ESCUELA POLITÉCNICA DE INGENIERÍA DE GIJÓN.€¦ · esquema y componentes de la topologÍa...
90
ESCUELA POLITÉCNICA DE INGENIERÍA DE GIJÓN. GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA ÁREA DE ELECTRÓNICA TRABAJO FIN DE GRADO Nº 613251 TÍTULO: “Laboratorio educacional de energías renovables” D. Luis David Villa Casal TUTOR: D. Jorge García García FECHA: (Julio de 2014)
Transcript of ESCUELA POLITÉCNICA DE INGENIERÍA DE GIJÓN.€¦ · esquema y componentes de la topologÍa...
ESCUELA POLITÉCNICA DE INGENIERÍA DE GIJÓN.
GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y AUTOMÁTICA
ÁREA DE ELECTRÓNICA
TRABAJO FIN DE GRADO Nº 613251
TÍTULO: “Laboratorio educacional de energías renovables”
D. Luis David Villa Casal TUTOR: D. Jorge García García
FECHA: (Julio de 2014)
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 2 de 90
Alumno: Luis David Villa Casal
Índice de la Memoria 1. OBJETIVOS Y ALCANCE ............................................................................................................................ 3 2. ANTECEDENTES ....................................................................................................................................... 4 3. ELECCIÓN DE LA TOPOLOGÍA DEL CONVERTIDOR .................................................................................... 6 4. ESQUEMA Y COMPONENTES DE LA TOPOLOGÍA FLYBACK ....................................................................... 9 5. CÁLCULO DEL TRANSFORMADOR FLYBACK ........................................................................................... 12
5.2 CÁLCULO DE LA INDUCTANCIA MAGNETIZANTE (VISTA DESDE EL PRIMARIO) ............................................................ 15 5.3 CÁLCULO DE LA BOBINA DEL PRIMARIO ............................................................................................................ 17
5.3.1 Descripción del núcleo y del carrete ............................................................................................... 17 5.3.2 Cálculo de la bobina del primario mediante mathcad ................................................................... 19 5.3.3 Cálculo de la bobina del primario analíticamente .......................................................................... 22
5.4 CÁLCULO DE LA BOBINA DEL SECUNDARIO ........................................................................................................ 32 5.4.1 Cálculo de la bobina del secundario mediante mathcad ................................................................ 32 5.4.2 Cálculo de la bobina del secundario analíticamente ...................................................................... 34
5.5 OPTIMIZACIÓN DEL ÁREA DE VENTANA DEL CARRETE .......................................................................................... 36 5.6 TRANSFORMADOR FLYBACK CONSTRUIDO Y MEDICIÓN DE LOS RESULTADOS ............................................................ 38
6. CÁLCULO DE LOS CONDENSADORES ...................................................................................................... 44 6.1 CONDENSADOR DE ENTRADA ......................................................................................................................... 44 6.2 CONDENSADOR DE SALIDA ............................................................................................................................ 44
7. ELECCIÓN Y CIRCUITOS DE PROTECCIÓN DE LOS ELEMENTOS ACTIVOS ................................................. 46 7.1 SITUACIÓN INICIAL SIN PROTECCIONES ............................................................................................................. 46
7.1.1 Simulación con powersim ............................................................................................................... 46 7.1.2 Medición de los efectos sobre la placa de prototipo ...................................................................... 47
7.2 PROTECCIÓN PARA EL TRANSISTOR ................................................................................................................. 53 7.2.1 Cálculo protección RCD para transistor .......................................................................................... 53
7.3 PROTECCIÓN RC PARA EL DIODO .................................................................................................................... 55 7.4 SITUACIÓN FINAL CON PROTECCIONES ............................................................................................................. 57
8. HARDWARE DE CONTROL ...................................................................................................................... 62 9. CONTROL ............................................................................................................................................... 65
9.1 CONTROL ANIDADO (NESTED LOOP CONTROL) ................................................................................................. 65 9.2 VALORES DEL PI ......................................................................................................................................... 65
9.2.1 Lazo interno .................................................................................................................................... 65 9.2.2 Lazo externo ................................................................................................................................... 69
9.3 DISCRETIZACIÓN DE UN REGULADOR PI ........................................................................................................... 73 9.4 VALORES NUMÉRICOS DEL REGULADOR DISCRETO .............................................................................................. 74
9.4.1 Valores del regulador del lazo interno ........................................................................................... 74 9.4.2 Valores del regulador del lazo externo ........................................................................................... 75
9.5 ADQUISICIÓN DATOS CONTROL ...................................................................................................................... 76 9.5.1 Corriente de la bobina (I_sensor) ................................................................................................... 76 9.5.2 Velocidad de respuesta del Sistema con lazo interno .................................................................... 78
9.6 TIEMPOS DE OCUPACIÓN DEL MICRO ............................................................................................................... 79 10. PROGRAMACIÓN DEL MICROPROCESADOR ........................................................................................ 82

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 3 de 90
Alumno: Luis David Villa Casal
1. Objetivos y alcance El objetivo del presente trabajo consiste en la realización de un prototipo operativo de un
convertidor CC/CC que obtenga la máxima potencia de un panel solar y la suministre a un
bus de continua de tensión fija.
Figura 1.1. - Esquema simplificado de bloques. Dentro del rectángulo en línea discontinua se englobaría la parte a realizar en el
presente proyecto.
El alcance del proyecto engloba a partir del conector del panel solar y hasta el bus de
continua, no incluido. El sistema a diseñar debe ser capaz de adecuarse a las variaciones
típicas de tensión que presenta un panel solar en función del nivel de intensidad lumínica
incidente y también que el sistema pueda adecuarse a las ligeras variaciones de tensión del
bus, de forma que mantenga una tensión adecuada de salida que permita una interacción
correcta entre nuestro sistema CC/CC y el bus en el que se inyecta la potencia.
Todo lo anterior debe conseguirse con un nivel de eficiencia y vida útil razonable, acordes
con el estado actual de la técnica.
PLACA DE CONTROL
Rea
limen
taci
ón
PANEL SOLAR
PLACA DE POTENCIA
225V DC
UNIVERSIDAD DE OVIED
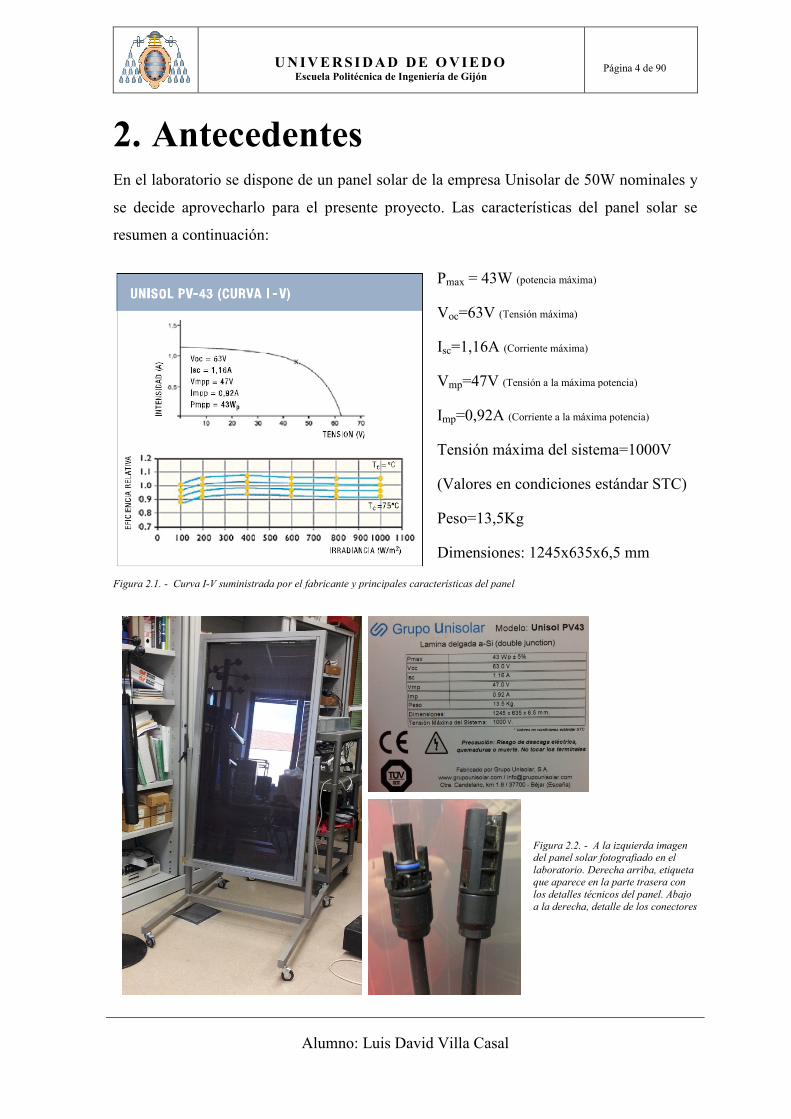
2. AntecedentesEn el laboratorio se dispone de un panel solar de la empresa Unisolar de 50W nominales y
se decide aprovecharlo para el presente proyecto. Las características del panel solar se
resumen a continuación:
Figura 2.1. - Curva I-V suministrada por el fabricante y principales características del pane
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
Antecedentes se dispone de un panel solar de la empresa Unisolar de 50W nominales y
se decide aprovecharlo para el presente proyecto. Las características del panel solar se
Pmax = 43W (potencia máxima)
Voc=63V (Tensión máxima)
Isc=1,16A (Corriente máxima)
Vmp=47V (Tensión a la máxima potencia)
Imp=0,92A (Corriente a la máxima potencia)
Tensión máxima del sistema=1000V
(Valores en condiciones estándar STC)
Peso=13,5Kg
Dimensiones: 1245x635x6,5
V suministrada por el fabricante y principales características del panel
Figura 2.2. del panel solar fotografiado en el
laboratorio. Derecha arriba, etiqueta que aparece en la parte trasera co
los detalles técnicos del panel. Abajo
a la derecha, detalle de los conectores
Página 4 de 90
se dispone de un panel solar de la empresa Unisolar de 50W nominales y
se decide aprovecharlo para el presente proyecto. Las características del panel solar se
(potencia máxima)
(Tensión máxima)
(Corriente máxima)
(Tensión a la máxima potencia)
(Corriente a la máxima potencia)
Tensión máxima del sistema=1000V
(Valores en condiciones estándar STC)
Dimensiones: 1245x635x6,5 mm
Figura 2.2. - A la izquierda imagen del panel solar fotografiado en el
laboratorio. Derecha arriba, etiqueta que aparece en la parte trasera con
los detalles técnicos del panel. Abajo
a la derecha, detalle de los conectores

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 5 de 90
Alumno: Luis David Villa Casal
El bus de continua, que no forma parte del proyecto, necesita 450VDC para poder generar
de forma conveniente mediante un inversor, una tensión alterna eficaz de 230VAC@50Hz.
Debido a limitaciones técnicas impuestas por la topología elegida que se explicarán más
adelante, para obtener la tensión de 450VDC, la dividiremos en dos conversores que nos
suministrarán cada uno la mitad de la tensión, 225VDC. Ambos conversores son
prácticamente análogos. Al tratarse de un proyecto eminentemente de carácter educativo,
nos centraremos en el diseño y construcción de uno sólo.
Figura 2.3. - Esquema completo para obtener tensión de 230VAC convencional a partir de paneles solares. Dentro de la línea
punteada figura la parte que se realizará dentro del presente proyecto. En este diagrama de bloques podemos observar dónde se integra nuestra solución dentro del conjunto completo.
En el laboratorio sólo disponemos de un panel solar, como se comentó antes. En un
sistema comercial se conectan más paneles, para obtener una potencia razonable en la
instalación, pero la idea fundamental y los bloques que constituyen el sistema serían
análogos.
PANEL SOLAR 1
CC/CC 1
PANEL SOLAR 2
CC/CC 2
BUS 450VDC
INVERSOR 230V
AC
225V DC
225V DC

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 6 de 90
Alumno: Luis David Villa Casal
3. Elección de la topología del convertidor
En principio destacan dos topologías para la realización de la placa de potencia: Boost
Converter y Flyback. Ambas destacan por su sencillez y su idoneidad.
La potencia máxima que suministra el panel es de 43W, por lo que obtenemos un margen
razonable de seguridad diseñando el convertidor DC/DC para 50W nominales.
Debido a la alta relación entre la tensión de entrada y la de salida la topología Boost-
Converter presenta un reducido ancho de banda proporcional en comparación con la
flyback:
Figura 3.1. - Topología boost-converter
Su ecuación para la tensión de salida viene dado por la expresión 3.1:
= ∙ − (3.1) Donde es la tensión de salida, la de entrada, T el periodo de conmutación y tce, el
tiempo que permanece cerrado el dispositivo conmutador. La tensión de entrada es de 47
voltios (tensión del panel a la máxima potencia) y la de salida 225V; la frecuencia de
conmutación 50KHz. Para estos parámetros de diseño, el tiempo durante el cual el
elemento interruptor está cerrado es:
225 = 47 ∙ 2 × 102 × 10 − → = 1,582 × 10
Um E
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 7 de 90
Alumno: Luis David Villa Casal
Es decir, para una frecuencia de conmutación de 50kHz, el periodo dura 20µs y de ese
tiempo el elemento conmutador estaría en conducción durante 15,82µs (79,1% del tiempo),
lo que nos dejaría sólo una pequeña banda proporcional para la regulación.
Lo ideal es que para el punto medio de trabajo (47V a la entrada) obtengamos un ciclo de
trabajo del 50%. Para ello necesitamos un grado más de libertad que se obtiene con el uso
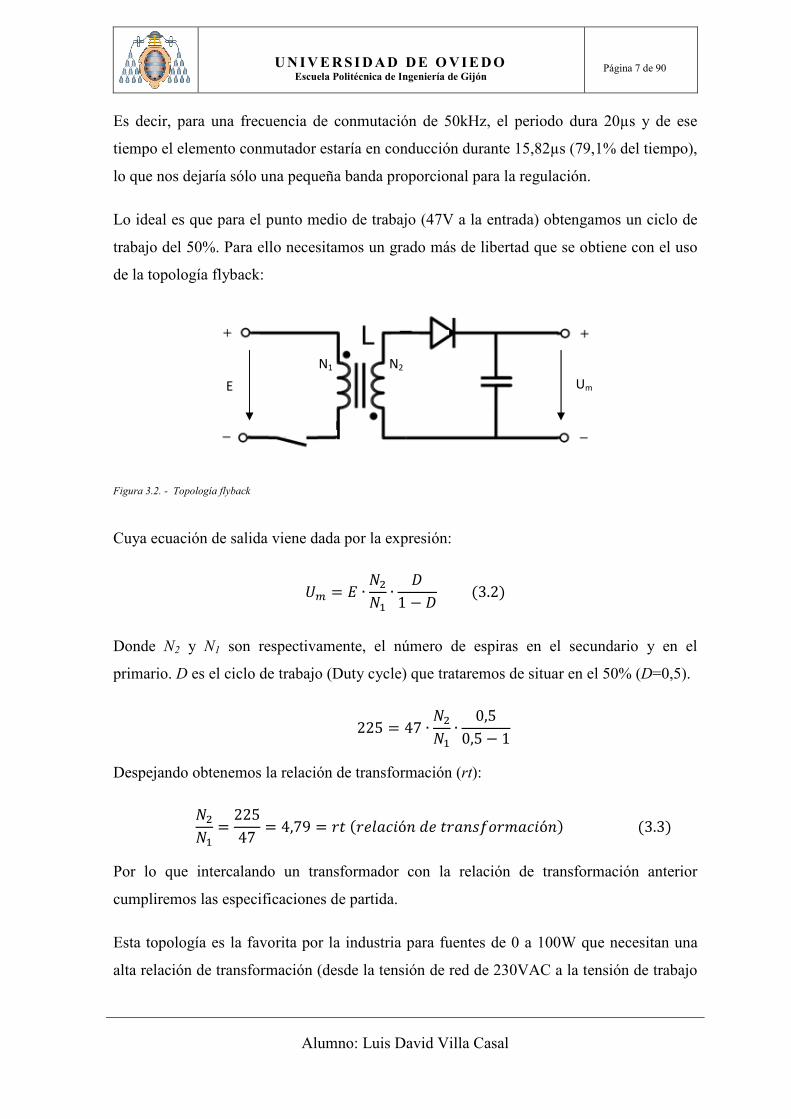
de la topología flyback:
Figura 3.2. - Topología flyback
Cuya ecuación de salida viene dada por la expresión:
= ∙ ∙ 1 − (3.2) Donde N2 y N1 son respectivamente, el número de espiras en el secundario y en el
primario. D es el ciclo de trabajo (Duty cycle) que trataremos de situar en el 50% (D=0,5).
225 = 47 ∙ ∙ 0,50,5 − 1
Despejando obtenemos la relación de transformación (rt):
= 22547 = 4,79 = "("#$%&'ó)*#"%)+,"-%&'ó))(3.3) Por lo que intercalando un transformador con la relación de transformación anterior
cumpliremos las especificaciones de partida.
Esta topología es la favorita por la industria para fuentes de 0 a 100W que necesitan una
alta relación de transformación (desde la tensión de red de 230VAC a la tensión de trabajo
Um E
N1 N2
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 8 de 90
Alumno: Luis David Villa Casal
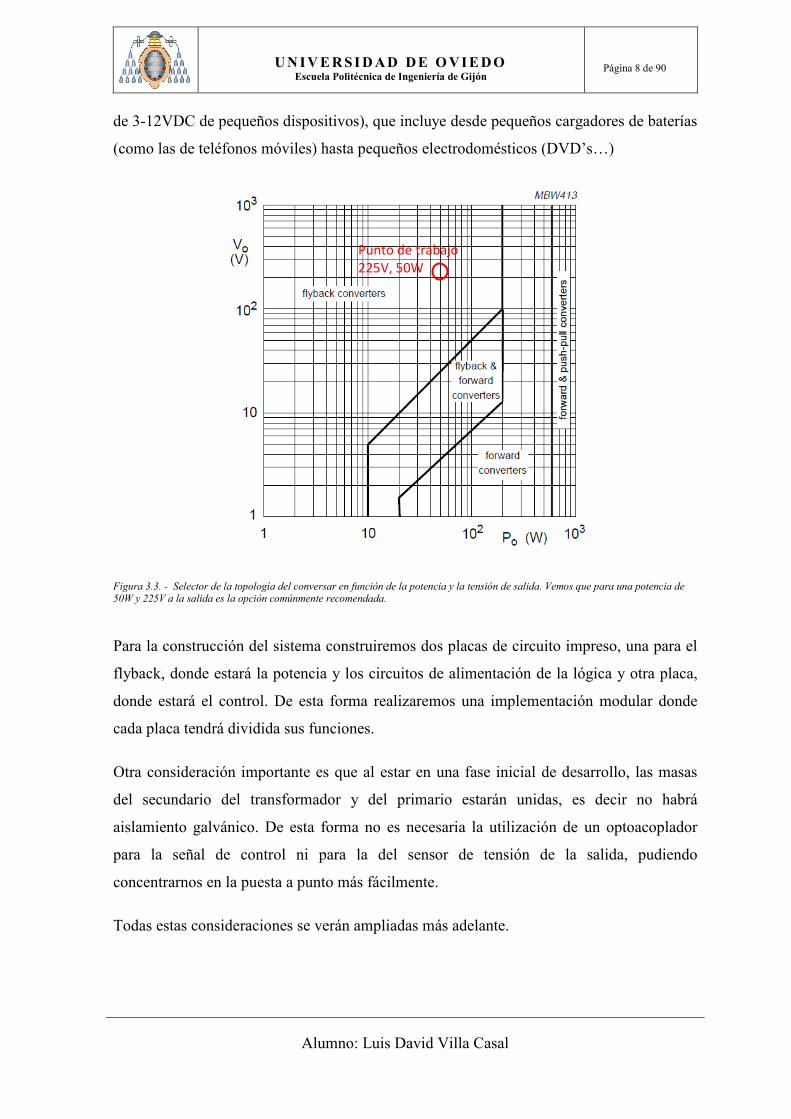
de 3-12VDC de pequeños dispositivos), que incluye desde pequeños cargadores de baterías
(como las de teléfonos móviles) hasta pequeños electrodomésticos (DVD’s…)
Figura 3.3. - Selector de la topología del conversar en función de la potencia y la tensión de salida. Vemos que para una potencia de 50W y 225V a la salida es la opción comúnmente recomendada.
Para la construcción del sistema construiremos dos placas de circuito impreso, una para el
flyback, donde estará la potencia y los circuitos de alimentación de la lógica y otra placa,
donde estará el control. De esta forma realizaremos una implementación modular donde
cada placa tendrá dividida sus funciones.
Otra consideración importante es que al estar en una fase inicial de desarrollo, las masas
del secundario del transformador y del primario estarán unidas, es decir no habrá
aislamiento galvánico. De esta forma no es necesaria la utilización de un optoacoplador
para la señal de control ni para la del sensor de tensión de la salida, pudiendo
concentrarnos en la puesta a punto más fácilmente.
Todas estas consideraciones se verán ampliadas más adelante.
Punto de trabajo 225V, 50W

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 9 de 90
Alumno: Luis David Villa Casal
4. Esquema y componentes de la topología flyback
El esquema básico de la topología flyback es el visto en la figura 3.2, al que le añadiremos
un condensador a la entrada (C_IN) para reducir el rizado y así adecuar el circuito a la
función que va a desempeñar. Un rizado excesivo a la entrada del convertidor podría
provocar daños al panel solar.
El resultado es el que se muestra en la siguiente figura:
Figura 4.1. - Esquema básico del convertidor flyback que implementaremos con el único dato conocido hasta el momento, la relación
de transformación. RL representa la carga. Como elemento de corte elegiremos un MOSFET. La frecuencia de conmutación es de 50kHz.
El funcionamiento es el siguiente: con el transistor cerrado, la inductancia del primario N1,
que se escogerá con un valor adecuado, acumula energía magnética mientras el devanado
N2 desarrolla una tensión negativa y se mantiene al corte debido al diodo. Cuando se abre
el interruptor se invierten por la Ley de Lenz las polaridades en los devanados de la
bobina, que descarga la energía almacenada a través de N2 y el diodo hacia el condensador
de filtro y la carga RL.
La inductancia magnetizante, compuesta por el devanado N1, es el almacén energético que
permite trasvasar energía de la fuente a la carga, actuando los dos devanados no como un
transformador aunque a veces nos referiramos a ellos como tal, sino como una bobina con

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 10 de 90
Alumno: Luis David Villa Casal
dos devanados, uno de carga N1 y otro de descarga N2, aunque se suponen perfectamente
acoplados, de forma que no se pierde energía en la transferencia.
Este circuito puede funcionar en modo discontinuo o continuo, es decir la
desmagnetización de la bobina puede ser total o parcial. Para nuestra aplicación elegiremos
el modo continuo, para mantener un bajo nivel de rizado.
Si visualizamos las formas de onda de corriente y tensión del circuito de la figura 4.1,
podemos ver las formas de onda características del flyback.
Figura 4.2. - Esquema donde se indica los puntos donde visualizamos las formas de onda de la corriente y la tensión.
Figura 4.3. - Formas de onda del circuito.
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 11 de 90
Alumno: Luis David Villa Casal
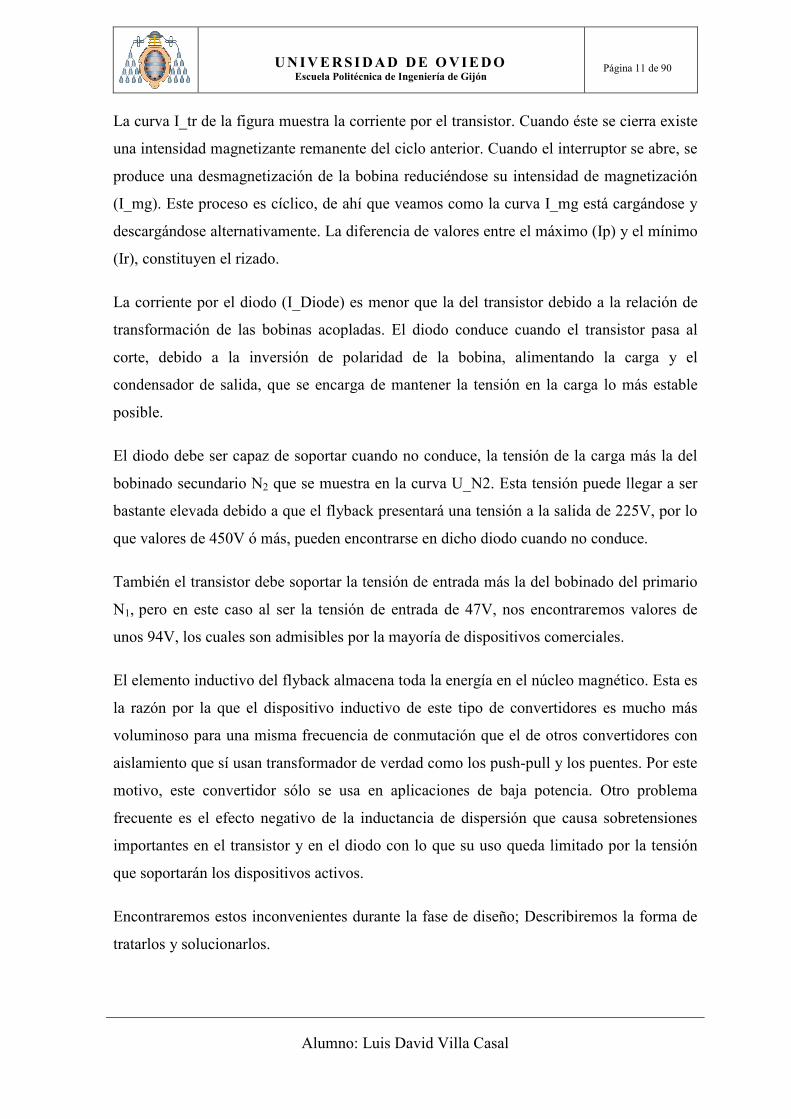
La curva I_tr de la figura muestra la corriente por el transistor. Cuando éste se cierra existe
una intensidad magnetizante remanente del ciclo anterior. Cuando el interruptor se abre, se
produce una desmagnetización de la bobina reduciéndose su intensidad de magnetización
(I_mg). Este proceso es cíclico, de ahí que veamos como la curva I_mg está cargándose y
descargándose alternativamente. La diferencia de valores entre el máximo (Ip) y el mínimo
(Ir), constituyen el rizado.
La corriente por el diodo (I_Diode) es menor que la del transistor debido a la relación de
transformación de las bobinas acopladas. El diodo conduce cuando el transistor pasa al
corte, debido a la inversión de polaridad de la bobina, alimentando la carga y el
condensador de salida, que se encarga de mantener la tensión en la carga lo más estable
posible.
El diodo debe ser capaz de soportar cuando no conduce, la tensión de la carga más la del
bobinado secundario N2 que se muestra en la curva U_N2. Esta tensión puede llegar a ser
bastante elevada debido a que el flyback presentará una tensión a la salida de 225V, por lo
que valores de 450V ó más, pueden encontrarse en dicho diodo cuando no conduce.
También el transistor debe soportar la tensión de entrada más la del bobinado del primario
N1, pero en este caso al ser la tensión de entrada de 47V, nos encontraremos valores de
unos 94V, los cuales son admisibles por la mayoría de dispositivos comerciales.
El elemento inductivo del flyback almacena toda la energía en el núcleo magnético. Esta es
la razón por la que el dispositivo inductivo de este tipo de convertidores es mucho más
voluminoso para una misma frecuencia de conmutación que el de otros convertidores con
aislamiento que sí usan transformador de verdad como los push-pull y los puentes. Por este
motivo, este convertidor sólo se usa en aplicaciones de baja potencia. Otro problema
frecuente es el efecto negativo de la inductancia de dispersión que causa sobretensiones
importantes en el transistor y en el diodo con lo que su uso queda limitado por la tensión
que soportarán los dispositivos activos.
Encontraremos estos inconvenientes durante la fase de diseño; Describiremos la forma de
tratarlos y solucionarlos.

UNIVERSIDAD DE OVIED
5. Cálculo del flyback
Según los datos del fabricante Philips
para potencias comprendidas entre 50W y 100W. No obstante debido a la elevada
y a la frecuencia de trabajo de 50KHz,
especificados para mayores
Tabla 5.1.- Núcleos recomendados por el fabricante Philips según la potencia
El primer núcleo que cumple este requisito
100W a 200W. Sin embargo elegiremos
200W a 500W. Este núcleo pres
sistema que suministrará energía y que funcionará permanentemente
que sea eficiente energéticamente
verá amortizado posteriormente con un mayor suministro de energía eléctrica.
Suponemos a la entrada del circuito una tensión media suministrada por el panel
47V y una tensión a la salida
consideraremos “estándar” fijaremos un ciclo de trabajo (D) del 50% para optimizar el
i Suministrados en su manual “Soft Ferrites Datasheets 1998” sobre productos magnéticos. El dimensionado de los núcleos y de los carretes permanece constante en la actualidad también en otros fabricantes.
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
lculo del transformador
fabricante Philipsi los núcleos ETD29 y ETD34 están
para potencias comprendidas entre 50W y 100W. No obstante debido a la elevada
a la frecuencia de trabajo de 50KHz, nos veremos obligados a utilizar
mayores potencias, para evitar la saturación del núcleo.
Núcleos recomendados por el fabricante Philips según la potencia entregada por el circuito a 100KHz.
que cumple este requisito es el ETD39, recomendado pa
Sin embargo elegiremos el ETD44, que es recomendado para potencias de
200W a 500W. Este núcleo presenta el mejor balance entre precio y pérdidas. En un
energía y que funcionará permanentemente, es muy i
que sea eficiente energéticamente. Un mayor desembolso inicial en un núcleo mayor, se
verá amortizado posteriormente con un mayor suministro de energía eléctrica.
a la entrada del circuito una tensión media suministrada por el panel
47V y una tensión a la salida (Um) de 225V. Para estas condiciones de trabajo que
consideraremos “estándar” fijaremos un ciclo de trabajo (D) del 50% para optimizar el
Suministrados en su manual “Soft Ferrites Datasheets 1998” sobre productos magnéticos. El
dimensionado de los núcleos y de los carretes permanece constante en la actualidad también en
Página 12 de 90
transformador
están recomendados
para potencias comprendidas entre 50W y 100W. No obstante debido a la elevada corriente
nos veremos obligados a utilizar núcleos
, para evitar la saturación del núcleo.
entregada por el circuito a 100KHz.
es el ETD39, recomendado para potencias de
el ETD44, que es recomendado para potencias de
entre precio y pérdidas. En un
es muy importante
. Un mayor desembolso inicial en un núcleo mayor, se
verá amortizado posteriormente con un mayor suministro de energía eléctrica.
a la entrada del circuito una tensión media suministrada por el panel (E) de
Para estas condiciones de trabajo que
consideraremos “estándar” fijaremos un ciclo de trabajo (D) del 50% para optimizar el
Suministrados en su manual “Soft Ferrites Datasheets 1998” sobre productos magnéticos. El dimensionado de los núcleos y de los carretes permanece constante en la actualidad también en

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 13 de 90
Alumno: Luis David Villa Casal
ancho de banda proporcional. La relación de transformación ." = /0/12 se puede hallar
mediante la función de transferencia para un circuito flyback.i
= ∙ ∙ 1 − (5.1) Sustituyendo los valores anteriores nos da el siguiente resultado:
" = = 22547 = 4,787Fijamos un valor razonable de rizado en la bobina del primario del 25%. La corriente
media máxima suministrada por el panel es de 1,16A. Con un ciclo de trabajo del 50% y
sin rizado, la forma de onda de la corriente a la entrada del primario del transformador
flyback tendría el siguiente aspecto:
Figura 5.1. - Sin rizado y con un ciclo de trabajo del 50%, la corriente media de 1,16A pasa a tener un máximo de 2,32A al conducir la
mitad del tiempo.
La variación de corriente (∆I) para un rizado del 25% es:
∆4 = 4 ∙ "'5%*, = 2,32 ∙ 0,25 = 0,586(5.2) Distribuyéndose este rizado a partes iguales entre el valor superior y el inferior tenemos el
valor máximo de corriente por la bobina (Ip) y el inferior (Ir):
47 = 4 + ∆42 = 2,32 + 0,29 = 2,616(5.3) i Ecuación obtenida en el libro de Salvador y Gualda Gil “Electrónica de Potencia” de Editorial Thomson.
2,32A
t (s)
I (A)
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 14 de 90
Alumno: Luis David Villa Casal
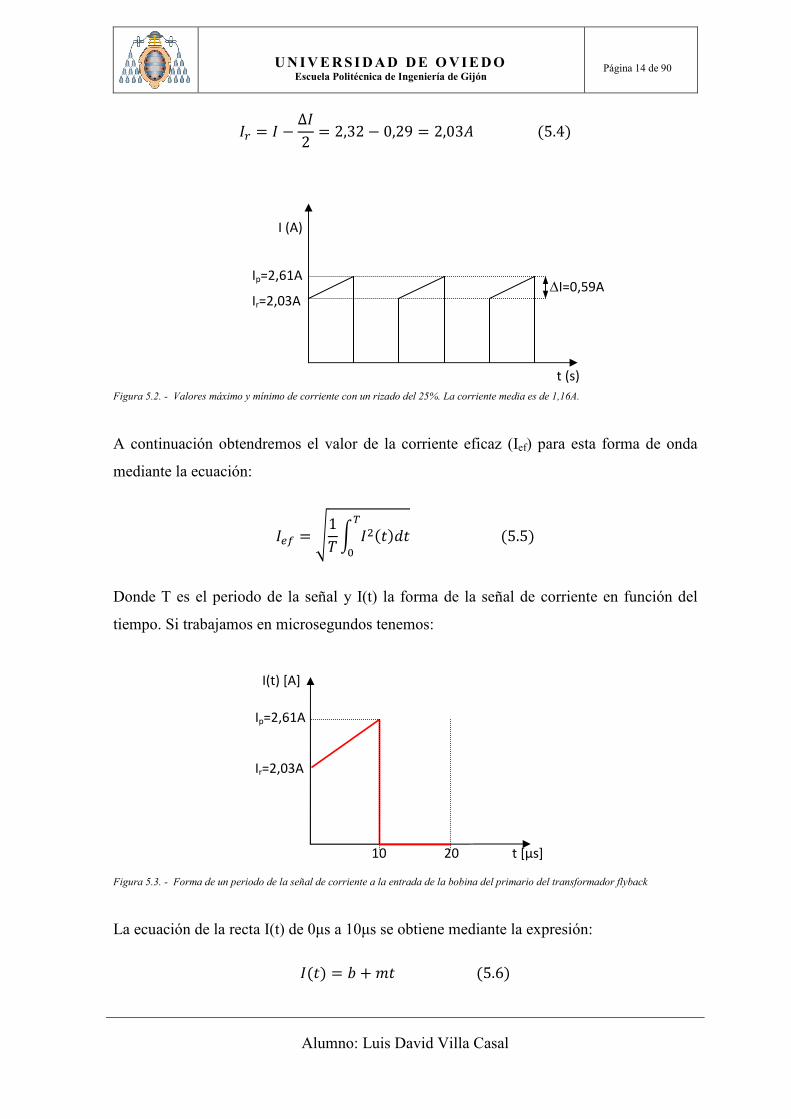
4: = 4 − ∆42 = 2,32 − 0,29 = 2,036(5.4)
Figura 5.2. - Valores máximo y mínimo de corriente con un rizado del 25%. La corriente media es de 1,16A.
A continuación obtendremos el valor de la corriente eficaz (Ief) para esta forma de onda
mediante la ecuación:
4; = <1= 4()*>? (5.5)
Donde T es el periodo de la señal y I(t) la forma de la señal de corriente en función del
tiempo. Si trabajamos en microsegundos tenemos:
Figura 5.3. - Forma de un periodo de la señal de corriente a la entrada de la bobina del primario del transformador flyback
La ecuación de la recta I(t) de 0µs a 10µs se obtiene mediante la expresión:
4() = @ + -(5.6)
Ir=2,03A
t (s)
I (A)
Ip=2,61A ∆I=0,59A
Ir=2,03A
t [μs]
I(t) [A]
Ip=2,61A
10 20

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 15 de 90
Alumno: Luis David Villa Casal
Donde b es el punto de corte con el eje de ordenadas y m la pendiente de la recta:
4() = 2,03 + 2,61 − 2,0310 − 0 = 2,03 + 0,058(5.7) La ecuación de la recta I(t) de 10µs a 20µs es I(t)=0, por lo que integraremos sólo entre 0µs
y 10µs. Sustituyendo en la ecuación 5.5, obtenemos el valor de la corriente eficaz:
4; = < 120= (2,03 + 0,058)()*?? = 1,486;(5.8)
Hasta aquí tenemos los siguientes valores del transformador:
Corriente de inicio de carga del primario Ir=2,03A @ rizado del 25%
Corriente al final de la carga del primario Ip=2,61A
Corriente media máxima a la entrada del primario: 1,16A
Corriente eficaz máxima a la entrada del primario: 1,48A
Relación de transformación: rt=225/47=4,79
Nos marcamos como objetivo unas pérdidas totales del 1% en el transformador flyback. A
una potencia nominal de 50W, el 1% corresponde a 0,5W de pérdidas. Con estos datos
pasamos a obtener el resto de las especificaciones para las bobinas del primario y del
secundario en los dos subcapítulos siguientes.
5.2 CÁLCULO DE LA INDUCTANCIA MAGNETIZANTE (VISTA DESDE EL PRIMARIO)
Mediante la ecuacióni 5.9 obtenemos el valor de la inductancia magnetizante (L):
47 = 4: + ∙ A (5.9) i Ecuación obtenida en el libro de Salvador y Gualda Gil “Electrónica de Potencia” de Editorial Thomson.
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 16 de 90
Alumno: Luis David Villa Casal
Donde tce es el tiempo que el elemento interruptor permanece cerrado (10µs); El resto de
parámetros ya se han definido en el apartado anterior. Despejando L y sustituyendo los
valores para la corriente máxima, que representa el caso más desfavorable posible,
obtenemos:
A = ∙ 47 − 4: = 47 ∙(10 ∙ 10B)2,61 − 2,03 = 810CD(5.10)
Refrendamos los cálculos analíticos con la simulación mediante POWERSIM. Con una
tensión de 47V y una corriente de 1,16A (peor caso de corriente) obtenemos una potencia
de entrada: 47x1,16=54,52W. Este valor está por encima de la potencia que nos puede
llegar a suministrar el panel que es de 43W±5%, pero nos sirve para sobredimensionar el
circuito en unos niveles de seguridad aceptables.
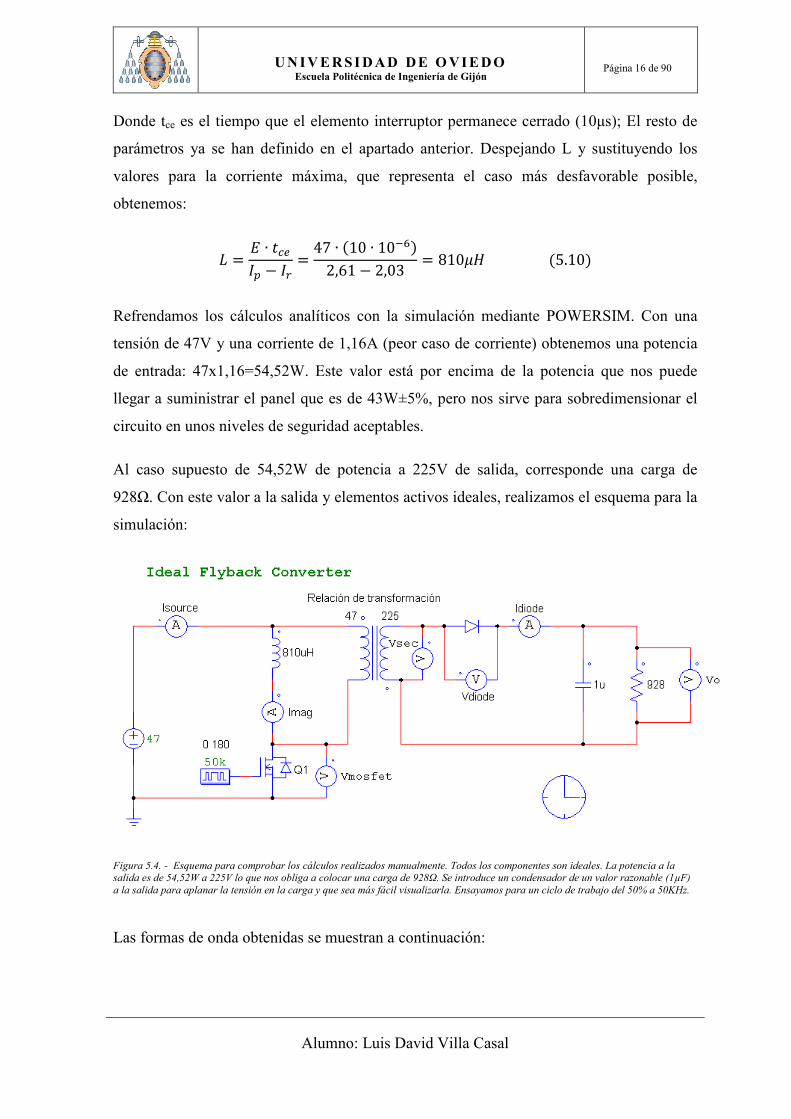
Al caso supuesto de 54,52W de potencia a 225V de salida, corresponde una carga de
928Ω. Con este valor a la salida y elementos activos ideales, realizamos el esquema para la
simulación:
Figura 5.4. - Esquema para comprobar los cálculos realizados manualmente. Todos los componentes son ideales. La potencia a la salida es de 54,52W a 225V lo que nos obliga a colocar una carga de 928Ω. Se introduce un condensador de un valor razonable (1µF)
a la salida para aplanar la tensión en la carga y que sea más fácil visualizarla. Ensayamos para un ciclo de trabajo del 50% a 50KHz.
Las formas de onda obtenidas se muestran a continuación:

UNIVERSIDAD DE OVIED
Figura 5.5. - Formas de onda con los valores calculados y con un comportamiento ideal del circuito. Los valores
e Ir=2,03 y la tensión de salida de 225V coinciden absolutamente con nuestros cálcufiltrada por el condensador. Isource es la corriente de salida que proporciona la fuente. I
magnetizante del primario. En la figura 5 se puede observar la ubicación en
5.3 CÁLCULO DE LA BOBINA D
Para este apartado nos apoyaremos en los apuntes de clase
de la herramienta de software
El método aproxima el circuito magn
con entrehierro.
5.3.1 DESCRIPCIÓN DEL N
Para el núcleo ETD44, el fabricante
i Estos apuntes son: “Lesson 9: Magnetic CompElectronics in renewable energy generation systemsand Power Systems” ii Esta herramienta de software es una hoja de cálculo desarrollada en MATHCAD que permite
predecir las pérdidas aproximadas de una bobina en función de la frecuencia de trabajo, teniendo en cuenta, entre otros, los efectos de proximidad y skin.iii Del fabricante PHILIPS, “Soft Ferrites Datasheets 1998”
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
Formas de onda con los valores calculados y con un comportamiento ideal del circuito. Los valores
de 225V coinciden absolutamente con nuestros cálculos analíticos. Vo es la tensión de salida una vez es la corriente de salida que proporciona la fuente. Imag es la corriente por la inductancia
magnetizante del primario. En la figura 5 se puede observar la ubicación en el esquema de los puntos de medida.
LCULO DE LA BOBINA DEL PRIMARIO
Para este apartado nos apoyaremos en los apuntes de clasei del Dr. Jorge García
de la herramienta de softwareii “Diseño óptimo de bobinas”.
El método aproxima el circuito magnético mediante un toroide de longitud equivalente l
ESCRIPCIÓN DEL NÚCLEO Y DEL CARRETE
ETD44, el fabricanteiii nos da los valores de los siguientes parámetros
Lesson 9: Magnetic Components Design” de la asignatura:
Electronics in renewable energy generation systems” del Master: “Electrical Energy Conversion
Esta herramienta de software es una hoja de cálculo desarrollada en MATHCAD que permite cir las pérdidas aproximadas de una bobina en función de la frecuencia de trabajo,
teniendo en cuenta, entre otros, los efectos de proximidad y skin. Del fabricante PHILIPS, “Soft Ferrites Datasheets 1998”
Página 17 de 90
Formas de onda con los valores calculados y con un comportamiento ideal del circuito. Los valores de corriente Ip=2,61
es la tensión de salida una vez es la corriente por la inductancia
el esquema de los puntos de medida.
del Dr. Jorge García García y
ético mediante un toroide de longitud equivalente le
nos da los valores de los siguientes parámetros:
” de la asignatura: “Industrial Electrical Energy Conversion
Esta herramienta de software es una hoja de cálculo desarrollada en MATHCAD que permite cir las pérdidas aproximadas de una bobina en función de la frecuencia de trabajo,
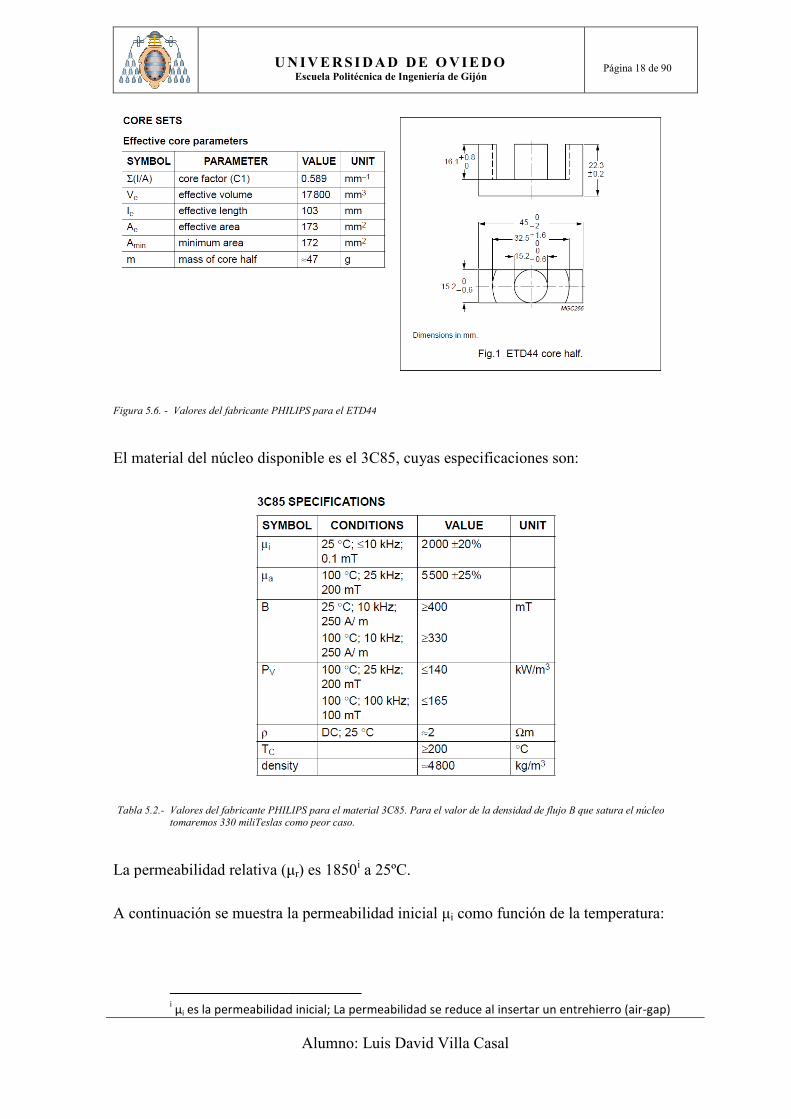
UNIVERSIDAD DE OVIED
Figura 5.6. - Valores del fabricante PHILIPS para el ETD44
El material del núcleo disponible es el 3C85, cuyas especificaciones son:
Tabla 5.2.- Valores del fabricante PHILIPS para el material 3C85. Para el valor de la densidad de flujo B que satura el núcleo tomaremos 330 miliTeslas como peor caso.
La permeabilidad relativa (µ
A continuación se muestra la
i μi es la permeabilidad inicial; La permeabilid
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
Valores del fabricante PHILIPS para el ETD44
l núcleo disponible es el 3C85, cuyas especificaciones son:
Valores del fabricante PHILIPS para el material 3C85. Para el valor de la densidad de flujo B que satura el núcleo tomaremos 330 miliTeslas como peor caso.
La permeabilidad relativa (µr) es 1850i a 25ºC.
muestra la permeabilidad inicial µi como función de la temperatura:
es la permeabilidad inicial; La permeabilidad se reduce al insertar un entrehierro (air
Página 18 de 90
l núcleo disponible es el 3C85, cuyas especificaciones son:
Valores del fabricante PHILIPS para el material 3C85. Para el valor de la densidad de flujo B que satura el núcleo
como función de la temperatura:
ad se reduce al insertar un entrehierro (air-gap)

UNIVERSIDAD DE OVIED
Figura 5.7. - La permeabilidad inicial como función de la temperaturatemperatura de Curie pierde sus propiedades m
5.3.2 CÁLCULO DE LA BOBINA
Utilizando la hoja de cálculo “Diseño óptimo de bobinas” realizada en MATHCAD
podemos iterar rápidamente para obtener los valores adecuados de espiras.
En esta hoja de cálculo debemos especific
• Frecuencia de trabajo
• Material del núcleo
• Tipo de carrete
• Parámetros
Ief)
• Valor de la inductancia
• Factor de ventana (Aprovechamiento del espacio disponible)
• Tipo de ent
i Hoja de cálculo realizada en MATHCAD “Diseño óptimo de bobinas”
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
La permeabilidad inicial como función de la temperatura para el material 3C85. En cuanto un material alcanza la temperatura de Curie pierde sus propiedades magnéticas.
CÁLCULO DE LA BOBINA DEL PRIMARIO MEDIANTE MATHCAD
Utilizando la hoja de cálculo “Diseño óptimo de bobinas” realizada en MATHCAD
podemos iterar rápidamente para obtener los valores adecuados de espiras.
En esta hoja de cálculo debemos especificar los parámetros:
Frecuencia de trabajo
Material del núcleo
Tipo de carrete
arámetros principales de la corriente que atraviesa la bobina
Valor de la inductancia
Factor de ventana (Aprovechamiento del espacio disponible)
Tipo de entrehierro
Hoja de cálculo realizada en MATHCAD “Diseño óptimo de bobinas”
Página 19 de 90
. En cuanto un material alcanza la
E MATHCADi
Utilizando la hoja de cálculo “Diseño óptimo de bobinas” realizada en MATHCAD
podemos iterar rápidamente para obtener los valores adecuados de espiras.
de la corriente que atraviesa la bobina (Ip, Ipico-pico,
Factor de ventana (Aprovechamiento del espacio disponible)
UNIVERSIDAD DE OVIED
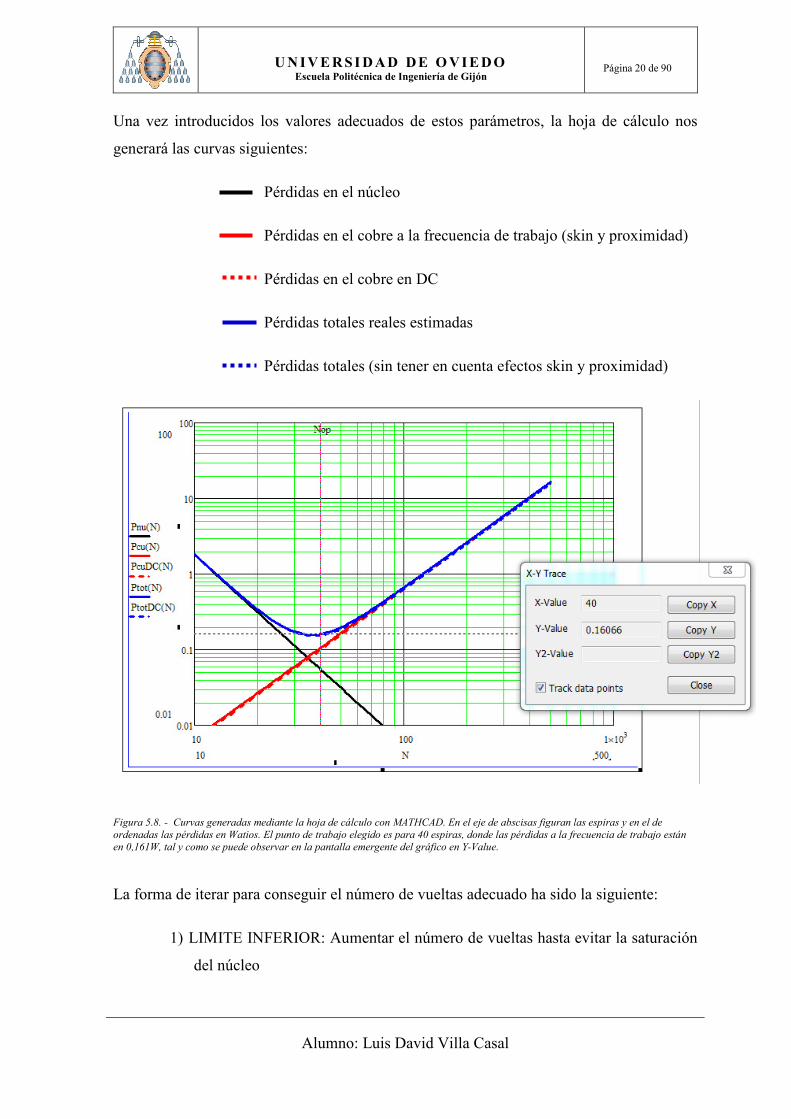
Una vez introducidos los valores adecuados de estos parámetros, la hoja de cálculo nos
generará las curvas siguientes:
Pérdidas en el núcleo
Pérdidas en el cobre
Pérdidas en el cobre
Pérdidas totales
Pérdidas totales
Figura 5.8. - Curvas generadas mediante la hoja de cálculo con MATHCAD. En el eje de abscisas figuran las espiras y en el de
ordenadas las pérdidas en Watios. El pun
en 0,161W, tal y como se puede observar en la pantalla emergente del gráfico en Y
La forma de iterar para conseguir el número de vueltas adecuado
1) LIMITE INFERIOR: Aumentar
del núcleo
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
Una vez introducidos los valores adecuados de estos parámetros, la hoja de cálculo nos
las curvas siguientes:
Pérdidas en el núcleo
Pérdidas en el cobre a la frecuencia de trabajo (skin y proximidad)
Pérdidas en el cobre en DC
Pérdidas totales reales estimadas
Pérdidas totales (sin tener en cuenta efectos skin y proximidad)
Curvas generadas mediante la hoja de cálculo con MATHCAD. En el eje de abscisas figuran las espiras y en el de
ordenadas las pérdidas en Watios. El punto de trabajo elegido es para 40 espiras, donde las pérdidas a la frecuencia de trabajo están
en 0,161W, tal y como se puede observar en la pantalla emergente del gráfico en Y-Value.
para conseguir el número de vueltas adecuado ha sido
LIMITE INFERIOR: Aumentar el número de vueltas hasta evitar
Página 20 de 90
Una vez introducidos los valores adecuados de estos parámetros, la hoja de cálculo nos
a la frecuencia de trabajo (skin y proximidad)
(sin tener en cuenta efectos skin y proximidad)
Curvas generadas mediante la hoja de cálculo con MATHCAD. En el eje de abscisas figuran las espiras y en el de
to de trabajo elegido es para 40 espiras, donde las pérdidas a la frecuencia de trabajo están
ha sido la siguiente:
hasta evitar la saturación

UNIVERSIDAD DE OVIED
2) LIMITE SUPERIOR: Reducir el número de vueltas para adecuarnos al área de
ventana disponible.
3) Dentro de los márgenes fijados por las dos condiciones anterio
punto con menos pérdidas.
Figura 5.9. - Factores limitantes en la elección del número de espiras adecuado para la bobina
Los valores obtenidos con la simulación son:
Figura 5.10. - La densidad de Flujo máximo es de 306mT; El límite del material está en 330peores condiciones de trabajo. El diámetro skin recomendado es menor a 0,5475mm
aprovechar el 100% de cobre y aumentaremos el número de hilos a 6 para no perder área to
de unas décimas de milímetro. El valor exacto lo encontraremos mediante ensayo hasta obtene(810µH).
Pocas espiras: El núcleo satura
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
LIMITE SUPERIOR: Reducir el número de vueltas para adecuarnos al área de
ventana disponible.
Dentro de los márgenes fijados por las dos condiciones anterio
punto con menos pérdidas.
Factores limitantes en la elección del número de espiras adecuado para la bobina
Los valores obtenidos con la simulación son:
La densidad de Flujo máximo es de 306mT; El límite del material está en 330mT, por tanto, el núcleo no satura para las peores condiciones de trabajo. El diámetro skin recomendado es menor a 0,5475mm, tomaremos el valor comercial de 0,5mm
aprovechar el 100% de cobre y aumentaremos el número de hilos a 6 para no perder área total de sección. El valor del entrehierro es
de unas décimas de milímetro. El valor exacto lo encontraremos mediante ensayo hasta obtener el valor requerido
Demasiadas espiras: No caben en el área disponible
Elegir el punto de menores pérdidas
Página 21 de 90
LIMITE SUPERIOR: Reducir el número de vueltas para adecuarnos al área de
Dentro de los márgenes fijados por las dos condiciones anteriores, elegir el
mT, por tanto, el núcleo no satura para las , tomaremos el valor comercial de 0,5mm para
. El valor del entrehierro es
r el valor requerido de la inductancia
N espiras

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 22 de 90
Alumno: Luis David Villa Casal
Resumiendo, la bobina del primario será:
Espiras: 40
Diámetro hilo: 0,5 mm
Número de hilos: 6
5.3.3 CÁLCULO DE LA BOBINA DEL PRIMARIO ANALÍTICAMENTE
En el subcapítulo 5.1, nos habíamos marcado como objetivo unas pérdidas totales máximas
del 1% en el transformador, es decir, 0,5W. Repartiremos estas pérdidas a partes iguales
entre el primario y el secundario dejando 0,25W para cada uno.
Las pérdidas totales (PL) en una bobina (L) son la suma de las pérdidas en el núcleo (Pcore)
más las pérdidas en el cobre (Pcu):
EF = EG: + EH(5.11) Suponiendo unas pérdidas aproximadamente iguales en el cobre y en el núcleo, estaremos
cerca del punto óptimo de trabajo de la bobina. Esto nos deja unas pérdidas de 0,125W en
el cobre y 0,125W en el núcleo para cumplir con la relación de la ecuación 5.11.
EF = 0,25I = EG: + EH = 0,125I + 0,125I
Figura 5.11. - Distribución de las pérdidas en el transformador flyback
Transformador flyback: Pérdidas totales 0,5W (1%)
Pérdidas primario: 0,25W
Pérdidas secundario: 0,25W
Pérdidas en el cobre: 0,125W Pérdidas en el núcleo: 0,125W
Pérdidas en el cobre: 0,125W Pérdidas en el núcleo: 0,125W
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 23 de 90
Alumno: Luis David Villa Casal
Esta situación no corresponde a los resultados obtenidos mediante MATHCAD, donde
para el primario teníamos las siguientes pérdidas:
Pcore=0,055W
Pcu=0,101W
Por lo que obtendremos resultados distintos. De ahí la necesidad de iterar. Realizando los
cálculos analíticamente el proceso de iteración es largo y tedioso y gracias a los programas
informáticos y las hojas de cálculo que aumentan la capacidad de procesamiento, se puede
llegar a la solución óptima de forma rápida.
No obstante a modo de ejemplo, realizaremos los cálculos manualmente para demostrar
cómo se realizarían y su adecuación a los resultados obtenidos mediante MATHCAD.
Por lo tanto, seguiremos con nuestra suposición de pérdidas totales de 0,5W.
Definimos a continuación Pv como las pérdidas en el núcleo (Pcore) entre el volumen del
núcleo (Ve).
EJ = EG:K = 0,125I17800--L = 0,125 ∙ 10LMI17800 ∙ 10N-L = 7,022MI-L (5.12) Lo que no es otra cosa que las pérdidas en el núcleo por unidad de volumen de material.
Las pérdidas en el núcleo son producidas por la componente alterna de la corriente, porque
sólo la corriente alterna y no la continua provoca pérdidas por histéresis. Con la corriente y
la frecuencia prefijadas por el diseño, al fijar un valor máximo de pérdidas, indirectamente
fijamos también un valor máximo de densidad de flujo B.
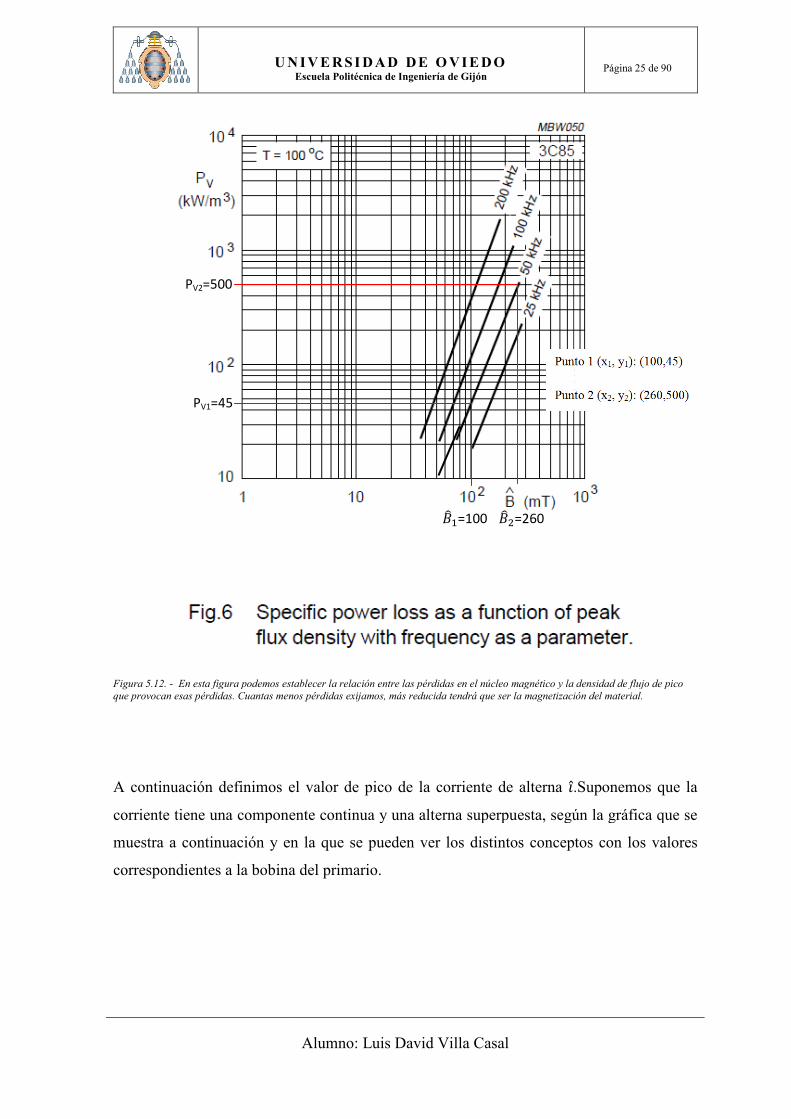
PHILIPS nos da la relación entre las pérdidas por unidad de volumen (Pv) y la densidad de
flujo de picoi (OP) para su material 3C85. Si entramos en la gráfica de la figura 5.12 con el
valor deseado de Pv obtenido en la ecuación 5.12, para la frecuencia de trabajo de 50KHz,
obtendremos la OP que produce esas pérdidas; Pero desafortunadamente la escala empieza
en Pv=10 KW/m3, por lo que no podremos buscar el valor directamente en la figura. i La densidad de flujo de pico OP se refiere al valor de pico de la componente alterna de la densidad de flujo B. El concepto es el mismo que el que se explica más adelante para el valor de pico de la corriente QR.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 24 de 90
Alumno: Luis David Villa Casal
Como la relación entre las pérdidas por unidad de volumen y la densidad de flujo de pico
es lineal, podemos hallar la ecuación de la recta correspondiente y obtener
matemáticamente para el valor requerido.
Elegimos dos puntos fácilmente identificables en la figura 5.12:
Punto 1 (x1, y1): (100,45)
Punto 2 (x2, y2): (260,500)
La ecuación de una recta en forma continua es:
S − SS − S = T − TT − T (5.13) Al estar los ejes en escala logarítmica la ecuación se transforma en:
log(S) − log(S)log(S) − log(S) = log(T) − log(T)log(T) − log(T)(5.14) log(S) − log(45)log(500) − log(45) = log(T) − log(100)log(260) − log(100) → log(S) = 2,52 ∙ log(T) − 3,388
Despejando x obtenemos:
T = 10XYZ([)\L,L]], (5.15) Para nuestro valor y(Pv)=7,022 la x(OP) resultante en la ecuación anterior es: 47,9mT.
Esta será nuestra densidad de flujo de pico.
UNIVERSIDAD DE OVIED
Figura 5.12. - En esta figura podemos establecer la relación entre las pérdidas en el núcleo magnético y la densidad de flujo de pico
que provocan esas pérdidas. Cuantas menos pér
A continuación definimos el valor de pico de la corriente de alterna
corriente tiene una componente continua y una alterna superpuesta, según la gráfica que se
muestra a continuación y en la que se pue
correspondientes a la bobina del primario.
PV1=45
PV2=500
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
En esta figura podemos establecer la relación entre las pérdidas en el núcleo magnético y la densidad de flujo de pico
que provocan esas pérdidas. Cuantas menos pérdidas exijamos, más reducida tendrá que ser la magnetización del material.
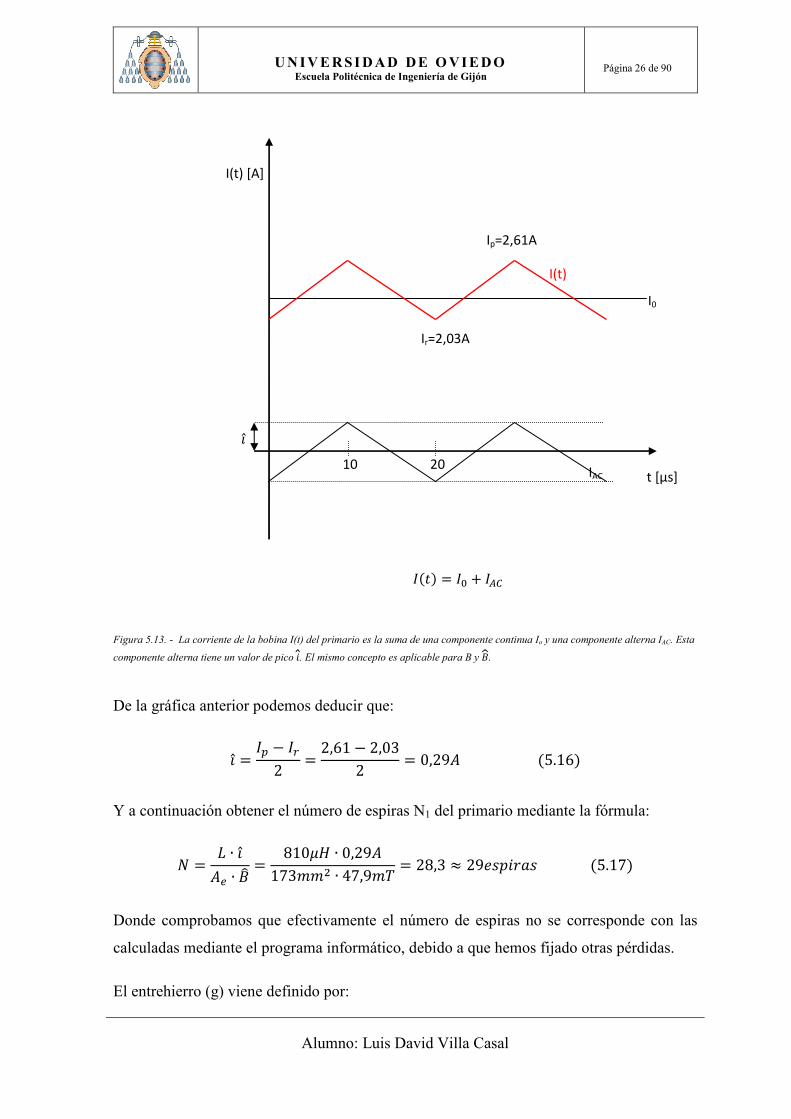
A continuación definimos el valor de pico de la corriente de alterna QR.Suponemos que la
corriente tiene una componente continua y una alterna superpuesta, según la gráfica que se
muestra a continuación y en la que se pueden ver los distintos conceptos con los valores
correspondientes a la bobina del primario.
OP=100 OP=260
Página 25 de 90
En esta figura podemos establecer la relación entre las pérdidas en el núcleo magnético y la densidad de flujo de pico
didas exijamos, más reducida tendrá que ser la magnetización del material.
R.Suponemos que la
corriente tiene una componente continua y una alterna superpuesta, según la gráfica que se
den ver los distintos conceptos con los valores
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 26 de 90
Alumno: Luis David Villa Casal
Figura 5.13. - La corriente de la bobina I(t) del primario es la suma de una componente continua Io y una componente alterna IAC. Esta
componente alterna tiene un valor de pico ' R. El mismo concepto es aplicable para B y O.
De la gráfica anterior podemos deducir que:
QR = 47 − 4:2 = 2,61 − 2,032 = 0,296(5.16) Y a continuación obtener el número de espiras N1 del primario mediante la fórmula:
= A ∙ QR6 ∙ OP =810CD ∙ 0,296173-- ∙ 47,9- = 28,3 ≈ 29#`'"%(5.17)
Donde comprobamos que efectivamente el número de espiras no se corresponde con las
calculadas mediante el programa informático, debido a que hemos fijado otras pérdidas.
El entrehierro (g) viene definido por:
Ir=2,03A
Ip=2,61A
I(t) [A]
t [μs] 10 20
I0
IAC
QR
I(t)
4() = 4? + 4ab

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 27 de 90
Alumno: Luis David Villa Casal
c = ∙ C? ∙ QROP − $C: = 29 ∙ 4d ∙ 10e ∙ 0,2947,9 ∙ 10L − 0,1031850 = 0,165--(5.18)
Generalmente el valor del entrehierro es sólo orientativo y mediante ensayo obtendremos
el ajuste idóneo de la bobina que nos permite obtener el valor exacto de la inductancia.
Ahora debemos comprobar si satura el núcleo. La saturación para este material está en
330mT. Para este cálculo debemos usar la máxima corriente que circulará por la bobina
(Imax), que en nuestro caso será Ip=2,61A
Ofg = 330- ≥ ∙ C? ∙ 'fg$C: + c= 29 ∙ 4d ∙ 10e ∙ 2,610,1031850 + 0,165 ∙ 10L = 431-(5.19)
Nuestra hipótesis de partida no es aplicable, ya que el núcleo satura al superarse el límite
del material de 330mT y entraríamos en un comportamiento no lineal de la bobina.
Llegado este punto en el cálculo manual, debemos reducir la densidad de flujo del núcleo y
para ello podemos adoptar dos estrategias: escoger un núcleo mayor o aumentar el número
de espiras. El núcleo ya es suficientemente grande, por lo que pasaremos a reducir las
pérdidas en el material aumentando el número de vueltas. Conociendo de antemano los
resultados de la simulación por ordenador, directamente partiremos de ellos para no entrar
en un proceso tedioso de iteración:
Pcore=0,055W
Pcu=0,101W
Sustituyendo el nuevo valor de pérdidas en el núcleo (Pcore) en 5.12:
EJ = EG:K = 0,055I17800--L = 0,055 ∙ 10LMI17800 ∙ 10N-L = 3,09MI-L
Si introducimos en la ecuación 5.15 el punto EJ = 3,09 ijk : T = 10XYZ([)\L,L]], → T = 34,58(5.15)
Valor que introducimos ahora en 5.17:

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 28 de 90
Alumno: Luis David Villa Casal
= A ∙ QR6 ∙ OP =810CD ∙ 0,296173-- ∙ 34,58- = 39,26 ≈ 40#`'"%(5.17)
El valor del número de espiras debe redondearse por exceso y obtenemos el mismo valor
que mediante MATHCAD.
Para el entrehierro recalculamos en 5.18:
c = ∙ C? ∙ QROP − $C: = 40 ∙ 4d ∙ 10e ∙ 0,2934,58 ∙ 10L − 0,1031850 = 0,365--(5.18)
Donde obtenemos un valor análogo al de la hoja de cálculo (0,374mm). Este valor sólo es
orientativo pues la práctica muestra que el valor exacto se obtiene mediante prueba y error
hasta obtener el valor de inductancia más próximo posible al deseado.
Comprobamos la saturación del núcleo:
Ofg ≥ ∙ C? ∙ 'fg$C: + c= 40 ∙ 4d ∙ 10e ∙ 2,610,1031850 + 3.65 ∙ 10l = 311-
Valor de nuevo muy similar (306mT) al obtenido por ordenador.
Para el diámetro del hilo debemos tener en cuenta el efecto skin a 50kHz. Mediante la
ecuación 5.20 encontramos el radio óptimo del conductor:
mnopq = 7,5r+(D5)(5.20) Donde el radio mnopq está expresado en centímetros y + en Hertzios:
mnopq = 7,5s50000 = 0,0335&- = 0,335--
El mayor diámetro (D) del hilo será:
= 2 ∙ mnopq = 2 ∙ 0,335 = 0,67--

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 29 de 90
Alumno: Luis David Villa Casal
La simulación nos ofrece un valor de 0,55mm de diámetro y es necesario indicar que esta
fórmula empírica tiene gran variabilidad de unos autores a otros. Si elegimos el valor más
restrictivo, estamos seguros de no desperdiciar área de cobre.
Habitualmente, cuando se diseña la bobina manualmente no se optimizan las pérdidas AC,
de lo contrario los cálculos manuales se alargarían y serían mucho más complejos. Lo
habitual es aprovechar toda el área de cobre disponible para minimizar la resistencia del
cobre en DC. El problema es que si se utilizan demasiadas capas superpuestas aparece otro
fenómeno propio de las bobinas multicapa, denominado efecto proximidadi.
La hoja de cálculo utilizada sí tiene en cuenta este fenómeno. A modo de ejemplo
realizaremos los cálculos para el primario.
El área de ventana para el carrete ETD44 tiene las siguientes medidas:
Figura 5.14. - Dimensiones del carrete ETD44
i El efecto de Proximidad es la tendencia de la corriente de viajar en otros patrones no deseables - vueltas o distribuciones concentradas - debido a la presencia de campos magnéticos generados por conductores cercanos. En transformadores e inductores, las pérdidas por el efecto de proximidad típicamente son predominantes sobre las pérdidas por el efecto skin. En una bobina multicapa, los campos magnéticos son creados por las capas adyacentes alterando la distribución de densidad de la corriente en las espiras con respecto a la situación sin la presencia de los campos magnéticos perturbadores.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 30 de 90
Alumno: Luis David Villa Casal
Inspeccionando las medidas comprobamos que el área de ventana Wd es:
It = 29,5 ∙ (32,3 − 17,5)2 = 218,3--
Podemos considerar el área efectiva máxima como el
40%i del total:
Ituvuwxyz = It ∙ 0,40 = 87,32--
Sin embargo, esta área está compartida tanto con el
primario, como con el secundario.
Distribuiremos equitativamente el área disponible entre los dos:
Ituvuwxyz(`"'-%"',) = Ituvuwxyz 2| = 43,66--
El área disponible por espira de primario (ocupando el máximo área es):
6"#%-áT'-%`,"#`'"%*#$`"'-%"', =Ituvuwxyz 2|
= 43,6640 = 1,0915--
Teniendo en cuenta que habíamos elegido hilo de 0,5mm de diámetro y que por geometría
su sección es de 0,196-- podemos obtener fácilmente el número máximo de hilos por
espira que podemos colocar:
º-áT. ℎ'$,`,"#`'"%*#$`"'-%"', = 6"#%-áT'-%`,"#`'"%*#$`"'-%"',#&&'ó)*#)ℎ'$,
º-áT. ℎ'$,`,"#`'"%*#$`"'-%"', = 1,09150,196 = 5,56 = 5ℎ'$,`,"#`'"%(max) (debemos truncar el resultado para no sobrepasar el área máxima)
i Habitualmente se suele indicar un factor del 30% como máximo. En el caso que nos ocupa donde el hilo es fino y hay cierta holgura hasta el límite físico en la bobina no contemplado en las medidas, podemos llegar hasta el 40%
Wd

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 31 de 90
Alumno: Luis David Villa Casal
Casualmente este valor de 5 hilos de 0,5mm de diámetro nos coincide con la hoja de
cálculo, quizás debido a que son pocas capas y el efecto proximidad no es demasiado
acusado.
Las pérdidas en el cobre (W) en corriente continua, vienen dadas por la ecuación:
EH = ' ∙ ∙ $n7p:f6n7p:f ∙ (5.21) Donde: $n7p:f es la longitud media de una espira, 6n7p:f es el área total de una espira,
incluyendo el número total de hilos por espira, N el número de espiras, es la resistividad
del cobre: 2,07 ∙ 10]Ω-, ' es la corriente eficaz que circula por la espira.
La longitud de una espira circular viene dado por la expresión:
$n7p:f = d ∙
El diámetro medio D de la espira podemos situarlo en torno a los 21mm:
$n7p:f = d ∙ 21 = 66--
Y recordando del subcapítulo 5.1 que la corriente eficaz ' = 1,486, sustituyendo en la
ecuación 5.21:
EH = 1,48 ∙ 2,07 ∙ 10] ∙ 66 ∙ 10L5 ∙ 0,196 ∙ 10B ∙ 40 = 0,122I Que es un poco superior al valor obtenido en MATHCAD debido a que la hoja de cálculo
opera con el radio teórico obtenido: 0,5475mm y no con uno comercial 0,5mm. De hecho
si se utiliza el radio teórico, el área de un hilo se incrementa de 0,196 mm2 a 0,237mm2 y
operando en 5.21 con los demás datos, obtenemos el valor de 0,101W.
Conviene recordar que finalmente hemos construido la bobina del primario con 6 hilos de
0,5mm, en lugar de 5 hilos, para que no se vea reducida el área de cobre total. Se aborda
este tema en el subcapítulo 5.5.
Tampoco debemos perder de vista que éstas son las pérdidas en baja frecuencia. En alta
frecuencia se elevan a 0,106W tal y como se recoge en la figura 5.10.
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 32 de 90
Alumno: Luis David Villa Casal
En este subapartado hemos comprobado que los resultados obtenidos con la hija de cálculo
de MATHCAD son los mismos que podemos obtener operando manualmente e incluso
ampliados al ofrecernos resultados de pérdidas en alta frecuencia, que de otra manera nos
llevaría a cálculos engorrosos. Aunque la principal ventaja es la posibilidad de iterar
rápidamente y optimizar el diseño de las bobinas de forma rápida y eficiente.
5.4 CÁLCULO DE LA BOBINA DEL SECUNDARIO
A continuación realizamos los cálculos para la bobina del secundario. Como el proceso es
el mismo, no nos detendremos demasiado en la explicación, por lo que remitimos al lector
a los cálculos del primario para resolver cualquier duda que pueda surgir.
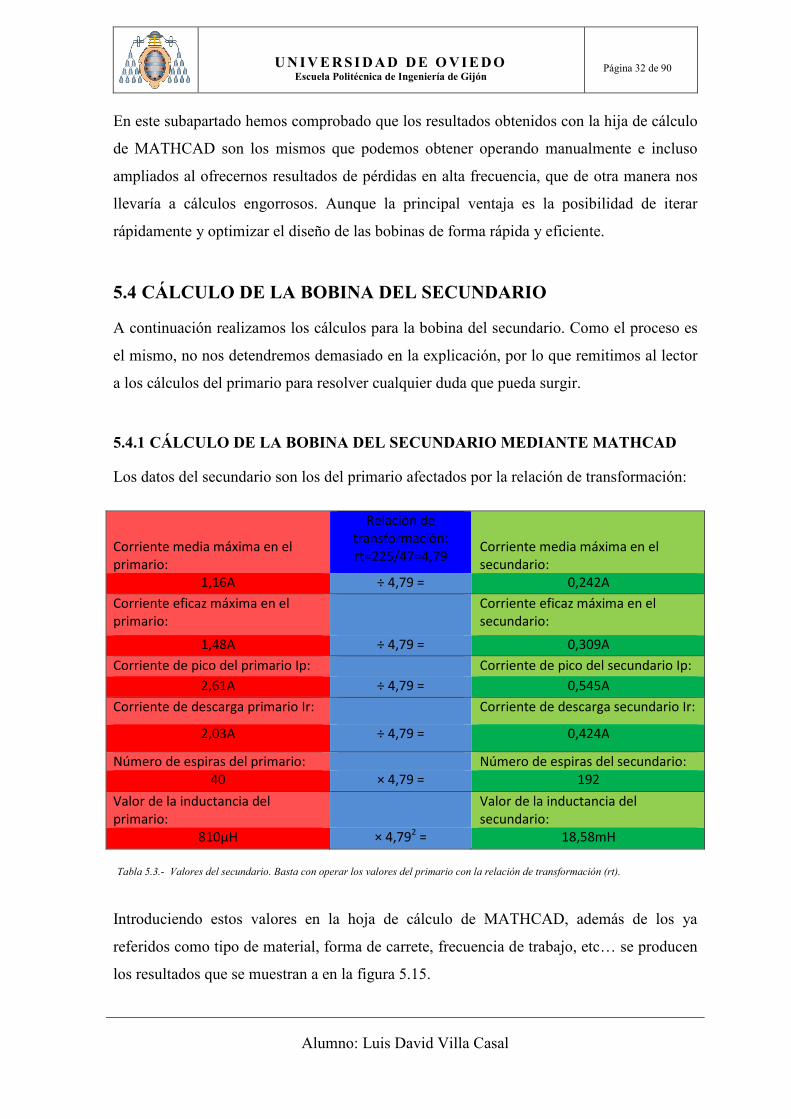
5.4.1 CÁLCULO DE LA BOBINA DEL SECUNDARIO MEDIANTE MATHCAD
Los datos del secundario son los del primario afectados por la relación de transformación:
Corriente media máxima en el primario:
Relación de transformación: rt=225/47=4,79
Corriente media máxima en el secundario:
1,16A ÷ 4,79 = 0,242A
Corriente eficaz máxima en el primario:
Corriente eficaz máxima en el secundario:
1,48A ÷ 4,79 = 0,309A
Corriente de pico del primario Ip: Corriente de pico del secundario Ip:
2,61A ÷ 4,79 = 0,545A
Corriente de descarga primario Ir: Corriente de descarga secundario Ir:
2,03A ÷ 4,79 = 0,424A
Número de espiras del primario: Número de espiras del secundario: 40 × 4,79 = 192
Valor de la inductancia del primario:
Valor de la inductancia del secundario:
810µH × 4,792 = 18,58mH
Tabla 5.3.- Valores del secundario. Basta con operar los valores del primario con la relación de transformación (rt).
Introduciendo estos valores en la hoja de cálculo de MATHCAD, además de los ya
referidos como tipo de material, forma de carrete, frecuencia de trabajo, etc… se producen
los resultados que se muestran a en la figura 5.15.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 33 de 90
Alumno: Luis David Villa Casal
Entre los resultados obtenidos destacan las pérdidas, donde Pcu=0,106W y Pcore=0,052W,
son resultados análogos a los del primario. Lo más importante es la recomendación de
utilizar un solo hilo de cobre de 0,588mm de diámetro.
Figura 5.15. - Valores para el secundario obtenidos mediante la hoja de cálculo de MATHCAD
Figura 5.16. - Como puede apreciarse en la figura, para 192 espiras las pérdidas totales son de 0,158W

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 34 de 90
Alumno: Luis David Villa Casal
En la figura 5.16, podemos apreciar que estamos muy cerca del mínimo de pérdidas
absoluto. El parámetro limitante a partir de ahora será el número de espiras, pues el área de
ventana disponible quedará muy justa para el número de espiras especificadas.
En conclusión para el secundario tenemos:
Espiras: 192
Diámetro hilo: 0,5 mm
Número de hilos: 1
5.4.2 CÁLCULO DE LA BOBINA DEL SECUNDARIO ANALÍTICAMENTE
Sabiendo que las pérdidas son:
Pcore=0,052W
Pcu(DC)=0,101W
Sustituimos el valor de pérdidas en 5.12:
EJ = EG:K = 0,052I17800--L = 0,052 ∙ 10LMI17800 ∙ 10N-L = 2,92MI-L
Con el valor de pérdidas por unidad de volumen de núcleo EJ = 2,92 ijk obtenemos la
densidad de flujo de pico:
T = 10XYZ(,N)\L,L]], → T = 33,81(5.15) La corriente de pico de alterna QR es para el secundario:
QR = 47 − 4:2 = 0,545 − 0,4242 = 0,06066(5.16) Nuevos valores que introducimos ahora en 5.17:

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 35 de 90
Alumno: Luis David Villa Casal
= A ∙ QR6 ∙ OP =18580CD ∙ 0,06066173-- ∙ 33,81- = 192,49~192#`'"%(5.17)
En MATHCAD obteníamos 192 espiras. Las diferencias están en los decimales utilizados.
Para el entrehierro recalculamos en 5.18:
c = ∙ C? ∙ QROP − $C: = 192 ∙ 4d ∙ 10e ∙ 0,060633,81 ∙ 10L − 0,1031850 = 0,377--(5.18)
Donde obtenemos un valor casi idéntico al de la hoja de cálculo (0,376mm).
Comprobamos la saturación del núcleo:
Ofg ≥ ∙ C? ∙ 'fg$C: + c= 192 ∙ 4d ∙ 10e ∙ 0,5450,1031850 + 3.77 ∙ 10l = 304-
La densidad de flujo por ordenador nos da como resultado 305mT.
Para el diámetro del hilo el resultado es el mismo que para el primario debido a que en la
fórmula 5.20 el valor sólo es dependiente de la frecuencia de trabajo, que son 50kHz. El
diámetro del cable máximo es 0,67--.
En la simulación se elige cable de 0,559mm de diámetro. Redondeando al valor comercial
de 0,5mm estamos seguros de no malgastar área de cobre y de simplificar la construcción
de la bobina al utilizar el mismo diámetro de cable para primario y para secundario.
Recordamos que el área disponible para cada devanado era:
Ituvuwxyz(#&)*%"',) = Ituvuwxyz 2| = 43,66--
El área disponible por espira de secundario (ocupando el máximo área es):
6"#%-áT'-%`,"#`'"%*#$#&)*%"', =Ituvuwxyz 2|
= 43,66192 = 0,227--
Hemos elegido hilo de 0,5mm de diámetro y que su sección es de 0,196-- podemos
comprobar que sólo podremos usar un hilo por espira:

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 36 de 90
Alumno: Luis David Villa Casal
º-áT. ℎ'$,`,"#`'"%*#$`"'-%"', = 6"#%-áT'-%`,"#`'"%*#$`"'-%"',#&&'ó)*#)ℎ'$,
º-áT. ℎ'$,`,"#`'"%*#$`"'-%"', = 0,2270,196 = 1,158 = 1ℎ'$,`,"#`'"%(max) (debemos truncar el resultado para no sobrepasar el área máxima)
Quizás podríamos usar hilo de 0,6mm de diámetro, pero nos arriesgamos a que no nos
quepa en el área de ventana. Para más detalles consultar el subapartado siguiente 5.6.
Las pérdidas en el cobre (W) en corriente continua, vienen dadas por la ecuación:
EH = ' ∙ ∙ $n7p:f6n7p:f ∙ (5.21) Consideraremos el diámetro medio D de la espira de nuevo en torno a los 21mm:
$n7p:f = d ∙ 21 = 66--
Y recordando de la tabla 5.3 que la corriente eficaz del secundario es ' = 0,3096,
sustituyendo en la ecuación 5.21:
EH = 0,309 ∙ 2,07 ∙ 10] ∙ 66 ∙ 10L1 ∙ 0,196 ∙ 10B ∙ 192 = 0,128I Valor de nuevo superior al de la hoja de cálculo que halla las pérdidas con el diámetro
óptimo obtenido.
5.5 OPTIMIZACIÓN DEL ÁREA DE VENTANA DEL CARRETE
Estos son los parámetros elegidos del transformador flyback:
Primario Secundario
Espiras: 40 Espiras: 192
Diámetro hilo: 0,5 mm Diámetro hilo: 0,5 mm
Número de hilos: 6 Número de hilos: 1
Tabla 5.4.- Resumen de los parámetros constructivos del transformador flyback. A ellos hay que añadir que el carrete es el ETD44.
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 37 de 90
Alumno: Luis David Villa Casal
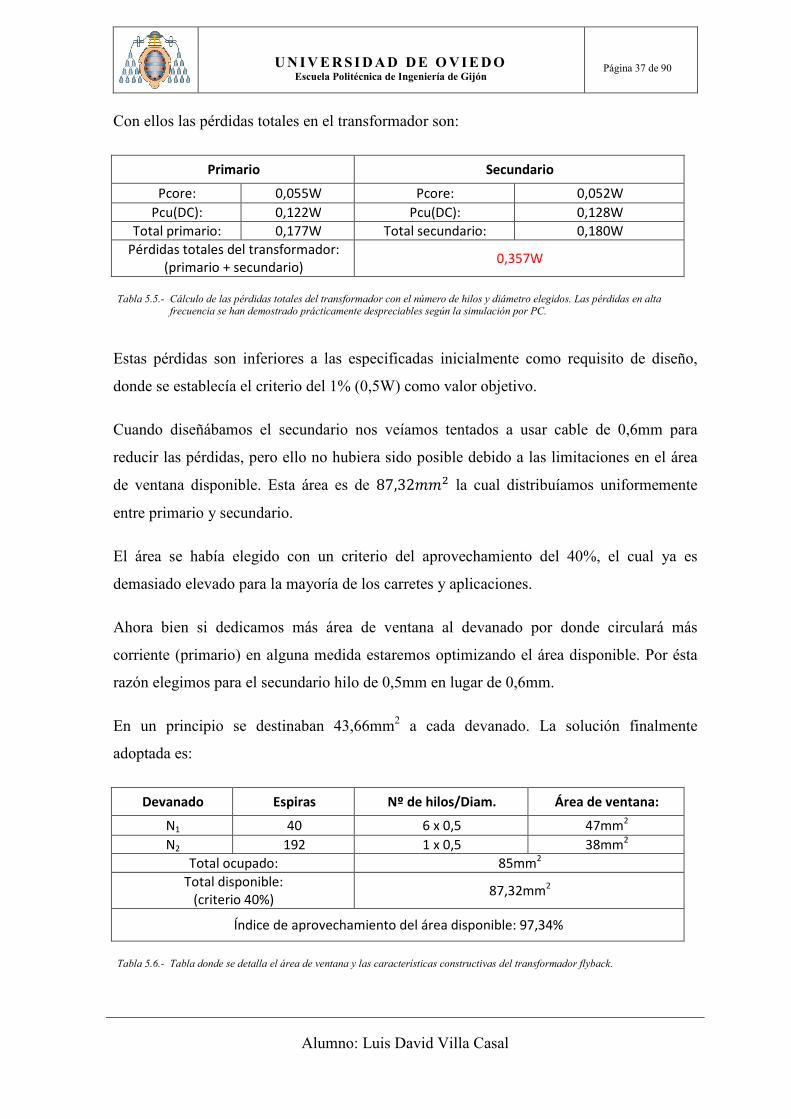
Con ellos las pérdidas totales en el transformador son:
Primario Secundario
Pcore: 0,055W Pcore: 0,052W
Pcu(DC): 0,122W Pcu(DC): 0,128W
Total primario: 0,177W Total secundario: 0,180W
Pérdidas totales del transformador: (primario + secundario)
0,357W
Tabla 5.5.- Cálculo de las pérdidas totales del transformador con el número de hilos y diámetro elegidos. Las pérdidas en alta frecuencia se han demostrado prácticamente despreciables según la simulación por PC.
Estas pérdidas son inferiores a las especificadas inicialmente como requisito de diseño,
donde se establecía el criterio del 1% (0,5W) como valor objetivo.
Cuando diseñábamos el secundario nos veíamos tentados a usar cable de 0,6mm para
reducir las pérdidas, pero ello no hubiera sido posible debido a las limitaciones en el área
de ventana disponible. Esta área es de 87,32-- la cual distribuíamos uniformemente
entre primario y secundario.
El área se había elegido con un criterio del aprovechamiento del 40%, el cual ya es
demasiado elevado para la mayoría de los carretes y aplicaciones.
Ahora bien si dedicamos más área de ventana al devanado por donde circulará más
corriente (primario) en alguna medida estaremos optimizando el área disponible. Por ésta
razón elegimos para el secundario hilo de 0,5mm en lugar de 0,6mm.
En un principio se destinaban 43,66mm2 a cada devanado. La solución finalmente
adoptada es:
Devanado Espiras Nº de hilos/Diam. Área de ventana:
N1 40 6 x 0,5 47mm2
N2 192 1 x 0,5 38mm2
Total ocupado: 85mm2
Total disponible: (criterio 40%)
87,32mm2
Índice de aprovechamiento del área disponible: 97,34%
Tabla 5.6.- Tabla donde se detalla el área de ventana y las características constructivas del transformador flyback.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 38 de 90
Alumno: Luis David Villa Casal
Si hubiéramos usado hilo de 0,6mm2 en el secundario, no hubiera cabido en el área de
ventana disponible.
5.6 TRANSFORMADOR FLYBACK CONSTRUIDO Y MEDICIÓN DE LOS RESULTADOS
Con los datos de los apartados anteriores y principalmente con los resumidos en la tabla
5.4, estamos en disposición de construir el transformador.
Para el arrollamiento del secundario se usa una máquina de bobinar. El esmalte del hilo
soporta hasta 300V. Como la tensión de salida está próxima a la tensión de perforación del
dieléctrico, añadimos una capa de cinta aislante entre capa y capa, de forma que
reduzcamos al máximo la posibilidad de que se estropee la bobina.
Una vez enrollado el secundario, procedemos con el primario. Al tratarse de 6 hilos
cruzados sobre sí mismos, se realiza de forma manual.
Finalmente se sueldan los extremos de los hilos a las patillas del carrete de forma
asimétrica, para minimizar los errores de posición en la placa de circuito impreso.
Figura 5.17. - A la izquierda
podemos observar una vista superior del transformador donde
se aprecian de color verde los
separadores que ajustan el entrehierro a la longitud
necesaria. A la derecha foto de la
parte inferior donde se puede apreciar la soldadura de los hilos
de las bobinas a las patillas que irán insertadas en la placa de
circuito impreso.
Figura 5.18. - A la izquierda vemos la imagen inferior del transformador donde
podemos ver el patillaje asimétrico (marcado en rojo) para evitar una colocación
incorrecta en la placa de circuito impreso. También se hace evidente el poco espacio que queda entre el bobinado y el material magnético (marcado por la
flecha)

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 39 de 90
Alumno: Luis David Villa Casal
Para ajustar el entrehierro para obtener la medida deseada de inductancia de entrehierro se
probó con papeles de diversos espesores. Como anécdota decir que fueron unos POST-IT
que tenía el profesor Calleja en su despacho los que ofrecieron una mejor aproximación.
Con este ajuste manual realizado con un medidor de impedancias de precisión se logró un
valor de 821µH a 50kHz. El valor deseado eran 810µH, por lo que estamos en una
precisión mejor del ±2%, (concretamente +1,35%) lo que es un excelente resultado para
este tipo de componentes, donde no es rara una tolerancia en torno al ±20%.
Se realizó un análisis en frecuencia del componente (primario) arrojando los siguientes
resultados:
kHz Ls(µH) Rs(Ω)
1 738,316 0,06722
1,2 738,347 0,06956
1,5 738,285 0,07057
2 738,271 0,07232
2,5 738,676 0,07486
3 738,694 0,07825
4 738,896 0,08513
5 739,093 0,09434
6 739,343 0,10463
8 740,115 0,12848
10 741,119 0,15624
12 742,397 0,18735
15 744,863 0,25371
20 750,267 0,39651
25 757,339 0,59080
30 766,120 0,83989
40 789,532 1,55069
50 821,253 2,63462
60 864,923 4,28024
80 998,940 10,6118
100 1247,26 27,4938
120 1791,86 88,0053
150 7799,08 3,65813
200 Falla modelo Falla modelo
Tabla 5.7.- El modelo utilizado en el medidor de impedancias HP4284A fue el Ls-Rs, es decir se aproximaba la bobina a una
inductancia en serie con una resistencia. Los resultados son sólo del primario y medidos con el secundario en circuito abierto.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 40 de 90
Alumno: Luis David Villa Casal
Figura 5.19. - Gráfica con los valores obtenidos en la tabla 5.7. El modelo es lineal hasta los 110kHz, a partir de ahí el componente deja de comportarse como una bobina y su caracterización como un modelo Ls-Rs no es aplicable.
Las mediciones se realizaron con la siguiente disposición:
Figura 5.20. - Disposición del equipo de medición y del transformador. Modelado de bobina: Ls-Rs
Los resultados arrojados por el equipo de medida (ver tabla 5.7) nos dan los valores de la
inductancia del primario junto con la impedancia de dispersión de acuerdo al modelo de la
figura 5.21; consideramos despreciable el valor de la inductancia de dispersión en relación
a la inductancia de la bobina del primario. Esta medida también nos da la resistencia (1)
debida al cobre del primario, en la que incluimos también la resistencia de pérdidas en el
núcleo (RFe) que estaría en paralelo con L en el modelo de la figura 5.21.
0
10
20
30
40
50
60
70
80
90
100
0
1000
2000
3000
4000
5000
6000
7000
8000
0 10 20 30 40 50 60 70 80 90 100 110 120 130 140 150
[Ω][µH]
Frecuencia [kHz]
Inductancia y Resistencia Serie Vs Frecuencia
inductancia
Resistencia serie
Medidor de impedancias
HP4284A
Transformador flyback bajo estudio
primario secundario
Resultados:
Ls=821µH Rs=2,635Ω
@50kHz

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 41 de 90
Alumno: Luis David Villa Casal
Figura 5.21. - Esquema equivalente del transformador flyback. En nuestro sistema consideraremos RFE incluida en Rs_1, por lo que no aparece en esquemas posteriores.
Por lo tanto realizando el ensayo de la figura 5.20 obtenemos:
A = An = 821CD@50D5
n1 = n = 2,635Ω@50D5
Donde Ls y Rs son los valores registrados por el medidor de impedancias y L y n1 los
valores de las impedancias correspondientes del modelo representado en la figura 5.21.
Las mediciones se realizan ahora con un cortocircuito en el secundario:
Figura 5.22. - Si cortocircuitamos el devanado secundario obtenemos la impedancia de dispersión y la resistencia del arrollamiento de cobre a la frecuencia de 50kHz incluidos primario y secundario, que es ligeramente mayor que la resistencia en DC debido al efecto
skin o pelicular.
La impedancia de dispersión medida y la resistencia serie, se dividen a partes igualesi:
At1 = An2 = 5,44CD@50D5
i Debido a la imposibilidad de medir independientemente, se considera la inductancia de dispersión y la resistencia serie dividida a partes iguales entre el devanado primario y el secundario, según el libro de Fraile Mora: “Máquinas Eléctricas” pag. 191, 2ª Edición.
Medidor de impedancias
HP4284A
Transformador flyback bajo estudio
primario secundario
Resultados:
Ls=10,875µH Rs=0,4395Ω
@50kHz

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 42 de 90
Alumno: Luis David Villa Casal
n1 = n2 = 0,22Ω@50D5
Los valores At0 y n0 pueden obtenerse experimentalmente cambiando el arreglo de la
figura 5.22 de forma que se coloque el cortocircuito en el primario y el analizador de
impedancias en el secundario.
Figura 5.23. - Disposición para medir inductancia de dispersión y resistencia del cobre (por efecto joule) del secundario.
Los resultados obtenidos son:
At0 = An2 = 95,25CD@50D5
n0 = n2 = 5,49Ω@50D5
Estos resultados deberían coincidir con los del primario afectados por la relación de
transformación:
At1 ∙ " = At0 (5.22) n1 ∙ " = n0 (5.23)
Comprobamos los valores:
At1 ∙ " = 5,44 ∙ 4,79 = 124,81CDAt0 = 95,25CD
n1 ∙ " = 0,22 ∙ 4,79 = 5,05Ωn0 = 5,49Ω
Donde podemos ver que están en el mismo orden de magnitud.
De lo anteriormente expuesto podemos dar valores al sistema equivalente de nuestro
transformador flyback que utilizaremos en la simulación en POWERSIM:
Medidor de impedancias
HP4284A
Transformador flyback bajo estudio
primario secundario
Resultados:
Ls=190,497µH Rs=10,983Ω
@50kHz
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 43 de 90
Alumno: Luis David Villa Casal
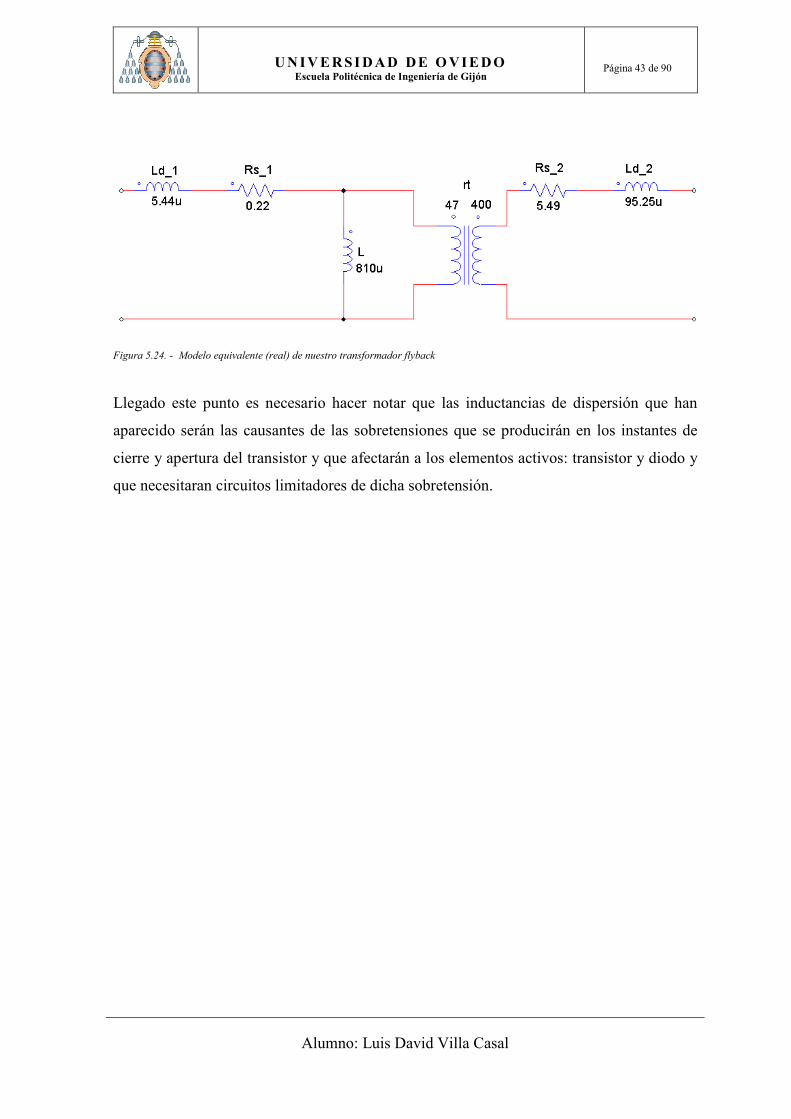
Figura 5.24. - Modelo equivalente (real) de nuestro transformador flyback
Llegado este punto es necesario hacer notar que las inductancias de dispersión que han
aparecido serán las causantes de las sobretensiones que se producirán en los instantes de
cierre y apertura del transistor y que afectarán a los elementos activos: transistor y diodo y
que necesitaran circuitos limitadores de dicha sobretensión.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 44 de 90
Alumno: Luis David Villa Casal
6. Cálculo de los condensadores Debemos disminuir el rizado de entrada del convertidor, pues un excesivo nivel de alterna
a la entrada podría dañar el panel.
A la salida también debemos colocar un condensador para estabilizar la tensión en la carga.
6.1 CONDENSADOR DE ENTRADA
Especificamos un valor máximo de rizado del 1%. Simplificamos el panel a su equivalente
Thevenin:
Figura 6.1. - Equivalente Thevenin del panel solar en el punto de funcionamiento de máxima potencia del panel
Y con este esquema tratamos de obtener un valor de C que cumpla el requisito de rizado
donde el 1% de 47v es 0,47V. El valor puede obtenerse con software de simulación o
analíticamente como hacemos para el condensador de salida. El resultado es que debe ser
superior a 24,7µF. Utilizaremos un condensador de 33µF por disponibilidad.
6.2 CONDENSADOR DE SALIDA
En el condensador de salida tenemos la señal en la carga en la figura 6.2 izquierda, que
podemos aproximarla por la de la figura 6.2 de la derecha.
Figura 6.2. - Tensión de la carga aproximada a su valor medio en el periodo durante el cual conduce
Tiempo
Idiodo
0,545A 0,424A 0,485A
(1-D)T DT

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 45 de 90
Alumno: Luis David Villa Casal
Esta señal es la suma de una componente continua más una alterna. Si nos quedamos con
la alterna exclusivamente, tenemos la figura inferior, donde debe cumplirse un rizado del
1% sobre una tensión de salida de 225V, que son 2,25V. En la salida, el condensador se
carga en el intervalo del PWM de duración:
f:fGqtqnftG: = (1 − ) ∙ (5.24)
Figura 6.3. - Carga y descarga del condensador de salida y momento del PWM en el que se produce.
La tensión del condensador viene dada por la expresión:
() = () + 1 = '01 ()*(5.25)
El incremento de tensión ∆ = () − () no es ni más ni menos que el rizado, por
tanto, resolviendo la integral y despejando C:
∆ = 1 (4Hft:ftf)( − ) → = 1∆ (4Hft:ftf)( − )(5.26) Para un punto de funcionamiento de D=0,5 y una frecuencia de PWM, f=50000Hz:
≥ 10,225 (0,242)(1 − 0,5) ∙ 150000 = 10,76μ
Por lo que valores comerciales a partir de 12µF funcionarán perfectamente.
0,242A
2,25V
(1-D)T
t1 t2
Tiempo
Vcondensador
I[A]
t0
Idiodo
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 46 de 90
Alumno: Luis David Villa Casal
7. Elección y circuitos de protección de los elementos activos
Para poder definir qué modelo exacto de transistor y diodo son necesarios utilizar, primero
es necesario conocer cuáles son las condiciones reales de trabajo a las que se van a
enfrentar.
En la figura 5.4 del subcapítulo “5.2 CÁLCULO DE LA INDUCTANCIA
MAGNETIZANTE (VISTA DESDE EL PRIMARIO)” se presentaba un comportamiento
ideal de los componentes activos y del transformador. Sin embargo el MOSFET presenta
una capacidad parásita al igual que el diodo del secundario. Estas capacidades en
conjunción con las impedancias de dispersión del transformador provocarán unos picos de
tensión que pueden causar la destrucción de los elementos activos si no están
correctamente dimensionados y que además, como veremos, hace imprescindible la
utilización de circuitos de protección que limiten estos efectos.
7.1 SITUACIÓN INICIAL SIN PROTECCIONES
En primer lugar, mediante simulación trataremos de vislumbrar el problema y los valores
que nos podemos encontrar; Después analizaremos sobre el circuito real los efectos de los
elementos reales.
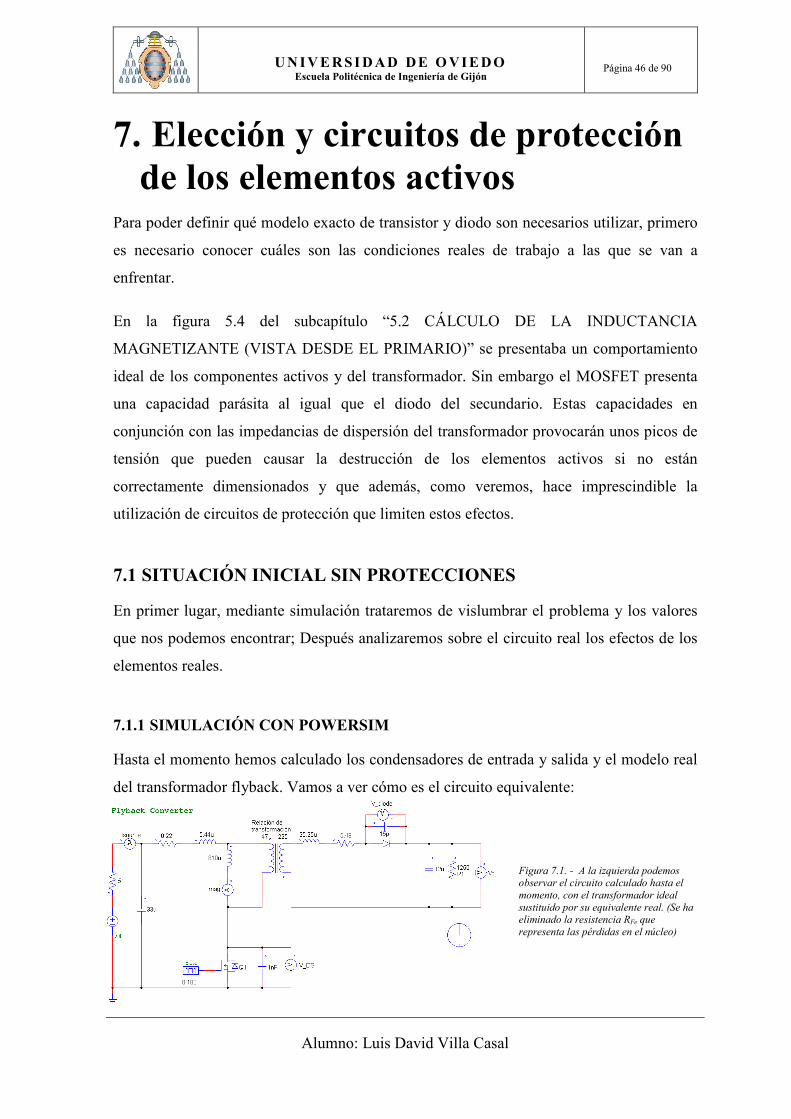
7.1.1 SIMULACIÓN CON POWERSIM
Hasta el momento hemos calculado los condensadores de entrada y salida y el modelo real
del transformador flyback. Vamos a ver cómo es el circuito equivalente:
Figura 7.1. - A la izquierda podemos observar el circuito calculado hasta el
momento, con el transformador ideal
sustituido por su equivalente real. (Se ha eliminado la resistencia RFe que
representa las pérdidas en el núcleo)

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 47 de 90
Alumno: Luis David Villa Casal
Los resultados obtenidos son:
Figura 7.2. - Sobretensiones causadas por la resonancia entre la capacidad de los elementos activos y la inductancia parásita del transformador.
Si comparamos estos resultados con los teóricos ideales de la figura 4.3, se puede observar
que la tensión en el transistor debería ser de unos 94V para un ciclo de trabajo D del 50% y
en realidad sobrepasamos los 200V. Para el diodo, sucede algo parecido en su orden de
magnitud. Debería haber unos 450V y tenemos prácticamente el doble.
Esta simulación nos sirve para comprobar que efectivamente existe un problema, pero la
mejor manera de obtener los valores y formas de onda exactas es medirlos sobre la propia
placa de prototipo.
7.1.2 MEDICIÓN DE LOS EFECTOS SOBRE LA PLACA DE PROTOTIPO
Para ver las sobretensiones en la placa no podemos obviamente trabajar a la tensión de
entrada nominal, pues corremos el riesgo más que probable de caer en un ensayo de
carácter destructivo del que podríamos recabar poca información. Por tanto trabajaremos a
una tensión de entrada reducida y veremos las formas de onda. A más tensión a la entrada,
mayores serán los picos pero en una proporción aproximadamente lineal, por lo que
podremos predecir el valor de los picos a la tensión nominal con bastante exactitud.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 48 de 90
Alumno: Luis David Villa Casal
También a una tensión reducida podremos comprobar la efectividad de los elementos de
protección y afinarlos a sus valores adecuados.
Con una tensión de entrada de 10V tenemos las formas de onda de la imagen siguiente:
Figura 7.3. - La primera traza en amarillo simula la señal de salida de control del microcontrolador. Esta señal se inyecta al driver
IR2125 y a continuación a la puerta del transistor. Es una señal de 5VDC con un ciclo de trabajo del 50% a 50KHz. La traza en verde con una escala de 50V/div es la tensión drenador-surtidor del MOSFET. En morado tenemos la tensión en el diodo del secundario y
finalmente la tensión de salida en azul.
Las formas de onda del circuito son las esperadas y con los valore adecuados. Para una
tensión de entrada de 10V tenemos a la salida una tensión media de 49,4V que se
corresponde aproximadamente con la relación de la ecuación (7.1):
= ∙ ∙ 1 − = 10 ∙ 4,8 ∙ 0,51 − 0,5 = 48K(7.1)
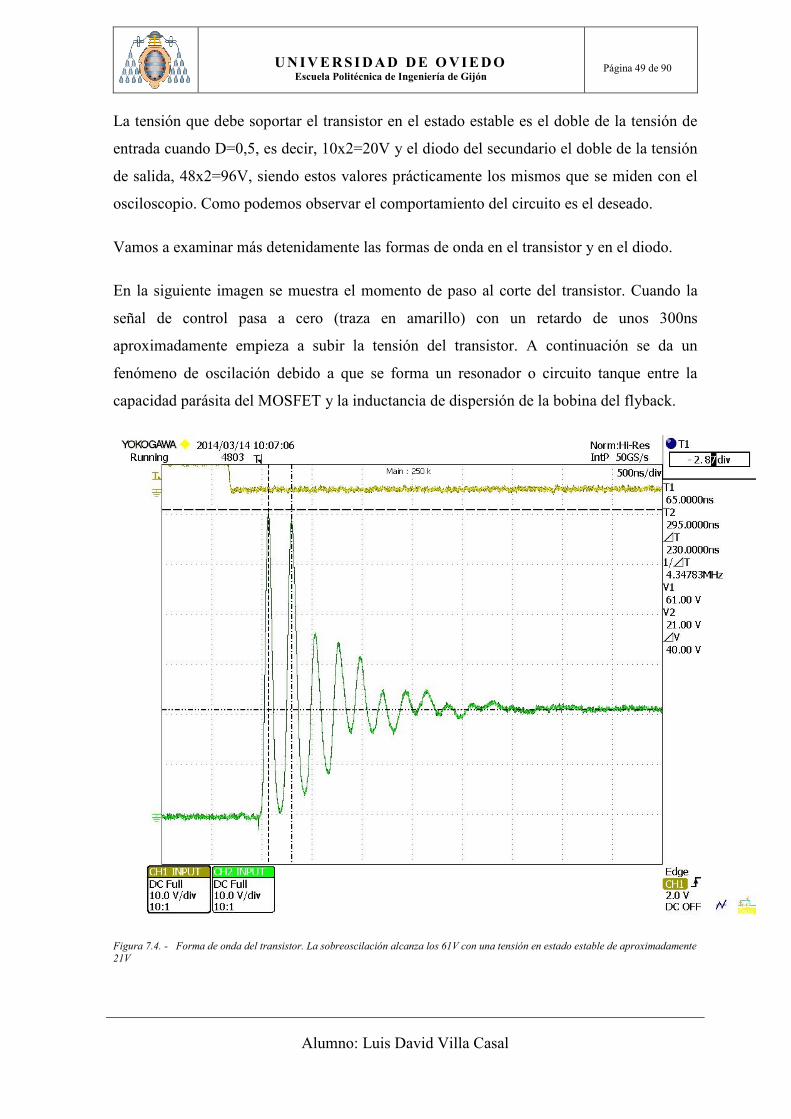
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 49 de 90
Alumno: Luis David Villa Casal
La tensión que debe soportar el transistor en el estado estable es el doble de la tensión de
entrada cuando D=0,5, es decir, 10x2=20V y el diodo del secundario el doble de la tensión
de salida, 48x2=96V, siendo estos valores prácticamente los mismos que se miden con el
osciloscopio. Como podemos observar el comportamiento del circuito es el deseado.
Vamos a examinar más detenidamente las formas de onda en el transistor y en el diodo.
En la siguiente imagen se muestra el momento de paso al corte del transistor. Cuando la
señal de control pasa a cero (traza en amarillo) con un retardo de unos 300ns
aproximadamente empieza a subir la tensión del transistor. A continuación se da un
fenómeno de oscilación debido a que se forma un resonador o circuito tanque entre la
capacidad parásita del MOSFET y la inductancia de dispersión de la bobina del flyback.
Figura 7.4. - Forma de onda del transistor. La sobreoscilación alcanza los 61V con una tensión en estado estable de aproximadamente
21V
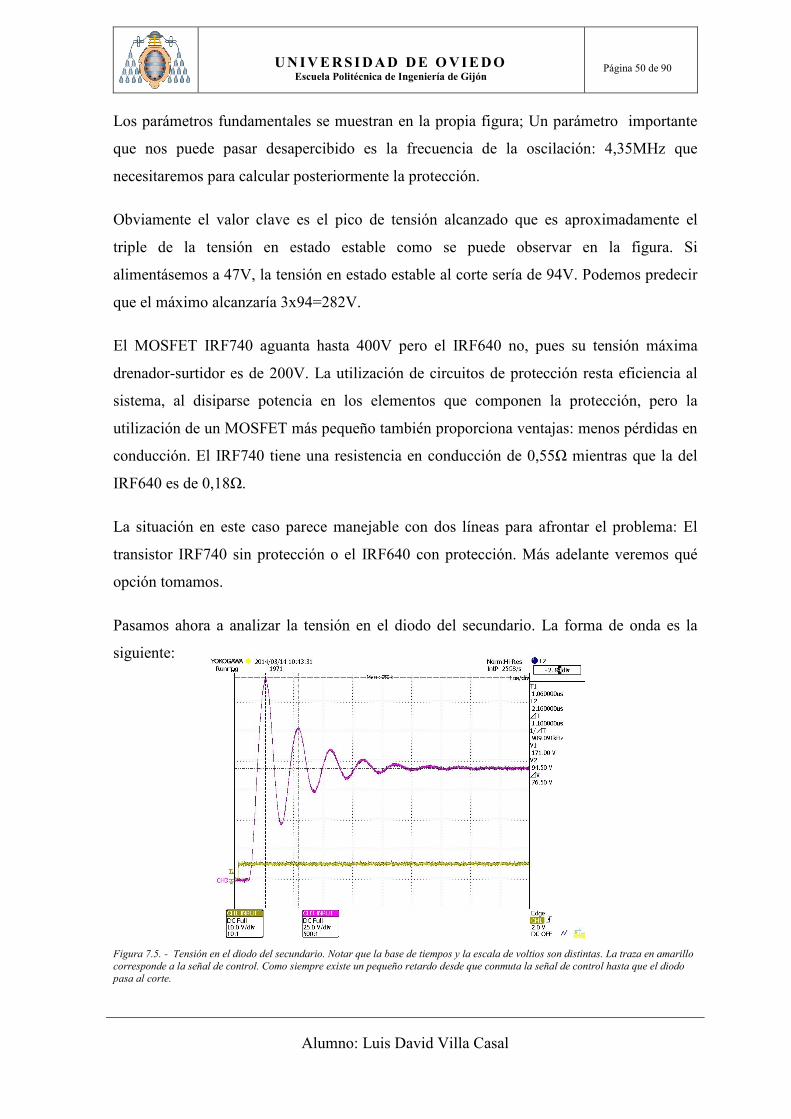
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 50 de 90
Alumno: Luis David Villa Casal
Los parámetros fundamentales se muestran en la propia figura; Un parámetro importante
que nos puede pasar desapercibido es la frecuencia de la oscilación: 4,35MHz que
necesitaremos para calcular posteriormente la protección.
Obviamente el valor clave es el pico de tensión alcanzado que es aproximadamente el
triple de la tensión en estado estable como se puede observar en la figura. Si
alimentásemos a 47V, la tensión en estado estable al corte sería de 94V. Podemos predecir
que el máximo alcanzaría 3x94=282V.
El MOSFET IRF740 aguanta hasta 400V pero el IRF640 no, pues su tensión máxima
drenador-surtidor es de 200V. La utilización de circuitos de protección resta eficiencia al
sistema, al disiparse potencia en los elementos que componen la protección, pero la
utilización de un MOSFET más pequeño también proporciona ventajas: menos pérdidas en
conducción. El IRF740 tiene una resistencia en conducción de 0,55Ω mientras que la del
IRF640 es de 0,18Ω.
La situación en este caso parece manejable con dos líneas para afrontar el problema: El
transistor IRF740 sin protección o el IRF640 con protección. Más adelante veremos qué
opción tomamos.
Pasamos ahora a analizar la tensión en el diodo del secundario. La forma de onda es la
siguiente:
Figura 7.5. - Tensión en el diodo del secundario. Notar que la base de tiempos y la escala de voltios son distintas. La traza en amarillo
corresponde a la señal de control. Como siempre existe un pequeño retardo desde que conmuta la señal de control hasta que el diodo
pasa al corte.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 51 de 90
Alumno: Luis David Villa Casal
En este caso vemos que la tensión de pico es 1,81 veces mayor (171/94,5=1,81). Si
aplicásemos la tensión nominal de 47V a la entrada, tendríamos a la salida 225V y una
tensión en el diodo de 450V en estado estable y la oscilación alcanzaría 450x1,81=815V.
En el estado actual de la técnica los diodos ULTRA FAST tienen una tensión máxima de
1000V. Por este motivo, para alcanzar una tensión de 450V para acoplarnos al bus
necesitamos disponer de dos flyback que nos suministren 225V cada uno.
Si utilizáramos un único flyback a 450V de salida, el diodo tendría que soportar 900V en
estado estable y se alcanzaría sin tener en cuenta otras consideraciones, un pico de
900x1,81=1629V imposible de tratar para los diodos ULTRA FAST disponibles
habitualmente en la actualidad. Para llegar a esas tensiones se podría disponer de varios
diodos discretos en serie, pero las condiciones de conmutación de un flyback no permiten
una ecualización dinámica idónea sin alterar la dinámica del sistema de forma notable, tal
y como se comprobó en la fase de pruebas. Tan solo la utilización de diodos en serie en un
mismo encapsulado puede solventar este problema. Pero “varios diodos en serie en un
mismo encapsulado” es incompatible con una alta velocidad del conjunto, por esta razón
no existen diodos ULTRA FAST de elevadas tensiones.
El progreso técnico posibilitará esta solución en el futuro pues se encontró que la empresa
norteamericana SENSITRON ya comercializa diodos ULTRA FAST que superan los
1000V, concretamente la referencia SRS1150HE:

UNIVERSIDAD DE OVIED
Figura 7.6. - Principales características del diodo SRS1150HE de Sensitron
De la elevada caída de tensión en conducción del diodo podemos inferir que
varios diodos en serie en un mismo encapsulado
inversa, mayores tiempos de recuperación
Por ejemplo, dentro de la misma gama nos encontramos:
Tipo
SRS1120HE
SRS1150HE
Tabla 7.1.- Tabla comparativa diodos ULTRAFAST de la empresa Sensitron
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Alumno: Luis David Villa Casal
Principales características del diodo SRS1150HE de Sensitron
De la elevada caída de tensión en conducción del diodo podemos inferir que
varios diodos en serie en un mismo encapsulado y que lógicamente a mayor tensión en
mayores tiempos de recuperación hasta caer fuera del rango de los ULTRA FAST
Por ejemplo, dentro de la misma gama nos encontramos:
Tensión inversa Tiempo de
recuperación
SRS1120HE 1200V
SRS1150HE 1500V
Tabla comparativa diodos ULTRAFAST de la empresa Sensitron
Página 52 de 90
De la elevada caída de tensión en conducción del diodo podemos inferir que se trata de
y que lógicamente a mayor tensión en
hasta caer fuera del rango de los ULTRA FAST.
Tiempo de
recuperación
60ns
80ns
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 53 de 90
Alumno: Luis David Villa Casal
En nuestro caso disponemos del diodo MUR4100, que es el que se utilizará por
disponibilidad, aunque sería más razonable utilizar un diodo de menos corriente. Este
dispositivo soporta hasta 1000V y tenemos una sobretensión de 815V, por lo que en un
principio estamos dentro de los márgenes del dispositivo.
La frecuencia de oscilación que utilizaremos para los cálculos del snubber es de 909KHz,
obtenida de la visualización de la forma de onda en el osciloscopio. (Ver figura 7.4)
7.2 PROTECCIÓN PARA EL TRANSISTOR
Para evitar que el transistor puede llegar a tensiones destructivas, ya que el dispositivo está
diseñado para durar durante años sin acción de mantenimiento ni reparaciones, creemos
que lo más conveniente es la inclusión de protecciones para sobretensiones, teniendo en
cuenta que estos límites pueden ser sobrepasados en el caso de sobretensiones causadas por
descargas atmosféricas o maniobras de conmutación de la línea eléctrica.
Una instalación fotovoltaica debe tener capacidad de funcionar durante un largo periodo de
tiempo sin fallas de ningún tipo, pues generalmente se encontraran en lugares de difícil
acceso y el suministro eléctrico es crítico. Por tanto, aunque siempre nos hemos referido a
la eficiencia del sistema como un factor clave, aún lo es más la fiabilidad y la capacidad
para funcionar durante muchos años sin averías. Esto último sólo se consigue con un
régimen de funcionamiento lo más desahogado posible de los elementos activos y también
con unas condiciones en las que los elementos pasivos disipen la menor energía posible.
7.2.1 CÁLCULO PROTECCIÓN RCD PARA TRANSISTOR
Probamos varias configuraciones para la protección. Usamos la nota de aplicación AN-
4147i de Fairchild Semiconductor, que es toda una referencia en el sector de los flyback.
Nos da como resultado:
R=4776Ω C=42nF Potencia disipada=1,85W
iDisponible en: http://www.fairchildsemi.com/an/AN/AN-4147.pdf donde se puede consultar el proceso de cálculo.
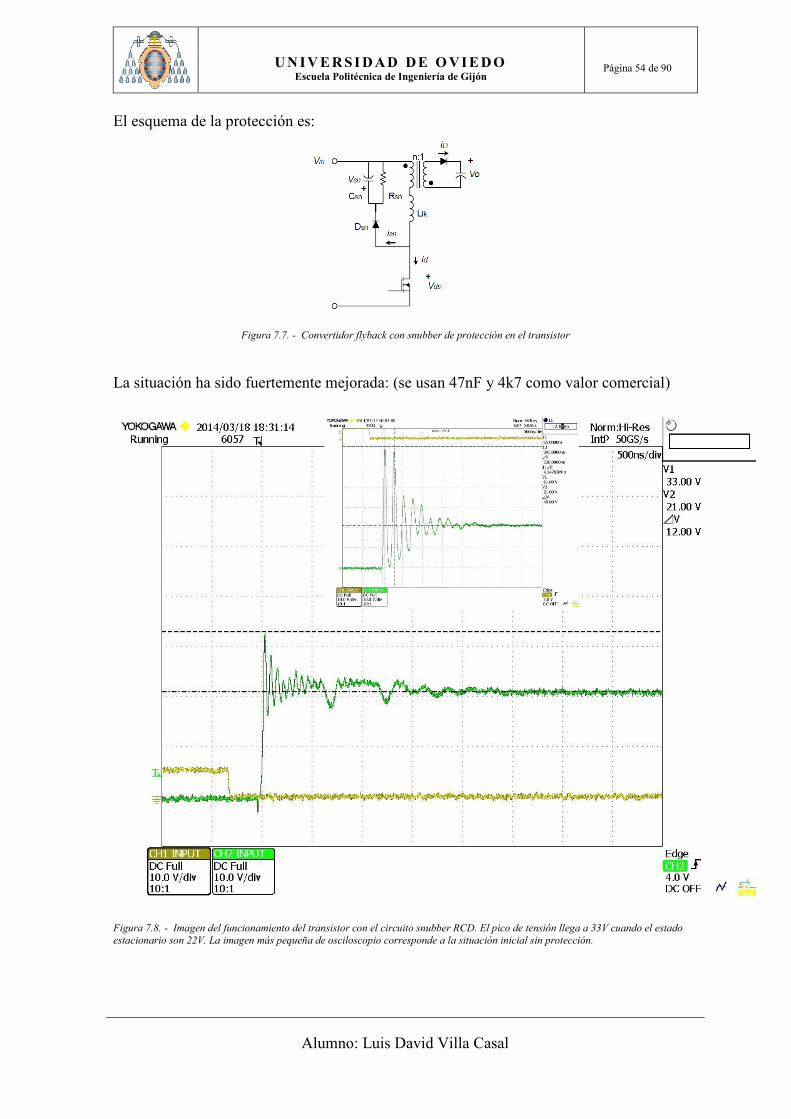
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 54 de 90
Alumno: Luis David Villa Casal
El esquema de la protección es:
Figura 7.7. - Convertidor flyback con snubber de protección en el transistor
La situación ha sido fuertemente mejorada: (se usan 47nF y 4k7 como valor comercial)
Figura 7.8. - Imagen del funcionamiento del transistor con el circuito snubber RCD. El pico de tensión llega a 33V cuando el estado
estacionario son 22V. La imagen más pequeña de osciloscopio corresponde a la situación inicial sin protección.

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 55 de 90
Alumno: Luis David Villa Casal
La proporción de sobretensión es: 33/21=1,6, por tanto a 94V tendríamos un pico de
94x1,6=150V
7.3 PROTECCIÓN RC PARA EL DIODO
En el diodo la protección que se usa es una de tipo RC. Para el caso del libro de Martínez
García y Gualda Gili la situación no parece haber mejorado mucho con 100pF y 4500Ω:
Figura 7.9. - Sobretensión según el método descrito en el libro de Gualda Gil.
En el libro referido la energía de la inductancia magnetizante es transferida al condensador:
12 ∙ A ∙ 4F = 12 ∙ ∙ b(7.2) i “Electrónica de Potencia” Salvador Martínez García y Juan Andrés Gualda Gil, Ed. Thomson 1ª Edición 2006, pags. 82-83.
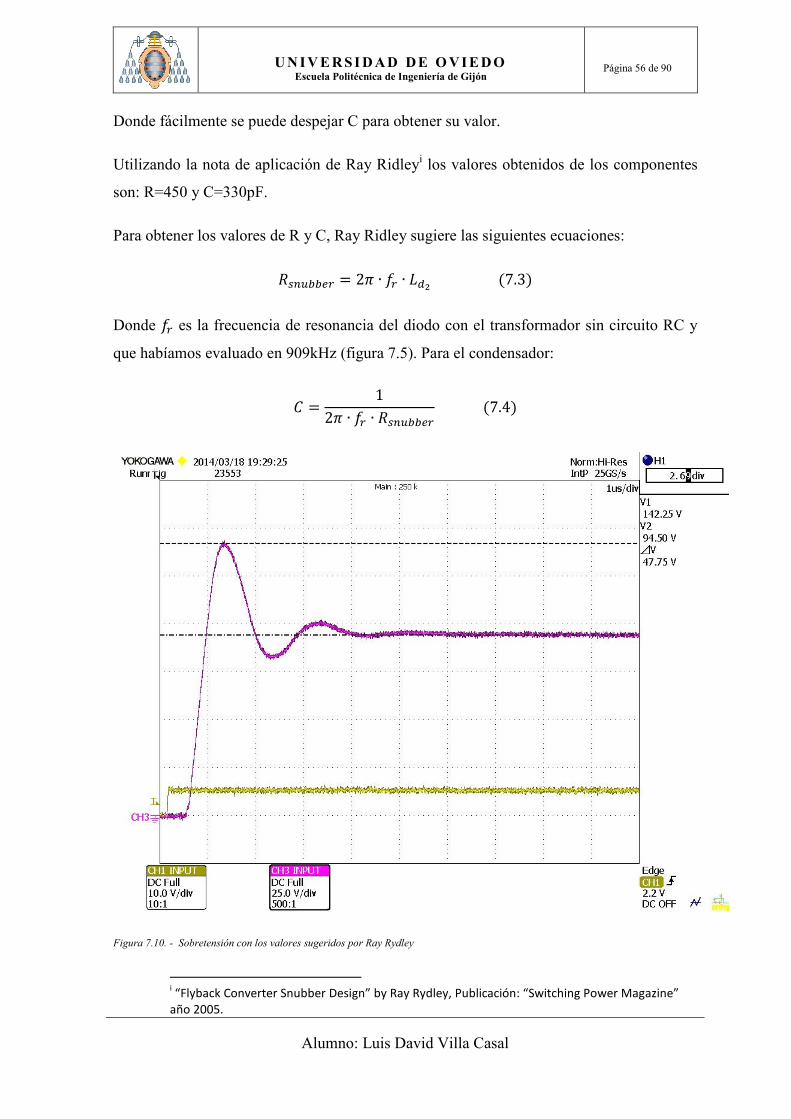
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 56 de 90
Alumno: Luis David Villa Casal
Donde fácilmente se puede despejar C para obtener su valor.
Utilizando la nota de aplicación de Ray Ridleyi los valores obtenidos de los componentes
son: R=450 y C=330pF.
Para obtener los valores de R y C, Ray Ridley sugiere las siguientes ecuaciones:
nqH: = 2d ∙ +: ∙ At0 (7.3) Donde +: es la frecuencia de resonancia del diodo con el transformador sin circuito RC y
que habíamos evaluado en 909kHz (figura 7.5). Para el condensador:
= 12d ∙ +: ∙ nqH: (7.4)
Figura 7.10. - Sobretensión con los valores sugeridos por Ray Rydley
i “Flyback Converter Snubber Design” by Ray Rydley, Publicación: “Switching Power Magazine” año 2005.
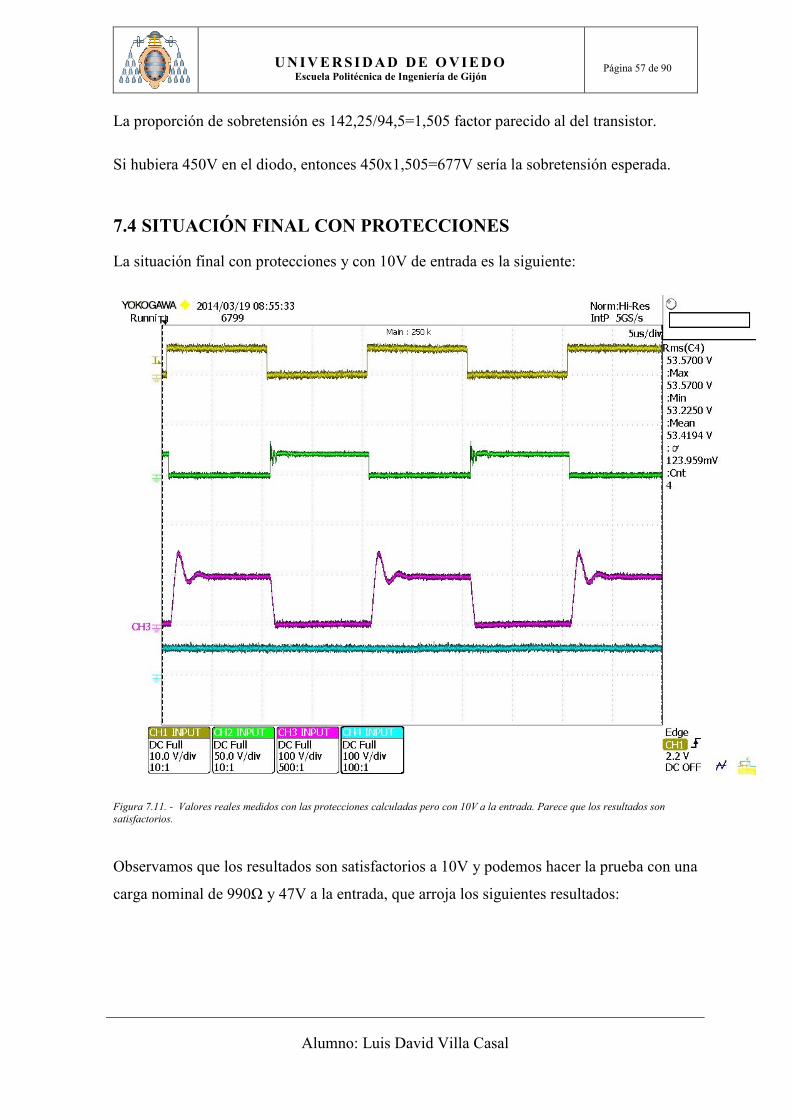
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 57 de 90
Alumno: Luis David Villa Casal
La proporción de sobretensión es 142,25/94,5=1,505 factor parecido al del transistor.
Si hubiera 450V en el diodo, entonces 450x1,505=677V sería la sobretensión esperada.
7.4 SITUACIÓN FINAL CON PROTECCIONES
La situación final con protecciones y con 10V de entrada es la siguiente:
Figura 7.11. - Valores reales medidos con las protecciones calculadas pero con 10V a la entrada. Parece que los resultados son
satisfactorios.
Observamos que los resultados son satisfactorios a 10V y podemos hacer la prueba con una
carga nominal de 990Ω y 47V a la entrada, que arroja los siguientes resultados:
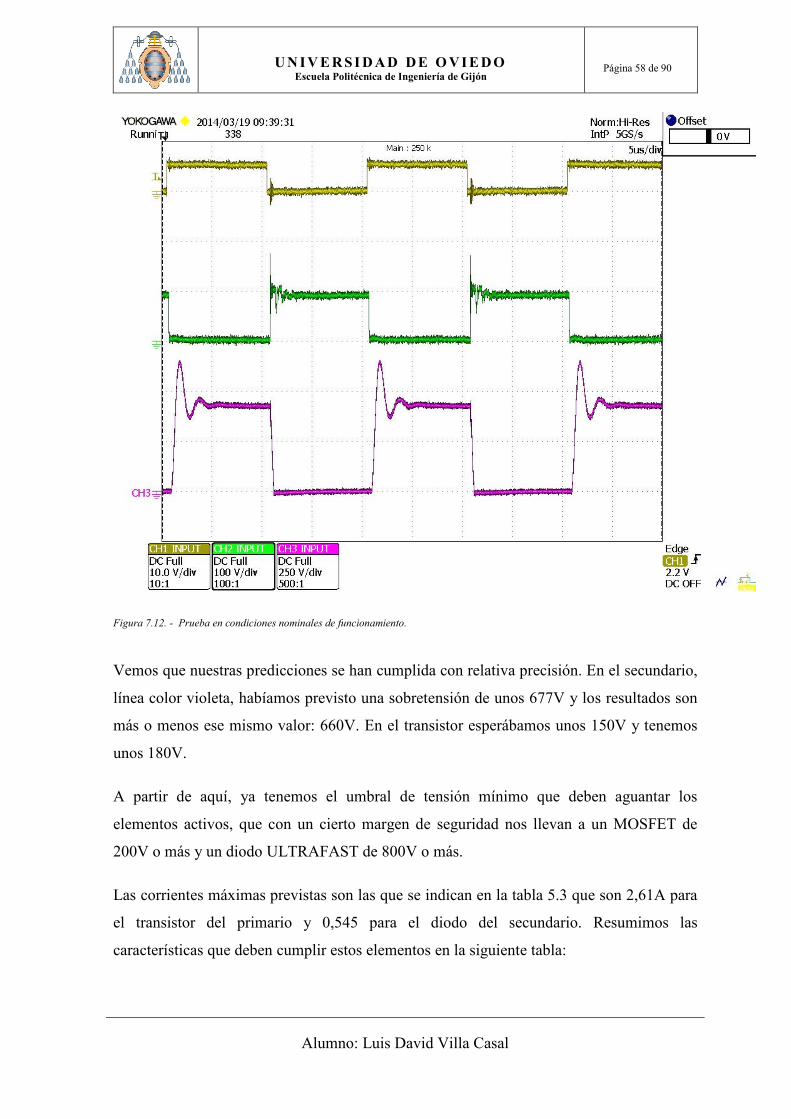
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 58 de 90
Alumno: Luis David Villa Casal
Figura 7.12. - Prueba en condiciones nominales de funcionamiento.
Vemos que nuestras predicciones se han cumplida con relativa precisión. En el secundario,
línea color violeta, habíamos previsto una sobretensión de unos 677V y los resultados son
más o menos ese mismo valor: 660V. En el transistor esperábamos unos 150V y tenemos
unos 180V.
A partir de aquí, ya tenemos el umbral de tensión mínimo que deben aguantar los
elementos activos, que con un cierto margen de seguridad nos llevan a un MOSFET de
200V o más y un diodo ULTRAFAST de 800V o más.
Las corrientes máximas previstas son las que se indican en la tabla 5.3 que son 2,61A para
el transistor del primario y 0,545 para el diodo del secundario. Resumimos las
características que deben cumplir estos elementos en la siguiente tabla:

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 59 de 90
Alumno: Luis David Villa Casal
Tensión mínima: Corriente mínima: Dispositivos sugeridos:
Transistor: 200V 4A IRF640 (IRF740)
Diodo: 800V 1A UF4007 ó BYV26E
Tabla 7.2.- Tabla con algunos de los dispositivos que podrían implementarse. Todos son muy habituales en el mercado.
La tensión de salida es:
Figura 7.13. - Tensión en la carga con un ciclo de trabajo D=50%.
La tensión media es de 217V, muy cerca de los 225V teóricos. Con cargas de mayor valor
óhmico, el valor se aproxima más al teórico. Podemos apreciar un ligero rizado de carga y
descarga. Si magnificamos el rizado vemos:
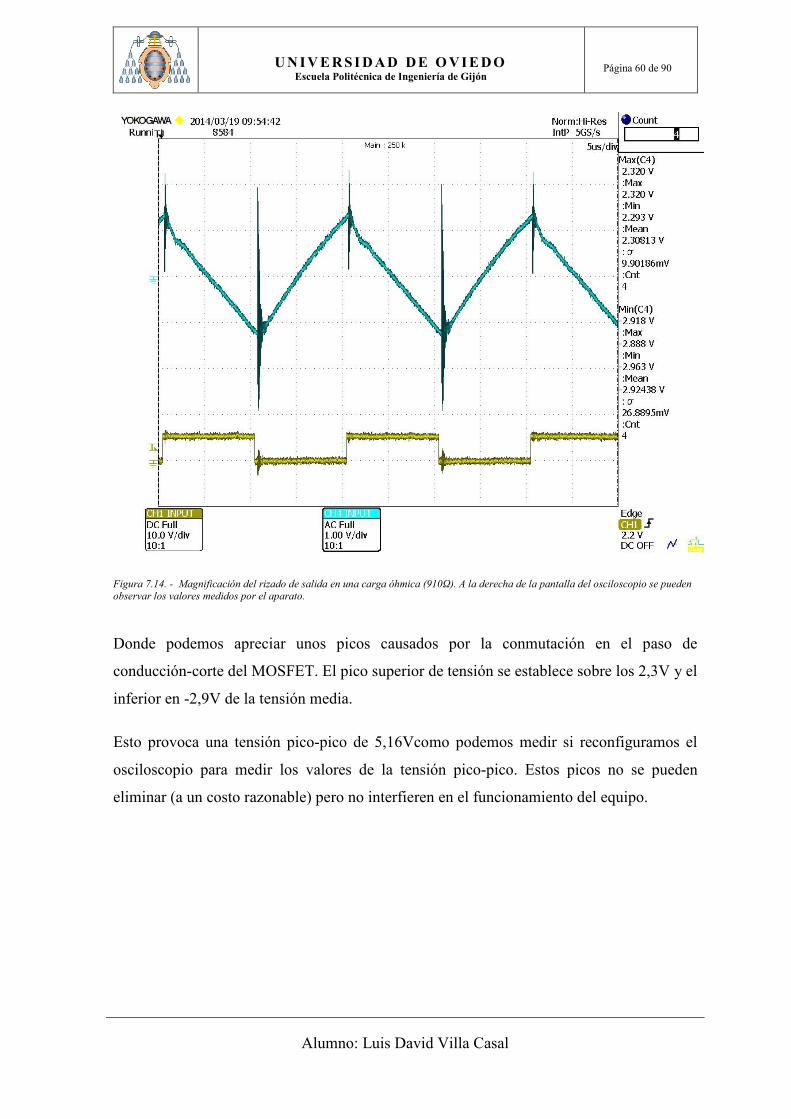
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 60 de 90
Alumno: Luis David Villa Casal
Figura 7.14. - Magnificación del rizado de salida en una carga óhmica (910Ω). A la derecha de la pantalla del osciloscopio se pueden observar los valores medidos por el aparato.
Donde podemos apreciar unos picos causados por la conmutación en el paso de
conducción-corte del MOSFET. El pico superior de tensión se establece sobre los 2,3V y el
inferior en -2,9V de la tensión media.
Esto provoca una tensión pico-pico de 5,16Vcomo podemos medir si reconfiguramos el
osciloscopio para medir los valores de la tensión pico-pico. Estos picos no se pueden
eliminar (a un costo razonable) pero no interfieren en el funcionamiento del equipo.
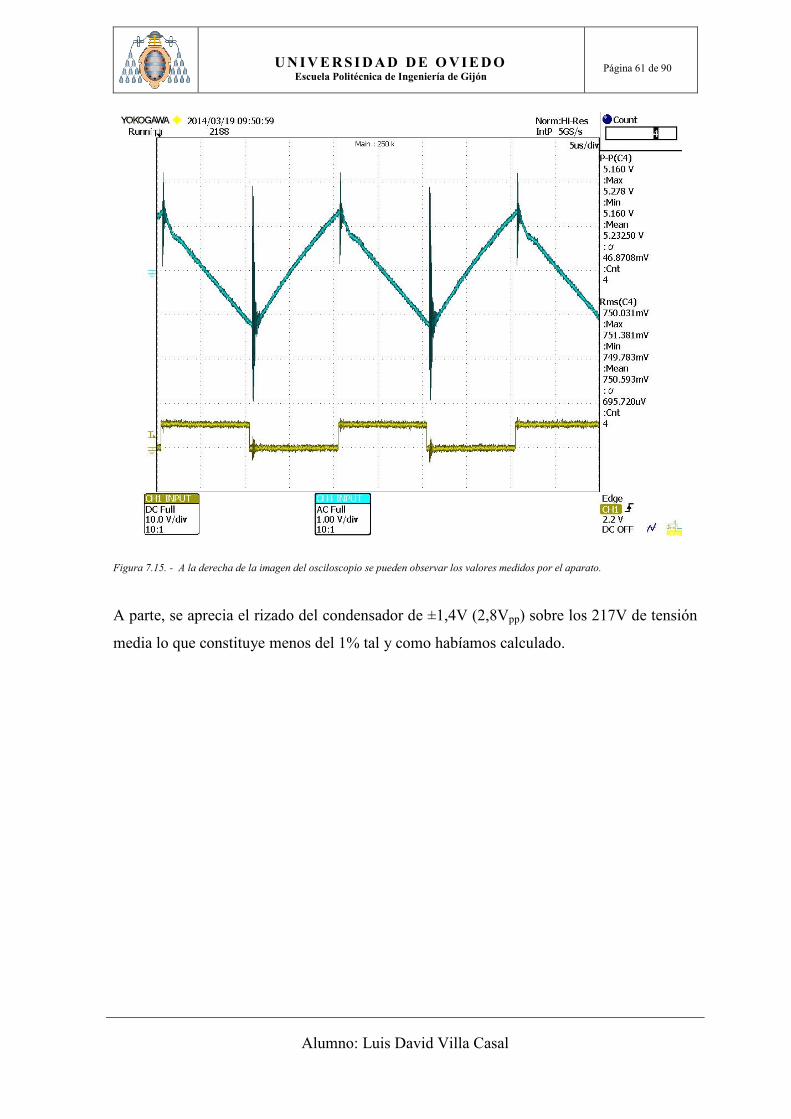
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 61 de 90
Alumno: Luis David Villa Casal
Figura 7.15. - A la derecha de la imagen del osciloscopio se pueden observar los valores medidos por el aparato.
A parte, se aprecia el rizado del condensador de ±1,4V (2,8Vpp) sobre los 217V de tensión
media lo que constituye menos del 1% tal y como habíamos calculado.
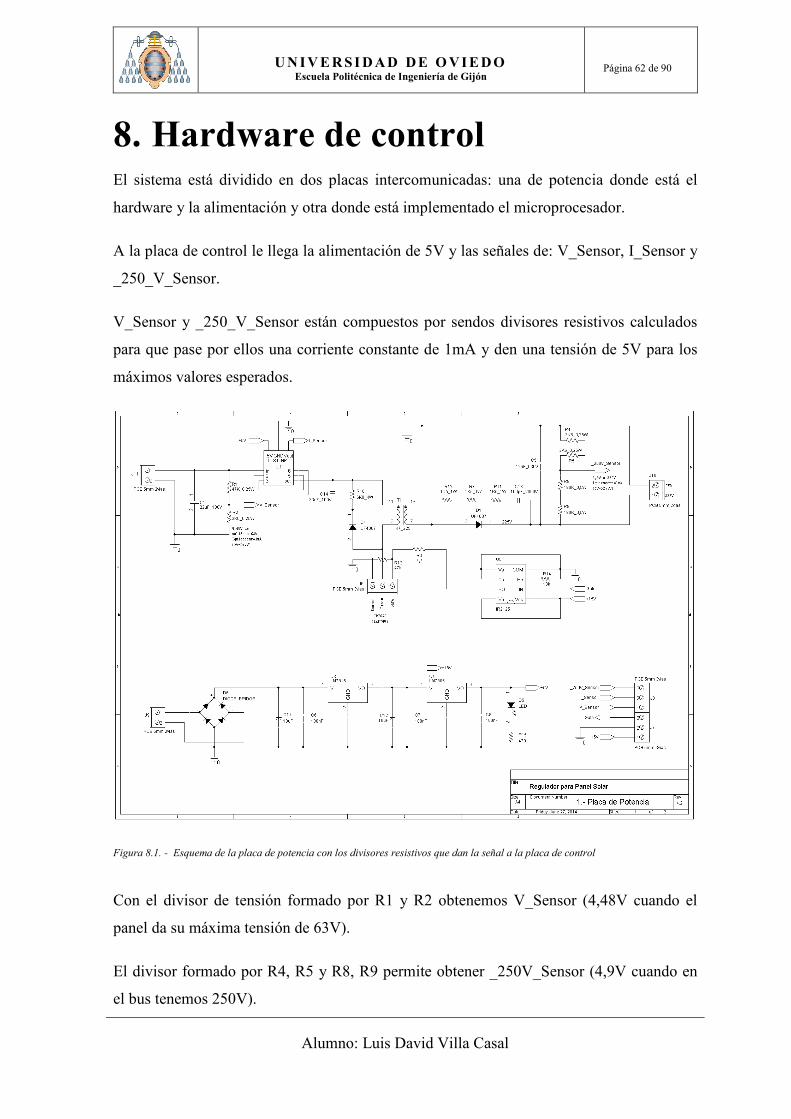
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 62 de 90
Alumno: Luis David Villa Casal
8. Hardware de control El sistema está dividido en dos placas intercomunicadas: una de potencia donde está el
hardware y la alimentación y otra donde está implementado el microprocesador.
A la placa de control le llega la alimentación de 5V y las señales de: V_Sensor, I_Sensor y
_250_V_Sensor.
V_Sensor y _250_V_Sensor están compuestos por sendos divisores resistivos calculados
para que pase por ellos una corriente constante de 1mA y den una tensión de 5V para los
máximos valores esperados.
Figura 8.1. - Esquema de la placa de potencia con los divisores resistivos que dan la señal a la placa de control
Con el divisor de tensión formado por R1 y R2 obtenemos V_Sensor (4,48V cuando el
panel da su máxima tensión de 63V).
El divisor formado por R4, R5 y R8, R9 permite obtener _250V_Sensor (4,9V cuando en
el bus tenemos 250V).

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 63 de 90
Alumno: Luis David Villa Casal
I_Sensor está implementado por un sensor de corriente comercial de la firma LEM, modelo
LTS 6-NP que nos dará una tensión de salida entre 2,5 y 5 Voltios, para una corriente entre
0 y 2A.
Todas estas señales llegan a la placa de control y de ella sale la señal de PWM de 0-5V.
Figura 8.2. - Esquemático de la placa de control
EL microprocesador elegido es de la firma Microchip, concretamete el dsPIC30F3013.
Funciona con un cristal de cuarzo a una velocidad de 88,5MHz, lo que nos permite una
velocidad de procesamiento de albo más de 22MIPSi
En I_Sensor incorporamos la resistencia R12 de 6k8 para filtrar junto con el condensador
C15 de 22nF y obtener una frecuencia de corte de 2500Hz.
Tanto V_Sensor como _250V_Sensor no incorporan dicha resistencia pues ya está
implícita en el divisor resistivo.
i MIPS=MegaInstrucciones Por Segundo

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 64 de 90
Alumno: Luis David Villa Casal
La placa se complementa con los LED’s D9, D10 y D11 que colocados en puntos
estratégicos del programa nos permiten visualizar con el osciloscopio los tiempos de
ejecución de las partes del programa que nos interesen.
La placa se programa mediante el conector RJ-45 que está conectado al programador USB
ICD 3.
El consumo de la placa de control está en torno a los 120mA (600mW)

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 65 de 90
Alumno: Luis David Villa Casal
9. Control En este capítulo se analizará el tipo de control elegido y el por qué de su elección, así como
sus parámetros.
9.1 CONTROL ANIDADO (NESTED LOOP CONTROL)
Es muy utilizado en control de fluidos y en sistemas de potencia. Consiste en descomponer
un sistema de orden “n”, en “n” lazos anidados de primer orden cada uno.
En nuestro caso el sistema es de orden dos, al existir dos elementos que almacenan energía:
condensador de entrada e inductancia magnetizante.
La realimentación de cada lazo linealiza lo que tiene dentro, por lo que es muy inmune a
las no linealidades de los componentes. Para ello se necesita que el lazo interno sea mucho
más rápido que el externo (idealmente 10 veces más rápido, aunque a partir de 4 ya podría
ser operativo). Entonces podemos aproximar el lazo interno por un bloque de ganancia
unidad.
9.2 VALORES DEL PI
9.2.1 LAZO INTERNO
Para el lazo interno tenemos el siguiente diagrama de control:
Figura 9.1. - Diagrama de bloques del lazo interno. L es la inductancia de la bobina 810µH y RL es la resistencia (pérdidas por efecto Joule) que ofrece el devanado del primario a 50kHz, que son mayores a las pérdidas en DC debido al efecto skin.
? 1F + ∙ A
QRF∗ + QRF#c$%*," '#-%(')*&%)&'%)
6byx Rpq F−

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 66 de 90
Alumno: Luis David Villa Casal
Para el regulador elegimos un PI, que es sencillo, ofrece una buena regulación y es fácil de
implementar:
#cpq() = M7yx 1 + 1 ∙ pyx = M7yx 1 + ∙ pyx ∙ pyx (8.1)
La función de transferencia del sistema mostrado, con el regulador elegido, se obtiene del
siguiente modo:
pq() = QRFQRF∗ =#cpq() ∙ pq()1 + #cpq() ∙ pq()(8.2)
Sustituyendo el sistema G’int(s) y el regulador Regint(s) en la anterior ecuación por sus
expresiones correspondientes:
pq() = M7yx 1 + ∙ pyx ∙ pyx ∙ 1F + ∙ A1 + M7yx 1 + ∙ pyx ∙ pyx ∙ 1F + ∙ A
Dividimos arriba y abajo la fracción del sistema G’int(s) por RLi:
pq() =M7yx 1 + ∙ pyx ∙ pyx ∙
1F1 + ∙ AF1 + M7yx 1 + ∙ pyx ∙ pyx ∙
1F1 + ∙ AF(8.3)
Utilizamos el método de cancelación de polos haciendo:
pyx = AF (8.4) Y sustituyendo en (8.3) obtenemos:
i RL es la resistencia (pérdidas por efecto Joule) que ofrece el devanado del primario a 50kHz, que son mayores a las pérdidas en DC debido al efecto skin. El valor de RL=0,4395Ω

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 67 de 90
Alumno: Luis David Villa Casal
pq() =M7yx 1 + ∙
AF ∙ AF∙
1F1 + ∙ AF1 + M7yx ∙ 1 + ∙
AF ∙ AF1F1 + ∙ AF
(8.5)
Ya sólo nos resta simplificar la expresión:
pq() =M7yx
1F ∙ AF1 + M7yx ∙
1F ∙ AF
Deshaciendo el cambio:
pyx = AF
pq() = M7yx1F ∙ pyx
1 + M7yx ∙1F ∙ pyx
Y llegamos finalmente a la función de transferencia del lazo interno:
pq() = 11 + ∙ pyx ∙ FM7yx
(8.6)
Donde: pyx = AF
Es la constante de tiempo integral

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 68 de 90
Alumno: Luis David Villa Casal
Para determinar la M7yx que es la ganancia integral, procedemos de la siguiente manera:
A partir de la función de transferencia del lazo, deshacemos el cambio:
pyx = AF
Y tenemos:
pq() = 11 + ∙
AF ∙ FM7yx
pq() = 11 + ∙ AM7yx
(8.7)
Que es un sistema de primer orden. Para los sistemas de primer orden la frecuencia de
corte + (que nos da el ancho de banda BW) se puede hallar con la expresión:
= 12d ∙ + (8.9) Donde es la constante de tiempo del sistema. En el caso de un filtro RC, la constante de
tiempo del sistema es:
= (8.10) Para determinar el ancho de banda del sistema, igualamos la expresión (8.7) con otra que
contenga (8.9) para un sistema de primer orden:
11 + ∙ 12d ∙ +
= 11 + ∙ AM7yx
De la cual obtenemos la relación:
12d ∙ + = AM7yx (8.11)

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 69 de 90
Alumno: Luis David Villa Casal
Operando llegamos a la relación que nos interesa:
M7yx = 2d ∙ + ∙ A(8.12) Ya tenemos todos los datos necesarios para calcular nuestro regulador PI interno:
#cpq() = M7yx 1 + 1 ∙ pyx = M7yx 1 + ∙ pyx ∙ pyx (8.13)
Donde:
M7yx = 2d ∙ + ∙ A
pyx = AF
Figura 9.2. - Diagrama de bloques del lazo interno con el regulador elegido
9.2.2 LAZO EXTERNO
Para el lazo externo realizamos un método análogo al anterior con la salvedad del cambio
del sistema a controlar, el cual es ahora la capacitancia. Damos por supuesto que el sistema
será suficientemente rápido como para poder aproximar el lazo interno anterior, por un
bloque de ganancia unidad:
M7yx 1 + ∙ pyx ∙ pyx 1F + ∙ A QRF∗ + QRF
#c$%*,"E4 '#-%(')*&%)&'%)6byx RpqF−
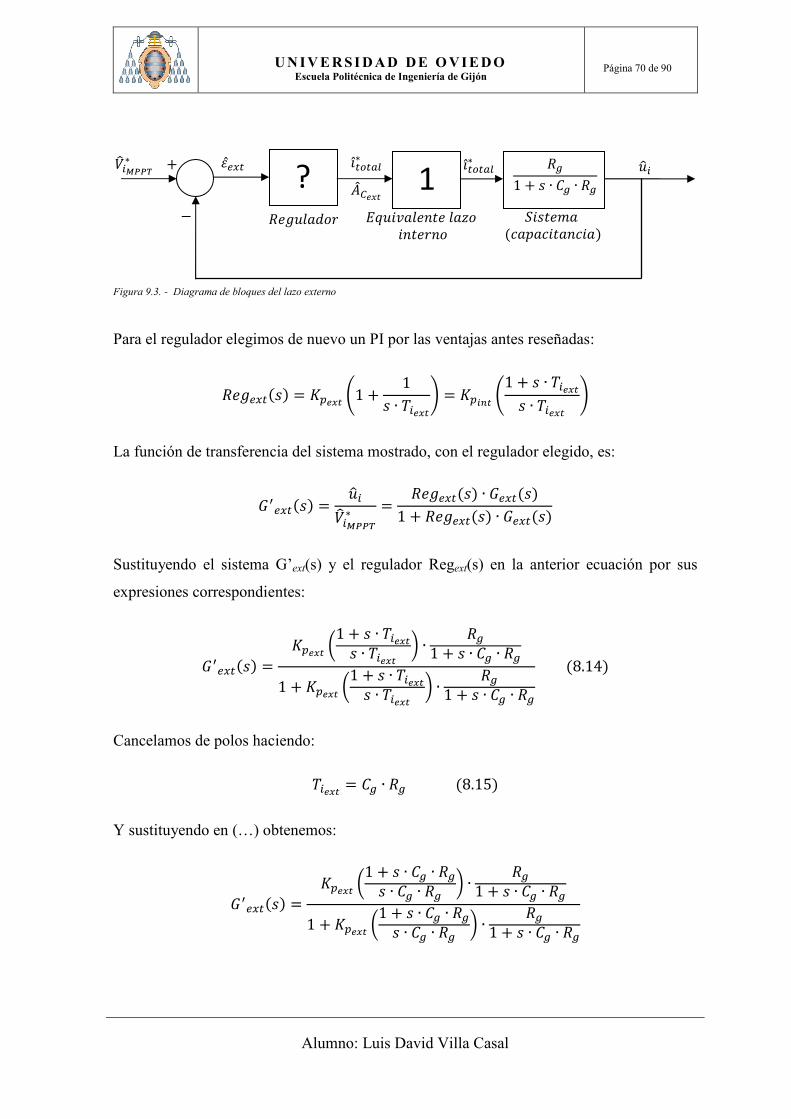
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 70 de 90
Alumno: Luis David Villa Casal
Figura 9.3. - Diagrama de bloques del lazo externo
Para el regulador elegimos de nuevo un PI por las ventajas antes reseñadas:
#cg() = M7ux 1 + 1 ∙ pux = M7yx 1 + ∙ pux ∙ pux
La función de transferencia del sistema mostrado, con el regulador elegido, es:
g() = pKPp ¡¡¢∗ = #cg() ∙ g()1 + #cg() ∙ g() Sustituyendo el sistema G’ext(s) y el regulador Regext(s) en la anterior ecuación por sus
expresiones correspondientes:
g() = M7ux 1 + ∙ pux ∙ pux ∙ 1 + ∙ ∙ 1 + M7ux 1 + ∙ pux ∙ pux ∙ 1 + ∙ ∙
(8.14)
Cancelamos de polos haciendo:
pux = ∙ (8.15) Y sustituyendo en (…) obtenemos:
g() = M7ux 1 + ∙ ∙ ∙ ∙ ∙ 1 + ∙ ∙ 1 + M7ux 1 + ∙ ∙ ∙ ∙ ∙ 1 + ∙ ∙
? 1 + ∙ ∙ KPp ¡¡¢∗ + p
#c$%*," '#-% (&%`%&'%)&'%)6bux
Rg QRGf£∗ −
1 ¤'¥%$#)#$%5, ')#"),
QRGf£∗

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 71 de 90
Alumno: Luis David Villa Casal
g() = M7ux ∙ ∙ 1 + M7ux ∙ ∙
Que deshaciendo el cambio pux = ∙ es igual a:
g() = M7ux ∙ pux1 + M7ux ∙ pux
Operando obtenemos la función de transferencia del lazo externo:
g() = 11 + ∙ puxM7ux ∙
(8.16)
Donde: pux = ∙
Es la constante de tiempo integral
Para determinar la ganancia integral del lazo externo: M7ux de nuevo igualamos
expresiones tal y como hicimos en el apartado anterior:
Deshacemos el cambio:
pux = ∙
Y sustituyendo en la función de transferencia obtenemos:
g() = 11 + ∙ ∙ M7ux ∙

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 72 de 90
Alumno: Luis David Villa Casal
g() = 11 + ∙ M7ux
Igualando para obtener el ancho de banda igual que antes, nos queda:
11 + ∙ 12d ∙ +
= 11 + ∙ M7ux
De la cual obtenemos la relación:
12d ∙ + = M7ux Operando llegamos a la relación:
M7ux = 2d ∙ + ∙ (8.17) Ya tenemos todos los datos necesarios para calcular nuestro regulador PI externo:
#cg() = M7ux 1 + 1 ∙ pux = M7ux 1 + ∙ pux ∙ pux
Donde:
M7ux = 2d ∙ + ∙
pux = ∙
Figura 9.4. - Diagrama de bloques del lazo externo
M7ux 1 + ∙ pux ∙ pux 1 + ∙ ∙ KPp ¡¡¢∗ + p
#c$%*," '#-% (&%`%&'%)&'%)
6bux Rg QRGf£∗ −
1 ¤'¥%$#)#$%5, ')#"),
QRGf£∗

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 73 de 90
Alumno: Luis David Villa Casal
9.3 DISCRETIZACIÓN DE UN REGULADOR PI
Sabemos que un regulador PI en un sistema de control en tiempo continuo tiene la forma:
#c() = M7 1 + 1 ∙ p = M7 1 + ∙ p ∙ p (8.18) Pero en nuestro caso tenemos que implementarlo en un sistema discreto (digital), que se
refrescará cada cierto tiempo Tm, denominado tiempo de muestreo.
Si hacemos:
Mp = 1p (8.19) Llegamos a:
#c() = M7 + Mp (8.20) Mediante la transformación de Tustin:
= 2 · 5 − 15 + 1(8.21) Puede discretizarse el regulador #c(), obteniéndose la expresión en z, #c(5):
#c(5) = M` ·2 · 5 − 15 + 1 + Mp2 · 5 − 15 + 1 = M` · 1 + Mp · 2 · 5 + 15 − 1
Ahora descompondremos en fracciones
"q#q · (5 − 1) = M` · 1(5 − 1) + Mp · 2 · (5 + 1)
"q#q · (1 − 5) = M` · 1(1 − 5) + Mp · 2 · (1 + 5)
"q#q − "q#q 5 = M` · §Mp · 2 + 1 + Mp · 2 − 1 · 5¨

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 74 de 90
Alumno: Luis David Villa Casal
"q#q = M` · §Mp · 2 + 1 + Mp · 2 − 1 · 5¨ + "q#q 5
"q = M` · §Mp · 2 + 1 + Mp · 2 − 1 · 5¨ · #q + "q · 5
Obteniendo finalmente la expresión del regulador en tiempo discreto:
"q = M` · §Mp · 2 + 1 · #q + Mp · 2 − 1 · #q¨ + "q(8.22) Donde:
"q = %&&'ó)*#&,)",$#)$%)'*%*#*#$'#-%#)#$')%)#)
#q = #"","#))'*%*#*#$'#-%#)#$')%)#)
= '#-`,*#-#"#,,*#"#+"#&%-'#),*#$'#-%
Mp = 1p
9.4 VALORES NUMÉRICOS DEL REGULADOR DISCRETO
Hasta ahora nos hemos limitado a exponer cómo se obtienen las fórmulas. A continuación
vamos a hallar los valores numéricos que introduciremos en el programa de control.
Hemos diseñado para que el sistema entre en la rutina de interrupción, donde se refresca el
sistema, cada 500µs (2000Hz). Por lo tanto el tiempo de muestreo:
= 0.0005
Que será común para ambos reguladores, tanto el externo, como el interno.
9.4.1 VALORES DEL REGULADOR DEL LAZO INTERNO
El lazo interno trabajará a 500Hz. Esta frecuencia cumple el criterio de Nyquist para el
filtro antialiasing, que tiene una frecuencia de corte de 2500Hz. Esta frecuencia de 500Hz
está determinada por las limitaciones de procesamiento de las operaciones del

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 75 de 90
Alumno: Luis David Villa Casal
microcontrolador. Una mayor frecuencia no permite tiempo suficiente para que se realicen
las operaciones de control y se producen fenómenos de overflow cada vez que el micro
entra en la interrupción de control sin haber terminado las operaciones del ciclo anterior.
Para más información al respecto, se puede consultar el subcapítulo: “Tiempos de
ocupación del micro”.
Recordando también que la inductancia magnetizante es: L=810x10-6H podemos hallar la
M7yx: M7yx = 2d ∙ + ∙ A = 2d ∙ 500 ∙ 810 ∙ 10B = 2,544
Para nuestro regulador discreto necesitamos también el valor Mp: pyx = AF
Mpyx = 1pyx =FA = 0,4395810 ∙ 10B = 542,6
9.4.2 VALORES DEL REGULADOR DEL LAZO EXTERNO
El lazo externo debe ser más lento que el interno. Una proporción de 10 en la diferencia de
velocidades es la ideal, aunque a partir de 4, el sistema ya puede en muchos casos
funcionar convenientemente. Por lo tanto, elegimos + = 50D5.
Sabiendo que a la entrada tenemos un condensador C=33µF ya tenemos todos los datos
necesarios para hallar la M7ux. M7ux = 2d ∙ + ∙ = 2d ∙ 50 ∙ 33 ∙ 10B = 0,01037
El valor Mp lo obtenemos sabiendo que hemos considerado una = 51,1:
Mpux = 1pux =1 ∙ = 133 ∙ 10B ∙ 51,1 = 593,01

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 76 de 90
Alumno: Luis David Villa Casal
9.5 ADQUISICIÓN DATOS CONTROL
9.5.1 CORRIENTE DE LA BOBINA (I_SENSOR)
Debería medirse siempre en el punto medio de la señal. De esta forma es fácil obtener el
valor medio de la corriente.
Figura 9.1. - En amarillo tenemos la señal del PWM. En verde la señal suministrada por el sensor de corriente LTS 6-NP. Podemos
comparar esta forma de onda con la teórica, donde no se aprecian las irregularidades del inicio y el final de cada tramo, sin duda, generadas por la inductancia de dispersión y las capacidades parásitas.
Lo ideal sería poder medir siempre en la mitad de la rampa de subida utilizando alguna
utilidad de sincronización con el PWM en el punto marcado por el aspa roja de la figura
4.1, a partir de ese punto se podría calcular la corriente media, que es el valor que
necesitamos. En virtud de la simplificación en la programación y en la contención del
costo del microcontrolador, optamos por realizar un filtrado mediante una red RC, donde
reducimos el ancho de banda, pero obtenemos la corriente media mediante hardware,
facilitando la programación del micro.
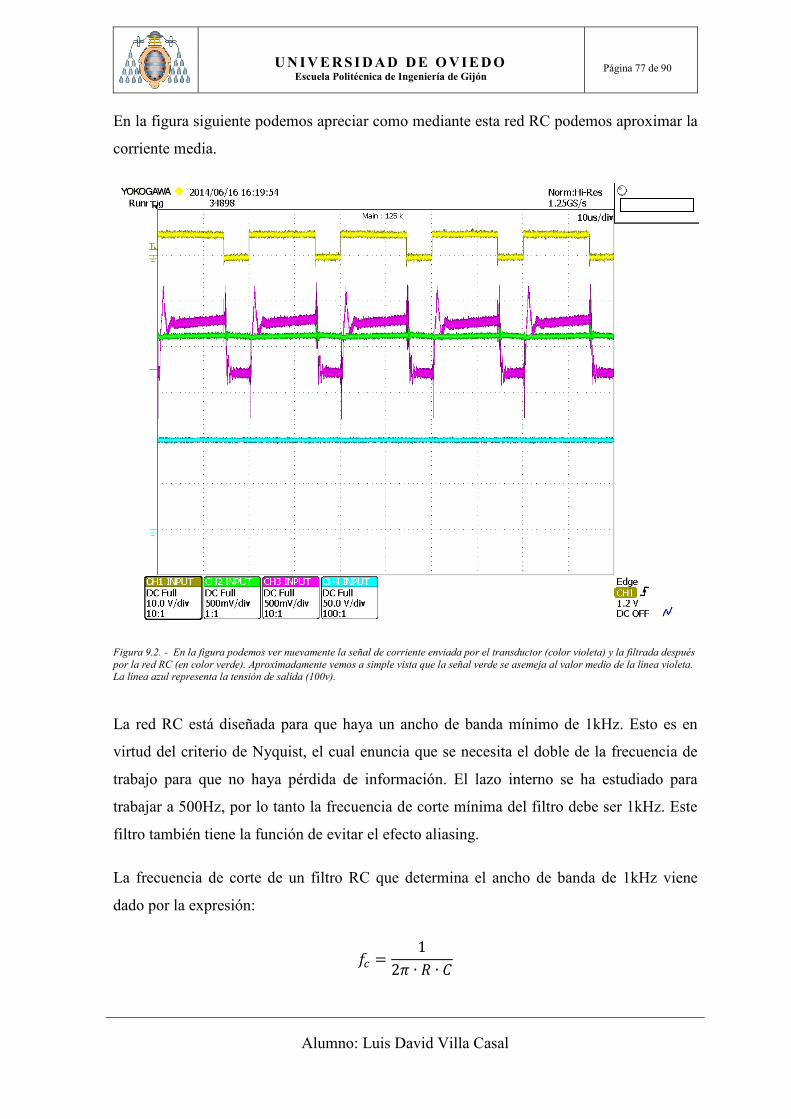
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 77 de 90
Alumno: Luis David Villa Casal
En la figura siguiente podemos apreciar como mediante esta red RC podemos aproximar la
corriente media.
Figura 9.2. - En la figura podemos ver nuevamente la señal de corriente enviada por el transductor (color violeta) y la filtrada después
por la red RC (en color verde). Aproximadamente vemos a simple vista que la señal verde se asemeja al valor medio de la línea violeta. La línea azul representa la tensión de salida (100v).
La red RC está diseñada para que haya un ancho de banda mínimo de 1kHz. Esto es en
virtud del criterio de Nyquist, el cual enuncia que se necesita el doble de la frecuencia de
trabajo para que no haya pérdida de información. El lazo interno se ha estudiado para
trabajar a 500Hz, por lo tanto la frecuencia de corte mínima del filtro debe ser 1kHz. Este
filtro también tiene la función de evitar el efecto aliasing.
La frecuencia de corte de un filtro RC que determina el ancho de banda de 1kHz viene
dado por la expresión:
+ = 12d ∙ ∙
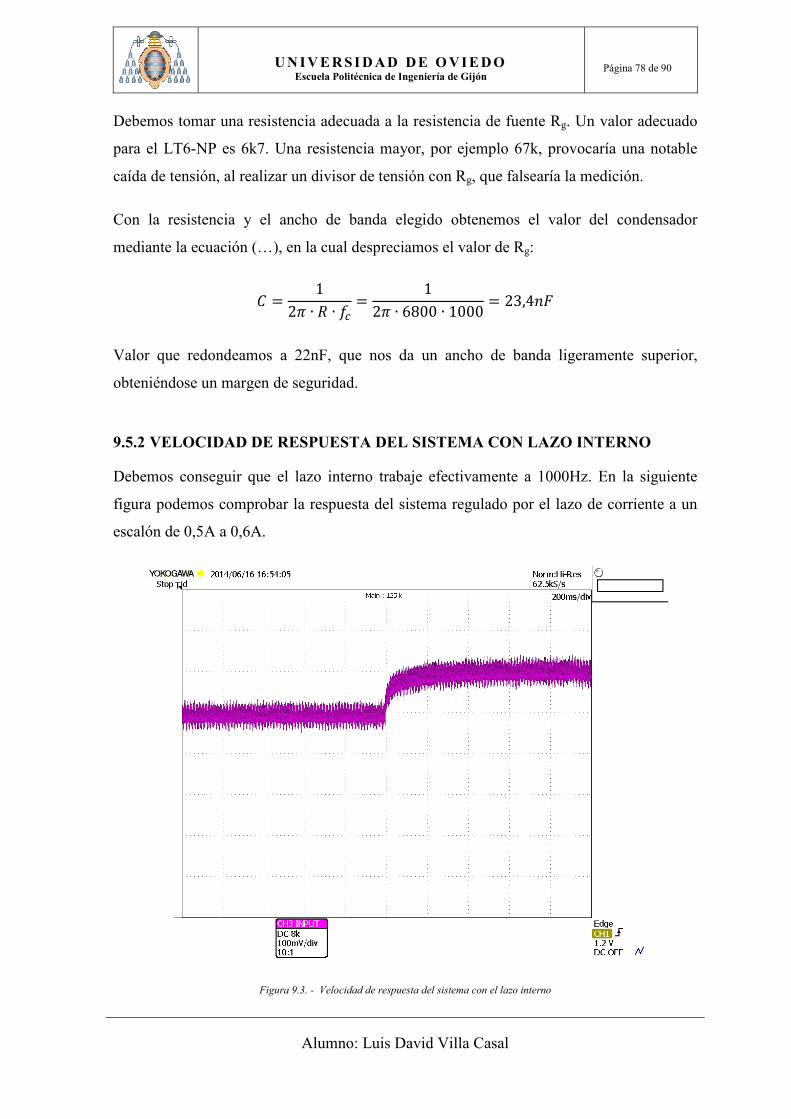
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 78 de 90
Alumno: Luis David Villa Casal
Debemos tomar una resistencia adecuada a la resistencia de fuente Rg. Un valor adecuado
para el LT6-NP es 6k7. Una resistencia mayor, por ejemplo 67k, provocaría una notable
caída de tensión, al realizar un divisor de tensión con Rg, que falsearía la medición.
Con la resistencia y el ancho de banda elegido obtenemos el valor del condensador
mediante la ecuación (…), en la cual despreciamos el valor de Rg:
= 12d ∙ ∙ + = 12d ∙ 6800 ∙ 1000 = 23,4)
Valor que redondeamos a 22nF, que nos da un ancho de banda ligeramente superior,
obteniéndose un margen de seguridad.
9.5.2 VELOCIDAD DE RESPUESTA DEL SISTEMA CON LAZO INTERNO
Debemos conseguir que el lazo interno trabaje efectivamente a 1000Hz. En la siguiente
figura podemos comprobar la respuesta del sistema regulado por el lazo de corriente a un
escalón de 0,5A a 0,6A.
Figura 9.3. - Velocidad de respuesta del sistema con el lazo interno

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 79 de 90
Alumno: Luis David Villa Casal
En esta figura podemos observar que para el 99% del cambio (criterio 5T) tarda 400ms.
Por lo tanto, T=0,08s (12,5Hz). Aquí estamos midiendo la velocidad del sistema trabajando
únicamente el lazo interno con un condensador de salida acoplado de 220µF que simula el
bus de continua.
9.6 TIEMPOS DE OCUPACIÓN DEL MICRO
Durante toda la realización del proyecto hemos encontrado rutinas correctamente
programadas que no funcionaban: conversiones A/D absurdas, comportamientos del
control inexplicables y en definitiva resultados aleatorios. La explicación siempre ha
estado ligada a los tiempos de ocupación del micro:
Figura 9.4. - En violeta el periodo de la interrupción. Marca el tiempo máximo disponible para realizar las operaciones del conversor
A/D y las operaciones algebraicas del lazo de control. En verde está representado el tiempo ocupado durante la interrupción.
El tiempo de procesamiento durante la interrupción es ligeramente variable dependiendo
de la conversión y de los resultados de las operaciones. También comprobamos que el
margen disponible parece que tampoco es demasiado. En el momento que las cantidades a
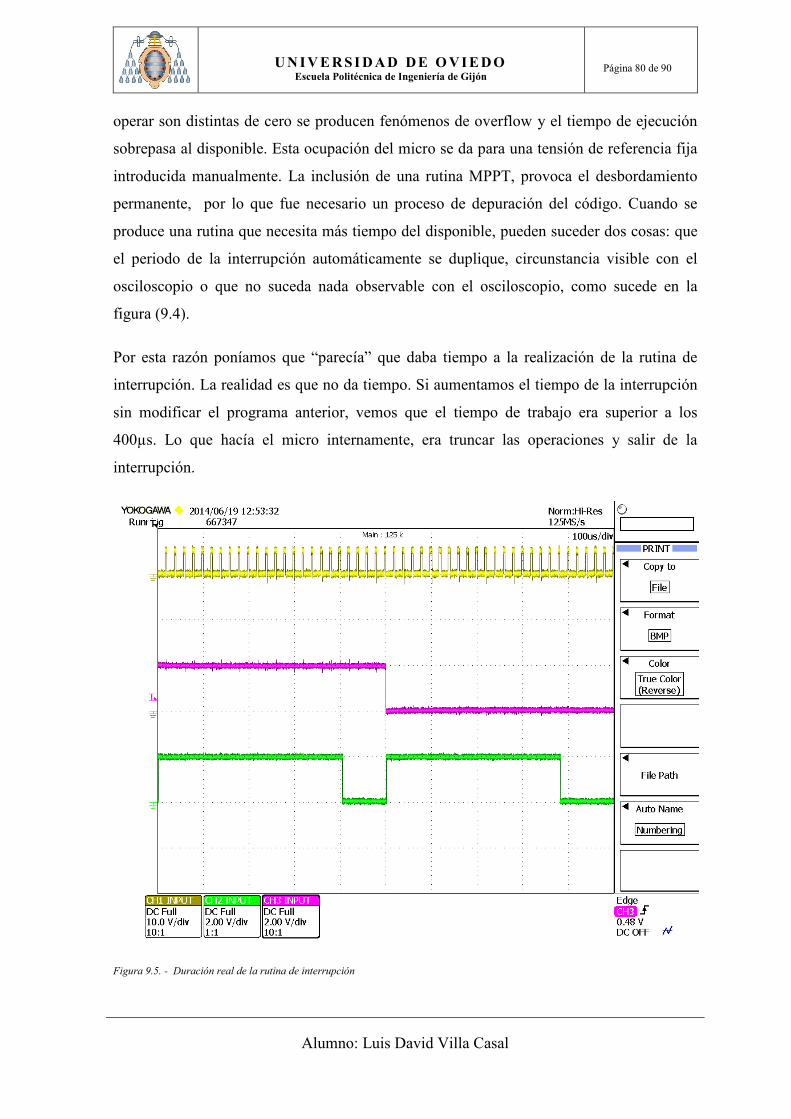
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 80 de 90
Alumno: Luis David Villa Casal
operar son distintas de cero se producen fenómenos de overflow y el tiempo de ejecución
sobrepasa al disponible. Esta ocupación del micro se da para una tensión de referencia fija
introducida manualmente. La inclusión de una rutina MPPT, provoca el desbordamiento
permanente, por lo que fue necesario un proceso de depuración del código. Cuando se
produce una rutina que necesita más tiempo del disponible, pueden suceder dos cosas: que
el periodo de la interrupción automáticamente se duplique, circunstancia visible con el
osciloscopio o que no suceda nada observable con el osciloscopio, como sucede en la
figura (9.4).
Por esta razón poníamos que “parecía” que daba tiempo a la realización de la rutina de
interrupción. La realidad es que no da tiempo. Si aumentamos el tiempo de la interrupción
sin modificar el programa anterior, vemos que el tiempo de trabajo era superior a los
400µs. Lo que hacía el micro internamente, era truncar las operaciones y salir de la
interrupción.
Figura 9.5. - Duración real de la rutina de interrupción

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 81 de 90
Alumno: Luis David Villa Casal
Dando tiempo a 500µs, vemos que efectivamente se estaba desbordando el tiempo de
ejecución sin saberlo.
Figura 9.6. - Ejemplo de desbordamiento de 400µs que provoca duplicamiento del periodo de la interrupción.
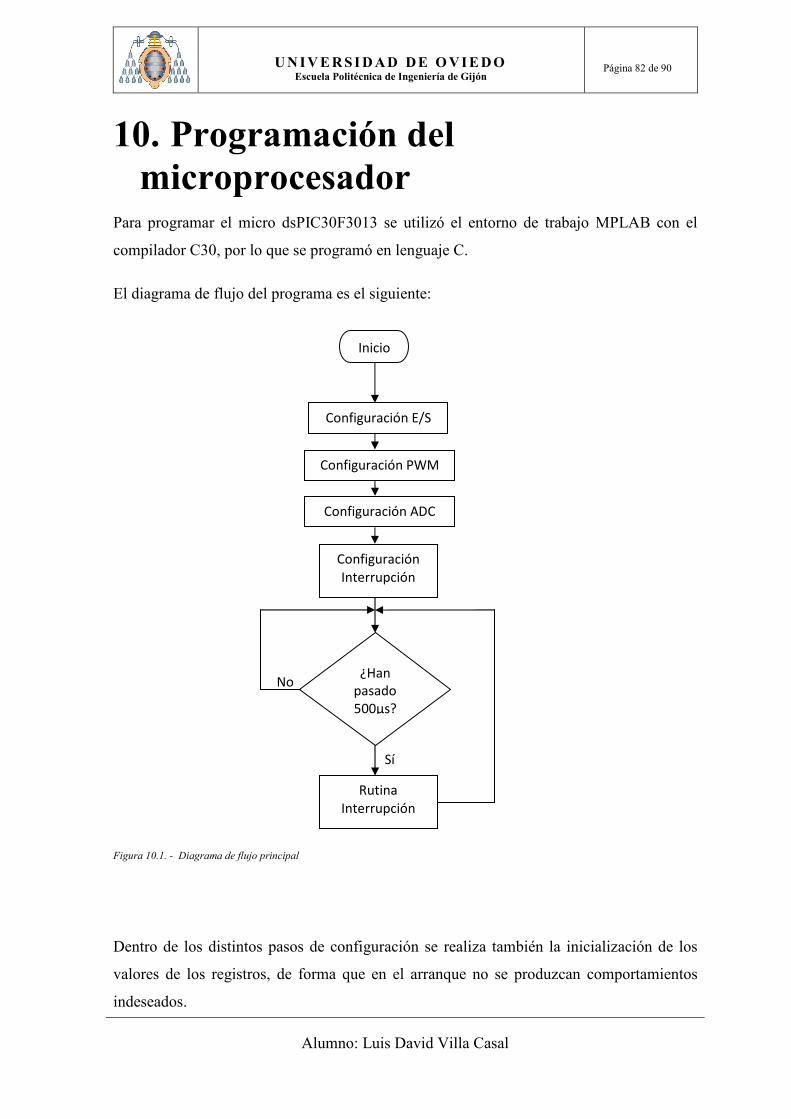
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 82 de 90
Alumno: Luis David Villa Casal
10. Programación del microprocesador
Para programar el micro dsPIC30F3013 se utilizó el entorno de trabajo MPLAB con el
compilador C30, por lo que se programó en lenguaje C.
El diagrama de flujo del programa es el siguiente:
Figura 10.1. - Diagrama de flujo principal
Dentro de los distintos pasos de configuración se realiza también la inicialización de los
valores de los registros, de forma que en el arranque no se produzcan comportamientos
indeseados.
Inicio
Configuración E/S
Configuración PWM
Configuración ADC
Configuración Interrupción
¿Han pasado 500µs?
No
Sí
Rutina Interrupción

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 83 de 90
Alumno: Luis David Villa Casal
Desglose de la rutina de la interrupción:
Inicio interrupción
Arranca ADC
¿Terminó conversión
ADC?
No
Sí
Detiene ADC Guarda valores binarios
Convierte valores binarios en unidades físicas
¿Se ha entrado en la rutina de
interrupción 1000 veces (0,5s)?
Actualiza referencia de tensión (cada 0,5s)
Sí
No
Operaciones del lazo de control para obtener un duty (D) adecuado a la referencia de tensión

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 84 de 90
Alumno: Luis David Villa Casal
Figura 10.2. - Diagrama de flujo de la interrupción
El programa del micro es el siguiente:
//*********************************************************************** /* Programa de Control MPPT */ //*********************************************************************** #include <p30f3013.h> _FOSC(CSW_FSCM_ON & HS2_PLL16); //Reloj externo HS: 11.0592MHz - Fail Safe Clock Monitor Delay: ON _FWDT(WDT_OFF); //Watchdog: OFF _FBORPOR(PBOR_ON & BORV_42 & MCLR_EN); //Brown on reset a 4.2V - Power on reset 64ms - MCLR no es I/O // Periodo de reloj/Ciclo de instrucción = 0.36us @(HS=1,PLL=1) 0.045us @(HS=2,PLL=16) // Periodo 50KHz = 20us // Valor a cargar en PR3 = 55 @11MHz PR3 = 442 @88.5MHz
¿0,2<D<0,8? No
Sí Si D>0,8 D=0,8 Si D<0,2D=0,2 (Anti Wind-Up)
Si D>0,8 D=0,8 Si D<0,2D=0,2 (Anti Wind-Up)
Fin interrupción
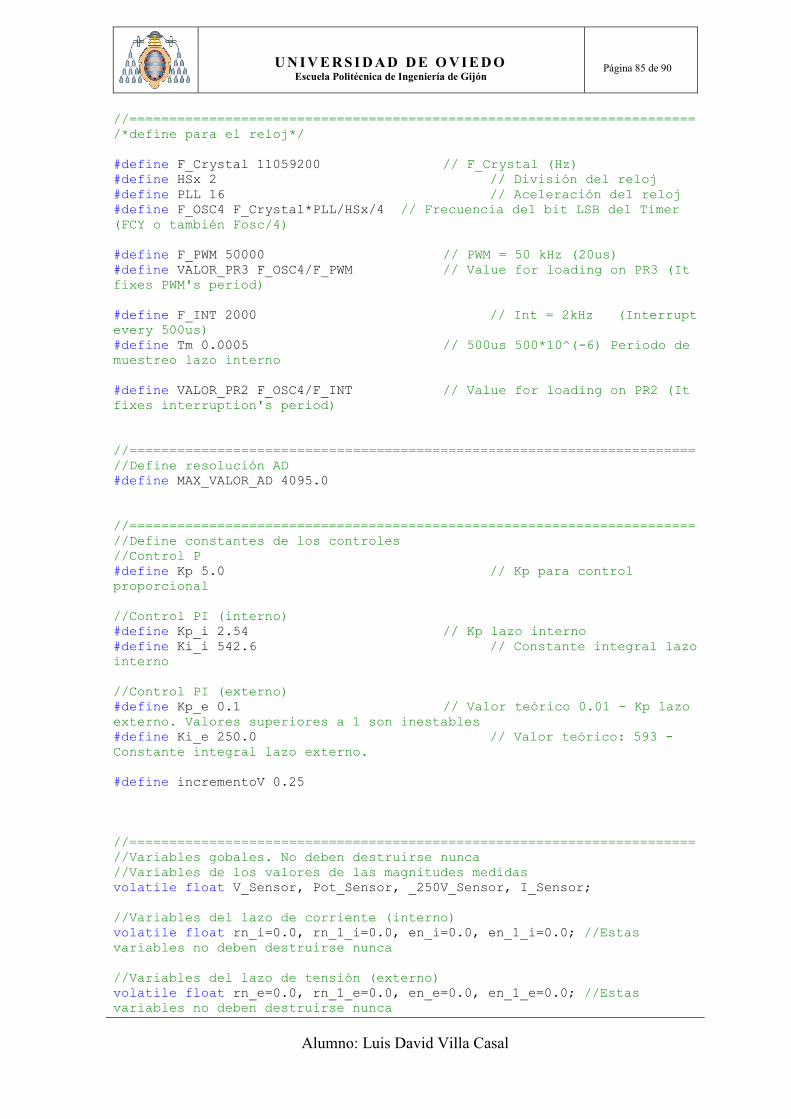
UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 85 de 90
Alumno: Luis David Villa Casal
//======================================================================= /*define para el reloj*/ #define F_Crystal 11059200 // F_Crystal (Hz) #define HSx 2 // División del reloj #define PLL 16 // Aceleración del reloj #define F_OSC4 F_Crystal*PLL/HSx/4 // Frecuencia del bit LSB del Timer (FCY o también Fosc/4) #define F_PWM 50000 // PWM = 50 kHz (20us) #define VALOR_PR3 F_OSC4/F_PWM // Value for loading on PR3 (It fixes PWM's period) #define F_INT 2000 // Int = 2kHz (Interrupt every 500us) #define Tm 0.0005 // 500us 500*10^(-6) Periodo de muestreo lazo interno #define VALOR_PR2 F_OSC4/F_INT // Value for loading on PR2 (It fixes interruption's period) //======================================================================= //Define resolución AD #define MAX_VALOR_AD 4095.0 //======================================================================= //Define constantes de los controles //Control P #define Kp 5.0 // Kp para control proporcional //Control PI (interno) #define Kp_i 2.54 // Kp lazo interno #define Ki_i 542.6 // Constante integral lazo interno //Control PI (externo) #define Kp_e 0.1 // Valor teórico 0.01 - Kp lazo externo. Valores superiores a 1 son inestables #define Ki_e 250.0 // Valor teórico: 593 - Constante integral lazo externo. #define incrementoV 0.25 //======================================================================= //Variables gobales. No deben destruirse nunca //Variables de los valores de las magnitudes medidas volatile float V_Sensor, Pot_Sensor, _250V_Sensor, I_Sensor; //Variables del lazo de corriente (interno) volatile float rn_i=0.0, rn_1_i=0.0, en_i=0.0, en_1_i=0.0; //Estas variables no deben destruirse nunca //Variables del lazo de tensión (externo) volatile float rn_e=0.0, rn_1_e=0.0, en_e=0.0, en_1_e=0.0; //Estas variables no deben destruirse nunca

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 86 de 90
Alumno: Luis David Villa Casal
volatile float I_Sensor_A,Pot_Sensor_A; volatile float iL_i, OC1RS_Provisional, D, Du; volatile float V_Sensor_V, _250V_Sensor_V, uREF_V=0, uREF_1_V; volatile int i, contador; //======================================================================= //Variables MPPT int Contador_MPPT=0; float Power_W=0, Power_1_W=0; float V_Sensor_1_V=0; //======================================================================= // Variables anti-Windup float Exceso_Duty=0.0, AWI=0.0, AWE=0.0, Dlim=0.5; //======================================================================= /*Prototipos*/ void Configura_Entradas_Salidas (void); void Configura_PWM (void); void Configura_Interrupcion (void); void Configura_AD (void); void __attribute__((__interrupt__, __auto_psv__)) _T1Interrupt (void); void Toma_Muestras_x1_Y_Guarda (void); void Lazo_Corriente (void); //======================================================================= /*Funciones*/ void Configura_Entradas_Salidas (void) ADPCFG=0x01F8; //Defino entradas analógicas AN0 AN1 AN2 AN9, resto Digitales //Defino I/O: /* TRIS B*/ TRISBbits.TRISB0 = 1; //Entrada 250V_sensor (ANALOGICA) TRISBbits.TRISB1 = 1; //Entrada I_sensor (ANALOGICA) TRISBbits.TRISB2 = 1; //Entrada V_sensor (ANALOGICA) TRISBbits.TRISB3 = 0; //Salida LED (DIGITAL) TRISBbits.TRISB4 = 0; //Salida LED (DIGITAL) TRISBbits.TRISB5 = 0; //Salida LED (DIGITAL) TRISBbits.TRISB6 = 1; //Entrada Interruptor (DIGITAL) TRISBbits.TRISB7 = 1; //Entrada Interruptor (DIGITAL) TRISBbits.TRISB8 = 0; //Salida PWM (DIGITAL) TRISBbits.TRISB9 = 1; //Entrada Potenciómetro (ANALOGICA) /* TRISC */ TRISCbits.TRISC13 = 1; TRISCbits.TRISC14 = 1; TRISCbits.TRISC15 = 1; // Es entrada del reloj HS /* TRISD */

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 87 de 90
Alumno: Luis David Villa Casal
TRISDbits.TRISD8 = 1; TRISDbits.TRISD9 = 1; /* TRISF */ TRISFbits.TRISF2 = 1; // ¡¡¡Ojo que luego es entrada serial data!!! TRISFbits.TRISF3 = 1; // ¡¡¡Ojo que luego es entrada serial data!!! TRISFbits.TRISF4 = 1; TRISFbits.TRISF5 = 1; TRISFbits.TRISF6 = 1; void Configura_PWM (void) PR3=VALOR_PR3; // Periodo del PWM OC1CON=0x200E; // modo PWM asignado al TMR3 - Stop en idle mode T3CON=0xA000; // Arranca TMR3 - Stop en idle mode OC1RS=2; // Duty del primer ciclo // OC1R no trabaja en modo PWM void Configura_AD (void) // Configura A/D para tomar 4 muestras automáticamente de cada entrada // En total toma 16 muestras: 4 de V_Sensor, 4 de I_Sensor, 4 de _250V_Sensor y 4 de Pot_Sensor /*Valores 0-4095 (12 Bits)*/ //ADPCFG==0x01F8; // Configurado en la parte de Entradas/Salidas; ADCSSL=0x0007; // Configura las entradas a escanear: AN0, AN1, AN2. ADCHS=0x0000; // La tensión de referencia negativa es Vref-. El resto de bits no tienen efecto porque se activará CSCNA (ADCON2) ADCON1=0x20E4; // Control Auto - Para en modo idle - A/D off ADCON2=0x0408; // MUX A - 3 muestras por secuencia- Scan inputs ADCON3=0x0130; // Tad=405us - T conversión una entrada: 7.8us IFS0bits.ADIF=0; // Borra flag interrupción A/D void Configura_Interrupcion (void) T2CON=0x2000; // Sin prescaler - Detención en modo idle TMR2=0; // Ponemos a cero el contador PR2=VALOR_PR2; // Asignamos el periodo a contar IPC1=0x0100; // Asigna prioridad 1 al TMR2 IFS0bits.T2IF=0; // Borra flag de interrupción del TMR2 IEC0bits.T2IE=1; // Habilita interrupción TMR2 T2CONbits.TON=1; // Arranca TMR2

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 88 de 90
Alumno: Luis David Villa Casal
void __attribute__((__interrupt__, __auto_psv__)) _T2Interrupt(void) PORTBbits.RB5=!PORTBbits.RB5; //LED ON de interrupción PORTBbits.RB3=1; // Duración rutina interrupción PORTBbits.RB3=1; // Duración rutina interrupción Toma_Muestras_x1_Y_Guarda(); //Toma valores el ADC y los guarda en los registros //======================================================================= // Lazo_Corriente(); //Pasamos bits a Voltios V_Sensor_V=(V_Sensor/MAX_VALOR_AD)*70.0; _250V_Sensor_V=(_250V_Sensor/MAX_VALOR_AD)*255.0; //Pasamos bits a Amperios Pot_Sensor_A=2*(Pot_Sensor/MAX_VALOR_AD); //Valor en Amperios (max.:2) Primer 2 en la fórmula I_Sensor_A=2*((2*(I_Sensor-2040.0))/MAX_VALOR_AD);//Antes 2040 //Valor en Amperios (max.:2) Primer 2 en la fórmula if(I_Sensor_A<0) //Procesamos datos del sensor I_Sensor_A=0; //======================================================================= ////MPPT // Contador_MPPT++; if(Contador_MPPT==1000) //Con medidas Power_W=V_Sensor_V*I_Sensor_A; if((V_Sensor_V>V_Sensor_1_V)&&(Power_W>Power_1_W)) uREF_V=uREF_V+incrementoV; if((V_Sensor_V<V_Sensor_1_V)&&(Power_W<Power_1_W)) uREF_V=uREF_V+incrementoV; if((V_Sensor_V>V_Sensor_1_V)&&(Power_W<Power_1_W)) uREF_V=uREF_V-incrementoV; if((V_Sensor_V<V_Sensor_1_V)&&(Power_W>Power_1_W)) uREF_V=uREF_V-incrementoV; Power_1_W=Power_W; V_Sensor_1_V=V_Sensor_V; Contador_MPPT=0;

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 89 de 90
Alumno: Luis David Villa Casal
PORTBbits.RB4=!PORTBbits.RB4; //LED de refrescamiento de la referencia (0,5s) //Referencia manual //uREF_V=7; // Quitar para referencia MPPT en_e=uREF_V-AWE-V_Sensor_V; //Regulador PI externo: rn_e=(Kp_e*(((Ki_e*Tm/2)+1)*en_e+((Ki_e*Tm/2)-1)*en_1_e)+rn_1_e); //Acción de control PI en Amperios iL_i=-rn_e/Dlim; // iL_i=Pot_Sensor_A; // Suponemos consigna de Corriente entre 0 y 2A en_i=iL_i-AWI-I_Sensor_A; //Regulador P ó PI (Elegir sólo uno): //Regulador P: // rn_i=Kp*en_i; // Acción de control Proporcional en Amperios //Regulador PI interno: rn_i=Kp_i*(((Ki_i*Tm/2)+1)*en_i+((Ki_i*Tm/2)-1)*en_1_i)+rn_1_i; //Acción de control PI en voltios //Pasamos rn_i (acción de control en voltios) a ciclo de trabajo D (0-1) if ((V_Sensor_V>1)&&(_250V_Sensor_V>1)) D=(rn_i/(V_Sensor_V+(0.21*_250V_Sensor_V))); //0.21=N1/N2 else D=1.0; //Pasamos ciclo de trabajo D (0-1) a bits (0-442) if (D>0.8) Dlim=0.8; else if (D<0.2) Dlim=0.2; else Dlim=D; //AntiWindUp Exceso_Duty=D-Dlim; AWI=V_Sensor_V*Exceso_Duty/Kp_i; AWE=-AWI/Kp_e; en_1_i=en_i; rn_1_i=rn_i; en_1_e=en_e; rn_1_e=rn_e; OC1RS=Dlim*PR3; //Cargamos valor ciclo de trabajo en bits al PWM

UNIVERSIDAD DE OVIEDO Escuela Politécnica de Ingeniería de Gijón
Página 90 de 90
Alumno: Luis David Villa Casal
PORTBbits.RB3=0; // Fin rutina interrupción PORTBbits.RB3=0; // Fin rutina interrupción IFS0bits.T2IF=0; // Borra flag de interrupción del TMR2 void Toma_Muestras_x1_Y_Guarda (void) IFS0bits.ADIF=0; // Borra flag interrupción A/D ADCON1bits.ADON=1; // Arranca el A/D while(!IFS0bits.ADIF); // Conversión hecha? //Almacenamos los resultados obtenidos _250V_Sensor=ADCBUF0; I_Sensor=ADCBUF1; V_Sensor=ADCBUF2; //Pot_Sensor=ADCBUF3; ADCON1bits.ADON=0; // Detiene el A/D. Ya se han tomado las muestras IFS0bits.ADIF=0; // Borra flag interrupción A/D //======================================================================= /*MAIN*/ int main (void) Configura_Entradas_Salidas(); Configura_PWM(); Configura_AD(); Configura_Interrupcion(); while(1);
Figura 10.3. - Programa del microcontrolador