ControlAutomatico_TECSUP
45
Control Automático TECSUP
-
Upload
yvan-huaman -
Category
Documents
-
view
215 -
download
0
Transcript of ControlAutomatico_TECSUP

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 1/45
Control Automático
TECSUP

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 2/45
El control de procesos
W, T i
W, T
T Válvula
Vapor de agua
Fig. 1.1 Proceso de Calentamiento de un Líquido
1. El Proceso : Objetivo calentar el liquido hasta unatemperatura T (establecida)

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 3/45
2. Variables del procesoPerturbaciones
ProcesoVariables deentrada
Variables desalida
Variables manipuladas
Variable de entrada: Flujo, temperatura en la entrada
Variable de Salida: Flujo, temperatura en la salida
Variable manipulada:Caudal de vapor
Perturbaciones: Temperatura de los alrededores

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 4/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 5/45
Válvula decontrol
T
Entrada de liquidoW, T i
Salida de liquidoW, T
Medición detemperatura Vapor
3.2 Control Automático
Controlador
Punto deReferencia
a) Sistema de control retroalimentación

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 6/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 7/45
Operaciones basicas en sistemas decontrol
• Medición, la medición de la variable a sercontrolada es usualmente hecha por lacombinación de sensor y transmisor.
• Decisión: Basado en la medición, el controladordebe decidir qué hacer para mantener lavariable en su valor deseado.
• Acción: Como resultado de la decisión delcontrolador, el sistema debe tomar una acción,esta es finalmente realizada por el actuador.

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 8/45
Medición detemperatura
Válvula decontrol
Vapor
Punto deReferencia
T
Salida de liquidoW, T
Entrada de liquidoW, T i
Control dealimentación dìrecta
Mediciónde fl ujo
M edición detemperatura
b) Sistema de control de alimentación directa

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 9/45
Entrada de liquidoW, T i
T
Control de
alimentacióndìrecta
Mediciónde fl ujo
M edición detemperatura
Señal de temperatura al controlador
Punto de
referencia
Control deRetroalimen -
tación
c) Control combinado de retroalimentacióny alimentación directa
Válvula decontrol
Vapor

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 10/45
3.2 Sistema de control por computadora
HornoEléctrico
ConvertidorA/D
Interfaz Amplificador Relevador
Interfaz
Resistencia
Entradaprogramada
Temperatura dereferencia(Temperaturadeseada)
Sensor
Controlador

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 11/45
Términos Importantes y objetivos de
un sistema de control•Dinámica•Variable controlada•Variable manipulada•“Set point”
•Perturbación•Lazo abierto•Lazo cerrado

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 12/45
4. Diseño de un sistema de control4.1 EL Sistema: Intercambiador de calor
TCVálvulade control
Entrada de fluido
de calentamientoT co , F co
Salida de fluido
de calentamientoT c , F c
Controlador detemperatura
Temperatura dereferencia T R
Salida de fluidode proceso
T p , F p
Entrada defluido de proceso
T po , F po

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 13/45
SP E
Elemento demedida
Comparador
T medida
Controlador
Controlador
Válvula Intercambiador
Punto demedición
T p
Carga
4.2a. Diagrama de bloquesDiagrama de bloques: control de retroalimentación

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 14/45
4.2 b. Diagrama de bloques simplificado
T p G P
R E F c
F c
p
G mT Pm
G VG C
CONTROLADOR VALVULA PROCESO
MEDIDOR
G: Función de transferencia = Salida / entrada
Sistema de retroalimentacion negativo

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 15/45
Operaciones elementales con
diagramas de bloques
+-
c
r e
e = r - c
Diferencia
++
c
r e
e = r + c
Suma
+-
c
r e
e = r - c + u
+
u
Suma y diferencia

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 16/45
4.3 Analisis del sistema de control
1. Dominio de Laplace: Teoria Clásica ,usa el concepto de función detransferencia
2. Dominio del tiempo: Teoría Moderna usa el concepto de espacio de estado

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 17/45
Teoria Clásica
Encontrar la función de transferencia de cada elemento(cada bloque) del sistema de control
Función de transferencia : G(s) =Salida
Entrada
Analisis en el dominio de Laplace

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 18/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 19/45
Donde : T c = temperatura de salida del fluido caliente
T c0 = temperatura de entrada del fluido caliente
T p = temperatura de salida del fluido de proceso (variable que se va acontrolar)
T p0 = temperatura de entrada del fluido de proceso
F c = flujo de masa del fluido caliente (variable que se va a manipular)
F p = flujo de masa del fluido de proceso
U = coeficiente total de transferencia de calor
A = área de transferencia de calor
T = diferencia verdadera de temperaturas
Cp c = capacidad calorífica del fluido caliente
Cp p = capacidad calorífica del fluido de proceso
M c = masa del fluido caliente dentro del intercambiador
M p = masa del fluido de proceso dentro del intercambiador
t = tiempo

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 20/45
Reacomodando la Ec. (3) para el fluído de proceso
= (T po – T p ) + U(t) A T(T) /F p Cp p (4)
Definiendo la constante de tiempo
= p
(tiempo)y A T(T) /F p Cp p = k 1
La Ec. (4) se puede escribir como
+ T p = T po + k 1 U (5) En el estado estacionario, la Ec. (5) será:
+ T ps = T pos + k 1 U s = 0 (6)

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 21/45
Restando la Ec. (6) de la Ec. (5) se tiene
+ (T p - T ps ) = (T po - T pos ) + k 1 (U – U s ) (7)
Definiendo las variables de desviación:
(T p - T ps ) = T p
(U – U s ) = U
Además, T po = T pos la temperatura de entrada es la misma en cualquier
instante. Con lo cual la Ec. (7) será:
+ T p = k 1 U (8)
Aplicando la transformada de Laplace a la Ec. (8) se tiene:
p [ s T p (s) – T p (0) ] + T p (s) = k 1 U(s) (9)

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 22/45
Simplificando la Ec. (9) se tiene
( 10)
Usando el mismo procedimiento para la Ec. (10) (fluido decalentamiento) y aplicando la propiedad de traslación de latransformada, para lo cual se sabe que:
Q = F c (T c – T co ) = U A T (11)
se tiene la función de transferencia para el fluido de calentamiento
(12)

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 23/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 24/45
Por conveniencia, a T p denominaremos X y a F c como F , conlo cual la Ec. (13) se escribe
(14)
Tomando los valores experimentales para el estado estacionario se
tiene: K P = 0.07 C/kg seg
Así mismo para las constantes de tiempo se tiene: 1 = 3.42 seg.
2 = 3 seg.
Sustituyendo estos valores en la anterior función de transferencia yarreglando se tiene

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 25/45
(15)
Función de transferencia del proceso

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 26/45
2. Controlador
De dos posiciones o intermitentes (encendido – apagado):
“ON/OFF ”
Proporcional – Integral – Derivativo: PIDC
Proporcional: PC
Integral: IC
Proporcional – Integral: PIC
Proporcional – Derivativo: PDC

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 27/45
Seleccionando un PID
Su función de transferencia es
Donde K p = ganancia proporcional,
i = tiempo integral, y
d = tiempo derivativo.
G(s) = = K p
l d d d ( )

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 28/45
3. Elemento de medida (sensor)
En muchos sistemas prácticos, la constante de tiempo de la válvulaes muy pequeña comparada con las constantes de tiempo de otros
componentes del sistema de control, y su función de transferencia puede ser aproximada a una constante
Siendo la entrada al elemento de medida la variable leída ( Y )y la salida el valor emitido hacia el controlador ( Y m), la
función de transferencia es
3. Elemento de control final (válvula)
Gm = H(s ) = = 1
GV = = K V = 1
E ibi d d bl q f ió d t f i ti

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 29/45
T p T R E F cp
1T Pm
1 G C
CONTROLADOR VALVULA PROCESO
MEDIDOR
8,14915,1451
2 s s
s
s K
d
i
c
11
Escribiendo en cada bloque su función de transferencia se tiene:
El siguiente paso es reducir a un solo bloque de la forma:
GT R T P
Para lo cual se debe hacer uso del algebra de bloques
Bloques en serie

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 30/45
G1 G2
x y z
G1G2
x z
G1
G2
x y G1 + G2
x y
G1
G2
x y
+-
x y
21
1
1 GG
G
Bloques en serie
Bloques en paralelo
Eliminación de un anillo menor

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 31/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 32/45
Sintonización del controlador: Búsqueda de los mejores valores deK c, K i y K d

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 33/45
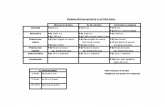
RESPUESTA BC TIEMPO SUBIDA SOBREIMPULSOTIEMPO DEESTABLECIMIENTO
ERROR R-P
K p Disminuye Aumenta Poca variación Disminuye
K i Disminuye Aumenta Aumenta Elimina
K d Poca variación Disminuye Disminuye Poca variación
Características PID

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 34/45
» Kp=70;
» Kd=150;
» Ki=10;
» num=[Kd Kp Ki];
» den=[145.5 91+Kd 14.8+Kp Ki];
» t=0:0.01:20;
» step(num,den,t)
Programa Matlab

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 35/45
Se obtiene la respuesta escalón
Kp=70
Kd=150
Ki=10

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 36/45
Para otros valores de los parámetros

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 37/45
TEORIA DE CONTROL MODERNA

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 38/45
1. El espacio de estadoTEORIA DE CONTROL MODERNA
Una ecuación diferencial de orden n puededescomponerse en n ecuaciones diferenciales de
primer orden
Luego el sistema de ecuaciones se puedeescribir de la forma
X = Ax + Bu
y = Cx + Du
.

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 39/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 40/45
C =
1.0309 0.4811 0.0687
D =0
A =
-1.6564 -0.5828 -0.0687
1.0000 0 0
0 1.0000 0
B =
1
0
0
Se obtiene una representación en el espacio de estado
lHay muchas infinitas representaciones en elespacio de estados para este sistema.

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 41/45
De igual manera se puede pasar del espacio de estadoa la función de transferencia
» A=[ -1.6564 -0.5828 -0.0687; 1.0000 0 0
; 0 1.0000 0 ];
» B=[1; 0; 0];
» C=[ 1.0309 0.4811 0.0687 ];
» D=[0 0 0];
» [num,den]=ss2tf(A,B,C,D,1)
Obteniendose la respuesta la función de
transferencia

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 42/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 43/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 44/45

8/13/2019 ControlAutomatico_TECSUP
http://slidepdf.com/reader/full/controlautomaticotecsup 45/45