Filtros IIR Resumen
8
Filtros IIR Resumen Resumen para ejercicios de cálculo 1. Método de la transformación de filtros analógicos. El método permite obtener los coeficientes de un filtro digital calculando uno analógico y transformándolo. Aprovecha la experiencia acumulada en diseño analógico. Los pasos son: Especificaciones Conversión a prototipo pasa-bajos o LP→LP o HP→LP o BP→LP o SB→LP Elección del tipo de Transformación o Transformación Invariante al Impulso o Transformación Bilineal o Otras: Transformación de la Derivada, Transformada Z adaptada, etc. Transformación D/C o Frecuencias de corte o Rizado Elección del filtro analógico o Butterworth o Chebysehv Tipo I o Chebysehv Tipo II o Cauer (elíptico) Estimación de parámetros o Orden o Frecuencia de corte Cálculo de la transferencia del prototipo o Forma ceros-polos-ganancia o Forma de coeficientes Conversión a la banda pasante deseada o LP→LP o LP→HP o LP→BP o LP→SB Transformación C/D 1.1. Especificaciones. La descripción de las especificaciones se realiza tal como fue explicado en la sección dedicada a filtros digitales. 1.2. Conversión de la banda pasante. Las formas de conversión entre el prototipo pasabajos y la banda pasante deseada fueron explicadas anteriormente. 1.3. Elección del tipo de transformación. La elección del tipo de transformación se realiza considerando la forma de la respuesta que se requiere, ya que cada método tiene ventajas y limitaciones respecto al resto. Las dos transformaciones más utilizadas son la Invariante al Impulso y la Bilineal. La Transformación Invariante al Impulso permite definir un sistema de tiempo discreto con respuesta impulsiva h[n] muestreando la respuesta al impulso h(t) de un sistema de tiempo continuo. Para esto, considérese una transferencia H(s) obtenida como la Transformada de Laplace de la respuesta al impulso h(t) de un sistema de tiempo continuo. Sea una transferencia H(z) calculada como la Transformada Z de la respuesta al impulso h[n] de un sistema de tiempo discreto. Si h[n] es el resultado del muestreo de h(t), se puede establecer una correspondencia entre los términos debidos a cada polo p k de la transferencia H(s) expresada en una suma de fracciones parciales, y los términos debidos a cada polo e PkTm de la transferencia H(z) expresada de igual forma. () () k pt k k ht ut Ae = ∑ () k k k A Hs s p = − ∑ [ ] ( ) ≡ = ∑ k m p nT m k k hn h nT Ae − = − ∑ 1 () 1 k m k pT k A Hz e z Figura 1: Transformación invariante al impulso. TL TII C/D TZ
-
Upload
henry-calle -
Category
Documents
-
view
58 -
download
1
Transcript of Filtros IIR Resumen

Filtros IIR
Resumen
Resumen para ejercicios de cálculo
1. Método de la transformación de filtros analógicos. El método permite obtener los coeficientes de un filtro digital calculando uno analógico y
transformándolo. Aprovecha la experiencia acumulada en diseño analógico. Los pasos son:
Especificaciones
Conversión a prototipo pasa-bajos o LP→LP o HP→LP o BP→LP o SB→LP
Elección del tipo de Transformación o Transformación Invariante al Impulso o Transformación Bilineal o Otras: Transformación de la Derivada, Transformada Z adaptada, etc.
Transformación D/C o Frecuencias de corte o Rizado
Elección del filtro analógico o Butterworth o Chebysehv Tipo I o Chebysehv Tipo II o Cauer (elíptico)
Estimación de parámetros o Orden o Frecuencia de corte
Cálculo de la transferencia del prototipo o Forma ceros-polos-ganancia o Forma de coeficientes
Conversión a la banda pasante deseada o LP→LP o LP→HP o LP→BP o LP→SB
Transformación C/D
1.1. Especificaciones. La descripción de las especificaciones se realiza tal como fue explicado en la sección
dedicada a filtros digitales.
1.2. Conversión de la banda pasante. Las formas de conversión entre el prototipo pasabajos y la banda pasante deseada
fueron explicadas anteriormente.
1.3. Elección del tipo de transformación. La elección del tipo de transformación se realiza considerando la forma de la respuesta
que se requiere, ya que cada método tiene ventajas y limitaciones respecto al resto. Las dos transformaciones más utilizadas son la Invariante al Impulso y la Bilineal.
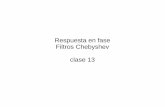
La Transformación Invariante al Impulso permite definir un sistema de tiempo discreto con respuesta impulsiva h[n] muestreando la respuesta al impulso h(t) de un sistema de tiempo continuo. Para esto, considérese una transferencia H(s) obtenida como la Transformada de Laplace de la respuesta al impulso h(t) de un sistema de tiempo continuo. Sea una transferencia H(z) calculada como la Transformada Z de la respuesta al impulso h[n] de un sistema de tiempo discreto. Si h[n] es el resultado del muestreo de h(t), se puede establecer una correspondencia entre los términos debidos a cada polo pk de la transferencia H(s) expresada en una suma de fracciones parciales, y los términos debidos a cada polo ePkTm de la transferencia H(z) expresada de igual forma.
( ) ( ) kp tk
kh t u t A e= ∑
( ) k
kk
AH ss p
=−∑
[ ] ( )≡ = ∑ k mp nTm k
kh n h nT A e
−=
−∑ 1( )1 k m
kp T
k
AH ze z
Figura 1: Transformación invariante al impulso.
TL
TII C/D
TZ

104
Por otra parte, la Transformación Bilineal permite pasar de un sistema de tiempo discreto a uno continuo y viceversa, mediante el cambio de variable establecido por dicha transformación matemática
−
−
+ ⎛ ⎞−= = ⎜ ⎟+⎝ ⎠−
1
1
1 2 1211
2
m
m m
T s zz o inversamente sT T zs
( )h t
( )−
−
⎛ ⎞⎛ ⎞−= ⎜ ⎟⎜ ⎟⎜ ⎟+⎝ ⎠⎝ ⎠
1
12 1
1m
zH s HT z
[ ]h n ( )
⎛ ⎞+⎜ ⎟= ⎜ ⎟
⎜ ⎟−⎜ ⎟⎝ ⎠
12
12
m
m
T sH z H T s
Figura 2: Transformación bilineal.
1.4. Transformación Discreto/Continuo. Las transformadas de Laplace y Z tienen por dominio a los planos s y z
respectivamente, donde dichas variables independientes pueden expresarse en función de la frecuencia angular como
ωσ= + Ω = js j y z e
Una vez elegido el tipo de transformación, se calculan las especificaciones en el otro
dominio. La relación que adquieren s y z dependen de la transformación elegida. La Transformación Invariante al Impulso establece una relación lineal de las escalas de
frecuencias de ambos dominios descripta por la relación del muestreo ω ωΩ = = Ω m
mo inversamente T
T
La linealidad en la relación permite que se mantenga la forma de la respuesta espectral entre uno y otro dominio. Con esta relación se calculan las especificaciones del filtro en el dominio transformado, para iniciar el cálculo del filtro analógico.
( )( )
( )( )
ω
ω
ω ωω ω
δ δ ω ω δ δ
δδ ω ω π
↔ Ω = ↔ Ω =
⎧ − ≤ ≤ + ≤ ≤ ⎧ − ≤ Ω ≤ + ≤ Ω ≤ Ω⎪ ⎪↔⎨ ⎨≤ Ω ≤ Ω ≤ Ω ≤ ∞≤ ≤ ≤ ≤⎪ ⎪⎩⎩
1 1 1 1
22
1 1 0 1 1 0
00
TII TIIp sp p s s
m m
jp TII p
j ss
T T
H e si H j si
H j siH e si
El muestreo requiere que el filtro analógico posea banda limitada para evitar el
solapamiento. Por eso, la limitación de la invarianza al impulso es la imposibilidad de diseñar filtros pasa-altos o rechaza-banda con este método.
A diferencia de la anterior, la Transformación Bilineal establece una relación no lineal en la escala de frecuencias de ambos dominios descripta por
ω ω⎛ ⎞ ⎛ ⎞Ω = = Ω⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2 22 2
m
m
Ttg y arctgT
La transformación del eje de frecuencia de tiempo continuo y de tiempo discreto es no
lineal. Por eso, sólo pueden diseñarse filtros en los que la modificación de la escala sea aceptable, por ejemplo, en el caso típico de filtros de banda plana. Esta es la única limitación que tiene el método, pero como la mayoría de los filtros son de banda plana, en general, esta restricción no constituye un inconveniente.
Luego de realizar la transformación de la escala de frecuencias, pueden expresarse las especificaciones del filtro en el dominio transformado para iniciar el cálculo del filtro analógico.
( )( )
( )( )
ω
ω
ω ωω ω
δ δ ω ω δ δδδ ω ω π
⎛ ⎞ ⎛ ⎞↔ Ω = ↔ Ω =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
⎧ − ≤ ≤ + ≤ ≤ ⎧ − ≤ Ω ≤ + ≤ Ω ≤ Ω⎪ ⎪↔⎨ ⎨≤ Ω ≤ Ω ≤ Ω ≤ ∞≤ ≤ ≤ ≤⎪ ⎪⎩⎩
1 1 1 1
22
2 22 2
1 1 0 1 1 0
00
TII TIIp sp p s s
m m
jp TII p
j ss
tg tgT T
H e si H j si
H j siH e si
1.5. Elección del filtro analógico
La elección del filtro analógico se realiza teniendo en cuenta si la forma de la respuesta
de alguno de los tipos de filtro se ajusta a las características requeridas. En este sentido se debe tener en cuenta si las bandas son monótonas o tienen rizado constante, y la magnitud del ancho de transición. En la tabla se resumen las características de cada filtro analógico.
TL
TB C/D
TZ

105
Butterworth Chebyshev Tipo I
Sólo polos Máximamente plana para Ω→0
Monótona decreciente 0<Ω
Sólo polos Rizado constante en Ω<Ωp
Monótona decreciente en Ωs<Ω
Chebysehv Tipo II Cauer
Polos sobre elipse Ceros sobre s=jΩ
Rizado constante en Ωs<Ω Monótona decreciente en Ω<Ωp
Zona de transición más estrecha para =N Rizado constante en Ωs<Ω y en Ω<Ωp
Tabla 1: Características de la respuesta de los distintos tipos de filtros analógicos usuales.
But
terw
orth
22
10
21
2
10 2
1 1log
1 1
2log s
p
N
δ
δ
⎛ ⎞⎛ ⎞−⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟
⎜ ⎟⎛ ⎞−⎜ ⎟⎜ ⎟⎝ ⎠⎝ ⎠=⎛ ⎞Ω⎜ ⎟Ω⎝ ⎠
2 2
2 21 2
1 11 11
p sc
N Nδ δ
=Ω ΩΩ =
⎛ ⎞ ⎛ ⎞− −⎜ ⎟ ⎜ ⎟−⎝ ⎠ ⎝ ⎠
Che
bysh
ev I
y II
( )2 2 22 2
12102 2
2
2 1
10 2
1 1 1log 1cosh
coshlog 1ss s
pp p
N
δ δ εεδ
εδ−
−
⎛ ⎞− + − +⎜ ⎟ ⎛ ⎞⎜ ⎟⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠= ≅
Ω⎛ ⎞ ⎛ ⎞Ω Ω ⎜ ⎟⎜ ⎟+ + Ω⎝ ⎠⎜ ⎟Ω Ω⎝ ⎠
( ) ' 3 1cH j dB sii εΩ=ΩΩ = − =
Cau
er
( )2 22
22
2 22
22
1 1
1
11
s
p
s
p
N
δ εδ
δ εδ
⎛ ⎞− +Ω⎛ ⎞ ⎜ ⎟ℑ ℑ⎜ ⎟ ⎜ ⎟Ω −⎝ ⎠ ⎜ ⎟⎝ ⎠=
⎛ ⎞ ⎛ ⎞Ω⎛ ⎞⎜ ⎟ℑ − ℑ⎜ ⎟⎜ ⎟⎜ ⎟Ω⎝ ⎠ −⎝ ⎠⎝ ⎠
Tabla 2: Estimación del orden y la frecuencia de corte de los filtros analógicos.
1.6. Estimación de parámetros Para el cálculo de los coeficientes del filtro analógico deben estimarse dos parámetros
que son la frecuencia de corte y el orden del filtro. Estos se obtienen armando un sistema de dos ecuaciones con dos incógnitas. Las dos ecuaciones son las expresiones de la respuesta espectral (con su correspondiente rizado) en los bordes de cada banda (es decir, a la frecuencia de corte de cada banda) y las dos incógnitas son los valores del orden del filtro y la frecuencia de corte mencionados.
Tipo Respuesta espectral Ubicación de los polos
But
terw
orth
22
1( )1
N
c
H jΩ =Ω⎛ ⎞+ ⎜ ⎟Ω⎝ ⎠
( )2 1
2 2 ; 0;1;2;...; 1j j k
Nk cs e e k Nπ π+
= Ω = −
Che
bysh
ev I
( )( )( )
( )( )( ) ( ) ( )
( ) ( )
2
2 2
1
1
1 1
0 1
1( ) 0 11
cos cos 1
cosh cosh 1
2
1
Nc
N
N N N
H j
N x xx
N x x
x x x
con x y x x
εε
−
−
+ −
Ω = ≤ ≤Ω⎛ ⎞+ Τ ⎜ ⎟Ω⎝ ⎠
⎧ ≤⎪Τ = ⎨>⎪⎩
Τ = Τ − Τ
Τ = Τ =
2
cos cos
;2
1 1 1ln
k k k
k
s sen sen jk k Z
N N
N
α β α βπ πα
εβε
= +
= + ∈
⎛ ⎞+ +⎜ ⎟= ± ⎜ ⎟⎝ ⎠
Che
bysh
ev II
2
2
2
2
1( ) 0 1
1
sN
c
sN
H j ε
ε
Ω = ≤ ≤Ω⎛ ⎞Τ ⎜ ⎟Ω⎝ ⎠+Ω⎛ ⎞Τ ⎜ ⎟Ω⎝ ⎠
2
cos cos
;2
1 1 1ln
k k k
k
s sen sen jk k Z
N N
N
α β α βπ πα
εβε
= +
= + ∈
⎛ ⎞+ +⎜ ⎟= ± ⎜ ⎟⎝ ⎠
Cau
er
2
2 2
2
2 20
1( ) 0 11
( )1
sN
c
N
H j
dxx sen
π
εε
θθ
Ω = ≤ ≤Ω⎛ ⎞+ ℑ ⎜ ⎟Ω⎝ ⎠
ℑ =−∫
Tabla 3: Respuesta espectral de los filtros analógicos.
Tipo Orden Frecuencia de corte

106
Para mayor comodidad, en la tabla se reproducen las expresiones de ambos parámetros, que surgen de resolver el sistema de ecuaciones mencionado anteriormente. En estas expresiones, intervienen los valores del rizado en las bandas, dados como especificaciones de nuestro filtro, y las frecuencias de corte de cada banda obtenida por medio de la transformación.
1.7. Cálculo de la transferencia del prototipo
Una vez estimado el orden y la frecuencia de corte del filtro analógico, puede calcularse
su respuesta espectral reemplazando estos valores en la expresión correspondiente vista en la tabla 2 para el tipo elegido. Para simplificar los cálculos, en primer lugar es conveniente calcular la respuesta de un filtro con el orden estimado, pero con frecuencia de corte unitaria, ΩC=1. Esto es lo que se conoce como prototipo pasabajos.
Luego, en el paso siguiente, se puede hacer el cambio a la frecuencia estimada en el paso anterior, donde se realiza la transformación a la banda pasante deseada. La respuesta espectral generalmente escrita como una expresión racional de productos de factores que contienen a los ceros, a los polos y a una constante, se puede llevar a la forma de función de transferencia para obtener explícitamente los coeficientes del filtro.
Figura 3: Estimación del orden y la frecuencia de corte de los filtros analógicos.
1.8. Conversión a la banda pasante deseada
El cambio de los coeficientes del filtro prototipo pasabajos a la banda pasante deseada
se puede realizar en el dominio continuo, es decir, antes de hacer la transformación continua/discreta, o bien, en el dominio discreto, después de hacer dicha transformación. En caso de hacer el diseño manualmente, la primera forma es más recomendable por su sencillez. En la tabla se presentan las expresiones de la conversión para ambos casos.
Conversión En dominio s En dominio z
LP LP 1'
'c
cs s s↔ = Ω
Ω
( )( )( )( )
11 1
1
' / 2'
1 ' / 2senz az z a
az senω ωω ω
−− −
−
−−↔ = =− +
LP HP ' 'ccs s
sΩ↔ = Ω
( )( )( )( )
11 1
1
cos ' / 2'
1 cos ' / 2z az z a
azω ωω ω
−− −
−
−−↔ = =− +
LP BP ( )2
' c U L
U L
ss ss
Ω + Ω Ω↔ =Ω − Ω
2 11 21 1
2 12 1
1 2
'1
2 1 cot1 1 2 2
U L
z a z az za z a z
K Ka a K tgK K
α ω ω ω
− −− −
− −
+ +↔ =+ +
− −⎛ ⎞ ⎛ ⎞= = = ⎜ ⎟ ⎜ ⎟+ + ⎝ ⎠ ⎝ ⎠
LP SB ( )2'
U Lc
U Ls s s
sΩ − Ω
↔ = Ω+ Ω Ω
2 11 21 1
2 12 1
1 2
'1
2 1 tan1 1 2 2
U L
z a z az za z a z
K Ka a K tgK K
α ω ω ω
− −− −
− −
+ +↔ =+ +
− −⎛ ⎞ ⎛ ⎞= = = ⎜ ⎟ ⎜ ⎟+ + ⎝ ⎠ ⎝ ⎠
Tabla 4: Conversión a la banda pasante deseada en el dominio s y en el dominio z.
1.9. Transformación Continuo/Discreto
Una vez calculado el filtro, puede realizarse la transformación al dominio discreto según
la transformación elegida obteniendo finalmente la transferencia buscada.
Figura 4: Transformación de los coeficientes del filtro analógico a digital. La Transformación Invariante al Impulso, como se dijo anteriormente, presenta una
característica lineal
c
NΩ
1
( )( )( )
Kk
kk
s zH s ks p=
−=−∏ 1
1
( )
Nk
kkM
kk
k
b sH s
a s
=
=
=∑
∑
Frecuencia de Corte Transferencia Forma Transferencia Forma y Orden estimado Ceros-Polos-Ganancia de Coeficientes
1
1
( )
Nk
kkM
kk
k
b sH s
a s
=
=
=∑
∑ 1( )
( )
Kk
kk
AH s ks p=
=−∑ −
=
=−∑ 1
1( )
1 )
Km kpkTm
k
T AH z ke z
Transferencia forma de Coeficientes Transferencia Fracciones Parciales Transferencia Fracciones Parciales (Filtro Analógico) (Filtro Analógico) (Filtro Digital)

107
ω ωΩ ↔ = Ω Ω ↔ = ΩTII TII
p p p m s s s mT T Por eso, se mantiene la forma de la respuesta espectral en la transformación que se
hace término a término, expandiendo la transferencia del sistema continuo en fracciones parciales
−= =
= ↔ =− −∑ ∑ 1
1 1( ) ( )
1 m
K KTIIk kpkT
kk k
A AH s H zs p e z
Figura 5: Respuesta espectral original del filtro analógico, Transformación Invariante al Impulso y respuesta transformada correspondiente al filtro digital. La gráfica de la respuesta espectral original está
rotada y reflejada a fin de mostrar la correspondencia punto a punto entre H(s) y H[z] con la relación dada por la transformación.
La Transformación Bilineal, no tiene una relación lineal en la escala de frecuencias
ω ω⎛ ⎞ ⎛ ⎞Ω ↔ = Ω Ω ↔ = Ω⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
2 22 2
TBTB m mp p p s s s
T Tarctg arctg
Una vez obtenida la transferencia del sistema continuo, se realiza el cambio de variable
para obtener la del sistema discreto
( )⎛ ⎞+⎜ ⎟
↔ = ⎜ ⎟⎜ ⎟−⎜ ⎟⎝ ⎠
12( )
12
mTB
m
T sH s H z H T s
Figura 6: Respuesta espectral original, Transformación Bilineal y respuesta transformada.

108
Ayuda para ejercicios de simulación buttord
Estima el orden y la frecuencia de corte de un filtro de Butterworth
Sintaxis [N,Wc] = buttord(vp,vs,rp,rs,’s’) vp, vs: vectores de pulsaciones digitales de corte de banda pasante y suprimida, en ω/π con límites vc=0 ⇔ ω=0 y vc=1 ⇔ ω=π rp, rs: rizado en banda pasante y suprimida ‘s’: indica vp y vs especificadas en rad/s
Ejemplo vp=40/500; vs=150/500; [N,Wc]=buttord(vp,vs,3,60) [b,a]=butter(N,Wc) freqz(b,a,512,1000)
Algoritmo
22
10
21
2 2
210 2
1 1log
1 1
12log 1
cs
Np
N
δ
δ
δ
⎛ ⎞⎛ ⎞−⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟
⎜ ⎟⎛ ⎞−⎜ ⎟⎜ ⎟ Ω⎝ ⎠⎝ ⎠= Ω =⎛ ⎞Ω ⎛ ⎞⎜ ⎟ −⎜ ⎟Ω⎝ ⎠ ⎝ ⎠
ellipord
Estima el orden y la frecuencia de corte de un filtro de Cauer (elíptico)
Sintaxis [N,Wc] = ellipord(Wp,Ws,rp,rs,’s’) vp, vs: vectores de pulsaciones digitales de corte de banda pasante y suprimida, en ω/π con límites vc=0 ⇔ ω=0 y vc=1 ⇔ ω=π rp, rs: rizado en banda pasante y suprimida ‘s’: indica vp y vs especificadas en rad/s
Ejemplo
vp=[50 250]/500;vs=[60 240]/500; [N,Wc]=ellipord(vp,vs,3,60) [b,a]=ellip(N,3,40,Wc,'stop') freqz(b,a,512,1000)
Algoritmo
( )2 22
22
2 22
22
1 1
1
11
s
p
s
p
N
δ εδ
δ εδ
⎛ ⎞− +Ω⎛ ⎞ ⎜ ⎟ℑ ℑ⎜ ⎟ ⎜ ⎟Ω −⎝ ⎠ ⎜ ⎟⎝ ⎠=
⎛ ⎞ ⎛ ⎞Ω⎛ ⎞⎜ ⎟ℑ − ℑ⎜ ⎟⎜ ⎟⎜ ⎟Ω⎝ ⎠ −⎝ ⎠⎝ ⎠
cheb1ord
Estima el orden y la frecuencia de corte de un filtro de Chebyshev Tipo I
Sintaxis [N,Wc] = cheb1ord(Wp,Ws,rp,rs,’s’) vp, vs: vectores de pulsaciones digitales de corte de banda pasante y suprimida, en ω/π con límites vc=0 ⇔ ω=0 y vc=1 ⇔ ω=π rp, rs: rizado en banda pasante y suprimida ‘s’: indica vp y vs especificadas en rad/s
Ejemplo
vp=100/500;vs=50/500; [N,Wc]=cheb1ord(vp,vs,25,100) [b,a]=cheby1(N,3,Wc,'high') freqz(b,a,512,1000)
Algoritmo 1
22
1
1cosh
cosh
( ) ' 3 1
s
p
c
N
H j dB sii
εδ
ε
−
−
Ω=Ω
⎛ ⎞⎜ ⎟⎝ ⎠≅
Ω⎛ ⎞⎜ ⎟Ω⎝ ⎠
Ω = − =
cheb2ord
Estima el orden y la frecuencia de corte de un filtro de Chebyshev Tipo II
Sintaxis [N,Wc] = cheb2ord(Wp,Ws,rp,rs,’s’) vp, vs: vectores de pulsaciones digitales de corte de banda pasante y suprimida, en ω/π con límites vc=0 ⇔ ω=0 y vc=1 ⇔ ω=π rp, rs: rizado en banda pasante y suprimida ‘s’: indica vp y vs especificadas en rad/s
Ejemplo
vs=[50 210]/500;vp=[60 200]/500; [N,Wc]=cheb2ord(vp,vs,10,40) [b,a]=cheby2(N,150,Wc) freqz(b,a,512,1000)
Algoritmo 1
22
1
1cosh
cosh
( ) ' 3 1
s
p
c
N
H j dB sii
εδ
ε
−
−
Ω=Ω
⎛ ⎞⎜ ⎟⎝ ⎠≅
Ω⎛ ⎞⎜ ⎟Ω⎝ ⎠
Ω = − =

109
buttap, ellipap
Calcula los coeficientes del prototipo analógico pasa-bajos de Butterworth y Cauer (elíptico)
Sintaxis [z,p,k] = buttap(N) z,p,k: ceros, polos y ganancia de transferencia de filtro N: orden del filtro Algoritmo
[ ] [ ] [ ]
[ ]
1
1
22
;
1;2;...; 1
N
k
kjn
k p k z k
p k e k N
ππ
−
=
+
⎧ ⎫= ℜ − =⎨ ⎬⎩ ⎭
= = −
∏
Sintaxis [z,p,k] = ellipap(N,rp,rs)
z,p,k: ceros, polos y ganancia de transferencia de filtro N: orden del filtro rp, rs: rizado en banda pasante y suprimida
cheb1ap, cheb2ap, besselap
Calcula los coeficientes del prototipo analógico pasa-bajos de Chebyshev y Bessel
Sintaxis [z,p,k] = cheb1ap(N,rp) z,p,k: ceros, polos y ganancia de transferencia de filtro N: orden del filtro rp: rizado en banda pasante
Sintaxis [z,p,k] = besselap(N) z,p,k: ceros, polos y ganancia de transferencia de filtro N: orden del filtro
Sintaxis [z,p,k] = cheb2ap(N,rs) z,p,k: ceros, polos y ganancia de transferencia de filtro N: orden del filtro rs: rizado en banda suprimida
lp2lp, lp2hp
Cambio de la frecuencia de un prototipo pasabajos a la banda pasante deseada
Sintaxis [blp,alp] = lp2lp(b,a,Wc) b,a: coeficientes del prototipo pasa-bajos blp,alp: coeficientes del filtro pasa-bajos Wc: frecuencia de corte Algoritmo
'C
ss =Ω
Sintaxis [bhp,ahp] = lp2hp(b,a,Wc) b,a: coeficientes del prototipo pasa-bajos bhp,ahp: coeficientes del filtro pasa-altos Wc: frecuencia de corte Algoritmo
'Cs
sΩ=
lp2bp, lp2bs
Cambio de la frecuencia de un prototipo pasabajos a la banda pasante deseada
Sintaxis [bbp,abp] = lp2bp(b,a,Wo,BW) b,a: coeficientes del prototipo pasa-bajos bbp,abp: coeficientes del filtro pasa-banda Wo: frecuencia central BW: ancho de banda Algoritmo
( )0
20
0
' 1'
'
U L U LBW
Q s ss Q ss BW
Ω = Ω Ω = Ω − Ω
+ Ω= = =Ω
Sintaxis [bbp,abp] = lp2bs(b,a,Wo,BW) b,a: coeficientes del prototipo pasa-bajos bbs,abs: coeficientes del filtro rechaza-banda Wo: frecuencia central BW: ancho de banda Algoritmo
( )
0
0
2 0
' '' 1
U L U LBWs ss Q s
BWQ s
Ω = Ω Ω = Ω − ΩΩ= = =
Ω+

110
impinvar
Transformación invariante al impulso para la conversión de filtros analógicos en digitales
Sintaxis [bd,ad] = impinvar(ba,aa,Fm,tol) ba, aa, bd, ad: coeficientes de las transferencias del filtro analógico y del digital Fm: frecuencia de muestreo (por defecto 1) tol: tolerancia (por defecto 0.1%) Ejemplo [ba,aa]=butter(6,200); [bd,ad]=impinvar(ba,aa,1000);
Algoritmo
( ) ( )1
1k
m
TIIk kp
kk kF
m
A AH z H sFm s p
e
Fω
= ↔ =−
−Ω=
∑ ∑
bilinear
Transformación bilineal para la conversión de filtros analógicos en digitales
Sintaxis [zd,pd,kd] = bilinear(za,pa,ka,Fm,Fp) [bd,ad] = bilinear(ba,aa,Fm,Fp) za, pa, ka, zd, pd, kd: ceros, polos y ganancia de las transferencias del filtro analógico y del digital ba, aa, bd, ad: coeficientes de las transferencias del filtro analógico y del digital Fm: frecuencia de muestreo (por defecto 1)
Ejemplo [za,pa,ka]= cauer(6,200,1.7,40); [zd,pd,kd]=bilinear(za,pa,ka,1000); Algoritmo
( ) ( ) 121
2argtan2m
zs F mzH z H s
Fω−=
+
Ω⎛ ⎞= = ⎜ ⎟⎝ ⎠
( ) ( ) 2 11tan
tan2argtan
2p
p
m
p
mF zs pF zF
FFH z H s
Fπ
π
πω
π−=⎛ ⎞ +⎜ ⎟⎝ ⎠
⎛ ⎞⎛ ⎞Ω⎜ ⎟⎜ ⎟⎝ ⎠⎜ ⎟= =
⎜ ⎟⎜ ⎟⎝ ⎠