Capítulo III: Aspectos teóricos generales de la...
35
Proyecto Fin de Carrera José Ignacio Berdún Seijo Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 43 Capítulo III: Aspectos teóricos generales de la reconstrucción de imágenes en sistemas proyectivos
Transcript of Capítulo III: Aspectos teóricos generales de la...
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 43
Capítulo III: Aspectos teóricos generales de la reconstrucción de imágenes
en sistemas proyectivos
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 44
3.1. Reconstrucción 2D
En los capítulos anteriores hemos introducido la técnica PET y se han
sentado sus fundamentos físicos.
En la reconstrucción 2D, a pesar de que la imagen final reconstruida sea
habitualmente tridimensional, sólo se generan imágenes bidimensionales. La
imagen 3D se forma al final del proceso “apilando” las imágenes 2D
reconstruidas (fig. 15).
Figura 15. En la imagen tomográfica, se reconstruir una imagen 3D a partir de sus
imágenes 2D (cortes o rodajas). En el ejemplo se utilizan cortes coronales.
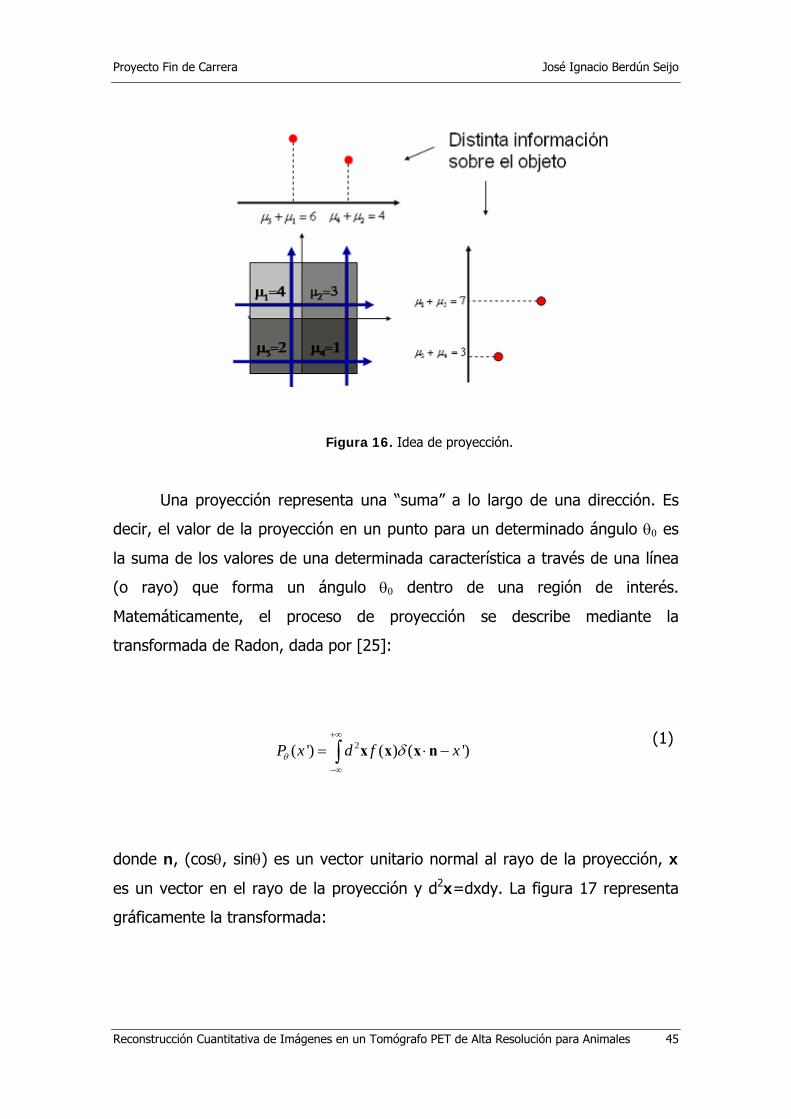
En el caso de la tomografía por emisión de positrones, la propiedad que
conforma la imagen es la actividad del radiofármaco inyectado a un sujeto. Los
datos de partida que nos ofrece el tomógrafo rPET son las líneas de respuesta o
LORs donde se encuentran los puntos o coordenadas espaciales en los que se
ha producido un fenómeno de aniquilación. Estas líneas permiten generar
proyecciones de la imagen que se pretende reconstruir (fig. 16).
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 45
Figura 16. Idea de proyección.
Una proyección representa una “suma” a lo largo de una dirección. Es
decir, el valor de la proyección en un punto para un determinado ángulo θ0 es
la suma de los valores de una determinada característica a través de una línea
(o rayo) que forma un ángulo θ0 dentro de una región de interés.
Matemáticamente, el proceso de proyección se describe mediante la
transformada de Radon, dada por [25]:
2( ') ( ) ( ')P x d f xθ δ+∞
−∞
= ⋅ −∫ x x x n (1)
donde n, (cosθ, sinθ) es un vector unitario normal al rayo de la proyección, x
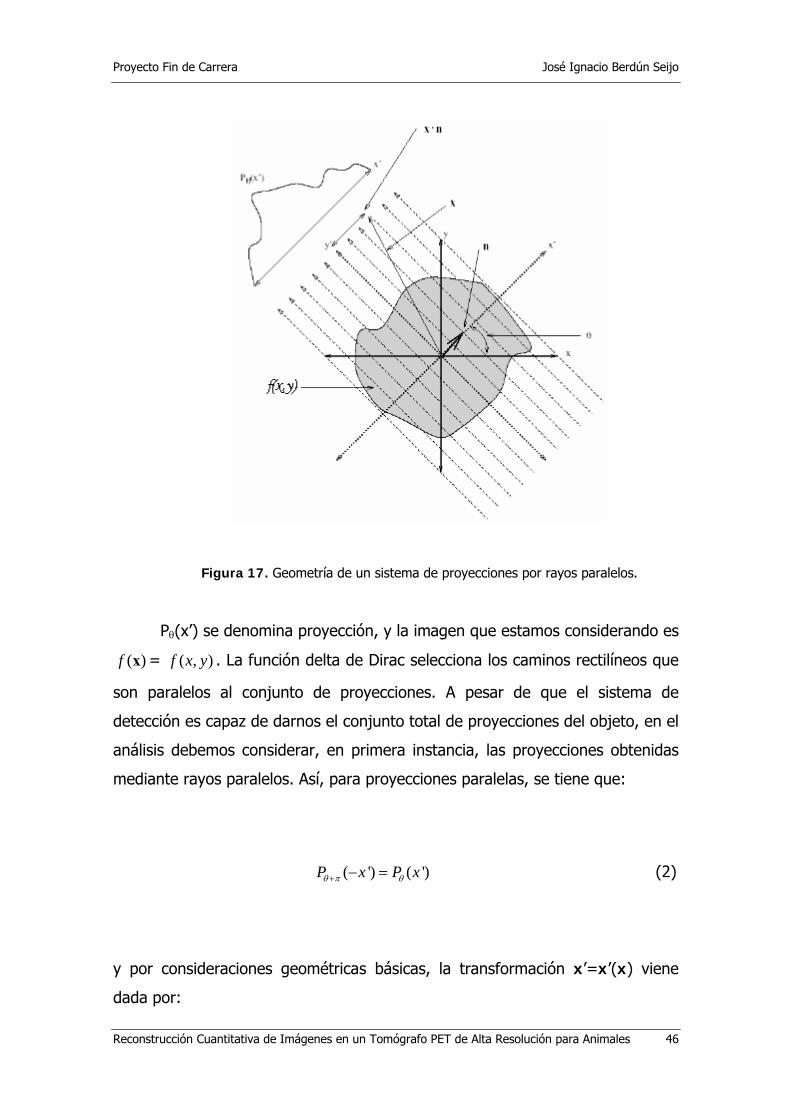
es un vector en el rayo de la proyección y d2x=dxdy. La figura 17 representa
gráficamente la transformada:
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 46
Figura 17. Geometría de un sistema de proyecciones por rayos paralelos.
Pθ(x’) se denomina proyección, y la imagen que estamos considerando es
( )f x = ( , )f x y . La función delta de Dirac selecciona los caminos rectilíneos que
son paralelos al conjunto de proyecciones. A pesar de que el sistema de
detección es capaz de darnos el conjunto total de proyecciones del objeto, en el
análisis debemos considerar, en primera instancia, las proyecciones obtenidas
mediante rayos paralelos. Así, para proyecciones paralelas, se tiene que:
( ') ( ')P x P xθ π θ+ − = (2)
y por consideraciones geométricas básicas, la transformación x’=x’(x) viene
dada por:

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 47
' cos sin
' sin cos
x x y
y x y
θ θ
θ θ
= +
= − + (3)
Dado que la rotación es una transformación que conserva el área (el
jacobiano de dicha transformación es la unidad), nuestra proyección en el
sistema transformado (x’,y’) viene dada por:
2( '') ' ( ') ( ' '') ' ( '', ')P x d f x x dy f x yθ δ+∞ +∞
−∞ −∞
= − =∫ ∫x x (4)
Podemos reescribir esta última ecuación como:
( ') ' ( ')P x dy fθ
+∞
−∞
= ∫ x (5)
El siguiente paso será calcular la transformada de Fourier de la proyección, que
resulta ser:

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 48
[ ]
[ ]
[ ]
2
2
( ) ' ( ') exp '
' ( ') exp '
( ) exp
S w dx P x jwx
d f jwx
d f jw
θ θ
+∞
−∞
+∞
−∞
+∞
−∞
= − =
= − =
= − ⋅
∫
∫
∫
x x
x x x n
(6)
Por otro lado, la transformada de Fourier bidimensional de ( )f x ,
F(u,v)=F(u), será:
[ ]2( ) ( ) expF d f j+∞
−∞
= − ⋅∫u x x u x (7)
que aplicando la transformación al plano polar en el dominio de Fourier, queda:
[ ]2cos( , ) ( ) exp
sinu w
F w d f jv w
θθ
θ
+∞
−∞
= ⎫→ = − ⋅⎬= ⎭
∫ x x x n (8)
Comparando las ecuaciones (6) y (8), queda comprobado que
( ) ( , )S w F wθ θ= (9)
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 49
Que no es otra cosa sino el teorema de cortes de Fourier, teorema
del corte central o teorema de la proyección (el nombre varía según la
bibliografía consultada) y sobre el cual se basan los métodos analíticos de
reconstrucción de imágenes que se presentan a continuación.
La informática del tomógrafo rPET nos presenta esta información sobre
las proyecciones del objeto de interés en un archivo denominado “modo lista”,
que no es más que una sucesión de dos tipos de eventos:
• Evento de sincronismo: información sobre la posición angular
de los detectores.
• Evento de datos: aniquilaciones vistas por cada pareja de
detectores, indicando energía medida y coordenadas en los
detectores (z,y).
Para emplear técnicas analíticas de reconstrucción, el primer paso es
representar toda la información de la que se dispone de una forma ordenada en
una estructura conocida como sinograma. El sinograma es una estructura en
la que se alinean las proyecciones para los sucesivos ángulos, es decir, se
organiza el número de cuentas (rayos detectados en coincidencia)
representando en el eje vertical la distancia al origen de coordenadas (ρ ó r) y
en el eje horizontal el ángulo (θ). Si esta estructura bidimensional que se forma
se representa como una imagen asignando un nivel de gris a cada valor del
sinograma, se puede obtener lo siguiente:
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 50
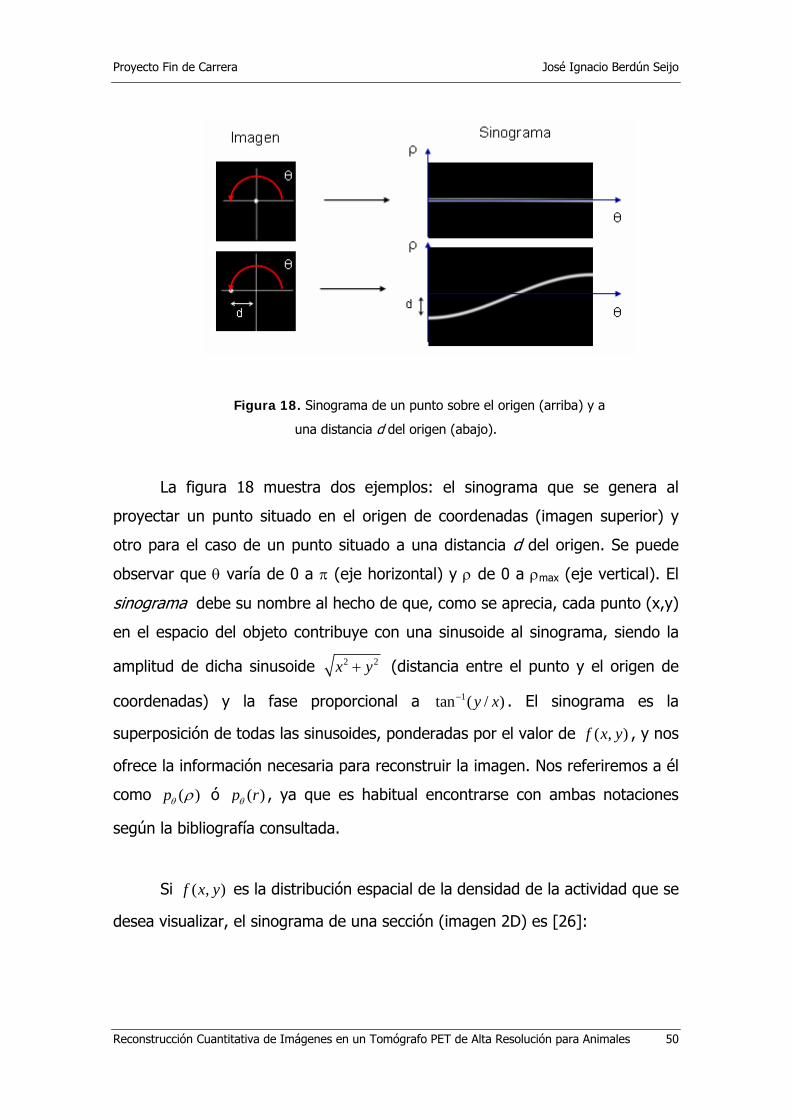
Figura 18. Sinograma de un punto sobre el origen (arriba) y a
una distancia d del origen (abajo).
La figura 18 muestra dos ejemplos: el sinograma que se genera al
proyectar un punto situado en el origen de coordenadas (imagen superior) y
otro para el caso de un punto situado a una distancia d del origen. Se puede
observar que θ varía de 0 a π (eje horizontal) y ρ de 0 a ρmax (eje vertical). El
sinograma debe su nombre al hecho de que, como se aprecia, cada punto (x,y)
en el espacio del objeto contribuye con una sinusoide al sinograma, siendo la
amplitud de dicha sinusoide 2 2x y+ (distancia entre el punto y el origen de
coordenadas) y la fase proporcional a 1tan ( / )y x− . El sinograma es la
superposición de todas las sinusoides, ponderadas por el valor de ( , )f x y , y nos
ofrece la información necesaria para reconstruir la imagen. Nos referiremos a él
como ( )pθ ρ ó ( )p rθ , ya que es habitual encontrarse con ambas notaciones
según la bibliografía consultada.
Si ( , )f x y es la distribución espacial de la densidad de la actividad que se
desea visualizar, el sinograma de una sección (imagen 2D) es [26]:

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 51
( , )( , ) ( , ) ( cos( ) sin( ), sin( ) cos( ))
línea líneaP f x y ds f s s ds
ρ θρ θ ρ θ θ ρ θ θ= = − +∫ ∫ (10)
donde se ha hecho un cambio de variable de cartesianas a polares, por
conveniencia, dadas las características del sistema. Por definición, la expresión
(10) corresponde a la transformada de Radon de la función ( , )f x y . En otros
términos, dicha transformada se puede definir en un punto como “la integral
del objeto sobre el hiperplano perpendicular al vector que une el origen del
sistema de coordenadas con el punto considerado”, donde se tiene que para el
caso 2D (el que nos ocupa), el hiperplano sería una línea mientras que en el
caso 3D dicho hiperplano sería un plano, como se muestra en la figura 19.
Figura 19. Interpretación geométrica de la transformada de Radon.
Así pues, en principio, para recuperar ( , )f x y a partir del sinograma
( , )P ρ θ no hay más que realizar una transformada inversa de Radon. Esto es
así para el caso en el que son despreciables las atenuaciones en el medio, ya
que no tiene en cuenta que la actividad que proviene de un punto más lejano o
que tenga que atravesar más estructuras (o estructuras con mayor absorción)
hasta alcanzar el detector habrá sido atenuada. Para simplificar el problema, lo
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 52
que se hace en PET es una corrección de la atenuación, y a partir de ahí se
plantea el problema, ya dentro del marco de la transformada de Radon.
En función de la base matemática sobre la que sustentan, las técnicas de
reconstrucción que permiten recuperar el volumen a partir de sus proyecciones
se dividen en dos grupos:
• técnicas analíticas: se basan en el teorema del corte central. • técnicas iterativas: basadas en métodos de resolución de sistemas de
ecuaciones
3.1.1.- Técnicas analíticas
Las técnicas analíticas se basan en el anteriormente demostrado
“teorema del corte central”, o “teorema de cortes de Fourier” o “teorema de la
proyección”. Entre ellas se encuentran los siguientes métodos:
• métodos directos de Fourier • convolución en el espacio de la señal y filtrado en la frecuencia
A continuación realizaremos un análisis de estos métodos, y nos
centraremos especialmente la convolución en el espacio de la señal y el filtrado
en la frecuencia, ya que es aquí donde podemos encontrar el método de
retroproyección filtrada, el cual analizaremos e implementaremos para
realizar la reconstrucción de imágenes en la consola MMWKS para rPET.
A modo de resumen, podemos representar en el siguiente gráfico (figura
20) todas las técnicas posibles (y la notación utilizada), si bien es cierto que no
todas ellas presentan las mismas ventajas [28], como se estudiará
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 53
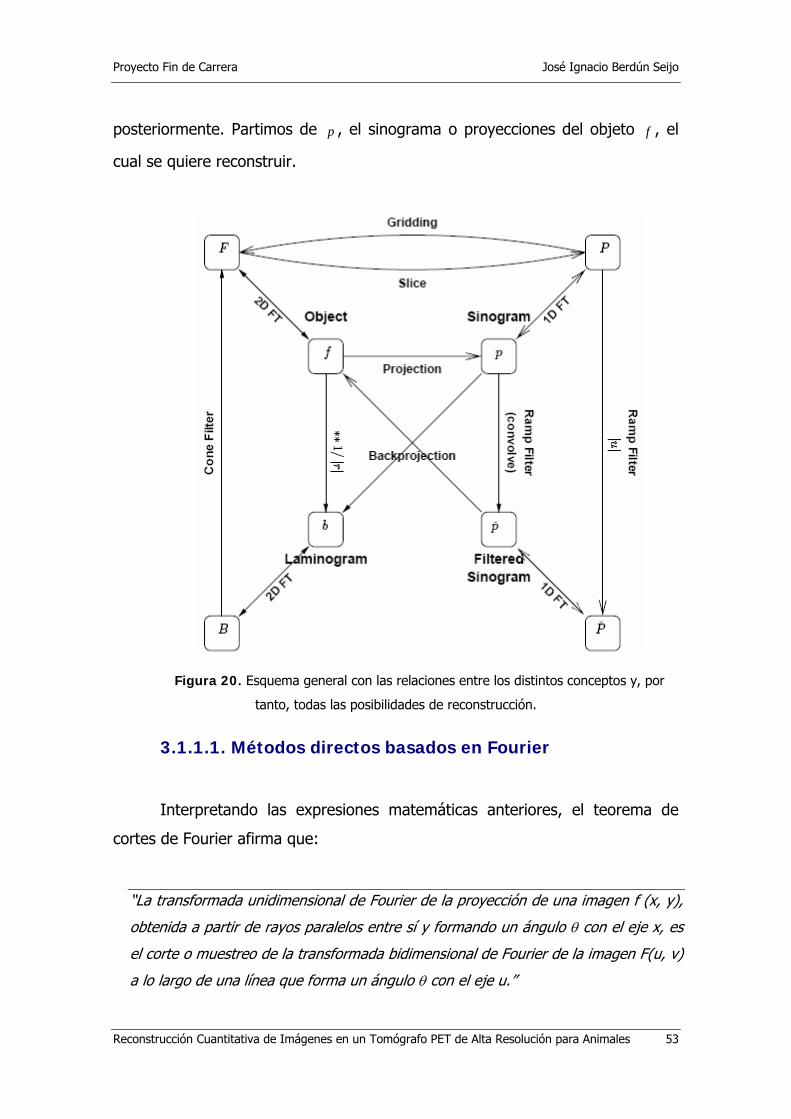
posteriormente. Partimos de p , el sinograma o proyecciones del objeto f , el
cual se quiere reconstruir.
Figura 20. Esquema general con las relaciones entre los distintos conceptos y, por
tanto, todas las posibilidades de reconstrucción.
3.1.1.1. Métodos directos basados en Fourier
Interpretando las expresiones matemáticas anteriores, el teorema de
cortes de Fourier afirma que:
“La transformada unidimensional de Fourier de la proyección de una imagen f (x, y),
obtenida a partir de rayos paralelos entre sí y formando un ángulo θ con el eje x, es
el corte o muestreo de la transformada bidimensional de Fourier de la imagen F(u, v)
a lo largo de una línea que forma un ángulo θ con el eje u.”

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 54
Esto mismo se puede representar alternativamente de una manera
gráfica según la figura 21:
Figura 21. Representación gráfica del teorema de cortes de Fourier.
Según este teorema, si tenemos las infinitas proyecciones de una
imagen, podemos obtener la imagen calculando una transformada
bidimensional inversa de Fourier, puesto que la transformada de Radon en el
caso bidimensional coincide con la transformada de Fourier. La función imagen
f(x,y) se obtiene a partir de F(u, v) usando la transformada inversa,
2 ( )( , ) ( , ) j ux vyf x y F u v e dudvπ+∞ +∞
+
−∞ −∞
= ∫ ∫ (11)
Consideremos nuestros datos en el dominio de la frecuencia (Fourier),
donde son representados en un sistema polar en el que el muestreo es no
uniforme: más denso en el centro (bajas frecuencias) y con una densidad de
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 55
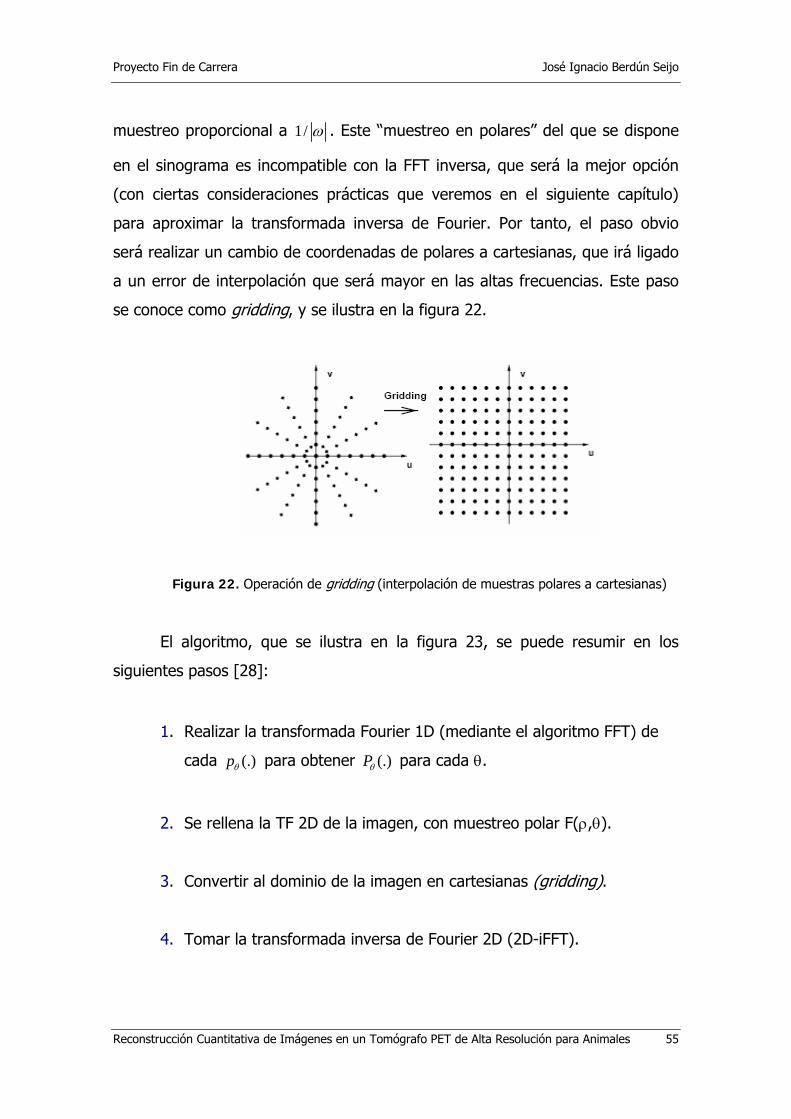
muestreo proporcional a 1/ ω . Este “muestreo en polares” del que se dispone
en el sinograma es incompatible con la FFT inversa, que será la mejor opción
(con ciertas consideraciones prácticas que veremos en el siguiente capítulo)
para aproximar la transformada inversa de Fourier. Por tanto, el paso obvio
será realizar un cambio de coordenadas de polares a cartesianas, que irá ligado
a un error de interpolación que será mayor en las altas frecuencias. Este paso
se conoce como gridding, y se ilustra en la figura 22.
Figura 22. Operación de gridding (interpolación de muestras polares a cartesianas)
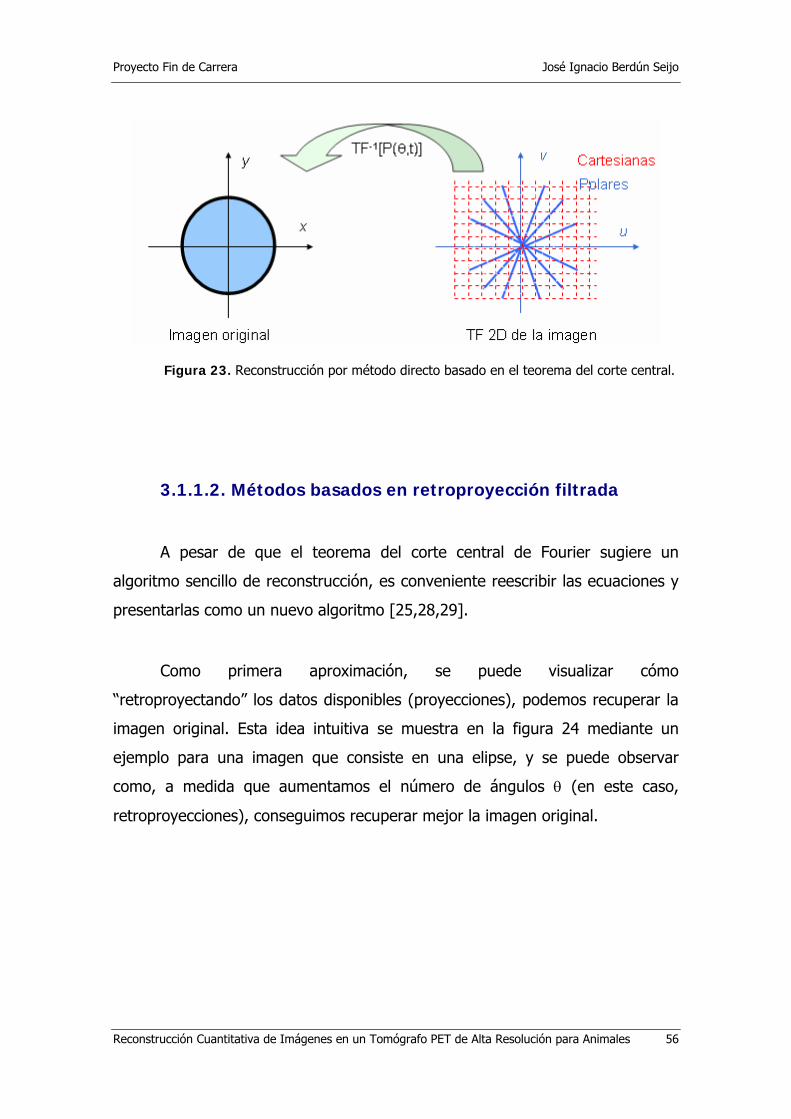
El algoritmo, que se ilustra en la figura 23, se puede resumir en los
siguientes pasos [28]:
1. Realizar la transformada Fourier 1D (mediante el algoritmo FFT) de
cada (.)pθ para obtener (.)Pθ para cada θ.
2. Se rellena la TF 2D de la imagen, con muestreo polar F(ρ,θ).
3. Convertir al dominio de la imagen en cartesianas (gridding).
4. Tomar la transformada inversa de Fourier 2D (2D-iFFT).
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 56
Figura 23. Reconstrucción por método directo basado en el teorema del corte central.
3.1.1.2. Métodos basados en retroproyección filtrada
A pesar de que el teorema del corte central de Fourier sugiere un
algoritmo sencillo de reconstrucción, es conveniente reescribir las ecuaciones y
presentarlas como un nuevo algoritmo [25,28,29].
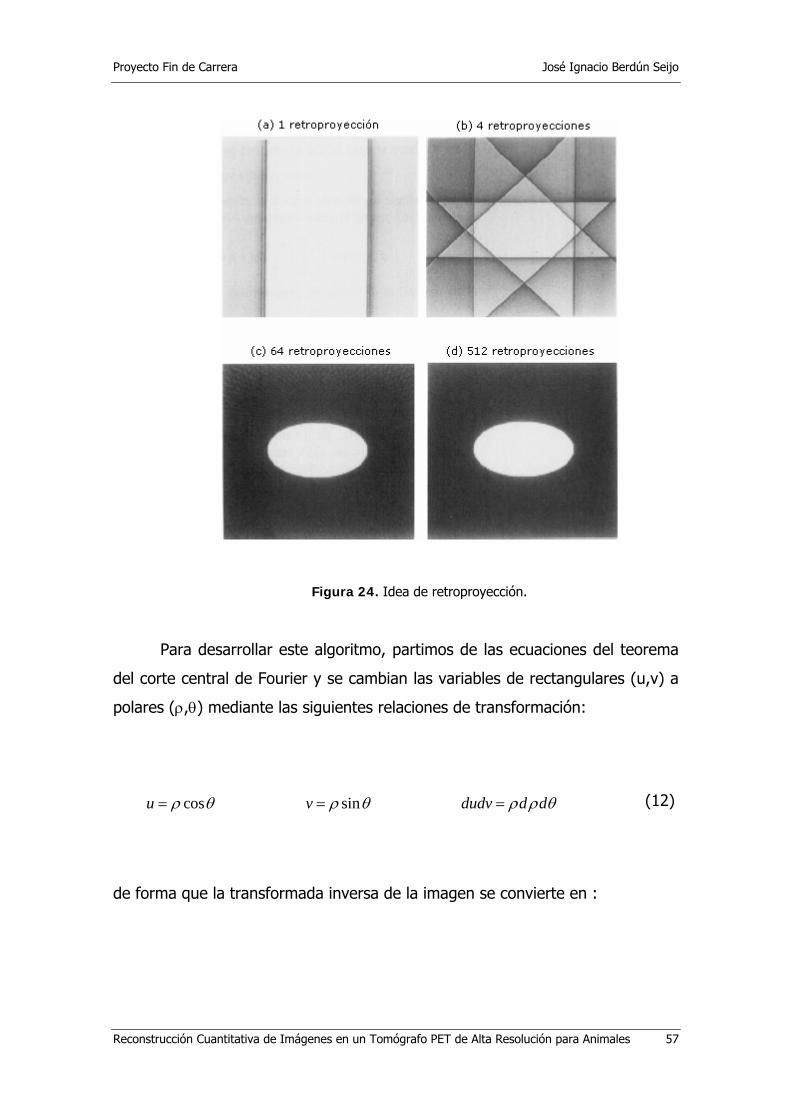
Como primera aproximación, se puede visualizar cómo
“retroproyectando” los datos disponibles (proyecciones), podemos recuperar la
imagen original. Esta idea intuitiva se muestra en la figura 24 mediante un
ejemplo para una imagen que consiste en una elipse, y se puede observar
como, a medida que aumentamos el número de ángulos θ (en este caso,
retroproyecciones), conseguimos recuperar mejor la imagen original.
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 57
Figura 24. Idea de retroproyección.
Para desarrollar este algoritmo, partimos de las ecuaciones del teorema
del corte central de Fourier y se cambian las variables de rectangulares (u,v) a
polares (ρ,θ) mediante las siguientes relaciones de transformación:
cosu ρ θ= sinv ρ θ= dudv d dρ ρ θ= (12)
de forma que la transformada inversa de la imagen se convierte en :
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 58
22 ( cos )
0 0
( , ) ( , ) j x ysenf x y F e d dπ
πρ θ θρ θ ρ ρ θ∞
+= ∫ ∫ (13)
Y la ecuación (13) se puede rescribir teniendo en cuenta las variaciones
por separado de θ y además que F(ρ,θ + 180) = F(-ρ,θ):
2
0
( , ) ( , ) j tf x y F e d dπ
πρρ θ ρ ρ θ∞
−∞
⎡ ⎤= ⎢ ⎥
⎣ ⎦∫ ∫ donde cos sint x yθ θ= + (14)
Finalmente, sustituyendo la transformada bidimensional F(ρ,θ) por la
transformada unidimensional de la proyección Sθ(ρ), obtenemos:
2
0 0
( , ) ( ) ( )j tf x y S e d d Q t dπ π
πωθ θω ω ω θ θ
∞
−∞
⎡ ⎤= =⎢ ⎥
⎣ ⎦∫ ∫ ∫ (15)
que podemos expresar como una operación de filtrado (convolución):
[ ]0
( , ) ( ) ( )f x y P t h t dπ
θ θ= ∗∫ (16)
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 59
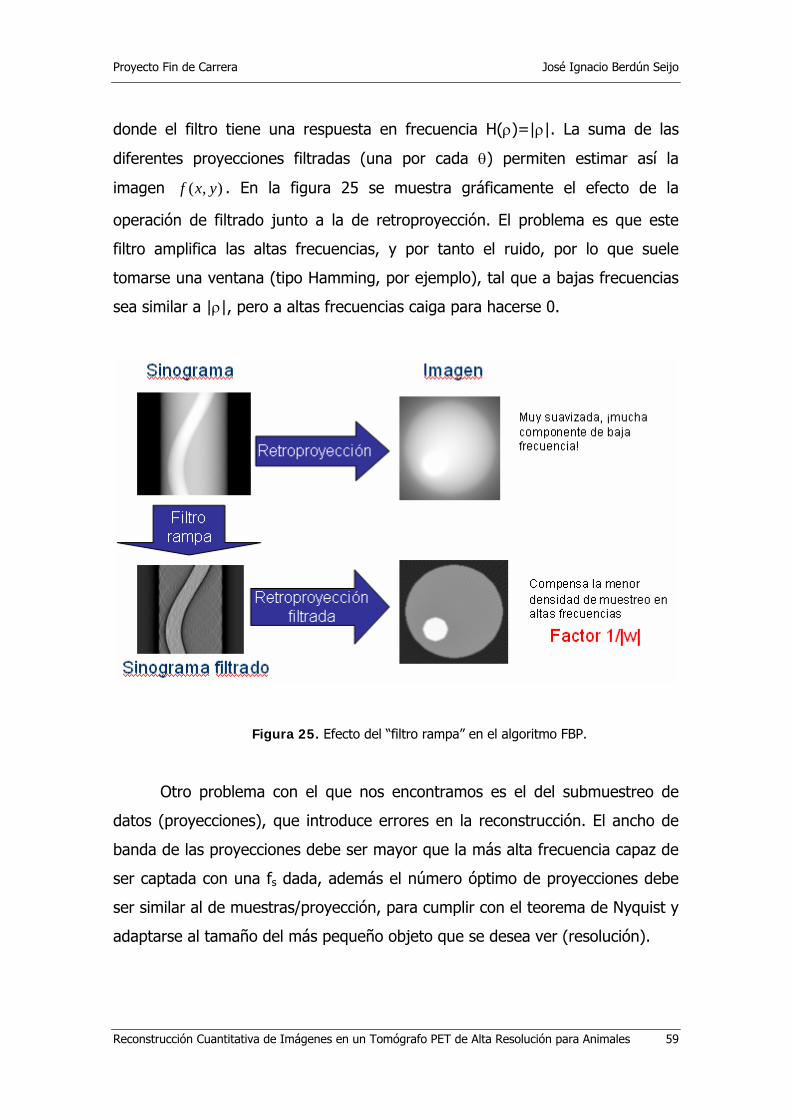
donde el filtro tiene una respuesta en frecuencia H(ρ)=|ρ|. La suma de las
diferentes proyecciones filtradas (una por cada θ) permiten estimar así la
imagen ( , )f x y . En la figura 25 se muestra gráficamente el efecto de la
operación de filtrado junto a la de retroproyección. El problema es que este
filtro amplifica las altas frecuencias, y por tanto el ruido, por lo que suele
tomarse una ventana (tipo Hamming, por ejemplo), tal que a bajas frecuencias
sea similar a |ρ|, pero a altas frecuencias caiga para hacerse 0.
Figura 25. Efecto del “filtro rampa” en el algoritmo FBP.
Otro problema con el que nos encontramos es el del submuestreo de
datos (proyecciones), que introduce errores en la reconstrucción. El ancho de
banda de las proyecciones debe ser mayor que la más alta frecuencia capaz de
ser captada con una fs dada, además el número óptimo de proyecciones debe
ser similar al de muestras/proyección, para cumplir con el teorema de Nyquist y
adaptarse al tamaño del más pequeño objeto que se desea ver (resolución).
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 60
Todos estos problemas prácticos serán analizados en el capítulo
posterior, en el que se estudia la implementación real del método de la
retroproyección filtrada.
3.1.2.- Técnicas iterativas
Una alternativa a las técnicas analíticas para la reconstrucción de
imágenes en sistemas proyectivos consiste en las llamadas técnicas iterativas
[28] En este apartado nos limitaremos a citar estas técnicas, ya que no se han
implementado en la consola MMWKS y su explicación detallada escapa a los
objetivos del proyecto final de carrera.
Se trata de métodos investigados desde hace más de 15 años que
requieren unos grandes recursos informáticos y, dependiendo de los datos,
suelen llegar a obtener mejores resultados que las técnicas analíticas descritas
anteriormente.
La idea fundamental de los métodos iterativos es optimizar alguna
función de coste dentro de un sistema de ecuaciones generalmente
complejo y sujeto a ciertas restricciones, de la forma:
11 1 12 2 13 3 1 1
21 1 22 2 23 3 2 2
1 1 2 2 3 3
......
......
n n
n n
m m m mn n m
w f w f w f w f pw f w f w f w f p
w f w f w f w f p
+ + + + =+ + + + =
+ + + + =
Una propiedad bastante positiva de los métodos de reconstrucción
iterativos es que es posible introducir la llamada “matriz del sistema”, que
contiene “pesos” o ponderaciones que reflejen la naturaleza del problema y las
características del sistema de adquisición, ya sea de emisión de positrones, de
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 61
rayos X, etc. Esto permite a los algoritmos dirigir las soluciones a unos
requerimientos clínicos específicos.
Las técnicas iterativas más habituales, válidas tanto para reconstrucción
2D como 3D, son las siguientes [25,29]:
• Maximum likelihood-expectation maximisation (ML-EM)
• Ordered subset expectation maximum (OSEM)
• Space-alternative generalized expectation maximum (SAGE)
• Least squares minimization (LSQ)
• Algebraic reconstruction technique (ART)
• Maximum a posteriori (Bayesian) approach (MAP)
• Maximum entropy (ME)
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 62
3.2. Reconstrucción 3D
En este apartado se realiza una breve descripción de métodos de
reconstrucción 3D [29], es decir, aquéllos que utilizan toda la información
disponible y obtienen directamente una imagen 3D. Hay que reseñar que estos
métodos han sido implementados en la consola MMWKS, pero no forman parte
del trabajo realizado en este Proyecto Fin de Carrera, que se centra
exclusivamente en el método de retroproyección filtrada (técnica de
reconstrucción 2D).
Los métodos de reconstrucción 3D utilizan simultáneamente los datos de
todas las proyecciones del objeto para reconstruir directamente una imagen
tridimensional, sin considerar el volumen como una “pila” de imágenes
bidimensionales. Este hecho conlleva claramente dos consecuencias:
• La resolución final de la imagen aumenta considerablemente, sobre
todo debido al hecho de que el ruido afecta en mucha menor medida
(entre otros factores porque se dispone de más cuentas que en caso
2D, por tanto mejor estadística y SNR).
• El tiempo de procesado del algoritmo también aumenta
considerablemente, siendo a menudo éste el factor crítico que hace
decidir si realmente es práctico usar un método de reconstrucción 3D.
Por tanto, habrá que decidir, según cada aplicación, si es conveniente
usar una técnica u otra. Por lo general, la resolución que ofrece el método de
retroproyección filtrada (2D) es suficientemente buena y no compensa usar un
método de reconstrucción 3D debido a que requiere un tiempo de procesado
mucho mayor (entre 5 y 10 veces). Sólo en contadas ocasiones, en las que los
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 63
datos disponibles (proyecciones o sinograma) sean muy ruidosos, se suele
justificar el uso de un algoritmo de reconstrucción 3D.
3.2.1.- Fundamentos de la reconstrucción 3D
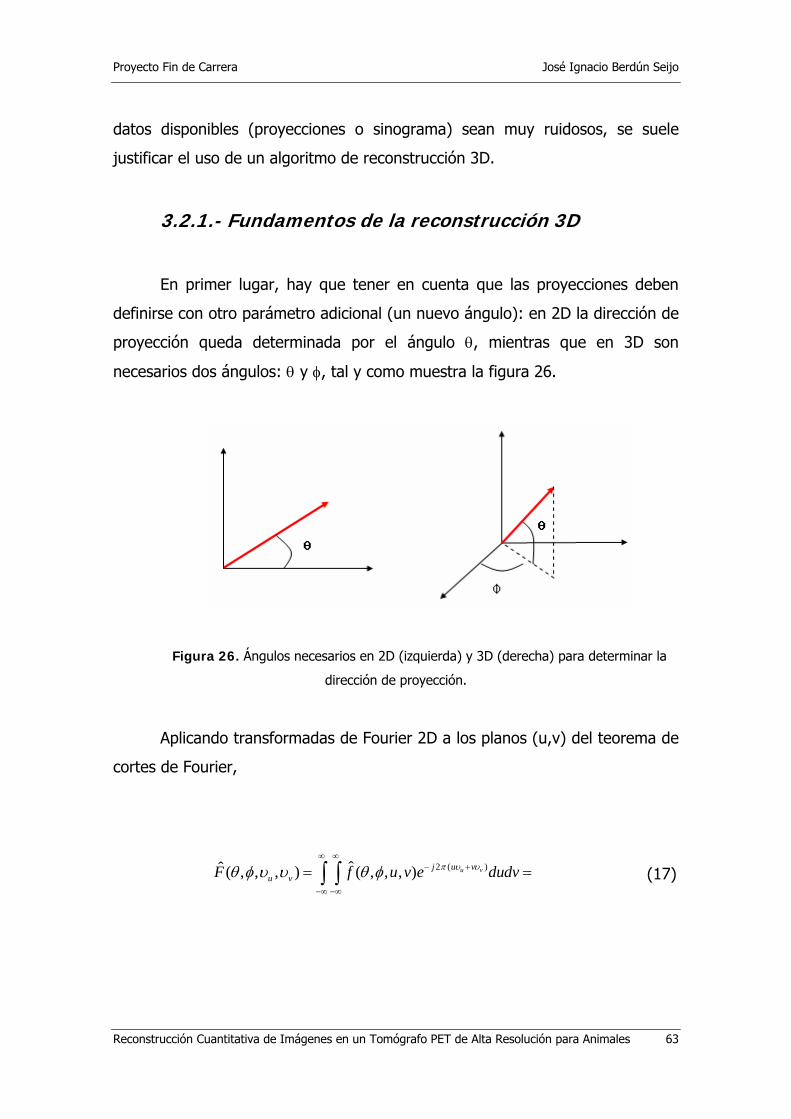
En primer lugar, hay que tener en cuenta que las proyecciones deben
definirse con otro parámetro adicional (un nuevo ángulo): en 2D la dirección de
proyección queda determinada por el ángulo θ, mientras que en 3D son
necesarios dos ángulos: θ y φ, tal y como muestra la figura 26.
Figura 26. Ángulos necesarios en 2D (izquierda) y 3D (derecha) para determinar la
dirección de proyección.
Aplicando transformadas de Fourier 2D a los planos (u,v) del teorema de
cortes de Fourier,
2 ( )ˆˆ ( , , , ) ( , , , ) u vj u vu vF f u v e dudvπ υ υθ φ υ υ θ φ
∞ ∞− +
−∞ −∞
= =∫ ∫ (17)
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 64
2 ( )( ) u vj u vf s u v e dudvdsπ υ υτ α β∞ ∞ ∞
− +
−∞ −∞ −∞
= + +∫ ∫ ∫
Esta última ecuación (17) nos indica una relación directa con la
transformada de Fourier tridimensional de la función ( )f r .
2( ) ( ) jF f e dπ∞ ∞ ∞
− ⋅
−∞ −∞ −∞
= ∫ ∫ ∫ r υυ r r (18)
2( ) ( ) jf F e dπ∞ ∞ ∞
− ⋅
−∞ −∞ −∞
= ∫ ∫ ∫ r υr υ υ (19)
donde υ representa al vector frecuencias (tridimensional). Ahora, los
parámetros de integración de la ecuación (17) se cambian por x , y y z , es
decir, por el vector r . Si τ , α y β son ortogonales, se tiene que:
s u v= + +r τ α β ⇒ u α= r y v β= r ⇒ (20)
⇒ 2 ( )ˆ ( , , , ) ( ) u vju vF f e dπ υ α υ βθ φ υ υ
∞ ∞ ∞− ⋅ +
−∞ −∞ −∞
= ∫ ∫ ∫ rr r (21)

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 65
Este interesante resultado nos pone de manifiesto que la transformada
de Fourier bidimensional de las integrales de línea es precisamente la
transformada de Fourier tridimensional de la función que se pretende
reconstruir [28].
ˆ ( , , , ) ( )u v u vF Fθ φ υ υ υ υ= +α β (22)
Este es el teorema de cortes de Fourier en el espacio tridimensional, e
implica que la función ( )f r puede reconstruirse aplicando una transformada de
Fourier 2D al sinograma para todos los valores de ( , )θ φ , para finalmente
recuperar el volumen deseado empleando una transformada inversa de Fourier
3D.
A partir de este punto, el desarrollo continúa hasta obtener las
ecuaciones del método 3D-FBP o 3DRP (retroproyección 3D), pero se sale del
objetivo del proyecto. Por tanto, nos limitaremos a comentar algunas
características cualitativas del método, que ha sido implementado en la consola
MMWKS. En este método, se da la particularidad de que disponemos de
información redundante, como se ilustra en las figuras 27 y 28.
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 66
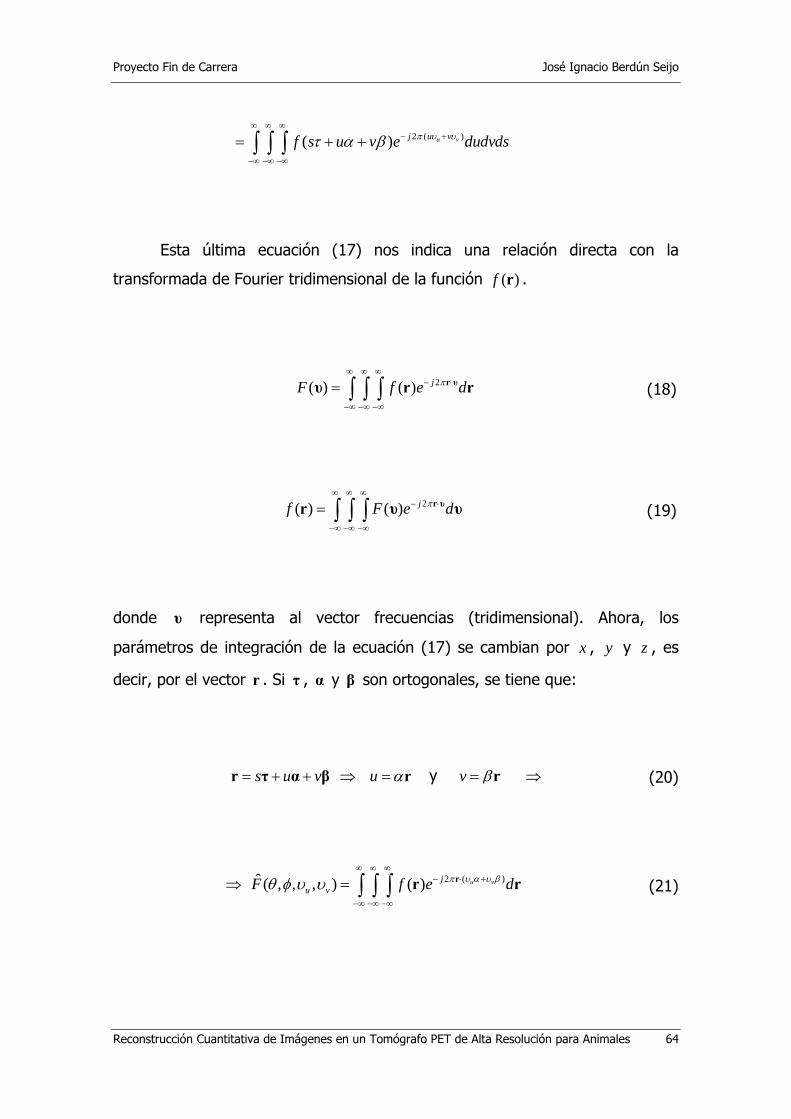
Figura 27. Transformación en el caso 3D para las proyecciones con θ=0.
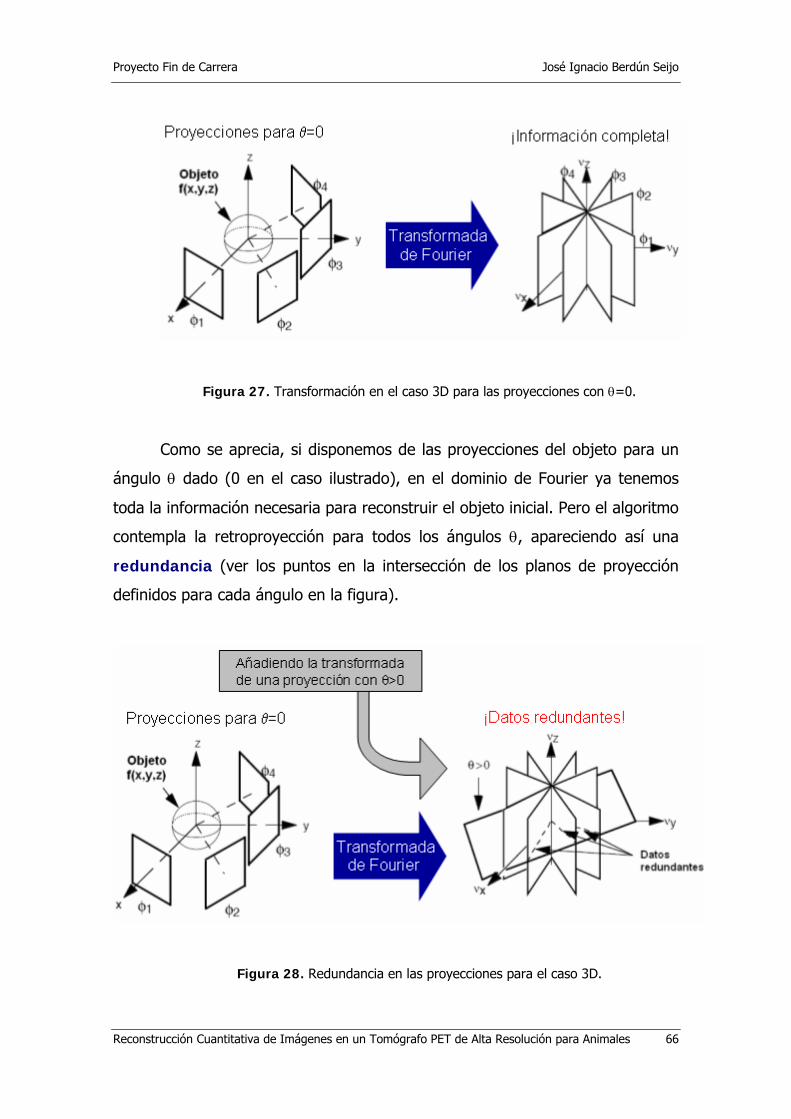
Como se aprecia, si disponemos de las proyecciones del objeto para un
ángulo θ dado (0 en el caso ilustrado), en el dominio de Fourier ya tenemos
toda la información necesaria para reconstruir el objeto inicial. Pero el algoritmo
contempla la retroproyección para todos los ángulos θ, apareciendo así una
redundancia (ver los puntos en la intersección de los planos de proyección
definidos para cada ángulo en la figura).
Figura 28. Redundancia en las proyecciones para el caso 3D.

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 67
Este efecto se corrige gracias al filtro de Colsher, en forma de “cono”
(figura 29), equivalente al filtro rampa que aparece en la 2D-FBP.
Figura 29. Representación gráfica del filtro de Colsher.
Una peculiaridad que aparece en este método y que no ocurría en el
caso 2D es que ahora no se dispone de todos los rayos necesarios en las
proyecciones: hay ciertos valores de θ para los que la geometría de los bloques
detectores hace imposible registrar ciertas LORs, como muestra la figura 30.
Figura 30. 3DRP: el problema de la falta de proyecciones (rayos oblicuos truncados).
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 68
Por lo tanto, habrá que “estimar” de alguna manera los datos que nos
faltan. Esta estimación se suele hacer proyectando de nuevo los datos
existentes para completar así los sinogramas incompletos, siendo esta
operación la que consume un mayor tiempo en el algoritmo y lo hace
considerablemente más lento que el 2D-FBP. Una variante que pretende
precisamente reducir este cómputo es el algoritmo FAVOR (FAst VOlume
Reconstruction), del que no entraremos en detalle por razones obvias, que
también ha sido implementado en la consola MMWKS y ofrece mejor calidad
que el método 2D-FBP sin requerir tanto tiempo como el 3D-FBP. De esta
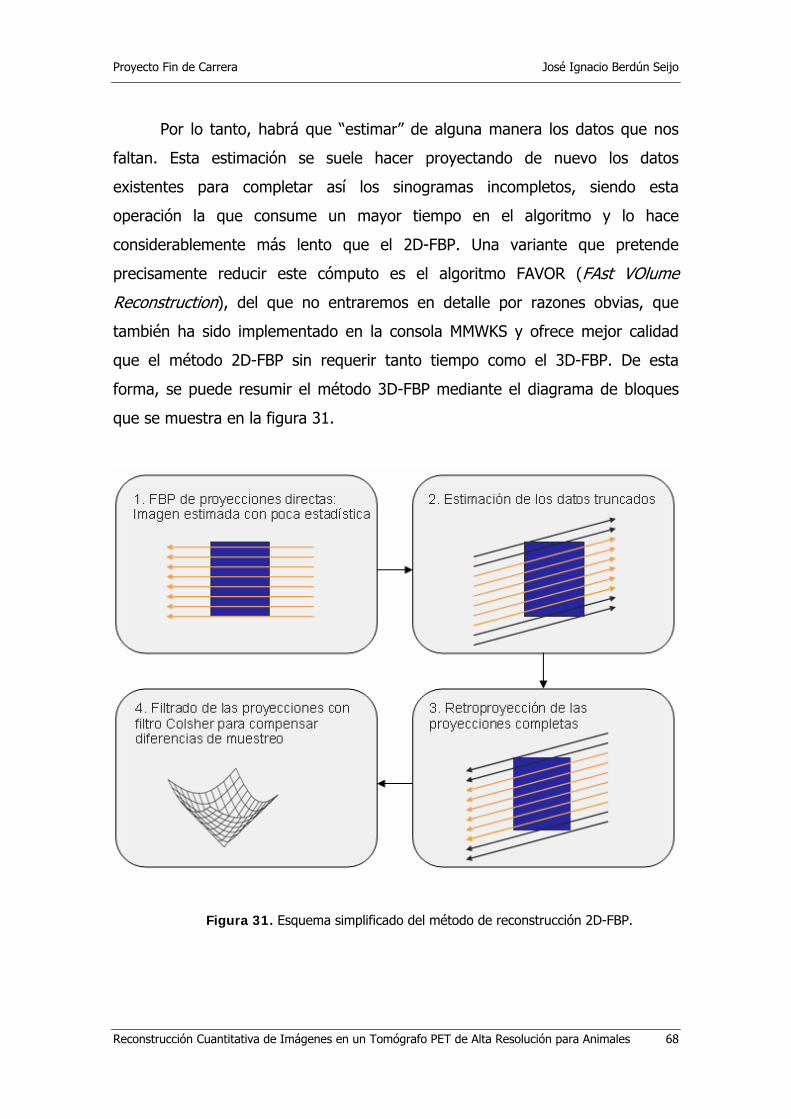
forma, se puede resumir el método 3D-FBP mediante el diagrama de bloques
que se muestra en la figura 31.
Figura 31. Esquema simplificado del método de reconstrucción 2D-FBP.
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 69
3.2.2.- El proceso de “Rebinning” axial
La propia geometría del sistema detector de radiación hace que durante
el proceso de adquisición se registren LORs correspondientes a varias rodajas.
Si consideramos una reconstrucción 2D, sólo trabajaremos con secciones o
rodajas por separado, y aunque únicamente nos interesan los datos de cada
rodaja individual, disponemos de información adicional a la estrictamente
necesaria para reconstruir una sección o corte de la imagen, en forma de
proyecciones oblicuas. [30].
En otras palabras, para cada corte bidimensional del volumen, además
de los rayos coplanares a la sección considerada, se dispone de otros rayos que
no pertenecen a ese plano, debido a la propia estructura en forma matricial de
los detectores. Esto se muestra en la figura 32, donde se representa un
esquema simplificado con únicamente 4 filas de cristales centelleadores en cada
matriz en un bloque detector, y se comprueba que para cada sección, además
del rayo rojo (el que consideramos en el plano de la imagen 2D que se va a
reconstruir), se reciben todas las posibilidades de rayos entre cristales
centelleadores de cada bloque detector. Hay que destacar que sólo se está
considerando el eje Z, y que en cada plano XY se utilizan todas las posibles
combinaciones de rayos (de ahí saldrán los ángulos θ).

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 70
Figura 32. Diagrama simplificado de LORs detectadas en el eje Z.
En el sistema rPET, dado que tenemos 35 filas y 30 columnas en la
matriz de cristales, tendremos 35 sinogramas directos7, formados por los
rayos rojos de la figura 32. Pero además, nos encontramos con muchos más
datos (rayos en color marrón) formando los sinogramas oblicuos.
El proceso de rebinning axial consiste en agrupar los rayos no coplanares
con los coplanares para cada sección, lo que permite disponer de los datos
registrados en la forma conveniente para su tratamiento dentro de una
reconstrucción 2D. Es decir, según el esquema de la figura 32, a los rayos de
7 Si nombramos a los cristales detectores con un par de números (Z,Y), donde Z toma
valores entre 1…35 dentro de una misma columna de la matriz e Y los toma entre 1…30 dentro
de una misma fila, los sinogramas directos se forman con los rayos entre las parejas de
detectores (Zi,Yn) - (Zm,Yn), mientras que los oblicuos lo hacen con los rayos entre las parejas
(Zi,Yj) - (Zm,Yn), con j≠n.

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 71
color rojo “se le suman” los rayos marrones, y la forma en la que se hace esta
operación dependerá del tipo de rebinning. De esta manera, se aprovechan los
rayos que a priori no son necesarios para reconstruir una rodaja y se añaden a
los que sí lo son. En realidad, esta es una operación de vital importancia, ya
que la cantidad de datos de que se dispone en PET suele ser muy pequeña en
comparación con otras imágenes tomográficas (como TAC), lo que hace que la
imagen final reconstruida sea más ruidosa. Por tanto, mediante el rebinning,
conseguimos mejorar un poco “la estadística” y relación señal-ruido al
aprovechar los datos de los sinogramas oblicuos.
Sin embargo, también sucede que puede empeorar la calidad de la
imagen final reconstruida si excedemos una cantidad moderada de rayos
cruzados, ya que no hay que olvidar que en el algoritmo de reconstrucción se
están considerando como directos y por consiguiente este proceso no deja de
ser una aproximación.
Los 3 tipos de rebinning más utilizados son SSRB, MSRB y FORE. En el
presente proyecto final de carrera se ha decidido implementar el primero de
ellos debido a que se encuentra muy contrastado, mientras que el MSRB está
en entredicho (publicaciones recientes confirman que este algoritmo no aporta
realmente beneficios con respecto al SSRB) y el FORE es quizá un algoritmo
excesivamente complejo que será objeto de estudio para las posibles líneas
futuras del desarrollo de la consola MMWKS.
3.2.2.1. SSRB (Single Slice ReBinning)
El algoritmo SSRB [Daube-Witherspoon et al., 1987] se basa en una
aproximación muy simple, aplicable sólo en las cercanías del plano axial
considerado, es decir, será válido sólo para una pequeña apertura angular en
torno al eje Z. Asigna una LOR entre dos cristales detectores (o rayo cruzado)

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 72
al sinograma directo de la rodaja (transaxial) que queda en medio, es decir,
axialmente entre los 2 cristales. En otras palabras, considera sinogramas
oblicuos adyacentes como directos.
En la figura 33 se muestra esta técnica aplicada a un sinograma en
concreto. De nuevo se realiza el estudio para el eje axial (eje Z) y se están
obviando todas las distintas combinaciones entre cristales de una misma fila.
Los rayos marrones (sinogramas oblicuos) se sumarían al rayo rojo, que es el
que define el sinograma directo.
Figura 33. Representación gráfica del algoritmo SSRB: los rayos marrones (sinogramas
cruzados) de suman al rayo rojo, que es el que define el sinograma directo.
Como se ha reseñado anteriormente, este método de rebinning es el que
ha sido implementado en la consola MMWKS, dando unos excelentes
resultados. El número de sinogramas adyacentes considerado para sumar a uno
directo se controla mediante un parámetro (Axial difference), que aparece
configurado por defecto a 10 y es introducido por el usuario. Cuanto menor
sea, menos rayos se consideran en la reconstrucción y por tanto se dispone de
menos estadística, empeorando la calidad de la imagen final (se vuelve más
ruidosa). Pero tampoco conviene aumentarlo demasiado, ya que lejos de la
rodaja definida por el sinograma directo, la aproximación en la que se basa deja

Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 73
de ser válida y la imagen reconstruida pierde resolución por este “aplastamiento
de sinogramas”.
Figura 34. Reconstrucción 2D-FBP de imagen de ratón con MMWKS, vista coronal.
A la izquierda, usando 2D-FBP sin rebinning. A la derecha, usando SSRB-10.
La figura 34 muestra dos imágenes de un ratón reconstruidas con la
herramienta desarrollada para la consola MMWKS, donde una no emplea
rebinning y la otra ha empleado el algoritmo SSRB con una diferencia axial de
10. Se comprueba cómo el uso del SSRB mejora de forma significativa la
relación señal a ruido.
3.2.2.2. MSRB (Multi-Slice ReBinning)
El algoritmo MSRB [Lewitt et al., 1994] es un rebinning más sofisticado
que el anterior, donde un sinograma Si,j contribuye a todas las rodajas k tales
que las LORs definidas entre las filas de cristales i y j dentro de una pareja de
bloques detectores interseccionan la rodaja k dentro del field of view
caracterizado por un radio transaxial RFOV. Es decir, según el esquema de la
figura, cada rayo oblicuo (color marrón) o sinograma oblicuo se sumaría de
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 74
forma ponderada a todos los rayos directos (color rojo) o sinogramas directos
con los que se cruza. De esta manera, el sinograma Sk se construye como una
media ponderada de todos los sinogramas Si,j que satisfacen esta condición.
Otra diferencia con respecto al SSRB es que tras la reconstrucción de
todas las imágenes 2D (una por cada sinograma Sk), cada columna de vóxels
tiene que ser “deconvolucionada” por medio de un algoritmo iterativo
multiplicativo, que se encuentra descrito en [Lewitt et al., 1994].
El algoritmo MSRB es más preciso que el SSRB, pero por el contrario está
supeditado a la presencia del ruido en los datos, ya que a veces puede sufrir
problemas de inestabilidad en los casos de datos muy ruidosos. Además, según
los últimos estudios, parece ser que realmente no aporta mejoras significativas
con respecto al algoritmo SSRB, sino que únicamente añade complejidad al
método de reconstrucción.
3.2.2.3. FORE (Fourier ReBinning)
El algoritmo FORE [Lewitt et al., 1994] es el algoritmo de rebinning que
fue desarrollado en último lugar. En este caso, el criterio que se toma para
decidir cuáles de los rayos oblicuos son sumados a una determinada rodaja
transaxial se basa en la relación frecuencia-distancia de los datos en el espacio
de Fourier [Defrise et al., 1995; Lewitt et al., 1994].
Al igual que los anteriores, este algoritmo distribuye la información de los
datos 3D (sinogramas oblicuos) dentro de una pila de sinogramas directos
(datos 2D), y la imagen es reconstruida de forma bidimensional corte a corte,
usando por ejemplo el método de retroproyección filtrada.
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 75
FORE requiere un paso preliminar: un remuestreo de los datos de los
que se dispone. Consideremos un tomógrafo cilíndrico con N filas en la matriz
de cristales centelleadores en cada bloque detector, con un field of view con
radio RFOV y su eje sobre el eje Z, como lo hemos hecho hasta ahora en el
sistema rPET. Con esta premisa, nos disponemos a determinar la relación
frecuencia-distancia para los datos 3D. En primer lugar, se toma la
transformada de Fourier de un sinograma ( , , , tan )rp zρ θ φ donde ρ y θ son las
variables ordinarias del sinogramas según hemos estudiado, ( ) / 2A Bz z z= − el
valor medio de las coordenadas axiales de 2 detectores en coincidencia y
tan ( ) / 2A Bz z Rφ = − la tangente del ángulo entre una LOR y el plano transaxial:
max
min
2
0
( , , , tan ) ( , , , tan ) jk jr rP k z d d p z e
ρπθ ωρ
ρ
ω φ θ ρ ρ θ φ − −= ∫ ∫ (23)
Donde k representa el índice (número entero) de la serie de Fourier, y ω la
frecuencia espacial continua, que se corresponde con la coordenada ρ . Los
sinogramas son muestreados con [0, )θ π∈ , debido a que la información que se
registra en la semicircunferencia complementaria es obviamente la misma. Por
tanto, los sinogramas con [0,2 )θ π∈ se puede completar mediante la relación:
( , , , tan ) ( , , , tan )r rp z p zρ θ π φ ρ θ φ+ = − − (24)
Si ahora sustituimos la ecuación (23) dentro de la ecuación (24):
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 76
2 2 2max
2( cos sin )
0
( , , , tan )
( , , tan ( sin cos ))
r
ik i x y
x y
P k z
dxdy d f x y z x y eπ
θ ω θ θ
ρ
ω φ
θ φ θ θ − − +
+ ≤
=
= + − +∫∫ ∫ (25)
Para valores altos de k y ω , la fase de la exponencial en la ecuación (25)
varía muy rápidamente con θ , por lo que la exponencial oscila muy
rápidamente entre valores positivos y negativos. Si la función f es lo
suficientemente suave, esto conllevará una aportación despreciable a la integral
más interna sobre θ . Por tanto, la única aportación significativa a la integral
viene de los valores de θ próximos a los *θ que hacen la fase estacionaria:
( ( cos sin )) ( sin cos ) 0k x y k x yθ ω θ θ ω θ θθ∂
+ + = + − + =∂
(26)
donde 2 2k x yω≤ + . Esta ecuación tiene 2 soluciones dentro del intervalo
[0,2 )π , ambas correspondientes a la misma distancia (con signo)
( sin cos )t x yθ θ= − + a lo largo de una LOR. La distancia t se mide sobre la
proyección transaxial de la LOR, desde su punto medio. De esta forma, cada
componente frecuencial ( ),k ω recibe contribuciones principalmente de puntos
situados a una distancia fija /t k ω= − en todas las LORs del sinograma original.
La aproximación de fase estacionaria se obtiene cambiando el tercer
argumento de la ecuación (21), sin cosx yθ θ− + , por /k ω− y factorizando
posteriormente f fuera de la integral:
Proyecto Fin de Carrera José Ignacio Berdún Seijo
Reconstrucción Cuantitativa de Imágenes en un Tomógrafo PET de Alta Resolución para Animales 77
2 2 2max
2( cos sin )
0
( , , , tan ) ( , , tan ) jk j x yr
x y
kP k z dxdyf x y z d eπ
θ ω θ θ
ρ
ω φ φ θω
− − +
+ ≤
≅ −∫∫ ∫ (27)
donde el cambio axial, ( tan )k φω
− , es independiente de las coordenadas del plano
transaxial x e y , por lo que esta última ecuación se puede rescribir de una
forma más simple:
( , , , tan ) ( , , tan ,0)r rkP k z P k zω φ ω φω
≅ − (28)
La ecuación (28) constituye la base sobre la que se sustenta el algoritmo
FORE, ya que permite el rebinning de los elementos de la transformada de
Fourier bidimensional de un sinograma oblicuo con una oblicuidad tanφ y
“semirrodaja” z a los elementos de la transformada de Fourier de una
sinograma directo ( tan 0φ = ) para la rodaja tankz φω
− .
La relación equivalente en la aproximación SSRB es:
( , , , tan ) ( , , tan ,0)r rkP k z P k zω φ ω φω
≅ − (29)