Integracion_Estocastica

of 41
-
Upload
lucas-corrales -
Category
Documents
-
view
221 -
download
0
Transcript of Integracion_Estocastica
-
8/16/2019 Integracion_Estocastica
1/41
Integración Estocástica
M.I. Simoy, L. Corrales
Resumen
La idea del trabajo es resolver un modelo de Lotka-Volterra estocástico utilizando dos métodos
numéricos: el método de Euler-Maruyama y el método de Milstein.
En la sección 1 vamos a estudiar los métodos para un caso particular de una ecuación diferencial
estocástica en el que conocemos la solución analítica.
En la sección 2 vamos a estudiar los métodos para una ecuación diferencial estocástica matricial
en casos donde también conocemos la solución analítica.
En la sección 3 vamos a resolver el modelo de Lotka-Volterra determinístico y estocástico com-
parando los resultados.
Índice
1. Solución de una ecuación diferencial estocástica 11.1. Euler-Maruyana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21.2. Milstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.3. Comparación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2. Solución de una ecuación diferencial matricial estocástica 52.1. Esquemas de métodos numéricos para una ecuación diferencial matricial estocástica . . 62.2. Sistema oscilante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.3. Sistema divergente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.4. Sistema convergente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3. Modelo de Lotka-Volterra 253.1. Formulación determinística . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 253.2. Formulación Estocasticas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
A. Tablas de la sección 2 30A.1. Sistema oscilante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30A.2. Sistema divergente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34A.3. Sistema convergente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
1. Solución de una ecuación diferencial estocástica
En esta sección vamos a trabajar con la ecuación diferencial estocástica
dX t = aX tdt + bX tdW t
para t ∈ [0, T ] y condición inicial X 0 ∈ R.La solución explicita para esta ecuación es
X t = X 0e(a−1
2b2)t+bW t
Conociendo la solución de la ecuación podemos calcular el error absoluto de la aproximación definidocomo
= E (|X (T ) − Y (T )|)
1
-
8/16/2019 Integracion_Estocastica
2/41
donde X (T ) es la solución exacta al final del intervalo e Y (T ) el valor de la solución aproximada en elmismo punto.
Además de estudiar el error absoluto vamos a construir intervalos de confianza para dicho error.Los métodos que vamos a estudiar son el de Euler-Maruyana y el de Milstein. Consideramos en
ambos casos una discretización del intervalo [0, 1] dada por 0 = t0 < t1 < . . . < tN = T donde∆t = ti+1 − ti es constante ∀i. Vamos a escribir X (T i) = X i.
1.1. Euler-Maruyana
El esquema utilizado por el método de Euler-Maruyana es
Y n+1 = Y n + aY n∆t + bY n∆W n (1)
donde ∆W n = W n+1 − W n es una variable aleatoria normal con media 0 y varianza ∆t, propiedadderivada del proceso de Wiener.
Vamos a utilizar el siguiente esquema para calcular la solución exacta
X n = X 0e(a−1
2b2)t+b
n
i=1 ∆W i+1
Para poder comparar los resultados es necesario que el proceso de Wiener sea el mismo en lasolución exacta y aproximada. Además queremos comparar los resultados al utilizar distintos pasospara la discretización. Por esta razón en la implementación calculamos la solución exacta para unacantidad grande de puntos generando los valores ∆W n. Luego reconstruimos el proceso de Wienerteniendo en cuenta que W n =
ni=1 ∆W i+1 para finalmente volver a calcular los valores de ∆W n para
los pasos elegidos en el método de Euler-Maruyana.En la figura 1 podemos ver la solución al problema para los pasos ∆1 = ∆t = 2
−2, ∆2 = ∆t = 2−4
y ∆3 = ∆t = 2−6.
Figura 1: Metodo de Euler-Maruyana
2
-
8/16/2019 Integracion_Estocastica
3/41
Para este ejemplo los valores obtenidos en t = 1 son
X (1) = 14.96
X ∆1(1) = 5.62
X ∆2(1) = 11.84
X ∆3(1) = 13.17
Es importante entender que la estocasticidad de la ecuación tiene como consecuencia que no ne-cesariamente en cada corrida en particular la solución en al final del intervalo es mejor con un pasomas chico. Además de que obviamente la solución exacta también varia por ser distinto el proceso deWiener involucrado.
Por ejemplo en la figura 2 vemos otra corrida con los mismos parametros
Figura 2: Metodo de Euler-Maruyana
Para este ejemplo los valores obtenidos en t = 1 son
X (1) = 1.38X ∆1(1) = 1.04
X ∆2(1) = 1.2
X ∆3(1) = 1.18
Por esta razón se utiliza como criterio para calcular el error al aproximar el definido por la ecuación
= E (|X (T ) − Y (T )|)
Claramente no podemos calcular de forma exacta este error. Para poder calcular una aproximaciónrealizamos una cantidad N de corridas utilizando en cada una un proceso de Wiener diferente ycalculamos el promedio
̂ = 1
N
N k=1
|X k(T ) − Y k(T )|
3
-
8/16/2019 Integracion_Estocastica
4/41
∆ 2−2 2−4 2−6
̂ 0.96 0.78 0.3
Cuadro 1: Errores en Euler-Maruyana
Para N = 100 obtuvimos los resultados que se observan el cuadro 1.Naturalmente si realizamos otra corrida, vamos a obtener valores distintos para el error promedio,pero por el teorema central del limite la distribución de errores tienden a una distribución normal conmedia .
Lo que vamos a hacer es estimar el valor de la varianza σ2 utilizando la distribución de t-Student,para poder construir un intervalo de confianza para el error promedio.
Como dijimos, en el limite, el error promedio sigue una distribución normal. Si realizamos M cálculos del error promedio con N repeticiones del experimento podemos calcular
̂ j = 1
N
N k=1
|X jk(T ) − Y jk
(T )|
es decir el error promedio j con j = 1, . . . , M . Ahora calculamos
̂ = 1
M
M i=1
i
y finalmente estimamos la varianza
σ2 = 1
M − 1
M j=1
( j − ̂)2
Ahora si podemos construirnos un intervalo de confianza
(̂ − ∆̂, ̂ + ∆̂)
donde
∆̂ = t1−α,M −1
σ2M
donde t1−α,M −1 esta determinado por la distribución t-Student con M − 1 grados de libertad.Por ejemplo, para M = 50, α = 0.05 y el resto de los parámetros como antes, tenemos un intervalo
(0.57, 0.65) para un paso ∆t = 2−4.
1.2. MilsteinEl esquema de Milstein simplemente agrega un termino al desarrollo de Taylor de la ecuación
estocástica, y queda de la forma
Y n+1 = Y n + aY n∆t + bY n∆W n + 1
2bb
(∆W n)2 − ∆t
En la figura 3 podemos ver la solución al problema para los pasos ∆1 = ∆t = 2
−2, ∆2 = ∆t = 2−4
y ∆3 = ∆t = 2−6.
Para este ejemplo los valores obtenidos en t = 1 son
X (1) = 6.34
X ∆1(1) = 5.45X ∆2(1) = 4.46
X ∆3(1) = 5.47
4
-
8/16/2019 Integracion_Estocastica
5/41
Figura 3: Metodo de Milstein
Y si calculamos un intervalo de confianza para el error para M = 50, α = 0.05 y el resto de losparámetros como antes, tenemos un intervalo (0.42, 0.49) para un paso ∆t = 2−4.
Debemos tener cuidad en la comparación con el método de Euler-Maruyana ya que para obtener
los resultados no utilizamos los mismos proceso de Wiener.
1.3. Comparación
Finalmente lo que vamos a hacer es realizar algunas comparaciones de ambos métodos. Para obtenerestos resultados hemos considerado los mismos procesos de Wiener.
En el gráfico 4 vemos, para los parametros que venimos utilizando y un ∆t = 2−5, la soluciónexacta, la aproximación de Euler-Maruyana y la de Milstein.
En la tabla 2 tenemos los intervalos de confianza con α = 0.05 para distintos valores de ∆t.
∆ 2−3 2−5 2−7
Euler (0.64, 0.76) (0.38, 0.43) (0.29, 0.31)
Milstein (0.40, 0.51) (0.27, 0.31) (0.17, 0.19)
Cuadro 2: Errores en Euler-Maruyana
2. Solución de una ecuación diferencial matricial estocástica
En esta sección vamos a trabajar con la ecuación diferencial estocástica
dX t = AX tdt + BX tdW t (2)
donde A ∈ R2x2, t ∈ [0, T ], condición inicial X 0 ∈ R2 y B ∈ R2x2 es diagonal. De esta forma, las
matrices A y B conmutan.
5
-
8/16/2019 Integracion_Estocastica
6/41
Figura 4: Comparación entre Euler y Milstein
La solución explicita para esta ecuación es
X t = e(A−1
2B2)t+BW tX 0
Vamos a estudiar nuevamente los métodos de Euler-Maruyana y Milstein y los errores, con la mismametodología que en la sección anterior, considerando cada una de las coordenadas de X por separado.
2.1. Esquemas de métodos numéricos para una ecuación diferencial matricial es-
tocástica
En esta subsección extenderemos al caso matricial los métodos de Euler-Maruyama y Milsteinexplicados en la secciones 1.1 y 1.2 respectivamente.
El esquema utilizado por el método de Euler-Maruyama en el caso de ecuaciones diferencialesmatriciales estocásticas como la ecuación 2, será
X (n + 1) = X (n) + AX (n)∆t + BX (n)∆W
donde ∆W n = W n+1 − W n es una variable aleatoria normal con media 0 y varianza ∆t, propiedadderivada del proceso de Wiener.
Para simplificar la notación en el esquema de Milstein, llamemos a = AX y b = B X . Considerandoque nuestro ruido es unidimensional, para cada componente k del vector X tendremos que el esquemade del método de Mistein quedará como
X k
(n + 1) = X k
(n) + ak
(n)∆t + bk
(n)∆W +
1
2 d
l=1bl ∂b
k
∂xl
(∆W )2
− ∆t
(3)
donde en nuestro caso, d = 2.
6
-
8/16/2019 Integracion_Estocastica
7/41
2.2. Sistema oscilante
Trabajamos primero el caso en que,
A =
0 1
−1 0
el cual sabemos que en el caso determinístico dará como resultado una dinámica oscilante.En todos los problemas vamos a analizar los casos para la matriz,
B =
σ 0
0 σ
con σ = 0.1, 0.25, 0.5 y 0.75.Como se puede observar tanto en la figura 5 y la figura 6, el sistema para σ = 0.1 presenta un
comportamiento casi oscilatorio, similar al caso en que la ecuación diferencial es determinística.
Figura 5: Sistema oscilante con σ = 0.1
A medida que aumentamos el valor de σ perdemos el aspecto oscilatorio y el vector X (t) se aproximaal vector nulo cada vez mas rápido. Si bien continuan existiendo las oscilaciones, son casi imperceptiles.
Es interesante observar que ninguno de los métodos refleja de forma correcta el comportamientode la solución analítica cuando σ = 0.1 (figura 5) y σ = 0.25 (figura 7), ya que en ambos casos, losmétodos numéricos indican un foco repulsor, cuando en realidad la solución análitica nos deja ver un
foco atractor.Para los casos σ = 0.5 (figura 8) y σ = 0.75 (figura 9) solo el método de Milstein refleja de forma
correcta el comportamiento de la solución analítica.
7
-
8/16/2019 Integracion_Estocastica
8/41
Figura 6: Diagrama de fase sistema oscilante con σ = 0.1
Figura 7: Sistema oscilante con σ = 0.25
En el cuadro 3 podemos observar intervalos de confianza para el error utilizando el método de
8
-
8/16/2019 Integracion_Estocastica
9/41
Figura 8: Sistema oscilante con σ = 0.5
Figura 9: Sistema oscilante con σ = 0.75
9
-
8/16/2019 Integracion_Estocastica
10/41
Milstein para σ = 0.5, distintos tiempos finales y para ∆ = 0.1 y ∆ = 0.01.1
Se puede observar en esta tabla que para tiempos cortos la aproximación es razonable, principal-mente con un paso chico.
T = 40 T = 20 T = 10 T = 5
x(t) exacto −1.91 139.20 −488.85 −317.32
∆ = 0.1 (46.02, 46.90) (191.75, 198.40) (311.93, 323.11) (64.1, 69.67)
x(t) exacto −2.07 138.25 −561.94 −323.49
∆ = 0.01 (1.25, 1.28) (12.11, 12.48) (25.63, 26.51) (7.42, 7.85)
Cuadro 3: Intervalos de confianza para el error de x(t) con Milstein y con σ = 0.5
En la tabla 4 podemos observar los mismos datos para la variable y(t). Es interesante notar que laaparente precisión que muestra el intervalo de confianza para T = 40 responde a una buena aproxima-ción cualitativa, ya que utilizando Milstein podemos observar que la variables tienden a 0 y para ese
tiempo la variable y(t) ya es nula. Los intervalos de confianza para los tiempos T = 20 y T = 10 dancuenta de esta situación ya que a pesar de que la variable y(t) tiene valores muy bajos, el intervalode confianza es demasiado grande para esos valores. Nuevamente la aproximación que tiene un menorerror relativo es para T = 5.
T = 40 T = 20 T = 10 T = 5
y(t) exacto −13, 91 −87.75 −6.25 1024
∆ = 0.1 (74.11, 76.06) (212.04, 217.19) (77.61, 78.55) (309.52, 317.16)
y(t) exacto −14.44 −87.15 −7.18 1044
∆ = 0.01 (2.99, 3.07) (12.59, 12.90) (6.46, 6.51 (24.89, 26.10)
Cuadro 4: Intervalos de confianza para el error de y(t) con Milstein y con σ = 0.5
En las tablas 5 y 6 comparamos los resultados para distintos valores de σ y distintos tiemposfinales, utilizando siempre un paso ∆ = 0.01. Nuevamente trabajamos solo con resultados del metodode Milstein ya que, como dijimos previamente, es el único método que refleja fielmente la dinámicadel sistema. Para la variable x(t) las aproximaciones son razonables para todos los tiempos menores oiguales a 20. Sin embargo la tabla correspondiente a la variable y(t) observamos errores grandes inclusopara T = 10
1Los valores de x(t) exactos estan asociados a la aproximación ya que utilizamos la misma simulación del procesode Wiener. Por esta razón hay dos valores, uno calculado con la simulación utilizada para calcular la aproximación con
∆ = 0.1 y otro calculado con ∆ = 0.01
10
-
8/16/2019 Integracion_Estocastica
11/41
T = 40 T = 20 T = 10 T = 5x(t) exacto −208.41 1385 −1716 −521.09
σ = 0.1 (47.26, 47.41) (144.38, 145.23) (88.00, 88.54) (13.04, 13.24)
x(t) exacto −74.43 877.37 −1348 −471.63
σ = 0.25 (23.32, 23.57)) (88.98, 90.11) (66.21, 67.16) (9.90, 10.31)
x(t) exacto −2.07 138.25 −561.94 −323.49
σ = 0.5 (1.25, 1.28) (12.11, 12.48) (25.63, 26.51) (7.42, 7.85)
x(t) exacto 0.00 6.83 −146.51 −177.96
σ = 0.75 (0.00, 0.00) (0.40, 0.42) (7.20, 7.51) (5.97, 6.50)
Cuadro 5: Intervalos de confianza para el error de x(t) con Milstein y ∆ = 0.01
T = 40 T = 20 T = 10 T = 5
y(t) exacto −1456 −873.05 −21.94 1682
σ = 0.1 (321.11, 322.73) (91.72, 92.14) (1.54, 1.61) (42.64, 43.05)
y(t) exacto −520.27 −533.06 −17.24 1522
σ = 0.25 (112.99, 114.70) (62.82, 63.46) (3.34, 3.44) (36.81, 37.71)
y(t) exacto −14.44 −87.15 −7.18 1044
σ = 0.5 (2.99, 3.07) (12.59, 12.90) (6.46, 6.51) (24.89, 26.10)
y(t) exacto −0.03 −4.30 −1.87 574.50
σ = 0.75 (0.01, 0.01) (0.81, 0.84) (3.57, 3.65) (16.51, 18.04)
Cuadro 6: Intervalos de confianza para el error de y(t) con Milstein y ∆ = 0.01
11
-
8/16/2019 Integracion_Estocastica
12/41
2.3. Sistema divergente
En segundo lugar, trabajamos el caso en que,
A =
0.1 0
0 0.1
el cual sabemos que en el caso determinístico dará como resultado dos curva que crecen indefini-
damente.Nuevamente analizamos los casos para la matriz,
B =
σ 0
0 σ
con σ = 0.1, 0.25, 0.5 y 0.75.Como se puede observar en las figuras 10 y 11, el sistema para σ = 0.1 presenta un comportamiento
divergente, al igual que en el caso determinístico. Si bien para el valor de σ igual a σ = 0.25 las soluciones
también divergen, se puede ver que el crecimiento se hace de una forma menos pronunciada (figuras 12y 13). Es importante notar, que en ambos casos (σ = 0.1 y σ = 0.25) la aproximación por el método deEuler-Maruyama crece más rapidamente que la solución analítica y que la aproximación por el métodode Milstein.
Figura 10: Sistema divergente con σ = 0.1
A medida que aumentamos el valor de σ las solución analítica deja de diverger y se aproxima al
vector nulo cada vez mas rápido, al igual que la aproximación por el método de Milstein. En cambio,la aproximación por el método de Euler-Maruyama, continúa presentando una dinámica divergente,mostrando una muy mala aproximación de la dinámica (figuras 14 y 15).
12
-
8/16/2019 Integracion_Estocastica
13/41
Figura 11: Diagrama de fase sistema divergente con σ = 0.1
Figura 12: Sistema divergente con σ = 0.25
13
-
8/16/2019 Integracion_Estocastica
14/41
Figura 13: Diagrama de fase sistema divergente con σ = 0.25
Figura 14: Sistema divergente con σ = 0.5
14
-
8/16/2019 Integracion_Estocastica
15/41
-
8/16/2019 Integracion_Estocastica
16/41
Figura 17: Diagrama de fase sistema divergente con σ = 0.75
Como característica general de este método, podemos ver que a medida que σ aumenta, la apro-
ximación en el punto final (T = 40) presenta valores más pèqueños. En todos los casos, podemos verque el método de Milstein aproxima muy bien la solución analítica (figuras 16 y 17).
Como el comportamiento del sistema cambia sustancialmente dependiendo el valor de σ vamos arealizar las mismas comparaciones que en el caso anterior pero tanto para σ = 0.25, donde las solucionescrecen indefinidamente, como para σ = 0.5 donde las soluciones tienden a 0.
En los cuadros 7 y 8 podemos observar intervalos de confianza para el error utilizando el métodode Milstein para σ = 0.25, distintos tiempos finales y para ∆ = 0.1 y ∆ = 0.01.
Se puede observar en ambas tablas que la aproximación es razonable en todos las casos incluso paratiempos grandes. Naturalmente, la precisión de la aproximación mejora cuando se achica el paso.
T = 40 T = 20 T = 10 T = 5
x(t) exacto 23776 6303 3025 2153
∆ = 0.1 (294.69, 312.32) (89.14, 95.62) (58.71, 62.67) (54.99, 58.16)
x(t) exacto 23674 6245 3139 2197
∆ = 0.01 (62.13, 66.59) (25.21, 26.90) (20.89, 21.99) (16.80, 18.06)
Cuadro 7: Intervalos de confianza para el error de x(t) con Milstein y con σ = 0.25
En las siguientes tablas (9 y 10) tenemos los mismos datos pero para σ = 0.5. Recordemos quecomo se puede ver en a figura 14, las soluciones tienden a 0. Nuevamente la aproximación es buena en
todos los casos.En las tablas 11 y 12 comparamos los resultados para distintos valores de σ y distintos tiemposfinales, utilizando siempre un paso ∆ = 0.01. En todos los casos el método de Milstein resulta enbuenas aproximaciones.
16
-
8/16/2019 Integracion_Estocastica
17/41
T = 40 T = 20 T = 10 T = 5
y(t) exacto 15850 4202 2017 1435
∆ = 0.1 (196.46, 208.21) (59.43, 63.75) (39.14, 41.78) (36.66, 38.77)
y(t) exacto 15783 4163 2092 1464∆ = 0.01 (41.42, 44.39) (16.81, 17.93) (13.93, 14.66 (11.20, 12.04)
Cuadro 8: Intervalos de confianza para el error de y(t) con Milstein y con σ = 0.25
T = 40 T = 20 T = 10 T = 5
x(t) exacto 577.83 994.80 1369 1662
∆ = 0.1 (10.87, 11.95)) (29.09, 31.19) (48.94, 53.13) (91.67, 98.32)
x(t) exacto 614.85 1041 1503 1497
∆ = 0.01 (3.60, 3.95) (8.05, 8.79) (16.81, 18.03) (22.96, 24.99)
Cuadro 9: Intervalos de confianza para el error de x(t) con Milstein y con σ = 0.5
T = 40 T = 20 T = 10 T = 5
y(t) exacto 385.22 663.20 913.25 1108
∆ = 0.1 (7.24, 7.97) (19.39, 20.79) (32.63, 35.42) (61.11, 65.55)
y(t) exacto 1409 694.31 1002 998.63
∆ = 0.01 (2.40, 2.64) (5.37, 5.86) (11.21, 12.02) (15.31, 16.66)
Cuadro 10: Intervalos de confianza para el error de y(t) con Milstein y con σ = 0.5
T = 40 T = 20 T = 10 T = 5
x(t) exacto 67757 10783 3862 2468
σ = 0.1 (139.38, 145.97) (20.91, 22.31) (10.17, 10.73) (9.29, 9.86)
x(t) exacto 23674 6245 3139 2197
σ = 0.25 (62.13, 66.59) (25.21, 26.90) (20.89, 21.99) (16.80, 18.06)
x(t) exacto 614.85 1041 1503 1497
σ = 0.5 (3.60, 3.95) (8.05, 8.79) (16.81, 18.03) (22.96, 24.99)
x(t) exacto 1.23 45.79 305.57 764.48
σ = 0.75 (0.01, 0.01) (0.64, 0.71) (5.63, 6.23) (17.95, 20.46)
Cuadro 11: Intervalos de confianza para el error de x(t) con Milstein y ∆ = 0.01
17
-
8/16/2019 Integracion_Estocastica
18/41
T = 40 T = 20 T = 10 T = 5
y(t) exacto 45171 6789 2575 1645
σ = 0.1 (92.92, 97.31) (13.94, 14.87) (6.78, 7.15) (6.20, 6.57)
y(t) exacto 15783 4163 2092 1464
σ = 0.25 (41.42, 44.39) (16.81, 17.93) (13.93, 14.66) (11.20, 12.04)
y(t) exacto 1409 694.31 1002 998.63
σ = 0.5 (2.40, 2.64) (5.37, 5.86) (11.21, 12.02) (15.31, 16.66)
y(t) exacto 0.82 30.53 203.72 509.65
σ = 0.75 (0.01, 0.01) (0.43, 0.48) (3.76, 4.15) (11.97, 13.64)
Cuadro 12: Intervalos de confianza para el error de y(t) con Milstein y ∆ = 0.01
18
-
8/16/2019 Integracion_Estocastica
19/41
2.4. Sistema convergente
Finalmente trabajamos el caso en que,
A =
0 1
−1 0
En este problema también vamos a analizar los casos para la matriz,
B =
σ 0
0 σ
con σ = 0.1, 0.25, 0.5 y 0.75.Si uno considera la ecuación matricial determinística, podría ver que las soluciones convergen a
un vector que no es el vector nulo, sino el vector X (t) = (1666.67, 833.33). Podemos ver que laincorporación de estocasticidad hace que el sistema converja, pero ahora hacia el vector nulo.
La velocidad de esta convergencia dependerá del valor que tome σ, haciendo que converja más
rapidamente al vector nulo a medida que σ aumenta. Esto se ve claramente en las figura
Figura 18: Sistema convergente con σ = 0.1
También es notorio, sin hacer aún un estudio de intervalos de confianza para el error, que elmétodo que mejor ajusta es el método de Milstein. La convergencia al vector nulo en el método deEuler-Maruyama es más lenta, lo cual muestra que no arroja una buena aproximación de la solución.
En los cuadros 13 y 14 podemos observar intervalos de confianza para el error utilizando el métodode Milstein para σ = 0.5, distintos tiempos finales y para ∆ = 0.1 y ∆ = 0.01.
Al igual que en el caso trabajado anteriormente, las aproximaciones son muy buenas en todos lostiempos, mejorando considerablemente al achicar el paso.
19
-
8/16/2019 Integracion_Estocastica
20/41
Figura 19: Diagrama de fase sistema convergente con σ = 0.1
Figura 20: Sistema convergente con σ = 0.25
20
-
8/16/2019 Integracion_Estocastica
21/41
Figura 21: Diagrama de fase sistema convergente con σ = 0.25
Figura 22: Sistema convergente con σ = 0.5
21
-
8/16/2019 Integracion_Estocastica
22/41
Figura 23: Diagrama de fase sistema convergente con σ = 0.5
Figura 24: Sistema convergente con σ = 0.75
22
-
8/16/2019 Integracion_Estocastica
23/41
Figura 25: Diagrama de fase sistema convergente con σ = 0.75
T = 40 T = 20 T = 10 T = 5
x(t) exacto 12.44 152.35 490.52 1042
∆ = 0.1 (0.41, 0.43) (4.96, 5.30) (19.08, 20.66) (51.25, 55.79)
x(t) exacto 12.38 158.52 614.15 965.30
∆ = 0.01 (0.08, 0.09) (1.56, 1.69) (6.34, 6.91) (16.11, 17.21)
Cuadro 13: Intervalos de confianza para el error de x(t) con Milstein y con σ = 0.5
En las tablas 15 y 16 comparamos los resultados para distintos valores de σ y distintos tiemposfinales, utilizando siempre un paso ∆ = 0.01. Al igual que en las tablas previas, vemos que las apro-
ximaciones son buenas para todos los valores de σ y para todos los tiempos finales, incluso cuandotenemos valores cercanos a 0.
23
-
8/16/2019 Integracion_Estocastica
24/41
T = 40 T = 20 T = 10 T = 5
y(t) exacto 6.22 77.32 262.04 598.67
∆ = 0.1 (0.21, 0.22) (2.54, 2.71) (10.23, 11.08) (29.35, 31.95)
y(t) exacto 6.19 80.45 328.10 554.44
∆ = 0.01 (0.04, 0.05) (0.79, 0.86) (3.39, 3.70) (9.24, 9.87)
Cuadro 14: Intervalos de confianza para el error de y(t) con Milstein y con σ = 0.5
T = 40 T = 20 T = 10 T = 5
x(t) exacto 1354 1522 1541 1534
σ = 0.1 (1.71, 1.81) (2.66, 2.79) (4.00, 4.26) (5.16, 5.43)
x(t) exacto 508.13 893.79 1284 1361
σ = 0.25 (1.46, 1.56) (4.18, 4.41) (7.03, 7.47) (11.07, 11.90)
x(t) exacto 12.38 158.52 614.15 965.30
σ = 0.5 (0.08, 0.09) (1.56, 1.69) (6.34, 6.91) (16.11, 17.21)
x(t) exacto 0.03 6.31 139.57 490.10
σ = 0.75 (0.00, 0.00) (0.09, 0.10) (3.14, 3.38) (11.91, 13.13)
Cuadro 15: Intervalos de confianza para el error de x(t) con Milstein y ∆ = 0.01
T = 40 T = 20 T = 10 T = 5
y(t) exacto 677.71 772.66 823.37 881.59
σ = 0.1 (0.85, 0.90) (1.35, 1.42) (2.15, 2.29) (2.98, 3.13)
y(t) exacto 254.25 453.60 686.03 782.12
σ = 0.25 (0.73, 0.78) (2.12, 2.24) (3.76, 3.99) (6.37, 6.84)
y(t) exacto 6.19 80.45 328.10 554.44
σ = 0.5 (0.04, 0.05) (0.79, 0.86) (3.39, 3.70) (9.24, 9.87)
y(t) exacto 0.01 3.20 74.57 281.50
σ = 0.75 (0.00, 0.00) (0.04, 0.05) (1.68, 1.81) (6.85, 7.55)
Cuadro 16: Intervalos de confianza para el error de y(t) con Milstein y ∆ = 0.01
24
-
8/16/2019 Integracion_Estocastica
25/41
3. Modelo de Lotka-Volterra
En esta sección presentamos el estudio de un modelo Lotka-Volterra presa-predador. Lo que haremosserá presentar el modelo determinístico, luego realizar la incorporación de estocasticidad en el mismo,para finalmente resolverlo mediante el método de Milstein.
3.1. Formulación determinísticaLa formulación determinística del modelo Lotka-Volterra presa-predador para dos poblaciones,
consiste en el sistema de ecuaciones diferenciales simultáneas:
dxdt
= Ax − Bxy
dydt
= −Cx + Dxy
donde x e y representan el número de presas y predadores, respectivamente, con A, B, C, D
constantes positivas que reflejan las condiciones de crecimiento de las especies y sus interacciones.Considerando los parámetros A = 0.4, B = 0.37, C = 0.3 y D = 0.05, la dinámica determinística
se puede observar en las figuras 26 y 27.
Figura 26: Dinámica Lotka-Volterra determinístico
3.2. Formulación Estocasticas
El modelo descripto en la sección 3.1 falla, por ejemplo, a la hora de describir fenómenos de cambiosmedioambientales, permanentes en un ecosistema natural.
25
-
8/16/2019 Integracion_Estocastica
26/41
Figura 27: Trayectoria del diagrama de fase para la condición inicial x=3, y=1
En general, se trata de analizar efectos de “ruidos” aleatorios causados por el ambiente, presentes
en las tasas de crecimiento intrínsecas de presas y depredadores y modelados mediante ruidos blancosgaussianos independientes en el modelo. Esto significa considerar un sistema de ecuaciones diferencialesestocásticas de Itô, de la forma
dx = [Ax − Bxy ] dt + g1 (x, y) dW 1 (t)
dy = [−Cx + Dxy] dt + g2 (x, y) dW 2 (t)
donde W (t) = (W 1(t), W 2(t)) es un proceso de Wiener bidimensional, y las funciones gi : R2 → R
son continuamente lipschitzianas.
Teniendo en cuenta que en la sección anterior trabajamos con procesos de Wiener unidimensionales,consideraremos que W 1 = W 2. Vamos a considerar ruidos aleatorios de tipo multiplicativo, con lasfunciones coeficientes g1(x, y) = σx y g2(x, y) = σy, donde sigma representa la intensidad de laperturbación aleatoria, en el intervalo [0, 1].
De esta forma, podemos escribir matricialmente el sistema anterior de la siguiente forma
dX (t) = a(X, t)dt + b(X, t)dW
donde
dX (t) =
dx(t)
dy(t)
; a(X, t) =
A − By(t)
−C + Dx(t)
·
x(t)
y(t)
; b(X, t) = σ
x(t)
y(t)
26
-
8/16/2019 Integracion_Estocastica
27/41
Para este sistema no contamos con una solución análitica, pero igualmente la podríamos aproximartanto con el método de Euler-Maruyama como con el de Milstein. Dados los resultados que vimos enla sección anterior, podemos considerar que el método de Milstein simula mejor la dinámica que elmétodo de Euler-Maruyama. Por lo tanto, abordaremos la aproximación de la solución con el métodode Milstein.
Al igual que antes, consideraremos una discretización del intervalo [0, T ] dada por 0 = t0 < t1 <
. . . < tN = T donde ∆t = ti+1 − ti es constante ∀i, con un valor de ∆t = 0.1. Vamos a escribirx(ti) = xi y y(ti) = yi.
Teniendo en cuenta el esquema de Milstein dado por la ecuación 2.1, tendremos que para este casoparticular la aproximación está dada por
xn+1 = xn + [A − Byn] xn∆t + σ1xn∆W n + 12(σ
21xn)((∆W )
2 − ∆t)
yn+1 = yn + [−C + Dxn] yn∆t + σ2yn∆W n + 12(σ
22yn)((∆W )
2 − ∆t)
donde ∆W n = W n+1 − W n es una variable aleatoria normal con media 0 y varianza ∆t, propiedadderivada del proceso de Wiener.
Para las simulaciones vamos a considerar los mismos valores de parámetros que en el caso deter-minístico, y diferentes valores de σ. Los resultados de las simulaciones se pueden ver en las figuras 28,29, 30 y 31.
Figura 28: Dinámica de Lokta-Volterra con σ = 0.1 y σ = 0.25
27
-
8/16/2019 Integracion_Estocastica
28/41
Figura 29: Dinámica de Lokta-Volterra con σ = 0.5 y σ = 0.75
Figura 30: Trayectoria del diagrama de fase para la condición inicial x3, y=1 con σ = 0.1 y σ = 0.25
28
-
8/16/2019 Integracion_Estocastica
29/41
Figura 31: Trayectoria del diagrama de fase para la condición inicial x3, y=1 con σ = 0.5 y σ = 0.75
29
-
8/16/2019 Integracion_Estocastica
30/41
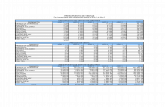
A. Tablas de la sección 2
En este apéndice mostramos las tablas completas con los datos de las aproximaciones realizadaspara cada uno de los problemas de la sección 2.
A.1. Sistema oscilante
σ 0.1 0.25 0.5 0.75
x(t) exacto −211.85 −79.31 −1.91 0.00
y(t) exacto −1480 −554.40 −13.91 0.00
x(t) Euler −115.49 −70.18 −153.30 −132.88
Intervalo (129.94, 135.96) (255.56, 268.30) (499.99, 526.28) (707.73, 757.65)
y(t) Euler −13302 −13832 −12952 −13507
Intervalo (11791, 11852) (13188, 13368) (12785, 13092) (13269, 13745)
x(t) Milstein −307.01 −519.58 −48.37 −0.20
Intervalo (116.73, 120.32) (439.71, 440.83) (46.02, 46.90) (0.19, 0.20)
y(t) Milstein −10962 −4098 −88.44 −0.10
Intervalo (9457, 9506) (3520, 3569) (74.11, 76.06) (0.06, 0.07)
Cuadro 17: Valores para el sistema oscilante con ∆ = 0.1 y T = 40
σ 0.1 0.25 0.5 0.75
x(t) exacto −208.41 −74.43 −2.07 0.00
y(t) exacto −1456 −520.27 −14.44 −0.03
x(t) Euler −306.58 −304.92 −324.60 −299.51
Intervalo (97.99, 98.36) (228.95, 232.03) (318.41, 326.67) (294.18, 304.4)
y(t) Euler −2162 −2149 −2311 −2120
Intervalo (703.75, 707.23) (1616, 1640) (2265, 2329) (2079, 2161)
x(t) Milstein −255.74 −97.87 −3.33 −0.01
Intervalo (47.26, 47.41) (23.32, 23.57) (1.25, 1.28) (0.00, 0.00)
y(t) Milstein −1778 −634.12 −17.47 −0.04
Intervalo (321.11, 322.73) (112.99, 114.70) (2.99, 3.07) (0.01, 0.01)
Cuadro 18: Valores para el sistema oscilante con ∆ = 0.01 y T = 40
30
-
8/16/2019 Integracion_Estocastica
31/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 1370 812.14 139.20 8.25y(t) exacto −863.63 −511.94 −87.75 −5.20
x(t) Euler 4233 4139 4218 4864
Intervalo (2856, 2871) (3307, 3347) (4016, 4141) (4766, 4946)
y(t) Euler −2298 −2253 −2289 −2554
Intervalo (1432, 1437) (1734, 1749) (2176, 2226) (2514, 2584)
x(t) Milstein 3833 2220 334.27 13.44
Intervalo (2456, 2469) (1399, 1416) (191.75, 198.40) (5.05, 5.34)
y(t) Milstein −2128 −1384 −302.36 −22.16
Intervalo (1262, 1266) (868.81, 875.97) (212.04, 217.19) (16.68, 17.24)
Cuadro 19: Valores para el sistema oscilante con ∆ = 0.1 y T = 20
σ 0.1 0.25 0.5 0.75
x(t) exacto 1385 877.37 138.25 6.83
y(t) exacto −873.05 −553.06 −87.15 −4.30
x(t) Euler 1683 1757 1645 1585
Intervalo (297.45, 299.09) (875.18, 885.076) (1485, 1528) (1544, 1612)
y(t) Euler −1059 −1105 −1036 −1000
Intervalo (186.05, 186.95) (549.38, 555.32) (935.98, 962.13) (975.35, 1016)
x(t) Milstein 1529 966.92 150.55 7.23
Intervalo (144.38, 145.23) (88.98, 90.11) (12.11, 12.48) (0.40, 0.42)
y(t) Milstein −964.98 −616.20 −99.90 −5.13
Intervalo (91.72, 92.14) (62.82, 63.46) (12.59, 12.90) (0.81, 0.84)
Cuadro 20: Valores para el sistema oscilante con ∆ = 0.01 y T = 20
31
-
8/16/2019 Integracion_Estocastica
32/41
σ 0.1 0.25 0.5 0.75
x(t) exacto −1697 −1401 −488.85 −136.01y(t) exacto −21.69 −17.91 −6.25 −1.74
x(t) Euler −2924 −3043 −2486 −2860
Intervalo (1224, 1230) (1632, 1652) (1964, 2031) (2668, 2780)
y(t) Euler −130.86 −149.52 −60.71 −112.83
Intervalo (108.21, 110.14) (132.60, 137.30) (90.40, 102.71) (172.41, 192.42)
x(t) Milstein −2797 −2305 −806.37 −218.02
Intervalo (1097, 1102) (898.78, 909.68) (311.93, 323.11) (80.032, 83.98)
y(t) Milstein −112.65 −48.87 71.83 48.62
Intervalo (90.069, 91.85) (53.23, 55.26) (77.61, 78.55) (49.89, 50.82)
Cuadro 21: Valores para el sistema oscilante con ∆ = 0.1 y T = 10
σ 0.1 0.25 0.5 0.75
x(t) exacto −1716 −1348 −561.94 −146.51
y(t) exacto −21.94 −17.24 −7.18 −1.87
x(t) Euler −1888 −1875 −1812 −1936
Intervalo (170.92, 171.83) (523.69, 529.59) (1235, 1266) (1756, 1823)
y(t) Euler −24.68 −24.33 −22.59 −27.14
Intervalo (2.77, 2.87) (7.20, 7.48) (15.13, 16.03) (25.28, 27.08)
x(t) Milstein −1805 −1415 −588.01 −153.85
Intervalo (88.00, 88.54) (66.21, 67.16) (25.63, 26.51) (7.20, 7.51)
y(t) Milstein −22.78 −14.38 −0.70 1.74
Intervalo (1.54, 1.61) (3.34, 3.44) (6.46, 6.51) (3.57, 3.65)
Cuadro 22: Valores para el sistema oscilante con ∆ = 0.01 y T = 10
32
-
8/16/2019 Integracion_Estocastica
33/41
-
8/16/2019 Integracion_Estocastica
34/41
A.2. Sistema divergente
σ 0.1 0.25 0.5 0.75
x(t) exacto 66961 23776 577.83 1.32
y(t) exacto 44640 15850 385.22 0.88
x(t) Euler 79758 78754 74042 74842
Intervalo (12753, 12841) (54413, 55543) (71778, 75150) (72337, 77344)
y(t) Euler 53172 52502 49361 49894
Intervalo (8502, 8560) (36275, 37028) (47852, 50100) (48224, 51562)
x(t) Milstein 65748 23511 575.70 1.24
Intervalo (1196, 1227) (294.69, 312.32) (10.87, 11.95) (0.08, 0.09)
y(t) Milstein 43832 15674 383.80 0.83
Intervalo (797.79, 818.52) (196.46, 208.21) (7.24, 7.97) (0.06, 0.06)
Cuadro 25: Valores para el sistema divergente con ∆ = 0.1 y T = 40
σ 0.1 0.25 0.5 0.75
x(t) exacto 67757 23674 614.85 1.23
y(t) exacto 45171 15783 1409 0.82
x(t) Euler 82169 79981 80523 70980
Intervalo (14352, 14471) (55647, 56964) (77944, 81872) (68988, 72970)
y(t) Euler 54779 53320 53682 47320
Intervalo (9568, 9647) (37098, 37976) (51962, 54581) (45992, 48646)
x(t) Milstein 67624 23664 615.66 1.22
Intervalo (139.38, 145.97) (62.13, 66.59) (3.60, 3.95) (0.01, 0.01)
y(t) Milstein 45082 15776 410.44 0.81
Intervalo (92.92, 97.31) (41.42, 44.39) (2.40, 2.64) (0.01, 0.01)
Cuadro 26: Valores para el sistema divergente con ∆ = 0.01 y T = 40
34
-
8/16/2019 Integracion_Estocastica
35/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 10037 6303 994.80 58.89y(t) exacto 6691 4202 663.20 39.26
x(t) Euler 10940 11276 10588 12071
Intervalo (898.86, 905.66) (4931, 5014) (9435, 9753) (11682, 12342)
y(t) Euler 7293 7517 7059 8047
Intervalo (599.24, 603.77) (3287, 3342) (6290, 6502) (7788, 8228)
x(t) Milstein 9956 6258 993.96 56.65
Intervalo (84.85, 90.28) (89.14, 95.62) (29.09, 31.19) (3.14, 3.33)
y(t) Milstein 6637 4172 662.64 37.77
Intervalo (56.56, 60.18) (59.43, 63.75) (19.39, 20.79) (2.09, 2.22)
Cuadro 27: Valores para el sistema divergente con ∆ = 0.1 y T = 20
σ 0.1 0.25 0.5 0.75
x(t) exacto 10183 6245 1041 45.79
y(t) exacto 6789 4163 694.31 30.53
x(t) Euler 11187 11303 11181 9616
Intervalo (999.85, 1008) (5006, 5107) (9944, 10335) (9185, 9957)
y(t) Euler 7458 7535 7454 6411
Intervalo (666.56, 672.31) (3337, 3405) (6629, 6890) (6123, 6638)
x(t) Milstein 10174 6245 1040 45.82
Intervalo (20.91, 22.31) (25.21, 26.90) (8.05, 8.79) (0.64, 0.71)
y(t) Milstein 6783 4163 693.96 30.55
Intervalo (13.94, 14.87) (16.81, 17.93) (5.37, 5.86) (0.43, 0.48)
Cuadro 28: Valores para el sistema divergente con ∆ = 0.01 y T = 20
35
-
8/16/2019 Integracion_Estocastica
36/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 3962 3025 1369 337.15y(t) exacto 2641 2017 913.25 224.77
x(t) Euler 4114 4003 4185 4200
Intervalo (150.47, 153.55) (967.55, 988.01) (2767, 2862) (3719, 4006)
y(t) Euler 2742 2669 2790 2800
Intervalo (100.31, 102.37) (645.04, 658.67) (1844, 1908) (2479, 2670)
x(t) Milstein 3935 3027 1361 334.18
Intervalo (38.53, 40.36) (58.71, 62.67) (48.94, 53.13) (18.97, 21.51)
y(t) Milstein 2623 2018 907.91 222.79
Intervalo (25.69, 26.90) (39.14, 41.78) (32.63, 35.42) (12.65, 14.34)
Cuadro 29: Valores para el sistema divergente con ∆ = 0.1 y T = 10
σ 0.1 0.25 0.5 0.75
x(t) exacto 3862 3139 1503 305.57
y(t) exacto 2575 2092 1002 203.72
x(t) Euler 4036 4159 4638 3818
Intervalo (172.35, 173.85) (1012, 1028) (3077, 3193) (3380, 3644)
y(t) Euler 2690 2772 3092 2545
Intervalo (114.90, 115.90) (674.70, 685.59) (2051, 2129) (2253, 2429)
x(t) Milstein 3858 3139 1507 303.73
Intervalo (10.17, 10.73) (20.89, 21.99) (16.81, 18.03) (5.63, 6.23)
y(t) Milstein 2572 2093 1004 202.49
Intervalo (6.78, 7.15) (13.93, 14.66) (11.21, 12.02) (3.76, 4.15)
Cuadro 30: Valores para el sistema divergente con ∆ = 0.01 y T = 10
36
-
8/16/2019 Integracion_Estocastica
37/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 2437 2153 1662 894.06y(t) exacto 1624 1435 1108 596.04
x(t) Euler 2482 2442 2744 2704
Intervalo (46.75, 49.02) (284.70, 292.94) (1060, 1105) (1756, 1864)
y(t) Euler 1655.05 1628.18 1829.96 1803.05
Intervalo (31.16, 32.68) (189.80, 195.29) (706.85, 736.91) (1170, 1243)
x(t) Milstein 2433 2155 1669 881.95
Intervalo (25.99, 27.61) (54.99, 58.16) (91.67, 98.32) (84.74, 91.53)
y(t) Milstein 1622 1437 1113 587.97
Intervalo (17.32, 18.40) (36.66, 38.77) (61.11, 65.55) (56.49, 61.02)
Cuadro 31: Valores para el sistema divergente con ∆ = 0.1 y T = 5
σ 0.1 0.25 0.5 0.75
x(t) exacto 2468 2197 1497 764.48
y(t) exacto 1645 1464 998.63 509.65
x(t) Euler 2518 2487 2471 2326
Intervalo (50.12, 51.02) (287.64, 292.88) (957.36, 990.33) (1504, 1620)
y(t) Euler 1679 1658 1647 1551
Intervalo (33.41, 34.01) (191.76, 195.25) (638.24, 660.22) (1002, 1080)
x(t) Milstein 2468 2195 1498 754.54
Intervalo (9.29, 9.86) (16.80, 18.06) (22.96, 24.99) (17.95, 20.46)
y(t) Milstein 1645 1463 998.93 503.03
Intervalo (6.20, 6.57) (11.20, 12.04) (15.31, 16.66) (11.97, 13.64)
Cuadro 32: Valores para el sistema divergente con ∆ = 0.01 y T = 5
37
-
8/16/2019 Integracion_Estocastica
38/41
A.3. Sistema convergente
σ 0.1 0.25 0.5 0.75
x(t) exacto 1362 476.86 12.44 0.03
y(t) exacto 681.56 238.61 6.22 0.02
x(t) Euler 1654 1616 1624 1760
Intervalo (291.34, 293.62) (1126, 1152) (1582, 1641) (1711, 1809)
y(t) Euler 827.88 808.78 812.76 880.71
Intervalo (145.75, 146.89) (563.86, 576.48) (791.59, 821.50) (856.24, 905.14)
x(t) Milstein 1361 476.953 12.04 0.00
Intervalo (5.00, 5.35) (4.33, 4.64) (0.41, 0.43) (0.00, 0.00)
y(t) Milstein 681.16 238.64 6.02 0.01
Intervalo (2.50, 2.68) (2.17, 2.32) (0.21, 0.22) (0.00, 0.00)
Cuadro 33: Valores para el sistema convergente con ∆ = 0.1 y T = 40
σ 0.1 0.25 0.5 0.75
x(t) exacto 1354 508.13 12.38 0.03
y(t) exacto 677.71 254.25 6.19 0.01
x(t) Euler 1646 1719 1620 1539
Intervalo (290.67, 292.80) (1198, 1223) (1570, 1646) (1479, 1599)
y(t) Euler 823.68 860.14 811.06 770.24
Intervalo (145.44, 146.51) (599.79, 611.99) (785.93, 823.80) (740.33, 800.13)
x(t) Milstein 1354 508.08 12.33 0.02
Intervalo (1.71, 1.81) (1.46, 1.56) (0.08, 0.09) (0.00, 0.00)
y(t) Milstein 677.75 254.23 6.17 0.01
Intervalo (0.85, 0.90) (0.73, 0.78) (0.04, 0.05) (0.00, 0.00)
Cuadro 34: Valores para el sistema convergente con ∆ = 0.01 y T = 40
38
-
8/16/2019 Integracion_Estocastica
39/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 1515 889.13 152.35 7.46y(t) exacto 768.98 451.24 77.32 3.78
x(t) Euler 1664 1605 1633 1566
Intervalo (148.96, 150.16) (708.98, 723.59) (1449, 1513) (1504, 1613)
y(t) Euler 844.60 814.48 828.94 794.64
Intervalo (75.31, 75.93) (359.54, 366.95) (735.49, 767.75) (763.25, 818.45)
x(t) Milstein 1513 885.57 149.80 6.91
Intervalo (7.74, 8.17) (13.18, 14.08) (4.96, 5.30) (0.57, 0.62)
y(t) Milstein 768.00 449.22 75.96 3.50
Intervalo (3.95, 4.17) (6.72, 7.18) (2.54, 2.71) (0.29, 0.32)
Cuadro 35: Valores para el sistema convergente con ∆ = 0.1 y T = 20
σ 0.1 0.25 0.5 0.75
x(t) exacto 1522 893.79 158.52 6.31
y(t) exacto 772.66 453.60 80.45 3.20
x(t) Euler 1673 1617 1703 1317
Intervalo (150.92, 152.02) (717.44, 730.81) (1511, 1577) (1251, 1370)
y(t) Euler 849.50 821.07 864.35 668.63
Intervalo (76.57, 77.12) (364.08, 370.86) (767.26, 800.54) (635.30, 695.56)
x(t) Milstein 1522 893.41 158.35 6.24
Intervalo (2.66, 2.79) (4.18, 4.41) (1.56, 1.69) (0.09, 0.10)
y(t) Milstein 772.50 453.39 80.35 3.17
Intervalo (1.35, 1.42) (2.12, 2.24) (0.79, 0.86) (0.04, 0.05)
Cuadro 36: Valores para el sistema convergente con ∆ = 0.01 y T = 20
39
-
8/16/2019 Integracion_Estocastica
40/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 1551 1210 490.51 146.01y(t) exacto 829.00 646.94 262.04 78.00
x(t) Euler 1625 1609 1516 1887
Intervalo (73.33, 74.74) (393.99, 402.23) (1003, 1048) (1701, 1782)
y(t) Euler 867.90 858.99 809.66 1007
Intervalo (38.53, 39.28) (209.84, 214.25) (535.70, 559.52) (908.16, 951.76)
x(t) Milstein 1554 1213 487.88 144.48
Intervalo (12.05, 12.86) (20.73, 22.14) (19.08, 20.66) (8.59, 9.28)
y(t) Milstein 829.61 647.78 260.14 76.95
Intervalo (6.39, 6.81) (11.08, 11.84) (10.23, 11.08) (4.64, 5.01)
Cuadro 37: Valores para el sistema convergente con ∆ = 0.1 y T = 10
σ 0.1 0.25 0.5 0.75
x(t) exacto 1541 1284 614.15 139.57
y(t) exacto 823.37 686.03 328.10 74.57
x(t) Euler 1611 1700 1888 1758
Intervalo (70.25, 70.85) (412.84, 419.73) (1250, 1298) (1573, 1664)
y(t) Euler 861.00 908.36 1008 939.57
Intervalo (37.46, 37.79) (220.49, 224.17) (667.74, 693.70) (840.70, 889.31)
x(t) Milstein 1540 1283 613.24 139.09
Intervalo (4.00, 4.26) (7.03, 7.47) (6.34, 6.91) (3.14, 3.38)
y(t) Milstein 823.11 685.68 327.56 74.28
Intervalo (2.15, 2.29) (3.76, 3.99) (3.39, 3.70) (1.68, 1.81)
Cuadro 38: Valores para el sistema convergente con ∆ = 0.01 y T = 10
40
-
8/16/2019 Integracion_Estocastica
41/41
σ 0.1 0.25 0.5 0.75
x(t) exacto 1551 1418 1042 616.79y(t) exacto 890.91 814.651 598.67 354.26
x(t) Euler 1581 1621 1726 1935
Intervalo (32.32, 33.67) (200.26, 205.08) (672.36, 695.34) (1283, 1353)
y(t) Euler 907.60 930.38 990.89 1111
Intervalo (18.00, 18.76) (114.33, 117.12) (385.60, 398.84) (736.65, 776.87)
x(t) Milstein 1549 1428 1046 615.52
Intervalo (17.87, 18.91) (38.70, 41.03) (51.25, 55.79) (50.94, 55.27)
y(t) Milstein 889.44 819.59 600.01 352.57
Intervalo (10.27, 10.88) (22.18, 23.51) (29.35, 31.95) (29.37, 31.86)
Cuadro 39: Valores para el sistema convergente con ∆ = 0.1 y T = 5
σ 0.1 0.25 0.5 0.75
x(t) exacto 1534 1361 965.30 490.10
y(t) exacto 881.59 782.12 554.44 281.50
x(t) Euler 1565 1542 1591 1505
Intervalo (30.23, 30.78) (178.82, 183.06) (615.81, 636.25) (976.19, 1054)
y(t) Euler 899.04 885.98 913.94 864.57
Intervalo (17.29, 17.61) (102.64, 105.07) (353.64, 365.38) (560.60, 605.55)
x(t) Milstein 1534 1361 964.42 488.53
Intervalo (5.16, 5.43) (11.07, 11.90) (16.11, 17.21) (11.91, 13.13)
y(t) Milstein 881.21 781.81 553.84 280.50
Intervalo (2.98, 3.13) (6.37, 6.84) (9.24, 9.87) (6.85, 7.55)
Cuadro 40: Valores para el sistema convergente con ∆ = 0.01 y T = 5