Carrera de Especialización en Sistemas Embebidos...
22
Especialización en sistemas Embebidos UBA Frank Eduardo Andrés 1 Carrera de Especialización en Sistemas Embebidos Universidad de Buenos Aires UBA Materia: Gestión de Proyectos Profesor: Ariel Lutenberg Alumno: Frank Eduardo Andrés
Transcript of Carrera de Especialización en Sistemas Embebidos...
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
1
Carrera de Especialización en Sistemas Embebidos
Universidad de Buenos Aires UBA
Materia: Gestión de Proyectos Profesor: Ariel Lutenberg Alumno: Frank Eduardo Andrés
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
2
Índice:
Acta de Constitución del Proyecto ____________________________________________________________ 3
Información del Proyecto _________________________________________________________________________ 3
Propósito y Justificación del Proyecto _______________________________________________________________ 3
Descripción del Proyecto y Entregables ______________________________________________________________ 4
Requerimientos de alto nivel del proyecto ___________________________________________________________ 5
Alcance: _______________________________________________________________________________________ 5
Hipótesis y Restricciones _________________________________________________________________________ 5
Riesgos iniciales de alto nivel ______________________________________________________________________ 6
Exclusiones ____________________________________________________________________________________ 6
Lista de Interesados (stakeholders) _________________________________________________________________ 7
Requisitos de aprobación del proyecto ______________________________________________________________ 7
Asignación del Gerente de Proyecto ________________________________________________________________ 8
Aprobaciones __________________________________________________________________________________ 8
EDT: ____________________________________________________________________________________ 9
Activity on Node (AON) ___________________________________________________________________ 10
Diagrama de Gantt_______________________________________________________________________ 12
Matriz de Recursos y Materiales ____________________________________________________________ 15
Presupuesto ____________________________________________________________________________ 16
Calidad y grados de calidad: _______________________________________________________________ 17
Costos de calidad de Conformidad y de No Conformidad ________________________________________ 17
Verificación y validación __________________________________________________________________ 17
La matriz de asignación de responsabilidades _________________________________________________ 18
Los elementos que garantizan una comunicación efectiva _______________________________________ 19
Análisis de Riesgos _______________________________________________________________________ 19
Criterio de elección de proveedores _________________________________________________________ 22
Statement of Work _______________________________________________________________________ 22
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
3
Acta de Constitución del Proyecto
Controlador EMG para control Robótico
Fecha: 23/04/2015
Información del Proyecto
Empresa / Organización Universidad de Buenos Aires
Proyecto Controlador EMG para control Robótico
Fecha de preparación 24/04/2015
Cliente Ariel Lutenberg (Director de la Carrera de Especialización Sistemas Embebidos)
Patrocinador principal GETeC, (Grupo de Estudios en tecnologías de Control) - Facultad de Ingeniería - UNNE - Resistencia - Chaco
Gerente de Proyecto Frank Eduardo Andrés
Propósito y Justificación del Proyecto
Este proyecto tiene varios propósitos de los cuales en este punto se mencionaran los más relevantes. El propósito principal de este proyecto, es la aprobación de la carrera de Especialización de Sistemas Embebidos. Además se pretende donar el controlador al proyecto inter-facultad formado por los grupos de Procesamiento Digital de Bio-Señales de la Facultad de Ciencias Exactas Naturales y Agrimensura de la Provincia de Corrientes y el grupo de Estudio de tecnología de control de la Facultad de Ingeniería de la Provincia del Chaco, destinado a los estudios sobre estas señales y armado de prototipos para futuras prótesis, del que forme parte con los primeros aportes sobre el tema, dando las bases para el proyecto. Aunque los ya mencionados son los propósitos más urgentes del proyecto, el principal propósito a largo plazo del mismo como de los estudios realizados sobre estos temas, es lograr ayudar a la población de amputados del país, en lo posible con el aporte de una prótesis que pueda ser financiada por algún gobierno u empresa. Este último punto, es también la justificación del proyecto.
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
4
Descripción del Proyecto y Entregables
La Electromiografía (EMG) estudia las señales biológicas relacionadas con los músculos, las que tienen un gran campo de aplicación en el ámbito de la ingeniería biomédica y en especial en el campo de la rehabilitación. En este trabajo se pretende realizar una ampliación de un control a través de estas señales, con el objetivo de controlar un manipulador robótico, que haciendo analogías pueda ser empleado posteriormente en una prótesis ortopédica. Los inconvenientes más relevantes tienen que ver con lograr un dispositivo de control con un tamaño y peso reducido, como así también, que sea reprogramable para distintos usuarios debido a la variabilidad de dicha señal de una persona a otra. El desarrollo consiste en el diseño y la construcción de un controlador mioeléctrico con la mayor cantidad de canales de captación de EMG para el control de una articulación en un manipulador robótico antropomorfo. Se emplearan distintos programas para lograr el diseño electrónico y el circuito impreso del dispositivo, el cual contiene la adquisición y acondicionamiento de las señales EMG captadas. Posteriormente, mediante un microcontrolador, el procesamiento de la señal para determinar el movimiento correspondiente y así, actuar sobre un driver que controla el motor de la articulación del manipulador. De acuerdo a esto, los entregables del proyecto que se pretenden son:
- Captación de la mayor cantidad de señales de forma de poder controlar más de una articulación y lograr con esto que el dispositivo sea practico para la implementación en una prótesis. Circuito de Adquisición.
- Caracterización de la mayor cantidad de movimientos del cuerpo de acuerdo al conjunto de señales que se obtendrán, a través de estudios y lectura de la bibliografía existente. Tabla de caracterización de movimientos.
- Implementación de un algoritmo de robusto, teniendo en cuenta las variables de tiempo de contracción y esfuerzo muscular, con el objetivo de obtener una respuesta real. Código del Algoritmo y matriz causa efecto del mismo.
- Implementación de un algoritmo de decisión del tipo de movimiento. Código del Algoritmo y Matriz Causa efecto.
- Interface a un robot para visualizar los resultados. Video demostrativo de los resultados.
- Implementación de un programa en la PC que sirva para calibración y reconfiguración del dispositivo a través de una comunicación a definir. Entrega del programa.
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
5
Requerimientos de alto nivel del proyecto
- Lograr caracterizar bien los movimientos más sencillos para que el sistema tenga una buena aplicación práctica, para lo que se requiere poder contar con bibliografía acorde.
- Implementación de un algoritmo sencillo de rápida implementación y eficiente a la vez. Esto último implica una buena elección y para esto necesidad de contar con tiempo para pruebas anteriores a la implementación y con el capital necesario para una buena compra de electrodos utilizados para las pruebas.
- Contar con el equipamiento de laboratorio necesario: Osciloscopio, analizadores de señal, etc.
Alcance:
Aprobar la carrera de especialización de sistemas embebidos de la UBA.
Desarrollar y construir un buen sistema de captación de señal, con buen rechazo a los ruidos, realizando las pruebas del mismo a través de su visualización en osciloscopio y analizadores de señal en lo posible.
Digitalizar las señales obtenidas.
Caracterizar algunos movimientos con las señales en conjunto tanto en tiempo como en frecuencia en Matlab.
Seleccionar un algoritmo de rápida aplicación práctica para su implementación para la acción muscular correspondiente al movimiento que corresponda.
Implementar de manera integrada con microcontroladores de señales mixtas un sistema que consta de la captación realizada, caracterización de la señal, caracterización del tipo de movimiento y accionar del movimiento que corresponda de acuerdo al algoritmo seleccionado a través de un manipulador robótico.
Desarrollo de una interface gráfica sencilla en la pese para la calibración del instrumento de acuerdo al usuario o al uso que se le dé al mismo. Los parámetros a considerar en este punto quedan a definir de acuerdo a los avances y complicaciones que se tengan.
Hipótesis y Restricciones
Las hipótesis supuestas para lograr con el cumplimiento del proyecto en plazo, costo y calidad previstos según el alcance son: I. No tener mayores inconvenientes en la captación de la señal, salvo por algunas
mejoras de filtros, ya que la misma se realizó con anterioridad, para estudios pasados de las señales.
II. Se espera un buen funcionamiento de los electrodos y cables ya implementados anteriormente o similares.
III. Que los movimientos sencillos sean fácilmente identificable tanto en características
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
6
de tiempo como de frecuencia. IV. No tener restricciones para conseguir los componentes necesarios ya que la gran
mayoría se poseen. V. Contar con la gran mayoría del tiempo libre, fin de semanas y días festivos para
poder llevar adelante los avances necesarios para la terminación del trabajo. Se tendrá en cuanta como días laborables los fines de semanas y feriados excepto cuando se subcontraten determinadas tareas, como ejemplo fabricación de placa impresa.
Restricciones: I. Escases de elementos necesarios para ensayos. II. Utilización de recursos limitados para la compra de materiales. III. Tiempo acotado para llevar adelante las tareas u coordinación de las mismas por
temas de trabajos y posibles viajes de trabajo.
Riesgos iniciales de alto nivel
Lesiones Físicas por conexión a la parte de potencia del robot. Problemas de Importaciones (teniendo en cuanta principalmente la compra inesperada de posibles repuestos de microcontroladores). Incidentes con Cortos circuitos en Micros y demás. Importante cambiario del dólar Atraso en la entrega de Placa
Exclusiones
Quedan excluido del alcance del proyecto los siguientes puntos para tratarse en futuros proyectos o temas de investigación:
- Un estudio completo de caracterización de movimientos. - Armado de un prototipo de prótesis. - Estudios de caracterización y ensayos con personas amputadas. - Implementación de una algoritmo inteligente para detectar el movimiento que
corresponde y aprensa sobre sus errores, como ser redes neuronales, lógica difusa o algoritmos genéticos.
- Implementación de un sistema de calibración automático para adaptación al usuario. - Estudios, ensayos e implementación de electrodos más robustos para su futuro uso
en prótesis. - Formación de una base de datos de acceso gratuito por web, con las señales y
movimientos caracterizados, con el objetivo de hacer contacto y participar con grupos de investigación que tratan los mismos temas de estudio y poder lograr concretar algo que ayude a la población de amputados.
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
7
Lista de Interesados (stakeholders)
Los interesados que se pudieron identificar en el presente proyecto son:
Cliente: Ariel Lutenberg (Director de la Carrera de Especialización Sistemas Embebidos), quien
aprobara el trabajo para la obtención del título especialista en sistemas embebidos.
Sponsor:
- Frank Eduardo Andrés: el que suscribe e interesado en la obtención del título de pos grado
especialista en sistemas embebidos.
- Grupos de investigación inter facultad de la UNNE (Universidad Nacional del Nordeste), donde
participan el grupo de Procesamiento digital de señales de la facultad de ciencias exactas
naturales y agrimensura de la provincia de Corrientes, departamento de ingeniería electrónica
y Grupo de Estudio de Tecnologías de Control (GETeC) de la facultad de ingeniería
electromecánica de la UNNE, provincia del chaco. Este grupo multidisciplinario actualmente
realiza investigaciones en el tema. Son interesados ya que se pretende que el dispositivo les
sirva de uso para realizar pruebas de los avances que tengan ya sea desde lo mecánico como
del estudio de las señales del cuerpo.
Project manager: Frank Eduardo Andrés.
Drivers: Grupos de investigación inter facultad de la UNNE, ya que participaran para definir los
objetivos del proyecto.
Team members: Frank Eduardo Andrés, con colaboración de Grupos de investigación inter facultad
de la UNNE. También contratistas en el caso de ser necesario como sería el caso de armado de
placas.
End-User: Población de personas amputadas que se puede ver beneficiada a futuro con avances en
este campo a través de una prótesis, o beneficiadas medianamente con un dispositivo con el que
puedan al menos estimular los músculos que ya no ocupan.
Requisitos de aprobación del proyecto
Cumplir con el alcance del proyecto, entregando los diferentes entregables en tiempo y forma de acuerdo a la programación a establecer.
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
8
Asignación del Gerente de Proyecto
Nombre Cargo Departamento / División
Eduardo Andrés Frank
Alumno Carrera de Sistemas
Embebidos
Aprobaciones
Patrocinador Fecha Firma
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
9
EDT:
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
10
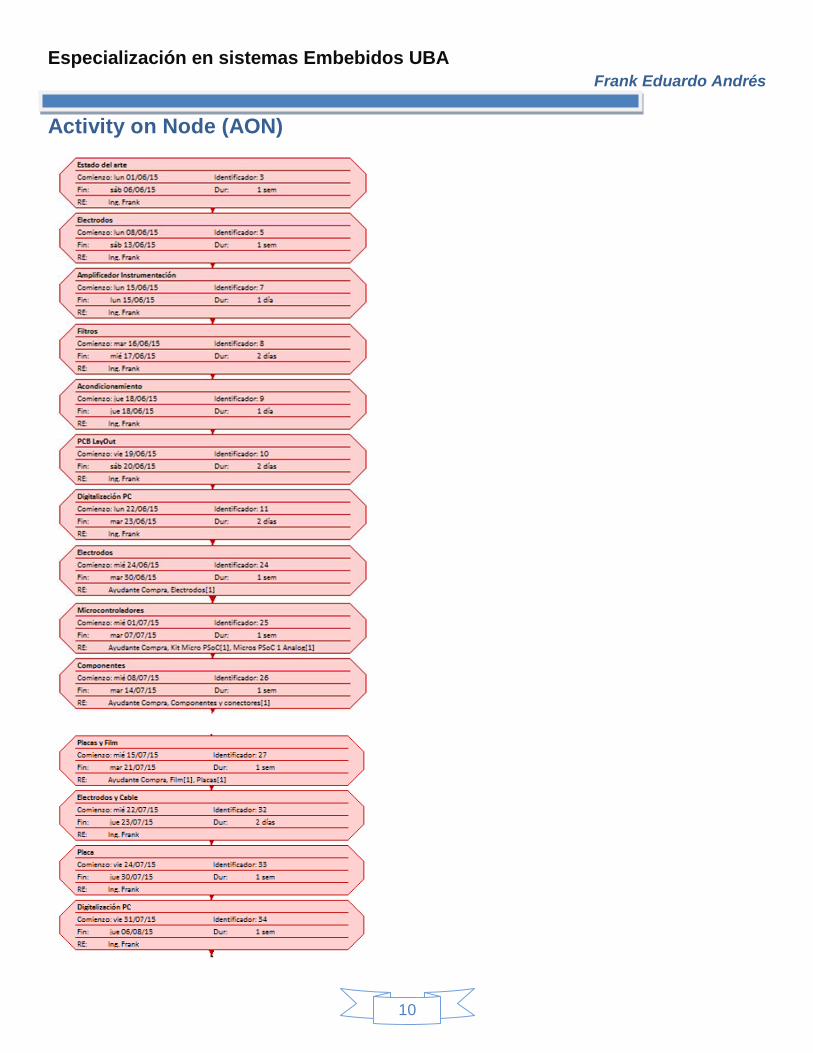
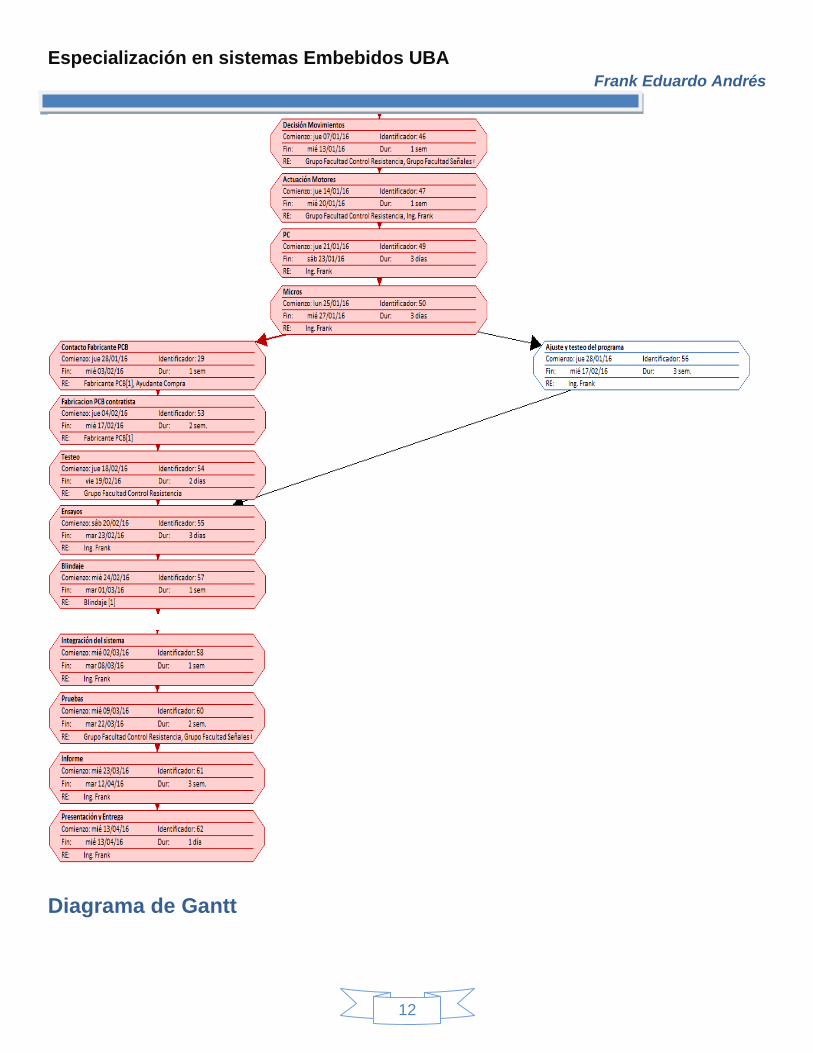
Activity on Node (AON)
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
11
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
12
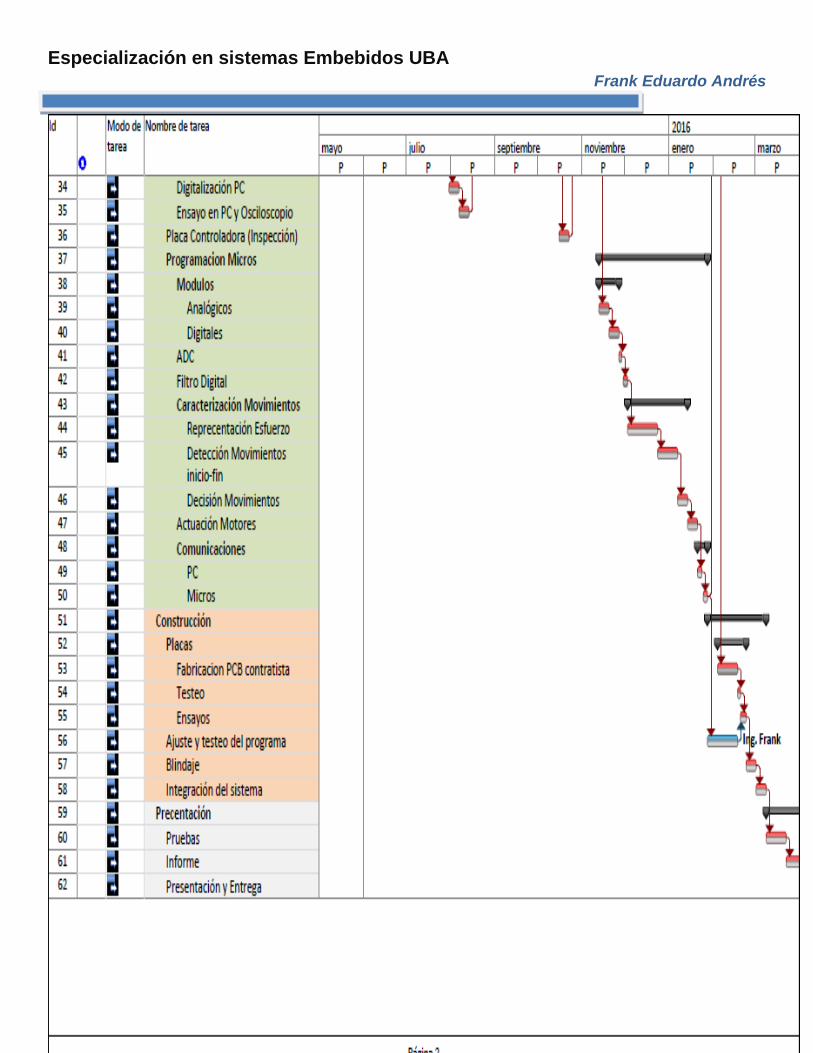
Diagrama de Gantt

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
13
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
14
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
15
Matriz de Recursos y Materiales
Nombre de tarea Duración Comienzo Fin Nombres de los recursos y materiales
Controlador EMG 273 días lun 01/06/15 mié 13/04/16
Ingeniería 142 días lun 01/06/15 jue 12/11/15
Estado del arte 1 sem lun 01/06/15 sáb 06/06/15 Ing. Frank
Circuito Adquisición 14 días lun 08/06/15 mar 23/06/15
Electrodos 1 sem lun 08/06/15 sáb 13/06/15 Ing. Frank
Esquematico 4 días lun 15/06/15 jue 18/06/15
Amplificador Instrumentación 1 día lun 15/06/15 lun 15/06/15 Ing. Frank
Filtros 2 días mar 16/06/15 mié 17/06/15 Ing. Frank
Acondicionamiento 1 día jue 18/06/15 jue 18/06/15 Ing. Frank
PCB LayOut 2 días vie 19/06/15 sáb 20/06/15 Ing. Frank
Digitalización PC 2 días lun 22/06/15 mar 23/06/15 Ing. Frank
Preocesamiento de señal 48 días vie 14/08/15 jue 08/10/15
Caracterización Movimientos T-F 1 ms vie 14/08/15 jue 10/09/15 Grupo Facultad Señales Corrientes,Ing. Frank
Reprecentación Esfuerzo Muscular 2 sem. vie 11/09/15 jue 24/09/15 Grupo Facultad Señales Corrientes,Ing. Frank
Detección Inicio y Fin del Movimiento 2 sem. vie 25/09/15 jue 08/10/15 Grupo Facultad Señales Corrientes,Ing. Frank
Herramientas (estidio) 30 días vie 09/10/15 jue 12/11/15
PSoC 1 sem vie 09/10/15 jue 15/10/15 Ing. Frank
Drivers Motores 2 días vie 16/10/15 sáb 17/10/15 Grupo Facultad Control Resistencia
Comunicación 12 días vie 23/10/15 jue 05/11/15
PC 1 sem vie 23/10/15 jue 29/10/15 Grupo Facultad Control Resistencia,Ing. Frank
Micros 1 sem vie 30/10/15 jue 05/11/15 Grupo Facultad Control Resistencia,Ing. Frank
Programa Calibración en PC 1 sem vie 06/11/15 jue 12/11/15 Ing. Frank
Suministros 193 días mié 24/06/15 mié 03/02/16
Electrodos 1 sem mié 24/06/15 mar 30/06/15 Ayudante Compra,Electrodos[1]
Microcontroladores 1 sem mié 01/07/15 mar 07/07/15 Ayudante Compra,Kit Micro PSoC[1],Micros PSoC 1 Analog[1]
Componentes 1 sem mié 08/07/15 mar 14/07/15 Ayudante Compra,Componentes y conectores[1]
Placas y Film 1 sem mié 15/07/15 mar 21/07/15 Ayudante Compra,Film[1],Placas[1]
Robot 1 sem vie 09/10/15 jue 15/10/15 Grupo Facultad Control Resistencia
Contacto Fabricante PCB 1 sem jue 28/01/16 mié 03/02/16 Fabricante PCB[1],Ayudante Compra
Prototipo 163 días mié 22/07/15 mié 27/01/16
Circuito Adquisición 20 días mié 22/07/15 jue 13/08/15
Electrodos y Cable 2 días mié 22/07/15 jue 23/07/15 Ing. Frank
Placa 1 sem vie 24/07/15 jue 30/07/15 Ing. Frank
Digitalización PC 1 sem vie 31/07/15 jue 06/08/15 Ing. Frank
Ensayo en PC y Osciloscopio 1 sem vie 07/08/15 jue 13/08/15 Ing. Frank
Placa Controladora (Inspección) 1 sem vie 16/10/15 jue 22/10/15 Ing. Frank
Programacion Micros 65 días vie 13/11/15 mié 27/01/16
Modulos 12 días vie 13/11/15 jue 26/11/15
Analógicos 1 sem vie 13/11/15 jue 19/11/15 Ing. Frank
Digitales 1 sem vie 20/11/15 jue 26/11/15 Ing. Frank
ADC 2 días vie 27/11/15 sáb 28/11/15 Ing. Frank
Filtro Digital 3 días lun 30/11/15 mié 02/12/15 Ing. Frank
Caracterización Movimientos 36 días jue 03/12/15 mié 13/01/16
Reprecentación Esfuerzo 3 sem. jue 03/12/15 mié 23/12/15Grupo Facultad Control Resistencia,Grupo Facultad Señales
Corrientes,Ing. Frank
Detección Movimientos inicio-fin 2 sem. jue 24/12/15 mié 06/01/16Grupo Facultad Control Resistencia,Grupo Facultad Señales
Corrientes,Ing. Frank
Decisión Movimientos 1 sem jue 07/01/16 mié 13/01/16Grupo Facultad Control Resistencia,Grupo Facultad Señales
Corrientes,Ing. Frank
Actuación Motores 1 sem jue 14/01/16 mié 20/01/16 Grupo Facultad Control Resistencia,Ing. Frank
Comunicaciones 6 días jue 21/01/16 mié 27/01/16
PC 3 días jue 21/01/16 sáb 23/01/16 Ing. Frank
Micros 3 días lun 25/01/16 mié 27/01/16 Ing. Frank
Construcción 35 días jue 28/01/16 mar 08/03/16
Placas 17 días jue 04/02/16 mar 23/02/16
Fabricacion PCB contratista 2 sem. jue 04/02/16 mié 17/02/16 Fabricante PCB[1]
Testeo 2 días jue 18/02/16 vie 19/02/16 Grupo Facultad Control Resistencia
Ensayos 3 días sáb 20/02/16 mar 23/02/16 Ing. Frank
Ajuste y testeo del programa 3 sem. jue 28/01/16 mié 17/02/16 Ing. Frank
Blindaje 1 sem mié 24/02/16 mar 01/03/16 Blindaje [1]
Integración del sistema 1 sem mié 02/03/16 mar 08/03/16 Ing. Frank
Precentación 31 días mié 09/03/16 mié 13/04/16
Pruebas 2 sem. mié 09/03/16 mar 22/03/16Grupo Facultad Control Resistencia,Grupo Facultad Señales
Corrientes,Ing. Frank
Informe 3 sem. mié 23/03/16 mar 12/04/16 Ing. Frank
Presentación y Entrega 1 día mié 13/04/16 mié 13/04/16 Ing. Frank
Matriz de Recursos y Materiales
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
16
Presupuesto
Costo Año Trimestre
2015 Total 2015 2016 Total 2016 Total General
Tipo Recursos T2 T3 T4 T1 T2
Trabajo Sin asignar 0 0 0 0 0 0 0 0
Ing. Frank 3600 11520 13680 28800 12960 1620 14580 43380
Ayudante Compra 1400 1960 0 3360 840 0 840 4200
Grupo Facultad Control Resistencia 0 0 9000 9000 6200 0 6200 15200
Grupo Facultad Señales Corrientes 0 8800 5800 14600 4600 0 4600 19200
Total Trabajo 5000 22280 28480 55760 24600 1620 26220 81980
Material Kit Micro PSoC 1466,666667 733,3333333 0 2200 0 0 0 2200
Electrodos 300 0 0 300 0 0 0 300
Placas 0 300 0 300 0 0 0 300
Film 0 200 0 200 0 0 0 200
Micros PSoC 1 Analog 1000 500 0 1500 0 0 0 1500
Componentes y conectores 0 2000 0 2000 0 0 0 2000
Fabricante PCB 0 0 0 0 2000 0 2000 2000
Blindaje 0 0 0 0 500 0 500 500
Suministros 109,8901099 285,7142857 278,3882784 673,992674 293,040293 32,96703297 326,007326 1000
Total Material 2876,556777 4019,047619 278,3882784 7173,992674 2793,040293 32,96703297 2826,007326 10000
Total General 7876,556777 26299,04762 28758,38828 62933,99267 27393,04029 1652,967033 29046,00733 91980
Según esto la curva S del proyecto nos queda:
0
10000
20000
30000
40000
50000
60000
70000
80000
90000
100000
Semana22
Semana26
Semana30
Semana34
Semana38
Semana42
Semana46
Semana50
Semana1
Semana5
Semana9
Semana13
T2 T3 T4 T1 T2
2015 2016
Co
sto
Informe del flujo de caja
Total
Semanal
Costo acumulado
Tareas
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
17
Calidad y grados de calidad:
Calidad: La calidad es el nivel en que un conjunto de características satisface los requerimientos. Según esto en este
proyecto la calidad estaría dada por:
Para los requerimientos de lograr caracterizar bien los movimientos del cuerpo las características a satisfacer son:
- Lograr una buena captación de señal con una buena calidad señal a ruido.
- Que el algoritmo sea eficiente para la detección de movimientos precisos del miembro superior.
Para los requerimientos de que es dispositivo controlador pueda ser implementado a futuro como un control de una
prótesis del miembro superior o como el punto de partida del diseño de una, las características a satisfacer son:
- Obtener una buena autonomía del dispositivo.
- Lograr un dispositivo lo más pequeño y compacto posible.
A futuro si en conjunto con organismos y centros de investigación se puede llegar a sacar al mercado una prótesis del
miembro superior, esta deberá de cumplir seguramente requerimientos obligatorios de calidad de parte de la ISO y aún
más importante normativas de la ANMAT.
Grado de Calidad: El grado de calidad indica las diferencias entre productos o servicios con el mismo uso funcional.
Según esto, como aún no existe en el mercado una prótesis Electro Miograficas patentada o a la venta y menos aún su
controlador por separado, no puedo realizar la comparación del grado de calidad y más aún porque este proyecto se
encuentra en etapa de investigación y experimental.
Costos de calidad de Conformidad y de No Conformidad
Costos de Conformidad: Dentro de los costos para evitar errores tengo:
- Consulta y delegación de tareas a grupos de investigación.
- Contratación del fabricante del PCB.
- Gastos en compra de electrodos de buena calidad.
- Entrenamiento previo de la tecnología a implementar.
- Realización de ensayos sobre el manipulador robótico.
Costos de no conformidad: Los gastos asociados a no llegar a cumplir los requerimientos en este proyecto se ve
reflejado en el tiempo invertido en el sin llegar al objetivo propuesto y llegado al caso también en la no aprobación del
trabajo final de la carrera de especialización de sistemas embebidos.
Verificación y validación
Verificación: Las características que se pueden ir verificando a lo largo del proyecto para asegurar que las especificaciones de los requerimientos serán las esperadas o cercanas a lo esperado, son:
- Calidad de la señal respecto al ruido. - Reconocimiento del esfuerzo muscular de determinados movimientos. - Correcta comunicación con la PC y el manipulador robótico. - Correcto funcionamiento de los parámetros de calibración del controlador.
Ariel Lutenberg
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
18
Validación: Las evaluaciones y ensayos que se pueden realizar sobre el controlador ya terminado o primeras versiones del mismo son:
- Correcto funcionamiento del controlador a través del robot, independientemente del usuario que lo utilice. - Correcto funcionamiento de la interface de calibración y configuración automática.
La matriz de asignación de responsabilidades
Controlador EMG Ing. Frank Grupo Facultad Señales Corrientes Grupo Facultad Control Resistencia Ayudante Compra Fabricante PCB
Ingeniería
Estado del arte R
Circuito Adquisición
Electrodos R
Esquematico
Amplificador Instrumentación R
Filtros R
Acondicionamiento R
PCB LayOut R
Digitalización PC R
Preocesamiento de señal
Caracterización Movimientos T-F R-A R
Reprecentación Esfuerzo Muscular R-A R
Detección Inicio y Fin del Movimiento R-A C
Herramientas (estidio)
PSoC R
Drivers Motores R-A R
Comunicación
PC R-A R
Micros R C
Programa Calibración en PC R
Suministros
Electrodos R-A R
Microcontroladores R-A R
Componentes R-A R
Placas y Film R-A R
Robot R-A R
Contacto Fabricante PCB R-A R
Prototipo
Circuito Adquisición
Electrodos y Cable R
Placa R
Digitalización PC R
Ensayo en PC y Osciloscopio R
Placa Controladora (Inspección) R
Programacion Micros
Modulos
Analógicos R
Digitales R
ADC R
Filtro Digital R
Caracterización Movimientos
Reprecentación Esfuerzo A-R C C
Detección Movimientos inicio-fin A-R C C
Decisión Movimientos A-R C C
Actuación Motores R-A R
Comunicaciones
PC R
Micros R
Construcción
Placas
Fabricacion PCB contratista R-A R
Testeo R-A R
Ensayos R
Ajuste y testeo del programa R
Blindaje R
Integración del sistema R
Precentación
Pruebas R-A C R
Informe R
Presentación y Entrega R
R = Responsable A = A cargo C = ConsultadoMatriz de responsabilidades
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
19
Los elementos que garantizan una comunicación efectiva
Los elementos que garantizan una comunicación efectiva en el caso de mi proyecto final de carrera, son:
- Establecer los temas y los participantes de la reunión.
- Realizar una buena minuta de reunión incluyendo los temas pendientes de las anteriores y los
requerimientos para la próxima.
- Ajustar las reuniones según los tiempos de los participantes del proyecto.
- Las comunicaciones por Mails deben ser claras y concisas, respondiendo directamente las consultas y
cuestiones.
- Lograr el objetivo de poder realizar reuniones por teleconferencias por temas de distancias y que la mayor
cantidad de los participantes puedan asistir.
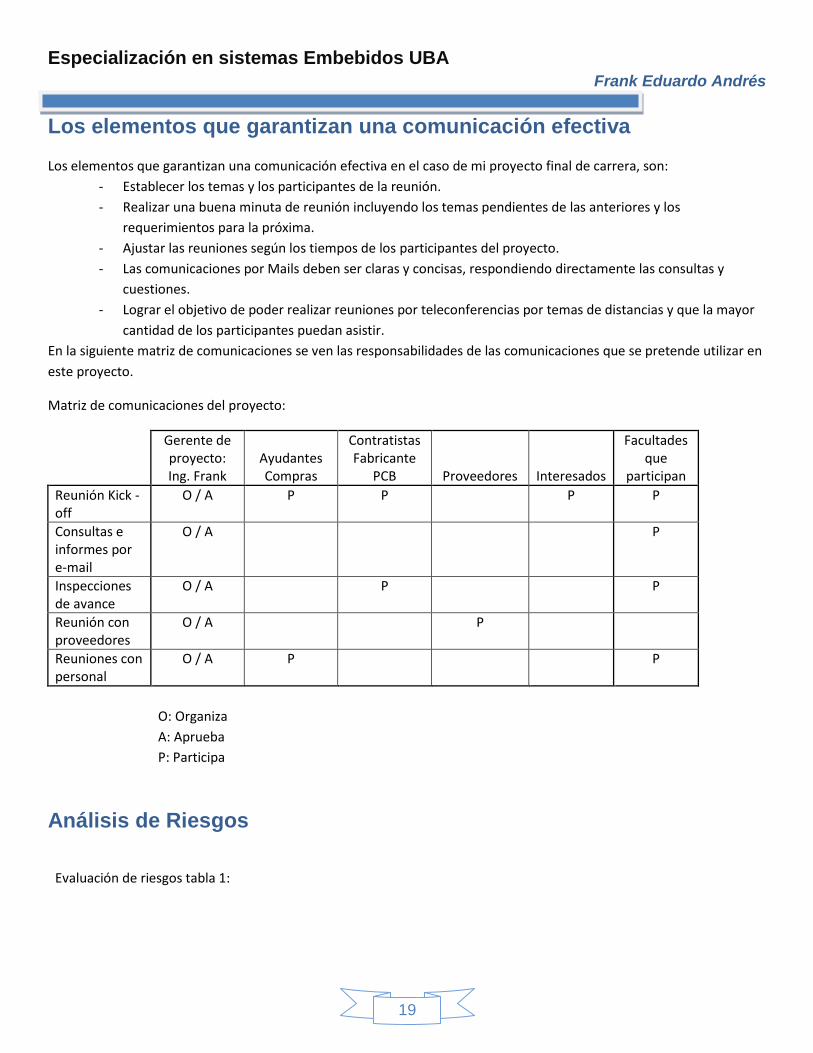
En la siguiente matriz de comunicaciones se ven las responsabilidades de las comunicaciones que se pretende utilizar en
este proyecto.
Matriz de comunicaciones del proyecto:
Gerente de proyecto: Ing. Frank
Ayudantes Compras
Contratistas Fabricante
PCB Proveedores Interesados
Facultades que
participan
Reunión Kick - off
O / A P P P P
Consultas e informes por e-mail
O / A P
Inspecciones de avance
O / A P P
Reunión con proveedores
O / A P
Reuniones con personal
O / A P P
O: Organiza
A: Aprueba
P: Participa
Análisis de Riesgos
Evaluación de riesgos tabla 1:
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
20
Costo Plazo Alcance/Calidad
Debe lograrse X
Conviene lograrlo
X
Acepto resultado X
Evaluación de riesgos tabla 2:
P: Probabilidad
It: Incidencia en Pazo
I$: Incidencia en costos
Ic: En Calidad
Riesgos P It I$ Ic P x It P x I$ P x Ic
Lesiones por conexión a la parte de potencia del robot 0,2 0,8 0,8 0,5 0,16 0,16 0,1
Problemas de Importaciones (teniendo en cuanta principalmente la compra inesperada de posibles repuestos de microcontroladores). 0,6 0,8 0,5 0,1 0,48 0,3 0,06
Incidentes con Cortos circuitos en Micros y demás 0,4 0,6 0,6 0,3 0,24 0,24 0,12
Importante salto cambiario del dólar 0,6 0,3 0,6 0,3 0,18 0,36 0,18
Atraso en la entrega de Placa 0,3 0,5 0,3 0,1 0,15 0,09 0,03
Riesgo Alto
Se considera Riesgo alto los que dan un Valor del Riesgo: VR = P * I > 0,40.
Plan de respuesta a los principales riesgos:
Ariel Lutenberg

Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
21
PLAN DE RESPUESTA AL RIESGO ALTO:
Fecha de Registro:
Nombre del Riesgo: Problemas de Importaciones
Elemento de la WBS: Suministros – Microcontroladores
Responsable: Gerente de Proyecto (Ing. Frank Eduardo Andrés)
Descripción del Riesgo, incluyendo categoría del riesgo (técnico, externo, etc.) •Gestión, compra, recepción e inspección de los microcontroladores.
•Es un tipo de riesgo de suministros
•El riesgo que se corre es grave en plazo, por las grandes restricciones a la importación en el país y sobre todo en este tipo de industria.
Resultados del Análisis Cualitativo del Riesgo: estado del plan actual _Probabilidad de ocurrencia (de 0,1 a 0,9): 0,6
_Impacto en Objetivos (de 0,1 a 0,9) :
Plazo: 0,8
Costo: 0,5
Técnico: 0,1
Calificación del Riesgo en la Matriz Probabilidad - Impacto •Calificación en Plazo: Bajo (0.48)
•Calificación en Costo: Alto (0.3)
•Calificación Técnico: Bajo (0.06)
Acciones a tomar de mitigación del riesgo: Para mitigar el riesgo las acciones que se toman son:
1°) Buscar alternativas de importación a través del merco sur por Brasil, en donde se tienen contactos en una pymes. (Para reducir el
impacto). (Se aclara que ya se realizó la operación de importaciones a través de esta empresa posteriormente sin tener inconvenientes
un año atrás, pero la misma requiere de tiempos mayores de traslado por correo interno en Brasil, siendo también mayores los costos
del traslado). Factor de reducción del impacto: 0,8
2°) Se realizaran ensayos de inspección de conexiones antes de cada actividad, por medio del seguimiento de una planilla, buscando
no saltear pasos de inspección. Con esto se busca reducir la probabilidad del riesgo evitando compra de repuestos. (Se aclara que ya se
posee los microcontroladores que se pretenden utilizar, pero con solo un repuesto por fallos y son los que darían mayor trabas en
importarlos por la experiencia que se tuvo en la compra posterior de los mismos). Factor de reducción de impacto: 0,7
Probabilidad-Impacto del Riesgo (Después de su mitigación) _Probabilidad de ocurrencia (de 0,1 a 0,9): 0,7 * 0,6 = 0,42
_Impacto en Objetivos (de 0,1 a 0,9): 0,8 * impacto que corresponda:
Plazo: 0,64
Costo: 0,4
Técnico: 0,08
Calificación del Riesgo en la Matriz Probabilidad – Impacto (Después de su mitigación) •Calificación en Plazo: Bajo (0.27)
•Calificación en Costo: Medio (0.17)
•Calificación Técnico: Bajo (0.034)
Ariel Lutenberg
Especialización en sistemas Embebidos UBA
Frank Eduardo Andrés
22
Criterio de elección de proveedores
Los criterios para elección del proveedor del Micro Controlador en este proyecto fue casi de manera directa, ya que es
uno de los únicos que satisface los requerimientos que pretendo en el proyecto que son:
- Contar con módulos analógicos como digitales configurables integrados en un solo chip, para lograr que el
dispositivo sea lo más pequeño y autónomo posible.
- Contar con algo de entrenamiento previo con el IDE de la marca.
- Disponibilidad de Stock propio
- Contar con contactos para importación de repuestos.
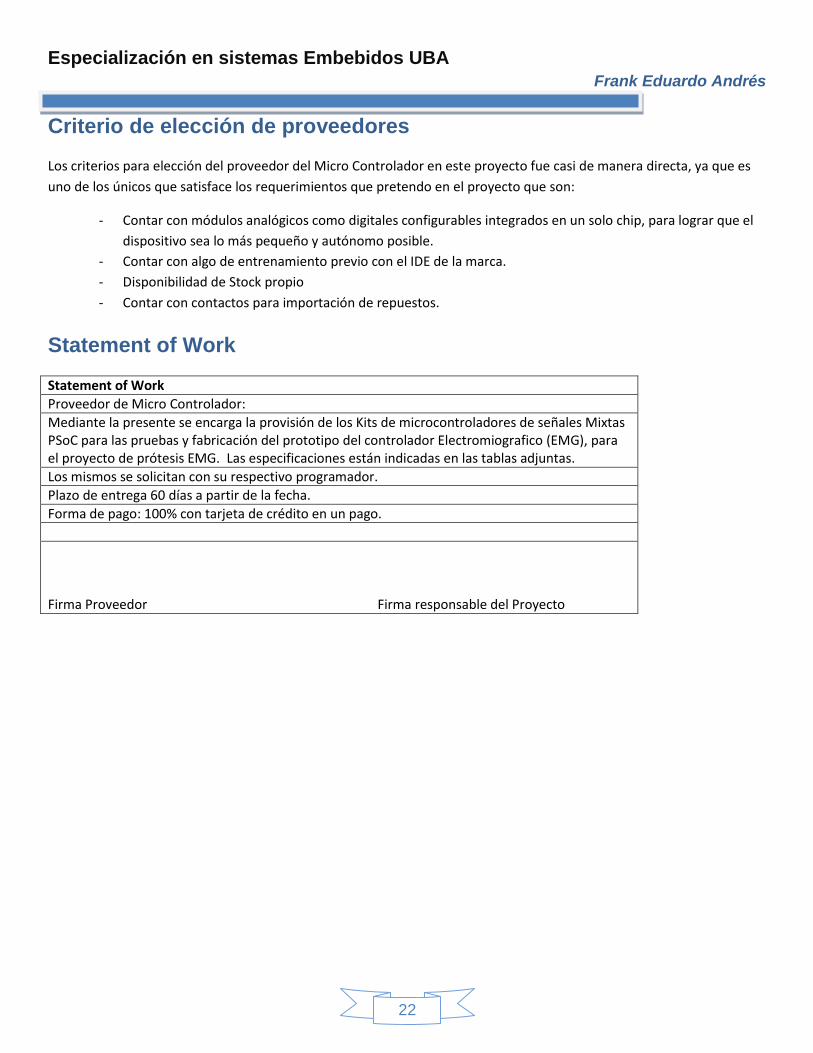
Statement of Work
Statement of Work
Proveedor de Micro Controlador:
Mediante la presente se encarga la provisión de los Kits de microcontroladores de señales Mixtas PSoC para las pruebas y fabricación del prototipo del controlador Electromiografico (EMG), para el proyecto de prótesis EMG. Las especificaciones están indicadas en las tablas adjuntas.
Los mismos se solicitan con su respectivo programador.
Plazo de entrega 60 días a partir de la fecha.
Forma de pago: 100% con tarjeta de crédito en un pago.
Firma Proveedor Firma responsable del Proyecto
Ariel Lutenberg