GDL ROB
3
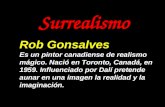
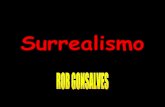
Configuración cilíndrica: Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad. El robot de configuración cilíndrica está diseñado para ejecutar los movimientos conocidos como interpolación lineal e interpolación por articulación. La interpolación por articulación se lleva a cabo por medio de la primera articulación, ya que ésta puede realizar un movimiento rotacional (ver movimiento A en el dibujo siguiente). Configuración polar: Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal. Este robot utiliza la interpolación por articulación para moverse en sus dos primeras articulaciones y la interpolación lineal para la extensión y retracción.
-
Upload
maldito-sudaca -
Category
Documents
-
view
215 -
download
1
description
ROB
Transcript of GDL ROB
Configuracin cilndrica:Puede realizar dos movimientos lineales y uno rotacional, o sea, que presenta tres grados de libertad. El robot de configuracin cilndrica est diseado para ejecutar los movimientos conocidos como interpolacin lineal e interpolacin por articulacin. La interpolacin por articulacin se lleva a cabo por medio de la primera articulacin, ya que sta puede realizar un movimiento rotacional (ver movimiento A en el dibujo siguiente).
Configuracin polar:Tiene varias articulaciones. Cada una de ellas puede realizar un movimiento distinto: rotacional, angular y lineal. Este robot utiliza la interpolacin por articulacin para moverse en sus dos primeras articulaciones y la interpolacin lineal para la extensin y retraccin.
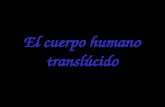
Configuracin angular (o de brazo articulado):Presenta una articulacin con movimiento rotacional y dos angulares.Aunque el brazo articulado puede realizar el movimiento llamado interpolacin lineal (para lo cual requiere mover simultneamente dos o tres de sus articulaciones), el movimiento natural es el de interpolacin por articulacin, tanto rotacional como angular. Se lo llama de brazo articulado por su similitud con el brazo humano (figura inferior).
Configuracin No clsica:
Adems de las cuatro configuraciones clsicas mencionadas, existen otras configuraciones llamadasno clsicas.El ejemplo ms comn de una configuracin no clsica lo representa elrobot tipo SCARA(foto), cuyas siglas significan:Selective apliance arm robot for asembly. Este brazo puede realizar movimiento horizontales de mayor alcance debido a sus dos articulaciones rotacionales. El robot de configuracin SCARA tambin puede hacer un movimiento lineal (mediante su tercer articulacin).Publicado porAriel Viscarraen14:00Etiquetas:grados de libertad,Tipos de configuraciones