hex contiene 8 bits de entrada de datos pero solo 5 líneas
disponibles de las cuales serán empleadas los bits 3,4,5 y 7 para entrada de datos de
propósito general que en primera instancia ingresaran los bits del ADC 0808 en
grupos de 4 bits cada uno (LSB y MSB) que son separados por el bit # 3 del registro
378Hex que se explico anteriormente el cual controla un circuito 74LS244 (tres
estados) . En segunda instancia serán empleadas estas líneas para ingresar datos
digitales de 24Vdc exteriores , esto se consigue utilizando otro circuito 74LS244 el
cual es controlado por el bit # 2 del registro 37A Hex . El bit # 6 de este registro
379Hex se lo utiliza con la línea EOC del ADC 0808 (EOC=Fin de conversión) para
indicar al programa (Software LabView) que se a terminado la digitalización del canal
asignado y que se puede proceder a leer los adtos presentes en el registro 379Hex.
• El registro 37A Hex es un registro bidireccional (IN/OUT) que para nuestra
tarjeta se lo utilizara solo como salida (OUT) y se empleara 3 bits de los 4 disponibles
para líneas de control . El bit # 0 cumple la función de separar los datos de salida del
bus común 378Hex como se explico anteriormente en control del ADC 0808 y salidas
a relé / voltaje mediante controlar 2 circuitos 74LS244 como se indica en la figura a
continuación .
131
El bit # 1 sirve para guardar o memorizar los datos de salida a rele y voltaje
del 378Hex , esto se logra mediante producir un pulso en la línea Latch del circuito
74LS373 . El bit # 2 se emplea en la separación de lineas de los datos del ADC (bits
LSB /MSB) y los datos exteriores (Digital In 24Vdc) mediante un circuito 74LS244
(tres estados).
En la figura siguiente a mas de mostrar la configuración del puerto paralelo
LPT1 y su distribución o asignación de pines se indican también las fuentes de
alimentación que se emplean que son de +5Vdc , +12 Vdc , -12Vdc , +24 Vdc y de la
red 110VAC , tambien se muestra la asignación de pines del ADC 0808 ,el reloj
(CLK) que esta formado por el circuito 555 y demás elementos para producir un
frecuencia de 500 KHz , compuertas 74LS14 que son inversores smith trigger que
sirven para generar formas de onda cuadradas con un mínimo de transición de alto a
bajo y viceversa como es en el caso del CLK y para el control de los circuitos
74LS244, también se observan circuitos opto acopladores 3041 que nos sirven para
proteger a la PC de voltajes superiores a los 5Vdc puesto que proveen aislamiento de
7000 voltios , y finalmente se observa el acondicionamiento de las senales analógicas
(SCXI = Signal Conditioning eXtensions for Instrumentation) para el sensor de
temperatura LM335 , utilizando para ello circuitos LM 741 que son amplificadores
operacionales en varias configuraciones como seguidores de tensión , restadores ,
inversores , conversores de corriente a voltaje , este acondicionamiento es necesario
puesto que el sensor de temperatura LM335 tiene una función de trasferencia de
10mV por grado Kelvin es decir a una temperatura de 0° grados Celsius se tendra un
voltaje de 2.73Vdc. y a una temperatura de 100° grados Celsius el voltaje será de

132
3.73Vdc.Esto se logra convirtiendo los grados Celsius a grados kelvin mediante la
ecuación:
°K = 273 + °C
Entonces si °C = 0 grados.
La temperatura kelvin es: °K = 273 grados.
Y el voltaje generado en el sensor LM 335 sera : Vs = 273 ° K*(10mV / °K)
Vs = 2.73 Vcd.
Si °C = 100 grados
La temperatura kelvin será : °K = 273 + 100 , °K = 373 grados.
Y el voltaje generado es Vs = 373°K * (10mV / °K) , Vs = 3.73Vdc.
El procedimiento es similar para cualquier temperatura en grados Celsius para
generar el voltaje en el sensor. NOTA (VER EN ANEXOS).
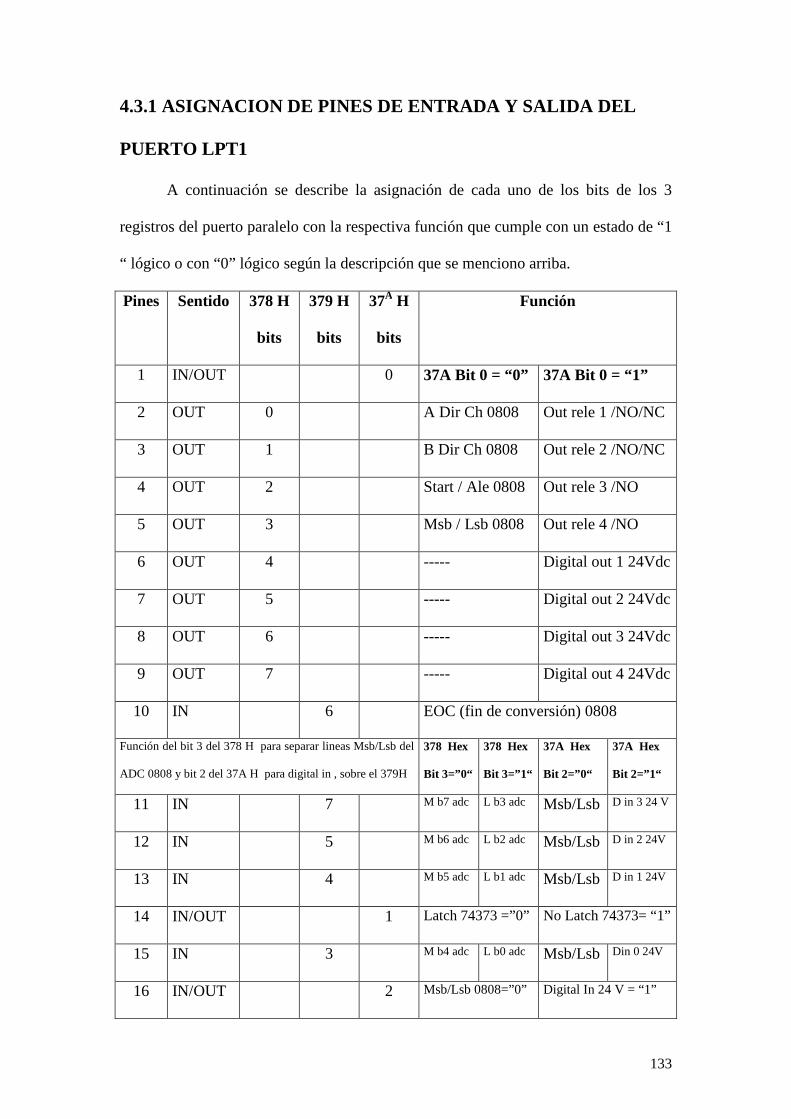
133
4.3.1 ASIGNACION DE PINES DE ENTRADA Y SALIDA DEL
PUERTO LPT1
A continuación se describe la asignación de cada uno de los bits de los 3
registros del puerto paralelo con la respectiva función que cumple con un estado de “1
“ lógico o con “0” lógico según la descripción que se menciono arriba.
Pines Sentido 378 H
bits
379 H
bits
37A H
bits
Función
1 IN/OUT 0 37A Bit 0 = “0” 37A Bit 0 = “1”
2 OUT 0 A Dir Ch 0808 Out rele 1 /NO/NC
3 OUT 1 B Dir Ch 0808 Out rele 2 /NO/NC
4 OUT 2 Start / Ale 0808 Out rele 3 /NO
5 OUT 3 Msb / Lsb 0808 Out rele 4 /NO
6 OUT 4 ----- Digital out 1 24Vdc
7 OUT 5 ----- Digital out 2 24Vdc
8 OUT 6 ----- Digital out 3 24Vdc
9 OUT 7 ----- Digital out 4 24Vdc
10 IN 6 EOC (fin de conversión) 0808
Función del bit 3 del 378 H para separar lineas Msb/Lsb del
ADC 0808 y bit 2 del 37A H para digital in , sobre el 379H
378 Hex
Bit 3=”0“
378 Hex
Bit 3=”1“
37A Hex
Bit 2=”0“
37A Hex
Bit 2=”1“
11 IN 7 M b7 adc L b3 adc Msb/Lsb D in 3 24 V
12 IN 5 M b6 adc L b2 adc Msb/Lsb D in 2 24V
13 IN 4 M b5 adc L b1 adc Msb/Lsb D in 1 24V
14 IN/OUT 1 Latch 74373 =”0” No Latch 74373= “1”
15 IN 3 M b4 adc L b0 adc Msb/Lsb Din 0 24V
16 IN/OUT 2 Msb/Lsb 0808=”0” Digital In 24 V = “1”

134
17 IN/OUT 3 ------ ------
18-25 GND Referencia Referencia
135
CAPITULO V
IMPLEMENTACION DE LA COMUNICACION
TARJETA DAQ CON EL COMPUTADOR
Para ello analizaremos.
5.1 DISENO DEL SOFTWARE DE APLICACIÓN CON LA
TARJETA DAQ
Luego de haber asignado los pines del puerto LPT 1 con la función respectiva
que deben desempeñar cada uno y el momento (secuencia) y tiempo (duración) en que
cada línea debe activarse o desactivarse se procede al diseño del programa bajo el
software LabView de Natinal Instruments que es una herramienta diseñada como se
ha explicado en capítulos anteriores para la instrumentación con el cual podemos
acondicionar y controlar señales sean analógicas o digitales , realizar cálculos ,
controlar periféricos externos como tarjetas I/O , enlaces DDE sea a través de tarjetas
Plug and Play , el puerto LPT1 , interfaces seriales como RS-232 , RS-485 todas estas
operando en tiempo real , resumiendo en una sola palabra se puede construir
instrumentos Virtuales con LabView es decir podemos hacer que la PC funciones o
efectué las mismas operaciones que un instrumento real solo que no es tangible ,
pudiendo realizar como por ejemplo osciloscopios , voltímetros , controles de
temperatura y cualquier variable (nivel, caudal, presión, velocidad, frecuencia, etc) y
mas complejo aún supervisar y controlar plantas (Procesos productivos de una
fabrica) enteras como control de motores , válvulas , análisis estadístico llamándose
esto último los sistemas SCADA (supervisión control y adquisición de datos).

136
A continuación se procede a describir la programación realizada para lo cual
es necesario recordar ciertas características que posee LabView y los datos que
maneja que ya fueron descritos en capítulos anteriores pero que son necesarios tener
en cuenta para comprender mejor el programa creado .
Entre las características tenemos:
• Programación totalmente gráfica (interconexión mediante iconos)
• Secuencial es decir ejecuta las operaciones condicionadas en orden jerarquico
y retorna nuevamente al inicio o donde sea requerido.
• Trabaja en tiempo real con variables dinámicas exteriores.
• Puede intercambiar datos con diferentes programas como Excel, Visual Basic
y otros a través de DDE (data dinamic exchange – intercambio dinamico de
datos).
Entre los datos que maneja tenemos:
• Boleanos (TRUE or FALSE) que son de color verde en LabView.
• Enteros (Integer) con signo (Signed) y sin signo (Unsigned) que son de color
azul que pueden ser representados en 8,16 o 32 bits
(I8,I16,I32,U8,U16,U32).Además pueden expresados en formato decimal (0-
9) hexadecimal (0-F) en octal (0-7) y binario( 0-1).
• De precisión extendida y doble precisión (EXT ,DBL) que son de color
tomate.
• Cadena de caracters tipo Ascii que son de color rosado.
• De tipo array (arreglo) colección de datos de un mismo tipo para manipulación
múltiple que son de color café.

137
• Controles e indicadores , siendo un control aquel elemento que en el momento
de correr el programa (RUN) puede el usuario manipular el valor y ser
cambiado cuantas veces se requiera este se diferencia del indicador porque
posee un contorno exterior mas visible o acentuado , mientras que el indicador
su contorno no es acentuado es mas delgado y este sirve solo para
visualización en modo RUN el usuario no puede manipular su valor,
solamente un control puede variar a un indicador.
Luego de esta explicación procedemos a describir la función de cada Sub VI
(progrmas locales o subrutinas del programa general).
5.1.1 DESCRIPCIÓN DEL PROGRAMA QUE CONTROLA AL
ADC 0808.
Puesto que el ADC 0808 requiere de una secuencia lógica para su
funcionamiento y la activación de ciertas líneas en un instante y en otro instante
provoca la salida de datos ya digitalizados del canal seleccionado que igual requieren
manipulación se creo el programa siguiente.
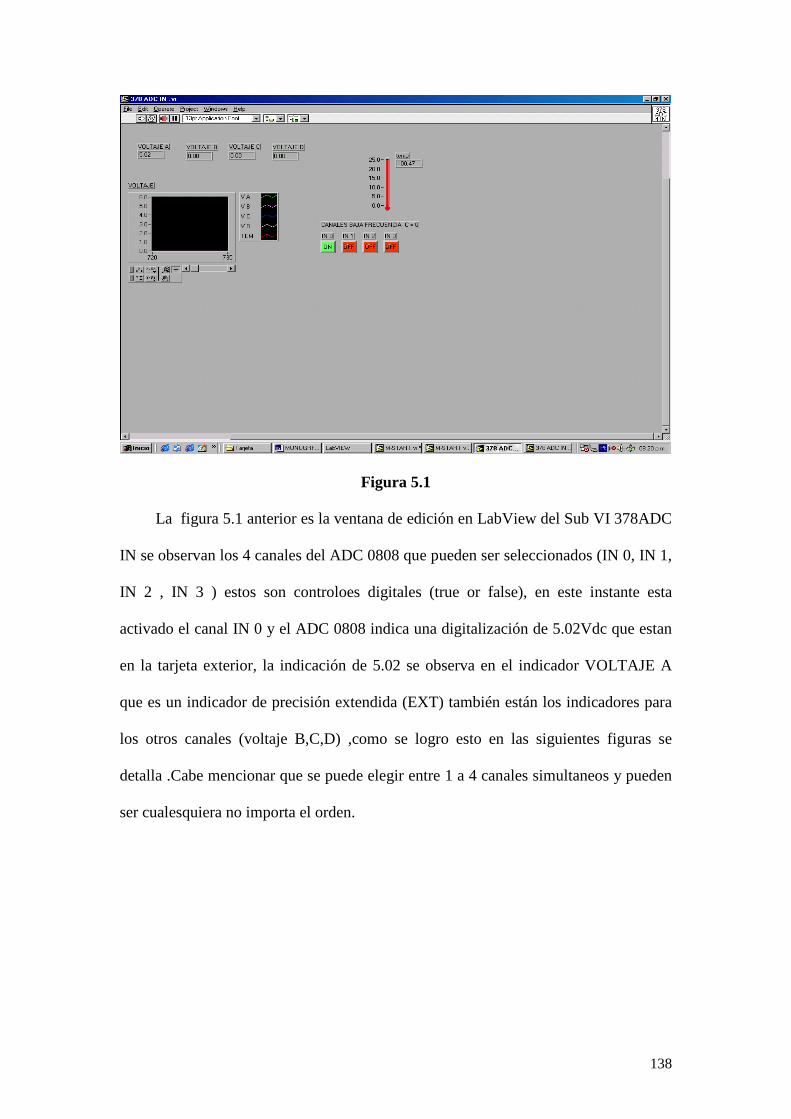
138
Figura 5.1
La figura 5.1 anterior es la ventana de edición en LabView del Sub VI 378ADC
IN se observan los 4 canales del ADC 0808 que pueden ser seleccionados (IN 0, IN 1,
IN 2 , IN 3 ) estos son controloes digitales (true or false), en este instante esta
activado el canal IN 0 y el ADC 0808 indica una digitalización de 5.02Vdc que estan
en la tarjeta exterior, la indicación de 5.02 se observa en el indicador VOLTAJE A
que es un indicador de precisión extendida (EXT) también están los indicadores para
los otros canales (voltaje B,C,D) ,como se logro esto en las siguientes figuras se
detalla .Cabe mencionar que se puede elegir entre 1 a 4 canales simultaneos y pueden
ser cualesquiera no importa el orden.

139
Figura 5.2
La figura 5.2 es la ventana de programación en LabView del SubVI anterior
(378ADC IN) se observa los 4 canales de indicación en color tomate Voltaje A, B, C,
D que son variables locales (extenciones de la variable principal) de escritura (Local
Varible Write) que en este caso estan funcionando como controles (borde externo mas
acentuado) a diferencia del indicador “Temp.” (borde externo no acentuado) mas
adelante se indican las variables principales de voltaje A, B, C, D y se observara que
son indicadores .Temp es el resultado de multiplicar Voltaje A por 20 como se
observa.Voltaje es un array (color café) que en la pantalla de edición es una sub
pantalla (waveform Chart) que grafica las 4 variables de precisión extendida voltaje
A, B, C ,D . Tambien se observa una sentencia de secuencia que posee 5 pasos a
ejecutar (0[0---4]) ,se encuentra ejecutando el paso # [ 0 ] dentro del cual se observa
el Sub VI Out Port el cual es llamado para ejecutar la escritura en el puerto LPT 1 en
este caso el registro (puerto) que se emplea es el 37A HEX y el dato que se esta
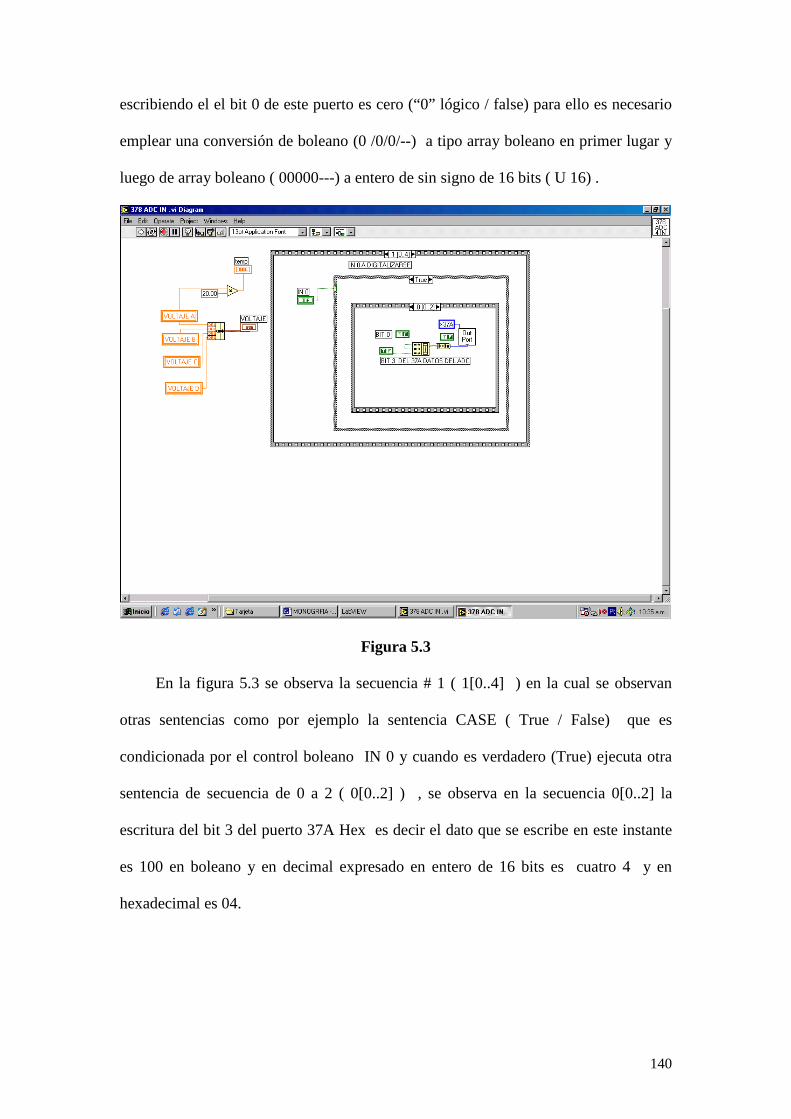
140
escribiendo el el bit 0 de este puerto es cero (“0” lógico / false) para ello es necesario
emplear una conversión de boleano (0 /0/0/--) a tipo array boleano en primer lugar y
luego de array boleano ( 00000---) a entero de sin signo de 16 bits ( U 16) .
Figura 5.3
En la figura 5.3 se observa la secuencia # 1 ( 1[0..4] ) en la cual se observan
otras sentencias como por ejemplo la sentencia CASE ( True / False) que es
condicionada por el control boleano IN 0 y cuando es verdadero (True) ejecuta otra
sentencia de secuencia de 0 a 2 ( 0[0..2] ) , se observa en la secuencia 0[0..2] la
escritura del bit 3 del puerto 37A Hex es decir el dato que se escribe en este instante
es 100 en boleano y en decimal expresado en entero de 16 bits es cuatro 4 y en
hexadecimal es 04.
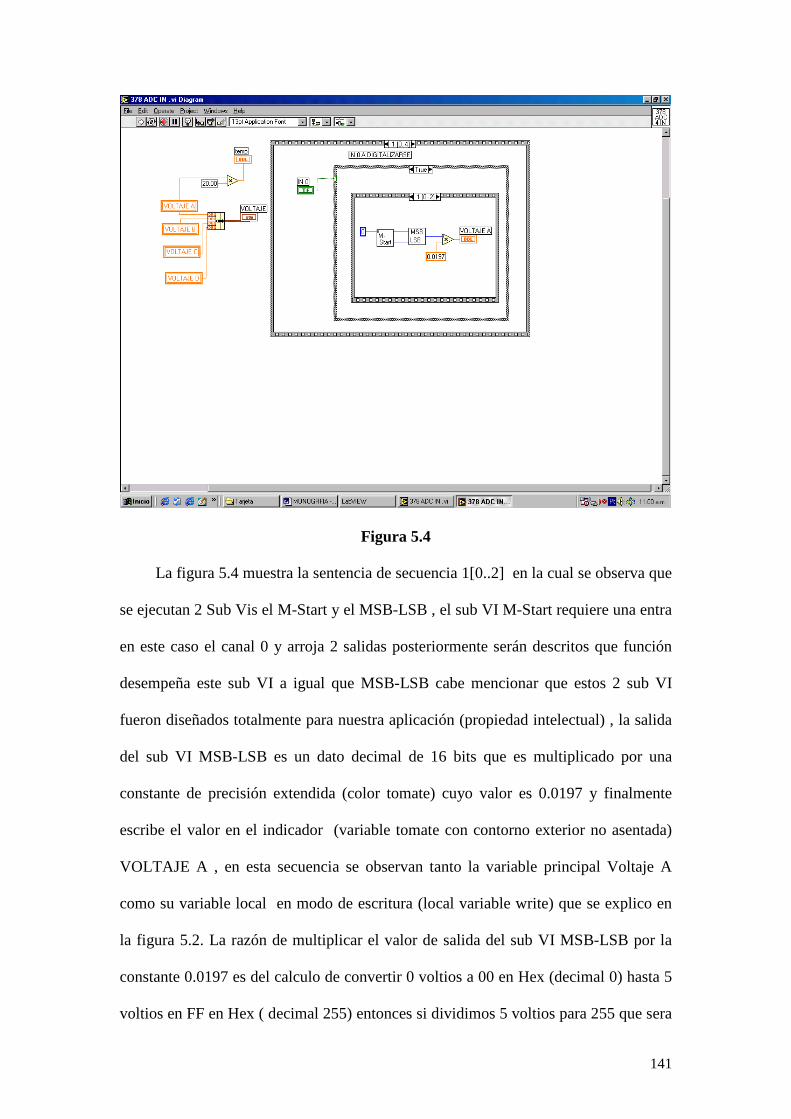
141
Figura 5.4
La figura 5.4 muestra la sentencia de secuencia 1[0..2] en la cual se observa que
se ejecutan 2 Sub Vis el M-Start y el MSB-LSB , el sub VI M-Start requiere una entra
en este caso el canal 0 y arroja 2 salidas posteriormente serán descritos que función
desempeña este sub VI a igual que MSB-LSB cabe mencionar que estos 2 sub VI
fueron diseñados totalmente para nuestra aplicación (propiedad intelectual) , la salida
del sub VI MSB-LSB es un dato decimal de 16 bits que es multiplicado por una
constante de precisión extendida (color tomate) cuyo valor es 0.0197 y finalmente
escribe el valor en el indicador (variable tomate con contorno exterior no asentada)
VOLTAJE A , en esta secuencia se observan tanto la variable principal Voltaje A
como su variable local en modo de escritura (local variable write) que se explico en
la figura 5.2. La razón de multiplicar el valor de salida del sub VI MSB-LSB por la
constante 0.0197 es del calculo de convertir 0 voltios a 00 en Hex (decimal 0) hasta 5
voltios en FF en Hex ( decimal 255) entonces si dividimos 5 voltios para 255 que sera
142
el valor máximo que arroja el ADC 0808 (1111 1111) al digitalizar los 5 voltios que
es hex es FF y decimal es 255 se tiene un valor de 0.0197 es decir cada 19.7 mV
(miliVoltios) la salida del ADC varia en un BIT , por ejemplo si deseamos digitalizar
la temperatura ambiente con el sensor LM 335 el cual como se indico tiene una
función de 10mV / grado Kelvin y arroja un voltaje de 2.93 Vcd a 20 grados Celsius
la digitalización que arroja el ADC 0808 sera de 1001 0100 en boloeano en
hexadecimal es 94 Hex y en decimal llega a ser 148 todo esto arroja el ADC según su
resolución ,configuración y asignación de valores que se describieron en capítulos
anteriores , entonces luego de ejecutarse los sub VI y después de todas estas
transformaciones que estos efectúan el valor que se tiene de digitalización en decimal
fue de 148 para trasformar a la escala de voltaje (0 a 5Vdc) es necesario multiplicar
este valor por la constante 0.0197 y se tiene que es 2.9156 que aproximado es 2.92
VDC es decir hay una variación de 10 mv entre el valor real con el digitalizado en
LabView (diferencia casi insignificante) ,el mismo proceso es par cualquier valor de
temperatura a digitalizarse.
La figura 5.5 muestra la sentencia CASE en el estado de False igual es
condicionada por el control boleano IN 0 y en este caso tiene que escribir en el
indicador voltaje A un valor de 0 lo cual indica que no se esta empleando este canal
del ADC 0808 y no se ejecutaran ninguna sentencia ni cálculos como cuando el canal
es activo. Nótese que voltaje A es otra variable local ahora en modo lectura (local
variable read) que a diferencia de la variable local en modo write (escritura) tiene el
contorno externo no acentuado, pueden observarse las dos variables locales en este
instante .

143
Figura 5.5
Luego de esta descripción del canal In 0 , todos los demás canales In 1 ,In 2 ,In3
siguen los mismos pasos descritos en las otras secuencias es decir en la 2[0...4] se
ejecuta todo similar a lo descrito pero con las variables de controles e indicadores que
corresponden al canal In 1 (voltaje B ) , en la secuencia 3[0..4] se ejecuta todo con
IN2 y Voltaje C , en 4[0..4] todo lo que es con In 3 y voltaje D.
A continuación se describen las funciones que efectúan los sub VI M-Start y el
MSB-LSB que se indicaron anteriormente.
La figura 5.6 muestra el sub VI M START su pantalla de edición donde se
observa los bits de entrada del registro 379 Hex que se utilizan en este caso son el b7,
b5, b4, b3 el bit b6 es utilizado por la línea EOC del ADC 0808 y corresponde a IRQ
7 .
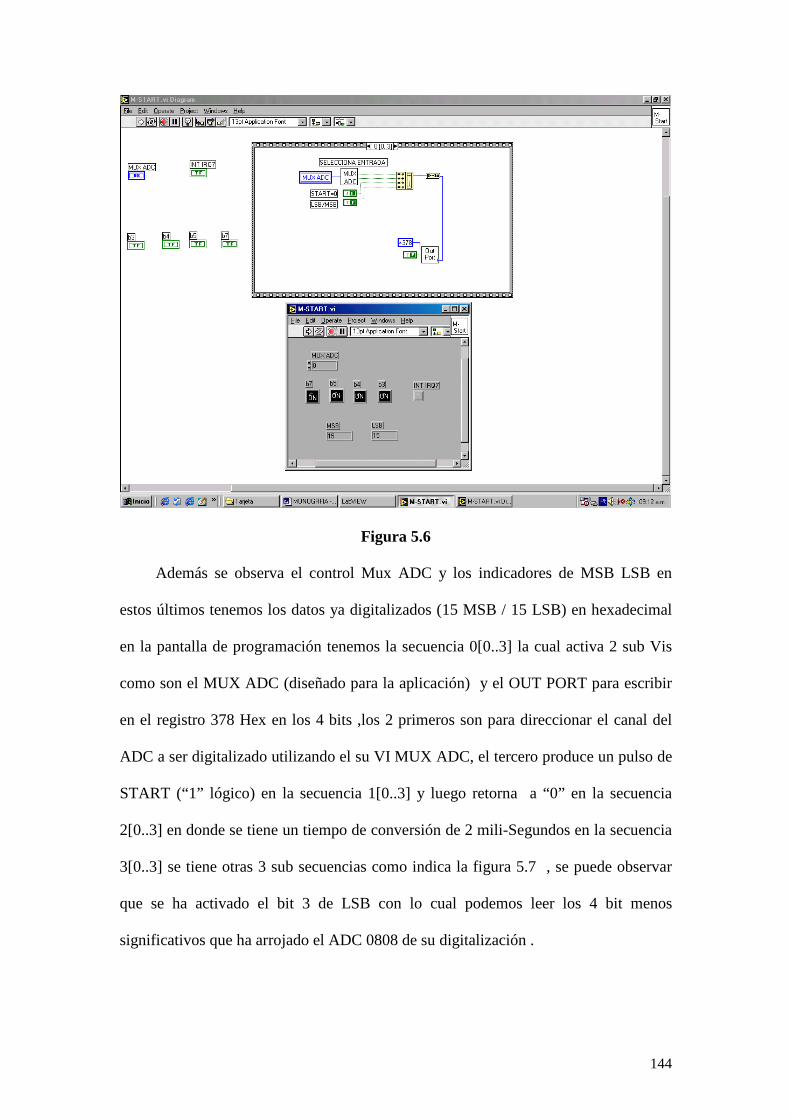
144
Figura 5.6
Además se observa el control Mux ADC y los indicadores de MSB LSB en
estos últimos tenemos los datos ya digitalizados (15 MSB / 15 LSB) en hexadecimal
en la pantalla de programación tenemos la secuencia 0[0..3] la cual activa 2 sub Vis
como son el MUX ADC (diseñado para la aplicación) y el OUT PORT para escribir
en el registro 378 Hex en los 4 bits ,los 2 primeros son para direccionar el canal del
ADC a ser digitalizado utilizando el su VI MUX ADC, el tercero produce un pulso de
START (“1” lógico) en la secuencia 1[0..3] y luego retorna a “0” en la secuencia
2[0..3] en donde se tiene un tiempo de conversión de 2 mili-Segundos en la secuencia
3[0..3] se tiene otras 3 sub secuencias como indica la figura 5.7 , se puede observar
que se ha activado el bit 3 de LSB con lo cual podemos leer los 4 bit menos
significativos que ha arrojado el ADC 0808 de su digitalización .

145
Figura 5.7
Luego en la siguiente secuencia 1[0..3] se observa la lectura del registro 379
Hex y algunas herramientas de programación que nos sirven para separar los bits que
necesitamos como son el b7, b5, b4, b3 y finalmente se tiene el valor en hexadecimal
en el indicador LSB como se muestra en la figura 5.8. Para leer los 4 siguientes bits
mas significativos se cambia a false el bit 4 del registro 378 Hex y el proceso es
similar al ya descrito.
146
Figura 5.8
5.2 CONEXIÓN DE LA TARJETA DAQ CON EL COMPUTADOR
Para realizar la conexión de la tarjeta que contiene el ADC 0808 y demás
elementos como reles de salida , voltajes de salida / entrada, y señales analógicas ,fue
necesario construir un cable de trasmisión paralela con conectores DB 25 en un
extremo tipo macho y en el otro extremo un tipo hembra similar al cable de impresora
,como se menciona con anterioridad es necesario la ayuda de circuitos auxiliares para
direccionamiento de líneas como son circuitos 74LS244 que son compuertas 3 state es
decir funcionan normalmente como las compuertas normales pueden producir estados
de “1” lógico , “0” lógico y adicionalmente poseen otra línea de control que provoca
un estado de alta impedancia es decir bloquea las salidas con una alta resistencia en el
orden de los Mega ohms con esto podemos unir salidas de varios 74LS244 y
construir un bus común como se tiene en esta aplicación en la salida de los datos MSB
/ LSB que arroja el ADC 0808 y al diseccionar las salidas del registro 378 Hex para

147
en un instante controlar al ADC y luego provocar las salidas de rele y voltaje. Toda la
circuiteria interna auxiliar funciona con 5 voltios , otros circuitos funcionan con 12
VDC y voltaje negativo de 12 voltios ,rels y fuentes de salida funcionan con 24 Vdc y
las entradas digitales son voltaje de 0 / 24 VDC. Tanto salidas como entradas están
protegidas contra voltajes superiores a los 5 Vdc que son los niveles con los que
trabaja el puerto paralelo para ello se emplea circuitos opto-acopladores 30 41 los
cuales son transistores que son activados por un haz de luz que emite un diodo LED el
aislamiento que producen son de 7000 voltios entonces la parte de potencia como
reles de estado sólido (SSRs solid state relay) y contactores que manejan señales altas
como 110 , 220 , 440Vac están completamente aislados y no existe el peligro de que
se introduzcan en la PC a través del puerto paralelo. El ADC 0808 sus entradas a
digitalizarse son de 5 Vdc es decir voltaje continuo y están protegidos por diodos
Zener de 5 VDC con lo cual se asegura que las señales no destruyan al ADC por
superar los 5 voltios . El oscilador que produce la señal de reloj ( CLK) para el ADC
0808 es un circuito LM555 en configuración de Astable ( Autodisparable por
retroalimentación) esto se consigue mediante resistencias de 120 ohmios y un
capacitor de 0.01uF (microfaradios 10 E-6) logrando con esto obtener una frecuencia
de 600 KHz que es ideal para la digitalización esto se consigue mediante la ecuación
que rige el funcionamiento del circuito astable que es:
T = Th + Tl (Periodo T = tiempo en alto Th + tiempo en bajo Tl)
Th = R * C * Ln 2 ( R resistencia , C capacitor , Ln logaritmo natural )
Th = 120 * (0.01 10 E –6) * Ln 2
Th = 0.831776 10 E-6 segundos = 0.831776 uS (micro-segundos)
T
Th Tl

148
CAPITULO VI
ANALISIS DE PRUEBAS Y RESULTADOS
Se lo realiza en.
6.1 PRUEBAS DE TRANSMISIÓN Y RECEPCIÓN DE DATOS EN
EL LPT1.
En el presente desarrollo del proyecto fue necesario realizar pruebas y
comprobaciones como envío de datos y recepción de datos, que se detallan a
continuación.
6.2 CODIFICACIÓN DE DATOS ADQUIRIDOS.
Para realizar la transmisión y recepción de los datos, la solución mas
sencilla es utilizar un protocolo semejando al de la impresora. El transmisor coloca la
información en la vía de datos y pulsa la línea de STROBE, para alertar al receptor;
este al percibir un pulso de STROBE, lee los datos y pulsa la línea de
ACKNOWLEDGE, indicando que la vía de datos está libre. Esto significa que cada
computadora debe detectar dos pulsos: ACK_IN y STRB_IN. La única forma de
detectar pulsos con seguridad es utilizando interrupción habilitada por flanco. En la
PC hay una interrupción destinada al puerto paralelo (IRQ7) y que ya esta destinada a
la línea de STROBE.
Para el envió de los datos, se necesita de dos líneas de “varias líneas”:
STROBE y ACKNOWLEDGE. Usando STROBE, el transmisor avisa al receptor de
que hay un nuevo dato en la vía de datos. Usando ACNOWLEDGE, el receptor avisa
al transmisor de que ya leyó el dato que está en la vía de datos.

149
Con estos dos parámetros se inicia el proyecto del cable paralelo. El uso de
una via de datos de 8 bits para cada computadora, lleva a un total de 20 líneas:
• 8 líneas para los datos a transmitir,
• 8 líneas de datos a recibir,
• 2 líneas para transmitir y recibir STROBE,
• 2 líneas para transmitir y recibir ACKNOWLEDGE.
El puerto paralelo ofrece 17 líneas:
• 8 líneas de salida,
• 5 líneas de entrada,
• 4 líneas vi direccionales (colector abierto).
El programa para la transmisión de datos fue desarrollado en el entorno de
programación Lab VIEW de National Instruments el cual se ve a continuación.
150
6.3 CONCLUSIONES Y RECOMENDACIONES Tenemos.
A. CONCLUSIONES.
1.- Se ha logrado cumplir con los objetivos de esta tesis: El estudio de la tarjeta de
adquisición de datos con sensores de temperatura y humo, así como sus aplicaciones
en el control de flujo y monitoreo de señales para la activación de los instrumentos
que prevengan un incendio.
2.- Con el uso de un computador, más la utilización de las tarjetas de adquisición de
datos se puede crear sofisticados sistemas de adquisición y control, para
implementarlos en el campo de la instrumentación o para la experimentación y
estudio en laboratorios donde se necesita medir las señales análogas o digitales,
también para realizar análisis estadísticos o monitoriar los comportamientos y la
respuesta de los procesos.
3.- Particularmente se nota que el software labVIEW es mucho mas flexible para la
adquisición, monitoreo y control de datos porque se ha probado su gran capacidad de
adaptabilidad con cualesquier hardware.
4.-Ante los diferentes tipos de indicadores se plantea la necesidad de escoger entre
uno u otro. Decir cuándo se debe utilizar cada uno es muy difícil ya que depende de
cada aplicación y, además, puesto que en programación no hay nada imposible,
podemos llegar a hacer que una gráfica simule el comportamiento de otra; sólo hace
falta un poco de tiempo y paciencia

151
5.-Esta aplicación es una herramienta bastante útil pues permite monitorear un voltaje
análogo proveniente de cualquier dispositivo electrónico desde el computador, lo que
abre la posibilidad de guardar y analizar los datos e incluso tomar acciones de control
desde el software.
Implementar el software en lenguaje G da la posibilidad al usuario de
modificar el funcionamiento del mismo de una manera sencilla, lo que hace a la
aplicación mas flexible y eficiente.
6.- Cuando se realice la programación (software) se debe tomar en cuenta la respuesta
de los dispositivos, para no tomar datos erróneos.
7.- Cuando se realice la calibración de los diferentes lazos de control se debe tomar en
cuenta el tiempo de respuesta de los diferentes elementos que forman dicho lazo y el
tipo de respuesta de estos dispositivos.
8.- Una conclusión muy clara al finalizar el proyecto consiste en reconocer la gran
utilidad que presenta el uso del computador en la actualidad, más en aquellos procesos
en que el control debe tender a lo exacto y en los que el instrumento a supervisar esta
muy alejado.
B. RECOMENDACIONES.
1.- Se recomienda a los usuarios que antes de efectuar el arranque del programa se
verifique todas conexiones entre la PC y los módulos de procesos así como la

152
configuración de los mismos lo cual involucra analizar su dirección, prioridad, y
demás parámetros que fueron mencionados en el capítulo II de este documento.
2.- En lo posible no debe alterarse el programa principal o uno de sus subprogramas
(Sub Vis) que aparecen en la pantalla de programación de LabVIEW, porque una sola
alteración o modificación hará que los controladores no respondan a los mensajes
enviados o peor aún todo el sistema se desconfigurará totalmente.
3.- Cuando se utilicen las señales digitales de las tarjetas de adquisición de datos se
recomienda utilizar un opto-aislador como medio para separar los niveles de
referencia del sistema de adquisición de datos.
4.- En lo referente a la realización de proyectos como este consideramos que es
necesario seguir ejecutándolos porque solo así se fomenta la investigación en los
estudiantes y lo que es más se logra crear un criterio formado de los mismos, lo cual
será beneficioso en su vida profesional.
5.- Este tipo de trabajo de investigación, se debería implementar en laboratorios o
sitios donde el peligro de un incendio sea mas evidente y en un lugar no al alcance de
personas sin autorización.
6.- Se recomienda utilizar un procesador de 700 Mhz o mas de velocidad para evitar
lasos de perdida entre la señal y la comunicación exterior así como un mínimo de 32
Mb en RAM.

153
BIBLOGRAFIA.
• Tom Sheldon, Enciclopedia de Redes -LAN TIMES 1991.
• THE FOXBORO COMPANY : “Instruction Book 761CNA and 761CSA Single
Station Micro Controllers”, Edición 1995.
• “AC24AT/AC422AT USER´S GUIDE”, [http://www.opto22.com] Edición
Diciembre de 1998.
• NATIONAL INSTRUMENTS: “Measurement and Automation Catalogue”,
Edición 1999.
• Tutorial [http://members.es.tripod.de/Rendfield/tut1.html] Edición 1995.
• SOISSOS , “Instrumentación Industrial”, Editorial Limusa México, Edición 1994.
• “USER´S GUIDE Controllers 761C Single Station” www.foxboro.com. 15 de
septiembre 1999.
• ZELENOVSKY , RICARDO ,“IBM PC Para Ingenieros”E.S.P.E. Quito-
Ecuador-1995.
• INSTRUPEDIA 99 NATIONAL INSTRUMENTS ,[http:// www natinst.com]. 15
de enero 1999
• CREUS, Antonio “Instrumentación Industrial” Marcombo S.A. Barcelona
España -1995.
• CURTIS, Johnson, “Process Control Instrumentation Technology”, Prentice Hall,
Englewood, -1974
• National Instruments. Measurement and Automation Catalog. 2000
• National data Adquisition Databook.Nationmal semiconductor. 1995
• Gary W Johnson 1994. Labview Graphical programming.
154
• Ronald J. Tocci . Sistemas digitales
• FLOYD, 97 Thomas L. Floyd. Fundamentos de Sistemas Digitales. Prentice Hall.
1997.
• HAYES, 96 J. P. Hayes. Introducción al diseño lógico digital. Addison-Wesley
iberoamericana.
• LabVIEW for Windows, User Manual; National Instruments; 1994.
• LabVIEW for Windows, Function Reference Manual, Ntional Instruments: 1994.
• LabVIEW Data Adquisition Course Manual , National Instruments; 1996.
• LEWIN, 85 Douglas Lewin. Design of Logic Systems. Van Nostrand Reinhold.
1985.
ANEXOS.
- Anteproyecto.
- Circuito impreso para el conector de la tarjeta 1 Analogico y 2 Digital.
- Circuitos 1 y 2 de la asignación de pines I/O del puerto LPT1
- Front Panel y Block Diagram de la programación CASE en lenguaje G para el
monitoreo y control del sistema automatizado con sensores en sistemas contra
incendios.


















