COMPORTAMIENTO DINÁMICO DE UNA … · Comportamiento diná mico de una embarcació n pesquera en...
16
COMPORTAMIENTO DINÁMICO DE UNA EMBARCACIÓN PESQUERA EN EL MAR PERUANO Anwar Julio Yarín Achachagua Yasser Hipólito Yarín Achachagua Mierwen Palacios Aranda
Transcript of COMPORTAMIENTO DINÁMICO DE UNA … · Comportamiento diná mico de una embarcació n pesquera en...

COMPORTAMIENTO DINÁMICO
DE UNA EMBARCACIÓN PESQUERA
EN EL MAR PERUANO Anwar Julio Yarín Achachagua
Yasser Hipólito Yarín AchachaguaMierwen Palacios Aranda

COMPORTAMIENTO DINÁMICO
DE UNA EMBARCACIÓN PESQUERA
EN EL MAR PERUANO
Primera edición digital
Julio, 2011
Lima - Perú
© Anwar Julio Yarín Achachagua
Yasser Hipólito Yarín Achachagua
Mierwen Palacios Aranda
PROYECTO LIBRO DIGITAL
PLD 0134
Editor: Víctor López Guzmán
http://www.guzlop-editoras.com/[email protected] [email protected] facebook.com/guzlop twitter.com/guzlopster428 4071 - 999 921 348Lima - Perú

PROYECTO LIBRO DIGITAL (PLD)
El proyecto libro digital propone que los apuntes de clases, las tesis y los avances en investigación (papers) de las profesoras y profesores de las universidades peruanas sean convertidos en libro digital y difundidos por internet en forma gratuita a través de nuestra página web. Los recursos económicos disponibles para este proyecto provienen de las utilidades nuestras por los trabajos de edición y publicación a terceros, por lo tanto, son limitados.
Un libro digital, también conocido como e-book, eBook, ecolibro o libro electrónico, es una versión electrónica de la digitalización y diagramación de un libro que originariamente es editado para ser impreso en papel y que puede encontrarse en internet o en CD-ROM. Por, lo tanto, no reemplaza al libro impreso.
Entre las ventajas del libro digital se tienen:• su accesibilidad (se puede leer en cualquier parte que tenga electricidad),• su difusión globalizada (mediante internet nos da una gran independencia geográfica),• su incorporación a la carrera tecnológica y la posibilidad de disminuir la brecha digital (inseparable de la competición por la influencia cultural),• su aprovechamiento a los cambios de hábitos de los estudiantes asociados al internet y a las redes sociales (siendo la oportunidad de difundir, de una forma diferente, el conocimiento),• su realización permitirá disminuir o anular la percepción de nuestras élites políticas frente a la supuesta incompetencia de nuestras profesoras y profesores de producir libros, ponencias y trabajos de investiga-ción de alta calidad en los contenidos, y, que su existencia no está circunscrita solo a las letras.
Algunos objetivos que esperamos alcanzar:• Que el estudiante, como usuario final, tenga el curso que está llevando desarrollado como un libro (con todas las características de un libro impreso) en formato digital.• Que las profesoras y profesores actualicen la información dada a los estudiantes, mejorando sus contenidos, aplicaciones y ejemplos; pudiendo evaluar sus aportes y coherencia en los cursos que dicta.• Que las profesoras y profesores, y estudiantes logren una familiaridad con el uso de estas nuevas tecnologías.• El libro digital bien elaborado, permitirá dar un buen nivel de conocimientos a las alumnas y alumnos de las universidades nacionales y, especialmente, a los del interior del país donde la calidad de la educación actualmente es muy deficiente tanto por la infraestructura física como por el personal docente.• El pe r sona l docente jugará un r o l de tu to r, f ac i l i t ador y conductor de p r oyec tos

de investigación de las alumnas y alumnos tomando como base el libro digital y las direcciones electró-nicas recomendadas.• Que este proyecto ayude a las universidades nacionales en las acreditaciones internacionales y mejorar la sustentación de sus presupuestos anuales en el Congreso.
En el aspecto legal:• Las autoras o autores ceden sus derechos para esta edición digital, sin perder su autoría, permitiendo que su obra sea puesta en internet como descarga gratuita.• Las autoras o autores pueden hacer nuevas ediciones basadas o no en esta versión digital.
Lima - Perú, enero del 2011
“El conocimiento es útil solo si se difunde y aplica” Víctor López Guzmán Editor

Memorias - XVII CONIMERA
99
1. Introducción
El presente estudio, muestra el análisis delcomportamiento de un buque pesquero en nuestromar. Para dicho fin se hará uso de los conceptosde la Dinámica del Buque. Asimismo se emplearáel software Ship Motion and Sea Load ComputerProgram desarrollado por Naval Ship Research andDevelopment Center.
2. Planteamiento del problema
En nuestro país la industria de laConstrucción Naval juega un rol importante en eldiseño y fabricación. Existen astilleros que norealizan un diseño adecuado debido a que noconsideran muchos de los efectos quemostraremos a continuación en su diseño.
3. Fundamento teórico
3.1 Programa Ship Motion and Sea LoadComputer
Debido a que para poder usar este softwarey entender adecuadamente cada uno de losresultados que este proporciona es necesarioconocer a cabalidad en que teorías estafundamentado este software que fue desarrolladopor NSRDC.
3.2 Teoría de fajas
La respuesta de un barco moviéndose en unfluido que a su vez contiene el efecto del oleajees un fenómeno muy complejo, pues contiene lainteracción entre la dinámica del barco, lahidrodinámica del fluido, la coexistencia en dos
Comportamiento dinámico de una embarcación pesquera en elMar Peruano
Yarín Achachagua, Anwar Julio / Yarín Achachagua, Yasser Hipólito /Palacios Aranda, Mierwen
[email protected] / [email protected] / [email protected]: Msc. César Augusto Salhua Moreno
Universidad Nacional de IngenieríaFacultad de Ingeniería Mecánica - Especialidad de Ingeniería Naval
Resumen.- El presente trabajo describe la metodología utilizada para predecir elcomportamiento presentado por una embarcación de desplazamiento cuando estanavega en determinada condición de mar. Es importante que el ingeniero navaldetermine este comportamiento en la fase de proyecto de la embarcación, porquede esta forma puede evaluar efectos perjudiciales para el desempeño de esta,como por ejemplo la emersión del propulsor, embarque de agua en la cubierta,slamming y excesivas aceleraciones verticales.Los efectos perjudiciales descritos anteriormente son predecidos a través de losespectros de respuesta de la embarcación para una determinada condición de mary para un determinado movimiento. El procedimiento utilizado para la obtención delos Espectros de Respuesta consiste en la superposición del Operador de RespuestaUnitaria en olas regulares de la embarcación para un determinado movimiento(RAO) y el Espectro de Energía de Pierson- Moskowitz utilizado para representaruna determinada el mar en una determinada condición. El Operador de RespuestaUnitaria de la embarcación fue determinado utilizando un programa de Dinámicade Navíos basado en la Teoría de las Rebanadas (Strip Theory) y las diversascondiciones de mar consideradas fueron caracterizadas utilizando datosmetereológicos como la altura significativa (Hs) y periodo medio (Tm) de las olas,siendo estos datos importantes en la generación del Espectro de Energía paradeterminado estado de mar.Son mostrados resultados del comportamiento de una embarcación pesqueraoperando en diversas condiciones típicas del litoral peruano. Los efectos perjudicialesfueron determinados y se evaluó su severidad en el desempeño de la embarcacióna través de criterios de diseño.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
100
medios muy diferentes, fluido y gas, y el efectoextra del oleaje. Debido al gran coste deproducción de un barco, es interesante poder hacerun estudio teórico del comportamiento de este apriori. Para ello se ha desarrollado toda una teoría,la teoría de franjas o fajas. Esta teoría obtienelos coeficientes de unas ecuaciones lineales quegeneran un comportamiento muy semejante alcomportamiento real del barco.
derecha. Para referirnos a los diferentesmovimientos utilizaremos tanto la nomenclaturaespañola como la inglesa:
• Surge: Avance del barco, positivo haciaadelante. Normalmente se trabajará conmodelos linealizados en torno a unavelocidad. Debido a las fluctuaciones enla velocidad, el barco va a estar por delanteo por detrás del punto esperado sinavegase a velocidad constante. Estadesviación es lo que denominaremossurge.
• Sway: Desplazamiento lateral, loconsideraremos positivo hacia babor,izquierda.
• Heave: Arfada o altura del barco, positivohacia arriba.
• Roll: Escora o balanceo lateral del barco,positivo es hundir la parte derecha delbarco, estribor, rotación respecto a eje X.
• Pitch: Cabeceo vertical del barco; positivohundir la proa, rotación respecto a eje Y.
• Yaw: Guiñada o Cabeceo horizontal delbarco; positivo girar hacia la izquierda,rotación respecto a eje Z.
No se contemplarán los grados de flexióndel barco por complicar excesivamente el problemay no ser muy importante en el estudio que sequiere realizar. Estos grados de libertad conllevanseis ecuaciones diferenciales no lineales demovimiento, acopladas entre si. Si se consideraun barco simétrico por babor y estribor, entonceslas ecuaciones se pueden desacoplar en dosgrupos, incluso se pueden aproximar porecuaciones lineales. Un grupo lo constituye elmovimiento longitudinal: surge, heave y pitch. Elotro grupo se encarga del movimiento lateral delbarco: sway, roll y yaw. Nos quedaremos con lasecuaciones del movimiento longitudinal al ser esteel que queremos controlar.
Vamos a utilizar dos sistemas de referencia,uno denominado ejes tierra «Earth» cuyo origense encuentra fijo en tierra y a la altura de la líneade aguas tranquilas, coincidiendo en dirección lavelocidad del barco y el eje X, y otro denominadoejes cuerpo «Body» que se encuentra fijo al centrode gravedad del barco y en continua orientacióncon él. El ángulo que forman la velocidad de avancedel oleaje con respecto a la velocidad del barco,µ, será 180º cuando el barco se encuentre lasolas en sentido contrario.
El comportamiento del buque cuando estaen el mar tendrá una relevancia importante conla incidencia de las olas por donde navegara elbuque, algunas de estas serán:
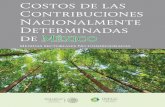
Figura 1. Casco del buque representado por unnúmero finito de fajas.
Además los cálculos teóricos permitenampliar el rango de estudio, incluso realizarexperimentos que en el barco real o en la maquetason difíciles de conseguir. El estudio teórico serealizado sobre oleaje regular y se extrapola amares irregulares basándonos en que el marirregular es una composición de olas regulares.Un barco moviéndose con una velocidad media,sin ningún tipo de sujeción, enfrentándose a unoleaje posee seis grados de libertad, tres detraslación y tres de rotación, como se muestraen la figura 1.
Figura 2.
El sistema de referencia que vamos a tomarserá el mismo que el del CEHIPAR, para elconvenio de signos utilizaremos los ejes de la mano

Memorias - XVII CONIMERA
101
• Resistencia estructural .• Estabilidad.• Movimiento.• Velocidad y potencia.• Incidencia de agua en cubierta.• Impacto contra las olas.
Cuando las olas inciden con el buque estetiene que responder con una buena resistenciaestructural. El buque tiene que tener una buenaestabilidad desde su diseño para soportarcondiciones críticas cuando este entre en contactocon las olas. En cuanto a los movimientos delbuque, si estos movimientos son excesivosserán indeseados sobre todo cuando los buqueslleven pasajeros, por lo cual se requieren de unconfort. En cuanto a la velocidad y la potencialas olas causaran que la resistencia al avanceaumente por consiguiente la velocidad de avancedel buque disminuye, además produciráncondiciones desfavorables para el sistema depropulsión.
La incidencia de agua en la cubiertadependerá del francobordo y de la altura mínimade proa. El impacto de proa producirá loque se conoce como SLAMING, que se refiereal impacto de la proa con las olas, esteefecto tendrá importancia relevante deentre 10 % a 25 % de la eslora entreperpendicular.
3.2 Incidencia del buque con la ola
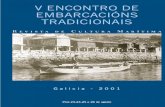
Cuando nos referimos a las olas que seproducen en el mar nos referimos a olas quetienen una característica de ola gravitacionalregular; esto quiere decir que son olas producidasy formadas por gravedad, mareas altas y mareasbajas. Estas olas están caracterizadas por superiodo (T) y frecuencia (Wo)
Figura 4X: Angulo entre la velocidad del buque y la
velocidad de la ola
Del grafico anterior se puede observar quela velocidad relativa entre el buque y la ola estadado por:
Vw-UcosX
Por otro lado también el podemos decir queel tiempo requerido para que el buque alcancela próxima cresta (Te).Este tiempo esta dado porla siguiente relación básica.
Te =XUVw cos−
λ (1)
También se sabe que :
We = Te
π2 (2)
Vw =T
λ =
TWo
g2
2π
Remplazando (1) en (2)
We =( )
VwT
XUVw cos2 −π
Ordenando los términos teniendo en cuentala relación (3)
We = ( )
−
g
XWoUWo
cos1 (4)
La relación (4) nos representa la frecuenciade encuentro del buque con las olas.
En la figura siguiente se observa laconsideración principalmente de este estudio laconsideración de un mar de proa.
Figura3periodo(T), frecuencia(Wo), longitud de ola(λ)
λ = 2
2
Wo
gπ

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
102
3.3 Características de las olas en el mar
La característica mas importante de las olasoceánicas es su irregularidad esto en el espacioy en el tiempo .Para los cálculos de seakeeping.El estado del mar mantiene sus característicasestadísticas, esto es estad ísticamenteestacionario.
3.4 Seakeeping
Este efecto se da cuando ocurren en elbuque embarque de agua por la proa, golpe dela proa con el mar (SLAMING), efecto deaceleraciones especialmente verticales debido alHEAVE y PITCH,en puntos críticos a lo largo dela eslora del buque, p érdidas de velocidad.Debido a la resistencia adicional existente en olasy debido a reducciones voluntarias, rotaciónen vaci ó del motor; debido a la inmersi ón delpropulsor.
3.5 Generación de las olas
Las olas son generadas por la interacciónentre el viento y la superficie del agua, esto a travésde:
• Fuerzas de fricción entre los dos fluidos.• Campo de presión local que cambia en
espacio y tiempo.• Si las olas son de corta amplitud luego
la propagación y dispersión de olas esgobernado por el principio desuperposición.
• El estado del mar resulta por múltiplesinteracciones entre el viento y la superficielibre, que varia en espacio y tiempo.
3.6 Respuestas verticales
• En términos prácticos la alta frecuenciaes un problema como las bajasfrecuencias, las fuerzas externas sondenominadas por fraude-krilov fuerzasrestauradoras.
• En cuanto al movimiento de las olasACRO frecuencias de encuentro allí podráser problemas con una alta respuestairreal.
• En general la teoría de franjas da buenosresultados del movimiento vertical delbuque.
• Referente al movimiento de roll laviscosidad húmeda es importante y unabuena estimación de este coeficiente esesencial.
• Predicción del momento flector vertical yla fuerza cortante son satisfactorios parael gran coeficiente de bloque del buque.
Para c oeficiente de b loque p equeño e lmétodo es no viable a representar el asimétricodel momento flector vertical.
3.7 Respuestas horizontales
• En general uno puede expresar una teoríade franjas pudiendo no ser buenos paralas respuestas verticales.
• Desde allí son fuerzas no restauradorasla buena estimación de la radiación ydifracción de fuerzas todav ía parapequeñas frecuencias es importante.
3.8 Comentarios finales
• Este capitulo presenta con frecuenciasoluciones para el problema de losmovimientos y cargas estructuralesinducidas a buques que avanzan en olasarmónicas.
• La solución esta basada en la teor ía defranjas que aproxima el medio lineal 3Dreduciéndolo a 2D alrededor de crucede secciones.
• Los efectos del la velocidad a proa sonintroducidas en un muy simplificado modoy cuenta solo al ángulo de ataque delcasco con el flujo hacia el infinito.
• Las s implificaciones son:o El casco es muy delgado el vector
normal a la superficie del casco es2D
o La frecuencia de oscilaci ón es alto.
Figura 5.

Memorias - XVII CONIMERA
103
La incidencia de las olas y los movimientosson de pequeñas amplitudes.
4.1 Análisis en Mar Irregular
Para empezar este análisis se debeseleccionar el Estado de Mar que refleja la cantidadde energía y su distribución entre las olascomponentes presentes y que están incidiendosobre la embarcación En este caso, se haconsiderado realizar el análisis para los Estadosde Mar 2, 3, 4 y 5, cuyas características semuestran en la tabla 1.
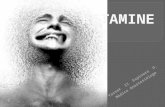
Como resultado de la aplicación del espectromatemático seleccionado se obtuvo el Espectrode Mar en función de la frecuencia de olas, paraasí poder determinar su Espectro de Marmodificado en función de la frecuencia deencuentro, cuyas representaciones graficas semuestran en la figura 6.
Tipo de
mar
T (s)
Lw (m)
Hs (m)
Lw/Lpp Lw/Hs Hs (pies)
2 2.9 13.131 0.427 0.429 30.771 1.4
3 4 24.981 1.006 0.816 24.836 3.3
4 5.1 40.610 1.859 1.327 21.842 6.1
5 5.7 50.727 2.438 1.658 20.803 8
Tabla 1.
Donde:Lw = Longitud de la OlaHs = Altura significativa de la OlaT = Periodo
El análisis desarrollado se realizo siguiendoel criterio de la Tabla 2.
DESPLAZAMIENTO VELOCIDAD
100% 8 nudos
401.7TON 11 nudos
75% 8 nudos
301.27TON 11nudos Tabla 2.
Además se considero que el ángulo deincidencia del buque con las olas será de 180,o igualmente llamada seahead.
Para describirlo analíticamente, se escogióentre varios espectros matemáticos al de la ITTCec5, el cual esta basado en un único parámetroque es la altura significativa de la ola, cuya funciónbásica es determinar el valor de dos constantesA ec6 y B ec7.
S �(�) = (A/ �^5)*EXP(-B/ �^4) (5)
Donde Ay B se definen de la siguiente manera:
A = 8.1*10^-3*g^2 (6)
B = 3.11/H1/3^2 (7)
H1/ 3 = Altura significativa de la Olag = aceleración de la gravedad
Espectro del Mar - ITTC
0 . 0 0 0
0 . 0 10
0 . 0 2 0
0 . 0 3 0
0 . 0 4 0
0 . 0 5 0
0 . 0 6 0
0 . 0 7 0
0 . 0 8 0
0 . 0 0 0 0 . 5 0 0 1. 0 0 0 1. 5 0 0 2 . 0 0 0 2 . 5 0 0 3 . 0 0 0 3 . 5 0 0 4 . 0 0 0
w (rad/s)
S(w
) (m
2s) S(wo)
S(we)
A continuación se calcula el espectro derepuesta ec8, producto del cuadrado de la amplitudde respuesta por unidad de amplitud de olaincidente, multiplicado por el espectro de olasincidentes.
Sw(ω) = (W^2)* S η (ω) (8)
Siendo sus resultados mostrados en formagrafica en las figuras 7 y 8, para los movimientosdel buque de HEAVE y PITCH respectivamente.
Figura 6: Para un análisis realizado con unestado de mar 3, 8 nudos y 75% de su
desplazamiento.
Figura 7: Para un análisis realizado con un estadode mar 3, 8 nudos y 75% de su desplazamiento.
S-Heave(we)
-0.005
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0 0.5 1 1.5 2 2.5 3 3.5 4
we(rad/s)
S-H
eave
(we)
-
(m2s
)
S-Pitch
-0.005
0.000
0.005
0.010
0.015
0.020
0.025
0.030
0.035
0.040
0.045
0 0.5 1 1.5 2 2.5 3 3.5 4
we (rad/s)
S-P
itch
(ra
d2s
)
Figura 8: Para un análisis realizado con un estadode mar 3, 8 nudos y 75% de su desplazamiento.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
104
Como parte de nuestro c álculo sedeterminaran las áreas bajo las curvas de losespectros de respuestas que se puedan obtener,para ello se hace uso de la siguiente expresión:
nm = ∫ω^n*S(ω)*dω (9)Donde:
nm = área de la curva del espectro de respuesta
4.2 Cálculo d e l os M ovimientos d elBuque
Las funciones que definen el movimiento delbuque para los movimientos de heave y pitch, lascuales tienen como centro de coordenadas elcentro de gravedad del buque y son desarrolladaspara describir el movimiento vertical de un puntoubicado a u na d istancia ix del C.G., tienen lasiguiente forma:
θχ .ivi −ℑ=ℑ
Heave: ).cos(. ℑ−ℑ=ℑ γtweo (10)
Pitch: ).cos(. θγθθ −= tweo (11)
De la suma de las funciones 10 y11obtenemos la función resultante que describeel movimiento vertical total del buque quedadefinido en ec12.
)cos(. vevov tw γ−ℑ=ℑ (12)
Donde:
)cos(..2).( 22θγγθθ −ℑ−+ℑ=ℑ ℑoiooiovo xx
−ℑ−ℑ
=ℑ
ℑ
θ
θ
γθγγθγ
γcos..cos.
...arctan
oio
oiov x
senxsen
Así mismo la ecuaci ón que define elmovimiento relativo del buque queda definida conla siguiente expresión:
),( txhvivR −ℑ=ℑDonde:
h = Ecuación que define el movimiento de lasuperficie del Mar
)..cos(. twxkhh eiea −= (13)
viℑ = Ecuación que define el movimiento delbuque para un punto ubicado en ix
).cos(. vevovi tw γ−ℑ=ℑ (14)
de las ecuaciones 13 y 14 obtenemos la expresiónrepresentativa del movimiento relativo del buqueZvre.
vR vRo e vR.cos(w .t )γℑ = ℑ −
Donde:
( )ievavoavovRo xkhh .cos..222 −ℑ−+ℑ=ℑ γ
−ℑ−ℑ
=ieavvo
ieavvovR xkh
xsenkhsen.cos.cos....
arctanγγ
γ
4.3 Calculo de la probabilidad deembarque de agua
Para determinar la probabilidad de embarquede agua ec15 se debe determinar primero losvalores de las áreas bajos las curvas de losespectros d e m ovimiento oSm y la del áreacorrespondiente al espectro de aceleración Sm2haciendo uso de ec9.
{ } oS
f
mvR efp 2`'
2'
−=≥ℑ (15)
Donde:
f = francobordooSm = Área del espectro de movimiento
relativo
Además se calcula el periodo característicode pitch con la siguiente formula:
S
oS
mmTT
222
2πθ =≈
Por ultimo para obtener el n úmero deembarques de agua por hora se recurre a lasiguiente relación:
3600.TPNT =
Donde:
P = Probabilidad de embarqueT = Periodo caracter ístico de pitch

Memorias - XVII CONIMERA
105
4.4 Probabilidad de Emersión delPropulsor
La probabilidad de embarque de agua secalcula de la siguiente expresión:
{ }( )
oS
t
mvR etp 2
2
−
=≥ℑ (16)
Donde:
t = distancia del extremo superior delpropulsor a la superficie del agua
oSm = Área del espectro de movimientorelativo
4.5 Aceleración Vertical del Buque
Se determina la aceleración vertical delbuque como resultado de la segunda derivada dela ecuación de movimiento del buque ec12respecto del tiempo para una determinada posicióna lo largo de la eslora del buque.
)cos(..'' 2vevoev tww γ−ℑ−=ℑ
Donde:
ew = Frecuencia de encuentro
voℑ = Amplitud del movimiento del buque
vγ = Angulo de desfasaje total
4.6 Probabilidad de Slamming
La probabilidad de slamming es calculadade la suma de la probabilidad de emersión delpropulsor ec16 y la probabilidad de que la amplitudde la velocidad relativa exceda la velocidad limitede slamming ec17.
{ }( )
Smep 2
2
2
ον
ονν−
=≥ (17)
Donde:
ον = Velocidad limita de Slamming
Sm2 = Área bajo el espectro de velocidadrelativa
La probabilidad de slammming resulta de lasuma de las ecuaciones 16 y 17.
{ }( ) ( )
)22
(2
2
2
oS
t
S mmeslamp+−
=ον
4.7 Probabilidad de degradación de laperformancia humana
Esta es la representación de la reduccióndel comfort que como consecuencia de suincremento dificulta el desarrollo de las laboresde las personas abordo, siendo esta su ecuaciónrepresentativa:
715.04
2
2 ).).2
1(.392.1087.3( S
oS
S mm
mLnSM
+=
πDonde:
oSm = Área del espectro de movimiento total
Sm2 = Área bajo el espectro de velocidad total
Sm4 = Área bajo el espectro de velocidad total
SM = Magnitud subjetiva
5. Resultados obtenidos
Las tablas del 3 al 18 muestran lasprobabilidades, que resultado de nuestro análisis,siguiendo el criterio mostrado en la Tabla 2. Asítambién la tabla 19 muestra las probabilidadesde degradación de la performancia humana parael mismo criterio.
Finalmente se muestra la tabla 20 con losresultados de la probabilidad de superar el criteriode aceleración para un punto ubicación a 87.1%de la eslora.
Tabla 3. Análisis para estado de Mar 2, 8 nudos de velocidad y al 75% de su desplazamiento.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
106
Tabla 4. Análisis para estado de Mar 2, 8 nudos de velocidad y al 100% de su desplazamiento.
Tabla 5. Análisis para estado de Mar 2, 11 nudos de velocidad y al 75% de su desplazamiento.
Tabla 6. Análisis para estado de Mar 2, 11 nudos de velocidad y al 100% de su desplazamiento.
Tabla 7. Análisis para estado de Mar 3, 8 nudos de velocidad y al 75% de su desplazamiento.
Tabla 8. Análisis para estado de Mar 3, 8 nudos de velocidad y al 100% de su desplazamiento.

Memorias - XVII CONIMERA
107
Tabla 9. Análisis para estado de Mar 3, 11 nudos de velocidad y al 75% de su desplazamiento.
Tabla 10. Análisis para estado de Mar 3, 11 nudos de velocidad y al 100% de su desplazamiento.
Tabla 11. Análisis para estado de Mar 4, 8 nudos de velocidad y al 75% de su desplazamiento.
Tabla 12. Análisis para estado de Mar 4, 8 nudos de velocidad y al 100% de su desplazamiento.
Tabla 13. Análisis para estado de Mar 4, 11 nudos de velocidad y al 75% de su desplazamiento.

Colegio de Ingenieros del Perú - CDL - Capítulo de Ingeniería Mecánica y Mecánica Eléctrica
108
Tabla 14. Análisis para estado de Mar 4, 11 nudos de velocidad y al 100% de su desplazamiento.
Tabla 15. Análisis para estado de Mar 5, 8 nudos de velocidad y al 75% de su desplazamiento.
Tabla 16. Análisis para estado de Mar 5, 8 nudos de velocidad y al 100% de su desplazamiento.
Tabla 17. Análisis para estado de Mar 5, 11 nudos de velocidad y al 75% de su desplazamiento.
Tabla 18. Análisis para estado de Mar 5, 11 nudos de velocidad y al 100% de su desplazamiento.

Memorias - XVII CONIMERA
109
Tabla 19. Resultados de las Probabilidades de degradación de la performancia humana
Tabla 20. Resultados de Probabilidad para superar el criterio de aceleración a 87.1%de la Eslora total.
6. Conclusiones y Recomendaciones
Obtuvimos diversos espectros matemáticoscomo el espectro de movimiento buque, movi-miento relativo del buque respecto a la superficiedel mar, el espectro de respuestas del buque enheave y pitch de los cuales obtuvimos la informaciónnecesaria para desarrollar el análisis propuestoy de esta manera determinar el Seakeeping delbuque durante la etapa previa de diseño.
De los resultados obtenidos podemosconcluir que el este buque pesquero presentara
un comportamiento adecuado frente a los estadosde mar mas leves y estará en el limite de loscriterios de diseño ante niveles superiores.
7. Bibliografía
(1) Edwar Lewis, Principles of Naval Architecture
(2) K. J. Rawson, Basic Ship Theory
(3) Rameswar Bhattacharyya, Dynamics of MarineVehicles.