FLOTADOR DE CALADO AUTOREGULABLE/CONSTANTE: Estructura
58
FLOTADOR DE CALADO AUTOREGULABLE/CONSTANTE: Estructura Alejandro Macan´as Vidal 24 de julio de 2013 1
Transcript of FLOTADOR DE CALADO AUTOREGULABLE/CONSTANTE: Estructura

FLOTADOR DE CALADOAUTOREGULABLE/CONSTANTE:
Estructura
Alejandro Macanas Vidal
24 de julio de 2013
1

Indice
1. Preambulo 4
2. Introduccion 5
3. Objetivo 6
4. Modelos desechados 74.1. El cubo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
4.1.1. Calculos de estabilidad . . . . . . . . . . . . . . . . . . 74.2. Cilindro recto . . . . . . . . . . . . . . . . . . . . . . . . . . . 114.3. Modelos horizontales . . . . . . . . . . . . . . . . . . . . . . . 124.4. Tricilindro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
4.4.1. Descripcion y Geometrıa del Tricilindro . . . . . . . . . 214.4.2. Estabilidad del Tricilindro . . . . . . . . . . . . . . . . 21
5. GEOMETRIA Y DESCRIPCIONFLOTADOR-QUAD DE ESCORA YCALADO AUTOREGULABLES 275.1. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 275.2. Estructural . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
5.2.1. Cilindros . . . . . . . . . . . . . . . . . . . . . . . . . . 295.2.2. Plancha . . . . . . . . . . . . . . . . . . . . . . . . . . 31
6. FUNCIONAMIENTO DEL FLOTADOR-QUAD DE ESCO-RA AUTOREGULABLE-CONSTANTE 376.1. Resumen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 376.2. Pre-Programacion . . . . . . . . . . . . . . . . . . . . . . . . . 386.3. Programacion . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
7. Electricidad y electronica 447.1. Bombas hidraulicas . . . . . . . . . . . . . . . . . . . . . . . . 447.2. Caja de electronica . . . . . . . . . . . . . . . . . . . . . . . . 47
8. Cables, tubos, accesorios y otros 52
2

9. Futuras Aplicaciones/Mejoras 559.1. Docencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559.2. Mesa para piscina . . . . . . . . . . . . . . . . . . . . . . . . . 559.3. Plataformas petrolıferas . . . . . . . . . . . . . . . . . . . . . 559.4. Wi-Fi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 559.5. Telecontrol . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 569.6. Autonomıa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
10.Bibliografıa y software utilizado 5710.1. Libros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5710.2. Artıculos y Proyectos . . . . . . . . . . . . . . . . . . . . . . . 5710.3. Webs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5710.4. Software . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
3

1. Preambulo
El siguiente proyecto final de carrera, es una de las dos partes que com-ponen en conjunto el verdadero objetivo del mismo: El diseno y la creacionde una plataforma flotante capaz de adrizarse automaticamente y recuperarsu calado inicial cuando colocamos un peso sobre ella, o cuando realizamosuna perturbacion cualquiera a su escora.
En esta parte, se ha desarrollado un artefacto flotante sencillo, teniendoen cuenta las necesidades y requerimientos que la parte electronica exige.La segunda parte, la ya citada parte electronica, sera presentada por JulianBermudez Ortega.
La division del proyecto en dos partes se ha debido a motivos ajenos anuestra voluntad, y no representa con exactitud el proceso de creacion delmismo, ya que ambos hemos participado en las dos partes.
4

2. Introduccion
En Diciembre de 1947, en los laboratorios Bell, John Bardeen, WalterHouser Brattain y William Bradford Shockley investigaron y desarrollaronel efecto transistor, lo que anos mas tarde les valdrıa para ganar el premioNobel.
El transistor es sin duda, uno de los inventos mas importantes del sigloXX. Sin el transistor, la era de las telecomunicaciones en la que vivimos,serıa totalmente imposible. Ordenadores, telefonos moviles, radios, calcula-doras, televisiones, memorias de almacenamiento masivo, equipos de musicatodos ellos tienen un denominador comun, y no es otro que la necesidad detransistores para su funcionamiento y existencia.
Nuestro proyecto trata de aunar electronica y arquitectura naval en suforma mas primitiva, campos entre los que hay una gran distancia tempo-ral, pero que gracias a la naturaleza adaptativa de la electronica, tienen uncamino comun de desarrollo. Esta fusion la realizaremos mediante softwareabierto y hardware modificable.
5

3. Objetivo
El objetivo de este proyecto de fin de carrera es el calculo, construccion yprogramacion de una plataforma flotante que sea capaz de regular su caladoy/o escora cuando se le aplican fuerzas externas en forma de pesos anadidos.
Para ello, la plataforma cuenta con un medidor diferencial de presionpor el que sabremos con exactitud el calado del artefacto flotante, y un ace-lerometro que nos provee lecturas del angulo de escora.
Al colocar un peso sobre nuestra plataforma, el calado aumenta, esto espercibido por el sensor, que envıa una senal de apertura y expulsion a lasbombas, que achican el agua contenida en los tanques de lastre, de modo queal tener menos desplazamiento, el calado queda equilibrado. Del mismo mo-do, las repetidas lecturas del acelerometro permiten volver a la situacion deadrizado, accionando las bombas correspondientes para equilibrar las masas.
Todo el proceso esta controlado por una plataforma controladora ArduinoTM.
En las sucesivas paginas se detallara el proceso creativo y constructivo dela plataforma fısica, es decir su ESTRUCTURA Y MONTAJE
6

4. Modelos desechados
A continuacion, se exponen algunos de los modelos que fueron barajadosa la hora de elegir la geometrıa y forma propia del artefacto flotante. Elnivel de detalle en la descripcion del modelo depende de cuanto tiempo fueconsiderado como una opcion real. Es necesario aclarar, que en un principionuestro proyecto no pretendıa adrizar el artefacto flotante, sino devolverlo asu lınea de flotacion inicial.
4.1. El cubo
El primer modelo considerado fue un cubo de 28x28x28cm que cuentacon sus aristas inferiores redondeadas con un radio de 2cm. Este modelo seencuentra fabricado con resina plastica transparente, y ya estaba disponibleen el taller antes del inicio de este proyecto. Su masa es de 10,140 kilogramos,repartida entre el propio material de construccion y dos pesas desplazablesen los sentidos transversal y vertical del artefacto.
Figura 1: Cubo desechado
4.1.1. Calculos de estabilidad
Las operaciones que aparecen a continuacion, son tan solo un primeracercamiento a los calculos de estabilidad del cubo, ya que muchas de las
7

variables que tenıan importancia no eran conocidas todavıa en esta fase delproyecto. Los datos correspondientes a la bomba de achique y llenado sonaproximados, pues todavıa no contabamos con un modelo en concreto. Setrata pues, de una de las iteraciones.
Para el calculo de su estabilidad comenzamos considerando que las pesasestan desplazadas de modo que la altura inicial del centro de gravedad delconjunto, se encuentra a 14 centımetros de altura respecto al plano base.
KGi = 14cm
El volumen total del cubo de aristas redondeadas fue obtenido sumer-giendo el mismo en un tanque de agua, y midiendo el aumento de la alturadel lıquido.
V = 0, 21751m3
El area del cuerpo prismatico del cubo fue calculada considerando lamisma como un cuadrado, calculo por otra parte exacto debido a que enefecto, se trata de un cuadrado al tener solo redondeado el pantoque.
A = 0, 0784m2
Para el valor de la masa, usamos el peso disponible en el taller, y comohemos dicho anteriormente
M = 10, 210kg
Los pesos ajenos al propio cubo quedan resumidos en los variables delastre, y en el peso de la bomba:
Kgibomba = 5cm
mbomba = 985g
Una vez conseguidos todos estos valores, estuvimos en disposicion de rea-lizar el calculo de estabilidad del cubo flotante. Se realizo en dos etapas:
8

Que flote
La premisa numero uno era que el peso del conjunto debıa ser igual alempuje producido por el sistema lıquido donde lo sumergimos.
Peso = Empuje
El peso se consigue de manera sencilla multiplicando la masa total por laaceleracion gravitatoria
Peso = masa ∗ gravedad = 11, 195 ∗ 9, 81 = 109, 823N
Al ser el empuje igual al volumen desplazado de lıquido, multiplicadopor su densidad, aproximando el volumen al de un cubo podemos obtener elcalado del mismo en situacion de lastre cero. Considerando que la densidadde nuestro agua es 1000 gramos/litro
E = V ∗ ρ ∗ g = A ∗ T ∗ ρ ∗ g = 0, 0784 ∗ T ∗ 1000 ∗ 9, 81 = P = 109, 823N
Donde T es el calado y es la magnitud que queremos despejar
T = 0, 1403m
Que flote adrizado
La premisa basica es que la altura metacentrica tiene que ser igual osuperior a cero, para ello usamos la siguiente expresion hidrostatica:
GM = KB +BM −KG
Donde KB es la altura del centro de carena, BM la distancia entre elcentro de carena y el metacentro y KG la altura del centro de gravedadrespecto al plano base.
En el calculo de los distintos terminos se hicieron las siguientes conside-raciones:
9

Para el KB o altura del centro de carena, consideramos que el artefactoes un cubo, y por tanto el volumen debajo de la lınea de flotacion o volumende carena, es un ortoedro, cuyo centro de carena estara a la mitad del calado.
KB =T
2= 0, 07015m
El BM como es habitual, lo calculamos con la siguiente expresion:
BM =It ∗ ρ
∆
Donde It es el momento de inercia transversal, rho es la densidad delfluido, y Delta el desplazamiento.
Para el KG simplemente debemos considerar las alturas de los centrosde gravedad propios de cada accesorio multiplicadas por sus masas, y dividirentre la masa total
∑i=1
Kgi ∗mi
Mt
Todo esto en conjunto nos llevo a la conclusion de que hidrostaticamenteel modelo era valido (realmente contabamos con ello ya que era un modelocon el que se habıa trabajado anteriormente). Su capacidad total era acepta-ble. Fue descartado por las dificultades intrınsecas de montar la plataformaarduino sobre un modelo de reducidas dimensiones, ası como por el deseo dehacer un proyecto visualmente mas atractivo.
10

4.2. Cilindro recto
Se trataba de un cilindro que debıa flotar en vertical.
Figura 2: Cilindro desechado
Las medidas pretendidas altura = 45cm y Diametro = 25cm fueron elprimer problema, ya que tuvimos muchas dificultades a la hora de encontrartubos de pvc prefabricados de ese diametro. La posibilidad de realizarlo porencargo fue desestimada debido al incremento de precio en una parte en laque preferimos abaratar costes.
Pero la razon definitiva por la que no fue utilizado fue la imposibilidadde trabajar con escora, ya que al tener una sola cavidad, no se podrıa jugarcon los brazos adrizantes.
Sin embargo, el cilindro fue muy util en el desarrollo de nuestro modelofinal.
11

4.3. Modelos horizontales
Los modelos horizontales fueron una serie de modelos con la caracterısticaen comun de contar con sus flotadores colocados en horizontal.
Figura 3: Seccion transversal de un Modelo Horizontal
Pese a tener una gran estabilidad y tener la capacidad de sostener pesosaproximadamente iguales a los modelos verticales, contaban con tres grandesproblemas por los que fueron descartados:
- Su escaso calado permitıa menores escoras que los modelos verticales,ya que superado cierto angulo, la parte superior de la plataforma, quedarıainundada.
- Las superficies libres crecen considerablemente, con la consiguiente dis-minucion en la altura metacentrica y por tanto en la estabilidad. La solucionde separar el interior de los flotadores en longitudes menores, es hidrostatica-mente viable y correcta, pero dificulta mucho su construccion y la instalacionde la bomba de achique en el interior del flotador.
- La mayorıa de los flotadores disponibles carecen de cuerpo prismaticosi estan puestos en horizontal. Esto provoca que haya valores para los queciertos pesos en determinadas situaciones de lastre, produzcan escoras apenasperceptibles.
Para reflejar este ultimo punto, se realizo un pequeno ejemplo de demos-tracion:
12

Ejemplo de Modelo Horizontal
Calcularemos el peso que hay que colocar por metro en un modelo hori-zontal de flotadores prismaticos de base de triangulo isosceles. Buscamos lamasa a colocar para conseguir una escora de seis grados con un calado inicialde 2 decımetros. Las medidas se encuentran en decımetros.
Figura 4: Seccion transversal de un Modelo Horizontal
Para que el artefacto flotante permanezca estable con una escora de seisgrados, necesitamos que el par escorante y el par adrizante tengan el mismovalor:
Pe(6) = Pa(6)
∆ = γ ∗ ∇
Donde delta es el desplazamiento, gamma la densidad del fluido y nablaes el volumen de carena.
Para calcular el volumen de carena, basta con tener en cuenta que sondos prismas triangulares:
13

∇ = 2(1
2∗ Areabase ∗ alturaprisma)∇ = 2(
2T 2
2∗ 10) = 80dm3
Al considerar que el fluido de trabajo es agua dulce, su densidad es 1, portanto el volumen de carena coincide con el desplazamiento:
∆ = ∇ = 80kg
Para el par adrizante nos valemos de la siguiente expresion:
Pa = ∆ ∗GZ = ∆ ∗GMsen6
Para calcular el valor de la altura metacentrica:
GM = KB +BM −KG
El valor de KB corresponde al de 2/3 de la altura del triangulo, ya queel centro de gravedad del mismo se encuentra a 1/3 desde la base.
KB =2
3∗ T =
4
3dm
El calculo del BM requiere conocer el valor del momento de inercia de lasuperficie de flotacion.
14

Figura 5: Superficie de flotacion
BM =It
∇
Para el momento de inercia transversal necesitamos usar el teorema deSteiner, ya que aunque conocemos la inercia de un rectangulo respecto al ejeque pasa por su centro de gravedad, hay que calcular la inercia del rectangulodesplazado una distancia d respecto al eje deseado.
It = 2(1
12(2T )3∗L+(L∗2T )∗d2 = 2(
1
12(2∗2)3∗10+(10∗2∗2)∗42 = 386, 6dm4
BM =It
∇=
386, 6
80= 4, 12dm
15

Por ultimo, y una vez mas, es imposible calcular el KG con exactitud aestas alturas de diseno, por lo tomamos un valor aproximado de 3,5 dm.
Despues de esto estamos en condiciones de calcular un valor aproximadode la altura metacentrica del artefacto de flotadores horizontales.
GM = KB +BM −KG = 0, 76dm
Y estos valores nos arrojan un par adrizante ( y por tanto escorante, yaque la premisa que hemos tomado es que el par adrizante y escorante debenser iguales ) de valor igual a:
Pa = ∆ ∗GM ∗ sen(6) = 6,21kg ∗ dm
Conseguir seis grados colocando un peso cercano a los seis kilos(recordemosque este valor es aproximado debido a la fase de proyecto en la que nos en-contrabamos), estaba lejos de lo pretendido en el proyecto.
16

4.4. Tricilindro
Tricilindro es el nombre con el que nos referimos a uno de los modelosque tuvimos en mayor consideracion. Las medidas aparecen en mm.
Figura 6: Plano superior: Tricilindro
La altura prevista para las patas fue de 500 mm.
17

Figura 7: Vista 3D Tricilindro
18

Figura 8: Vista 3D Alambrica Tricilindro
19

Figura 9: Vista 3D Rayos X Tricilindro
20

4.4.1. Descripcion y Geometrıa del Tricilindro
Este modelo no llego a ser fabricado, pero durante el proceso de eleccion degeometrıa fue necesario realizar algunos calculos aproximados para estimarsu estabilidad. Para ello fue necesario tomar unos valores aproximados de lospesos.
El tricilindro esta compuesto por tres cilindros que hacen las veces deflotador, y que soportan encima de ellos una plancha triangular equilatera,por lo que cada esquina forma un angulo de 60 grados.
La plancha de metacrilato tiene un grosor de unos 4-6mm.
Masas:
- de cada cilindro: 800 gramos.
- de cada bomba: 600 gramos.
- de la plancha de metacrilato: 2200 gramos.
- de la caja de electronica: 1100 gramos.
- otros(cables etc): 750 gramos.
Masa total = 8.25 + Peso lastre kgs
4.4.2. Estabilidad del Tricilindro
Como es habitual, tenemos dos objetivos:
- Que flote.
- Que flote adrizado.
21

Que flote
El fluido sera obviamente agua. Partimos de P=E
E = γ∇
∇ = 4Π ∗R2 ∗ T
Suponiendo un calado de T = 0’35 m
∇ = 4Π ∗R2 ∗ T = 4Π ∗ 0′052 ∗ 0′35 = 0′0113m3
E = γ∇ = 1 ∗ 0′0113 = 0′0113ton = 11′3Kg
Masadelastre = Empuje−Masatotal(sinlastre) = 11′3− 8′25 = 3′05Kg
Este es el lastre que hay que colocar en los flotadores cilındricos paraconseguir un calado inicial de 0’35 metros. Al ser tres flotadores, vemos queaproximadamente debe ser un litro de agua lo que debemos introducir ini-cialmente.
Este proceso de llenado se realiza de manera automatica por las bombas,y el programa permite distintas posiciones iniciales en cuanto a calado, va-riando precisamente la cantidad de lastre introducida por las bombas en loscilindros estancos.
22

Que flote adrizado
Considerando obviamente adrizado la posicion en la que los cilindros seencuentran en vertical y perpendiculares a la superficie de flotacion.
Una vez mas recurrimos a:
GM = KB +BM −KG
KB = T/2 =0,35
2= 0,175m
BM =It
∇
Llegados a este punto, se hace necesario tener en cuenta que no hay unadireccion transversal como tal. En los anteriores modelos, solo se tuvo encuenta la estabilidad transversal debido o a que eran simetricos, o una de lasdirecciones representaba claramente menor estabilidad.
La manera utilizada para estimar cual es el eje de giro que debemosconsiderar, fue calcular distintas inercias para la geometrıa del tricilindro.
Consideramos una direccion horizontal o X, y otra vertical o Y.
Consideremos el centro de gravedad en Y, al ser simetrico, se encuentraen el centro de la superficie del triangulo imaginario formado por los cırculos.
23

Figura 10: Superficies de flotacion y eje Y
Partimos de la ventaja de que uno de los cırculos hace coincidir su centrocon el eje Y, por tanto, aplicando el teorema de Steiner y teniendo en cuentaque la inercia propia del cırculo corresponde a:
Ic =1
4Π ∗R4 =
1
4Π ∗ 0,054 = 4,9x10−6m4
Calculamos tambien el area del cırculo:
Ac = Π ∗R2 = 7,85x10−3m2
24

Toda esta informacion en conjunto nos arroja:
Iy = Ic+2(Ic+Ac∗x2) = 4,9x10−6+2(4,9x10−6+7,85x10−3∗0,22) = 6,427x10−4m4
A continuacion realizamos el mismo proceso pero en el eje X, en este casoel centro de gravedad, por estar las superficies formando un triangulo, seencuentra a 2/3 de lo que podrıa considerarse como altura.
Figura 11: Superficies de flotacion y eje X
Ix = Ic + Ac ∗ x21 + 2(Ic + Ac ∗ x22) =
= 4,9x10−6+7,85x10−3∗0,11652+2(4,9x10−6+7,85x10−3∗0,23212) = 8,56x10−4m4
Por ultimo calculamos el volumen de carena correspondiente a ese calado:
∇ = 3Ac ∗ T = 3 ∗ 7,85x10−3 ∗ 035 = 2,171x10−3
25

Y con esto estamos en disposicion de calcular los BM
BMx =Ix∇
=8,56x10−4
2,171x10−3= 0,394m
BMy =Iy∇
=6,427x10−4
2,171x10−3= 0,296m
.
Para el calculo del KG, nos valemos de los valores de masa que hemosdescrito unos parrafos mas arriba, e indicamos el valor de sus Kg individuales:
- Cada cilindro: 800 gramos. Kg = 0.25 m
- Cada bomba: 600 gramos. Kg = 0.05 m
- La plancha de metacrilato: 2200 gramos. Kg = 0.51 m
- La caja de electronica: 1100 gramos. Kg = 0.56 m
- otros(cables etc): 750 gramos. Kg = 0.45
∑i=1
Kgi ∗mi
Mt= 0,31m
Regresando una vez mas a la tan popular ecuacion para el calculo delGM:
GMx = KB +BM −KG = 0,259m > 0
GMy = KB +BM −KG = 0,161m > 0
La conclusion de todos estos calculos es que el tricilindro es estable y portanto viable.
Tambien se ve que las fuerzas ejercidas de modo que hagan girar el trici-lindro sobre su eje Y, tendran mayor efecto que las que lo hagan girar sobresu eje X.
26

5. GEOMETRIA Y DESCRIPCION
FLOTADOR-QUAD DE ESCORA Y
CALADO AUTOREGULABLES
5.1. Resumen
La plataforma flotante consta principalmente de dos partes: Por un ladola parte estructural, y por otro, la parte electronica y electrica. A su vez,estructuralmente queda dividida en otras dos partes, cilindros y la plancha.Por ultimo, la parte electronica cuenta con la caja de electronica y las bombas.
Altura total: 72 cm
Superficie maxima: 70x70cm
Peso total:
Altura de los cilindros: 50 cm.
Diametro de los cilindros: 11cm.
Grosor de la plancha: 1.5mm.
Figura 12: Quad-flotador
27

Figura 13: Modelo visto desde abajo
5.2. Estructural
Como ya hemos comentado, consta de dos grandes partes:
-Cilindros.
-Plancha.
28

5.2.1. Cilindros
Las patas de nuestro artefacto flotante son cuatro cilindros estancos colo-cados en vertical, cada uno en la esquina de un cuadrado imaginario. Constande una tapa con rosca. La tapa con rosca se encuentra atornillada a la plata-forma, de modo que las patas pueden ser retiradas o colocadas con relativafacilidad.
Figura 14: Flotador-Cilindro de PVC
Estan fabricados en PVC, ya que es un material relativamente baratoy ligero, con el que resulta sencillo producir geometrıas estructuralmente
29

resistentes y estancas, y que ademas cuenta con el plus de ser muy accesible,ya que se encuentra en cualquier ferreterıa.
El PVC ademas no tiene problemas de electrolisis ni de corrosion, y subajo coeficiente de rozamiento coopera para que no se produzcan sedimenta-ciones en el interior de los mismos, aunque esto no es un dato determinanteya que se trata de un problema a largo plazo.
Sin embargo, fue necesario el uso de silicona en varias de las juntas paraevitar la entrada de agua a los cilindros.
El uso de pintura blanca sobre los mismos se debe unicamente a cuestionesesteticas.
En la parte superior de cada uno de los cilindros, tenemos dos pequenosorificios por los que rellenar o achicar el agua.
Figura 15: Vista interior del cilindro montado
30

5.2.2. Plancha
En primer lugar adquirimos una plancha de polimetilmetacrilato de 6 mmde grosor y 2,850 kilogramos de peso. El metacrilato tiene mayor resistenciaa la intemperie que el poliestireno o el policarbonato, lo que nos parecio ex-trapolable a nuestra plancha. Otro factor relevante fue que su densidad esmenor que la del policarbonato, por lo que es mas ligero. Es necesario remar-car que la plancha es la parte superior del artefacto en conjunto, y por tantoel aumento de peso aumenta la altura del centro de gravedad, perjudicandoa la estabilidad.
La ventaja del metacrilato frente a fabricar una plancha de metal esesencialmente la transparencia del plastico, de manera que todo el procesode vaciado y llenado de los cilindros para adrizar la plataforma y volver alcalado inicial, podrıa verse desde arriba.
Sin embargo, al realizar las primeras pruebas tras atornillar los cilindrosa la plancha, encontramos dos problemas que nos obligaron a disenar unaplancha de aluminio:
- El metacrilato pandeo considerablemente y de manera elastica, por loque al anadir o quitar pesos el periodo de balance no solo era bastante pe-queno, sino que parecıa altamente inestable. Esto dificultaba mucho la amor-tiguacion de la perturbacion en escora y calado.
- Las roscas de los cilindros no desenroscaban bien, por lo que al mon-tar y desmontar la plataforma en varias ocasiones, aparecieron grietas en elmetacrilato por los esfuerzos sufridos, hasta que la plancha se rompio.
Por tanto, finalmente tuvimos que disenar una plancha fabricada en alu-minio.
La gran ventaja del aluminio frente al metacrilato es la posibilidad deincluir refuerzos de manera sencilla y efectiva. Se barajaron distintos disenos:
31

Figura 16: Planchas no elegidas 1 y 2 de 4
Los refuerzos utilizados son de 4x2cm y tienen el mismo espesor que elresto de la plancha
Figura 17: Planchas no elegidas 3 y 4 de 4
Estos cuatro disenos fueron descartados por diferentes motivos:
- Incapacidad de poner los cilindros en las esquinas (model.4).
32

- Dificultad en los cruces (m.2 y 4).
- Dudas de su efectividad (m.3).
- Simplemente, encontramos un diseno estructuralmente mas resistente(m.1).
Figura 18: Plancha definitiva
- La plancha elegida cuenta con las ventajas de tener las esquinas libres,por lo que hay hueco suficiente para los cilindros.
- Sus esquinas dobladas producen la rigidez que necesita.
- El gran hueco central se dejo pensando en la posibilidad de que surgierala necesidad de instalar algo debajo de la caja de electronica.
- En un primer vistazo las esquinas parecen endebles, pero hay que teneren cuenta que los cilindros hacen las veces de vigas, ya que el empuje seproducira sobretodo en ellos.
33

Figura 19: Detalle refuerzo
En esta imagen se muestra no solo la union de los refuerzos, sino tambienel sistema de remaches por el que esta unido a la plancha.
34

Figura 20: Detalle refuerzo real
Con todo esto, sacrificando la posibilidad de ver bajo la plancha, solu-cionamos los problemas de pandeo y rigidez, quedando finalizada la parteestructural del proyecto.
35

Figura 21: Plataforma Terminada
36

6. FUNCIONAMIENTO DEL FLOTADOR-
QUAD DE ESCORA AUTOREGULABLE-
CONSTANTE
6.1. Resumen
A la hora de afrontar la decision del modo en el que la plataforma debıarecuperar su calado y volver a la posicion de adrizado, tuvimos dos opciones:
A) Una programacion que se valiera de los sensores(de presion y ace-lerometro) para localizar cuanto peso y donde lo hemos colocado, y en basea esos datos de entrada calculara la cantidad exacta que hay que achicar oinsertar en cada uno de los cilindros para volver a la posicion deseada. UNASOLA LECTURA.
B) Lecturas repetidas tanto de acelerometro como del sensor de presion,de modo que la programacion influya en que bomba debera ponerse en mar-cha, pero no en la cantidad. MUCHAS LECTURAS.
Finalmente, decidimos que ambas serıan necesarias.
La primera nos sirvio para saber hasta que punto el flotador quad fun-cionarıa, que angulos se conseguirıan y con que pesos colocados donde.
La segunda es la que realmente hace funcionar la plataforma, sus repetidaslecturas provocan que la precision sea superior a los dos grados de escora ylos dos milımetros de calado. Con el primer sistema serıa poco preciso, yaque la construccion de la misma cuenta con desviaciones frente a la teorıa.Por citar algunos ejemplos: La plancha tiene sus refuerzos remachados sindemasiado criterio, por lo que su centro de gravedad es muy difıcil de calcularcon exactitud. Los cables producen ciertas tensiones en la plataforma que nofueron tenidas en cuenta. Ademas, para utilizar este sistema se requerirıancuatro diferenciales de presion, pues necesitarıamos una lectura del caladode cada cilindro para calcular el peso que hemos colocado.
37

6.2. Pre-Programacion
En esta subseccion se encuentra la programacion previa a la programacionque hace funcionar la plataforma. Dicho de otro modo, es la programacionque arroja los calculos de como se comportarıa la plataforma.
Se trabajo en Microsoft Excell. A continuacion un ejemplo de su funcio-namiento:
38

39

40

La primera tabla nos muestra los distintos parametros que influyen en elproceso de equilibrio de la plataforma quad. Los valores en granate son fijosdebido a la geometrıa del artefacto. Los valores amarillos son resultados depequenas operaciones como pueden ser areas o inercias. Los rojo claro, nosdan conclusiones respecto al peso que hemos colocado.
En la segunda tabla se realizan los calculos de estabilidad, obtencion delos valores de la altura metacentrica, centro de gravedad, centro de carena etc.Los valores azules son las lecturas que el acelerometro nos da(Recordemosque los valores de entrada seran las medidas de los diferenciales de presion ylos angulos del acelerometro, y que en base a ello calcularemos el peso quehemos colocado y donde se encuentra)
En la tercera tabla, los valores azules nos dan los calados de cada uno delos flotadores. Basandose en los calculos hidrostaticos realizados en la tabla2, obtenemos los valores verdes, es decir, la masa colocada, y su posicionrespecto al centro geometrico del cuadrado que es la plancha.
41

6.3. Programacion
Figura 22: Diagrama de Flujo
42

Figura 23: Diagrama de Flujo 2
43

7. Electricidad y electronica
7.1. Bombas hidraulicas
Se han requerido cinco bombas para el correcto funcionamiento de la pla-taforma autoadrizante. Cuatro de ellas son bombas de acuario sumergiblesque consiguen una altura de agua de 0,5 metros - factor por el cual fueronelegidas - y una capacidad de entre 150/300 Litros por hora segun la especifi-cacion del fabricante. Estan situadas en el fondo de cada uno de los cilindros,y realizan el papel de achique o vaciado de los mismos.
Figura 24: Bomba de achique
44

En la siguiente imagen se puede ver la relacion entre altura de carga ycapacidad de trasiego:
Figura 25: Especificaciones Bomba de Achique
No es difıcil imaginar que la velocidad de descarga sera moderada.
La quinta es una bomba de jardın, tambien sumergible y de una capa-cidad mucho mayor(1000 l/h segun el fabricante). Esto es necesario ya queunicamente ella participa en el llenado de los cilindros, y de otro modo, elproceso serıa demasiado lento.
45

Figura 26: Bomba de llenado
La bomba central no se encuentra digamos a bordo, si no que quedacolgada de la manga de llenado de los cilindros.
El motivo principal de este hecho, es que si la bomba esta en contactodirecto con la plataforma hace perder precision al acelerometro, ya que lasvibraciones debidas a su gran caudal, afectan al buen funcionamiento delmismo.
Por otra parte, elevar innecesariamente el centro de gravedad de la pla-taforma es contraproducente.
46

7.2. Caja de electronica
Figura 27: Caja de Electronica
ARDUINO
Es una plataforma de hardware libre, basada en una placa con un micro-controlador y un entorno de desarrollo, disenada para facilitar el uso de laelectronica en proyectos multidisciplinares.
Arduino puede tomar informacion del entorno a traves de sus pines deentrada de toda tipo de sensores y puede afectar aquello que le rodea contro-lando todo tipo de perifericos. El microcontrolador en la placa de Arduino seprograma mediante el lenguaje de programacion Arduino (basado en Wiring)y el entorno de desarrollo Arduino (basado en Processing)
En nuestro caso es especialmente util por la gran versatilidad que ofrece.
47

RELES
Grove-Relay es un modulo de interruptor-rele de apertura digital, quefunciona con voltajes relativamente bajos (5voltios) y otros mucho mayores(250 voltios si utilizamos una intensidad de 10 amperios).
Figura 28: Rele
Cuenta con un LED que se activa cuando se conecta, de modo que encada momento tenemos constancia de si esta en funcionamiento o no.
En nuestro caso, los reles seran los encargados de activar o desactivarlas bombas. Por otra parte, el encargado de controlar el rele sera Arduinomediante sus salidas digitales, que proporcionan el voltaje necesario paraaccionar el electroiman.
48

ACELEROMETRO
En primer lugar, utilizamos un acelerometro de escasa calidad y bajocoste que era digital. Pese a que era capaz de producir lecturas medianamentecorrectas, la reiteracion en el envıo del angulo provocaba un fallo al abrir laslibrerıas correspondientes.
Figura 29: Rele y acelerometro conectados a Arduino
Este problema probablemente derivaba de la escasa calidad del mismo oa una posible rotura de alguno de los pines, y se hacıa patente a la hora dereproducir las lecturas en un modelo virtual desarrollado con SolidWork yProccessing. En el, se veıa como la plataforma virtual parecıa tener ruıdo,pues vibraba.
Por estos motivos nos vimos obligados a recurrir a un acelerometro analogi-co cuyas lecturas fueran directas, y no procesadas digitalmente.
49

AMPLIFICADOR OPERACIONALES
Es un circuito electronico (normalmente se presenta como circuito inte-grado) que tiene dos entradas y una salida. La salida es la diferencia de lasdos entradas multiplicada por un factor G al que llamamos ganancia.
En nuestro caso hemos utilizado los INA126P.
Se alimenta con una pila de 9V y produce un voltaje de +5V o -5V demodo que obtenemos una tension simetrica.
La ganancia, segun el fabricante viene determinada por la siguiente ex-presion:
G = 5 +80kΩ
RG
BLUETOOTH
Grove-Serial WLS31746P es un modulo de conexion sin cables via blue-tooth que es facil de acoplar y utilizar, y es compatible con el Shield existentetambien de Grove. El puerto del modulo es 2.0+EDR(Enhanced Data Rate)y proporciona hasta 3mbps modulados a 2.4 GHz.
Cuenta con auto-conexion al ultimo dispositivo, siempre y cuando este seencuentre encendido. Esta caracterıstica es muy valorable dado el hecho deque el modulo bluetooth tan solo esta conectado con la plataforma, lo quenos ahorra tiempo y posibles contratiempos de desconexion.
En su conexion con arduino, segun las especificaciones del fabricante, lomas eficiente es un uso a 5 voltios transfiriendo a 2mbps y sensibilidad de-80 dbm.
50

SHIELD DE CONEXIONES
La plataforma consta de un Shield de conexiones SLD12148P, tambiendel fabricante Grove:
Figura 30: Shield de Conexiones
Figura 31: Esquema del Shield
51

8. Cables, tubos, accesorios y otros
En este apartado, comentaremos los diferentes cables, tubos y accesoriosque han sido utilizados para la construccion final del flotador-Quad.
En el proceso de llenado y achique de los flotadores cilindricos, se requiereel uso de tubos de plastico por los que circule el agua. Hemos utilizadomanga transparente sin especificaciones concretas.
Figura 32: Tubo de llenado y achique
Los tubos estan conectados a la toma de la bomba, y terminan en unoscodos instalados en los cilindros que dan direccion al agua achicada. Loscodos estan fijos mediante adhesivo plastico.
52

Figura 33: Detalle de uno de los codos
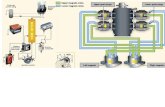
La bomba de llenado esta conectada a una goma de seccion ligeramentesuperior, y cuenta con un sistema de distribucion para llegar a los cuatrocilindros
Figura 34: Sistema de Distrubicion
53

Respecto a los cables. Las bombas pequenas venıan de fabrica con en-chufes normales. Los cambiamos y los unimos de modo que un solo enchufepermitiera su funcionamiento y el de toda la caja de electronica
Debemos tener en cuenta que la pila alimenta por separado al diferencialde presion.
La conexion al PC se ha llevado a cabo con un cable USB.
La caja de electronica ha sido adherida a la plataforma mediante el usode silicona en tubo.
54

9. Futuras Aplicaciones/Mejoras
En esta seccion se trataran tanto posibles usos de la plataforma, comomejoras que pueden ser implantadas en ella:
9.1. Docencia
El metodo manual de la plataforma-quad permite que pueda ser utilizadacon motivos educacionales, por ejemplo como practicas de Hidrostatica.
En ellas, podrıan calcularse de manera experimental distintos parametrosque intervienen en la estabilidad de un flotador, como por ejemplo la alturametacentrica.
9.2. Mesa para piscina
Nuestra plataforma al fin y al cabo es una mesa que si contase con laposibilidad de achicar y rellenar rapidamente serıa virtualmente involcable.
Por motivos industriales no parece cercano el desarrollo de este producto,ya que fabricar plataformas como la nuestra pero con mejores dispositivos yelectronica, elevarıa el precio de la misma a un nivel fuera de mercado.
No obstante, no nos parece una idea descabellada si en el proceso indus-trial se optimizasen suficiente los gastos.
9.3. Plataformas petrolıferas
Pese a no ser un campo que dominemos en gran medida, se intuye que esposible que tenga alguna aplicacion en las mismas.
9.4. Wi-Fi
La integracion de un modulo Wi-Fi en lugar del modulo Bluetooth per-mitirıa comunicaciones mas rapidas y a mayor distancia.
55

9.5. Telecontrol
En la actualidad, desde nuestros dispositivos moviles(tanto IOS como AN-DROID OS) podemos realizar las lecturas del acelerometro y del diferencialde presion, pero no enviar ordenes a la plataforma-quad.
La creacion de una interfaz comoda y practica para sistema operativoAndroid, Bada o IOS, junto con la instalacion de un receptor en el flotador,nos permitirıa que cuando la plataforma este en modo manual en vez deautomatico, podamos enviarle los valores de los parametros deseados, demodo que controlarıamos la plataforma desde nuestros dispositivos moviles.
9.6. Autonomıa
Aunque la plataforma-quad es autoadrizante, requiere de tomas de co-rriente, dado que no cuenta con ninguna baterıa ni fuente de energıa propia.
La instalacion de una baterıa permitirıa que la plataforma no solo tuviesela opcion automatica, si no que se convirtirıa en un flotador autonomo.
56

10. Bibliografıa y software utilizado
10.1. Libros
- Teorıa de las Estructuras - Timoshenko - 1965
- Teorıa del buque. Flotabilidad y estabilidad - Joan Olivella Puig - Edi-cions UPC 1994
- Mecanica de Fluidos General - Manuel M. Sanchez Nieto - UniversidadPolitecnica de Cartagena 2007
- Electronica - Hambley Allan R. - Thomson 2005
10.2. Artıculos y Proyectos
- Flotador de Calado Autoregulable/Constante: Electronica - Julian BermudezOrtega 2013
10.3. Webs
- http://www.Google.com.
- http://www.ing-integral.blogspot.com.es.
- http://www.instructables.com/id/Arduino-Projects.
- http://www.arduino.cc/
- http://www.playground.arduino.cc/interfacing/processing.
- http://www.dte.us.es
- http://www.lcardaba.com/articles/opamps.html
- http://www.processing.org/
- http://www.seeedstudio.com/wiki/Grove - Relay
- http://www.seeedstudio.com/wiki/Grove - Serial Bluetooth
- http://www.seeedstudio.com/wiki/images/2/25/Bluetooth Software Instruction.pdf
- http://www.ni.com/academic/why labview/esa/
- http://www.cadsoftusa.com/?language=en
- http://www.cursomicros.com/avr/bus-i2c/protocolo-bus-i2c.html
- http://wiki.processing.org/w/Cylinder
- http://es.wikipedia.org/wiki/Rel
- http://es.wikipedia.org/wiki/LabVIEW
- http://es.wikipedia.org/wiki/Processing
- http://es.wikipedia.org/wiki/EAGLE
57

10.4. Software
- Autocad.
- Rhinoceros.
- SolidWorks.
- Processing.
- Ansys.
- Excell.
- Latex.
- Worktex.
- TeXstudio.
- Texmaker.
- Bluetooth SPP.
- Eagle.
- Dropbox.
- Catch.
- Videopad.
- Camstudio.
58