Elproblema delastreslentes - rmf.smf.mx · Todo taller de óptica tendrá un inventario de lentes,...
8
ENSEÑANZA REVISTA MEXICANA DE FíSICA.H (3) 291-298 JU1\'IO 2001 El problema de las tres lentes Kun Bernardo Wolf y Guillermo Krtitzsch Celllro de Ciencias Físicas, Universidad Nacional AWul/ol1la de México Apartado postal 48.3, 62251 Cuemavaca, Mor., Ml'xico R.ecibido el 17 de noviembre de 2000; ac.:eptadoel 15 de enero de 2001 ¿Con cuántas lentes podemos fabricar "todos" los sistemas ópticos? En el régimen paraxial (rayos de ángulo pequeño y lentes delgadas), el problema se reduce a uno soluble con matrices y algún ingenio. Se ha concluido en la referencia estándard [E.C.G. Sudarshan, N. ~fukunda and R. Simon, Oplica Aeta 32 (1985) 855] que el mínimo son tres lentes. Nuestro análisis es sencillo y revela mejor la estructura de las fronteras entre distintas configuraciones 6pticas. Notamos que para formar imágenes equivalentes se requieren sólo dos lentes. Decimos qué hacer cuando únicamente haya mano lentes de unas cuantas dislancias fncales. IJl'scriplvres: Óptica geométrica \Vith huw many Icns.es can we build "all" opeical systems? In (he p.lraxial régimc (rays of small angles and thin lenses). lhe problem is reduc.:ed(o one solvable with matrices and sorne wil. It has been concluded in the slandard rcference IE.C.G. Sudarshan. N. Mukunda and R. Simon, Oplica ACfa32 (1985) 855} that the minimum is three lenses. Our analysis is simple and revcals bcner the structure of the boundaries hetwcen different optical configurations. \Ve note (hallO form equivalent images only two lenses are required. \Ve say what to do when we only have al hand lenses of a few focal di~tances. Keywords: Geometrical oplics PAes: 02.IO.Gd: 42.79.Bh p q (h) :::::: p I~ z q' (a) El vector ]J se conoce como el momento óptico; es el análogo del momento mecánico en la formulación hamilto- niana de ambos modelos [.1). El vector compuesto (~) es elemento genérico del espacio fase. En el mundo plano de nuestros diagramas. la dimensión del espacio fase (y de las matrices) es :tos; en el espacio real. es cu<¡lro. (a) (b) FIGURA 2. a) Ruyos bajo desplazamiento de la pantalla q ("vuelo libre'") a '1' por una distancia z 2: O. b) Sesgo vcrticnl correspon. diente del espacio fase en la pnntalla: el ángulo de sesgo es z. FIGURA 1. a) Rayos que cruzan una pantalla quedan determina. dos por su posición '1 y su ángulo (momento) !J. b) Espacio fase. donde a cada rayo corresponde un punto. En el régimen paraxial (q,l') Ell'. Todo taller de óptica tendrá un inventario de lentes, pero ¿cuál es el número mínimo de lentes necesario para fabri- car cualquier sistema óptico? !vlás de un estudiante se ha- bri.lpreguntado esto al ver en el laboratorio una colección pe- queña o incompleta de ellas. La solución a este problema fue dada por Sudarshan, Mukunda y Simon en 1985 [1] para el régimen paraxial en dos dimensiones (véase también los ele- mentos de solución de Arsenault y !\lacukow [2), que son distintos). Mediante análisis de matrices de 2 x 2 se llega a la conclusión que el número mínimo de lentes es tres. Por otro lado, en los últimos años. las aplicaciones ópticas de la transformada fraccional de rourier al procesamiento parale- lo de señales (3), han enfocado interés en estos sistemas y en su realización por diferentes configuraciones de lentes. La meta de este artículo es ordenar y pulir la solución completa del problema con atención especial a los transformadores de Fourier; el objetivo amplio es descubrir amablemente para el lector algunos aspectos matemáticos de la óptica. Los rayos de la óptica geométrica se caracterizan, como está indicado en la Fig. 1. por su intersección q con una pa~- talla plana y sus ángulos fJ con la normal en ese punto. I~I llamado régime" paraxial (caca del eje) simplifica la parte angular considerando sólo la aproximación lineal de las fun- ciones trigonométricas y extrapolándola a la recta. real. ~O11l0 mostramos en la Fig. 2. el efecto de un desplazamiento ( vuc- lo libre") a lo largo del eje por;; está dado por 1. Elcmcntos y hcrramicntas
Transcript of Elproblema delastreslentes - rmf.smf.mx · Todo taller de óptica tendrá un inventario de lentes,...

ENSEÑANZA REVISTA MEXICANA DE FíSICA.H (3) 291-298 JU1\'IO 2001
El problema de las tres lentes
Kun Bernardo Wolf y Guillermo KrtitzschCelllro de Ciencias Físicas, Universidad Nacional AWul/ol1la de México
Apartado postal 48.3, 62251 Cuemavaca, Mor., Ml'xico
R.ecibido el 17 de noviembre de 2000; ac.:eptadoel 15 de enero de 2001
¿Con cuántas lentes podemos fabricar "todos" los sistemas ópticos? En el régimen paraxial (rayos de ángulo pequeño y lentes delgadas), elproblema se reduce a uno soluble con matrices y algún ingenio. Se ha concluido en la referencia estándard [E.C.G. Sudarshan, N. ~fukundaand R. Simon, Oplica Aeta 32 (1985) 855] que el mínimo son tres lentes. Nuestro análisis es sencillo y revela mejor la estructura de lasfronteras entre distintas configuraciones 6pticas. Notamos que para formar imágenes equivalentes se requieren sólo dos lentes. Decimos quéhacer cuando únicamente haya mano lentes de unas cuantas dislancias fncales.
IJl'scriplvres: Óptica geométrica
\Vith huw many Icns.es can we build "all" opeical systems? In (he p.lraxial régimc (rays of small angles and thin lenses). lhe problem isreduc.:ed(o one solvable with matrices and sorne wil. It has been concluded in the slandard rcference IE.C.G. Sudarshan. N. Mukunda and R.Simon, Oplica ACfa32 (1985) 855} that the minimum is three lenses. Our analysis is simple and revcals bcner the structure of the boundarieshetwcen different optical configurations. \Ve note (hallO form equivalent images only two lenses are required. \Ve say what to do when weonly have al hand lenses of a few focal di~tances.
Keywords: Geometrical oplics
PAes: 02.IO.Gd: 42.79.Bh
p
q
(h)
:::::: pI~
zq'
(a)
El vector ]J se conoce como el momento óptico; es elanálogo del momento mecánico en la formulación hamilto-
niana de ambos modelos [.1). El vector compuesto (~) es
elemento genérico del espacio fase. En el mundo plano denuestros diagramas. la dimensión del espacio fase (y de lasmatrices) es :tos; en el espacio real. es cu<¡lro.
(a) (b)
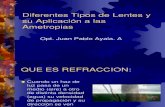
FIGURA 2. a) Ruyos bajo desplazamiento de la pantalla q ("vuelolibre'") a '1' por una distancia z 2: O. b) Sesgo vcrticnl correspon.diente del espacio fase en la pnntalla: el ángulo de sesgo es z.
FIGURA 1. a) Rayos que cruzan una pantalla quedan determina.dos por su posición '1 y su ángulo (momento) !J. b) Espacio fase.donde a cada rayo corresponde un punto. En el régimen paraxial(q,l') E ll'.
Todo taller de óptica tendrá un inventario de lentes, pero¿cuál es el número mínimo de lentes necesario para fabri-car cualquier sistema óptico? !vlás de un estudiante se ha-bri.l preguntado esto al ver en el laboratorio una colección pe-queña o incompleta de ellas. La solución a este problema fuedada por Sudarshan, Mukunda y Simon en 1985 [1] para elrégimen paraxial en dos dimensiones (véase también los ele-mentos de solución de Arsenault y !\lacukow [2), que sondistintos). Mediante análisis de matrices de 2 x 2 se llega ala conclusión que el número mínimo de lentes es tres. Porotro lado, en los últimos años. las aplicaciones ópticas de latransformada fraccional de rourier al procesamiento parale-lo de señales (3), han enfocado interés en estos sistemas yen su realización por diferentes configuraciones de lentes. Lameta de este artículo es ordenar y pulir la solución completadel problema con atención especial a los transformadores deFourier; el objetivo amplio es descubrir amablemente para ellector algunos aspectos matemáticos de la óptica.
Los rayos de la óptica geométrica se caracterizan, comoestá indicado en la Fig. 1. por su intersección q con una pa~-talla plana y sus ángulos fJ con la normal en ese punto. I~Illamado régime" paraxial (caca del eje) simplifica la parteangular considerando sólo la aproximación lineal de las fun-ciones trigonométricas y extrapolándola a la recta. real. ~O11l0mostramos en la Fig. 2. el efecto de un desplazamiento ( vuc-lo libre") a lo largo del eje por;; está dado por
1. Elcmcntos y hcrramicntas

2. El espacio abe de los sistemas ópticos
pg
q
(b)
KURT BERNARDO WOLF Y GUILLERMO KROTZSCll
en el que una de sus lentes está en contacto con la pantalla.Lejos de ser un problema trivial, la agregació~ de elementosópticos revela una estructura sui gelleris de regIOnes con fron-teras abiertas y cerradas en a. b, c. En la Seco 6 comentamosalgunas referencias de valor histórico y dejamos el pro~l~maen más dimensiones (que podría fascinar a un matematlco)abierto.
z
(a)
q'q-~-~-~
-~--~-~-
292
FIGURA 3. a) Acción de una lente delgada (convexa) sobre los ra-yos referidos a dos pantallas (de entrada q y salida (/) coinci~c~tcs;la distancia focal es f ::= l/g. b) Sesgo horizontal del espacIo fase;el ángulo de sesgo es"'" g.
Cuando a lo largo del eje óptico colocamos (de izquierda aderecha como siempre viaja la luz en el mundo paraxial) dossubsistemas MI y M2, las transformaciones del espacio fa-se (3) se multiplicarán de la manera siguiente:
L.I .¡cción de una lente delgada de potencia gaussiana g,como se muestra en la Pig. 3, es
La distancia/ocal f = 1/9 indica dónde se cruzan rayos ori-ginalmente paralelos. A diferencia de los espacios vacíos (1)que no pueden ser negativos. las lentes pueden ser convexas(9 > O). cóncavas (9 < O). o triviales (y = O).
Lentes y espacios vacíos son los elementos básicos conlos que contamos para construir sistemas ópticos paraxialcs,cuya acción sobre el espacio fase será lineal, y genéricamentede la forma
= ( dp - b'l ), ad _ cb = J. (3)-cp + a'l
Adelantamos que el determinante de estas matrices es la uni-dad. porque lo es para los elementos ópticos (1) Y(2). De estamanera, asociando sistemas ópticos .;\If(M) con matrices Mde 2 x 2, resolvemos el problema de las tres lentes medianteel análisis matemático de matrices de 2 x 2 [5}.
En el caso real, cuando p y q son 2-vectores en el planode la pantalla (y el espacio fase 4-dimensional), los sistemasópticos descritos por (3) son aquellos compuestos por len-tes con superficies esféricas (delgadas) alineadas sobre un ejeóptico z (sistemas axial mente simétricos). En la Seco 2 preci-saremos la relación entre la concatenación de los elementosópticos y la multiplicación de sus matrices. Allí también pre-sentamos los transformadores fraccionales de Fourier y algu-nas de sus propiedades. Finalmente, definimos el espacio abede sistemas ópticos que, aunque obvio, los autores no hanencontrado en la literatura.
En las Secs. 3, 4 Y5 determinamos las regiones del espa-cio abe que corresponden a sistemas ópticos realizables conuna, dos y tres lentes, respectivamente. La restricción funda-mental consiste en que los espacios vacíos z solamente pue-dan tener longitud positiva z > O;el Iímitc z = Ocorrespon-de a un cambio de configuración. o a un sistema restringido
[J.-J(MIP'1(M,)] : (~) = .\o1(M¡) [M(M,) : G)]= .\o1(M¡) : [M21 (~)]
_ M-I (,\o1(M¡) : 1')- , ,\o1(M¡) : '1
= l\1.~IM~I (Ji)- '1
= (MI M,)-I e;)= ,\o1(MIl\h) : (~). (4)
Como vemos, para que la concatenación de elementosópticos corresponda con la multiplicación de sus matrices, laacción genérica (3) de ,\01(M) requiere que sea la inversa dela matriz 1\'1 la que actúe sobre las coordenadas del espaciofase de los rayos. Así, con la ventaja de respetar el orden delos elementos, trabajaremos en adelante con las matrices M.
Del desarrollo (4) también sigue que ,\01(1) = 1 es elelemento unidad. y que la asociatividad de tres o más fac-tores vale. Ahora notemos que los elementos ópticos, des-plazamientos y lentes (1)-(2), están asociados con matri-ces de determinante unidad, llamadas unimodulares. Comodet(MI M,) = det MI det M" la matriz de cualquier sis-tema óptico compuesto también tendrá determinante unidad.Esto a su vez implica que el inverso de cualquier sistema (pa..-axial) exisle. y es [,\o1(M)¡-r = ,\o1(M-I). El conjunto dematrices que representan a estos sistemas cumplen en consc-cuencia los axiomas de un grupo. El conjunto de matrices (3)pertenecen al grupo de transformaciones lineales, unimodu.lares y reales de un espacio de 2 dimensiones, que se indicapor SL(2, iR). La condición de unimodularicdad implica queen las Figs. 2 y 3 anteriores (espacio óptico de dos dimensio-nes y espacio fase también de dos dimensiones), el arca delespacio fase de rayos, dpdr¡, se conserve bajo la acción detodo sistema óptico. Esta ley de conservación se asemeja alprincipio de Lavoisier o al de Liouville: la luz (los rayos de laóptica geométrica) no se crea ni se destruye, sólo se transfor-
R,., ..Mex. Frs. 47 (3) (2001) 291-298

EL PROBLEMA DE LAS TRES LENTES 293
(a) (b)
FIGURA 4. a) Sistema DLD que rcaliza las transformadas fmecio.naJes de Fourier con potencias O :5 (l < 2. b) ROlación del espaciofase de rayos por un ángulo (1r j2)ct hajo este sistema ()ptico.
a
FIGURA 5. El espacio (lOe de sistemas ópticos parax:iales. Es elespacio R3 con el plano a := O excluido. Cada punto correspon.de a una transformación distinta sobre el espacio fase. y a cualquierconfigurnción de lentes que la logre. La transformación unidad (sis-tema trivial) está en el PUnlO (a = 1, b = O,e = O) que tomamospor origen de los ejes. Sobre el eje -e marcamos los vuelos lihres(positivos). y las lentes sohre el eje b.Marcamos también el círculode transformadores fraccionales de Fourier. que se encuentran en elplano ¡, = -c entre tl = :!:l; este círculo cruza de manera conlínuael plano singular (l = O.
Las transformadas fraccionales de Fourier (5) evitan la sin-gularidad del plano fl = O porque sobre su círculo se cumpleb = -l/e = 1 Y d = O. Los planos a = O Y a = 1 así comob = O Y e := O serán referencias útiles corno fronteras en-tre regiones de realizabilidad por sistemas de 1, 2 Y3 lentes,corno ahora procederemos a mostrar.
(5 )
p
q
Q E !JImod 4.sen ~QJ'"cas ~l
q q'
'" 1~,,1 z
1'"-~1
I
(
('Os :"Fa = ,\1 . 2
"- Sl'U -O2
ma. Es decir, el espacio fase de rayos se comporta como unfluido incompresible. Comentaremos más sobre m;:ísdimen-siones en la sección de conclusiones.
Un conjunto distinguido de sistemas ópticos. ilustrado enla Fig. 4, se logra con una lente equidistante entre dos pan-tallas. Cambiando la distancia a las pantallas, como veremosmás adelante. recorreremos (parte de) el círculo de los trans-formadores !racciOlw/es de Fourier. Genéricamente, de po-tencia (l son
3, Configuraciones de una lente
Comenzaremos considerando la configuración DLO, dond~una lente de potencia gaussiana 9 E 3~está entre dos espa-cios vacíos no-negativos =) 2: O Y Z2 2: O. El sistema es
(8)
(6)
1 - ab
.'i )1 - Z,.'i .
!/) ;\1 ( 11 -Z2
!I = iJ,
b = g,
y sus inversas.
I-d a-be-lZI := -b- := avNo todos los sistemas ópticos son realizables en configu-
ración DLO; por ejemplo, si quisiéramos realizar el sistema
,\1 G D en esta configuración, la pri,mera de las Ecs. (8)
nos informaría que zl == -1.10 cual esta fuera del rango per-
Entre los tres parámetros ave genéricos y los tres paráme-tros libres del sistema DLD. ZI' g. Z2 podemos despejar lassiguentcs relaciones:
Su acción sobre el espacio fase (3) es hacerlo rotar rígida-mente alrededor del origen por un :íngulo (,,/2)0 contrarioa las manecillas del reloj. como se ve en la figura. Cuando(l = 1, la transformación es F: (p, '1)= (-'1, p). El reempla-zo de la posición por momento y del momento por (menos)posición, es la muy conocida acción de la transformada ¡me-gral de Fourier sobre las funciones de onda de la I11cc.ínicacuántica y de la óptica ondulatoria. El conjunto de matri-ces (5) forma el subgrupo de rotaciones 80(2) e 8L(2,!JI)porque su producto es :F0' :F°2 = ;:°1 +°2 módulo 4.
Ahora usaremos los tres parámetros independientes ll,b,r,
(ab) ..de una matriz unimodular M == e d como ejes cartesIa-
nos de un espacio :R3 que representamos con el "cubo" dela Fig. 5, donde cada punto (a, b, e) E !JI3corresponde a unsistema óptico paraxial. El sistema unidad M = 1 está en elorigen de coordenadas (a = 1, b = O,e = O). Podemos pen-sar en e como el eje de desplazamientos (O). marcando loselementos positivos (1) que son naturales en el laboratorio:también marcamos el eje b de las lentes (L). El eje (l es elfactor de magnificación de la imagen, que puede ser positivoo negativo -pero 110 cero-. El plano a := O debe ser remo-vido de ese espacio R3 porque allí la correspondencia entrepuntos y sistemas ópticos es inválida: como debe cumplirsebe := -1 por la condición de unimodulariedad, la segundacoordenada del plano que excluimos de la figura se vuelve elcuarto parámetro d. que ahora es independiente de f) := -l/c.
Re\'. Mex. Fís. 47 (3) (200!) 291-298

FIGURA 6. Regionc~ del c~pacio (liJe de si~tell1as óptico~ que P~ll;-
den ser realizada con una lente en (.'onfiguracilm DL[): la reglónsuperior con un;:1lente cóncava y la inferior con ~na lenle COllvexa.Estas regiones incluyen las líneas de len!es L (cJe b). ue despla,:a-mienw posiLivo D (semieje -e), y de transformadorc~ uc Fouflercon potencia O ::; n < 2.
294
{/
KURT BERNARDO WOLF y GUILLERMO KROTZSCIl
con factor de magnificación (l. Las demás caras son abicl1as.Las regiones DLD cóncavas y convexas S0." .disjuntas, y. :ctocan sólo a través de la arista de lentes tnvlales. Su unJondefine la región de sistemas realizables con una lente ..
El círculo de transformadas fraccionales de Founcr (5)marcado en la Fig. 5 está parcialmente contenido en la regiónDLD-convcxa de la Fig. 6. Como es fácil convencerse de (6)v la Pi2. 4, con una lente convexa se pueden realizar lrans-j"ormad"'-orcs :F0 con potencia O < n < 2 -pero no más-oCasos especiales de la configuración DLD son la DL (vistaantes para Z2 = O. que cicrra la cara (l = 1 de la región delIna lenle). y la LD, donde", = O Y d = 1, de modo que(l =: 1 + be con e < O. Ésta es una superficie reglada gene-rada por Iínc3s p3r~clas 31 plano (kl) que cruzan el eje e conúngulo aret an e; como esperado. esta superficie está conteni-da en la unión de las regiones DLD.
4. Configuraciones de dos lentes
Este rango es la región inferior del espacio abe en la Fig, 6.El cuadrante frontera (J = 1 nuevamente contiene los siste-mas reducidos DL con Z2 = O. La cara c: = O de la regióncaracteriza los sistemas que forma1l imugen. es decir, cuyaimagen [dada por (3)J depende solamente de la posición delobjeto (y no dc la dirección del rayo), como /\.1 : q H aq.
Las lentes triviales (sistemas D) están todas en la arista (a =l." = O,e::; O).
Las lentes convexas en configuración DLD llenan otra rc-gión del espacio abe de sistemas ópticos. Cuando b = [}> Oen (7), entonces 9z'] 2::: O. de modo que (J :S" 1; pero haycuatro posibilidades. 11 = 1. 1 > a > O, 11 = O (el planosingular>. y (l < 0, que determinan que (' esté en los rangossiguientes:
( 12)(LDL).
" = !/¡a + 92) . (11)d = 1 - Z!h
(' ~ O, }r - O.
(a = 1 - 91"e = -z ::;O
b E 3~,!J E !R.
O i a E 'R.a=l.
Con dos lentes tcnemos gcnéricamente la configuraciónDLDLD. con tres espacios vacíos y por ende con cincoparámetros ajustables, para cubrir una región del espacio abede sistemas ópticos. que debe contener propiamente a la re-gión DLD de la sección anterior. Hay un caso restringido im-parlante: la configuración LDL donde las dos lente,') están encontacto con las pantallas objeto e imagen. Analizaremos pri-mero esta última, para utilizarla luego corno base de induc-ción.
Con dos lentes de potencias gaussianas !11. 9"2 E :R. se.paradas por un desplazamiento z 2: O. realizamos sistemasópticos cuyas matrices son
Éste es el semi-espacio mostrado en la Fig. 7. La frontera(' = O es abierta, porque cuando las dos lentes están en con-tacto (z = O). el sistema degenera en L y ocupa únicamentela línea (a = 1.!J E :11." = O). En panicular. están e.\clui-dos de la región LDL los magnificadores puros, sistemas (3)representados por matrices diagonales. Excluyendo el planosingular a = 0, la región LDL está caracterizada por
En consecuencia, con LDL's llenamos los dos octantes de si 5-lemas (" > 1.!J::; O, e < O) Y (O i" < l. ¡, 2: O. e < O). queno fueron realizables con configuraciones de una lente. Siste.mas que C<len en la intersección de las regiones DLD y LDLpueden realizarse con ambas configuraciones.
Ahora despegaremos de la pantalla la primera lente deuna configuración LDL. para examinar el caso semi-restringi-do DLDL de dos len les. La composición de un desplazamien-
(9)
(DLD ) . (10)
conVexae < O. }e E 31.
e < O. }" = O.
,,< O,
" < O.
b > O,!J > O,
(J 2: l.a = 1,
O<a::;l.(l < O,
mitido. Por ello. analizaremos ahora las Ecs. (7) para deter-minar la región del espacio abe que .'11' está permitida para es-ta configuración. Hay dos casos distintos a considerar: lentescóncavas y lentes convexas.
El caso de una lente cóncava b = [}< O es sencillo por-que - Y=:2 2: () implica (1 2: 1, Y en consecuencia (' ~ O. Est.lregión es el oelante del espacio mostrado en la parte superiorde la Fig. 6. La frontera b de la región es abierta (exc1uímoslentes triviales f) = O); la frontcra e también es abierta, cx-cepto por los desplazamientos triviales que están únicamenteen la arisla (" = 1,!J < O. r = O); Y finalmente. la fronte-ra a = 1 es cerrada y const3 de los sistemas reducidos DL.con Z') = O. Consecuentemente, la región de sistemas OLD.cónca~os es la unión de un octante abierto, un cuadrante deplano y una semi-línea,
Re" Met. Frs. 47 (3) (2001) 291-29R

EL PROBLEMA DE LAS TRES LENTES 295a a
e
FIGURA 7. Región del espacio (lbe de ~islcmas óptico.'. realizablesen una configuraó6n restringida de um. lentes LDL.
to D (no trivial, con z > O), Y el LOL genérico de (12), es
FIG~Rt~ 8, Si~temas ópticos realizables cn una configuración ~emi-rcstnnguJa de dos lentes DLDL. que incluye el círculo de transfor-madores de Fourier con potencias O :S Q < 3.
En pal1icular. estamos interesados en penetrar el semi-c~pacjo e' 2: O vedado para configuraciones más simples.En (13), (' < O Y -z < O, de modo que sólo a < O pue-de dar lugar a e' 2: O; la región e' < O no tiene restricción.Eliminando primas. la región del espacio abe realizable consistemas DLDL es
(a' = a i" Oe' :;::e - tu
e~ el tercer cuarto del círculo rr ::; (J :S: (3j2)rr. correspon-dientes a potencias 2 :S o :S 3 de la transformada de Pouricr.El resto del ciclo requerirá al menos un elemento óptico más.
La región DLDL excluye el cuadrante (a > O, b E 'R,e ;::: O) en la Fig. 8. Para intentar cubrirlo utilizaremos lala configuración DLDLD de dos lentes entre tres espaciosvacíos. Rasándonos en los resultados previos para sistemasDLOL, agregamos una D más:
(16)b' = b)(JI = d '(" b) ( 1 O) = (a: = " - zb
e ti -z 1 e =;::: e - zd
li=bE'R)d'=d-zb . (13)
b E !JI) _riE!JI -(
a i" O<:<0
donde (l y e están restringidas en ( 14) Yb E R. Podemos satis-faccr la relación a' =a-zb > Osia > Oosi(a < O,b<O);y podemos satisfacer e' = e - zd = (ca' - z) j a 2: O si(l < () o (a > o. e ~ O). Esto se traduce en seis condi-ciones que -eliminando primas- permiten acceder al cua.dranle (a > O, v E R, e 2: O), no cubierto por los sistemassemi-restringidos DLDL en (14), o al cuadrante (a < O, " E}J~,V < O) que ya cubrimos. De esta manera, con sistemasgenéricos de dos lentes complelamos la región previa con elnuevo octante (a > O, v < a, e 2: O). En la Pig. 9 mostramosla región de los sistemas ópticos abe que pueden ser realiza-dos con dos lentes.
El cuarto cuarto del ciclo de transformadores fracciona-les de Fourier está contenido en la nueva región ganada consistemas DLDLD. Con DLD's pudimos realizar :F0 para po-tencias O :S. O' < 2; así, concatenando dos de estos sistc-mas alcanzamos ahora potencias O :S o: < 4. Pero estamosimpedidos de cerrar el ciclo de lransformadores de Fouriercon la pOlencia O' = 4, lo cual es distinto del sistema ópticoidentidad (l = O, Y subraya la complejidad del problema enlas frontcras entre regiones en quc esto es realizable. Las ca-ras de la región DLDLD son abiertas, excepto en la línea delentes L (el eje b), donde el conjunto es cerrado. En conse-cuencia, quedan aún excluidos los magnificadores positivospuros (cl semieje +a) y los vuelos libres negativos (el semie-je +c). Necesitaremos tres lentes para cubrir el octante quefalta, (a> O,b e: O,e ~ O).
( 14)(DLDL)e < O, }e 2: O,
bE 'R,bE 'R,
a i" O,a < O,
v =!!1 +!h-!ItZ2!h)_,,= ... -
(l'OS e s.cn e). (¡5)
- sen (} ('os (J
y se muestra en la Fig. 8. InterscCla con la región DLD con.vexa (a < O, b > (J, c ~ O) (ef Fig. 6), e incluye los magnifi-cadores puros con inversión. a < 0, que se encuentran sobreel semieje vertical inferior.
E! tercer cuarto del ciclo de Fourier puede realizarse den.tro de la nueva región DLOL. Para e = (11' (2)n, la compo-sición de D y LDL a una transformada fraccional de Fou-rier(5)es
Usando las primas como anteriormente, el primer elemen-to establece que a' = a = cos(}. mientras que los elemen-tos antidiagonales relacionan los micmbros de la igualdadsen (J = v = Vi =: -e' =: =1a -e =: ZI cos B + Z2. De aquí resultaque en la nueva región e' 2: O. la restricción -e' = sen B :S Oimplica que sólo pueden cubrirse los ángulos de rotacióníT::; (J::; 211", mientras que -e' = ZI(I-C ::; O y e :S O sólopueden ser satisfechas si tI :s O, en (1(2)11' :s e :s (3(2)11'{el punto (l = O de este conjunto, C0l110 vimos antes, est;:íbien definido). En consecuencia, con sistemas DLDL pode-rnos cubrir solamente la intersección de estos dos intervalos.
RCI'. Mex. Fis. ~7 (3) (2001) 291-298

296 KURT BERNARDO WOLF y GUILLERMO KROTZSCH
FIGURA 10. El plano (Z¡,Z2) de longitud de espacios vacíos enconfiguraciones DLDL; sólo el primer cuadrante es r.ealizahle:Laslíneas az} + Z2 + e = Omueslrnn sislemas que realizan el mismosistema óptico (a, b, e).
Z/
Z2
-c
Z/
~-c
Z2
e
a
FIGURA 9. Sistemas óplicos realizables con dos lentes en la conli-\!uración genérica DLDLD. Incluye ahora transformadores de Fou-;icr con O < n < ~.El octante que queda vacío requiere dc almcno~ una ¡;;ntc más para ser realizado.
y válidas para e < O. Pero si S0l110S requeridos a fabricar
un sislema óplico ,"t (~ ~) con una configuración DLDL
(con parámetros z¡, 91' =2_ !h respectivamente), y para elloinvertimos (13). obtenemos las tres relaciones
(20)
( 19)
b) = (", = II + gc b' = b + 9d)d c/=c d'=d
b - g, - ng,bg2
con dos parámetros libres. gil g}.. que podemos escoger jui-ciosamente entre las pocas lentes que tengamos a disposiciónde manera que el plano contenido en el espacio ZI' Z2' Z3 delas Ecs, (19). Ilg,z, + r/¡y,z, + bg2Z3 = 2b - di/¡ - "Y"intersecte el octante Z)l Z2' Z2 2: o.
u{¡ - (1 + {¡c)g, - ag,
abf1t
9, + g, - b
91!h
donde los parámetros a, b, e cumplen con las restriccio-nes (14). y donde buscamos en los punlos (lI' > O,b' ~ O.c' ~ O) del octante por cubrir. Es evidente que con II < O.e' = e > O Y una lente!J E R apropiada. ni puede alcan-zar cualquier valor real. De esta manera llenamos el octante(a' > 0, l/ 2: 0, (:' > O). Sin embargo. el valor (:' = Oestáexcluido de este conjunto porque entonces a = a' < ()es fi-ja. En consecuencia. con configuraciones restringidas de treslentes LDLDL podemos realizar todos los sistemas ópticos.excepto el cuadrante de plano (a > 0, b 2: O,e == O) indicadoen la Fig. 11, que examinaremos adelante.
Con un mínimo de tres lentes. dos de ellas coincidentescon las pantallas de entrada y salida, podemos producir enparticular los de.\plazamie1l/os f1egati\'os que ocupan el
Configuraciones de tres lentes completarán el octante qut.:fal-ta. (a > O.b 2: O,e 2: O). de sistemas que IIO son realizablescon dos lentes y que se muestra en la Fig. 9. Procederemos aconstruir sistemas restringidos de tres lentes LDLDL (dondelas lentes extremas tocan las pantallas) colocando una lente Lfrente a sistemas semi-restringidos de dos lentes DLDL. Cll-
yos parámetros aiJe se encuentran en la región llena. Despuésexaminaremos la región que aún así queda irrealizada. Comoantes. multiplicamos las matrices correspondientes:
5. Configuraciones de tres lentes
( I 7)fU;
1 - (l + /w
c
d - 1!1-2 =z = -e,
(l - 1!JI = -c-,-'
Revisaremos ahora la correspondencia entre puntos delespacio abe y sistemas ópticos. En la sección anterior. es-ta asociación era 1: 1 en las regiones permitidas, y estu-vo dada por las relaciones directa e inversa (7) y (8) conlos parámetros del sistema óptico OLD. En la configuraciónLOL. las relaciones inversas a (11) también son 1: 1,
a-cYt-1ZI=----
aYI
Aquí podemos escoger un parámetro libre (en algún intervaloválido) para construir una familia de sistemas ópticos con elmismo efecto sobre el espacio fase de rayos. Los dos despla-zamientos z¡ deben cumplir aZI + =2 + e = OYser positivos;en el plano ZI-z2 mostrado en la Fig. 10. la familia es una rec-ta que corta los ejes en -e/a y -e respectivamente. Cuandoc < O(dentro de la región DLDL en la Fig, 7), la recta len-drá un segmento en el primer cuadrante ZI' Z2 2: O. finitocuando a > OY semi-infinito cuando a < O. Cualquier par(ZI' Z2) en ese segmento permite realizar el sistema ópticodeseado. Si nuestro estuche de lentes tiene sólo un númeropequeño de potencias gaussianas !Ji' podemos escoger unaque ajuste Z2 con flt = (1 - ({)/ Z2' Ybuscar otra que cumpla9, = (1, - !It)/'L
Los espacios vacíos son literalmente gratis. por lo cual
podemos preferir la realización de una ,"t (: ~) en la con-
figuración genérica de dos lentes DLDLD en la región cu-bierta por estos sistemas. Con ayuda de MATHEMATlCA, seinviertc (16) en las trcs relacioncs siguientes:
Re\'. M,'x, n" 47 (3) (2001) 291-298

EL PROBLEMA DE LAS TRES LENTES 297a
Si lo que deseamos es un vuelo libre V:; negativo. tomamosa = 1= el, b = O Ye = - z > O, Y encontramos las igualdades
(26)
(25)
ay
1+ 2a2+aZ2 = --,
!J
_ 1 y, + (eI- cY3)Y'z} - - + -----~---Yt (alh - b)y,
1 1 a'h - bZ2 == - + - + -' --,
91 !h !I¡ 92
19t+a!}-lZ3 == - + -y, (aY3 - o)y,
a-I+I+aayZI
Cuando a > O, con tres lentes convexas iguales que hayamosencontrado en el estuche podemos determinar las distancias alas que debemos colocarlas para obtener el magnificador de.seado. Cuando a < O, podemos realizar magnificadores condos lentes convexas DLDL como vimos anteriormente (o. siinsistimos en metcr una lente más, tendremos que cuidar quesea tal que las tres distancias (25) sean positivas). Para a = 1tenemos el sistema unidad realizado como {DL)3 con tres dis-tancias iguales y longitud total f = l/y:
Por ejemplo, para construir los magnificadores puros b ==O == e sobre el eje a de la Fig. 5 con tres lentes iguales91 == Y2 = 93 == .'l. reducimos las relaciones anteriores a
Los sistemas que 110 pueden ser realizados con los cincoelementos LDLDL ocupan el cuadrante plano (a > O, b::: O.e = O). Esto es eVIdente en (22) porque e = O aparece en dosde los tres denominadores; az} + Z2 YZI + dZ2 no pueden sercero con a y b en este cuadrante. El cuadrante "prohibido"es un plano n~cesariamente abierto en su arista a == O, Yce-rrado en su ansta IJ == O. Prominentemente, los magnificado-res puros positivos representados por matrices diag (a, a-I),(l > 0.110 pueden ser realizados en configuraciones restringi-das de tres lentes. Si preccdemos el arreglo LDLDL con undesplazamiento, como en (13), es fácil ver que de e i O po-demos pasar a e' == O con una Z apropiada (y a i O). De estamanera, con la configuración de tres lentes semi-restringidaDLDLDL, llenamos el plano de la Fig. 11 Ycubrimos todo elespacio abe de sistemas ópticos paraxiales.
Si nos preguntamos cómo (y con qué parámetros li-bres) podemos construir con tres lentes en configuración
DLDLDL un sistema deseado .1\.1 (a b), basta invertir ele el
producto genérico de tres desplazamientos positivos z z' '1' 2'YZ3 Ytomar las tres lentes!l¡, 92' Y93 por parámctros libres.Obtenemos
(23)
(21 )
e + UZI + z2y, ez¡
y, = e + ZI + Z2
Z¡Z2
e + ZI + dZ2 (22)Y3 ==eZ2
El aparato tiene longitud 3z y actúa C0l110 un espacio ne-gativo -2. No hay indicación en [1] sobre cómo se encontróla solución (21). Para trascender las soluciones de ensayo-y-error, invertiremos los cinco parámetros 91' 21,92' zl' 9:1de la configuración restringida LDLDL en términos de losparámetros (1,1J. (: del sistema deseado, escogiendo dos deellos independientes -por "simetría" tomamos los dos vue-los libres. Despejando las relaciones para los otros tres obte-nemos
FIGURA 11. El cuadrante plano 110 realizable con configuracionesrestringidas de (res lenles LDLDL. Para llenar esta región (que in-cluye magnificadores puros positivos) se requiere de 1.1configura-ción general semi.rcsrringida DLDLDL.
eje +c. En la Rcf. 1, se encontró un resultado para sistemasDLDLDLD (sin restricción) y se propuso un arreglo equiva-lente al siguiente LDLDL con dos de tres lentes iguales yconvexas:
donde Z == Z + ZI + Z2' En particular, si queremos un sistcmacon espacios iguales Zl == Z2 == z. tendrcmos también lentesiguales 91 == Y2 == Y3 = 3/z. Es decir, descubrimos un nuevoarreglo óptico:
(24)
El aparato (24) cs más eficiente que el de Sudarshan, t\.lu-kunda y Simon [IJ en (21), porque su longitud total es 2z,y es simétrico bajo reflexión z t-+ -z (esto elimina algunasaberraciones más allá del régimen paraxial).
(27)
Con esta configuración cerramos el ciclo de 3600 de transfor-madas fraccionales de Fourier.
Es importante notar en toda la discusión anterior, quecuando juzgamos el desempeño de un sistema óptico por lasimágelles que nos proyecta sobre sobre una pantalla, es decir.cuando somos ciegos a la dirección de los rayos que llegan,entonces perdemos un parámetro. En efecto, vemos de (3)que las matrices de dos sistemas ópticos que difieran en sus
Rl"'. Ml'.l. n,. 47 (3) (2001) 291-298

298 KURT BERNARDO WOLF y GUILLERMO KROTZSCH
elementos d Y [J. Ilevaróín el mismo rayo (P, '1) al mismo pun-to en la pantalla. (/ (p. q) = al} - ('p. Ignorar el par;:ímctro bcorresponde a proyectar el espacio (liJe. de todas nuestras fi-2:uras sobre el plano (1('. Bajo este criterio de desempeño.;¡stemas DLD de una lente cóncava ocuparán el cuadrante(o > t, (' < O): sislcmas de una lente convexa, los dos cua-dranles (j < 1. e < O) Y (" > O." 2 O), cte.; y "todos"los sistemas ópticos serán realizables por configuraciones dehasta dos lentes. DLDLD.
6. Conclusiones
Habiendo resuelto el problema de las tres lentes. queremosagregar algunas líneas de contcxlO .\ la solución. Aquí he-IllOS trabajado con sistemas ópticos planos. En la tres di-mensiones del espacio 'real', la dimensión del espacio fa-se y de las matrices. como apuntamos. es cuatro. No seránmatrices generales de -1 x -1 las que representen sistemasópticos. sino sólo aquéllas que también preserven la estruc-tura IlllmillOlliafla [.1] dcl modelo. El principio de Lavoisier-Liouvillc (que implica unimodulariedad) tiene que gcnerali~zarse a preservar los l'arélllesiJ d£, Poissoll {<JI']')} = c5¡,jentre las coordenadas cartesianas de posición y momento encualquier número N de dimensiones. Las matrices de trans~formación que cumplen con estas condiciones son las ma-trices SilllplécticllS [G], que no detallaremos más que indi-
1. E.eG. Slldarshatl. N. J\l11kllnda, ami R. Siman. 0pliCll Acta 32(I"S5) 855.
2. H.lI. Ar~enault ano B. ~lacllkow, 1. OIJl. Soc. I\m. 73 (1983)1350; B. Macukow and H.H. Arscnault. J. Op1. Soc. 1\/11. 73( 19S.1) 1.160.
3. D. Mendl"vie unu II.M. Ozaklns. 1. 0l'{. Soe. Am. A 111(199.1)1X75; II.M. Ozak(as and D. f\lcndlovic, 1. Opto .\'Oc. I\m. A 10(1993) 2522; H.M. Oz •.lktas and D. Mcndlo\'ic. Opl. COIIIIII.
101 (1993) 163; S. Abe and J.T. Shcrid •.Ul. J. Phy.\". A 27 (1994)4 179; H.~1. Ol.aklaS •.llld D. Mendlovic. J. Opl. Svc. Am. A 12(11)95) 743: D. i\kndlovic, Y. Bitran. R.G. DOfsch. aml A.W.Lohmann,1. Opto Soc. AIII. A 12 (1995)1665; A.W.I~obmann,D. ~lendlo\'i(', •.Hld G. Shablay. 1. Ol't. Soe. ,\/11. ,\ 1-1(1997)2901: 11.~1.Ozaklas, ~1. Alpcr KUlay. and D. Mcndlo\'ic. "In-(roduclio[l (O Ihe fractional Fouricr transform ano its applica-
car su grupo por Sp(2.N, :R). Sucede que. accidentalmente
5p(2, !R)= 5L(2, 11).El grupo de matrices 5p( 4, 'JI) tiene 10 parámetros, y los
elementos ópticos a nuestra disposición son desplazamien-tos positivos como antes en (1). Y lentes (Htigmáticas dadaspor (2) donde la potencia g¡llIssiana .rJ se recmplaza por unamatriz simétrica g de 2 x 2 que tiene 3 par;.ímetros libres. Sepuede demostrar que a partir de estos elemcntos también scgenera el grupo completo de todos los sistemas ópticos [7].Allí los transformadores fraccionales de Fouricr, que en dosdimensiones son puntos sobre un círculo Si. en cuatro di-mensiones son puntos en una hiperesfera S:J [81. Lo que parados dimensiones era el grupo de rotaciones 50(2) = U(l),en cuatro dimensiones se generaliza al grupo de matrices uni~larias de 2 x 2, U(2) ~ 50(2) 0 50(3).
Desafortunadamente, los argumentos y figuras que nosayudaron en este artículo para resolver el caso en tres dimen-siones, tendrían que generalizarse a diez. Creemos que es unproblema abierto. Vale decir que la descomposición en siste-mas de lentes y espacios 110 es el punto de vista natural en lateoría de grupos. Allí es lTIi.lsconveniente utilizar otras para-Illetrizaciones, COIllO la de lwas;]\l,'a, que factoriza a cualquiersistema óptico en un transformador de Fourier y un forma-dor de irmígen astigmálico [7,8). Con ello se gana claridaden la teoría, alÍn cuando se glose sobre su realizabilidad conconfiguraciones ópticas mínimas.
tions", in AdI'CIfICl's Ofl ]II/agillg and E1cclroll Optics. Vol. 106,( 1999). Chapo 4. p. 2.19.
.1. G. Krii,z;ch anu K.B. \Voll, Re" Me.<.Fú. 36 (1990) 724; K.B.\Valf, Procl'l'dillgs o/ ¡/u' XXX Lllti" Ameri('an Sellon1 01 Phy-sin (Ciudad de México, 17 de juli0-4 dc agosto, 1995). Ame-rican Institulc of Physics Confcrcncc Procccdings. Vol. 365(1996), p . .172.
5. A. Gerrard ano J.M. Burch, ]"trodIlCtiOfl lo ,\fatrjx MethoJs inOptics. (Wiky. Ncw York. 1975).
G. M. Kaudcrcr. Sy"'pkClic Ma[rias, Fi,..H Orda Systems a!ldSpecia1 R('/alil'ity. (\Vorlo Scicntific. Singaporc. 1994).
7. R. Siman and K.B. \Vol[, 1. Op1. Soe. I\m. ,\ 17 (2000) 342.
8. R. Simo/l ami K.B. \\'011",1.Opto Soc. A/II." 17 (2000) 2368.
R('\'. Ml'\. ¡':ú. -17 (3) (2001) 291-29X