compensadores 2da parte
79
DISEÑO DE CONTROLADORES COMPENSACIÓN DE ATRASO- ADELANTO
-
Upload
berly-ticona-apaza -
Category
Documents
-
view
25 -
download
0
description
control
Transcript of compensadores 2da parte

DISEÑO DE CONTROLADORES
COMPENSACIÓN DE ATRASO-ADELANTO
Contenido
� 1.
COMPENSACIÓN DE ATRASO-ADELANTO
� La compensación de adelanto básicamente acelera la respuestae incrementa la estabilidad del sistema
� La compensación de atraso mejora la precisión en estado establedel sistema, pero reduce la velocidad de la respuesta.
Respuesta transitoria
Respuesta es estado estable
Adelanto
Atraso
MEJORA COMPENSADOR
COMPENSADOR ATRASO ADELANTO
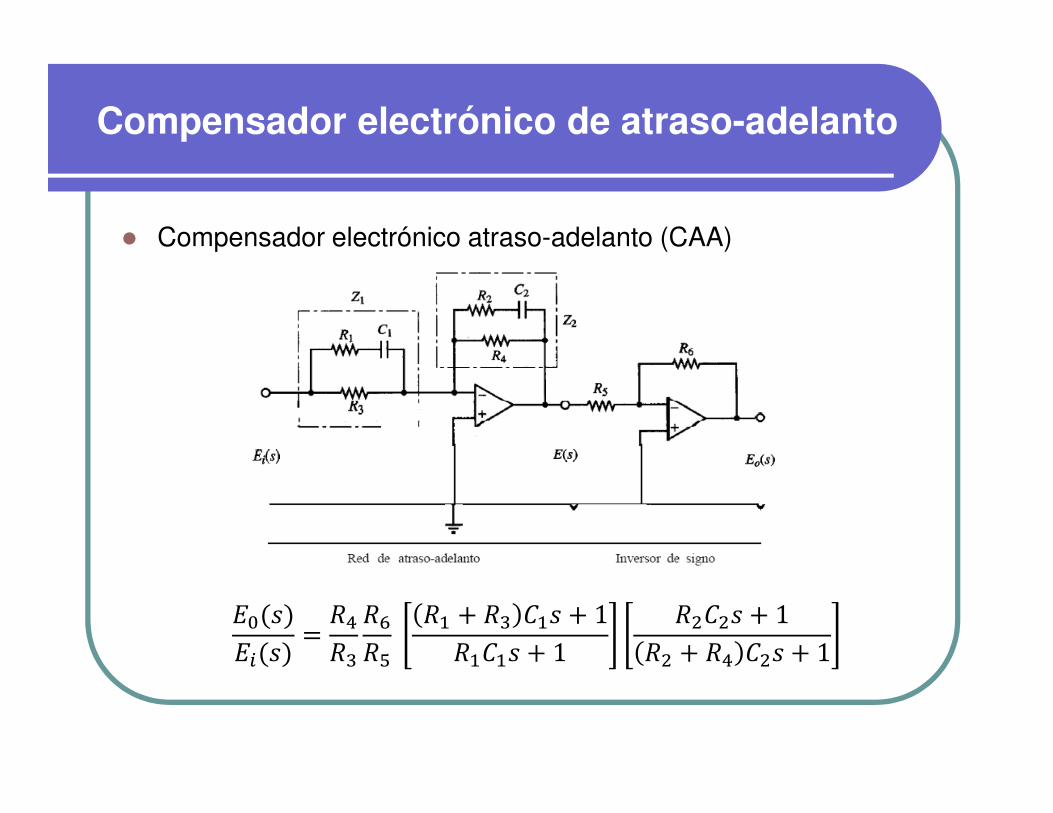
Compensador electrónico de atraso-adelanto
� Compensador electrónico atraso-adelanto (CAA)
���������� ���
���� �� � � ��� � 1
����� � 1����� � 1
�� � � ��� � 1

� La función de transferencia
� Donde:
���������� ���
���� �� � � ��� � 1
����� � 1����� � 1
�� � � ��� � 1���������� � � ��� � 1
��� � � 1��� � 1���� � 1
�� � �� � � �� ��� � ������� � �� � � �� ��� ����
� � ������
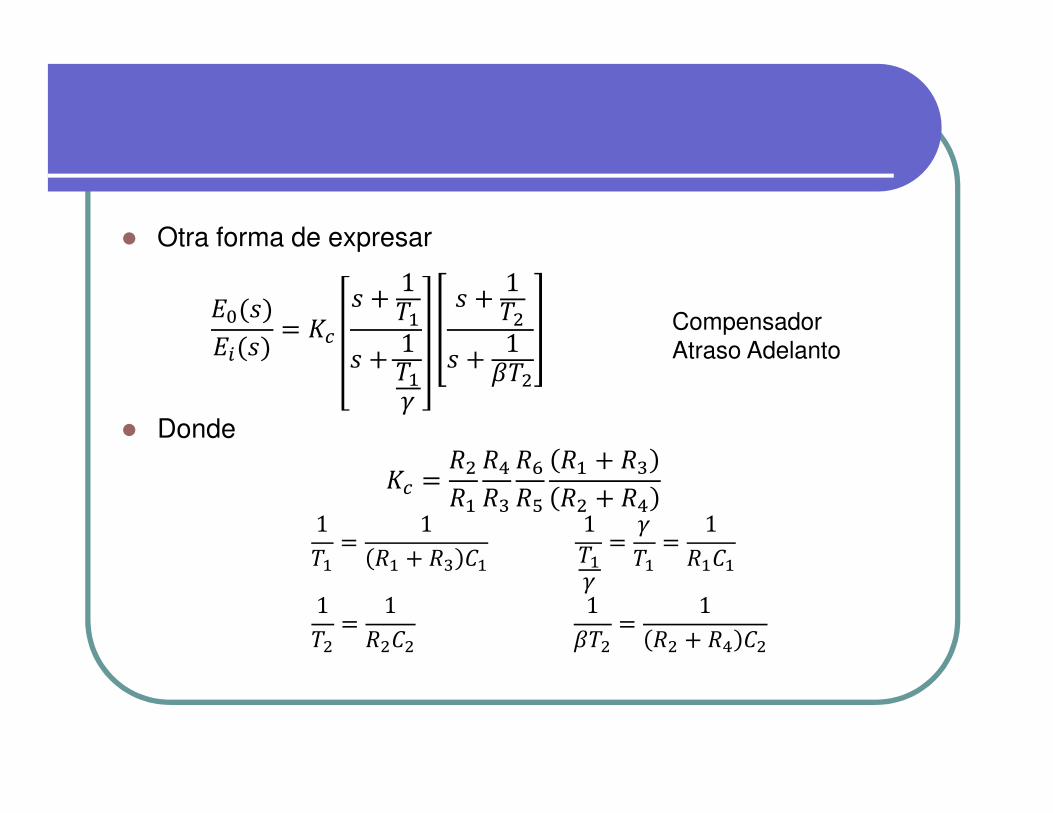
� Otra forma de expresar
� Donde
���������� � ��� � 1��� � 1���
� � 1��� � 1���
�� � ������
������ � ��� � �1
�� �1
�� � � �� 1���
� ��� �
1����
1�� �1
���� 1��� �
1�� � � ��
Compensador Atraso Adelanto
Técnicas de compensación de atraso-adelanto basadas en el LGR
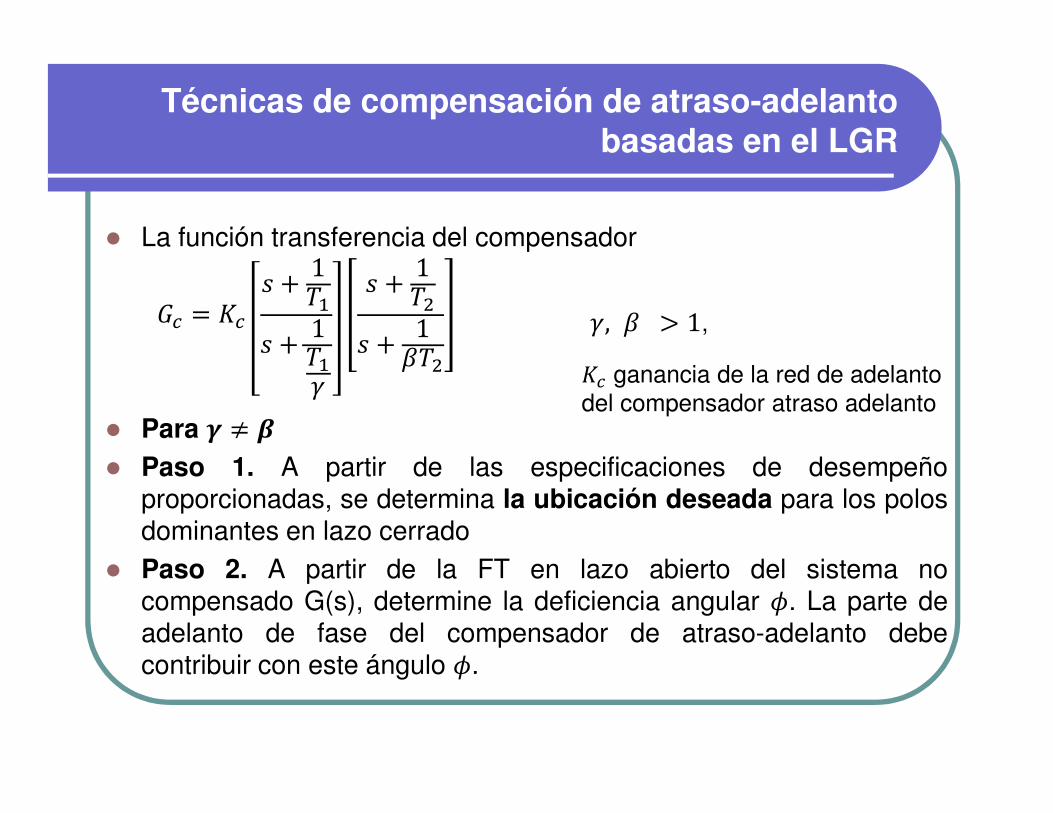
� La función transferencia del compensador
� Para � ≠ �� Paso 1. A partir de las especificaciones de desempeño
proporcionadas, se determina la ubicación deseada para los polosdominantes en lazo cerrado
� Paso 2. A partir de la FT en lazo abierto del sistema nocompensado G(s), determine la deficiencia angular �. La parte deadelanto de fase del compensador de atraso-adelanto debecontribuir con este ángulo �.
�� � ��� � 1��� � 1���
� � 1��� � 1���
�, � > 1,
�� ganancia de la red de adelanto del compensador atraso adelanto
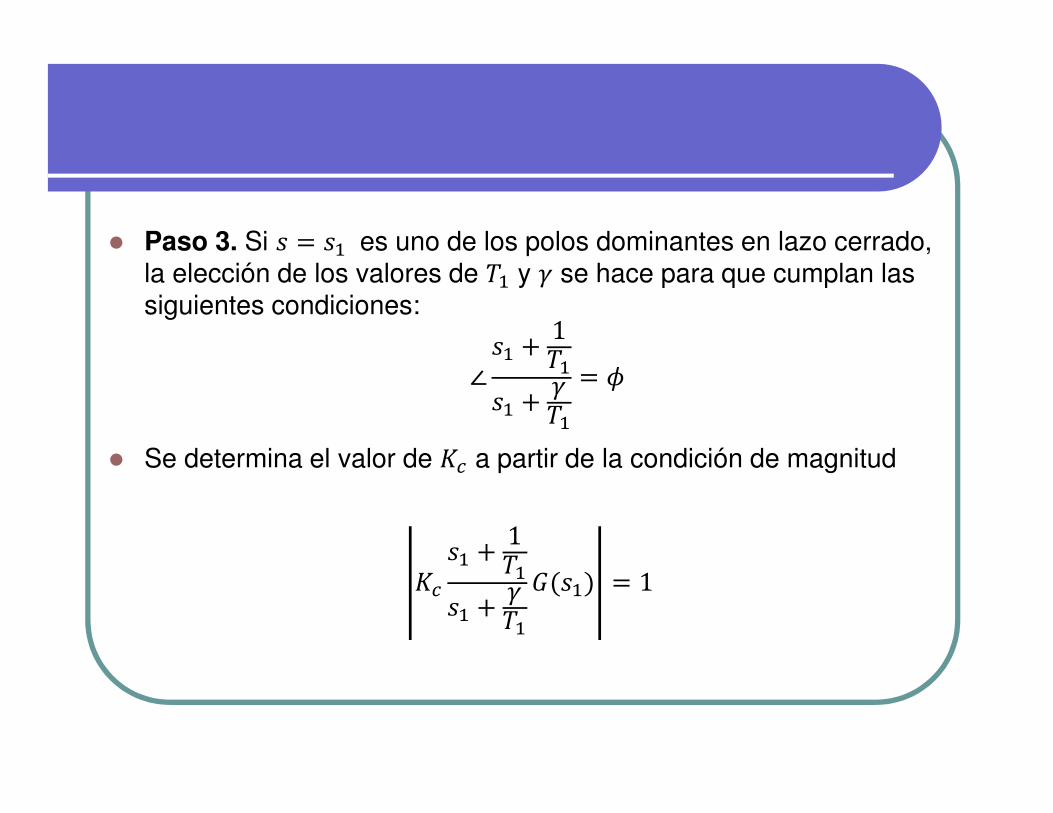
� Paso 3. Si � � �� es uno de los polos dominantes en lazo cerrado, la elección de los valores de �� y � se hace para que cumplan las siguientes condiciones:
� Se determina el valor de �� a partir de la condición de magnitud
∠�� �1��
�� � ���� �
���� � 1���� � ���
����� � 1

� Paso 4. Si se da la constante de error estático de velocidad � , se determina el valor de � para satisfacer el requerimiento de la constante.
� � lim$→� ��� � � � � lim$→� ���� � 1��� � 1���
� � 1��� � 1���
� �
� lim$→� ���1�����
1��1���� �
� � lim$→� ����� � � De esta ecuación se halla �
� Paso 5. Seleccionar el valor de �� tal que cumpla las condicionessiguientes ���&'()*+�:
�� � 1���� � 1���
≅ 1 −5° < �� �1��
�� � 1���< 0°

Ejemplo 4.1
� Considere el sistema G(s), con realimentación unitaria. Cuya función de transferencia de la trayectoria directa es
� Diseñe un compensador para cumplir las especificaciones de desempeño 2 � 0.5, 45 � 5'(*/�+& y � � 80�+&8�
� Solución� La función de transferencia de lazo abierto es:
� La función de transferencia de lazo cerrado de sistema:
� � � 4��� � 0.5�
� � � 4��� � 0.5� �
4�� � 0.5�
� ����� �
����1 � ���� �
4��� � 0.5� � 4 �
4�� � 0.5� � 4

� Los polos de lazo cerrado
� De donde se obtiene
� La constante de error estático de velocidad
� � −0.2500 ± <1.984345 � 2'(*/�+&2 � 0.125
� � lim$→� ������ lim$→� �
4��� � 0.5� � lim$→�
4�� � 0.5�
� � 8�+&8�
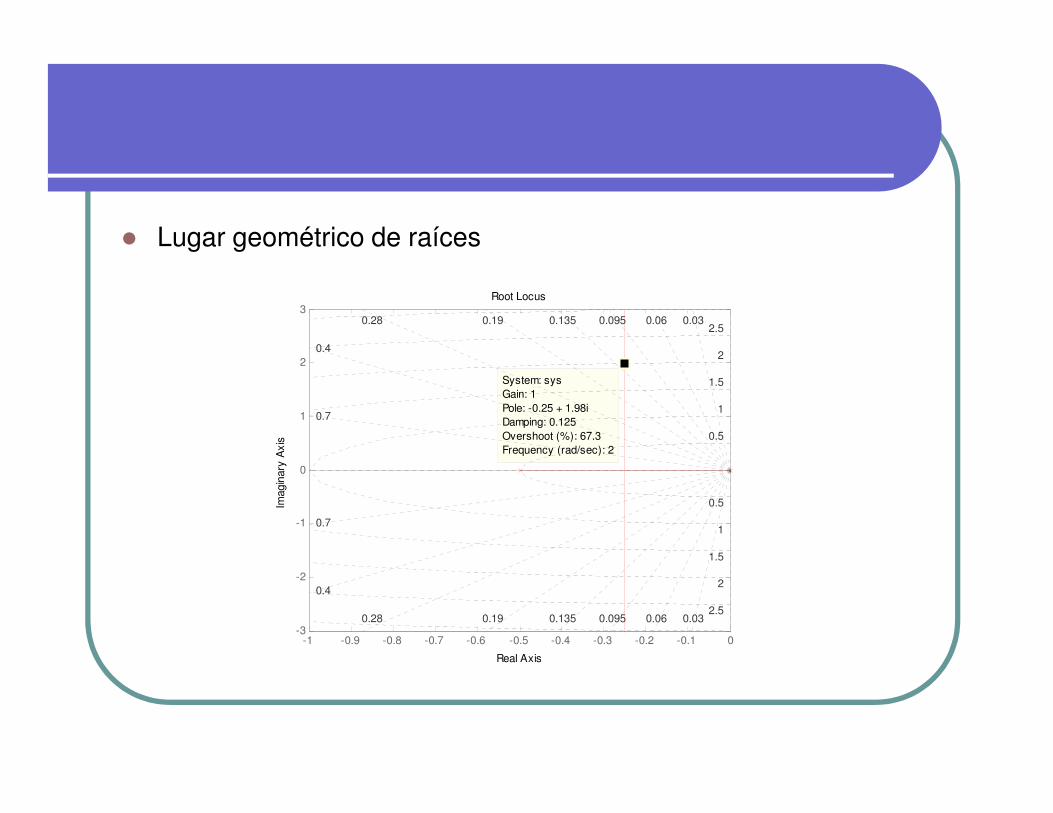
� Lugar geométrico de raíces
Root Locus
Real Axis
Imag
inar
y A
xis
-1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0-3
-2
-1
0
1
2
3
0.7
0.030.060.0950.1350.190.28
0.4
0.7
0.5
1
1.5
2
2.5
0.5
1
1.5
2
2.5
3
System: sysGain: 1Pole: -0.25 + 1.98iDamping: 0.125Overshoot (%): 67.3Frequency (rad/sec): 2
0.030.060.0950.1350.190.28
0.4
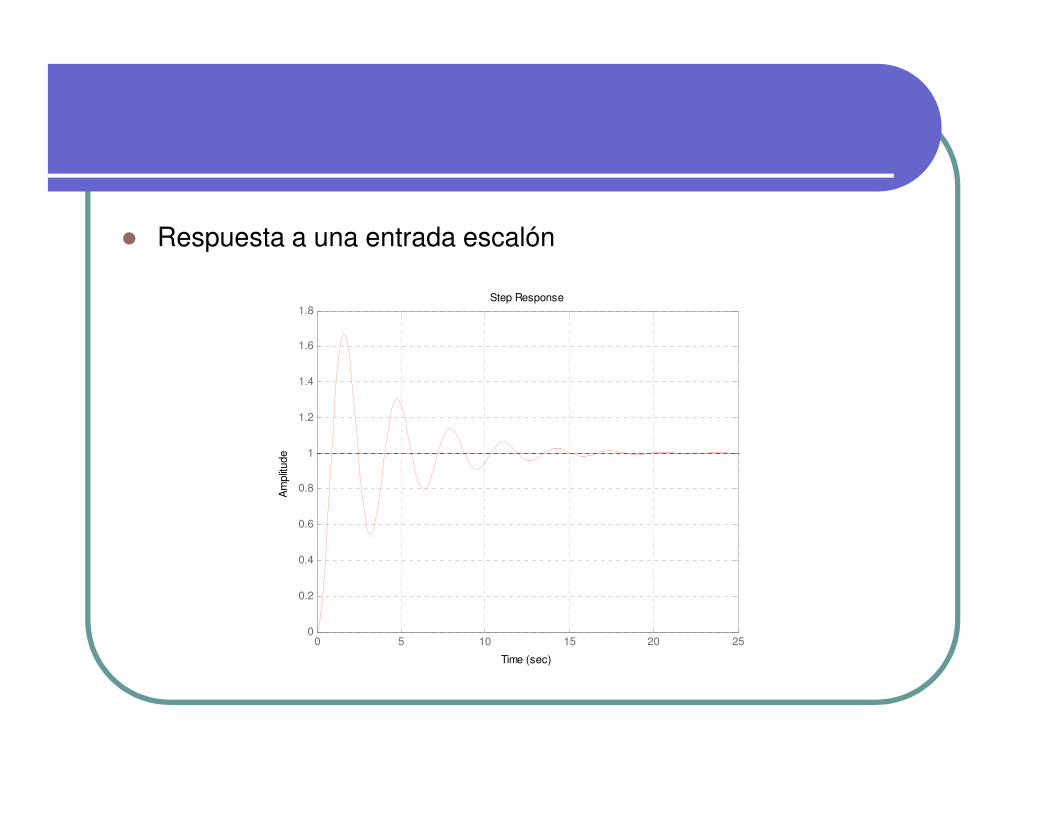
� Respuesta a una entrada escalón
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Step Response
Time (sec)
Am
plitu
de

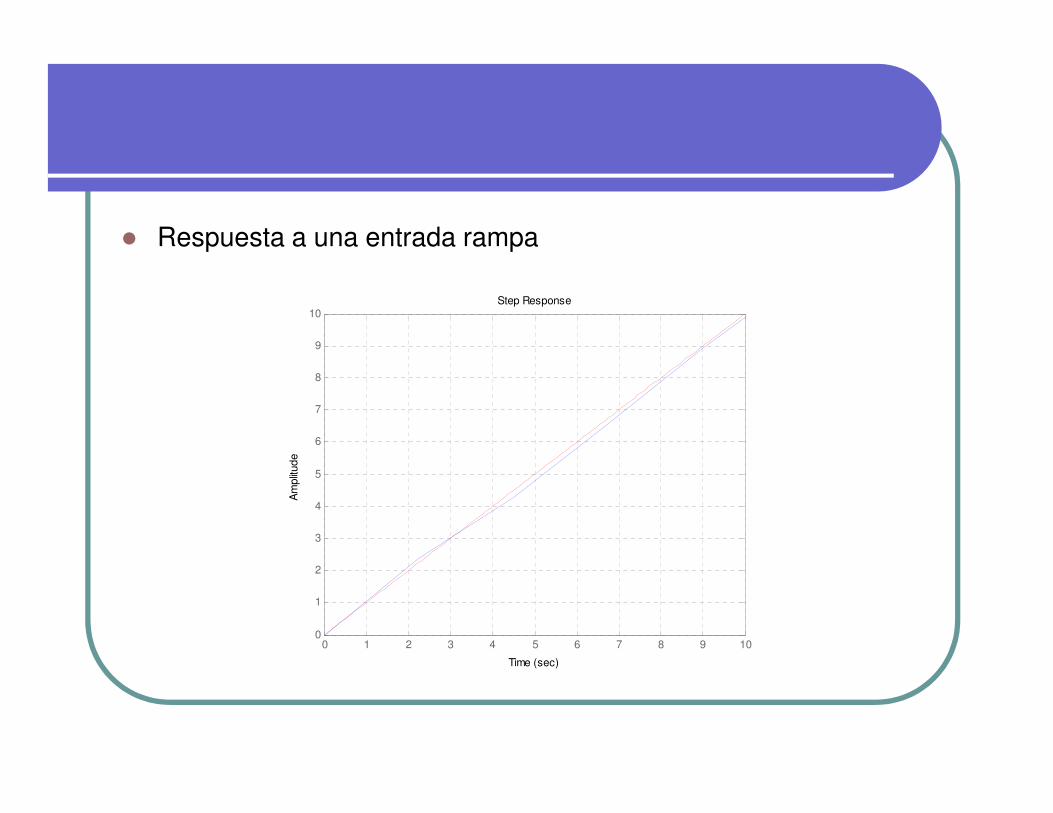
� Respuesta a una entrada rampa
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10Step Response
Time (sec)
Am
plitu
de
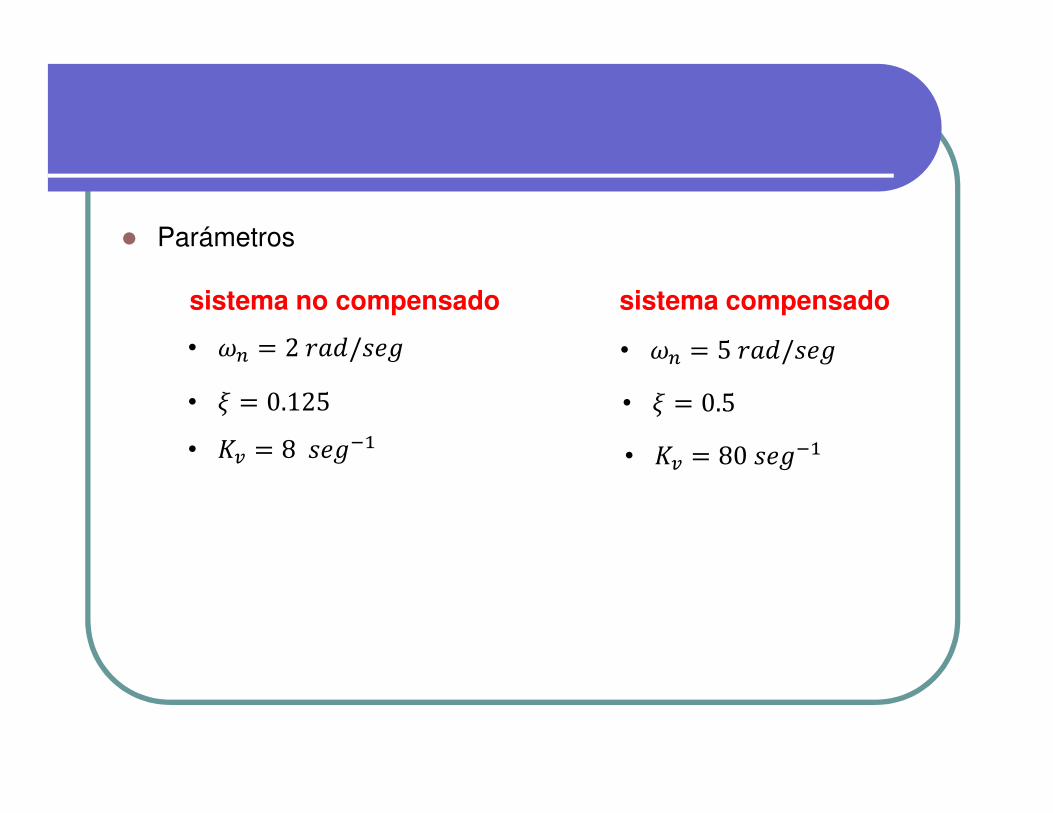
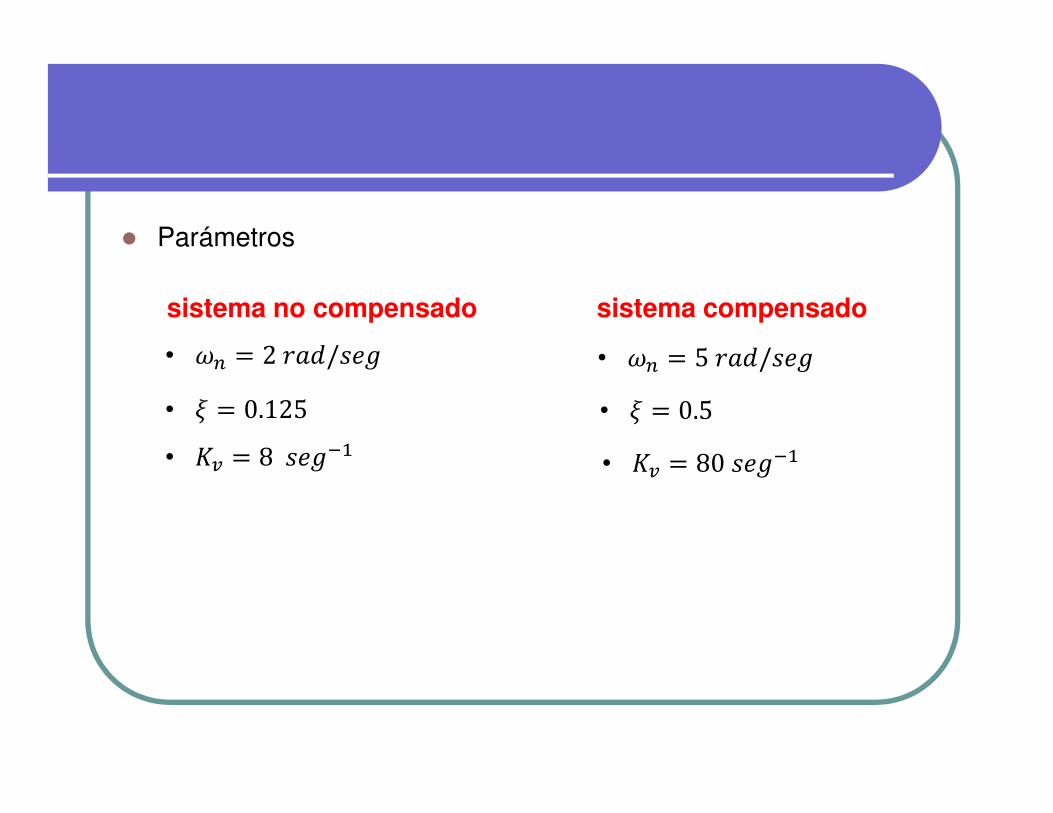
� Parámetros
• 45 � 2'(*/�+&• 2 � 0.125• � � 8�+&8�
• 2 � 0.5• 45 � 5'(*/�+&
• � � 80�+&8�
sistema no compensado sistema compensado
� Paso 1. Polos deseados en lazo cerrado (parámetros de desempeño)
� Paso 2. deficiencia de ángulo �• 2 � 0.5• 45 � 5'(*/�+& � � −245 ± 4?
� � −2.5 ± <4.3301
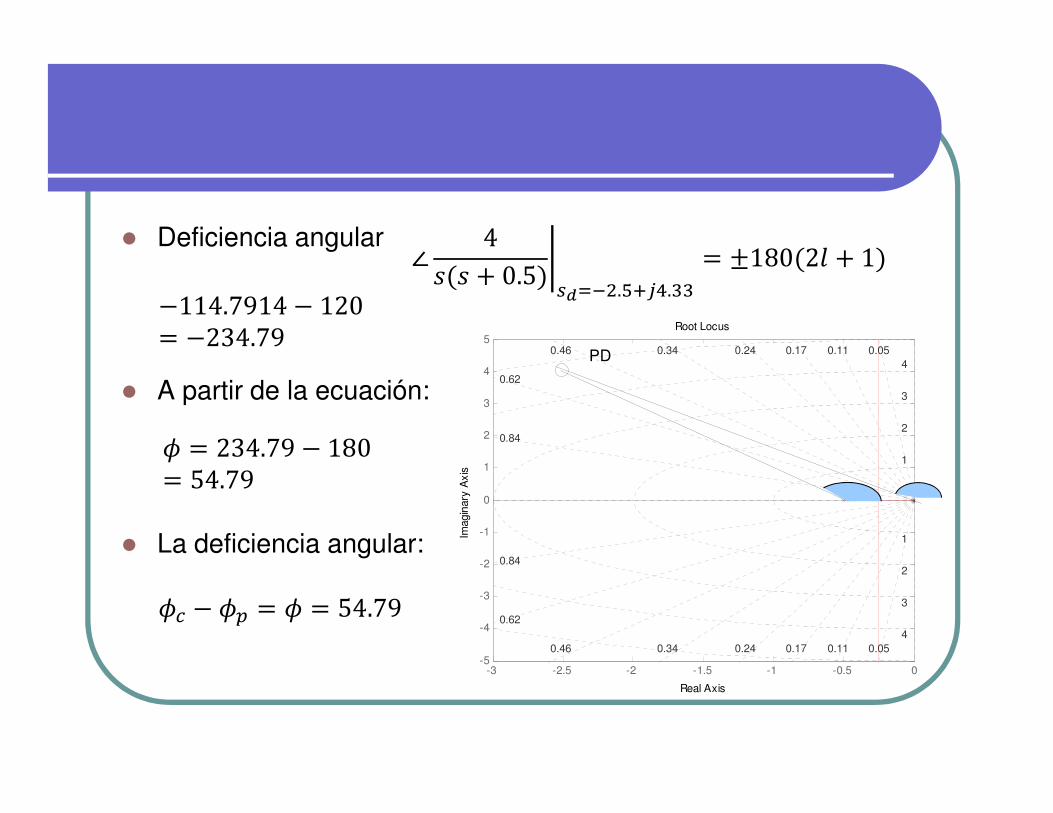
� Deficiencia angular
� A partir de la ecuación:
� La deficiencia angular:
∠ 4��� � 0.5�@$AB8�.�CD.
� ±180�2E � 1�
� � 234.79 − 180� 54.79
�� − �G � � � 54.79
−114.7914 − 120� −234.79
-3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
5
0.050.110.170.240.340.46
0.62
0.84
1
2
3
4
1
2
3
4
5
0.050.110.170.240.340.46
0.62
0.84
Root Locus
Real Axis
Imag
inar
y A
xis
PD
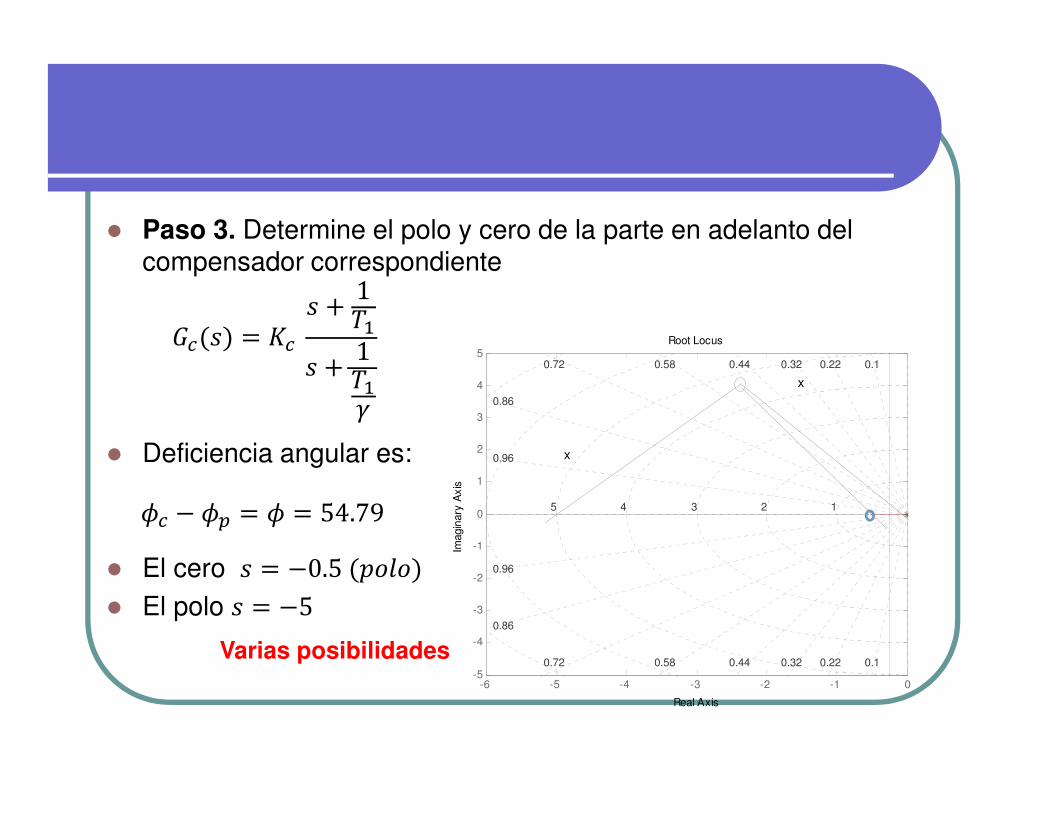
� Paso 3. Determine el polo y cero de la parte en adelanto del compensador correspondiente
� Deficiencia angular es:
� El cero � � −0.5�HIEI�� El polo � � −5
-6 -5 -4 -3 -2 -1 0-5
-4
-3
-2
-1
0
1
2
3
4
50.10.220.320.440.580.72
0.86
0.96
0.10.220.320.440.580.72
0.86
0.96
123456
Root Locus
Real Axis
Imag
inar
y A
xis
����� � ��� � 1��� � 1���
�� − �G � � � 54.79
x
x
Varias posibilidades
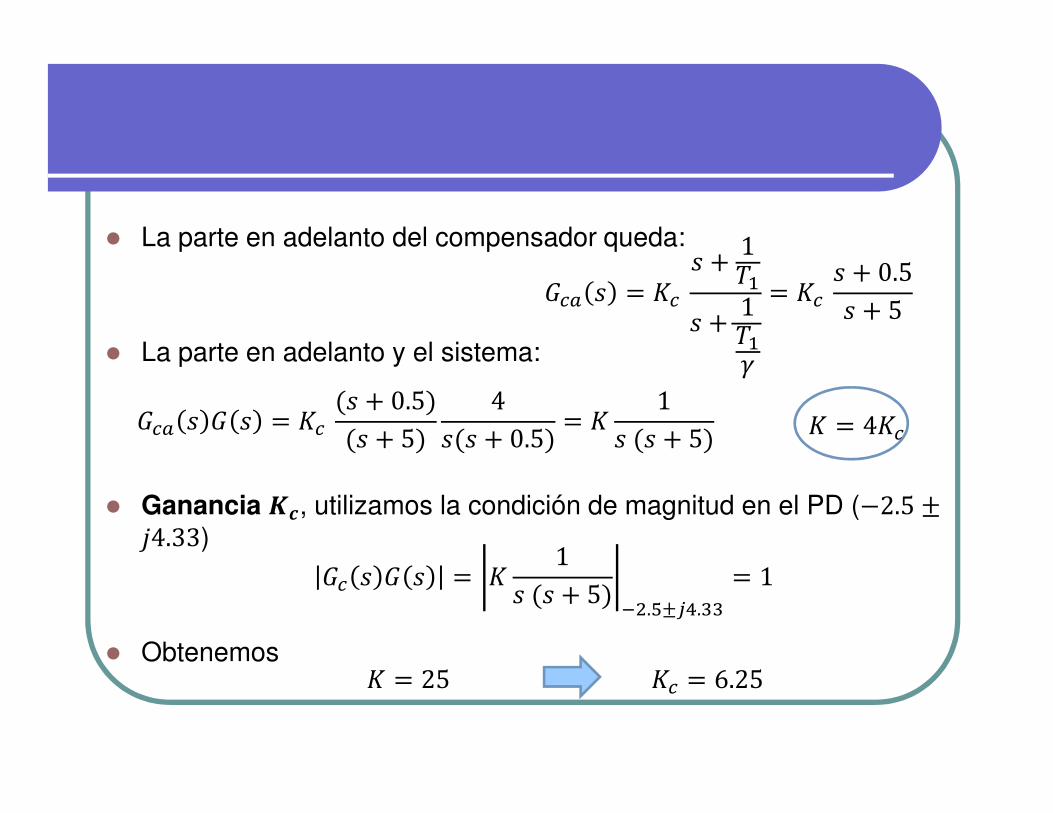
� La parte en adelanto del compensador queda:
� La parte en adelanto y el sistema:
� Ganancia JK, utilizamos la condición de magnitud en el PD (−2.5 ±<4.33)
� Obtenemos
��L � � ��� � 1��� � 1���
� �� � � 0.5� � 5
��L � � � � �� �� � 0.5��� � 5�
4��� � 0.5� � � 1
��� � 5�
�� � � � � � 1��� � 5� 8�.�±D.
� 1
�� � 6.25� � 25
� � 4��
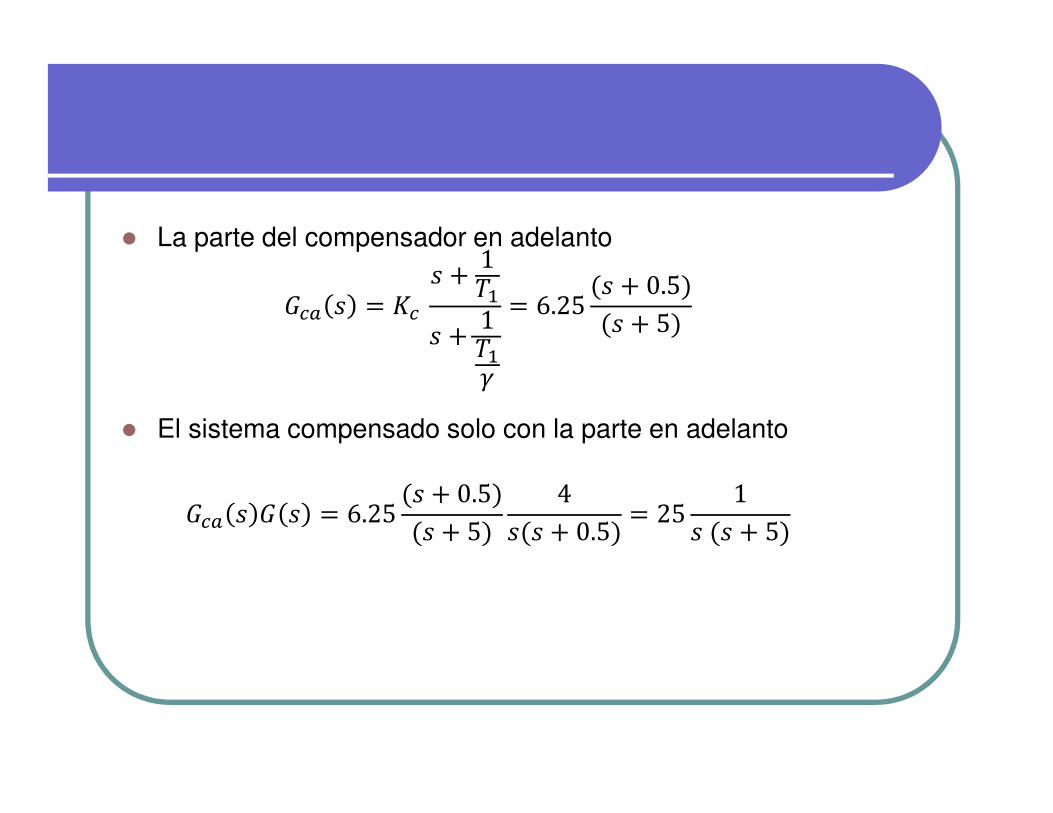
� La parte del compensador en adelanto
� El sistema compensado solo con la parte en adelanto
��L � � ��� � 1��� � 1���
� 6.25 �� � 0.5��� � 5�
��L � � � � 6.25 �� � 0.5��� � 5�
4��� � 0.5� � 25 1
��� � 5�
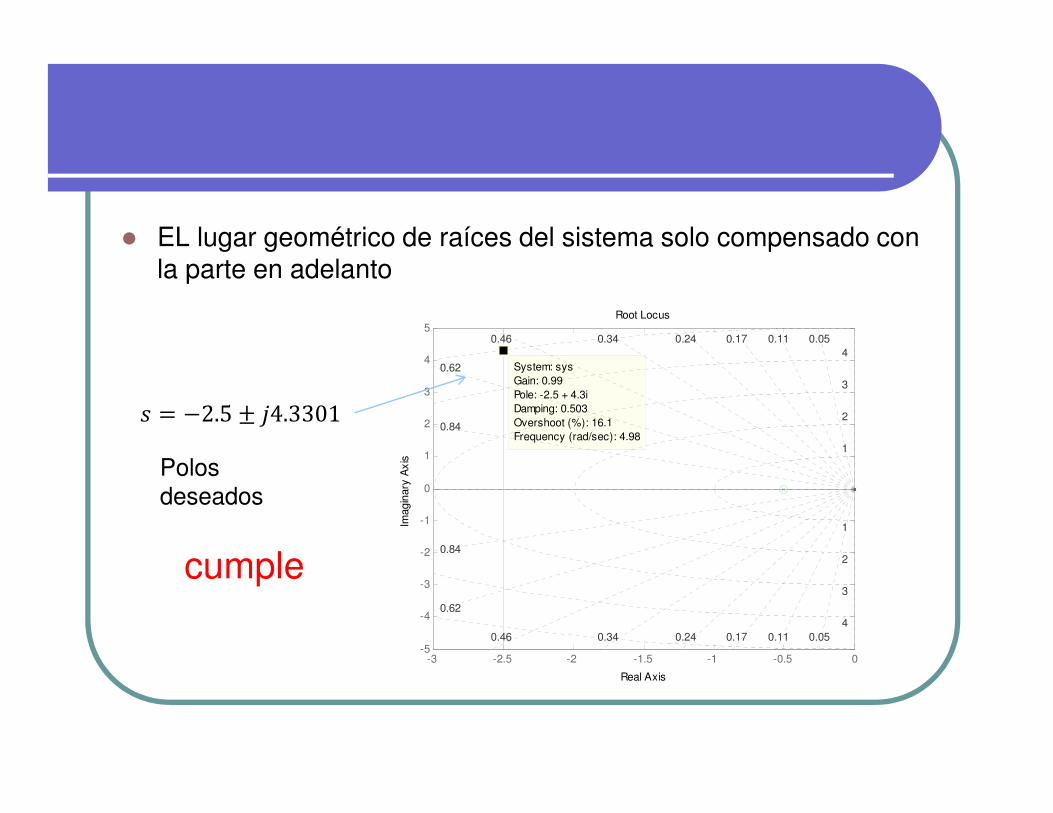
� EL lugar geométrico de raíces del sistema solo compensado con la parte en adelanto
Root Locus
Real Axis
Imag
inar
y A
xis
-3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
50.46
0.62
0.84
0.050.110.170.240.340.46
0.62
0.84
1
2
3
4
1
2
3
4
5
System: sysGain: 0.99Pole: -2.5 + 4.3iDamping: 0.503Overshoot (%): 16.1Frequency (rad/sec): 4.98
0.050.110.170.240.34
� � −2.5 ± <4.3301Polos deseados
cumple
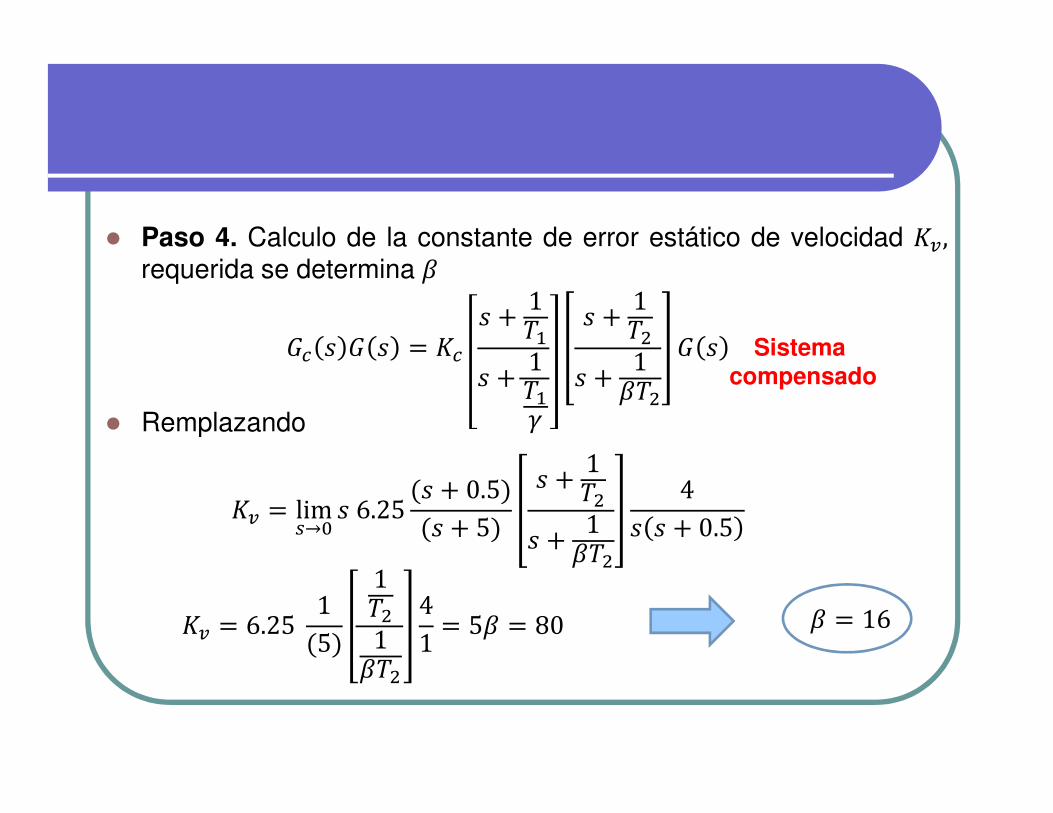
� Paso 4. Calculo de la constante de error estático de velocidad � ,requerida se determina �
� Remplazando
� � lim$→� �6.25�� � 0.5��� � 5�
� � 1��� � 1���
4� � � 0.5
�� � � � � ��� � 1��� � 1���
� � 1��� � 1���
� �
� � 6.25 1�5�1��1���
41 � 5� � 80 � � 16
Sistema compensado
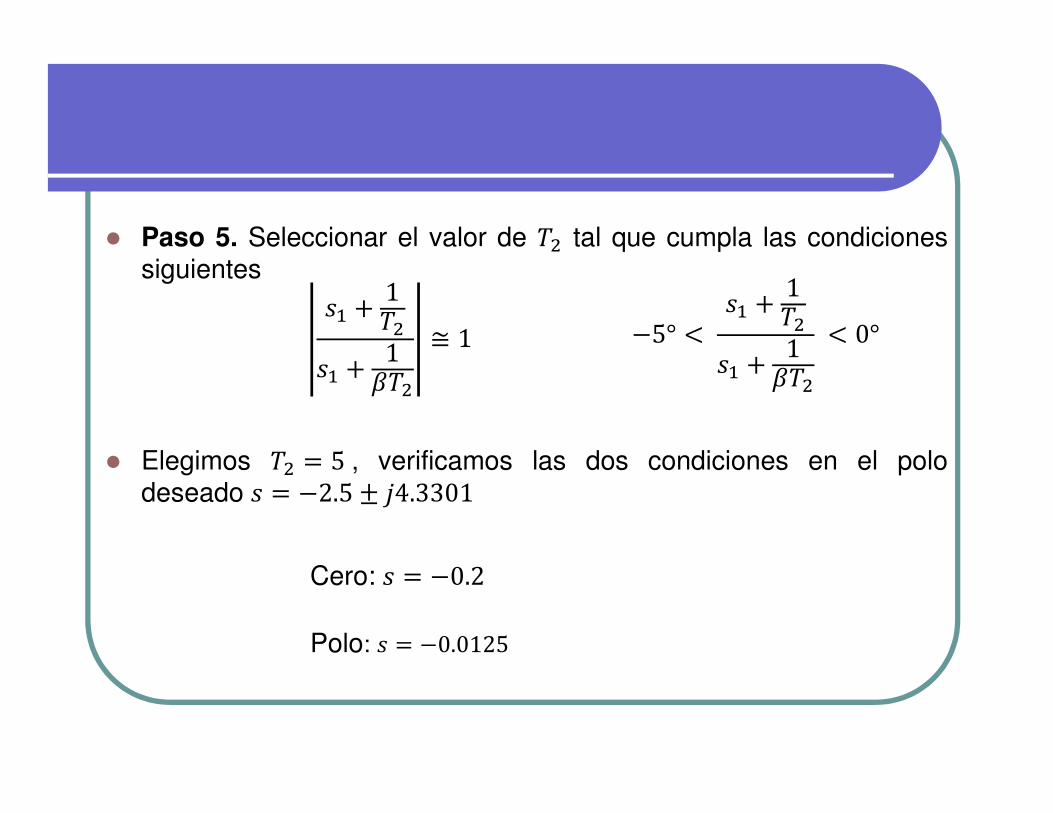
� Paso 5. Seleccionar el valor de �� tal que cumpla las condicionessiguientes
� Elegimos �� � 5 , verificamos las dos condiciones en el polodeseado � � −2.5 ± <4.3301
�� � 1���� � 1���
≅ 1 −5° < �� �1��
�� � 1���< 0°
Cero: � � −0.2Polo: � � −0.0125

� Magnitud
� Angulo
�� � 1���� � 1��� $�B8�.�CD.��
� � � 0.2� � 0.0125 8�.�CD.��
� 0.98 ≅ 1
∠ −2.5 � <4.3301 � 0.2−2.5 � <4.3301 � 0.0125
� −N()8� 4.33012.3 �N()8� 4.3301
2.4875
−5° < �� �1��
�� � 1���< 0°
� −62.0243 � 60.1240 � −1.9003° Cumple

� El compensador tendrá la función de transferencia de lazo abierto
����� � ��� � 1��� � 1���
� � 1��� � 1���
� 6.25 �� � 0.5��� � 5�
�� � 0.2��� � 0.0125� �
����� � 6.25�� � 4.37� � 0.625�� � 5.0125� � 0.0625
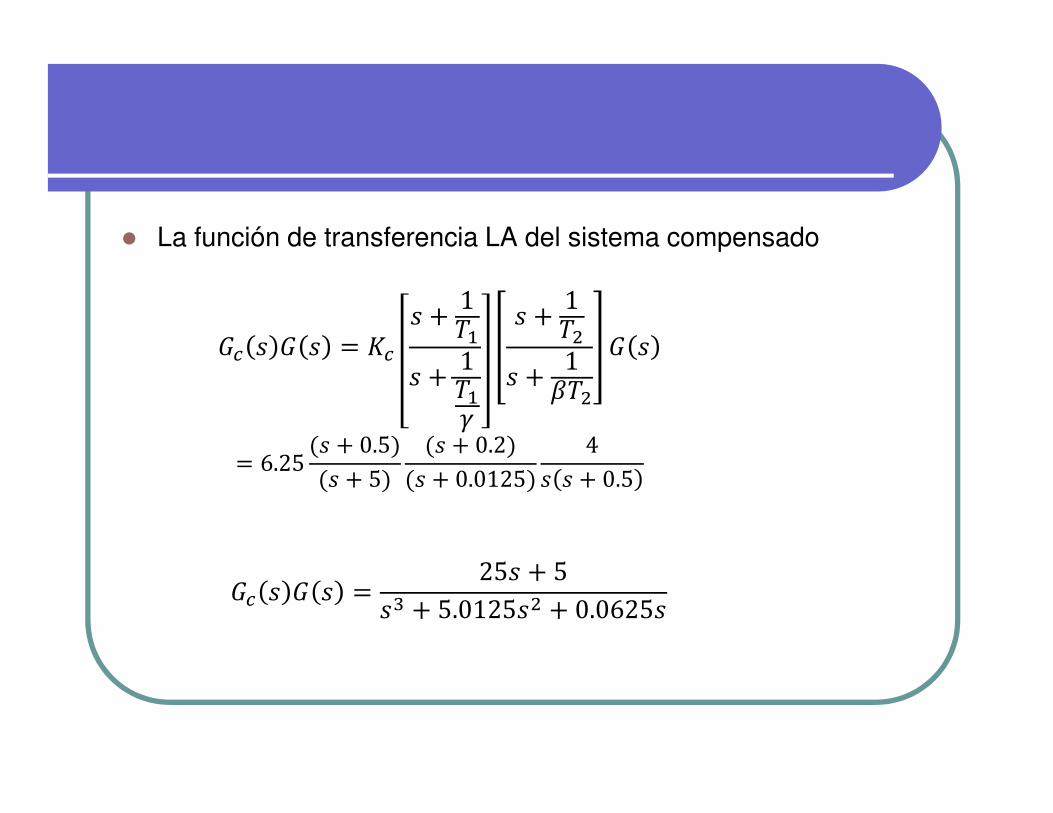
� La función de transferencia LA del sistema compensado
�� � � � � ��� � 1��� � 1���
� � 1��� � 1���
� �
� 6.25 �� � 0.5��� � 5�
�� � 0.2��� � 0.0125�
4� � � 0.5
�� � � � � 25� � 5� � 5.0125�� � 0.0625�
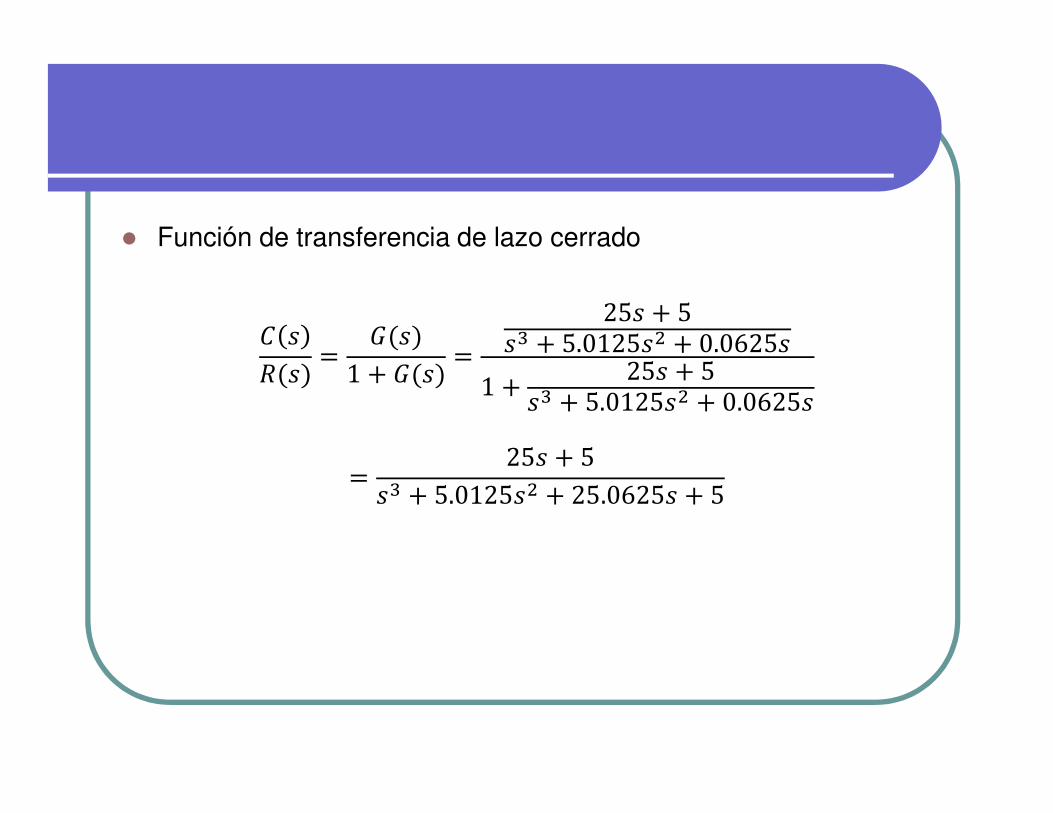
� Función de transferencia de lazo cerrado
� ����� �
����1 � ���� �
25� � 5� � 5.0125�� � 0.0625�1 � 25� � 5� � 5.0125�� � 0.0625�
� 25� � 5� � 5.0125�� � 25.0625� � 5
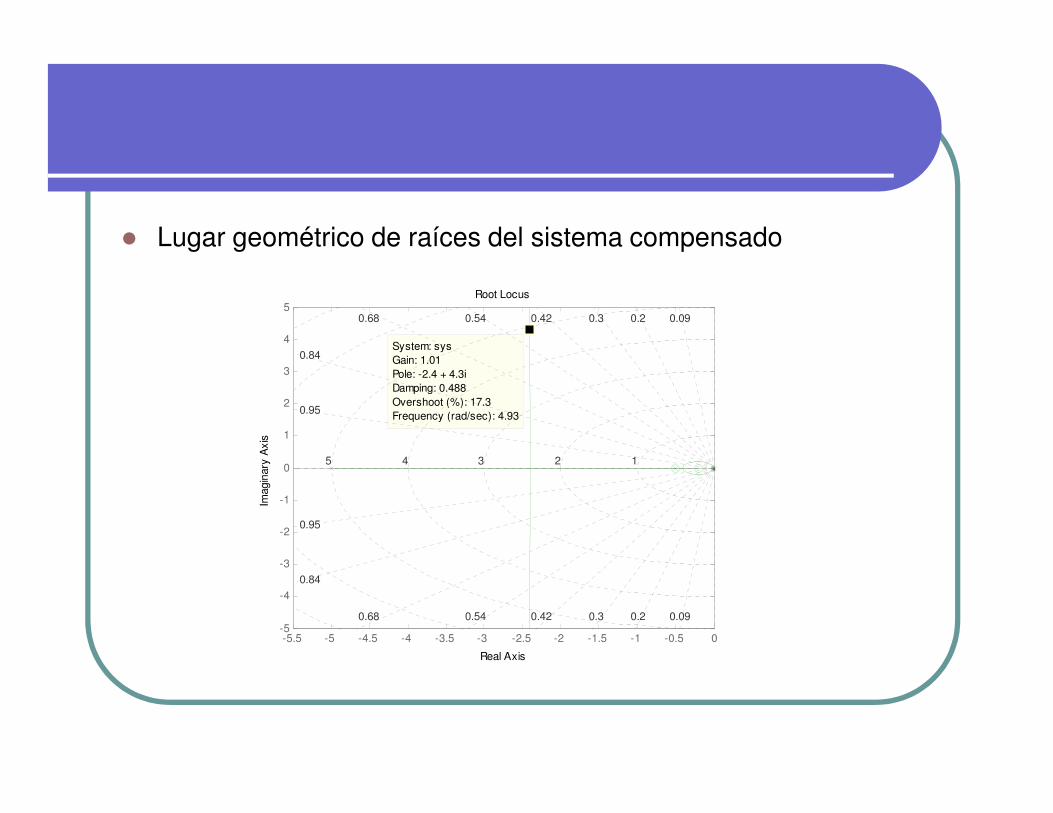
� Lugar geométrico de raíces del sistema compensado
Root Locus
Real Axis
Imag
inar
y A
xis
-5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
50.420.540.68
0.84
0.95
0.090.20.30.420.540.68
0.84
0.95
12345
System: sysGain: 1.01Pole: -2.4 + 4.3iDamping: 0.488Overshoot (%): 17.3Frequency (rad/sec): 4.93
0.090.20.3
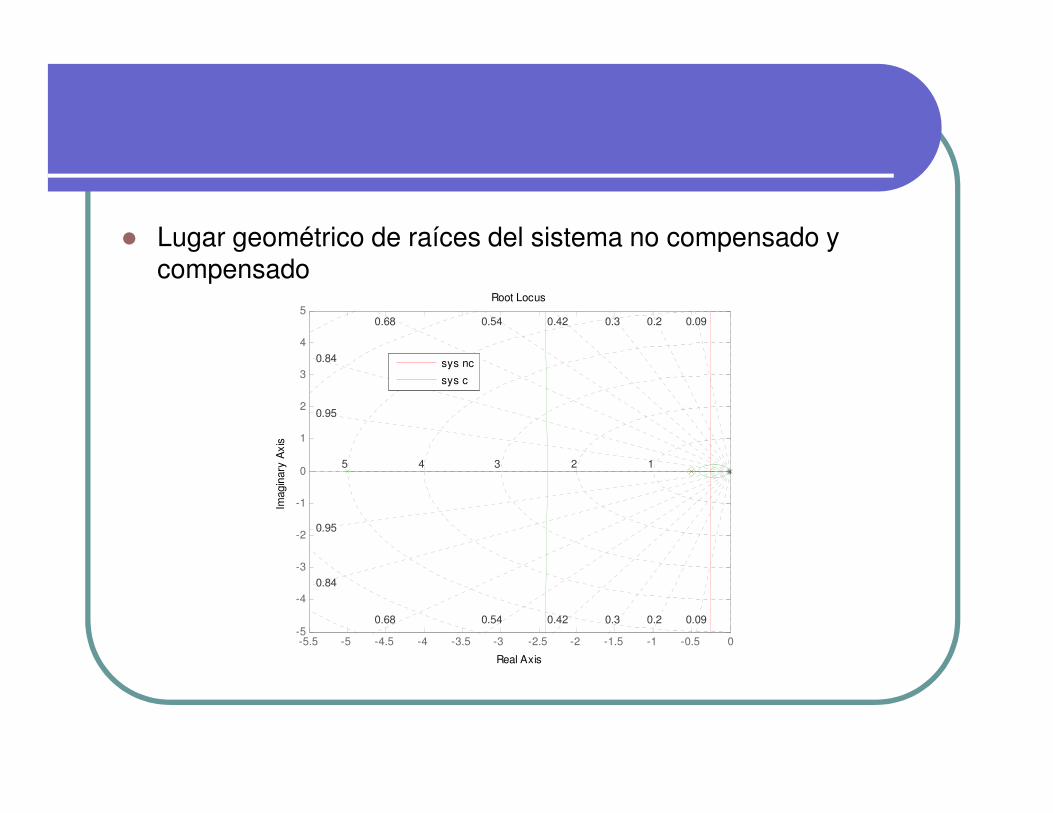
� Lugar geométrico de raíces del sistema no compensado y compensado
-5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
50.420.540.68
0.84
0.95
0.090.20.30.420.540.68
0.84
0.95
12345
0.090.20.3
Root Locus
Real Axis
Imag
inar
y A
xis
sys nc
sys c
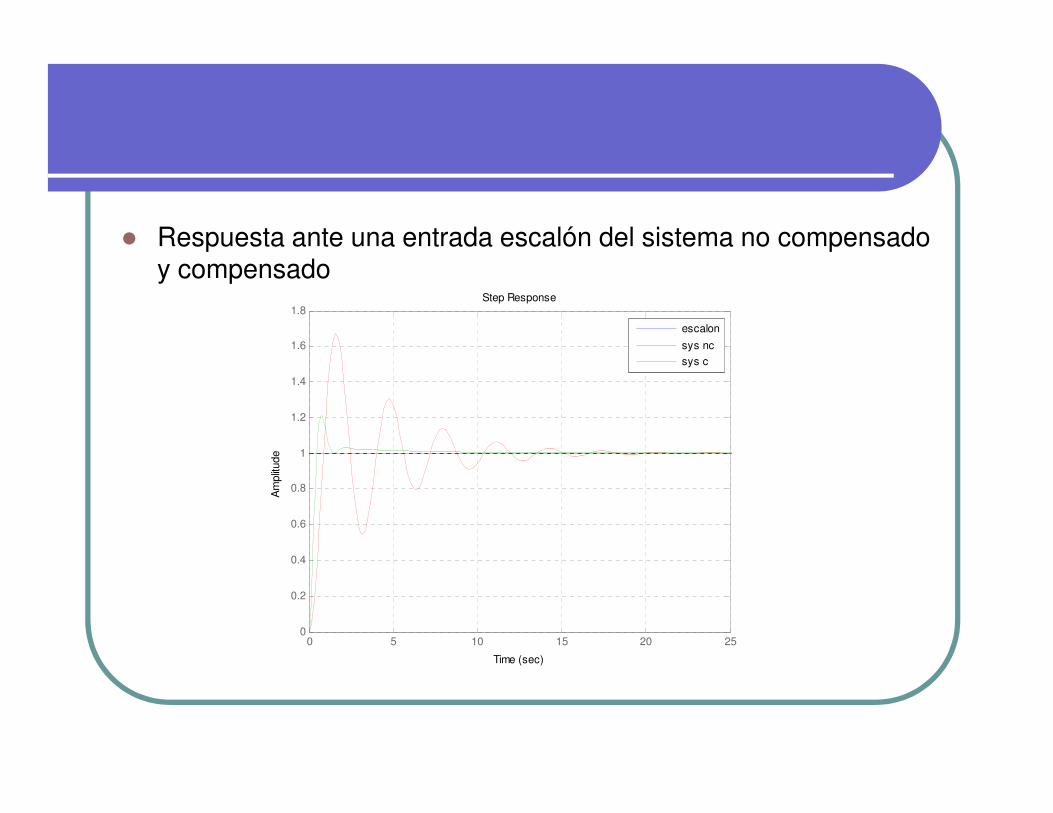
� Respuesta ante una entrada escalón del sistema no compensado y compensado
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Step Response
Time (sec)
Am
plitu
de
escalon
sys nc
sys c
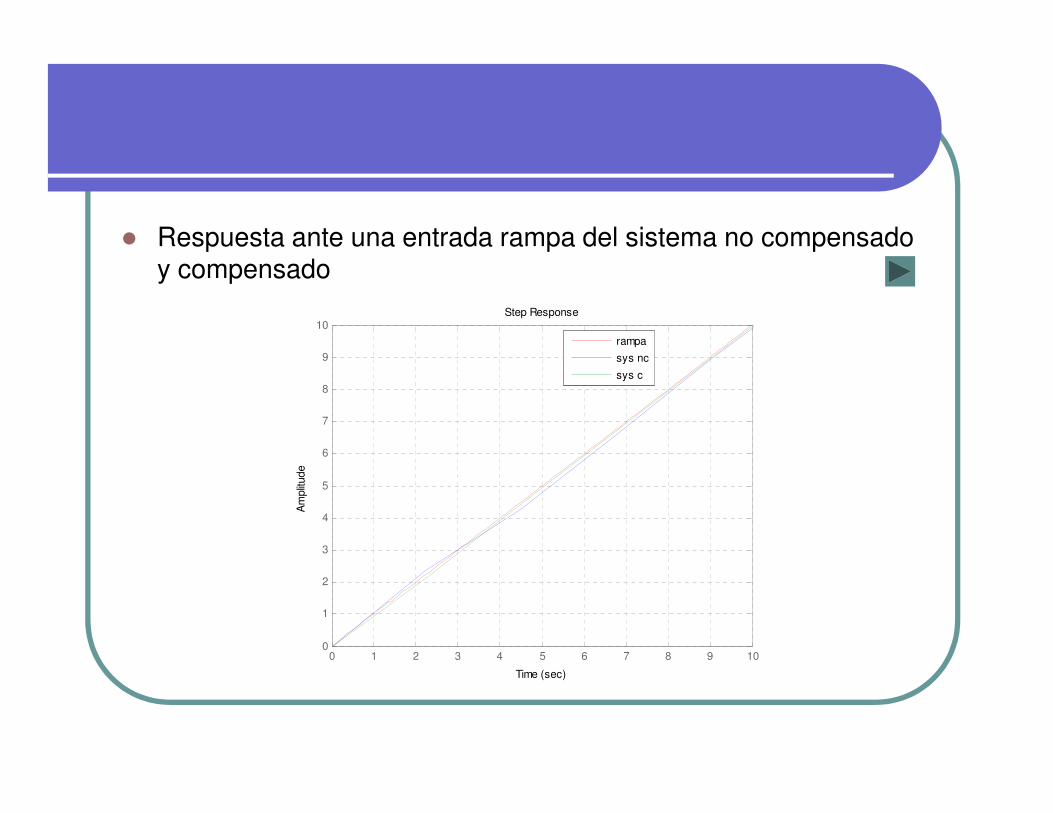
� Respuesta ante una entrada rampa del sistema no compensado y compensado
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10
Step Response
Time (sec)
Am
plitu
de
rampa
sys nc
sys c
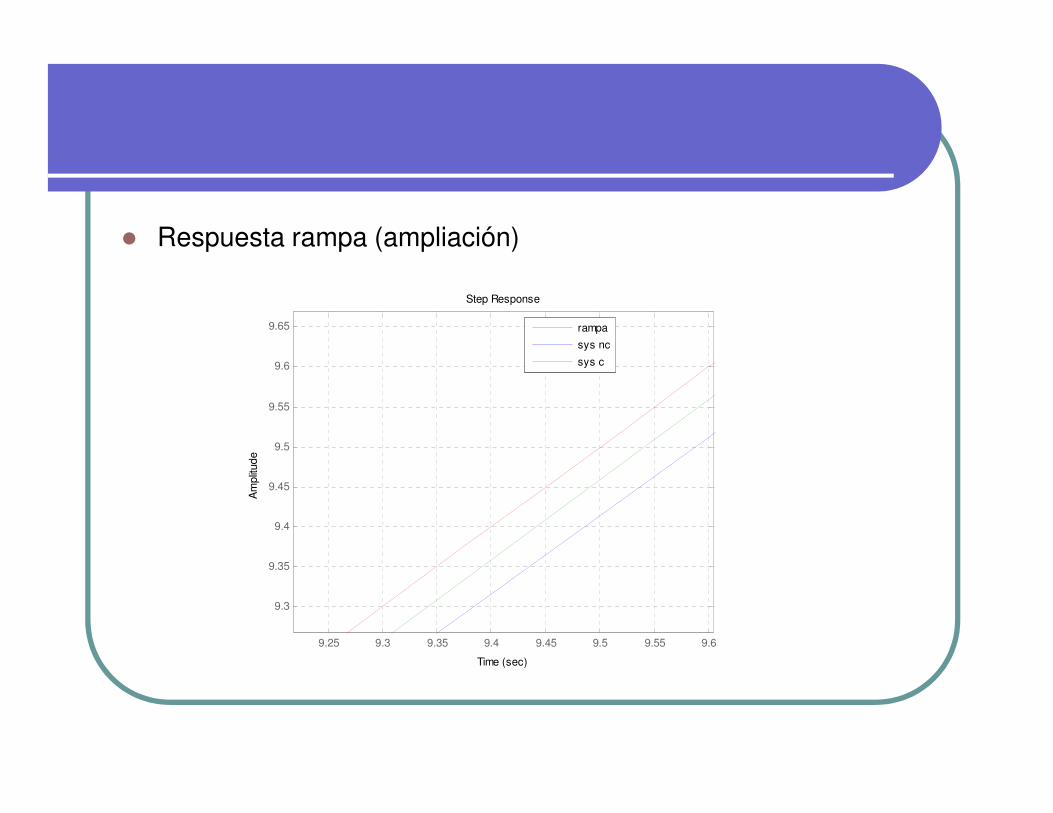
� Respuesta rampa (ampliación)
9.25 9.3 9.35 9.4 9.45 9.5 9.55 9.6
9.3
9.35
9.4
9.45
9.5
9.55
9.6
9.65
Step Response
Time (sec)
Am
plitu
de
rampa
sys nc
sys c
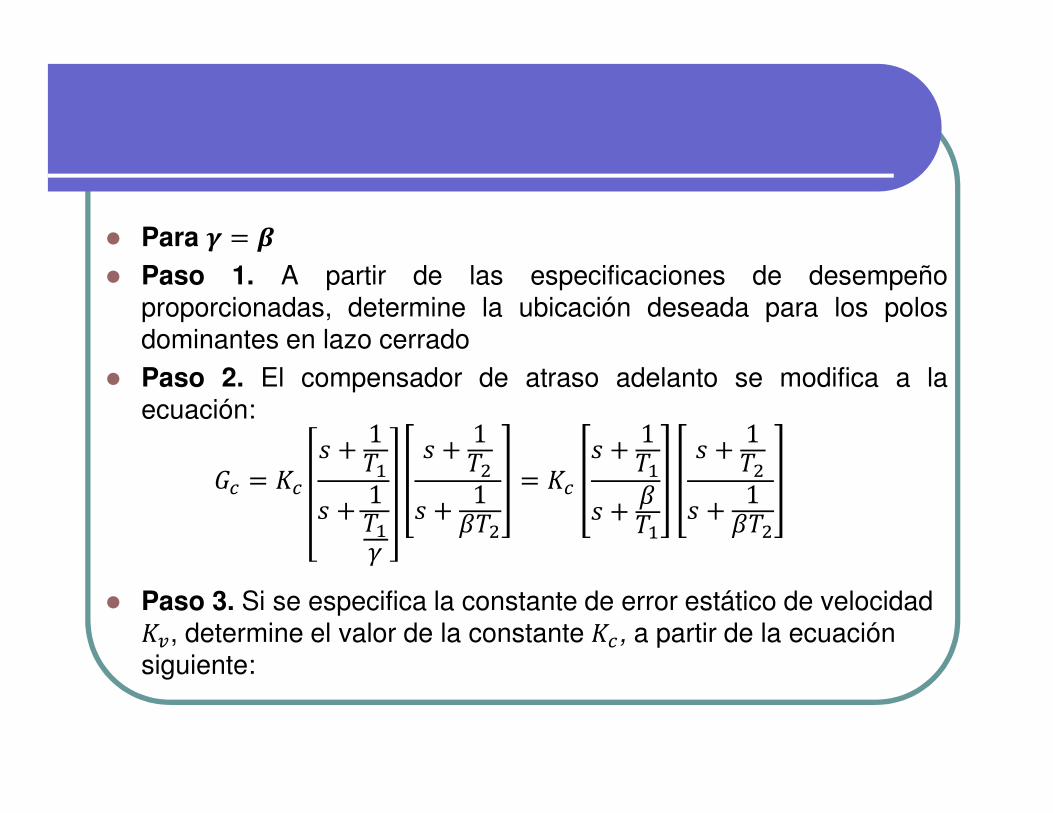
� Para � � �� Paso 1. A partir de las especificaciones de desempeño
proporcionadas, determine la ubicación deseada para los polosdominantes en lazo cerrado
� Paso 2. El compensador de atraso adelanto se modifica a laecuación:
� Paso 3. Si se especifica la constante de error estático de velocidad � , determine el valor de la constante ��, a partir de la ecuación siguiente:
�� � ��� � 1��� � 1���
� � 1��� � 1���
� ��� � 1��� � ���
� � 1��� � 1���
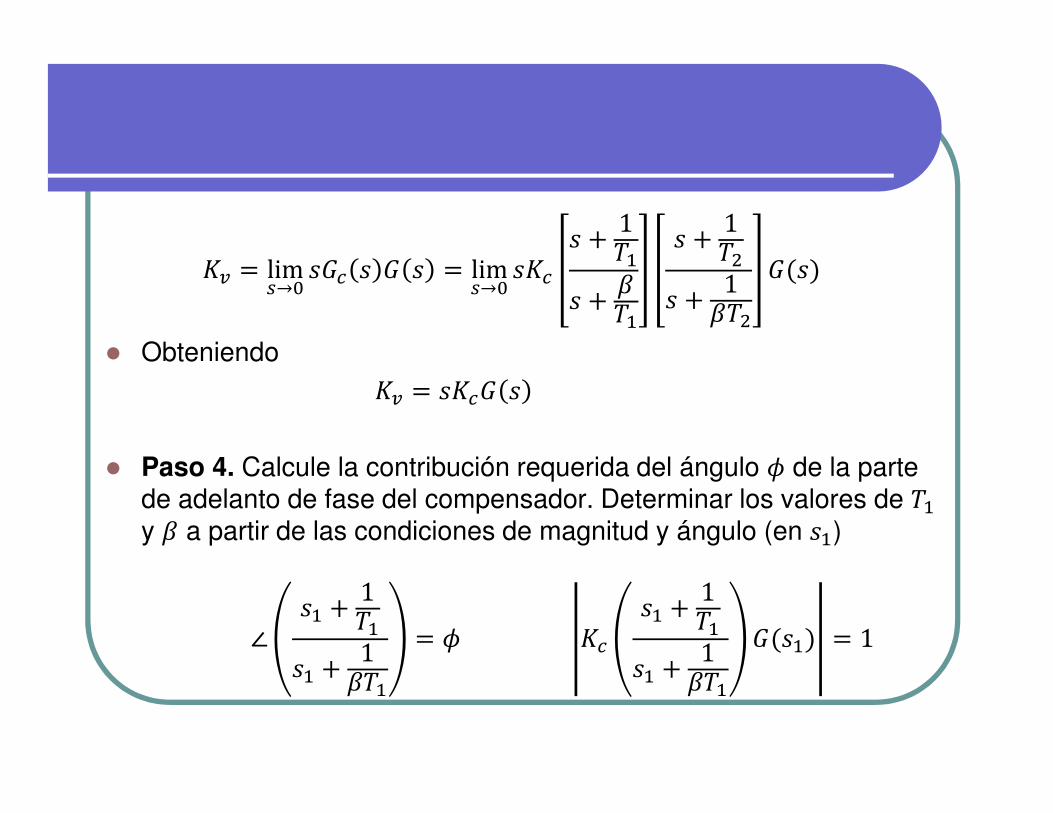
� Obteniendo
� Paso 4. Calcule la contribución requerida del ángulo � de la parte de adelanto de fase del compensador. Determinar los valores de ��y � a partir de las condiciones de magnitud y ángulo (en ��)
� � ���� �
∠ �� � 1���� � 1���
� � ���� � 1���� � 1���
����� � 1
� � lim$→� ��� � � � � lim$→� ���� � 1��� � ���
� � 1��� � 1���
����

� Paso 5. Usando el valor de � hallado, seleccionamos ��suficientemente grande, de modo cumpla con las siguientescondiciones
�� � 1���� � 1���
≈ 1 5° < ∠ �� � 1���� � 1���
< 0°
Ejemplo 4.2
� Considere el sistema de control la FT lazo abierto ����. Diseñe uncompensador atraso adelanto con � � � apropiado, para cumplirtodas las especificaciones de desempeño 2 � 0.5, 45 � 5'(*/�+& y� � 80�+&8�
� Solución� La función de transferencia de lazo abierto de acuerdo al ejemplo
es:
� La función de transferencia de lazo cerrado de sistema:
� � � 4��� � 0.5�
� � � 4��� � 0.5� �
4�� � 0.5�
� ����� �
����1 � ���� �
4��� � 0.5� � 4 �
4�� � 0.5� � 4
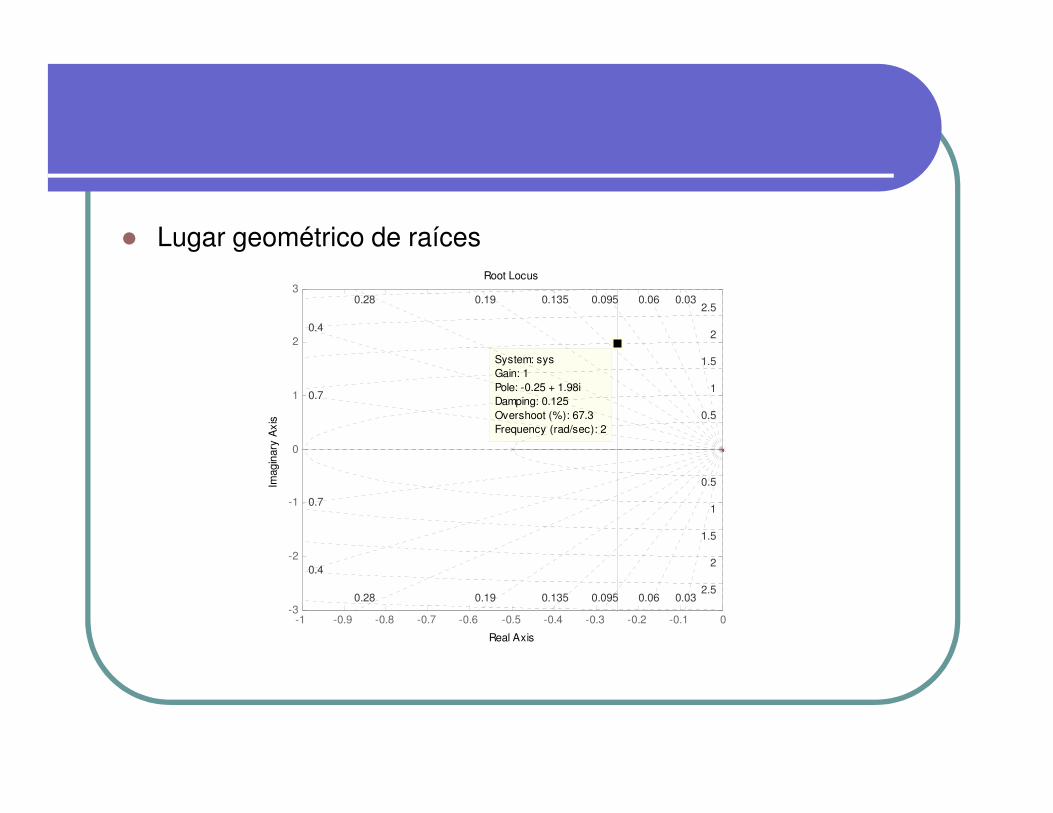
� Lugar geométrico de raícesRoot Locus
Real Axis
Imag
inar
y A
xis
-1 -0.9 -0.8 -0.7 -0.6 -0.5 -0.4 -0.3 -0.2 -0.1 0-3
-2
-1
0
1
2
3
0.7
0.030.060.0950.1350.190.28
0.4
0.7
0.5
1
1.5
2
2.5
0.5
1
1.5
2
2.5
3
System: sysGain: 1Pole: -0.25 + 1.98iDamping: 0.125Overshoot (%): 67.3Frequency (rad/sec): 2
0.030.060.0950.1350.190.28
0.4
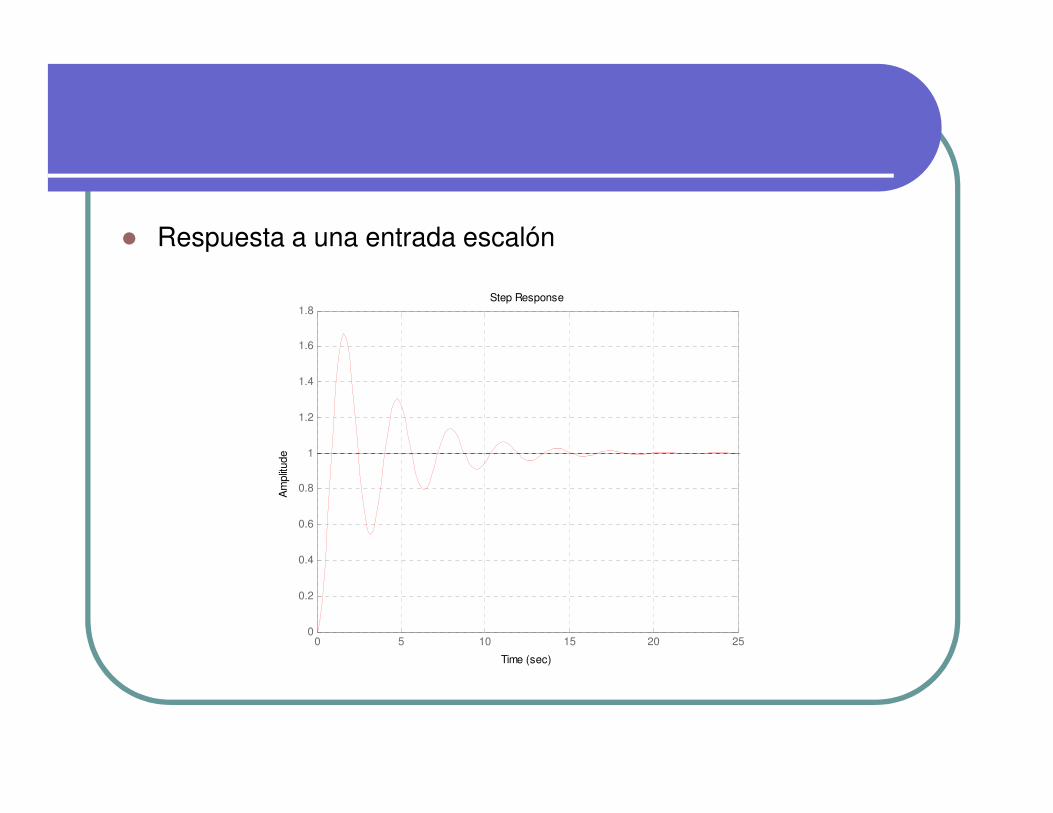
� Respuesta a una entrada escalón
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Step Response
Time (sec)
Am
plitu
de
� Respuesta a una entrada rampa
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10Step Response
Time (sec)
Am
plitu
de
� Parámetros
• 45 � 2'(*/�+&• 2 � 0.125• � � 8�+&8�
• 2 � 0.5• 45 � 5'(*/�+&
• � � 80�+&8�
sistema no compensado sistema compensado
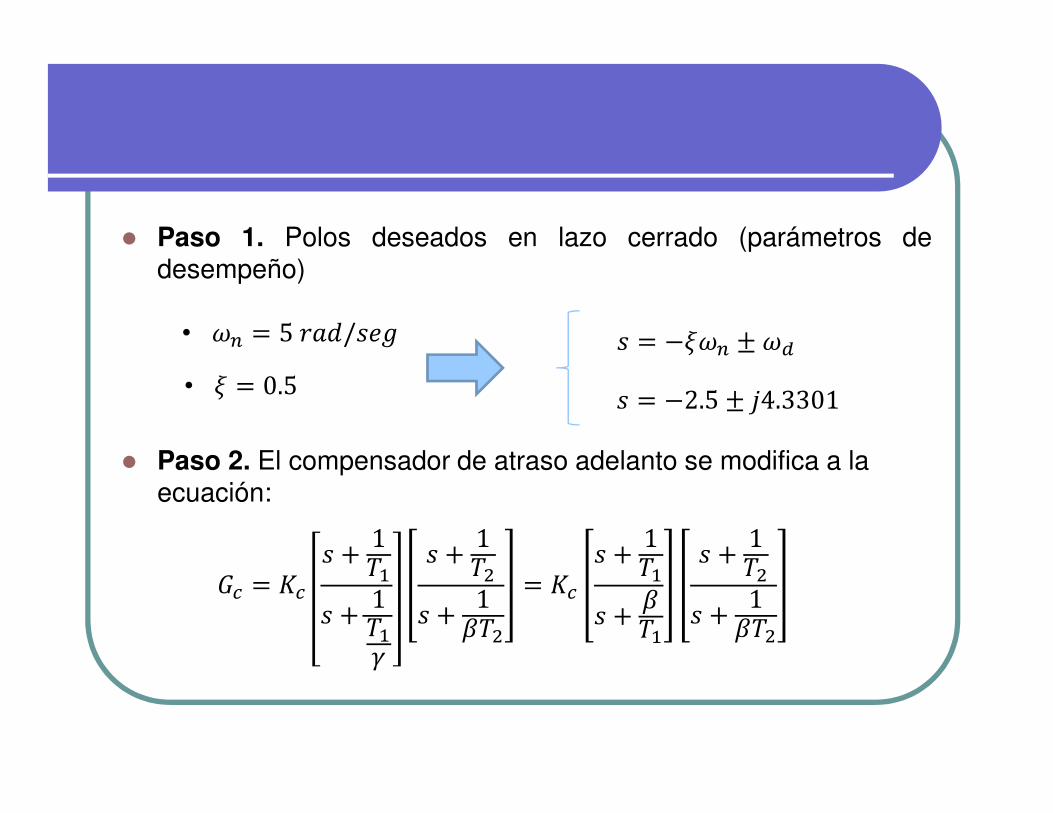
� Paso 1. Polos deseados en lazo cerrado (parámetros dedesempeño)
� Paso 2. El compensador de atraso adelanto se modifica a la ecuación:
• 2 � 0.5• 45 � 5'(*/�+& � � −245 ± 4?
� � −2.5 ± <4.3301
�� � ��� � 1��� � 1���
� � 1��� � 1���
� ��� � 1��� � ���
� � 1��� � 1���
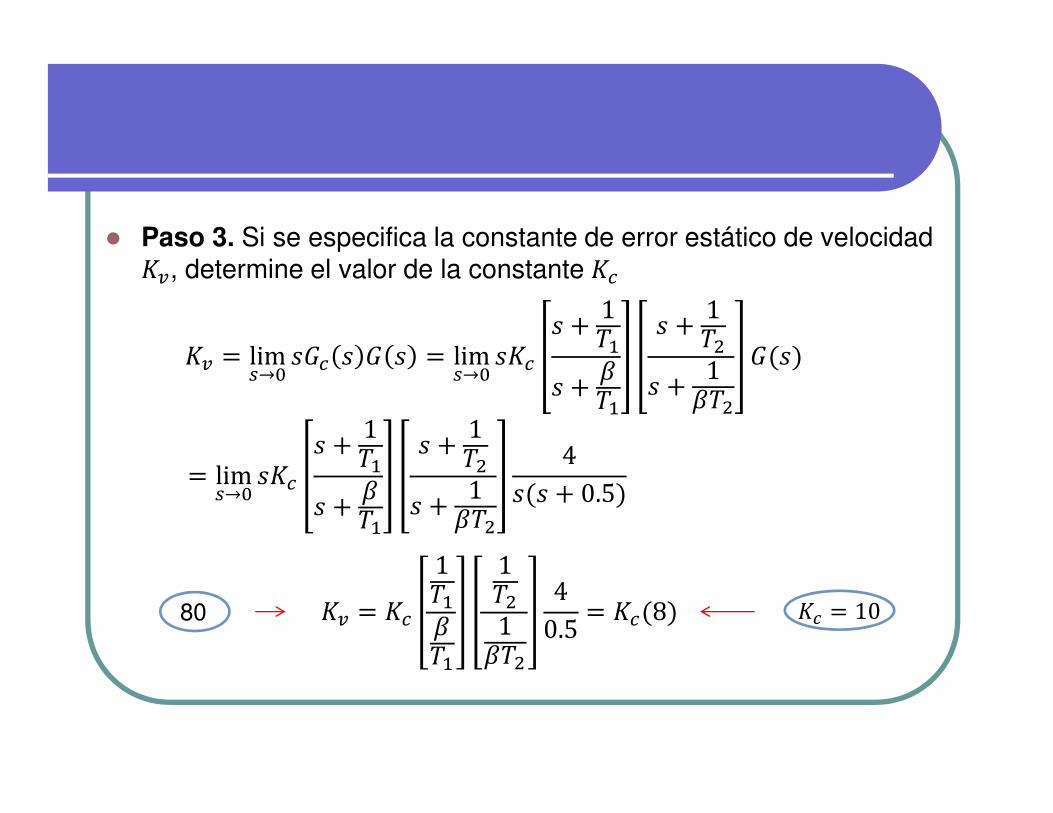
� Paso 3. Si se especifica la constante de error estático de velocidad � , determine el valor de la constante ��� � lim$→� ��� � � � � lim$→� ���
� � 1��� � ���
� � 1��� � 1���
����
� lim$→� ���� � 1��� � ���
� � 1��� � 1���
4��� � 0.5�
� � ��1�����
1��1���40.5 � ���8� �� � 1080
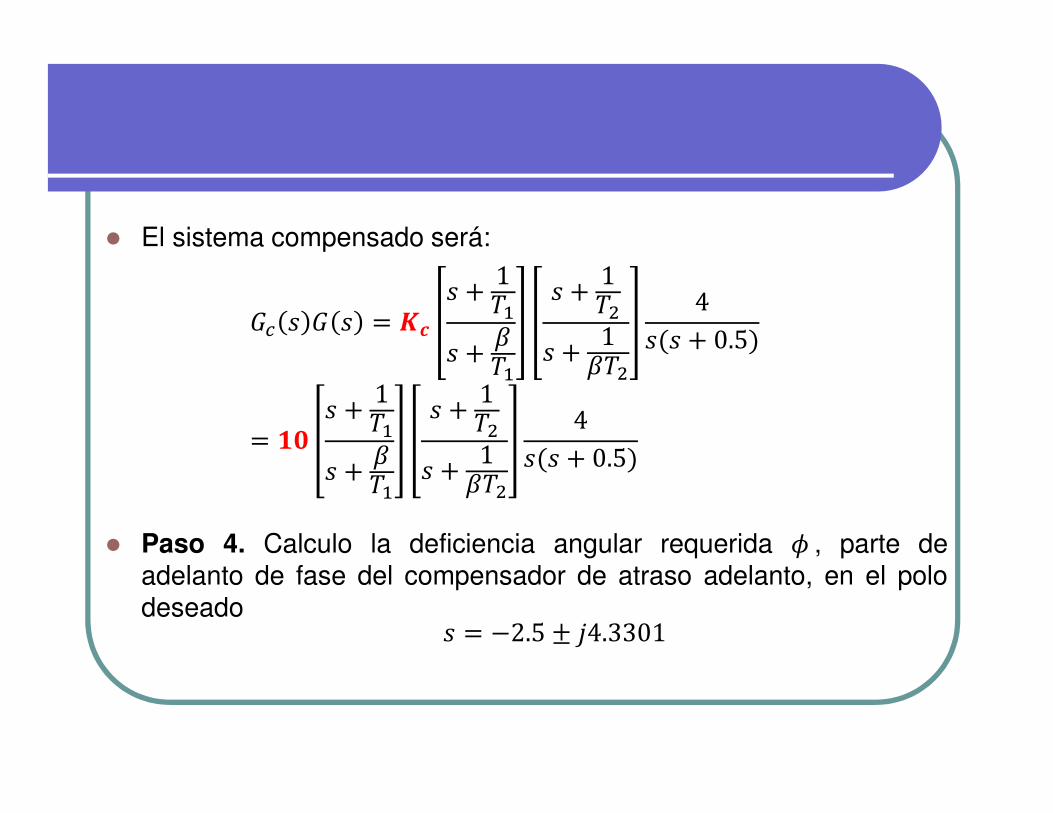
� El sistema compensado será:
� Paso 4. Calculo la deficiencia angular requerida � , parte deadelanto de fase del compensador de atraso adelanto, en el polodeseado
�� � � � � JK� � 1��� � ���
� � 1��� � 1���
4��� � 0.5�
� PQ � � 1��� � ���
� � 1��� � 1���
4��� � 0.5�
� � −2.5 ± <4.3301

� Calculo la deficiencia angular a partir de la FTLA al polo deseado
� A partir de la ecuación:
� La deficiencia angular:
∠ 4��� � 0.5�@$B8�.�±D.�� � ±180�2E � 1�
−120 − 114.7914� −234.7914 � ±180�2E � 1�
� � 234.7914 � 180 � 54.79
�� − �G � � � 54.79-3 -2.5 -2 -1.5 -1 -0.5 0
-5
-4
-3
-2
-1
0
1
2
3
4
5
0.050.110.170.240.340.46
0.62
0.84
1
2
3
4
1
2
3
4
5
0.050.110.170.240.340.46
0.62
0.84
Root Locus
Real Axis
Imag
inar
y A
xis
PD
-6 -5 -4 -3 -2 -1 0-5
-4
-3
-2
-1
0
1
2
3
4
50.120.220.340.480.60.74
0.88
0.96
0.120.220.340.480.60.74
0.88
0.96
123456
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
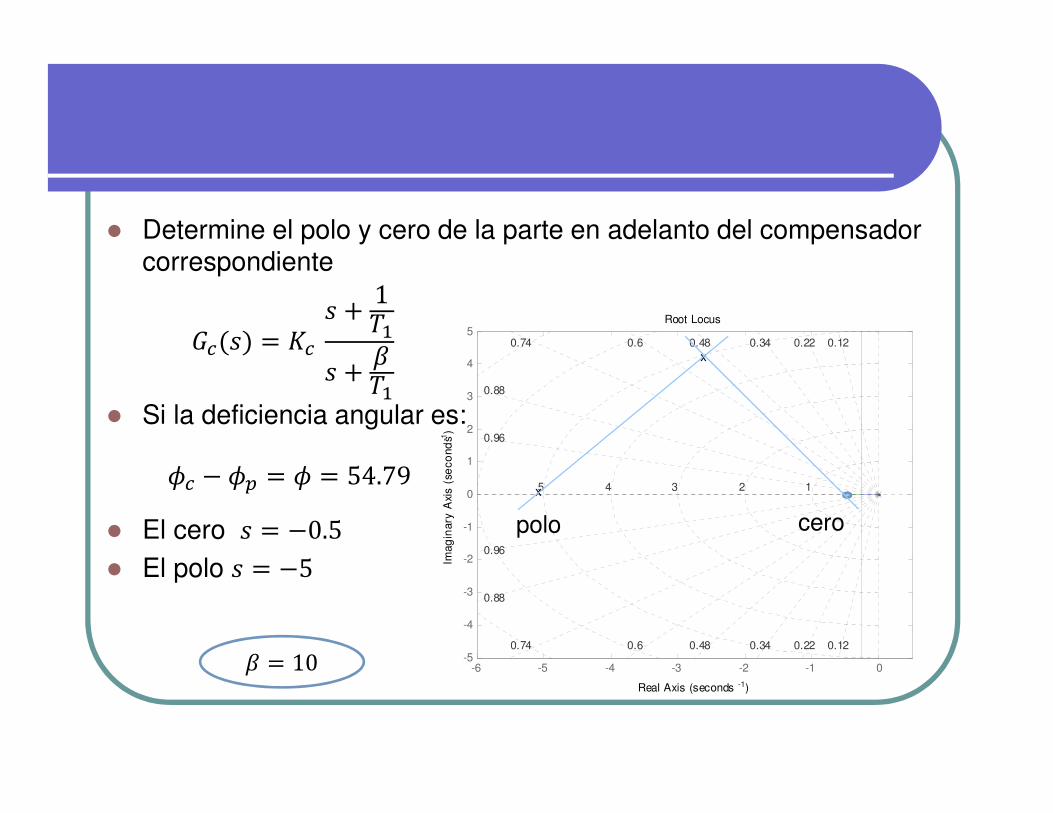
� Determine el polo y cero de la parte en adelanto del compensador correspondiente
� Si la deficiencia angular es:
� El cero � � −0.5� El polo � � −5
����� � ��� � 1��� � ���
�� − �G � � � 54.79
x
x
� � 10
polo cero

� El sistema compensado
� Sistema compensado solo con red adelanto
�� � � � � JK� � PRP� � �RP
� � 1��� � 1���
4� � � 0.5
� 10 � � 0.5� � 5
� � 1��� � 110��
4� � � 0.5
�� � � � � 40� � 20� � 5.5�� � 2.5�
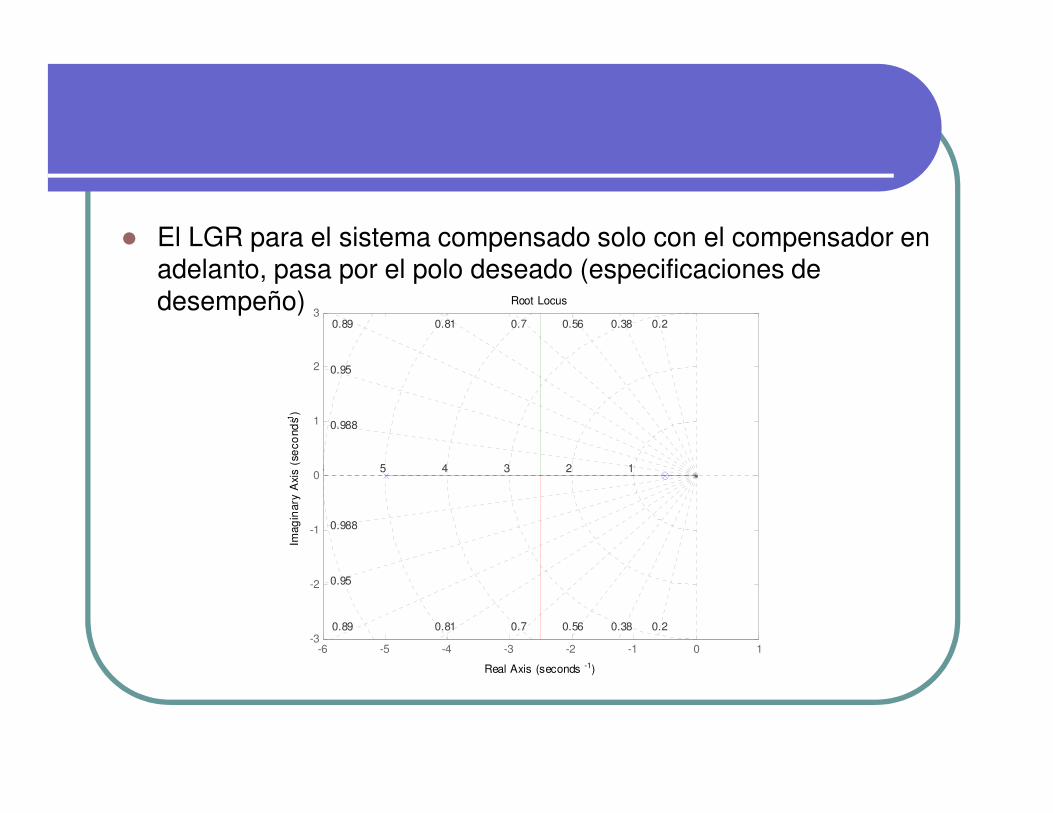
� El LGR para el sistema compensado solo con el compensador en adelanto, pasa por el polo deseado (especificaciones de desempeño)
-6 -5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
30.20.380.560.70.810.89
0.95
0.988
0.20.380.560.70.810.89
0.95
0.988
123456
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
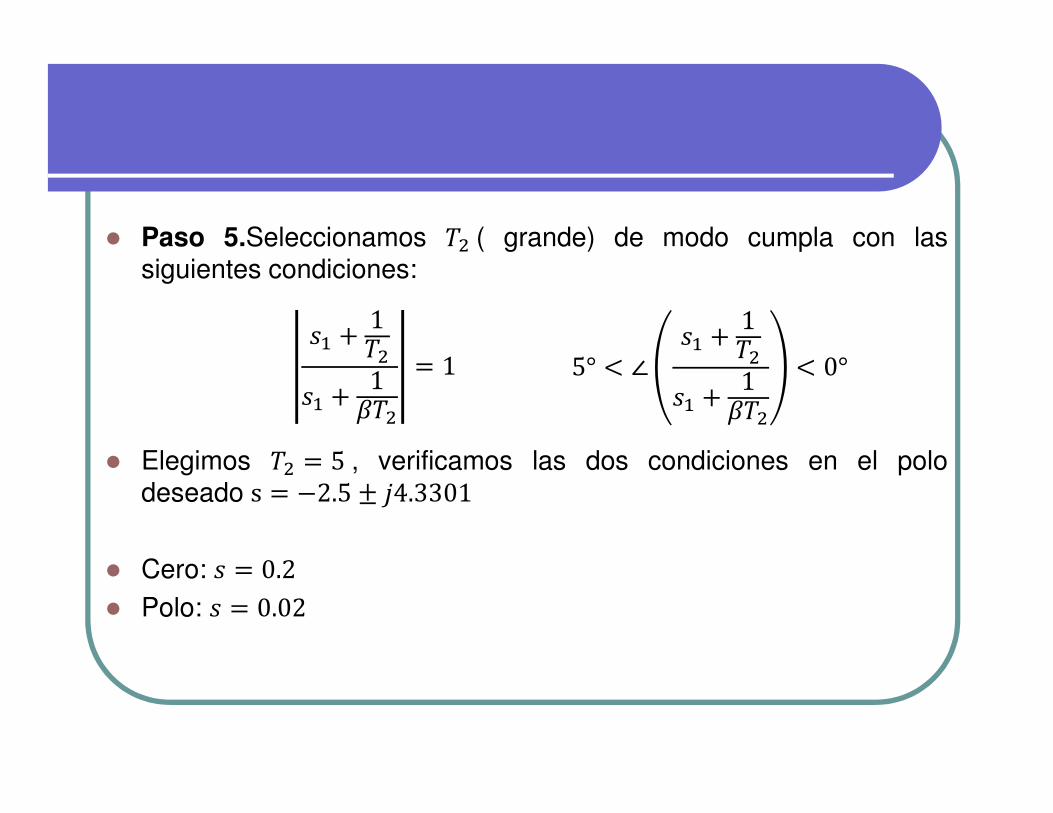
� Paso 5.Seleccionamos �� ( grande) de modo cumpla con lassiguientes condiciones:
� Elegimos �� � 5 , verificamos las dos condiciones en el polodeseado s � −2.5 ± <4.3301
� Cero: � � 0.2� Polo: � � 0.02
�� � 1���� � 1���
� 1 5° < ∠ �� � 1���� � 1���
< 0°

� Magnitud
� Angulo
�� � 1���� � 1��� $�B8�.�CD.��
� � � 0.2� � 0.02 8�.�CD.��
� 0.98 ≅ 1
∠ −2.5 � <4.3301 � 0.2−2.5 � <4.3301 � 0.02
� −N()8� 4.33012.3 �N()8� 4.3301
2.48
−5° < �� �1��
�� � 1���< 0°
� −62.0243 � 60.1240 � −6.30°
� El compensador tendrá la función de transferencia en lazo abierto
�� � � � � ��� � 1��� � ���
� � 1��� � 1���
4� � � 0.5
� 10 � � 0.5� � 5
�� � 0.2��� � 0.02�
4� � � 0.5 � 40� � 8
� � 5.02�� � 0.1�
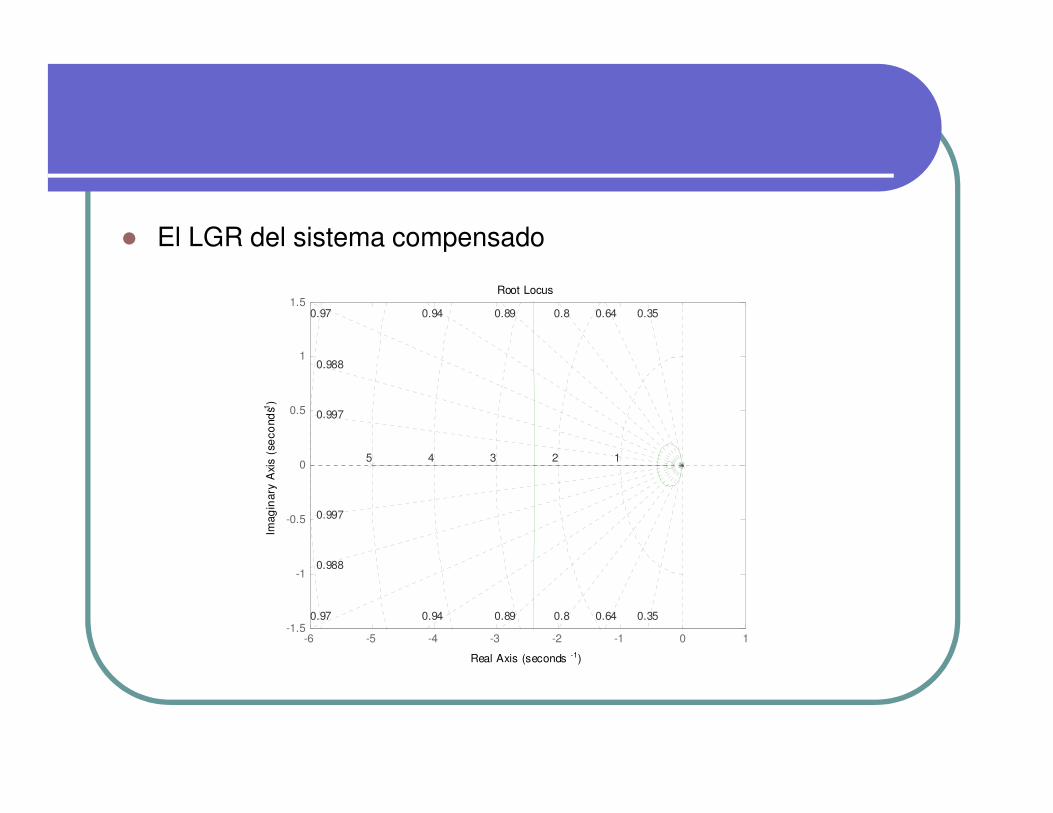
� El LGR del sistema compensado
-6 -5 -4 -3 -2 -1 0 1-1.5
-1
-0.5
0
0.5
1
1.50.350.640.80.890.940.97
0.988
0.997
0.350.640.80.890.940.97
0.988
0.997
123456
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
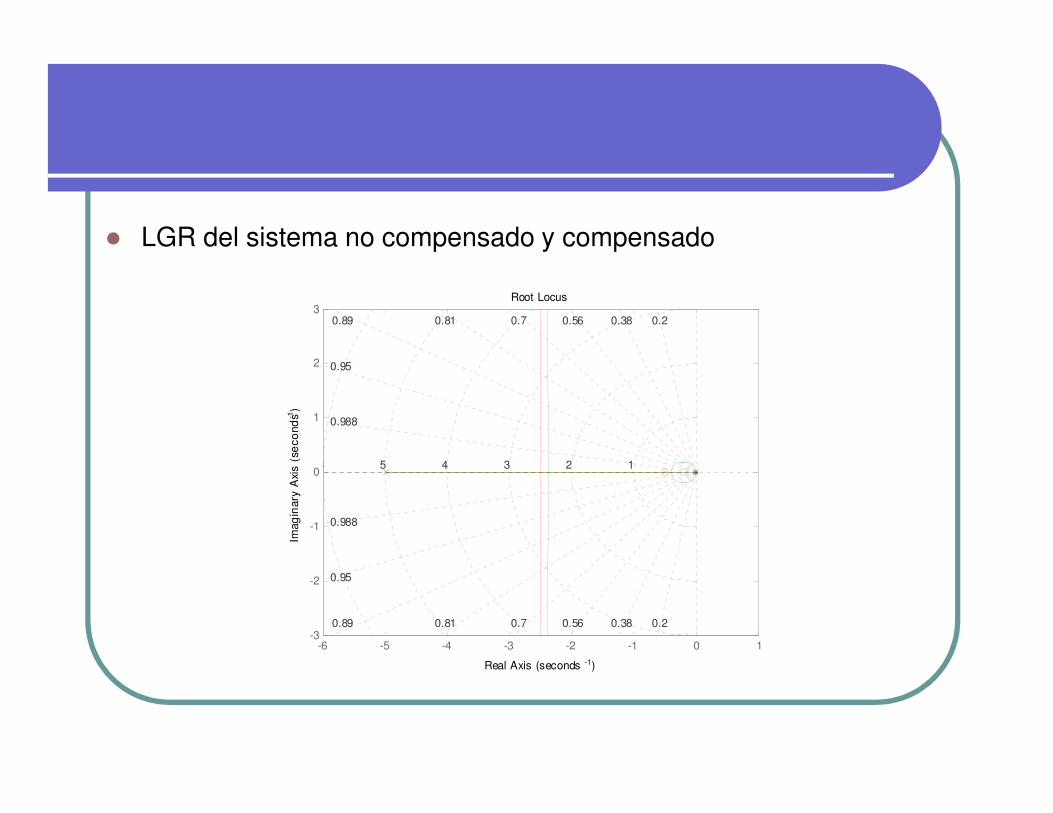
� LGR del sistema no compensado y compensado
-6 -5 -4 -3 -2 -1 0 1-3
-2
-1
0
1
2
30.20.380.560.70.810.89
0.95
0.988
0.20.380.560.70.810.89
0.95
0.988
123456
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
� La FT de lazo cerrado
�� � � �1 � �� � � � �
40� � 8� � 5.02�� � 0.1�1 � 40� � 8� � 5.02�� � 0.1�
� 40� � 8� � 5.02�� � 40.1� � 8
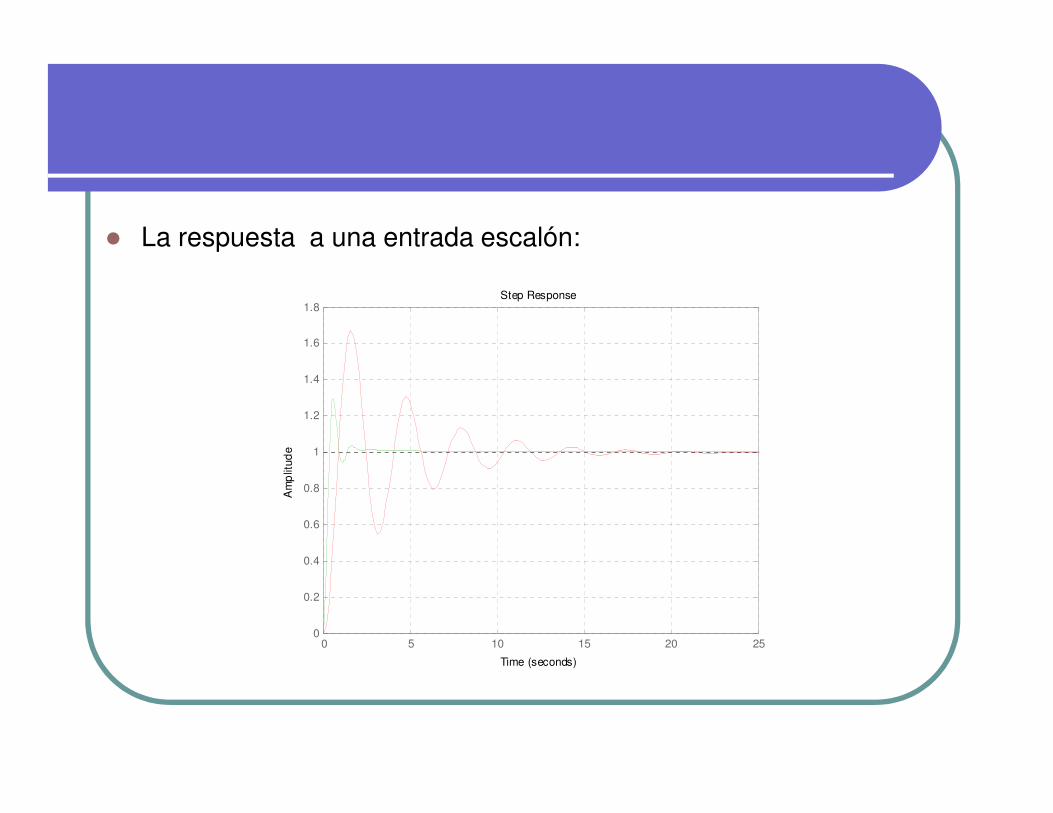
� La respuesta a una entrada escalón:
0 5 10 15 20 250
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8Step Response
Time (seconds)
Am
plit
ude
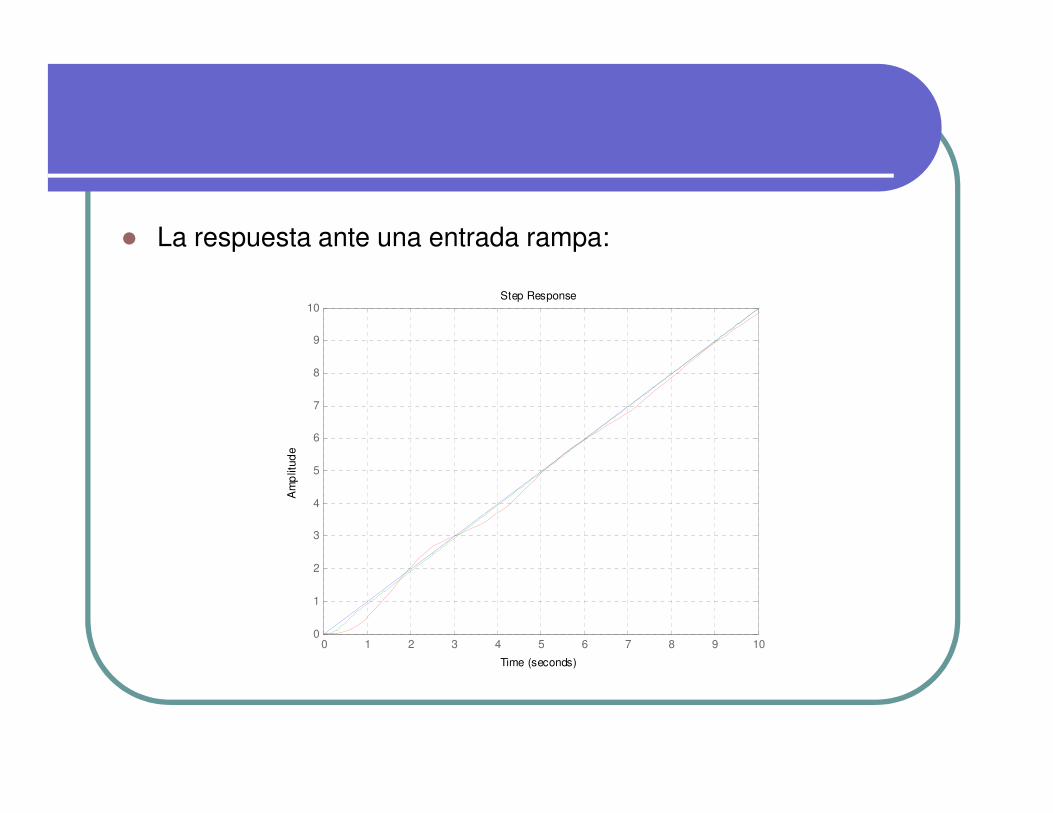
� La respuesta ante una entrada rampa:
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10Step Response
Time (seconds)
Am
plit
ude
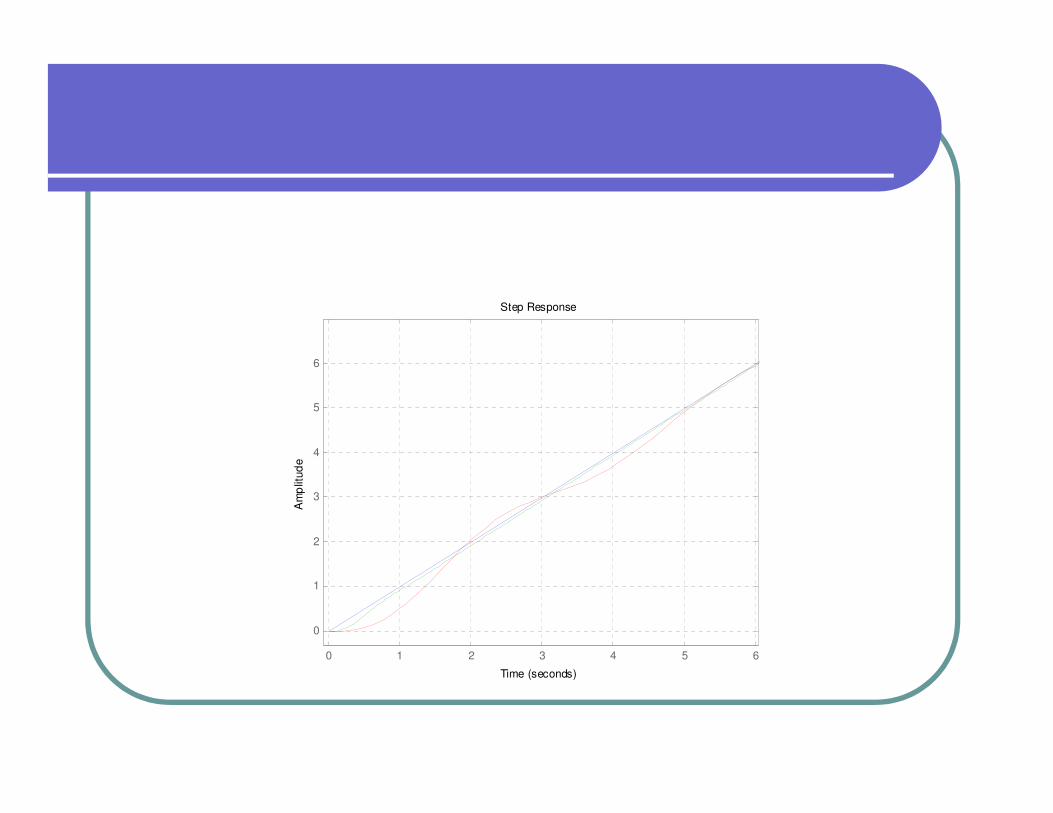
0 1 2 3 4 5 6
0
1
2
3
4
5
6
Step Response
Time (seconds)
Am
plit
ude
Ejemplo 4.3
� Considere el sistema de control la FT lazo abierto ����. Diseñe uncompensador atraso adelanto con � � � apropiado, para cumplirtodas las especificaciones de desempeño � � −2 ± <3.46 y � �50�+&8�
� Solución� La función de transferencia de lazo abierto de acuerdo al ejemplo
es:
� � � 10��� � 2��� � 5�
� � � 10��� � 2��� � 5� �
10� � 7�� � 10�
� ����� �
����1 � ���� �
10� � 7�� � 10�1 � 10� � 7�� � 10�
� 10� � 7�� � 10� � 10

� La grafica del LGR
-6 -5 -4 -3 -2 -1 0 1 2 3 4 5-5
-4
-3
-2
-1
0
1
2
3
4
50.180.360.540.68
0.8
0.88
0.95
0.985
0.180.360.540.680.8
0.88
0.95
0.985
123456
Root Locus
Real Axis
Imag
inar
y A
xis
LGR sys nc
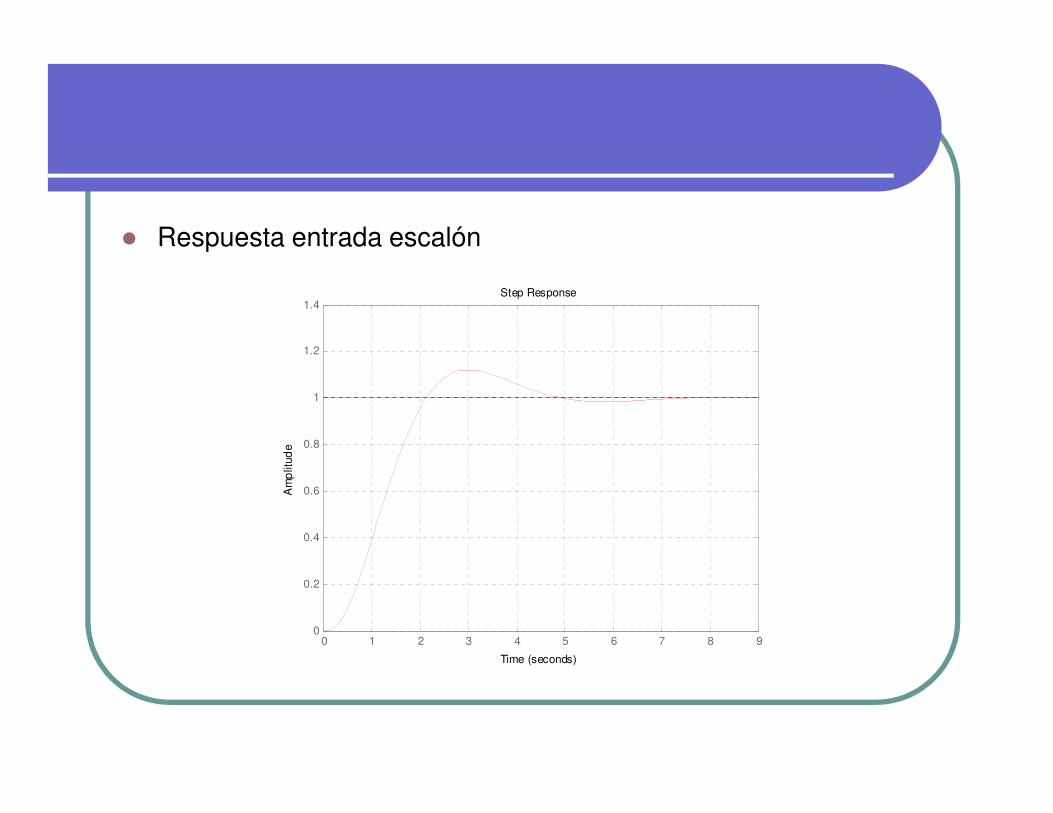
� Respuesta entrada escalón
0 1 2 3 4 5 6 7 8 90
0.2
0.4
0.6
0.8
1
1.2
1.4Step Response
Time (seconds)
Am
plit
ude
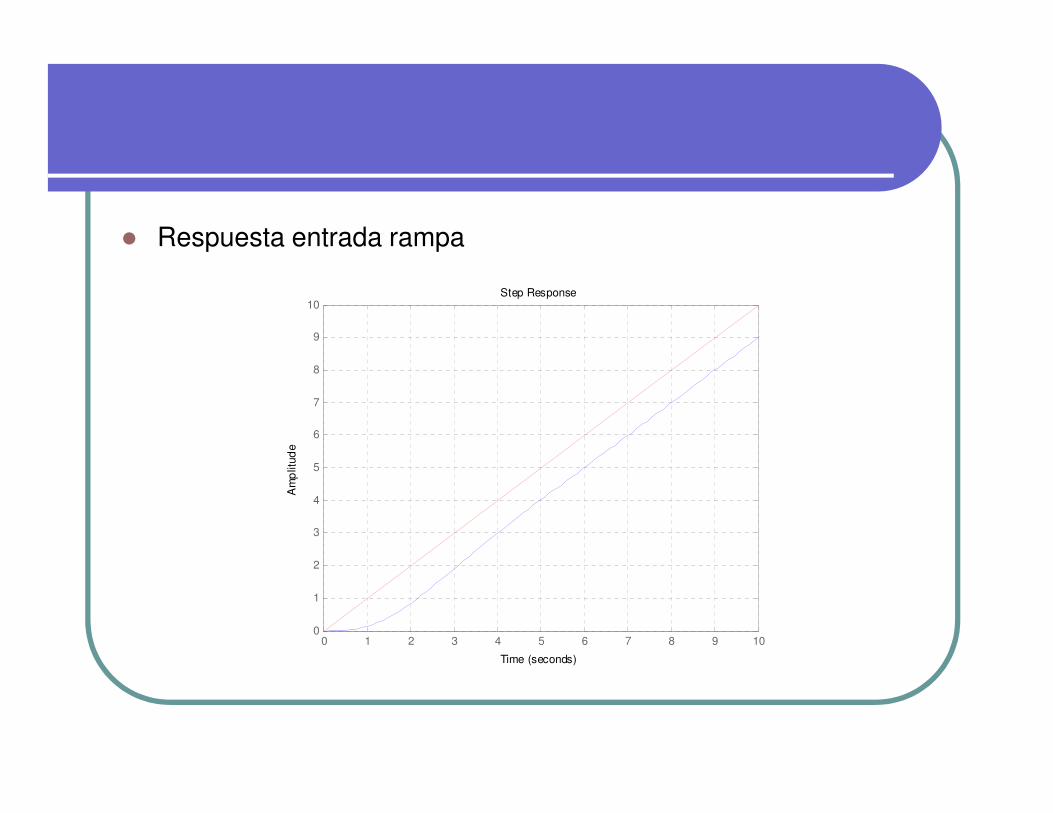
� Respuesta entrada rampa
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10Step Response
Time (seconds)
Am
plit
ude

� La función de transferencia de lazo cerrado de sistema:
� Polos dominantes de lazo cerrado:
� De la ecuación
� La constante de error estático de velocidad es hallada:
� ����� �
����1 � ���� �
10� � 7�� � 10�1 � 10� � 7�� � 10�
� 10� � 7�� � 10� � 10
� � −0.74 ± <1.12
� � −245 ± 45 1 − 2�45 � 1.34'(*/�+&2 � 0.55
� � lim$→� ����� � lim$→� �10
��� � 2��� � 5� �1010 � � 1�+&8�

� De las especificaciones, se determina
� Los parámetros de los sistemas
� Paso 1. A partir de las especificaciones de desempeñoproporcionadas, determinamos la ubicación deseada
2 � 0.5545 � 1.34'(*/�+&� � 1�+&8�2 � 0.545 � 4'(*/�+&� � 50�+&8�
No compensado Compensado
Los polos deseados � � −2 ± <3.46 Dato
� � −245 ± 45 1 − 2�45 � 4'(*/�+&2 � 0.5
� � −2 ± <3.46
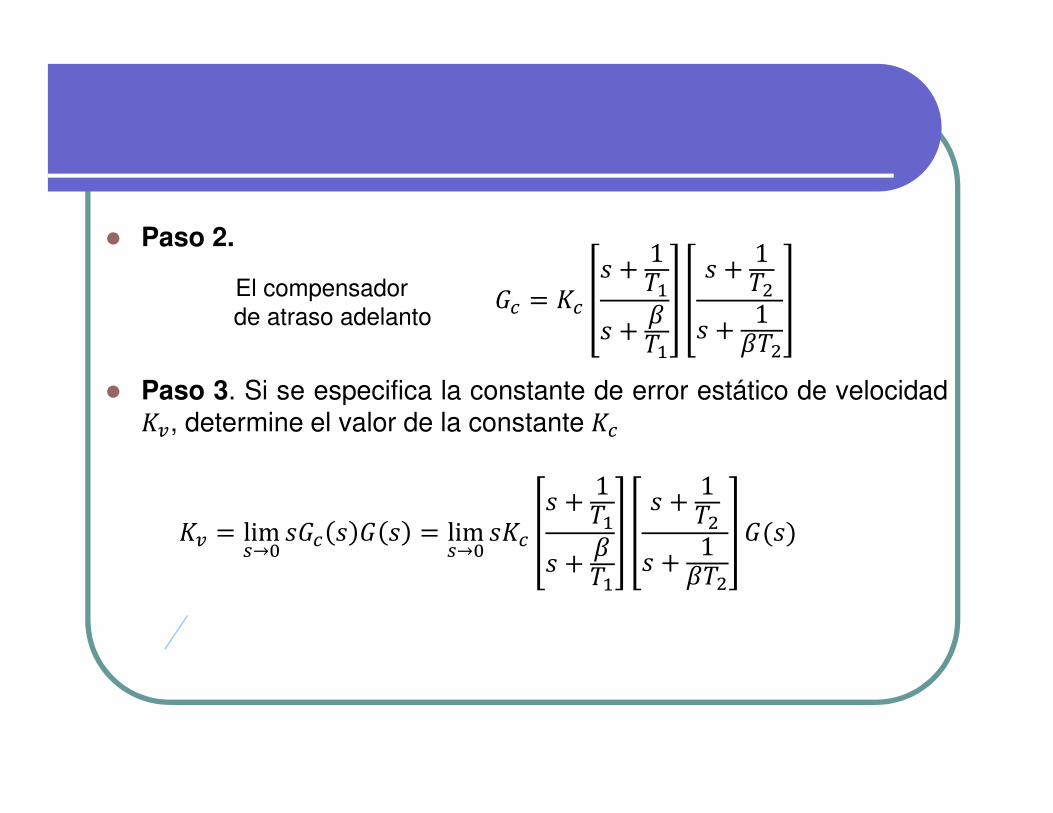
� Paso 2.
� Paso 3. Si se especifica la constante de error estático de velocidad� , determine el valor de la constante ��
�� � ��� � 1��� � ���
� � 1��� � 1���
� � lim$→� ��� � � � � lim$→� ���� � 1��� � ���
� � 1��� � 1���
����
El compensadorde atraso adelanto
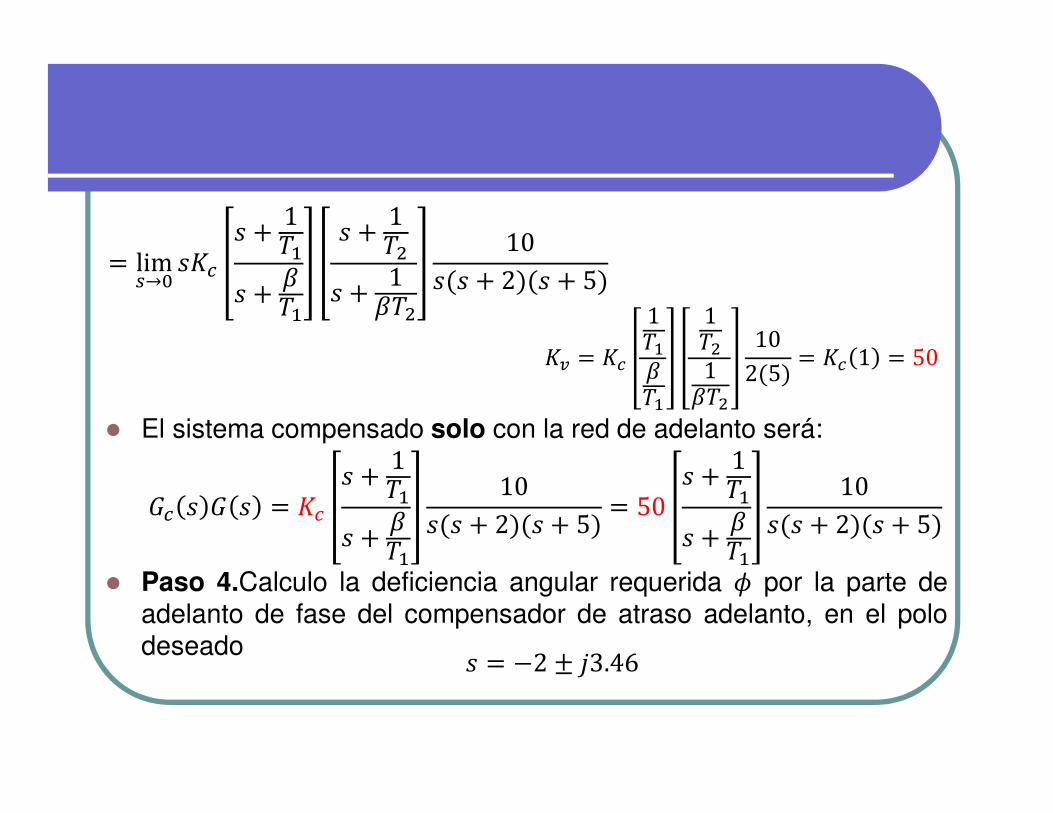
� El sistema compensado solo con la red de adelanto será:
� Paso 4.Calculo la deficiencia angular requerida � por la parte deadelanto de fase del compensador de atraso adelanto, en el polodeseado
�� � � � � ��� � 1��� � ���
10��� � 2��� � 5� � 50 � � 1��
� � ���10
��� � 2��� � 5�
� � −2 ± <3.46
� lim$→� ���� � 1��� � ���
� � 1��� � 1���
10��� � 2��� � 5�
� � ��1�����
1��1���102�5� � �� 1 � 50
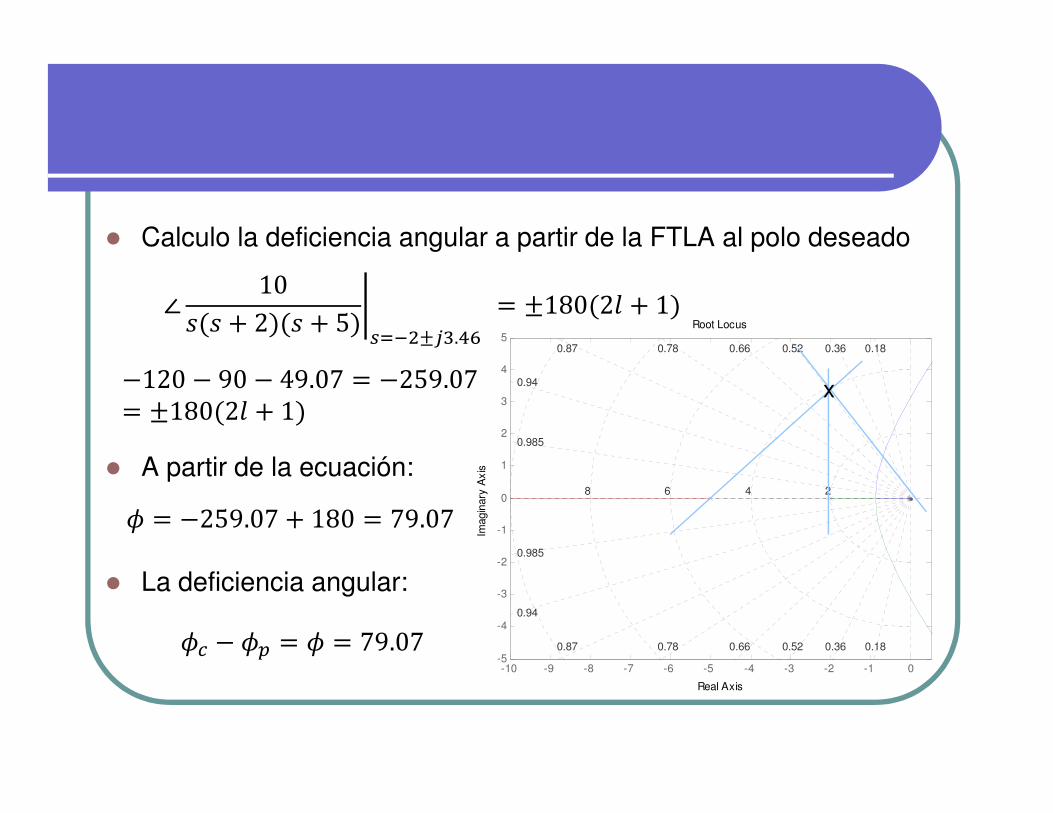
� Calculo la deficiencia angular a partir de la FTLA al polo deseado
� A partir de la ecuación:
� La deficiencia angular:
∠ 10��� � 2��� � 5�@$B8�±D.� � ±180�2E � 1�
−120 − 90 − 49.07 � −259.07� ±180�2E � 1�
� � −259.07 � 180 � 79.07
�� − �G � � � 79.07-10 -9 -8 -7 -6 -5 -4 -3 -2 -1 0
-5
-4
-3
-2
-1
0
1
2
3
4
50.180.360.520.660.780.87
0.94
0.985
0.180.360.520.660.780.87
0.94
0.985
2468
Root Locus
Real Axis
Imag
inar
y A
xis
x
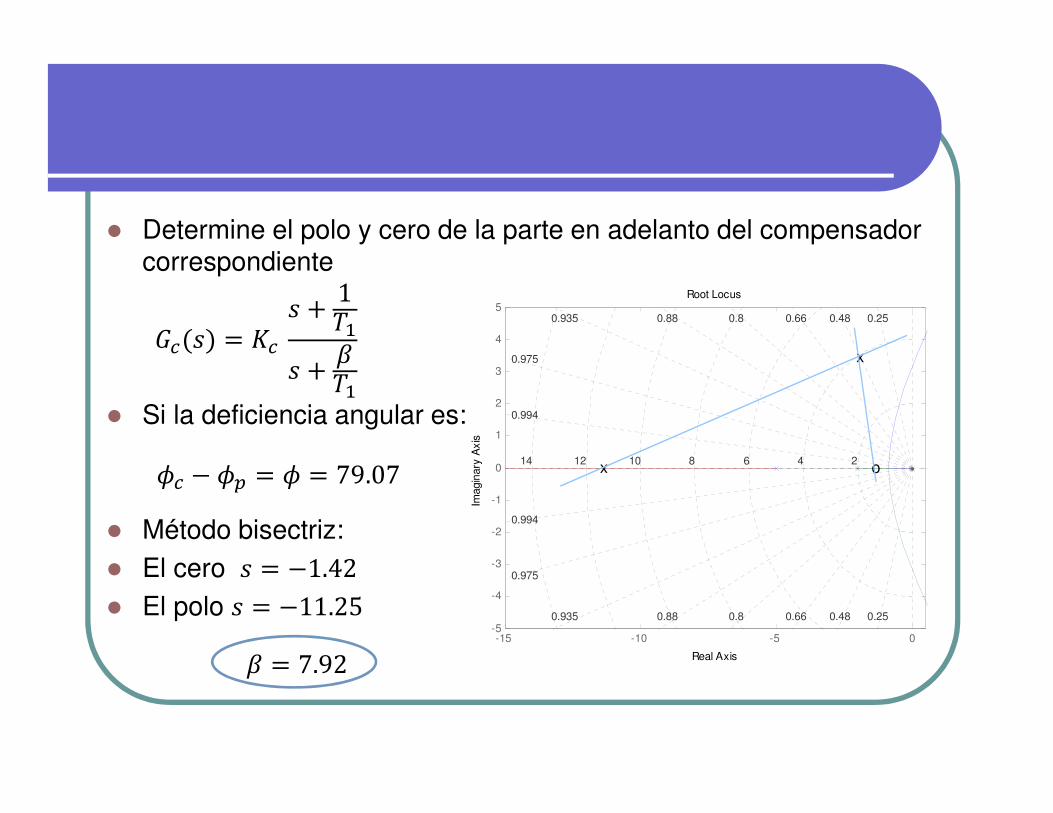
� Determine el polo y cero de la parte en adelanto del compensador correspondiente
� Si la deficiencia angular es:
� Método bisectriz:
� El cero � � −1.42� El polo � � −11.25
����� � ��� � 1��� � ���
�� − �G � � � 79.07
� � 7.92 -15 -10 -5 0-5
-4
-3
-2
-1
0
1
2
3
4
5
0.975
0.994
0.250.480.660.80.880.935
0.975
0.994
2468101214
0.250.480.660.80.880.935
Root Locus
Real Axis
Imag
inar
y A
xis
x
ox
� El sistema compensado solo con la red de adelanto
�� � � � � ��� � 1��� � ���
10��� � 2��� � 5�
� 50 � � 1.42� � 11.25
10��� � 2��� � 5�
� 500� � 710� � 18.25� � 88.75�� � 112.50�
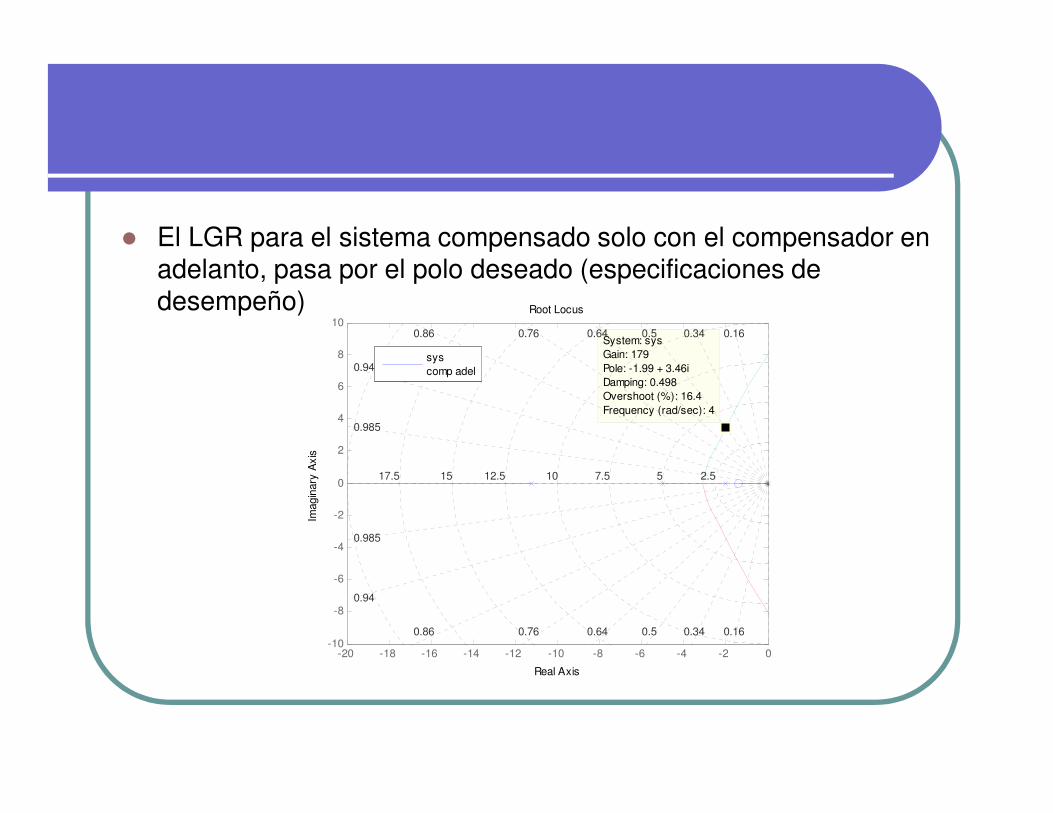
� El LGR para el sistema compensado solo con el compensador en adelanto, pasa por el polo deseado (especificaciones de desempeño) Root Locus
Real Axis
Imag
inar
y A
xis
-20 -18 -16 -14 -12 -10 -8 -6 -4 -2 0-10
-8
-6
-4
-2
0
2
4
6
8
10
System: sysGain: 179Pole: -1.99 + 3.46iDamping: 0.498Overshoot (%): 16.4Frequency (rad/sec): 4
0.160.340.50.640.760.86
0.94
0.985
0.160.340.50.640.760.86
0.94
0.985
2.557.51012.51517.5
syscomp adel
� Paso 5.Seleccionamos ��( grande) de modo cumpla con las siguientes condiciones:
� Elegimos �� � 10, verificamos las dos condiciones en el polo deseado s � −2 ± <3.46
� Polo: � � 0.1� Cero: � � 0.0123
�� � 1���� � 1���
� 1 5° < ∠ �� � 1���� � 1���
< 0°

� Magnitud
� Angulo
�� � 1���� � 1��� $�B8�±D.�
� � � 0.1� � 0.0123 8�±D.�
≅ 1
∠ −2 � <3.46 � 0.1−2 � <3.46 � 0.0123 � −N()8� 3.46
1.9 �N()8� 3.461.98
−5° < �� �1��
�� � 1���< 0°
� −61.22 � 60.21 � −1.01°
� El compensador tendrá la función de transferencia en lazo abierto
�� � � � � ��� � 1��� � ���
� � 1��� � 1���
4� � � 0.5
� 50 � � 1.42� � 11.25
�� � 0.1��� � 0.0123�
10��� � 2��� � 5�
� 500 �� � 1.52� � 0.14�� � 18.26� � 88.97� � 113.59�� � 1.38�
� 500�� � 760� � 70�� � 18.26� � 88.97� � 113.59�� � 1.38�

� El LGR del sistema compensado es
-5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
50.540.68
0.84
0.95
0.090.20.30.420.540.68
0.84
0.95
12345
0.090.20.30.42
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
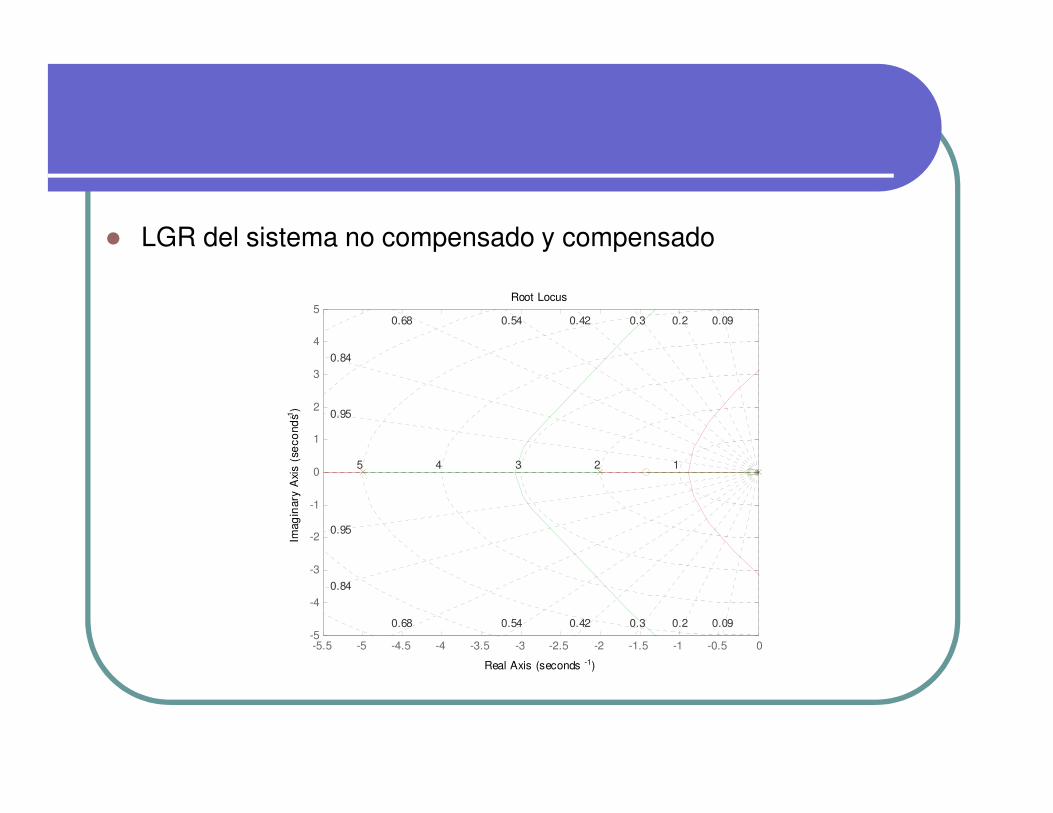
� LGR del sistema no compensado y compensado
-5.5 -5 -4.5 -4 -3.5 -3 -2.5 -2 -1.5 -1 -0.5 0-5
-4
-3
-2
-1
0
1
2
3
4
50.20.30.420.540.68
0.84
0.95
0.090.20.30.420.540.68
0.84
0.95
12345
0.09
Root Locus
Real Axis (seconds -1)
Imag
inar
y A
xis
(se
cond
s-1)
� La FT de lazo cerrado
�� � � �1 � �� � � � �� 500�� � 760� � 71�� � 18.26� � 88.99� � 613.65�� � 761.46� � 71

� La respuesta a una entrada escalón:
0 1 2 3 4 5 6 7 8 90
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6Step Response
Time (seconds)
Am
plit
ude

� La respuesta ante una entrada rampa:
0 1 2 3 4 5 6 7 8 9 100
1
2
3
4
5
6
7
8
9
10Step Response
Time (seconds)
Am
plit
ude
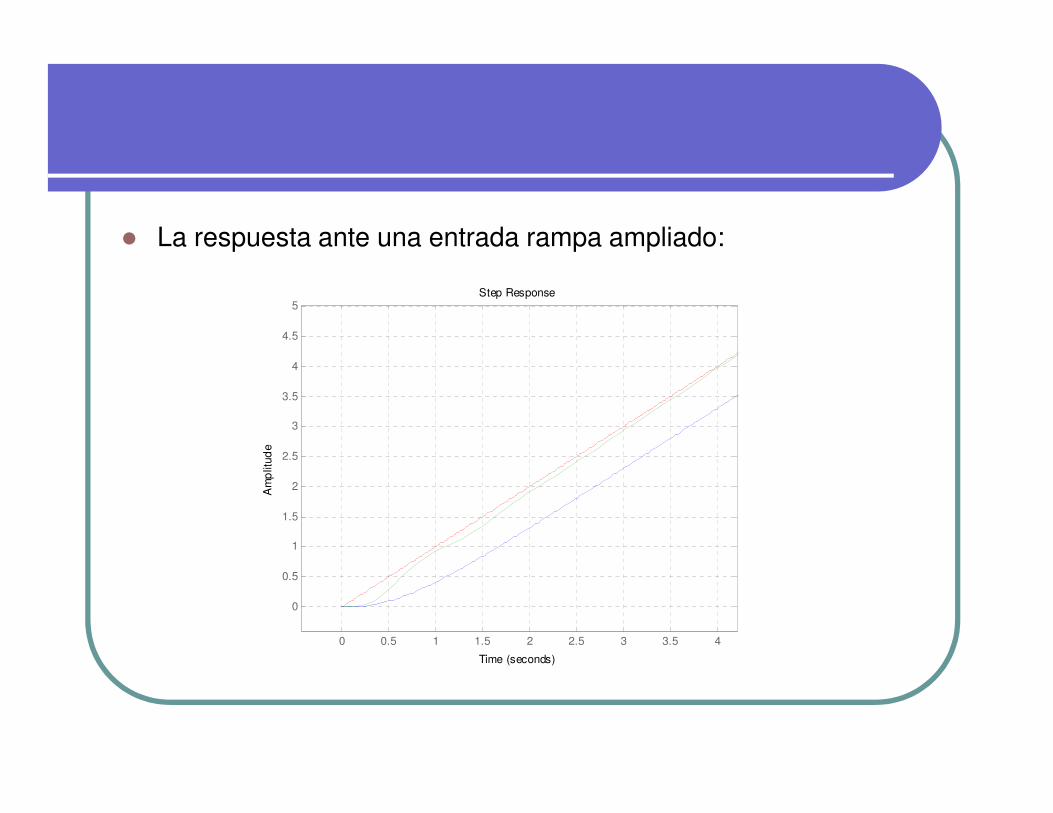
� La respuesta ante una entrada rampa ampliado:
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5Step Response
Time (seconds)
Am
plit
ude

Ejemplo 4.4
� …