![; rect. BO. País Vasco , núm. 26, [pág. 365]. (castellano) · mayo (LPV 1998, 301) , contra la Exclusión Social -modificada por laLey 8/2000 (LPV 2000, 1) y la Ley 9/2000, ambas](https://static.fdocuments.co/doc/165x107/5f54852a770bb54ef0336374/-rect-bo-pas-vasco-nm-26-pg-365-castellano-mayo-lpv-1998-301.jpg)
ESTUDIO DE TÉCNICAS DE CONMUTACIÓN CON …web.fi.uba.ar/~aghersin/GarciaViolini_Colmegna.pdf ·...
115
ESTUDIO DE TÉCNICAS DE CONMUTACIÓN CON APLICACIÓN A CONTROL LPV Proyecto Final de la Carrera de Ingeniería en Automatización y Control Industrial diego demián garcía violini y patricio hernán colmegna Director: Dr. Alejandro Simón Ghersin Dpto. de Ing. Electrónica Instituto Tecnológico de Buenos Aires Co-Director: Dr. Juan Ignacio Giribet Depto. de Ciencia y Tecnología Universidad Nacional de Quilmes Julio de 2010 Aprobado por: Ing. Fabiana Ferreira Ing. Javier Pérez Dr. Ing. Pablo Servidia Prof. Asociada – UNQ Prof. Adjunto – UNQ CONAE [ 5 de julio de 2010 at 14:57 ]
Transcript of ESTUDIO DE TÉCNICAS DE CONMUTACIÓN CON …web.fi.uba.ar/~aghersin/GarciaViolini_Colmegna.pdf ·...

ESTUDIO DE TÉCNICAS DE CONMUTACIÓN CON APLICACIÓNA CONTROL LPV
Proyecto Final de la Carrera deIngeniería en Automatización y Control Industrial
diego demián garcía violini
y
patricio hernán colmegna
Director: Dr. Alejandro Simón GhersinDpto. de Ing. Electrónica
Instituto Tecnológico de Buenos AiresCo-Director: Dr. Juan Ignacio Giribet
Depto. de Ciencia y TecnologíaUniversidad Nacional de Quilmes
Julio de 2010
Aprobado por:
Ing. Fabiana Ferreira Ing. Javier Pérez Dr. Ing. Pablo Servidia
Prof. Asociada – UNQ Prof. Adjunto – UNQ CONAE
[ 5 de julio de 2010 at 14:57 ]

Diego Demián García Violini y Patricio Hernán Colmegna: ESTUDIO DE TÉC-NICAS DE CONMUTACIÓN CON APLICACIÓN A CONTROL LPV, ProyectoFinal de la Carrera de Ingeniería en Automatización y Control Industrial , ©Julio de 2010
[ 5 de julio de 2010 at 14:57 ]

A nuestros padres...
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]

Si asumes que no existe esperanza, entonces garantizas que no habrá esperanza.Si asumes que existe un instinto hacia la libertad, entonces existen oportunidadesde cambiar las cosas.
Noam Chomsky
v
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]

A G R A D E C I M I E N T O S , R E C O N O C I M I E N T O S YD E D I C AT O R I A S
del director
Agradezco a Demián y a Patricio el haberme elegido como director para suproyecto final de carrera.
Alejandro S. Ghersin
personales
Este trabajo representa el cierre de una etapa que hemos comenzado a transitarhace ya algunos años, más precisamente, en marzo del dos mil cinco. Y esinevitable mencionar, que si hoy nos encontramos cerrando este camino, es sinlugar a dudas gracias al esfuerzo y ayuda, que mucha gente nos ha brindado ypuesto a nuestra disposición.
Por este motivo, es que aprovechamos estas lineas para mencionar quienesson aquellos que fueron indispensables.
Nuestras familias han estado con nosotros desde mucho antes de comenzareste proyecto, que hoy podemos decir proyecto de vida. Nos han brindadoafecto, valores y nuestra capacidad de discernimiento. Nos acompañaron ennuestros buenos y malos momentos. Nos enseñaron que por más difícil que aveces se presenten las cosas siempre se debe mirar hacia adelante, que siempreexiste solución. Nos acompañaron durante el trayecto de este camino tolerandonuestros cambios de ánimo y humor, pero siempre con alguna palabra de aliento.Por esto y mucho más, es que la primera de las dedicatorias de este trabajo espara ellas.
La segunda de las dedicatorias es para nuestros amigos. También ellos noshan acompañado durante todo este tiempo, compartiendo logros y fracasos,alegrías y tristezas. Por esto y mucho más, este trabajo también va dedicado aellos.
Agradecemos a Alejandro S. Ghersin quien nos ha guiado en gran parte deeste camino. Primero compartiendo su conocimiento técnico con nosotros, luegopor habernos dirigido como sus tesistas y por habernos ayudado en nuestroslogros personales. Pero mas aún, por habernos ofrecido su amistad.
vii
[ 5 de julio de 2010 at 14:57 ]
El segundo de los agradecimientos es para el Dr. Juan Giribet, por haberaceptado colaborar con nosotros como Co-Director de este trabajo.
También al Dr. Fernando Bianchi por haber compartido con nosotros, a travesde Alejandro, algunas ideas que fueron fundamentales en el desarrollo de estetrabajo.
A nuestros docentes de la Universidad Nacional de Quilmes, quienes nos hansabido transmitir gran parte de su saber.
A nuestros compañeros y amigos de la Universidad. Sobre todo a Pablo Man-chione, también hoy, futuro Ingeniero en Automatización y Control Industrial,con quien hemos vivido el mayor tiempo juntos en nuestra etapa de formaciónde grado. Trabajar con él, nos ha resultado por demás agradable.
Finalmente, la última de las dedicatorias va para aquellos que por el simplehecho de cuestionarse las cosas, solamente por curiosidad, comparten connosotros el motivo fundamental que nos ha conducido hasta alcanzar la primermeta de esta largo y arduo camino...
"Lo importante es no dejar de hacerse preguntas"Albert Einstein
institucionales y financieros
El trabajo final de carrera que se reporta en este informe, ha sido apoyado porlas siguientes instituciones:
1. La Universidad Nacional de Quilmes a través del subsidio para el proyectoPUNQ 0530/07 y el subsidio de Apoyo a la Investigación para Estudiantese Investigadores en formación, Categoría 1, SAI 1437/09.
2. La Facultad de Ingeniería de la Universidad de Buenos Aires (FIUBA), através del sistema de suspensión magnética MBC500 y el subsidio TI34
de la programación científica 1998 otorgada al Grupo de Identificación yControl Robusto (GICOR) del Departamento de Electrónica de la FIUBA.
3. La Agencia Nacional de Promoción Científica y Tecnológica a través losproyectos PICT OC-AR 1758 y PICT OC-AR 7263 otorgados a al GICOR-FIUBA en 1999 y 2001.
4. La Comisión Nacional de Actividades Espaciales (CONAE), instituciónque facilitó la placa de adquisición y boneras para la realización de losexperimentos los cuales se realizaron parcialmente en el laboratorio delgrupo de Acceso al Espacio.
viii
[ 5 de julio de 2010 at 14:57 ]

5. El Instituto Tecnológico de Buenos Aires, que autorizó al Dr. Ghersin adirigir el presente trabajo final de carrera.
6. La Fundación YPF, a través del subsidio otorgado a Patricio Colmegnapara la realización de su carrera de grado.
ix
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]

R E S U M E N
El tema del presente informe es la implementación práctica de técnicas avanzadasde control lineal de parámetros variantes (LPV), enfocándose a una aplicaciónen particular, concretamente, el control de una máquina rotativa con suspensiónmagnética activa.
Esta aplicación presenta un desafío para los métodos de control multivariable,teniendo un comportamiento dinámico que la hace apta para ser abordada através de técnicas LPV.
Se muestra como la teoría de control LPV provee una forma sistemática paraconseguir un buena desempeño del caso tratado, en combinación con técnicasde conmutación de controladores.
Las contribuciones fundamentales de este trabajo están dadas por la aplicaciónde la teoría de control LPV, utilizando una novedosa técnica de conmutaciónde controladores LPV para la aplicación en cuestión. También, se logra unsignificativo mejoramiento de los diseños pre-existentes.
xi
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]
Í N D I C E G E N E R A L
1 introducción 1
1.1 Antecedentes 1
1.2 Objetivos 5
1.3 Contribuciones 6
1.4 Organización del Informe 6
2 control lpv 7
2.1 Gain Scheduling y Control LPV 7
2.2 Preliminares 9
2.2.1 Problema de síntesis 12
2.2.2 Análisis con una única función de Lyapunov 16
2.2.3 Presentación del Problema de Control 16
2.2.4 Solución del problema de performance-γ limitado a unaSQLF 17
2.2.5 Sistemas Afines 18
2.2.6 Ubicación de polos LPV 20
2.2.7 Ubicación de polos basada sobre una SQLF 25
2.3 La parametrización de Youla 26
2.4 Enfoque para la síntesis de controladores LPV switcheados 35
2.5 Sistemas LPV switcheados 36
2.6 Control LPV switcheado basado en la parametrización de Youla 37
2.6.1 Planteo del problema 37
2.6.2 Diseño de un controlador LPV switcheado 38
2.6.3 Ventajas y desventajas del procedimiento 40
3 suspensión magnética controlada por conmutación lpv 43
3.1 Motivación 43
3.2 Identificación del MBC500 46
3.2.1 Modelo rígido de 4 DOF 48
3.2.2 Fuerzas, Momentos y Tensiones de Entrada/Salida 49
3.2.3 Linealización y Cambio de Variables 51
3.2.4 Datos Experimentales y Ajuste de los Parámetros 54
3.2.5 Identificación del Compensador 58
3.2.6 Modos flexibles 58
3.2.7 Excentricidad del rotor 60
3.3 Control y Resultados 61
xiii
[ 5 de julio de 2010 at 14:57 ]
xiv Índice general
3.3.1 Introducción 61
3.3.2 Diseño del Sistema LPV 62
3.3.3 Diseño del Controlador Central: M(s) 66
3.3.4 Parametrización Completa del Controlador: Qσ(θ, s) 67
3.3.5 Conjunto de Variación del Parámetro 68
3.3.6 Simulaciones: Respuestas en Frecuencia y Temporales 70
3.3.7 Resultados Experimentales 73
4 conclusiones 87
4.1 Respecto de los Algoritmos Utilizados 87
4.2 Respecto del Control del Sistema de Suspensión Magnética 89
4.3 Investigaciones Próximas 90
bibliografía 93
[ 5 de julio de 2010 at 14:57 ]
Í N D I C E D E F I G U R A S
Figura 2.1 Relaciones entre los modelos lineales. 8
Figura 2.2 Interconexión en forma lineal fraccional entre la planta yel controlador. 14
Figura 2.3 Lazo de interconexión de planta y controlador para laparametrización de Youla. 28
Figura 2.4 Controlador LPV por realimentación de los estados obser-vados. 32
Figura 2.5 Parametrización de Youla LPV. 33
Figura 2.6 Esquema con el parámetro Q para sistemas LPV. 34
Figura 3.1 El MBC500 46
Figura 3.2 Vista superior del MBC500 47
Figura 3.3 MBC500 con el compensador 55
Figura 3.4 Superposición de las dinámicas rígida y flexible 59
Figura 3.5 Diagrama para el modelo de la excentricidad 61
Figura 3.6 Planta Aumentada. 63
Figura 3.7 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 71
Figura 3.8 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 71
Figura 3.9 Respuestas temporales de acuerdo a un perfil de velocidaddeterminado. (a) Posiciones de cada uno de los extremos,(b) señal de actuación para cada uno de los extremos, (c)perfil de velocidad. En negro x2 y en gris x1 72
Figura 3.10 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 72
Figura 3.11 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 73
xv
[ 5 de julio de 2010 at 14:57 ]

xvi Índice de figuras
Figura 3.12 Respuestas temporales de acuerdo a un perfil de velocidaddeterminado. (a) Posiciones de cada uno de los extremos,(b) señal de actuación para cada uno de los extremos, (c)perfil de velocidad. En negro x2 y en gris x1 74
Figura 3.13 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 74
Figura 3.14 Respuestas en frecuencia del máximo valor singular de lasfunciones de sensibilidad de salida. Linea Continua: H∞,Raya Punto: LPV (rmax), Linea de Puntos : LPV (rmin). 75
Figura 3.15 Respuestas temporales de acuerdo a un perfil de velocidaddeterminado. (a) Posiciones de cada uno de los extremos,(b) señal de actuación para cada uno de los extremos, (c)perfil de velocidad. En negro x2 y en gris x1 75
Figura 3.16 Respuesta experimental a 3050 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 77
Figura 3.17 Respuesta experimental a 5000 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 77
Figura 3.18 Respuesta experimental a 3800 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 78
Figura 3.19 Respuesta experimental a 6000 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 78
Figura 3.20 Respuesta experimental a 3000 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 79
Figura 3.21 Respuesta experimental a 5000 rpm en el extremo x1-y1.Eje x con el controlador LPV y eje y con el compensadorinterno. 79
Figura 3.22 Respuesta experimental a 3050 rpm en el extremo x1-y1.Ejes x e y con el compensador interno. 80
Figura 3.23 Respuesta experimental a 4000 rpm en el extremo x1-y1.Ejes x e y con el compensador interno. 81
Figura 3.24 Respuesta experimental a 5000 rpm en el extremo x1-y1.Ejes x e y con el compensador interno. 81
[ 5 de julio de 2010 at 14:57 ]

Figura 3.25 Respuesta experimental a 6000 rpm en el extremo x1-y1.Ejes x e y con el compensador interno. 82
Figura 3.26 Respuesta experimental a 3050 rpm del desplazamiento x1.Región de 100 a 6000 rpm. 82
Figura 3.27 Respuesta experimental a 5000 rpm del desplazamiento x1.Región de 100 a 6000 rpm. 83
Figura 3.28 Respuesta experimental a 3800 rpm del desplazamiento x1.Región de 100 a 7500 rpm. 83
Figura 3.29 Respuesta experimental a 6000 rpm del desplazamiento x1.Región de 100 a 7500 rpm. 84
Figura 3.30 Respuesta experimental a 3000 rpm del desplazamiento x1.Región de 3000 a 5000 rpm. 84
Figura 3.31 Respuesta experimental a 5000 rpm del desplazamiento x1.Región de 3000 a 5000 rpm. 85
Í N D I C E D E C U A D R O S
Cuadro 3.1 Parámetros del MBC500 47
Cuadro 3.2 Índice de performance y conjunto de variación del parámetro. 69
Cuadro 3.3 Resultados obtenidos en Ghersin [13]. 69
A C R Ó N I M O S E T. A L .
lpv Lineal de Parámetros Variantes.
ltv Lineal Tiempo Variante.
lti Lineal Tiempo Invariante.
lmi Desigualdad Lineal Matricial o Linear Matrix Inequality.
sqlf Única función cuadrática de Lyapunov o Single Quadratic Lyapunov Func-tion.
xvii
[ 5 de julio de 2010 at 14:57 ]

xviii acrónimos
pdlf Función de Lyapunov Dependiente del Parámetro o Parameter DependentLyapunov Function.
lft/r Transformación/Representación Lineal Fraccionaria o Linear FractionalTransformation/Representation.
conjuntos
• R: El conjunto de los números reales.
• C: El conjunto de los números complejos.
• Rn×n: El conjunto de las matrices reales de n× n .
• Sn×n: El conjunto de las matrices reales simétricas de n× n.
• L2: El espacio de Lebesgue de funciones de cuadrado integrables.
[ 5 de julio de 2010 at 14:57 ]

1I N T R O D U C C I Ó N
El proyecto final de carrera, cuyo desarrollo se reporta en el presente informe,ha tenido como objetivo, llevar a cabo un estudio de técnicas de control, porconmutación de leyes de control lineales de parámetros variantes (LPV).
1.1 antecedentes
Control LPV
Las técnicas de control LPV fueron desarrolladas con bastante impulso durantela década de 1990 a partir de los trabajos de Becker y Packard [5], Packard[29] y Apkarian y Gahinet [3] que sentaron una base de métodos para diseñoLPV. Otras referencias obligadas que anteceden a las anteriores son Shamma[36], Shamma y Athans [37] y Rugh [31]. En la década del 2000, el control LPVrecibió impulso de los trabajos de Wu [43, 44], Wu y Dong [46], Scherer [34]
Una variedad de problemas de control lineales y no lineales, admiten unabordaje a través de la técnica LPV, con el beneficio de que la técnica ofreceun camino sistemático para el diseño de controladores. A expensas de hacerdiseños eventualmente conservadores, el abordaje de problemas no lineales, hasido establecido en la literatura del área como control quasi-LPV.
Como se comenta en Ghersin [13], algunas características del enfoque LPV, lohacen atractivo desde el punto de vista práctico, a saber:
posibilidad de ser aplicado En una importante cantidad de casos prác-ticos, los problemas pueden ser planteados adecuadamente en el marcoLPV. Como se menciona en Shamma y Athans [37], una amplia gama desistemas no lineales, podrían tratarse como sistemas LPV, posiblemente acosta de un diseño conservador. En este enfoque denominado quasi-LPV,se admite que los parámetros sean estados de los sistemas o variablesdependientes de estos. Al no considerar explícitamente la dependencia delos “parámetros-estados”, y al tratar estos sistemas no lineales como LPVs,se pueden obtener garantías de estabilidad y performance desde el puntode vista teórico.
1
[ 5 de julio de 2010 at 14:57 ]

2 introducción
herencia Los resultados de ([5, 29, 3, 43, 44, 46, 34]), pueden ser consideradoscomo extensiones de los métodos originados en la teoría de Control Ro-busto para sistemas lineales tiempo invariantes (ver Dullerud y Paganini[10], Sánchez Peña y Sznaier [40]). Como consecuencia, la aplicación delcontrol LPV a problemas prácticos, es muy similar al uso de la técnica deControl Óptimo en H∞. En muchos casos, los controladores sintetizadosson el resultado de combinar técnicas LPV con técnicas del control Robusto.Esto puede ser útil en un proceso de diseño iterativo.
computabilidad Una importante razón para que el control LPV sea una téc-nica atractiva, es que tanto los problemas de análisis como los de síntesis decontroladores, pueden ser formulados a través de desigualdades linealesmatriciales (LMIs). Los sistemas de LMIs pueden ser resueltos, eficiente-mente, por medio de varios paquetes de software disponibles [12, 41, 42]).
Los métodos desarrollados en Becker y Packard [5] y Wu et al. [47], fueronmejorados con el empleo del denominado procedimiento-s de bloque lleno (FBSP -Full Block s-Procedure) basado en los trabajos de Scherer [33, 34]. Estos últimosdos, que mejoraron notablemente la conservatividad de las condiciones deanálisis y síntesis de controladores respecto del trabajo de Becker y Packard [5],fueron a su vez complementados por los trabajos de Wu [43, 44], que propusoun marco único para trabajar con Funciones de Lyapunov Dependientes de losParámetros (PDLFs) y multiplicadores de bloque lleno (FBMs), a través del FBSP.
Sin importar la sofisticación teórica desarrollada en algunos de los artículosmencionados, la solución numérica que viene implementada en el LMI-ControlToolbox de Matlab (actualmente inserto en el Toolbox de Control), resuelve uncaso particular del método más primario propuesto en Becker y Packard [5],que es cuando la dependencia de las matrices de la descripción de la plantaen el espacio de los estados es de tipo afín en el vector de parámetros θ, queademás, debe estar restringido a tomar valores en un conjunto compacto P ⊂ Rs.En este caso, la síntesis del controlador se puede llevar a cabo, a través de laresolución de un problema optimización basado en una cantidad finita de LMIs.Este hecho clave hace al método sumamente atractivo desde el punto de vistapráctico. Además, el resultado es muy similar al método de control óptimo enH∞ para sistemas LTI, propuesto por Gahinet y Apkarian [11] (quienes ademásprogramaron los dos método LTI y LPV para Matlab).
Otro resultado que se debe mencionar es el de Ghersin y Sánchez Peña [16],donde se propone un método para conseguir respuestas transitorias adecuadasde sistemas LPV, haciendo una ubicación de polos LPV, la cual es una extensión
[ 5 de julio de 2010 at 14:57 ]
1.1 antecedentes 3
del resultado de Chilali y Gahinet [9] para sistemas LTI. Este método, mejoraconsiderablemente la aplicabilidad práctica de la técnica LPV.
Por el contrario, los métodos basados en PDLFs, Wu et al. [47], Wu [43] y Wu[44] muestran dificultades importantes desde el punto de vista computacional.Mientras que la teoría conduce a problemas de síntesis con un número infinitode LMIs, el uso concreto de estos métodos, requeriría resolver sistemas con unnúmero de LMIs impráctico.
En Wu y Dong [46], a través del uso de FBMs y de funciones de Lyapunov condependencia del parámetro del tipo Lineal Fraccionaria (LFTPDLFs), se llega aun problema de síntesis basado en PDLFs cuya resolución requiere una cantidadfinita de LMIs. En el trabajo de Ghersin y Sánchez Peña [17], se presenta unaextensión del método de Wu y Dong [46] mediante la ubicación de polos LPV.
Conmutación de Controladores LPV
El método de Ganancias Tabuladas (Gain Scheduling), se basa en su forma empíricamás básica, en el cambio de las ganancias de un control PID aplicado a un deter-minado proceso, de acuerdo a las condiciones de operación de una planta dada.En esta expresión que se menciona, no se dan otras garantías del funcionamientoadecuado del sistema (su estabilidad por ejemplo), que las devenidas de lasimulación o la directa prueba en marcha sobre el proceso.
Como se ha mencionado antes, la literatura que aborda el tema del GainScheduling es vasta, y así también en el tema de conmutación de sistemas tiempoinvariantes (ver Liberzon y Morse [21], Hespanha y Morse [18]).
Por su parte, mientras el control LPV pretendería evitar la necesidad derecurrir a leyes de control lineales conmutadas, surge a veces la necesidad deponer en práctica la conmutación (o “Switcheo”) de controles LPV, posiblemente,por diversas causas. Un ejemplo, es cuando el método LPV no consigue sintetizarun control para todo el conjunto de variación del parámetro P , lo cual obliga aparticionar este último y switchear entre controladores. También puede ocurrirque, aun existiendo un controlador LPV que cubra todo el rango de variacióndel parámetro, el desempeño del mismo sea pobre, caso que ameritaría recurrira la estrategia del Switcheo LPV.
A los fines de establecer comparaciones, se mencionarán dos trabajos rele-vantes sobre el tema de Switching LPV. El primero de ellos es el trabajo de Lu yWu [23]. En este trabajo, se propone el diseño de controladores LPV Switcheados,con el uso de múltiples funciones de Lyapunov como herramienta para garanti-zar la estabilidad del sistema de lazo cerrado. Esta técnica, si bien interesante
[ 5 de julio de 2010 at 14:57 ]
4 introducción
desde el punto de vista teórico, sufre de importantes problemas desde el puntode vista computacional por dos motivos. En primer lugar, su utilización obligaa usar múltiples PDLFs, ya que de lo contrario las condiciones de síntesis noresultan factibles. En segundo lugar, es preciso resolver en forma simultánea elproblema de síntesis para todas las regiones, subconjuntos del rango P , entrelas cuales se pretende switchear. Estas dos cuestiones sumadas, hacen el métodoinviable desde el punto de vista práctico.
El segundo trabajo, en cuyo estudio práctico se basa este Proyecto Final deCarrera, es el de Bianchi y Sánchez Peña [6]. En el mismo, se propone unatécnica de diseño de controles LPV Switcheados, que contrariamente a la de Luy Wu [23], basa sus condiciones para la síntesis de controladores, en una únicafunción cuadrática de Lyapunov (SQLF) para todo el rango P . Por medio dela parametrización de Youla para sistemas LPV (Xie y Eisaka [48]), el diseño esconsiderablemente más simple que con el otro método, en tanto y en cuanto lacarga computacional es mucho menor. Los diseños se realizan en dos etapas,primero consiguiendo una estabilización de la planta para todo el rango devariación del parámetro P y haciendo luego diseños en subconjuntos de P .Desde el punto de vista computacional, no se requiere la resolución simultáneade todas los subconjuntos de P como en el enfoque anterior y además noes preciso usar PDLFs. Más aun, el método no admite el uso de PDLFs. Sibien el enfoque es más simple, este último punto hace el esquema propuesto,potencialmente más conservador. A esto se agrega la posibilidad de que la plantano pueda ser estabilizada en todo el rango de variación del parámetro P por unsolo controlador central LPV.
Anticipando parte de las conclusiones, debe decirse que el método de Bianchi ySánchez Peña [6], genera controladores de más alto orden que los otros métodosmencionados (Becker y Packard [5], Ghersin y Sánchez Peña [16], Wu et al.[47], Lu y Wu [23], Ghersin y Sánchez Peña [17] y otros). También es debidomencionar, que ni el método de Bianchi y Sánchez Peña [6], asi como tampocoel de Lu y Wu [23], hacen alguna consideración de las respuestas transitoriasdebidas a eventos de switcheo, cuando estos tienen lugar. Puede mencionarseentre los trabajos que abordan este problema, al de Lu et al. [24].
Control de Sistemas Rotativos con Suspensión Magnética Activa
El control de cuatro grados de libertad, para sistemas rotativos con suspensiónmagnética activa (AMB – por Active Magnetic Bearings), es un problema que tienenumerosos antecedentes de haber sido abordado con técnicas de Gain Scheduling
[ 5 de julio de 2010 at 14:57 ]

1.2 objetivos 5
(ver Matsumura et al. [26], Wu [45], Lu et al. [22], Ghersin et al. [14, 15], Ghersin[13] y otros allí citados).
En el trabajo de Matsumura et al. [26], se resuelve el problema utilizandotécnicas de control robusto LTI, con el agregado de filtros eliminabanda defrecuencia adaptada a la velocidad de rotación de la máquina. La estabilidad yperformance se evalúa mediante simulaciones y experiencias.
En Ghersin et al. [14] se hace uso de técnicas LPV alla Becker y Packard [5],llegando hasta pruebas en simulación y sin llegar a la implementación porproblemas numéricos. En Ghersin et al. [15], se lleva a cabo la implementaciónde los controles sintetizados gracias al uso del método LPV con ubicación depolos.
En Ghersin [13], se utiliza el método LPV con FBMs llegando a la imple-mentación de un control Switcheado LPV. Esto último, hecho de manera ad-hoc,sin soporte teórico para la estabilidad y performance del sistema, da pie alpresente trabajo.
Por su parte, Wu [45] muestra un diseño mediante simulaciones de un controlLPV Switcheado. Lu et al. [22], llevan a cabo un diseño por realimentación deestados observados LPV, con énfasis en la identificación del sistema medianteuna red neuronal artificial (ANN).
A partir de los trabajos mencionados puede decirse que
1. El problema en sí, no presenta no-linealidades duras, y su dinámica espropicia para ser abordada por técnicas lineales.
2. La velocidad de rotación de los sistemas en cuestión son claramente elparámetro LPV del problema.
3. Es un problema que, debido al potencialmente amplio rango de veloci-dades que puede presentarse, eventualmente requerirá de una estrategiaSwitcheada.
Presentados estos antecedentes, se procede a los objetivos del Proyecto.
1.2 objetivos
El objetivo de este Proyecto Final de Carrera para obtener el grado de Ingenierosen Automatización y Control Industrial de la Universidad Nacional de Quilmes,es desarrollar un estudio de nivel avanzado del estado del arte actual de lastécnicas de control LPV. El énfasis está puesto en los aspectos prácticos delproblema y más aun, en la cuestión de la utilización de técnicas de conmutación,con el fin de extender la validez práctica del control LPV.
[ 5 de julio de 2010 at 14:57 ]
6 introducción
Se utiliza como plataforma experimental, el módulo académico de suspensiónmagnética activa MBC500, con el fin de mejorar los resultados obtenidos en eltrabajo de Ghersin [13], mediante la utilización de los métodos propuestos porBianchi y Sánchez Peña [6].
Se buscará poner en práctica estos algoritmos y hacer un desarrollo quepermita sacar conclusiones sobre las ventajas y desventajas de los métodosmencionados, desde el punto de vista práctico especialmente. Se tomará comomodelo de estudio, el libro editado por Sánchez Peña et al. [39], en el cualel enfoque apunta a relevar qué problemas aparecen en la práctica y no sonabordados por la teoría, y en qué aspectos se aparta la teoría de la práctica.
1.3 contribuciones
Las contribuciones del trabajo al avance del control LPV y al control de sistemasde suspensión magnética activa están dadas por:
1. La prueba en la práctica de la técnica de Bianchi y Sánchez Peña [6],constituye un aporte sin precedentes, teniendo en cuenta lo novedoso de lamisma.
2. La mejora de los resultados experimentales obtenidos por Ghersin [13], esmuy sustancial, lo cual constituye uno de los aportes más importantes deltrabajo.
3. Las conclusiones que se extraen respecto de varios aspectos de las técnicasestudiadas son de gran importancia para su mejoramiento.
1.4 organización del informe
En el Cap. 2, se lleva a cabo la exposición de los temas de control LPV y LPVSwitcheado en base a los cuales se desarrollan los controles en el problema prácticodel Cap. 3. Esencialmente, se desarrollan, explican y detallan los resultados deBecker y Packard [5], Ghersin y Sánchez Peña [16], Xie y Eisaka [48] y Bianchi ySánchez Peña [6]. El Cap. 3, está dedicado al re-diseño del sistema de controlLPV Switcheado para el módulo académico de suspensión magnética MBC500.El re-diseño se propone a partir de la solución desarrollada en Ghersin et al.[15], con algunos cambios y la inclusión del Switcheo, que permiten mejorar eldesempeño de manera muy significativa. En este Cap., se detallan aspectos delmodelado e identificación del sistema, los cuales están esencialmente tomadosde Ghersin et al. [14]. Las conclusiones elaboradas se vuelcan en el Cap. 4.
[ 5 de julio de 2010 at 14:57 ]

2C O N T R O L L P V
2.1 gain scheduling y control lpv
El Gain Scheduling es una técnica que ha sido extensamente usada en el diseñode sistemas de control en el pasado (ver [36, 37] y las referencias allí). Con el finde presentar esta técnica, supóngase que se tiene un sistema dinámico modeladoa través de la siguiente ecuación no lineal:
x(t) = f [x(t), u(t), θ(t)] . (2.1)
Se define al sistema anterior como un sistema dependiente del parámetro,considerando que la ecuación de estado depende del tiempo “t” a través delvector de parámetros θ(t), el cual es desconocido a priori, pero que puede sermedido en tiempo real. Para una trayectoria del parámetro θ, la ecuación (2.1)se convierte en el modelo de un sistema de tiempo variante. Igualmente, si latrayectoria paramétrica admisible es constante, dicha ecuación pasa a representarel modelo de un sistema de tiempo invariante. La figura 2.1 resume las relacionesexistentes entre las tres clases de sistemas lineales.
Siendo x(t) ∈ Rn, u(t) ∈ Rnu y θ(t) ∈ Rs el gain scheduling clásico consiste enefectuar el grillado del espacio real Rn×Rnu ×Rs. En cada punto de la grilla, selleva a cabo una linealización sobre la ecuación (2.1) y se diseña un controladorLineal de Tiempo Invariante (LTI). A medida que el sistema evoluciona enRn ×Rnu ×Rs, la técnica de gain scheduling switchea entre los controladores,válidos en un entorno de los puntos de linealización, según sea el punto en elque se está.
El diseño y la implementación de este tipo de estrategia de control, implicauna simulación intensiva en orden de establecer, empíricamente, dos aspectosimportantes con respecto a la respuesta del sistema a lazo cerrado. El primero deellos es su estabilidad y el segundo, la máxima velocidad de cambio entre puntosde operación, considerando que los controladores solo garantizan estabilidadlocal.
Por el contrario, la teoría de control LPV permite llevar a cabo el análisis deestabilidad y performance para este tipo de sistemas lineales, cuyas matrices
7
[ 5 de julio de 2010 at 14:57 ]

8 control lpv
constanteTiempo
Trayectoriafija
θ(t) = θ(t)
Parámetroconstanteθ(t) = θ0
LPV
LTI LTVt = t0
Figura 2.1: Relaciones entre los modelos lineales.
de estado dependan del parámetro θ(t), el cual varía en un conjunto compactoP ⊂ Rs.
Este capítulo, en el cual se desarrolla la teoría utilizada luego en el ejemplode aplicación del capítulo 3, se divide en dos partes. La primera, esencialmentetomada de Ghersin [13], está basada en el trabajo clásico sobre la teoría decontrol LPV (Becker y Packard [5], Wu et al. [47]). En Becker y Packard [5] laestabilidad y la performance de sistemas LPV son establecidas por métodos desíntesis y análisis, basados en funciones de Lyapunov cuadráticas. Aunque esteacercamiento es esencialmente conservativo, por el tipo de función de Lyapunoven el cual está basado, sigue siendo atractivo en la medida que da solucionesmuy simples y computables, similares a las encontradas en Gahinet y Apkarian[11] para control H∞.
El trabajo de Wu et al. [47] (en cierto modo una continuación del trabajo deBecker y Packard [5]), basa su estudio de performance y estabilidad de sistemasLPV en funciones de Lyapunov dependientes del parámetro (PDLFs), que es unacercamiento, potencialmente, menos conservativo.
La segunda parte está basada en los trabajos de Xie y Eisaka [48] y de Bianchiy Sánchez Peña [6]. En Xie y Eisaka [48] se propone un método de diseño desistemas de control LPV basado en la parametrización de todos los controladoresestabilizantes. Esto se logra a través de la extensión a sistemas LPV, de los con-ceptos de factorización coprima doble y de parametrización de Youla, definidospara sistemas LTI. Con ideas similares a las establecidas en Xie y Eisaka [48], eltrabajo de Bianchi y Sánchez Peña [6] presenta un nuevo enfoque en el diseñode controlares LPV switcheados, que permite alcanzar mejores resultados deperformance sin comprometer la estabilidad global del sistema.
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 9
En este capítulo primero se presenta una condición de análisis basada enuna PDLF. La manera en que esta condición cambia para una única funciónde Lyapunov (SQLF), se muestra después de acuerdo al enfoque de Becker yPackard [5]. Luego se presenta un teorema de síntesis, el cual es una extensiónde la condición de síntesis del control H∞ expuesto en Gahinet y Apkarian[11], y un corolario del mismo para sistemas LPV afines, cuyo conjunto devariación del parámetro es un politopo compacto en Rs. Este corolario es unade las herramientas usadas para la síntesis del controlador del sistema MBC500
por su atractivo en la práctica, al brindar condiciones basadas en un problemade factibilidad, con un número finito de LMIs. La primera parte concluye conextensiones de esta teoría hacia condiciones de ubicación de polos siguiendo laslíneas de Chilali y Gahinet [9], pero para sistemas LPV (ver también Ghersin ySánchez Peña [16]).
Posteriormente, dentro de lo que sería la segunda parte de este capítulo, sedefine la parametrización de Youla para sistemas LTI, extendiéndose luego asistemas LPV, con un comentario especial para aquellos que son politópicos.A continuación, se plantean las condiciones necesarias y suficientes para laparametrización de todos los controladores estabilizantes y se propone un méto-do de diseño del parámetro de Youla, basado en una estrategia sistemática deH∞, para lograr performance sobre la ganancia L2. Finalmente, luego de definirel concepto básico de un sistema LPV switcheado, estas ideas son aplicadasal diseño de controladores, permitiendo descomponerlos en dos etapas. Laprimera, enfocada en asegurar la estabilidad global y la segunda, en lograr lasespecificaciones de performance locales. Esta estrategia, que es la empleada enla síntesis de los controladores del capítulo 3, permite asegurar la estabilidaddurante el switcheo, sin restricciones sobre el cambio entre controladores, através de condiciones convexas.
2.2 preliminares
Definición 2.1 (Conjuntos P y V). Sea P un conjunto compacto y V un hipercubo,ambos contenidos en Rs con V definido como:
V =
{ν ∈ Rs, ν =
[ν1, ν2, . . . , νs
]T, |νi| ≤ νi
}
con ν =[ν1 ν2 . . . νs
]T∈ Rs y νi > 0.
[ 5 de julio de 2010 at 14:57 ]

10 control lpv
Definición 2.2 (Conjunto de trayectorias del parámetro F νP ). El conjunto de
trayectorias del parámetro se define como
F νP = {θ =
[θ1, θ2, . . . , θs
]Tθ ∈ C1(R+, Rs) : θ(t) ∈ P ,
θ(t) ∈ V , ∀t ∈ R+, i = 1, 2, ..., s}. (2.2)
con R+ siendo el intervalo [0, ∞) y C1(R, Rs), el conjunto de las funciones realescontinuas y diferenciables con imagen en Rs.
Definición 2.3 (Sistema LPV). Las siguientes cuatro funciones matriciales representanun sistema LPV n dimensional:A : Rs → Rn×n
B : Rs → Rn×nd
C : Rs → Rne×n
D : Rs → Rne×nd .Sea θ ∈ F ν
P una trayectoria específica, la dinámica del sistema evoluciona de acuerdocon la siguiente ecuación estado:x
e
=
A(θ) B(θ)C(θ) D(θ)
x
d
(2.3)
con x(t) ∈ Rn, e(t) ∈ Rne y d(t) ∈ Rnd .
Dada una trayectoria θ, Gθ
Gθ ≡
A(θ) B(θ)C(θ) D(θ)
(2.4)
denota el sistema Lineal de Tiempo Variante (LTV) cuya dinámica evolucionacomo describe la ecuación (2.3). Para condiciones iniciales nulas, con Φ(t, t0)
la correspondiente matriz de transición del sistema de la ecuación (2.3), Gθ
representa un operador lineal como sigue:
Gθ :L2 → L2
e =Gθd (2.5)
e(t) =∫ t
t0
C(θ(τ))Φ(τ, t0)B(θ(τ))d(τ)dτ + Dd(t).
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 11
A partir de estas definiciones, el sistema LPV es definido como el conjunto desistemas LTV que lo generan:
GF νP= {Gθ : θ ∈ F ν
P}.
Estabilidad θ-cuadrática
Considere ahora la dinámica LPV sin entrada:
x = A(θ)x x(0) = x0 (2.6)
con θ ∈ F νP . Se define la función de Lyapunov cuadrática dependiente del
parámetro V(x) = xTX (θ)x con X (z) ∈ Sn×n, X (z) > 0 para todo z ∈ P .Para cualquier θ ∈ F ν
P , sea x(t) una trayectoria de (2.6), y sea v(t) = V(x(t)) lafunción de Lyapunov evaluada sobre el parámetro, la derivada de v con respectoal tiempo estará dada por:
v = xT
[AT(θ)X (θ) +X (θ)A(θ) +
s
∑1
θi∂X (θ)
∂θi
]x.
Se ha obviado la dependencia de v, x y θ con respecto al tiempo para hacer másclara la lectura.
Definición 2.4 (Estabilidad θ-cuadrática). La función A es θ-cuadráticamente establesobre Pν (o θ-QS sobre Pν) si existe una función matricial X : Rs 7→ Sn×n, tal quepara todo θ ∈ P ⊂ Rs y para todo θ ∈ V , con θ =
[θ1 θ2 . . . θs
], la siguiente
desigualdad matricial se satisface:
AT(θ)X (θ) +X (θ)A(θ) +s
∑1
θi∂X∂θi
< 0.
Se puede demostrar (Wu et al. [47]), que si la última desigualdad se satisface,el sistema (2.6) es exponencialmente estable para cualquier θ ∈ F ν
P .Dado el operador lineal definido por un sistema LTV (ver ecuación (2.5)), y
considerando la definición estándar de una norma L2 inducida para un operador,se establece la norma del supremo sobre todas las trayectorias del parámetrocomo herramienta para evaluar la performance de los sistemas LPV. Bajo estasideas, se define primero la norma de un sistema LPV.
[ 5 de julio de 2010 at 14:57 ]

12 control lpv
Definición 2.5 (Norma de un sistema LPV). La norma de un sistema LPV θ-QS sedefine como
‖GPν‖ = sup
θ∈F νP
sup‖d‖2=1
‖Gθ.d‖2.
A continuación, se presenta un lema que da una condición de análisis sufi-ciente para la estabilidad y performance de sistemas LPV en base a una PDLF.
Lema 2.6. [BRL para sistemas LPV] Sea P ⊂ Rs un conjunto compacto y {ξi}s1 un
conjunto de números no negativos. Si existe una función continuamente diferenciableX : Rs 7→ Rn×n, con X (θ) simétrica y definida positiva para todo θ ∈ P , y además secumple la siguiente desigualdad matricial
AT(θ)X (θ) +X (θ)A(θ) + ∑s1 νi
∂X∂θiX (θ)B(θ) CT(θ)
BT(θ)X (θ) −γI DT(θ)
C(θ) D(θ) −γI
< 0 (2.7)
para todo θ ∈ P y para todo |νi| ≤ ξi, con i = 1, 2, . . . , s, entonces el sistema LPV GPν
es θ-QS. Además ‖GPν‖ < γ.
Demostración. Ver [47].
2.2.1 Problema de síntesis
Se comienza presentando la forma de la planta LPV y del controlador, paraluego poder efectuar las correspondientes referencias.
Definición 2.7 (Planta LPV). Sea la planta G un sistema dinámico LPV n dimensionalfinito, el cual mapea entradas externas de perturbación “w” y fuerzas de control “u” asalidas de performance “z” y de mediciones “y”, cuya dinámica en variables de estadoestá regida por la siguiente ecuación:
Gol(θ(t))x(t)
z(t)
y(t)
=
︷ ︸︸ ︷A(θ(t)) B1(θ(t)) B2(θ(t))
C1(θ(t)) D11(θ(t)) D12(θ(t))
C2(θ(t)) D21(θ(t)) D22(θ(t))
x(t)
w(t)
u(t)
(2.8)
donde θ(t) ∈ P , x, x ∈ Rn , w ∈ Rnw es la perturbación, z ∈ Rnz es la salidacontrolada, u ∈ Rnu es la fuerza de control e y ∈ Rny es la medición para el control.
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 13
Suposición 2.8. Sin pérdida de generalidad se asume que la matriz D22 es cero, condi-ción que es fácilmente salvable mediante técnicas de loop shifting (ver [4]).
Definición 2.9 (Controlador LPV). La clase de controladores LPV que interesan sonde la forma
K(θ(t), θ(t)) (2.9)xk(t)
u(t)
=
︷ ︸︸ ︷Ak(θ(t), θ(t)) Bk(θ(t), θ(t))
Ck(θ(t), θ(t)) Dk(θ(t), θ(t))
xk(t)
y(t)
(2.10)
donde xk ∈ Rnk es el estado del controlador.
En lo que sigue, a fin de evitar sobrecargar la notación, se usarán las letrascaligráficas para matrices dependientes del parámetro, mientras que las regularesserán usadas en aquellas que no lo sean.
Suposición 2.10. Se asume que la terna dependiente del parámetro (A,B2, C2) esestabilizable y detectable para todo θ ∈ F ν
P , lo cual garantiza la existencia de uncontrolador LPV, por realimentación de salida, estabilizante. (ver Becker y Packard[5], Wu et al. [47]).
problema de performance-γ
Dada una planta LPV como la presentada en la definición 2.7, el problema decontrol de performance-γ busca un controlador, como el de la definición 2.9, talque para el sistema a lazo cerrado dado por
GclPν≡
Acl(·) Bcl(·)
Ccl(·) Dcl(·)
(2.11)
con
Acl =
A+ B2DkC2 B2Ck
BkC2 Ak
Bcl =
B1 + C2DkD21
BkD21
Ccl =
[C1 +D12DkC2 D12Ck
]Dcl =D11 +D12DkD21
[ 5 de julio de 2010 at 14:57 ]

14 control lpv
el siguiente análisis LMI tenga soluciónAT
clX∞ +X∞Acl + ∑s1 νi
∂X∞∂θi
X∞Bcl CTcl
BTclX∞ −γI DT
cl
Ccl Dcl −γI
< 0
para alguna función matricial X∞ : Rs → R(n+nk)×(n+nk), con X∞(θ) > 0 ∀θ ∈ P .De acuerdo al lema 2.6, si esta función existe, el sistema a lazo cerrado es θ-QS y‖GclPν‖ < γ (ver Fig. 2.2).
w
u
z
y
KP
GP
Figura 2.2: Interconexión en forma lineal fraccional entre la planta y el controlador.
Solución General
El siguiente teorema es adaptado de [2]:
Teorema 2.11 (Condiciones de Solubilidad Proyectadas). Considere la planta LPVde la definición 2.7 con θ ∈ F ν
P . Existe un controlador gain-scheduling por reali-mentación de salida, como el presentado en la definición 2.9, que fuerza la estabilidadinterna, y una cota γ sobre la ganancia L2 del sistema a lazo cerrado (2.8) y (2.10),siempre que existan S y R, funciones matriciales simétricas y definidas positivas, talque las siguientes condiciones LMI:
−
R I
I S
≤ 0 (2.12)
N TS
ATS + SA+ S SB1 CT
1
BT1 S −γI DT
11
C1 D11 −γI
NS < 0 (2.13)
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 15
N TR
AR+RAT − R RCT
1 B1
C1R −γI D11
BT1 DT
11 −γI
NR < 0 (2.14)
con
NS =ker[C2 D21
]NR =ker
[BT
2 DT12
]NS =
NS 0
0 I
NR =
NR 0
0 I
.
se verifiquen para todo θ ∈ P y θ ∈ V .
Demostración. Ver [44].
Solución Clásica
Este problema fue establecido en Wu et al. [47], donde se lo definió y resolviócomo el problema de síntesis LPV de variación-ξ y performance-γ.
El trabajo de Becker y Packard [5], el cual es anterior al de Wu et al. [47], essimilar a este último en lo que respecta a las manipulaciones algebraicas queson realizadas para derivar las LMIs de síntesis, comenzando desde una LMI deanálisis de lazo cerrado. El hecho que sea usada una SQLF como V(x) = xTX∞x,con X∞ una matriz constante, permite a este acercamiento, no hacer uso deninguna cota sobre la máxima velocidad de cambio del parámetro, técnicamentepermitiendo que las trayectorias del mismo sean simplemente continuas portramos. El aspecto atractivo de tal función de Lyapunov es que resulta másfácilmente tratable desde el punto de vista del cálculo del controlador, que conel enfoque PDLF. Como se mostrará en el corolario 2.15, si la dependencia delas matrices de estado de la planta aumentada a lazo abierto es afín con elparámetro, y si el conjunto compacto P es un politopo definido por un númerofinito de vértices, la síntesis de los controladores LPV puede llevarse a caboresolviendo un problema de factibilidad con un número finito de LMIs.
Las manipulaciones algebraicas que se utilizan para obtener las LMIs desíntesis, son similares a las que se encuentran en [11] para sistemas LTI, para locual es necesario restringir las matrices B2, C2, D12 y D21 de la planta aumentadaa lazo abierto a ser constantes. Esto no implica una restricción muy seria, dadoque puede ser superada a través de un filtro pasa bajo a la entrada o salida de laplanta, a expensas de incrementar su número de estados ([12]).
[ 5 de julio de 2010 at 14:57 ]

16 control lpv
En la siguiente subsección, se presenta el teorema de síntesis que sigue delenfoque de [12], como una de las herramientas utilizadas para el diseño delcontrolador del magnetic bearing en el capítulo 3.
2.2.2 Análisis con una única función de Lyapunov
Estabilidad Cuadrática
Considere ahora el sistema LPV sin entrada de la ecuación (2.6). Se restringela función de Lyapunov V a la forma V(x) = xTXx, pero en este caso, siendoX ∈ Rn×n una matriz constante, simétrica y definida positiva. Para cualquierθ ∈ F ν
P , con x(t) una trayectoria de (2.6), v(t) = V(x(t)) representa nuevamenteel funcional V evaluado sobre la trayectoria. La derivada de v respecto al tiempoes en consecuencia
v = xT[AT(θ)X + XA(θ)]x.
A continuación se definirá “estabilidad cuadrática” como la condición de estabil-idad basada sobre una SQLF.
Definición 2.12. La función A es cuadráticamente estable sobre P (o QS sobre P) siexiste una matriz real X ∈ Rn×n, con X = XT > 0, tal que para todo θ ∈ P ⊂ Rs lasiguiente la desigualdad
AT(θ)X + XA(θ) < 0
se satisface.
Debe señalarse que la restricción a una SQLF, es un caso particular del lema2.6 que origina, en la correspondiente LMI, la desaparición de la condición sobrela derivada de X . Esto da lugar a una condición de estabilidad y performancefuerte, dado que acepta trayectorias del parámetro discontinuas.
2.2.3 Presentación del Problema de Control
Aquí se repite lo expuesto en la sección 2.2.1. La planta G es un sistema LPVdinámico n dimensional como en la definición 2.7, que mapea entradas externasde perturbación “w” y fuerzas de control “u” a salidas de performance “z” yde mediciones “y”. Se mantiene la suposición 2.8 (D22 = 0) al igual que lasiguiente.
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 17
Suposición 2.13. Se supone que las matrices B2, C2, D12 y D21 son constantes paraconvexidad.
Sea θ la trayectoria del parámetro con θ ∈ F νP . El problema de control LPV
de performance-γ, limitado a una SQLF, consiste en encontrar un controladorLPV, como el de la definición 2.9, tal que para el sistema a lazo cerrado de laecuación (2.11) el siguiente análisis LMI,
ATclX∞ + X∞Acl(θ) X∞Bcl(θ) CT
cl(θ)
BTcl(θ)X∞ −γI DT
cl(θ)
Ccl(θ) Dcl(θ) −γI
< 0 (2.15)
sea factible para alguna matriz simétrica X∞ ∈ R(n+nk)×(n+nk), con X∞ > 0. Porel teorema de análisis, si existe tal matriz, el sistema a lazo cerrado es QS y‖GclPν‖ < γ.
2.2.4 Solución del problema de performance-γ limitado a una SQLF
Corolario 2.14. Sean NR y NS definidas como en el teorema 2.11. Se restringen lasfunciones S yR a que sean constantes, i.e., si existen dos matrices simétricas y definidaspositivas, R y S ∈ Rn×n tal que las LMIs (2.12), (2.13) y (2.14) se satisfagan paratodo θ ∈ P , entonces existe un controlador LPV como el de la definición 2.9, tal que elsistema a lazo cerrado Gcl
Pνes QS. Más aún, ‖Gcl
Pν‖ < γ.
Demostración. Ver Gahinet y Apkarian [11].
Comentarios sobre la demostración. En Gahinet y Apkarian [11], la equiva-lencia entre la LMI (2.15) y el sistema de LMIs (2.12), (2.13) y (2.14) se pruebapara el caso LTI, i.e. para cada punto P , lo cual resulta suficiente para el lema deanálisis.
En Becker y Packard [5], se señala lo siguiente para el caso SQLF: Las LMIs(2.12), (2.13) y (2.14) son condiciones convexas sobre las matrices R y S. Másaún, dado que la dependencia de estas desigualdades sobre θ ∈ P es continua,la solución al problema LPV de performance-γ termina siendo un problema defactibilidad LMI convexo con un número infinito de condiciones (producto que Pes infinito). El típico enfoque utilizado, con el fin de obtener una aproximaciónfinita a este problema con un número infinito de condiciones, es grillar elconjunto P . Si no se puede encontrar una solución sobre una grilla finita deP , es claro que no existirá solución para todo P , pero por contrario, si existesolución, no hay garantía que sea válida para todo P . En este caso, el enfoque
[ 5 de julio de 2010 at 14:57 ]

18 control lpv
práctico intenta resolver el problema en una grilla densa de P , aunque se debetener en cuenta que a medida que el número de parámetros crece, el número depuntos en la grilla aumenta de manera exponencial. En Becker y Packard [5], seseñala que para obtener un resultado razonable, no deben existir más de cuatroparámetros, i.e., θ ∈ P ⊂ R4.
2.2.5 Sistemas Afines
Como se anticipó previamente, condiciones adicionales dan un problema defactibilidad convexa con un número finito de LMIs. De hecho, este es el caso, siel conjunto P se limita a un politopo convexo con un número finito de vértices,y si la dependencia de las matrices de estado de la planta a lazo abierto, es afínsobre el parámetro. Esto quiere decir que la correspondiente matriz del sistema,Gol(θ) en la ecuación (2.8), depende del parámetro de la siguiente forma:
Gol(θ) = Ga0ol + θ1Ga1
ol + . . . + θsGasol
θ(t) ∈ Θ = Co{θ1, . . . , θp}
siendo Co la cáscara convexa del conjunto de vértices que definen P y, constanteslas matrices del sistema Gai
ol .El sistema LPV en forma afín puede ser equivalentemente dado por los
“sistemas vértices”, i.e. por las imágenes de los p vértices que forman el conjuntoP ,
Gol(θ(t)) ∈ Co{Gp1ol , . . . , Gpp
ol }Gpi
ol = Gol(θi) i = 1, . . . , p
de una manera tal que para todo t, el sistema matricial pueda ser expresadocomo
Gol(θ(t)) =p
∑1
Gpiol ηi(t) con (2.16)
θ(t) =p
∑1
θiηi(t) yp
∑1
ηi(t) = 1.
[ 5 de julio de 2010 at 14:57 ]
2.2 preliminares 19
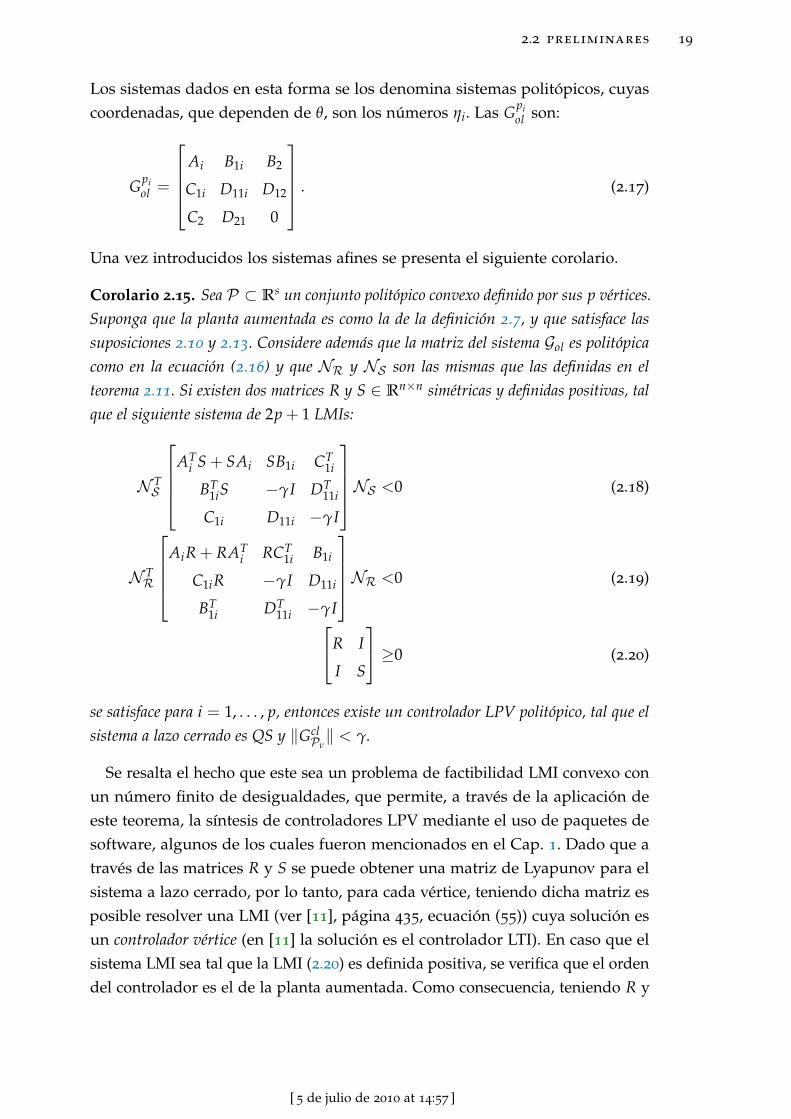
Los sistemas dados en esta forma se los denomina sistemas politópicos, cuyascoordenadas, que dependen de θ, son los números ηi. Las Gpi
ol son:
Gpiol =
Ai B1i B2
C1i D11i D12
C2 D21 0
. (2.17)
Una vez introducidos los sistemas afines se presenta el siguiente corolario.
Corolario 2.15. Sea P ⊂ Rs un conjunto politópico convexo definido por sus p vértices.Suponga que la planta aumentada es como la de la definición 2.7, y que satisface lassuposiciones 2.10 y 2.13. Considere además que la matriz del sistema Gol es politópicacomo en la ecuación (2.16) y que NR y NS son las mismas que las definidas en elteorema 2.11. Si existen dos matrices R y S ∈ Rn×n simétricas y definidas positivas, talque el siguiente sistema de 2p + 1 LMIs:
N TS
AT
i S + SAi SB1i CT1i
BT1iS −γI DT
11i
C1i D11i −γI
NS <0 (2.18)
N TR
AiR + RAT
i RCT1i B1i
C1iR −γI D11i
BT1i DT
11i −γI
NR <0 (2.19)
R I
I S
≥0 (2.20)
se satisface para i = 1, . . . , p, entonces existe un controlador LPV politópico, tal que elsistema a lazo cerrado es QS y ‖Gcl
Pν‖ < γ.
Se resalta el hecho que este sea un problema de factibilidad LMI convexo conun número finito de desigualdades, que permite, a través de la aplicación deeste teorema, la síntesis de controladores LPV mediante el uso de paquetes desoftware, algunos de los cuales fueron mencionados en el Cap. 1. Dado que através de las matrices R y S se puede obtener una matriz de Lyapunov para elsistema a lazo cerrado, por lo tanto, para cada vértice, teniendo dicha matriz esposible resolver una LMI (ver [11], página 435, ecuación (55)) cuya solución esun controlador vértice (en [11] la solución es el controlador LTI). En caso que elsistema LMI sea tal que la LMI (2.20) es definida positiva, se verifica que el ordendel controlador es el de la planta aumentada. Como consecuencia, teniendo R y
[ 5 de julio de 2010 at 14:57 ]
20 control lpv
S, se puede hacer un cálculo directo con los controladores vértices sin resolverninguna LMI.
Para todo t, si se obtiene el parámetro θ en tiempo real, y por lo tanto, susηi coordenadas politópicas, las matrices de estado del controlador LPV sonobtenidas como combinación convexa de los controladores vértices, permitiendola siguiente implementación:
θ(t) =p
∑1
ηi(t)θi
K(θ(t)) =p
∑1
ηi(t)Ki
siendo Ki los controladores vértice y θi, los vértices de P .Note que la matriz del sistema del controlador K(θ(t)) se actualiza en tiempo
real con la medición del parámetro θ, mientras que los sistemas vértices Ki
son computados fuera de línea. Esta forma de adaptación hace al control LPVatractivo para el gain scheduling.
2.2.6 Ubicación de polos LPV
Como se muestra en Chilali y Gahinet [9], las LMIs permiten establecer condi-ciones sobre la ubicación de los autovalores de matrices cuadradas, pudiendode esta manera establecer problemas de control con objetivos mixtos. La teoríadesarrollada allí para sistemas LTI, trata particularmente problemas de H∞, H2
y ubicación de polos, en forma mixta.En esta subsección se presentará una extensión de este enfoque para sistemas
LPV. Es muy importante aclarar antes de continuar, que en sistemas LPV noexisten cosas tales como polos. Sin embargo, la técnica de agrupamiento deChilali y Gahinet [9] aplicada a dinámicas LPV, ha demostrado su utilidad en untipo particular de problema que, eventualmente, aparece cuando se resuelvencuestiones de control LPV. Este tipo de inconveniente es a menudo referidocomo el problema de los polos rápidos y se describe a continuación.
Suponga que se tiene un sistema LPV dado por la interconexión fraccional deuna planta aumentada GP y su controlador correspondiente KP , con P siendoel conjunto de variación del parámetro (ver Fig. 2.2). Para cada punto en P , elsistema LTI que resulta de mantener fijo el parámetro θ, a veces presenta unnúmero pequeño de polos (dos o cuatro), cuya parte real en módulo es muchomayor que la del resto de los polos a lazo cerrado (la condición de “rápido” conrespecto a un polo depende de la aplicación particular).
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 21
Los polos rápidos traen dos problemas desde el punto de vista práctico, ambosrelacionados con la integración numérica de una ecuación diferencial con estadoslentos y rápidos. Tanto para la fase de simulación, como para la implementacióndigital del controlador, la integración es necesaria y se torna dificultosa con estasdinámicas rápidas.
El enfoque usado para tratar con estas dificultades es el de ubicación de polosLPV. A través de condiciones LMI, el objetivo es hacer que los polos de cadasistema a lazo cerrado LTI, resultante de mantener el parámetro fijo en cadapunto de su conjunto de variación, se encuentren en una región prescripta delplano complejo.
Condiciones de análisis
Se comienza con las definiciones de región LMI y estabilidad-D de una funciónmatricial.
Definición 2.16. Región LMI Una región en el plano complejo D, es llamada unaRegión LMI, si existe una matriz simétrica α = [αkl] ∈ Rm×m y una matriz β =
[βkl] ∈ Rm×m, tal que
D = {z ∈ C : fD(z) < 0}
con
fD(z) = α + zβ + zβT = [αkl + βklz + βlk z]1≤k,l≤m. (2.21)
Puede encontrarse una discusión más detallada en [9]. Se debe señalar queestas regiones son un subconjunto denso del conjunto de regiones del planocomplejo, simétricas respecto del eje real. A continuación, se presenta la defini-ción de estabilidad-D y un lema el cual da una condición LMI para chequeardicha estabilidad en una matriz cuadrada.
Definición 2.17. Una matriz A ∈ Rn×n es D-estable si y sólo si sus autovalores estánen una región LMI D.
Lema 2.18. Una matriz A ∈ Rn×n es D-estable si y sólo si existe una matriz simétricadefinida positiva XD, tal que la siguiente matriz de m×m es definida negativa:{[
αklXD + βkl AXD + βlkXDAT]
1≤k,l≤m
}< 0.
Demostración. Ver [9].
[ 5 de julio de 2010 at 14:57 ]

22 control lpv
Ahora se presenta un lema para la estabilidad-D de una función matricialA : P ⊂ Rs → Rn×n en cada punto de P .
Lema 2.19. Una función matricial A : P ⊂ Rs → Rn×n es D-estable para todo θ ∈ Psi existe una función matricial XD : P ⊂ Rs → Rn×n, con XD(θ) simétrica y definidapositiva para cada θ ∈ P , tal que{[
αklXD(θ) + βklA(θ)XD(θ) + βlkXD(θ)A(θ)T]
1≤n,m≤n
}< 0 ∀θ ∈ P .
Demostración. Aplicación directa del lema previo.
Se puede apreciar que este lema da una condición de análisis, en base a LMIs,para la dinámica de un sistema LPV. Con esto en mano y con un conjunto decotas para la velocidad de variación del parámetro, los aspectos asociados a lafase de implementación, pueden ser evaluados como el tiempo de muestreonecesario para el controlador digital. En el siguiente párrafo se presenta elproblema de performance-γ con ubicación de polos.
Sea D una región del semiplano izquierdo abierto del plano complejo (2.21)y sea γ un número positivo. Dada la planta LPV de la definición 2.7, se buscaun controlador LPV como el de la definición 2.9, tal que su interconexióncon la planta genere un sistema a lazo cerrado como el de la ecuación (2.11).Si hay un controlador de tal manera que existan dos funciones matricialesX∞ : Rs → R(n+nk)×(n+nk) y XD : Rs → R(n+nk)×(n+nk) a fin que para todoθ ∈ P las siguientes LMIs
ATclX∞ +X∞Acl + ∑s
1 νi∂X∞∂θi
X∞Bcl CTcl
BTclX∞ −γI DT
cl
Ccl Dcl −γI
< 0
{[αklXD + βklAcl(θ)XD + βlkXDAT
cl
]1≤n,m≤n
}< 0, (2.22)
se satisfagan, entonces el sistema a lazo cerrado es θ-QS con su norma menorque γ. Más aún, el sistema a lazo cerrado es D-estable para todo θ ∈ P .
Teorema 2.20 (Caracterización LPV Básica con Asignación de Autovalores).Considere la planta LPV de la definición 2.7, con trayectorias en F ν
P . Sea D una regiónLMI en el semiplano izquierdo abierto del plano complejo, con su función característicacomo en la ecuación (2.21). Al basarse sobre las condiciones de análisis dadas por las
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 23
LMIs (2.22), cuando se pasa de dichas condiciones a las de síntesis, se impone que, (ver[9])
X∞ : Rs → R(n+nk)×(n+nk) y XD : Rs → R(n+nk)×(n+nk)
estén limitadas a la misma matriz funcional,
Xcl(θ) := X∞(θ) = XD(θ) ∀θ ∈ P .
Las matrices Xcl y X−1cl están divididas en bloques como sigue
Xcl =
R MMT U
, X−1cl =
S NN T V
.
La división de arriba es válida si y sólo si se puede llevar a cabo la siguiente factorización:
I − SR = NMT.
Con el fin de derivar condiciones de síntesis, se propone que las matrices del controladorAk, Bk y Ck, dependan de un conjunto de variables nuevas Ak Bk Ck, S , R,M y Nde la siguiente manera:
Ak =N−1 (f)M−T con (2.23)
f =Ak − S (A−B2DkC2)R− BkC2R−SB2Ck+ (2.24)
SR+NMT
Bk =N−1(Bk − SB2Dk
)Ck =
(Ck −DkC2S
)M−T.
Se mantiene la suposición 2.8 y además se supone que existen las funciones matricialessimétricas y definidas positivas S y R, mencionadas anteriormente. Considere también
[ 5 de julio de 2010 at 14:57 ]
24 control lpv
que existen las funciones matriciales dependientes del parámetro Ak, Bk, Ck, Dk, con unnúmero real positivo γ, tal que las siguientes condiciones LMI:
−
R I
I S
< 0 (2.25)
αkl
R I
I S
+ βklΦ + βlkΦT
kl
< 0 con k, l = 1, . . . , m (2.26)
Ψ =
Ψ11 ΨT21
Ψ21 Ψ22
< 0 (2.27)
son satisfechas para todo θ ∈ P , θ ∈ V , con
Φ =
AR+ B2Ck A+ B2DkC2
Ak SA+ BkC2
(2.28)
Ψ11 =
−R+AR+RAT + B2Ck + (B2Ck)T B1 + B2DkD21
(B1 + B2DkD21)T −γI
(2.29)
Ψ21 =
Ak + (A+ B2DkC2)T SB1 + BkD21
C1R+D12Ck D11 +D12DkD21
(2.30)
Ψ22 =
S + SA+ATS + BkC2 + (BkC2)T (C1 +D12DkC2)
T
C1 +D12DkC2 −γI
. (2.31)
Entonces, existe un controlador gain-scheduling por realimentación de salida como el dela definición 2.9, tal que:
1. Se establece la estabilidad interna.
2. γ es la cota sobre la ganancia ldos del sistema a lazo cerrado dado por la inter-conexión de (2.8) con (2.10).
3. Los polos de cada sistema LTI a lazo cerrado, resultantes de todas las trayectoriasen F ν
P cuando el parámetro es constante, están circunscritos a una región LMIprescrita por una función característica como la (2.21).
Demostración. Ver [9, 32].
Comentario 2.21. Debería tenerse en cuenta la observación hecha en [2], acerca deluso de PDLFs con el objetivo de obtener controladores “prácticamente válidos”, i.e.,controladores cuyas matrices de estado no dependan de la velocidad de variación delparámetro (ver tabla I en [2]).
[ 5 de julio de 2010 at 14:57 ]

2.2 preliminares 25
2.2.7 Ubicación de polos basada sobre una SQLF
Al igual que en la sección 2.2.3, se intentará en este caso un enfoque SQLF, enorden de desarrollar una primera solución que sea tratable. Como en el casode pasar del problema de control LPV θ-QS al problema de control LPV QS, ysiguiendo el razonamiento planteado en [9] para sistemas LTI, el problema deanálisis se simplifica forzando las funciones
X∞ : Rs → R(n+nk)×(n+nk) y XD : Rs → R(n+nk)×(n+nk)
a ser la misma matriz constante,
X∞(θ) = XD(θ) = Xcl ∈ R(n+nk)×(n+nk) ∀θ ∈ P .
Considere que se mantienen las suposiciones 2.8 y 2.13 y que las matrices Xcl
y X−1cl son divididas en bloques como antes. Suponga que también es válido
el cambio de variables en las matrices del controlador y note que, al haberrestringido las matrices B2, C2, D12 y D21 a ser constantes (suposición 2.13),la dependencia funcional de las nuevas variables Ak, Bk y Ck, con respecto alparámetro es similar a la de las variables originales Ak, Bk y Ck. Con los sistemasafines en mente, esto significa que si las últimas dependen de manera afín sobreθ, entonces las primeras también lo harán.
Si, como se mencionó en [9] para el caso LTI, M y N son invertibles, dadaslas funciones Ak(·), Bk(·), Ck(·) y Dk(·) con las matrices R y S, el controladorqueda definido de manera única. A continuación, se presenta el corolario desíntesis para norma acotada con ubicación de polos basado sobre una SQLF.
Corolario 2.22. Sea D una región LMI en el semiplano izquierdo abierto del planocomplejo, con su función característica como la de la ecuación (2.21). El problema deperfomance-γ con ubicación de polos tiene una solución basada sobre una SQLF, si elsistema LMI dado por las desigualdades (2.25), (2.26) y (2.27) es factible para algúnconjunto de funciones matriciales Ak, Bk, Ck y Dk, y un par de matrices R y S, paratodo θ ∈ P . R y S son simétricas y definidas positivas en Rn×n.
Como en el caso del problema de control de performance-γ, si las matrices dela planta aumentada a lazo abierto dependen en forma afín sobre θ, y si P es unpolitopo convexo, el problema puede ser indicado en términos de los sistemasvértices que conforman la representación afín. El sistema LMI completo consisteen la LMI (2.27), más la LMI (2.26), la cual tiene m2 bloques por cada vértice,más la LMI (2.25).
[ 5 de julio de 2010 at 14:57 ]

26 control lpv
La solución buscada será en términos de un par de matrices constantes R yS, y también de un conjunto de matrices {Ai, Bi, Ci,Di} por vértice. Dado quela LMI (2.25) es definida positiva, el conjunto de matrices {Ai, Bi, Ci,Di} definedirectamente los controladores vértices que conforman el controlador politópico.
2.3 la parametrización de youla
Al comienzo de esta sección se desarrollará la parametrización de Youla parasistemas LTI y, posteriormente, se mostrará la extensión de esta herramienta asistemas LPV. Dado que en ambos casos se utiliza un enfoque basado en las fac-torizaciones coprimas, se inicia la discusión a través de conceptos fundamentalessobre ellas.
Factorizaciones Coprimas
Definición 2.23. Dadas dos matrices de transferencia Mr y Nr en RH∞, se dice queson coprimas derechas, si existen dos matrices Xr e Yr ∈ RH∞, tal que se verifique lasiguiente identidad de Bezout:
Xr Mr + YrNr = I
De la misma manera Ml y Nl son coprimas izquierdas, si existen Xl e Yl ∈ RH∞, talque:
MlXl + NlYl = I
Comentario 2.24. A partir de las definiciones anteriores, se puede mostrar que si Mr
y Nr tienen un factor derecho común Ur ∈ RH∞ (i.e., Mr = MUr y Nr = NUr),entonces U−1
r ∈ RH∞. La misma propiedad se define para las matrices coprimasizquierdas.
Toda función de transferencia real y propia, puede ser factorizada de lasiguiente manera:
G(s) = N(s)M(s)−1 = M(s)−1N(s),
donde N, M, N y M están en RH∞, con N y M coprimas derechas, y N y Mcoprimas izquierdas. Esto último se conoce como una factorización coprimaderecha e izquierda de G(s), respectivamente (Ver Dullerud y Paganini [10]).
[ 5 de julio de 2010 at 14:57 ]

2.3 la parametrización de youla 27
A continuación, se presenta un lema que permite obtener dichas factoriza-ciones a partir de una realización de G(s) estabilizable y detectable.
Lema 2.25. Sea:
G(s) =
A B
C D
una realización estabilizable y detectable de G(s) y, F y L dos matrices, tal que A + BFy A + LC son Hurwitz. Se verifica entonces que:
M(s)
N(s)
=
A + BF B
F I
C + DF D
(2.32)
y
[N(s) M(s)
]=
A + LC B + LD L
C D I
(2.33)
son las factorizaciones coprimas derecha e izquierda de G(s), respectivamente. Además,puede verse que:
[Xr(s) Yr(s)
]=
A + LC −(B + LD) L
F I 0
(2.34)
y
Yl(s)
Xl(s)
=
A + BF L
F 0
−(C + DF) I
, (2.35)
matrices en RH∞, satisfacen la siguiente relación: Xr(s) Yr(s)
−N(s) M(s)
M(s) −Yl(s)
N(s) Xl(s)
=
I 0
0 I
.
Esta última expresión se denomina una doble factorización coprima de la matriz detransferencia G(s).
Demostración. Ver Dullerud y Paganini [10].
[ 5 de julio de 2010 at 14:57 ]

28 control lpv
-
G(s)
K(s)
u1 e1
y2
y1
e2 u2
Figura 2.3: Lazo de interconexión de planta y controlador para la parametrización deYoula.
Teorema 2.26. Suponga que la planta y el controlador del lazo de realimentación dela Fig. 2.3, admiten las siguientes factorizaciones coprimas: G(s) = N(s)M−1(s) =M−1(s)N(s), K(s) = Nk(s)M−1
k (s) = Mk−1
(s)Nk(s). Asumiendo que el sistema estábien planteado1. , entonces las siguientes afirmaciones son equivalentes:
1. El sistema en realimentación es internamente estable.
2.
M −Nk
N Mk
es invertible en RH∞.
3.
Mk Nk
−N M
es invertible en RH∞.
Demostración. Ver Sánchez Peña y Sznaier [40].
A través del siguiente lema se muestra que, dada una planta G(s) estabiliz-able, existe un controlador estabilizante internamente K0(s) = U0(s)V−1
0 (s) =V−1
0 (s)U0(s), tal que los factores U0, V0, U0 y V0 son precisamente los compo-nentes de un factorización coprima doble de G.
Lema 2.27. Si G(s) es estabilizable y detectable, entonces existen factores coprimosderechos U0, V0 y factores coprimos izquierdos U0, V0 RH∞, tal que: V0 U0
−N M
M −U0
N V0
=
I 0
0 I
.
Más aún, el controlador K0(s) = U0(s)V−10 (s) = V−1
0 (s)U0(s) estabiliza internamenteel lazo.
Demostración. Ver Sánchez Peña y Sznaier [40].
1 Se dice “bien planteado” o well posed, si la función de transferencia de la Fig. 2.3 desde u1 y u2 atodas las salidas y1 , y2, e1 y e2, existe y es propia
[ 5 de julio de 2010 at 14:57 ]

2.3 la parametrización de youla 29
Según este último resultado, si se conoce una doble factorización coprima de laplanta G(s), entonces se tiene, de forma inmediata, un control estabilizante parael lazo de la Fig. 2.3. Más aún, para el sistema en su forma LFT, es posible ver queeste último controlador es un elemento particular del conjunto de controladoresbasados en la realimentación de estados observados, con ganancias L y F delobservador y regulador, respectivamente. A partir de esta idea se propone elsiguiente teorema.
Teorema 2.28. El conjunto de todos los controladores que estabilizan la planta G(s)puede ser parametrizado como:
K(s) = U(s)V−1(s) = V−1(s)U(s)
donde
U = U0 −MQ, V = V0 + NQ
U = U0 −QM, V = V0 + QN.
Q(s) ∈ RH∞ es un parámetro libre y N, M, N, M, U0, V0, U0 y V0 se seleccionanigual que en los lemas y teoremas anteriores.
Demostración. Ver Sánchez Peña y Sznaier [40].
Un caso particular resulta cuando G(s) es estable a lazo abierto. Bajo estacondición se puede tomar M = M−1 = −I, N = N = −G, U0 = U0 = 0 yV0 = V0 = I. Esto implica que se estará tomando como controlador central aK0 = 0. Finalmente se tiene que:
K(s) = Q(I − GQ)−1 = (I −QG)−1Q.
Una vez estudiadas las expresiones tanto para la planta G(s) como para el con-trolador K(s), se puede analizar en este contexto, el sistema a lazo cerrado. Paraello, suponga la planta de la ecuación 2.8 y considere válidas las suposiciones 2.8y 2.13. Al analizar el caso LTI, i.e. manteniendo el parámetro fijo, la transferenciade la señal w a la señal z (ver Fig. 2.2), expresada en su forma LFT, resulta ser:
Fl(G, K) = G11 + G12K(I − G22K)−1G21 (2.36)
[ 5 de julio de 2010 at 14:57 ]

30 control lpv
siendo
G22(s) ≡
A B2
C2 0
(2.37)
la función de transferencia de G(s) entre u e y. Se demuestra que es posiblereescribir la ecuación 2.36 en forma afín al parámetro Q (ver Xie y Eisaka [48]),tal que:
Fl(G, K) = T11 + T12QT21 (2.38)
donde
T11 T12
T21 T22
=
A + B2F B2F B1 B2
0 A + LC2 −(B1 + LD21) 0
C1 + D12F D12F D11 D12
0 −C2 D21 0
(2.39)
En consecuencia, el diseño de un sistema de control se reduce, básicamente, endiseñar una Q que cumpla con ciertas condiciones de performance planteadas.Por ejemplo, el control en H∞, en donde el criterio performance es minimizar lanorma infinito de la transferencia Fl(G, K), podría plantearse seleccionando unQ adecuado, de modo que:
ınfK‖Fl(G, K)‖∞ = ınf
Q‖T11 + T12QT21‖∞ ≤ γ
Parametrización de Youla LPV
Suponga una planta LPV Gol(θ) como la definida en la sección 2.2.3. En conse-cuencia, G22(θ(t)) resulta ser:
G22(θ(t)) ≡
A(θ(t)) B2
C2 0
. (2.40)
Con el fin de extender el concepto de doble factorización coprima para sistemasLPV, se presenta primero una condición suficiente para la existencia de uncontrolador LPV estabilizante.
[ 5 de julio de 2010 at 14:57 ]

2.3 la parametrización de youla 31
Lema 2.29. Un controlador por realimentación de estados observados para un plantaLPV como la de la ecuación 2.40, puede ser formulado como:
˙x = A(θ)x + B2u + L(θ)(C2x− y)
u = F (θ)x (2.41)
en donde F (θ) y L(θ) son funciones matriciales continuas del parámetro θ(t). Llevandoa cabo el cambio de variables, F (θ) = V(θ)P−1
f y L(θ) = P−1l W(θ), si existen dos
matrices Pf y Pl, simétricas y definidas positivas, tal que las siguientes LMIs,
A(θ)Pf + PfAT(θ) + B2V(θ) + VT(θ)BT2 <0 (2.42)
AT(θ)Pl + PlA(θ) +W(θ)C2 + CT2WT(θ) <0
se satisfacen, entonces el lazo cerrado formado por la planta (2.40) y el controlador (2.41)es cuadráticamente estable.
Demostración. Ver Xie y Eisaka [48].
Comentario 2.30. La prueba puede generalizarse a sistemas LPV sin considerar lasuposición 2.13.
Comentario 2.31. Cuando el sistema LPV en cuestión es politópico como el de laecuación (2.16), definido por sus p sistemas vértice, siendo cada uno de estos como el dela ecuación (2.17), es suficiente con verificar un sistema de 2p LMIs que surgen de losmismos. Concretamente, si existen dos matrices Pf y Pl, simétricas y definidas positivas,tal que las siguientes LMIs:
AiPf + Pf ATi + B2Vi + VT
i BT2 <0 (2.43)
ATi Pl + Pl Ai + WiC2 + CT
2 WTi <0 (2.44)
se satisfacen para i = 1, . . . , p, entonces el sistema a lazo cerrado con el controlador LPVpor realimentación de estados estimados es cuadráticamente estable. Siendo Fi = ViP−1
f
y Li = P−1l Wi, F (θ) y L(θ) quedan definidas a través de una combinación convexa de
las matrices vértice Fi y Li de la siguiente manera:
F (θ) =n
∑i=1
αi(t)Fi
L(θ) =n
∑i=1
αi(t)Li
[ 5 de julio de 2010 at 14:57 ]
32 control lpv
−∫
A(θ)
F(θ)
C2B2
yx
yuG22(θ)
L(θ)
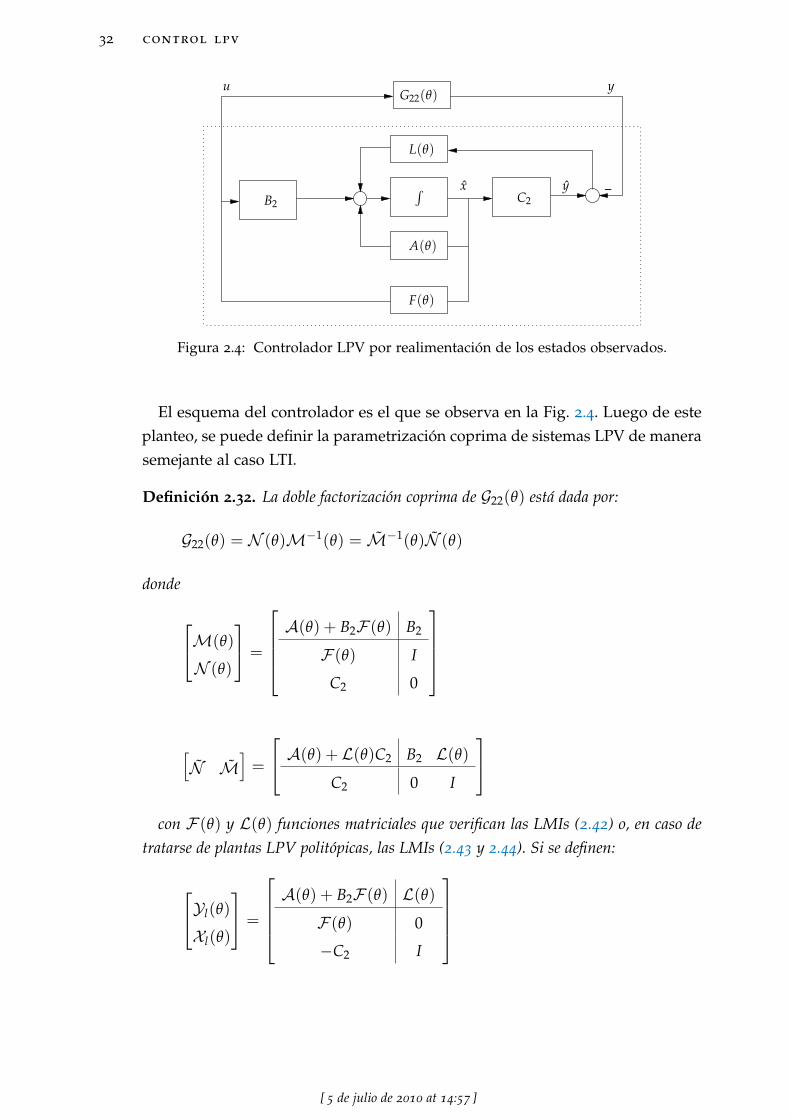
Figura 2.4: Controlador LPV por realimentación de los estados observados.
El esquema del controlador es el que se observa en la Fig. 2.4. Luego de esteplanteo, se puede definir la parametrización coprima de sistemas LPV de manerasemejante al caso LTI.
Definición 2.32. La doble factorización coprima de G22(θ) está dada por:
G22(θ) = N (θ)M−1(θ) = M−1(θ)N (θ)
donde
M(θ)
N (θ)
=
A(θ) + B2F (θ) B2
F (θ) I
C2 0
[N M
]=
A(θ) + L(θ)C2 B2 L(θ)
C2 0 I
con F (θ) y L(θ) funciones matriciales que verifican las LMIs (2.42) o, en caso de
tratarse de plantas LPV politópicas, las LMIs (2.43 y 2.44). Si se definen:
Yl(θ)
Xl(θ)
=
A(θ) + B2F (θ) L(θ)
F (θ) 0
−C2 I
[ 5 de julio de 2010 at 14:57 ]

2.3 la parametrización de youla 33
y u
vh Q(θ)
K(θ)
M(θ)
Figura 2.5: Parametrización de Youla LPV.
[Xr(θ) Yr(θ)
]=
A(θ) + L(θ)C2 −B2 L(θ)
F (θ) I 0
puede demostrarse que es válida la siguiente igualdad: Xr(θ) Yr(θ)
−N (θ) M(θ)
M(θ) −Yl(θ)
N (θ) Xl(θ)
=
I 0
0 I
Familia de Controles Estabilizantes Para Sistemas LPV
A continuación se desarrollan las expresiones de la parametrización de Youlapara sistemas LPV. La estructura del problema se corresponde con la Fig. 2.5.
Teorema 2.33. Suponga nuevamente una planta Gol(θ) como la definida en la sección2.2.3, la cual se interconecta con un controlador como el de la ecuación (2.41). Entoncestodos los controladores estabilizantes pueden ser expresados como Fl(M(θ),Q(θ)), conunaM(θ) y una Q(θ), cuadráticamente estable sobre el rango de variación de θ(t), quecumplan con las siguientes estructuras:
M(θ) =
A(θ) + B2F (θ) + L(θ)C2 −L(θ) B2
F (θ) 0 I
−C2 I 0
(2.45)
Q(θ) =
AQ(θ) BQ(θ)
CQ(θ) DQ(θ)
(2.46)
[ 5 de julio de 2010 at 14:57 ]

34 control lpv
w z
h v
uy
G(θ)
M(θ)
Q(θ)
T(θ)
Figura 2.6: Esquema con el parámetro Q para sistemas LPV.
en donde existe una matriz PQ > 0 tal que:
ATQ(θ)PQ + PQAQ(θ) < 0
Demostración. Ver Xie y Eisaka [48]
Compensadores Q(θ) γ-subóptimos
La Fig. 2.6 muestra el esquema general de la situación, en donde G(θ) es unaplanta LPV como la establecida en la sección 2.2.3, y M(θ) es un compensadorcomo el definido en el lema 2.29. Por lo tanto, el sistema T(θ) = Fl(G(θ), M(θ))
posee la siguiente estructura:
At(θ) =
A(θ) + B2F (θ) B2F (θ)0 A(θ) + L(θ)C2
[Bt1(θ) B12
]=
B1(θ) B2
−B1(θ)−L(θ)D21 0
(2.47)
[ 5 de julio de 2010 at 14:57 ]

2.4 enfoque para la síntesis de controladores lpv switcheados 35
Ct1(θ)
Ct2
=
C1(θ) + D12F (θ) D12F (θ)0 −C2
Dt11(θ) Dt12
Dt21 Dt22
=
D11(θ) D12
D21 0
A partir de estas definiciones, es posible plantear una condición necesaria y
suficiente para la existencia de un compensador γ-subóptimo para la plantageneralizada T(θ).
Teorema 2.34. Considere la planta LPV 2.47. Se definen NR y NS como los espaciosnulos de (BT
t2, DTt12) y (Ct2, Dt21), respectivamente. Entonces, existe un controlador
LPV Q(θ) cuadráticamente estable que garantiza ‖z‖2 ≤ γ ‖w‖2 por sobre todas lastrayectorias del parámetro, si y solo si, existen dos matrices simétricas (R,S) en R2n×2n
que satisfacen un sistema de LMIs equivalente al establecido previamente por 2.12, 2.13y 2.14.
Comentario 2.35. Para sistemas politópicos existen condiciones equivalentes a lasplanteadas en el corolario 2.15.
2.4 enfoque para la síntesis de controladores lpv switcheados
En esta sección se presenta el procedimiento para la síntesis de controladoresLPV switcheados, basado en el enfoque propuesto en Bianchi y Sánchez Peña[6].
La formulación LPV tiene ciertas limitaciones. Por ejemplo, se podría men-cionar que en sistemas con un gran número de parámetros, el problema deoptimización, con los algoritmos LMI típicos, demanda un gran esfuerzo com-putacional (ver Lee [20]). Justamente en [20], se encuentra, probablemente, elprimer acercamiento para reducir dichas limitaciones. Los autores proponendividir el espacio de variación del parámetro en subconjuntos solapados y dis-eñar un controlador LPV para cada uno de ellos. De esta manera, la estrategiaglobal se construye a través de la interpolación de los controladores locales.Sin embargo, en Bianchi y Sánchez Peña [6] se propone una idea distinta. Elprocedimiento allí planteado, inspirado por los trabajos en LTI [7] y [18], estáfundamentado sobre el principio de separación de la parametrización de Youla,dividiendo el diseño del controlador en dos etapas. La primer etapa se enfoca enasegurar la estabilidad global, mientras que la segunda, en lograr la performance
[ 5 de julio de 2010 at 14:57 ]

36 control lpv
deseada en cada subconjunto. Lo atractivo de esta técnica radica en el hecho quecada controlador local, el cual resulta más simple de sintetizar e implementar,puede ser diseñado de manera independiente respecto de los otros subconjuntos.Esta característica permite obtener una mejor performance, sin comprometer laestabilidad global, que está garantizada por condiciones convexas carentes delímites sobre el switcheo entre los controladores.
2.5 sistemas lpv switcheados
De acuerdo a Liberzon y Morse [21], matemáticamente, un sistema switcheadopuede ser descripto por una ecuación diferencial de la forma
x = fσ(x)
donde fθ : θ ∈ P es una familia de funciones suficientemente regulares de Rn aRn que está parametrizada por algún conjunto de índices P , y σ : [0, ∞) → Pes una función del tiempo constante por partes, llamada señal de switching.Particularmente en este proyecto, al igual que en gran parte de la literatura,se considera el caso particular donde todos los subsistemas individuales sonlineales. Bajo esa suposición, se puede establecer que un sistema LPV switcheado,como se mencionó previamente, depende de un parámetro de scheduling θ. Elconjunto P ⊂ Rnθ , donde el parámetro varía, está dividido, por medio de unconjunto de superficies de switcheo Sij, en subconjuntos cerrados {Pi}i∈Zn ,tal que P =
⋃Pi, donde Zn = {1, 2, . . . , n}. Los subconjuntos puede estarsuperpuestos o no, y en ese último caso Sij = Sji. La dinámica del sistema encada subconjunto está dada por
Gcl,i(θ) :
{xcl = Acl,i(θ)xcl + Bcl,i(θ)w,
z = Ccl,i(θ)xcl +Dcl,i(θ)w,∀ θ ∈ Pi (2.48)
donde xcl ∈ Rnx es el estado, w ∈ Rnw es la perturbación y z ∈ Rnz es la señalcontrolada. La evolución del índice i describe una función continua σ(t) quetoma valores en Zn. Esta señal de switcheo indica qué sistema se encuentraactivo Gcl,i(θ), en cualquier tiempo, permitiendo expresar su comportamientodinámico como
Gcl,σ(θ) :
{xcl = Acl,σ(θ)xcl + Bcl,σ(θ)w,
z = Ccl,σ(θ)xcl +Dcl,σ(θ)w,∀ θ ∈ P . (2.49)
[ 5 de julio de 2010 at 14:57 ]

2.6 control lpv switcheado basado en la parametrización de youla 37
La lógica de switcheo determina el cambio del sistema dependiendo del valordel parámetro. Por lo tanto, también establece el conjunto de señales de switcheoy las características de estabilidad de los sistemas switcheados. Bajo señalesarbitrarias de switching, para que el sistema sea exponencialmente estable, serequiere encontrar una función de Lyapunov común Vσ(xcl, θ) = xT
clXcl(θ)xcl talque
Xcl(θ)Acl,i(θ) +ATcl,i(θ)Xcl(θ) + Xcl(θ) < 0, ∀ θ ∈ Pi, ∀ i ∈ Zn (2.50)
donde Xcl(θ) = dXcl(θ)/dt y νl ≤ θl ≤ νl para l = 1, 2, . . . , nθ. Esta condiciónfuerte puede ser relajada, limitando el conjunto de señales de switcheo conlógicas particulares, como histéresis o tiempo promedio de dwell [23]. Con unconjunto más reducido de señales de switching, es posible emplear múltiplesfunciones de Lyapunov, sin embargo dichas funciones no son completamenteindependiente una de las otras, dado que deben también verificar condicionesadicionales en las superficies de switching, con el fin de garantizar estabilidadglobal [23, 24].
2.6 control lpv switcheado basado en la parametrización de youla
2.6.1 Planteo del problema
Dado un sistema LPV a lazo abierto como el de la definición 2.7 y que verifique lasuposición 2.8. Se asume que las matrices del sistema son funciones continuas yacotadas de un parámetro θ medible en tiempo real, que toma valores de un con-junto compacto P ⊂ Rnθ sin límites impuestos sobre su velocidad de variación.Además, como es usual, se asume que los pares (A(θ),B2(θ)) y (A(θ), C2(θ))
son cuadráticamente estabilizables y detectables, respectivamente (Wu et al. [47])y se considera que el conjunto de variación del parámetro P está dividido en unconjunto finito de subconjuntos {Pi}i∈Zn con P =
⋃Pi. El objetivo es formularuna metodología para diseñar una familia de n controladores LPV
Ki(θ) :
{xK = AK,i(θ)xK + BK,i(θ)y,
u = CK,i(θ)xK +DK,i(θ)y,i ∈ Zn (2.51)
con xK ∈ Rnk . Cada controlador debe cumplir las especificaciones de perfor-mance en el correspondiente subconjunto Pi, mientras que la estabilidad estágarantizada durante el switcheo del controlador. El sistema resultante a lazocerrado es equivalente al sistema LPV definido en (2.49).
[ 5 de julio de 2010 at 14:57 ]

38 control lpv
2.6.2 Diseño de un controlador LPV switcheado
Con el fin de resolver el problema anterior, se utilizan las ideas de la parametrizaciónde Youla, que fueron comentadas en la sección 2.3. El esquema de control sepuede expresar a través de unaM(θ) como la de la ecuación 2.45 y
Qσ(θ) :
{xQ = AQ,σ(θ)xQ + BQ,σ(θ)h,
v = CQ,σ(θ)xQ +DQ,σ(θ)h(2.52)
Se puede percibir que este esquema difiere del planteado en la sección 2.3,dado que Qσ(θ) es cualquier sistema LPV switcheado estable. De acuerdo a laspropiedades similares, que esta estructura de control, presenta respecto de otrasparametrizaciones de Youla, la estabilidad de
J (θ) = Fl (G(θ),M(θ))
no se ve afectada con la inclusión de cualquier sistema LPV switcheado estableQσ(θ). Esta propiedad, eje central de la técnica que se plantea, permite descom-poner el diseño del controlador en dos pasos. El primero consiste en encontrarun pre-compensadorM(θ) que garantice la estabilidad en el rango de operacióncompleto de P y el segundo en diseñar los parámetros Qi(θ) para obtener laperformance deseada en cada subconjunto. Es importante destacar que en esteesquema de control, solamente Qσ(θ) es un sistema LPV switcheado. A fin deformalizar las ideas previas es necesario probar la estabilidad exponencial delsistema switcheado a lazo cerrado
Gcl,σ(θ) = Fl (J (θ),Qσ(θ))
Esto se puede probar siguiendo los pasos establecidos en 2.3, considerando queahora Qσ(θ) es un sistema LPV switcheado, con lo cual
XQAQ,i(θ) +AQ,i(θ)TXQ < 0, (2.53)
para todo θ ∈ Pi e i ∈ Zn. A través del Lemma A.2 de [6], se puede probar quesiempre es posible encontrar una transformación de estados Ti tal que el sistemaLPV switcheado asociado a
Qi(θ) :
{xQ = TiAQ,i(θ)T−1
i xQ + TiBQ,i(θ)h,
v = CQ,i(θ)T−1i xQ +DQ,i(θ)h,
(2.54)
[ 5 de julio de 2010 at 14:57 ]

2.6 control lpv switcheado basado en la parametrización de youla 39
sea exponencialmente estable. Por lo tanto, cada Qi(θ) puede ser diseñadoindependientemente de los otros, por lo que la performance en cada Pi no esafectada por los Qi(θ) correspondientes al resto de los subconjuntos. El diseñode cada Qi(θ) puede realizarse mediante cualquier procedimiento de síntesisLPV a la planta
J (θ) :
xJ = AJ(θ)xJ + BJ1(θ)w + BJ2(θ)v,
z = CJ1(θ)xJ +DJ11(θ)w +DJ12(θ)v,
h = CJ2(θ)xJ +DJ21(θ)w,
(2.55)
donde los valores de θ se restringen al subconjunto Pi durante el diseño de Qi(θ)
y xTJ = [xT xT
M]. De esta manera, el parámetro de Youla Qi(θ) se computa comoun controlador LPV estándar válido en el subconjunto Pi, por lo que puede,por ejemplo, aplicarse el método de síntesis propuesto en 2.3 n veces, dado queexisten n subconjuntos Pi, pero sin la necesidad de resolverlos simultáneamente.Una vez que los parámetros de Youla se computan, solo resta encontrar lastransformaciones de estado Ti para modificar las realizaciones con el fin degarantizar la estabilidad exponencial de Qσ(θ) y Gcl,σ(θ). Estas transformacionesal no depender del parámetro θ no afectan las características de estabilidady performance logradas durante el cálculo de las Qσ(θ)’s. Para resumir, elprocedimiento de síntesis se reduce a los siguientes dos pasos:
• Se construye un precompensador,M(θ), que estabilice cuadráticamente elsistema LPV en todo el rango de operación Pc, basado en la realimentaciónde los estados observados (ver 2.3).
• Se busca una Qi(θ) cuadráticamente estable para cada subconjunto Pi
tal que se cumpla la performance especificada. Cada Qi(θ) puede serdiseñado aplicando cualquier procedimiento de síntesis LPV estándar a laplanta J (θ) para todo θ ∈ Pi. Finalmente, se computa la transformaciónde estados Ti de acuerdo al lema A.2 en [6].
[ 5 de julio de 2010 at 14:57 ]

40 control lpv
Con los parámetros Qi(θ) obtenidos previamente, las matrices del sistema delos controladores (2.51) están dadas por
AK,i(θ) =
A(θ) + B2(θ)F (θ) + L(θ)C2(θ)−B2(θ)DQ,i(θ)C2(θ) B2(θ)CQ,i(θ)T−1
i
TiBQ,i(θ)C2(θ) TiAQ,i(θ)T−1i
,
BK,i(θ) =
B2(θ)DQ,i(θ)−Li(θ)
TiBQ,i(θ)
,
CK,i(θ) =[Fi(θ)−DQ,i(θ)C2(θ) CQ,i(θ)T−1
i
],
DK,i(θ) = DQ,i(θ),
con θ ∈ Pi, i ∈ Zn. Estos controladores pueden ser switcheados arbitrariamentesin afectar la estabilidad de Gcl,σ(θ).
Es importante destacar que la elección de una matriz de Lyapunov Xcl, nolimita la existencia de unM(θ) estabilizante dado que el sistema por hipótesises cuadráticamente estabilizable y detectable. Por otro lado, la performance locallograda en cada subconjunto Pi no se ve afectada por la elección de una F (θ)y una L(θ) particulares, dado que K(θ) = Fl (M(θ),Q(θ)) describe todos loscontroladores cuadráticamente estabilizantes.
2.6.3 Ventajas y desventajas del procedimiento
Las principales ventajas de este procedimiento de síntesis son:
• La descomposición del diseño en dos etapas con el fin de reducir la solucióna un par de condiciones de optimización convexas. Esto, a su vez, permite:
• Obtener un conjunto de procedimientos de síntesis, que pueden serresueltos con las herramientas disponibles, a través de separar elproblema de estabilidad del de performance.
• Reducir el número de variables y condiciones en cada problema deoptimización, lo que permite su aplicación a plantas LPV con unmayor número de parámetros.
• No fuerza el uso de funciones de Lyapunov dependientes del parámetroen cada subconjunto, debido que al ser Qi(θ) cuadráticamente estable, laparametrización, Ki(θ) = Fl (M(θ),Qi(θ)), describe únicamente aquelloscontroladores que estabilizan cuadráticamente la planta G(θ) para todo
[ 5 de julio de 2010 at 14:57 ]

2.6 control lpv switcheado basado en la parametrización de youla 41
θ ∈ Pi. Por lo tanto, está garantizada la existencia de una matriz deLyapunov constante luego de sintetizar cada Qi(θ). Esto representa unsimplificación substancial en el cómputo online de la señal de control conrespecto a las versiones dependientes del parámetro.
Como desventaja fundamental de este procedimiento, se puede mencionar queel número de estados del controlador resultante puede ser grande en plantasde órdenes elevados. Si se emplean algoritmos de síntesis LPV estándares paradiseñar las Qi(θ)’s, el orden final que se alcanza es de 4ns. Sin embargo, esteorden puede reducirse si la planta LPV incluye estados no controlables o noobservables.
[ 5 de julio de 2010 at 14:57 ]
[ 5 de julio de 2010 at 14:57 ]

3S U S P E N S I Ó N M A G N É T I C A C O N T R O L A D A P O RC O N M U TA C I Ó N L P V
3.1 motivación
En este capítulo, se presenta la resolución del sistema de control para un sistemade suspensión magnética activa MBC500, con turbina. El MBC500 es un productodiseñado y producido para fines académicos y científicos por la firma MagneticMoments, una división de LaunchPoint Technologies, LLC (ver Paden et al.[30] para una descripción detallada del MBC500 y también la página web dela compañía http://www.launchpnt.com). La opción “Turbo 500” que vieneincluida con el sistema en cuestión, permite imprimir una rotación de velocidadcontrolada al eje suspendido.
El problema de control bajo estudio, trata de la estabilización del rotor delMBC500. Sin importar que tan bien balanceado esté el rotor, siempre quedauna excentricidad residual en el mismo. Esto implica que el eje de inercia noestá perfectamente alineado con el eje geométrico del rotor por lo cual aparecenfuerzas de desbalanceo dinámico. Como consecuencia, el control de la vibracióndebida al desbalanceo figura entre los objetivos más importantes del problema,suponiendo conseguida la estabilización.
En la práctica, el desbalanceo se modela como fuerzas “externas” que rep-resentan a la excentricidad, mientras se considera al rotor como un cuerporígido perfecto. Estas fuerzas pseudo–externas, son, como funciones del tiempo,sinusoidales de frecuencia desconocida pero medible, siendo esta la velocidad degiro del rotor. La fase y magnitud de estas senoides es incierta, aunque acotada.
El interés en el uso de sistemas rotativos con suspensión magnética activa,viene dado por aplicaciones en las cuales se pretende alcanzar velocidades derotación altas, de manera controlada. Un compendio de aplicaciones industrialesde sistemas de suspensión magnética activa, puede verse a partir del artículode Knospe y Collins [19] y en todos los artículos del volumen 4, número 5, delIEEE Transactions on Control Systems Technology, del año 1996.
La resolución del problema de control que se presenta en este capítulo, repre-senta una continuación del trabajo que fue reportado sucesivamente en Ghersinet al. [14, 15] y Ghersin [13]. Dicha investigación, que se recopila en Ghersin
43
[ 5 de julio de 2010 at 14:57 ]
44 suspensión magnética controlada por conmutación lpv
[13], consta de tres etapas. Lo presentado en este informe, constituye la cuartageneración de diseños LPV para el MBC500.
El trabajo recopilado en Ghersin [13], fue originalmente motivado por Mat-sumura et al. [26]. En dicho artículo, se utiliza una técnica de loop–shaping H∞
para el control de la suspensión magnética del rotor de un motor. Este diseñodesprecia a priori la dinámica de rotación y desbalanceo dinámico para conseguirla estabilización. A través de un filtro eliminabanda de frecuencia variable, quese sintoniza con la frecuencia dada por la velocidad de giro del rotor, se lograuna buena eliminación del desbalanceo dinámico en la práctica, conectando elfiltro con el controlador estabilizante en forma lineal fraccionaria. Este enfoquevía gain scheduling clásico, fue ensayado en la práctica. No obstante, el marcoteórico no ofrece garantías de estabilidad, y los límites a la tasa de cambio de lavelocidad de rotación se establecen en forma práctica, por medio de simulacióny ensayos experimentales.
Los controles cuyo diseño se recopila en Ghersin [13], ponen en prácticadiseños LPV de los cuales vale la pena destacar dos. En Ghersin et al. [15], sepone en práctica un diseño LPV con ubicación de polos (Ghersin y Sánchez Peña[16]). El aspecto positivo más saliente del diseño, es el buen desempeño quemuestra el controlador LPV. Como complicación en la aplicación del método, secita lo restringido del rango de variación del parámetro LPV (4000 a 5000 rpm).
El segundo diseño a comentar, es el más logrado de los publicados en Ghersin[13]. El mismo, hace uso de la técnica de Wu y Dong [46], poniendo en prácticauna estrategia de switching ad–hoc, conmutando entre dos controles diseñadosrespectivamente para los rangos de 3000 a 4100 rpm, y 3900 a 5000 rpm. Laestrategia de conmutación usada, al igual que en el presente trabajo, es lade conmutación con histéresis. Este diseño, prueba en la práctica y mediantesimulaciones, la viabilidad de la estrategia de conmutación, no obstante lo cualno se brindan garantías desde la teoría, para la estabilidad del sistema conconmutación.
Los lineamientos generales para la resolución del problema, se mantienen,inclusive en este trabajo, de acuerdo al planteo hecho en Ghersin et al. [15].Es decir, el modelado e identificación originalmente hechos, se mantienen sincambios. También es el mismo, el tratamiento de los modos flexibles, comoincerteza dinámica global al estilo del Control Robusto H∞.
En este trabajo, se ha hecho hincapié en el empleo de la técnica de switchingde Bianchi y Sánchez Peña [6]. La motivación original para el empleo de estatécnica, viene dada por las dificultades previas, respecto del acotado rango de
[ 5 de julio de 2010 at 14:57 ]

3.1 motivación 45
variación del parámetro. Al mismo tiempo, se investigó sobre los problemasnuméricos con la formulación del problema LPV.
El planteo original de Ghersin et al. [14, 15] y Ghersin [13], lleva a cabo eldiseño de los controles para dos grados de libertad (DOF), i.e., la dinámicahorizontal del rotor. La razon prácticaoriginal para hacer el control en 2 DOFes la que siguiente. El efecto giroscópico, que hace a la dinámica del rotorcomo cuerpo rígido ideal, describe el acoplamiento entre los estados verticales yhorizontales del rotor. Mientras dicho efecto depende de la velocidad angulardel rotor en forma lineal, la magnitud de la fuerza excéntrica, depende de lavelocidad angular en forma cuadrática, lo cual hace que desde el punto devista práctico, el acoplamiento horizontal–vertical sea despreciable frente aldesbalanceo dinámico.
Las razones que se agregan en esta instancia para mantener la resolución delproblema restringida a 2 DOF son las que siguen:
1. A pesar de contar para la implementación digital de los controladores, conuna computadora equipada con un procesador Intel Pentium E 2140 de dosnucleos, operando con un reloj de 1,6 GHz, los preliminares del presentetrabajo de investigación, mostraron la inposibilidad de implementar uncontrolador para los cuatro grados de libertad del sistema. Visto que eldinámica rígida del sistema de 4 DOF tiene 16 estados, y considerandoque la planta aumentada lleva este número a 40 estados, la capacidad decómputo de la PC limita la resolución de los 2 DOF. La técnica de Bianchi ySánchez Peña [6], hace crecer el número de estados en al menos 16 estadosmás, lo cual hizo prever al comenzar la parte experimental del trabajo, queno se podrían llegar a ensayar controles para 4 DOF.
2. El grado de mejoramiento obtenido en el diseño LPV de 2 DOF es alenta-doramente significativo como para sacar conclusiones relevantes sobre losmétodos LPV Switcheados y su implementación práctica, que es el objetivofundamental de este trabajo más allá del problema de control de AMB’s.
Sobre el último punto, y adelantando parte de las conclusiones, se pone enevidencia que a pesar de las bondades del método LPV Switcheado, uno de losaspectos que ha permitido mejorar más notablemente el desempeño del controlimplementado así como el rango práctico para el cual se diseña (100 a 6000 rpm
con Switching), viene favorecido por un replanteo de los pesos con los cualesse especifica la planta aumentada para la síntesis de los controladores LPV.Reiterando lo dicho, en este trabajo se mejoran aspectos numéricos del diseñoque permiten obtener resultados notablemente mejores que en Ghersin [13].
[ 5 de julio de 2010 at 14:57 ]

46 suspensión magnética controlada por conmutación lpv
Figura 3.1: El MBC500
Este capítulo está organizado de la siguiente manera. En la próxima secciónse presenta el modelo utilizado para diseño y simulaciones. En la sección 3.3, sepresentan los resultados de la síntesis del controlador llevada a cabo, junto conlas simulaciones y resultados experimentales.
3.2 identificación del mbc500
Está sección, esencialmente tomada de Sánchez Peña et al. [39], Cap. 10, presentaun modelo para la dinámica del rotor de un MBC500.
El rotor, eje horizontal que se observa en la Fig. 3.1, es de acero inoxidable ypuede levitar usando ocho electroimanes tipo herradura, cuatro en cada unode sus extremos. A su vez, próximos a los electroimanes, pero más cercanos alos extremos del rotor, se encuentran sensores de efecto Hall, a fin de medir eldesplazamiento de dichos extremos respecto del equilibrio. Esto se representa enel diagrama de la Fig. 3.2, donde el desplazamiento del equilibrio medido por lossensores está dado por x1 (y1) y x2 (y2), y el desplazamiento del rotor con respectoa los electroimanes, por X1 (Y1) y X2 (Y2) para la dinámica horizontal (vertical).Los valores de los parámetros del eje de acuerdo a [25, 30] se reproducen en latabla 3.1.
[ 5 de julio de 2010 at 14:57 ]

3.2 identificación del mbc500 47
Cuadro 3.1: Parámetros del MBC500
Símbolos Descripción ValorL Longitud total del rotor 0,269 ml Distancia desde cada electroimán 0,024 m
hasta el extremo del rotorl2 Distancia desde cada sensor de efecto Hall 0,0028 m
hasta el extremo del rotorI Momento de inercia del rotor con respecto 1,5884× 10−3 kg m2
a la rotación en torno de los ejes x e ym Masa del rotor 0,2629 kg
z
x
Electroimanes
Sensores de Efecto Hall
Ll2
l
X1 x1 x2 X2
Figura 3.2: Vista superior del MBC500
[ 5 de julio de 2010 at 14:57 ]

48 suspensión magnética controlada por conmutación lpv
3.2.1 Modelo rígido de 4 DOF
Dados los siguientes sistemas de referencia:
• I fijo al cuerpo del MBC500, con el eje z del sistema alineado con eleje longitudinal del rotor, el eje x completando la definición del planohorizontal y el eje y apuntando hacia arriba.
• B fijo al cuerpo del rotor.
• B también fijo al cuerpo del rotor, pero sin seguir su movimiento derotación en torno del eje longitudinal z, originando que en equilibrio B eI coincidan, aún con el rotor girando en torno de ese eje.
A través de estos sistemas de referencia que permiten describir completamenteel estado del rotor, junto con la aplicación de leyes físicas, como la segundaley de Newton, hipótesis, como la existencia de pequeños ángulos, y tomandoen cuenta que el movimiento en la dirección horizontal del eje se encuentralimitado por la propia estructura, es posible obtener la siguiente representacióndel sistema en variables de estado:
x0 = vx (3.1)
θ = q
vx =1m
Fx
q =1I
My − rIz
Ip
y0 = vy (3.2)
φ = p
vy =1m
Fy − g
p =1I
Mx + rIz
Iq
Las cuatro primeras líneas, comenzando desde la ecuación (3.1), describen ladinámica horizontal, mientras que las últimas cuatro, comenzando desde laecuación (3.2), describen la vertical, teniendo en cuenta que:
• x0 e y0 son las coordenadas x e y del centro de masa en I .
• θ y φ son las posiciones angulares de los ejes x e y de B respecto de los deI expresadas en B.
• vx y vy son las componentes x e y de la velocidad del centro de masa en I .
[ 5 de julio de 2010 at 14:57 ]

3.2 identificación del mbc500 49
• p y q son las componentes x e y de la velocidad angular de B respecto deI y r es la correspondiente componente z de la velocidad angular de Brespecto de B. Todas las componentes (p, q y r) se expresan en B.
• m es la masa del rotor.
• Fx y Fy son las fuerzas horizontales y verticales sobre el eje.
• Mx y My son los momentos resultantes de las fuerzas Fx y Fy aplicadassobre el rotor expresadas en B.
• I e Iz son los momentos de inercia del rotor con respecto a sus ejes x e y ya su eje z respectivamente.
Se puede apreciar, mediante las ecuaciones anteriores, que cuando el rotorno está girando (r = 0) las dinámicas horizontal y vertical se encuentran de-sacopladas.
3.2.2 Fuerzas, Momentos y Tensiones de Entrada/Salida
Las ecuaciones respecto de las tensiones, fuerzas y momentos son similares alas que se encuentran en Morse et al. [27], salvo unas pocas modificaciones encuanto a signos que representan las discrepancias entre el modelo citado en lareferencia y las mediciones tomadas del MBC500 utilizado aquí.
Como se mencionó previamente, las variables x1, x2, y1 e y2 representan eldesplazamiento del rotor respecto del equilibrio en los extremos del eje dondelas fuerzan magnéticas son aplicadas, mientras que las variables X1, X2, Y1
e Y2 hacen referencia al desplazamiento del rotor con respecto al equilibriodonde se ubican los sensores de efecto Hall (ver Fig. 3.2). Estas variables estánrelacionadas con las variables cinemáticas a través de las ecuaciones presentadasa continuación:
x1 = x0 + (L2− l) sin (θ) (3.3)
x2 = −x0 + (L2− l) sin (θ)
X1 = x0 + (L2− l2) sin (θ)
X2 = −x0 + (L2− l2) sin (θ)
[ 5 de julio de 2010 at 14:57 ]

50 suspensión magnética controlada por conmutación lpv
y1 = y0 − (L2− l) sin (φ) (3.4)
y2 = y0 + (L2− l) sin (φ)
Y1 = y0 − (L2− l2) sin (φ)
Y2 = y0 + (L2− l2) sin (φ)
De acuerdo a [30, 27, 25], las fuerzas ejercidas por los electroimanes están dadaspor las siguientes expresiones:
Fx1 = +k
[(ix1 + 0,5
x1 − 4× 10−4
)2
−(
ix1 − 0,5x1 + 4× 10−4
)2]
(3.5)
Fx2 = −k
[(ix2 + 0,5
x2 − 4× 10−4
)2
−(
ix2 − 0,5x2 + 4× 10−4
)2]
Fy1 = +k
[(iy1 + 0,5
y1 − 4× 10−4
)2
−(
iy1 − 0,5y1 + 4× 10−4
)2]
Fy2 = +k
[(iy2 + 0,5
y2 − 4× 10−4
)2
−(
iy2 − 0,5y2 + 4× 10−4
)2]
donde ix1 , ix2 , iy1 e iy2 son las corrientes de los electroimanes que ejercen lasfuerzas magnéticas sobre el rotor y k = 2,8× 10−7 Nm2
A2 . Como resultado de laúltima expresión, las fuerzas y los momentos ejercidos sobre el eje son:
Fx = Fx1 + Fx2 (3.6)
Fy = Fy1 + Fy2
My = (L2− l)Fx1 − (
L2− l)Fx2
Mx = −(L2− l)Fy1 + (
L2− l)Fy2
De acuerdo nuevamente con [30, 27, 25], las tensiones de salida de los sensoresde efecto Hall están relacionadas con las variables de desplazamiento Xi e Yi
(i = 1, 2) por las siguientes ecuaciones:
Voxi= 5× 103Xi + 25× 109X3
i i = 1, 2 (3.7)
Voyi= 5× 103Yi + 25× 109Y3
i
[ 5 de julio de 2010 at 14:57 ]
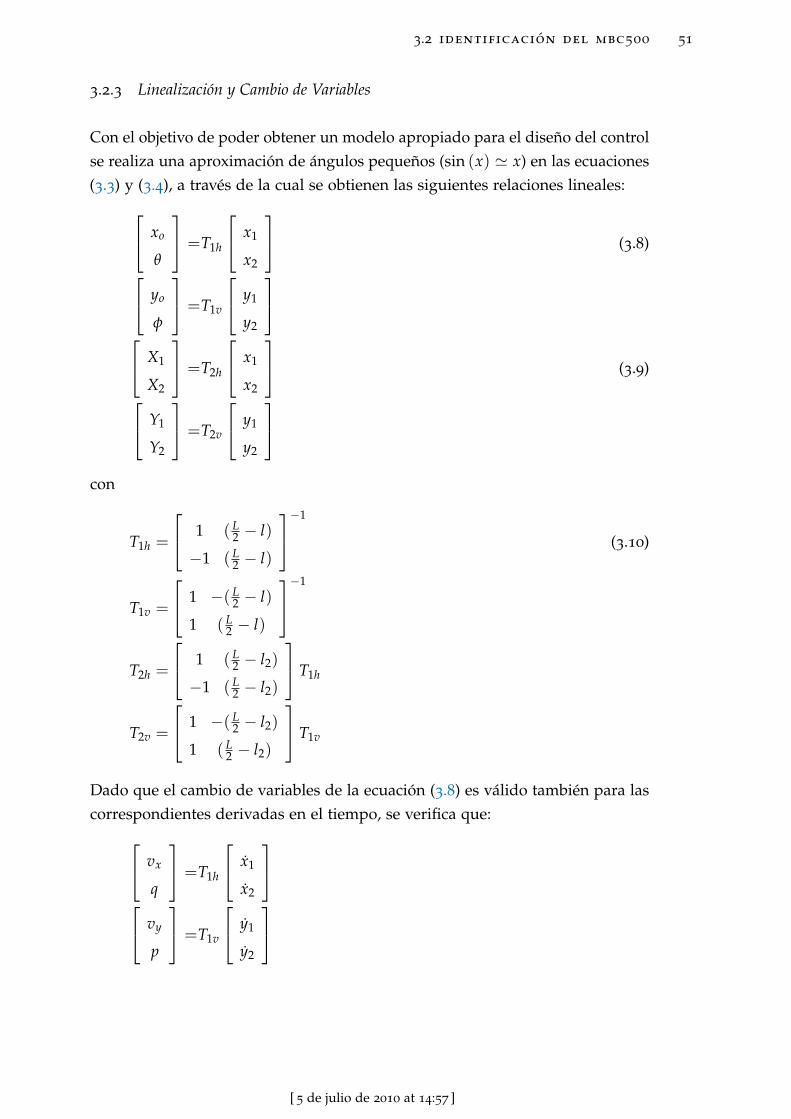
3.2 identificación del mbc500 51
3.2.3 Linealización y Cambio de Variables
Con el objetivo de poder obtener un modelo apropiado para el diseño del controlse realiza una aproximación de ángulos pequeños (sin (x) ' x) en las ecuaciones(3.3) y (3.4), a través de la cual se obtienen las siguientes relaciones lineales: xo
θ
=T1h
x1
x2
(3.8)
yo
φ
=T1v
y1
y2
X1
X2
=T2h
x1
x2
(3.9)
Y1
Y2
=T2v
y1
y2
con
T1h =
1 ( L2 − l)
−1 ( L2 − l)
−1
(3.10)
T1v =
1 −( L2 − l)
1 ( L2 − l)
−1
T2h =
1 ( L2 − l2)
−1 ( L2 − l2)
T1h
T2v =
1 −( L2 − l2)
1 ( L2 − l2)
T1v
Dado que el cambio de variables de la ecuación (3.8) es válido también para lascorrespondientes derivadas en el tiempo, se verifica que: vx
q
=T1h
x1
x2
vy
p
=T1v
y1
y2
[ 5 de julio de 2010 at 14:57 ]

52 suspensión magnética controlada por conmutación lpv
Para continuar el proceso, se toman derivadas parciales en la ecuación (3.5) conrespecto a las corrientes ix1 , ix2 , iy1 e iy2 y los desplazamientos x1, x2, y1 e y2,a fin de lograr una aproximación de primer orden de las fuerzas respecto delorigen. Esto permite, que al reemplazar esa expresión en las ecuaciones listadaspor (3.1) y (3.2), con el posterior cambio de variables a través las matrices decambio de base T1h y T1v, se pueda obtener un modelo en espacio de estadosdel sistema. La salida de este modelo se puede establecer al tomar derivadasparciales en la ecuación (3.7) con respecto a X1, X2, Y1 e Y2 y luego aplicar elcambio de variables (3.9) para obtener una aproximación lineal de la ecuación(3.7) en términos de x1, x2, y1 e y2. Finalmente, sea x la variable de estados quereúne los estados horizontales y verticales:
x =
xh
xv
xh =
x1
x2
x1
x2
xv =
y1
y2
y1
y2
Sean i e y las variables de entrada y salida respectivamente, ambas tambiéndivididas como en el caso anterior,
i =
ih
iv
ih =
ix1
ix2
iv =
iy1
iy2
y =
yh
yv
yh =
Vox1
Vox2
yv =
Voy1
Voy2
,
el modelo lineal es: xh
xv
=
Ah rAhv
rAvh Av
xh
xv
+
Bh 0
0 Bv
ih
iv
(3.11)
yh
yv
=
Ch 0
0 Cv
xh
xv
[ 5 de julio de 2010 at 14:57 ]

3.2 identificación del mbc500 53
donde
Ah =
02 I2
Ahh 02
Bh =
02
Bhh
Ch =[
Chh 02
]
Av =
02 I2
Avv 02
Bv =
02
Bvv
Cv =[
Cvv 02
]
Las matrices Ahh, Avv, Bhh, Bvv, Chh y Cvv se determinan a través de las derivadasparciales de las ecuaciones (3.5) y (3.7) con respecto a xh, xv, uh y uv. Las matricesAhv y Avh son:
Ahv =
02 02
02 T1z
Avh =
02 02
02 T2z
donde
T1z = T−11h
0 0
0 − IzI
T1v
T2z = T−11v
0 0
0 − IzI
T1h
A fin de regular la corriente en los electroimanes, existe un amplificador decorriente cuya dinámica está dada por:
dixi
dt=
12,2× 10−4
(−ixi +
14
Vixi
)i = 1, 2 (3.12)
diyi
dt=
12,2× 10−4
(−iyi +
14
Viyi
),
[ 5 de julio de 2010 at 14:57 ]

54 suspensión magnética controlada por conmutación lpv
Con esta notación,
u =
uh
uv
uh = Vh =
Vix1
Vix2
uv = Vv =
Viy1
Viy2
,
la dinámica lineal de la red LR, se puede expresar en términos de las siguientesfunciones de transferencia:
ixi(s) =ka
1 + s2π fc
Vixi(s) fc = 723,43 Hz ka = 0,25 (3.13)
iyi(s) =ka
1 + s2π fc
Viyi(s) i = 1, 2
3.2.4 Datos Experimentales y Ajuste de los Parámetros
En orden de obtener un modelo lineal que sea adecuado para el diseño delcontrolador, se debe recordar que el rotor está expuesto a perturbaciones queson despreciadas al modelarlo como un cuerpo rígido. Dichas perturbaciones,como fue mencionado en la introducción de este capítulo, son las fuerzas dedesbalanceo y la existencia de modos flexibles. Sin embargo, el desbalanceoes una "perturbación"mucho peor para la dinámica no rotacional del modeloque la presencia de los modos flexibles, dado que la dependencia de la fuerzade desbalanceo con la velocidad de rotación del eje es cuadrática, mientrasque la del efecto giroscópico es lineal. Como consecuencia, en el proceso deidentificación se omite el acoplamiento existente entre las dinámicas horizontaly vertical, i.e. se asume que Ahv = 0 y Avh = 0. A su vez, dados los objetivos deeste proyecto, se considera suficiente lograr identificar y controlar el subsistemahorizontal. Con estas consideraciones, la ecuación (3.11) resulta ser:
xr =
02 I2
Ar 02
xr +
02
Br
u (3.14)
yr =[
Cr 02
]xr
con Br = Brka y donde
Ar = Ahh Br = Bhh Cr = Chh (3.15)
xr = xh yr = yh u = uh
[ 5 de julio de 2010 at 14:57 ]

3.2 identificación del mbc500 55
c(s)
P(s)
c(s)c(s)c(s)
−−−−
vy2
vx2 vy1
Voy2
Vox2
Vox1
Voy1
Vix1
Vix2
Viy1
Viy2
vx1
Figura 3.3: MBC500 con el compensador
Por último, antes de comenzar con la descripción del proceso de identifi-cación, es necesario remarcar que el sistema es inestable a lazo abierto, lo queimposibilita obtener respuestas sin que esté conectado a un compensador quelo estabilice. El MBC500 posee un compensador interno, que le permite al ejelevitar, diseñado con técnicas clásicas despreciando todo acoplamiento presenteentre las dinámicas del rotor. La función de transferencia de este compensador,dada por el mapeo entre las tensiones de salida y las de control, de acuerdo con[30, 27], es:
c(s) = kc
sωz
+ 1
( sωp
+ 1)( sωh f
+ 1)∼= kc
sωz
+ 1s
ωp+ 1
con
fz = 178,63 Hz ωz = 2π fz (3.16)
fp = 482,29 Hz ωp = 2π fp
fh f = 21,9 KHz ωh f = 2π fh f
kc = 1,41.
En la Fig. 3.3 se puede observar que el magnetic bearing tiene cuatro entradasy ocho salidas. A su vez, posee 4 switches en el panel frontal que permitenoperar con el compensador interno conectado (lazo cerrado) o desconectado(lazo abierto). Una vez señaladas las observaciones anteriores, se procede aresumir el proceso de identificación. Dicho proceso consiste, con el compensadorinterno conectado, en inyectar señales sinusoidales a la entrada de la planta y,asumiendo linealidad e invariancia en el tiempo (r = 0), obtener muestras en
[ 5 de julio de 2010 at 14:57 ]

56 suspensión magnética controlada por conmutación lpv
frecuencia de la función de transferencia de la entrada a la señal de control u(Sensibilidad de Entrada), denotada como Sr(s), y de la entrada a la salida de laplanta y, denotada como GSr(s), donde
Sr(s) = [I + C(s)Gr(s)]−1 C(s) =
c(s) 0
0 c(s)
GSr(s) = Gr(s)Sr(s).
Las muestras en frecuencia de las matrices de transferencia Sr(s) y GSr(s)se toman para n frecuencias diferentes de 10 a 90 Hz con n = 81. Para eserango, se puede ver a través de la ecuación (3.13), que la relación entre latensión y la corriente puede simplificarse a ih = kauh e iv = kauv. El proceso deadquisición de las muestras en frecuencia se lleva a cabo en una forma SISO.Esto significa, que para cada par entrada-salida de las matrices de transferenciade dos entradas-dos salidas, y para cada uno de los puntos de frecuencia, seinyecta una señal sinusoidal capturando una respuesta temporal. Luego, seaplica una descomposición espectral sobre la señal adquirida, conservandocomo resultado la componente correspondiente a la frecuencia de entrada. Alrepetir este proceso para todos los pares entrada-salida, de ambas matricesde transferencia, se obtiene la información necesaria para calcular "muestras"de la respuesta frecuencial de la dinámica rígida a lazo abierto Gr(s). Esteprocedimiento de adquisición de "muestras", basado en el trabajo de Smith [38],consiste en calcular Gr(ωl), para cada una de los n puntos de frecuencia wl conl = 1, ..., n, de la siguiente manera:
Gr(ωl) = GSr(ωl)Sr(ωl)−1 =
Gr11(ωl) Gr12(ωl)
Gr21(ωl) Gr22(ωl)
(3.17)
Para cada frecuencia, la muestra obtenida consiste en cuatro valores complejos,uno por cada entrada de la matriz de transferencia de dos entradas-dos salidas,como se ve en la ecuación (3.17). Estos cuatro valores se apilan para formar elvector ϑj en C4 y a su vez, todos estos vectores resultantes, también se apilan
[ 5 de julio de 2010 at 14:57 ]
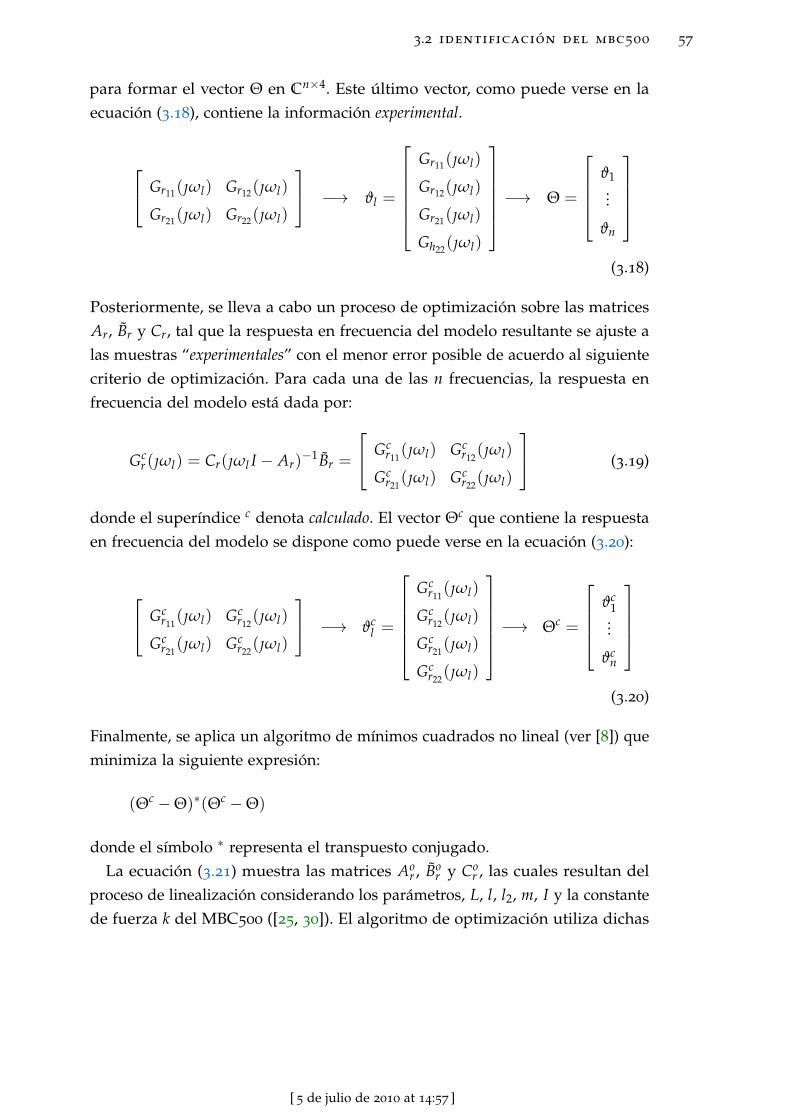
3.2 identificación del mbc500 57
para formar el vector Θ en Cn×4. Este último vector, como puede verse en laecuación (3.18), contiene la información experimental.
Gr11(ωl) Gr12(ωl)
Gr21(ωl) Gr22(ωl)
−→ ϑl =
Gr11(ωl)
Gr12(ωl)
Gr21(ωl)
Gh22(ωl)
−→ Θ =
ϑ1...
ϑn
(3.18)
Posteriormente, se lleva a cabo un proceso de optimización sobre las matricesAr, Br y Cr, tal que la respuesta en frecuencia del modelo resultante se ajuste alas muestras “experimentales” con el menor error posible de acuerdo al siguientecriterio de optimización. Para cada una de las n frecuencias, la respuesta enfrecuencia del modelo está dada por:
Gcr(ωl) = Cr(ωl I − Ar)
−1Br =
Gcr11(ωl) Gc
r12(ωl)
Gcr21(ωl) Gc
r22(ωl)
(3.19)
donde el superíndice c denota calculado. El vector Θc que contiene la respuestaen frecuencia del modelo se dispone como puede verse en la ecuación (3.20):
Gcr11(ωl) Gc
r12(ωl)
Gcr21(ωl) Gc
r22(ωl)
−→ ϑcl =
Gc
r11(ωl)
Gcr12(ωl)
Gcr21(ωl)
Gcr22(ωl)
−→ Θc =
ϑc
1...
ϑcn
(3.20)
Finalmente, se aplica un algoritmo de mínimos cuadrados no lineal (ver [8]) queminimiza la siguiente expresión:
(Θc −Θ)∗(Θc −Θ)
donde el símbolo ∗ representa el transpuesto conjugado.La ecuación (3.21) muestra las matrices Ao
r , Bor y Co
r , las cuales resultan delproceso de linealización considerando los parámetros, L, l, l2, m, I y la constantede fuerza k del MBC500 ([25, 30]). El algoritmo de optimización utiliza dichas
[ 5 de julio de 2010 at 14:57 ]

58 suspensión magnética controlada por conmutación lpv
matrices como condiciones iniciales del proceso de optimización y retorna comoresultado las matrices Ar, Br y Cr que pueden observarse también en (3.21).
Aor = 104
5,0273 1,6990
1,6990 5,0273
Ar = 105
0,9460 0,6307
0,0118 1,1214
(3.21)
Bor = 100
40,2180 13,5919
13,5919 40,2180
Br = 100
20,0832 8,8209
1,7109 30,2025
Co
r = 103
5,4796 0,4796
0,4796 5,4796
Cr = 104
1,1115 0,3419
0,1667 1,0206
3.2.5 Identificación del Compensador
Un análisis de la documentación de Magnetic Bearing System ([25]), muestraque los valores de las ganancias kc en las funciones de transferencia de loscompensadores (ver ecuación (3.16)) es probable que sean inexactos. Una miradasobre los esquemáticos de los circuitos analógicos que representan a los compen-sadores indica que las frecuencias fz, fp y fh f son determinadas por valores deresistores y capacitores que al ser fijos, se los puede considerar confiables. Porotro lado, existe también un resistor variable a la entrada del compensador paraajustar su ganancia. En consecuencia, se puede aplicar un proceso de ajuste sobrelas ganancias del compensador, similar al descripto en la sección anterior. Elcriterio de optimización es exactamente el mismo, con la salvedad que la funciónde transferencia del modelo Gr, identificada previamente, se considera ahoracomo la verdadera función de transferencia y la optimización se lleva a cabo sobrelas dos ganancias (una por compensador) para ajustar las muestras en frecuenciacon el compensador identificado. Los valores resultantes son kc1 = 0,6647 parael compensador izquierdo y kc2 = 0,6395 para el derecho.
3.2.6 Modos flexibles
Es importante incluir la dinámica de los dos primeros modos flexibles, por elhecho que pueden ser excitados dada la implementación digital de los contro-ladores diseñados. La razón de no incluir ningún otro modo de orden superiores que debido al ancho de banda de los amplificadores de corriente, es práctica-mente imposible que esos modos sean excitados. En [27] se presenta un modelo
[ 5 de julio de 2010 at 14:57 ]

3.2 identificación del mbc500 59
Gr
G f1
G f2
u
y f1
y f2
yr y
G
Figura 3.4: Superposición de las dinámicas rígida y flexible
con cuatro estados para los dos primeros modos flexibles y se señala la similitudexistente con un sistema masa-resorte.
La dinámica rígida aparece en una banda de frecuencias que abarca desdeDC hasta alrededor de 100 Hz, mientras que el primer modo flexible apareceen 777 Hz y el segundo en 2065 Hz. Una aproximación práctica al modelo final,que considera la dinámica rígida y flexible, consiste en la superposición de tresbloques lineales como se muestra en la Fig. 3.4.
Sea x fi =
x1fi
x2fi
el estado de los bloques flexibles G fi , con i = 1, 2, las
ecuaciones en variables de estado de cada uno de ellos resultan ser:
x fi = A fi x fi + B fi u
y fi = C fi x fi
con
A fi =
0 ω fi
ω fi 0
B fi =
bi1 bi
2
0 0
C fi =
0 ci1
0 ci2
.
Las muestras en frecuencia de la matriz de transferencia se obtienen de manerasimilar a la descripta en la sección 3.2.4, utilizando en este caso la informacióndel compensador identificado. Por último, se realiza un ajuste de parámetrossobre las matrices A fi , B fi y C fi con i = 1, 2 buscando que las respuestas enfrecuencia calculadas y experimentales se ajusten de una manera adecuada.
[ 5 de julio de 2010 at 14:57 ]

60 suspensión magnética controlada por conmutación lpv
Los valores finales de los parámetros del modelo para modos flexibles son lossiguientes:
ω f1 = 2π 777rad
sb1
1 = 5,5 b12 = −8 c1
1 = 7 c12 = 7
ω f2 = 2π 2065rad
sb2
1 = 3 b22 = 3 c2
1 = −3 c22 = −5
3.2.7 Excentricidad del rotor
Como se mencionó previamente, la excentricidad se considera como una fuerzaexterna que actúa sobre el rotor. En lugar de hacer una identificación fina de lamagnitud y dirección de la fuente del desbalanceo, se busca una mera estimaciónde esta fuerza. Otra simplificación que se lleva a cabo respecto a la excentricidad,es el hecho que se desprecian las variaciones en la velocidad de rotación deleje, por lo que la fuerza excéntrica del modelo sólo depende del cuadrado de lavelocidad de rotación. En virtud de esto, se realiza un cálculo muy simple parael caso estático, a fin de tomar en cuenta el desbalanceo en la dinámica rígida,que modifica ligeramente la ecuación (3.14) de la siguiente manera.
xr =
02 I2
Ar 02
xr +
02
Br
u + r2
02
kim I2
wim (3.22)
yr =[
Cr 02
]xr
con
kim =12
1100
ro ro =12
do do = 12× 10−3m
donde do es el diámetro del eje. El factor 1100 surge de considerar que la distancia
respecto del centro de masa verdadero al eje geométrico del rotor, es del ordendel uno por ciento en relación al radio del eje (una suposición algo pesimista -ver Fig. 3.5) y el factor 1
2 , del hecho de considerar que son dos los cojinetes que seenfrentan a la excentricidad. Para dar un ejemplo que refleje la solvencia de estaaproximación, si la velocidad de rotación es de 10000 rpm (rmax = 2π 10000/60rad
s ), la magnitud de la perturbación sobre las aceleraciones xi (i = 1, 2) seríade ror2
max = 43,86 ms2 . De acuerdo con la matriz Br, esta perturbación está en el
orden de magnitud que los electroimanes pueden manejar con una entrada deun par de voltios.
[ 5 de julio de 2010 at 14:57 ]
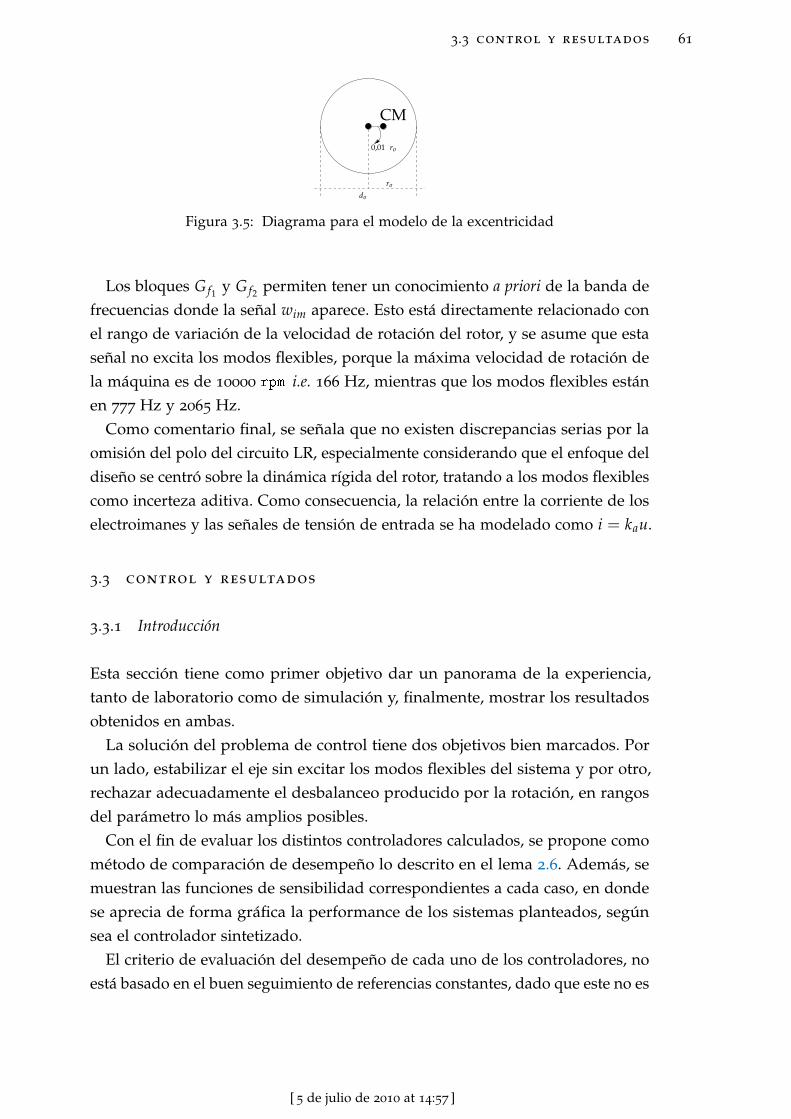
3.3 control y resultados 61
do
ro
CM
0,01 ro
Figura 3.5: Diagrama para el modelo de la excentricidad
Los bloques G f1 y G f2 permiten tener un conocimiento a priori de la banda defrecuencias donde la señal wim aparece. Esto está directamente relacionado conel rango de variación de la velocidad de rotación del rotor, y se asume que estaseñal no excita los modos flexibles, porque la máxima velocidad de rotación dela máquina es de 10000 rpm i.e. 166 Hz, mientras que los modos flexibles estánen 777 Hz y 2065 Hz.
Como comentario final, se señala que no existen discrepancias serias por laomisión del polo del circuito LR, especialmente considerando que el enfoque deldiseño se centró sobre la dinámica rígida del rotor, tratando a los modos flexiblescomo incerteza aditiva. Como consecuencia, la relación entre la corriente de loselectroimanes y las señales de tensión de entrada se ha modelado como i = kau.
3.3 control y resultados
3.3.1 Introducción
Esta sección tiene como primer objetivo dar un panorama de la experiencia,tanto de laboratorio como de simulación y, finalmente, mostrar los resultadosobtenidos en ambas.
La solución del problema de control tiene dos objetivos bien marcados. Porun lado, estabilizar el eje sin excitar los modos flexibles del sistema y por otro,rechazar adecuadamente el desbalanceo producido por la rotación, en rangosdel parámetro lo más amplios posibles.
Con el fin de evaluar los distintos controladores calculados, se propone comométodo de comparación de desempeño lo descrito en el lema 2.6. Además, semuestran las funciones de sensibilidad correspondientes a cada caso, en dondese aprecia de forma gráfica la performance de los sistemas planteados, segúnsea el controlador sintetizado.
El criterio de evaluación del desempeño de cada uno de los controladores, noestá basado en el buen seguimiento de referencias constantes, dado que este no es
[ 5 de julio de 2010 at 14:57 ]

62 suspensión magnética controlada por conmutación lpv
el objetivo principal. Por el contrario, los diseños obtenidos mediante las técnicasLPV propuestas intentan minimizar el índice de performance γ, el cual tieneuna directa vinculación con el rango de excursión del parámetro. Por lo tanto, secalifica la respuesta de cada uno de los controladores de esta manera. Mas aún,pedir buen seguimiento demandaría una elevada ganancia en baja frecuencia,lo cual se traduce en un pico en la función de sensibilidad entre la frecuenciade corte y la frecuencia de cruce. Esto fenómeno se produce de acuerdo conlas limitaciones propias de los sistemas, establecidas por el denominado efectocama de agua en plantas con polos inestables (ver [28, 35]). Otro camino paraevaluar la performance, es a través de las respuestas temporales para cada unode los diseños realizados. Esta perspectiva permite analizar excitación de losmodos flexibles y el comportamiento transitorio. Así, estos resultados puedencompararse con las respuestas obtenidas mediante el uso de los compensadoresinternos análogicos con los cuales viene equipado el MBC500.
3.3.2 Diseño del Sistema LPV
De acuerdo con la estrategia de control elegida, es preciso plantear el marconecesario para el diseño del compensador, que garantizará la optimización de laperformance en ganancia L2, para que el planteo del problema LPV pueda serenunciado.
De esta forma, el primer análisis pertinente implica la adecuada elección delas transferencias utilizadas como pesos de las señales a optimizar. Se puedenmencionar cuatro transferencias a diseñar: la primera de ellas, es aquella quepondera la señal de ruido generada por la fuerza excéntrica W1(θ, s), la segunda,es la que modela los modos flexibles, generalmente mencionada en la bibliografíacomo W∆(s), debido a su relación con la incerteza del sistema ∆(s). En tercerlugar, la señal de control será pesada por el filtro Wu(s) y, finalmente, la señal desalida z1, por la transferencia W2(s). La Fig. 3.6 muestra el esquema general delsistema planta-pesos, es decir, la planta aumentada. Por último, cabe mencionarque el único elemento del sistema aumentado que depende del parámetro esW1(θ, s), convirtiéndolo de esta forma en quién le da el carácter de LPV alsistema.
El trabajo de Ghersin et al. [15], propone un peso W1 equivalente al modelode un filtro de notch1 de frecuencia variable y amplitud dependiente de r2, queda cuenta de que la señal wim es sinusoidal de frecuencia r. De esta forma, semodela la fuerza excéntrica como una señal sinusoidal actuando sobre el eje,
1 Eliminabanda.
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 63
W2(s)
u
y
y
y∆
z1
W1(r, r2, s)wim
Gr(s)
d1
d2
Wu(s)
W∆(s)
Figura 3.6: Planta Aumentada.
cuya frecuencia depende de la velocidad de rotación de este. Así, el diseñopropuesto por Ghersin [13], considerando una velocidad de rotación r fija, es elsiguiente:
W1(s) =
w1(s) 0
0 w1(s)
(3.23)
w1(s) = r2 rss2 + 2ξrs + r2 ≡
−2ξr −r2 r2
1 0 0
r 0 0
(3.24)
Este diseño aproxima al modelo de una señal sinusoidal en el dominio deLaplace, a medida que ξ → 0 (en la práctica se tomó un ξ = 0,2). De esta forma,es que se propone asemejar la fuerza excéntrica necesaria, para dar cuenta alalgoritmo de síntesis en H∞ de los factores externos que afectan al lazo.
Es en esta instancia, donde este trabajo muestra la primer mejora al realizadopor Ghersin [13], al proponer reformular la estructura de W1(s), transformandoy reescribiendo esta transferencia en su forma de Jordan. Esta idea permitirá, enetapas posteriores, obtener un mejor desempeño en los algoritmos numéricos decómputo en la síntesis de controladores LPV.
[ 5 de julio de 2010 at 14:57 ]

64 suspensión magnética controlada por conmutación lpv
Si se realiza la transformación adecuada se tiene que:
w1(s) ≡
−rξ r
√1− ξ2 r
−r√
1− ξ2 −rξ −rξ√1−ξ2
r2 0 0
(3.25)
De esta forma, ya es posible adelantar una de las conclusiones más importantesdel trabajo. Se observa al momento de cálculo, que el rango de factibilidad de lasLMI’s intervinientes es notoriamente más amplio, al confrontar los resultadosobtenidos con los resultados anteriores (Ghersin et al. [15]). Esto último puedeatribuirse al hecho de que, cuando se analiza la estabilidad cuadrática de ambosmodelos, se verifica que el que se encuentra en la forma de Jordan resultacuadráticamente estable para todo el conjunto de variación del parámetro. Estono ocurre con el modelo propuesto por Ghersin [13], en donde la realización envariables de estado elegida para el peso, presenta problemas al momento en quese evalúa su estabilidad cuadrática.
La representación de estado en la forma de Jordan del modelo de w1(s), puedeser reescrita en forma afín con la dependencia del filtro en r y r2, tal que:
w1(s) ≡
0 0 0
0 0 0
0 0 0
+ r
−ξ
√1− ξ2 1√
1− ξ2 −ξ −rξ√1−ξ2
0 0 0
+ r2
0 0 0
0 0 0
1 0 0
(3.26)
Es oportuno mencionar que la elección del vector de parámetros como[r , r2] es
consecuencia de la necesidad de plantear al sistema en su forma afín. Sin em-bargo, esto determina un diseño más conservador al obviar la relación existenteentre ambas magnitudes.
Por otro lado, el filtro W∆(s) se modela, como se mencionó previamente, conel fin de dar al algoritmo de control cierto conocimiento acerca de los modosflexibles. La función de transferencia de esta función de peso es:
W∆ =
w∆(s) 0
0 w∆(s)
(3.27)
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 65
ωbi(s) =s2 + ωbi s + ω2
bi
s2 + ωbi ξs + ω2bi
(3.28)
con i = 1, 2 y
ωb1 = 2π 777rad
sξb1 = 0,02
ωb2 = 2π 2065rad
sξb2 = 0,02
Puede interpretarse W∆(s) como una combinación de funciones de peso parauna familia de plantas con incerteza aditiva. Esta última se toma en cuenta conel fin de minimizar la norma de la transferencia que mapea desde la señal d2
a la señal y∆, mediante el empleo de sensibilidades mixtas en el algoritmo dediseño.
Para la acción de control el fin buscado es limitar el ancho de banda. Por estemotivo, se propone un modelo de polo simple con un cero en el origen:
Wu(s) =
wu(s) 0
0 wu(s)
(3.29)
wu(s) = kus
s + ωu(3.30)
con
ωu = 2π 400rad
sku = 0,6
Finalmente, la elección del último de los pesos W2, se realiza de la siguienteforma:
W2(s) =
w2(s) 0
0 w2(s)
(3.31)
w2(s) = kl1
sωl
+ 1(3.32)
[ 5 de julio de 2010 at 14:57 ]
66 suspensión magnética controlada por conmutación lpv
con
ωl = 2π 100rad
skl = 2
El criterio de diseño utilizado para ω2 y ωl se basa en establecer los anchosde banda para el lazo cerrado y el de control, respectivamente. Luego, y ahorareferenciando todos los pesos enunciados en el problema de diseño, se realizóun ajuste fino de cada una de las constates enunciadas mediante un procesoiterativo, acercándolas a sus valores de mejor desempeño.
3.3.3 Diseño del Controlador Central: M(s)
El diseño de esta transferencia se lleva a cabo para todo el rango de variacióndel parámetro, omitiendo cada uno de sus subconjuntos. De esta manera, lo quese busca es estabilizar el sistema LPV general y no delinear su desempeño operformance, debido a que esto último se lleva a cabo posteriormente medianteel diseño del parámetro de Youla.
Como el modelo de la planta G(s) no posee dependencia con el parámetro,como ya se mencionó, todo el carácter LPV del sistema recae sobre W1(r, r2, s).Este filtro LPV, al igual que los otros pesos LTI, es cuadráticamente estable, dadoque es el requerimiento establecido por las técnicas de diseño de la teoría deControl Óptimo en H∞ al encontrarse fuera del lazo. Por este motivo, es posibleomitir los pesos en la etapa de diseño del controlador central M(s). Esto significaque la síntesis de M(s) puede hacerse considerando únicamente el modelo LTI,a fin de estabilizar el sistema Fl (G(s), M(s)), con la consiguiente disminucióndel orden del controlador y mayor exactitud de cómputo.
Como se menciona en la sección 2.6.2 del Cap. 2, M(s) puede diseñarse comouna realimentación de estados observados, asignando polos al subsistema a lazocerrado. La decisión tomada sobre la ubicación de los mismos, es llevada a cabode acuerdo con métodos clásicos de optimización de respuestas temporales. Poreste motivo, es que se fuerza que la parte real de dichos polos sea mayor, enmagnitud, a la de los polos inestables de la planta a lazo abierto. De esta forma,se minimizan los picos en las respuestas transitorias, pero sin obviar que estodemanda cierta exigencia sobre la señal de control.
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 67
3.3.4 Parametrización Completa del Controlador: Qσ(θ, s)
Según fue descrito en la sección 2.6.2 del Cap. 2, para completar la síntesis delcontrolador, es necesario definir, finalmente, el filtro LPV Qi(θ, s), en cada unade las regiones de conmutación. Se define como objetivo de control minimizarla energía entre la señal de ruido excéntrico y su efecto en la salida, añadiendola condición de límite de ancho de banda para la transferencia que vincula wcon z de la Fig. 2.2. Con respecto a este requisito de diseño, se establece, segúnensayos empíricos, que la región LMI (ver definición 2.16) que mejor se adaptaal problema es aquella en la cual, los polos a lazo cerrado poseen su partereal mayor a −425Hz. De esta manera, cuando se anexa el requisito lógico deestabilidad a lazo cerrado, se tiene que los polos se ubican finalmente entre−425Hz y 0Hz. Bajo estas condiciones, la región LMI resulta ser:
D = {z ∈ C : <(z) > −2π 425} . (3.33)
Con este diseño se limita el ancho de banda en la salida, logrando así acotar enella los efectos de señales con frecuencia superior a los 425Hz. Es importanteaclarar que la determinación de este valor se lleva a cabo también en funciónde la factibilidad de los sistemas de LMI’s, dado que estableciendo regionesinferiores a los 400Hz no se obtenían resultados factibles.
Otro factor a determinar en esta etapa, es la elección de cada una de lasregiones, lo cual no es un detalle menor. La división de la región donde varíael parámetro provee una flexibilidad adicional en el diseño del controlador.Una adecuada división puede derivar en controladores que permitan obteneruna mejor performance e incluso, puede ser decisiva a la hora de definir lafactibilidad del problema (Bianchi y Sánchez Peña [6]). Nuevamente, de maneraempírica/recursiva, se determina que los mejores resultados, definiendo comocriterio de evaluación el rango de operabilidad y los efectos transitorios de laconmutación, se obtienen definiendo dos regiones de operación que van desdelos 100Hz hasta los 3500Hz y desde los 3000Hz hasta los 6500Hz. Se puedeapreciar, que ambas regiones comparten una subregión o región de histéresis de500Hz.
Finalmente, con el fin de garantizar la estabilidad exponencial de Qσ(θ) y deGcl,σ(θ), deben definirse las transformaciones de estado adecuadas (ver 2.54). Poreste motivo, de acuerdo al lema A.2 de Bianchi y Sánchez Peña [6], se propone
[ 5 de julio de 2010 at 14:57 ]

68 suspensión magnética controlada por conmutación lpv
como función de Lyapunov común a ambas regiones, a la de la primer región,es decir:
X = X1 (3.34)
con lo cual, dado que X = STS y que X1 = ST1 S1, S resulta ser igual a S1 y por
ende T1 = I. Luego, al determinar la función de Lyapunov de la segunda región(X2 = ST
2 S2), es posible obtener T2, quien es igual a S−11 S2. Debido a que este
procedimiento, fue propuesto de manera ad hoc, se tuvo luego que corroborar,que con esas transformaciones de estado se cumpliera que ambas Qi(θ), coni = 1, 2, verificaran su estabilidad cuadrática exponencial con la misma funciónde Lyapunov X.
3.3.5 Conjunto de Variación del Parámetro
El conjunto de variación del parámetro puede expresarse como:
P = {(θ1, θ2) ∈ [rmin, rmax]× [r2min, r2
max]}
Según se mencionó antes, en términos de Ghersin [13], la reformulación delpeso W1(r, r2, s), y así del sistema LPV general, permitió extender los rangosde factibilidad de las LMI’s de síntesis. Puede indicarse que, si antes se habíallegado a garantizar la factibilidad de las LMI’s en rangos solamente del 20 %del valor de rmax, con rmax ≤ 10000 rpm , ahora el rango de factibilidad se hapodido extender, al menos, a la totalidad de los límites de control, i.e. desde100 rpm a 10000 rpm .
A este último resultado, puede agregarse que los niveles de performancealcanzados son superiores en al menos unas diez veces a los que se obtuvieronen Ghersin [13]. Por lo tanto, se ha mejorado el diseño no sólo en rango, sinotambién en performance alcanzada. En el cuadro 3.2 se muestran algunosresultados obtenidos comparando performance, técnicas de diseño y rangos.
Los resultados obtenidos en Ghersin [13] son los que se muestran en el cuadro3.3
Como cierre de esta sección, puede remarcarse la brecha que existe entre losresultados obtenidos en este trabajo y los existentes en trabajos previos. Por unlado, se logró expandir el rango de factibilidad del proceso de síntesis (antesno pudo superarse un rango del 20 % de rmax, mientras que ahora no se haencontrado límite de factibilidad) en un orden del 500 % y por otro lado, desde
[ 5 de julio de 2010 at 14:57 ]
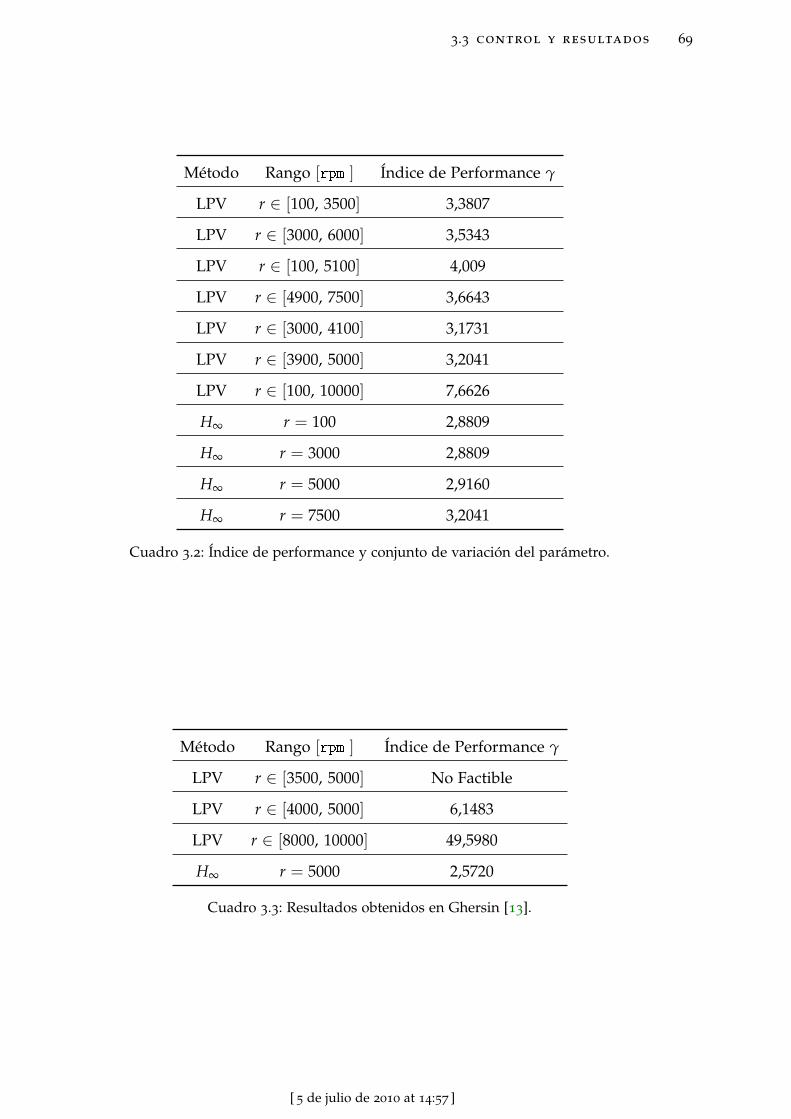
3.3 control y resultados 69
Método Rango [rpm ] Índice de Performance γ
LPV r ∈ [100, 3500] 3,3807
LPV r ∈ [3000, 6000] 3,5343
LPV r ∈ [100, 5100] 4,009
LPV r ∈ [4900, 7500] 3,6643
LPV r ∈ [3000, 4100] 3,1731
LPV r ∈ [3900, 5000] 3,2041
LPV r ∈ [100, 10000] 7,6626
H∞ r = 100 2,8809
H∞ r = 3000 2,8809
H∞ r = 5000 2,9160
H∞ r = 7500 3,2041
Cuadro 3.2: Índice de performance y conjunto de variación del parámetro.
Método Rango [rpm ] Índice de Performance γ
LPV r ∈ [3500, 5000] No Factible
LPV r ∈ [4000, 5000] 6,1483
LPV r ∈ [8000, 10000] 49,5980
H∞ r = 5000 2,5720
Cuadro 3.3: Resultados obtenidos en Ghersin [13].
[ 5 de julio de 2010 at 14:57 ]
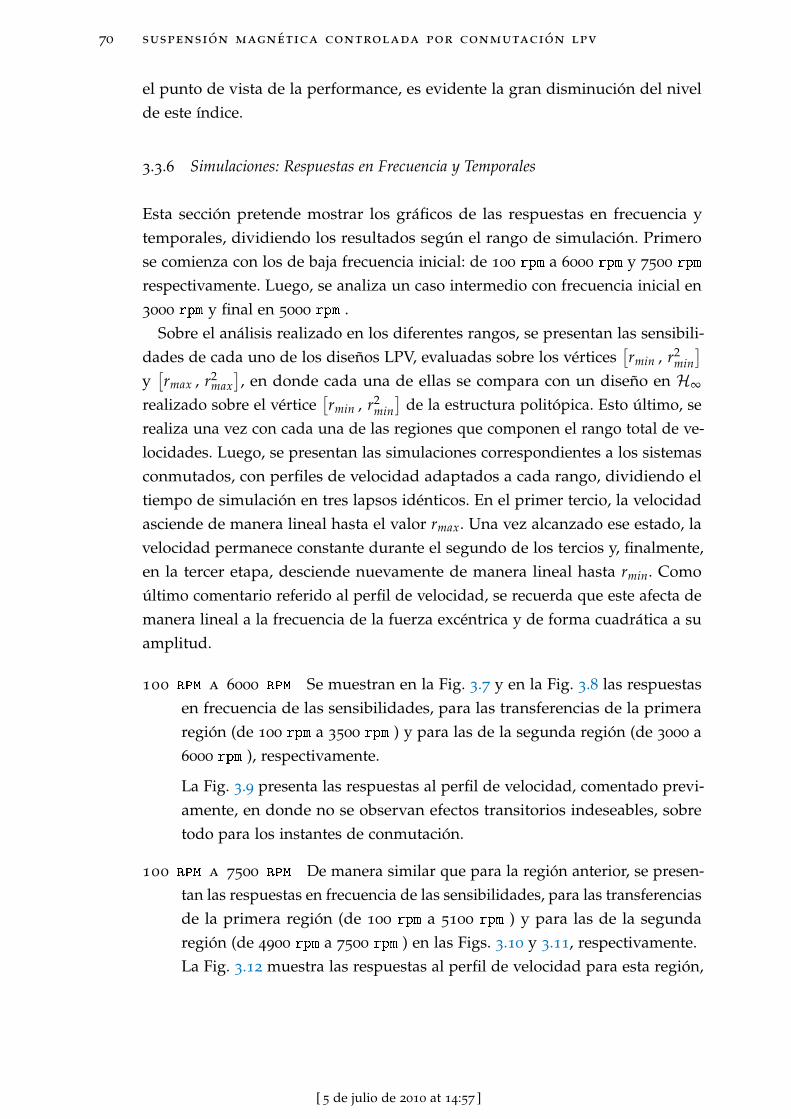
70 suspensión magnética controlada por conmutación lpv
el punto de vista de la performance, es evidente la gran disminución del nivelde este índice.
3.3.6 Simulaciones: Respuestas en Frecuencia y Temporales
Esta sección pretende mostrar los gráficos de las respuestas en frecuencia ytemporales, dividiendo los resultados según el rango de simulación. Primerose comienza con los de baja frecuencia inicial: de 100 rpm a 6000 rpm y 7500 rpm
respectivamente. Luego, se analiza un caso intermedio con frecuencia inicial en3000 rpm y final en 5000 rpm .
Sobre el análisis realizado en los diferentes rangos, se presentan las sensibili-dades de cada uno de los diseños LPV, evaluadas sobre los vértices
[rmin , r2
min]
y[rmax , r2
max], en donde cada una de ellas se compara con un diseño en H∞
realizado sobre el vértice[rmin , r2
min]
de la estructura politópica. Esto último, serealiza una vez con cada una de las regiones que componen el rango total de ve-locidades. Luego, se presentan las simulaciones correspondientes a los sistemasconmutados, con perfiles de velocidad adaptados a cada rango, dividiendo eltiempo de simulación en tres lapsos idénticos. En el primer tercio, la velocidadasciende de manera lineal hasta el valor rmax. Una vez alcanzado ese estado, lavelocidad permanece constante durante el segundo de los tercios y, finalmente,en la tercer etapa, desciende nuevamente de manera lineal hasta rmin. Comoúltimo comentario referido al perfil de velocidad, se recuerda que este afecta demanera lineal a la frecuencia de la fuerza excéntrica y de forma cuadrática a suamplitud.
100 rpm a 6000 rpm Se muestran en la Fig. 3.7 y en la Fig. 3.8 las respuestasen frecuencia de las sensibilidades, para las transferencias de la primeraregión (de 100 rpm a 3500 rpm ) y para las de la segunda región (de 3000 a6000 rpm ), respectivamente.
La Fig. 3.9 presenta las respuestas al perfil de velocidad, comentado previ-amente, en donde no se observan efectos transitorios indeseables, sobretodo para los instantes de conmutación.
100 rpm a 7500 rpm De manera similar que para la región anterior, se presen-tan las respuestas en frecuencia de las sensibilidades, para las transferenciasde la primera región (de 100 rpm a 5100 rpm ) y para las de la segundaregión (de 4900 rpm a 7500 rpm ) en las Figs. 3.10 y 3.11, respectivamente.La Fig. 3.12 muestra las respuestas al perfil de velocidad para esta región,
[ 5 de julio de 2010 at 14:57 ]
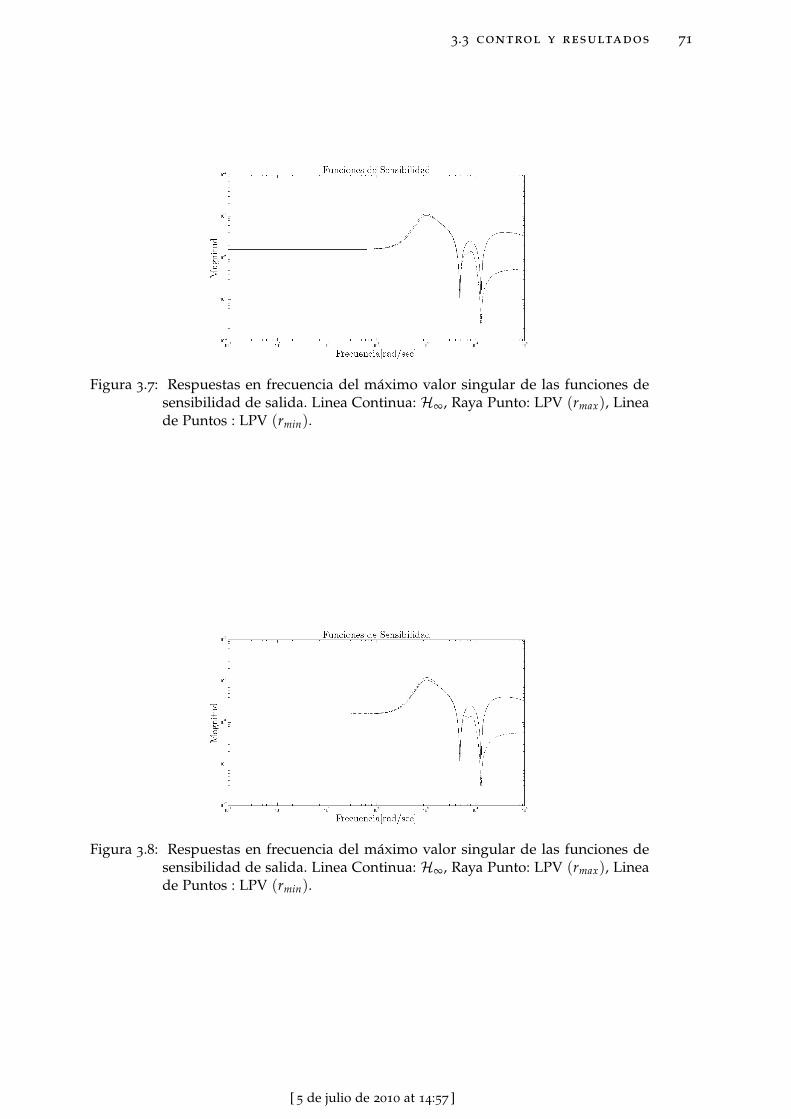
3.3 control y resultados 71
Figura 3.7: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
Figura 3.8: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
[ 5 de julio de 2010 at 14:57 ]

72 suspensión magnética controlada por conmutación lpv
Figura 3.9: Respuestas temporales de acuerdo a un perfil de velocidad determinado. (a)Posiciones de cada uno de los extremos, (b) señal de actuación para cadauno de los extremos, (c) perfil de velocidad. En negro x2 y en gris x1
Figura 3.10: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 73
Figura 3.11: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
en donde, nuevamente, no se observan efectos transitorios indeseables,sobre todo para los instantes de conmutación.
3000 rpm a 5000 rpm Se propone esta región de análisis, con el fin de com-parar las respuestas en frecuencia y temporales, con el trabajo de Ghersin[13]. El esquema es el mismo que se siguió para las otras dos regiones:primero se muestran las respuestas en frecuencia de las sensibilidades (Figs.3.13 y 3.14) para cada una de las subregiones y, finalmente, las respuestastemporales (Fig. 3.15).
Como mención general de aspectos repetidos en cada uno de los tres conjuntosde simulaciones, se puede decir que en todos los casos, los sistemas a lazocerrado presentan un buen rechazo en las frecuencias de los modos flexibles, i.e.en las cercanas a 777 Hz y a 2065 Hz, de acuerdo a como se ve en las gráficas delas sensibilidades. En segundo lugar, ahora haciendo referencia a las respuestastemporales, es notable la atenuación que recibe la fuerza excéntrica, que si bienno es cancelada en su totalidad, su efecto en la salida no tiene relevancia. Porúltimo, y como era de esperarse, se observa una leve diferencia en las respuestasde cada uno de los extremos, dado que uno de ellos posee la turbina que dacapacidad de rotación al sistema.
3.3.7 Resultados Experimentales
Esta sección presenta las gráficas capturadas, producto de la medición de am-bos sentidos, vertical y horizontal, en simultáneo, i.e. las figuras de Lissajousgeneradas por la trayectoria de cada uno de los extremos del eje.
[ 5 de julio de 2010 at 14:57 ]

74 suspensión magnética controlada por conmutación lpv
Figura 3.12: Respuestas temporales de acuerdo a un perfil de velocidad determinado.(a) Posiciones de cada uno de los extremos, (b) señal de actuación para cadauno de los extremos, (c) perfil de velocidad. En negro x2 y en gris x1
Figura 3.13: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 75
Figura 3.14: Respuestas en frecuencia del máximo valor singular de las funciones desensibilidad de salida. Linea Continua: H∞, Raya Punto: LPV (rmax), Lineade Puntos : LPV (rmin).
Figura 3.15: Respuestas temporales de acuerdo a un perfil de velocidad determinado.(a) Posiciones de cada uno de los extremos, (b) señal de actuación para cadauno de los extremos, (c) perfil de velocidad. En negro x2 y en gris x1
[ 5 de julio de 2010 at 14:57 ]
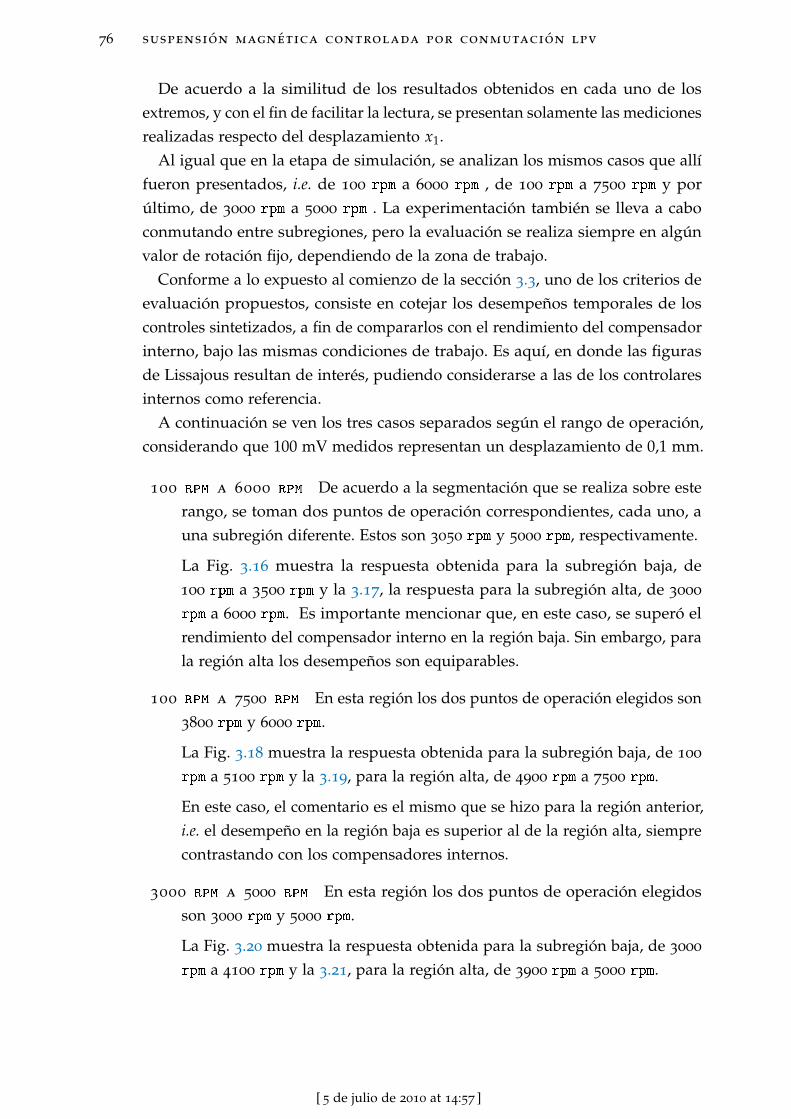
76 suspensión magnética controlada por conmutación lpv
De acuerdo a la similitud de los resultados obtenidos en cada uno de losextremos, y con el fin de facilitar la lectura, se presentan solamente las medicionesrealizadas respecto del desplazamiento x1.
Al igual que en la etapa de simulación, se analizan los mismos casos que allífueron presentados, i.e. de 100 rpm a 6000 rpm , de 100 rpm a 7500 rpm y porúltimo, de 3000 rpm a 5000 rpm . La experimentación también se lleva a caboconmutando entre subregiones, pero la evaluación se realiza siempre en algúnvalor de rotación fijo, dependiendo de la zona de trabajo.
Conforme a lo expuesto al comienzo de la sección 3.3, uno de los criterios deevaluación propuestos, consiste en cotejar los desempeños temporales de loscontroles sintetizados, a fin de compararlos con el rendimiento del compensadorinterno, bajo las mismas condiciones de trabajo. Es aquí, en donde las figurasde Lissajous resultan de interés, pudiendo considerarse a las de los controlaresinternos como referencia.
A continuación se ven los tres casos separados según el rango de operación,considerando que 100 mV medidos representan un desplazamiento de 0,1 mm.
100 rpm a 6000 rpm De acuerdo a la segmentación que se realiza sobre esterango, se toman dos puntos de operación correspondientes, cada uno, auna subregión diferente. Estos son 3050 rpm y 5000 rpm, respectivamente.
La Fig. 3.16 muestra la respuesta obtenida para la subregión baja, de100 rpm a 3500 rpm y la 3.17, la respuesta para la subregión alta, de 3000
rpm a 6000 rpm. Es importante mencionar que, en este caso, se superó elrendimiento del compensador interno en la región baja. Sin embargo, parala región alta los desempeños son equiparables.
100 rpm a 7500 rpm En esta región los dos puntos de operación elegidos son3800 rpm y 6000 rpm.
La Fig. 3.18 muestra la respuesta obtenida para la subregión baja, de 100
rpm a 5100 rpm y la 3.19, para la región alta, de 4900 rpm a 7500 rpm.
En este caso, el comentario es el mismo que se hizo para la región anterior,i.e. el desempeño en la región baja es superior al de la región alta, siemprecontrastando con los compensadores internos.
3000 rpm a 5000 rpm En esta región los dos puntos de operación elegidosson 3000 rpm y 5000 rpm.
La Fig. 3.20 muestra la respuesta obtenida para la subregión baja, de 3000
rpm a 4100 rpm y la 3.21, para la región alta, de 3900 rpm a 5000 rpm.
[ 5 de julio de 2010 at 14:57 ]
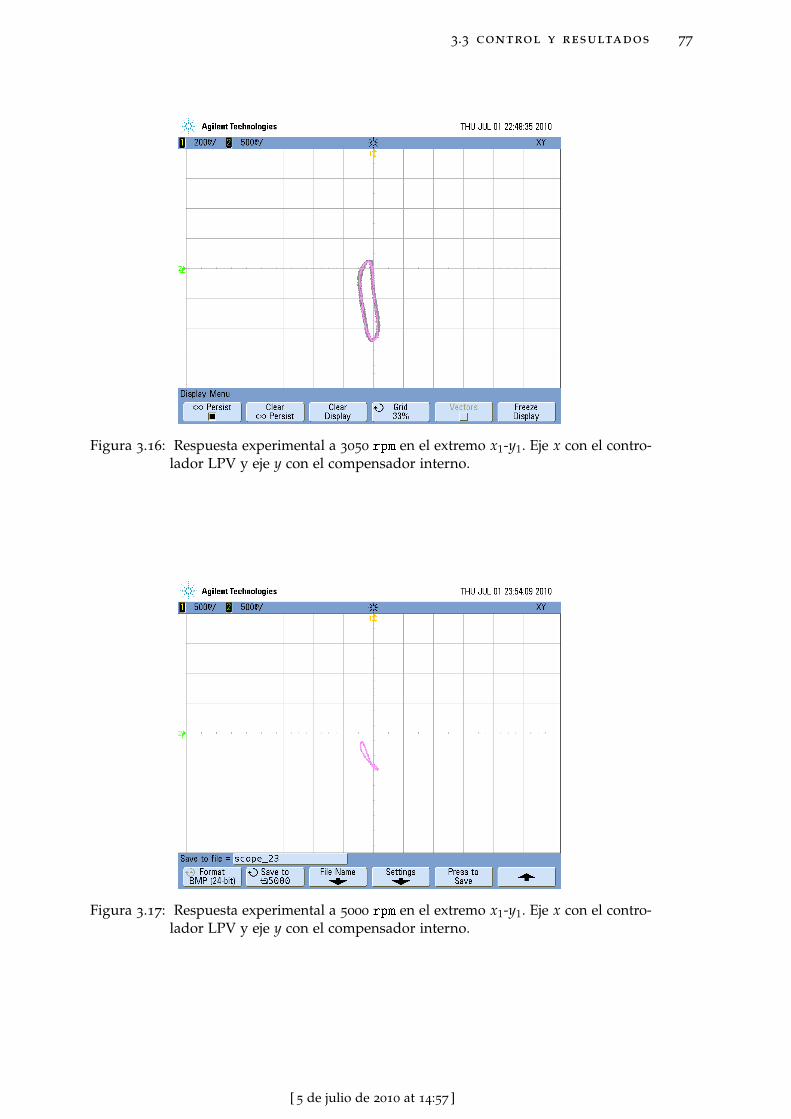
3.3 control y resultados 77
Figura 3.16: Respuesta experimental a 3050 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
Figura 3.17: Respuesta experimental a 5000 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
[ 5 de julio de 2010 at 14:57 ]

78 suspensión magnética controlada por conmutación lpv
Figura 3.18: Respuesta experimental a 3800 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
Figura 3.19: Respuesta experimental a 6000 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
[ 5 de julio de 2010 at 14:57 ]
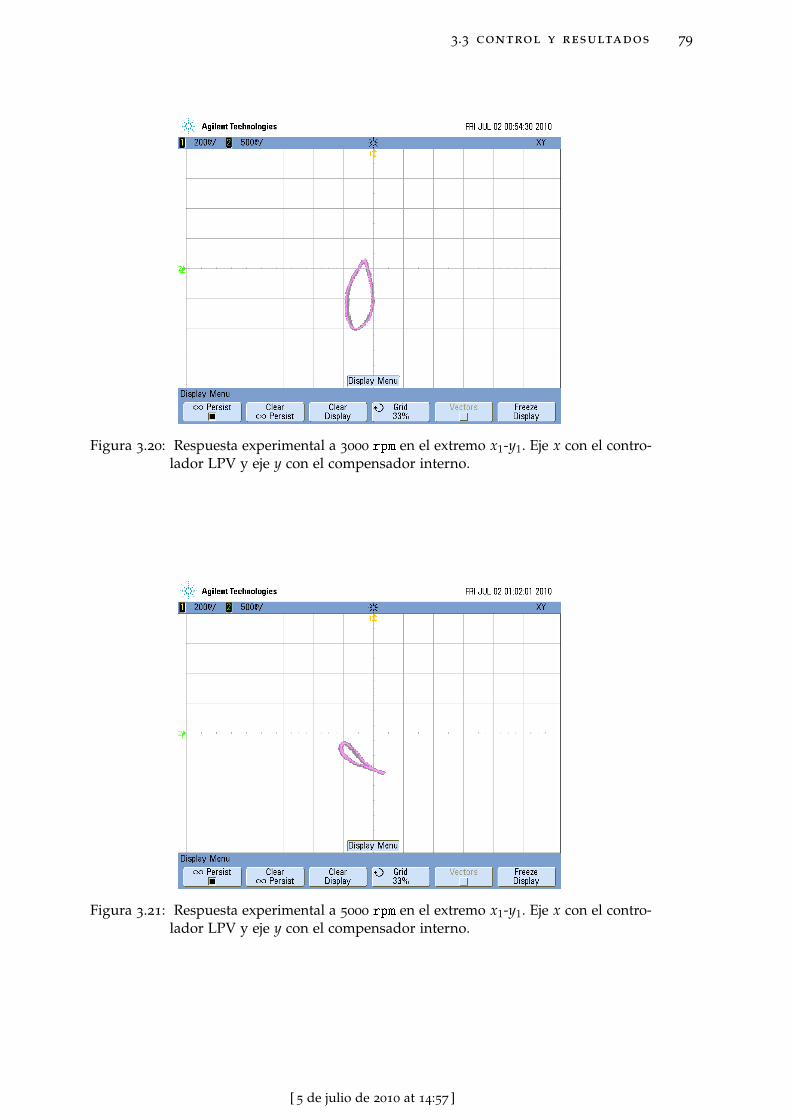
3.3 control y resultados 79
Figura 3.20: Respuesta experimental a 3000 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
Figura 3.21: Respuesta experimental a 5000 rpm en el extremo x1-y1. Eje x con el contro-lador LPV y eje y con el compensador interno.
[ 5 de julio de 2010 at 14:57 ]
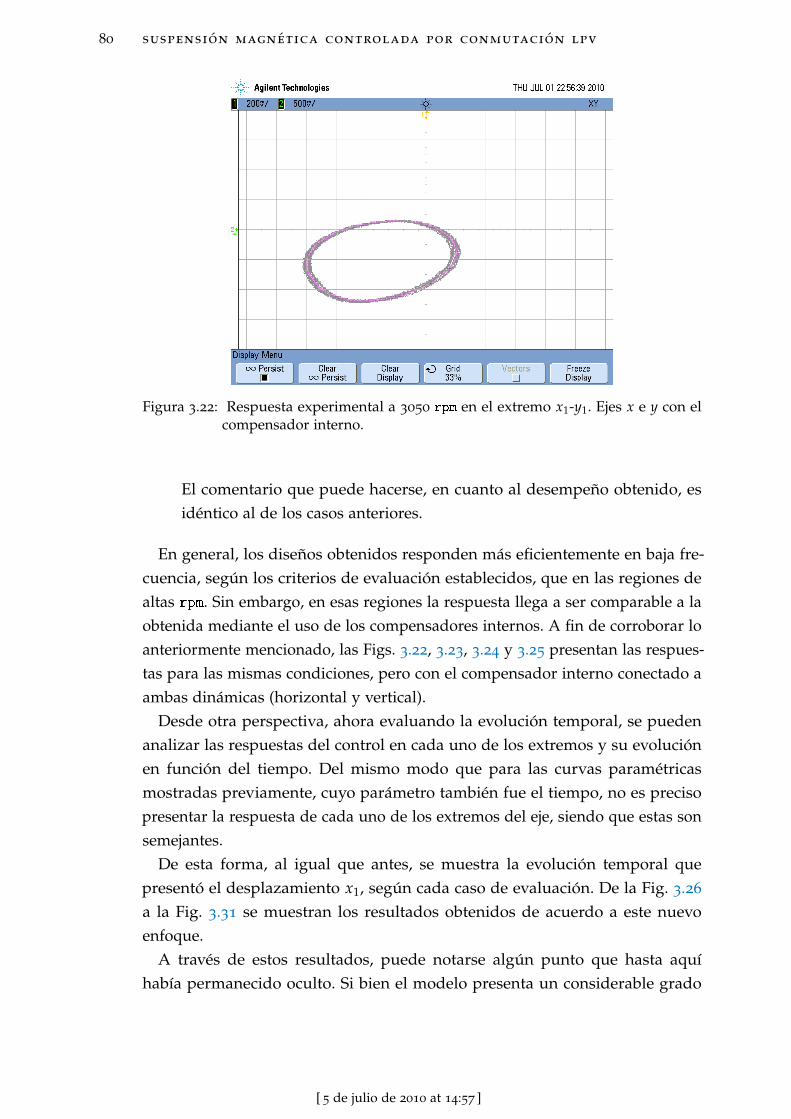
80 suspensión magnética controlada por conmutación lpv
Figura 3.22: Respuesta experimental a 3050 rpm en el extremo x1-y1. Ejes x e y con elcompensador interno.
El comentario que puede hacerse, en cuanto al desempeño obtenido, esidéntico al de los casos anteriores.
En general, los diseños obtenidos responden más eficientemente en baja fre-cuencia, según los criterios de evaluación establecidos, que en las regiones dealtas rpm. Sin embargo, en esas regiones la respuesta llega a ser comparable a laobtenida mediante el uso de los compensadores internos. A fin de corroborar loanteriormente mencionado, las Figs. 3.22, 3.23, 3.24 y 3.25 presentan las respues-tas para las mismas condiciones, pero con el compensador interno conectado aambas dinámicas (horizontal y vertical).
Desde otra perspectiva, ahora evaluando la evolución temporal, se puedenanalizar las respuestas del control en cada uno de los extremos y su evoluciónen función del tiempo. Del mismo modo que para las curvas paramétricasmostradas previamente, cuyo parámetro también fue el tiempo, no es precisopresentar la respuesta de cada uno de los extremos del eje, siendo que estas sonsemejantes.
De esta forma, al igual que antes, se muestra la evolución temporal quepresentó el desplazamiento x1, según cada caso de evaluación. De la Fig. 3.26
a la Fig. 3.31 se muestran los resultados obtenidos de acuerdo a este nuevoenfoque.
A través de estos resultados, puede notarse algún punto que hasta aquíhabía permanecido oculto. Si bien el modelo presenta un considerable grado
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 81
Figura 3.23: Respuesta experimental a 4000 rpm en el extremo x1-y1. Ejes x e y con elcompensador interno.
Figura 3.24: Respuesta experimental a 5000 rpm en el extremo x1-y1. Ejes x e y con elcompensador interno.
[ 5 de julio de 2010 at 14:57 ]
82 suspensión magnética controlada por conmutación lpv
Figura 3.25: Respuesta experimental a 6000 rpm en el extremo x1-y1. Ejes x e y con elcompensador interno.
Figura 3.26: Respuesta experimental a 3050 rpm del desplazamiento x1. Región de 100 a6000 rpm.
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 83
Figura 3.27: Respuesta experimental a 5000 rpm del desplazamiento x1. Región de 100 a6000 rpm.
Figura 3.28: Respuesta experimental a 3800 rpm del desplazamiento x1. Región de 100 a7500 rpm.
[ 5 de julio de 2010 at 14:57 ]

84 suspensión magnética controlada por conmutación lpv
Figura 3.29: Respuesta experimental a 6000 rpm del desplazamiento x1. Región de 100 a7500 rpm.
Figura 3.30: Respuesta experimental a 3000 rpm del desplazamiento x1. Región de 3000
a 5000 rpm.
[ 5 de julio de 2010 at 14:57 ]

3.3 control y resultados 85
Figura 3.31: Respuesta experimental a 5000 rpm del desplazamiento x1. Región de 3000
a 5000 rpm.
de linealidad, en algunas de las figuras anteriores se perciben efectos productode la denominada distorsión no lineal. Recordamos que ese efecto oscilatorioobservado en la salida del sistema, es producido por la fuerza excéntrica decarácter sinusoidal a la cual el eje se ve sometido.
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]

4C O N C L U S I O N E S
4.1 respecto de los algoritmos utilizados
La conclusión más saliente del presente trabajo de investigación, está relacionadacon la viabilidad práctica de la técnica de Switching LPV de Bianchi y SánchezPeña [6]. Esta viabilidad se refleja en los costos computacionales involucradospara la puesta en funcionamiento del controlador. Uno de estos costos es fuerade línea, o bien off-line, es decir, en la instancia de resolución del problema deoptimización correspondiente, planteado en términos de LMI’s. El otro es enlínea, o bien on-line, que comprende la implementación digital del controladormientras está corriendo. Respecto de estos costos, se puede decir para el métodoen cuestión, que:
off-line El proceso de síntesis, exhibe una carga computacional aceptable,equiparable a los métodos clásicos de Becker y Packard [5], Ghersin ySánchez Peña [16] o bien los más recientes, como el de Scherer [34] o bienWu y Dong [46] y Ghersin y Sánchez Peña [17], para el caso particular enel que se usan, con una única función cuadrática de Lyapunov (SQLF).
on-line La implementación digital de los controles no presenta mayores di-ficultades respecto de los puestos en práctica en Ghersin [13]. La ley deconmutación por histéresis mostró ser apropiada para la aplicación alsistema de suspensión magnética.
La puesta en práctica del método de Switching mencionado, es propicia ademáspara compararla con resultados como el de Lu y Wu [23]. En los dos aspectoscomputacionales mencionados anteriormente, en línea y fuera de linea, el costocomputacional es sensiblemente menor. En especial off-line, lo que más significa-tivamente inclina la balanza, en favor del método de Bianchi y Sánchez Peña [6],es que prescribe la utilización de SQLF’s. Esto es un requerimiento técnico, quese debe a que el análisis de estabilidad del sistema se hace por medio de unaSQLF.
Mientras tanto, métodos como el de Lu y Wu [23], prescriben la utilizaciónde PDLF’s. Para tener una idea de como pueden dispararse los costos computa-cionales off-line en problemas LPV, al utilizar PDLF’s, puede citarse a Ghersin
87
[ 5 de julio de 2010 at 14:57 ]
88 conclusiones
[13]. Allí se menciona como en un problema práctico como el control de suspen-sión magnética activa, puede pasarse de un problema de LMI’s con 400 variablesde decisión, a uno con varias miles de variables de decisión para el caso dePDLF’s. Más aun, teniendo en cuenta que para un problema de control LPVswitcheado, el método de Lu y Wu [23], requiere la resolución simultánea paratodas las regiones Pi (ver la sección 2.5), el costo computacional off-line, se puedehacer no factible o bien impráctico.
Por el lado del costo computacional on-line, no hay diferencias remarcablesentre los distintos métodos mencionados. Debe hacerse la salvedad de que en elcaso en que se utilizan PDLF’s, se debe elegir una forma para estas, de maneratal que los controladores resultantes resulten válidos en la práctica (ver Apkarian[1]), es decir, controladores que no precisan de la derivada del parámetro θ parasu implementación.
Desde el punto de vista teórico, un controlador LPV basado en SQLF’s toleravariaciones del parámetro discontinuas. Por su parte, las técnicas basadas enPDLF’s precisan una cota para el módulo de la derivada temporal de θ. Enambos casos, desde el punto de vista teórico, las matrices del controlador LPVse actualizan en todo instante de tiempo.
Cuando se pasa a la implementación digital, mediante algún método dedigitalización (ver Apkarian [1]), lo ideal es actualizar el controlador en todoslos instantes de muestreo, cosa que en muchos casos prácticos no es necesario.Por ejemplo, en el ejemplo del control de suspensión magnética del Cap. 3, elsampling rate del controlador es de 8 KHz, mientras que la actualización de lasmatrices del controlador se hace con una periodicidad de 20 Hz.
Ya sea que el controlador venga de un método que usa SQLF’s, o bien PDLF’s,en cuyo caso se debe contar necesariamente con una cota para la derivadatemporal de θ, la tasa a la cual se actualiza el control LPV suele determinarse enbase a ensayos y/o simulaciones.
Como desventajas del método de Bianchi y Sánchez Peña [6] respecto de losdel tipo de Lu y Wu [23], puede decirse que desde el punto de vista teórico, usarSQLF’s es más conservador. En Wu et al. [47], se propone inclusive un ejemplosimple, de un sistema cuya estabilidad no se puede garantizar por medio deuna SQLF y sin embargo si se puede por medio de una PDLF. No obstante, estoes infrecuente y la validez práctica de los métodos LPV con SQLF’s es extensa.Debe remarcarse que, si la estabilización cuadrática de la planta, por mediode una realimentación de estados LPV para todo el conjunto de variación delparámetro P fracasa, el método de Bianchi y Sánchez Peña [6] no ofrece remedioalguno.
[ 5 de julio de 2010 at 14:57 ]
4.2 respecto del control del sistema de suspensión magnética 89
4.2 respecto del control del sistema de suspensión magnética
Es muy significativa la mejora en el desempeño del sistema, especialmente enlo que respecta al rango de operación factible obtenido. También es interesantedestacar, que se obtuvieron valores de norma LPV inducida, mejores en unorden del 50 %, respecto del trabajo previo. Se tratarán estos dos aspectos porseparado.
Mejoras en el Rango
Es debido remarcar, que el cambio llevado a cabo, sobre la representación envariables de estado para el peso LPV W1(r, r2, s) (ver la Fig. 3.6) fue clave, parapoder extender el rango de operación factible. Este solo cambio, introducidorespecto del trabajo publicado en Ghersin et al. [15], permitió sintetizar uncontrolador válido para todo el rango variación del parámetro (100
1 a 10000
rpm).Un aspecto práctico conocido en el área del Control Robusto H∞, es que las
funciones de peso que se utilizan para la especificación de una planta aumen-tada, deben ser estables, considerando que se hallan fuera del camino de larealimentación y son incluidas en las plantas aumentadas, a fin de complementarel planteo de los problemas de control con información frecuencial. En sistemasLTI, alcanza con verificar que la parte real de los polos de la función de transfer-encia que se utiliza como peso, tengan parte real negativa. En sistemas LPV esnecesario en cambio, verificar estabilidad cuadrática, y como quedó demostradocon este problema, la realización en variables de estado utilizada anteriormentepara el peso W1, revelaba problemas numéricos para rangos mayores a las 1500
rpm. El cambio en la realización en variables de estado del peso W1, que esademás el peso que da a la planta aumentada el carácter de LPV, hizo que estepeso fuera numéricamente, cuadráticamente estable.
A partir de esta mejora sustancial en el rango cubierto, lograda a partir delpeso, se pasó a poner en práctica la técnica de Switching, para mejorar la normaLPV del sistema.
1 El “rango verdadero” del parámetro, que viene especificado en el manual del MBC500, es 0 a10000 rpm. Se ha tomado como “valor mínimo práctico” 100 rpm por razones numéricas.
[ 5 de julio de 2010 at 14:57 ]
90 conclusiones
Mejoras en la Norma LPV
Como ha sido mencionado en el Cap. 1, el LPV hereda del Control Óptimo H∞
importantes aspectos en lo referido al planteo de los problemas. Además, paratodo problema práctico LPV, siempre son una referencia obligada los diseñosLTI a través del método del H∞, pero “congelando” el parámetro. En este caso,“congelar” el parámetro, sería lo mismo que hacer el diseño de un control parael sistema de suspensión magnética MBC500, operando a una velocidad derotación fija.
Teniendo en cuenta que el H∞ es una técnica que da condiciones necesarias ysuficientes para la existencia (o no) de un Controlador Estabilizante, que ademásminimice la norma de lazo cerrado con la cual se evalúa la performance, quedaclaro que un diseño LPV nunca puede obtener una mejor norma LPV que unH∞ “congelado”.
En el caso del nuevo control para la dinámica horizontal del MBC500, seobtienen γ’s que han sido del orden de los obtenidos por los diseños H∞ “conge-lados” (ver la tabla 3.2). Para esto ha sido fundamental la técnica de switching, yaque sin ella, y a pesar de las mejoras por el rango de variación del parámetro,no se podían bajar mucho los γ’s, respecto del diseño de Ghersin et al. [15]. Esteviene a justificar el uso de técnicas de Switching LPV en esta aplicación.
4.3 investigaciones próximas
En Algoritmos
Desde el punto de vista de los algoritmos, hay varios aspectos que deben pulirse.Concretamente, el uso de métodos LPV basados en Multiplicadores de BloqueLleno (FBM) usados en Ghersin [13], tienen el potencial de ofrecer un métodomenos conservador y además, aplicable a una variedad mayor de sistemasLPV, considerando que acepta dinámicas LPV, en las cuales la dependencia delos parámetros es lineal fraccionaria (LFT), versus la dependencia afín en losparámetros que se ha manejado hasta ahora. El trabajo requerido en términos deteoría a tal efecto no es exagerado, teniendo en cuenta que se deben reformularlos resultados de Xie y Eisaka [48] para sistemas LPV/LFT.
El tratamiento en la forma LFT, permitiría abordar el problema de la reducciónde orden del controlador, con vista a poder implementar el controlador para los4 DOF del MBC500.
[ 5 de julio de 2010 at 14:57 ]

4.3 investigaciones próximas 91
En el MBC500
El objetivo pendiente respecto del MBC500 es completar el control en 4 DOF.A tal efecto, se pensaría en la mencionada reducción de orden de un posiblecontrolador de 48 estados MIMO de 4x4 entradas/salidas.
También se presenta como potencial, el cambio de plataforma para la imple-mentación del sistema digital de control a una plataforma FPGA, que permitamanejar un alto número de estados en el controlador (48).
[ 5 de julio de 2010 at 14:57 ]

[ 5 de julio de 2010 at 14:57 ]

B I B L I O G R A F Í A
[1] Apkarian P (1997). On the Discretization of LMI Synthesized Linear Parameter-Varying Controllers. Automatica, 4(33):655–661. (Cited on page 88.)
[2] Apkarian P y Adams RJ (1998). Advanced Gain-Scheduled Techniques for Uncer-tain Systems. IEEE Transactions on Control Systems Technology, 6(1):21–32.(Cited on pages 14 and 24.)
[3] Apkarian P y Gahinet P (1995). A Convex Characterization of gain–scheduledH∞ controllers. IEEE Transactions on Automatic Control, 5(40):853–864.(Cited on pages 1 and 2.)
[4] Becker GS (1993). Quadratic Stability and Performance of Linear ParameterDependent Systems. Tesis Doctoral, University of California at Berkeley.(Cited on page 13.)
[5] Becker GS y Packard A (1994). Robust Performance of LPV Systems usingParametrically-dependent Linear Feedback. Systems and Control Letters, 23:205–215. (Cited on pages 1, 2, 4, 5, 6, 8, 9, 13, 15, 17, 18, and 87.)
[6] Bianchi FD y Sánchez Peña RS (2010). A novel design approach for switchedLPV controllers. International Journal of Control. En revisión. (Cited onpages 4, 6, 8, 35, 38, 39, 44, 45, 67, 87, and 88.)
[7] Blanchini F, Miani S y Mesquine F (2009). A Separation Principle for LinearSwitching Systems and Parametrization of All Stabilizing Controllers. IEEE Trans.on Automatic Control, 54(2):279–292. (Cited on page 35.)
[8] Branch MA y Grace A (1996). Matlab Optimiztion Toolbox. The Mathworks,Inc. (Cited on page 57.)
[9] Chilali M y Gahinet P (1996). H∞ control Design with Pole PlacementConstraints: An LMI Approach. IEEE Transactions on Automatic Control,41(3):358–367. (Cited on pages 3, 9, 20, 21, 23, 24, and 25.)
[10] Dullerud GE y Paganini F (2000). A Course in Robust Control Theory. Springer-Verlag. (Cited on pages 2, 26, and 27.)
93
[ 5 de julio de 2010 at 14:57 ]
94 bibliografía
[11] Gahinet P y Apkarian P (1994). An LMI Apporach toH∞ Control. InternationalJournal of Robust and Nonlinear Control, 4(8):421–448. (Cited on pages 2,8, 9, 15, 17, and 19.)
[12] Gahinet P, Nemirovski A, Laub AJ y Chilali M (1995). LMI Control Toolbox.The Mathworks, Inc. (Cited on pages 2, 15, and 16.)
[13] Ghersin AS (2009). Implementation of Advanced Linear Parameter ControlTechniques. Tesis Doctoral, Faculty of Engineering University of BuenosAires. (Cited on pages xvii, 1, 5, 6, 8, 43, 44, 45, 63, 64, 68, 69, 73, 87, 88,and 90.)
[14] Ghersin AS, Smith RS y Sánchez Peña RS (2007). Identification and Control:the Gap between Theory and Practice, capítulo Classical, Robust and LPVControl of a Magnetic-bearing Experiment. Springer. (Cited on pages 5, 6,43, and 45.)
[15] Ghersin AS, Smith RS y Sánchez Peña RS (2009). LPV CONTROL OF AMAGNETIC BEARING EXPERIMENT. Latin American Applied Research.In press. (Cited on pages 5, 6, 43, 44, 45, 62, 64, 89, and 90.)
[16] Ghersin AS y Sánchez Peña RS (2002). LPV Control of a 6 DOF vehicle. IEEETransactions on Control Systems Technology, 10(6). (Cited on pages 2, 4, 6,9, 44, and 87.)
[17] Ghersin AS y Sánchez Peña RS (2009). Applied LPV Control with Full BlockMultipliers and Eigenvalue Assignment. Journal of Control Science and Engi-neering. Submitted for review 1/7/2009 to Hindawi Publishing. (Cited onpages 3, 4, and 87.)
[18] Hespanha JP y Morse AS (2002). Switching between stabilizing controllers.Automatica, 38(11):1905–1917. (Cited on pages 3 and 35.)
[19] Knospe C y Collins E (1996). Introduction to the Special Issue on Magnetic Bear-ing Control [Guest Editorial]. Control Systems Technology, IEEE Transactionson, 4(5):481. (Cited on page 43.)
[20] Lee L (1997). Identification and robust control of linear parameter-varying systems.Tesis Doctoral, University of California at Berkeley. (Cited on page 35.)
[21] Liberzon D y Morse AS (1999). Basic Problems in Stability and Design ofSwitched Systems. IEEE Control Systems Magazine. (Cited on pages 3
and 36.)
[ 5 de julio de 2010 at 14:57 ]
bibliografía 95
[22] Lu B, Choi H y Buckner G (2006). LPV control design and experimentalimplementation for a magnetic bearing system. En American Control Conference,2006, páginas 6 pp.–. (Cited on page 5.)
[23] Lu B y Wu F (2004). Switching LPV control designs using multiple parameter-dependent Lyapunov functions. Automatica, 40(11):1973–1980. (Cited onpages 3, 4, 37, 87, and 88.)
[24] Lu B, Wu F y Kim S (2006). Switching LPV Control of an F-16 Aircraft viaController State Reset. IEEE Transactions on Control Systems Technology,14(2):267–277. (Cited on pages 4 and 37.)
[25] Magnetic Moments, LLC (1999). MBC500 Manual. (Cited on pages 46, 50,57, and 58.)
[26] Matsumura F, Namerikawa T, Hagiwara K y Fujita M (1996). Application ofGain ScheduledH∞ Robust Controllers to a Magnetic Bearing. IEEE Transactionson Control Systems Technology, 4(5):484–493. (Cited on pages 5 and 44.)
[27] Morse N, Smith R y Paden B (1996). Magnetic Bearing Lab # 1: AnalyticalModeling of a Magnetic Bearing System. (Cited on pages 49, 50, 55, and 58.)
[28] Morse Thibeault N y Smith RS (2002). Magnetic bearing measurement configu-rations and associated robustness and performance limitations. ASME Journalof Dynamic Systems, Measurement and Control, 124(4):589–598. (Cited onpage 62.)
[29] Packard A (1994). Gain Scheduling via LFTs. Systems and Control Letters,22:79–92. (Cited on pages 1 and 2.)
[30] Paden B, Morse N y Smith R (1996). Magnetic Bearing Experiment for In-tegrated Teaching and Research Laboratories. En Proceedings of the 1996 IEEEConference on Control Applications. (Cited on pages 43, 46, 50, 55, and 57.)
[31] Rugh WJ (1991). Analytical Framework for Gain Scheduling. IEEE ControlSystems Magazine. (Cited on page 1.)
[32] Scherer C, Gahinet P y Chilali M (1997). Multiobjective Output-FeedbackControl via LMI Optimization. IEEE Transactions on Automatic Control,42(7):896–911. (Cited on page 24.)
[33] Scherer CW (1999). Advances in linear matrix inequality methods in control,capítulo 10. SIAM. (Cited on page 2.)
[ 5 de julio de 2010 at 14:57 ]
96 bibliografía
[34] Scherer CW (2001). LPV Control and full block multipliers. Automatica,37(3):361–375. (Cited on pages 1, 2, and 87.)
[35] Seron MM, Braslavsky JH y Goodwin GC (1997). Fundamental Limitations inFiltering and Control. Springer-Verlag, London. (Cited on page 62.)
[36] Shamma J (1988). Analysis and Design of Gain Scheduled Control Systems. TesisDoctoral, Dept. of Mechanical Engineering, MIT. (Cited on pages 1 and 7.)
[37] Shamma J y Athans M (1992). Gain Scheduling: Potential Hazards and PossibleRemedies. IEEE Control Systems Magazine, 12(3):101–107. (Cited on pages 1
and 7.)
[38] Smith RS (1998). Closed-loop Identification of Flexible Structures: An Experimen-tal Example. AIAA Journal of Guidance, Control and Dynamics, 21(3):435–440. (Cited on page 56.)
[39] Sánchez Peña RS, Quevedo J y Puig V, editores (2007). Identification andControl: the Gap between Theory and Practice. Springer. (Cited on pages 6
and 46.)
[40] Sánchez Peña RS y Sznaier M (1998). Robust Systems Theory and Applications.John Wiley & Sons, Inc. (Cited on pages 2, 28, and 29.)
[41] Sturm JF (1999). Using SeDuMi 1.02, a MATLAB toolbox for optimization oversymmetric cones. Optimization Methods and Software, 11–12:625–653. Ver-sion 1.1R3 available from http://sedumi.mcmaster.ca. (Cited on page 2.)
[42] Toh KC, Tütüncü RH y Todd MJ (2007). SDPT3 - a MAT-LAB software package for semidefinite-quadratic-linear programming.http://www.math.cmu.edu/�reha/sdpt3.html. (Cited on page 2.)
[43] Wu F (2000). An unified framework for LPV system analysis and control synthesis.En Proceedings of the 39th IEEE Conference on Decision and Control, tomo 5,páginas 4578–4583. (Cited on pages 1, 2, and 3.)
[44] Wu F (2001). A generalized LPV system analysis and control synthesis framework.International Journal of Control, 74(7):745–75. (Cited on pages 1, 2, 3,and 15.)
[45] Wu F (2001). Switching LPV control design for magnetic bearing systems. EnControl Applications, 2001. (CCA ’01). Proceedings of the 2001 IEEE InternationalConference on, páginas 41–46. (Cited on page 5.)
[ 5 de julio de 2010 at 14:57 ]
bibliografía 97
[46] Wu F y Dong K (2006). Gain-scheduling control of LFT systems using parameter-dependent Lyapunov functions. Automatica, 42(1):39–50. (Cited on pages 1, 2,3, 44, and 87.)
[47] Wu F, Yang XH, Packard A y Becker GS (1996). Induced L2–Norm Control forLPV Systems with Bounded Parameter Variation Rates. International Journal ofNonlinear and Robust Control, 6(9-10):983–998. (Cited on pages 2, 3, 4, 8,11, 12, 13, 15, 37, and 88.)
[48] Xie W y Eisaka T (2004). Design of LPV control systems based on Youla parame-terisation. IEE Proceedings Control Theory and Applications, 151(4):465–472.(Cited on pages 4, 6, 8, 30, 31, 34, and 90.)
[ 5 de julio de 2010 at 14:57 ]


















