EE00304C

of 55
Transcript of EE00304C
-
8/14/2019 EE00304C
1/55
4. Anlisis frecuencial de sistemas de control 233
4. Anlisis frecuencial de sistemas de control
En el presente captulo se describir la metodologa de anlisis basada en la respuesta frecuencial deun sistema de control. Dicha metodologa requiere el conocimiento de la respuesta frecuencial delsistema en lazo abierto (que puede obtenerse de un modo sencillo a partir de medidas de la respuestaen rgimen permanente senoidal) para, posteriormente, aplicar el criterio de estabilidad de Nyquist,que permitir determinar la estabilidad absoluta del sistema en lazo cerrado.
Los mrgenes de fase y ganancia pueden considerarse extensiones del criterio de estabilidad de
Nyquist y permiten determinar la estabilidad relativa de un sistema de control.Por ltimo, en este tema se expondrn aquellas caractersticas a tener en cuenta para desarrollar elanlisis de un sistema de control en tiempo discreto a partir de su respuesta frecuencial.
4.1 Respuesta frecuencial de sistemas de tiempo continuo
Dado el sistema de tiempo continuo de la figura 4.1:
G(s) E(s) C(s)
Fig. 4.1 Sistema de tiempo continuo
donde: [ ]( ) ( ) ( )
E s L ts s j s j
( ) sen( )= =+
= +
2 2
En el sistema definido, se obtiene el rgimen permanente senoidal (RPS) considerando la respuestadel sistema estable cuando el tiempo tiende a infinito y se posee una seal de entrada senoidal.
( ) ( )C s
G ss j s j
( )( )
=+
(4.1)
Para obtener la antitransformada de Laplace debe desarrollarse C(s) en fracciones parciales.
( ) ( )C s
ks j
ks j
Cg s( ) ( )=+
+
+1 2
(4.2)
los autores, 1998; Edicions UPC, 1998. Quedan rigurosamente prohibidas, sin la autorizacin escrita de los titulares del "copyright", bajo las sanciones establecidas en lleyes, la reproduccin total o parcial de esta obra por cualquier medio o procedimiento, comprendidos la reprografa y el tratam iento informtico, y la distribucin deejemplares de ella mediante alquiler o prstamo pblicos, as como la exportacin e importacin de ejemplares para su distribucin y venta fuera del mbito de la UninEuropea.
-
8/14/2019 EE00304C
2/55
Teora de control. Diseo electrnico234
Los dos primeros trminos del desarrollo son originados por las races de la transformada de Laplacede la seal senoidal de entrada, mientras que Cg(s) contiene la serie de trminos correspondientes aldesarrollo en fracciones parciales de los polos de G(s). El RPS nicamente existe en sistemas estables,dado que ello implica que los trminos temporales que caracterizan la respuesta transitoria del sistemadesaparecen cuando el tiempo crece suficientemente:
[ ]L Cg s cg t = 1 0( ) ( ) cuando t .
Denominando Css(s) a la transformada de Laplace de la seal que perdura cuando el tiempo crezcainfinitamente (estado estacionario):
( ) ( )Css s
ks j
ks j
( ) =+
+
1 2
(4.3)
Clculo de los residuos:
( )( ) ( )
k C s s jG j
jk
G j js j
1 22 2
= + =
==( ) ;
(4.4)
Debe observarse que: ( )G j G s s j = =( ) es la respuesta frecuencial del sistema de tiempo continuo,esto es, debe evaluarse la funcin de transferencia en un punto del plano S ubicado sobre el ejeimaginario.
A partir de la descripcin del procedimiento de clculo puede indicarse que( )G j es una funcin devariable compleja, y verifica:
( ) ( ) ( )G j G j e j G j = (4.5)
( ) ( ) ( ) ( ) ( )G j G j e G j e j G j j G j = = (4.6)
Realizando la antitransformada de la ecuacin de Css(s), se obtiene:
( ) ( )C t k e k ess j t j t( ) = + 1 2 (4.7)
Sustituyendo las expresiones de los residuos k1 y k2:
( )( )( ) ( )( )
( ) ( )( )Css t G j e e j
G j t G j j t G j j t G j
( ) sen= = + + +
2(4.8)
En conclusin, la respuesta de un sistema de tiempo continuo en RPS es una seal senoidal con igualfrecuencia que la seal de entrada, con una amplitud igual al producto de la amplitud de entrada por el
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
3/55
4. Anlisis frecuencial de sistemas de control 235
mdulo de la respuesta frecuencial, y cuya fase es igual a la suma de fases de la seal de entrada y lafase de su respuesta frecuencial. De este modo, no es necesario realizar la antitransformada de Laplacepara determinar cul es la salida de un sistema de tiempo continuo estable en RPS.
Debe observarse que la obtencin de medidas experimentales de la respuesta frecuencial de un sistemaes muy sencilla, debido a que puede utilizarse la propia seal de excitacin para realizar elsincronismo de la medida. De este modo, se puede obtener la respuesta frecuencial a partir de medidasexperimentales sin necesidad de conocer la funcin de transferencia del sistema.
4.1.1 Formas de representacin de la respuesta frecuencial
Las formas ms habituales de representar la respuesta frecuencial de un sistema son:
- Diagrama de Bode en mdulo y fase: Diagrama en mdulo o fase de( )G j respecto a un ejefrecuencial.
- Diagrama polar: Diagrama de mdulo y fase de( )G j en el plano ( )G j (0 < ). En la figura4.2 se muestran los ejes coordenados de un diagrama polar, as como la informacin de mdulo y faseque puede extraerse de un punto de dicho diagrama.
G j o( )
[ ]Re ( )G jA o( )
B o( )
[ ]Im ( )G j
Fig. 4.2 Ejes diagrama polar.
G j A jB G j eo o o o j G j o( ) ( ) ( ( )) ( ) = + =
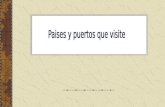
En la figura 4.3 se representa el diagrama polar de un sistema de tercer orden, donde se puedeobservar la evolucin de la fase desde 0o hasta -270o correspondientes a0 y ,respectivamente. Debe observarse que el diagrama posee un sentido en frecuencias crecientes, demanera que 0 1 2< < . El diagrama polar posee la informacin de fase y mdulo de la respuesta
frecuencial en una nica representacin, a diferencia del diagrama de Bode que los representa engrficas separadas.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
4/55
Teora de control. Diseo electrnico236
-1.5 -1 -0.5 0 0.5
-2
-1.5
-1
-0.5
0
0.5
Eje Real
Eje Imaginario
Im[G(j1)]
1
2
0
=0
Re[G(j1)]
G(j1)
Fase[G(j1)]
Fig. 4.3 Diagrama polar sistema de tercer orden.
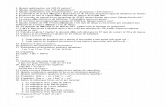
Para mostrar la informacin contenida en un diagrama polar, pueden observarse las distintasrespuestas frecuenciales que se muestran en la figura 4.4, correspondientes al sistema de segundoorden siguiente:
G ss s
( ) =+ +
1
2 12
-1.5 -1 -0.5 0 0.5 1 1.5-2.5
-2
-1.5
-1
-0.5
0
0.5
Eje Real
Eje Imaginario
=2=1
=0.5
=0.25
=n
=n
=0
Fig. 4.4 Diagrama polar de un sistema de segundo orden.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
5/55
-
8/14/2019 EE00304C
6/55
Teora de control. Diseo electrnico238
N=Z-P; donde:N Sentido horario
N Sentido an>
< 0
0 tihorario
En la figura 4.6 se muestra el teorema de la representacin de un modo grfico. En dicha figura puedeobservarse que se rodea un polo de la funcin F(s) en sentido horario. Rodear un polo de una funcinen un sentido implica lograr un rodeo al origen en sentido contrario; este resultado es lgico al realizardicho polo una contribucin total de 360o de fase en la funcin (en oposicin de fase debido a lacaracterstica de un polo). El efecto contrario se verificara al evaluar un cero.
j
Re[F(s)]
Im[(F(s)]
Fig. 4.6 Teorema de la representacin.
El criterio de estabilidad de Nyquist escoge como funcin evaluable el propio polinomiocaracterstico, y evala la existencia de ceros de dicho polinomio en un contorno que contiene todo elsemiplano derecho del plano S mediante la aplicacin del teorema de la representacin. As,F(s)=1+G(s)H(s), donde se supone el conocimiento, a priori, de la funcin de transferencia en lazoabierto G(s)H(s) (de este modo, el parmetro P queda determinado como el nmero de polos en lazoabierto que se encuentran en el semiplano derecho del plano S).
Mediante la transformacin del contorno denominado recorrido de Nyquist (que contiene todo elsemiplano derecho del plano S) a travs de la funcin F(s), se conocen el nmero de rodeos al origenen el plano F(s) (y su signo); y, por ltimo, aplicando el teorema de la representacin, se determina elnmero de ceros de la ecuacin caracterstica Z (polos en lazo cerrado) que existen en semiplanoderecho del plano S. Obsrvese que, si bien este procedimiento es suficiente para determinar si unsistema es estable, este mtodo permitir adems determinar la existencia de races de la ecuacincaracterstica sobre el eje imaginario.
4.2.2 Recorrido de Nyquist
Como ya se ha comentado, el recorrido de Nyquist, fig. 4.7., es un contorno cerrado continuorecorrido en sentido horario que contiene todo el semiplano derecho en su interior. Debe conocerse latransformacin de dicho recorrido mediante la funcin F(s)=1+G(s)H(s) para determinar el nmero derodeos al origen existentes en el plano F(s). Para poder aplicar la transformacin conforme esnecesario presuponer que no existen polos de F(s) (esto es, no existen polos en lazo abierto) en el ejeimaginario.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
7/55
4. Anlisis frecuencial de sistemas de control 239
j
Recorrido de Nyquist
A
B
C
Fig. 4.7 Recorrido de Nyquist.
La transformacin del recorrido de Nyquist puede descomponerse en dos tramos que a continuacin seestudiarn por separado, tal y como muestra la figura 4.7.
- Transformacin del tramo ABC mediante la funcin F(s)=1+G(s)H(s). (s)
Dado que el sistema en lazo abierto es causal se cumple:
lim G s H s ctes
+ =1 ( ) ( ) . (4.9)
Donde esta constante es igual a la unidad cuando el grado del denominador es mayor que el grado delnumerador en la funcin de transferencia en lazo abierto. En conclusin, la transformacin del tramoABC (zona del recorrido de Nyquist trazada para s) no puede proporcionar rodeos al origen
porque implica un nico punto en el plano F(s). De este modo la transformacin de este tramo no debeconsiderarse en el anlisis del criterio de estabilidad de Nyquist.
- Transformacin del tramo CA. (s=j)
Como el tramo CA, es en definitiva el eje imaginario del plano S, en este caso:
1 1+ = +=G s H s G j H js j( ) ( ) ( ) ( ) (4.10)
Lo cual conlleva el estudio de la respuesta frecuencial del sistema en lazo abierto para < < . Apriori, esta representacin es fcil de realizar en el plano G j H j( ) ( ) , fig. 4.8. Aplicando unamodificacin en la observacin de los rodeos a origen en el plano 1+G j H j( ) ( ) , por rodeos alpunto -1+j0 en el plano G j H j( ) ( ) , pueden extraerse las mismas consideraciones. De este modo,puede afirmarse que la existencia de rodeos al punto -1+j0 por parte del diagrama polar en el planoG j H j( ) ( ) , implica la existencia de polos en el semiplano derecho del plano S en lazo cerrado, porlo que el sistema es inestable.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
8/55
-
8/14/2019 EE00304C
9/55
4. Anlisis frecuencial de sistemas de control 241
2) Hay uno o varios rodeos en sentido antihorario a -1+j0. En este caso el sistema en lazo cerrado esestable si el nmero de rodeos coincide con el nmero de polos en lazo abierto en semiplano derechodel plano S.
3) Hay uno o varios rodeos en sentido horario a -1+j0. El sistema lazo cerrado es inestable.
4.2.5 Existencia de singularidades en lazo abierto sobre el eje imaginarioCuando un sistema tiene polos en lazo abierto en el eje imaginario, es necesario modificar el recorridode Nyquist, debido a que el teorema de la representacin no puede aplicarse. El nuevo recorrido deNyquist considera todo el semiplano derecho del plano S, evitando las singularidades sobre el ejeimaginario, de modo que no deban contabilizarse en el parmetro P, tal y como muestra la figura 4.9.
s = e j 3Es = e j 6D
s = e -j3As = e -j6Bs = e j0C
j
Recorrido de Nyquist
s= e j
Fig. 4.9 Recorrido de Nyquist modificado.
La aparicin de singularidades sobre el eje imaginario conlleva arcos de radio infinito en el planotransformado, que debern considerarse en el estudio del nmero de rodeos al punto -1+j0 por partedel diagrama de Nyquist.
Ejemplo 4.1
Existe una estrecha relacin entre la estabilidad deducida mediante las tcnicas del lugar geomtricode las races y el criterio de estabilidad de Nyquist. Dado el sistema mostrado en la figura 4.10.
+- G(s)
C(s)R(s)
Fig. 4.10 Sistema realimentado.
donde0.
2 2
donde G s Ks
s( )
( )= +
1 23
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
10/55
Teora de control. Diseo electrnico242
a) Trazar el lugar geomtrico de las races determinando: LGR sobre eje real, asntotas, puntos deruptura y cortes del LGR con el eje imaginario. Determinar el rango de valores de K para el cual elsistema es estable.
b) Obtener eldiagrama polar del sistema en lazo abierto, descomponiendo, para ello, la respuestafrecuencial en lazo abierto en parte real e imaginaria, y determinando los valores para=0, 0.5, 1, 2,5, 10 y. Trazar eldiagrama de Nyquist . Para considerar el trayecto o recorrido de Nyquistmodificadoalrededor del origen en el plano S , realizar la transformacin de los puntos del plano Sque se muestran en la figura 4.11.
s = e j 3Es = e
j 6D
s = e -j3As = e -j6Bs = e j0C
j
Recorrido de Nyquist
s= e j
Fig.4.11 Recorrido de Nyquist modificado.
Determinar la estabilidad absoluta del sistema en lazo cerrado para K=0.25, 0.5 y 1, aplicando elcriterio de estabilidad de Nyquist.
c) Relacionar los resultados de los apartados a) y b). Razonar la respuesta.
Solucin:
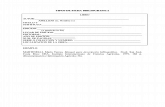
a) El Lugar Geomtrico de las races resultante puede observarse en la figura 4.12, donde nicamenteexiste una asntota que corresponde con el eje real y aparecen puntos de ruptura en s=-3, como puedecomprobarse:
Ks
sdKds
s s s s s K=
+
= + + = = =3
22 2 3
10 3 1 2 1 0 3
274( )
; ( ) ( )
Aplicando el algoritmo de Routh a la ecuacin caracterstica:
s K s K s K3 2 2 0+ + + =
donde0.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
11/55
4. Anlisis frecuencial de sistemas de control 243
El corte con el eje imaginario ocurre para: s j K= = 1 2 / . El sistema es estable para: K>1/2.
-5 -4 -3 -2 -1 0 1 2 3-3
-2
-1
0
1
2
3
Fig. 4.12 Lugar geomtrico de las races.
b) Diagrama polar:
G s Ks
sG j K
j j
K j
jK
jK( )( )
( )( )
= +
= +
=
+ +
= +1 1 1 2 2 12
3
2
3
2
3 2
2
3
[ ] [ ]Re ( ) ;Im ( )G jK
G j K
= =
2 1
2
2
3
A partir de estas expresiones puede realizarse la tabla 4.1.
Re(G(j)) Im(G(j))
=0 -
=0.5 -8K 6K
=1 -2K 0
=2 -K/2 -3K/8
=5 -2K/25 -24K/125
=10 -2K/100 -94K/1000
= -0 -0Tabla 4.1.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
12/55
Teora de control. Diseo electrnico244
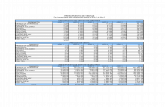
En la figura 4.13 puede observarse el diagrama polar. El diagrama de Nyquist se forma a partir deldiagrama polar realizando los rodeos en infinito adecuados, debido a la aparicin de un polo en lazoabierto en origen. Para ello, se realizan las transformaciones de los puntos (sA, sB, sC, sD y sE) que semuestra en el enunciado del problema.s e j=
G s Ke
eK
e j j
j( )
( )( )
= +
1 23
3
3 ya que 0
De este modo, se puede obtener la tabla 4.2.
Pto. Inicial Pto. Transformado
s eA j= 3 e j
s eB j
=
6 e j
2
s eC j= 0 e j0
s eD j= 6 e j
2
s eE j= 3 e j
Tabla 4.2.
-8 -7 -6 -5 -4 -3 -2 -1 0-6
-4
-2
0
2
4
6
Fig, 4.13 Diagrama de Nyquist para K=1 (lnea continua) y simtrico (lnea discontinua)
En conclusin, puede aplicarse el criterio de estabilidad de Nyquist resultando:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
13/55
4. Anlisis frecuencial de sistemas de control 245
* K=0.25. Corte del diagrama polar con el eje real en -0.5. N=2 y Z=N+P=2. Sistema inestable.
* K=0.5. Corte del diagrama polar con el eje real en -1. Sistema oscilatorio.
* K=1. Corte del diagrama polar con el eje real en -2. Z=N+P=-1+1=0. Sistema estable. Debeobservarse que en este caso existen dos rodeos (uno en sentido horario y otro en sentido antihorario).
c) Los resultados obtenidos mediante el lugar geomtrico de las races y mediante el diagrama deNyquist, deben ofrecer las mismas conclusiones respecto a la estabilidad del sistema en lazo cerrado.Por esta razn, el margen de valores de K para el cual el sistema es estable es el mismo en ambosmtodos.
4.3 Cuantificacin de la estabilidad relativa. Margen de Fase (MF) y Margen deGanancia (MG)
El criterio de estabilidad de Nyquist permite determinar la estabilidad absoluta de un sistema en lazocerrado, observando, para ello, la cantidad de races de la ecuacin caracterstica existentes ensemiplano derecho del plano S. Cuando el diagrama polar del sistema en lazo abierto contenga alpunto -1+j0 (ver figura 4.14), el criterio de estabilidad de Nyquist queda indeterminado. En estasituacin, existe una frecuencia para la cual la ecuacin caracterstica tiene una solucin de la formaGLA(jc)=-1, esto es, existe una raz en s=jc, lo cual implica que el sistema en lazo cerrado esoscilatorio.
=0=0
Im[(G(j )H(j )]
Re[(G(j )H(j )] -1+j0
Fig. 4.14 Diagrama polar contiene al punto -1+j0.
Para mostrar la propiedad anteriormente comentada, obsrvese, por ejemplo, el lugar geomtrico delas races (figura 4.15) y los diagramas de Nyquist (figura 4.16) del sistema:
G s ks s s
LA( )( ) ( ) ( )
=+ + +1 2 3
En estas grficas se comprueba como para k=60 el sistema es oscilatorio, para k=10 es estable y parak=200 el sistema es inestable.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
14/55
Teora de control. Diseo electrnico246
-6 -5 -4 -3 -2 -1 0 1 2 3 4-8
-6
-4
-2
0
2
4
6
8
Eje Real
Eje Imaginario
k=10
k=60
k=200
Fig. 4.15 Lugar geomtrico de las races.
-10 -5 0 5 10 15 20 25 30 35-25
-20
-15
-10
-5
0
5
10
15
20
25
Eje Real
Eje Imaginario
k=200
k=60
k=10
-5 -4 -3 -2 -1 0 1 2 3 4 5
-5
-4
-3
-2
-1
0
1
2
3
4
5
Eje Real
Eje Imaginario
k=10
k=60
k=200
Fig. 4.16 Diagramas de Nyquist para los valores k=10,60 y 200.
En sistemas de fase mnima, cuanto ms cerca se ubique el diagrama polar de GLA(j) del punto -1+j0, ms riesgo de inestabilidad presenta el sistema. De este modo, se puede utilizar la proximidad deGLA(j) al punto -1+j0 como una medida de la estabilidad relativa del sistema. Cuantitativamente sepuede definir la estabilidad relativa como una medida de la cercana del sistema a la inestabilidad. Lamedida del margen de fase y margen de ganancia permite determinar el grado de estabilidad relativadel sistema. As, cuando estos parmetros adquieren un valor elevado, el sistema se encuentra alejadode la inestabilidad y presentar una respuesta con un valor bajo de mximo sobreimpulso en sudinmica. El margen de fase y el margen de ganancia se definen:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
15/55
4. Anlisis frecuencial de sistemas de control 247
* Margen de fase: MF.
( )MF G jo LA t= + 180 ; donde ( ) ( ) t LA t LA tG j G j dB / log= =1 20 0dB (4.12)
dondet se denomina frecuencia de transicin del sistema y, como puede observarse en la expresin,se mide mediante la funcin de transferencia en lazo abierto.
Criterio:MF Sistema estable
MF Sistema in>
< 0
0 estable
De este modo, el margen de fase es la cantidad de fase que puede quitarse al sistema en lazo abiertopermaneciendo estable el sistema en lazo cerrado.
* Margen de ganancia: MG.
( ) ( )MG G j G jLA i LA i dB= = 1
20 MGdB log ; donde ( ) i LA i oG j / = 180 (4.13)
dondei es la frecuencia para la cual el sistema el lazo abierto adquiere 180o.
Criterio:MG MG Sistema estable
MG MG Sistema indB
dB
> > < <
1 0
1 0
dB
dB estable
( )
( )
De este modo, el margen de ganancia es la cantidad de ganancia que puede aadirse al sistema en lazoabierto permaneciendo estable el sistema en lazo cerrado.
-1.4 -1.2 -1 -0.8 -0.6 -0.4 -0.2 0-3
-2
-1
0
1
2
3
Eje Real
Eje Imaginario
G j MGi( ) < >1 1
i
tMF>0
Fig. 4.17 Medicin del margen de fase y el margen de ganancia en el diagrama polar para k=30.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
16/55
Teora de control. Diseo electrnico248
En las figuras 4.17-20 pueden observarse las mediciones del margen de fase y el margen de gananciaen el diagrama polar y el diagrama de Bode para diversos valores de k del sistema:
G sk
s s sLA( )
( ) ( ) ( )=
+ + +1 2 3
-3 -2.5 -2 -1.5 -1 -0.5 0-1.5
-1
-0.5
0
0.5
1
1.5
E e Real
Eje Imaginario
MF
-
8/14/2019 EE00304C
17/55
4. Anlisis frecuencial de sistemas de control 249
10-1
100
101
-40
-20
0
20
Frequency (rad/sec)
G a
i n d B
10-1
100
101
-250
-200
-150
-100
-50
Frequency (rad/sec)
P h a s e
d e g
-180
Fig. 4.20 Medicin del margen de fase y el margen de ganancia en el diagrama de Bode para k=15.
Ejemplo 4.2
Dado el sistema de la figura 4.21:
+-G(s)
C(s)R(s) Gc(s)
Fig. 4.21 Sistema de control.
donde: G ss s s
( )( ) ( )
= + +50
5 10y Gc(s) funcin de transferencia del control.
1.- Suponer un control Proporcional: Gc(s) = k.
1.1.- Calcular el valor dek para tener un error esttico de velocidad del 1 %.
1.2.- Determinar cul es el margen de fase del sistema con lak calculada en el apartado anterior eindicar la estabilidad absoluta del sistema.
MF>0
MG>0
i
t
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
18/55
Teora de control. Diseo electrnico250
2.- Para mejorar la estabilidad relativa del sistema se introduce un control proporcional derivativo:
Gc s k k s k a sp d( ) ( )= + = +1
2.1.- Qu valor debe tenerk para tener un error esttico de velocidad del 1%? Razonar larespuesta.
2.2.- Calcular la frecuencia de transicin (t) y el margen de fase del sistema compensado para loscasos: a = 1 y a = 0.2. Qu valor dea de los proporcionados tomara usted?. Razonar larespuesta.
2.3.- En la figura 4.22 se adjuntan las respuestas de los sistemas anteriores para una entrada enescaln. Indicar qu figura corresponde aa=1 y cual aa=0.2 . Razonar la respuesta.
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Tiempo (seg) Tiempo (seg)
0 0.2 0.4 0.6 0.8 10
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
Figura 1 Figura 2
Fig. 4.22 Respuestas al escaln de entrada para a=1 y a=0.2.
Solucin:
1.1.- Error estacionario de velocidad de 1%.
e 1k
k s G (s) s 50 ks (s+5) (s+10)
ssvv
v LA= = = = = lim lims s
k0 0
100 100
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
19/55
4. Anlisis frecuencial de sistemas de control 251
De este modo la funcin de transferencia de la planta resulta:
G (s) 100s (0.2s 1) (0.1s 1)
LA = + +
1.2.- Clculo del margen de fase.
* Clculo de la frecuencia de transicin:
Debemos expresar la respuesta frecuencial de la planta para poder realizar el diagrama de Bode:
10-1
100
101
102
-250
-200
-150
-100
Frecuencia (rad/seg)
Fase (grados)
10 -1 100
101
102
-50
0
50
Frecuencia (rad/seg)
Mdulo (dB)
Fig. 4.23 Diagrama de Bode de la planta.
[ ]
G (j ) 20 log 100 20 log 20 log j5
1 20 log j10
1
FASE G (j ) arctg5
arctg10
LA dB
LA
= + +
= 90o
De este modo, a partir del diagrama de Bode podemos calcular:
20 log 100 G (j ) 20 log51
G (j ) 26dB; 14dB dB10
LA dB5
LA dB = = = == =
5
0 60 log 17 113t t .
Obsrvese que de 5 a 10 rad/seg existe una octava a -40 dB/dec.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
20/55
Teora de control. Diseo electrnico252
* Clculo del margen de fase:
[ ] [ ]FASE G (j ) arctg arctg 223.4 MFo 180 FASE G (j ) LA LA t o t t t= = = + = 90 5 10 434.
El margen de fase del sistema resulta negativo y por ello podemos decir que el sistema es inestable.
2.1.- La accin derivativa del control proporcional derivativo no afecta al estado estacionario delsistema, por ello k debe tener el mismo valor que en el apartado anterior para garantizar el mismoerror esttico, as k=100.
2.2.- Cuando a = 1:
G (s) 100 (s+1)s (0.2s 1) (0.1s 1)
LA = + +
10-1
100
101
102
-150
-100
-50
0
Frecuencia (rad/seg)
Fase (grados)
10-1
100
101
102
0
20
40
60
Frecuencia (rad/seg)
Mdulo (dB)
-180
Fig. 4.24 Diagrama de Bode con a=1.
Frecuencia de transicin y margen de fase:
G (j ) dB dB 10 rad / segLA dB
= = = =10 40 6 34 0 40 log 70 8dB dBt
t .
Obsrvese que de 5 a 10 rad/seg existe una octava a -20 dB/dec.
[ ] [ ]FASE G (j ) arctg arctg MFo 180 FASE G (j ) LA LA t o t t t t= + = = + =90 5 10 168 73 1127arctg . .
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
21/55
4. Anlisis frecuencial de sistemas de control 253
Cuando a=0.2:
G (s) 100 (0.2s +1)s (0.2s 1) (0.1s 1)
G (s) 100s (0.1s 1)
LA LA= + + = +
10-1
100
101
102
-180
-160
-140
-120
-100
Frecuencia (rad/seg)
Fase (grados)
10-1
100
101
102
-20
0
20
40
60
Frecuencia (rad/seg)
Mdulo (dB)
Fig. 4.25 Diagrama de Bode con a=0.2.
Frecuencia de transicin y margen de fase:
G (j ) dB dB10
rad / segLA dB =
= = = =10
40 20 20 20 0 40 log 3162dB dB dB t t .
[ ] [ ]FASE G (j ) arctg MFo 180 FASE G (j ) LA LA t o t t tarctg= + = = + =90 10 162 45 17 55. .
Debemos escoger aquel valor dea que nos proporcione mayor estabilidad relativa, esto es, mayormargen de fase, por ello se considera a = 0.2.
2.3.- El margen de fase est directamente relacionado con la estabilidad relativa, lo cual, visto desde el
punto de vista temporal, implica menor sobreimpulso de la seal amortiguada; de este modo, larespuesta temporal de mayor sobreimpulso (Figura 2) corresponde con el sistema de menor margen defase, esto es, a = 1. La frecuencia de transicin est relacionada con el ancho de banda en lazo cerradoy con la velocidad de respuesta; as, el sistema de a = 1 responde con una frecuencia amortiguadamayor que el sistema de a = 0.2 (Figura 1) porque su frecuencia de transicin es mayor.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
22/55
Teora de control. Diseo electrnico254
4.4 Respuesta frecuencial de sistemas de tiempo discreto
Dado el sistema discreto de la figura 4.26:
G(z) E(z) C(z)
Fig, 4.26 Sistema realimentado de tiempo discreto.
donde: [ ]( ) ( )
E z Z tz T
z e z e j T j T( ) sen( )
sen( )= =
En el sistema definido, se obtiene el rgimen permanente senoidal considerando la respuesta delsistema estable cuando el tiempo tiende a infinito y se posee una seal de entrada senoidal.
( ) ( )C z G z z T
z e z e j T j T( ) ( ) sen( )=
(4.14)
Para obtener la antitransformada Z debe desarrollarse C(z) en fracciones parciales.
( ) ( )C z
k zz e
k zz e
Cg z j T j T( ) ( )= +
+
1 2 (4.15)
Los dos primeros trminos del desarrollo son originados por las races de la transformada Z de la sealsenoidal muestreada, mientras que Cg(z) contiene los trminos debidos a los polos de G(z). Dado queel RPS nicamente existe en sistemas estables:
[ ]Z Cg z cg kT) = 1 0( ) ( cuando k .
Denominando Css(z) a la transformada Z de la seal que perdura cuando el tiempo crezcainfinitamente (estado estacionario):
( ) ( )Css z
k zz e
k zz e j T j T
( ) =
+
1 2 (4.16)
Clculo de los residuos:
( ) ( ) ( )k C zz e
z
G e
j
G e
j
j T
z e
j T j T
j T
1 22 2=
= =
=
( ) ;
k (4.17)
Debe observarse que ( )G e G z j T z e j T = =( ) es la respuesta frecuencial del sistema discreto; esto es,debe evaluarse la funcin de transferencia en Z en un punto del plano ubicado sobre el crculo de radio
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
23/55
4. Anlisis frecuencial de sistemas de control 255
unidad y con faseT respecto a origen, donde existe una dependencia respecto a la seal de entrada.Obviamente, la evaluacin de la funcin planteada en plano Z resulta difcil, debido a que no puedenutilizarse tcnicas asintticas para resolverla.
A partir de la descripcin del procedimiento de clculo puede indicarse que( )G e j T es una funcinde variable compleja, y verifica:
( ) ( ) ( )G e G e e j T j T j G e j T = (4.18)
( ) ( ) ( ) ( ) ( )G e G e e G e e j T j T j G e j T j G e j T j T = =
(4.19)
Realizando la antitransformada de la ecuacin de Css(z) se obtiene:
( ) ( )C kT k e k ess j T k j T k( ) = + 1 2 (4.20)
Sustituyendo las expresiones de k1 y k2:
( )( )( ) ( )( )
( ) ( )( )Css kT G e e e j G e kT G e j T
j kT G e j kT G e j T j T
j T j T
( ) sen= = + + +
2
(4.21)
En conclusin, la respuesta de un sistema discreto en RPS es una seal senoidal con igual frecuenciaque la seal de entrada, con amplitud igual al producto de la amplitud de entrada por el mdulo de larespuesta frecuencial y con fase igual a la suma de fases de la seal de entrada y la fase de su
respuesta frecuencial. De este modo, no es necesario realizar la antitransformada Z para determinarcul es la salida de un sistema discreto estable en RPS.
Ejemplo 4.3
Considrese el sistema definido por :
x(KT) = U(KT) + a x((K-1)T) 0
-
8/14/2019 EE00304C
24/55
Teora de control. Diseo electrnico256
G ea e a T j a sin T
j T j T( ) cos
=
= +
11
11
G e M a a T j T
( ) cos = = +
1
1 22
{ }fase G e a sin Ta T
j T( ) arctgcos
= =
1
Xss(KT)=A M sin(K T+)
4.4.1 Caractersticas de la respuesta frecuencialExisten importantes diferencias entre la respuesta frecuencial de un sistema de tiempo continuo y larespuesta frecuencial de un sistema de tiempo discreto; entre estas consideraciones a tener en cuenta,destacan:
1- Es peridica de periodos, dado el efecto de bandas repetidas en plano S que se produce en unsistema muestreado. As, en conclusin, la respuesta frecuencial no debe evaluarse, en general, enplano Z, debido a que se realizarn mltiples vueltas sobre el crculo de radio unidad en plano Z amedida que aumente la frecuencia de la seal de entrada.
2- La respuesta frecuencial trazada en plano transformado bilineal (W) no ser peridica, debido a quenicamente contiene la informacin de la banda primaria del sistema discreto en plano S. Sinembargo, esta sentencia no es muy importante, dado que, en su funcionamiento correcto, el sistemadiscreto utilizar seales que verificarn el teorema de Shannon. Ello conlleva un anlisis detallado dela evaluacin de la respuesta frecuencial mediante la transformada bilineal, debido a que la
informacin aparece con una distorsin en el eje frecuencial; en conclusin, deber considerarse larelacin no lineal existente entre la frecuencia bilineal y la frecuencia real de la seal.
3- Aplicando la transformada bilineal:
G w G z G j G wzT
wT
w
w w j w( ) ( ) ( ) ( )= ==+
=
1 21 2
, pueden trazarse mediante mtodos asintticos los
diagramas de Bode de G j G jw w( ) ( ) y , que ofrecen la informacin de la respuesta frecuencialevaluada sobre la banda primaria, considerando:
=
=
22
22
1T
TT
Twwtg tg (4.22)
Cuando el nmero de muestras por ciclo sea elevado, el sistema continuo equivalente tendr undiagrama de Bode similar, sin distorsin, al sistema discreto. Sin embargo, a medida que aumenta lafrecuencia de la seal de entrada, el nmero de muestras por ciclo disminuye, observndose
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
25/55
4. Anlisis frecuencial de sistemas de control 257
diferencias entre los diagramas de Bode del sistema continuo y del sistema discreto obtenido mediantela transformada bilineal.
A partir del diagrama de Bode, puede trazarse el diagrama polar de un sistema discreto, y de este
modo es posible aplicar el criterio de estabilidad de Nyquist. Debe observarse que la distorsin sufridaen la transformacin de frecuencias no es relevante en el diagrama polar, determinndose laestabilidad absoluta y relativa del sistema discreto sin ninguna consideracin adicional, es decir, sinnecesidad de conocer el nmero de muestras por ciclo de la seal de salida. En conclusin, podrndefinirse los conceptos de margen de fase (MF) y margen de ganancia (MG) en el plano transformadobilineal (W), anlogamente a como ocurra en sistemas de tiempo continuo.
Si garantizamos frecuencialmente una buena estabilidad relativa, el sistema discreto responderadecuadamente, con independencia del n de muestras/ciclo y del n de muestras/cte. de tiempo. En eldiseo en el dominio temporal, estos parmetros deban observarse para garantizar una buenadescripcin de la respuesta del sistema discreto.
Ejemplo 4.4
Dado el sistema de la figura 4.27:
Gp(s)
PLANTA
Goh(s)
ZOH
T
Fig. 4.27 Sistema discreto en lazo abierto.
donde:( )
Goh s es
ss
Ts( ) ; ( ) ;= = +
1 1010
Gp G(s) = Goh(s) Gp(s)
Se pide:
1.1- Con T=0.01 seg. encontrar la transformada bilineal de G(s){G(w)}.
1.2.- Comparar los polos y ceros, as como la ganancia en continua (para w=0, s=0) de la funcinG(w) con los de la funcin Gp(s).
1.3.- Queda distorsionado el diagrama de Bode de la funcin de transferencia G(w) respecto aldiagrama de Bode de Gp(s) a bajas frecuencias? Razonar la respuesta.
2.1.- Con T=1 seg. encontrar la transformada bilineal de G(s){G(w)}.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
26/55
Teora de control. Diseo electrnico258
2.2.- Comparar los polos y ceros, as como la ganancia en continua (para w=0, s=0) de la funcinG(w) con los de la funcin Gp(s).
2.3.- Queda distorsionado el diagrama de Bode de la funcin de transferencia G(w) respecto aldiagrama de Bode de Gp(s) a bajas frecuencias?. Razonar la respuesta.
Dado el sistema en lazo cerrado de la figura 4.28:
Gp(s)R(s) C(s)+ -
PLANTA
Goh(s)
ZOH
T
Fig. 4.28 Sistema de control discreto en lazo cerrado.
3.- Encontrar la funcin de transferencia C(s)/R(s) del sistema continuo, eliminando el muestreador yel mantenedor de datos.
4.- Calcular el nmero de muestras por constante de tiempo del sistema del apartado anterior si semuestrea la seal de salida con un periodo de T=0.01 seg. Y con T=1 seg.? Relacionar losresultados obtenidos con los apartados 1 y 2.
5.- Encontrar la funcin de transferencia C(z)/R(z) para T=0.01 seg. y para T=1 seg. Trazar losdiagramas polos-ceros en lazo cerrado (en ambos casos) y razonar los resultados, relacionndoloscon los obtenidos en los apartados anteriores.
Solucin:
1.- Para T = 0.01
[ ] [ ]G z z Z s s z w ww
ww= + = = +
= +
( ) ( ).
..
.
. .
. ( . ). .1
1010
0095209048
009521 0 0051 0 005 09048
0 0952 1 0 00500952 00095
1 ; G
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
27/55
4. Anlisis frecuencial de sistemas de control 259
Ambas respuestas frecuenciales mantienen la misma posicin respecto a sus polos y ganancia encontinua. Pero la funcin G[w] tiene un cero finito ms, aunque est situado muy a la derecha, esdecir a altas frecuencias, y por tanto el diagrama de Bode no queda distorsionado a bajas frecuencias.2.- Para T = 1
[ ] [ ]G z z Z s s zw w
w
ww
= + = = +
= +
( )( ) .
; ..
.
.
.1 10
101
453 101
1 051 05
453 10
1 051 05
15 5
G
[ ]G w :polo en w = -2cero en w = 2
El cero que se introduce se sita sobre el polo produciendo una cancelacin cero-polo en el mdulo dela respuesta frecuencial, dando lugar a un diagrama de Bode plano en mdulo y una variacin de faseasintticamente a -180 grados. Con lo cual s que se distorsiona el diagrama de Bode.
3.- Diagrama de bloques del sistema continuo:
Gp(s)R(s) C(s)
+-
C sR s s
( )( )
=+10
20
4.- Cte. de tiempo =120
= 0.01
Tas por cte. de tiempo
Para T = 1T
ras por cte. de tiempo
= = =
= =0 05
0 05
0 015 muestr
0 051
0 05 muest. ;
.
...
Para T
Para T = 1 no tenemos ni una muestra por cte. de tiempo y por eso se distorsiona la transformadabilineal.
10G s
sp( ) = +
1010
[ ]G w ww=
+0 0952 1 0 00500952 00095. ( . ). .
10 200
-26.02
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
28/55
Teora de control. Diseo electrnico260
Para T = 0.01 el nmero de muestras es suficiente y la transformada bilineal no queda distorsionada.
5.-
[ ][ ]
[ ][ ]
[ ][ ]
[ ][ ]
T
T
C zR z
G zG z
C zR z z
C zR z z
= +
= =
= = +1
0 01 0095208096
1 11
;. .
.
La zona donde deberan ubicarse los polos para garantizar una buena simulacin anloga equivalentees aquella que rodea al punto z=1 en el interior del crculo de radio unidad.
* Para T = 0.01 polo z = 0.809 Se sita dentro de la zona.
Para T = 1 polo z = -1 Se sita fuera de la zona, y por esto el sistema continuo anlogo
queda distorsionado.
4.5 Problemas
Problema 1
La ecuacin del controlador PID analgico es:
m t K e tT
e t dt T de tdti
td( ) ( ) ( )
( )= + + 1 0
donde e(t) es la entrada al controlador (seal de error) y m(t) es la salida del controlador (seal decontrol).
La funcin de transferencia del PID analgico es:
G s M sE s
KT s
T si
d( )( )( )= = + +
1 1
La funcin de transferencia del PID digital es:
[ ] [ ][ ] ( )G zM zE z
K Kz
K zD P I D= = + +
1
111 donde K K KIP =
12
Se desea comparar el diagrama polar del controlador PID analgico con el controlador PID digital.Para ello realizar los siguientes diagramas polares para los casos:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
29/55
4. Anlisis frecuencial de sistemas de control 261
1. Accin P analgica y accin P digital.
2. Accin I analgica y accin I digital.
3. Accin PI analgica y accin PI digital.
4. Accin D analgica y accin D digital.
5. Accin PID analgica y accin PID digital.
Son todas las acciones analgicas y digitales equivalentes?. Es por tanto el PID analgico totalmenteequivalente al PID digital?. Razonar las respuestas.
Nota:
DibujarTODOS los diagramas polares en funcin de la frecuencia real . Para los diagramas polares de los controles digitales dibujar hasta la mxima frecuencia que no
presentaaliasing , sabiendo que el periodo de muestreo es T.
Solucin:
Para dibujar los diagramas polares calculamos:
G j KT
T ji
d( ) =
1
1
( ) ( )G e K K j T)T) K T) j T)D j t
PI
D
= +
+ 2
11
1sin(cos(
cos( sin(
La mxima frecuencia a la que no se producealiasing , segn el teorema del muestreo, es: max = T
1. Accin P analgico:
Re
Im
K
G j KP( ) =
2. Accin I analgico:
Re
Im
G j KT
jIi
( )
=
1
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
30/55
Teora de control. Diseo electrnico262
= = = =
00
G jG j
P
P
( )( )
3. Accin PI analgico:
Re
Im
K
Coincide con la suma de las dos grficas anteriores.
G j KT
jPI i
( ) =
1 1
4. Accin D analgico:
Re
Im
G j K T jD d( ) =
= == =
0 0G jG j
D
D
( )( )
5. Accin PID analgico:
Re
Im
K
Ser la suma de las grficas que contienen las acciones PI+D.
1. Accin P digital:
Re
Im
KP
( )G e KD j t PP =
K K KP I= 12
2. Accin I digital:
Re
Im
KI2
( )G e K j T)T)D j t I
I
=
2
11
sin(cos(
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
31/55
4. Anlisis frecuencial de sistemas de control 263
= =
= =
0
2
G j
TG j K
D
DI
I
I
( )
( )
3. Accin PI digital:
Re
Im
K
( )G e K K j T)T)DPI j t
PI
= +
2
11
sin(cos(
K K KP I= 12
( )G e K j K sin TTDPI
j t I
= 2 1
( )cos( )
4. Accin D digital:
Re
Im
2KD
( ) ( )G e K T) j T)DD j t D = 1 cos( sin(
= == =
0 0
2
G j
TG j K
D
D D
D
D
( )
( )
5. Accin PID digital:
Re
Im
KK+2KD
Coincide con la suma de las grficas PI+D
Problema 2
El convertidor digital-analgico"D/A Linear-Interpolator hold circuit" , cuyo esquema circuital sepresenta en la figura 1, ofrece mayor atenuacin dea los armnicos de alta frecuencia que elconvertidor digital-analgico ms usual, Mantenedor de Orden Cero (ZOH).
Figura 1
ZOH
TC
R Seal Anal ica
RC=T
G s esoh
Ts( ) =
1Seal
Discreta
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
32/55
Teora de control. Diseo electrnico264
La funcin de transferencia ideal del convertidor digital-analgico"D/A Linear-Interpolator hold circuit" es:
( )G s
e
T s
Ts
( ) = 1
2
2
En algunas aplicaciones prcticas el convertidor digital-analgico "D/A Linear-Interpolator hold circuit" se aproxima por un circuito ms simple utilizando la tcnica de"Oversampling" . En la figura2 se puede observar un esquema circuital de este tipo de convertidor digital-analgico.
Figura 2
1.- Demostrar que la funcin de transferencia entrada-salida de un convertidor digital-analgico"D/A Linear-Interpolator hold circuit" utilizando la citada tcnica de"Oversampling" es:
G z zz
o( ) = +34
2.- Se desea demostrar que la tcnica de"Oversampling" utilizada ofrece una buena aproximacin delconversor digital-analgico"D/A Linear-Interpolator hold circuit" , para ello obtener la respuestamuestreada de los sistemas de la figura 3:
G(s)r(t)=A. sen(t)
D/A Linear-Interpolator hold circuit sin Oversampling
c(t)
Go(s)r(t)=A. sen(t)
D/A Linear-Interpolator hold circuit con Oversampling
(t)oc
T
T
Figura 3
ZOHe -(T/4)s
Seal
Analgica
Goh(s)=1-e-Ts
s
Seal Discreta
R
4R
ZOHe -(T/2)s4R
ZOH4R
ZOHe -(3T/4)s4R
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
33/55
4. Anlisis frecuencial de sistemas de control 265
Obtener la respuesta para los casos:
=28 T
=2
16 T
Calcular para cada uno de los sistemas:
El nmero de muestras por ciclo de la seal senoidal. El desfase entre las senoides de entrada y salida en los dos casos anteriores. Para cual de las dos frecuencias utilizadas se obtiene mejor aproximacin? Razonar la
respuesta.
3.- Para mejorar el rango de validez de la aproximacin considrese un filtrado posterior como semuestra en la figura 4:
Go(s)r(t)=A sen(t)
D/A Linear-Interpolator hold circuit con Oversampling
T
Filtro
Gf (z)
=T8
cf (t)F(s
s) = +
11
Figura 4
3.1.- Calcular Gf(z).
3.2.- Sabiendo que la transformada bilineal de Gf(z) es:
Gf w
T wT w
T wT w
( )( )
( )
( . )
( )=
+
+
+
14
12
12
3 68842 42
12
Calcular de nuevo el desfase obtenido en la seal de salida para las mismas frecuencias de loscasos anteriores. Comparar los resultados obtenidos, qu conclusin puede obtenerse delejercicio? Razonar la respuesta.
Solucin
1.- Observando el esquema circuital de la figura 2 puede obtenerse fcilmente la siguiente relacinentrada-salida:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
34/55
Teora de control. Diseo electrnico266
C sR s
es
e e eTs Ts Ts Ts( )
( )( )= + + +
14
1 1 4 234
Aplicando transformada Z:
G z C zR z
z Z e e es
o
Ts Ts Ts
( ) ( )( )
( )= = + + +
14
1 114 2
34
El clculo de la transformada Z modificada se reduce a:
Z e
sZm
s z
Ts= =
4 1 1
1con m=1-=3/4
Anlogamente ocurre en el resto de los casos.
En conclusin, se obtiene como resultado:
G zC zR z z
zz zo( )
( )( ) ( )= = +
14 1 1
31
1 G zz
zo( ) =+3
4
2.- Respuesta muestreada del D/A Linear-Interpolator hold circuit sinOversampling :
Conocemos:( )
G se
T s
Ts
( ) = 1
2
2
Aplicando transformada Z:
( ) ( )( )
G zz
TZ
s
z
TT z
z z( ) =
=
=
1 1 1
11
1 2
2
1 2
2
Aplicando transformada bilineal:
G w
T w
T w( ) =
+
12
12
G j jT
jTw
w
w( )
=
+
12
12
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
35/55
-
8/14/2019 EE00304C
36/55
Teora de control. Diseo electrnico268
donde: G j arctg T arctg To w w w( ) ( ) ( ) = 2 4
Desfase entre la senoide de entrada y la senoide de salida:
= = = 28 8 16 3254T G j arctg arctgo wo( ) ( ) ( ) .
= = = 216 16 32
1671T
G j arctg arctgo w o( ) ( ) ( ) .
Conclusin:
Conforme aumenta el nmero de muestras por ciclo, la aproximacin mejora. De hecho, laaproximacin es vlida a partir del nmero de muestras necesarias para reproducir con fidelidad laseal de entrada al conversor digital-analgico.
3.1.- Clculo de Gf (z):
Anlogamente al apartado 1, la expresin de la transformada Z de la relacin entrada-salida es:
( )G z z Z e e e
s sf
Ts Ts Ts
( ) ( )= + + + +
14
1 11
1 4 234
( )( )
Zs s
z e
z z e
T
T1
1
1
1 +
=
( ) ( )( )
Z es s
Zms s z
e
z e
e z e e
z z e
T s m T
T
m T m T T
T
+ = + =
=
+
4
11
11
1
1
1
donde m=1-=3/4
Realizando clculos anlogos para los restantes casos y considerando=T/8 se obtiene:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
37/55
4. Anlisis frecuencial de sistemas de control 269
( ) ( )[ ]G z
z z ee e e e z e e e ef ( ) =
+ + +
14
1 4 38
8 4 2 6 2 4 6 8
G z zz z
f ( ) . .( . )
=
14 384355 0 15512333546 10 4
3.2.- Desfase obtenido en esta situacin:
Conociendo la transformada bilineal de Gf (z) puede obtenerse el desfase mediante la expresin:
G j arctg T arctg Tf w w w( ) ( ) ( .) = + 3 2 2
4368842
= = + = 28 3 8 2 368842 4125T G j arctg arctgf wo( ) ( ) (
.) .
= = + = 216
316 4 368842
213T
G j arctg arctgf w o( ) ( ) ( .) .
En conclusin, el filtro aade el desfase necesario para mejorar la aproximacin.
Problema 3
Las funciones de transferencia de muchos procesos contienen uno o ms pares de polos complejo-conjugados muy cercanos al eje imaginario del plano S. Estos sistemas presentan una relacin deamortiguamiento muy pequea y, por esta razn, se denominan sistemas con resonancia estructural.Esta caracterstica provoca la utilizacin de nuevas estructuras controladoras.
Dado el sistema de control de la figura 1, se pretende estudiar el efecto de la resonancia estructuralsobre la dinmica resultante. Para ello, resuelva:
Gc(s) G p (s)
+
-
CONTROL PLANTA
Figura 1
a) Suponiendo un control proporcional obtener el lugar geomtrico de las races calculando:
1- El lugar geomtrico de las races sobre eje real.
2- ngulos de las asntotas y el punto de interseccin de las mismas con el eje real.
3- Puntos de corte del lugar geomtrico de las races con el eje imaginario.
G s ss s s
p( )( ) ( . )
= ++ + +
751 012 92
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
38/55
Teora de control. Diseo electrnico270
4- ngulos de arranque.
Observando el trazado del lugar geomtrico de las races razonar el efecto de la resonancia estructuralsobre la dinmica del sistema en lazo cerrado.
Para evitar el efecto anterior se aade en cascada a la planta la red electrnica que se muestra en lafigura 2 para formar el sistema de control de la figura 3.
+
-
Ei
+
-
Eo
Figura 2
Gc (s) G p (s)
+
-
CONTROL PLANTARED ELECTRONICA
Gc (s)1 2
Figura 3
La funcin de transferencia de la red electrnica es:
G s E sE s
s ss s
coi
z nz nz
p np np2
2 2
2 222
( ) ( )( )= =
+ ++ +
donde:
np nz
pz
z
=
= + 1 22
2
b) Disear la red electrnica anterior de manera que cancele la resonancia estructural de la planta.
Suponiendo un control proporcional, obtener el lugar geomtrico de las races calculando los pasos 1 y2 del apartado a).
Razonar las ventajas que proporciona la utilizacin de este tipo de estructura controladora.
c) Disear un control proporcional integral derivativo para eliminar el error estacionario de posicin ylograr unas especificaciones de respuesta transitoria de tiempo de establecimiento de 4 segundos ymximo sobreimpulso del 20 %.
G s ks a s b
sc1( )
( ) ( )=
+ +Considrese b=0.06.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
39/55
4. Anlisis frecuencial de sistemas de control 271
Para finalizar el anlisis, estudiar el efecto sobre la respuesta frecuencial de la red electrnicadiseada, para ello:
d) Trazar el diagrama de Bode asinttico en mdulo y fase de la red electrnica diseada.
En la figura 4 se muestra el diagrama de Bode en mdulo y fase de la planta.
e) Determinar la frecuencia de transicin, el margen de fase y el margen de ganancia del sistema sinred electrnica ni control proporcional integral derivativo. Cul es el efecto cualitativo de la adicinde la red electrnica sobre el margen de fase y el margen de ganancia? Razonar la respuesta.
10-1
100
101
102
-60
-40
-20
0
20
40
Frecuencia (rad/seg.)
10-1
100
101
102
-250
-200
-150
-100
-50
Fase (grados)
Figura 4
Solucin:
a) Lugar geomtrico de las races:
La funcin de transferencia en lazo abierto es:
G s s
s s sp( )
( ) ( . )= +
+ + +
75
1 012 92que posee races en:
s
s
s j
c
p
p
=
=
=
75
1
0 06 31 2, .
Los ngulos de las asntotas son de90o y el punto de interseccin de las mismas con el eje real es:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
40/55
Teora de control. Diseo electrnico272
a = + =1 2 0 06 752
3694. .
Debe observarse que este punto se encuentra en semiplano derecho en el plano transformado deLaplace.
La interseccin del lugar geomtrico de las races con el eje imaginario ocurre para el valor deganancia que proporciona estabilidad lmite; de este modo, aplicando el algoritmo de Routh sobre laecuacin caracterstica:
( ) ( . ) ( ) . ( . )s s s k s s s k s k+ + + + + = + + + + + =1 012 9 75 0 112 912 75 9 02 3 2
s
s
s
s
k
k
k k s j
k
3
2
1
0
1 2
1 912
112 75 9
7388 12144112
0 0164375 3022
75 9
.
.
. ..
. .,
+
+
+ = =
+
Los ngulos de arranque son todos conocidos exceptuando los correspondientes a las races complejo-conjugadas, para este caso:
arct arct o o o375 0 06
31 0 06
90 180 19 7
= =. .
.
En la siguiente figura se muestra el lugar geomtrico resultante.
-80 -70 -60 -50 -40 -30 -20 -10 0 10 20-10
-8
-6
-4
-2
0
2
4
6
8
10
Eje Real
Eje Imaginario Lugar Geomtrico de las Races de la Planta
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
41/55
4. Anlisis frecuencial de sistemas de control 273
A partir del lugar geomtrico puede afirmarse que, debido a la proximidad de las races complejo-conjugadas al eje imaginario, el sistema en lazo cerrado entra en la inestabilidad para valores de k muypequeos; el diseo de estructuras de control partiendo de este tipo de plantas conlleva la cancelacinde estas races complejo-conjugadas previas al diseo de la estructura controladora.
b) Para cancelar la resonancia estructural, deben igualarse los ceros de la red electrnica con los poloscomplejo-conjugados de la planta; a su vez, los polos de la red electrnica aparecern como resultadode la aplicacin de las expresiones que ofrece la propia red.
G s E sE s
s ss s
coi p np np
22
2 2012 9
2( ) ( )
( ).= = + +
+ + donde:
np nz
pz
z
= =
= + = + =
3
1 22
1 2 0 022 0 02
25022 2.
..
G s s s
s s
s s
s sc2
2
2
2012 9
15012 9
012 9
0 06 150 06( ) .
.
.
( . ) ( . )= + +
+ += + +
+ +de este modo la funcin de transferencia en lazo abierto final resulta:
G s G s G s ss s s
T p c( ) ( ) ( )( . ) ( ) ( . )
= = ++ + +2
750 06 1 150 06
Para trazar el nuevo lugar geomtrico de las races es necesario determinar el lugar geomtrico sobreel eje real y las asntotas:
-200 -150 -100 -50 0 50150
100
-50
0
50
100
150
Eje Real
Eje Imag. Lugar Geomtrico de las Races del Sistema con
Los ngulos de las asntotas son de90o y el punto de interseccin de las mismas con el eje real es:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
42/55
Teora de control. Diseo electrnico274
a = + = 1 0 06 150 06 752
3806. . .
Debe observarse que este punto se encuentra en semiplano izquierdo en el plano transformado deLaplace. Dado que el sistema debe tener un punto de ruptura ubicado entre las races s=-0.06 y s=-1,segn las caractersticas obtenidas de la asntotas, puede afirmarse que el sistema en lazo cerrado essiempre estable (rigurosamente, es necesario determinar la no existencia de puntos de interseccin dellugar geomtrico de las races con el eje imaginario, pero dado que el punto de interseccin de lasraces con el eje real se encuentra muy alejado del punto de ruptura, puede suponerse que estacondicin se verifica).
c) Diseo del control proporcional integral derivativo.
G s k s a s bs
c1( ) ( ) ( )= + + b=0.06.
Segn las especificaciones de diseo:
ts = = =4 4 1 seg Mp e d d= = = / . .0 2 1952
La funcin de transferencia en lazo abierto resulta:
G s G s G s G s k s a ss s s
T p c c( ) ( ) ( ) ( ) ( ) ( )( ) ( . )
= = + + + +
2 175
1 150 06
Efectuando el diseo en el plano transformado de Laplace mediante la imposicin de las condicionesde ngulo y mdulo sobre los puntos deseados se obtiene:
arctga
arctg arctg arctgo o o19521
195275 1
1952150 06 1
90 180 19521
180. . ..
. + + = ; a=4.938
kk + +
+ += =
( . ) . ( ) .
. . ( . ) ..
4 938 1 1952 75 1 1952
1952 1 1952 150 06 1 19521 19615
2 2 2 2
2 2 2
Control PID diseado: G s s ss
c1 19615 0 06 4 938( ) . ( . ) ( . )= + +
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
43/55
4. Anlisis frecuencial de sistemas de control 275
10 -2 10 -1 10 0 10 1 10 2 10 3-100
-50
0
50
100
Frecuencia (rad/seg.)
Fase (grados)
10 -2 10 -1 10 0 10 1 10 2 10 3-80
-60
-40
-20
0
Frecuencia (rad/seg.)
Mdulo (db) Diagrama de Bode del Corrector
d) La figura anterior muestra el diagrama de Bode en mdulo y fase de la red electrnica diseadapara cancelar la resonancia estructural de la planta (debe observarse que se han trazado diagramasasintticos y reales).
e) Observando el diagrama de Bode en mdulo y fase de la planta, pueden determinarse grficamente
los valores del margen de fase y el margen de ganancia del sistema sin la red electrnica ni el controldiseado, obteniendo:
Frecuencia de transicin:t =5 rad / seg
Margen de fase:MF o o o= = 180 250 70
Margen de ganancia:MG i= =35 dB dete 3 radrminados en / seg
Debe observarse el efecto desestabilizador de la resonancia estructural que provoca una disminucinde ms de 120o en fase y un aumento de 30 dB en el mdulo de la respuesta frecuencial en lazo
abierto. La red electrnica aadida al sistema compensa este efecto desestabilizador aadiendo fase yreduciendo mdulo en la frecuencia de resonancia; de este modo, aumenta el margen de fase y elmargen de ganancia total.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
44/55
Teora de control. Diseo electrnico276
Problema 4
Los sistemas de fase mnima son aquellos que poseen algn polo o cero de su funcin de transferenciaen el semiplano derecho del plano S. Suponer el siguiente sistema en lazo cerrado:
+- G(s)
C(s)R(s)
donde: G ss a
s s b( )
( )( )=+
+
Se pretende estudiar la estabilidad del sistema en lazo cerrado segn la ubicacin de sussingularidades. Analizar los siguientes casos:
1. a = -1; b = 1
2. a = 1; b = 1
3. a = 1; b = -1
Para ello, realizar los siguientes apartados en cada uno de los casos:
a) Obtener la respuesta frecuencial del sistema y descomponerla en la forma:[ ] [ ]G j G j j G j( ) Re ( ) Im ( ) = +
b) Calcular la siguiente tabla:
[ ]Re ( )G j [ ]Im ( )G j0
0.1110
c) Dibujar el diagrama polar utilizando los valores calculados anteriormente.
d) Dibujar el diagrama de Nyquist (-
-
8/14/2019 EE00304C
45/55
4. Anlisis frecuencial de sistemas de control 277
g) Comparando los resultados de margen de fase y margen de ganancia con el resultado de aplicar elcriterio de Nyquist, qu conclusin obtiene de esta comparacin? Razonar la respuesta.
h) Como vara la estabilidad en lazo cerrado si la ganancia en continua del sistema en lazo abierto
aumenta? Qu conclusin obtiene de este apartado? Razonar la respuesta. Nota: Utilizar el lugar geomtrico de las races (de forma aproximada) si lo considera necesario.
Solucin :
* Caso 1:G ss
s s( )( )( )=
+11
a) Respuesta frecuencial:
( )( )
G j j j j j( ) ( )( )
= + =+
+1
12 1
1
2
2 ; [ ] [ ]G j G j j G j( ) Re ( ) Im ( ) = + ;
[ ]
( )[ ]
( )( )
Re ( )
Im ( )
G j
G j
=+
=+
2
11
1
2
2
2
b) Tabla:
[ ]Re ( )G j [ ]Im ( )G j0 2
0.1 1.98 0.91 1 010 0.0198 -0.098 0 0
c) Diagrama polar:
-0.5 0 0.5 1 1.5 2-10
-8
-6
-4
-2
0
2
4
6
8
10
Diagrama polar Caso 1 (lnea continua) y simtrico (lnea discontinua)
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
46/55
Teora de control. Diseo electrnico278
d) Diagrama de Nyquist:
Para trazar el diagrama de Nyquist nicamente debemos trazar el simtrico del diagrama polarrespecto al eje real, as como trazar el recorrido de radio infinito correspondiente a la transformacin
del recorrido de Nyquist alrededor del polo en origen del plano S. Este recorrido de radio infinito serecorre en sentido horario porque el polo en origen es rodeado en sentido antihorario por el recorridode Nyquist.
-1
ImG
ReG
Diagrama de Nyquist Caso 1.
e) Obtencin del margen de fase y el margen de ganancia:
Para calcular el margen de fase nicamente debemos encontrar la interseccin entre el diagrama polary el circulo de radio unidad. Esta interseccin ocurre parat=1rad/seg en el punto 1, resultando deeste modo un valor de MF=180o.
El margen de ganancia se obtiene buscando la frecuencia para la cual la respuesta frecuencia en lazoabierto presenta 180o, no producindose esta situacin para ningn valor de frecuencia (exceptuandopara=), obteniendo MG=0.
f) Aplicacin del criterio de Nyquist:
En el diagrama de Nyquist se observa un rodeo en sentido horario al punto -1+j0, lo que implica N=1.El sistema en lazo abierto no posee ningn polo en semiplano derecho, P=0 (porque el polo en origenno se encuentra en el interior del recorrido de Nyquist). De este modo: Z=N+P=1. El sistema en lazocerrado posee un polo en semiplano derecho, siendo, de este modo, inestable.
g) Comparando los resultados anteriores comprobamos que en sistemas de fase no mnima no esposible aplicar los conceptos de margen de fase y margen de ganancia para cuantificar la estabilidadrelativa porque son contradictorios con el resultado del criterio de Nyquist. Fijmonos que,aparentemente, el sistema en lazo cerrado es estable observando los valores de margen de fase ymargen de ganancia, cuando realmente es inestable, como sabemos a partir del criterio de estabilidadabsoluta.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
47/55
4. Anlisis frecuencial de sistemas de control 279
h) Variacin de la estabilidad en funcin de la ganancia en continua:
Si la ganancia en continua aumenta el sistema permanece siendo inestable debido a que, observando elLGR, aparece una rama en semiplano derecho que es originaria de la inestabilidad del sistema en lazo
cerrado.
* Caso 2: G ss
s s s( )( )( )=+
+ =11
1
a) Respuesta frecuencial:
G j j j( ) = = 1 1
; [ ] [ ]G j G j j G j( ) Re ( ) Im ( ) = + ;[ ]
[ ]Re ( )
Im ( )
G j
G j
==
01
b) Tabla:
[ ]Re ( )G j [ ]Im ( )G j0 0 -
0.1 0 -101 0 -110 0 -0.1 0 -0
c) Diagrama polar:
-0.5 0 0.5-10
-8
-6
-4
-2
0
2
4
6
8
10
Diagrama polar Caso 2 (lnea continua) y simtrico (lnea discontinua)
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
48/55
Teora de control. Diseo electrnico280
d) Diagrama de Nyquist:
Para trazar el diagrama de Nyquist nicamente debemos trazar el simtrico del diagrama polarrespecto al eje real, as como trazar el recorrido de radio infinito correspondiente a la transformacin
del recorrido de Nyquist alrededor del polo en origen del plano S.
ReG
ImG
-1
Diagrama de Nyquist Caso 2.
e) Obtencin del margen de fase y el margen de ganancia:
La interseccin entre el diagrama polar y el circulo de radio unidad ocurre parat=1rad/seg en elpunto -j, resultando de este modo un valor de MF=90o. Anlogamente al caso anterior se obtiene
MG=.f) Aplicacin del criterio de Nyquist:
En el diagrama de Nyquist se observa que no se produce ningn rodeo al punto -1+j0, lo que implicaN=0. El sistema en lazo abierto no posee ningn polo en semiplano derecho, P=0. De este modo:Z=N+P=0. El sistema en lazo cerrado es estable.
g) Comparando los resultados anteriores comprobamos que en sistemas de fase mnima s es posibleaplicar los conceptos de margen de fase y margen de ganancia para cuantificar la estabilidad relativaporque coinciden con el resultado del criterio de Nyquist.
h) Variacin de la estabilidad en funcin de la ganancia en continua:
Si la ganancia en continua aumenta, el sistema permanece estable proporcionando una constante detiempo ms pequea.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
49/55
4. Anlisis frecuencial de sistemas de control 281
* Caso 3: G ss
s s( )( )( )=+
11
a) Respuesta frecuencial:
( )( )
G j j j j
j( ) ( )
( )
= + =
+
+1
1
2 1
1
2
2 ; [ ] [ ]G j G j j G j( ) Re ( ) Im ( ) = + ;
[ ]( )
[ ]( )( )
Re ( )
Im ( )
G j
G j
= +
=
+
21
1
1
2
2
2
b) Tabla: [ ]Re ( )G j [ ]Im ( )G j0 -2
0.1 -1.98 0.91 -1 010 -0.0198 -0.098 -0 0
c) Diagrama polar:
-2.5 -2 -1.5 -1 -0.5 0-10
-8
-6
-4
-2
0
2
4
6
8
10
Diagrama polar Caso 3 (lnea continua) y simtrico (lnea discontinua)
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
50/55
Teora de control. Diseo electrnico282
d) Diagrama de Nyquist:
Trazando el simtrico del diagrama polar respecto al eje real, as como el recorrido de radio infinitocorrespondiente a la transformacin del contorno del recorrido de Nyquist alrededor del polo en
origen del plano S, se obtiene el diagrama de Nyquist.
-1 ReG
ImG
Diagrama de Nyquist Caso 3.
e) Obtencin del margen de fase y el margen de ganancia:
Para calcular el margen de fase nicamente debemos encontrar la interseccin entre el diagrama polary el circulo de radio unidad. Esta interseccin ocurre parat=1rad/seg en el punto -1, resultando de
este modo un valor de MF=0o.
El margen de ganancia se obtiene buscando la frecuencia para la cual la respuesta frecuencia en lazoabierto presenta 180o, producindose esta situacin parao=1rad/seg obteniendo MG=0.
f) Aplicacin del criterio de Nyquist:
El diagrama de Nyquist cruza por el punto -1+j0; de este modo el sistema el lazo cerrado presentapolos en el eje imaginario del plano S, por lo que es, de este modo, oscilatorio.
g) Comparando los resultados anteriores, comprobamos un resultado conocido: los sistemasoscilatorios en lazo cerrado presentan un margen de fase de cero grados y un margen de ganancia decero dBs.
h) Variacin de la estabilidad en funcin de la ganancia en continua:
Si la ganancia en continua aumenta, el sistema pasa de la inestabilidad (para k1), comportamiento totalmente opuesto al de un sistema de fase mnima.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
51/55
4. Anlisis frecuencial de sistemas de control 283
Problema 5
El Simple-Hold D/A Converter es el convertidor digital-analgico ms sencillo (tambin el mscomn en la prctica) y se caracteriza como un mantenedor de orden cero cuya funcin de
transferencia es:
G s es
ohTs
( ) = 1
Sin embargo, en determinadas aplicaciones se utiliza el convertidor digital-analgico"D/A Linear- Interpolator hold circuit" , cuyo esquema circuital se presenta en la figura 1.
Figura 1
a) Demostrar que la funcin de transferencia del convertidor digital-analgico"D/A Linear- Interpolator hold circuit" es:
( )G s
e
T s
Ts
( ) = 1
2
2
Se pretende comparar los efectos en el dominio frecuencial de estos dos tipo de convertidores digital-analgico (D/A). Para este estudio se propone el sistema:
Hp(s)T
D/ A
H(z)
Figura 2
Hp ss
c( ) = ; cumplindose:Tc
< 2
b) Calcular la expresin de la atenuacin que sufre una seal ruidosa senoidal de frecuencia=10/T(rad/seg) en la entrada del convertidor, en funcin dec y T, para los dos tipos de convertidores D/A.
ZOH
TC
R Seal Anal ica
RC=T
Goh(s)= 1-e-Ts
s
Seal Discreta
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
52/55
Teora de control. Diseo electrnico284
Nota: Suponer que la frecuencia de la seal de ruido en el plano transformado W es aproximadamenteigual a la frecuencia real.
Considrese el sistema en lazo cerrado siguiente:
+- H(z)
Seal discretaSeal discreta
c) Obtener la relacin que debe existir entrec y T para tener un margen de ganancia igual a 14 dB enlos dos tipos de convertidores D/A. Calcular el margen de fase que se obtiene en estas situaciones.
d) Indicar las ventajas y desventajas de los dos tipos de convertidores estudiados. Razonar larespuesta.
Solucin:
a) Para demostrar la funcin de transferencia del"D/A Lineal-Interpolator hold circuit" , nicamentedebemos resolver la funcin de transferencia circuital propuesto :
V sV s RCs Ts
01
1 1( )( )
= =
Conociendo que un retardo de una muestra equivale a una funcin transformada eTs , tenemos, enconclusin, la funcin de transferencia final:
G se
Ts
Ts
( ) = 1
2
2
b) Debemos calcular la expresin de la atenuacin que sufre una seal ruidosa senoidal de frecuencia = 10/T (rad/seg) en la entrada del convertidor, en funcin dec y T. Para ello recordemos quela atenuacin de una seal senoidal en un sistema lineal e invariante en el tiempo coincide con lainversa del mdulo de la respuesta frecuencial del sistema (en unidades lineales) a la frecuencia de laseal senoidal.
De este modo, previamente, se debern calcular la transformada Z y la transformada bilineal, pues setrata de un sistema discreto.
* Para "D/A Linear-Interpolator hold circuit" :
( )H s G s H s
s
e
Tsz
Tz Z
s Tz T z z
zp
cTs
c c( ) ( ) ( ) ; ( ) ( ) ( ) ( )( )
= =
= = +
1 1 1 1 1
2 1
2
21 2
31 2
2
3H
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
53/55
4. Anlisis frecuencial de sistemas de control 285
H zT
T zz z
T zz z
c c( ) ( )( )
( )( )
= + =+
22
11 2
11
Transformada bilineal:
H w T
T w
T w
T w
T w
T w
T w
T
T w
Tw T ww
T w
w T w
c cc( ) ; ( )=
+
+
+
+
=
+=
+
2
12
12
1
12
12
12
12
1
2
2 12
12
12
12
H
Nos indican que la frecuencia de la seal de ruido transformada al plano W es aproximadamente igual
a la frecuencia real; ello conlleva que, para poder conocer la atenuacin sufrida por esta seal,nicamente debemos trazar el diagrama de Bode en el plano transformado y mirar el valor de laganancia en la frecuencia:w = 10/T.
H j j T
j jTw c
w
w w( )
=
+
12
12
El diagrama de Bode es en este caso muy sencillo, pues las contribuciones de cero y polo reales defrecuencia de corte 2/T se cancelan entre s en mdulo; el resultado es nicamente una recta de
pendiente -20dB/dec que pasa por el punto 20logc para la frecuencia w = 1. En conclusin, laatenuacin resultante es:
dBw T
H j Tw c
=
= 10
20 10
/
( log)
* Para "Simple-hold D/A converter" :
H s Goh s H s es s
z z Zs
zz
Tzz
Tz
pTs c
c cc( ) ( ) ( ) ; ( ) ( )
( )= = = =
=
1 1 1 1
1 11
2 2 H
Transformada bilineal:
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
54/55
Teora de control. Diseo electrnico286
H w T T w
T w
T
T w
T w T ww T
T w
T w
T w
wc c c c( ) ; ( )=
+
=
+ +=
=
1
12
12
1
12
12
12
12
12H
Anlogamente al caso anterior :
H j j T
jw c
w
w( )
= 1
2
En este caso, debemos observar que el valor del mdulo en la frecuencia 10/T es igual al valor delmdulo en la frecuencia 2/T (asintticamente), dado que la pendiente a partir de la frecuencia 2/T esde 0dB/dec. De este modo la atenuacin resulta ser:
dBw T
H jT
wc
=
= 10
202
/
( log)
c) Obtencin de la relacin que debe existir entrec y T para tener un margen de ganancia igual a 14dB.
Para resolver este apartado deben observarse, de nuevo, los diagramas de Bode para cada uno de losconvertidores D/A.
* Para "D/A Linear-Interpolator hold circuit" :
El margen de ganancia se obtiene en la frecuencia de paso por una fase de -180, en este caso estoocurre para la frecuencia:
[ ]FASE H j Tw w w( 0 0 090 2 1802= = =arctg T
2
MG= = = =20 20 14 0 4log log 2T
dB Tw0c c
c
.
El margen de fase obtenido en este caso es:
MF wt wt= = 180 90 2 90 2 arctgT2 arctg
T2
Donde la frecuencia de transicin es:wt = c.
Los autores, 1998; Edicions UPC, 1998.
-
8/14/2019 EE00304C
55/55
4. Anlisis frecuencial de sistemas de control 287
MF= =90 2 67 38 . arctg 0.42
* Para "Simple-hold D/A converter" :
[ ]FASE H j w w w( ) 0 0 090 180= = = arctg T2
MG= = =20 14 0 4log 2T
dB Tc
c
.
El margen de fase obtenido en este caso es:
MF wt wt= = 180 90 90 arctg T2 arctgT2
Donde la frecuencia de transicin es:wt = c.
MF= =90 78 69 . arctg 0.42
d) Conclusiones :
El "Simple-hold D/A converter" ofrece mayor margen de fase (para igual margen de ganancia), peroofrece menos rechazo (menor inmunidad) al ruido que el"D/A Linear-Interpolator hold circuit" .