
CENTRO NACIONAL DE INVESTIGACIÓN Y … · Análisis de diferentes técnicas de control de...
102
S.E.P. S.E.I.T. D.G.I.T. CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO cenidet ESTUDIO DE ALTERNATIVAS DE PARA APLICACIONES EN SISTEMAS DE ILUMINACIÓN COMUNICACI~N INALÁMBRICA T E S I S QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN INGENIERIA ELECTRONICA P R E S E N T A : JOSE CRUZ NUÑEZ PEREZ DIRECTORES DE TESIS. DR. HUGO CALLEJA GJUMLICH DR. JAIME ARAU ROFFIEL 09-0623 CUERNAVACA, MORELOS DICIEMBRE 2003
-
Upload
dinhnguyet -
Category
Documents
-
view
223 -
download
0
Transcript of CENTRO NACIONAL DE INVESTIGACIÓN Y … · Análisis de diferentes técnicas de control de...
S.E.P. S.E.I.T. D.G.I.T.
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO
cenidet ESTUDIO DE ALTERNATIVAS DE
PARA APLICACIONES EN SISTEMAS DE ILUMINACIÓN
COMUNICACI~N INALÁMBRICA
T E S I S Q U E P A R A O B T E N E R E L G R A D O D E M A E S T R O E N C I E N C I A S E N I N G E N I E R I A E L E C T R O N I C A
P R E S E N T A :
J O S E C R U Z N U Ñ E Z P E R E Z
DIRECTORES DE TESIS. DR. HUGO CALLEJA GJUMLICH
DR. JAIME ARAU ROFFIEL
0 9 - 0 6 2 3 CUERNAVACA, MORELOS DICIEMBRE 2003
S.E.P. S.E.1.T S.N.1.T
CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO cenidet
ACADEMIA DE LA MAESTRÍA EN ELECTRÓNICA
FORMA R l l
ACEPTACION DEL TRABAJO DE TESIS
Cuernavaca, Mor.
Dr. Jesús Arnoldo Bautista Corral Director del CENIDET Presente
At'n. Dr. Enrique Quintero Mármol Jefe del Depto. de Ingeniería Electrónica
Después de haber revisado el trabajo de tesis titulado: "Estudio de Alternativas de Comunicación Inalámbricas para Aplicaciones en Sistemas de Iluminación", elaborado por el alumno Jose Cruz Núñez Perez, bajo la dirección de la Dr. Iorge Hugo Calleja Gjumlich y del Dr. Jaime E. Arau Roffiel, el trabajo presentado se ACEPTA para proceder a su impresión.
A T E N T A M E N T E
- . L.'Montaño S. E. P.
CENTRO NACIONAL DE INVESTICPCION
Y DESARROLLO TECNOLOJ'.YO
DrpTn. n F FI F'-RüN!i:A C.C.P.: Dr. Jaime E. Arau Rome1 / Subdiredor Académico Dr. Gerard0 V. Guerrero Ramirez/ Pdte. de la Academia de Electrónica Lic. Olivia Maquinay Díaz / Jefe del Depto. de Servicios Escolares Expediente.
Ing. José Cruz Núñez Perez Candidato al grado de Maestro en Ciencias en Ing. Electrónica P r e s e n t e
Cuernavaca, Mor., a 14 de noviembre del 2003.
Después de haber sometido a revisión su trabajo final de tesis titulado: "Estudio de Alternativas de Comunicación Inalámbricas para Aplicaciones en Sistemas de Iluminación", y habiendo cumplido con todas las indicaciones que el jurado revisor de tesis le hizo, comunico que se le concede autorización para que proceda a la impresión de la misma, como requisito para la obtención del grado.
Reciba un cordial saludo.
A t e n t a m e n t e
.-
Jefe del Depto. de Electrónica
C.C.P. Expediente
Interior Internado Palmira SIN. Col. Palmira. C.P. 62490, Cuernavaca, Morelos - México Apartado Postal No. 5-164, Cuernavaca 62050, Mor., Mexico Tels. y Fax: (7) 3-12-23-14. 3-18-77-41, 3-12-24-34 Dr. Enrique Quintero-Mármol Má Je nto de Electrónica
. ~ A n a i L ~ m n i d d & l n x
ACCrearlOr ZrnivmaL. ~ e h á CEOS por toda Iás 6endiciones que me tía concedido Por proporcionarme h@erza necesaria para alcanzar mis metas Por darme 1a vida y por estar siempre conmigo
g mis c%iires: J. por creer en mi, por darme su amor, sus conrqos y ese apoyo incondtcionalen todo momento por ha6er inculcado en míeldeseo de superación Porformar una familta en 1a que no me f a b a nada y a 1a cwlb de60 La6erme convertido en 1a persona que soy
y @em.ardina
g mis hiermanos: Francisco, Nna y Juan iMií compañeros y amigos, por todos los feltces momentos que fiemos vivido juntos por serpara mi un motivo de orgullo Por eCánimo que siempre me contagian
mis a6uebs: Juan, irme, Francisco y %hr @‘orsus consqos que recordaré toda mi vida por ser un gran qemplo

&padecimientos
gCm. Hugo ~ah,m, por compartir conmQo su conocimiento y su aprecia6h tiempo durante eldesarrollo de esta tesis
gC m, Jaime grau, h agradezco sinceramente su orientación y apoyo para realtzar este tra6ajo
gCcomité aé v r x m. CarlOsgguiLz~ m. %ario %me y %.c. Joségntonw %yo, por su d+osición en h revisión dé este tra6ajo y por sus comentarios y sugerencias que contri6uyeron a mejorarlo
gCm. Mario %me y aCm. Javier C m a , por facilttar h adquisición de equipo necesario para h imphmentación delsistema desarroháo
toah q u e h personas que hicieron posi6h h realización dé este tra6ajo dé tesis Y a los que me ahntaron a continuar mis estudios, en especiala mis tíos.
gCconsqo N&naCdé ( h c i a y ?ecnoGyíia CoNgCW, a Gz 9B.P y a llU%a por 6rindanne su apoyo económico como 6ecari0, para eldesarroh de mis estudios
JCmmq por hs faciltdadés otoyadas para realtzar h maestría
mk tompatiems aé g e n e r d n , por h amistadque me ofrecieron durante mi estancia en Cuenavaca
mk amigospor ser tan incondtcionahs en su a m i s t d y apoyo
Finalmente agradezco a Iar mujeres que me entregaron su corazón y su amor ...
Tabla de contenido
Lista de figuras
Lista de tablas
Resumen
CAPITULO I. Introducción
I. 1. Planteamiento del problema I. 1.1. Antecedentes 1.1.2. Justificación
1.2. Marco conceptual y revisión del estado del arte 1.2.1. Métodos para un ahorro de energía eléctrica en la iluminación 1.2.2. Análisis de diferentes técnicas de control de iluminación usadas
para fines similares 1.2.2.1. Sistemas de control comerciales 1.2.2.2. Otros sistemas de control de iluminación
1.2.3. Medios de transmisión 1.2.3.1. Sistemas con medio de transmisión inalámbrica
1.2.4. Protocolos de comunicación y del sistema 1.3. Objetivos generales y particulares 1.4. Sistema propuesto 1.5. Aportación o contribución del trabajo
iv
vi
vii
1-1
1-1 1-1 1-3 1-4 1-4
1-5 1-5 1-6 1-7 1-9 1-10 1-11 1-11 1-13
CAPITULO 11. Normatividad del prototipo de comunicación por RF 2-1
Ii. 1. Revisión de la normatividad existente 2-1 II. 1.1. Normas mexicanas 2-4 II.1.2. Normas internacionales 2-5
2-9 Ii.2. Análisis de los circuitos integrados disponibles para resolver la aplicación Ii.3. Prototipo de comunicación 2-10
i
CAPITULO 111. Desarrollo del hardware
IIi. 1. Introducción m.2. Interfaz entre la PC y la tarjeta transmisora IiI.3. Balastros
IIi.3.1. Balastro 1 IiI.3.2. Balastro 2
iiI.4.1. Generador del voltaje de control para el balastro OSRAM IIi.4.2. Circuito de acondicionamiento para el balastro de HID ilI.4.3. Circuito de encendido y apagado de los balastros
Ií1.5. Selección del microcontrolador IíI.6. Interfaz entre la tarjeta receptora y el microcontrolador IiI.7. Diagramas de conexión de circuitos
III.4. Adaptación al balastro
3-1
CAPITULO IV. Desarrollo del software
IV.l. Introducción N.2 . Integridad de la información
IV.3. Comparación y selección del protocolo de comunicación N.2.1. Detección de errores
IV.3.1. N.3.2.
Diseño del protocolo de comunicación Otras características del protocolo de comunicación
IV.4. Descripción del software en el transmisor IV.5. Descripción del software en el receptor
3-1 3-2 3-2 3-3 3-4 3-4 3-5 3-1 3-8 3-9 3-10 3-1 1
4-1
4-1 4-3 4-3 4-1 4-9 4-11 4-14 4-15
CAPITULO V. Pruebas y resultados 5-1
V.1. Pruebas de operación realizadas al sistema 5-1 V. 1.1. Verificación del protocolo de comunicación 5-1 V.1.2. Control de operación por RF del balastro fluorescente OSRAM 5-2 V.1.3. 5-3 V.1.4. Alcance de transmisión del sistema 5-4
V.2. Comparación del sistema desarrollado con otros sistemas equivalentes 5-6
Control de operación por RF del balastro de HID
CAPITULO VI. Conclusiones y trabajos futuros 6-1 I
1 VI. 1. Conclusiones generales 6-1 V1.2. Comentarios y recomendaciones para trabajos posteriores 6-4
ii
APÉNDICES Apéndice 1. Fabricantes y distribuidores de módulos de RF Al-1 Apéndice 2. Configuración de los parámetros de comunicación entre amo y A2-1
esclavo Modelo de Referencia de Interconexión de Sistemas Abiertos (OSI) Apéndice 3. A3-1
Apéndice 4. Detección de errores A4- 1
REFERENCIAS R-1
iii
Lista de figuras
Figura 1.1.
Figura 1.2.
Figura 1.3.
Figura 1.4. Figura 1.5.
Figura 2.1.
Figura 2.2. Figura 2.3.
Figura 3.1. Figura 3.2. Figura 3.3. Figura 3.4.
Figura 3.5. Figura 3.6. Figura 3.7.
Figura 3.8.
Figura 3.9.
Figura 3.10.
Figura 3.11.
Figura 3.12. Figura 3.13.
Distribución global del consumo de energía eléctrica a nivel nacional. Distribución global de usuarios de energía eléctrica a nivel nacional. Distribución del consumo típico de energía elécirica en edificios residenciales. Ubicación de un sistema DALI. Diagrama general del sistema propuesto de control de iluminación por RF.
Regiones geográficas para atribución del espectro radioeléctrico. Asignación de frecuencias para equipos de aplicación ICM. Sistema maestro de evaluacióddesarrollo de la serie ES de Linx Technologies.
Sistema de control de iluminación por RF. Comunicación entre la computadora y la tarjeta transmisora. Balastro OSRAM con control de 1-1OV. Gráfica del flujo luminoso ante cambios en el voltaje de control para el balastro OSRAM. Balastro de vapor de sodio. Diagrama funcional del DAC serial MAX522. Diagrama de tiempos de un ciclo de conversión del DAC serial MAX522. Conexión del optoacoplador 4N25 para seleccionar los modos de operación del balastro de HID. Conexión del relevador para el control de encendido y apagado. Esquema de conexión fijo del PIC16F628 para cualquier aplicación posible. Esquema de conexión del MAX232 para la conversión de niveles TTL a niveles RS-232 y viceversa. Hardware del sistema desarrollado. Fotografía del sistema de control de iluminación por RF.
1-1
1-2
1-2 1-6
1-12
2-2 2-4
2-1 1
3-1 3-2 3-3
3-3 3-4 3-5
3-6
3-7
3-8
3-10
3-11 3-16 3-16
iv
Figura 4.1. Figura 4.2.
Figura 4.3. Figura 4.4.
Figura 4.5.
Figura 4.6.
Figura 5.1.
Figura 5.2.
Arreglo matncial de 36 lámparas. Diagrama de flujo del algoritmo utilizado para la detección de errores durante la transmisión de información. Esquema del tiempo límite máximo de espera. Diagrama de flujo de la sección de inicio del programa de control de iluminación para el balastro fluorescente OSRAM. Diagrama de flujo de la sección de inicio del programa para el control de iluminación del balastro de HID, Diagrama de flujo del servicio de interrupción de recepción.
Esquema de las pruebas realizadas al balastro fluorescente con control de la intensidad luminosa. Esquema de la etapa de pruebas realizadas con el balastro de vapor de sodio de HID.
4-2
4-6 4-11
4-17
4-18 4-19
5-3
5-3
V
Lista de tablas
Tabla 1.1.
Tabla 11.1. Tabla 11.2. Tabla 11.3. Tabla 11.4.
Tabla 111.1.
Tabla 111.2.
Tabla 111.3.
Tabla IV.l. Tabla IV.2.
Tabla IV.3. Tabla IV.4.
Tabla V.1.
Características de diferentes medios de transmisión.
Bandas de frecuencia del espectro radioeléctrico. Banda de frecuencia de 902-928 MHz de la FCC. Frecuencias de operación para equipos ICM. Niveles de intensidad de campo permitidos para equipos ICM.
Opciones de operación posibles para el control de intensidad luminosa. Funciones ejecutadas por el DAC de acuerdo al valor de la palabra de control. Elección de opciones de operación con los bits B6 y B7.
Valores de 16 bits de los dos polinomios CRC. Comparación de los protocolos empleados por los sistemas comerciales de control de iluminación. Variación de los bits del registro de recepción. Acciones realizadas por los balastros para los valores del registro DATO.
Comparación del sistema desarrollado con los existentes en el mercado.
<
1-8
2-2 2-6 2-7 2-7
3-4
3-6 3-7
4-5
4-8 4-10
4-1 1
5-7
Vi

Resumen
soluciones propuestas resulta en elevados costos debido al las luminarias, además de que se incurre en costos adicionales ya terminados. Existe otra solución viable, la cual es el desde un controlador hacia las luminarias.
cableado desde el controlador hacia para su instalación en edificios
uso de comunicación inalámbrica
Vii
. I amo-esclavo, donde el amo se encuentra basado en una computadora personal y se encarga de transmitir información hacía los esclavos. Los esclavos clentan con un algoritmo de control residente en un microcontrolador, para el control de la iluminación. Se maneja un protocolo de comunicación el cual evita que se alteren los datos, mediante la detección de errores, evitando la interferencia en otros sistemas de RF o IR. La aplicación se lleva a un balastro fluorescente y a un balastro de HID.
Dentro de lo que es el control de la iluminación, se han logrado resultados relevantes con portadora por línea de potencia. Existen también sistkmas comerciales que incorporan infrarrojo y radiofrecuencia para el control inalámbrick de la iluminación, tales como MultiDim y LumiSense, pero continúan usando el cableddo de la instalación eléctrica para hacer más sencillo el control del sistema.
Cabe señalar que la importancia de este trabajo reside i n que no existen documentos que hagan una comparación entre alternativas de comunicacion inalámbrica para su aplicación en sistemas de iluminación y que no existe un sistema comercial que utilice únicamente radiofrecuencia para el control de la iluminación.
La organización de este trabajo comienza con un enfoque general sobre la problemática existente en el consumo energético por parte de las cargas de iluminación. Se comentan las diferentes técnicas que se usan para el control de ilumiriación. Se hace una revisión de los medios de transmisión que existen en las casas autornatiLadas. Y se propone la solución de utilizar comunicación inalámbrica por radiofrecuencia deshe un controlador hacia las lámparas para tener encendido y apagado oportuno en las lámparas, y además control de la intensidad luminosa. Finalmente se definen las especificaciones del sistema de control de iluminación y la metodología a seguir para el desarrollo del sistema.
. , I .
f
En el capítulo 2 se presentan los resultados del análisis de la normatividad que hay que cumplir para operar un equipo de comunicación inaldbrica. Se analiza la normatividad
procedimiento para la selección de los módulos de comdicación inalámbrica más apropiados para la aplicación. Posteriormente se muestran las características técnicas y funcionales del prototipo de comunicación seleccionado.
En el capítulo 3 se describe el diseño y selección de la circuitena completa empleada para probar los diferentes aspectos del sistema de control, incluyendo los balastros usados para las
estipulada para la aplicación, que incluye la nacional así I como la internacional. Se detalla el
I pruebas. I
En el capítulo 4 se detalla la programación necesaria para la transmisión de datos del módulo de comunicación inalámbnca hacía los balastros para el control de la iluminación en las lámparas. Se incluye la programación necesaria en la etapa de recepción para interpretar los mensajes y ejercer una acción de control sobre los balastros.
En el capítulo 5 se recopilan los resultados de las pruebas realizadas en la operación del sistema. En la parte final se hace una comparación con sistemas comerciales equivalentes.
I I
viii
En el capítulo 6 se presentan las conclusiones obtenidas a lo largo de la investigación. Esto permitirá evaluar los aspectos más relevantes del sistema desarrollado, así como las alternativas de solución que se tomaron para alcanzar los objetivos propuestos. Se plantean también los trabajos futuros para mejorar el diseño, o bien para apoyar a otros posibles desarrollos.
En los apéndices, primero se muestra una tabla resultante de la búsqueda de fabricantes y distribuidores de módulos de RF. También se presenta información introductoria para la configuración de los parámetros de la comunicación. Además, se anexa una explicación del Modelo OSI. El apéndice IV muestra un ejemplo del cálculo de los bytes redundantes del código de detección de errores utilizado para añadir confiabilidad en la transmisión de los mensajes. Finalmente, se incluye el programa de control del amo y el de los dos balastros: el fluorescente y el de vapor de sodio respectivamente.
ix
CAPÍTULO i
Introducción
1.1. PLANTEAMIENTO DEL PROBLEMA
1.1.1. Antecedentes
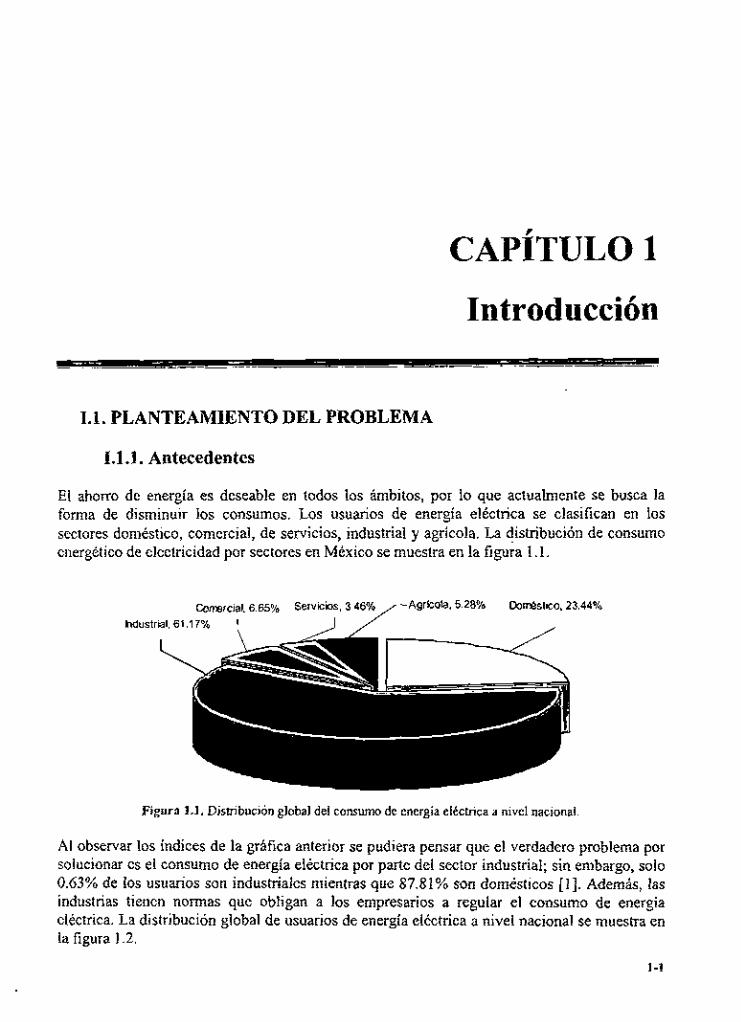
El ahorro de energía es deseable en todos los ámbitos, por lo que actualmente se busca la forma de disminuir los consumos. Los usuarios de energía eléctrica se clasifican en los sectores doméstico, comercial, de servicios, industrial y agrícola. La distribución de consumo energético de electricidad por sectores en México se muestra en la figura 1.1.
&mercia~, 6.65% Servicios, 3.46% Agrkola. 5.28% bm%tico. 23.44%
Industrial, 61.17% 1 J / J
Figura 1.1. Distribución global del consumo de energía eléctrica a nivel nacional.
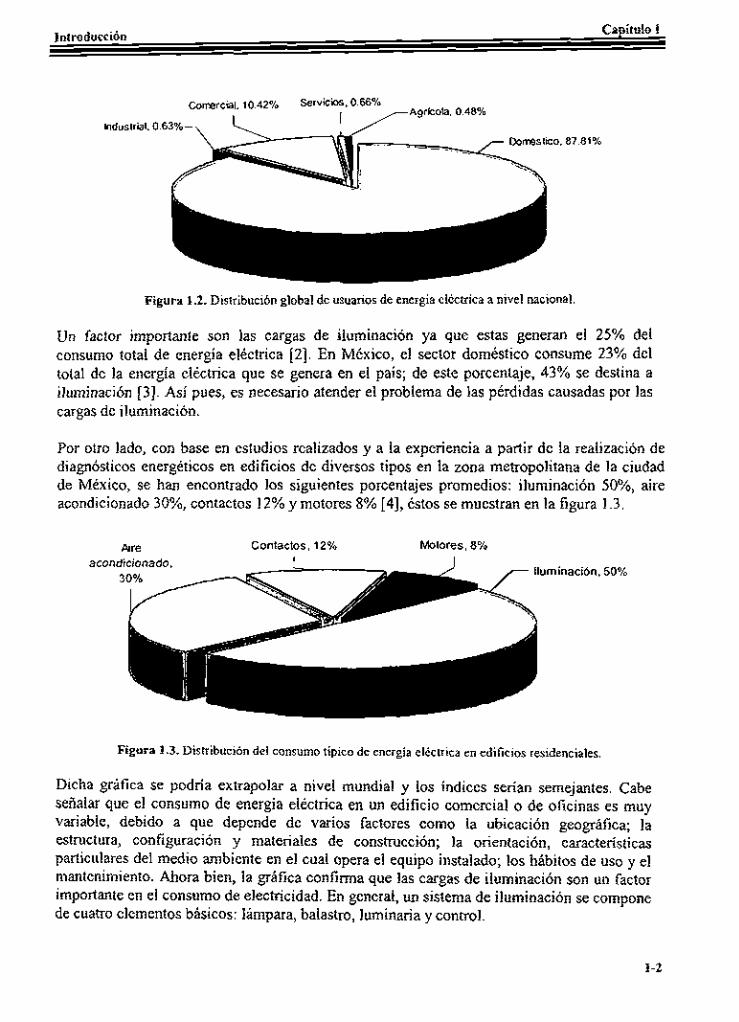
Al observar los índices de la gráfica anterior se pudiera pensar que el verdadero problema por solucionar es el consumo de energía eléctrica por parte del sector industrial; sin embargo, solo 0.63% de los usuarios son industriales mientras que 87.81% son domésticos [I]. Además, las industrias tienen normas que obligan a los empresarios a regular el consumo de energía eléctrica. La distribución global de usuarios de energía eléctrica a nivel nacional se muestra en la figura 1.2.
1-1
Capítulo 1 1 n t r o d u c c i Ó n
~ m r c i a l , 10.42% Servicios. 0.66%
Industrial. 0.63% Do&stico, 87.81%
Figura 1.2. Distribución global de usuarios de energía eléctrica a nivel nacional.
Un factor importante son las cargas de iluminación ya que estas generan el 25% del consumo total de energía eléctrica [ 2 ] . En México, el sector doméstico consume 23% del total de la energía eléctrica que se genera en el país; de este porcentaje, 43% se destina a iluminación [3]. Así pues, es necesario atender el problema de las pérdidas causadas por las cargas de iluminación.
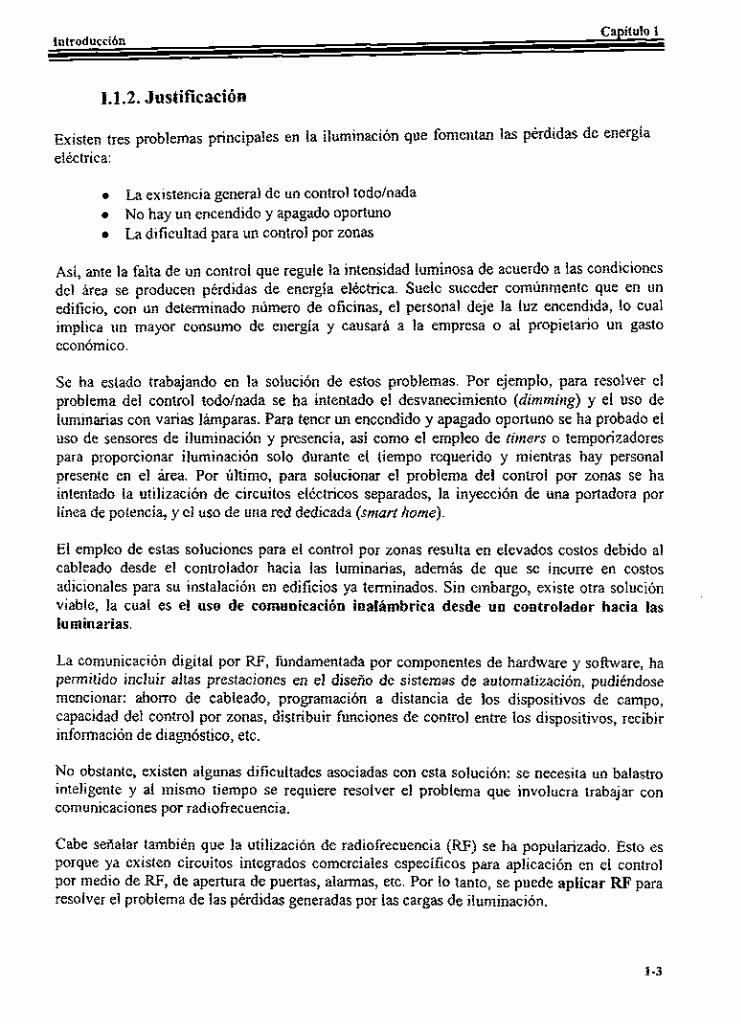
Por otro lado, con base en estudios realizados y a la experiencia a partir de la realización de diagnósticos energéticos en edificios de diversos tipos en la zona metropolitana de la ciudad de México, se han encontrado los siguientes porcentajes promedios: iluminación so%, aire acondicionado 30%, contactos 12% y motores 8% [4], éstos se muestran en la figura 1.3.
Aire Contactos, 12% Motores, 8%
acondicionado. J 30% iiurninacion, w"/o
Figura 1.3. Distribución del consumo típico de energía eléctrica en edificios residenciales.
Dicha gráfica se podría extrapolar a nivel mundial y los índices senan semejantes. Cabe señalar que el consumo de energía eléctrica en un edificio comercial o de oficinas es muy variable, debido a que depende de varios factores como la ubicación geográfica; la estructura, configuración y materiales de construcción; la orientación, Características particulares del medio ambiente en el cual opera el equipo instalado; los hábitos de uso y el mantenimiento. Ahora bien, la gráfica confirma que las cargas de iluminación son un factor importante en el consumo de electricidad. En general, un sistema de iluminación se compone de cuatro elementos básicos: lámpara, balastro, luminaria y control.
1-2
Capítulo 1 Introducción
1.1.2. Justificación
Existen tres problemas principales en la iluminación que fomentan las pérdidas de energía eléctrica:
La existencia general de un control todohada No hay un encendido y apagado oportuno La dificultad para un control por zonas
Así, ante la falta de un control que regule la intensidad luminosa de acuerdo a las condiciones del área se producen pérdidas de energía eléctrica. Suele suceder comúnmente que en un edificio, con un determinado número de oficinas, el personal deje la luz encendida, lo cual implica un mayor consumo de energía y causará a la empresa o al propietano un gasto económico.
Se ha estado trabajando en la solución de estos problemas. Por ejemplo, para resolver el problema del control todohada se ha intentado el desvanecimiento (dimming) y el uso de luminarias con varias lámparas. Para tener un encendido y apagado oportuno se ha probado el uso de sensores de iluminación y presencia, así como el empleo de timers o temporizadores para proporcionar iluminación solo durante el tiempo requerido y mientras hay personal presente en el área. Por Último, para solucionar el problema del control por zonas se ha intentado la utilización de circuitos eléctricos separados, la inyección de una portadora por línea de potencia, y el uso de una red dedicada (mart home).
El empleo de estas soluciones para el control por zonas resulta en elevados costos debido al cableado desde el controlador hacia las luminarias, además de que se incurre en costos adicionales para su instalación en edificios ya terminados. Sin embargo, existe otra solución viable, la cual es el uso de comunicación inalámbrica desde un controlador hacia las luminarias.
La comunicación digital por RF, fundamentada por componentes de hardware y software, ha permitido incluir altas prestaciones en el diseño de sistemas de automatización, pudiéndose mencionar: ahorro de cableado, programación a distancia de los dispositivos de campo, capacidad del control por zonas, distribuir funciones de control entre los dispositivos, recibir información de diagnóstico, etc.
No obstante, existen algunas dificultades asociadas con esta solución: se necesita un balastro inteligente y al mismo tiempo se requiere resolver el problema que involucra trabajar con comunicaciones por radio frecuencia.
Cabe señalar también que la utilización de radiofrecuencia (RF) se ha popularizado. Esto es porque ya existen circuitos integrados comerciales específicos para aplicación en el control por medio de RF, de apertura de puertas, alarmas, etc. Por lo tanto, se puede aplicar RF para resolver el problema de las pérdidas generadas por las cargas de iluminación.
1-3

Capítulo 1 Introducción
1.2. MARCO CONCEPTUAL Y REVISI~N DEL ESTADO DEL ARTE
1.2.1. Métodos para un ahorro de energía eléctrica en la iluminación
El ahorro de energía mediante el aumento de la eficacia se puede logar, por lo que respecta a la parte del suministro, a través de avances tecnológicos en la producción de electricidad y una mejora de los procesos. Por otra parte, por lo que respecta a la parte de la demanda (la energía empleada para calefacción de edificios, aparatos eléctricos, iluminación, etc.), si bien se ha trabajado en incrementar la eficiencia energética de las cargas, existe todavía un margen amplio para su mejora.
La iluminación es probablemente el área más fácil para reducir costos de energía. Empezando con una retroalimentación en iluminación, un sistema nuevo, eficiente, deberá emitir mucho menos calor, lo cual reduce la carga térmica en un sistema de enfriamiento.
Una pobre calidad de iluminación puede hacer que las mejores instalaciones se vean de baja calidad. Además, los empleados de un edificio dependen de una iluminación apropiada para desarrollar sus tareas más eficientemente, y todos en el edificio dependen de un buen sistema de iluminación para propósitos de seguridad.
Mediante la instalación de un sistema de control de la iluminación en un edificio se puede comenzar a ahorrar dinero, mejorar el confort, la seguridad y la productividad de los empleados y huéspedes. Se puede empezar con las áreas que necesitan iluminación las 24 horas del día, la recepción, pasillos y áreas de servicios; esto permite obtener la más rápida recuperación de la inversión.
Un derivado de mejorar el sistema de iluminación es la reducción local y global de contaminación del aire y de las emisiones de carbono en la planta generadora. [SI
Las alternativas generales usadas para el ahorro energético en el consumo por parte de la iluminación son:
Reemplazo de lámparas Mejoras de luminaria Mejoras de lámparas fluorescentes y balastros electrónicos Sensores de presencia Iluminación por grupo
La sustitución por un sistema de iluminación nuevo genera ahorro en el consumo energético y alarga el tiempo de vida del sistema. Con la incorporación de radiofrecuencia a los nuevos sistemas de control de iluminación se evita el cableado desde el controlador hacía la luminaria, por lo que en suma los ahorros serán mucho mejores.
1-4

Capítulo 1 Introducción
1.2.2. Análisis de diferentes técnicas de control de iluminación usadas para fines similares
1.2.2.1. Sistemas de control comerciales
Tres de los sistemas usados comercialmente para el control de la iluminación en un balastro se mencionan a continuación:
a) Sistema con control de portadora por línea de potencia (Power Line Carrier). b) Sistema con control de 1-1OV. c) Sistema con control DALI.
Sistema con control de portadora por línea de potencia (PLC). Es un sistema que utiliza las líneas de la instalación eléctrica como medio de comunicación entre un transmisor y un receptor. El enlace se establece en donde exista un contacto sobre la línea de CA, conectándose a él a través de una interfaz en forma de clavija. Dentro de lo que es el control de la iluminación, se han obtenido resultados interesantes usando portadora por línea de potencia. Se ha llegado hasta modificar la estructura del balastro, haciéndolo inteligente con la incorporación de un chip llamado Neuron*. En [7] se presenta un balastro inteligente construido alrededor de un circuito Neuron de control. La frecuencia de conmutación se controla directamente del puerto de entraddsalida del circuito Neuron, permitiendo encendido suave y estrategias de dimming. La comunicación a través de la línea de energía se realiza usando un transmisor-receptor especial. Este balastro inteligente es capaz de funcionar en redes locales (LAN). En [8] se presenta un sistema de control de iluminación de interiores basado en la tecnología de Lon Worh y usando los balastros inteligentes. Con esta estructura se permite el control de la intensidad luminosa y confiabilidad en el mantenimiento del sistema, la desventaja de este sistema es el costo del chip Neuron. Además el usar las líneas de potencia como medio de comunicación expone al sistema a ruido inducido por otras cargas que se conectan a la línea.
Sistema con control de 1-1OV. Este es un sistema de control de intensidad luminosa de vanguardia. Con fines de crear compatibilidad en los sistemas de control de iluminación se tiene un valor de voltaje bajo de control para el balastro de 1-10 Volts, reduciéndose el número de controladores requeridos por otros sistemas de iluminación. Así, los balastros cuentan con una interfaz analógica de 1-10 Volts para el control del flujo luminoso de un 100% hastaun 1% [9].
* El circuito integrado Neuron es un dispositivo complejo VLSI que hace posible la implementación de una red de control de operación local. Con una combinación de hardware yfirmware puede proveer todas las funciones necesarias para procesar entradas de sensores, y control de dispositivos inteligentes, y propagar la información de control de una variedad de redes del medio de comunicación [6].
1-5
Capítulo 1 Introducción
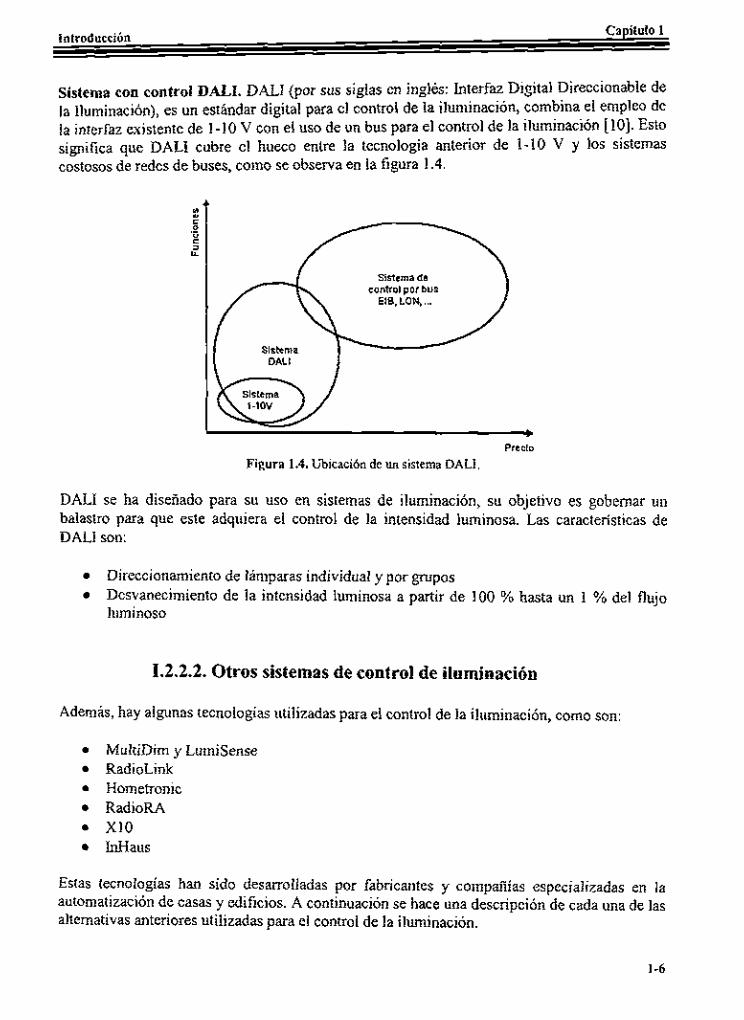
Sistema con control DALI. DALI (por sus siglas en inglés: interfaz Digital Direccionable de la Iluminación), es un estándar digital para el control de la iluminación, combina el empleo de la interfaz existente de 1-10 V con el uso de un bus para el control de la iluminación [lo]. Esto significa que DALI cubre el hueco entre la tecnología anterior de 1-10 V y los sistemas costosos de redes de buses, como se observa en la figura 1.4.
A u) Y
c " c 2 Y
0
Sistema de control por bus
Precia
Figura 1.4. Ubicación de un sistema DALI.
DA1 se ha disc ido para su uso en sistemas de iluminación, su objetivo es gobernar un balastro para que este adquiera el control de la intensidad luminosa. Las características de DALI son:
Direccionamiento de lámparas individual y por grupos Desvanecimiento de la intensidad luminosa a partir de 100 % hasta un 1 % del flujo luminoso
1.2.2.2. Otros sistemas de control de iluminación
Además, hay algunas tecnologías utilizadas para el control de la iluminación, como son:
MultiDim y LumiSense RadioLink Hometronic RadioRA x10 inHaus
Estas tecnologías han sido desarrolladas por fabricantes y compaiiías especializadas en la automatización de casas y edificios. A continuación se hace una descripción de cada una de las alternativas anteriores utilizadas para el control de la iluminación.
1-6
Capítulo 1 Introducción
MultiDim y LumiSense. Estos combinan el sistema con control de portadora por línea de potencia, el sistema con control de 1-10V y el sistema con control por bus y protocolo DALI. En estos sistemas pueden controlarse independientemente hasta 63 balastros [ i l l . Además cuentan con control remoto por infrarrojo [12].
RadioLink. RadioLink es un sistema de control inalámbrico por radiofrecuencia para el uso residencial y comercial. Consiste en sustituir los interruptores de luz tradicionales por los interruptores de RadioLink. Éstos incorporan receptores y se comunican por medio de ondas de radio con una unidad central de proceso para el control de la iluminación. RadioLink utiliza transmisiones digitales, en la extensión del espectro disperso en 900 MHz sobre una banda de 25 canales [13].
Hornetronic. El sistema de automatización doméstica Hometronic es un sistema inalámbnco de RF. La integración de los sistemas se alcanza utilizando tecnología de Internet para el control de dispositivos. Las posibilidades de conexión inalámbrica de dispositivos incluyen el estándar Bluetooth [14]. Además, la red externa utiliza redes del ISDN basadas en satélites y portadora por línea de potencia [ 151.
Lutron. Esta empresa cuenta con un sistema de desvanecimiento de iluminación residencial por RF (RadioRA Home Dimming System). Se basa en reemplazar los interruptores con los Dimmers RA y colocar los controles maestros en alguna posición conveniente para tener un control de la iluminación en la casa [16].
XIO. Es un estándar de comunicación que utilizan los productos compatibles X10 para hablarse entre ellos y que permite controlar las luces y los electrodomésticos del hogar, aprovechando para ello la instalación eléctrica doméstica existente. Cada aparato tiene una dirección a la que responde o envía, existiendo un total de 256 direcciones [17].
InHaus. Se basa en formar una red con los electrodomésticos. Las características incluyen el control automatizado de la iluminación y de la temperatura, así cuando el sistema detecta que la casa está vacía, las luces se apagan y los niveles de la calefacción se reducen automáticamente [18].
En vista de la existencia de medios de transmisión alámbncos e inalámbncos para el control de la iluminación, es necesario realizar un análisis de ellos para justificar el emplear solo radiofrecuencia y dejar a un lado el uso de las líneas de potencia.
1.2.3. Medios de transmisión
El término “medio de transmisión” se usa para describir la ruta fisica entre los dispositivos de transmisión y recepción en un sistema de comunicaciones [19]. A continuación se muestran varios tipos de medios de comunicación:
Par trenzado Cable coaxial
1-7

Capítulo 1 Introducción
Aplicación
Conexiones de computadora
local
TV de cable, transmisión de larga distancia
(radio, televisión)
Para redes de alta velocidad y largas distancias
Transmisión de bajo nivel de datos, casas inteligentes
Fibra Óptica Línea de potencia Radio frecuencia Microonda infrarrojo
Los medios de transmisión se pueden clasificar como dirigido (par trenzado, cable coaxial, fibra Óptica y línea de potencia) y no dirigido (radio, microonda e infrarrojo). En la tabla 1.1 se muestran las principales características de estos medios, las que deberán evaluarse cuidadosamente para seleccionar la más adecuada en una aplicación específica [ 191.
Distancia (sin
repetidor)
2 - 10 km
1 - 10 km
10 - 100 km
< 500 m I 116 dbpV
Tabla 1.1. Características de diferente
'O bis 8oo Mbitís
Medio Frecuencia
Mayor taza de transferencia costoso
datos
< 1000 I G H h Fibra Optica
Datos
I
30-250 m
Línea de Potencia 148.5 kHz
2 Mbiffs
landa estrecha
Dificultad con Ancho de obstáculos, uso de banda muy
licencia libre extendido
902 - 928
5.82 GHz
Lontrol remoto, Periféricos de computadora
18.8-19.2
< 25 m 3000 -
300000 GHz I Infrarrojo
< 1000 m aficionados, televisión
I
Datos i 10-50m
iedios de transmisión. I I
Problemas relocidad de Ventajas transmisión I
10 Mbitís Bajo precio 1 a t e t z i ó n
I I
I I
La taza de
Muy costoso
Estructura de red Ruido en la 9600 biffs disnonible (medio ..
m e a I de cadahogar) I I !
Componentes Taza de 1 kbit/s disponibles, transferencia I licencias libres ]de datos pobrt
I I
cortas
I I Distancias No es necesaria cortas,
4-16 m i t i s I una licencia I contacto con
1-8
Capítulo 1 Introducción
1.2.3.1. Sistemas con medio de transmisión inalámbrica
Entre estos se cuentan la radiofrecuencia @I?), las microondas Y el infrarrojo Para la transmisión, En comparación a los sistemas sujetos a alambre, las redes inalámbricas tienen muchas ventajas:
Flexibilidad Reutilidad Facilidad de instalación y de modificación Transparencia Extensibilidad Interconectividad
Movilidad
En resumen, los medios inalámbricos tienen grandes ventajas, sobretodo si la automatización de la casa tiene que hacerse más adelante en residencias existentes. Las características de sistemas inalámbricos son fuertemente dependientes de la gama de frecuencias que se utilizan de acuerdo a criterios como la anchura de banda, la distancia posible y la penetración. En gamas de frecuencia general, la más alta permite una transmisión de datos más alta pero causa problemas de seguridad. Al trabajar con sistemas inalámbricos, especialmente con radiofrecuencia, se deben tomar en cuenta los siguientes aspectos:
Estándares y licencias. Los sistemas de transmisión inalámbnca para aplicaciones residenciales tienen que utilizar los dominios predefinidos de la frecuencia (bandas para equipos con aplicación Industrial, Científica y Médica, ICM) y necesitan una licencia de una organización local para el uso de la frecuencia dirigida (no es el caso para la transmisión infrarroja). Para las redes locales inalámbricas que usan técnicas de espectro disperso existe un estándar (IEEE 802.11) pero se presentan conflictos con otros estándares porque varían en diversos países.
Codificación, cifrado y aislamiento. La probabilidad de error en sistemas inalámbricos es entre dos a cinco veces más alta que en los sistemas sujetos a cableado. El uso del aire como medio tiene un punto débil con respecto a la seguridad. Las ondas se transmiten vía espacio público y pueden penetrar fácilmente las paredes y los techos en un apartamento, así el peligro de la manipulación de la información por usuarios no autorizados existe siempre. Esto puede tener consecuencias fatales, sobretodo, cuando las señales de control son de suma importancia en su contenido. Por lo tanto los métodos de codificación, u otros para la protección, son enormemente importantes. Algunas buenas soluciones son los métodos del espectro disperso con la codificación de la secuencia o la manipulación de frecuencia directa.
Configuración. La configuración de un sistema de control de iluminación es el método por el cual un instalador une un transmisor a uno o más receptores. Para los sistemas simples tales como X10 [20], la configuración se obtiene asignando a los interruptores del hardware direcciones numéricas. Para los sistemas complejos tales como LonWorks [8], la configuración se alcanza usando una PC conectada con el bus y una interfaz gráfica a través de los cuales los dispositivos se fijan para comunicarse el uno con el otro. Esta interfaz permite que el configurador incorpore los puntos eléctricos en dibujos arquitectónicos y usando el ratón, agrupe, y asigne luces a los interruptores.
1-9
Capítulo 1 Introducción
1.2.4. Protocolos de comunicación y del sistema
La transferencia ordenada de información en un enlace de comunicación se logra por medio de un protocolo. El protocolo consiste en un conjunto de regias y procedimientos que proporciona una técnica uniforme para regir una línea de comunicación. Estas regias y procedimientos facilitan la administración, asignación y control de los recursos involucrados; también establecen métodos para evitar y/o solucionar problemas que se presenten en alguno de los elementos que intervienen [21].
El objetivo es establecer una comunicación entre dos equipos, identificando el emisor y el receptor, asegurando que todos los mensajes se transfieran correctamente y controlando toda la transferencia de información.
Los modos de operación, la estructura de los mensajes, los tipos de solicitudes y respuestas, constituyen las diferentes piezas constructivas del protocolo. Los equipos, las conexiones, los cables, repetidoras, etc., constituyen el soporte físico que permite el enlace de datos.
Es importante aclarar que existen diversos protocolos y codificaciones en comunicaciones dependiendo de la confidencialidad de los datos a transmitir [22]. Los protocolos se definen de la siguiente manera:
Protocolo de comunicación: es un método para la codificación y decodificación de datos, permaneciendo constante para cada transmisión en el sistema. El primer propósito de este protocolo es colocar el dato en una banda base digital para que sea reconocido más fácilmente como un mensaje real por parte del receptor. El segundo propósito es incorporar técnicas de codificación para asegurar que los errores inducidos por ruido no ocurran fácilmente, y cuando se presenten puedan ser siempre detectados. Por Último, los algoritmos que emplea el receptor para la decodificación de datos, deben prevenir la recepción de mensajes fantasmas que son inducidos por ruido, asegurar la recuperación del mensaje real de una secuencia de bits entrante y que ha sido alterado por el ruido [23].
Protocolo del sistema: es la forma en la que los mensajes se coordinan en un sistema. El principal propósito es organizar los mensajes para tener una máxima utilización y eficiencia en la red, y además asegurar que los mensajes no colisionen. Los protocolos de sistema más usados son:
Paso de Testigo (Tokenpassing)
Amo-Esclavo (o también llamado polling=sondeo) Acceso Múltiple con Detección de Portadora (CSMA)
El sistema desarrollado en este trabajo es unidireccional, solo transmite en un solo sentido y no se requiere que el receptor emita una respuesta, por lo que el protocolo de sistema seleccionado fue el Amo-Esclavo. Para aplicar este tipo de protocolo del sistema es necesario un “Amo” el cual se comunicará con los diferentes “esclavos” cada uno de los cuales residirá en una dirección única.
1-10

Capitulo 1 Introducción
En este método los esclavos permanecen en “silencio” hasta que el Amo los direccione [24]. Los mensajes del Amo incluyen la dirección específica del esclavo que se está direccionando. De tal manera que cuando el Amo envíe información, todos los esclavos la recibirán simultáneamente y solo responderá el que esté siendo direccionado en ese momento.
1.3. OBJETIVOS GENERALES Y PARTICULARES
Objetivo general Analizar las alternativas de comunicación inalámbrica para aplicaciones en sistemas de iluminación que permitan controlar, por medio de una comunicación en RF, el encendido, apagado remoto y control de intensidad luminosa de lámparas.
Objetivos particulares Estudio de la normatividad vigente Análisis de protocolos de comunicación inalámbrica Estudio de estrategias de mando El desarrollo de una interfase para el balastro
Alcances y Metas Con aplicación a sistemas de iluminación en edificios, Probar al menos dos tipos de balastros ya construidos, siendo balastros simples, ya que el balastro no es la aplicación importante.
1.4. SISTEMA PROPUESTO
El sistema de control amo tendrá integrado un módulo transmisor el cual enviará la información vía RF, mientras que los esclavos consistirán en balastros que contendrán su etapa de recepción para interpretar la información proveniente del amo.
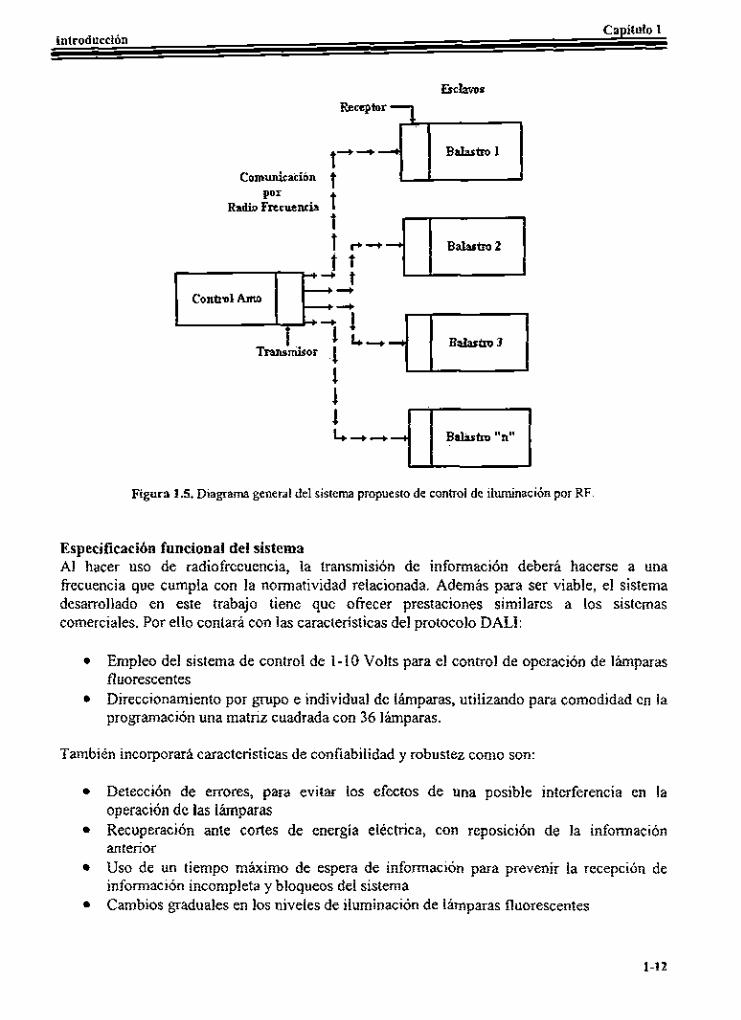
En la figura 1.5 se muestra un diagrama general del sistema de control de iluminación por radiofrecuencia hacía un determinado número de balastros.
. o 3 - o 6 2 3 1-11
Capítulo 1 Introducción
E s c h s Receptor 1
Figura 1.5. Diagrama general del sistema propuesto de control de iluminación por RF
Especificacibn funcional del sistema Al hacer uso de radiofrecuencia, la transmisión de información deberá hacerse a una frecuencia que cumpla con la normatividad relacionada. Además para ser viable, el sistema desarrollado en este trabajo tiene que ofrecer prestaciones similares a los sistemas comerciales. Por ello contará con las características del protocolo DALL
Empleo del sistema de control de 1-10 Volts para el control de operación de lámparas fluorescentes Direccionamiento por grupo e individual de lámparas, utilizando para comodidad en la programación una matriz cuadrada con 36 lámparas.
También incorporará caractensticas de confiabilidad y robustez como son:
Detección de errores, para evitar los efectos de una posible interferencia en la operación de las lámparas Recuperación ante cortes de energía eléctrica, con reposición de la información anterior Uso de un tiempo máximo de espera de información para prevenir la recepción de información incompleta y bloqueos del sistema Cambios graduales en los niveles de iluminación de lámparas fluorescentes
1-12
1.5. APORTACI~N o CONTRIBUCI~N DEL TRABAJO
El desarrollo de un sistema que utiliza solo radiofrecuencia para el control de la iluminación. Los sistemas comerciales existentes utilizan una combinación de radiofrecuencia o de infkarrojo con portadora por la línea de potencia.
Comparación entre alternativas de comunicación inalámbnca para su aplicación en sistemas de iluminación.
La incorporación de un control remoto en el balastro para lámpara de vapor de sodio desarrollado por el gnipo de iluminación del CENIDET.
1-13

CAPÍTULO 2
Normatividad del prototipo de comunicación por RF
11.1. REVISI~N DE LA NORMATIVIDAD EXISTENTE
En este capítulo se estudian las normas nacionales e internacionales referentes a dispositivos de radiofrecuencia. Este estudio permite la selección de la banda de frecuencias más apropiada para la operación del sistema de control de la iluminación por RF. La banda elegida deberá estipular un número reducido de nomas por cumplir, ya que ello permitirá, en un futuro, comercializar el prototipo final sin tener que sujetarse a un proceso extenso de peritaje para el cumplimiento de nomas.
La selección de los circuitos debe ser la más adecuada, tomando en cuenta un buen estudio de la normatividad para tener un sistema de transmisión de calidad.
En México, la Comisión Federal de Telecomunicaciones (COFETEL), organismo dependiente de la Secretaría de Comunicaciones y Transportes (SCT), es la encargada de la regulación del uso del espectro Radioeléctrico [25]. En los Estados Unidos de América, el organismo encargado de establecer las regulaciones en materia de comunicaciones es la Comisión Federal de Comunicaciones (FCC) [26] . El organismo más importante en la materia a nivel mundial es la Unión Internacional de Telecomunicaciones (ITU) ubicada en Ginebra Suiza [27].
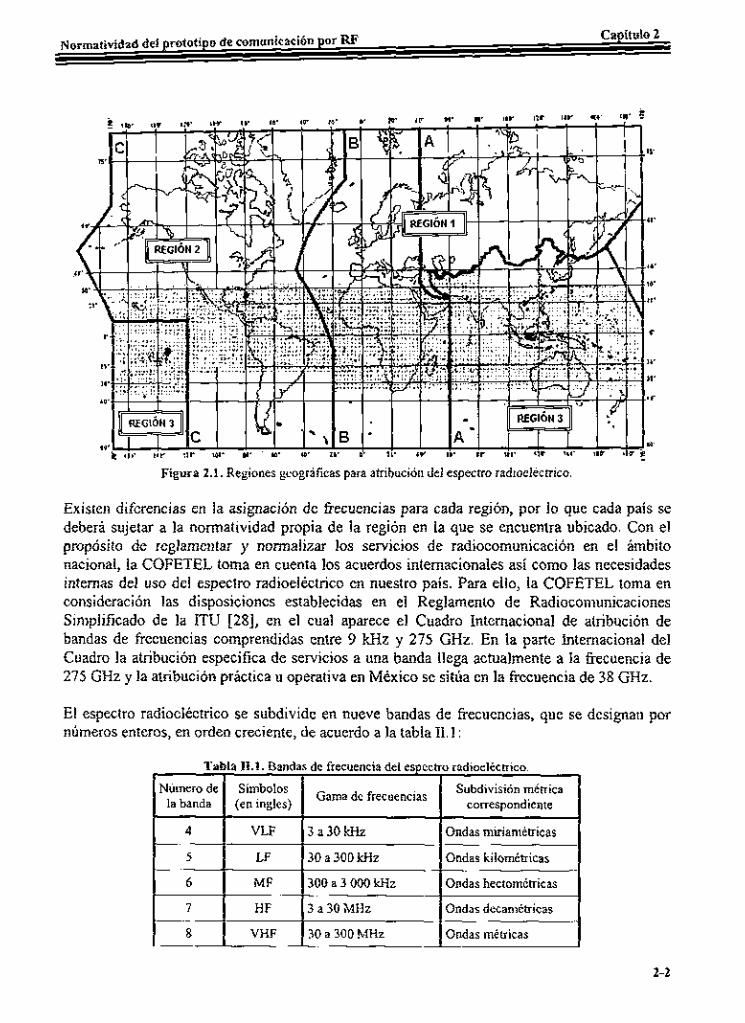
Con el fin de planificar, atribuir y asignar las bandas de frecuencias del espectro radioeléctrico de manera equitativa, la ITU ha dividido al mundo en tres Regiones Geográficas. Con base en esa división, la parte internacional del "Cuadro de atribución de frecuencias del espectro radioeléctrico" consta de tres columnas, denominadas Región 1, Región 2 y Región 3, respectivamente. Dichas regiones se refieren a distintas zonas geográficas, como se indica en la figura 2.1. La parte sombreada representa la zona tropical.
2-1
Capitulo 2 Nornuti\,idad del prototipo de comuniraci6n por RF
Figura 2.1. Regiones geográficas para atribución del espectro radioeléctrico.
Existen diferencias en la asignación de frecuencias para cada región, por lo que cada país se deberá sujetar a la normatividad propia de la región en la que se encuentra ubicado. Con el propósito de reglamentar y normalizar los servicios de radiocomunicación en el ámbito nacional, la COFETEL toma en cuenta los acuerdos internacionales así como las necesidades internas del uso del espectro radioeléctrico en nuestro país. Para ello, la COFETEL toma en consideración las disposiciones establecidas en el Reglamento de Radiocomunicaciones Simplificado de la ITU [28] , en el cual aparece el Cuadro Internacional de atribución de bandas de frecuencias comprendidas entre 9 !diz y 275 GHz. En la parte Internacional del Cuadro la atribución específica de servicios a una banda llega actualmente a la frecuencia de 275 GHz y la atribución práctica u operativa en México se sitúa en la frecuencia de 38 GHz.
El espectro radioeléctrico se subdivide en nueve bandas de frecuencias, que se designan por números enteros, en orden creciente, de acuerdo a la tabla II.1:
Tabla 11.1. Ban(
HF
VHF
i de frecuencia del espe
Gama de frecuencias
3a30kHz
30 a 300 IcHz
300 a 3 O00 kHz
3 a 30 MHz
30 a 300 MHz
o radioeléctrico.
correspondiente I
Ondas miriamétricas
2-2
Normatividad del prototipo de comunicación par RF‘ Capitulo 2
9 UHF 300 a 3 O00 MHz
10 SHF 3a30GHz
1 1 EHF 30 a 300 GHz
12 300 a 3 O00 GHz
Ondas deciméiricas
Ondas centhéhicas
Ondas milimétricas
Ondas decimilimétricas
Al trabajar con RF, debe hacerse siempre una clara distinción entre lo que es técnicamente posible y lo que es legalmente aceptable. Es decir, la consideración de problemas técnicos sirve de poco propósito si la frecuencia escogida no puede usarse legalmente para su propósito intencional. Al realizar un diseño de RF es necesario considerar problemas de legalidad con la frecuencia que se planea utilizar.
Sin embargo, existen equipos que no requieren licencia legal para transmitir. Ciertas bandas dentro del espectro de RF están disponibles para funcionamiento “sin licencia legal”. El término “sin licencia legal” a menudo se entiende mal. El fabricante de un producto diseñado para funcionamiento “sin licencia legal” no está exento del procedimiento de certificación. De hecho, el transmisor y receptor deben probarse en un laboratorio de verificación calificado para obtener el aval de la organización que regula el espectro radioeléctrico antes de que el producto pueda venderse legalmente. Una vez que se ha hecho esto, los usuarios del producto pueden operarlo sin obtener una licencia para su uso.
Por ser una aplicación Industrial, el equipo objeto de esta tesis puede definirse como una aplicación Industrial Científica y Médica (ICM).
Los equipos ICM son dispositivos que producen energía de radioikcuencia, sin embargo, conviene aclarar que la utilizan internamente para generar efectos de tipo físico, mecánico, biológico y/o químico. Entre las aplicaciones ICM típicas tenemos las siguientes: Calefacción industrial en procesos de manufactura, diatermia médica, aceleración de partículas cargadas, transductores electromecánicos para producir energía mecánica ultrasónica, ultrasónicos domésticos, limpiadores domésticos de joyería.
Los equipos ICM no requieren permisos especiales para la transmisión en México ni en el mundo, debiendo sólo cumplir con las frecuencias establecidas por los organismos encargados de regular la atribución del espectro radioeléctrico.
El intervalo de frecuencia en el que operan los equipos ICM es el de UHF (Ultra Alta Frecuencia por sus siglas en inglés) que abarca de 300 a 3000 MHz, ya que es adecuada para comunicación fija y móvil, y aplicaciones especiales [29] . La banda de UHF es capaz de traspasar sólidos y tiene un alcance menor a 100 km.
Dado que el uso de frecuencias permitidas varía considerablemente en el mundo, debe realizarse una revisión de las normatividad mexicana e internacional relacionada con la operación de equipos ICM.
2-3
ZHR LO6 - 106 ‘\e, VlS03NV VONV’8 30 lVNOStlJ3d
NQl~V’3INnYY03 30 SO13IAtl3S
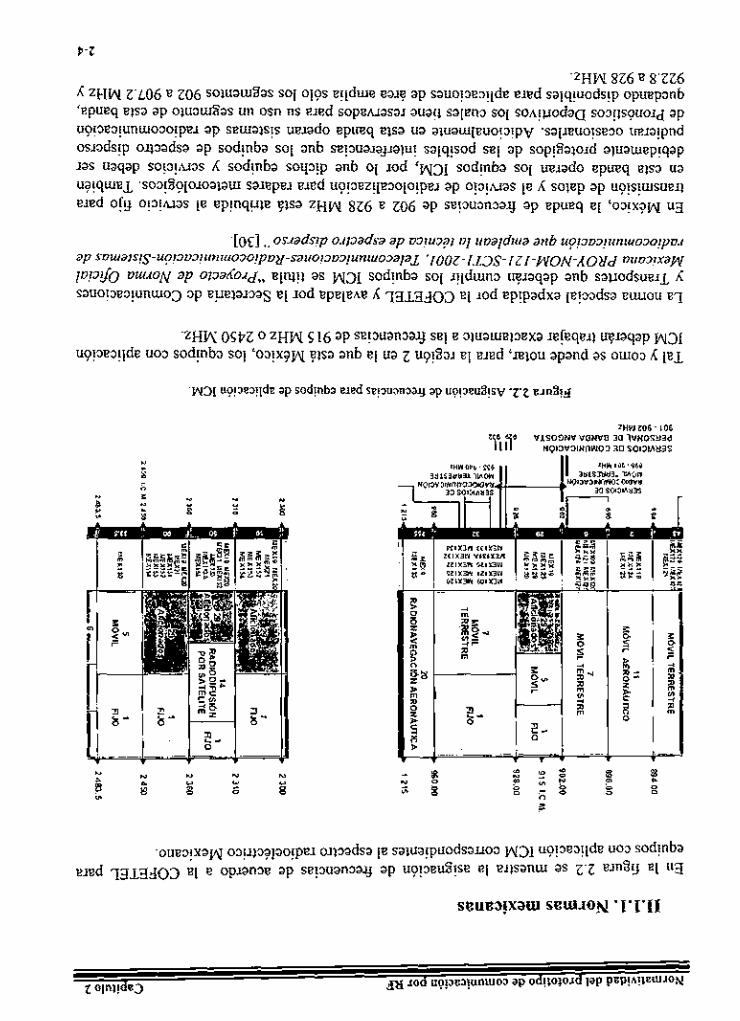
Normatividad del prototipo de comunicación por RF Capitulo 2
Conviene tener presente que en los artículos 124 y 125 del Reglamento de Telecomunicaciones de México [31], se hace alusión a que los equipos ICM podrán operar en bandas de frecuencias diferentes a las designadas, debiendo adoptar todas las medidas necesarias para garantizar el no causar interferencias perjudiciales a los equipos, sistemas y red de radiocomunicación autorizadas o que autorice la Secretm'a en las bandas de kecuencia de que se trate. En particular, dichos equipos pueden operar entre otras en las bandas de 902 a 928 MHz; 2 400 a 2 483.5 MHz y 5 725 a 5 850 MHz.
No podrá realizarse la operación de los equipos ICM en las bandas de frecuencias 490-510
MHz y en las demás bandas de frecuencias atribuidas nacional e internacionalmente para socorro, seguridad, búsqueda y salvamento.
~ H z , 2170-2194 ~ H z , 8354-8374 Mz, 121.4-121.6 MHz, 156.7-156.9 MHz, 242.8-243.2
Los equipos ICM registrados ante la Secretaría de Comunicaciones y Transportes no requerirán de permiso para operar dentro de las bandas de frecuencias designadas por la COFETEL para operar en aplicaciones industriales, científicas y médicas.
Los propietanos de los equipos ICM no podrán demandar derecho o reconocimiento alguno en el uso de cualquier frecuencia utilizada. Además, si al operarse un equipo ICM se produce una interferencia objetable a servicios de radiocomunicaciones fuera de las bandas de frecuencias designadas para aplicaciones ICM, los propietarios y operarios del equipo ICM deberán de efectuar todo lo necesario para eliminar la interferencia perjudicial.
Las estaciones, sistemas y redes de radiocomunicación que la Secretaría autorice a operar en las bandas de ICM, deberán aceptar las interferencias que puedan causarles los equipos ICM y no deberán causar interferencia perjudicial al funcionamiento de los equipos ICM instalados en las proximidades de SUS instalaciones o en las trayectorias de sus emisiones.
Así finalmente de acuerdo a la normatividad mexicana se puede concluir que es posible no ciimplir la frecuencia exacta estipulada para la operación de los equipos ICM, podiendo trabajar en toda la banda de 902 a 928 MHz, mientras estos no interfieran entre sí o con equipos que utilizan espectro disperso.
111.1.2. Normas internacionales
En este punto es necesario hacer una comparación con un organismo similar a la COFETEL para obtener mayor información respecto a la normatividad para equipos ICM. En los Estados Unidos la Comisión Federal de Comunicaciones (FCC), es responsable de regular la operación de todos los equipos de RF. Estas regulaciones están contenidas en el Título 47 del Código Federal de Regulaciones (CFR).
El Título 47 está compuesto de numerosos volúmenes; sin embargo, todas las regulaciones aplicables al funcionamiento en las bandas de 902 MHz a 928MHz están contenidas en los
2-5
Capitulo 2 Normatividad del prototipo de comunicación por RF
Región 2
volúmenes 0-19. La parte o volumen 18 de este título contiene las normas principales para equipos de aplicación ICM.
En Estados Unidos de América se solicita que cualquier dispositivo que radia energía de RF sea probado en su cumplimiento de las reglas de la FCC.
La Parte 15 proporciona los requisitos para operar sin licencia de transmisión en muchas bandas que son dificiles de interpretar. Sin embargo, las regulaciones de la Parte 15.249 son muy directas, al mencionar que para ser clasificado como un equipo que no requiere licencia se debe cumplir con los límites de la frecuencia de operación, de la potencia de salida y con los límites de armónicos y emisión de espurias.
A los dispositivos que operan bajo la Parte 15.249 se les permite una intensidad de campo a un máximo de 50,000 microvolts y armónicos de 500 microvolts medidos a tres metros de distancia. Toda la radiación de espurias deberá atenuarse a menos de 50 dB o debajo de 200 microvolts para operación debajo de 960 MHz o debajo de 500 microvolts arriba de esa frecuencia.
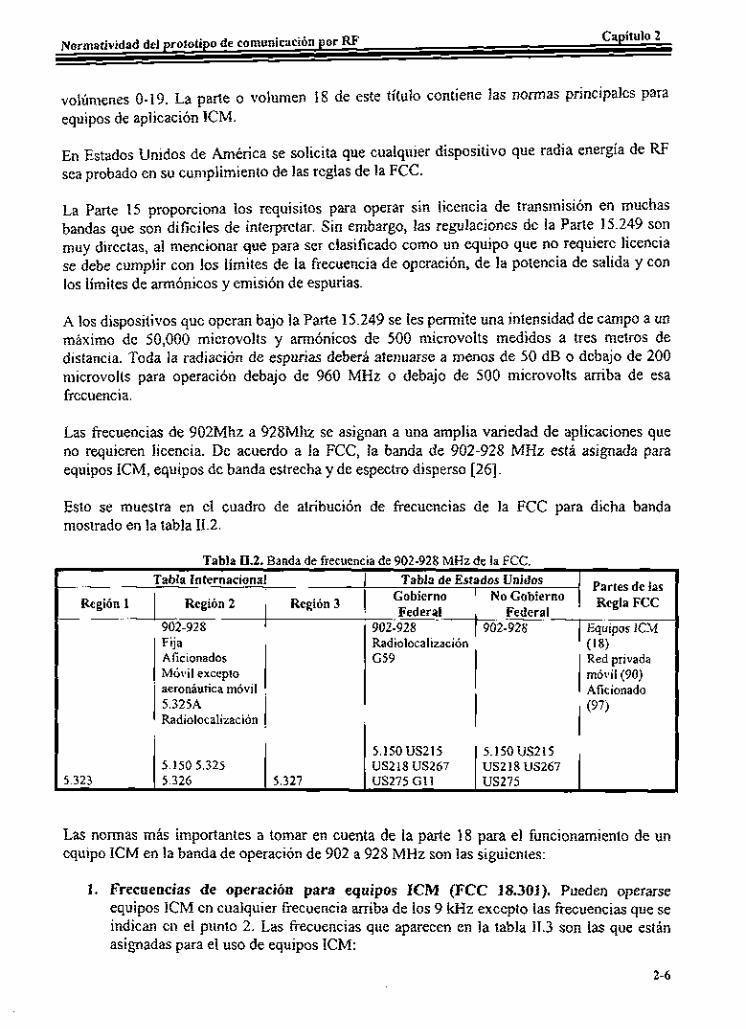
Las frecuencias de 902Mhz a 928Mhz se asignan a una amplia variedad de aplicaciones que no requieren licencia. De acuerdo a la FCC, la banda de 902-928 MHz está asignada para equipos ICM, equipos de banda estrecha y de espectro disperso [26].
Esto se muestra en el cuadro de atribución de frecuencias de la FCC para dicha banda
Región 3
mostrado en la tabla 11.2.
5.150 5.325 5.326
Región 1
, 5.327 i.323
Federal 902-928 Radiolocalización G59
5.150US215 US218 US267 US275 G11
e la FCC. dos Unidos
No Gobierno Federal
902-928
5.150US215 US2 18 US267 US275
Partes de las Regla FCC
Equipos ICM
Red privada móvil (90) Aficionado
(18)
(97)
Las normas más importantes a tomar en cuenta de la parte 18 para el funcionamiento de un equipo ICM en la banda de operación de 902 a 928 MHz son las siguientes:
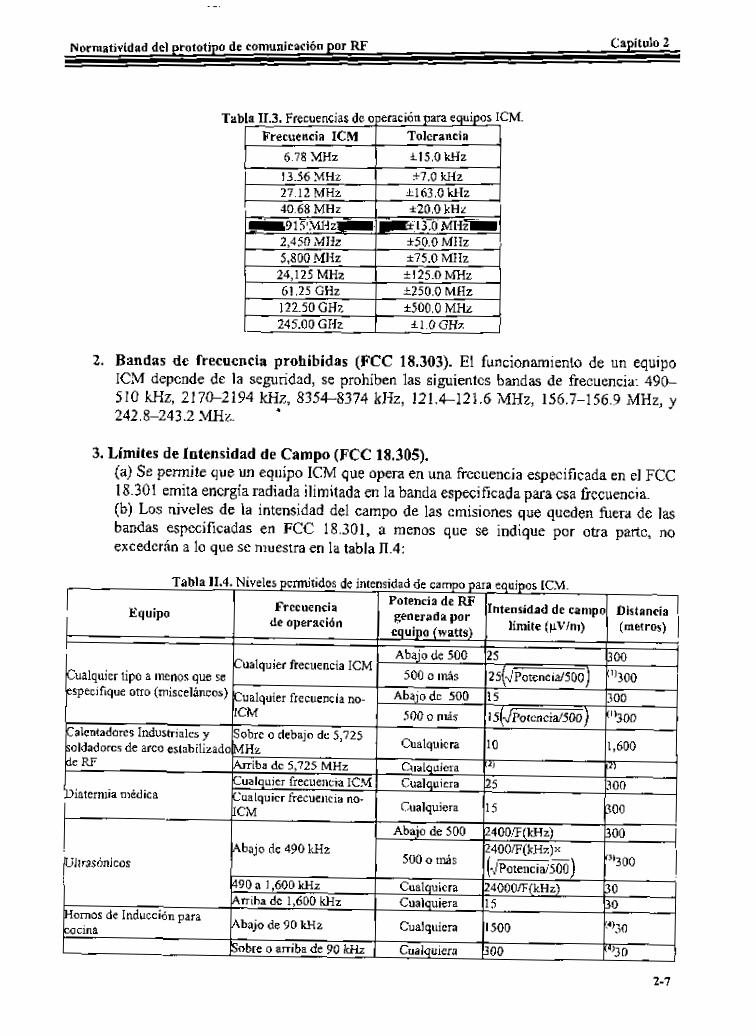
1. Frecuencias de operación para equipos ICM (FCC 18.301). Pueden operarse equipos ICM en cualquier frecuencia arriba de los 9 kHz excepto las frecuencias que se indican en el punto 2. Las frecuencias que aparecen en la tabla iI.3 son las que están asignadas para el uso de equipos ICM:
2-6
Norniatividad del prototipo de comunicación por RF Capítulo 2
I Frecuencia ICM 1 Tolerancia
2. Bandas de frecuencia prohibidas (FCC 18.303). El funcionamiento de un equipo ICM depende de la seguridad, se prohíben las siguientes bandas de frecuencia: 490-
242.8-243.2 MHz. 510 ~ H z , 2170-2194 ~ H z , 8354-8374 ~ H z , 121.4-121.6 MHz, 156.7-156.9 MHz, y
3. Límites de Intensidad de Campo (FCC 18.305). (a) Se permite que un equipo ICM que opera en una frecuencia especificada en el FCC 18.301 emita energía radiada ilimitada en la banda especificada para esa frecuencia. (b) Los niveles de la intensidad del campo de las emisiones que queden fuera de las bandas especificadas en FCC 18.301, a menos que se indique por otra parte, no excederán a lo que se muestra en la tabla II.4:
aiquier tipo a menos que se
iatermia médica
2-1
Normatividad del prototipo de comunicación por RF Capítulo 2
Notas: 1 La lntensidad del campo no puede exceder 10 pV/m a 1600 metros. No se permite el incremento de la intensidad de campo permitido aquí para un equipo de usuario que opere debajo de 1000 MHz para potencias amiba de 500 watts. 2 Reducido a la más grande magnitud posible. 3 Intensidad del campo no puede exceder 10 pV/m a 1600 metros. No se pemiite un equipo del consumidor que opere debajo de 1000 MHz, otra forma permitida para potencias arriba de 500 watts. 4 Homos de inducción de rangos fabricados antes del 1 de febrero de 1980, estarán sujetos a la intensidad de campo limitada para un equipo ICM misceláneo.
De lo anterior cabe resaltar que la FCC da una tolerancia de f 1 3 MHz para equipos con aplicación ICM que operan de 902-928 MHz. Es importante mencionar que algunos de los fabricantes de módulos de RF han adoptado la frecuencia de 916.48 MHz para aplicaciones ICM de pequeño alcance.
Mientras que las bandas de frecuencia prohibidas dadas en FCC 18.303 para el funcionamiento de un equipo ICM corresponden a las mismas que marca la norma mexicana.
Finalmente, dado que la norma de la COFETEL no marca los límites de la intensidad del campo para equipos ICM, se puede tomar la norma FCC 18.305 como una norma internacional.
Existen ventajas en la operación dentro de la banda de 902-928 MHz:
1. Es una banda libre. La banda es libre de las restricciones firmes de la FCC con las que limita las aplicaciones para que puedan usarse en otras bandas. Dentro de 902-928 MHz cualquier señal analógica o de datos puede enviarse sin restricciones en cuanto a su volumen o duración.
2. Potencia de salida más alta, lo que produce una transmisión a más grandes distancias que otras bandas.
3. La propagación de frecuencias en el intervalo de 900Mhz es mejor que a frecuencias más altas, como la de 2.4GHz. Por consiguiente, se necesita menor potencia de salida para lograr llegar a una distancia en particular.
4. Tamaño reducido de la antena. En operaciones a frecuencias más altas la longitud de onda es más pequeña. Esto permite que una antena de ií4-onda usada en los 900 MHz sea típicamente menor de 8.25 centímetros de longitud.
Pero también hay inconvenientes de la operación en la banda de 902-928 MHz:
1. La falta de restricciones en la banda ha fomentado su popularidad,' y que se esté congestionando. Muchos productos que transmiten datos continuos en grandes cantidades están emigrando ahora a frecuencias más altas, debido a que la popularidad de la banda ocasionará que permanezca saturada.
2-8
hormatividad del prototipo de coniunicaci6n por Capítulo 2
2. Mayor nivel de interferencia. Además de su asignación para dispositivos de banda angosta, el intervalo de frecuencia de 902 a 928 MHz se asigna también para equipos altamente interferentes como los de espectro disperso.
3. Dificultad de exportación. La mayoría de los países fuera de los Estados Unidos de América no permiten un funcionamiento similar en la banda de los 900MHz; así, es normalmente impráctico exportar un dispositivo que opera en este intervalo. Sin embargo, ahora las frecuencias cercanas están regularizándose para grandes áreas del mercado Europeo.
11.2. ANÁLISIS DE LOS CIRCUITOS INTEGRADOS DISPONIBLES PARA RESOLVER LA APLICACI~N
Con el fin de obtener un sistema de transmisión de calidad es necesario realizar una búsqueda de los dispositivos y módulos que cumplen con las normas y son factibles de utilizarse en esta aplicación como equipos ICM. Primero es necesario entender y delimitar las características del módulo encargado de la comunicación por radiofrecuencia. A continuación se hace mención de las características del módulo.
Entrada de control digital y salida de respuesta digital para comunicación con procesadores digitales. Ser un módulo o kit de evaluación y desarrollo para una manipulación rápida, fácil y confiable. Con un alcance de transmisión mayor que el de los sistemas comerciales que utilizan infrarrojo (6 metros). Debe trabajar a la frecuencia más apropiada para el tipo de aplicación y respetar la normatividad. Transmisión serie de salida en el receptor para manipulación de periféricos con un menor número de terminales. El módulo no necesariamente tiene que estar compuesto por un trunsceptor ya que solo se requiere enviar datos, y no que el balastro emita una respuesta.
Teniendo en cuenta las características necesarias, se podrá recopilar la mayor información posible sobre los módulos de comunicación inalámbrica que cumplan algunas de estas características para hacer la mejor selección.
Una búsqueda eficaz se estructura ubicando fabricantes y distribuidores de kits de evaluación y de desarrollo, de módulos y dispositivos de radiofrecuencia (véase el Apéndice I). Se identificaron 21 fabricantes, y se seleccionó a Lim Technologies [32], el cual produce kits de evaluación y desarrollo que operan en la banda de UHF, para distintas aplicaciones. Enseguida se evaluaron los kits para determinar la mejor opción.
Los módulos de comunicación emplean una variedad de técnicas para minimizar el posible impacto de la interferencia: filtración, asignación de fYecuencia distinta, agrupación en canales y técnicas de modulación de portadora.
2-9
Norniatividad del prototipo de comunicación por RF Capítulo 2
~1 kit elegido fue el MDEV-916-ES, el cual es de la Sene ES, llamado USTEM.4 MAESTRO de EVALUACION/DESARROLLO, ES un Módulo de RF para entradas inalámbricas, analógicas y digitales, que pcmite agregar capacidades inalámbricas, analógicas o digitales a un diseño. Sus caractensticas principales son:
Trabaja en la Banda ICM de la FCC a 916.48 MHz, la cual algunos fabricantes la han propuesto para equipos con aplicación ICM de alcance corto. Potencia de salida de O dBm = 1 mW y una velocidad de transmisión de 56 kbps, valores muy adecuados para realizar la comunicación en el sistema de aplicación. Alcance de transmisión de 304.8 m en exteriores y 152.4 m en interiores. AI ser un equipo ICM, no requiere ningún permiso especial para transmitir en una aplicación comercial. Cumple las normas de la FCC.
Los demás kits trabajan en frecuencias saturadas (315 MHz, 418 MHz, 433MHz) o que requieren cumplir más normas, y algunos otros exceden la capacidad necesaria para resolver la aplicación (MDEV-916-SC y MDEV-900-HP).
En el caso del kit de evaluación seleccionado no cumple la frecuencia exacta estipulada en el cuadro de atribución del espectro radioeléctrico para equipos ICM por la COFETEL, donde se observa que un equipo ICM debe trabajar a 915 MHz o a 2450 MHz exactamente. Pero, por lo visto anteriormente en el Reglamento de Telecomunicaciones de México [7] se puede transmitir a una frecuencia que se encuentre en la banda de 902 a 928 MHz siempre y cuando no se interfiera a otros equipos ICM que trabajen a la misma frecuencia o a equipos de espectro disperso que se encuentren en la misma zona.
Así pues, en la etapa de pruebas no es necesario que el módulo trabaje a 915 MHz, se puede transmitir a 916.48 MHz, dado que no hay equipos con aplicación ICM o equipos que transmitan espectro disperso en la zona en la que se opera el sistema.
Después del análisis anterior, se puede comprobar que las características del prototipo de comunicación seleccionado son las trazadas en el inicio de la búsqueda.
Es importante hacer notar que el kit cumple los requisitos de las normas FCC, pero los factores externos pueden afectar el rendimiento. Esto se debe a que el nivel radiado de RF en el espacio libre no sólo es dependiente de la potencia de salida sino también del tipo de antena empleado.
11.3. PROTOTIPO DE COMUNICACIÓN
En este apartado se describen en forma resumida las principales características de las tarjetas que, basadas en un transmisor y receptor respectivamente, permiten la transferencia de información digital por RF.
2-10
Normatividad del prototipo de comuniracibn por RF Capitulo 2
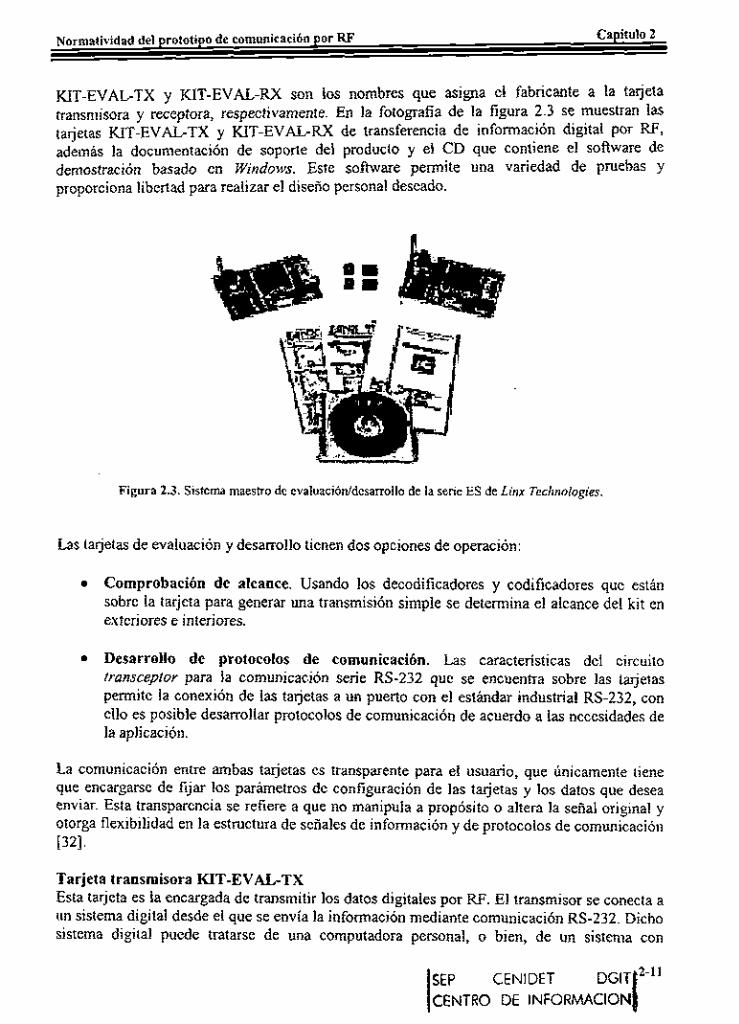
KIT-EVAL-TX y KIT-EVAL-RX son los nombres que asigna el fabricante a la tarjeta transmisora y receptora, respectivamente. En la fotografia de la figura 2.3 se muestran las tarjetas KIT-EVAL-TX y KIT-EVAL-RX de transferencia de información digital por RF, además la documentación de soporte del producto y el CD que contiene el software de demostración basado en Windows. Este software permite una variedad de pruebas y proporciona libertad para realizar el diseño personal deseado.
Figura 2.3. Sistema maestro de evaluacióddesarrollo de la sene ES de Linx Technologies,
Las tarjetas de evaluación y desarrollo tienen dos opciones de operación:
Comprobación de alcance. Usando los decodificadores y codificadores que están sobre la tarjeta para generar una transmisión simple se determina el alcance del kit en exteriores e interiores.
Desarrollo de protocolos de comunicación. Las características del circuito transceptov para la comunicación serie RS-232 que se encuentra sobre las tarjetas permite la conexión de las tarjetas a un puerto con el estándar industrial RS-232, con ello es posible desarrollar protocolos de comunicación de acuerdo a las necesidades de la aplicación.
La comunicación entre ambas tarjetas es transparente para el usuario, que únicamente tiene que encargarse de fijar los parámetros de configuración de las tarjetas y los datos que desea enviar. Esta transparencia se refiere a que no manipula a propósito o altera la señal original y otorga flexibilidad en la estructura de señales de información y de protocolos de comunicación [321.
Tarjeta transmisora KIT-EVAL-TX Esta tarjeta es la encargada de transmitir los datos digitales por RF. El transmisor se conecta a un sistema digital desde el que se envía la información mediante comunicación RS-232. Dicho sistema digital puede tratarse de una computadora personal, o bien, de un sistema con

Normatividad del prntotipo de comunicación por RF Capitulo 2
microcontrolador. La tarjeta KIT-EVAL-TX puede considerarse un subsistema que forma parte de un sistema principal que lo requiere para enviar datos digitales por RF.
Tarjeta receptora KIT-EVAL-RX El receptor puede entregar los datos digitales recibidos por RF a una PC, a una terminal de datos o a un sistema con microcontrolador o microprocesador mediante la interfaz RS-232. La tarjeta es un subsistema que forma parte de un sistema principal y al cual le proporciona la información digital que recibe por RF. Se limita a recibir los datos, empaquetarlos, verificarlos y, finalmente, entregarlos en serie al sistema del usuario para que los procese.
Un enlace de datos entre procesadores permite controlar los parámetros de la comunicación. Por lo que el sistema central se basa en una computadora personal.
2-12

CAPÍTULO 3
Desarrollo del hardware
III.I.INTRODUCCI~N
Una vez que se seleccionó el prototipo de comunicación inalámbrica que se empleará para la transmisión de información, es necesario elegir los componentes que completarán el sistema de control de iluminación. En la figura 3.1 se muestra el diagrama a bloques del sistema de control de iluminación por radiofrecuencia.
Dntsna
V '
I w TFallSmlSOi Mbdulo Computadora
Personal I .
AMO ESCLAVO
Figura 3.1. Sistema de control de iluminación por RF.
La comunicación es a través de RF utilizando el MDEV-916-ES como interfaz hacia el canal de comunicación. El amo será una computadora conectada al transmisor y los esclavos serán los balastros con su etapa de recepción incorporada.
La tarjeta de transmisión contiene un conector DB9 para la comunicación sene RS-232 con algún dispositivo o tarjeta que trabaje con el mismo estándar. En el sistema.desarrol1ado el puerto de comunicación sene es el medio mediante el cual la computadora envía datos a la tarjeta de transmisión.
3-1
111.2. INTERFAZ ENTRE LA PC Y LA TARJETA TRANSMISORA
Las interfaces son una parte muy importante en un sistema de comunicaciones, ya que permiten la transferencia de datos entre dispositivos que, de otra manera, serían incompatibles [33]. La interfaz serie asíncrona es el dispositivo utilizado para la comunicación entre la computadora y la tarjeta receptora KIT-EVAL-TX.
En la transmisión de información, cada byte se envía independientemente de los demás. Se transmiten 8 bits de datos de uno en uno comenzando con el menos significativo y van precedidos por un bit de START (inicio) y detrás de ellos se coloca un bit de STOP (parada), de acuerdo con las normas del formato estándar NRZ (Non Return to Zero) [34][35]. En el extremo receptor de la comunicación los caracteres se reconocen por sus bits de inicio y paro y no por el tiempo en llegar [36].
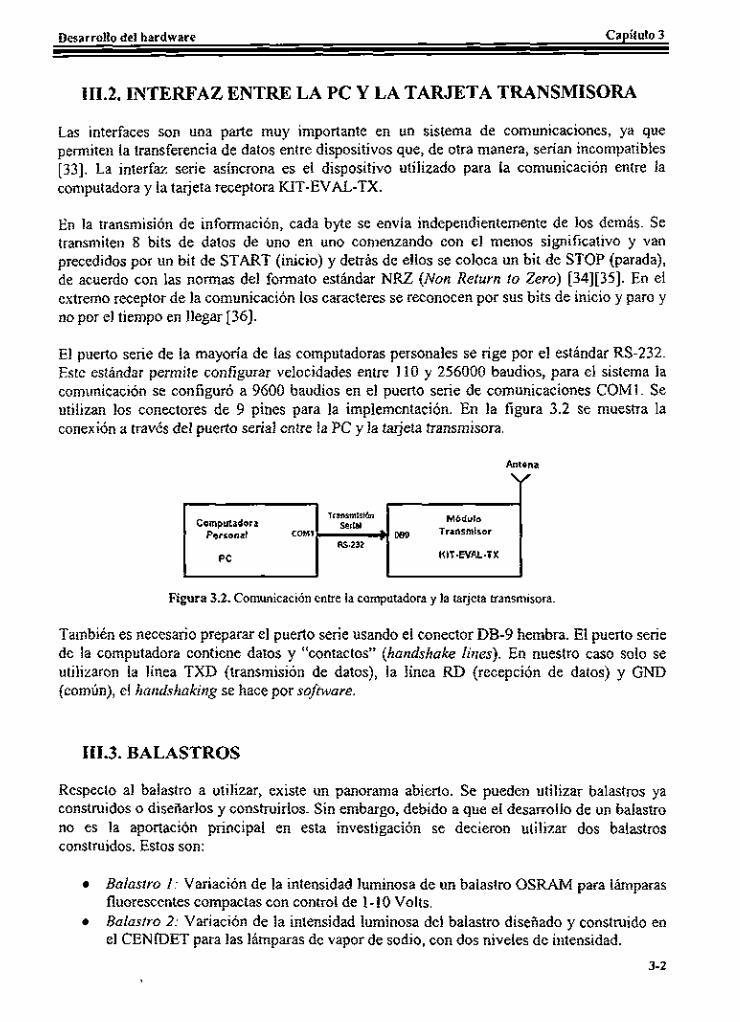
El puerto serie de la mayoría de las computadoras personales se rige por el estándar RS-232. Este estándar permite configurar velocidades entre 110 y 256000 baudios, para el sistema la comunicación se configuró a 9600 baudios en el puerto serie de comunicaciones COMl. Se utilizan los conectores de 9 pines para la implementación. En la figura 3.2 se muestra la conexión a través del puerto serial entre la PC y la tarjeta transmisora.
Antena
Y Módulo Tranrmldb
Computadora ~ y l l / Serid DBg Transmisor Personal
PC
RS.232 KIT-EVAL-TX
I I I I
Figura 3.2. Comunicación entre la computadora y la tarjeta transmisora
También es necesario preparar el puerto serie usando el conector DB-9 hembra. El puerto serie de la computadora contiene datos y “contactos” (handshake lines). En nuestro caso solo se utilizaron la línea TXD (transmisión de datos), la línea RD (recepción de datos) y GND (común), el handshaking se hace por software.
111.3. BALASTROS
Respecto al balastro a utilizar, existe un panorama abierto. Se pueden utilizar balastros ya construidos o diseñarlos y construirlos. Sin embargo, debido a que el desarrollo de un balastro no es la aportación principal en esta investigación se decieron utilizar dos balastros construidos. Estos son:
Balastro 1: Variación de la intensidad luminosa de un balastro OSRAM para lámparas fluorescentes compactas con control de 1-10 Volts. Balastro 2: Variación de la intensidad luminosa del balastro diseñado y construido en el CENIDET para las lámparas de vapor de sodio, con dos niveles de intensidad.
3-2

111.3.1. Balastro 1
Este es el balastro OSRAM QUICKTRONIC DIMMABLE DULUX D E y TIE lx26/230-240 DIM para lámparas fluorescentes compactas con interfase de 1-1OV. Permite desvanecer lámparas fluorescentes compactas del 10% a 100% de su flujo luminoso por medio de una interfase de 1 a 10 Volts de CD. En la figura 3.3 se muestra la fotografia del balastro:
Figura 3.3. Balastro OSRAM con control de 1-IOV.
El comportamiento del flujo luminoso en una lámpara fluorescente de 26 Watts conectada al balastro ante variaciones en el voltaje de control se muestra en la gráfica de la figura 3.4.
100 -
90 -
80
7 0 -
o 6 0 -
.- 50 ~
- 40 -
2 30-
20 -
10
8
5 C
O
U
.-
0 4 O 1 2 3 4 5 6 7 8 9 10
Voltaje de control (Volts)
Figura 3.4. Gráfica del flujo luminoso ante cambios en el voltaje de control para el balastro OSRAM.
Además tiene un arranque libre de parpadeo en cualquier posición del rango de iluminación. Obedece normas europeas de seguridad, funcionamiento y de EMC. Requiere un voltaje de alimentación de 230-240 VAC a frecuencias de 50-60 Hz. También cuenta con protección de sobre voltaje.
3-3
Dcsarrollo del hardware Capítulo 3
Bits de control
O0
111.3.2. Balastro 2
Este es un balastro de 70 Watts para lámparas de vapor de sodio de HID (Alta Intensidad de Descarga por sus siglas en inglés) diseñado y construido en el CENIDET. En la figura 3.5 se observa la fotografía del balastro:
Intensidad luminosa en la lámpara
Lámpara encendida durante 6 minutos a un 85% de intensidad luminosa, luego se apaga durante 2 minutos * Lámpara encendida a 100% de intensidad luminosa durante 6 minutos, luego se apaga durante 2 minutos * Lámpara encendida a 100% de intensidad durante 3 minutos, después encendida con un 85% de intensidad luminosa durante 3 minutos, luego se apaga durante 2 minutos *
Figura 3.5. Balastro de vapor de sodio.
Este balastro responde a 2 bits de control para seleccionar el modo de operación y de intensidad luminosa. Las opciones posibles para el control de la intensidad luminosa se muestran en la Tabla DI. 1 :
* El ciclo se repite una vez que se cumplen los dos minutos en los que estuvo apagada la lámpara.
111.4. ADAPTACIÓN A LOS BALASTROS
La información de salida de la tarjeta receptora KIT-EVAL-RX no se acopla directamente a los balastros, para ello es necesaria una etapa de control y de interfaz para cada uno de ellos. La etapa de control se encargará de interpretar la información digital recibida por el receptor y ejecutar una acción de respuesta sobre el balastro, esta etapa se realiza con un microcontrolador. Pero para ejercer esta acción de respuesta se requiere una etapa de
3-4
adaptación entre el microcontrolador y el balastro. La etapa de adaptación será distinta para cada uno ya que tienen características de control diferentes: el balastro OSRAM requiere un voltaje de control de 1 a 10 Volts para el control de la intensidad luminosa mientras que el balastro de HID requiere dos señales lógicas para seleccionar su modo de operación.
111.4.1. Generador del voltaje de control para el balastro OSRAM
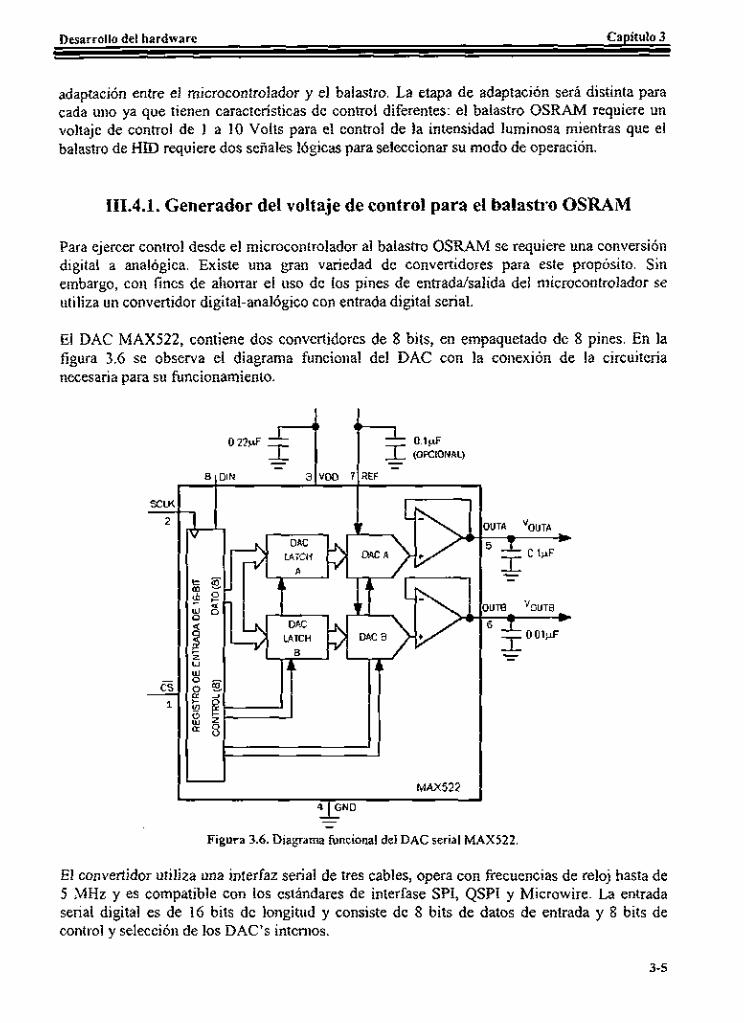
Para ejercer control desde el microcontrolador al balastro OSRAM se requiere una conversión digital a analógica. Existe una gran variedad de convertidores para este propósito. Sin embargo, con fines de ahorrar el uso de los pines de entraddsalida del microcontrolador se utiliza un convertidor digital-analógico con entrada digital serial.
El DAC MAX522, contiene dos convertidores de 8 bits, en empaquetado de 8 pines. En la figura 3.6 se observa el diagrama funcional del DAC con la conexión de la circuitería necesaria para su funcionamiento.
-L 0 . 1 ~ I (OPCIONAL)
)UTA "OUTA
- -
lUT6 "OUTB
61 I O o'irF - -
MAX522 I
4 GND - - Figura 3.6. Diagrama funcional del DAC serial MAX522.
El Convertidor utiliza una interfaz serial de tres cables, opera con frecuencias de reloj hasta de 5 MHz y es compatible con los estándares de interfase SPI, QSPI y Microwire. La entrada serial digital es de 16 bits de longitud y consiste de 8 bits de datos de entrada y 8 bits de control y selección de los DAC's internos.
3-5
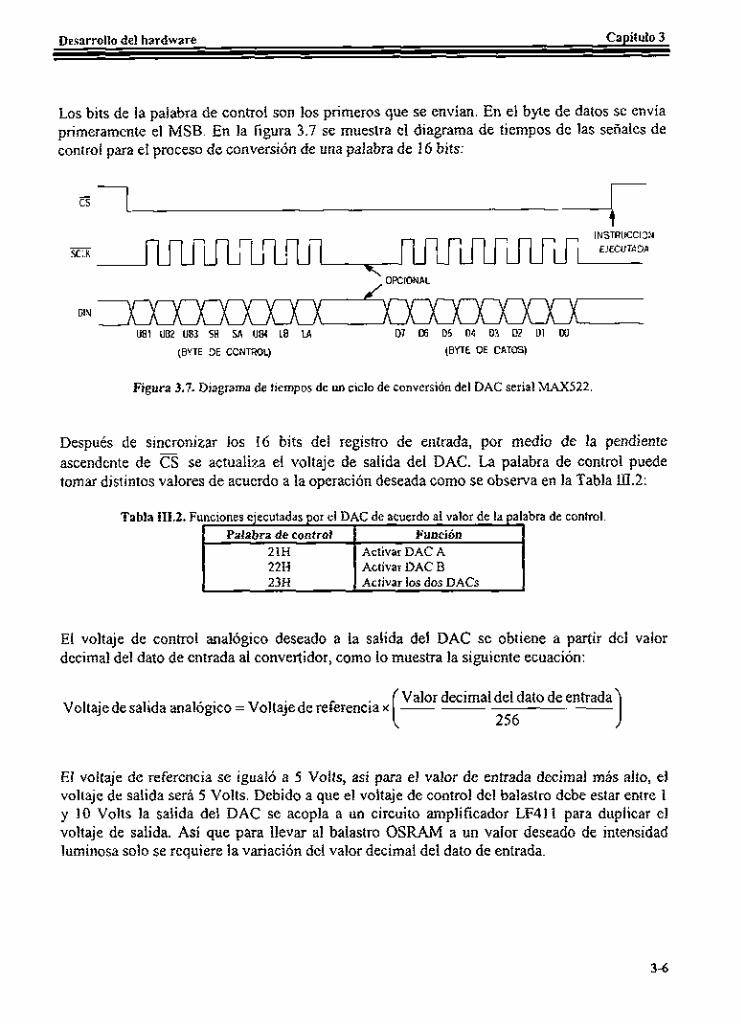
Los bits de la palabra de control son los primeros que se envían. En el byte de datos se envía primeramente el MSB. En la figura 3.7 se muestra el diagrama de tiempos de las señales de control para el proceso de conversión de una palabra de 16 bits:
22n 23H
INSTRUCCION EJECUTADA -
X1.K .*,
Activar DAC B Activar los dos DACs
. , OPCIONAL /
DIN x UB1 U02 UB3 SH SA UE4 LB LA DI DS D5 04 03 E2 O1 W
(BYTE DE CONTROL] [BYTE DE DATOS)
Figura 3.7. Diagrama de tiempos de un ciclo de conversión del DAC serial MAX522
Después de sincronizar los 16 bits del registro de entrada, por medio de la pendiente ascendente de a se actualiza el voltaje de salida del DAC. La palabra de control puede tomar distintos valores de acuerdo a la operación deseada como se observa en la Tabla Lü.2:
Tabla 111.2. Funciones ejecutadas por el DAC de acuerdo al valor de la palabra de control Palabra de control I Función
21H I Activar DAC A I
El voltaje de control analógico deseado a la salida del DAC se obtiene a partir del valor decimal del dato de entrada al convertidor, como lo muestra la siguiente ecuación:
Valor decimal del dato de entrada
256 Voltaje de salida analógico = Voltaje de referencia x
El voltaje de referencia se igualó a 5 Volts, así para el valor de entrada decimal más alto, el voltaje de salida será 5 Volts. Debido a que el voltaje de control del balastro debe estar entre 1 y 10 Volts la salida del DAC se acopla a un circuito amplificador LF411 para duplicar el voltaje de salida. Así que para llevar al balastro OSRAM a un valor deseado de intensidad luminosa solo se requiere la variación del valor decimal del dato de entrada.
3-6
Desarrollo del hardware Capitulo 3
111.4.2. Circuito de acondicionamiento para el balastro de HID
La elección de las opciones posibles de operación de la lámpara se realiza con los dos bits más significativos (B6 y B7) del registro de salida del microcontrolador. Esto se puede observar en la Tabla IIi.3:
Por lo cual se tendrá un intervalo amplio de valores disponibles para seleccionar cada opción de operación (Únicamente si los otros bits no se están usando para otros fines).
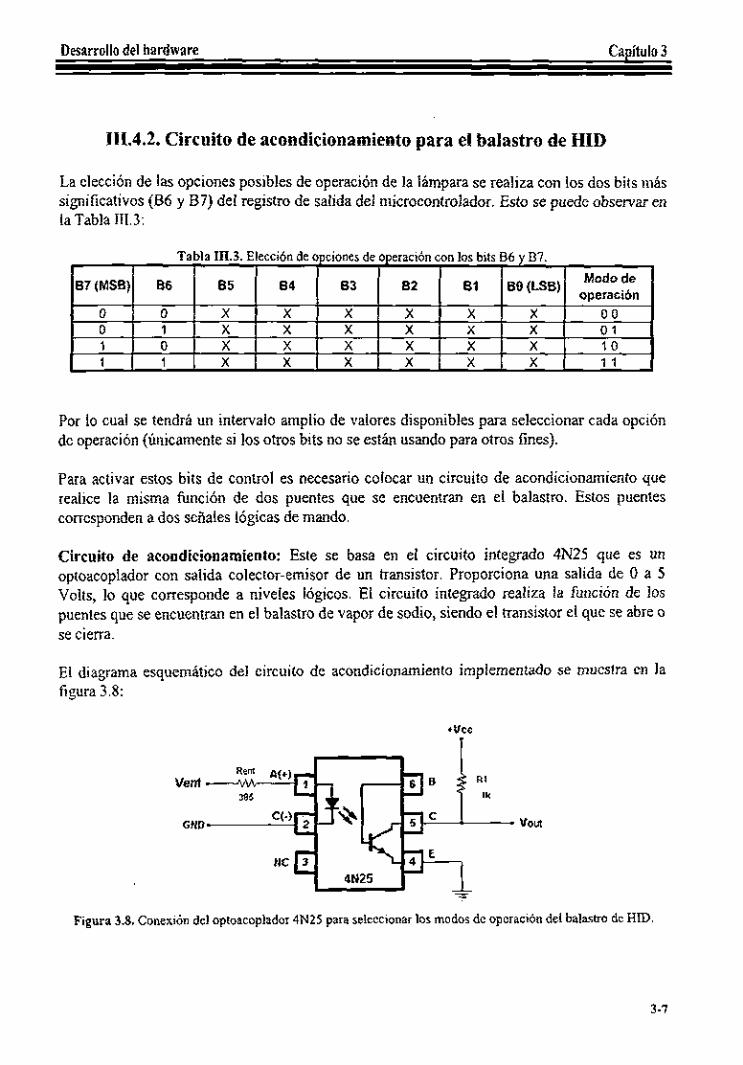
Para activar estos bits de control es necesario colocar un circuito de acondicionamiento que realice la misma función de dos puentes que se encuentran en el balastro. Estos puentes corresponden a dos señales lógicas de mando.
Circuito de acondicionamiento: Este se basa en el circuito integrado 4N25 que es un optoacoplador con salida colector-emisor de un transistor. Proporciona una salida de O a 5 Volts, lo que corresponde a niveles lógicos. El circuito integrado realiza la función de los puentes que se encuentran en el balastro de vapor de sodio, siendo el transistor el que se abre o se cierra.
El diagrama esquemático del circuito de acondicionamiento implementado se muestra en la figura 3.8:
+vcc
vout
- -
+vcc
vout
- - Figura 3.8. Conexión del optoacoplador 4N25 para seleccionar los modos de operación del balastro de HID
3-1
Desarrollo del hardware Capitulo 3
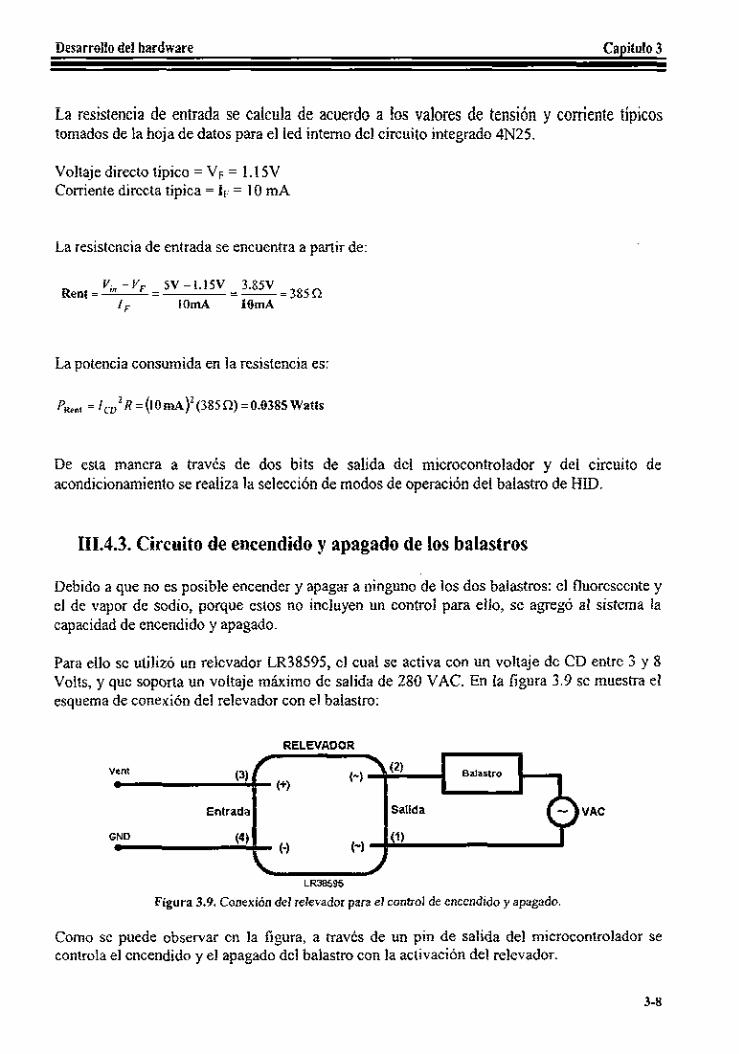
La resistencia de entrada se calcula de acuerdo a los valores de tensión y corriente típicos tomados de la hoja de datos para el led interno del circuito integrado 4N25.
Voltaje directo típico = VF = 1.15V Comente directa típica = IF = 10 mA
La resistencia de entrada se encuentra a partir de:
La potencia consumida en la resistencia es:
Pnen, = I,*R = (lOmA)2(385 n) =0.0385 Watts
De esta manera a través de dos bits de salida del microcontrolador y del circuito de acondicionamiento se realiza la selección de modos de operación del balastro de HID.
111.4.3. Circuito de encendido y apagado de los balastros
Debido a que no es posible encender y apagar a ninguno de los dos balastros: el fluorescente y el de vapor de sodio, porque estos no incluyen un control para ello, se agregó al sistema la capacidad de encendido y apagado.
Para ello se utilizó un relevador LR38595, el cual se activa con un voltaje de CD entre 3 y 8 Volts, y que soporta un voltaje máximo de salida de 280 VAC. En la figura 3.9 se muestra el esquema de conexión del relevador con el balastro:
RELEVADOR
vent
Entrada Salida
GND
LR38595
Figura 3.9. Conexión del relevador para el control de encendido y apagado.
Como se puede observar en la figura, a través de un pin de salida del microcontrolador se controla el encendido y el apagado del balastro con la activación del relevador.
3-8
Desarrollo del hardsare Capítulo 3
111.5. SELECCIÓN DEL MICROCONTROLADOR
La distribución de funciones entre los componentes de un sistema de control basado en computadora como módulo central lo hace más confiable, además disminuye su costo, el procesamiento y la memoria necesarios.
La implementación en un microcontrolador (pC) del control de la información que se recibe desde el transmisor permite tener una gran versatilidad para modificar el algoritmo de control y hacer los ajustes, mejoras y modificaciones que sean necesarias, sin tener que graduar o cambiar elementos.
El microcontrolador debe ser pequeño e incluir dentro de su arquitectura memoria de programa FLASH o EEPROM, memoria de acceso aleatorio (RAM), memoria EEPROM de datos y contadores/temporizadores), para contar con los requisitos fundamentales para resolver una aplicación.
El microcontrolador, como la unidad de control de la etapa de recepción, debe interpretar la información recibida proveniente del transmisor. Esta se encuentra en el formato del estándar RS-232, por lo que el microcontrolador debe tener un módulo USART (por sus siglas en ingles: Transmisor Receptor Asíncrono Síncrono Universal) para la entrada de datos como principal requisito.
Este módulo es uno de los dos módulos seriales de comunicación, el otro es el modulo SSP. El USART es también conocido como Interfase Serial de Comunicaciones SCI. Puede ser configurado:
Como un sistema asíncrono duplex: Para comunicación en forma bidireccional con dispositivos periféricos tales como una terminal CRT y computadoras personales. Como un sistema sincrono semidúplex: Es para comunicarse con dispositivos periféricos tales como circuitos integrados A/D o D/A, EEPROMS, etc.).
En conformidad con estas necesidades, se eligió el microcontrolador PIC16F628, el cual cumple con los requerimientos anteriores, además cuenta con un módulo comparador/captura y un generador PWM [37]. Es necesaria la lectura de bibliografia relacionada a este microcontrolador para el entendimiento de todo lo relacionado a su arquitectura, su programación y sus aplicaciones [37-421.
El PIC16F628 de 18 pines pertenece a la familia de microcontroladores PIC de la gama media, que se identifica por tener como memoria de programa una de tipo FLASH y una sene de recursos semejantes a los modelos más potentes (gama alta).
En la figura 3.10 se muestra la conexión del microcontrolador con los requerimientos principales (la tensión de alimentación, el cristal de reloj externo y el circuito generador del Reset) para realizar cualquier aplicación posible.
3-9
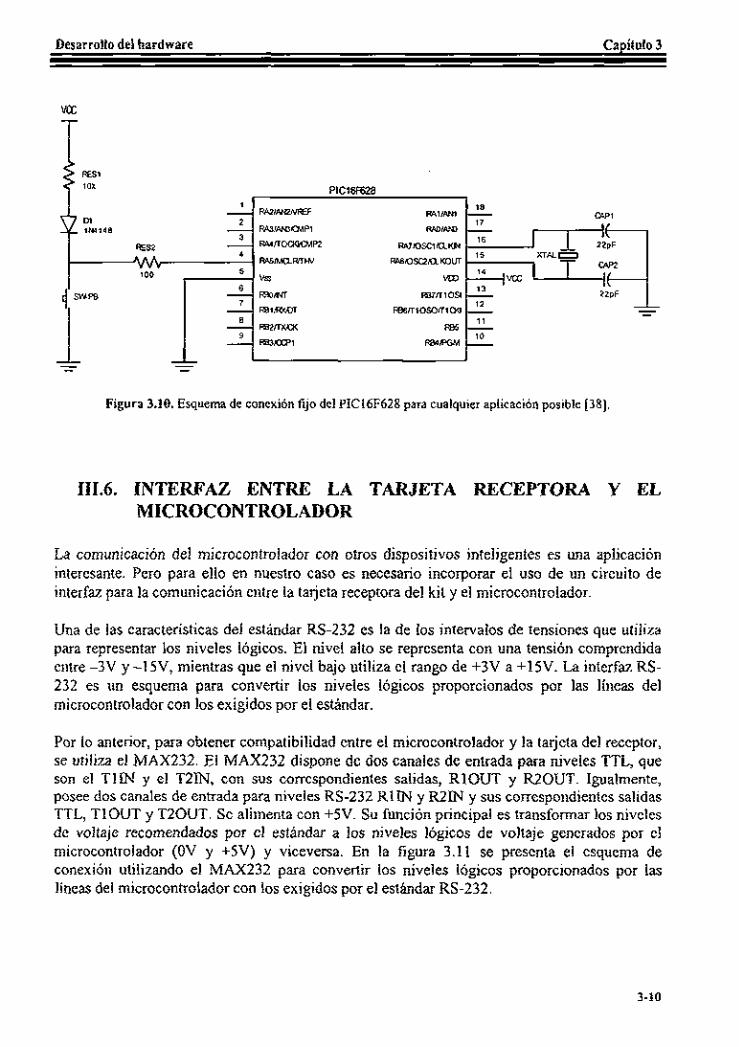
Desarrollo del hardware Capítulo 3
T
Figura 3.10. Esquema de conexión fijo del PIC16F628 para cualquier aplicación posible [38].
111.6. INTEFWAZ ENTRE LA TARJETA RECEPTORA Y EL MICROCONTROLADOR
La comunicación del microcontrolador con otros dispositivos inteligentes es una aplicación interesante. Pero para ello en nuestro caso es necesario incorporar el uso de un circuito de interfaz para la comunicación entre la tarjeta receptora del kit y el microcontrolador.
Una de las características del estándar RS-232 es la de los intervalos de tensiones que utiliza para representar los niveles lógicos. El nivel alto se representa con una tensión comprendida entre -3V y -15V, mientras que el nivel bajo utiliza el rango de +3V a +15V. La interfaz RS- 232 es un esquema para convertir los niveles lógicos proporcionados por las líneas del microcontrolador con los exigidos por el estándar.
Por lo anterior, para obtener compatibilidad entre el microcontrolador y la tarjeta del receptor, se utiliza el MAX232. El MAX232 dispone de dos canales de entrada para niveles TTL, que son el TlIN y el T2iN, con sus correspondientes salidas, RlOUT y R20UT. Igualmente, posee dos canales de entrada para niveles RS-232 RliN y WIN y sus correspondientes salidas TTL, TlOUT y T20UT. Se alimenta con +5V. Su función principal es transformar los niveles de voltaje recomendados por el estándar a los niveles lógicos de voltaje generados por el microcontrolador (OV y +5V) y viceversa. En la figura 3.11 se presenta el esquema de conexión utilizando el MAX232 para convertir los níveles lógicos proporcionados por las líneas del microcontrolador con los exigidos por el estándar RS-232.
3-10

Desarrollo del hardware Capitulo 3
CAP1 I u F
_ _ MAX232 F. -
CAP2 I 16
2 15 vs+ GN)
a-
- a+ vcc , I vcc
Vcc I : I 3 TIOUT
111.7. DIAGRAMAS DE CONEXIÓN DE CIRCUITOS
4
6
7 - 8 -
w 4
Una vez que se ha definido el módulo de interfaz entre la tarjeta de recepción y el microcontrolador queda completo el hardware necesario para la implementación del sistema de control de iluminación por radiofrecuencia. Teniendo como módulo de control al PIC16F628 y como interfaz hacía la tarjeta receptora KIT-EVAL-RX al MAX232. Y al relevador LR38595 para el control del encendido y apagado del balastro.
Diagrama 1: Tarjeta de control e interfaz del balastro OSRAM Con la inclusión del DAC como interfaz entre el microcontrolador y el balastro para la conversión digital-analógica del voltaje de control de 1 a 10 Volts se completa el hardware necesario para la variación de la intensidad luminosa del balastro OSRAM. El diagrama de conexión de la tarjeta de control e interfaz para el balastro OSRAM aparece en la página 3-12.
o+ R IN o- R1 OW
V* T I N
TZOUT
WIN
I- - T21N - - 9 worn -
Diagrama 2: Tarjeta de control e interfaz del balastro de HID Con el 4N2S queda completo el hardware requerido para el control del funcionamiento para este balastro. En la página 3-13 aparece el diagrama de conexión de la tarjeta de control e interfaz para el balastro de HID.
Diagrama 3: Fuente de alimentación Las tarjetas de control e interfaz requieren tres niveles de voltaje para funcionar adecuadamente; *12V para alimentar el amplificador operacional que se encuentra en la tarjeta para el control del balastro fluorescente y +5V para alimentar a la circuitena restante. En la página 3-14 se puede observar el diagrama de la fuente de alimentación construida para energizar las tarjetas. La fuente requiere un voltaje de alimentación de 120 VAC. Además se debe tener contactos de 220 VAC para energizar los balastros.
3-11
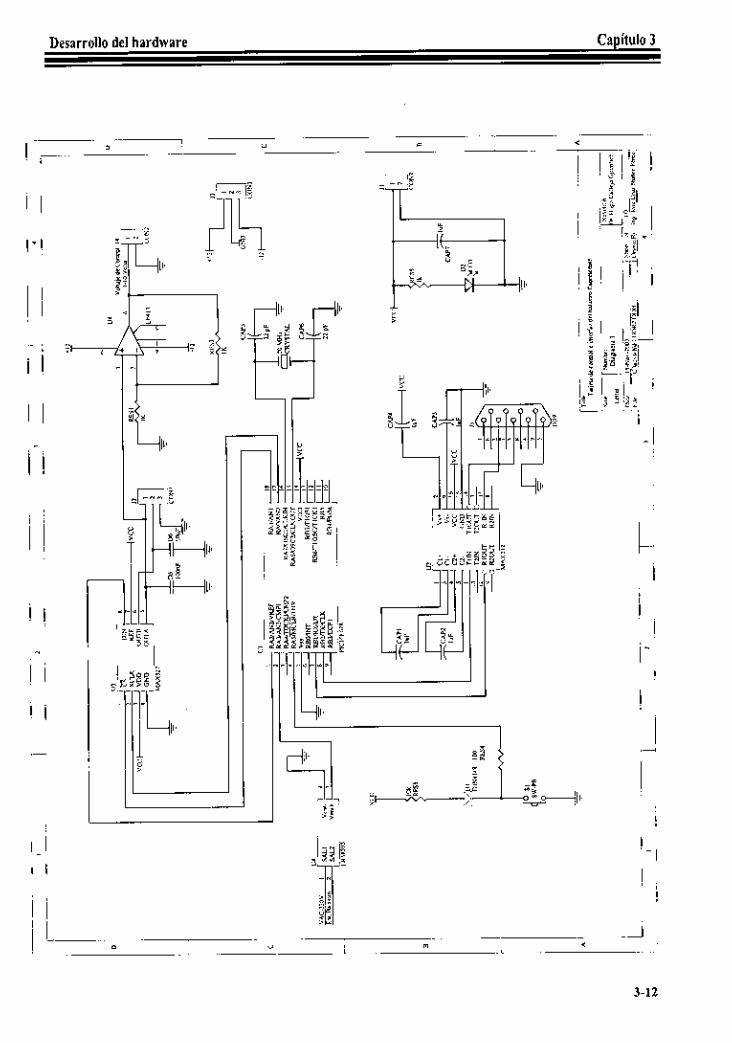
Desarrollo del hardware Capítulo 3
" I Y I I
0 I Y I m 1 4
3-12
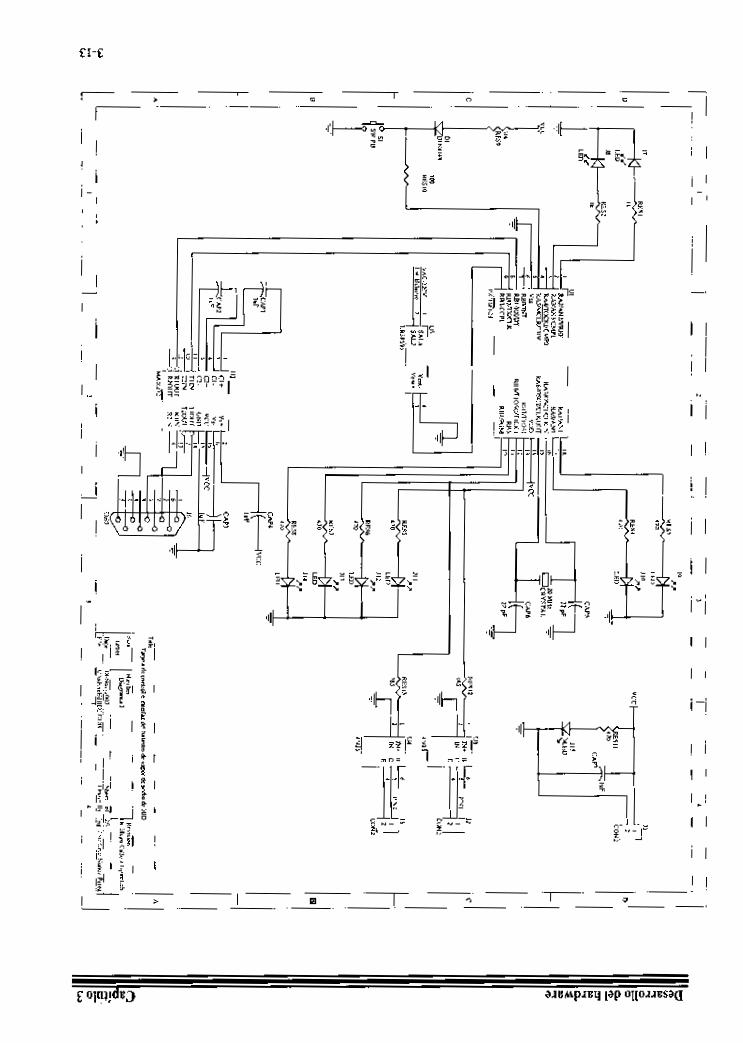
€I-€
I > I m I " l o
I u I > I l o
1
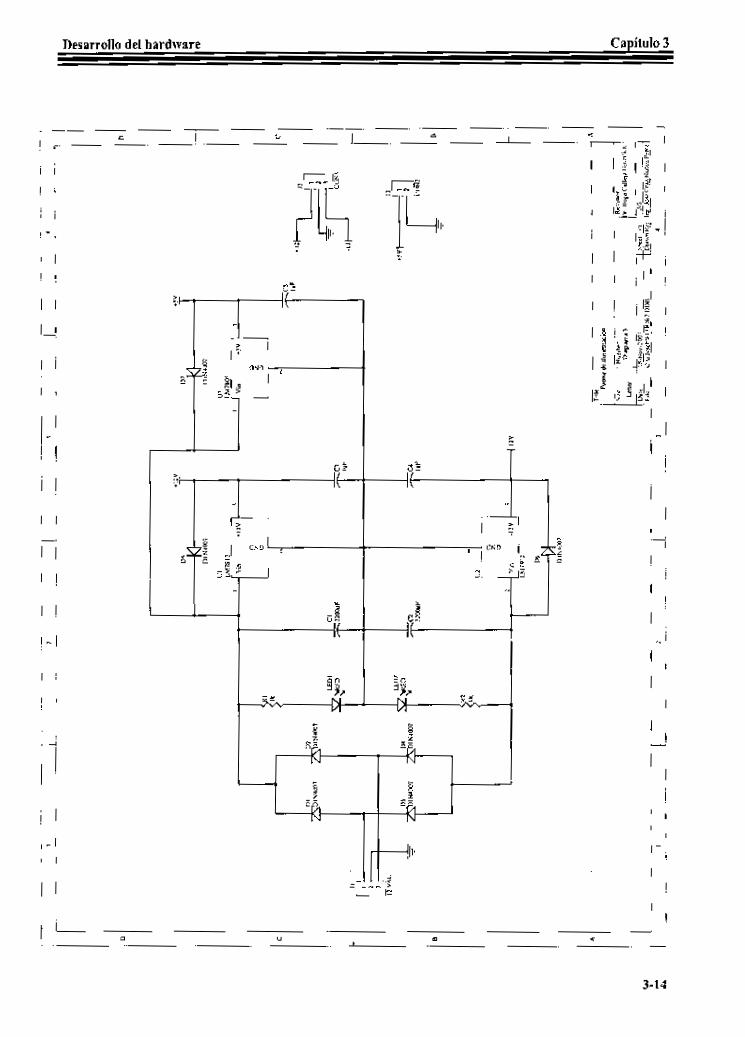
Cnpitulo 3 Desarrollo del hardware
3-14
fi Ca ítulo3
Los elementos que integran el sistema de control de iluminación por RF se resumen a continuación:
Canal de comunicaciones (RF): compartido entre el módulo amo y los esclavos, a través del cual se realiza la transferencia de información.
Módulo de control amo: es el encargado de transmitir la información para realizar los encendidos, apagados y el control de la intensidad luminosa de las lámparas para realizar las correcciones deseadas o requeridas. Del lado del transmisor solo es necesario tener una computadora personal PC conectada con la tarjeta transmisora KIT-EVAL-TX. En la computadora PC se tiene el programa de control y manejo del sistema.
Módulo de control esclavo: tiene como función recibir la información para controlar la intensidad luminosa de las lámparas. En la parte del receptor estará la tarjeta receptora KIT- EVAL-RX conectada a las tarjetas de control e interfaz para los balastros, además de las lámparas. El receptor contiene dos tarjetas de control e interfaz, la primera de ellos corresponde al balastro OSRAM. La segunda tarjeta está conformada para el control del balastro de HID. El corazón de las tarjetas de control e interfaz es el microcontrolador PIC16F628. En el microcontrolador estará el programa que interpretará la información recibida del transmisor y como resultado ejecutará una acción sobre los balastros. Al microcontrolador se le añaden los circuitos de acondicionamiento de la señal de entrada proveniente del transmisor y de las señales de salida dirigidas a los balastros.
El microcontrolador del receptor recolecta la información, la decodifica, la procesa, confirma que la información fue correctamente recibida, la almacena y posteriormente transmite hacía el balastro.
El sistema de control implementa un par de canales de comunicación asíncronos de 9600 baudios con el estándar RS-232, el primero de estos canales es la interfase de comunicación entre la PC y la tarjeta transmisora y el segundo es la interfase entre la tarjeta receptora y el microcontrolador.
En la figura 3.12 se observa el diagrama de conexión del hardware del sistema desarrollado. Debido a que se dispone únicamente de una tarjeta receptora solo se puede conectar una tarjeta de interfaz y no las dos a la vez. En la figura 3.13 se muestra la fotografía del sistema de control de iluminación de lámparas de fluorescentes y de HID por RF.
3-15
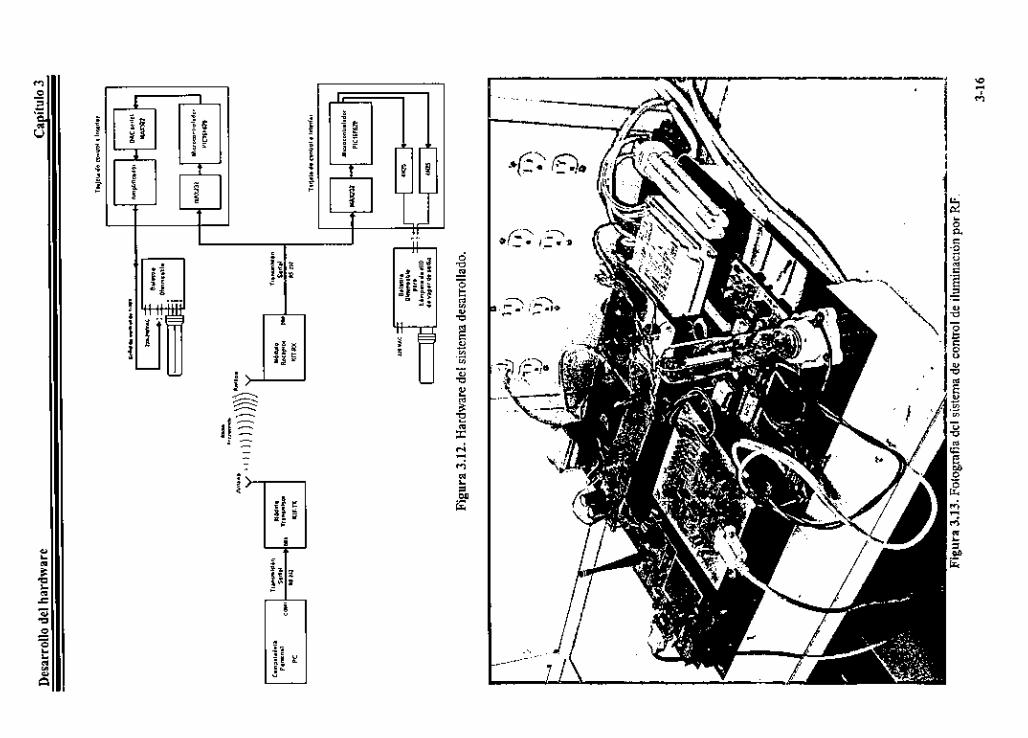
L i¿
a M
CAP~TULO 4
Desarrollo del software
rv.1. INTRODUCCI~N
Es necesario establecer el programa de control en el amo para el control de la información desde la computadora hacía la tarjeta de transmisión. Por el lado de la tarjeta receptora se requiere establecer un programa en el microcontrolador que ejecute las operaciones de recepción de los datos provenientes desde el transmisor y el control de la iluminación del balastro deseado.
Como se mencionó en el capítulo 1, el protocolo del sistema utilizado fue el amo-esclavo. El cual consiste en tener un determinado número de esclavos, controlados por un módulo amo, en donde a cada esclavo se le asigna una dirección para que solo respondan al amo cuando sean direccionados por él.
Bajo condiciones iniciales del sistema todos los esclavos estarán en modo recepción esperando ser direccionados. El sistema central empezará a direccionar a los esclavos en el momento en que se lo indique el usuario. Cuando un esclavo observe que es djreccionado se iniciará el protocolo de comunicaciones.
En cuanto al direccionamiento de los esclavos existen vanas alternativas:
a) Direccionamiento puntual b) Direccionamiento por renglón c) Direccionamiento por columna d) Direccionamiento general
Por tener mejor capacidad de direccionamiento por grupos el método elegido para el direccionamiento del sistema fue el de renglones y columnas.
4-1

Desarrollo del software Capítulo 4
R , E N , G L , O N , E C
Respecto al número de esclavos a direccionar, por comodidad se decidió pensar en el direccionamiento de un arreglo matricial de 6 renglones y 6 columnas para un total de 36 lámparas. En la figura 4.1 se muestra el arreglo matricial de 6x6:
- C O L U M N A S
. . . . I
Figura 4.1. Arreglo matricial de 36 lámparas.
De esta manera el sistema tiene la capacidad de direccionamiento de:
e
Dada
Renglones de lámparas Columnas de lámparas Lámparas individuales Grupos de lámparas variables de 2, 3, 4, 5, 6, 8, 9, 10, 12, 15, 16, 18, 20, 24, 25, 30 y 36 lámparas
la importancia de la transferencia de información, es necesaria la creación de un protocolo de comunicación de RF lo suficientemente robusto a partir de un microcontrolador cuyo objetivo es interpretar los datos transferidos de forma inalámbrica desde una computadora hasta un balastro que manipula a una lámpara, para permitir el flujo ordenado de información entre los diferentes medios que conforman el sistema.
Como limitación adicional, el flujo de información es inidireccional, ya que los balastros no responden.
El software y el protocolo de comunicaciones deben permitir:
1. Identificar el tipo de balastro 2. Direccionar uno o más balastros: balastro individual, balastros en columna, balastros
en renglón, un grupo de balastros y todos los balastros. 3. Operar sobre el balastro: encender y apagar; graduar el nivel de iluminación dentro de
los limites permitidos; seleccionar el modo de operación. 4. Recuperación ante condiciones de operación anómalas (falla de energía eléctrica,
interrupción en las comunicaciones).
4-2

Desarrollo del software Capitulo 4
Además el protocolo debe tener las siguientes características:
1. Incluir mecanismos confiables que permitan asegurar la integridad de la información (detección de errores).
2. Incluir mecanismos que impidan que el sistema se bloquee en caso de que se interrumpa una comunicación en curso (detección de tiempo límite).
1v.2. INTEGRIDAD DE LA INFORMACI~N
El objetivo de un sistema de transmisión de datos es la distribución de la información sin errores. La necesidad de enviar datos a través de grandes distancias y en ambientes en los que frecuentemente se encuentran fuentes de ruido y de interferencias, ha obligado al desarrollo de circuitos integrados especializados en la transmisión de datos. Sin embargo, todos los productos de RF están en riesgo de efectos de interferencia a pesar de diseños cuidadosos.
La comunicación entre el Amo y los Esclavos es a través de radiofrecuencia utilizando el MDEV-916-ES. Por tal motivo de acuerdo al ambiente en el que se encuentre el transmisor y el receptor es necesario prever las manifestaciones de interferencia para que sean atendidas y tomadas en cuenta, y establecer alguna forma de ordenar los dígitos binarios o bytes que se utilizan para representar la información del proceso y puedan ser transmitidos con seguridad y velocidad sobre el medio de comunicación.
La integridad de la información que se transfiere por el canal de comunicaciones depende de la sincronización correcta entre el amo y el esclavo. La comunicación se establece serialmente a una velocidad de 9600 baudios con el kit a partir de un protocolo que controla la transmisión de información al microcontrolador del receptor.
IV.2.1. Detección de errores
La detección y corrección de errores se refiere a la capacidad que tienen algunos sistemas para identificar errores durante una transmisión y para volver a enviar los datos que parecen haberse dañado en el tránsito. Para que la corrección de errores funcione, el transmisor y el receptor deben apegarse al mismo estándar de detección y corrección.
En los sistemas de transmisión simple, donde no existe una comunicación bidireccional, no es posible solicitar retransmisiones cuando se presentan errores en la transmisión por lo que resulta muy necesaria la incorporación de técnicas de detección de errores.
Es posible desarrollar metodologías de transmisión de datos que proporcionen un alto rendimiento de detección y corrección de errores. La mejor manera de detectar y corregir errores es enviando bits adicionales en el mensaje [43]. Mientras mayor es la cantidad de bits adicionales puede lograrse mayor protección contra errores, sin embargo al elevar la
4-3
protección, se reduce el procesamiento de datos útiles, por lo que debe existir un equilibrio en la cantidad de bits adicionales.
La detección del error y la retransmisión es la manera más sencilla y más efectiva para reducir los errores en la transmisión de datos. Por lo que, en la mayoría de los casos un diseñador querrá emplear alguna forma de corrección y detección de errores cuando se desarrollan protocolos para ambientes inalámbncos.
Existen varios métodos usados para la detección de errores. El método más comúnmente usado es el de paridad. Sin embargo, el método de paridad no funciona en donde existan dobles errores en la transmisión (dos bits que contengan algún error), ya que dos errores no cambiarían la condición de impar o par del número de unos que hay en el código [44]. En estos casos, la alternativa más recomendada es el empleo de códigos polinomiales.
Los códigos polinomiales se utilizan en estructuras de transmisión de marcos o bloques. Con este método se genera una serie de dígitos verificadores de acuerdo ai contenido del bloque de datos. Esta serie de dígitos se conoce como bytes redundantes y se añade al final del mensaje transmitido. Una vez que llega el bloque de información al receptor, se realiza una operación de verificación semejante a la efectuada por el transmisor en el contenido completo del bloque; de acuerdo al resultado de la operación se conoce si se presentaron errores en la transmisión.
Este método basado en bytes redundantes como verificadores de error se llama Secuencia de Verificación de Marco (Frame Check Sequence FCS) y también es conocida como Verificación por Redundancia Cíclica (Cyclic Redundancy Check CRC) [23].
Hay dos polinomios de 16 bits que se utilizan ampliamente para la detección de errores, estos son:
CRC - CCITT 3 xL6 + x’* + x s + 1 c R C - 1 6 2 ~ ’ ~ +x” + x z +1
Estos polinomios tienen las siguientes características:
Detectan todos los errores simples posibles Detectan todos los errores dobles posibles Detectan todas las cadenas erróneas posibles de 16 bits o menores Detectan todas las cadenas erróneas posibles de 17 bits con un porcentaje de eficiencia del 99.997% Detectan todas las cadenas erróneas posibles mayores de 17 bits con un porcentaje de eficiencia del 99.9984% [22]
Con estas características podemos ver que los polinomios CRC-CCITT y el CRC-I6 tienen la probabilidad de permitir el paso de un bit erróneo por cada lo4 transmitidos, lo cual en relación con otros métodos (prueba de paridad, claves de relación constante, etc.) es mucho mejor.
4-4
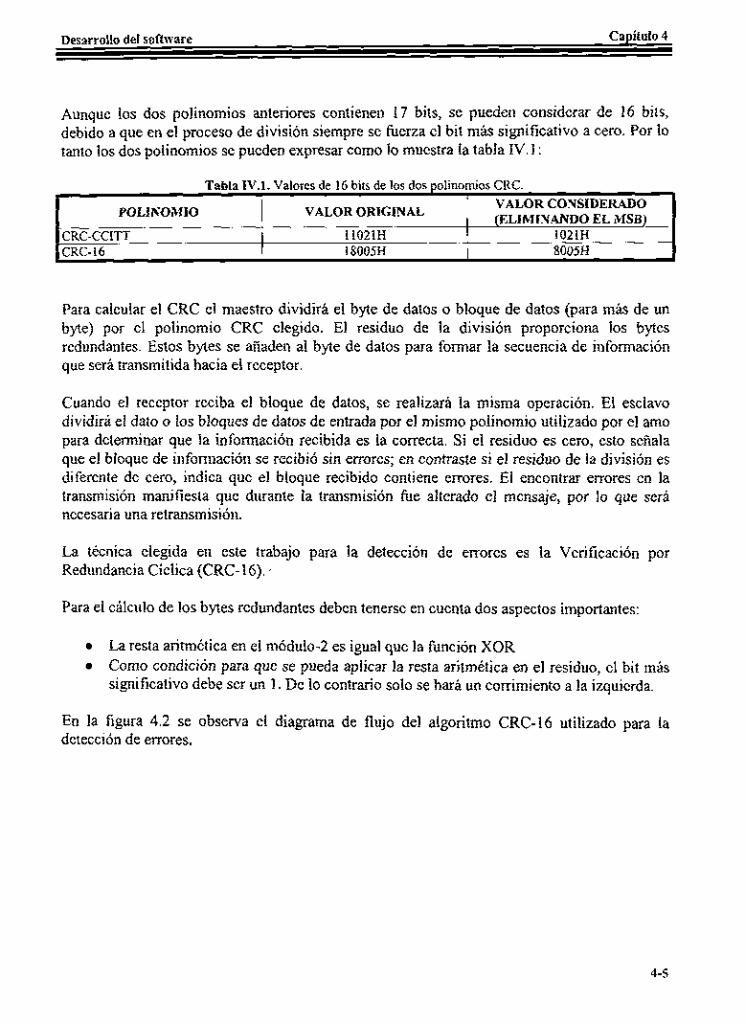
Desarrollo del software Capítulo 4
POLiNOMIO VALOR ORIGINAL
CRC-CCITT 11021H CRC-16 18005H
Aunque los dos polinomios anteriores contienen 17 bits, se pueden considerar de 16 bits, debido a que en el proceso de división siempre se fuerza el bit más significativo a cero. Por lo tanto los dos polinomios se pueden expresar como lo muestra la tabla IV. 1:
VALOR CONSIDERADO (ELIMINANDO EL MSB)
1021H 8005H
Para calcular el CRC el maestro dividirá el byte de datos o bloque de datos (para más de un byte) por el polinomio CRC elegido. El residuo de la división proporciona los bytes redundantes. Estos bytes se añaden al byte de datos para formar la secuencia de información que será transmitida hacía el receptor.
Cuando el receptor reciba el bloque de datos, se realizará la misma operación. El esclavo dividirá el dato o los bloques de datos de entrada por el mismo polinomio utilizado por el amo para determinar que la información recibida es la correcta. Si el residuo es cero, esto señala que el bloque de información se recibió sin errores; en contraste si el residuo de la división es diferente de cero, indica que el bloque recibido contiene errores. El encontrar errores en la transmisión manifiesta que durante la transmisión fue alterado el mensaje, por lo que será necesaria una retransmisión.
La técnica elegida en este trabajo para la detección de errores es la Verificación por Redundancia Cíclica (CRC-16). I
Para el cálculo de los bytes redundantes deben tenerse en cuenta dos aspectos importantes:
La resta aritmética en el módulo-2 es igual que la función XOR Como condición para que se pueda aplicar la resta aritmética en el residuo, el bit más significativo debe ser un 1. De lo contrario solo se hará un corrimiento a la izquierda.
En la figura 4.2 se observa el diagrama de flujo del algoritmo CRC-16 utilizado para la detección de errores.
4-5
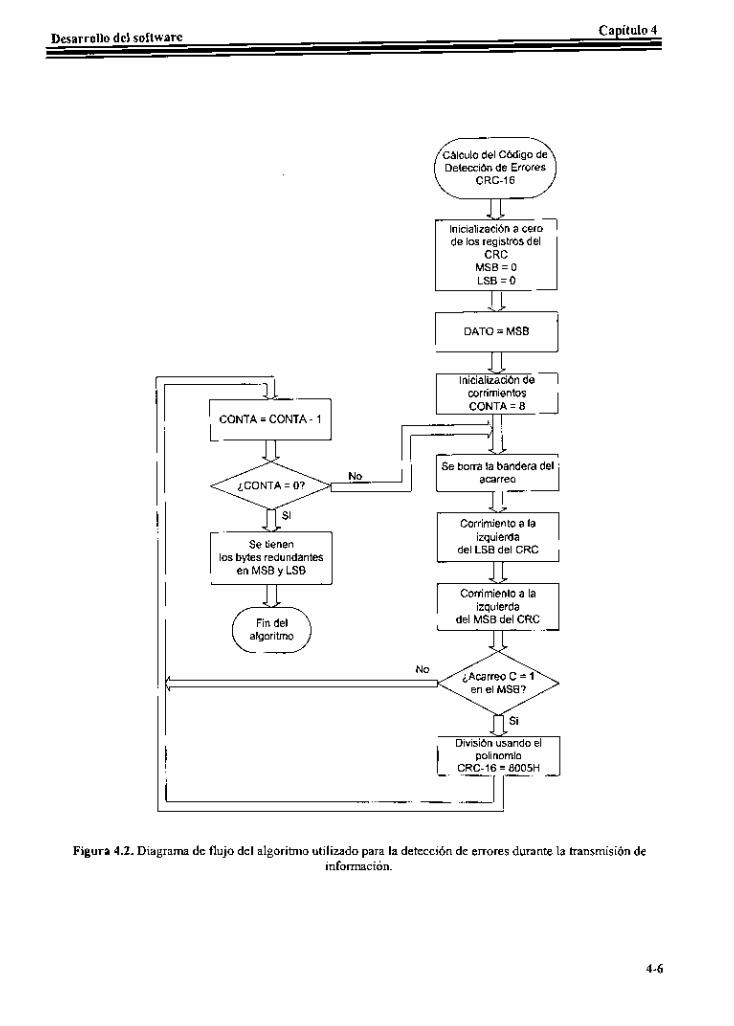
Capítulo 4 Desarrollo del software
Cálculo del Código de Detecci6n de Errores
CRC-I6
inicialización a cero de los registros del
MSü = O LSB = o
DATO = MSE
11 Inicializaci6n de
corrimientos CONTA = 8
CONTA = CONTA - 1
No
Se tienen los bytes redundanles i I I enMSüyLSB I
Se borra la bandera del
Corrimiento a la izquierda * Cornmienlo a la izquierda 1 deIMSBddCRC I
algoritmo
6 \i
1 Divisi6n usando el I polinomio
CRC-16 = 8005H
Figura 4.2. Diagrama de flujo del algoritmo utilizado para la detección de errores durante l a transmisión de información.
4-6
Capítulo 4 Desarrollo del software
1v.3. COMPARACI~N Y SELECCI~N DEL PROTOCOLO DE COMUNICACI~N
La inteadad de la información que se transfiere por el canal de comunicaciones depende de la sincronización correcta entre el Amo y el Esclavo [23]. Una vez que se define la conexión física para poder transmitir información entre los dispositivos o sistemas debe existir un formato para los datos y una estrategia de sincronización de cómo se envían y recepcionan los mensajes, incluyendo la detección y corrección de los errores, o sea se debe definir un protocolo de comunicación.
El protocolo de comunicación es uno de los aspectos que hay que tomar más en cuenta. Ya que es el método mediante el cual dos diferentes entidades se ponen de acuerdo para comunicarse. Si todos los productos de distintos proveedores se pueden comunicar con el mismo protocolo, ello lleva a la interoperatibilidad e integración de los dispositivos de adquisición de datos y control.
La estandarización de protocolos en la industria es un tema en permanente discusión, donde intervienen problemas técnicos y comerciales. Cada protocolo está optimizado para diferentes niveles de automatización y en consecuencia responden al interés de diferentes proveedores.
Cada protocolo tiene un rango de aplicación, fuera del mismo disminuye el rendimiento y aumenta la relación costoheneficio. En muchos casos no se trata de protocolos que compitan entre sí, sino que se complementan, cuando se trata de una arquitectura de un sistema de comunicación de varios niveles.
La ITU es un organismo internacional de expertos técnicos, responsable de desarrollar estándares de comunicación de datos para el mundo [27]. La ITU establece estándares y protocolos de comunicación en muchas áreas, de forma que un prototipo de comunicación por RF puede apegarse a diferentes estándares dependiendo de sus diferentes características y capacidades [33]. Por ejemplo, el protocolo MODBUS es utilizado en comunicaciones vía radio-modem, para cubrir en grandes distancias a los dispositivos de medición y control, como en el caso de los pozos de petróleo, gas y agua. Su velocidad es de 1200 baudios por radio y son mayores por cable. Otros protocolos permiten que cuando un dispositivo que desea transmitir determina que ningún otro dispositivo está transmitiendo en el medio, él tome el control del medio y envíe sus datos. Si otro dispositivo desea transmitir durante este tiempo, debe esperar hasta que el medio esté libre otra vez. Estos protocolos están hechos de acuerdo a las necesidades de las aplicaciones para las cuales fueron pensados.
Cualquier protocolo de comunicaciones para la capa de enlace datos del modelo OS1 (véase el Apéndice In) se puede aplicar en el desarrollo del sistema de este trabajo. Estos protocolos se basan en la transmisión de bloques o marcos de información, con un tiempo de espera entre transmisiones y se agrega la capacidad de detección de errores [35]. Dentro de los protocolos para la capa de enlace de datos sobresale el p p o de protocolos de HDLC (Control de Enlace de datos de Alto Nivel por sus siglas en inglés) [45][46]. La utilización de protocolos
4-7

Protocolo de sistema
De la comparación de los protocolos anteriores se puede notar que un elemento básico a considerar en el diseño de un protocolo de comunicación es la estructura del mensaje, constituyendo una unidad de información denominada Cuadro, Bloque o Datagrama.
La consideración del contenido y tamaño de la estructura del mensaje de acuerdo a las especificaciones necesarias para desarrollar la aplicación será la que determinará el protocolo de comunicación utilizado. La estructura del mensaje puede ser muy compleja si se involucran consideraciones de seguridad y protección de la información. Los componentes principales a considerar en la estructura del mensaje son generalmente los siguientes:
Comando de sincronización Comandos de Reconocimiento
Comando de solicitud de transmisión Comando de solicitud de recepción
Amo-Esclavo Amo-Esclavo Amo-Esclavo Amo-Esclavo Amo.Esclavo ~ o . ~ s c l a v o
4-8
Capítulo 4 Desarrollo del software
o
o
Comando de identificación de Dirección Valor o valores de la Dirección Comando de identificación de Dato Valor del Dato Valores del Código de Detección de Errores Comando de Detección de errores Comando de Fin de Transmisión Comando de Transmisión Correcta Comando de Transmisión Incorrecta Comando de Solicitud de retransmisión
IV.3.1. Diseño del protocolo de comunicación
Cabe mencionar que el protocolo desarrollado se realizó pensando en dar mayor robustez a la comunicación del sistema de control. Para el desarrollo del protocolo de comunicación, se seleccionaron los componentes básicos y esenciales para resolver la aplicación y atender las necesidades del sistema. Los componentes que se tomaron en cuenta para el diseño de la estructura del mensaje del protocolo de comunicación desarrollado fueron:
Comando de identificación de Renglón (SOH): Prepara al módulo de control del esclavo para señalarle que el byte corresponde al registro Renglón de la dirección.
Valor del registro Renglón: Dato correspondiente al valor numérico del Renglón de la dirección donde se ubica el esclavo que se desea controlar.
Comando de identificación de Columna (COH): Prepara al microcontrolador del esclavo para indicarle que el siguiente byte es el registro Columna,
Valor del registro Columna: Esta cantidad corresponde a la Columna donde se encuentra el esclavo que se desea manipular
Comando de identificación de Dato: Detecta el microcontrolador que el byte es un dato de control de intensidad luminosa.
Valores del código de detección de errores CRC-16: Posteriormente a la recepción del DATO llegan dos bytes encargados de verificar la existencia de errores en la transmisión.
Fin de Transmisión: Una vez que se transmite el último byte del CRC-16, el sistema de control amo finaliza la transmisión.
Detección de errores: Después de recibida la secuencia completa de información el esclavo salta a verificar la existencia de errores en la transmisión.
4-9
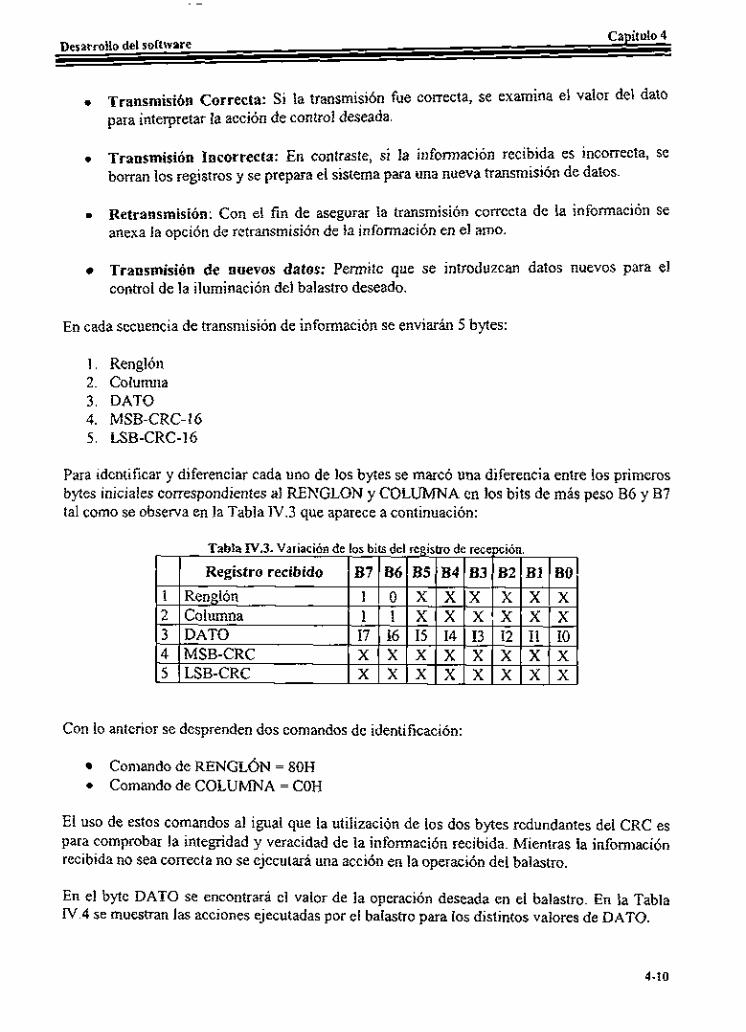
Capítulo 4 Desarrollo del software
o Transmisión Correcta: Si la transmisión fue correcta, se examina el valor del dato para interpretar la acción de control deseada.
Transmisión Incorrecta: En contraste, si la información recibida es incorrecta, se borran los registros y se prepara el sistema para una nueva transmisión de datos.
Retransmisión: Con el fin de asegurar la transmisión correcta de la información se anexa la opción de retransmisión de la información en el amo.
Transmisión de nuevos datos: Permite que se iniroduzcan datos nuevos para el control de la iluminación del balastro deseado.
o
o
En cada secuencia de transmisión de información se enviarán 5 bytes:
1. Renglón 2. Columna 3. DATO 4. MSB-CRC- 16 5. LSB-CRC-16
Para identificar y diferenciar cada uno de los bytes se marcó una diferencia entre los primeros bytes iniciales correspondientes al RENGLON y COLUMNA en los bits de más peso B6 y B7 tal como se observa en la Tabla IV.3 que aparece a continuación:
Con lo anterior se desprenden dos comandos de identificación:
0
Comando de RENGLÓN = 80H Comando de COLUMNA = COH
El uso de estos comandos al igual que la utilización de los dos bytes redundantes del CRC es para comprobar la integridad y veracidad de la información recibida. Mientras la información recibida no sea correcta no se ejecutara una acción en la operación del balastro.
En el byte DATO se encontrará el valor de la operación deseada en el balastro. En la Tabla IV.4 se muestran las acciones ejecutadas por el balastro para los distintos valores de DATO.
4-10
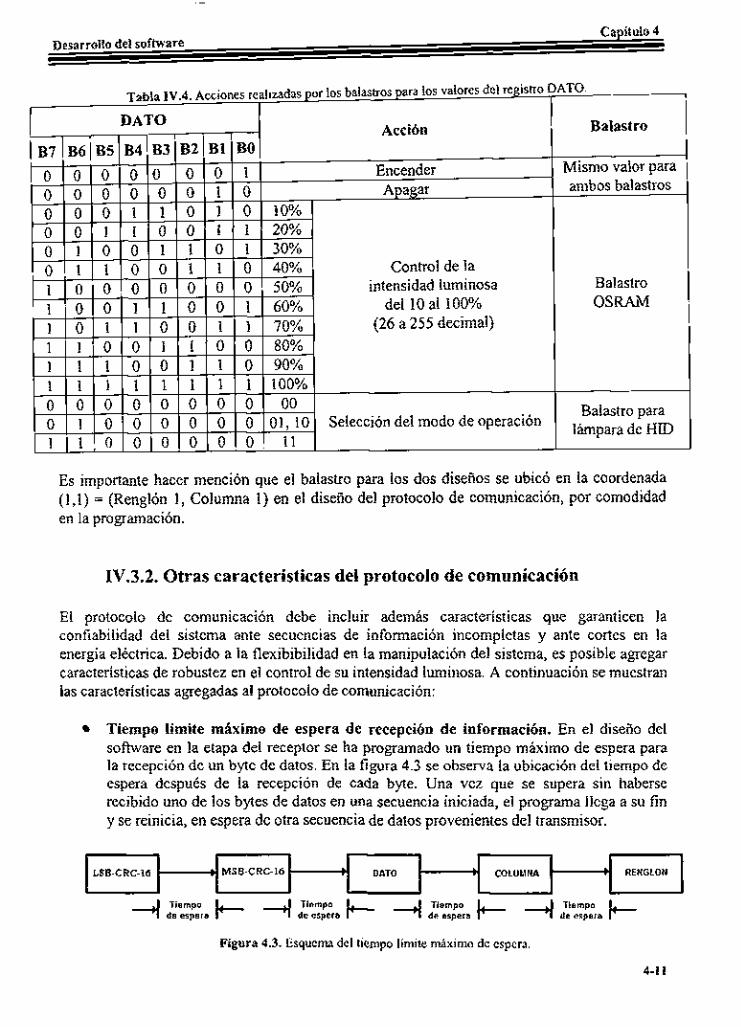
Capítulo 4 Desarrollo del software
LSB-CRC-I6
Es importante hacer mención que el balastro para los dos diseños se ubicó en la coordenada (1,l) = (Renglón 1, Columna 1) en el diseño del protocolo de comunicación, por comodidad en la programación.
MSB-CRC-I6 RENGLON
IV.3.2. Otras características del protocolo de comunicación
El protocolo de comunicación debe incluir además características que garanticen la confiabilidad del sistema ante secuencias de información incompletas y ante cortes en la energía eléctrica. Debido a la flexibibilidad en la manipulación del sistema, es posible agregar características de robustez en el control de su intensidad luminosa. A continuación se muestran las características agregadas al protocolo de comunicación:
Tiempo límite máximo de espera de recepción de información. En el diseño del software en la etapa del receptor se ha programado un tiempo máximo de espera para la recepción de un byte de datos. En la figura 4.3 se observa la ubicación del tiempo de espera después de la recepción de cada byte. Una vez que se supera sin haberse recibido uno de los bytes de datos en una secuencia iniciada, el programa llega a su fin y se reinicia, en espera de otra secuencia de datos provenientes del transmisor.
El tiempo máximo de espera en la recepción de un byte en una estructura de información se ajustó a 100 ms, y se hizo tanto al transmisor como al receptor ya que es necesario que estuvieran sincronizados. Esta temporización se fija en el programa del transmisor a través de la función de retardo delay empleada en C/C++, cuya sintaxis es la siguiente:
Delay (número);
El número interno que se coloca debe ser entero, para obtener el retardo se multiplica por 1 ~ 1 0 . ~ ms. Por lo que el valor de número para el tiempo ajustado es 100.
En el caso del receptor, esta temporización la realiza el microcontrolador a través del uso del Timer 1 como temporizador de 16 bits, la configuración del Timer 1 se realiza con el registro TlCON. Para nuestro caso, este registro se cargó con el valor:
TlCON =F5H = 11110101
Con este valor se tiene un rango del divisor de fiecuencia = 8
La temporización deseada se obtiene a partir de:
Temporización = 4 . Tosc. (65536 - NI,). Rango del divisor de fiecuencia
El periodo de oscilación es el inverso de la frecuencia de oscilación:
= 50 x 10-9 s = 50 ns 1 1
Fosc 20MHz TOSC = __ =
Despejando tenemos que:
1 Temporizacibn 4. Tosc Rango del divisor de frecuencia
N , , = 65536 -
Realizando operaciones obtenemos:
N,, = 62500
(65536 -NI,)= (65536- 62500) = 3036 = OBDCH
Por lo tanto los valores que se cargarán en el Timer 1 de 16 bits para lograr un retardo de 1 O0 mseg son:
TMRlH = OBH TMRlL = DCH
4-12

El tiempo máximo cumplido de recepción de un byte evita que el sistema esté esperando durante un tiempo indefinido una secuencia incompleta de información.
Recuperación de la información ante cortes de energía eléctrica. En caso de cortes de energia por medio de la lectura y escritura en la EEPROM de datos del microcontrolador se puede recuperar la información de control anterior a la falla eléctrica. En nuestro caso en determinadas aplicaciones puede resultar necesario que el sistema regrese al punto de intensidad luminosa que presentaba antes de un corte de energía eléctrica. Para ello después de la recepción correcta de una secuencia de información se almacena el valor de DATO en la memoria EEPROM de datos del microcontrolador.
Valor actual de intensidad luminosa + Almanenamiento en Dirección 02H de la Memoria EEPROM de datos
Para recuperar el dato, una vez que se energiza el sistema se ejecuta automáticamente el programa de control interno del microcontrolador donde se verifica el contenido de esta dirección. El valor escrito en esta dirección de la memoria corresponde al valor anterior de intensidad luminosa. Si existe un valor escrito se traslada a la salida para colocar a la lámpara en el punto o modo de operación que tenía antes de que se presentara la falla de electricidad.
Cambios graduales en los niveles de iluminación. Esto se realizó para el balastro para lámparas fluorescentes. Del lado del receptor, se agregó en el software la característica de incremento y decremento en el valor de la intensidad luminosa de forma gradual una vez que, a partir de un valor, se elige otro distinto. El ojo humano puede percibir entonces el incremento o decremento suave y lento de la iluminación.
Para ello es necesario programar un retardo para cada valor. El retardo por cada unidad decimal se ajustó a 20 mseg, de tal manera que para un salto de un 10% a un 100% en la intensidad luminosa de la lámpara existe un salto de 26 a 255 decimal, por lo que la duración de tiempo total en que se lleva a cabo este cambio se puede calcular de la siguiente forma:
Tiempo de espera = [(255 x Porcentaje mayor)- (255 x Porcentaje menor)]^ Retardo
Tiempo deespera máximo= [(255~100%)-(255xlO%)]x ( ~ O X ~ O - ~ )
Tiempo de espera máximo = [(255x 1)- (255 x O.l)]x (20x lo-’)
Tiempodeesperamáxirno=(255-26)~(2OxlO-~) = 4.58seg
Lo que representa el tiempo suficiente para no alterar de forma brusca la sensibilidad relativa del ojo ante un cambio en la iluminación de la lámpara fluorescente.
4-13
Capitulo 4 Desarrollo del software
La temporización de 20 ms solo es necesario programarla en el receptor, ya que es en este donde se almacena el valor anterior de intensidad luminosa. Para obtener la temponzación de 20 ms, se utilizó el Timer 1 de 16 bits, obteniéndose:
(65536 - N,,,) = (65536 -12500) = 53036 = CF2CH
Así finalmente los dos registros del Timer 1 para obtener una temponzación de 20 ms tienen los siguientes valores:
TMRlH = CFH TMRlL = 2CH
Prevención de bloqueo del sistema: Mediante el uso del perro guardián (WDT) del microcontrolador se evita que el sistema caiga en un ciclo infinito de la misma operación. Sin embargo, el punto más importante en el esclavo del sistema es la espera de la recepción del mensaje de información, el cual puede darse en un instante después a energizar como también puede darse horas o días después de acuerdo a la decisión del usuario, es por ello que se ‘refresca’ o se borra continuamente el contador interno del WDT para que no se active el perro guardián al caer en el bucle infinito de espera de recepción.
1v.4. DESCRIPCI~N DEL SOFTWARE EN EL TRANSMISOR
El software se desarrolló en C++, principalmente porque el resultado final es un producto con una alta integración al ambiente DOS y Windows lo cual le da facilidad de uso a través de una interfaz gráfica con manipulación desde el teclado de la computadora y un aprendizaje rápido por parte del usuario final. Además es destacable la popularidad que tiene este lenguaje de programación en los usuarios de PC’s.
El programa de control del transmisor contiene completamente al protocolo de comunicación desarrollado. Las funciones que realiza el amo por medio de la computadora para la transmisión de información son las siguientes:
Presentación del sistema y solicitud de la clave del usuario para tener derecho a manipular el sistema.
Configuración del puerto sene de la computadora para transmisión de datos. Los parámetros se ajustaron a una velocidad de transmisión de 9600 baudios, de 8 bits, sin paridad y con un solo un bit de paro.
Direccionamiento de las lámparas (Renglón, Columna). Este se realiza activando por medio del teclado de la computadora las filas y columnas en las que se encuentran las lámparas que se desean usar. Como resultado del direccionamiento se generan los valores de los registros de comando Renglón y Columna.
4-14
Capitulo 4 Desarrollo del software
Selección del balastro. Elección del tipo de balastro a utilizar: el fluorescente o el de HE). En el balastro fluorescente las operaciones posibles pueden ser:
Encendido Apagado Control de intensidad luminosa (10-100%)
Para el balastro de HID son:
Encendido Apagado Selección de la opción o modo de operación (00, 01-10, 11)
Cálculo de los dos bytes redundantes del algoritmo de detección de errores CRC-16. Se aplica el algoritmo y como resultado se generan los dos bytes redundantes: el Byte mas significativo del CRC-16 = MSB-CRC y el Byte menos significativo = LSB-CRC.
Una vez que se tienen los 5 bytes de información de la secuencia de datos, estos se transmiten hacía el receptor.
1. Renglón 2. Columna 3. Dato 4. MSB-CRC 5. LSB-CRC
Finalmente el sistema ofrece opciones para retransmitir mensaje, introducir datos nuevos o salir del programa.
Como resultado se tiene un sistema que no requiere capacitación para su manejo, siendo manipulable por cualquier persona, guiándola paso a paso durante toda la ejecución del programa.
1v.5. DESCRIPCI~N DEL SOFTWARE EN EL RECEPTOR
Se escribieron dos programas en ensamblador de acuerdo a las características de los esclavos: para el balastro fluorescente con control de intensidad luminosa y para el balastro de HID respectivamente. Las funciones que realizan los esclavos son las siguientes:
Configuración de los pines de entrada, salida y de control del microcontrolador. Por medio de los registros de control TRIS.
Configuración de los registros internos del microcontrolador para control del USART, interrupciones y temporizaciones.
4-15
Capitulo 4 Desarrollo del software
Activar el tiempo máximo de espera de recepción de un byte de datos en una secuencia de recepción ya iniciada en el protocolo de comunicación.
Recepción de los 5 bytes de información provenientes del transmisor (1. Renglón, 2. Columna, 3. Dato, 4. MSB-CRC, 5. LSB-CRC).
Cálculo de los bytes redundantes del CRC y detección de errores en la transmisión.
Comprobación de direccionamiento correcto de la lámpara (Renglón, Columna)
Verificación de operación deseada en el balastro: Para el Fluorescente (Encendido, apagado, control de intensidad luminosa) Y para el de vapor de sodio (Encendido, apagado, selección de la opción o modo de operación)
Si se elige encendido o apagado se aplica el nivel lógico correspondiente al relevador LR38595.
Si la elección ha sido control del nivel de iluminación del balastro fluorescente, es necesaria la transmisión de datos hacia el DAC serie, para ello se activa la subrutina de generación de las señales de control para el DAC.
Con esto también se ejecutará a la vez el efecto rampa en la intensidad luminosa.
Si la elección ha sido el cambio de modos de operación del balastro de HID, se requiere la transmisión de datos hacía los optoacopladores 4N25 para el balastro de HID, para lo cual se activa la subrutina de salida de datos a los pines de conexión donde se encuentran conectados los optoacopladores.
Almacenamiento del último valor de intensidad luminosa en la memoria EEPROM de datos para recuperarlo en caso de cortes de energía eléctrica.
Finalmente el sistema debe quedar listo para la recepción de una siguiente secuencia de bytes de información.
El proceso que sigue el software del receptor para el balastro fluorescente y el balastro de HID se muestra en los diagrama de flujo de las figura 4.4-4.6.
4-16
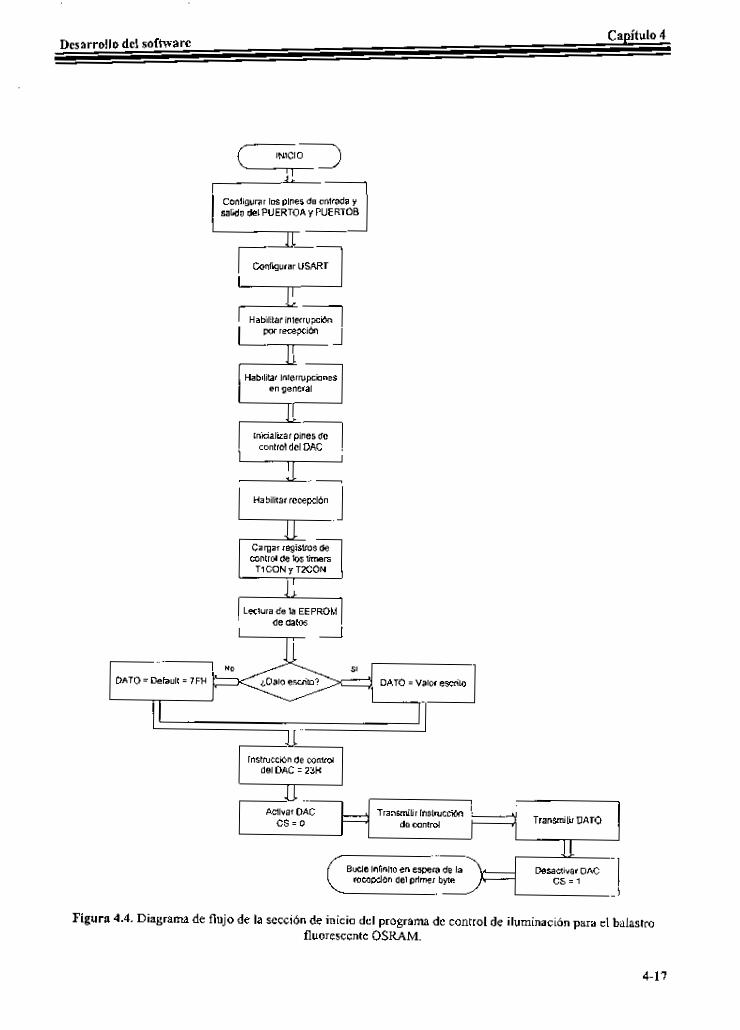
Capítulo 4 Desarrollo del software
I ~ ~ n f i g u m i los pines de entrada Y salida del PUERTOA y PUERTO6
Configurar USART
Habilitar interrupci6n
Habilitar interrupciones en general
Inicializar pines de control del DAC
Habilitar recepción u conirni deios timers
TICON y TZCON
11 Lectura de la EEPROM
de dalos
DATO = Default = 7FH DATO = Valor escrito
I I I I
Transmitir DATO Activar DAC Transmitir Instruccibn
cc.0 de mntrol
Desactivar DAC CS.1
Bucle Infinito en espera de la recepel6n del pnmer byte
Figura 4.4. Diagrama de flujo de la sección de inicio del programa de control de iluminación para el balastro fluorescente OSRAM.
4-17
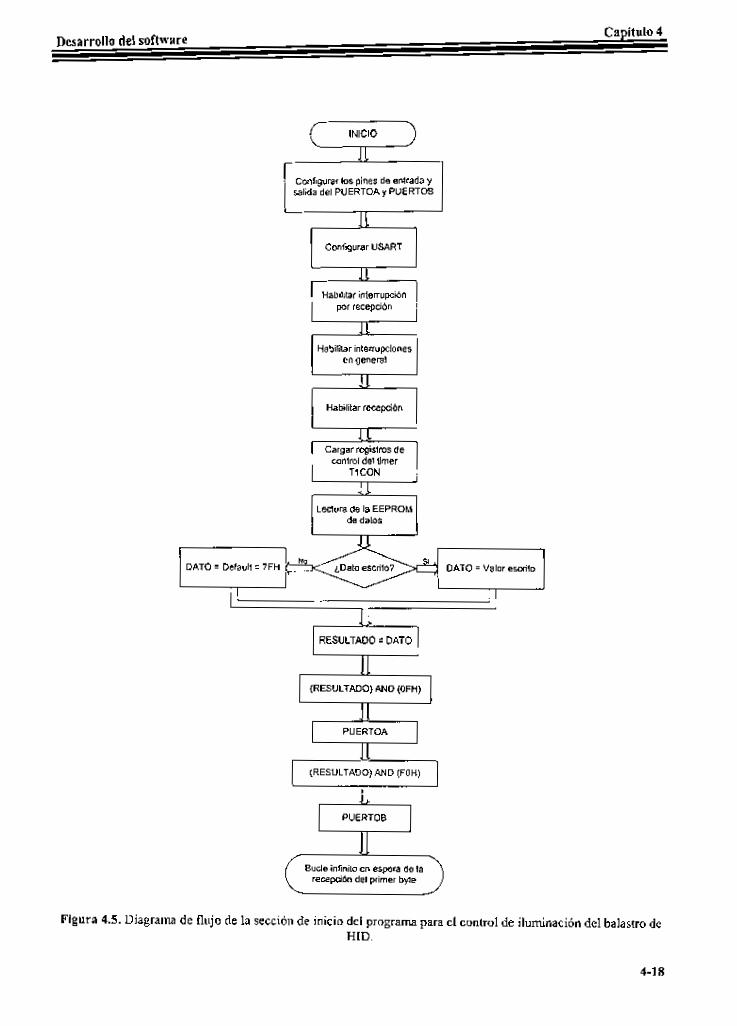
Capítulo 4 Desarrollo del software
INICIO s ' ConígLrar 10s p nes oc entraoa y I sa oa ae. P-ERTOA y PUERTOB
m ConBgurar USART
Habilitar interrupcibn por recepcibn
Habilitar interrupciones en general
Habilitar recepci6n
L1 Cargar registros de
control del timer TICON
v Lectura de la EEPROM
de datos
DATO = Default = 7FH DATO = Velar escrito
I 11
RESULTADO = DATO
I I
(RESULTADO) AND (OFH) ca PUERTOA
(RESULTAD0)AND (FOH)
PUERTOB G P Bucle infinito en espera de la
recepci6n del primer byie
Figura 4.5. Diagrama de íiujo de la sección de inicio del programa para el control de iluminación del balastro de HID.
4-18
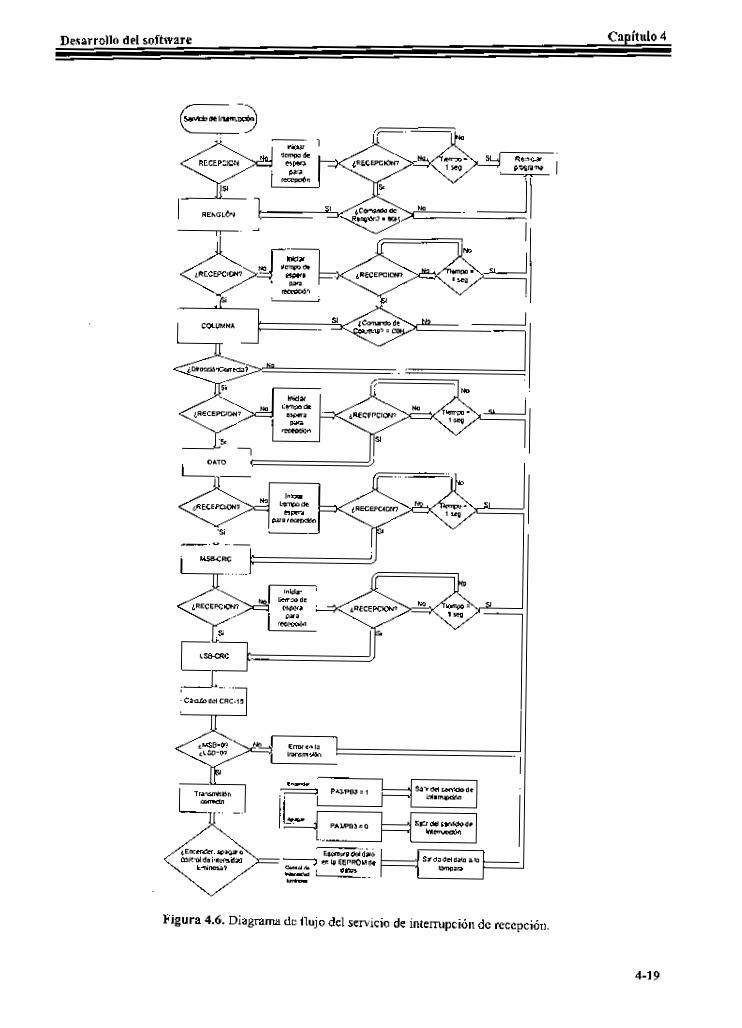
Capítulo 4 Desarrollo del software
mi l l
Figura 4.6. Diagrama de flujo del servicio de interrupción de recepción.
4-19
CAPÍTULO 5
Pruebas y resultados
V.1. PRUEBAS DE OPERACIÓN REALIZADAS AL SISTEMA
Una vez que se definió el hardware y sofivvare requerido para el control de la iluminación, se procedió a realizar las pruebas de operación del sistema de control completo.
Como se había mencionado anteriormente, debido a que Únicamente se cuenta con una tarjeta receptora solo es posible conectar una tarjeta de control e interfaz para un balastro, por lo que no se pueden direccionar los dos balastros a la vez. Así pues, se tiene que conectar el balastro que se desea manipular a la tarjeta receptora, y después, cuando se quiera controlar al otro balastro, se deberá cambiar la conexión de la tarjeta receptora a este balastro.
En el programa del transmisor se selecciona el balastro que se desea manipular, ya sea el balastro fluorescente OSRAM o el balastro de HID. Las operaciones que son permitidas y posibles para cada balastro son diferentes entre sí.
Por el diseño de las tarjetas de control e interfaz no es posible manipular al balastro fluorescente con datos de control para el balastro de HID, y viceversa, no se puede controlar al balastro de HID con datos de control para el balastro fluorescente, ya que los pines de control para activar la salida al balastro de cada una de las tarjetas son distintos.
V.l . l . Verificación del protocolo de comunicación
Los programas de control para los dos balastros obedecen al mismo protocolo de comunicaciones. Primero se verificó la robustez de las características del protocolo de comunicación. En caso de no direccionar al balastro correctamente de acuerdo a la dirección que le fue programada en la coordenada que ocupa en la matriz (Renglón 1, Columna 1), no se ejerce ninguna acción de control sobre éste, ya que al verificar direccionamiento incorrecto, en
5-1
Capítulo 5 Pruebas y resultados
el balastro se finaliza la ejecución del programa y se prepara para la recepción de un nuevo mensaje.
Detección de errores Mediante el algoritmo empleado para la detección de errores (CRC) con un polinomio de 16 bits se añadió mayor robustez al intercambio de información. Comprobar la eficacia del método de detección de errores resulta relativamente fácil, esto se realiza mediante la alteración del cálculo de los bytes redundantes en uno de íos pasos de la subrutina del programa. Este movimiento en el programa es suficiente para generar errores en el bloque de datos a transmitir. De manera que estos bytes redundantes incorrectos o corrompidos se añaden al mensaje a transmitir, simulando así el efecto de una posible interferencia al mensaje. Del lado del receptor no se altera el cálculo de los bytes redundantes, cuando se reciba el bloque de información y se lleve a cabo el cálculo de los bytes redundantes se presentará un resultado distinto del esperado, señalando errores en la transmisión. Una vez que se comge el algoritmo a la manera apropiada, los datos se reciben de manera correcta comprobando la eficacia del método para la detección de errores.
Detección de tiempo límite Con la característica del tiempo límite de espera de un byte se agregó más confiabilidad al sistema, así solo los mensajes que cumplen con ese tiempo de espaciamiento entre bytes se aceptan para controlar el sistema de control de la iluminación. Para verificar el tiempo máximo de recepción se modificó el retardo entre cada bit transmitido y al cumplirse el tiempo de espera de un byte el sistema finalizaba la recepción del mensaje en espera y se reiniciaba el programa en espera de una nueva secuencia de información. Aún cuando el contenido del mensaje sea el correcto si supera el tiempo de espera no respeta el protocolo de comunicación y es interpretado por el sistema como un mensaje erróneo.
Respuesta a fallas de energía A su vez se llevó a cabo la prueba de almacenamiento de información en la memoria EEPROM de datos del microcontrolador ante cortes de la energía eléctrica. De esta manera se comprobó que una vez que se ejecuta la acción deseada en el balastro, se almacena el valor del dato en la memona EEPROM de datos del microcontrolador para recuperar la información en caso de un corte de energía eléctrica. Cuando se produce la falla de energía eléctrica el sistema deja de funcionar, pero al volver a energizarse vuelve al punto de operación anterior.
V.1.2. Control de operación por FW del balastro fluorescente OSRAM
Haciendo uso de la tarjeta diseñada para el control e interfaz del balastro OSRAM se realizaron estas pruebas de operación. Mediante un voltaje de control analógico de 1 a 10 Volts se manipula la intensidad luminosa de la lámpara.
La tarjeta de control incorpora al DAC serie, el cual acondiciona los datos digitales provenientes del microcontrolador a una señal analógica de 1 a 10 Volts, io que nos permite variar la intensidad luminosa en la lámpara del I O al 100%. Logrando tener una resolución del 1% en el control de la iluminación.
5-2

Capitulo 5 Pruebas y resultados
Se enviaron datos al receptor usando el programa escrito en lenguaje C++ en la PC. Como resultado se logró el encendido, el apagado y el control de la intensidad luminosa del balastro del 10 ai 100%. Cabe hacer notar que estas pruebas se realizaron dentro de un edificio, donde el transmisor se localizaba en un segundo piso mientras el receptor se encontraba en un primer piso, sin existir línea de vista entre ellos.
En la figura 5.1 se muestra el esquema de conexión de estas pruebas - n M _
Pin'eni * I I I 1 ) ) ) ) ) )))) Llb~UlO
T,.nirn*d" 1.1.4
Comp"<.dor. r l _ I j - / P.noni, " " 7 X
Figura 5.1. Esquema de las pruebas realizadas al balastro fluorescente con control de la intensidad luminosa.
También se verificó la ejecución del efecto rampa. Cuando la acción de control deseada corresponde a un cambio en el nivel de la iluminación de la lámpara fluorescente se ejecutan las subrutinas para lograr el efecto rampa en el control de intensidad luminosa de la lámpara. El retardo para lograr el efecto fue suficiente para visualizar de manera eficaz el incremento o decremento gradual en la iluminación de la lámpara.
V.1.3. Control de operación por RF del balastro de HID
En estas pruebas de operación se empleó la tarjeta de control e interfaz construida para la operación de este balastro. En la tarjeta se incorporaron los circuitos integrados 4N25 para la selección del modo de funcionamiento del balastro, los cuales se activan a través de las terminales PB6 y PB7 del microcontrolador. Mientras que la terminal RB3 se utilizó para generar el pulso de activación del relevador para obtener el encendido y apagado de la lámpara.
En la figura 5.2 se muestra el esquema de conexión de estas pruebas.
m1.n.
Y I
Figura 5.2. Esquema de la etapa I de pruebas realizadas con el balastro de vapor de sodio de 1 IID.
5-3
Capítulo 5 Pruebas y resultados
Se usó el programa elaborado en lenguaje C++ en la computadora PC para enviar datos al receptor, Como resultado se logró seleccionar las tres opciones posibles de intensidad luminosa de la lámpara de vapor de sodio (00, 01-10, 11).
Así mismo se obtuvo una respuesta correcta del sistema en el control en el encendido y apagado de la lámpara. Por otro lado, la respuesta del sistema ante cortes de energía eléctrica fue la de recuperar la información, volviendo a la condición o modo de operación que presentaba antes de que ocurriera la falla en la energía eléctrica.
Esta prueba se realizó dentro de un edificio, donde el transmisor se ubicó en un segundo piso mientras el receptor se encontraba en un primer piso, sin existir línea de vista entre ellos.
V.1.4. Alcance de transmisión del sistema
El kit MDEV-916-ES permite determinar el alcance máximo de la comunicación entre las dos tarjetas. En la tarjeta transmisora se encuentra un circuito codificador que genera una transmisión simple de información. Existen dos botones de selección, la presión del primero provocará el sonido de una bocina y el segundo botón accionará un relevador en la tarjeta receptora. Por lo que presionando estos botones por intervalos de tiempo determinados a medida que se alejan el transmisor y el receptor se determina el alcance del kit en exteriores e interiores.
Los alcances nominales máximos del kit proporcionados por el fabricante, Linx Technologies, bajo condiciones especiales de prueba, son los siguientes:
En exteriores: 300.8 m En interiores: 150.4 m
Sin embargo, el alcance de la transmisión en extenores e interiores vana de acuerdo a las circunstancias propias del área en la que se encuentra el sistema de comunicación. Los obstáculos entre la línea de vista del transmisor y el receptor, la temperatura ambiente, la presión atmosférica, la humedad y el viento en contra son factores que disminuyen el alcance de comunicación. Por ello es necesario realizar las pruebas en un ambiente normalizado, en el cual se conozcan los valores de1 terreno y del clima en donde se encuentra el sistema de comunicación. Y así registrar que bajo esas condiciones ambientales se realizaron las mediciones del alcance máximo de la comunicación. Las siguientes fueron las pruebas realizadas bajo condiciones conocidas:
Día: 5 de Agosto de 2003 Hora: 12:OO Lugar: Lázaro Cárdenas Michoacán Ubicación: A nivel del mar con línea de vista sin obstáculos
5-4
Capítulo 5 Pruebas y resultados
Las condiciones meteorológicas correspondientes fueron:
Presión barométnca=PBnr= 1013x10” Bares= 999.75 xlO-’Atm Temperatura ambiente = T = 33.9 “C Humedad relativa = h = 57% Viento = del norte 10 !unh *
Obteniendo las siguientes mediciones:
Alcance del kit = 300 m Alcance del sistema = 137.65 m
Se realizó una segunda etapa de mediciones del alcance del sistema por la noche de ese mismo día, tal como lo muestran las condiciones iniciales de prueba siguientes:
Dia: 5 de Agosto de 2003 Hora: 22:OO Lugar: Lázaro Cárdenas Michoacán Ubicación: A nivel del mar con línea de vista sin obstáculos
Los valores meteorológicos para este tiempo fueron:
Presión barométnca = P B ~ ~ = 1012.4~10” Bares = 999.1578~10” Ami Temperatura ambiente = T = 28.2 “C Humedad relativa = h = 63% Viento = del norte 1.8 km/hr *
Las mediciones del alcance del sistema fueron:
Alcance del kit = 300 m Alcance del sistema = 140.75 m
* Datos proporcionados por la Capitanía de Puerto de la Ciudad de Lázaro Cárdenas Michoacán
Aquí se puede observar una clara disminución del alcance de transmisión del sistema comparado con el alcance del kit de comunicación.
La causa de esto es la presencia de un protocolo de comunicación robusto en el sistema desarrollado que no permite enores en la transmisión. El funcionamiento de la etapa de comprobación de alcance del kit se basa en el codificador HT680 que se encuentra en la tarjeta de transmisión, y en el decodificador HT694 que se encuentra en la tarjeta receptora.
El codificador envía tres veces el mismo dato hacía el receptor, del otro lado el decodificador comprueba que 2 de los 3 datos recibidos sean iguales, para asegurar que la transmisión del
5-5
Capitulo 5 Pruebas y resultados
mensaje no ha sido corrompida. Por lo que, todo un byte puede ser erróneo y aún así, señalar que la transmisión fue ‘correcta’.
En contraste, por el protocolo de comunicaciones para el sistema de control desarrollado se envían 5 bytes para cada secuencia o bloque de información, los cuales no deben presentar errores en el contenido de ninguno de sus bits, si se corrompe alguno la transmisión será detectada como incorrecta provocando que el sistema no ejerza ninguna acción de control y deseche lo que recibió.
De manera que es la robustez del protocolo de comunicación lo que provoca el menor alcance del sistema comparado al kit de comunicación.
v.2. COMPARACI~N DEL SISTEMA DESARROLLADO CON OTROS EQUIVALENTES
En el capítulo 1 se habló de los sistemas comerciales que existen actualmente para el control de la iluminación de los cuales se resaltaron a MultiDim y LumiSense de Philips. Además se habló de tecnologías hechas para el mismo fin entre las cuales sobresalen X10, RadioLink, Hometronic y Lutron.
Sin embargo, todos los sistemas antenores tienen la característica de seguir incorporando portadora por línea de potencia al sistema para el control de la iluminación o una instalación de cableado de red especial y lo combinan con una comunicación inalámbrica.
De los sistemas antenores, se pueden mencionar algunos datos relevantes en la operación de algunos de ellos. MultiDim, LumiSense y Lutron están diseñados exclusivamente para el control de la iluminación, las otras tecnologías añaden control de aparatos y dispositivos domésticos.
Hometronic utiliza un estándar de conexión inalámbrica de aparatos domésticos conocido como Bluetooth, además estos pueden controlarse a través de Internet. Lutron exclusivamente se enfoca al control de intensidad luminosa a través de las condiciones del área en las que se encuentran las lámparas, pero es un sistema de control muy sencillo al manejarse desde un control remoto manual de usuario direccionando exclusivamente a una de las lámparas o a todas en conjunto por medio de Dimmers que sustituyen a los interruptores.
Mención aparte merece RadioLink, ya que este utiliza la técnica de transmisión por RF de espectro disperso para el control de los dispositivos y equipos que se encuentran en el interior. Manejando la banda de transmisión de 902-928MHz en 25 canales para evitar interferencias podiendo direccionar hasta 3600 dispositivos.
Por las características anteriores, Únicamente los sistemas comerciales que se pueden comparar en sus caractensticas de operación y prestaciones al sistema desarrollado son: MultiDim, LumiSense Y RadioLink.
5-6
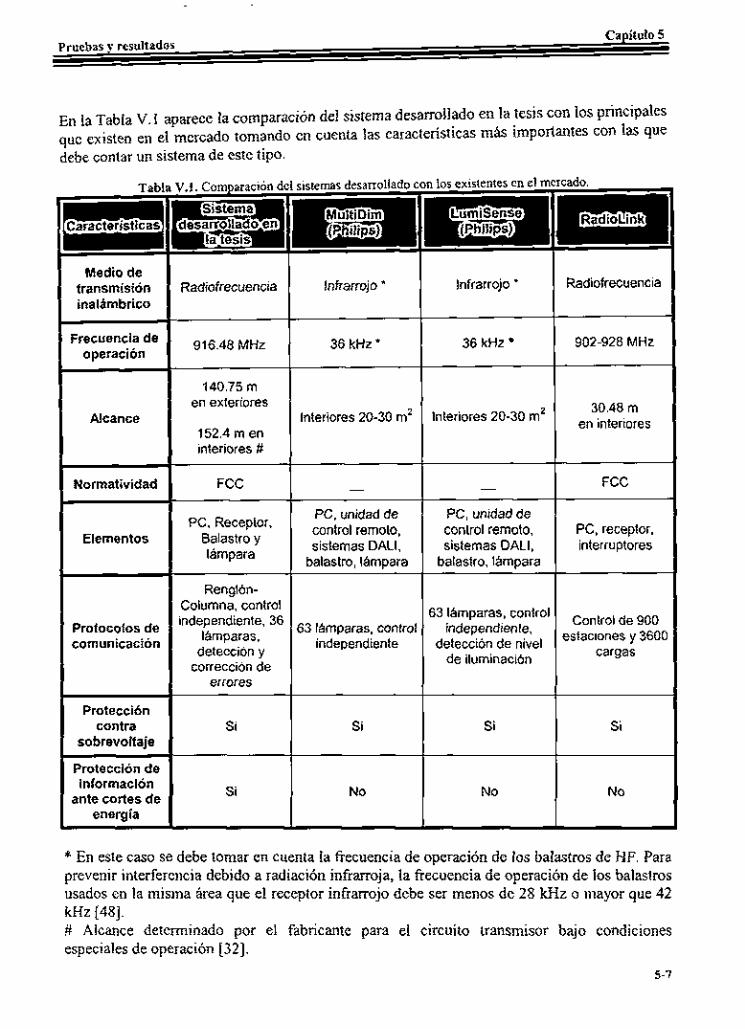
Capítulo 5 Pruebas y resultados
~~~~~~~
En la Tabla V. 1 aparece la comparación del sistema desarrollado en l a tesis con los principales que existen en el mercado tomando en cuenta las características más importantes con las que debe contar un sistema de este tipo.
Infrarrojo * Medio de
transmisión inalámbrico
Infrarrojo * Radiofrecuencia
~
Frecuencia de operación 916.48 MHz
140.75 m
Alcance
36 kHz * 36 kHz 902-928 MHz
Normatividad
63 lámparas, control
detección de nivel de iluminación
independiente
~
Elementos
Control de 900
cargas y 36oc
Protocolos de comunicación
Protección contra
sobrevoltaje
Protección de información
ante cortes de energía
Radiofrecuencia
en exteriores
152.4 m en Interiores 20-30 m2 30.48 rn Interiores 20-30 mz en interiores
interiores # I
FCC
PC, Receptor, Balastro y lámpara
Renglón- Columna, control independiente, 36
lámparas, detección y
corrección de errores
- PC, unidad de control remoto, sistemas DALI,
balastro, lámpara
63 lámparas, control indeDendiente
PC, unidad de control remoto, PC, receptor, sistemas DALI, interruptores
balastro, lámpara
si I si si 1 si I I I I
I No No
si I No I * En este caso se debe tomar en cuenta la ffecuencia de operación de los balastros de HF. Para prevenir interferencia debido a radiación infrarroja, l a frecuencia de operación de los balastros usados en la misma área que el receptor infrarrojo debe ser menos de 28 kHz o mayor que 42 kHz [48]. # Alcance determinado por el fabricante para el circuito transmisor bajo condiciones especiales de operación [32].
5-1
Capítulo 5 Pruebas y resultados
La comparación del sistema de control de iluminación desarrollado en este trabajo de investigación con los sistemas comerciales genera los siguientes comentarios:
No existe un sistema entre los desarrollados por los fabricantes de equipo de iluminación que utilice únicamente comunicación inalámbrica por radio frecuencia para el control de la intensidad luminosa de balastros electrónicos. Se usa comúnmente el control por infrarrojo debido principalmente a que son más económicos dichos controles. Y los que utilizan RF siguen empleando las líneas de energía eléctrica o alguna red especial para interconectar todas las lámparas.
La frecuencia de transmisión del sistema de 916.48 MHz no provocará interferencia al balastro electrónico. Algo que si se presenta con los sistemas que utilizan infrarrojo, al operar en frecuencias de operación similares a las frecuencias de conmutación de balastros electrónicos, con lo que se produce interferencia.
El sistema cumple de manera completa con las normas de transmisión para equipos con aplicación ICM de la Comisión Federal de Comunicaciones FCC de los Estados Unidos de América. Y es respaldado por el reglamento de Telecomunicaciones de México para la transmisión en el país. En contraste, los sistemas que utilizan infrarrojo no requieren cumplir con normas para obtener licencias para su empleo, ya que dichas normas apenas se e s t h desarrollando. Las normas que rigen a la comunicación infrarroja están actualmente bajo el diseño de la Infrured Data Association (IrDA) [49][50].
Respecto al alcance de transmisión cabe señalar que el alcance del sistema es mucho mayor que el de los sistemas comerciales. Además dado que la antena utilizada por el sistema es de tipo radial, el área de alcance corresponde a 62236.86 m2.
El sistema contiene características de confiabilidad y robustez que logran tener un mejor protocolo de comunicación comparado con los sistemas comerciales, ya que cuenta con detección y corrección de errores, protección de información ante cortes de energía. Además de incremento y decremento gradual en la intensidad luminosa.
5-8

CAP~TULO 6
Conclusiones y trabajos futuros
VI.l. CONCLUSIONES GENERALES
A partir de los resultados obtenidos en el presente trabajo se concluye que la comunicación inalámbrica por RF es viable de utilizarse en sistemas de control de la iluminación.
En este trabajo de tesis se realizó un análisis de alternativas de comunicación inalámbrica para aplicaciones en sistemas de iluminación. Se desarrolló un sistema de control para transmitir datos mediante el uso de circuitos de RF a alta velocidad. El cual permite gobernar de forma remota, el encendido, el apagado y la intensidad luminosa de las lámparas. Las ventajas de transmitir con este tipo de dispositivos son claras: eliminar el uso de cables de control que además de ser desagradables a la vista, implican un costo de instalación y mantenimiento alto; y eliminar conexiones que con el tiempo tienden a ocasionar problemas, para ello fue necesario cubrir los siguientes aspectos:
Estudio de la normatividad relacionada con la utilización de frecuencias y circuitos de transmisión de radiofiecuencia Desarrollo de una interfase para el balastro Estudio de estrategias de mando Análisis protocolos de comunicación inalámbrica
Con el desarrollo del sistema se tiene un estudio concluido de algunas alternativas de comunicación inalámbnca para aplicación en sistemas de iluminación. En principio es aplicable a sistemas de iluminación en edificios. Sin embargo quedaría como opcional la aplicación en distancias mayores, para lo que se necesita una valoración posterior del circuito y de la potencia de transmisión. Las características principales del sistema de transmisión son:
Opera en la banda para equipos con aplicación ICM de la FCC a la fiecuencia de 916.48 MHz, la cual algunos fabricantes han propuesto para equipos con aplicación ICM de alcance corto.
6-1

Conclusiones y trabajos futuros Capítulo 6
Por ser una aplicación ICM no necesita ningún permiso especial para transmitir en una aplicación comercial. La potencia de transmisón de salida es de 1 mW El alcance del sistema es de 140.75 metros con línea de vista sin obstáculos Velocidad de transmisión de 56 kbps.
Normatividad. El sistema de control de iluminación, cumple con las normas de transmisión para equipos con aplicación ICM de la Comisión Federal de Comunicaciones FCC de los Estados Unidos de América.
En México los equipos con aplicación ICM deberán trabajar exactamente a 915 MHz o a 2450 MHz de acuerdo a la asignación de frecuencias del espectro radioeléctrico. Ahora bien, en los artículos 124 y 125 del Reglamento de Telecomunicaciones de México, respecto al Uso de Frecuencias Radioeléctricas en Equipos y Dispositivos, se hace mención que es posible no cumplir la frecuencia exacta estipulada para la operación de los equipos ICM mientras estos no interfieran entre sí o con equipos que utilizan espectro disperso. Si se desea comercializar el sistema en el país deberá solicitarse al fabricante la reproducción del transmisor a 915 MHz, o usar el sistema en lugares alejados de otras aplicaciones ICM.
Balastros. Se probaron dos tecnologías de balastros ya construidos:
Balastro OSRAM con control de intensidad luminosa para lámparas fluorescentes compactas con control de 1-10 Volts. Balastro diseñado y construido por el gnipo de iluminación del CENIDET para las lámparas de vapor de sodio, con dos niveles de intensidad.
Detección de errores. El sistema posee la capacidad de la detección y corrección de errores, para ello se eligió el polinomio CRC-16 = 8005H. Con este polinomio la probabilidad de error es de un bit por cada 100,000 transmitidos, lo que supera a la mayoría de los métodos conocidos para la detección de errores.
Protocolo de comunicación. El sistema cuenta con un protocolo de comunicación suficientemente bueno para la aplicación en edificios, con la capacidad de direccionamiento de:
Renglones de lámparas Columnas de lámparas Lámparas individuales Grupos de lámparas variables de 2, 3, 4, 5 , 6, 8, 9, 10, 12, 15, 16, 18, 20, 24, 25, 30 y 36 lámparas
El número máximo de lámparas direccionadas puede ampliarse según las necesidades del usuario, esto se logra haciendo uso de más registros para el direccionamiento. Se agregaron algunas características extras al protocolo de comunicación para hacerlo más robusto y confiable, estas son:
6-2
Conclusiones y trabajos futuros Capítulo 6
0
Tiempo límite máximo de espera de recepción en el protocolo. Recuperación de la información ante cortes de energía eléctrica. Cambios graduales en la intensidad luminosa. Esto se realizó para el balastro OSRAM
para lámparas fluorescentes. Prevención de bloqueo del sistema
El programa de transmisión contiene la programación completa del protocolo de comunicación, agregando la detección y corrección de errores. El sistema no requiere capacitación para su manejo, siendo manipulable por cualquier persona, guiándola paso a paso durante toda la ejecución del programa.
Interferencia. Cabe señalar que no se presentó problema respecto a interferencia de la etapa de potencia con la etapa de recepción y control. Debido a que la frecuencia de operación del balastro es demasiado pequeña comparada con la frecuencia de transmisión. El transmisor cumple con normatividad de emisión de espurias. Mientras que el receptor no emite datos. Por lo cual, para evitar posibles interferencias en un diseño comercial el balastro deberá cumplir con normas de compatibilidad electromagnética EMC. El sistema tiene mayor alcance y robustez si se transmiten directamente las ondas de radio sobre la antena del receptor con línea de vista.
Comparación del sistema. Se arrojaron los siguientes resultados:
No existe un sistema entre los desarrollados por los fabricantes de equipo de iluminación que utilice Únicamente comunicación inalámbrica por radiofrecuencia para el control de la intensidad luminosa de balastros electrónicos, el uso de infrarrojo es más generalizado por no tener que cumplir normatividad para poder transmitir y por ser más económico. Los sistemas comerciales que utilizan RF para la transmisión continúan combinando el control con la técnica de portadora por la línea eléctrica o con la conexión de redes alámbricas. En el caso del sistema desarrollado todos los esclavos contarán con su propio receptor, por lo que no se necesita conexión alámbrica en la red matricial de los balastros. En caso de que la aplicación requiera la conexión alámbrica de los balastros en red, solo será necesario un receptor para todos los balastros.
0 La frecuencia de transmisión del sistema de 916.48 MHz no provocará interferencia al balastro electrónico, ya que está muy por arriba de la frecuencia de conmutación de los intemptores del balastro. Para prevenir interferencia debido a radiación infrarroja los sistemas comerciales usan balastros con frecuencias de operación menores de 28 kHz o mayores que 42 kHz.
El sistema contiene un protocolo de comunicación mejor que el de los sistemas comerciales, contando con detección de errores, incremento y decremento gadual en la intensidad luminosa además de protección de la información ante cortes de energía, por lo que el sistema retorna al último nivel de iluminación antes de presentarse un corte en la energía eléctrica.
6-3
Capitulo h Conclusiones ! trabajo$ futuros
Por último cabe mencionar que las aplicaciones del sistema se pueden extender más allá de la iluminación hacía un control inalámbrico de audio/video, segundad, temperatura, persianas, etc.
V1.2. COMENTARIOS Y RECOMENDACIONES PARA TRABAJOS POSTERIORES
Para pasar a un diseño que pueda reproducirse, un estudio posterior deberá enfocarse al ahorro de espacio y costo del sistema:
Es importante hacer notar que el diseño puede construirse con un menor número de componentes. En primer lugar del lado del transmisor, se puede hacer usando solamente la parte del RS-232 del kit de evaluación eliminando las otras partes del kit hechas para otros fines, En segundo lugar del lado del receptor solo tendrá que agregársele el chip receptor sin necesidad de contar con los circuitos transceptores para la comunicación RS-232 eliminándolos de las taxjetas, esta medida economizara aún más el sistema. Cabe mencionar que el módulo USART se puede implementar por software por lo que se puede sustituir el microcontrolador de 18 pines por uno de menor tamaño, teniendo cuidado de elegir uno que contenga memoria de programa suficiente. La implementación en software de un módulo USART es algo que está bien definido. Microchip ofrece programas para microcontroladores PIC que no cuentan con un módulo USART para implementarlo por software [51]. La sustitución del microcontrolador de la gama media PIC16F628 por un microcontrolador de la gama enana (8 pines) provocará una reducción del espacio en la tarjeta, puntos de soldadura y del costo del sistema. Se recomienda usar el PIC12CE673 y PIC12CE674 por su capacidad de 1 y 2Kbytes respectivamente en su memoria de programa. Para una mejor protección de la integridad de la información se puede hacer uso de blindajes del circuito receptor. Si se desea aplicar el sistema a distancias mayores se necesita una valoración del circuito transmisor y de la potencia de transmisión. Cabe señalar que la potencia de salida del transmisor usado es de 1 mWatt, y de acuerdo a la norma FCC 18.305a se permite que los equipos ICM que trabajan en una de las frecuencias permitidas de transmisión de la FCC transmita potencia radiada ilimitada en la banda especificada para esa frecuencia. Al aumentar la potencia de igual manera se incrementará considerablemente el alcance del sistema. Algo importante a considerar en un estudio futuro es la evaluación de las antenas utilizadas, con el fin de optimizar la comunicación del sistema. Factores como el tipo, el tamaño, la posición, el costo y razones cosméticas deben ser tomados en cuenta en el análisis de la antena.
6-4
APÉNDICES
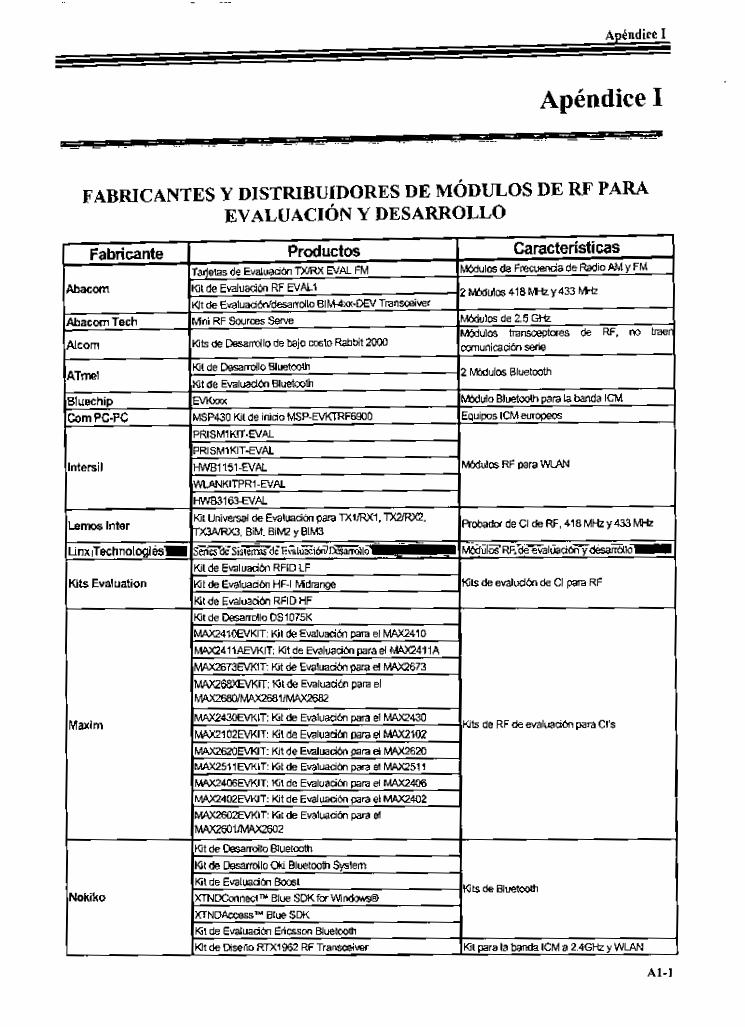
Apéndice I _- _---
FABRICANTES Y DISTRIBUIDORES DE MÓDULOS DE RF PAM EVALUACI~N Y DESARROLLO
2 MMulos Bluetwth
M6dulos RF para W
Kits de evaiuaón de CI para RF
ts de RF de evaluaaón para Cl's
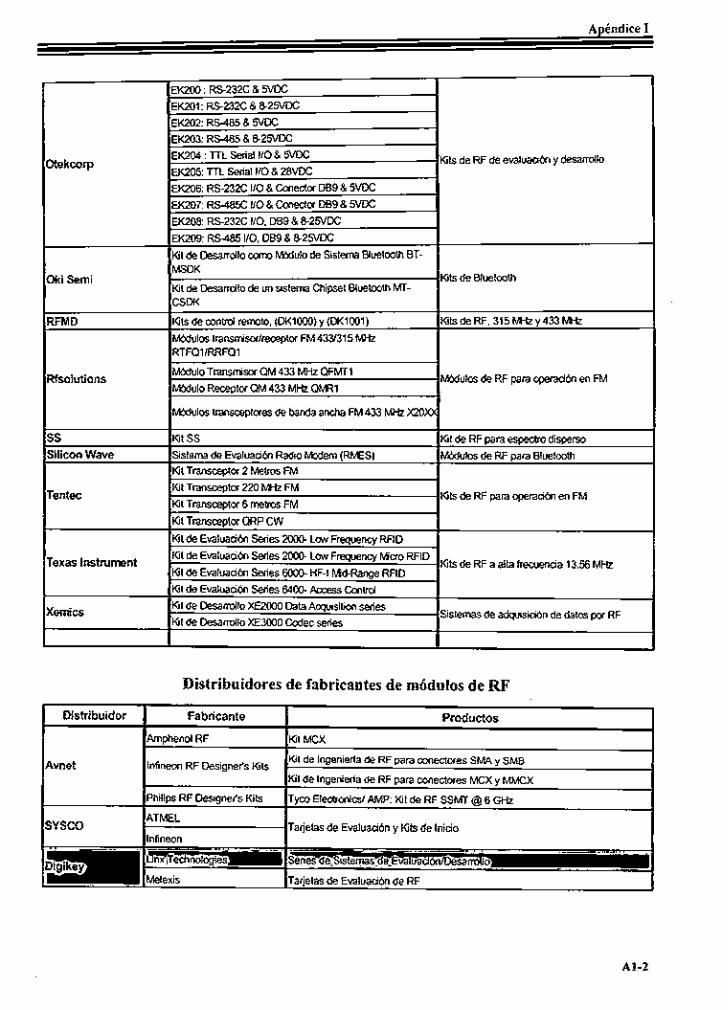
Apéndice I
Kits de RF de evaluación y desarrollo
Kits de Bluetooth
M u l o s de RF para operación en FM
Wulos transceptofes de banda ancha FM 433 M M x20
ss Silicon Wave
Tentec
Texas Instrument
Xemics
Kit ss Sistema de Evaluación Radio Modem (RMES)
Kit de RF para espectro disperso M u l o s de RF para Bluetmih
Kit Transoeptor 2 Metros FM Kit Transceptw 220 M M FM Kit Transoeptw 6 m e b FM Kit Transoeptw QRP CW
Kits de RF para operación en FM
Kit de Evaluación Series XCG Low Frequency RFlD Kit de Evaluación Series 20W Low Frequency Mia0 WID Kit de Evaluación Series MMO HF-I had-Range RFlD Kit de Evaluación Series 64W paess Contrd Kit de DesamlloX€2000 Data Aoquisiüon series Kit de DesamlloXE3000 Codecsenes
Kits de RF a alta h e n c i a 13.56 M M
Sistemas de adquisición de datos por RF
Distribuidor
Avnet
SYSCO _ _ I
Tar.etas de Eva "aaón ae RF
Fabricante Productos
hphenol RF Kit MCX
Infinem RF Designeh Kits
Philips RF Designeh Kits
ATMEL
I"fiW""
Kit de lngenieria de RF para mnectores SM4 y SMB
Kit de Ingenieria de RF para mnectores MCX y MMCX
Tym Electronid AMP Kit de RF SSMT @ 6 G M
Tajetas de Evaluación y Kits de Inicio
~
Al-2
Apéndice I1
CONFIGURACI~N DE LOS PARÁMETROS DE COMUNICACI~N ENTRE AMO Y ESCLAVO
El intercambio de datos de computadora a microcontrolador y de microcontrolador a los periféricos requiere de compatibilidad entre los diferentes niveles de hardware y software. para lo cual es necesario configurar los distintos módulos de interfaz: el puerto serial de la computadora y el USART del microcontrolador.
Configuración del puerto serie para transmisión. En los lenguajes de programación C y C++ se provee la función bioscom o biosserialcom que sirve para realizar operaciones de entradalsalida con el puerto serial [52].
En el sistema de control de iluminación se inicializa el puerto serial, con los parámetros que definidos en la constante [SETTINGS] de la siguiente manera:
#define SETTINGS CCOM-9600 I -COM - CHR8 I -COMNOPARiTY I COM-STOP1)
Los parámetros quedan definidos como:
Velocidad de transmisión = 9600 baudios Ancho de palabra = Dato de 8 bits Tipo d e Paridad = N o pm’dad Bits de paro = 1 bit
Para la transmisión de información hacía el la tarjeta transmisora básicamente se requieren 2 funciones utilizando el puerto sene, las cuales son las siguientes:
Configurar parámetros de comunicación. Se realiza por medio de la siguiente instrucción:
bioscom CCOM-INiT, SETTINGS, comgort);
Transmitir byte. Se lleva a cabo mediante:
bioscom ( -COM-SEND, DATO, comqort);
Configuración del módulo USART del microcontrolador. La interfaz RS-232 requiere configurar el USART del microcontrolador en el modo asíncrono. Los registros del microcontrolador para el control del USART son:
A2-1
Apéndice III
Apéndice 111
MODELO DE REFERENCIA DE INTERCONEXI~N DE SISTEMAS ABIERTOS (OSI)
Este modelo se basa en una propuesta que desarrolló la Organización internacional de Normas (ISO, por sus siglas en inglés) como primer paso hacia la estandarización internacional de los protocolos que se usan en las diversas capas. OS1 se refiere a la conexión de sistemas heterogéneos, es decir, a sistemas dispuestos a establecer comunicación con otros diferentes P51.
Los principios aplicados para el establecimiento de las siete capas fueron los siguientes:
1. Se creará una capa siempre que se necesite un nivel diferente de abstracción 2. Cada capa debe realizar una función bien definida 3. La función de cada capa se elegirá pensando en la definición de protocolos
estandarizados intemacionalmente 4. Los límites de las capas se elegirán de tal forma de minimizar el flujo de información a
través de las interfaces 5. La cantidad de capas debe ser suficientemente grande para no tener que agrupar
funciones distintas en la misma capa y lo bastante pequeña para que la arquitectura no se vuelva dificil de manejar
El modelo OSI, no es una arquitectura de red, dado que no especifica los servicios y protocolos que se utilizan en cada etapa; solo dice lo que deberá de hacer cada etapa. Sin embargo la IS0 ha elaborado normas para todas las capas, aunque estas no sean parte del modelo. En la figura A4.1 se muestra el esquema del modelo de referencia OSI. A continuación se describen cada una de las etapas del modelo OSI:
Capa física: Se ocupa de la transmisión de bits a lo largo de un canal de comunicación. Su diseño debe asegurar que cuando un extremo envía un bit con valor de 1, éste se reciba exactamente como un bit con ese valor en el otro extremo, y no como un bit con valor O. Los problemas de diseño a considerar aquí, son los aspectos mecánicos, eléctricos, de procedimiento de interfase y el medio de transmisión físico, que se encuentra bajo la capa fisica.
Capa de enlace: La tarea principal de esta capa consiste en transformar a un medio de transmisión común y comente en una línea sin errores de transmisión para la capa de red. Como la capa física básicamente acepta y transmite un flujo de bits sin tener en cuenta su significado o estructura, recae sobre la capa de enlace la creación o reconocimiento de los límites de la trama. Esto puede llevarse a cabo mediante la inclusión de un patrón de bits especial al inicio y al término de la trama. Si estos patrones de bits pueden aparecer entre los datos, deberá tenerse un cuidado especial para evitar cualquier confusión al respecto.
A3-1

Ankndice III
Capa de sesión: Permite que los usuarios de diferentes máquinas puedan establecer sesiones entre ellos. A través de una sesión se puede llevar a cabo un transporte de datos ordinario, tal y como lo hace la capa de transporte, pero mejorando los servicios que ésta proporciona y que se utilizan en algunas aplicaciones. Una sesión podría permitir al usuario acceder a un sistema de tiempo compartido a distancia, o transferir un archivo entre dos máquinas. Uno de los servicios de la capa de sesión consiste en gestionar el control del diálogo así como la administración del testigo y la sincronización.
Capa de presentación: Realiza ciertas funciones que se necesitan bastante a menudo como para buscar una solución general para ellas, más que dejar que cada uno de los usuarios resuelva los problemas. En particular y, a diferencia de las capas inferiores, que únicamente están interesadas en el movimiento fiable de bits de un lugar a otro, la capa de presentación se ocupa de los aspectos de sintaxis y semántica de la información que se transmite. La capa de presentación está relacionada también con otros aspectos de presentación de la información. Por ejemplo, la compresión de datos se puede utilizar aquí para reducir el número de bits que tienen que transmitirse, y el concepto de criptografia se requiere utilizar frecuentemente por razones de privacidad y de autentificación.
Capa de aplicación: Contiene una variedad de protocolos que se necesitan frecuentemente, con el fin de realizar una compatibilidad de programas de software para que trabaje en diferentes terminales. Una forma de resolver este problema consiste en definir una terminal virtual de red abstracto, con el que los editores y otros programas pueden ser escritos para trabajar con él. El software completo de terminal virtual se encuentra en la capa de aplicación. Otra función que realiza esta capa es la transferencia de archivos.
A3-3
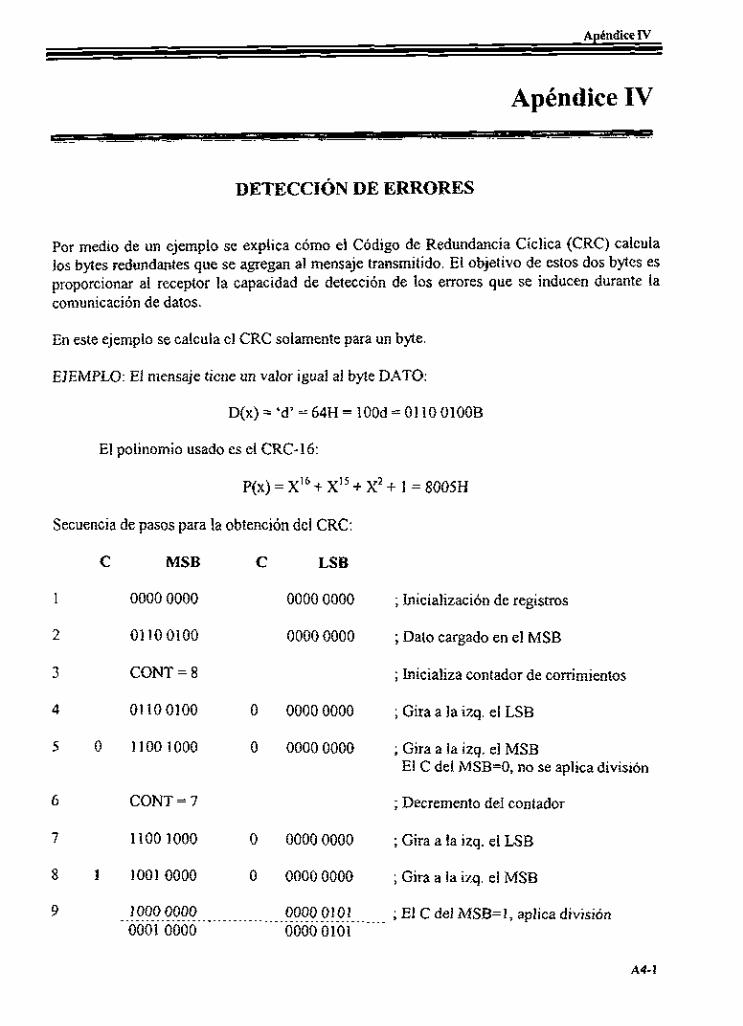
Anendice IV
Apéndice IV
DETECCI~N DE ERRORES
Por medio de un ejemplo se explica cómo el Código de Redundancia Cíclica (CRC) calcula los bytes redundantes que se agregan al mensaje transmitido. El objetivo de estos dos bytes es proporcionar al receptor la capacidad de detección de los errores que se inducen durante la comunicación de datos.
En este ejemplo se calcula el CRC solamente para un byte.
EJEMPLO: El mensaje tiene un valor igual al byte DATO:
D(x) = ‘d’ = 64H = lOOd = O110 OlOOB
El polinomio usado es el CRC-16:
P(x) = XI6 + XI5 + X 2 + 1 = 8005H
Secuencia de pasos para la obtención del CRC:
C
O
1
MSB
O000 O000
O110 O100
CONT = 8
O110 0100
1100 1000
CONT = 7
1100 1000
1001 O000
1 O00 O000 0001 O000 ............... .....
C
O
O
O
O
....
LSB
O000 O000
O000 O000
O000 O000
O000 O000
O000 O000
O000 O000
O000 0101 O000 O101 ..............
; inicialización de registros
; Dato cargado en el MSB
; Inicializa contador de corrimientos
; Gira a la izq. el LSB
; Gira a la izq. el MSB El C del MSB=O, no se aplica división
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB
; El C del MSB=I, aplica división
A4-1

10 CONT = 6
11 O001 O000 o O000 1010
12 o 0010 O000 o 00001010
13 CONT = 5
14 O010 O000 o O001 O100
15 O 01000000 o O001 O100
16 CONT = 4
17 o1 O0 O000 o O010 1000
18 o 10000000 o 00101000
19
20
21 I
22
23
24
25 1 26
21
28
29 1
CONT = 3
1000 O000 o 0101 O000
O000 O000 o O101 O000
1000 O000 O000 O101 1000 O000 O101 0101
....................................................
CONT = 2
1000 O000 o 10101010
O000 O000 o 10101010 1 O00 O000 O000 O101 1000 O000 1010 1111
................................................
CONT = 1
1000 O000 1 O101 1110
00000001 t 1 0101 1110 1000 O000 1000 O001
........................ O000 0101 O101 1011
................
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB El C del MSB=O, no se aplica división
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB El C del MSB=O, no se aplica división
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB El C del MSB=O, no se aplica división
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB
; El C del MSB=l, aplica división
; Decremento del contador
; Gira a la izq. el LSB
; Gira a la izq. el MSB ; El C del MSB=l, aplica división
; Decremento del contador
; Gira a la izq. el LSB.
; Gira a la izq. el MSB ; El C del MSB=l , aplica división
A4-2
Apéndice IV
30 CONT = O ; El contador = O, se tiene el CRC en MSB y LSB
Byte redundante más significativo = MSB Byte redundante menos significativo = LSB Acarreo = C
Obteniéndose al final:
MSB = 1000 0001 = 81H LSB = O101 1011 = 5BH
Por lo que la palabra codificada compuesta por el dato y los bytes redundantes es:
Q ( x ) = 0110 0100 1000 O001 O101 1011
A4-3
REFERENCIAS
Referencias
Referencias por orden de aparición
Comisión Federal de Electricidad, Clientes y volumen de ventas, [en línea] [Fecha de consulta: Agosto 20031 Disponible en: ~http://www.cfe.gob.mx/www2/queescfe/ notaqueescfe.asp?seccion=queescfe&seccion~~d=2273&secc~on~nombre=Cl~en te s+y+volumen+de+ventas>
De Buen, Odón; “Transición energética. Tarifas horarias para la mediana industria y el uso racional de la energía eléctrica”, [en línea] [Fecha de consulta: Agosto 20031 Disponible en: <http://www.funtener.org/pdfs/tarifashorarias.pdC
Comisión Federal de Electricidad CFE, Horario de Verano [en línea] [Fecha de consulta: Agosto 20031 Disponible en: <http://www.cfe.gob.mx/recursos/ Publicacion-id47/hrverano.htm>
RAMkEZ RIVERO, Alex. “Ahorro de energía eléctrica en edificios a través de la iluminación”. [en línea] Revista FIDE, Junio 1995, No. 15, pp. 22-26 [Fecha de consulta: Junio 20021 Disponible en: <http://www.fide.org.mx/servicios/revista5. html>
Michelle Pérez y Gene Foley, “Oportunidades para ahorrar energía y dinero en los Sistemas de Generación y Distribución de Vapor en Hoteles Mexicanos”, [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.ase.org/programs/illumi nacion.htm>
Motorola Semiconductor Technical Data, “Advanced Information Neuron Chip Distributed Communications and Control Processors”, 1992.
ALONSO, J. M.; Ribas, J; Calleja, A. J.; López, E.; y Rico, M.; “An Intelligent Neuron-Chip-Based Fluorescent Lamp Ballast for Indoor Applications”, IEEE Industry Applications Society, Annual Meeting, New Orleans, Louisiana, October 5-9, 1997.
ALONSO, J. M.; Ribas, J; Del Coz, J.; Calleja, A. J;. López, E; y Rico-Secades, M. “Intelligent Control System for Fluorescent Lighting Based on LonWorks Technology”, SAAEI’97, pp 347-352, Septiembre 1997.
Balastros con dimming, [en línea] [Fecha de consulta: Octubre 20021 Disponible en: <http://www.advancetransformer.com/>
Osram Sylvania, “Todo sobre DALi” [en línea] [Fecha de consulta: Octubre 20021 Disponible en: <http://www.osram.com/dalü>
R-1
Referencias
MultiDim, [en línea] [Fecha de consulta: Octubre 20021 Disponible en: <h ttp://www.eur.lighting.philips.com/int-en/oem/c~genera~ighlights/dimmin~p roducts/multidim.htmB
LumiSense, [en línea] [Fecha de consulta: Octubre 20021 Disponible en: <http://www.eur.lighting.philips.com/int-en/oem/ca/genera~highl~ghts/d~mming/p roducts/lumisense.html>
NORTH, Andy, Sistema RadioLink, [en línea] Orem, Utah, Marzo 2002, [Fecha de consulta: Junio 20021 Disponible en: <http://www.vantageinc.com/press/ CEARadioLink.htm>
GARCIA, Albert, ‘‘¿Qué es Bluetooth?’, [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.zonabluetooth.com/index.htm>
Hometronic [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.hometronic.com>
Lutron, Innovaciones y control de la iluminación [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.lutron.com>
“Receptor de Radio frecuencia con módulo de aparato, Módulos Domótica X10” [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.superinventos. com/S110127.htm>
El Proyecto inHaus (Centro inteligente de la innovación de Duisburg de la casa) [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.doc.ic.ac.uW project/2002/firs~eartopics/gO2tl7/intelligent/inhaus. b t m b
ALLEN, Bob; Berlo, Ad van; Ekberg, Jan; Fellbaum, Klaus; Hampicke, Maik; Willems, Charles. “Pautas de Diseño en casas automatizadas (Design Guidelines on Smart Homes)” [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.stakes.fúcost219/smarthousing.htm>
¿Que es XlO?, [en línea] [Fecha de consulta: Junio 20021 Disponible en: <http://www.edgenet.net/lingling/whatisxlO.html>
Nestor González Sainz, Comunicaciones y Redes de Procesamiento de Datos, Mc Graw Hill, 1993.
Marco Hemández, “Sistemas para automatizar la medición de variables eléctricas asociadas a consumo y demanda”, Tesis de maestría, CENIDET, Cuemavaca, Morelos, México, Julio de 1993.
J. Moreno V., “Sistema para la automatización de la iluminación en edificios” Tesis de Maestría, Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET), Cuemavaca, Morelos, México, junio 1996.
R-2

Referencias
Reza S. Raji, “Smart networks for control”, IEEE Spectrum, Vol. 31, No.6, Junio 1994, pp. 49-55.
Comisión Federal de Telecomunicaciones (COFETEL), [en línea] [Fecha de consulta: Septiembre 20021, disponible en: < http://www.cft.gob.mx/>.
Comisjón Federal de Comunicaciones (FCC), [en línea] [Fecha de consulta: Septiembre 20021, disponible en: <www.fcc.gov>.
Unión Internacional de Telecomunicaciones (ITU), [en línea] [Fecha de consulta: Septiembre 20021, disponible en: <www.itu.int/>.
Reglamento de Radiocomunicaciones Simplificado de la ITU, [en línea] [Fecha de consulta: Septiembre 20021, disponible en: <http://www.itu.int/ITU-Rb
C. F. Garcia, M. E. Gómez, “Curso de Diseño de enlaces de radio en la banda de UHF”. Instituto de Investigaciones Eléctricas, pág. 1-5,2-5,2-6, Septiembre 2002.
DIARIO OFICIAL DE LA FEDERACIÓN, SECRETARIA DE COMUNICACIONES Y TRANSPORTES, PROYECTO de Norma Oficial Mexicana PROY-NOM-121- SCT1-2001, Telecomunicaciones-Radiocomunicación-Sistemas de radiocomunicación que emplean la técnica de espectro disperso, Viernes 8 de febrero de 2002
Reglamento de Telecomunicaciones de México, [en línea] [Fecha de consulta: Septiembre 20021, disponible en: <http://www.sctgob.mx/marco/reglamentosdel sector/telecom/>.
Linx Technologies, [en línea] [Fecha de consulta: Septiembre 20021, disponible en: <http://www.linxtechnologies.com/>,
Scout Mueller, “Manual de actualización y reparación de PCs”. Ed. Prentice Hall.
Rifat A. Dayem, “Mobile Data & Wireless LAN Technologies”, Ed. Prentice Hall. 1998
Tanenbaum Andrew S., “Redes de computadoras”. Tercera edición, Ed. Prentice Hall, 1996.
Tanenbaum Andrew S., “Organización de Computadoras Un Enfoque Estructurado”, Prentice Hall, 1992, pag, 68-74.
José Angulo, Susana Romero, Ignacio Angulo, Microcontroladores PIC Diseño práctico de aplicaciones segunda parte, Primera edición, Editorial McGrawHill.
José Angulo, Ignacio Angulo, Microcontroladores PIC Diseño práctico de aplicaciones, Primera edición, Editorial McGrawHill.
R-3

PIC16F62X FLASH-Based 8-Bit CMOS Microcontrollers. Microchip Technology Inc.
PICmicro MID-Range Mcu Family. Section 18: USART. Microchip Technology Inc.
Application Note AN547. Serial Port Utilities. Microchip Technology Inc.
MPLABB D E , Simulator, Editor, User’s Guide. Microchip Technology Inc.
Joe Campbell, Ed. Howard W., “C Programmer’s Guide to Serial Communications”, Sams & Company, 1987, Capítulo 19.
Ronald J. Tocci, “Sistemas digitales principios y aplicaciones”, Segunda edición, Ed. Prentice Hall, págs. 37-39.
Uyles Black, “Redes de computadores, Protocolos, nomas e interfaces”, Segunda edición, Ed. Alfaomega
Fred Halsall, “Data Communication, Computer Networks and Open Systems”, Tercera edición, Ed. Addison-Wesley
Douglas E. Comer, “Redes de computadoras, Internet e Interredes”, Primera Edición, Ed. Prentice Hall.
Productos para el sistema Multidim de Philips, Infrared Receiver Philips iRR 8124, [en linea] [Fecha de consulta: Julio 20031, disponible en: <http://www.eur.lighting. philips.com/int~en/oem/calgeneral/highl~ghts/d~mm~ng/index.html, Junio 2003>.
infrared Data Association, #Physical Layer Link Specification”, Noviembre 1997
“List of Definitions for Interchange Circuits between Data Terminal Equipment @TE) and Data Circuit - Terminating Equipment (DCE)”, ITU-T V.24 (BB 8.1, 1998).
Application Note A N 5 5 5 . Software Implementation of Asyncronous Serial UO. Microchip Technology Inc.
Klander, “C/C++ Programmer’s Bible”, Jamsa Press.
0 3 - 8 6 2 3
CENTRO DI? INFORMACION “““I SEP CENIDET I R-4


















