
Estrategia para la identificación y la aplicación de las ...
95
VICERRECTORIA DE ESTUDIOS DE POSGRADO MAESTRÍA EN MATEMÁTICA SUPERIOR Estrategia para la identificación y la aplicación de las funciones Gamma y Beta. Sustentante Ricardo Benjamín Valdez Reyes 2013-1027 Asesor MSc. Francesco Semerari Diciembre 2014
Transcript of Estrategia para la identificación y la aplicación de las ...

VICERRECTORIA DE ESTUDIOS DE POSGRADO MAESTRÍA EN MATEMÁTICA SUPERIOR
Estrategia para la identificación y la aplicación de las
funciones Gamma y Beta.
Sustentante
Ricardo Benjamín Valdez Reyes
2013-1027
Asesor
MSc. Francesco Semerari
Diciembre 2014

DEDICATORIA
A Dios, por ser nuestro Padre y no permitir que desmayemos en este
esfuerzo, que en momentos creíamos inalcanzable.
A mi esposa Esther por su paciencia y comprensión por el tiempo que le
deje de dedicar y por ser luz e inspiración en todo lo que me propongo.
A mis hijos Diana Esther, Richard José y Enmanuel Alexander gracias por
su paciencia y comprensión, espero esto les sirva de ejemplo.
A mis padres por la formación inicial que me inculcaron para que luche
siempre hasta alcanzar la meta en lo que nos propusiéramos.
A UNAPEC, a través de su Departamento de Matemática, encabezado
por la Dra. Génova Feliz, por su política de actualización y capacitación
del personal docente de la cual hemos sido beneficiados.
Al profesor Francesco Semerari por su entrega y paciencia durante
nuestra capacitación y elaboración de este proyecto. Sin sus
orientaciones este trabajo no fuera una realidad.
A mis compañeros de maestría José Armando, Celenia, Dionisio y Joa,
sin ustedes no hubiese sido posible.

“Los matemáticos han intentado en vano,
hasta la actualidad, descubrir algún orden
en la secuencia de números primos, y tenemos
razones para creer que se trata de un misterio
que la mente humana nunca resolverá”.
Leonhard Euler
“Lo que sabemos es una gota de agua;
lo que ignoramos es el océano”.
“Si he logrado ver más lejos ha sido
porque he subido a hombros de gigantes”
Isaac Newton
“Los encantos de esta ciencia sublime,
las matemáticas, sólo se le revelan a aquellos
que tienen el valor de profundizar en ella”.
“Matemática es la reina de las ciencias”.
Carl Friedrich Gauss

RESUMEN
El presente trabajo de investigación fue diseñado para efectuar un aporte
de la problemática en la que se encuentran los estudiantes de la catedra
de Análisis Matemático de la Universidad APEC, los cuales muestran
poco o ningún conocimiento sobre la identificación de las integrales
impropias que pueden ser resueltas a través del uso de las funciones
Gamma y Beta. Debido a su desconocimiento, nos perdemos de
aprovechar las potencialidades que ofrecen estas funciones en distintas
áreas del saber, como es el caso de la ingeniería, la medicina, la
economía, la probabilidad, etc. Además de aplicar estas funciones en
situaciones problemáticas de la vida real, relacionadas con la ingeniería,
que es el área que nos compete. El objetivo de este trabajo es presentar
una estrategia apropiada para la identificación y la aplicación de las
funciones Gamma y Beta, lo cual puede resolver la contradicción entre las
potencialidades de aplicación de las funciones Gamma y Beta y el escaso
conocimiento de ellas, contribuyendo a la formación de un conocimiento
profundo sobre estas funciones y sus aplicaciones. Para realizar esta
estrategia, se sustentara en el método deductivo y se parte de las
integrales impropias especiales de primera y segunda especie, las cuales
nos pueden generar una función Gamma o Beta, analizamos su
convergencia a partir de los parámetros característicos de estas funciones
y procedemos a resolverlas aplicando su definición.
Palabras claves: Integrales impropias, integrales impropias de primera y
segunda especie, convergencia, función Gamma, función Beta.

ÍNDICE
INTRODUCCIÓN ............................................................................................ 1
CAPITULO I: Aspectos Generales Preliminares ......................................... 7
1. Marco de Referencia .............................................................................. 7
1.1. Marco Histórico ............................................................................ 7
1.1.1. Concepto de función ................................................................. 8
1.1.2. Límite de una función ............................................................. 12
1.1.2.1. Evolución histórica del concepto de límite ....................... 12
1.1.3. La pendiente de una recta ...................................................... 22
1.1.4. La derivada de una función .................................................... 22
1.1.5. Origen de la Integral ................................................................ 25
1.1.6. Integral definida e Integral de Riemann................................. 34
1.1.7. Integrales impropias ............................................................... 36
1.2. Marco Socio – Cultural ..................................................................... 37
1.3. Marco Teórico ................................................................................... 37
1.4. Marco Conceptual ............................................................................. 39
1.4.1. Función .................................................................................... 39
1.4.2. Límite de una función ............................................................. 44
1.4.3. La derivada de una función .................................................... 45
1.4.4. Integral definida ....................................................................... 46
1.4.5. Integrales impropias ............................................................... 47
1.4.6. Integrales Impropias Especiales ............................................ 50
1.5. Marco Metodológico ......................................................................... 51
1.5.1. Tipos de investigación ............................................................ 51
CAPITULO II: Funciones Gamma y Beta ................................................... 52
2.1 Funciones Gamma (𝚪) ...................................................................... 52
2.2 Funciones Beta (𝜷) ........................................................................... 58
2.3 Relación entre las Funciones Gamma (𝚪) y Beta (𝜷)..................... 59

2.4 Extensión del concepto de Función Factorial a los números reales
no naturales ............................................................................................. 62
2.5 Extensión del dominio de la Función Gamma (𝚪) de cero y de los
números enteros negativos .................................................................... 64
2.6 Otras definiciones de la Función Gamma (𝚪) según otros autores
................................................................................................................... 65
2.7 Funciones Gamma (𝚪) incompletas ................................................. 67
2.8 El símbolo (𝝀)𝒌 de Pochhammer ...................................................... 67
2.9 La integral de Gauss ......................................................................... 68
2.10 Estrategia para la identificación y aplicación de las funciones
Gamma y Beta .......................................................................................... 70
2.11 Ejemplos prácticos ......................................................................... 71
CONCLUSIÓN .............................................................................................. 86
RECOMENDACIONES ................................................................................. 87
BIBLIOGRAFÍA ............................................................................................ 88

1
INTRODUCCIÓN
Es evidente que las integrales son tan útiles en toda el área del saber,
muy especialmente en la ingeniería y por ello es necesario desarrollar
estrategias que resulten más sencillas y permitan comprender mejor el
proceso de integración de algunas funciones.
Existen algunos tipos de integrales, como son las integrales impropias,
que resolverlas implica que se debe poseer habilidades sobre identidades
trigonométricas, propiedades y leyes de los logaritmos, así como respecto
a la derivación; es por esto que en la búsqueda de métodos alternos, que
le permita a una persona desarrollar habilidades para identificar estos
tipos de integrales impropias y su aplicación, se presenta las funciones
Gamma y Beta como opción a esta situación.
Las funciones Gamma y Beta son de gran utilidad en diferentes áreas del
saber y el desconocimiento de esto ha venido impidiendo un mejor
aprovechamiento de estas funciones en su aplicación.
Se trata de resolver la siguiente situación problémica que está a base de
esta investigación, que es la contradicción entre las potencialidades
de aplicación de las funciones Gamma y Beta y el escaso
conocimiento de ellas.
De esto se desprende que esta investigación tiene como objeto de
estudio el análisis matemático real, delimitando el campo de acción en el
estudio de las funciones Gamma y Beta.
2
En resumen, se cree que la hipótesis de la investigación es válida y
consiste en que si se utiliza una estrategia apropiada para la identificación
y la aplicación de las funciones Gamma y Beta, se puede resolver la
contradicción evidenciada en el problema científico de la investigación,
contribuyendo a la formación de un conocimiento profundo sobre estas
funciones y sus aplicaciones.
Habiendo analizado el problema anterior, surgen las siguientes
interrogantes, a ser satisfechas con la presente investigación:
¿Se podrá presentar una estrategia que resulte atractiva y que
ayude a desarrollar habilidades en los usuarios de este tipo de
integrales?
¿Qué puede estar causando la poca habilidad para identificar las
funciones que pueden ser integradas a través de las funciones
Gamma y Beta?
¿Cómo afecta esta situación la autoestima y la parte intelectual de
los estudiantes?
¿Cuál es el nivel de aceptación por parte de los estudiantes al
conocer este método de resolución?
El objetivo general de la investigación es presentar una propuesta de
estrategia para la identificación y la aplicación de las funciones Gamma y
Beta que facilite la resolución de integrales de ciertos tipos, dar a conocer
su importancia y mostrar la versatilidad en la aplicación de estas
funciones en distintas áreas del saber. Esta investigación estará
acompañada de los siguientes objetivos específicos:
3
Indagar los orígenes de las funciones Gamma y Beta
Definir la funciones Gamma y Beta
Identificar las funciones que se le pueden aplicar esta estrategia.
Relacionar la función Gamma con la función Beta
Aplicar las funciones Gamma y Beta a las funciones a integrar.
Aplicación de las funciones Gamma y Beta en la ingeniería y otras
áreas del saber
Comparar los resultados obtenidos a través de las funciones
Gamma y Beta y los métodos tradicionales.
Estas funciones permiten desarrollar ciertas habilidades, como es el caso
relacionar las integrales con el análisis combinatorio, específicamente el
factorial de un numero complejo, la probabilidad, el mejor conocimiento
de las sucesiones de números, además estas funciones presentan un
crecimiento vertiginoso en distintas áreas del saber, como es la teoría
atómica y nuclear, problemas de tráfico en líneas telefónicas, problemas
de Teoría de la confiabilidad, etc. Si se compara la cantidad de tiempo
que se suele invertir al implementar esta estrategia de resolución de
integrales aplicando las funciones Gamma y Beta y el tiempo que se
invierte al resolver este tipo de problemas a través de los métodos
tradicionales, es notable un ahorro significativo, además de lo ligero que
resulta la resolución de dichos problemas. Es por estas razones que se
establece esta estrategia como útil para que los estudiantes de Análisis
Matemático Real a nivel superior puedan incorporarla en su conjunto de
conocimientos y habilidades.
Las razones por las que se plantea la investigación son de tipo prácticas,
ya que la investigación propuesta ayudará en la solución de problemas de

4
ciertos tipos de integrales especiales y en la toma de decisiones relativo a
cuando usar esta estrategia.
Las integrales impropias son una clase especial de integrales definidas
(integrales de Riemann) en las cuales el intervalo de integración o
la función en el integrando o ambos presentan ciertas características
especiales, como son justamente donde uno o ambos límites de
integración son infinitos o donde el integrando es discontinuo en un
número finito de puntos del intervalo de integración.
La función Gamma aparece en el año 1729 en algunos trabajos de
Leonhard Euler y es lo que se conoce como Integral de Euler de segunda
especie, o función Gamma (𝛤).
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0dt para 𝑛 > 1.
En la cual la condición 𝑥 > 0 es exigida para la convergencia de la
integral.
La integral de Euler de primera especie o función beta se define mediante
otra integral impropia que depende de dos parámetros 𝑛 > 0 y 𝑟 > 0, la
cual está definida por
𝛽(𝑛, 𝑟) = ∫ 𝑥𝑛−11
0(1 − 𝑥)𝑟−1𝑑𝑥.
Para comprender y poder aplicar las funciones Gamma y Beta de una
forma adecuada, existen un gran número de conceptos que deben ser

5
dominados previamente para comprender mejor esta estrategia. A
continuación se presenta algunos de estos:
a) Identidades trigonométricas
b) Propiedades y leyes de los logaritmos
c) La derivación y sus reglas
d) Área bajo curvas
e) Integral definida
f) Integración por partes
g) Integración por sustitución
h) Integrales impropias
i) Integrales impropias de primera y segunda especie
El tipo de estudio en el que se sustentara esta investigación es el método
deductivo. Este método deductivo consiste en la totalidad de reglas
procesos, con cuya ayuda es posible deducir conclusiones finales a partir
de unos enunciados supuestos llamados premisas. Si de
una hipótesis sigue una consecuencia y esa hipótesis se da, entonces,
necesariamente, se da la consecuencia (Tamayo, E., 2009).
El método deductivo es el procedimiento o camino que sigue el
investigador para hacer de su actividad una práctica científica. Este
método tiene varios pasos esenciales: observación del fenómeno a
estudiar, creación de una hipótesis para explicar dicho fenómeno,
deducción de consecuencias o proposiciones más elementales que la
propia hipótesis, y verificación o comprobación de la verdad de los
enunciados deducidos comparándolos con la experiencia. Este método
obliga al investigador a combinar la reflexión racional o momento racional
(la formación de hipótesis y la deducción) con la observación de la

6
realidad o momento empírico (la observación y la verificación) (Valdivia,
E.; de la Cruz, J., 2012).
Esta tesis está estructurada en dos capítulos:
En el primer capítulo se examina los conocimientos previos que se deben
tener para trabajar y/o dominar estas funciones especiales, además de
los procesos históricos que precedieron y que dieron origen a estas
funciones Gamma y Beta. A todo esto se le agrega el bajo conocimiento o
desconocimiento de estas funciones, en lo relativo a su versatilidad y
aplicación en distintas áreas del saber.
En el segundo capítulo, se plantea una Metodología alternativa, a los
métodos de integración más conocidos, como son los casos de la integral
por partes y la sustitución. Como se relacionan estas funciones con el
factorial de un número, la relación entre las funciones Gamma y Beta.
Además en este capítulo, se pone en marcha la identificación, resolución
y aplicación de las funciones Gamma y Beta a situaciones problémicas en
distintas áreas del saber.
7
CAPITULO I: Aspectos Generales Preliminares
1 Marco de Referencia
Es por todos conocido que la formación matemática es base y parte
esencial en la formación de todo profesional, muy especialmente el
ingeniero, de esto se desprende la importancia en su enseñanza y es el
aprendizaje por parte de todos los alumnos de un saber seguro, exacto,
estructurado sistemáticamente y aplicable. En este capítulo se presentara
un resumen del proceso histórico que ha vivido las matemáticas con el
nacimiento del cálculo infinitesimal, a través de nacimiento del concepto
de límite de una función, la derivada y la integral, en este caso definida,
de una función.
1.1. Marco Histórico
El origen del concepto de función ha estado siempre unido al estudio de
los fenómenos sujetos a cambios. Las referencias más antiguas al
concepto de función se encuentran en algunos escritos de astrónomos
babilonios. En la Edad Media el estudio de funciones aparece ligado al
concepto de movimiento, siendo uno de los primeros en realizarlo Nicolás
de Oresme (1323-1392), el cual represento en unos ejes coordenados
gráficos relacionados con el cambio de la velocidad respecto al tiempo.
(Hernández M., Y. N., Pág. 83, 2013).

8
Tres siglos más tarde, Galileo, en 1630, estudio el movimiento desde un
punto de vista cuantitativo, justificándolo experimentalmente y
estableciendo a partir de ello, leyes y relaciones entre magnitudes.
A partir de Galileo, el concepto de función fue evolucionando hasta que a
comienzos del siglo XIX, en 1837, Dirichlet formulo la definición de
función como relación entre dos variables, que es la que actualmente
aceptamos y manejamos. (Hernández M., Y. N., Pág. 83, 2013).
1.1.1. Concepto de función
Vamos a comenzar el estudio de las funciones dando su definición
actualmente aceptada, relativamente moderna para la importancia del
concepto. Para ello, necesitamos conocer primero lo que es una
aplicación.
Una aplicación debe entenderse como cualquier ley que asocie
elementos de un conjunto con elementos de otro conjunto, sin más
condiciones. Este concepto debe refinarse hasta llegar al de función
(Rodríguez, D., 2012).
Usaremos la flecha para indicar el sentido de la aplicación, es decir, cuál
es el conjunto origen y cuál el destino. Lo denotaremos:
𝑠 ∶ 𝑋 → 𝑌
Con ello queremos expresar que la aplicación 𝑠 asocia o relaciona los
elementos de 𝑋 (origen) con los elementos de 𝑌 (destino).

9
Veamos un ejemplo, que nos permita comprender mejor este concepto.
Fuente: Internet
En este ejemplo, la aplicación relaciona los elementos de 𝑋 (números)
con los de 𝑌 (letras). Las flechas indican los elementos emparejados
entre sí:
𝑠 ∶ 1 → 𝑏, 2 → 𝑐, 3 → 𝑑, 4 → 𝑏
Esta aplicación también se puede expresar como conjunto de pares
ordenados: 𝑠 = {(1, 𝑏), (2, 𝑐), (3, 𝑑), (4, 𝑏)} con el criterio de que el primer
valor de cada par pertenece al conjunto origen y el segundo valor del par
pertenece al conjunto destino.
La idea que subyace en el núcleo central del concepto de función, es la
de relación de dependencia entre magnitudes o variables. Al estudiar un
fenómeno cualquiera, se suele observar que las magnitudes o cantidades
que intervienen presentan una relación entre ellas, de forma que una de
las magnitudes depende de la otra. La expresión analítica de esa relación
de dependencia es la función (Rodríguez, D., 2012).
Una función matemática es una aplicación entre dos conjuntos numéricos
de forma que a cada elemento del primer conjunto le corresponde uno y
sólo un elemento del segundo conjunto:

10
𝑓 ∶ 𝑋 → 𝑌
𝑋 → 𝑌 = 𝑓(𝑥)
Al conjunto 𝑋 se le llama Dominio y al conjunto 𝑌 se le llama Imagen.
Y se debe cumplir que:
a) Todos los elementos de 𝑋 están relacionados con elementos de 𝑌.
b) A cada elemento 𝑥 ∈ 𝑋 le corresponde un único elemento 𝑦 ∈ 𝑌.
A la variable 𝑥 se le llama variable independiente, mientras que a la
variable y se le denomina variable dependiente.
Si dos elementos 𝑥 e 𝑦 están relacionados por la función 𝑓, tenemos
que 𝑦 = 𝑓(𝑥). Entonces como 𝑓(𝑥) = 𝑦, diremos que 𝑦 es la imagen de
𝑥 o que 𝑥 es la anti imagen de 𝑦. Las imágenes son elementos del
conjunto imagen y las anti imágenes son elementos del dominio.
Ejemplo:
Supongamos una función 𝑓 que a cada 𝑥 le hace corresponder su
cuadrado:
𝑥 → 𝑓(𝑥) = 𝑥2
Si 𝑥 = 2 entonces 𝑓(2) = 22 = 4
Si 𝑥 = 3 entonces 𝑓(3) = 23 = 8
Entonces:
4 es la imagen de 2 por la función 𝑓 ↔ 2 es la anti imagen de 4.
9 es la imagen de 3 por la función 𝑓 ↔ 3 es la anti imagen de 9.

11
La siguiente aplicación no es función:
X Y
En conclusión, el concepto de función, es sin duda, el más importante y
utilizado en Matemáticas y en las demás ramas de la Ciencia.
Históricamente no fue fácil llegar a él y una gran cantidad de mentes muy
brillantes han dedicado enormes esfuerzos durante siglos para que
tuviera una definición consistente y precisa. (Rodríguez, D., 2012).
Desde los tiempos de Galileo, que fue uno de los primeros en usarlo
(aunque se aclara, no en la forma que hoy la conocemos), pasando por
Newton y Leibniz, que fue el primero que en 1673 uso la palabra "función"
para referirse a la relación de dependencia de dos variables o cantidades,
pero fue Euler, quien le dio su formulación moderna 𝑦 = 𝑓(𝑥). Cauchy,
Dirichlet y Gauss, parte de las mejores mentes de la historia de la
humanidad, le dedicaron su atención y sus desvelos. (Rodríguez, D.,
2012).
12
1.1.2. Límite de una función
El límite de una función junto al de función, es la idea básica del “análisis
o cálculo infinitesimal”, el cual comprende tanto el estudio de la derivada
como el de la integral.
1.1.2.1. Evolución histórica del concepto
de límite
Luego de revisar distintas investigaciones realizadas, la evolución
histórica del concepto de límite se puede dividir en cuatro etapas, las
cuales se diferencian básicamente por la concepción de límite (Ferrante,
J.J.L., 2009).
De Eudoxo de Cnido a la primera mitad del siglo XVIII.
En esta etapa aparece una idea muy intuitiva del proceso del paso al
límite. No existe el concepto como tal, ya que ni siquiera se ha explicitado
el concepto de función, pero sí aparece como proceso implícito en
algunos métodos utilizados, básicamente, para resolver cuatro tipos de
problemas:
Dada la fórmula del espacio en función del tiempo, obtener la
velocidad y aceleración en cualquier instante o recíprocamente,
dada la aceleración o velocidad obtener la fórmula del espacio.
13
Obtención de la tangente a una curva. En óptica es necesario
conocer la normal a una curva y en el estudio del movimiento la
dirección de la tangente. Aparecen problemas de definición de
tangentes en general (cuando surgen nuevas curvas) pues la
definición de tangente como recta que toca en un sólo punto o deja
a un lado la curva sólo sirve para algunas cónicas.
Estudio de máximos y mínimos de una función, relacionado con el
movimiento de los planetas, el movimiento de proyectiles, etc.
Cálculo de áreas acotadas por curvas, volúmenes acotados por
superficies, longitudes de curvas, centros de gravedad y atracción
gravitatoria.
Se presenta a continuación un breve resumen de algunos de estos
métodos infinitesimales.
Método de exhaución. Se atribuye a Eudoxo, aunque su utilización más
conocida la hizo Arquímedes en sobre la esfera y el cilindro y en La
cuadratura de la parábola. El método se aplicaba al cálculo de áreas de
figuras, volúmenes de cuerpos, longitudes de curvas, tangentes a las
curvas, etc. Consiste en aproximar la figura por otras en las que se pueda
medir la correspondiente magnitud, de manera que ésta vaya
aproximándose a la magnitud buscada. Por ejemplo para estimar la
superficie del círculo se inscriben y circunscriben polígonos regulares de
𝑛 lados cuya superficie se conoce (en definitiva es la de 𝑛 triángulos
isósceles) luego se duplica el número de lados de los polígonos inscriptos
y circunscriptos hasta que la diferencia queda exhausta. Arquímedes
halló la superficie del círculo con este método llegando a polígonos de
noventa y seis lados.

14
Método de los infinitésimos de Kepler (1571-1630). Era utilizado para
resolver problemas de medidas de volúmenes o áreas como los que
aparecen en “Nova stereometria doliolum vinatorum”, (Kepler, 1615). La
base del método consiste en pensar que todos los cuerpos se
descomponen en infinitas partes, infinitamente pequeñas, de áreas o
volúmenes conocidos. Galileo utilizará un método semejante para mostrar
que el área encerrada bajo la curva tiempo-velocidad es el espacio.
Método de los indivisibles de Cavalieri (1598-1647). Fue utilizado para
determinar áreas de figuras planas y volúmenes de cuerpos. Cavalieri
representaba estos objetos mediante una superposición de elementos
cuya dimensión era una unidad menor que aquella a evaluar. Lo hace en
su libro “Geometria indivisibilibus continuorum nova quadam ratione
promota”, (Cavalieri, 1635).
“Este caballero merece algo más que una mención por el daño que hizo
en la conceptualización del análisis. No fue un antecesor del cálculo,
fue el que impregnó a muchos bien pensantes hombres que un
infinitésimo es un “cero pequeño”. Es el mismo que logró que se dijese
que la tangente a una curva estaba definida por dos puntos sucesivos
sobre la misma, dado que es como un collar de cuentas muy pequeñas,
una al lado de otra; es el que dijo que una superficie estaba conformada
por líneas sin ancho y que un volumen, un montón de superficies sin
espesor”. (Ferrante, J.J.L., 2009).

15
Método de Fermat para buscar extremos de curvas. Este lo aplicó a
las “parábolas e hipérbolas de Fermat” y consiste en considerar que en
una “cumbre” o en un “valle” de la curva, cuando ε es pequeño, los
valores de la función 𝑓(𝑥) 𝑦 𝑓(𝑥 + 휀) están tan próximos que se pueden
tomar iguales. El método consiste en hacer 𝑓(𝑥 + 휀) = 𝑓(𝑥), dividirlo por
휀 y tomar 휀 = 0. Si bien no habla de límite, está bastante cerca.
Método de las tangentes. Fermat envía a Mersenne en 1637 una
memoria que se titula Sobre las tangentes a las líneas curvas donde
parece plantear un método para calcular tangentes en un punto de
cualquier curva, si bien sólo lo utiliza con la parábola. En un intento de
clarificar dicho método, Descartes crea el suyo propio según reza en la
carta que envía a Mersenne en Mayo de 1638 y, así, considera que la
curva y su tangente en un punto coinciden en un entorno pequeño de
dicho punto. Lo que pretende es dibujar la recta tangente en el punto
𝑃 = (𝑥, 𝑓(𝑥)) y, para ello, calcula la subtangente utilizando un criterio de
semejanza de triángulos. En la práctica, para obtener los segmentos
necesarios se consideraba 𝑓(𝑥 + 휀) − 𝑓(𝑥), se dividía por 휀 y se tomaba
휀 = 0, lo que equivale a hallar el límite funcional en la abscisa del punto 𝑃.
Método de Barrow (1630-1677). Su método es muy semejante al de
Fermat, pero en él aparecen dos incrementos 𝑒 y 𝑎, que equivalen a
los 𝛥𝑥 y 𝛥𝑦 actuales.

16
Todos estos métodos fueron el germen del análisis infinitesimal y
surgieron motivados por las exigencias de la mecánica, de la astronomía
y de la física. El álgebra aportó las herramientas necesarias para que
algunos de estos métodos se desarrollaran, destacando el método de las
coordenadas, que facilitó el estudio de las curvas. Sin embargo, estos
métodos funcionaban de forma separada y no se tenía conciencia de su
generalidad; faltaba algo que les armonizara y además les diera ese
carácter de universalidad (Ferrante, J.J.L., 2009).
a) Nacimiento del concepto de límite
Isaac Newton (1648-1727) es el creador de la teoría de las fluxiones, un
método de naturaleza geométrico-mecánica para tratar de forma general
los problemas del análisis infinitesimal. Propone el método de las
fluxiones, expuesto en la obra “Methodus fluxionum et serierum
infinitorum” (Newton, 1736), donde se estudian las magnitudes variables,
introducidas como abstracción de las diferentes formas del movimiento
mecánico continuo denominadas fluentes. Todas las fluentes son
variables dependientes y tienen un argumento común, el tiempo. Después
se introducen las velocidades de la corriente de los fluentes, que se
denominan fluxiones (Ferrante, J.J.L., 2009).
La teoría de fluxiones resuelve dos problemas: la determinación de la
relación entre fluxiones, conocidas la relación entre fluentes y el
recíproco, dada la relación entre fluxiones, encontrar las fluentes Para
resolver estos problemas aplicó sendos métodos basados en el uso de
cantidades infinitamente pequeñas. Para el propio Newton en estos
métodos resolutivos no se explicaban de forma satisfactoria. En 1704 en
su obra “Tractatus quadratura curvarum”, explicita el método de las
"razones primeras y últimas", en la que el incremento de la variable se

17
"desvanece", lo que supone la explicitación de una idea de límite un tanto
metafísica. Allí resuelve el siguiente problema:
“Fluya una cantidad x uniformemente; ha de encontrarse la fluxión de la
cantidad 𝑥𝑛. En este tiempo, la cantidad 𝑥, al fluir, se convierte en 𝑥 + 0,
la cantidad 𝑥𝑛 resultará (𝑥 + 0)𝑛; que por el método de las series infinitas
es 𝑥𝑛+𝑛0𝑥𝑛−1 + ((𝑛2 − 𝑛)/2)02𝑥2 − 2 +…. Y los incrementos 0 y
𝑛𝑜𝑥𝑛 − 1 + ((𝑛2 − 𝑛)/2)𝑜2𝑥𝑛 − 2 + 𝑒𝑡𝑐., estarán entre sí como 1 y
𝑛𝑥𝑛−1 + (𝑛2−𝑛
2) 0𝑥𝑛−2 +… Desvanézcanse ahora aquellos incrementos, y
su última razón será 1 a 𝑛𝑥𝑛−1. Y por eso, la fluxión de la cantidad 𝑥 es a
la fluxión de la cantidad 𝑥𝑛 como 1 a 𝑛𝑥𝑛−1 ”.
En su obra Principia Mathematica, Newton aclara el concepto de límite:
"Cantidades, y la razón de cantidades, que en cualquier intervalo finito de
tiempo convergen continuamente a la igualdad, y que antes del final de
dicho tiempo se aproximan una a la otra más que cualquier diferencia
dada, se hacen finalmente iguales".
Gottfried Wilhelm Leibniz (1646-1716), por su parte preocupado por la
claridad de los conceptos y el aspecto formal de la matemática,
contribuye al nacimiento del análisis infinitesimal con su teoría sobre las
diferenciales. Se dio cuenta de que la pendiente de la tangente a una
curva depende de la razón entre las diferencias de las ordenadas y de las
abscisas, cuando se hacen infinitamente pequeñas estas diferencias. Usa
una notación que perdura actualmente, pero no aclara lo que, para él
significa “infinitamente pequeño”. Pero peor, a veces habla de
"infinitamente, infinitamente pequeño".

18
La concepción que subyace en esta etapa es una concepción geométrica
de límite puesto que se trabaja en problemas de índole geométrica. La
noción de límite en realidad se encuentra implícita, y se ve una evolución
de su estatus, pasando de ser una noción que ni siquiera se explicita
como útil al ser, con los infinitésimos y las razones primeras y últimas de
Newton, una herramienta para resolver problemas.
Ahora bien, esta idea de límite como aproximación sin más no basta. Por
una parte, la aproximación tiene que ser indefinida, es decir, tiene que
existir la posibilidad de tomar aproximaciones cada vez mejores, cosa que
se consigue en todos los métodos revisados, pero hasta Newton esta
posibilidad no se plasma claramente en el hecho de que los objetos se
han de aproximar “más que cualquier diferencia dada”, lo cual implica que
el límite debe ser la mejor de todas las aproximaciones posibles.
b) Segunda mitad del siglo XVIII. Transformación de los
fundamentos del análisis infinitesimal.
Utilizando infinitésimos pequeños y grandes, que surgen de la teoría de
las razones primeras y últimas de Newton, los matemáticos de la época
obtienen solución para muchos de sus problemas. La dificultad más
importante para el desarrollo del análisis infinitesimal era la necesidad de
extender las operaciones del análisis a un mayor número de funciones,
para lo que se requería una idea clara de dependencia funcional y, para
ello, fue necesario investigar el significado del concepto de función y sus
manipulaciones algebraicas. Los matemáticos del siglo XVIII, que se
preocuparon de la fundamentación del análisis, buscaban eliminar
lagunas y clarificar los matices místicos, no se dieron cuenta de la
necesidad del concepto de límite. (Ferrante, J.J.L., 2009).

19
Leonhard Paul Euler (1707-1743) toma como punto de partida el cálculo
diferencial de Leibniz y el método de fluxiones de Newton y los integra en
una rama más general de las matemáticas, que, desde entonces, se
llama Análisis y se ocupa del estudio de los procesos infinitos. Se plantea
la regularidad de las funciones, introduciendo la función continua como
sumas, productos y composiciones de funciones elementales.
Jean le Rond D'Alembert (1717-1783) crea la teoría de los límites al
modificar el método de las primeras y últimas razones de Newton. En el
tomo IX de la “Encyclopédie”, D´Alembert escribe la siguiente definición
de límite:
“Se dice que una cantidad es límite de otra cantidad, cuando la segunda
puede aproximarse a la primera más que cualquier cantidad dada por
pequeña que se la pueda suponer, sin que, no obstante la cantidad que
se aproxima pueda jamás sobrepasar a la cantidad a la que se aproxima;
de manera que la diferencia entre una tal cantidad y su límite sea
absolutamente inasignable”.
En esta definición las variables son monótonas y el límite unilateral, es
decir, la magnitud que se aproxima no le puede superar, y así, aunque la
aproximación es objetiva no se puede tener un control completo de la
misma.
Joseph-Louis Lagrange (1736-1813) trabajó con desarrollos de funciones
en series de potencias Los resultados conseguidos le hicieron creer que
se podían evitar los límites y continuó haciendo desarrollos en series de
potencias, sin darse cuenta de que la convergencia de las mismas
necesitaba del concepto de límite.

20
c) Siglo XIX y principios del siglo XX. Aritmetización del análisis.
A finales del siglo XVIII y comienzos del XIX las obras de un gran número
de matemáticos ya reflejaban la necesidad objetiva de construcción de la
teoría de límites como base del análisis matemático y una reconstrucción
radical de este último, en la que fueron determinantes la clarificación del
concepto de función, la aparición de nuevos problemas matemáticos y
físicos, y la evolución de la enseñanza de las matemáticas, que tras la
revolución francesa pasa de ser una disciplina obligatoria en la escuela
normal superior y en la politécnica. De estos matemáticos se destacan
Cauchy, Bolzano y Weierstrass (Ferrante, J.J.L., 2009).
Augustin Louis Cauchy (1789-1857). Este retoma el concepto de límite de
D'Alembert, rechazando el planteamiento de Lagrange, prescinde de la
geometría, de los infinitésimos y de las velocidades de cambio, dándole
un carácter más aritmético, más riguroso pero aún impreciso. La
definición de límite que propone Cauchy (1821) es la siguiente:
“…, cuando los sucesivos valores que toma una variable se aproximan
indefinidamente a un valor fijo, de manera que terminan por diferir de él
en tan poco como queramos, este último valor se llama el límite de todos
los demás”.
La noción de límite dada por D’alembert es más objetiva que la de
Cauchy, ya que en ésta aparece el término "tanto como queramos" que la
hace subjetiva. Define además infinitésimos como una cantidad variable
que converge a cero Cauchy basa todo el análisis en el concepto de
límite.

21
Bernard Placidus Johann Nepomuk Bolzano (1781-1848) da una
definición de continuidad basada en la de límite. De hecho la obra de
Bolzano se desarrolla de forma paralela a la de Cauchy, basada en la
misma idea de límite.
Karl Theodor Wilhelm Weierstrass (1815-1897) contribuyó con notoriedad
a la aritmetización del análisis, dando una definición satisfactoria de
número real y otra del concepto de límite. Weierstrass criticó la expresión
"la variable se acerca a un límite" puesto que, según él, esto sugiere
tiempo y movimiento, y dio una formulación métrica, puramente estática,
definición bastante cercana a la que se utiliza hoy en día. Esta definición,
que aparece en la obra de su discípulo Heine Elemente, es la siguiente:
"Si, dado cualquier ε, existe un no, tal que para 0 < 𝑛 < 𝑛0, la diferencia
𝑓(𝑥𝑜 ± 𝑛) − 𝐿 es menor en valor absoluto que ε, entonces se dice que 𝐿
es el límite de 𝑓(𝑥) para 𝑥 = 𝑥0".
La noción de límite es ya, en esta etapa, una noción matemática que sirve
como soporte a otras como la continuidad, la derivada y la integral, hecho
que ha contribuido a un uso universalizado de la misma. Sin embargo,
esta definición, que evoluciona desde la concepción dinámica de Cauchy
a una concepción estática, no es el final de un largo proceso evolutivo, ya
que en el siglo XX surgen concepciones de tipo topológico, ligadas a la
generalización de los conceptos del cálculo a conjuntos no
necesariamente numéricos, lo que constituye una cuarta etapa en el
desarrollo del concepto (Ferrante, J.J.L., 2009).

22
1.1.3. La pendiente de una recta
Se denomina pendiente a la inclinación de un elemento ideal, natural o
constructivo respecto de la horizontal (la tangente inversa del valor de la
"𝑚" es el ángulo en radianes (Ecured, 2014).
La pendiente de una recta es la tangente del ángulo que forma la recta
con la dirección positiva del eje de abscisas. Sean
𝑃1 (𝑥1; 𝑦1) 𝑦 𝑃2(𝑥2; 𝑦2), dos puntos de una recta, no paralela al eje 𝑌; la
pendiente:
𝑚 =𝑦2 − 𝑦1
𝑥2 − 𝑥1
Es la tangente del ángulo que forma la recta con el semieje 𝑥 positivo.
Si 𝑚 > 0 se dice que la pendiente es positiva, si 𝑚 < 0 se dice que la
pendiente es negativa, si 𝑚 = 0 la recta es paralela al eje (𝑥) del plano
cartesiano, y si la pendiente es indefinida la recta es paralela al eje (𝑦)
del plano cartesiano.
1.1.4. La derivada de una función
Galileo Galilei (1564 - 1642), al describir por vez primera una función que
relacionaba el espacio y el tiempo en la caída de los cuerpos, había
dejado abierta la necesidad del Cálculo Diferencial; el cálculo con
derivadas.
23
La derivada, en general, expresa el ritmo de cambio instantáneo en
cualquier fenómeno funcional. Pero, cuando se trata de cuerpos en
movimiento, esta interpretación es especialmente precisa e interesante.
De hecho, históricamente fue la que dio origen al estudio de las derivadas
(Sorando, J.M., 2002).
En cualquier movimiento, el espacio recorrido s es función del tiempo
transcurrido: 𝑠 = 𝑠 (𝑡)
La tasa de variación entre dos instantes 𝑡 = 𝑎 y 𝑡 = 𝑏 es el espacio
recorrido en ese intervalo de tiempo:
𝑠 (𝑏) – 𝑠 (𝑎)
La tasa de variación media en ese mismo intervalo es conocida como
velocidad media:
𝑣𝑚 =𝑠 (𝑏) – 𝑠 (𝑎)
𝑏 − 𝑎
Cuando el intervalo de tiempo [a, b] es infinitesimal, casi cero, ésa es la
velocidad instantánea:
𝑣𝑖(𝑎) = 𝑙𝑖𝑚𝑎→𝑏
𝑠(𝑏) – 𝑠 (𝑎)
𝑏 − 𝑎
A este límite se le llama derivada. Es decir: la velocidad instantánea en un
momento dado, es la derivada del espacio como función del tiempo en
ese momento:
𝑣𝑖(𝑎) = 𝑠’(𝑎)
A su vez, la velocidad cambia a lo largo del tiempo, también es función
del tiempo:
𝑣𝑖(𝑡) = 𝑠’(𝑡)

24
La tasa de variación entre dos instantes 𝑡 = 𝑎 y 𝑡 = 𝑏 es la
aceleración experimentada en ese intervalo de tiempo:
𝑎𝑚 = 𝑣𝑖(𝑏) – 𝑣𝑖(𝑎) = 𝑠’(𝑏) – 𝑠’ (𝑎)
La tasa de variación media en ese mismo intervalo es conocida
como aceleración media:
𝑎𝑚 =𝑠’ (𝑏) – 𝑠’ (𝑎)
𝑏 − 𝑎
Cuando el intervalo de tiempo [a, b] es infinitesimal, casi cero, ésa es
la aceleración instantánea:
𝑎𝑖(𝑎) = 𝑙𝑖𝑚𝑎→𝑏
𝑠’ (𝑏) – 𝑠’ (𝑎)
𝑏 − 𝑎
Es decir: la aceleración instantánea es la derivada de la velocidad como
función del tiempo en un momento dado. Y por ser derivada de una
derivada, se dice que es la derivada segunda del espacio con respecto al
tiempo en ese momento:
𝑎𝑖(𝑎) = 𝑣𝑖 ’(𝑎) = [ 𝑠’]’(𝑎) = 𝑠”(𝑎)
Isaac Newton y Gottfried Wilhelm Leibniz, ambos por separado y casi a la
vez, continuaron lo que Galileo comenzó, lo cual originó una fuerte
disputa entre ellos.

25
“Newton y Leibniz iniciaron el Cálculo Diferencial y, al medir el ritmo de
cambio de los fenómenos físicos, naturales e incluso sociales, abrieron
las puertas al espectacular desarrollo científico y tecnológico que ha
transformado el mundo en 3 siglos tanto o más que en toda la historia
anterior. Parecía que por fin se había cumplido el sueño pitagórico:
explicar el mundo con Matemáticas” (Sorando, J.M., 1982).
1.1.5. Origen de la Integral
Al inicio del siglo XVII es, justamente después de la aparición del
concepto de función, cuando comienza a tomar forma el cálculo, que
junto con la geometría analítica es “la mayor creación de todas las
matemáticas” (Boyer, C., 2007). En esos tiempos existían cuatro tipos de
problemas principalmente:
1). Dada la fórmula de la distancia que un cuerpo recorre como función
del tiempo, obtener la velocidad y la aceleración en cada instante; y, al
revés, dada la fórmula de la aceleración de un cuerpo como función del
tiempo, obtener la velocidad y la distancia recorrida. Este problema surge
directamente del estudio del movimiento.
2). Obtener la tangente a una curva, como consecuencia de las
aplicaciones de la óptica y el estudio del movimiento.
3). Obtener el valor máximo o mínimo de una función para aplicarlo al
problema del tiro parabólico y el estudio del movimiento de los planetas.

26
4). Obtener longitudes de curvas; las áreas acotadas por curvas; los
volúmenes acotados por superficies; los centros de gravedad y la
atracción gravitatoria entre cuerpos extensos.
Pero en aquel entonces aún no había constancia de la estrecha relación
existente entre los cuatro problemas.
Los griegos ya habían aplicado métodos exhaustivos para el cálculo de
áreas y volúmenes. A pesar del hecho de que lo aplicaban para áreas y
volúmenes relativamente sencillos, tenían que utilizar mucha
ingeniosidad, porque al método le faltaba generalidad, y no obtuvieron
respuestas numéricas muy a menudo. Fue con los trabajos de
Arquímedes con los que se volvió a despertar en Europa el interés por
obtener longitudes, áreas, volúmenes y centros de gravedad. El Método
exhaustivo se modificó primero gradualmente, y después radicalmente
por la invención del cálculo.
Los trabajos del siglo XVII al respecto de este cuarto problema comienzan
con Kepler, de quien se dice que se interesó por el problema de los
volúmenes porque notó la falta de precisión de los métodos utilizados por
los tratantes de vinos para obtener el volumen de los barriles. Este trabajo
(en “Stereometria Dolorium”) es tosco para los niveles actuales; por
ejemplo, el área de un círculo es el área de un número infinito de
triángulos, cada uno con un vértice en el centro y una base en la
circunferencia. De la fórmula del área de un polígono regular inscrito en
una circunferencia, la mitad del perímetro por la apotema, obtenía el área
del círculo. De forma análoga, consideraba el volumen de la esfera como
la suma de los volúmenes de pequeños conos cuyos vértices están en el
centro de la esfera y cuyas bases están en la superficie. Así demostró
que el volumen de la esfera es un tercio del radio por la superficie.

27
Consideró el cono como una suma de discos circulares muy estrechos y
así pudo calcular su volumen. (García, V., 2008).
Galileo, en dos nuevas ciencias, concibe las áreas de un modo parecido a
Kepler; al tratar el problema del movimiento uniformemente acelerado,
presentó un razonamiento para mostrar que el área de la curva tiempo-
velocidad es la distancia.
Bonaventura Cavalieri (1598-1647), discípulo de Galileo y profesor en un
liceo de Bolonia fue influido por Kepler y Galileo, y fue estimulado por
este último para interesarse por problemas del cálculo. Cavalieri
desarrolló las ideas de Galileo y otros sobre los indivisibles mediante un
método geométrico, y publicó un trabajo sobre el tema, “Geometría
Indivisibilibus Continuorum Nova quadam Ratione Promota” (“Geometría
superior mediante un método bastante desconocido, los indivisibles de los
continuos”, Cavalieri, 1635). Considera un área como constituida por un
número indefinido de rectas paralelas y equidistantes y un volumen como
compuesto por un número indefinido de áreas planas paralelas; a estos
elementos los llama los indivisibles de área y volumen respectivamente.
En líneas generales los indivisibilistas mantenían, como expresa Cavalieri
en sus “Exercitationes Geometricae Sex” (Cavalieri, 1647), que una línea
está hecha de puntos como una sarta de cuentas; el plano está hecho de
líneas, como un tejido de hebras y un sólido de áreas planas como un
libro de hojas, sin embargo aceptaban un número infinito de elementos
constituyentes. (García, V., 2008).

28
El método o principio de Cavalieri puede ilustrarse mediante la
proposición siguiente que, por supuesto puede, demostrarse de otras
formas. Para demostrar que el paralelogramo ABCD tiene área doble que
cualquiera de los triángulos ABD o BCD, hace notar que cuando GD = BE,
se tiene que GH = FE.
Fuente: Internet
Por tanto los triángulos 𝐴𝐵𝐷 y 𝐵𝐶𝐷 están constituidos por igual número de
líneas iguales, tales como 𝐺𝐻 y 𝐸𝐹, y por tanto tienen que tener áreas
iguales.
Este mismo principio está incluido en la proposición que se enseña
actualmente en los libros de geometría de sólidos y que se conoce como
teorema de Cavalieri. Con este método encontró el área acotada bajo
funciones del tipo 𝑓(𝑥) = 𝑥𝑛 para 𝑛 = 1, 2, 3, 4, 5, 6, 9. Sin embargo, su
método era enteramente geométrico.
Roberval, utilizó esencialmente el método de los indivisibles para obtener
el área encerrada bajo un arco de cicloide, un problema sobre el que
Mersenne había llamado su atención en 1629. Denominó a su método el
“método de las infinidades”, aunque utilizó como título de su trabajo “el de
Traité des Indivisibles” (Roberval, 1634).
29
Fuente: Internet
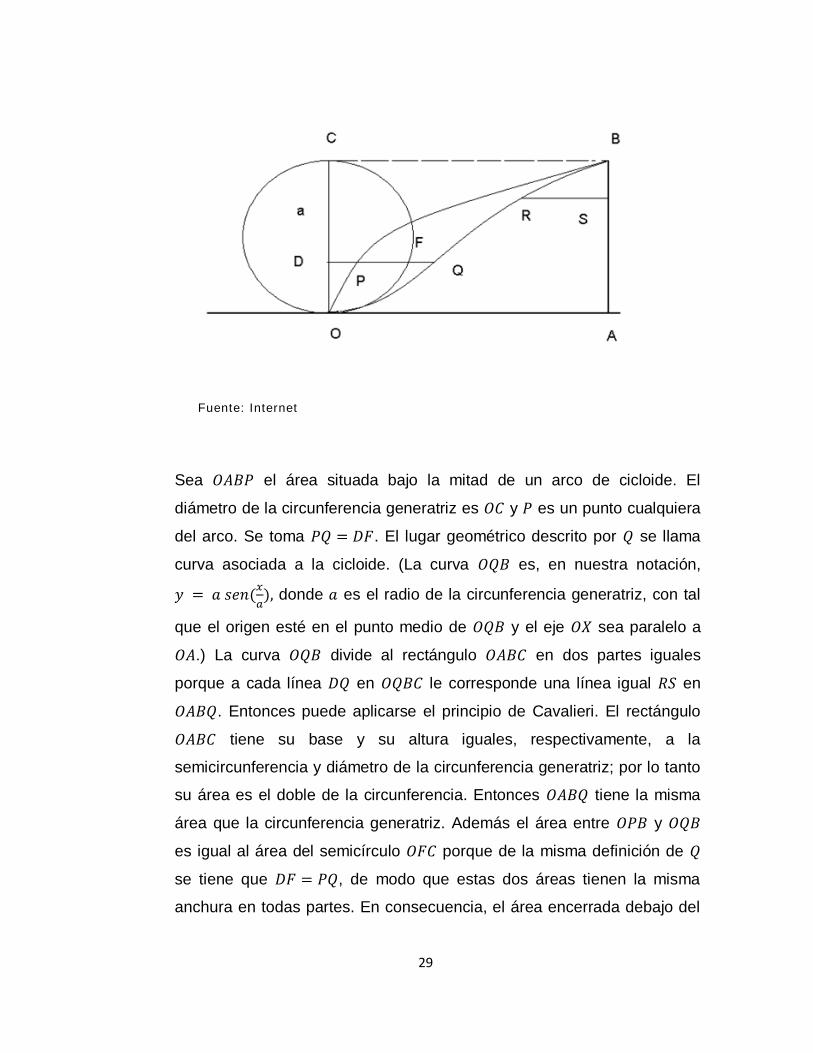
Sea 𝑂𝐴𝐵𝑃 el área situada bajo la mitad de un arco de cicloide. El
diámetro de la circunferencia generatriz es 𝑂𝐶 y 𝑃 es un punto cualquiera
del arco. Se toma 𝑃𝑄 = 𝐷𝐹. El lugar geométrico descrito por 𝑄 se llama
curva asociada a la cicloide. (La curva 𝑂𝑄𝐵 es, en nuestra notación,
𝑦 = 𝑎 𝑠𝑒𝑛(𝑥
𝑎), donde 𝑎 es el radio de la circunferencia generatriz, con tal
que el origen esté en el punto medio de 𝑂𝑄𝐵 y el eje 𝑂𝑋 sea paralelo a
𝑂𝐴.) La curva 𝑂𝑄𝐵 divide al rectángulo 𝑂𝐴𝐵𝐶 en dos partes iguales
porque a cada línea 𝐷𝑄 en 𝑂𝑄𝐵𝐶 le corresponde una línea igual 𝑅𝑆 en
𝑂𝐴𝐵𝑄. Entonces puede aplicarse el principio de Cavalieri. El rectángulo
𝑂𝐴𝐵𝐶 tiene su base y su altura iguales, respectivamente, a la
semicircunferencia y diámetro de la circunferencia generatriz; por lo tanto
su área es el doble de la circunferencia. Entonces 𝑂𝐴𝐵𝑄 tiene la misma
área que la circunferencia generatriz. Además el área entre 𝑂𝑃𝐵 y 𝑂𝑄𝐵
es igual al área del semicírculo 𝑂𝐹𝐶 porque de la misma definición de 𝑄
se tiene que 𝐷𝐹 = 𝑃𝑄, de modo que estas dos áreas tienen la misma
anchura en todas partes. En consecuencia, el área encerrada debajo del

30
semiarco es una vez y media el área de la circunferencia generatriz.
Además, también obtuvo el área encerrada en un arco de la curva seno,
el volumen generado por la revolución del arco alrededor de su base,
otros volúmenes conectados con la cicloide y el centro de su área.
(García, V., 2008).
El método más importante para calcular áreas, volúmenes y otras
cantidades comenzó con modificaciones del método exhaustivo griego.
Así como los griegos utilizaban diferentes tipos de figuras aproximantes
rectilíneas, en el siglo XVII adoptaron un procedimiento sistemático
utilizando rectángulos. Supongamos que se quiere calcular el área
situada por la parábola 𝑥2, desde 𝑥 = 0 hasta 𝑥 = 𝐵.
Fuente: Internet
Si dividimos el área bajo esa parábola en rectángulos de ancho 𝑑, a
medida que la anchura 𝑑 de estos rectángulos se hace más pequeña, la
suma de las áreas de los rectángulos se aproxima al área encerrada bajo
la curva. Esta suma, si las bases son todas ellas de anchura 𝑑, y si se
utiliza la propiedad característica de la parábola de que la ordenada es el
cuadrado de la abscisa, 𝑑 ∙ 𝑑2 + 𝑑(2𝑑)2 + 𝑑(3𝑑)2+. . . +𝑑(𝑛𝑑)2 lo que es
lo mismo, 𝑑3(12 + 22 + 32+. . . +𝑛2).

31
La suma de las potencias 𝑚-ésimas de los primeros 𝑛 números naturales
había sido obtenida por Pascal y Fermat precisamente para su uso en
tales problemas; por ello los matemáticos pudieron sustituir fácilmente la
última expresión por 𝑑3 (2𝑛3+3𝑛2+𝑛
6)
Si sustituimos 𝑑 por la longitud fija 𝑂𝐵 dividida por 𝑛, el resultado es
𝑂𝐵3 (1
3+
1
2𝑛+
1
6𝑛2).
Si se considera, como lo hicieron ellos entonces, que los dos últimos
términos se pueden despreciar cuando 𝑛 es infinita, se obtiene el
resultado correcto. El proceso de paso al límite no había sido introducido
todavía (o se percibía toscamente) y por lo tanto el despreciar términos
tales como los dos últimos no estaba justificado. Este enfoque que fue
mostrado por Stevin en 1586 en su obra “Statics” fue seguido por muchos
otros, incluyendo a Fermat, que ya antes de 1936 conocía
1
1
0
n
adxx
na
n , para todo 𝑛 racional excepto -1.
En 1658 Pascal considero algunos problemas sobre la cicloide. Calculo el
área de cualquier segmento de la curva cortada por una recta paralela a
la base, el centroide del segmento y los volúmenes de los sólidos
generados por esos segmentos al girar alrededor de sus bases o de una
recta vertical (el eje de simetría). (García, V., 2008).

32
Fuente: Internet
John Wallis (1616-1703) fue de los primeros en introducir métodos
analíticos en el cálculo, así en sus esfuerzos por calcular el área del
círculo, analíticamente obtuvo una nueva expresión de 𝜋. Calculó el área
acotada por los ejes, la ordenada en 𝑥 y la curva para las funciones
𝑦 = (1 − 𝑥2)𝑛, para 𝑛 = 1, 2, 3 … y obtuvo áreas
𝑥, 𝑥 −1
3𝑥3, 𝑥 −
2
3𝑥3 +
1
5𝑥5, 𝑥 −
3
3 𝑥3 +
3
5𝑥5 −
1
7𝑥7, ….,
respectivamente. Cuando 𝑥 = 1 estas áreas son
1,2
3,
8
15,
48
105, ….
Pero la circunferencia viene dada por 𝑦 = (1 − 𝑥2)12. Por inducción e
interpolación, Wallis calculó su área y, mediante complicados razonamientos
posteriores llegó a que
𝜋
2=
2∙2∙4∙4∙6∙6∙8∙8∙….
1∙3∙3∙5∙5∙7∙7∙9…

33
Fuente: Internet
Gregorio de San Vicent, en su obra “Opus Geometricum” (San Vicent, 1647),
proporcionó las bases para la importante conexión entre la hipérbola
rectangular y la función logaritmo. Demostró, utilizando el método exhaustivo,
que si para la curva 𝑦 =1
𝑥, las 𝑥𝑖 se eligen de modo que las áreas 𝑎, 𝑏, 𝑐, 𝑑 …
son iguales, entonces las 𝑦𝑖 están en progresión geométrica. Esto significa
que la suma de las áreas desde 𝑥0 hasta 𝑥𝑖, cuya suma forma una
progresión geométrica, es proporcional al logaritmo de los valores de las 𝑦𝑖
o, en nuestra notación,
∫𝑑𝑥
𝑥
𝑥
𝑥0
= 𝑘 ∙ log 𝑦
La observación de que las áreas pueden interpretarse como logaritmos
se debe en realidad a un discípulo de Gregorio, el jesuita belga Alfonso
de Sarasa (1618-1667) en sus “Solutio Problematis a Mercenno Propositi”
(de Sarasa, 1649).
En el último tercio del siglo XVII, Newton (en 1664 - 1666) y Leibniz (en
1675) inventaron el Cálculo de manera independiente:

34
Unificaron y resumieron en dos conceptos generales, el de integral y
derivada, la gran variedad de técnicas diversas y de problemas que se
abordaban con métodos particulares. Desarrollaron un simbolismo y unas
reglas formales de cálculo que podían aplicarse a funciones algebraicas y
trascendentes, independientes de cualquier significado geométrico, que
hacía casi automático, el uso de dichos conceptos generales
(García, V., 2008).
Reconocieron la relación inversa fundamental entre la derivación y la
integración. Newton llamó a nuestra derivada una fluxión (una razón de
cambio o flujo); Leibniz vio la derivada como una razón de diferencias
infinitesimales y la llamó el cociente diferencial. Newton hizo sus primeros
descubrimientos diez años antes que Leibniz quien, sin embargo, fue el
primero en publicar sus resultados (Hernández, M., 2014).
1.1.6. Integral definida e Integral de Riemann
Sea 𝑓 una función continua y definida para 𝑎 ≤ 𝑥 ≤ 𝑏, en la cual
dividimos el intervalo [𝑎, 𝑏] en n subintervalos de igual ancho ∆𝑥 = |𝑏−𝑎
𝑛|.
Sean 𝑥0 = 𝑎 y 𝑥𝑛 = 𝑏 y además 𝑥0, 𝑥1, 𝑥2, 𝑥3, … . . 𝑥𝑛 los puntos extremos
de cada subintervalo. Elegimos un punto 𝑡𝑖 en estos subintervalos de
modo tal que 𝑡𝑖 se encuentra en el 𝑖-ésimo subintervalo
𝑥𝑖−1, 𝑥𝑖 𝑐𝑜𝑛 𝑖 = 1, 2, 3, . . , 𝑛. Entonces se llama integral definida de 𝑓 de
𝑎 a 𝑏 al número ∫ 𝑓(𝑥)𝑑𝑥 = 𝑙𝑖𝑚𝑛→∞ ∑ 𝑓(𝑥𝑖𝑛1
𝑏
𝑎)∆𝑥.

35
Aunque esta definición básicamente tiene su motivación en el problema
de cálculo de áreas, se aplica para muchas otras situaciones. La
definición de la integral definida es válida aun cuando 𝑓(𝑥) tome valores
negativos (es decir cuando la gráfica se encuentre debajo del eje 𝑥). Sin
embargo, en este caso el número resultante no es el área entre la gráfica
y el eje 𝑥.
La suma ∑ 𝑓(𝑥𝑖)∆𝑥 𝑛1 que aparece en la definición de integral definida se
llama suma de Riemann en honor al matemático alemán Bernahrd
Riemann. Su definición incluía además subintervalos de distinta longitud.
Sea f una función definida en el intervalo cerrado [a, b] y sea una partición
arbitraria de dicho intervalo 𝑎 = 0 ≤ 𝑥1 ≤ 𝑥2 ≤ 𝑥3 … … . ≤ 𝑥𝑛−1 ≤ 𝑥𝑛 = 𝑏
donde ∆𝑥𝑖 indica la amplitud o longitud del 𝑖-ésimo subintervalo. Si 𝑥𝑖 es
cualquier punto del 𝑖-ésimo subintervalo, a la suma
∑ 𝑓(𝑥𝑖)∆𝑥 𝑛1 , 𝑥𝑖−1 ≤ 𝑥𝑖 ≤ 𝑥𝑛 se llama suma de Riemann de 𝑓 asociada a la
partición.
Si bien es cierto que la integral definida había sido definida y usada con
mucha anterioridad a los tiempos de Riemann, él generalizó el concepto
para poder incluir una clase de funciones más amplia. En la definición de
una suma de Riemann, la única restricción sobre la función 𝑓 es que esté
definida en el intervalo [𝑎, 𝑏]. (se suponía, anteriormente, que 𝑓 era no
negativa debido a que estábamos tratando con el área bajo una curva)
(marlhen.wordpress.com, pág. 2, 2010).

36
1.1.7. Integrales impropias
Para definir la integral de Riemann de una cierta función 𝑓(𝑥) en un
intervalo [𝑎, 𝑏], se necesita que el intervalo de integración sea cerrado y
acotado y que la función esté acotada dentro del intervalo. Cuando una
de estas dos condiciones no se cumple, se define la integral impropia
como una generalización de la integral de Riemann. “Este concepto, de
múltiples aplicaciones (probabilidades, normas funcionales,
transformadas de Fourier,…), ofrece una gran resistencia a los
estudiantes universitarios, que lo aprenden sin darle significado y
restringiéndose a cálculos algebraicos y a la aplicación de criterios de
convergencia” (González-Martín, 2002).
“Las integrales impropias son una clase especial de integrales definidas
(integrales de Riemann) en las cuales el intervalo de integración o
la función en el integrando o ambos presentan ciertas características
especiales” (Navas, P., 2009).
Las integrales impropias no son realmente una nueva forma de integrales,
sino una extensión natural a las propiedades de la integral y un
replanteamiento del concepto de área bajo la curva.
Normalmente las integrales que se han analizado tienen ambos límites de
integración finitos (integral de Riemann), y la función que se integra es
continua en el intervalo de integración.
Los casos de integrales impropias son justamente donde uno o ambos
límites de integración son infinitos o donde el integrando es discontinuo
en un número finito de puntos del intervalo de integración.

37
1.2. Marco Socio – Cultural
La presente investigación va dirigida a estudiantes de ingeniería que
cursan las asignaturas Ecuaciones Diferenciales y Método Matemático de
la Cátedra de Análisis Matemático de la Universidad APEC, para que
sirva como parte del material didáctico y/o de consulta tanto para estos,
así como para el cuerpo docente de esta Cátedra. Con esta investigación
se busca desarrollar habilidades, en los futuros profesionales de la
ingeniería, como es la capacidad de análisis e interpretación de
situaciones problémicas aplicando las funciones Gamma (𝛤) y Beta (𝛽).
1.3. Marco Teórico
Sobre esta investigación podemos decir que existen muy pocas fuentes
bibliográficas, para lo mucho que se pudiera investigar y presentar sobre
las funciones Gamma (𝛤) y Beta (𝛽). Pero, independientemente de las
pocas informaciones disponibles, existen algunos materiales que han
servido de orientación y marco teórico de esta investigación.
Algunas de estas investigaciones solo dirigen su enfoque investigativo
hacia la función Gamma, limitando así el alcance de las funciones
Eulerianas.
Uno de estos trabajos es la tesis de grado “Sobre la función Gamma(𝛤)”
(Vásquez, L., 1999), cuya investigación está enfocado hacia el plano
complejo. Este trabajo define, describe y relaciona la función Gamma con
el factorial de un número.

38
Un trabajo muy limitado es “Las funciones Gamma y Beta” (Villalobos), el
cual solo muestra el concepto de función Gamma y Beta, sus
propiedades y la relación entre estas.
Otro trabajo de investigación es la tesis doctoral “Funciones especiales y
ecuaciones diferenciales matriciales” (Cortés. J. C., 1997). Esta tesis solo
le dedica un capítulo a estas funciones Eulerianas, para mostrar su
definición y propiedades, pero desde el punto de vista matricial.
Se le agrega otro trabajo “La función Gama” (Rivaud, J.J., 2004). Este
material de poca extensión, pero muy bien logrado, nos muestra distintas
definiciones de la función Gamma, presentadas por Euler, Gauss,
Weierstras, Stirling, Hankel, etc. Además la función Gamma como un
producto infinito, así como la derivada y la derivada logarítmica de la
función Gamma. También trata brevemente la función Beta y la función
Zeta de Riemann.
Se pudo hallar otro trabajo relativo a estas funciones, “Ecuaciones
Diferenciales de Orden Superior” (Abascal, R., 2006). Este muestra las
funciones Gamma como el factorial de un número, además nos muestra
la relación de las funciones Gamma y Beta y la integral de Wallis.

39
1.4. Marco Conceptual
1.4.1. Función
Una función es la expresión de la relación de dependencia entre dos
variables que, por medio de una regla, asigna a cada valor de la variable
independiente 𝑥 un único valor de la variable dependiente 𝑦. Se expresa
mediante la fórmula abstracta:
𝑦 = 𝑓(𝑥) que se lee "𝑦 es función de 𝑥"
Donde {
𝑥 𝑒𝑠 𝑙𝑎 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑖𝑛𝑑𝑒𝑝𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒𝑦 𝑒𝑠 𝑙𝑎 𝑣𝑎𝑟𝑖𝑎𝑏𝑙𝑒 𝑑𝑒𝑝𝑒𝑛𝑑𝑖𝑒𝑛𝑡𝑒 𝑓 𝑒𝑠 𝑙𝑎 𝑓𝑢𝑛𝑐𝑖𝑜𝑛
La gráfica de una función es el dibujo, sobre unos ejes coordenados, de
todos los pares (𝑥, 𝑓(𝑥)) donde 𝑥 recorre todos los valores del dominio de
la función. Como ya quedó claro 𝑦 = 𝑓(𝑥), así que la segunda
coordenada 𝑦 de cada uno de estos puntos no es más que la
correspondiente imagen de la primera coordenada 𝑥.
La gráfica de una función 𝑓(𝑥) es el dibujo de {(𝑥, 𝑓(𝑥))/ 𝑥 ∈
𝐷𝑜𝑚𝑖𝑛𝑖𝑜 𝑓}. Sobre el eje 𝑂𝑋 representamos los valores de la variable
independiente 𝑥 y sobre el eje 𝑂𝑌 los valores de 𝑓(𝑥) = 𝑦 que es la
variable dependiente.

40
Tipos de funciones
a) Función sobreyectiva (suprayectiva)
En aquella en la que todo elemento del Codominio o conjunto de imagen
le corresponde cuando menos un elemento del Dominio.
Ejemplo No. 1: Ejemplo No. 2:
Fuente: Internet Fuente: Internet
Ejemplo No. 3:
Fuente: Internet

41
b) Función Inyectiva (uno a uno):
Es aquella en la que a elementos distintos del Dominio le corresponden
elementos distintos del Codominio o conjunto de imagen.
Prueba de la recta horizontal: puesto que a cada elemento distinto del
Dominio de una función debe de corresponder un elemento distinto del
Codominio, ninguna recta horizontal puede cortar la gráfica cartesiana de
una función Inyectiva en más de un punto.
Ejemplo No. 1: Ejemplo No. 2:
Fuente: Internet Fuente: Internet
Ejemplo No. 3:
Fuente: Internet

42
c) Función Biyectiva:
Es aquella función que es Inyectiva y sobreyectiva a la vez, es decir, si
cada elemento del Dominio está relacionado con un elemento distinto del
conjunto de imagen, y los elementos del conjunto de imagen están
relacionados con un elemento del Dominio.
Ejemplo No. 1: Ejemplo No. 2:
Fuente: Internet Fuente: Internet
Las funciones se pueden clasificar de diferentes maneras, según el tipo
de operaciones que se tienen que realizar para obtener sus valores, entre
las más comunes están las Algebraicas y las Trascendentes.
Las funciones algebraicas se refieren a aquellas cuya regla de
correspondencia puede ser expresada por medio de un polinomio una
expresión racional (cociente de dos polinomios) o una expresión irracional
(forma radical).

43
Ejemplos:
Fuente: Internet
Las funciones trascendentales se refieren a las funciones cuya regla de
correspondencia no es algebraica como las funciones trigonométricas,
las funciones exponenciales y logarítmicas.
Ejemplo:
Gráfica de 𝑓(𝑥) = (3
5)
𝑥
Dominio = (−∞, ∞)
Fuente: Internet

44
La gráfica pasa por el punto (0,1) como se observa si miramos el plano
coordenado, luego: si 𝑥 = 0, 𝑓(0) = 1, ya que 𝑓(0) = (3
5)
0
= 1
También se ve que pasa por (1,3
5) ya que 𝑓(1) = (
3
5 )
1
=3
5.
Una de las funciones más importantes en el mundo de las matemáticas
es la función exponencial de base el número 𝑒, donde 𝑒 ≈ 2.718281 … …
𝑦 = 𝑒𝑥, positiva y creciente según el resumen de propiedades descrito
anteriormente y cuyo gráfico es
Fuente: Internet
1.4.2. Límite de una función
Sea 𝑓 una función y a un número real, el número 𝐿 es el límite de la
función 𝑓 en el punto 𝑎, y se escribe 𝑙𝑖𝑚𝑥→𝑎 𝑓(𝑥) = 𝐿 (se lee límite de 𝑓(𝑥)
cuando 𝑥 tiende a 𝑎 es 𝐿), si cuando 𝑥 tiende a 𝑎, siendo distinto de 𝑎,
sus imágenes 𝑓(𝑥), tienden a 𝐿 (Ferrante, J.J.L., 2009).
𝑙𝑖𝑚𝑎→𝑏 𝑓(𝑥) = 𝐿 ↔ Si ∀휀 > 0, ∃𝛿 > 0/∀𝑥 ∈ ℝ en el dominio de la función
0 < |𝑥 − 𝑎| < 𝛿 → |𝑓(𝑥) − 𝐿| < 휀

45
Fuente: Internet
1.4.3. La derivada de una función
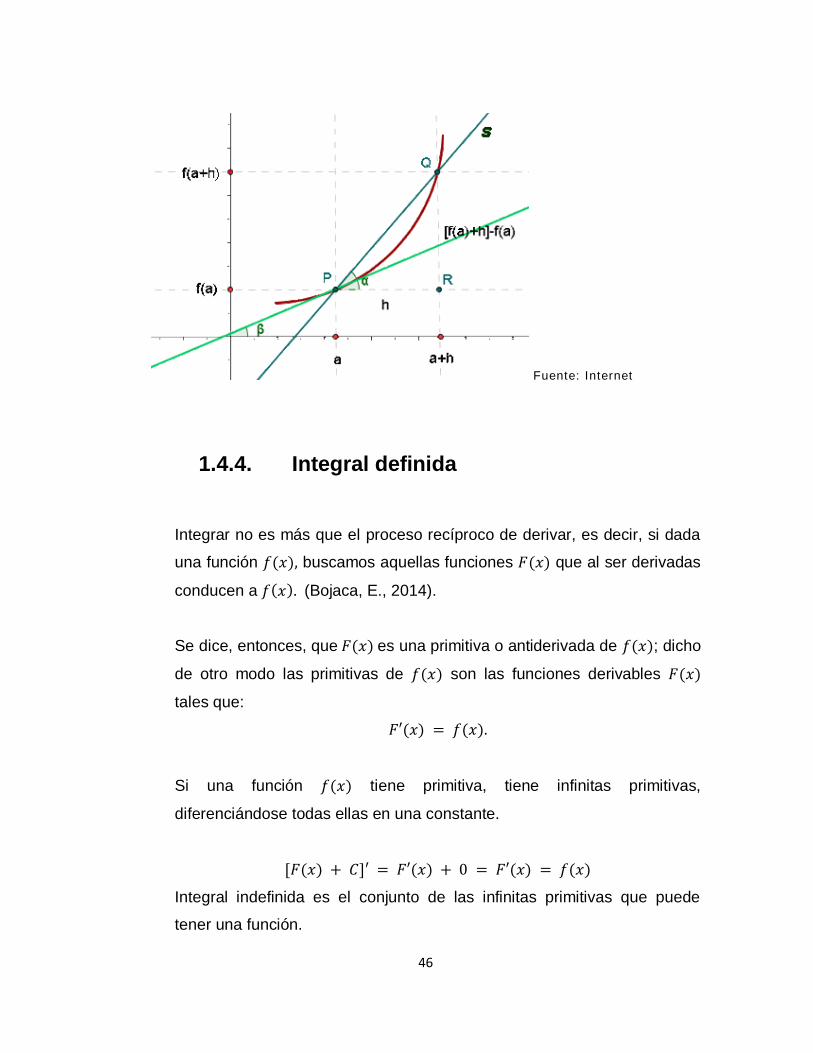
“La derivada de una función 𝑓(𝑥) en el punto 𝑥 = 𝑎 es el valor del límite,
si existe, de un cociente incremental cuando el incremento de la variable
tiende a cero” (Vitutor).
𝑓′(𝑎) = limℎ→0
∆𝑦
ℎ= lim
ℎ→0
𝑓(𝑎 + ℎ) − 𝑓(𝑎)
ℎ
46
Fuente: Internet
1.4.4. Integral definida
Integrar no es más que el proceso recíproco de derivar, es decir, si dada
una función 𝑓(𝑥), buscamos aquellas funciones 𝐹(𝑥) que al ser derivadas
conducen a 𝑓(𝑥). (Bojaca, E., 2014).
Se dice, entonces, que 𝐹(𝑥) es una primitiva o antiderivada de 𝑓(𝑥); dicho
de otro modo las primitivas de 𝑓(𝑥) son las funciones derivables 𝐹(𝑥)
tales que:
𝐹′(𝑥) = 𝑓(𝑥).
Si una función 𝑓(𝑥) tiene primitiva, tiene infinitas primitivas,
diferenciándose todas ellas en una constante.
[𝐹(𝑥) + 𝐶]′ = 𝐹′(𝑥) + 0 = 𝐹′(𝑥) = 𝑓(𝑥)
Integral indefinida es el conjunto de las infinitas primitivas que puede
tener una función.

47
Se representa por ∫ 𝑓(𝑥) 𝑑𝑥.
Ahora, sea 𝑓 una función continua y definida para 𝑎 ≤ 𝑥 ≤ 𝑏, en la cual
dividimos el intervalo [𝑎, 𝑏] en n subintervalos de igual ancho ∆𝑥 = |𝑏−𝑎
𝑛|
Entonces se llama integral definida de 𝑓 de 𝑎 a 𝑏 al número
∫ 𝑓(𝑥)𝑑𝑥 = 𝑙𝑖𝑚𝑛→∞ ∑ 𝑓(𝑥𝑖𝑛1
𝑏
𝑎)∆𝑥
Fuente: www.zweigmedia.com
1.4.5. Integrales impropias
Las integrales impropias son una clase especial de integrales definidas
(integrales de Riemann) en las cuales uno o ambos límites de integración
son infinitos o donde el integrando es discontinuo en un número finito de
puntos del intervalo de integración.
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎, Es impropia si se presenta uno de los siguientes casos:
𝑎 = −∞ 𝑜 𝑏 = ∞ 𝑜 𝑎 = −∞ 𝑦 𝑏 = ∞

48
𝑓(𝑥) no es acotada en alguno de los puntos de [𝑎, 𝑏]. Dichos puntos se
llaman singularidades de 𝑓(𝑥).
Existes diversos tipos de integrales impropias, por lo que a continuación
procederemos a definirlas:
Definición No. 1
a) Si 𝑓 es continua ∀𝑥 ≥ 𝑎, entonces ∫ 𝑓(𝑥)𝑑𝑥∞
𝑎= lim𝑏→∞ ∫ 𝑓(𝑥)𝑑𝑥
𝑏
𝑎, si el
límite existe.
b) Si 𝑓 es continua ∀𝑥 ≤ 𝑏, entonces ∫ 𝑓(𝑥)𝑑𝑥𝑏
−∞= 𝑙𝑖𝑚𝑎→−∞ ∫ 𝑓(𝑥)𝑑𝑥
𝑏
𝑎, si
el límite existe.

49
Definición No. 2
Si 𝑓 es continua ∀𝑥 ∈ ℝ, 𝑦 𝑐 ∈ ℝ; entonces
∫ 𝑓(𝑥)𝑑𝑥∞
−∞= 𝑙𝑖𝑚𝑎→−∞ ∫ 𝑓(𝑥)𝑑𝑥 + 𝑙𝑖𝑚𝑏→∞ ∫ 𝑓(𝑥)𝑑𝑥
𝑏
𝑐
𝑐
𝑎,
Definición No. 3
a) Si 𝑓 es continua ∀𝑥 ∈ (𝑎, 𝑏], y 𝑙𝑖𝑚𝑥→𝑎+ 𝑓(𝑥) = ∞, entonces
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= 𝑙𝑖𝑚𝑡→𝑎+ ∫ 𝑓(𝑥)𝑑𝑥
𝑏
𝑡, si el límite existe.
b) Si f es continua ∀𝑥 ∈ [𝑎, 𝑏) y 𝑙𝑖𝑚𝑥→𝑏− 𝑓(𝑥) = ∞, entonces
∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= lim𝑡→𝑏− ∫ 𝑓(𝑥)𝑑𝑥
𝑡
𝑎, si el límite existe.
Definición No. 4
Si 𝑓 es continua en todo número de [𝑎, 𝑏], excepto en 𝑐 y 𝑎 < 𝑐 < 𝑏, y si
además 𝑙𝑖𝑚𝑥→𝑐 𝑓(𝑥) = ∞, entonces ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎= 𝑙𝑖𝑚𝑡→𝑐− ∫ 𝑓(𝑥)𝑑𝑥 +
𝑡
𝑎
𝑙𝑖𝑚𝑠→𝑐+ ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑠, si los límites del miembro derecho existen (Navas, P.,
2009).

50
1.4.6. Integrales Impropias Especiales
Existen algunos tipos de integrales impropias que llamaremos especiales.
Primero clasifiquemos las integrales en 3 tipos:
1.4.6.1. Primera especie
Son del tipo: ∫ 𝑓(𝑥)𝑑𝑥∞
𝑎 o ∫ 𝑓(𝑥)𝑑𝑥
𝑏
−∞ , estas presentan una asíntota
horizontal.
1.4.6.2. Segunda especie
Son del tipo: ∫ 𝑓(𝑥)𝑑𝑥𝑏
𝑎 y la función 𝑓(𝑥) no está definida en el intervalo
de integración o en cualquier punto del dominio o los extremos de
integración. Y estas presentan una asíntota vertical.
1.4.6.3. Tercera especie
Son mezclas de los dos tipos anteriores, es decir, que presentan un
infinito en los extremos de integración y la función se hace infinito en uno
o más puntos del intervalo de integración.
Este tipo de integrales impropias se pueden dividir en suma de dos
integrales: una de primera especie y otra de segunda especie. Por lo
tanto deberemos seguir los pasos anteriores para determinar su carácter,
y tener en cuenta que para que sea convergente tanto la integral de
primera especie como la de segunda especie tienen que ser
convergentes, si no, en cualquier otro caso, diverge. (Hidalgo, A., 25
mayo 2012).

51
El concepto de integral impropia permite también aplicarlo al cálculo de
áreas y volúmenes de regiones no acotadas.
1.5. Marco Metodológico
1.5.1. Tipos de investigación
Esta investigación estará basada en el método deductivo, el cual consiste
en un proceso de conocimiento que se inicia con el propósito de señalar
las verdades particulares contenidas explícitamente en la situación
general.

52
CAPITULO II: Funciones Gamma y Beta
2.1 Funciones Gamma (𝚪)
La función Gamma aparece en el año 1729 en algunos trabajos de
Leonhard Euler, la cual es el resultado de varios estudios relativos a
interpolación de varios matemáticos del siglo XVII y a los estudios sobre
las integrales que se venían desarrollando hacía ya un tiempo. Algunos
matemáticos importantes de la época, como Daniel Bernoulli, Christian
Goldbach y James Stirling, habían estado dedicados a la investigación de
obtener una expresión analítica que se comportara como el factorial de un
número entero positivo y fijara, adecuadamente, el sentido para los
demás valores de la variable, pero no lo lograron. Más tarde, este
problema fue propuesto a Euler, quien finalmente, obtuvo la solución
(Vásquez, L., 1999).
¿Cuál fue el problema de interpolación?
Tenemos la sucesión: 1, 1 ∙ 2, 1 ∙ 2 ∙ 3, 1 ∙ 2 ∙ 3 ∙ 4, …. Esta es la sucesión de
factoriales. Los factoriales se abrevian usualmente como 1!, 2!, 3!, 4!. . . .. y
los primeros cinco son 1, 2, 6, 24, 120 …. ellos crecen en tamaño
rápidamente. El numero 100! Tiene 158 dígitos. Conociendo esto, ¿es
fácil computar una fórmula para los factoriales? ¿Es posible la
interpolación entre los factoriales? ¿Qué será 521?
El factorial
𝑛: 1 2 3 4 5 521 6 7 8 ….
𝑛! : 1 2 6 24 120 ? 720 5040 40320 …

53
Pregunta: ¿Qué número se debe insertar en la línea inferior que
corresponda a un número de la línea superior que este en la mitad de 5 y
6?
Respuesta de Euler: 287.8852…….
Respuesta de Hadamard: 280.3002…….
Este es el problema de interpolación el cual lleva a la función Gamma. El
problema de interpolación de Stirling, de Bernoulli y de Goldbach.
En la solución de la interpolación factorial se requiere procesos infinitos.
Euler halla una función relativamente simple para la cual el factorial de los
enteros 1, 2, 3,…. Toma valores 1, 2, 6,….ahora una función como la que
el buscaba tenía que ser una expresión analítica la cual debería fijar el
sentido de los otros valores de la variable y cumplir el factorial para
enteros positivos. Aparentemente Euler experimento con productos
infinitos de números. Notando que si 𝑛 es un entero positivo
[(2
1)
𝑛 1
𝑛 + 1] [(
3
2)
𝑛 2
𝑛 + 2] [(
4
3)
𝑛 3
𝑛 + 3] … . . = 𝑛!
Dejando de lado todas las preguntas delicadas como la convergencia de
productos infinitos, esta ecuación se puede verificar cancelando todos los
factores comunes que aparecen en el numerador y el denominador en el
lado izquierdo. Más aun, el lado izquierdo está definido para todos los
valores de n diferentes de enteros negativos. Euler noto también que
cuando el valor de 𝑛 =1
2 es insertado en el lado izquierdo del famoso
producto infinito del inglés John Wallis (1616 – 1703), este seguía
cumpliendo (después de una gran manipulación) (Vásquez, L.,1999).

54
(1 ∙ 3
2 ∙ 3) (
4 ∙ 4
3 ∙ 5) (
6 ∙ 6
5 ∙ 7) (
8 ∙ 8
7 ∙ 9) ∙∙∙∙∙∙∙=
𝜋
2
Con este descubrimiento de Euler tendría sosiego. Su problema había
sido resuelto.
Euler fue más allá y observo que su producto, para algunos valores de 𝑛
enteros, producía valores enteros y para otros valores como 𝑛 =1
2 se
producía una expresión que involucraba a 𝜋. Ahora 𝜋 representaba
círculos y sus áreas, y áreas significaban integrales, y él estaba
familiarizado con integrales que exhibían el mismo fenómeno; por lo que
tomo la integral
∫ 𝑥𝑒1
0
(1 − 𝑥)𝑛𝑑𝑥
Un caso especial de esta integral había sido estudiado por Wallis, Newton
y Stirling. Esta integral fue difícil de manipular, puesto que en el caso
indefinido no siempre es una función elemental de 𝑥. Asumiendo que 𝑛 es
un entero y 𝑒 es valor arbitrario, Euler expandió (1 − 𝑥)𝑛, por el Teorema
del Binomio, y hayo sin dificultad que
∫ 𝑥𝑒1
0
(1 − 𝑥)𝑛𝑑𝑥 =1 ∙ 2 ∙ 3 ∙ 4 ⋯ 𝑛
(𝑒 + 1)(𝑒 + 2)(𝑒 + 3) … (𝑒 + 𝑛 + 1)
La idea ahora era aislar 1 ∙ 2 ∙ 3 ∙ 4 ⋯ 𝑛 del denominador; así tendría una
expresión para 𝑛! Como una integral.
Haciendo varias sustituciones concluyo que
𝑛! = ∫ (−𝑙𝑜𝑔𝑥)𝑛1
0
𝑑𝑥

55
Obteniendo así una expresión para 𝑛!, donde valores distintos de enteros
positivos pueden ser sustituidos (Vásquez, L., 1999).
A partir de ese momento la función Gamma ha venido creciendo, tanto en
su concepto como en su contenido. Este crecimiento ha sido tan notorio
que ha aparecido en la solución de diferentes problemas teóricos
matemáticos, en problemas de la teoría atómica y nuclear, que le han
permitido desarrollarse computacionalmente (Vásquez, L., 1999).
La función Gamma extiende el concepto de factorial a los números
complejos, haciendo excepción a los enteros negativos y al cero. Por lo
tanto la función Gamma generaliza el factorial para cualquier valor
complejo de 𝑛 . Además, la función Gamma es aplicada con rigor
científico a los métodos probabilísticos de los problemas de fallos en
procesos industriales y en la predicción de parámetros, como es el caso,
de la distribución de weibull (Ramírez, K. 2009).
Una de las herramientas de gran uso en la solución de ecuaciones
diferenciales ordinarias y parciales es la transformada de Laplace de una
función 𝑓(𝑥), definida para 𝑥 > 0 y denotada por ℒ(𝑓 (𝑥)). Está definida
por
ℒ[𝑓 (𝑥)] (𝑠) = ∫ 𝑒−𝑠𝑥𝑓(𝑥)𝑑𝑥∞
0
Y tiene sentido para toda 𝑠 en la que la integral existe.
Es sabido que uno de los primeros problemas que se consideran es el
cálculo de transformadas de funciones sencillas, como es el caso 𝑥𝑛−1
(la elección del coeficiente 𝑛 − 1 es para simplificar la notación),

56
ℒ[𝑓 (𝑥)](𝑠) = ∫ 𝑒−𝑠𝑥𝑥𝑛−1𝑑𝑥∞
0 para 𝑛 > 1
Si aplicamos el cambio de variable 𝑠𝑥 = 𝑡, obtenemos la siguiente
expresión
ℒ[𝑓 (𝑥)] (𝑠) =1
𝑠𝑛 ∫ 𝑒−𝑡𝑥𝑛−1𝑑𝑡∞
0
De la expresión anterior podemos deducir la siguiente expresión
ℒ[𝑥𝑛−1)] (𝑠) =𝑘𝑛
𝑠𝑛 Teniendo así determinada la transformada, modulo
la constante 𝑘(𝑛), la cual sólo depende de 𝑛 y que está dada por
𝑘(𝑛) = ∫ 𝑒−𝑡𝑥𝑛−1𝑑𝑡∞
0 para 𝑛 > 0.
Esta misma integral aparece con frecuencia en la solución de diversos
problemas, y en muchos casos nos interesa su valor para 𝑛 no es un
número natural (un buen ejemplo de ello es precisamente el de la
transformada de Laplace de 𝑥𝑛−1, en la cual 𝑛 puede ser cualquier
número real mayor que cero). Dicha integral es lo que se conoce como
Integral de Euler de segunda especie, o función Gamma (𝛤).
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0𝑑𝑡 para 𝑛 > 0.
En la cual la condición 𝑛 > 0 es exigida para la convergencia de la
integral. La notación de la función Gamma fue ideada por Adrien-Marie
Legendre.

57
La función Gamma aparece en varias funciones de distribución de
probabilidad, por lo que es bastante usada tanto en probabilidad y
estadística como en combinatoria.
La función Gamma, como el factorial de un número, son en última
instancia el producto de sucesiones de números. Sin embargo, solamente
son comparables entre sí cuando se trata del factorial de un número
entero positivo.

58
Gráfico 3-D de la función Gamma. Fuente: Internet
2.2 Funciones Beta (𝜷)
La integral de Euler de primera especie o Función Beta no es menos
importante y también se define mediante otra integral impropia que
depende de dos parámetros 𝑛 > 0 y 𝑟 > 0, es decir, la Función Beta
𝛽(𝑛, 𝑟) converge cuando 𝑛 > 0 y 𝑟 > 0, la cual está definida por
𝛽(𝑛, 𝑟) = ∫ 𝑥𝑛−11
0(1 − 𝑥)𝑟−1𝑑𝑥.
Una propiedad importante de la función Beta es que
a) La función Beta 𝛽(𝑛, 𝑟) converge cuando 𝑛 > 0 y 𝑟 > 0
b) 𝛽(𝑛, 𝑟) = 𝛽(𝑟, 𝑛)
c) 𝛽(𝑛, 𝑟) = 2 ∫ sin2𝑛−1 𝜃 cos2𝑟−1 𝜃𝜋
20
𝑑𝜃
d) 𝛽(𝑛, 𝑟) =𝛤(𝑛)𝛤(𝑟)
𝛤(𝑛+𝑟).

59
2.3 Relación entre las Funciones Gamma (𝚪) y Beta (𝜷)
A continuación veremos como la siguiente identidad revela una estrecha
relación entre ambas integrales eulerianas. Es decir, la función Beta está
relacionada con la función Gamma de la siguiente manera
𝛽(𝑛, 𝑟) =𝛤(𝑛)𝛤(𝑟)
𝛤(𝑛+𝑟).
Si realizamos el cambio de variable 𝑥 = 𝑠𝑖𝑛 𝜃 en la función Beta se
obtiene una expresión alternativa para la función beta.
𝛽(𝑛, 𝑟) = 2 ∫ sin2𝑛−1 𝜃 cos2𝑟−1 𝜃𝜋
20
𝑑𝜃.
Si particularizamos esta expresión para valores de 𝑛 =1
2 y 𝑟 =
1
2 se
obtiene
𝛽 (1
2,1
2) = 2 ∫ sin2(
12
)−1 𝜃 cos2(12
)−1 𝜃
𝜋2
0
𝑑𝜃 = 2 ∫ sin0 𝜃 cos0 𝜃𝑑𝜃 = 2 ∫ 𝑑𝜃
𝜋2
0
𝜋2
0
𝛽 (1
2,
1
2) = 2𝜃|0
𝜋 2⁄= 2 (
𝜋
2) − 2(0) = 𝜋.
Al combinar el resultado obtenido en la expresión que relaciona las dos
funciones Gamma y Beta, se obtiene que
𝛽 (1
2,1
2) =
𝛤(12
)𝛤(12
)
𝛤(12 +
12)
𝜋 =𝛤(
12)𝛤(
12)
𝛤(1)
Como 𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0𝑑𝑡, entonces 𝛤(1) = ∫ 𝑒−𝑡𝑡1−1∞
0𝑑𝑡 = ∫ 𝑒−𝑡𝑡0∞
0𝑑𝑡

60
𝛤(1) = ∫ 𝑒−𝑡∞
0
𝑑𝑡 = −𝑒−𝑡|0∞ =
−1
𝑒𝑡|
0
∞
=1
𝑒0−
1
𝑒∞= 1 − 0 = 1
Ahora si sustituimos ese valor en la expresión anterior tenemos que
𝜋 = 𝛤(1
2)𝛤(
1
2)
Y como 𝛤 (1
2) 𝛤 (
1
2) = 𝛤2 (
1
2), por lo que 𝜋 = 𝛤2 (
1
2), entonces finalmente se
puede concluir que
𝛤 (1
2) = √𝜋.
Es posible establecer, como veremos a continuación, una ecuación de
recurrencia que permite calcular la función 𝛤(𝑛 + 1) a partir del momento
en que conocemos 𝛤(𝑛). Claro está, reemplazando el número 𝑛 por 𝑛 + 1,
podemos reescribir la función Gamma de la siguiente manera
𝛤(𝑛 + 1) = ∫ 𝑒−𝑡𝑡𝑛+1−1∞
0𝑑𝑡 = ∫ 𝑒−𝑡𝑡𝑛∞
0𝑑𝑡.
Aplicando integración por partes, es decir, aplicando la ecuación
∫ 𝑢𝑑𝑣 = 𝑢𝑣 − ∫ 𝑣𝑑𝑢
Haciendo un cambio de variables
𝑢 = 𝑡𝑛 → 𝑑𝑢 = 𝑛𝑡𝑛−1 𝑑𝑡
𝑑𝑣 = 𝑒−𝑡𝑑𝑡 → 𝑣 = −𝑒−𝑡
Ahora sustituyendo estas nuevas variables en nuestra función 𝛤(𝑛 + 1)
se obtiene que 𝛤(𝑛 + 1) = ∫ 𝑒−𝑡𝑡𝑛∞
0𝑑𝑡 = −𝑒−𝑡𝑡𝑛|0
∞ − ∫ −𝑒−𝑡∞
0𝑛𝑡𝑛−1𝑑𝑡

61
𝛤(𝑛 + 1) = (𝑡0
𝑒0−
𝑡∞
𝑒∞) + 𝑛 ∫ 𝑒−𝑡
∞
0
𝑡𝑛−1𝑑𝑡 = 0 + 𝑛 ∫ 𝑒−𝑡∞
0
𝑡𝑛−1𝑑𝑡 = 𝑛𝛤(𝑛)
𝛤(𝑛 + 1) = 𝑛𝛤(𝑛)
Si aplicamos este resultado en forma reiterada a partir de 𝛤(1) = 1,
estaremos en condiciones de calcular el valor de Γ(𝑛) para cualquier
número natural 𝑛.
Veamos:
𝛤(2) = 1 ∙ 𝛤(1) = (1)(1) = 1
𝛤(3) = 2 ∙ 𝛤(2) = (2)(1) = 2 = 2!
𝛤(4) = 3 ∙ 𝛤(3) = (3)(2!) = (3)(2)(1) = 6 = 3!
𝛤(5) = 4 ∙ 𝛤(4) = (4)(3!) = (4)(3)(2)(1) = 24 = 4!
𝛤(6) = 5 ∙ 𝛤(5) = (5)(4!) = (5)(4)(3)(2)(1) = 120 = 5!
.
.
.
𝛤(𝑛) = (𝑛 − 1) ∙ 𝛤(𝑛 − 1) = (𝑛 − 1)(𝑛 − 2)(𝑛 − 3) ⋯ (5)(4)(3)(2)(1)
= (𝑛 − 1)!
𝛤(𝑛 + 1) = 𝑛 ∙ 𝛤(𝑛) = 𝑛(𝑛 − 1)(𝑛 − 2)(𝑛 − 3) ⋯ (5)(4)(3)(2)(1) = 𝑛!
Si 𝑛 es un entero positivo, entonces 𝛤(𝑛) = (𝑛 − 1)! y 𝛤(𝑛 + 1) = 𝑛! lo
que nos muestra la relación de esta función con el factorial. De hecho, la
función Gamma generaliza el factorial para cualquier valor complejo de n.

62
2.4 Extensión del concepto de Función Factorial a los
números reales no naturales
La función Gamma, como el factorial de un número, son en última
instancia el producto de sucesiones de números. Sin embargo, solamente
son comparables entre sí cuando se trata del factorial de un número
entero positivo.
Si por algún procedimiento adecuado podemos llegar a determinar la
función 𝛤 (3
2), también podremos calcular en forma directa, las sucesivas
funciones gamma cuyo argumento difiere del de la anterior en una
unidad, veamos:
Como ya se demostró anteriormente que 𝛤 (1
2) = √𝜋 y utilizando la
expresión 𝛤(𝑛) = (𝑛 − 1)!, se demuestra que
𝛤 (3
2) = (
1
2) ∙ 𝛤 (
1
2) = (
1
2) ∙ √𝜋 =
√𝜋
2
𝛤 (5
2) = (
3
2) ∙ 𝛤 (
3
2) = (
3
2) (
√𝜋
2) =
3√𝜋
4
𝛤 (7
2) = (
5
2) ∙ 𝛤 (
5
2) = (
5
2) (
3√𝜋
4) =
15√𝜋
8
𝛤 (9
2) = (
7
2) ∙ 𝛤 (
7
2) = (
7
2) (
15√𝜋
8) =
105√𝜋
16
𝛤 (11
2) = (
9
2) ∙ 𝛤 (
9
2) = (
9
2) (
105√𝜋
16) =
945√𝜋
32
Y así sucesivamente.

63
En caso de utilizar la función gamma para los números fraccionarios
negativos, es posible calcular su valor a partir de la expresión
𝛤(𝑛) =𝛤(𝑛+1)
𝑛.
Probemos con algunos números fraccionarios negativos:
𝛤 (−1
2) =
𝛤(−1
2+1)
−1
2
=𝛤(
1
2)
−1
2
= (−2)𝛤 (1
2) = −2√𝜋
𝛤 (−3
2) =
𝛤(−3
2+1)
−3
2
=𝛤(−
1
2)
−3
2
= (−2
3) 𝛤 (−
1
2) = (−
2
3) (−2√𝜋) =
4√𝜋
3
𝛤 (−5
2) =
𝛤(−52+1)
−52
=𝛤(−
32
)
−52
= (− 2
5) 𝛤 (− 3
2) = (− 2
5) (
4√𝜋
3) = − 8√𝜋
15
Y así sucesivamente.
Existen tablas calculadas para otros valores entre 0 y 1. A partir de las
mismas se puede obtener el valor de 𝛤 para cualquier valor fraccionario
que difiera de aquellos en una unidad o un número entero de unidades,
como hemos hecho hasta aquí. Esto equivale a decir que es posible
calcular 𝛤 para cualquier número real, con excepción de cero y de los
números enteros negativos, para los cuales no existe la función Gamma.

64
2.5 Extensión del dominio de la Función Gamma (𝚪) de cero
y de los números enteros negativos
Si aplicamos aquí también la expresión 𝛤(𝑛) =𝛤(𝑛+1)
𝑛 para el cálculo de
la función 𝛤(0), encontramos que esta no existe, ya que implica una
división por cero. Igualmente, podemos verificar que tampoco existe la
función Gamma de cualquier número entero negativo.
𝛤(3) =𝛤(3 + 1)
3=
𝛤(4)
3=
3!
3=
(3)(2)(1)
3= 2
𝛤(2) =𝛤(2 + 1)
2=
𝛤(3)
2=
2!
2=
(2)(1)
2= 1
𝛤(1) =𝛤(1 + 1)
1= 𝛤(2) = 1
𝛤(0) =𝛤(0 + 1)
0=
𝛤(1)
0=
1
0= ∞
𝛤(−1) =𝛤(−1 + 1)
−1=
𝛤(0)
−1= −∞
𝛤(−2) =𝛤(−2 + 1)
−2=
𝛤(−1)
−2=
−∞
−2= ∞
𝛤(−3) =𝛤(−3 + 1)
−3=
𝛤(−2)
−3=
∞
−3= −∞
Y así sucesivamente.
En general, si 𝑛 es un número entero positivo, entonces 𝛤(−𝑛) = ±∞.
Ya hemos visto que, por el contrario, la función Gamma sí existe para
números negativos fraccionarios. Se puede concluir, a partir de lo ya
visto, que la función gamma es continua para todo n excepto en los
puntos (Polos de la función): 𝑛 = 0, − 1, − 2, − 3, 4, 5, 6, 7, 9, … … …

65
2.6 Otras definiciones de la Función Gamma (𝚪) según otros
autores
La definición de la Función Gamma utilizada por Gauss:
Recordando que
𝑒−𝑡 = lim𝑛→∞
(1 −𝑡
𝑛)
𝑛
Entonces,
Γ(𝑛) = lim𝑛→∞
∫ (1 −𝑡
𝑛)
𝑛
𝑡𝑥−1𝑑𝑡𝑛
0
lim𝑛→∞
𝑛𝑥 ∫ (1 − 𝑠)𝑛𝑠𝑥−1𝑑𝑡1
0
Integrando por partes 𝑛 veces, se obtiene:
∫ (1 − 𝑠)𝑛𝑠𝑥−1𝑑𝑡1
0
=
[1
𝑥𝑠𝑥(1 − 𝑠)𝑛]
0
1
+𝑛
𝑥∫ (1 − 𝑠)𝑛−1𝑠𝑥
1
0
𝑑𝑠 = ⋯ =𝑛(𝑛 − 1) … 1
𝑥(𝑥 + 1) … (𝑥 + 𝑛)
Por lo que
𝛤(𝑛) = lim𝑛→∞
𝑛! 𝑛𝑥
𝑥(𝑥 + 1)(𝑥 + 2)(𝑥 + 3) … (𝑥 + 𝑛)
=1
𝑥lim
𝑛→∞(
1
𝑥 + 1) (
2
𝑥 + 2) … (
𝑛
𝑥 + 𝑛)
2𝑥
1𝑥
3𝑥
2𝑥… …
(𝑛 − 1)𝑥
(𝑛 − 2)𝑥
𝑛𝑥
(𝑛 − 1)𝑥
Entonces,
𝛤(𝑛) =1
𝑥∏ [(1 +
1
𝑛)
𝑥
(1 +𝑥
𝑛)
−1
]
∞
𝑛=1

66
Este producto es convergente para toda 𝑧 distinta de 0, −1, −2, . . . , −𝑛, . ..
Por lo tanto ya tenemos una expresión que nos sirve para expresar 𝛤(𝑛)
sin la restricción que teníamos originalmente de que 𝑅𝑒(𝑧) > 0.
La relación anterior es conocida como Fórmula de Euler, pues es el quien
la establece por primera vez en 1729 en una carta a Goldbach.
Posteriormente es usada por Gauss como definición de la función 𝛤(𝑛).
La definición de la Función Gamma utilizada por Weierstrass o
simplemente forma canónica de Weierstrass:
Para definir la función Gama, Weierstrass usa la expresión como
producto, que a continuación desarrollamos. Dicha relación había ya sido
publicada por Francis William Newman en el año 1848. De la fórmula
previa a la de Euler, tenemos directamente que:
1
𝛤(𝑛)= lim
𝑛→∞[𝑥 (1 +
𝑥
1) (1 +
𝑥
2) (1 +
𝑥
3) + ⋯ + (1 +
1
𝑛) 𝑒−𝑥 ln(𝑛)]
= lim𝑛→∞
[𝑥 (1 +𝑥
1) 𝑒−𝑥 (1 +
𝑥
2) 𝑒
1𝑥
𝑥 … (1 +1
𝑛) 𝑒−
1𝑛
𝑥𝑒[(1+12
+13
+⋯+1𝑛
)−ln(𝑛)]𝑥]
Pero [(1 +1
2+
1
3+ ⋯ +
1
𝑛) − ln(𝑛)] es convergente y el límite se denota por 𝛾
y es llamada la constante de Euler-Mascheroni, la cual está dada por la
siguiente expresión
𝛾 = lim𝑛→∞
(𝐻𝑛 − ln 𝑛) ≅ 0.57721566
67
Donde 𝐻𝑛 = 1 +1
2+
1
3+
1
4+
1
5+ ⋯ +
1
𝑛
Y de dónde se obtiene,
1
𝛤(𝑛)= 𝑥𝑒𝛾𝑥 ∏ [(1 +
𝑥
𝑛) 𝑒−𝑥 𝑛⁄ ]
∞
𝑛=1
Esta expresión es conocida como fórmula canónica de Weierstrass.
2.7 Funciones Gamma (𝚪) incompletas
Estas funciones Gamma incompletas se definen por
𝛾(𝑛, 𝛼) = ∫ 𝑒−𝑡𝑡𝑛−1𝛼
0
𝑑𝑡
𝛤(𝑛, 𝛼) = ∫ 𝑒−𝑡𝑡𝑛−1∞
𝛼
𝑑𝑡
Por lo que es evidente que se cumple la siguiente expresión
𝛾(𝑛, 𝛼) + 𝛤(𝑛, 𝛼) = 𝛤(𝑛)
2.8 El símbolo (𝝀)𝒌 de Pochhammer
(𝜆)𝑘 = 1
Entonces (𝜆)𝑘 = 𝜆(𝜆 + 1)(𝜆 + 2)(𝜆 + 3) … . (𝜆 + 𝑘 − 1) =Γ(𝜆+𝑘)
Γ(𝜆)
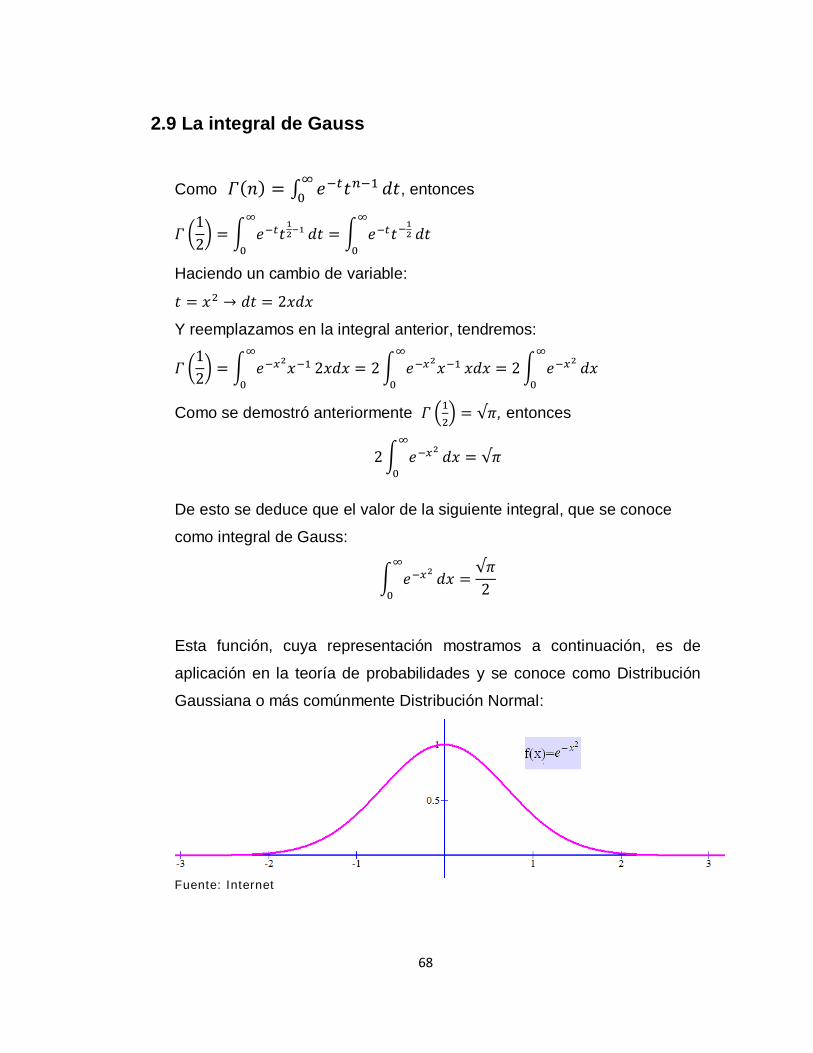
68
2.9 La integral de Gauss
Como 𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0𝑑𝑡, entonces
𝛤 (1
2) = ∫ 𝑒−𝑡𝑡
12
−1
∞
0
𝑑𝑡 = ∫ 𝑒−𝑡𝑡−12
∞
0
𝑑𝑡
Haciendo un cambio de variable:
𝑡 = 𝑥2 → 𝑑𝑡 = 2𝑥𝑑𝑥
Y reemplazamos en la integral anterior, tendremos:
𝛤 (1
2) = ∫ 𝑒−𝑥2
𝑥−1∞
0
2𝑥𝑑𝑥 = 2 ∫ 𝑒−𝑥2𝑥−1
∞
0
𝑥𝑑𝑥 = 2 ∫ 𝑒−𝑥2∞
0
𝑑𝑥
Como se demostró anteriormente 𝛤 (1
2) = √𝜋, entonces
2 ∫ 𝑒−𝑥2∞
0
𝑑𝑥 = √𝜋
De esto se deduce que el valor de la siguiente integral, que se conoce
como integral de Gauss:
∫ 𝑒−𝑥2∞
0
𝑑𝑥 =√𝜋
2
Esta función, cuya representación mostramos a continuación, es de
aplicación en la teoría de probabilidades y se conoce como Distribución
Gaussiana o más comúnmente Distribución Normal:
Fuente: Internet

69
El área encerrada bajo esa curva con el eje 𝑥 es la función Gaussiana y la
integral de Gauss
∫ 𝑒−𝑥2∞
−∞
𝑑𝑥 = √𝜋
En matemáticas la integral de Gauss, integral Gaussiana o integral de
probabilidad, es la integral impropia de la función Gaussiana 𝑒−𝑥2 sobre
toda la recta de los reales.
“Esta integral tiene amplias aplicaciones, incluyendo normalización, en
teoría de la probabilidad y transformada contínua de Fourier. También
aparece en la definición de la función error. A pesar de que no existe
ninguna función elemental para la función error, como se puede
demostrar mediante el algoritmo de Risch, la integral Gaussiana puede
ser resuelta analíticamente con las herramientas del cálculo. O sea, no
existe una integral indefinida
∫ 𝑒−𝑥2𝑑𝑥
elemental para la función Gaussiana y la integral de Gauss pero si es
posible evaluar la integral definida” (Valenzuela, F.; 2008)
∫ 𝑒−𝑥2∞
−∞
𝑑𝑥

70
2.10 Estrategia para la identificación y aplicación de las
funciones Gamma y Beta
Nuestra estrategia se desarrollara aplicando la siguiente secuencia:
a) Identificando el tipo de integral que se presenta.
b) Si esta es impropia, procedemos a verificar si es de primera o
segunda especie.
c) Verificamos si la función a integrar es del tipo Gamma o Beta para
su resolución. Será una función Gamma si es de la forma
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0𝑑𝑡 para 𝑛 > 1 y será una función Beta si es de
la forma 𝛽(𝑛, 𝑟) = ∫ 𝑥𝑛−11
0(1 − 𝑥)𝑟−1𝑑𝑥.
d) Determinamos los parámetros de la función Gamma o Beta, según
sea el caso, y determinamos su convergencia. La función Gamma
es convergente si 𝑛 > 0 y la función Beta 𝛽(𝑛, 𝑟) converge cuando
𝑛 > 0 y 𝑟 > 0.
e) Finalmente, se resuelve aplicando la definición de una de estas
dos funciones especiales.
f) Se deja al lector la comparación con los métodos de integración
tradicionales.

71
2.11 Ejemplos prácticos
Determine la convergencia de las siguientes integrales y calcule el valor
de las mismas:
Ejemplo No. 1
∫ 𝑒−𝑥 ∙ 𝑥3𝑑𝑥∞
1
Solución:
1er. Paso: identificar el tipo de integral.
∫ 𝑒−𝑥 ∙ 𝑥3𝑑𝑥∞
1
Podemos notar que esta integral es una integral impropia, puesto que los
límites de integración no son acotados, o sea, son uno e infinito y se debe
utilizar la función Gamma para resolverla, ya que está presente en ella la
función exponencial 𝑒𝑥.
2do. Paso: Identificamos los parámetros 𝑛 y 𝑡, usando la
definición de función Gamma que analizamos anteriormente.
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0
𝑑𝑡 = (𝑛 − 1)!
Y como
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥∞
1
Entonces 𝑛 − 1 = 4, por lo que 𝑛 = 5
Y 𝑡 = 1.

72
3er. Paso: Analizamos la convergencia de la función impropia.
Como 𝑛 = 5 > 0, entonces la integral
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥∞
1
Es convergente.
4to. Paso: Realizamos el cálculo de la integral
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0
𝑑𝑡 = (𝑛 − 1)!
𝛤(5) = (5 − 1)! = 4! = 24
Por tanto, se concluye que
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥 = 24∞
1
Resolvamos esta integral por uno de los métodos tradicionales
de integración:
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥∞
1
Integrando por partes:
𝑢 = 𝑥4 𝑑𝑣 = 𝑒−𝑥𝑑𝑥
𝑑𝑢 = 4𝑥3𝑑𝑥 𝑣 = ∫ 𝑒−𝑥𝑑𝑥 = −𝑒−𝑥

73
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥∞
1
= (𝑥4)(−𝑒−𝑥) − ∫(−𝑒−𝑥)(4𝑥3)𝑑𝑥
= −𝑥4𝑒−𝑥 + 4 ∫ 𝑥3𝑒−𝑥𝑑𝑥
Integrando por partes:
𝑢 = 𝑥3 𝑑𝑣 = 𝑒−𝑥𝑑𝑥
𝑑𝑢 = 3𝑥2𝑑𝑥 𝑣 = ∫ 𝑒−𝑥𝑑𝑥 = − 𝑒−𝑥
= −𝑥4𝑒−𝑥 + 4 ∫ 𝑥3𝑒−𝑥𝑑𝑥 = −𝑥4𝑒−𝑥 + 4 [(𝑥3)(−𝑒−𝑥) − ∫(−𝑒−𝑥)(3𝑥2)𝑑𝑥]
= −𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 + 12 ∫ 𝑥2𝑒−𝑥𝑑𝑥
Integrando por partes:
𝑢 = 𝑥2 𝑑𝑣 = 𝑒−𝑥𝑑𝑥
𝑑𝑢 = 2𝑥𝑑𝑥 𝑣 = ∫ 𝑒−𝑥𝑑𝑥 = − 𝑒−𝑥
= −𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 + 12 [(𝑥2)(−𝑒−𝑥) − ∫(−𝑒−𝑥)(2𝑥)𝑑𝑥]
= −𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 − 12𝑥2𝑒−𝑥 + 24 ∫ 𝑥𝑒−𝑥𝑑𝑥
Integrando por partes:
𝑢 = 𝑥 𝑑𝑣 = 𝑒−𝑥𝑑𝑥
𝑑𝑢 = 𝑑𝑥 𝑣 = ∫ 𝑒−𝑥𝑑𝑥 = − 𝑒−𝑥
= −𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 − 12𝑥2𝑒−𝑥 + 24 [(𝑥)(−𝑒−𝑥) − ∫(−𝑒−𝑥)𝑑𝑥]

74
= −𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 − 12𝑥2𝑒−𝑥 − 24𝑥𝑒−𝑥 + 24 ∫ 𝑒−𝑥𝑑𝑥
= [−𝑥4𝑒−𝑥 − 4𝑥3𝑒−𝑥 − 12𝑥2𝑒−𝑥 − 24𝑥𝑒−𝑥 − 24𝑒−𝑥]|1∞
= 𝑒−𝑥[−𝑥4 − 4𝑥3 − 12𝑥2 − 24𝑥 − 24]|1∞
= 𝑒−∞[−(∞)4 − 4(∞)3 − 12(∞)2 − 24(∞) − 24]
− 𝑒−1[−(1)4 − 4(1)3 − 12(1)2 − 24(1) − 24]
= 0 − 𝑒−1[−1 − 4 − 12 − 24 − 24]
= −𝑒−1[−65]
=65
𝑒= 23.912163676143750903709045060495 ≅ 24
Por tanto, se concluye que
∫ 𝑒−𝑥 ∙ 𝑥4𝑑𝑥 ≅ 24∞
1
Como podemos ver si aplicamos la función Gamma a este tipo de integrales,
resulta más simple el cálculo y nos permite relacionarnos con el factorial de
un número.

75
Ejemplo No. 2
∫ln 𝑥
𝑥2𝑑𝑥
∞
0
Solución:
1er. Paso: identificar el tipo de integral.
∫ 𝑥−2 ln 𝑥 𝑑𝑥∞
0
Haciendo un cambio de variable:
𝑥 = 𝑒𝑡
𝑑𝑥 = 𝑒𝑡𝑑𝑡
Así también se realiza una actualización de los límites de integración:
𝑥 = 1 y sabemos que 𝑥 = 𝑒𝑡 → 𝑡 = 0
𝑥 = ∞ sustituyendo en 𝑥 = 𝑒𝑡 → 𝑡 = ∞
∫ 𝑒−2𝑡 ∙ ln 𝑒𝑡 ∙ 𝑒𝑡𝑑𝑡∞
0
= ∫ 𝑒−2𝑡 ∙ 𝑡 ∙ 𝑒𝑡𝑑𝑡 = ∫ 𝑒−𝑡 ∙ 𝑡𝑑𝑡∞
0
∞
0
Podemos notar que esta integral es una integral impropia, puesto que los
límites de integración no son acotados, o sea, son cero e infinito y se
debe utilizar la función Gamma para resolverla, ya que está presente en
ella la función exponencial 𝑒𝑥.
2do. Paso: Identificamos los parámetros 𝑛 y 𝑡, usando la
definición de función Gamma que analizamos anteriormente.
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0
𝑑𝑡 = (𝑛 − 1)!
Y como

76
∫ 𝑒−𝑡 ∙ 𝑡𝑑𝑡∞
0
Entonces 𝑛 − 1 = 1, por lo que 𝑛 = 2
Y −𝑡 = 1, entonces 𝑡 = −1
3er. Paso: Analizamos la convergencia de la función impropia.
Como 𝑛 = 2 > 0, entonces la integral
∫ 𝑒−𝑡 ∙ 𝑡𝑑𝑡∞
0
Es convergente.
4to. Paso: Realizamos el cálculo de la integral
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0𝑑𝑡 = (𝑛 − 1)!
𝛤(2) = (2 − 1)! = 1! = 1
Por tanto, se concluye que
∫ln 𝑥
𝑥2𝑑𝑥 = 1
∞
0
77
Ejemplo No. 3
∫𝑥
𝑒𝑥2 𝑑𝑥∞
0
Solución
1er. Paso: identificar el tipo de integral.
∫𝑥
𝑒𝑥2 𝑑𝑥∞
0
= ∫ 𝑥 ∙ 𝑒−𝑥2𝑑𝑥
∞
0
Haciendo un cambio de variable:
𝑡 = −𝑥2
𝑑𝑡 = −2𝑥𝑑𝑥
Así también se realiza una actualización de los límites de integración:
𝑥 = 0 y sabemos que 𝑡 = −𝑥2 → 𝑡 = 0
𝑥 = ∞ Sustituyendo en 𝑡 = −𝑥2 → 𝑡 = −∞
∫𝑥
𝑒𝑥2 𝑑𝑥∞
0
= −1
2∫ 𝑒𝑡𝑑𝑡
−∞
0
=1
2∫ 𝑒𝑡𝑑𝑡
∞
0
Podemos notar que esta integral es una integral impropia, puesto que los
límites de integración no son acotados, o sea, son cero e infinito y se debe
utilizar la función Gamma para resolverla, ya que está presente en ella la
función exponencial 𝑒𝑥.
2do. Paso: Identificamos los parámetros 𝑛 y 𝑡, usando la
definición de función Gamma que analizamos anteriormente.
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0
𝑑𝑡 = (𝑛 − 1)!
Y como
1
2∫ 𝑒𝑡𝑑𝑡
∞
0

78
Entonces 𝑛 − 1 = 0, por lo que 𝑛 = 1 y 𝑡 = 1
3er. Paso: Analizamos la convergencia de la función impropia.
Como 𝑛 = 1 > 0, entonces la integral
1
2∫ 𝑒𝑡𝑑𝑡
∞
0
Es convergente.
4to. Paso: Realizamos el cálculo de la integral
𝛤(𝑛) = ∫ 𝑒−𝑡𝑡𝑛−1∞
0
𝑑𝑡 = (𝑛 − 1)!
(1
2)𝛤(1) = (
1
2) (1 − 1)! = (
1
2) 0! = (
1
2) (1) =
1
2
1
2∫ 𝑒𝑡𝑑𝑡 =
1
2
∞
0
Por tanto, se concluye que
∫𝑥
𝑒𝑥2 𝑑𝑥 =∞
0
1
2

79
Ejemplo No. 4
∫(1 − 𝑥)
12⁄
√𝑥𝑑𝑥
1
0
Solución
1er. Paso: identificar el tipo de integral.
Podemos notar que esta integral es una integral impropia, pero en este caso
los límites de integración son acotados, o sea, son cero y uno, además se
debe utilizar la función Beta para resolverla por las características que
muestra.
2do. Paso: Identificamos los parámetros 𝑛 y 𝑟, usando la
definición de función Beta que analizamos anteriormente
𝛽(𝑛, 𝑟) = ∫ 𝑥𝑛−11
0(1 − 𝑥)𝑟−1𝑑𝑥 =
𝛤(𝑛)𝛤(𝑟)
𝛤(𝑛+𝑟)
Entonces
∫(1 − 𝑥)
12⁄
√𝑥𝑑𝑥
1
0
= ∫ 𝑥−1
2⁄ ∙ (1 − 𝑥)1
2⁄ 𝑑𝑥1
0
De donde 𝑛 − 1 = −1
2, entonces 𝑛 =
1
2
y 𝑟 − 1 =1
2, entonces 𝑟 =
3
2
3er. Paso: Realizamos el cálculo de la integral
∫(1 − 𝑥)1
2⁄
√𝑥𝑑𝑥
1
0
= ∫ 𝑥−1
2⁄ ∙ (1 − 𝑥)1
2⁄ 𝑑𝑥 =1
0
𝛽 (1
2,
3
2)
=𝛤(1
2)𝛤(32)
𝛤(12 + 3
2)=
𝛤(12)𝛤(3
2)
𝛤(2)=
(√𝜋) (√𝜋2
)
(2 − 1)!=
𝜋2
1!=
𝜋2
1=
𝜋
2
80
Por tanto, se concluye que
∫(1 − 𝑥)1
2⁄
√𝑥𝑑𝑥
1
0
=𝜋
2
2.12 Aplicaciones de las Funciones Gamma (𝚪) y Beta (𝜷)
Sirve de modelo para numerosos experimentos en donde interviene el
tiempo como sucede en las llegadas de aviones a un aeropuerto y en
general a los problemas de teoría de colas.
Ejemplo:
Problemas de tráfico en líneas telefónicas, ERLANG, 1900.
Problemas de Teoría de la confiabilidad
Ejemplo
Tiempo de falla de un sistema de componentes, cada uno falla con
frecuencia.
– El tiempo (o espacio) requerido para observar ocurrencias del evento A
en el intervalo t (o región del espacio), sucesos del tipo Poisson.
– Flujos máximos, MARKOVIC, 1965.
– Resistencia de componentes del concreto reforzado, TICHY VARLIETK,
1965.
– Altura de la precipitación mensual, WHITCOMB, 1940.
– Ingresos familiares.
– Edad del hombre al contraer matrimonio por primera vez.
– Tiempo total para completar una operación, sí ésta se lleva a cabo
en subestaciones a una frecuencia

81
Ejemplo No. 1
Supóngase que el intervalo de tiempo 𝑥 necesario para efectuar una
comprobación periódica de mantenimiento, de acuerdo a la experiencia,
en un dictáfono, sigue una Distribución Gamma con 𝛼 = 3 y 𝛽 = 2
(minutos). Calcule la probabilidad de que un mecánico necesite entre 10 y
20 minutos, para revisar un dictáfono.
Solución:
Γ(𝑥
𝛼 ,𝛽) = {
1
𝛽𝛼𝛤(𝛼)𝑥𝛼−1𝑒−𝑥 𝛽⁄ 𝑥 > 0
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
Γ (𝑥
3 ,2) = {
1
23𝛤(3)𝑥3−1𝑒−𝑥 2⁄ 𝑥 > 0
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
Γ (𝑥
3 ,2) = {
1
23 ∙ 2!𝑥2𝑒−𝑥 2⁄ 𝑥 > 0
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
Γ (𝑥
3 ,2) = {
1
16𝑥2𝑒−𝑥 2⁄ 𝑥 > 0
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
𝑃(10 ≤ 𝑥 ≤ 20) = ∫1
16𝑥2
20
10
𝑒−𝑥 2⁄ 𝑑𝑥 =1
16∫ 𝑥2
20
10
𝑒−𝑥 2⁄ 𝑑𝑥
Integrando por partes:
𝑢 = 𝑥2 𝑑𝑣 = 𝑒−𝑥 2⁄ 𝑑𝑥
𝑑𝑢 = 2𝑥𝑑𝑥 𝑣 = ∫ 𝑒−𝑥 2⁄ 𝑑𝑥 = −2 𝑒−𝑥 2⁄

82
1
16∫ 𝑥2
20
10
𝑒−𝑥 2⁄ 𝑑𝑥 =1
16[(𝑥2)(−2𝑒−𝑥 2⁄ ) − ∫(−2𝑒−𝑥 2⁄ )(2𝑥)𝑑𝑥]
= −1
8𝑥2𝑒−𝑥 2⁄ +
1
4∫ 𝑥𝑒−𝑥 2⁄ 𝑑𝑥
Integrando por partes:
𝑢 = 𝑥 𝑑𝑣 = 𝑒−𝑥 2⁄ 𝑑𝑥
𝑑𝑢 = 𝑑𝑥 𝑣 = ∫ 𝑒−𝑥 2⁄ 𝑑𝑥 = −2 𝑒−𝑥 2⁄
1
16∫ 𝑥2
20
10
𝑒−𝑥 2⁄ 𝑑𝑥 = −1
8𝑥2𝑒−𝑥 2⁄ +
1
4[(𝑥)(−2𝑒−𝑥 2⁄ ) − ∫ −2𝑒−𝑥 2⁄ 𝑑𝑥]
= −1
8𝑥2𝑒−𝑥 2⁄ −
1
2𝑥𝑒−𝑥 2⁄ +
1
2∫ 𝑒−𝑥 2⁄ 𝑑𝑥
= [−1
8𝑥2𝑒−𝑥 2⁄ −
1
2𝑥𝑒−𝑥 2⁄ +
1
2(−2𝑒−𝑥 2⁄ )]|
10
20
= [−1
8𝑥2𝑒−𝑥 2⁄ −
1
2𝑥𝑒−𝑥 2⁄ − 𝑒−𝑥 2⁄ ]|
10
20
Factorizando:
=1
16𝑒−𝑥 2⁄ [−2𝑥2 − 8𝑥 − 16]|
10
20
=1
16{𝑒−10[−2(20)2 − 8(20) − 16] − 𝑒−5[−2(10)2 − 8(10) − 16]}
=1
16[𝑒−10(−976) − 𝑒−5(296)]
=−61
𝑒10+
37
2𝑒5= 0.1219
Por tanto, la probabilidad de que un mecánico necesite entre 10 y 20
minutos, para revisar un dictáfono es de 12.19%.

83
Ejemplo No. 2
Un distribuidor de gasolina tiene tanques de almacenamiento con un
aprovisionamiento fijo. Los tanques se llenan cada martes. Para el
distribuidor es importante la proporción de este volumen que se vende
durante la semana. Durante varias semanas se ha observado que esa
proporción se asemeja a una distribución de densidad Beta con 𝛼 = 5 𝑦 𝛽 = 3
¿Cuál es la probabilidad de que se venda por lo menos el 80% de su
capacidad en una semana determinada?
Solución:
𝑥: la proporción de este volumen de gasolina que se vende durante la
semana.
La función de densidad Beta viene dada por:
𝛽(𝑥
𝛼 ,𝑟) = {
𝛤(𝛼+𝛽)
𝛤(𝛼)𝛤(𝛽)𝑥𝛼−1(1 − 𝑥)𝛽−1 0 < 𝑥 < 1
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
𝛽(𝑥
5 ,3) = {
𝛤(5+3)
𝛤(5)𝛤(3)𝑥5−1(1 − 𝑥)3−1 0 < 𝑥 < 1
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
𝛽(𝑥
5 ,3) = {
𝛤(8)
𝛤(5)𝛤(3)𝑥4(1 − 𝑥)2 0 < 𝑥 < 1
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
𝛽 (𝑥
5 ,3) = {
7!
4! 2!𝑥4(1 − 𝑥)2 0 < 𝑥 < 1
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠
𝛽 (𝑥
5 ,3) = {105𝑥4(1 − 𝑥)2 0 < 𝑥 < 1
0 𝑒𝑛 𝑜𝑡𝑟𝑜𝑠 𝑐𝑎𝑠𝑜𝑠

84
𝑃(𝑥 > 0.80) = ∫ 105𝑥41
0.80
(1 − 𝑥)2𝑑𝑥 = ∫ 105𝑥41
0.80
(1 − 2𝑥 + 𝑥2)𝑑𝑥
𝑃(𝑥 > 0.80) = ∫ (105𝑥41
0.80
− 210𝑥5 + 105𝑥6)𝑑𝑥
𝑃(𝑥 > 0.80) = 21𝑥5 − 35𝑥6 + 15𝑥7|0.801
= [21(1)5 − 35(1)6 + 15(1)7] − [21(0.80)5 − 35(0.80)6 + 15(0.80)7]
= 1 − 0.8520 = 0.1480
Entonces, la probabilidad de que se venda por lo menos el 80% de su
capacidad en una semana determinada es 14.80%.

85
A continuación proponemos algunos ejercicios de aplicación de las
Funciones Gamma y Beta:
Ejercicio No. 1
La carga sostenida en una zapata de concreto de un edificio en proyecto
es una variable aleatoria. Supóngase que la carga muerta tiene una
distribución gamma con 𝛼 = 8 y 𝛽 = 2. Las unidades son miles de libras.
a) Establecer la distribución gamma según estos datos.
b) Calcular la probabilidad de que la carga sostenida esté entre 12 y 18.
Ejercicio No. 2
En cierta ciudad, el consumo de energía eléctrica, en millones de kilowatt-
horas, es una variable aleatoria que tiene una distribución gamma con 𝛼 = 2
y 𝛽 = 3. Si la planta de energía tiene una capacidad de producción diaria de
11 millones de kilowatt-horas ¿Cuál es la probabilidad de que este suministro
de energía sea insuficiente en un día cualquiera?
Ejercicio No. 3
La proporción de hierro puro en determinadas muestras de mineral tiene una
distribución beta con 𝛼 = 4 y 𝛽 = 2.
a) Estimar la probabilidad de que una de esas muestras tenga más del
50% de hierro puro.
b) Calcular la probabilidad de que dos de estas muestras tengan menos
que el 28% de hierro puro.

86
CONCLUSIÓN
Este trabajo muestra elementos de una estrategia de enseñanza para
la identificación y aplicación de manera correcta de dos tipos de
integrales impropias conocidas como funciones Gamma y Beta, que
intenta, además, reforzar el conocimiento matemático actual en los
estudiantes universitarios, especialmente de UNAPEC.
La idea de utilizar esta estrategia en este tipo de funciones podría
implicar una mejoría significativa en la comprensión de los estudiantes
y en ayudarles a superar algunas dificultades relacionadas con el
concepto y aplicación de funciones Gamma y Beta. Nuestra
experimentación nos permitió ver que el trabajo de construir ejemplos
y la interpretación de los resultados, permite a los estudiantes
reconocer esta estrategia y aceptarla. Además, el conocimiento de
nuestros estudiantes sobre las Gamma y Beta deberá ser más fuerte y
resistente.
El estudio de la función Gamma a través del cálculo diferencial e
integral de funciones de una variable real proporciona la resolución de
ciertas integrales impropias de una forma muy simple y la
comprensión de la distribución de probabilidad Gamma y Beta.
Se ha comprobado que matemáticamente la función gamma extiende
el concepto de factorial a los números complejo, haciendo excepción a
los enteros negativos y ceros. La función gamma es muy importante y
su amplia utilización en la gran variedad de funciones de fiabilidad de
dispositivos o sistemas, permite realizar mejores cálculos, como es el
caso de método de la máxima verosimilitud.

87
RECOMENDACIONES
Restan algunas preguntas abiertas que deberán serán abordadas en
futuras investigaciones. Por ejemplo, el uso regular de nuestra
estrategia durante un cuatrimestre y sus efectos en la actitud de los
estudiantes hacia la aplicación de las funciones Gamma y Beta en
distintos campos del saber, es una pregunta interesante, así como la
relación que presentan estas integrales impropias a las que se les
puede aplicar estas funciones con el factorial de un número, entre
otros.
Las funciones Gamma y Beta tienen muchos campos de aplicación y
resultaría interesante que esto fuera objeto de estudio en futuras
investigaciones, tanto en el campo real, que fue nuestro enfoque en
este trabajo, como en plano complejo y que esta investigación pueda
servir de base para ellas.
88
BIBLIOGRAFÍA
1. Abascal, R., (2006). Funciones Eulerianas. Facultad Regional Avellaneda,
Buenos Aires, Argentina.
2. Boyer, Carl B. (2007). Historia de la matemática. Alianza Editorial.
3. Cortés, J.C., (1997). Funciones especiales y ecuaciones diferenciales
matriciales. Universidad Politécnica de Valencia.
4. Depool, R. (2013). Probabilidad y estadística. Aplicaciones a la ingeniería
.Universidad nacional experimental Antonio José de sucre. monasterio,
dióscoro
5. ECURED, (2014). Pendiente de una recta. www.ecured.cu.
6. Ferrante, J.J.L., (2009). Una introducción al concepto de límite (dos mil
años en un renglón). Argentina. Editorial de la Universidad Tecnologica
Nacional.
7. González, P. M. (1992). Las raíces del cálculo infinitesimal en el siglo
XVII. Alianza Editorial.
8. González-Martín, A. S. (2002). Dificultades, obstáculos y errores en el
aprendizaje del concepto de integral impropia. Tesis de Maestría,
Universidad de La Laguna (España) – sin publicar.
9. Hernández, Y. N. (Pág. 83, Nº 2 Octubre 2013). diseño instruccional de
las funciones matemáticas siguiendo la metodología del modelo de
enseñanza directa. Universidad Nacional Abierta Valencia, Venezuela.
10. Islas, T.; Villegas, I.; Ruiz, S., (2012). Álgebra su enseñanza y
aprendizaje. es.slideshare.net
11. Kepler, J. (1615). Nova stereometria doliolum vinatorum.
12. marlhen.wordpress.com, (pág. 2, Abril 2010). Integrales definidas.
Marlhen’s blog.
13. Mazón, A. .La función gamma en la disciplina Matemática para las
carreras de ingeniería. Universidad de Pinar del Río, Cuba.

89
14. Morris, K. (1972). El pensamiento matemático de la antigüedad a nuestros
días. Vol. I. Alianza Editorial,
15. Newton, I., (5 de julio de 1687). Philosophiæ naturalis principia
mathematica.
16. Ramírez, K. P. (11 abril 2009). Función Gamma. Tacna, Perú.
17. Rivaud, J. J. (2004). La función Gamma.
18. Semerari, F. (2008). Ecuaciones diferenciales y métodos matemáticos.
Semerari, Francesco. República Dominicana.
19. Sorando, J.M., (marzo 2002). La derivada, el lenguaje del movimiento,
boletín de la sociedad Aragonesa Pedro Sánchez Ciruelo de profesores
de matemáticas, No. 12 Zaragoza.
20. Suarez, M. M. (2008). Orígenes del Cálculo Diferencial e Integral, Historia
del Análisis Matemático.
21. Tamayo, E., (20 de octubre de 2009). Los métodos de la ciencia.
Monografias.com
22. Valdivia, E.; de la Cruz, J., (Marzo 2012). Métodos de investigación. ISPP
Salesiano.
23. Valenzuela, Francisco. 08 julio 2012. Gauss y la integral Gaussiana.
Ayudantías Usach.
24. Vásquez, L. M. (1999). Sobre la función Gamma. Universidad Nacional de
Colombia.
25. Villalobos (2006). Funciones Gamma y Beta.


















