Inverter de CA del vector del ascensor ARTDriveL
224
...... Manual de instrucciones ARTDriveL Inverter de CA del vector del ascensor ARTDriveL AVy...-...-AC AVy...-...-AC4 AVy...-...-BR AVy...-...-BR4
Transcript of Inverter de CA del vector del ascensor ARTDriveL

...... Manual de instrucciones
AR
TDriv
eLInverter de CA del vector delascensor
ARTDriveLAVy...-...-AC
AVy...-...-AC4
AVy...-...-BR
AVy...-...-BR4

Gracias por elegir este producto Gefran.Nos alegraríamos de recibir cualquier posible información que nos pudiera ayudar amejorar este manual. La dirección de correo electrónico es la siguiente:[email protected] de utilizar el producto, lea con atención la sección de instrucciones de seguridad.Guarde el manual en un lugar seguro y al alcance del personal de instalación yingeniería durante el período de funcionamiento del producto.Gefran S.p.A tiene el derecho de modificar los productos, la información y lasdimensiones sin previo aviso.La información sólo se puede utilizar para la descripción del producto y no se puedeentender como las propiedades legalmente indicadas.Todos los derechos reservados.
Este manual está actualizado según la versión del software 3.6XX y tarjeta deregulación RV33-4NV.El número de identificación de la versión del software se puede leer en la placa delconvertidor o en la etiqueta de las memorias FLASH instaladas en la tarjeta deregulación.

ARTDriveL Manual de instrucciones Tabla de contenidos • 3
Índice
Leyenda de símbolos de seguridad .................................................................................. 6
Capítulo 0 – Precauciones de seguridad ......................................................................... 7
Capítulo 1 – Funciones y características generales ......................................................111.1 Drive ......................................................................................................................................... 111.2 Motores y encoders ................................................................................................................. 13
Capítulo 2 – Procedimientos de inspección, identificación de componentes yespecificaciones estándar .............................................................................15
2.1 Acerca de los procedimientos de inspección de reparto ......................................................... 152.1.1 General .................................................................................................................................................... 152.1.2 Designación del tipo del convertidor ........................................................................................................ 152.1.3 Placa de carcaterísticas .......................................................................................................................... 16
Figura 2.1.3.1: Placa de identificación ......................................................................................................... 16Figura 2.1.3.2: Placa de características del Firmware & Nivel de revisión de la placa ................................. 16Figura 2.1.3.3: Posición de la placa de características ................................................................................ 16
2.2 Identificación de componentes ................................................................................................ 17Figura 2.2.1: Configuración básica del convertidor de frecuencia ............................................................... 17
2.3 Especificaciones estándar ....................................................................................................... 182.3.1 Especificaciones ambientales ................................................................................................................. 18Eliminación del dispositivo ............................................................................................................................... 192.3.2 Conexión de Entrada/Salida de CA ........................................................................................................... 192.3.3 Intensidad del lado red ............................................................................................................................. 192.3.4 Salida ....................................................................................................................................................... 19
Figura 2.3.4.1: Índice del Drive en funciones de cambio de frecuencia ........................................................ 20Tabla 2.3.4.1: Datos técnicos en entrada y salida ......................................................................................... 21Tabla 2.3.4.2-A: Capacidad de sobrecarga (Tamaños 1007 ... 4370) ............................................................. 22Tabla 2.3.4.2-B: Capacidad de sobrecarga (Tamaños 5450... 81600) ............................................................ 23
2.3.5 E/S y especificaciones del encoder .......................................................................................................... 242.3.6 Precisión .................................................................................................................................................. 24
Tabla 2.3.6.1: Frecuencia de salida máxima/mínima .................................................................................... 24Tabla 2.3.6.4: Especificaciones de par ......................................................................................................... 25Tabla 2.3.6.2: Referencia de velocidad / Resolución de realimentación y Límites máximos .......................... 25Tabla 2.3.6.3: Anchura de banda del regulador de velocidad ....................................................................... 25
Capítulo 3 – Especificaciones mecánicas ......................................................................263.1 Dimensiones y métodos de montaje ........................................................................................ 26
Figura 3.1.1: Dimensiones del drive (Tamaños 1007 ... 3150) ...................................................................... 26Figura 3.1.2: Métodos de montaje (Tamaños 1007 ... 3150) ....................................................................... 26Tabla 3.1.1: Dimensiones del drive y pesos (Tamaños 1007 ... 3150) ........................................................ 27Figura 3.1.3: Dimensiones del drive (Tamaños 4220 ... 81600) ................................................................... 27Figura 3.1.4: Métodos de montaje (Tamaños 4220 ... 81600) ...................................................................... 28Tabla 3.1.2: Dimensiones del drive y pesos (Tamaños 4220 ... 81600) ........................................................ 28Figura 3.1.5: Ubicación del teclado ............................................................................................................. 28
3.2 Perdida de Watts, disipación del calor, ventiladores internos y apertura mínima del armariosugerida para la refrigeración ................................................................................................. 29Tabla 3.2.1: Disipación del calor y flujo de aire requerido ............................................................................ 29Tabla 3.2.2: Abertura mínima del armario sugerida para la refrigeración ..................................................... 29
3.2.1 Intensidad de la alimentación de los ventiladores ................................................................................... 30

4 • Tabla de contenidos ARTDriveL Manual de instrucciones
Figura 3.2.1: Conexiones de ventiladores del tipo UL en los tamaños AVy7900, AVy71100 y AVy71320 ....... 30Figura 3.2.2: Conexiones de ventiladores del tipo UL en los tamaños AVy6750 y AVy81600 ......................... 30Figura 3.2.3: Ejemplo para la conexión externa ............................................................................................ 31
3.3 Espacios libres en el montaje e instalación ............................................................................. 32Figura 3.3.1: Ángulo máximo de inclinación ................................................................................................ 32Figura 3.3.2: Espacio libre en el montaje ..................................................................................................... 32
Capítulo 4 – Conexión eléctrica ......................................................................................334.1 Acceso a los conectores ......................................................................................................... 33
4.1.1 Extracción de la cubierta ......................................................................................................................... 33Figura 4.1.1: Extracción de las cubiertas (tamaños 1007 ... 3150) ................................................................ 33Figura 4.1.2: Retirada de las cubiertas (tamaños 4185... 81600) .................................................................. 34
4.2 Parte de potencia ..................................................................................................................... 344.2.1 Denominación de los bornes de potencia / sección de los cables ........................................................... 35
Figura 4.2.1.1: Terminales de la sección de alimentación desde 1007 hasta 3150 ........................................ 35Figura 4.2.1.2: Terminales de la sección de alimentación desde 4185 hasta 81600 ...................................... 35Tabla 4.2.1.3: Sección máxima de cable para los terminales de alimentación ............................................. 36Tabla 4.2.1.4: Sección máxima de cable permisible en los terminales conectados de la sección del regulador................................................................................................................................................................... 37
Tabla 4.2.1.5: Longitudes máximas del cable de control ............................................................................... 374.3 Sección de regulación ............................................................................................................. 38
4.3.1 Puentes y conmutador de la tarjeta de regulación RV33-4NV .................................................................. 38Tabla 4.3.1.1: LEDs y puntos de prueba en la tarjeta de regulación ............................................................... 38Tabla 4.3.1.2: Puentes y conmutadores DIP en la tarjeta de regulación RV33-4 ............................................ 39
4.3.2 Asignación del terminal en la sección de regulación ............................................................................... 40Tabla 4.3.2.1: Asignaciones de la placa del terminal conectado ................................................................... 40
4.4 Potenciales de la sección de control ....................................................................................... 41Figura 4.4.1-A: Potenciales de la sección de control, Conexión NPN E/S Digital .......................................... 41Figura 4.4.1-B: Potenciales de la sección de control, Conexión PNP E/S Digital .......................................... 42
4.5 Encoders .................................................................................................................................. 43Tabla 4.5.1: Sección y longitud de cable recomendada para la conexión de los encoders ............................ 44Tabla 4.5.2: Ajuste de los encoders mediante los puentes S11...S23 ............................................................ 44Tabla 4.5.3: Conexiones de los encoders ..................................................................................................... 44Tabla 4.5.4: Asignación del conector XE de alta densidad para un encoder sinusoidal o digital .................... 47
4.5.1 Asignaciones del conector XFR (en una tarjeta de expansión EXP-RES opcional para la resolución) ...... 474.5.2 Simulación del encoder ............................................................................................................................ 484.5.3 Asignaciones de conector XE1/XE (en tarjetas RV33-4NV y EXP-ABS-AVy opcional) ............................. 48
4.6 Diagramas de conexión ........................................................................................................... 50Figura 4.6.1: Diagrama de conexión estándar .............................................................................................. 50
4.6.1 Conexión de la tarjeta de expansión ........................................................................................................ 51Figura 4.6.2: Gestión de los contactores de salida comunes ......................................................................... 51Figura 4.6.3: Gestión de los contactores de salida separados ....................................................................... 52
4.7 Protección del circuito ............................................................................................................. 534.7.1 Fusibles externos para la sección de potencia ........................................................................................ 53
Tabla 4.7.1.1: Tipos de fusible externo para la parte de la entrada de CA ..................................................... 534.7.2 Fusibles externos para la parte de entrada de CC de la sección de potencia ........................................... 54
Tabla 4.7.2.1: Tipos de fusibles externos para la parte de la entrada de CC .................................................. 544.7.3 Fusibles internos ..................................................................................................................................... 54
Tabla 4.7.3.1: Fusibles internos .................................................................................................................... 544.8 Difusores/Filtros ....................................................................................................................... 55
4.8.1 Difusores de entrada de CA ...................................................................................................................... 55Tabla 4.8.1.1: Difusores de entrada de CA de tres fases ................................................................................ 55
4.8.2 Difusores de salida .................................................................................................................................. 55

ARTDriveL Manual de instrucciones Tabla de contenidos • 5
Tabla 4.8.2.1: Difusores de salida recomendados ......................................................................................... 564.8.3 Filtros de supresión de interferencias ..................................................................................................... 56
4.9. Unidades de frenado ............................................................................................................... 57Figura 4.9.1: Funcionamiento con la unidad de frenado (Principio) .............................................................. 57
4.9.1 Unidad de frenado interna ........................................................................................................................ 58Figura 4.9.1.1: Conexión con la unidad de frenado interna y el reóstato de frenado externo ......................... 58
4.9.2 Listas e información técnica de las resistencias estándares externas ................................................... 58Tabla 4.9.2.1: Listas e información técnica de las resistencias estándares externas ...................................... 58Figura 4.9.2.1: Ciclo de frenado de funcionamiento límite con perfil de potencia triangular típico ................ 59Figura 4.9.2.2: Ciclo de frenado con TBR / TC = 20% .................................................................................. 59Figura 4.9.2.3: Ciclo de frenado genérico con perfil triangular ..................................................................... 60Tabla 4.9.2.2: Umbrales de frenado para diferentes redes ............................................................................ 61Tabla 4.9.2.3: Información técnica de las unidades de frenado internas ....................................................... 61
4.10 Proteger la fuente del regulador ............................................................................................ 62Tabla 4.10.1: Tiempo de búfer del enlace de CC .......................................................................................... 62Figura 4.10.1: Proteger la fuente del regulador mediante condensadores de circuito intermedio adicionales 63
4.11 Tiempo de descarga del enlace de CC .................................................................................. 64Tabla 4.11.1: Tiempo de descarga del enlace de CC .................................................................................... 64
Capítulo 5 - Descripción del interface serie RS 485 ......................................................65Figura 5.1: Linea serie RS485 ...................................................................................................................... 65
5.1 Descripción del conecor pr la línea serie RS485 ...................................................................... 66Tabla 5.1.1: Disposición del conector XS para la línea serie RS485 ............................................................. 66
Capítulo 6 – Funcionamiento del teclado ........................................................................676.1 LEDs y teclas ........................................................................................................................... 676.2 Moverse dentro de un menú ................................................................................................... 696.3 Utilizar la Ayuda del teclado .................................................................................................... 696.4 Menú principal del drive .......................................................................................................... 70
Capítulo 7 – Pruebas finales mediante el teclado ..........................................................717.1 Pruebas finales para AVy...AC / AC4 (Motores asíncronos) ................................................... 71
7.1.1 Modo con orientación de campo .............................................................................................................. 737.1.2 Modo del vector Sensorless .................................................................................................................... 837.1.3 Modo de control V/f .................................................................................................................................. 84
7.2 finales para AVy...BR / BR4 (Motores sin escobillas) ............................................................. 97
Capítulo 8 – Secuencias del ascensor ..........................................................................113Figura 8.1: Secuencia de comandos estándar ............................................................................................ 115Figura 8.2: Inicio detallado ........................................................................................................................ 116Figura 8.3: Detención detallada ................................................................................................................. 117Figura 8.4: Relación entre los comandos de dirección y las señales de control del contactor ..................... 118Figura 8.5: Función plano corto ................................................................................................................. 119
Capítulo 9 – Parámetros ...............................................................................................1219.1 Leyenda de los parámetros .................................................................................................... 1219.2 Descripción del parámetro ..................................................................................................... 122
Capítulo 10 – Solucionar problemas .............................................................................206Figura 10.1: Teclado y estado del Led ........................................................................................................ 206
10.1 Lista de eventos de alarma de regulación ........................................................................... 207Tabla 10.1.1 Eventos de alarma de regulación ........................................................................................... 208
10.2 Lista de eventos de alarma de error de la base de datos y de la configuración ................. 210

6 • Capítulo 0 - Precauciones de seguridad ARTDriveL Manual de instrucciones
Leyenda de símbolos de seguridad
Destacar procedimientos y posibles condiciones de funcionamientoque, si no se respetan, pueden provocar graves lesiones físicas o dañosmateriales.
Destacar procedimientos y posibles condiciones de funcionamientoque, si no se respetan, pueden provocar daños a otros aparatos o alinverter mismo.
Indica un procedimiento o una condición de funcionamiento que si sesigue puede optimizar estas aplicaciones.
¡NOTA! Llamar la atención de procedimientos y condiciones de funcionamientoespeciales.
10.2.1 Errores de configuración ...................................................................................................................... 21010.2.2 Errores de la base de datos (Errori DB) ................................................................................................ 21110.2.3 Lista de códigos de error para todos los procedimientos de regulación automática ........................... 213
Tabla 10.2.3.1: Mensajes de error de los procedimientos de regulación automática .................................. 213
Capítulo 11 – Directiva de la EMC ................................................................................214
Capítulo 12 – Índice de parámetros ..............................................................................215
IPAs ............................................................................................................................................ 215

ARTDriveL Manual de instrucciones Capítulo 0 - Precauciones de seguridad • 7
Capítulo 0 – Precauciones de seguridad
Conforme a la directiva CEE, el inverter ARTDriveL y los accesoriosdeben emplearse sólo después de haberse asegurado de que los equiposse han fabricado utilizando aquellos dispositivos de seguridad exigidospor la directiva 89/392/CE, relativa al sector de automatización.Estos sistemas producen movimientos mecánicos. El usuario esresponsable de asegurarse de que estos movimientos mecánicos nose convierten en situaciones de inseguridad. El fabricante debe preverbloques de seguridad y limitadores de funcionamiento que no puedanser puenteados o rebasados.
Peligro de Incendio y de Electrocución:Cuando se utilicen instrumentos como osciloscopios que funcionenen equipos sin tensión, la carcasa del osciloscopio debe ponerse atierra y debe emplearse un amplificador diferencial. Para obtenerlecturas exactas, elegir con cuidado sondas y terminales y prestaratención a la regulación del osciloscopio.Consultar el manual de instrucciones del fabricante para un correctoempleo y para la regulación de la instrumentación.
Peligro de incendio y de explosión:La instalación del inverter en zonas de peligro, en que estén presentessustancias inflamables, vapores combustibles o polvos, puedeprovocar incendios o explosiones. Los inverters deben instalarsealejados de estas zonas de riesgo, aun cuando se utilicen con motoresadaptados para su empleo en estas condiciones.
Peligro de Lesiones Físicas:Una manipulación incorrecta puede provocar graves daños o inclusola muerte. Para levantar el equipo deben emplearse herramientasadecuadas o recurrir a personal cualificado.
Los motores y los inverters deben conectarse a la puesta a tierra deacuerdo con las normativas eléctricas nacionales.
Recolocar todas las tapas antes de aplicar tensión al dispositivo. Lano observación de esta advertencia puede provocar la muerte o graveslesiones físicas a la persona.
Los inverters de frecuencia variable son equipos eléctricos para suempleo en instalaciones industriales. Partes del inverter están bajotensión durante el funcionamiento. La instalación eléctrica y laapertura del dispositivo deben ser realizados sólo por personalcualificado. Las instalaciones incorrectas de motores pueden dañarel dispositivo y provocar lesiones o daños materiales.El inverter no está provisto de protección contra aceleración delmotor.Consultar las instrucciones señaladas en este manual y observar lasnormativas de seguridad locales y nacionales.
Realizar las conexiones de tierra (PE) siempre mediante loscorrespondientes bornes (PE2) y la envolvente metálica (PE1). Losinverters de frecuencia variable y los filtros de entrada CA poseenuna corriente de dispersión hacia tierra superior a 3,5 mA. Según

8 • Capítulo 0 - Precauciones de seguridad ARTDriveL Manual de instrucciones
EN 50178, en estos casos, el cable de conexión a tierra (PE1) debe serde un tipo específico y duplicado para redundancia.
En caso de avería, si el inverter está inhibido, pero no desconectadode la red, no es posible excluir el movimiento accidental del eje delmotor.
En ningún caso abrir el equipo cuando esté conectado a la tensión dela red de alimentación. El tiempo mínimo de espera para podertrabajar en los bornes o dentro del equipo se indican en el apartado4.12.
Si se debe extraer la cubierta frontal para el funcionamiento contemperaturas ambientales superiores a 40° el usuario deberácomprobar mediante las oportunas precauciones, que no se produzcaalgún contacto accidental con componentes bajo tensión.
No conectar tensiones de alimentación que superen el límite detensiones admisibles. Si se aplican tensiones excesivas al inverter,resultarán dañados componentes internos del mismo.
No está permitido el funcionamiento de inverter sin conectar la puestatierra. Para evitar perturbaciones, la carcasa del motor debe ponersea tierra a través de un conector de tierra separado de los conectoresde tierra de los otros equipos.
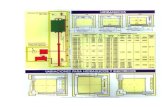
Alimentación de Red y Puesta a TierraEn caso de una alimentación trifásica descompensada respecto atierra, una pérdida de aislamiento de cualquiera de los elementosconectados a la misma red puede causar problemas funcionales alregulador, si no se utiliza un transformador estrella/triángulo.1- Los reguladores GEFRAN-SIEI están diseñados para ser
alimentados de redes trifásicas estandard que sea simétricasrespecto a tierra (redes TN o TT)
2- En caso de alimentación con redes IT, asimétricas respecto atierra, es obligatorio el uso de un transformador triángulo/estrella,con el secundario referido a tierra.
Ruego observen el siguiente ejemplo de conexión.
Safetyground
L1
L2
L3
Earth
U1/L
1
V1/L
2
W1/L
3
U2/T
1
V2/T
2
W2/T
3
PE
2/
All wires (including motor ground) mustbe connected inside the motor terminal box
AC
OU
TP
UT
CH
OK
E
AC
Ma
inS
up
ply
AC
INP
UT
CH
OK
E
PE
1/

ARTDriveL Manual de instrucciones Capítulo 0 - Precauciones de seguridad • 9
La conexión de puesta a tierra debe dimensionarse conforme a lasnormativas eléctricas nacionales. El cable principal debe fijarseutilizando la pinza indicada por el fabricante del cable principal.
No realizar la prueba de aislamiento entre los terminales del invertero los del circuito de control.
No instalar el inverter en ambientes en que la temperatura rebase laadmitida por las especificaciones. La temperatura ambiente tiene ungran efecto en la vida y fiabilidad del inverter. Dejar la tapa fijadapara temperaturas de 40°C.
Si la señalización de las alarmas del inverter está activa, consulte lasección Localización de errores de este manual de instrucciones ydespués de solucionar el problema, reanude la operación. No ajustela alarma a cero automáticamente a través de una secuencia externa,etc.No olvidar extraer el (los) paquete(s) de desecante durante eldesembalaje del producto (si no se retiran estos paquetes, podrían ira parar a los agujeros de aireación u obstruir las aperturas derefrigeración, provocando un recalentamiento del inverter).
El inverter debe montarse en una pared construida con materialestermorresistentes. Durante el funcionamiento, la temperatura de lasaletas de refrigeración puede alcanzar los 90°C.
Manejar el equipo sin tocar ni dañar ninguna de sus partes. No estápermitido variar la distancia de aislamiento o retirar materialesaislantes y cubiertas.
Proteger el equipo contra solicitaciones no admisibles (temperatura,humedad, golpes, etc.).
No puede producirse tensión a la salida del inverter (bornes U2, V2,W2). No está permitido insertar en paralelo a la salida más invertersy no está permitido conectar directamente la entrada con la salidadel inverter (bypass).
No está permitido conectar a la salida el inverter (bornes U2, V2,W2) ninguna carga capacitiva (por ejemplo, condensadores decorrección de factor de potencia).
La puesta en servicio eléctrica debe realizarla personal cualificado.Este personal es responsable de que exista una conexión adecuadade tierra y una protección de los cables de alimentación conforme alas prescripciones locales y nacionales. El motor debe estar protegidocontra sobrecargas.

10 • Capítulo 0 - Precauciones de seguridad ARTDriveL Manual de instrucciones
No deben realizarse ensayos de rigidez dieléctrica en partes delinverter. Para medir tensiones de las señales, deben emplearseinstrumentos de medida adecuados (resistencia interna mínima 10kΩΩΩΩΩ/V).
¡NOTA! En caso de almacenamiento de los inverters durante más de 2 años, se hade tener presente que los condensadores del circuito intermedio mantienencon seguridad sus características originales si se alimentan antes de 2años a partir de la fecha de suministro. Antes de poner en servicio losequipos que hayan permanecido durante mucho tiempo en el almacén, serecomienda alimentar los inverters al menos durante dos horas pararecuperar las características originales de los condensadores: Para tal fin,aplicar la tensión de entrada sin validar el inverter (Disable).
¡NOTA! Los términos “Inverter” , “Drive” y “accionamiento”, con frecuencia, seemplean con idéntico significado en la industria. En este documento seempleará el término “inverter”.

ARTDriveL Manual de instrucciones Capítulo 1 – Funciones y características generales • 11
Capítulo 1 – Funciones y características generales
1.1 Drive
El ARTDriveL es un drive vectorial con orientación de campo con excelentespropiedades de control de velocidad y un alto par dedicado a la industriade ascensores y, en general, a las aplicaciones de montacargas. Se puedeaplicar a ambos sistemas con y sin engranajes.Los modos de control disponibles según el firmware instalado son:
AVy ... AC / AVy ... AC4 : Firmware de motor asíncrono
Control - Control vectorial con orientación de campoModos - Control vectorial sin sensor
- Control avanzado V/f
AVy ... BR / AVy ... BR4 : Firmware de motor síncronoControl
Modos - Control sin escobillas
Caracterísiticas especiales• Secuencia del ascensor
Secuencia típica de señales de entrada/salida utilizada en la aplicaciónde ascensores, el frenado, el contactor de salida y el control de la puerta
• Parámetros en unidades linealesEs posible seleccionar diferentes unidades de ingeniería para parámetrosprincipales que determinan el movimiento, rpm para la velocidad yrpm/s, rmp/s2 para la aceleración relacionada con el motor o mm/s parala velocidad, mm/s2, mm/s3 para la aceleración relacionada con la cabina.
• Parámetros mecánicos del ascensorParámetros del sistema mecánico como el diámetro del sistema de poleas(Pulley) y la relación de desmultiplicación (Gearbox) para latransformación entre los sistemas de unidad y los pesos del sistemapara el cálculo de inercias y la afinación del regulador de velocidad lainercia para la respuesta deseada.
• Generación de la rampaDos rampas S independientes seleccionables a través de entrada digitalcon 4 ajustes de sacudida independientes. Rampa de deceleraciónespecial correspondiente a la orden de parada.
• Multi-velocidad8 valores de referencia de velocidad predefinidos. En el arranque, hayla posibilidad de sobrescribir con valores adicionales para conseguirun arranque suave.
• Pre-parInicialización del regulador de velocidad desde el sensor de peso paraevitar curvaturas o elevaciones en el arranque.
• Control de aterrizajeControl de precisión de la posición de la cabina en la zona del suelo através del regulador de posición interna.
• Sobrecarga superiorCapacidad de sobrecarga correspondiente a los ciclos de carga típicosutilizados en aplicaciones de ascensores.

12 • Capítulo 1 – Funciones y características generales ARTDriveL Manual de instrucciones
• Función lógica del control del ventilador (Sólo para tamaños deAVy2040AC4 / BR4 hasta AVy5550AC4 / BR4)La función lógica del control del ventilador permite hacer funcionarventiladores de inversión interna sólo cuando el drive está activado.La señal de la función lógica del control del ventilador también serepite en los terminales FEXT de la placa de alimentación del drive,para un ventilador externo auxiliar.
• Proveedor del módulo de emergenciaEl control del proveedor del módulo de emergencia (EMS o MW22U)permite maniobras de elevación de emergencia (se requiere un paquetede baterías auxiliar). Ambos dispositivos deben estar conectados a laseñal mediante un interface con el terminal EM de la placa dealimentación del drive. Para las especificaciones técnicas, consulte elmanual del usuario de EMS o MW22U.
• Menú fácil de usarLos menús con la terminología de ascensores están separados paralos ajustes MONITORing, motor STARTUP y TRAVEL.
Caracterísiticas del drive
• El procedimiento de auto sintonización para los reguladores decorriente, flujo y velocidad
• La modulación del vector del espacio mantiene el nivel de ruido almínimo.
• Cambio de frecuencias seleccionable 2, 4, 8, 12, 16 kHz.• Voltaje de salida hasta el 98% del voltaje de entrada• El registro de fallos guarda las últimas 30 alarmas de fallo con la
duración asociada.• Protección contra sobrecargas para la unidad del drive, motor y
frenado.• Tres entradas analógicas totalmente configurables en el dispositivo
estándar.• Expansión de las salidas analógicas/digitales y las entradas analógicas/
digitales a través de tarjetas opcionales (EXP D8R4, EXP D14A4F).• Es posible la regulación de par y velocidad.• Gestión de muchos tipos distintos de dispositivos de realimentación
de velocidad (encoder).• Regulación de velocidad adaptable.• Alarmas relacionadas con la velocidad.
El drive puede funcionar simplemente a través de- la placa del terminal- el teclado fácil de utilizar- el programa del PC incluido y el interface serie RS485- una conexión fieldbus (opcional): INTERBUS-S, PROFIBUS-DP,
GENIUS, CANopen o DeviceNet.Los Drives se instalan con IGBTs (transistores bipolares de compuerta aislada).La salida está protegida contra fallos de derivación a masa y cortocircuitosde salida fase a fase.Fuente de alimentación del regulador a través de la unidad de la fuente dealimentación del modo conmutado desde el circuito del bus CC. Fuente dealimentación suplementaria en el caso de caídas de tensión breves.Aislamiento galvánico entre la sección de control y los terminales de control.Entradas analógicas diseñadas como entradas diferenciales.

ARTDriveL Manual de instrucciones Capítulo 1 – Funciones y características generales • 13
1.2 Motores y encoders
Los Drives AVy están diseñados para la regulación con orientación de campode los motores estándar de CA de inducción de tres fases. Se puede utilizarun encoder sinusoidal o un encoder digital para la realimentación enproporción a la velocidad. La información eléctrica y mecánica de los motoresestándar de tres fases se refiere a un intervalo de funcionamiento en particular.Cuando estos motores estén conectados a un drive de CA, se deberían teneren cuenta los siguientes puntos:
¿Es posible utilizar motores de inducción estándar?Con los Drives Avy es posible utilizar motores de inducción estándar. Algunascaracterísticas del motor tienen una gran influencia en las prestacionesconseguidas. Hay que tener en cuenta también lo que se indica en la sección2.3.2, “Salida de CA”, acerca de los voltajes y la potencia del motor.
¿Qué propiedades de los motores asíncronos tienen un resultadodesfavorable al funcionar con convertidores de frecuencia?No se deberían utilizar los motores con rotores de jaula de ardilla doble ocon barras de rotor profundas.
¿Montaje en estrella o en triángulo?Los motores se pueden conectar tanto en montajes en estrella como enmontajes en triángulo. La experiencia ha demostrado que los motoresmontados en estrella tienen mejores propiedades de control, por lo tantoson preferibles los montajes en estrella.
RefrigeraciónLa refrigeración de los motores de tres fases normalmente se lleva a cabopor medio de un ventilador que se monta en el eje del motor. Hay querecordar que el flujo de aire producido por el ventilador se reduce cuandoel motor funciona a una velocidad inferior, que en algunos casos puedesignificar que no es suficiente refrigeración para el motor. Se tiene queconsultar al fabricante del motor si es necesario un ventilador externo y lagama de velocidades del motor en la aplicación particular.
Funcionamiento que supera la velocidad nominalDebido a los factores mecánicos implicados (rodamientos, desequilibriodel rotor) y al aumento de las perdidas de material, consulte al fabricantedel motor si está funcionando por encima de la velocidad nominal.
¿Qué información del motor se precisa para conectar el convertidor defrecuencia?Especificaciones de la placa de características del motor
Motor de inducción asíncrona- Voltaje nominal - Potencia nominal- Frecuencia nominal - Cosphi- Intensidad nominal - Eficacia- Velocidad nominal

14 • Capítulo 1 – Funciones y características generales ARTDriveL Manual de instrucciones
Motor síncrono sin escobillas- Voltaje nominal - Constante del par- Intensidad nominal - Constante EMF- Velocidad nominal - Resistencia estátor- Pares del polo - Inductancia Ls S
Protección del motorTermistoresLos termistores PTC según DIN 44081 ó 44082 del motor se puedenconectar directamente al convertidor de frecuencia a través de los terminales78 y 79. En este caso, se tiene que eliminar la resistencia (1Kohm) montadaentre los terminales 78 y 79.
Contactos que dependen de la temperatura en el devanado del motorLos contactos que dependen de la temperatura del tipo “Klixon” puedendesconectar el drive a través del control externo o se puede informar deellos como un fallo externo en el convertidor de frecuencia (terminal 15).También se pueden conectar a los terminales 78 y 79 para obtener unaseñal de error específica. En este caso hay que conectar la resistencia de 1Kohm existente en serie al cableado, fíjese que uno de sus lados debe estarconectado directamente al terminal 79.
¡NOTA! El circuito del interface PTC del motor (o klixon) se tiene que considerary tratar como un circuito de señal. Los cables de conexión que van al PTCdel motor deben estar hechos de pares trenzados con una protección, elitinerario del cable no debería ser paralelo al cable del motor o estar alejadopor lo menos 20 cm.
Límite de intensidad del convertidor de frecuenciaEl límite de intensidad puede proteger el motor de sobrecargas no permitidas.Por esta razón el límite de intensidad y la función de control de la sobrecargadel motor del Drive (“Protección del motor”) se debe configurar de modoque la corriente se mantenga en el intervalo permitido para el respectivomotor.
¡NOTA! Hay que recordar que el límite de intensidad puede controlar unsobrecalentamiento del motor sólo si es consecuencia de una sobrecarga,no a causa de una insuficiente ventilación. Cuando el drive funciona avelocidades inferiores, se recomienda el uso adicional de resistencias PTCo contactos dependientes de la temperatura en el cableado del motor, a noser que se disponga de una ventilación forzada independiente.
Difusores de salidaAl utilizar motores estándares de propósito general, en algunos casos serecomiendan difusores de salida para proteger el aislamiento del cableado.Consulte la sección 4.8.2, “ Difusores de salida”.

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 15
Capítulo 2 – Procedimientos de inspección, identificación decomponentes y especificaciones estándar
2.1 Acerca de los procedimientos de inspección de reparto
2.1.1 General
Hay que prestar un alto grado de atención al empaquetar los drivesARTDriveL y prepararlos para su entrega. Sólo se deberían transportarcon medios de transporte adecuados (consulte la información del peso).Observe las instrucciones impresas en el embalaje. También se aplica cuandoel dispositivo está desempaquetado e instalado en el armario de control.
Con respecto al reparto, compruebe lo siguiente:• si el embalaje presenta cualquier daño externo• si el albarán coincide con el pedido.Abra el embalaje con las herramientas adecuadas. Compruebe que:• no se ha dañado ninguna parte durante el transporte• el tipo de dispositivo corresponde con su pedido
En el caso de que haya daños en el paquete o se haya recibido un repartoincorrecto o incompleto, notifíquelo inmediatamente a las oficinas de ventasresponsables.Los dispositivos sólo se deben guardar en espacios secos dentro de losintervalos de temperatura especificados.
¡NOTA! Se permite un cierto grado de condensación si se presenta es consecuenciade cambios de temperatura (consulte la sección 2.3.1, “Condicionesambientales aceptables”). De lo contrario, sin embargo, se aplica cuandolos dispositivos están en funcionamiento. ¡Compruebe siempre que no hayacondensación en los dispositivos conectados a la fuente de alimentación!
2.1.2 Designación del tipo del convertidor
La especificación técnica del Drive AVy se indica en el código de tipo.Ejemplo:
AVy2040-XXX-AC4
ARTDrive, drive de vector de flujo de CA, tensión de entrada de 3 fasesIdentificación de las dimensiones de la cajaSalida nominal del motor = 4kWX = módulo del led KCS, K=teclado KBS programableX = sin transistor de frenado interno, B=con transistor de frenado internoX = software estándar, L=software LIFT (específico para el control del ascensor)AC=Firmware para motores de inducción asíncrona, BR=Firmware para
motores síncronos sin escobillas4 = Hardware Lift para el control lógico del ventilador interno/externo y control del proveedor
del módulo de emergencia (sólo tamaños AVy2040 ... AVy5550), [en blanco]=Hardwareestándar

16 • Capítulo 2 - Procedimientos de inspección ... especificaciones estándar ARTDriveL Manual deinstrucciones
2.1.3 Placa de carcaterísticas
Compruebe que toda la información indicada en la placa del constructoradjunta al convertidor corresponde al pedido.
Figura 2.1.3.1: Placa de identificación
Type : AVy 3150 -KBL AC4 S/N 02006233
Inp: 230-480 Vac (Fctry Set=400) 50/60Hz 3Ph Zmin=1%
28,2A@400Vac 24,5A@480Vac With line choke
Out : 0-400Vac 0-500Hz 3Ph 20HP @ 460Vac/15kW@400Vac
33A@400V Cont. Serv. 26,9A @480V
LISTED
INDUSTRIAL CONTROL EQUIPMENT
31KF
Type: Modelo de convertidorS/N: Número de serieInp: Voltaje de la fuente de alimentación, frecuencia y corriente
de entrada de CAOut: Voltaje de salida, frecuencia de salida, potencia e intensidad
de salida
Figura 2.1.3.2: Placa de características del Firmware & Nivel de revisión de la placa
Firmware HW release S/N 0162330 Prod.
Release D F P R S BU SW. CFG CONF
1.000 0.A 0.A 0.A 1.000 D1
Figura 2.1.3.3: Posición de la placa de características

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 17
2.2 Identificación de componentes
Un ARTDriveL convierte el voltaje y la frecuencia constante de una fuentede alimentación de tres fases en corriente continua y luego convierte estacorriente continua en una nueva fuente de alimentación de tres fases conun voltaje y una frecuencia variables. Esta fuente de alimentación variablede tres fases se puede utilizar para ajustar de forma totalmente variable lavelocidad de los motores asíncronos y síncronos de tres fases.
Figura 2.2.1: Configuración básica del convertidor de frecuencia
1 2
3 4 5
6
7 8
1 Voltaje de alimentación de entrada de CA2 Difusor de la red de CA
Consulte la sección 4.8.1.3 Puente rectificador de tres fases
Convierte la corriente alterna en corriente continua utilizando un puentede tres fases de onda completa.
4 Circuito intermedio de CCCon resistencia de carga y condensador de suavizado.Voltaje directo (UDC ) = √2 x voltaje de la red (ULN ).
5 Convertidor IGBTConvierte la corriente continua en un corriente alterna de voltaje variablede tres fases con frecuencia variable.
6 Sección de control configurableMódulos para el control de bucles abiertos y bucles cerrados de lasección de la potencia. Se utiliza para procesar comandos de control,valores de referencia y valores reales.
7 Voltaje de salidaVoltaje alterno de tres fases.
8 Encoder para la retroalimentación de la velocidad(consulte la sección 3.4.2).

18 • Capítulo 2 - Procedimientos de inspección ... especificaciones estándar ARTDriveL Manual deinstrucciones
2.3 Especificaciones estándar
2.3.1 Especificaciones ambientales
ENTORNO
Temperatura ambiental TA [°C] __ 0 … +40; +40…+50 con deratingTemperatura ambiente TA [°F] ___ 32 … +104; +104…+122 con deratingUbicación de la instalación _____ Grado 2 de contaminación o mejor (libre de la luz del sol directa,
vibración, polvo, gases corrosivos o inflamables, niebla, aceitede vapor y gotas de agua, evitar ambientes salinos)
Grado de protección __________ IP20IP54 para el armario con radiador montado en el exterior (tipode tamaño de 1007 a 3150)
Altitud de la instalación _______ Hasta 1.000 m (3.280 pies) por encima del nivel del mar, paraaltitudes superiores se aplica una reducción actual de 1,2% porcada 100 m (328 pies) de altura adicional.
Temperatura: funcionamiento 1) ___________________ 0…40°C (32°…104°F) funcionamiento 2) ___________________ 0…50°C (32°…122°F) almacenamiento ___________ -25…+55°C (-13…+131°F), clase 1K4 como para EN50178
-20…+55°C (-4…+131°F), para dispositivos con teclado transporte ________________ -25…+70°C (-13…+158°F), clase 2K3 como para EN50178
-20…+60°C (-4…+140°F), para dispositivos con tecladoHumedad del aire: funcionamiento ____________ de 5 % a 85 %, de 1 g/m3 a 25 g/m3 sin condensación o hielo
(Clase 3K3 como para EN50178) almacenamiento ___________ de 5% a 95 %, de 1 g/m3 a 29 g/m3 (Clase 1K3 como para
EN50178) transporte ________________ 95 % 3), 60 g/m3 4)
Presión del aire: funcionamiento ____________ [kPa] de 86 a 106 (clase 3K3 como para EN50178) almacenamiento ___________ [kPa] de 86 a 106 (clase 1K3 como para EN50178) transporte ________________ [kPa] de 70 a 106 (clase 2K3 como para EN50178)
NORMATIVAS
Condiciones climáticas ________ IEC 68-2 Parte 2 y 3Despeje y fluencia ____________ EN 50178, UL508C, UL840 grado 2 de contaminaciónVibración ___________________ IEC68-2 Parte 6Conpatibilidad EMC ___________ EN61800-3:2004 (consulte el libro de instrucciones “Guide
to the Electromagnetic compatibility”)Acuerdos __________________ CE, UL, cUL
1) Parámetro de temperatura ambiente = 40°C (104°)Temp. Ambiente = 0 ... 40°C (32°...104°F)Más de 40°C: - reducción del 2% de la intensidad de la intensidad de salida nominal por K
- extraiga la placa frontal (mejor que la clase 3K3 como para EN50178)2) Parámetro de temperatura ambiente = 50°C (122ºF)
Temp. Ambiente = 0 ... 50°C (32°...122°F)Intensidad ajustada a 0.8 de la intensidad de salida nominalMás de 40°C (104º): extracción de la cubierta superior (mejor que la clase 3K3 como
para EN50178)3) La humedad de aire relativa mayor se produce con la temperatura @ 40°C (104°F) o
cuando la temperatura del dispositivo cambia de repente de -25 ...+30°C (-13°...+86°F).4) La humedad del aire absoluta mayor se produce cuando el dispositivo cambia de repente
de 70°...15°C (158°...59°F).

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 19
Eliminación del dispositivo
El Drive AVy se puede desechar como equipo electrónico de acuerdo conlas normas nacionales actualmente válidas para la eliminación de residuosde componentes electrónicos.Las cubiertas de plástico de los Drives (hasta el tamaño 3150) sonreciclables: el material utilizado es >ABS+PC< .
2.3.2 Conexión de Entrada/Salida de CA
El Drive AVy se debe conectar a una fuente de CA capaz de suministraruna intensidad de cortocircuito simétrica (a 480V +10% Vmax) inferior oigual a los valores indicados en la siguiente tabla. Para utilizar un difusorde entrada de CA consulte el capítulo 4.8.1.No se requiere ninguna conexión externa de la fuente de alimentación delregulador con la fuente de entrada de CA existente aunque la fuente dealimentación se tome del circuito DC Link. Cuando se comprueben, ajusteel parámetro del voltaje de red al valor del voltaje de entrada de CAadecuado. De esta forma, automáticamente se ajusta el umbral para la alarmade bajo voltaje al nivel adecuado.
¡NOTA! En algunos casos son necesarios en el lado de la entrada la inductancia dered y filtros eventuales EMI. Consulte las indicaciones del capítulo“Inductancias / Filtros”.
Los Drives de frecuencia ajustables y los filtros de entrada de CA tienenintensidades de descarga a tierra superiores a 3.5 mA. EN 50178 especificaque con intensidades de descarga superiores a 3.5 mA, la conexión a tierradel conductor protector (PE1) debe ser de tipo fijo.
2.3.3 Intensidad del lado red
La intensidad de red del inverter depende del estado de funcionamientodel motor conectado, así como del uso de la inductancia de entrada. Latabla 3.3.2.1 muestra los valores correspondientes al servicio continuonominal (IEC 146 clase 1), teniendo en cuenta el factor de potencia desalida típico para cada tamaño
2.3.4 Salida
La salida del Drive AVy está protegida contra defectos de conexión a tierray contra cortocircuitos fase a fase. La frecuencia de conmutación esconstante en el intervalo de velocidad y depende del tamaño del drive.¡No está permitida la conexión de un voltaje externo a los terminales desalida del Drive!
¡NOTA! Cuando el inverter está en funcionamiento, se permite desacoplar elmotor de la salida del aparato, mediante un contactor, después dedesactivarlo.

20 • Capítulo 2 - Procedimientos de inspección ... especificaciones estándar ARTDriveL Manual deinstrucciones
El valor para el índice continuo de corriente de salida ( ICONT ) depende delvoltaje de salida de CA ( KV ), la temperatura ambiente ( KT ) y la frecuenciade conmutación ( KF ), los valores del factor derating son los que aparecenlistados en la tabla 2.3.4.1:ICONT = I2N x KV x KT x KF
Los deratings aplicables se ajustan automáticamente cuando se seleccionanlos valores apropiados de voltaje de entrada de CA, de temperaturaambiente y de la frecuencia de conmutación.
Figura 2.3.4.1: Índice del Drive en funciones de cambio de frecuencia
2kHz 4kHz 8kHz 12kHz 16kHz
100%
70%
85%
105%
110%
Rated drive current@400V
[%]
0.75-37kW
45-160kW
Over-rating only on 2.2, 4, 5.5, 18.5kW
Switching frequency[kHz]
Default Higher
La tabla 2.3.4.2 muestra los valores de corriente de sobrecarga para losperfiles típicos de servicio (Temperatura ambiente =40°C [104°F],frecuencia de conmutación estándar).Después del ciclo de sobrecarga, la intensidad de salida se reduce aintensidad de salida nominal por medio del control del drive. Para permitirel siguiente ciclo de sobrecarga, la salida debe reducirse (reduciendo alcarga) a un valor inferior al nominal. La tabla indica el tiempo derecuperación de sobrecarga (pausa) con la intensidad reducida al 90% dela corriente continua.La coordinación de las potencias nominales del motor con el tipo Drivepresentado en la siguiente tabla se refiere al uso de motores de 4 polosestándar con un voltaje nominal igual al voltaje nominal de la fuente dealimentación de entrada. Igual que para los motores con voltajes diferentes,el tipo de Drive que hay que utilizar viene determinado por la corrientenominal del motor.La corriente nominal del motor no puede ser inferior a 0,3 x I2N . Laintensidad de imantación del motor no debe ser superior a ICONT.

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 21
Tabla 2.3.4.1: Datos técnicos en entrada y salida
4220
4300
4370
4221
4301
4371
Inve
rter
Out
put(
IEC
146
clas
s1),
Con
tinu
ous
serv
ice
[kV
A]
1.6
2.7
3.8
56.
58.
512
16.8
22.4
26.5
3242
5564
7998
128
145
173
224
PN
mot
(rec
omm
ende
dm
otor
outp
ut):
@U
LN
=23
0Vac
;fSW
=de
faul
t;IE
C14
6cl
ass
1[k
W]
0.37
0.75
1.1
1.5
2.2
34
5.5
7.5
911
18.5
2222
3037
5555
7590
@U
LN
=40
0Vac
;fSW
=de
faul
t;IE
C14
6cl
ass
1[k
W]
0.75
1.5
2.2
34
5.5
7.5
1115
18.5
2230
3745
5575
9011
013
216
0@
UL
N=
460V
ac;I
EC
146
clas
s1
[Hp]
12
33
57.
510
1520
2330
4050
6075
100
125
150
150
200
U2
Max
outp
utvo
ltag
e[V
]
f 2M
axou
tput
freq
uenc
y(*
)[H
z]
I 2N
Rat
edou
tput
curr
ent:
@U
LN
=23
0-40
0Vac
;fSW
=de
faul
t;IE
C14
6cl
ass
1[A
]2.
44
5.6
7.5
9.6
12.6
17.7
24.8
3339
4763
7993
114
142
185
210
250
324
@U
LN
=46
0Vac
;fSW
=de
faul
t;IE
C14
6cl
ass
1[A
]2.
13.
54.
96.
58.
311
15.4
21.6
28.7
3440
5468
8199
124
160
183
217
282
f SW
swit
chin
gfr
eque
ncy
(Def
ault
)[k
Hz]
f SW
swit
chin
gfr
eque
ncy
(Hig
her)
[kH
z]--
Der
atin
gfa
ctor
:K
Vat
460/
480V
ac0.
960.
870.
930.
90K
Tfo
ram
bien
ttem
pera
ture
KF
for
swit
chin
gfr
eque
ncy
UL
NA
CIn
putv
olta
ge[V
]
AC
Inpu
tfre
quen
cy[H
z]
I NA
CIn
putc
urre
ntfo
rco
ntin
uous
serv
ice
:-C
onne
ctio
nw
ith
3-ph
ase
reac
tor
@23
0Vac
;IE
C14
6cl
ass1
[A]
1.7
2.9
45.
57
9.5
1418
.225
32.5
3955
6984
9812
215
819
222
0n.
a.@
400V
ac;I
EC
146
clas
s1[A
]1.
93.
34.
56.
27.
910
.715
.820
.428
.236
.744
6277
9411
013
717
721
624
730
9@
460V
ac;I
EC
146
clas
s1[A
]1.
72.
93.
95.
46.
79.
313
.817
.824
.532
.537
5366
8296
120
153
188
214
268
-Con
nect
ion
wit
hout
3-ph
ase
reac
tor @
230V
ac;I
EC
146
clas
s1[A
]3.
64.
46.
87.
911
15.5
21.5
27.9
35.4
@40
0Vac
;IE
C14
6cl
ass1
[A]
3.9
4.8
7.4
912
16.9
24.2
30.3
40@
460V
ac;I
EC
146
clas
s1[A
]3.
44.
26.
47.
810
.414
.721
26.4
34.8
Max
shor
tcir
cuit
pow
erw
itho
utlin
ere
acto
r(Z
min
=1%
)[k
VA
]16
027
038
050
065
085
012
0017
0022
5027
0032
0042
0055
0064
0079
0098
0012
800
1450
017
300
2240
0[V
]
[V]
(*)
Max
outp
utfr
eque
ncy
refe
rto
regu
lati
onin
fiel
dor
ient
edm
ode.
See
tabl
eat
chap
ter
3.3.
6fo
rot
her
deta
ilsTA
DL
2010
For
AV
y…A
C4
and
AV
y…B
R4
seri
eson
lyth
em
odel
son
grey
fiel
dar
eav
aila
ble.
7900
71100
71320
81600
4185
5450
5550
6750
2055
2075
3110
3150
1015
1022
1030
2040
0.87
84
0.98
xU
LN
(AC
Inpu
tvol
tage
)
400 8
200
0.87
Typ
e1007
12/1
6
Bra
king
IGB
TU
nit(
stan
dard
driv
e)
O U T P U T I N P U T
Ove
rvol
tage
thre
shol
d
Und
ervo
ltag
eth
resh
old
230
V-1
5%...
480
V+
10%
,3P
h
230
VD
C(f
or23
0V
AC
mai
ns),
400
VD
C(f
or40
0VA
Cm
ains
),46
0V
DC
for
460
VA
Cm
ains
)O
ptio
nin
tern
al(w
ith
exte
rnal
resi
stor
);B
raki
ngto
rque
150%
0.8
@50
°C(1
22°F
)
For
thes
ety
pes
anex
tern
alin
duct
ance
isre
com
men
ded
Ext
erna
lbra
king
unit
(opt
iona
l)
50/6
0H
z±
5%
820
VD
C
Stan
dard
inte
rnal
(wit
hex
tern
alre
sist
or);
Bra
king
torq
ue15
0%
0.7
for
f SW
=16
,0.
85fo
rf S
W=
120.
7fo
rf S
Whi
gher
then
defa
ult

22 • Capítulo 2 - Procedimientos de inspección ... especificaciones estándar ARTDriveL Manual deinstrucciones
Tabla 2.3.4.2-A: Capacidad de sobrecarga (Tamaños 1007 ... 4370)
Corrientecontinua@400V
Factor desobrecarga
T1Tiempo desobrecarga
Intensidad desobrecarga
T2 Tiempode pausa desobrecarga
@90% Cont
curr
T3 Tiempode pausa desobrecarga@ 0% Cont
curr
LOW Factorde
sobrecargapor
frecuencia< 3Hz
LOWTiempo desobrecarga
porfrecuencia
<3Hz[A] [sec] [A] [sec] [sec] [sec]
1007 2.4 4.41015 4 7.31022 5.6 10.21030 7.5 13.72040 9.6 17.62055 12.6 23.12075 17.7 32.43110 24.8 45.43150 33 60.44185 39 71.44221 47 86.04301 63 115.34371 79 144.6
TL2020
Modelo
1.83 2
1.5
1.36
10 124 24
OvldCurrentLevel
Overload Level [%]
Time [sec]
T1
T2
OvldCurrentLevel
Overload Level [%]
Time [sec]T3
CYCLE A
100%ContinuousCurrentLevel
90%ContinuousCurrentLevel
(1)
(2)
CYCLE B
(3)
(4)
T1
100%ContinuousCurrentLevel
(1) La intensidad de carga debe reducirse a un nivel del 90% para permitir el siguiente ciclo de carga.(2) La intensidad del Drive se limita al nivel del 100% cuando seha seleccionado la alarma de sobrecarga como Ignore o Warning(3) Sin límite en la duración de este intervalo de tiempo @100% Cont current(4) Se permite el siguiente ciclo de carga después de T3

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 23
Tabla 2.3.4.2-B: Capacidad de sobrecarga (Tamaños 5450... 81600)
Corriente
continua
@400V
SLOW
Factor de
sobrecarga
T1 SLOW
Tiempo de
sobrecarga
SLOW
Intensidad de
sobrecarga
T2 SLOW
Tiempo de
pausa de
sobrecarga
@90% Cont
curr
FAST Factor
de
sobrecarga
TF FAST
Tiempo de
sobrecarga
[sec]
FAST
Intensidad
de
sobrecarga
LOW
Factor de
sobrecarga
por
frecuencia
< 3Hz
LOW
Tiempo de
sobrecarga
por
frecuencia
< 3Hz[A] [sec] [A] [sec] [sec] [A] [sec]
5450 93 126.5 170.25550 114 155 208.66750 142 193.1 259.97900 185 251.6 338.671100 210 285.6 384.371320 250 340 457.581600 324 440.6 1.4 1.0 592.9
TL2021
21.36
Modelo
0.51.36 60 300
1.83
FastOvldCurrentLevel
SlowOvldCurrentLevel
100%ContinuousCurrentLevel
90%ContinuousCurrentLevel
Overload Level [%]
Time [sec]
TF
T1
T2
Load current must be reduced to 90% level
to allow next overload cycle
Drive current is limited to 100% level
when drive overload alarm is selected
as Ignore or Warning

24 • Capítulo 2 - Procedimientos de inspección ... especificaciones estándar ARTDriveL Manual deinstrucciones
2.3.5 E/S y especificaciones del encoderE/SHabilitar entradas _____________ 0 / 15...30 V 3.2...6.4 mA (5 mA @ 24 V)Entradas analógicas ___________ Seleccionable 0... ± 10 V 0,25mA máx.
0...20 mA 10V máx.4...20 mA 10 V máx.Voltaje máximo del modo común: 0...± 10 V
Salidas analógicas ____________ 0...± 10 V 5 mA máx. por salidaEntradas digitales _____________ 0 / 15...30 V 3.2...6.4 mA (5 mA @ 24 V)
Salidas digitales ______________ Alimentación + 15...35 VSeñales + 15...35 V 40 mA máx. por salida
Alimentación interna de voltajeCapacidad de carga ___________ + 5 V, 160 mA Conector
+10 V, 10 mA Terminal 7-10 V, 10 mA Terminal 8+24 V, 120 mA Terminal 19
Tolerancia __________________ +10 V ± 3 % 1)
-10 V ± 3 % 1)
+24 V + 20 ... 30 V, sin estabilizarXE para el encoder digital, PIN 7/9
1)La tolerancia entre la amplitud positiva y negativa es ± 0.5%
2.3.6 Precisión
Tabla 2.3.6.1: Frecuencia de salida máxima/mínima
(a): 1.5 * Capacidad nominal de par motor
Modo de regulaciónMáxima
Frecuencia de Switching (kHz)
Mínima (a)
44444
200
200
300
200
88888
400
200
600
400
1616161616
400
200
600
400
Con orientación de campo
Vector sin sensor
Control V/fSin escobillas
Resolución
22222
200
200
200
200
0.005
Frecuencia de salida (Hz)
0
0.62* frecuencia de deslizamiento
del motor
0

ARTDriveL Manual de instrucciones Capítulo 2 - Procedimientos de inspección ... especificaciones estándar • 25
Tabla 2.3.6.2: Referencia de velocidad / Resolución de realimentación y Límitesmáximos
Tabla 2.3.6.3: Anchura de banda del regulador de velocidad(b): Motor de 4 polos
(c): 1500 rpm estándar
Modo deregulación
Velocidadlímite (rpm)
0.031250.1250.250.5
1
Resolución de realimentación de velocidad (rpm)
Con orientación decampo
Vector sin sensor
Control V/f
Valor máximoFSS (rpm)
Resolución dereferencia de
velocidad (rpm)
0.031250.1250.250.5
1
0.031250.1250.250.5
1
Enc Sin Enc Dig Fmode Enc Dig Fpmode
Superior a[60000/(4096*ppr)
-SpdD ref res]
SpdD ref res
Valor máximo de (0.3 - SpdD ref res) (b)
N/A
512204840968192
16384512
204840968192
16384512
204840968192
16384
102440968192
1638432768
102440968192
1638432768102440968192
1638432768
Superior a[60000/(40*ppr)-
SpdD ref res]
Sin escobillas0.03125
0.1250.250.5
1
512204840968192
16384
102440968192
1638432768
Valor superior de[60000/
(4096*ppr)] oSpdD ref res
SpdD ref res
Valor superior de[60000/
(40*ppr)] oSpdD ref res
SinCos/Res.
2.5
N/A
N/A
Modo de regulación Precisión Typ Spd Reg (c) [%]
Anchura de banda máxima Spd reg (rad/sec)Campo SpdControl
Con orientación decampo
Vector sin sensor
Control V/F
100 (Spd>FSS/100)
N/A
>10000:1
>500:1
>100:1
450 100 300 (Spd>15rpmpor ppr=1024)
0.01
[email protected]@FSS/50
1%
100
Enc Sin Enc Dig Fmode Enc Dig Fpmode SinCos/Res.
Sin escobillas
N/A
>10000:1 0.01%
N/A
450 100 300 (Spd>15rpmpor ppr=1024)
Tabla 2.3.6.4: Especificaciones de par
Modo de regulación
Con orientación de campo
Vector sin sensor
Control V/f
ResoluciónTorque ref
>1:1000
>1:1000
N/A
Precisión TypTorque Reg (d)[%]
4
8
N/A
Campo Trq Control
>20:1
>20:1
N/A
Tiempo Typ TrqRise [ms]
0.8
0.8
N/A
(d): Mot rated torque=100%Spd range: Máx=Mot Rated speed; min=Mot Rated speed/10Torque range: Máx=Mot Rated torque; min=Mot Rated torque/10
Sin escobillas >1:1000 1 >20:1 0.8

26 • Capítulo 3 – Especificaciones mecánicas ARTDriveL Manual de instrucciones
Capítulo 3 – Especificaciones mecánicas
3.1 Dimensiones y métodos de montaje
Figura 3.1.1: Dimensiones del drive (Tamaños 1007 ... 3150)
c a
b
D1
D2
d
E2
E1
aD1
D2
E2
E1
Figura 3.1.2: Métodos de montaje (Tamaños 1007 ... 3150)
Mounting wall (D)Mounting with external dissipator (E)
E2 E4
E5
E3
E1
Ø d

ARTDriveL Manual de instrucciones Capítulo 3 – Especificaciones mecánicas • 27
Tabla 3.1.1: Dimensiones del drive y pesos (Tamaños 1007 ... 3150)
1007 1015 1022 1030 2040 2055 2075 3110 3150
a mm (inch)b mm (inch)c mm (inch)d mm (inch)
D1 mm (inch)D2 mm (inch)E1 mm (inch)E2 mm (inch)E3 mm (inch)E4 mm (inch)E5 mm (inch)Ø d
Weight kg (lbs) 3.5 (7.7) 3.6 (7.9)tadl3100
8.6 (19)3.7 (8.1) 4.95 (10.9)
M5
Type
306.5 (12.0)105.5 (4.1) 151.5 (5.9)
Drive dimensions:
310.5 (12.2)164 (6.5)
296.5 (11.6)
299.5 (11.7)69 (2.7)
315 (12.4)
208 (8.2)323 (12.7)240 (9.5)
168 (6.6)84 (3.3)
115 (4.5)
115 (4.5)
199.5 (7.8)
69 (2.7)62 (2.4)
9 (0.35)299.5 (11.8)
99.5 (3.9) 145.5 (5.7) 199 (7.8)284 (11.2)
Figura 3.1.3: Dimensiones del drive (Tamaños 4220 ... 81600)
caD1
b

28 • Capítulo 3 – Especificaciones mecánicas ARTDriveL Manual de instrucciones
Figura 3.1.4: Métodos de montaje (Tamaños 4220 ... 81600)
D1
D2 D2
D3 D3 D3 D3
D4
Mounting wall (D)
Tabla 3.1.2: Dimensiones del drive y pesos (Tamaños 4220 ... 81600)
4185-4221 4300-4301 4370-4371 5450 5550 6750 7900 71100 71320 81600
a mm (inch)
b mm (inch) 741 (29.2) 965 (38)c mm (inch) 268 (10.5) 442 (17.4)
D1 mm (inch)
D2 mm (inch)
D3 mm (inch)
D4 mm (inch) 725 (28.5) 947 (37.3)Ø
Weight kg 18 22 22.2 34 34 59 75.4 80.2 86.5 109lbs 39.6 48.5 48.9 74.9 74.9 130 166.1 176.7 190.6 240.3
tadl3105
Drive dimensions:
309 (12.1) 509 (20)
489 (19.2) 564 (22.2)
376 (14.7)
909 (35.8)
Type
M6
150 (5.9)
550 (21.6)
100 (3.9)
225 (8.8)
308 (12.1) 297.5 (11.7)
891 (35)475 (18.7)
Figura 3.1.5: Ubicación del teclado
Para permitir un ángulo de visión cómodo, el teclado se puede orientarhacia tres posiciones diferentes.

ARTDriveL Manual de instrucciones Capítulo 3 – Especificaciones mecánicas • 29
3.2 Perdida de Watts, disipación del calor, ventiladores internos yapertura mínima del armario sugerida para la refrigeración
La disipación del calor de los drives depende del estado de funcionamientodel motor conectado. La siguiente tabla muestra los valores que hacenreferencia a la frecuencia de conmutación por defecto del funcionamiento(consulte la sección 2.3.2, “Conexión de entrada/salida de CA”), Tamb ≤40°C,tipo de factor de potencia del motor y de corriente nominal continua.
Tabla 3.2.1: Disipación del calor y flujo de aire requerido
@ULN=400Vac1)
@ULN=460Vac1) Ventiladores internos Ventiladores del disipador
1007 48.2 45.0 11 -
1015 77.5 72.0 11 30
1022 104.0 96.3 11 30
1030 138.3 126.7 11 30
2040 179.5 164.1 11 2x30
2055 233.6 215.6 11 2x30
2075 327.4 300.8 11 2x30
3110 373 340 30 2x79
3150 512 468 30 2x79
4185 560 500 80
4220-4221 658 582 80
4300-4301 864 780 170
4370-4371 1100 1000 170
5450 1250 1100 3405550 1580 1390 3406750 1950 1750 6507900 2440 2200 975
71100 2850 2560 97571320 3400 3050 97581600 4400 3950 1820
tadl0040
Potencia disipada [W] Flujo de aire de los ventiladores [m3/h]
Modelo
1) fSW=default; I2=I2N
¡NOTA! Todos los drives tienen ventiladores internos.Las perdidas de disipación del calor hacen referencia a la frecuencia deconmutación por defecto.
Tabla 3.2.2: Abertura mínima del armario sugerida para la refrigeración
Sección de regulación Disipador
1007 ... 1030 31 (4.8) 36 (5.6)
2040 ... 2075 31 (4.8) 72 (11.1)
3110 ... 3150 36 (5.6) 128 (19.8)
4185 ... 4221 2x150 (2x 23.5) 2x150 (2x 23.5)
4300 ... 4371 2x200 (2x31) 2x200 (2x31)
5450 ... 5550 2x370 (2x57.35) 2x370 (2x57.35)
6750 ... 71320 2x620 (2x96.1) 2x620 (2x96.1)
81600 2 x 1600 (2 x 248) 2 x 1600 (2 x 248)
tadl0050
Abertura mínima del armario sugerida para la refrigeración [cm2] (sq.inch)
Modelo

30 • Capítulo 3 – Especificaciones mecánicas ARTDriveL Manual de instrucciones
3.2.1 Intensidad de la alimentación de los ventiladores
Función lógica del control del ventilador(sólo para tamaños de AVy2040AC4 / BR4 hasta AVy5550AC4 / BR4)Permite hacer funcionar los ventiladores internos sólo después de haberactivado el inverter. Los ventiladores se detendrán después de 300 seg dela desconexión del inverter y cuando la temperatura del radiador sea inferiora 60°C. La señal de la función también se repetirá en los terminales FEXTde la placa de potencia, para la conexión de un ventilador auxiliar externo.
Fuente de alimentación de los ventiladores para tamaños de AVy1007hasta AVy5550La fuente de alimentación (+24VAC) para estos ventiladores se proporcionadesde una unidad de la fuente de alimentación del drive interno.
Fuente de alimentación de los ventiladores para tamaños de AVy6750hasta AVy81600La fuente de alimentación para los ventiladores la conecta el usuario desdeel exterior. El voltaje de la fuente de alimentación para estos ventiladoreses externo y se debe conectar en el instalador de la placa de bornes:- AVy6750: 0,8A@115V/60Hz, 0,45A@230V / 50Hz- AVy7900 ... AVy71320: 1,2A@115V/60Hz, 0,65A@230V / 50Hz- AVy81600: 1,65A@115V/60Hz, 0,70A@230V / 50Hz
Figura 3.2.1: Conexiones de ventiladores del tipo UL en los tamaños AVy7900,AVy71100 y AVy71320
M
~
U3
2V3
1V3
0
115
230
AU
TOTR
AFO
230VAC fans
Drive
Figura 3.2.2: Conexiones de ventiladores del tipo UL en los tamaños AVy6750 yAVy81600
M
~
U3
2V3
1V3
No.2 115VAC fansM
~
Drive

ARTDriveL Manual de instrucciones Capítulo 3 – Especificaciones mecánicas • 31
Figura 3.2.3: Ejemplo para la conexión externa
U3
2V3
1V3
230VAC
U3
2V3
1V3
115VAC
Drive Drive
(*)
¡NOTA! Se proporciona un fusible interno (2.5A 250VAC slo-blo) para los tamañosAVy7900, AVy71100 y AVy71320.En los tamaños AVy6750 y AVy81600 el fusible se debe montar en elexterior.
*) solo para DrivesAVy6750 y AVy81600

32 • Capítulo 3 – Especificaciones mecánicas ARTDriveL Manual de instrucciones
3.3 Espacios libres en el montaje e instalación
¡NOTA! Las dimensiones y los pesos especificados en este manual se deberían teneren cuenta al montar el dispositivo. Se debería utilizar los equipos técnicosrequeridos (carro o grúa para pesos pesados). El manejo indebido y el usode herramientas inadecuadas podrían causar daños.
Figura 3.3.1: Ángulo máximo de inclinación
El ángulo máximo de inclinación es de 30°
¡NOTA! Los drives se deben montar de una forma que se asegure el flujo de airelibre. El espacio libre para el dispositivo debe ser por lo menos de 150mm (6 pulgadas). Se debe asegurar un espacio de por lo menos 50 mm (2pulgadas) en la parte delantera. En el tamaño 81600 el despeje de laparte superior e inferior debe ser de por lo menos 380 mm (15 pulgadas),en los laterales y la parte frontal se debe asegurar un espacio de por lomenos 140 mm (5,5 pulgadas). Los dispositivos que generan mucho calorno se deben montar en las proximidades del drive.
Figura 3.3.2: Espacio libre en el montaje
10 mm ( 0.4" )[140mm (5.5")]
150 mm ( )6"[380mm (15")]
50 mm ( 2" )[140mm (5.5”)]
20 mm ( 0.8" )[140mm (5.5")]
150 mm ( )6"[380mm (15")]
10 mm ( 0.4" )[140mm (5.5")]
[...] for 81600 size
¡NOTA! Los tornillos de fijación se deberían volver a apretar después de unosdías de funcionamiento.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 33
Capítulo 4 – Conexión eléctrica
4.1 Acceso a los conectores
4.1.1 Extracción de la cubierta
¡NOTA! Observar las indicaciones de seguridad descritas en este manual. Losequipos pueden abrirse sin grandes esfuerzos. Emplear sólo las herramientasindicadas.
Figura 4.1.1: Extracción de las cubiertas (tamaños 1007 ... 3150)
2
1
3
2
no. 2 for20-40 ...30-60
size
Tamaños 1007 ... 2075Para realizar la conexión eléctrica, extraer el cierre y la mascarilla de entradade cables:- aflojar el tornillo (1), extraer el cierre (2) del aparato presionando sobre
dos lados y extrayéndolo como se indica en la figura (3).- aflojar los dos tornillos (4) para retirar la mascarilla de entrada de cables.Para montar las tarjetas opcionales y modificar la configuración de lospuentes internos, retirar la envolvente:- retirar el teclado y el conector (5)- elevar la envolvente por la parte inferior (por encima del nivel del
conector) y empujar de la misma hacia adelante (6)
Tamaños 3110 ... 3150Para realizar la conexión eléctrica, retirar el cierre y la mascarilla de entradade cables:- aflojar los dos tornillos (1) y extraer el cierre del aparato.- aflojar los dos tornillos (4) para retirar la mascarilla de entrada de cables.Para montar las tarjetas opcionales y modificar la configuración de lospuentes internos, retirar la envolvente:- retirar el teclado y el conector (5)- subir la envolvente por la parte inferior (por encima del nivel del
conector) y empujar de la misma hacia adelante (6)

34 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Figura 4.1.2: Retirada de las cubiertas (tamaños 4185... 81600)
2 2
1
3
3
4
Tamaños 4185 ... 81600PPara realizar la conexión eléctrica, retirar la cubierta (1) del aparatoaflojando los dos tornillos (2). Para montar las tarjetas opcionales ymodificar la configuración de los puentes internos, aflojar los dos tornillos(3) y retirar la cubierta superior desplazándola en el sentido indicado (4).
4.2 Parte de potencia
Fíjese que una conexión incorrecta en las fases del motor puede hacer queel motor se mueva sin control y puede destruir el inverter. Antes de habilitarel inverter compruebe que las fases del motor están conectadas en lasecuencia correcta.
¡Para no dañar de manera irreparable elproducto, no está permitido extraer y/otransportar el aparato sujetándolo por lastarjetas!

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 35
4.2.1 Denominación de los bornes de potencia / sección de los cablesFigura 4.2.1.1: Terminales de la sección de alimentación desde 1007 hasta 3150
Función max
Conexión a tierra del motor
Comando de la resistencia de la unidad de frenado(la resistencia de frenado debe conectarse entre BR1 y C)
Conexión de circuito intermedioCorriente de
salida de770V CC / 1.65
Voltaje de red de CA230V -15% …
460V+15%, 3Ph
Conexión del motor
Corriente desalida de 1.36 de3Ph de voltaje
de la línea de CA
Resistencia internade frenado
M
3Ph~
PE1 / Conductor a tierra (tierra de protección)
U1/L1
V1/L2
W1/L3
BR1
U2/T1
V2/T2
W2/T3
C
D
PE2/
EM
EM
FEXT
FEXT
Señal del módulo de emergencia requeridapara interactuar el drive con el dispositivo
de EMS (Proveedor del módulo de emergencia)0.22A
250Vac1A
Señal lógica de control del ventiladorrepetida en un ventilador externo (*)
En la tarjeta FAN-CEXP
Figura 4.2.1.2: Terminales de la sección de alimentación desde 4185 hasta 81600
max
M
3Ph~U1/L1
V1/L2
W1/L3
BR1
U2/T1
V2/T2
W2/T3
C
D
PE2/
230V -15% …460V+15%, 3Ph
PE1 /
EM
EM
FEXT
FEXT
0.22A
250Vac1A
Conexión a tierra del motor
Comando de la resistencia de la unidad de frenado(la resistencia de frenado debe conectarse entre BR1 y C)
Conexión de circuito intermedioCorriente de
salida de770V CC / 1.65
Voltaje de red de CA
Conexión del motor
Corriente desalida de 1.36 de3Ph de voltaje
de la línea de CA
Resistencia internade frenado
Conductor a tierra (tierra de protección)
Señal del módulo de emergencia requeridapara interactuar el drive con el dispositivo
de EMS (Proveedor del módulo de emergencia)
Señal lógica de control del ventiladorrepetida en un ventilador externo (*)
Función
(*) I ventilatori devono sempre avviarsi quando il drive è abilitato.I ventilatori devono fermarsi dopo un periodo di 300 sec. che l'inverter sia stato disabilitatoe dopo che la temperatura del dissipatore sia scesa sotto i 60°C.
¡Nota!
Los terminales EM yFEXT sólo estándisponibles en los tamañosde AVy2040AC4 / BR4hasta AVy5550AC4 / BR4.
¡Nota!
Los terminales EM yFEXT sólo estándisponibles en los tamañosde AVy2040AC4 / BR4hasta AVy5550AC4 / BR4.

36 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Distribución de los terminales de alimentación con tamaño de 1007hasta 3150Los terminales de los dispositivos son accesibles extrayendo la cubierta yla placa de entrada del cable (consulte la sección 4.1, “Acceso a losconectores”), en algunos tipos de drive también es posible extraer el conectorextraíble. Todos los terminales de alimentación están situados en la tarjetade alimentación PV33-...Distribución de los terminales de alimentación con tamaño de 4185hasta 81600Los terminales de los dispositivos son accesibles extrayendo la cubierta(consulte la sección 4.1, “Acceso a los conectores”).Tamaños máximos de cable para los terminales de alimentación U1,V1, W1, U2, V2, W2, C, D, PE
Tabla 4.2.1.3: Sección máxima de cable para los terminales de alimentación
Type 1007 1015 1022 1030 2040 2055 2075 3110 3150 4185...4221 4300-3401
AWG 12 8 4
mm2 8 10 16 25
(sq in) (0.012) (0.016) (0.025) (0.039)
Tightening torque Nm 2 3
(lbf . in) (17.7) (26.5)
AWG 12 8 6 10 8
mm2 8 10 6 10
(sq in) (0.012) (0.016) (0.009) (0.016)
Nm 0.9 1.6
(lbf . in) (7.9) (14.1)
AWG 12 8 6
mm2 8 10 16 16(sq in) (0.012) (0.016) (0.025) (0.025)
Nm 2 3(lbf . in) (17.7) (26.5)
Type 4370-4371 5450 5550 6750 7900 71100 71320 81600
AWG 1/0 2/0 4/0 300* 350* 4xAWG2 * = kcmilsmm2 50 70 95 150 185 4x35
(sq in) (0.078) (0.109) (0.147) (0.233) (0.287) (0.006x0.054)
Tightening torque Nm
(lbf . in)
AWG 8
mm2 10
(sq in) (0.016)
Nm 1.6
(lbf . in) (14.1)
AWG
mm2
(sq in)
Nm 3
(lbf . in) (26.5)
Type
AWG
mm2
(sq in)
Nm
(lbf . in)
tadl4040L
Tightening torque
EM, FEXT terminals
10 - 30
U1,V1,W1,U2,V2,W2,C,D
terminals
BR1 terminals
Tightening torque
Tightening torque
14
2
2 4
(4.4) to (5.3)
610
4
14 10
(0.003) (0.006)
0.5 to 0.6 1.2 to 1.5
(10.6) to (13.2)
616
35
6
16
2
250
(88.5) - (265.5)
(4.4) to (5.3)
0.5 to 0.6
(10.6) to (13.2)
1.2 to 1.5
14 10 6
0.5 to 0.6 1.2 to 1.5
(4.4) to (5.3) (10.6) to (13.2)
(0.003) (0.006)
PE1, PE2 terminals 2(0.003)
4(0.006)
U1,V1,W1,U2,V2,W2,C,D
terminals(0.054)
(0.006) (106.2)4 12
(0.025)BR1 terminals
terminals not available
(26.5)Tightening torque
3
PE1, PE2 terminals
(35.4)Tightening torque
4
2040 up to 5550
0.4
(0.025) (0.078)
28 … 16
0.14 … 1.5
El conductor a tierra del cable del motor puede conducir hasta dos vecesel valor de la corriente nominal si hay un fallo a tierra en la salida deldrive ARTDriveL.
¡NOTA! Utilice sólo el conductor de cobre de 60/75°C.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 37
Tamaños máximos del cable para los terminales de controlTabla 4.2.1.4: Sección máxima de cable permisible en los terminales conectados de la
sección del regulador
Maximum Permissible Cable Cross-Section Tightening
[mm2] torque
flexible multi-core [Nm]
1 ... 79 0.14 ... 1.5 0.14 ... 1.5 28 ... 16 0.480 ... 85 0.14 ... 1.5 0.14 ... 1.5 28 ... 16 0.4
txv0065L
AWGTerminals
Se recomienda el uso de un destornillador plano de 75 x 2.5 x 0.4 mm (3x 0.1 x 0.02 pulgadas). Elimine unos 6,5 mm (0.26 pulgadas) delaislamiento de los extremos del cable. Sólo se debería conectar un cablesin preparar (sin manguito) a cada punto de terminal.
Longitud máxima del cableTabla 4.2.1.5: Longitudes máximas del cable de control
Cable section [mm2] 0.22 0.5 0.75 1 1.5Max Length m [feet] 27 [88] 62 [203] 93 [305] 125 [410] 150 [492]
avy3130

38 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.3 Sección de regulación
4.3.1 Puentes y conmutador de la tarjeta de regulación RV33-4NV
FRONT SIDE BACK SIDE
Tabla 4.3.1.1: LEDs y puntos de prueba en la tarjeta de regulación
DesignaciónDesignaciónDesignaciónDesignaciónDesignación ColorColorColorColorColor FFFFFunciónunciónunciónunciónunciónPWM verde LED iluminado en la modulación IGBTRST rojo El LED se ilumina durante el restablecimiento del hardwarePWR verde El LED se ilumina cuando hay voltaje +5V y en el nivel correctoRUN verde LED parpadea cuando se está ejecutando la regulación (no en el menú STARTUP)RS485 verde El LED se ilumina cuando hay conexión con el interface RS485+5VE verde LED se ilumina cuando la fuente de alimentación del encoder es +5V (XE-9)+8VE rojo LED se ilumina cuando la fuente de alimentación del encoder es +8V (XE-2)XY4 (punto de prueba) Señal de corriente de fase (U)XY5 (punto de prueba) Punto de referencia

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 39
Tabla 4.3.1.2: Puentes y conmutadores DIP en la tarjeta de regulación RV33-4
Designación Función Ajuste de fábrica
S5 - S6 Resistencia terminadora para el interface serie RS485 ON
ACTIVADO= Resistencia terminadora IN (ACTIVADO)
DESACTIVADO= Sin resistencia terminadora (*)
S8 Adaptación a la señal de entrada de la entrada analógica 1 (terminales 1 y 2) OFF
ACTIVADO=0...20 mA / 4...20 mA (DESACTIVADO)
DESACTIVADO=0...10 V / -10...+10 V
S9 Adaptación a la señal de entrada de la entrada analógica 2 (terminales 3 y 4) OFF
ACTIVADO=0...20 mA / 4...20 mA (DESACTIVADO)
DESACTIVADO=0...10 V / -10...+10 V
S10 Adaptación a la señal de entrada de la entrada analógica 3 (terminales 5 y 6) OFF
ACTIVADO=0...20 mA / 4...20 mA (DESACTIVADO)
DESACTIVADO=0...10 V / -10...+10 V
S11 - S12 - S13 Ajuste del encoder (puentes en el equipo EAM_1618 suministrados con el drive) OFF
S14 - S15 - S16 ACTIVADO=Encoder SE o SESC sinusoidal (DESACTIVADO)
(**) DESACTIVADO=Encoder DE o DEHS digital
S17 Monitorización del canal C del encoder digital OFF
(**) ACTIVADO=Canal C monitorizado (DESACTIVADO)
DESACTIVADO=Canal C no monitorizado (se requiere para los canales con final único)
S18 - S19 Ajustes del encoder A
S20 - S21 Pos. B=encoder DEHS digital
(**) Pos. A= encoder SESC sinusoidal
S22 - S23 Habilitación de la entrada analógica 3 (alternativo con el encoder SESC) A
(**) Pos. A= si se utiliza el encoder SESC
Pos. B=entrada analógica 3 habilitada
Pos. DESACTIVADO= resolución
S26 - S27 (**) Habilitación del uso de la resolución ON
Pos. ACTIVADO=cuando no se utiliza la resolución (ACTIVADO)
Pos. DESACTIVADO=resolución
Selección de la fuente de alimentación interna del encoder
ACTIVADO / ACTIVADO = +5 V
DESACTIVADO / DESACTIVADO = +8 V
S29 Uso interno A
Segunda entrada del calificador del encoder
A=desde la placa EXP-…
B=desde la entrada digital "6" en RV33-4
S34 Puente para desconectar 0V (fuente de alimentación de +24V) de masa ON
ON = 0V conectados a masa (ACTIVADO)
OFF = 0V desconectados de tierra (cable)
S35 Puente para desconectar 0V (placa de regulación) de masa ON
ON = 0V conectados a masa (ACTIVADO)
OFF = 0V desconectados de tierra (cable)
S36 Uso interno no montado
S37 Uso interno no montado
S38-S39 Uso interno ON
Fuente de alimentación para el interface serie RS485 OFF
ON = Fuente de alimentación interna (desde las patillas XS.5 / XS.9) (DESACTIVADO)
OFF = Fuente de alimentación externa (a las patillas XS.5 / XS.9)
ay4060e
(*)
(**)
(***) consulte el capítulo 5.4
S28 ON/ON
en conexiones de múltiples elementos el puente debe estar ACTIVADO (ON) sólo para el último elemento de una línea
serie
consulte la tabla 4.5.2 para más información relacionada con el ajuste del puente del encoder
S30 B
S40-S41
(***)
En las condiciones de suministro estándar los aparatos ya están configuradoscorrectamente. ¡Cuando la tarjeta de regulación se haya suministradocomo recambio, colocar el interruptor encoder para el tamaño deseado!

40 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.3.2 Asignación del terminal en la sección de regulaciónTabla 4.3.2.1: Asignaciones de la placa del terminal conectado
1
2
3
4
5
6
7
8
9
12
13
14
15
16
18
19
BU-
Unità di frenatura
esterna (opzionale)
Placa X1 Función máx.
Entrada diferencial analógica programable/configurableSeñal: terminal 1Punto de referencia: terminal 2
±10V
Entrada diferencial analógica programable/configurableSeñal: terminal 3Punto de referencia: terminal 4
0.25mA
(20mA cuandoexiste una
entrada de buclede corriente)
Entrada diferencial analógica programable/configurableSeñal: terminal 5Punto de referencia: terminal 6
+10V Voltaje de referencia +10V; Punto de referencia: terminal 9 +10V/10mA
-10V Voltaje de referencia -10V; Punto de referencia: terminal 9 -10V/10mA
0V OV interno y punto de referencia para ±10V -
Enable/
Digital input 0
Convertidor ENABLE, activado=alto. Al mismo tiempo, se puede utilizar comuna entrada programable. (No hay ajuste por defecto) +30V
Digital input 1 3.2mA @ 15V
5mA @ 24V
6.4mA @ 30V
COM D I/O Punto de referencia para las entradas y salidas digitales, term.12...15, 36...39, 41...42 -
0 V 24 Punto de referencia para la fuente de alimentación de + 24V OUT, terminal 19 -
+24V OUT Salida de alimentación de +24V. Punto de referencia: terminales 18 o 27 o 28+22…28V
120mA @ 24V
Analog input 1
Analog input 2
Analog input 3
Analog output
1 Salida analógica programable, Ajuste por defecto: NULL ±10V/5mA
0V 0V interno y punto de referencia para los terminales 21 y 23 -
Analog output
2 Salida analógica programable, Ajuste por defecto: NULL ±10V/5mA
BU comm.
output
Comando de unidades de frenado BU-... controladas con VeCon.Punto de referencia: term.27.
+28V/15mA
0 V 24 Punto de referencia para el comando BU-..., terminal 26 -
RESERVED -
Digital input 4 +30V
Digital input 5 3.2mA @ 15V
Digital input 6 5mA @ 24V
Digital input 7 6.4mA @ 30V
Digital output2
+30V/40mADigital output
3
Supply D OEntrada de alimentación para las salidas digitales en los terminales 41/42.Punto de referencia: term.16. +30V/80mA
Motor PTC 1.5mA
Salida programable, Ajuste por defecto: DRIVE READY
Sensibilidad PTC del motor para calentamiento(si se utiliza R1k de corte)
MLT SPD S0Ajuste por defecto:
21
22
23
26
27
28
29
36
37
38
39
41
42
46
78
79R1K
250V AC1 A
250V AC1 A
Digital output 0
RelayContacto de relé sin potencial, salida programable,Por defecto=DRIVE OK
80
82
83
85
RESERVED
Digital input 3
Digital input 2
Digital output 1
Relay
Contacto de relé sin potencial, salida programable,Por defecto= BRAKE CONT MON
Entrada programable, Ajuste por defecto: START FWD
Entrada programable, Ajuste por defecto: START REW
Entrada programable, Ajuste por defecto: NULL
Ajuste por defecto: MLT SPD S1
Ajuste por def.: Config. como calificador de índice del 2º encoder (ajustea través del puente S30, el par. "Digital input 6" debe ajustarse como no utilizado)
MLT SPD S2.
Ajuste por def.: Configurable como calificador de índicedel 1er encoder el par. "Digital input 7" debe ajustarse como no utilizado)
FAULT RESET.
Salida programable, Ajuste por defecto: SPEED IS 0
Ent
rada
prog
ram
able
Placa X2 Función máx.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 41
La tensión de + 24Vdc utilizada para alimentar externamente la placa deregulación debe estar estabilizada y con una tolerancia de ±10%; absorciónmáxima de 1A.Las alimentaciones obtenidas con rectificador único y filtro capacitivo noson adecuadas.
4.4 Potenciales de la sección de control
Figura 4.4.1-A: Potenciales de la sección de control, Conexión NPN E/S Digital
12
34
56
+24V
13
14
15
36
37
38
39
16
29
28
Over TemperatureMotor
1k
Analog input 1
Analog input 2
Analog input 3
Enable (Digital input 0)
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Digital input 7
Internal power supplyfrom Power Card
COM D I/O
+24 V
0 (+24 V)
78
79
Analogoutput 2
21
220 V
23
7
9
8
+10V
- 10V
0 V
8385
8082
Digital output 1
Digital output 0
46
41
42
Digital output 2
Digital output 3
19
18
26
27
+24V
0V (24V)
BU
To Expansion Cards
S35
S34
Analogoutput 1
0V(+24V)
LOAD
+24V
0V(+24V)
LOAD
12
¡NOTA! La combinación de entradas NPN-salidas PNP y viceversa no está permitida.
Los potenciales de la sección de regulación están aislados y se puedendesconectar mediante puentes desde tierra.Las conexiones entre cada potencial se muestran en la Figura 4.4.1 .Las entradas analógicas están diseñadas como amplificadores diferenciales.Las entradas digitales están optoacopladas con el circuito de control.

42 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Las entradas digitales tienen el terminal 16 como punto de referencia.Las salidas analógicas no están diseñadas como amplificadoresdiferenciales y tienen un punto de referencia común (el terminal 22).Las salidas analógicas y el punto de referencia ±10V tienen el mismopotencial (el terminal 9 y el 22).Las salidas digitales están optoacopladas con el circuito de control. Lassalidas digitales (el terminal 41 y el 42) tienen el mismo potencial (elterminal 16) y el terminal 46 como fuente común.
Figura 4.4.1-B: Potenciales de la sección de control, Conexión PNP E/S Digital
12
34
56
13
14
15
36
37
38
39
16
29
28
Over TemperatureMotor
1k
Analog input 1
Analog input 2
Analog input 3
Enable (Digital input 0)
Digital input 1
Digital input 2
Digital input 3
Digital input 4
Digital input 5
Digital input 6
Digital input 7
Internal power supplyfrom Power Card
COM D I/O
+24 V
0 (+24 V)
78
79
Analogoutput 2
21
220 V
23
7
9
8
+10V
- 10V
0 V
8385
8082
Digital output 1
Digital output 0
46
41
42
Digital output 2
Digital output 3
19
18
26
27
+24V
0V (24V)
BU
To Expansion Cards
S35
S34
Analogoutput 1
0V(+24V)
LOAD
LOAD
+24V+24V
0V(+24V)
12
¡NOTA! La combinación de entradas NPN-salidas PNP y viceversa no está permitida.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 43
4.5 Encoders
Se pueden conectar varios tipos de encoders al conector XE (zócalo de 15polos de alta densidad, adaptado al dispositivo), consulte la tabla 4.5.2para los ajustes del puente.
• AVy ... AC / AC4:- DE: encoder incremental digital con trazos A+ / A-, B+ / B-, C+ / C-- SE: encoder incremental sinusoidal con trazos A+ / A-, B+ / B-, C+ / C-
• AVy ... BR / BR4:- SEHS: encoder incremental sinusoidal con trazos A+ / A-, B+ /B, C+
/ C- y tres trazos de posición absoluta del “Hall sensor” digital para lasincronización inicial (ajuste de fábrica).
- SESC: encoder incremental sinusoidal con trazos A+ / A-, B+ /B, C+/ C- y dos trazos de posición absoluta Sin Cos analógico para lasincronización inicial.
- SExtern: encoder incremental sinusoidal con trazos A+ / A-, B+ / B-,C+ / C- e información de posición absoluta a través del interface de laserie SSI para la sincronización inicial (requiere tarjeta APC100y).
- DEHS: encoder incremental digital con trazos A+ / A-, B+ /B, C+ / C-y tres trazos de posición absoluta del “Hall sensor” digital (ajuste defábrica).
- DExtern: encoder incremental digital con trazos A+ / A-, B+ / B-, C+/ C- e información de posición absoluta a través del interface de laserie SSI para la sincronización inicial (requiere tarjeta APC100y).
- SC: encoder sinusoidal con dos trazos de posición absoluta SinCosanalógicos
- RES: resolución (requiere tarjeta EXP-RES)- SEHiperface: encoder incremental sinusoidal con trazos A+ / A-, B+
/ B- e interface Hiperface- SE Intern: (Sinusoidal Intern) encoder incremental sinusoidal con
trazos A+ / A-, B+ / B-, C+ / C-, los trazos de posición absoluta no sonnecesarios ya que la sincronización de fase se realiza de formaautomática en cada puesta en marcha.
- DE Intern: (Digital Intern)encoder incremental digital con trazos A+/ A-, B+ / B-, C+ / C-, los trazos de posición absoluta no son necesariosya que la sincronización de fase se realiza de forma automática en cadapuesta en marcha.
- SE EnDat: encoder sinusoidal incremental con trazos A+/A-,B+/B- einterface Endat (requiere tarjeta EXP-ENDAT-AVy)
Los encoders se utilizan para realimentar una señal de velocidad para eldrive. El encoder se debería acoplar al eje del motor con una conexiónlibre de efectos reactivos.Los resultados de la regulación óptima se consiguen cuando se utilizanencoders sinusoidales. Los encoders digitales también se pueden utilizarpero las propiedades de regulación empeoran con velocidades bajas.El cable del encoder compuesto de pares trenzados con un blindaje globaldeberían estar conectados a tierra en la parte del drive. Generalmente elblindaje no debería estar conectado a tierra en la parte del motor. En algunasinstalaciones con altos ruidos electromagnéticos conectar también el

44 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
blindaje en la parte del motor ayuda a suprimir la recuperación de losimpulsos falsos del encoder y reduce cantidad de perturbaciones en lavelocidad medida.En el caso del motor sin escobillas o donde la longitud del cable es superiora 100 metros (328 pies), se debe utilizar un cable con un blindaje en cadapar de conductores. El blindaje se tiene que conectar al punto común (OV).El blindaje global siempre se debe poner a tierra.Algunos tipos de encoders sinusoidales pueden requerir la instalación conaislamiento galvánico desde el marco y el eje del motor.
Tabla 4.5.1: Sección y longitud de cable recomendada para la conexión de los encoders
Cable section mm2 0.22 0.5 0.75 1 1.5
Max Length (m) [feet] 27 [88] 62 [203] 93 [305] 125 [410] 150 [492]txv0055
Tabla 4.5.2: Ajuste de los encoders mediante los puentes S11...S23
Encoder / Jumpers setting S11 S12 S13 S14 S15 S16 S17 S18 S19 S20 S21 S22 S23 S26 S27
DE OFF OFF OFF OFF OFF OFF (*) - - - - - - - -
SE ON ON ON ON ON ON (*) - - - - - - - -
SEHS ON ON ON ON ON ON (*) B B B B - - - -
SESC ON ON ON ON ON ON (*) A A A A A A ON ON
SExtern ON ON ON ON ON ON (*) - - - - - - - -
DEHS OFF OFF OFF OFF OFF OFF (*) B B B B - - - -
DExtern OFF OFF OFF OFF OFF OFF (*) - - - - - - - -
SC - - - - - - (*) A A A A A A ON ON
RES - - - - - - (*) - - - - OFF OFF OFF OFF
RES (**) - - - - - - (*) OFF OFF OFF OFF A A ON ON
SEHiperface ON ON ON ON ON ON (*) - - - - - - - -
SE Endat ON ON ON ON ON ON (*) - - - - - - - -
ai3150L
(*) Si el encoder no dispone del canal cero: S17=DESACTIVADO(**) Con EXP-RES + Tarjeta de regulación RV33-4B y superior
El puente S17 selecciona la inhibición o la habilitación de la lectura de losimpulsos del canal C. Tiene que estar correctamente seleccionado parapoder detectar adecuadamente la alarma de pérdida del encoder.S17 ACTIVADO: lectura (índice) del canal C=ACTIVADOS17 DESACTIVADO: lectura (índice) del canal C=DESACTIVADO
Tabla 4.5.3: Conexiones de los encoders
Tarjeta de regulación
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
B- +8V C+ C- A+ A- 0V B+ +5V E+ E- F+ F- G+ G-
DE 8 polos
SE 8 polos
SESC 12 polos
DEHS 14 polos
SEHS 14 polos
DE 8 polos
SE 8 polos
SESC 12 polos
DEHS 14 polos
SEHS 14 polos
ai3160
XE CONNECTOR PIN
Tipo de encoder Cable blindado
Alimentación interna del encoder +5V
Alimentación interna del encoder +8V

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 45
Tarjeta de regulación
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
B- +8V C+ C- A+ A- 0V B+ +5V E+ E- F+ F- G+ G-
6 polos
1 2 3 4 5 6 7 8 9
RxA
TxA0V
RxB
TxB+5V
2 polos
conexióncon
pin 8
conexióncon
pin 9
ai3161L
¡Nota!: - En este caso el cable debe estar dividido en dos
XS CONNECTOR PIN
Tipo de encoderCable
blindado
XE CONNECTOR PIN (RV33-3)
SEHiperface
Tarjeta de regulación + Tarjeta de expansión (EXP-RES)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
Sin+ Sin- Cos+ Cos- Rot- Rot+
RES 6 polos
Tarjeta de regulación + Tarjeta de opciones (APC100y con E-ABS)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
B- +8V C+ C- A+ A- 0V B+ +5V E+ E- F+ F- G+ G-
8 polos
1 2 3 4 5 6 7
CK- CK+ EQP DT- DT+ Gnd 0V
4 polos
ai3160L
¡Nota!: - En este caso el cable debe estar dividido en dos- Para EQP, Gnd y los terminales 0V consulte los manuales de la tarjeta
Tipo de encoder Cable blindado
XFR CONNECTOR PIN (EXP-RES)
Tarjeta de aplicación TERMINALS (APC100y)
Tipo de encoder Cable blindado
XE CONNECTOR PIN (RV33-1)
SExtern
DExtern
Requisitos:
Encoders sinusoidales (Conector XE de la tarjeta de regulación)Frecuencia máx. _____________ 80 KHz seleccione el número de impulsos apropiado según la
velocidad máx. requerida)Número de impulsos por revolución min 512, máx. 9999 (consulte la tabla siguiente)Canales ____________________ dos canales, diferencialesAlimentación ________________ + 5 V (Alimentación interna) *Capacidad de carga ___________ > 8.3 mA pp por canal (resistencia de entrada = 124 Ohmios).Cable máximo _______________ 150 m, apantallado, 4 pares trenzados.
* Configure el software del drive para la gama de amplitude de la señal del encoder en uso(STARTUP / Startup config / Encoders config / Std sin enc Vp)

46 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Encoders digitales (Conector XE de la tarjeta de regulación)frecuencia máxima ___________ 150 KHz (seleccione el número de impulsos apropiado según la
velocidad máx. requerida)Número de impulsos por revolución _ min 512 / máx 9999: (consulte la tabla siguiente)Canales ____________________ - dos canales, diferenciales A+ / A-, B+ / B-, C+ / C-. Es posible
una detección de pérdida del encoder mediante el ajuste del firmware.- dos canales, (A,B). No es posible la detección de pérdida del encoder.
Tensione di ingresso __________ 5 VAlimentación ________________ + 5 V (Alimentación interna) *Capacidad de carga ___________ > 4.5 mA / 6.8 ... 10 mA por canal
* Mediante el teclado (STARTUP / Startup config / Encoder config) es posible seleccionar 4valores diferentes de voltaje de alimentación del encoder interno para compensar la reducciónde voltaje debida a la longitud del cable del encoder y al encoder de corriente de carga.Las seleccióones disponibles, en función del jumper S28, son:- para + 5V: 0=5.41V, 1=5.68V, 2=5.91V, 3=6.18V a través del parámetro Std enc supply.- para +8V: 8.16V, 8.62V, 9.00V, 9.46V a través del parámetro Std enc supply.
Resolución de referenciaSpeed D (rpm)
Número máximo deimpulsos del encoder
(ppr)
(FSS=Full scale speed)
0.0031250.1250.250.5
1
150kHz* 60/FSS
Pares del polo del motor (rpm@50Hz)
Pares del polo del motor (rpm@60Hz)
Número mínimo de impulsos del encoder recomendados (ppr)
512512512512512
2(1500)2(1500)2(1500)2(1500)2(1500)2(1800)2(1800)2(1800)2(1800)2(1800)
512512512512512
3(1000)3(1000)3(1000)3(1000)3(1000)3(1200)3(1200)3(1200)3(1200)3(1200)
10241024102410241024
4(750)4(750)4(750)4(750)4(750)4(900)4(900)4(900)4(900)4(900)
10241024102410241024
5(600)5(600)5(600)5(600)5(600)5(720)5(720)5(720)5(720)5(720)
10241024102410241024
6(500)6(500)6(500)6(500)6(500)6(600)6(600)6(600)6(600)6(600)
512256256256256
1(3000)1(3000)1(3000)1(3000)1(3000)1(3600)1(3600)1(3600)1(3600)1(3600)
Resolución de referenciaSpeed D(rpm)
Número máximo deimpulsos del encoder
(ppr)
(FSS=Full scale speed )
0.0031250.1250.250.5
1
80kHz* 60/FSS
Pares del polo del motor (rpm@50Hz)
Pares del polo del motor (rpm@60Hz)
Número mínimo de impulsos del encoder recomendados (ppr)
40961024512512512
2(1500)2(1500)2(1500)2(1500)2(1500)2(1800)2(1800)2(1800)2(1800)2(1800)
40961024512512512
3(1000)3(1000)3(1000)3(1000)3(1000)3(1200)3(1200)3(1200)3(1200)3(1200)
40961024102410241024
4(750)4(750)4(750)4(750)4(750)4(900)4(900)4(900)4(900)4(900)
40961024102410241024
5(600)5(600)5(600)5(600)5(600)5(720)5(720)5(720)5(720)5(720)
40961024102410241024
6(500)6(500)6(500)6(500)6(500)6(600)6(600)6(600)6(600)6(600)
40961024
512512512
1(3000)1(3000)1(3000)1(3000)1(3000)1(3600)1(3600)1(3600)1(3600)1(3600)
Prueba de alimentación del encoder (si se utiliza la fuente dealimentación interna +5V)Durante el arranque del drive:- verifique la fuente de alimentación del encoder hacia los terminales de
los encoders con todos los canales de los encoders conectados- mediante el parámetro Std enc supply ajuste el voltaje apropiado si la
característica de la fuente de alimentación del encoder (ejemplo: +5V± 5%) se encuentra fuera del intervalo.
Terminales para las conexiones del encoder externo
Tipo de terminales macho: ______ 15 polos de alta densidad (del tipo VGA)Cubierta del conector: _________ Perfil bajo de 9 polos estándar (Por ejemplo el código del
fabricante: AMP 0-748676-1, 3M 3357-6509)
1 5
6 9
1 5
11 156 10
XE XS

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 47
La conexión con el drive se lleva a cabo a través de un conector sub-D dealta densidad y de 15 polos (del tipo VGA). Fíjese que es obligatorio utilizarun cable blindado con al menos el 80 % de cobertura. El blindaje deberíaestar conectado a tierra en ambas partes.
¡NOTA! Para un firmware sin escobillas síncrono es posible utilizar sólo el encodercon impulsos por revolución para un número que sea potencia de 2.Ejemplo: 512 ppr, 1024 ppr, 2048 ppr, etc.
Tabla 4.5.4: Asignación del conector XE de alta densidad para un encoder sinusoidal o digital
Función I/O Voltaje máx. Corriente máxima
Canal B- 5 V digitales o 10 mA digitales o
Señal del encoder incremental B negativa 1 V pp analóg. 8.3 mA analóg.
PATIL 2Voltaje de alimentación del encoder +8V (consulte latabla 4.5.3)
O +8 V 200 mA
Canal C+ 5 V digitales o 10 mA digitales o
Señal Índice positiva del encoder incr 1 V pp analóg. 8.3 mA analóg.
Canal C- 5 V digitales o 10 mA digitales o
Segnale encoder incrementale Index negativo 1 V pp analóg. 8.3 mA analóg.
Canale A+ 5 V digitales o 10 mA digitales o
Señal del encoder incremental A positiva 1 V pp analóg. 8.3 mA analóg.
Canal A- 5 V digitales o 10 mA digitales o
Señal incremental A negativa del encoder 1 V pp analóg. 8.3 mA analóg.
PATIL 7 GNDPunto de referencia para el voltaje de alimentacióndel encoder +5V
O – –
Canal B+ 5 V digitales o 10 mA digitales o
Señal del encoder incremental B positiva 1 V pp analóg. 8.3 mA analóg.
PATIL 9 AUX+ Alimentazione encoder +5V (vedere tabella 4.5.3) O +5 V 200 mA
Canal HALL1 + / SIN+ 5 V digitales o 10 mA digitales o
Encoder analógico Hall 1 positivo/Sin positivo 1 V pp analóg. 8.3 mA analóg.
Canal HALL 1- / SIN- 5 V digitales o 10 mA digitales o
Encoder analógico Hall 1 negativo/Sin negativo 1 V pp analóg. 8.3 mA analóg.
Canal HALL 2+ / COS+ 5 V digitales o 10 mA digitales o
Encoder analógico Hall 2 positivo/Cos positivo 1 V pp analóg. 8.3 mA analóg.
Canal HALL 2- / COS- 5 V digitales o 10 mA digitales o
Encoder analógico Hall 2 negativo/Cos negativo 1 V pp analóg. 8.3 mA analóg.
Canal HALL 3 + 5 V digitales o
Hall 3 positivo 1 V pp analóg.
Canal HALL 3 - 5 V digitales o
Hall 3 negativo 1 V pp analóg.
ai3140L
HALL 2+/COS+
HALL 2-/COS-
HALL 3+
HALL 3-
Designación
ENC B-
ENC C-
ENC A+
ENC C+
PATIL 1
PATIL 3
PATIL 4
PATIL 5
10 mA digitales
10 mA digitalesPATIL 14
I
I
I
PATIL 15 I
PATIL 12
PATIL 13
I
I
I
I
PATIL 10
PATIL 11
I
IHALL 1-/SIN-
HALL 1+/SIN+
I
I
PATIL 6
PATIL 8
ENC A-
ENC B+
4.5.1 Asignaciones del conector XFR (en una tarjeta de expansión EXP-RES opcional para la resolución)
La conexión con el drive se lleva a cabo a través de un conector sub-D dealta densidad y de 15 polos (del tipo VGA). Fíjese que para larealimentación de la resolución es obligatorio utilizar un cable de partrenzado con blindajes en cada par y un blindaje global. El blindaje deberíaestar conectado a tierra en ambas partes.

48 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Función E/S Voltaje máx. Intensidad máx.
Patilla 1 … 2 - - - - -Patilla 3 RES-SINP Entrada sin + E 1 V pp analógico 3,8 mA analógicosPatilla 4 RES-SINN Entrada sin - E 1 V pp analógico 3,8 mA analógicosPatilla 5 RES-COSP Entrada cos + E 1 V pp analógico 3,8 mA analógicosPatilla 6 RES-COSN Entrada cos - E 1 V pp analógico 3,8 mA analógicosPatilla 7 … 9 - - - - -Patilla 10 RES-ROTN Excitación - Salida S 6 Voltios 50 mA rms máxPatilla 11 … 14 - - - - -Patilla 15 RES-ROTP Excitación + Salida S 6 Voltios 50 mA rms máx
ai3140ER
Asignación
¡AVISO! Los números de patilla 1, 2, 7...9, 11...14 están reservados.
¡NOTA! Consulte el manual EXP-RES (código 1S5E66) para más información.
4.5.2 Simulación del encoder
La tarjeta de expansión EXP-RES proporciona una salida de encoderincremental, con niveles de drive de la línea TTL, que se puede utilizarpara la simulación de un dispositivo de realimentación del servomotor.Esta función la ejecuta el microprocesor y es posible simular una salidadel encoder con un número de impulsos/rev. programable.El interface de salida desde un punto de vista óptico está aislado y porello la salida del encoder deber estar suministrada con una fuente dealimentación de 15.24 V externa que se puede conectar a los terminales96 y 97 de la tarjeta de expansión EXP-RES.Las señales de salida del encoder están disponibles en el conector XFOcon el siguiente diagrama de conexión:
Función
Patilla 1 B- Simulación del encoder digital. Canal B -Patilla 2Patilla 3 C+ Simulación del encoder digital. Canal C +Patilla 4 C- Simulación del encoder digital. Canal C -Patilla 5 A+ Simulación del encoder digital. Canal A +Patilla 6 A- Simulación del encoder digital. Canal A -Patilla 7Patilla 8 B+ Simulación del encoder digital. Canal B +
Patilla 9 .. 15ai3307L
Designación
¡NOTA! El puente S2 y S3 de la tarjeta opcional EXP-RES debe estarDESACTIVADO.
¡NOTA! Para habilitar la simulación del encoder ajuste el parámetro del encoderRep/sim.
4.5.3 Asignaciones de conector XE1/XE (en tarjetas RV33-4NV y EXP-ABS-AVy opcional)
La conexión con el convertidor se lleva a cabo a través de dos conectoressub-D de alta densidad de 15 polos (tipo VGA):- XE en tarjeta RV33-4NV- XE1 en tarjeta EXP-ENDAT-AVy opcional

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 49
D-SUB 15 poles(on AVyL Drive)XE1 - EXP-ENDAT-AVy Card
D-SUB 15 polesXE - RV33-4NV card (on AVyL Drive)
ENDAT Encoder
XE Connector (RV33-4NV card)
Pin number Signal Description1 B- Incremental encoder B- signal2 PTC Motor thermal protection signal (referred to GND)
3 … 4 Reserved Do not connect5 A+ Incremental encoder A+ signal6 A- Incremental encoder A- signal7 GND Ground of encoder supply voltage8 B+ Incremental encoder B+ signal9 ALIM Encoder supply voltage
10 … 15 Reserved Do not connect
XE1 Connector (EXP-ENDAT-Avy card)
Pin number Signal Description1 … 10 Reserved Do not connect
11 CLK+ Encoder CLOCK+ signal12 CLK- Encoder CLOCK- signal13 DT+ Encoder DATA+ signal14 DT- Encoder DATA- signal15 Reserved Do not connect
ai3308L

50 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.6 Diagramas de conexión
Figura 4.6.1: Diagrama de conexión estándar
12 Dig.Inp. 0 (Enable)
13 D 1ig.Inp.
14 D 2ig.Inp.
19 +24 VDC
36 D 4ig.Inp.
37 D 5ig.Inp.
38 D 6ig.Inp.
39 D 7ig.Inp.
41 D 2ig.Out.
42 D 3ig.Out.
46 Supply DO
80
82
83
85
15 D 3ig.Inp.
18 0V24
16 COM DI/0
D0
ig.Out.
D1
ig.Out.
C
D
BR1
XE
MAINS3 Ph~
U1/L1
V1/L2
W1/L3
L1
K1M
F1
24
6
13
5
EMS signal
RV33 regulation board
K1M
K2M
K3MSafety contacts
Start fwd
Start rev
Mlt spd s 0
Mlt spd s 1
Mlt spd s 2
Fault reset
Drive ready
Speed is 0
DriveOK
Brakecontmon
M3 Ph~
E
R1K
78
79
PE2/
K2M
K3M
26
27
ExternalBU control
U2/T1
V2/T2
W2/T3
PE1/
EM
EM
FEXT
FEXT
Internal / Externalfan control logic (*)
D8R4expansioncard
+-
K2MK3MFR
FR(R)83 85
L01
L02
Bra
keco
ntm
on
Power Board
Brake
15
11
15
610
¡NOTA! Función lógica del control del ventilador (Sólo para tamaños deAVy2040AC4 / BR4 hasta AVy5550AC4 / BR4)
(*): - Los ventiladores siempreempezarán a funcionar cuando eldrive se habilite.- Los ventiladores se detendráncuando el drive se deshabilitedespués de un período de 300 sy la temperatura del radiador seainferior a 60 grados.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 51
4.6.1 Conexión de la tarjeta de expansiónFigura 4.6.2: Gestión de los contactores de salida comunes
414
411
412
314
311
312
D 2Xig. Out.
214
211
212
114
111
112D
0X
ig.Out.
40
39
38
37
36
COM DI 4X...7X
D 7Xig.Inp.
D 6Xig.Inp.
D 5Xig.Inp.
D 4Xig.Inp.
COM DI 0X...3X 35
34
33
32
31
D 3Xig.Inp.
D 2Xig.Inp.
D 1Xig.Inp.
D 0Xig.Inp.
O24V
+24VDC 101
100
Up cont mon
Down cont mon
K2M K3M
L00
EmergencyOFF
L01
D 1Xig. Out.
D 3Xig. Out.
D8R4 Expansion Card (optional)
Run cont mon
Door open mon
M3 Ph~
U2/T1
V2/T2
W2/T3
Output contactor configuration:
K3M
K2M
¡NOTAS! La secuencia de fase no cambia. Esta configuración se debe utilizar en los modos FOC &BRS.
Las salidas digitales de la tarjeta de expansión se deben habilitar mediante el software através del menú CONFIG E/S \ Salidas digitales \ Exp dig out en
En este ejemplo se utiliza una tarjeta de expansión, pero también se puede llevar a cabola misma funcionalidad utilizando las salidas digitales estándares.

52 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Figura 4.6.3: Gestión de los contactores de salida separados
414
411
412
314
311
312
D 2Xig. Out.
214
211
212
114
111
112D
0X
ig.Out.
40
39
38
37
36
COM DI 4X...7X
D 7Xig.Inp.
D 6Xig.Inp.
D 5Xig.Inp.
D 4Xig.Inp.
COM DI 0X...3X 35
34
33
32
31
D 3Xig.Inp.
D 2Xig.Inp.
D 1Xig.Inp.
D 0Xig.Inp.
O24V
+24VDC 101
100
Up cont mon
Down cont mon
L00
EmergencyOFF
L01
D 1Xig. Out.
D 3Xig. Out.
D8R4 Expansion Card (optional)
Run cont mon
Door open mon
K2M
K3M
L00
KGL00
M3 Ph~
KG
U2/T1
V2/T2
W2/T3
Output contactor configuration:
K3M
K2M
¡NOTAS! La secuencia de fase cambia según la dirección seleccionada. Esta configuración se puedeutilizar sólo en los modos VF & SLS.
Las salidas digitales de la tarjeta de expansión se deben habilitar mediante el software através del menú CONFIG E/S \ Salidas digitales \ Exp dig out en
En este ejemplo se utiliza una tarjeta de expansión, pero también se puede llevar a cabola misma funcionalidad utilizando las salidas digitales estándares.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 53
4.7 Protección del circuito
4.7.1 Fusibles externos para la sección de potenciaEl convertidor se debe fundir en la parte de la entrada de CA.Utilizar exclusivamente los fusibles extrarápidos.
¡NOTA! Las conexiones con inductancia de tres fases en la entrada de CA no sonesenciales pero mejoraran la vida de los condensadores de enlace de CC.
Tabla 4.7.1.1: Tipos de fusible externo para la parte de la entrada de CA
Europe USA
1007
1015
1022 25000
1030 10000
2040 25000 GRD2/20 (F4D15) or Z14GR20 (F4M07) A70P20 FWP20 (S7G48)
2055 25000 GRD2/25 (F4D16) or Z14GR25 (F4M09) A70P25 FWP25 (S7G51)
2075 10000 GRD3/35 (F4D20) or Z22GR40 A70P35 FWP35 (S7G86)
3110 25000
3150 10000
4185 … 81600 10000
1007 50000
1015 50000
1022 50000 A70P10 FWP10 (S7G49)
1030 50000
2040 50000
2055 50000 GRD2/20 (F4D15) or Z14GR20 (F4M07) A70P20 FWP20 (S7G48)
2075 50000 GRD2/25 (F4D16) or Z14GR25 (F4M09) A70P25 FWP25 (S7G51)
3110 50000
3150 50000
4185 … 4221 25000
4300 25000
4301 - 4370 25000S00üf1/80/100A/660V or M00üf01/100A/660V
(F4G18)A70P100 FWP100 (S7G55)
4371 25000 S00üf1/80/125A/660V A70P150 FWP150 (S7G56)
5450 25000
5550 25000
6750 25000
7900 25000
71100 25000
71320 25000
81600 25000TADL4120
S2üf1/110/400A/660V or M2üf1/400A/660V (F4G34) A70P400 FWP400 (S7G62)
S00üf1/80/160A/660V or M00üf01/160A/660V
(F4E15)A70P175 FWP175
S00üf1/110/250A/660V or M1üf1/250A/660V
(F4G28)A70P300 FWP300 (S7G60)
(S7G57)
(S7G48)
(S7G49)
(S7G48)
(S7G49)
Connections with three-phase reactor on AC input
25000 GRD2/10 (F4D13) or Z14GR10 (F4M03)
GRD2/16 (F4D14) or Z14GR16 (F4M05) A70P20 FWP20
A70P10
GRD2/16 (F4D14) or Z14GR16 (F4M05)
A70P10 FWP10
A70P20 FWP20
GRD2/10 (F4D13) or Z14GR10 (F4M03)
Connections without three-phase reactor on AC input
For these types an external reactor is mandatory if the AC input impedence is equal or less
than 1%
Drive type
F1 - Fuses type (code)DC link
capacitors life
time [h]
Z22GR63 (F4M17) A70P60 FWP60 (S7G88)
FWP10
Z22GR63 (F4M17) A70P60 FWP60 (S7G88)
S00üf1/80/80A/660V or Z22gR80 A70P80 FWP80 (S7G54)
Fabricantes de fusibles: Tipo GRD2... (E27), GRD3... (E33), M... (fusibles de hoja),Z14... 14 x 51 mm, Z22... 22 x 58 mm, S.... Jean Müller, EltvilleA70P... Gould ShawmutFWP... Bussmann
¡NOTA! La información técnica de los fusibles, por ejemplo, las dimensiones, pesos,disipación de calor, contactores auxiliares, se encuentran en las hojas deinformación de los fabricantes.

54 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.7.2 Fusibles externos para la parte de entrada de CC de la sección de potencia
Utilice los siguientes fusibles cuando se utilice un SR-32 Line Regen(consulte el libro de instrucciones SR-32 para más información).
Tabla 4.7.2.1: Tipos de fusibles externos para la parte de la entrada de CC
Fuses type Code Fuses type Code
1007
1015
1022 Z14GR16 F4M05 A70P20 FWP20A14F S7G48
1030 Z14GR20 F4M07 A70P20-1 FWP20A14F S7G48
2040
2055
2075 Z14GR50 F4M15 A70P50 FWP50B S7G53
3110 Z22GR63 F4M17 A70P60-4 FWP60B S7I34
3150
4185 - 4220
4221 - 4300 S00üF1/80/100A/660V F4G18 A70P100 FWP100 S7G55
4301 - 4370 S00üF1/80/125A/660V F4G20 A70P150 FWP150 S7G56
4371 - 5450 S00üF1/80/160A/660V F4E15 A70P175 FWP175 S7G57
5550 S00üF1/80/200A/660V F4G23 A70P200 FWP200 S7G58
6750 S1üF1/110/250A/660V F4G28 A70P250 FWP250 S7G59
7900 S1üF1/110/315A/660V F4G30 A70P350 FWP350 S7G61
71100 S1üF1/110/400A/660V F4G34 A70P400 FWP400 S7G62
71320 S1üF1/110/500A/660V F4E30 A70P500 FWP500 S7G63
81600 S1üF1/110/500A/660V F4E30 A70P500 FWP500 S7G63TAVy4140
USA
A70P10 FWP10A14F S7G49Z14GR10 F4M03
Drive typeEurope
S7G51
S00üF1/80/80A/660V F4M19 A70P80 FWP80 S7G54
Z14GR32 F4M11 A70P25-1 FWP25A14F
Fabricantes de fusibles: Tipo Z14..., Z22, S00 ..., S1... Jean Müller, EltvilleA70P... Gould ShawmutFWP... Bussmann
¡NOTA! La información técnica de los fusibles, por ejemplo, las dimensiones, pesos,disipación de calor, contactores auxiliares, se encuentran en las hojas deinformación de los fabricantes.
4.7.3 Fusibles internosTabla 4.7.3.1: Fusibles internos
Drive type Designation Protection of Fuse (source) Fitted on:
Power card PV33-4-"D" and higher
Power card PV33-5-"B" and higher
F1 +24V Resettable fuseRegulation card
RV33
F2RS485 serial
interfacesupply circuit
Resettable fuseRegulation card
RV33-4 and higher
6750 to
71320F3
Fanstransformer
2.5A 6.3x32(Bussmann: MDL 2.5, Gould
Shawmut: GDL1-1/2, Siba: 70 05976.2,5 , Schurter: 0034.5233)
Bottom cover (powerterminals side)
tadl0170
1007 to
81600
2A fast 5 x 20 mm (Bussmann:SF523220 or Schurter:
FSF0034.1519or Littlefuse: 217002)
4185 to
81600F1 +24V

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 55
4.8 Difusores/Filtros
4.8.1 Difusores de entrada de CASe recomienda conectar una inductancia de tres fases en la parte de entradade CA para:- limitar la intensidad RMS de entrada de los drives de la serie
ARTDriveL.- prolongar el tiempo de vida de los condensadores del enlace de CC y
la fiabilidad del rectificador de entrada.- reducir la distorsión de los harmónicos de red de CA- reducir los problemas debidos a una red de CA de baja impedancia (≤ 1%).La inductancia se puede proporcionar con un difusor de entrada de CA ocon un transformador de entrada de CA.
Tabla 4.8.1.1: Difusores de entrada de CA de tres fases
Drive type Three-phase choke type Code
1007 LR3y-1007 S7AAD
1015 LR3y-1015 S7AAE
1022 LR3y-1022 S7AAF
1030 LR3y-1030 S7AB3
2040 LR3y-2040 S7AAG
2055 LR3y-2055 S7AB5
2075 LR3y-2075 S7AB6
3110 LR3y-3110 S7AB7
3150 LR3y-3150 S7AB8
4185 - 4221 LR3-022 S7FF4
4300-4301 LR3-030 S7FF3
4370-4371 LR3-037 S7FF2
5450
5550
6750
7900
71100
71320
81600
TAVy4135
LR3-055
LR3-090
LR3-160
S7FF1
S7D19
S7D40
¡NOTA! Los valores de corriente de estos conductores (reactores) se basa en lacorriente nominal de los motores estándares listados en la tabla 2.3.2.1 enla sección 2.3.2, “Conexión de entrada/salida de CA”.
4.8.2 Difusores de salida
El drive AVy se puede utilizar con motores estándares de propósito generalo con motores diseñados especialmente para el uso del drive. Éstenormalmente tiene un mayor grado de aislamiento para soportar mejor elvoltaje de PWM.Siga el ejemplo de regulación de referencia:- Motores estándares de propósito general de bajo voltaje
VDE 0530: voltaje máximo de picos 1 kVdV/dt máx. 500 V/us
NEMA MG1 parte 30: voltaje máximo de picos 1 kVtiempo mínimo de aumento 2 us
- Motores de bajo voltaje para utilizar en los convertidoresNEMA MG1 parte 31: voltaje máximo de picos 1,6 kV
tiempo mínimo de aumento 0,1 us.

56 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Los motores diseñados para ser utilizados con drives de frecuencia ajustableno requieren ningún filtro específico de la forma de onda del voltaje deldrive. Para motores de propósito general y utilizando drives de hasta eltamaño 2075, que funcionan con cable especialmente largo (generalmentesuperior a 100 m [328 pies]) se recomienda un difusor de salida paramantener la forma de onda del voltaje dentro de los límites especificados.Los valores de los difusores sugeridos y los números de la parte estánlistados en la tabla 5.7.2.1.La corriente nominal de los filtros debería ser aproximadamente 20%superior a la corriente nominal del drive de frecuencia para tener en cuentalas pérdidas adicionales debidas a la forma de onda PWM.
Tabla 4.8.2.1: Difusores de salida recomendados
Drive type Three-phase choke type Code
1007
1015
1022
1030
2040
2055
2075
3110
3150 LU3-015 S7FM2
4185 - 4221 LU3-022 S7FH3
4300 - 4301 LU3-030 S7FH4
4370 - 4371 LU3-037 S7FH5
5450
5550
6750
7900
71100
71320
81600TAVy4150
LU3-011
S7FG2
S7FG3
S7FG4
LU3-003
LU3-005
LU3-055
LU3-090
LU3-160
S7FH6
S7FH7
S7FH8
¡NOTA! Cuando el drive funciona con la corriente nominal y a 50 Hz, los difusoresde salida provocan una caída de voltaje de aproximadamente el 2% delvoltaje de salida.
4.8.3 Filtros de supresión de interferencias
Los convertidotes de la serie Avy deben estar equipados con un filtro EMIexterno para así reducir las emisiones de radiofrecuencias en la línea dered. La selección de filtro depende del tamaño del drive y del entorno de lainstalación. Con esta finalidad consulte el libro de instrucciones de“Directrices EMC”En la Guía también se indica como instalar el armario (conexión del filtro yde los reactores de red, del cable blindado, de la puesta a tierra, etc.) con talde hacer que la EMC cumpla con la directiva de la EMC 89/336/EEC. Eldocumento describe la situación actual referente a los estándares de la EMCy las pruebas de conformidad realizadas en los drives GEFRAN-SIEI.
¡NOTA! Para el uso de los filtros sinusoidales de salida, contacte con fábrica.

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 57
4.9. Unidades de frenado
En la operación de regeneración o sobresíncrona, el motor de tres fases defrecuencia controlada facilita energía al circuito de enlace de CC medianteel drive. Esto crea un aumento en el voltaje intermedio del circuito.Las unidades de frenado (BU), por lo tanto, se utilizan para evitar que elvoltaje de CC se eleve a un valor no permitido. Cuando se utilizan, activanuna resistencia de frenado que se conecta en paralelo a los condensadoresdel circuito intermedio. La energía de realimentación se convierte en calormediante la resistencia de frenado (RBR), así proporciona tiempos dedeceleración muy cortos y un funcionamiento restringido a cuatrocuadrantes.
Figura 4.9.1: Funcionamiento con la unidad de frenado (Principio)
E
3M
_R
BR
BU
UZK
Los drives con tamaños de 1007 hasta 3150 tienen, como configuraciónestándar, una unidad de frenado interna. Los drives de los tamaños 4220hasta 5550 pueden tener una unidad de frenado interna opcional (consultela sección 2.1.2 “Designación del tipo del convertidor”) montada de fábrica.Todos los drives AVy... estándares pueden disponer de una unidad de frenadoexterna (BU-32... o BUy) conectada a los terminales C y D.
¡NOTA! ¡Cuando existe la unidad de frenado interna, o cuando los terminales C y Dde los circuitos están conectados a dispositivos externos, la entrada de CAdebe estar protegida con fusibles semiconductores súper rápidos! Observelas instrucciones relacionadas con el montaje.Para la conexión de la resistencia de frenado (terminales BR1 y C) debeutilizarse un cable de par trenzado. En el caso de que la resistencia defrenado se suministre con protección térmica (klixon), puede conectarse ala entrada del drive “External fault”.
Las resistencias de frenado pueden estar sujetas a sobrecargas impredeciblesdebidas a posibles fallos. Los reóstatos tienen que estar protegidos con losdispositivos de protección térmica.Estos dispositivos no tienen que interrumpir el circuito donde se haintroducido la resistencia pero su contacto auxiliar debe interrumpir la fuentede alimentación de la sección de alimentación del drive.En el caso de que el reóstato prevea la presencia de un contacto deprotección, este contacto se tiene que utilizar junto con el que perteneceal dispositivo de protección térmica.

58 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.9.1 Unidad de frenado interna
La unidad de frenado interna se incluye como estándar (hasta el tamaño 3150). Elreóstato de frenado es opcional y siempre se tiene que montar en el exterior. Paraajustar el parámetro consulte la lista de parámetros. La siguiente figura muestra laconfiguración para el funcionamiento de la unidad de frenado interna.
Figura 4.9.1.1: Conexión con la unidad de frenado interna y el reóstato de frenado externo
Bra
king
resi
stor
M3Ph~
PE
1/
U1/L
1
V1/L
2
W1/L
3
BR
1
U2/T
1
V2/T
2
W2/T
3
C D
PE
2/
F1
BrakingUnit
4.9.2 Listas e información técnica de las resistencias estándaresexternas
Resistencias recomendadas para utilizar con la unidad de frenado interna:Tabla 4.9.2.1: Listas e información técnica de las resistencias estándares externas
Inverter Resistor PNBR RBR EBR
Type Type [kW] [Ohm] [kJ]
1007 MRI/T600 100R 0.6 100 221015
1022
1030
2040
2055
2075
3110 MRI/T1300 49R 1.3 49 483150 MRI/T2200 28R 2.2 28 82
4185 - 4221 MRI/T4000 15R4 4 15.4 1504300 - 4301 MRI/T4000 11R6 4 11.6 1504370 - 4371 MRI/T4000 11R6 4 11.6 150
5450 MRI/T8000 7R7 8 7.7 2205550 MRI/T8000 7R7 8 7.7 220
TADL0250
MRI/T900 68R 0.9 68 33
Descripción de los parámetros:PNBR Potencia nominal de la resistencia de frenadoRBR Valor de la resistencia de frenadoEBR La energía máxima de sobretensión se puede disipar con la
resistenciaPPBR Potencia de pico aplicada a la resistencia de frenadoTBRL Tiempo máximo de frenado en condición del ciclo de funcionamiento
límite (potencia de frenado = PPBR con perfil triangular típico)
T = 2BRL
EBR
PPBR
=[s]

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 59
Figura 4.9.2.1: Ciclo de frenado de funcionamiento límite con perfil de potenciatriangular típico
TCL
n,P
PPBR
TBRL
n
EBR
t
TCL Tiempo de ciclo mínimo en condición del ciclo defuncionamiento límite (potencia de frenado = PPBR con perfiltriangular típico)
T =CL TBRL
PPBR
PNBR
=[s]1
2
La alarma de sobrecarga de la BU se produce cuando el ciclo de trabajo excede lainformación máxima permitida con tal de evitar los posibles daños en la resistencia.
Modelo de resistencia: Información de la resistencia estándar
Ejemplo de código: MRI/T900 68RMRI = tipo de resistencia900 = potencia nominal (900 W)T= con termostato de seguridad68R = valor de la resistencia (68 ohmios)
¡NOTA! El equilibrio sugerido del modelo de resistencia y el tamaño del convertidor permiteun final de frenado en el par nominal con un ciclo de trabajo TBR / TC = 20%
Donde: TBR = Tiempo de frenado, TC = Tiempo del ciclo
Figura 4.9.2.2: Ciclo de frenado con TBR / TC = 20%
TC
P,n
TBR
n
t

60 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
La resistencia estándar se puede utilizar para los acoplamientos, a diferenciade los mencionados anteriormente. Estas resistencias, cuya informacióntécnica está especificada en la tabla 5.8.2.1, tienen unas dimensiones quetoleran una sobrecarga igual a 4 veces su potencia nominal por 10 segundos.Encualquier caso, también pueden tolerar una sobrecarga, cuya disipación deenergía es la misma que el nivel de potencia máximo definido por:
P =PBR
V [V]BR2
R [ohm]BR
=[w]
Donde: VBR = umbral de la unidad de frenado (consulte la tabla 4.9.2.2)Con referencia a la figura 4.9.2.3, donde el perfil de potencia es el triangulartípico, se puede tener en cuenta el siguiente ejemplo (consulte también latabla 4.9.2.1).
Modelo de resistencia: MRI/T600 100R
Potencia nominal PNBR = 600 [W]Energía máxima EBR = 4 x 600[W] x 10[s] = 24000[J]Fuente de red del convertidor = 460VUmbral de voltaje: VBR =780V
TBRL = 2EBR
PPBR
=24000
6084= 7.8[s]2PPBR =
VBR
RBR
2
=780
100
2
= 6084 [W]
Es necesario tener en cuenta la siguiente relación:
A) Si TBR ≤≤≤≤≤ EBR / PNBR verifique:1) PMB ≤≤≤≤≤ 2 * EBR / TBR Donde: PMB es el promedio de la potencia
del ciclo (consulte la fig. 4.9.2.3)
2)P .MB TBR
2 TC
PNBR
El promedio de la potencia del ciclo no debe ser superior a lapotencia nominal de la resistencia.
B) Si TBR >>>>> EBR / PNBR es decir, en caso de un tiempo de frenadomuy prolongado, debe dimensionarse PMB ≤ ≤ ≤ ≤ ≤ PNBR
Figura 4.9.2.3: Ciclo de frenado genérico con perfil triangular
TC
n,P
PPBR
TBR t
PMB

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 61
Si no se respecta una de las normas mencionadas anteriormente, esnecesario incrementar la potencia probada de la resistencia, respetandoel límite de la unidad de frenado interna (mencionado en la tabla 4.9.2.3),o una BU externa si es necesario. Para proteger estas resistencias de unapeligrosa sobrecarga, también está disponible la lógica de control de lasobrecarga del software (STARTUP / Startup config / BU protection).Los parámetros por defecto en el drive coinciden con el recorte de laresistencia recomendado en la tabla 4.9.2.1.Para la resistencia de recorte no estándar consulte “STARTUP / Startupconfig / BU protection.
Tabla 4.9.2.2: Umbrales de frenado para diferentes redes
Mains voltageBraking threshold
VBR [V]
230Vac 400400Vac 680
460Vac/480Vac 780avy4200
Cuando el ciclo de trabajo excede la información introducida, se produceautomáticamente la sobrecarga de la BU de alarma con tal de evitar losposibles daños en la resistencia. La siguiente tabla se puede utilizar paraelegir una resistencia externa, diferente a las series de estándares.
Tabla 4.9.2.3: Información técnica de las unidades de frenado internasInverter Minimum
type IRMS IPK T RBR
[A] [A] [s] [ohm]
1007
1015
1022
1030
2040
2055
2075
3110 12 22 17 363150 17 31 16 26
4185 … 4221 18 52 42 154300 - 4301 37 234370 - 4371 29 37
5450
5550
6750
7900
71100
71320
81600
Tavy4210
External braking unit (optional)
1078
50 104 22 7.5
67
4.1
6.6
7.8
12
19
16
100
IRMS Corriente nominal de la unidad de frenadoIPK Corriente de pico suministrable para un máximo de 60 segundosT Tiempo de ciclo mínimo para un trabajo en IPK para 10 segundos

62 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
Generalmente se deben satisfacer las siguientes condiciones:
IRMS1 P TPBR BR
TRBR C2. .
Cada drive dispone de los terminales 26 y 27 que permiten el control deuna o más unidades de frenado externas, conectadas en paralelo. El driveactuará como Master y las unidades de frenado externas BU32 o BUydeben configurase como Slave.Así será posible utilizar la protección I2 t interna.Si se utiliza más de una BU, se tendrá que conectar cada BU a una únicaresistencia. Todas las unidades de frenado tendrán que ser del mismomodelo y tener el mismo tipo de resistencia.
4.10 Proteger la fuente del regulador
La fuente de alimentación de la sección de control está proporcionada poruna unidad de alimentación del modo conmutado (SMPS) del circuito deenlace de CC. El drive se deshabilita tan pronto como el voltaje del circuitode enlace de CC se encuentra por debajo del valor del umbral (UBuff). Lafuente del regulador está protegida por la energía del circuito de enlace deCC hasta que se consigue el valor límite (Umin). El tiempo de búfer estádeterminado por la capacitancia de los condensadores de enlace de CC.Los valores mínimos se muestran en la siguiente tabla. El tiempo de búfer(tBuff) se puede ampliar (sólo en drives de 11 kW y superiores) conectandocondensadores externos en paralelo (en los terminales C y D).
Tabla 4.10.1: Tiempo de búfer del enlace de CC
Buffer time tBuff Maximum Maximum
Internal (minimum value) with the permissible power required
Inverter type capacitance internal capacitance at : external by switched
AC Input AC Input AC Input capacitance mode power
Cstd voltage =230V voltage =400V voltage =460V supply
[µF] [s] [s] [s] Cext [µF] PSMPS [W]
1007 220 0.02 0.165 0.25 0 65
1015 220 0.02 0.165 0.25 0 65
1022 330 0.03 0.24 0.37 0 65
1030 330 0.03 0.24 0.37 0 65
2040 830 0.08 0.62 0.95 0 65
2055 830 0.08 0.62 0.95 0 65
2075 830 0.08 0.62 0.95 0 65
3110 1500 0.28 1.12 1.72 1500 65
3150 1500 0.28 1.12 1.72 1500 654185 ... 4221 1800 0.58 1.54 2.3 4500 704300 - 4301 2200 0.62 1.88 2.8 4500 704370 - 4371 3300 0.72 2.83 4.2 4500 70
5450 4950 0.87 4.24 6.3 4500 705550 4950 0.87 4.24 6.3 4500 706750 6600 0.61 5.6 8.1 0 707900 6600 0.61 5.6 8.1 0 70
71100 9900 0.91 8.4 12.1 0 7071320 14100 1.30 12.8 17.2 0 7081600 14100 1.30 12.8 17.2 0 70
avy4220L
SMPS = Switched Mode Power Supply

ARTDriveL Manual de instrucciones Capitolo 4 - Conexión eléctrica • 63
Figura 4.10.1: Proteger la fuente del regulador mediante condensadores de circuitointermedio adicionales
3Ph~
PE
1/
U1
/L1
V1
/L2
W1/L
3
BR
1
U2
/T1
V2
/T2
W2/T
3
C D
PE
2/
F1
1
Cx
1
C1x
1
C2x= +
C 900 V orX DC
¡NOTA! ¡Cuando se conecten los terminales C y D del circuito intermedio, la partede la entrada de CA debe estar protegida con fusibles semiconductoressúper rápidos!
Fórmula para calcular el tamaño de los condensadores externos:
fA018
Cext =2 P SMPS t Buff 10 6
U2Buff - U2
min
- Cstd
Cext, Cstd [μF]PSMPS [W] UBuff = 400 V en ULN = 400 VtBuff [s] UBuff = 460 V en ULN = 460 VUBuff, Umin [V] Umin = 250 V
Ejemplo de cálculoUn drive AVy4220 funciona con una fuente de entrada de CA ULN = 400V. Se requiere un búfer de fallo de voltaje para un máximo de 1,5 s.
PSMPS 70 W tBuff 1.5 sUBuff 400 V Umin 250 VCstd 1800 μF
C ext =
(400 V) 2 - (250 V) 2- 1800F = 2154 F - 1800 F = 354F
2 . 70 W . 1.5 s . 10 F / F6

64 • Capitolo 4 - Conexión eléctrica ARTDriveL Manual de instrucciones
4.11 Tiempo de descarga del enlace de CC
Tabla 4.11.1: Tiempo de descarga del enlace de CC
Type I2N Time (seconds) Type I2N Time (seconds)
1007 2.1 4300 - 4301 58 601015 3.5 4370 - 4371 76 901022 4.9 5450 901030 6.5 5550 1102040 8.3 6750 1422055 11 7900 1802075 15.4 71100 2103110 21.6 71320 2503150 28.7 81600 310
4185 - 4221 42 60 Tavy4250
120
90
150
205
220
Este es el tiempo mínimo que debe transcurrir cuando un drive AVy sedesconecta de la entrada de CA antes de que un operador pueda reparar loscomponentes internos del drive para evitar el peligro de descargas eléctricas.
CONDICIÓN El valor considera que el tiempo para que un drive se desactive es de 480Vac+10%, sin ninguna opción (la carga para la fuente de conmutación es latarjeta de regulación, el teclado y los ventiladores de 24Vdc “si estáninstalados”).El drive se deshabilita. Esto representa el peor de los casos.

ARTDriveL Manual de instrucciones Capítulo 5 - Descripción del interface serie RS 485 • 65
Capítulo 5 - Descripción del interface serie RS 485
La línea serie RS 485 permite transmitir los datos mediante un par de cablesformado por dos conductores simétricos, en espiral con una pantalla común.Para la velocidad de transmisión de 38,4 kbaudios, la distancia máxima detransmisión es 1200 metros. La transmisión se produce con una señaldiferencial. La línea serie RS 485 permite transmitir y recibir, pero nosimultáneamente (funcionamiento en modo semidúplex). Mediante el enlaceRS 485 pueden conectarse hasta 31 accionamientos AVy (puedenseleccionarse hasta 128 direcciones). La configuración de la dirección serealiza mediante el parámetro Slave address.Particularidad acerca de la transmisión de los parámetros, su tipo y el rangode los valores se muestran en la sección 9,2 menú COMMUNICATION /RS485.
Figura 5.1: Linea serie RS485
12345
9 8 7 6
150 R
TxA/RxATxB/RxB
0 V S
+5 V S
S5 S6
PE
RS485
XS
100
R
470
R
470
R
+5 V
S41
S40
En los inverters de la serie AVy, la línea serie RS 485 está preparada medianteun conector de 9 polos SUB-D (XS) colocado en la tarjeta de regulación. Lacomunicación puede realizarse con o sin un aislamiento galvánico: utilizandoel aislamiento galvánico es necesaria una alimentación externa de +5V.La señal diferencial se transmite a través de la patilla 3 (TxA/RxA) y la patilla7 (TxB/RxB). Al inicio y al final de la conexión física de la línea serie RS 485deben estar presentes y conectadas las resistencias de terminación, para evitarla reflexión en los cables.En los equipos de la serie ARTDriveL, las resistencias de terminación seactivan con la inserción de los puentes S5 y S6. Esto permite una conexiónpunto a punto con un PLC o bien con un PC.

66 • Capítulo 5 - Descripción del interface serie RS 485 ARTDriveL Manual de instrucciones
¡NOTA! Tener presente el hecho de que sólo el primero y último componente de lacadena de una línea serie RS 485 deben tener colocada la resistenciaterminadora S5 y S6, respectivamente. En todos los demás casos, (dentrode una cadena) no deben estar insertados los puentes S5 y S6.Con S40 y S41 montados el drive suministra línea serie. Esta modalidadestá permitida en conexiones punto a punto sólo sin aislamiento galvánico.
¡NOTA! Empleando el interface “PCI-485” puede realizarse una conexión punto apunto sin tener que colocar ningún puente (Montados S40 y S41).En la conexión Multidrop (dos o más inverters) es necesaria la alimentaciónexterna (patilla 5 / 0V y patilla 9 / +5V).Las patillas 6 y 8 son para uso exclusivo del interface “PCI-485”.
Para la conexión de una línea serie, asegurarse de que:- se han empleado únicamente cables apantallados- los cables de potencia y los cables de mando de los contactores y relés
están en canales separados.
Puede seleccionar el protocolo de comunicación entre Slink4, Modbus,Jbus, ISO 1745 o Hiperface por medio del parámetro “Protocol type”(COMMUNICATION / RS 485 / Tipo de protocolo).
5.1 Descripción del conecor pr la línea serie RS485
Tabla 5.1.1: Disposición del conector XS para la línea serie RS485
Designación Función I/O Interface
PIN 1 Uso interno – –PIN 2 Uso interno – –PIN 3 RxA/TxA I/O RS485PIN 4 Uso interno – –PIN 5 0V (Masa para 5 V) – AlimentaciónPIN 6 Uso interno – –PIN 7 RxB/TxB I/O RS 485PIN 8 Uso interno – –PIN 9 +5 V – Alimentación
ai4110
I = Entrada O = Salida

ARTDriveL Manual de instrucciones Capítulo 6 – Funcionamiento del teclado • 67
Capítulo 6 – Funcionamiento del teclado
El teclado está compuesto de una pantalla LCD con dos líneas de 16 dígitos,siete LEDs y nueve teclas de funciones. Se utiliza:- para iniciar y detener el drive (esta función se puede deshabilitar)- para visualizar la velocidad, el voltaje, los diagnósticos, etc. durante el
funcionamiento- para ajustar parámetros e introducir órdenesEl módulo LED está compuesto de 6 LEDs. Se utiliza para visualizar lainformación del estado y del diagnóstico durante el funcionamiento. Elteclado y el módulo LED también se pueden instalar o eliminar mientras eldrive está funcionando.
-Torque +Torque Alarm Enable ZeroSpeed Limit
-Torque Negative torque current
+Torque Positive
Alarm Alarm condition
Enable Drive enable status
ZeroSpeed Speed <=zero speed threshold
Limit Actual current >=current limit
torque current
This monitoring module can be upgraded with the keypad with
alphanumeric LCD display
¡NOTA! Se debe proteger el cable del teclado de reposición de más de 20 cm.
6.1 LEDs y teclas
Los LEDs que aparecen en el teclado se utilizan para diagnosticarrápidamente el estado de funcionamiento del drive.
Designación Color Función
-Par amarillo el LED se ilumina cuando el drive funciona con un par negativo+Par amarillo el LED se ilumina cuando el drive funciona con un par positivo
ALARMA rojo el LED se ilumina cuando el drive señala una desconexiónACTIVAR verde el LED se ilumina cuando el drive está activado
Velocidad cero amarillo el LED se ilumina cuando la velocidad del motor es ceroLímite amarillo el LED se ilumina cuando el drive funciona al límite de corriente
Cambio amarilloel LED se ilumina cuando las segundas funciones del teclado están
desactivadasts030

68 • Capítulo 6 – Funcionamiento del teclado ARTDriveL Manual de instrucciones
Teclas decontrol
Jog
Help
Alarm
Escape
Home
Enter
Shift
Referencia del texto
[START]
[STOP]
[Increase] / [Jog]
[Decrease] / [Rotation control]
[Down arrow] / [Help]
[Up arrow] / [Alarm]
[Left arrow] / [Escape]
[Enter] / [Home]
[Shift]
Función
La tecla START hace que el drive se activey se pongaen marcha (Selección del comando = tecla I O).
La tecla STOP hace que se detenga y se desactive(Selección del comando = tecla I O) la tecla Stoptambién reajusta el secuenciador después de una alarma.
El mando del motor y las funciones Jog no estándisponibles en la versión ARTDriveL.
El mando del motor y las funciones Jog no estándisponibles en la versión ARTDriveL.
Se utilizan para desplazarse hacia abajo por los elementos delmenú en la navegación del menú, por las listas de selección enlos selectores, o por los valores digitales en la ediciónnumérica.Después de pulsar la tecla shift, aparece un menú deinformación de un elemento específico si se da el caso. El menúHelp se puede examinar con las flechas arriba/abajo. La flechade la izquierda regresa al modo normal.Se utilizan para desplazarse hacia arriba por los elementos delmenú en la navegación del menú, por las listas de selección en losselectores, o por los valores digitales en la ediciónnumérica.Después de pulsar la tecla Shift, aparece el modo devisualización de la lista de alarmas. Las alarmas activadas y lasalarmas pendientes de reconocimiento se pueden examinar conlas flechas de arriba/abajo. Las alarmas se pueden reconocer conla tecla Enter. La flecha de la izquierda regresa al modo normal.Se utilizan para subir un nivel en la navegación del menú; paradesplazar dígitos en el modo de edición numérico, para regresaral modo normal desde la lista de alarmas o los modos deayuda.Después de pulsar la tecla shift, se utiliza para escapar dela edición numérica o la selección sin realizar ningún cambio.
Se utilizan para bajar un nivel en la navegación del menú; paraintroducir selecciones o valores numéricos después de la edición,para dar órdenes, para reconocer alarmas en el modo de la listade alarmas. Función segunda Home, regresar al menú Monitordesde cualquier nivel de menú.
El botón Shift habilita las segundas funciones delteclado (Rotation control, Jog, Help, Alarm, Escape,Home)

ARTDriveL Manual de instrucciones Capítulo 6 – Funcionamiento del teclado • 69
6.2 Moverse dentro de un menú
. . . . . . . . . . . ... . . . . . . . . . . . . . .
MAIN MENU
R: S:
MONITOR
STARTUP
TRAVEL
SERVICE
OUTPUT VOLT AGE
340V
STARTUP
Regulation mode
Startup config
STARTUP
Save config?
Busy
Please wait
Enter to MONITOR menu
Escape from MONITORScroll
down
Scroll
up
Enter to
STARTUP menu
Escape from
STARTUP
Enter forSAVE PARAMETERS
Escape from
STARTUP
R: S:
R: S:
R: S:
STARTUP
6.3 Utilizar la Ayuda del teclado
R: S:MONITOR
STARTUP
Output voltage
0 V
Output current
0.00A
SHIFT + HELP
Help max value
0.000
Help min value
Help mode ZUSWR
---11
R: S:0.000

70 • Capítulo 6 – Funcionamiento del teclado ARTDriveL Manual de instrucciones
6.4 Menú principal del drive
R: S :
MONITOR
R: S :
STARTUP
R: S :
TRAVEL
R: S :
REGULATION PARAM
R: S :
I/O CONFIG
R: S :
ALARM CONFIG
R: S :
COMMUNICATION
R: S :
APPL CARD CONFIG
R: S :
CUSTOM FUNCTIONS
R: S :
SERVICE
PasswordLEVEL 1
PasswordLEVEL 2
* El menú SERVICE permite ajustar la contraseña para habilitar los menús del drive del nivel 1:12345. Para tener acceso a los menús del drive del nivel 1, edite la contraseña 12345 en elparámetro «Insert Password» y confírmela con el botón «Enter».
¡NOTA! La contraseña del nivel 1 debe editarse con cada reciclado del drive
Estados variables del drive
Configuración inicial del drive y delmotor, Información mecánica delascensor
Parámetros del ascensor
Ganancia del regulador yparámetros de control
Entrada/Salida yconfiguraciones de los comandos
Configuraciones de alarma
Enlace en serie, tarjeta decomunicación
Configuraciones de la tarjeta deaplicación
Área de bloques programables delos bloques de comparación deseñal & configuraciones de PAD
Menú de servicio con contraseña *

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 71
Seleccione el modo deregulación
Configure la informacióndel drive
Configure la informacióndel motor
Ponga en marcha laregulación automáticadel motor
Configure toda lainformación mecánicadel sistema
Configuración del tipo deencoder
LEl drive sale de fábrica con control V/f, cambia al controldel vector con orientación de campo.
Diríjase al modo Setup para la parametrización de lainformación del drive:Voltaje de la red, temperatura delambiente, frecuencia de conmutación, resolución dereferencia de velocidadDiríjase al modo Setup para la parametrización de lainformación del motor: Voltaje nominal, frecuencianominal, corriente nominal, velocidad nominal, potencianominal, Cosphi
El procedimiento de regulación automática es una medidareal de los parámetros del motor; hay dos opcionesdisponibles:- “Complete still” puede utilizarse cuando el motor estáacoplado a la caja de velocidades y la cabina está instalada.Puede originar una rotación del eje limitada cuando no seaplica el freno.- “Complete rot” puede utilizarse cuando el motor no estáacoplado o la caja de velocidades no representa más del5% de carga y la cabina no está instalada. Hace que larotación del eje del motor se acerque a la velocidad nominal.
Información mecánica del sistema:Radio de la caja develocidades, diámetro de polea, velocidad a gran escala.
- 6.1: Realimentación desde el encoder conectado alconector XE de la tarjeta de regulación- 6.2: Realimentación desde el encoder conectado alconector XFI de la tarjeta opcional EXP-...
Paso
Capítulo 7 – Pruebas finales mediante el tecladoEl ARTDrive Lift puede funcionar con el control avanzado de frecuencia/voltaje (por defecto), el control del vector sin sensor (de bucle abierto), elcontrol del vector con orientación de campo (de bucle cerrado) y sinescobillas.Todos los modos de regulación tienen sus propios ajustes deparámetros independientes.Una prueba final ejecutada en un modo debería repetirse o transferirse aotro modo de regulación.
7.1 Pruebas finales para AVy...AC / AC4 (Motores asíncronos)
Procedimiento de configuración de pruebas finales
1
2
3
4
6.1
6.2
5
Modo de bucle cerrado - con orientación de campo (consulte el capítulo 7.1.1)
Función Descripción
Consulte los pasos del 6 al 9 del capítulo 7.1.3
o

72 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Función DescripciónPaso
Seleccione el modo deregulación
Modo de bucle abierto - de vector sin sensor (consulte el capítulo 7.1.2)
1
Consulte los pasos del 2 al 9 del capítulo 7.1.3
Función DescripciónPaso
El drive sale de fábrica con control V/f.
Diríjase al modo Setup para la parametrización de la informacióndel drive:Voltaje de la red, temperatura del ambiente y frecuenciade conmutación.
Diríjase al modo Setup para la parametrización de la informacióndel motor: Voltaje nominal, frecuencia nominal, corrientenominal, velocidad nominal, potencia nominal, Cosphi.
El procedimiento de regulación automática es una medida realde los parámetros del motor; hay dos opciones disponibles:- “Complete still” puede utilizarse cuando el motor estáacoplado a la caja de velocidades y la cabina está instalada.Puede originar una rotación del eje limitada cuando no seaplica el freno.- “Complete rot” puede utilizarse cuando el motor no estáacoplado o la caja de velocidades no representa más del 5% decarga y la cabina no está instalada. Hace que la rotación del ejedel motor se acerque a la velocidad nominal.
Información mecánica del sistema:Radio de la caja develocidades, diámetro de polea, velocidad a gran escala.
Información de los pesos del sistema:Peso de la cabina, pesodel contador, peso de la carga, peso de la cuerda, inercia delmotor, inercia de la caja de velocidades.
Parámetros de la unidad de frenado: Tipo de unidad de frenado(interna / externa), resistencia de la unidad de frenado, potenciade la unidad de frenado.
Una combinación binaria de tres entradas digitales permiteseleccionar hasta 8 puntos de ajuste de la velocidad diferentes.
La sacudida de las aceleraciones y deceleraciones puedenajustarse en el perfil de la rampa.
Activado
Configure lainformación del drive
Configure lainformación del motor
Ponga en marcha laregulación automáticadel motor
Configure toda lainformación mecánicadel sistemaConfigure toda lainformación del pesodel sistema
Configure losparámetros de launidad de frenado
Configure el perfil de lavelocidad
Configure el perfil de larampa
Modo de control V/f (consulte el capítulo 7.1.3)1
2
3
4
5
6
7
8
9
El drive sale de fábrica con control V/f, selección delmodo del vector sin sensor.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 73
¡NOTA! El siguiente procedimiento de inicio del drive toma como ejemploun drive AVy4220-KBL-AC4 (revision de software 3.300).
7.1.1 Modo con orientación de campo
Puesta en marcha del drive. Esta operación durará unos 10 segundos y eldrive visualizará (los LEDs parpadean como test):
⎡ ⎤AC Drive LiftStartup...⎣ ⎦
después de 10 segundos⎡ ⎤R: 0 S: 0
MONITOR⎣ ⎦
⎡ ⎤R: 0 S: 0STARTUP⎣ ⎦
¡NOTA! Con respeto a la apertura del menú STARTUP, el drive aparece en elmodo de parametrización.
⎡ ⎤STARTUPStartup config⎣ ⎦
⎡ ⎤STARTUPRegulation mode⎣ ⎦
⎡ ⎤Regulation modeV/f control⎣ ⎦
⎡ ⎤Select new modeV/f control⎣ ⎦
⎡ ⎤Select new modeField oriented⎣ ⎦
Pulse para confirmar la base de datos del modo de regulaciónseleccionada.
⎡ ⎤Transfer param ?Yes->Ent No->Esc⎣ ⎦
Pulse para transferir los parámetros desde el anterior modo deregulación al nuevo modo de regulación seleccionado. Esta operaciónresulta adecuada sólo si algunos parámetros han sido ajustados en elanterior modo de regulación. En caso contrario, pulse Esc para no transferir
1
Configuración delmodo con
orientación decampo

74 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
parámetros. El drive reiniciará en el nuevo modo de regulación, esteproceso durará unos 5 segundos:
⎡ ⎤RestartPlease wait⎣ ⎦
entonces⎡ ⎤STARTUP
Regulation mode⎣ ⎦
Desplace y
⎡ ⎤STARTUPStartup config⎣ ⎦
El drive mostrará:⎡ ⎤Startup config
Enter setup mode⎣ ⎦
entonces pulse . El drive reiniciará el menú SETUP MODE, espereunos segundos, aparecerá una secuencia de mensajes:
⎡ ⎤RestartPlease wait⎣ ⎦
poi⎡ ⎤SETUP MODE
Drive data⎣ ⎦
Pulse y ajuste los parámetros de la información del drive:
⎡ ⎤SETUP MODEDrive data⎣ ⎦
⎡ ⎤Mains voltage400 V⎣ ⎦
Pulse o para seleccionar la tensión de entrada de la CA de lasiguiente lista: 460 - 440 - 415 - 400 - 380 - 230V, pulse paraconfirmar. Si es necesario, también es posible cambiar: Temperaturaambiente y frecuencia de conmutación.
⎡ ⎤Ambient temp40° C⎣ ⎦
2
Configure lainformación del
drive

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 75
⎡ ⎤Switching freq8 KHz⎣ ⎦
⎡ ⎤Spd ref/fbk res0.250 rpm⎣ ⎦
Pulse o para seleccionar un valor de resolución de velocidadbasado en la velocidad máxima del motor.Por ejemplo: si la velocidad nominal es de 1460 rpm, ajuste 0,125 rpm(consulte la tabla)
Resolución de velocidad Valor máximo de velocidad(Spd ref/fbk res)
0.125 rpm 2048 rpm0.25 rpm 4096 rpm0.5 rpm 8192 rpm1 rpm 16384rpm
0.03125 rpm 512 rpm
⎡ ⎤Spd ref/fbk res0.125 rpm⎣ ⎦
Pulse para confirmar la selección.
Pulse para salir de la información del drive. El drive mostrará:
⎡ ⎤BusyPlease wait ...⎣ ⎦
poi⎡ ⎤SETUP MODE
Drive data⎣ ⎦
¡NOTA! Si se han realizado cambios en los parámetros del menú de lainformación del drive, con esta operación, los valores internos deldrive se calcularán y aparecerán los resultados de la regulaciónautomática.

76 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Configure los parámetros de la placa del motor en el menú de informacióndel motor (los valores aceptados dependen del tamaño del drive):
⎡ ⎤SETUP MODEMotor data⎣ ⎦
⎡ ⎤Rated voltage380.00 V⎣ ⎦
para editar el voltaje del motor. Para confirmar el nuevo valor pulse
, para cancelar la edición pulse + Escape
o desplace hasta:
⎡ ⎤Rated frequency50.00 Hz⎣ ⎦
para editar la frecuencia del motor, para confirmar el nuevo valor pulse .
⎡ ⎤Rated current43 A⎣ ⎦
para editar la corriente del motor, para confirmar el nuevo valor pulse .
¡NOTA! El valor no debería ser inferior a aproximadamente 0,3 veces lacorriente nominal del drive, la corriente de salida de la clase 1 @400Vde la placa del drive.
⎡ ⎤Rated speed1460.00 rpm⎣ ⎦
para editar la velocidad del motor, para confirmar el nuevo valor pulse .
¡NOTA! El valor es la velocidad de carga completa del motor a la frecuencianominal. Si en la placa del motor está disponible el desplazamiento,ajuste el parámetro Rated speed de la siguiente manera:Rated speed = Velocidad síncrona – Desplazamiento
⎡ ⎤Rated power22 kW⎣ ⎦
para editar la potencia del motor, para confirmar el nuevo valor pulse .
¡NOTA! Para una placa de motor medida en HP, configure la potencia nominalkW = 0,736 x velocidad Hp del motor.
3
Configure lainformación del
motor

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 77
⎡ ⎤Cosfi0.85⎣ ⎦
para editar la phi del cos del motor (factor de potencia), para confirmar
el nuevo valor pulse .
¡NOTA! Deje el valor por defecto para la phi del Cos ϕ en el caso que lainformación no esté disponible en la placa.
⎡ ⎤Efficiency91.20 %⎣ ⎦
para editar la eficiencia del motor, para confirmar el nuevo valorpulse .
¡NOTA! Deje el valor por defecto para la eficiencia en el caso que lainformación no esté disponible en la placa.
Pulse para salir de la información del motor; durante algunos segundos
el drive mostrará:⎡ ⎤Busy
Please wait ...⎣ ⎦entonces
⎡ ⎤SETUP MODEMotor data⎣ ⎦
¡NOTA! Si se han realizado cambios en los parámetros del menú de lainformación del motor, con esta operación, los valores internos deldrive se calcularán y aparecerán los resultados de la regulaciónautomática. Si la operación genera cualquier mensaje de error oaparece algún led de alarma, compruebe la consistencia de losparámetros del motor e inténtelo de nuevo o consulte la sección 10,Solucionar problemas.
Desplace para ejecutar el procedimiento de regulación automática;para este procedimiento se pueden utilizar dos opciones: “Complete still”o “Complete rot”.
¡NOTA! Cuando el motor está acoplado a la caja de velocidades y el ascensorestá instalado, utilice “Complete still” (motor apagado).Cuando el motor no está acoplado o la caja de velocidades norepresenta más del 5% de carga y la cabina no está instalada,utilice“Complete rot” (motor en rotación).
La opción “Complete still” también puede causar la rotación limitadadel eje.La opción “Complete rot” hace que la rotación del eje del motor seacerque a la velocidad nominal. Se prefiere una por la elevadaprecisión, pero se requiere la rotación libre sin acoplar del eje delmotor.
4
Regulaciónautomática

78 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤SETUP MODEAutotune⎣ ⎦
Seleccione la opción deseada (desplace hasta o hasta ):
⎡ ⎤Complete stillStart?⎣ ⎦
o⎡ ⎤Complete rot
Start?⎣ ⎦
Como ejemplo estándar con el motor y la máquina instalada en el sistema,se utiliza Complete still. Conecte el terminal 12 (Habilitado) al terminal19 (+24VDC) a través de relés o del conmutador local, active los contactoresde salida y deje el frenado cerrado.
⎡ ⎤Complete stillStart?⎣ ⎦
⎡ ⎤Complete stillPress I Key⎣ ⎦
Pulse para iniciar
¡NOTA! La regulación automática se puede suspender en cualquier momento
pulsando .
El procedimiento de regulación automática empezará a través de lo quevisualice el drive:
desde⎡ ⎤Complete still 1
0 %⎣ ⎦hasta
⎡ ⎤Complete still 1100 %⎣ ⎦entonces
⎡ ⎤Complete still 20 %⎣ ⎦hasta
⎡ ⎤Complete still 2100 %⎣ ⎦después
⎡ ⎤EndAutotune⎣ ⎦
parpadeo

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 79
Pulse 2 veces para salir del procedimiento:
⎡ ⎤SETUP MODEAutotune⎣ ⎦
Desactive los contactores de salida y desconecte el terminal 12 (Habilitado).
¡NOTA! El procedimiento de regulación automática puede tardar algunosminutos a completarse.
Si la operación genera cualquier mensaje de error, por ejemplo cuando eldrive está deshabilitado durante la ejecución del procedimiento:
⎡ ⎤Autotune err#1:Abort⎣ ⎦
y la alarma del LED rojo parpadea
Pulse 2 veces para salir,
pentonces intente repetir el procedimiento de regulación automática. Paramás información acerca de los mensajes de error y las alarmas, consulte lasección 10, Solucionar problemas.
Pulse para salir del menú SETUP MODE.
Espere algunos segundos, aparecerá una secuencia de mensajes:⎡ ⎤Busy
Please wait ...⎣ ⎦entonces
⎡ ⎤RestartPlease wait ...⎣ ⎦
entonces⎡ ⎤R: S:
MONITOR⎣ ⎦entonces
⎡ ⎤Load setup?Yes->Ent No->Esc⎣ ⎦
Pulse para cargar la información de la regulación automática.
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤Load setup?
Yes->Ent No->Esc⎣ ⎦
Pulse para salir del menú:
⎡ ⎤Startup configLoad setup⎣ ⎦

80 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Desplace hasta:
⎡ ⎤Startup configMechanical data⎣ ⎦
Pulse para configurar “Gearbox ratio”, “Pulley diameter” y “Full scale
speed” del sistema:
⎡ ⎤Travel unit selRevolution⎣ ⎦
El parámetro “Travel unit sel” determina todas las unidades de losparámetros del perfil de velocidad y rampa:• Revolución = rpm, rpm/s and rpm/s2
• Milímetros = mm/s, mm/s2 and mm/s3.
⎡ ⎤Gearbox ratio35.00⎣ ⎦
Pulse y ajuste el radio de la caja de velocidades del sistema, pulse
para confirmar.
⎡ ⎤Pulley diameter500 mm⎣ ⎦
Pulse y ajuste el diámetro de polea del sistema, pulse para
confirmar.
⎡ ⎤Full scale speed1460 rpm⎣ ⎦
Pulse para editar la velocidad máxima (velocidad nominal del motor),
pulse para confirmar.
¡NOTA! Define el 100% de la velocidad de aplicación mencionada. La gamade gestión de la velocidad absoluta es ± 200% de Full scale speed..
Pulse para salir del menú de información mecánica:
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤Startup config
Mechanical data⎣ ⎦
5
Informaciónmecánica

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 81
Para la configuración del tipo del encoder diríjase al paso:
- 6.1 6.1 6.1 6.1 6.1 Realimentación desde el encoder conectado al conector XE de latarjeta de regulación
o
- 6.2 6.2 6.2 6.2 6.2 Realimentación desde el encoder conectado al conector XFI de latarjeta opcional EXP-...
Desplace hasta el menú Encoders config:
⎡ ⎤Startup configEncoders config⎣ ⎦
⎡ ⎤Speed fbk selStd encoder⎣ ⎦
⎡ ⎤Std enc typeDigital⎣ ⎦
Pulse para ajustar de digital a sinusoidal, pulse para confirmar:
⎡ ⎤Std enc typeSinusoidal⎣ ⎦
Desplace para ajustar los impulsos por revolución del encoder (ajustede fábrica = 1024ppr):
⎡ ⎤Std enc pulses1024 ppr⎣ ⎦
Pulse y ajuste los nuevos impulsos del encoder, pulse paraconfirmar.
Pulse para salir del menú Encoders config.
6.1
Configuración deltipo del encoder
(Encoder config)
Realimentación desdeel encoder conectadoal conector XE de latarjeta de regulación
Ahora diríjase alos pasos del 66666
al 99999 del capítulo7.1.3.

82 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Desplace hasta el menú Encoders config:
⎡ ⎤Startup configEncoders config⎣ ⎦
⎡ ⎤Speed fbk selStd encoder⎣ ⎦
⎡ ⎤Speed fbk selStd encoder⎣ ⎦
⎡ ⎤Speed fbk selExp encoder⎣ ⎦
⎡ ⎤Speed fbk selExp encoder⎣ ⎦
Pulse siete veces.
⎡ ⎤Exp enc pulses1024 ppr⎣ ⎦
Pulse y ajuste los nuevos impulsos del encoder, pulse paraconfirmar.
Pulse para salir del menú Encoders config.
6.2
Configuración deltipo del encoder
(Encoder config)
Realimentación desdeel encoder conectadoal conector XFI de la
tarjeta opcionalEXP - ...
Ahora diríjase alos pasos del 66666
al 99999 del capítulo7.1.3.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 83
7.1.2 Modo del vector SensorlessPuesta en marcha del drive. Esta operación durará unos 10 segundos y eldrive visualizará (los LEDs parpadean como test):
⎡ ⎤AC Drive LiftStartup...⎣ ⎦
después de 10 segundos⎡ ⎤R: 0 S: 0
MONITOR⎣ ⎦
⎡ ⎤R: 0 S: 0STARTUP⎣ ⎦
¡NOTA! Con respeto a la apertura del menú STARTUP, el drive aparece en elmodo de parametrización.
⎡ ⎤STARTUPStartup config⎣ ⎦
⎡ ⎤STARTUPRegulation mode⎣ ⎦
⎡ ⎤Regulation modeV/f control⎣ ⎦
⎡ ⎤Select new modeV/f control⎣ ⎦
Pulse dos veces:
⎡ ⎤Select new modeSensorless vect⎣ ⎦
Pulse para confirmar la base de datos del modo de regulación seleccionada.
⎡ ⎤Transfer param ?Yes->Ent No->Esc⎣ ⎦
Pulse para transferir los parámetros desde el anterior modo deregulación al nuevo modo de regulación seleccionado. Esta operaciónresulta adecuada sólo si algunos parámetros han sido ajustados en elanterior modo de regulación. En caso contrario, pulse Esc para no transferirparámetros. El drive reiniciará en el nuevo modo de regulación, esteproceso durará unos 5 segundos:
⎡ ⎤RestartPlease wait⎣ ⎦
1
Configuración delmodo del vector
Sensorless

84 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
entonces⎡ ⎤STARTUP
Regulation mode⎣ ⎦
Pulse para salir del menú STARTUP
7.1.3 Modo de control V/f
Puesta en marcha del drive. Esta operación durará unos 10 segundos y eldrive visualizará (los LEDs parpadean como test):
⎡ ⎤AC Drive LiftStartup...⎣ ⎦
después de 10 segundos⎡ ⎤R: 0 S: 0
MONITOR⎣ ⎦
⎡ ⎤R: 0 S: 0STARTUP⎣ ⎦
¡NOTA! Con respeto a la apertura del menú STARTUP, el drive aparece en elmodo de parametrización.
⎡ ⎤STARTUPStartup config⎣ ⎦
⎡ ⎤STARTUP CONFIGEnter setup mode⎣ ⎦
, espere unos segundos:
⎡ ⎤SETUP MODEDrive data⎣ ⎦
⎡ ⎤Mains voltage400 V⎣ ⎦
Pulse o para seleccionar la tensión de entrada de la CA de lasiguiente lista: 460 - 440 - 415 - 400 - 380 - 230V, pulse paraconfirmar.Si es necesario, también es posible cambiar: Temperatura ambiente yfrecuencia de conmutación.
1
Activación delcontrol V/f
2
Configuración delmodo de
Control V/f
Ahora diríjase alos pasos del 22222
al 99999 del capítulo7.1.3.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 85
⎡ ⎤Ambient temp40° C⎣ ⎦
⎡ ⎤Switching freq8 Khz⎣ ⎦
Pulse , el drive mostrará:
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤SETUP MODE
Drive data⎣ ⎦
Configure los parámetros de la placa del motor en el menú de informacióndel motor (los valores aceptados dependen del tamaño del drive):
⎡ ⎤SETUP MODEMotor data⎣ ⎦
⎡ ⎤Rated voltage380.00 V⎣ ⎦
para editar el voltaje del motor. Para confirmar el nuevo valor pulse
, para cancelar la edición pulse + Escape
o desplace hasta:
⎡ ⎤Rated frequency50.00 Hz⎣ ⎦
para editar la frecuencia del motor, para confirmar el nuevo valor pulse
⎡ ⎤Rated current43 A⎣ ⎦
para editar la corriente del motor, para confirmar el nuevo valor pulse .
¡NOTA! El valor no debería ser inferior a aproximadamente 0,3 veces lacorriente nominal del drive, la corriente de salida de la clase 1 @400Vde la placa del drive.
⎡ ⎤Rated speed1460.00 rpm⎣ ⎦
3
Configure lainformación del
motor

86 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
para editar la velocidad del motor, para confirmar el nuevo valor pulse .
¡NOTA! El valor es la velocidad de carga completa del motor a la frecuencia nominal.Si el valor del desplazamiento está disponible en la información de la placadel motor, ajuste el parámetro “Rated speed” de la siguiente manera:Ratedspeed = Velocidad síncrona – Desplazamiento
⎡ ⎤Rated power22 kW⎣ ⎦
para editar la potencia del motor, para confirmar el nuevo valor pulse .
¡NOTA! Para una placa de motor medida en HP, configure la potencia nominalkW = 0,736 x velocidad Hp del motor.
⎡ ⎤Cosfi0.85⎣ ⎦
para editar la j del cos del motor (factor de potencia), para confirmar
el nuevo valor pulse .
¡NOTA! Deje el valor por defecto para la phi del Cos ϕ en el caso que lainformación no esté disponible en la placa.
⎡ ⎤Efficiency91.20 %⎣ ⎦
para editar la eficiencia del motor, para confirmar el nuevo valor pulse .
¡NOTA! Deje el valor por defecto para la eficiencia en el caso que lainformación no esté disponible en la placa.
Pulse para salir de la información del motor; durante algunos segundos
el drive mostrará:⎡ ⎤Busy
Please wait ...⎣ ⎦entonces
⎡ ⎤SETUP MODEMotor data⎣ ⎦
¡NOTA! Si se han realizado cambios en los parámetros del menú de lainformación del motor, con esta operación, los valores internos deldrive se calcularán y aparecerán los resultados de la regulaciónautomática.Si la operación genera cualquier mensaje de error o aparece algún
4
Regulaciónautomática

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 87
led de alarma, compruebe la consistencia de los parámetros del motore inténtelo de nuevo o consulte la sección 10, Solucionar problemas.
Desplace para ejecutar el procedimiento de regulación automática;para este procedimiento se pueden utilizar dos opciones: “Complete still”o “Complete rot”.
¡NOTA! Cuando el motor está acoplado a la caja de velocidades y el ascensorestá instalado, utilice“Complete still” (motor apagado).Cuando el motor no está acoplado o la caja de velocidades norepresenta más del 5% de carga y la cabina no está instalada, utilice“Complete rot” (motor en rotación).
La opción “Complete still” también puede causar la rotación limitadadel eje.La opción “Complete rot” hace que la rotación del eje del motor seacerque a la velocidad nominal. Se prefiere una por la elevada precisión,pero se requiere la rotación libre sin acoplar del eje del motor.
⎡ ⎤SETUP MODEAutotune⎣ ⎦
Seleccione la opción deseada (desplace hasta o hasta ):
⎡ ⎤Complete stillStart?⎣ ⎦
o⎡ ⎤Complete rot
Start?⎣ ⎦
Como ejemplo estándar con el motor y la máquina instalada en el sistema,se utiliza Complete still. Conecte el terminal 12 (Habilitado) al terminal19 (+24VDC) a través de relés o del conmutador local, active los contactoresde salida y deje el frenado cerrado.
⎡ ⎤Complete stillStart?⎣ ⎦
⎡ ⎤Complete stillPremere I Key⎣ ⎦
Pulse para iniciar
¡NOTA! La regulación automática se puede suspender en cualquier momento
pulsando .

88 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
El procedimiento de regulación automática empezará a través de lo quevisualice el drive:
desde⎡ ⎤Complete still 1
0 %⎣ ⎦hasta
⎡ ⎤Complete still 1100 %⎣ ⎦entonces
⎡ ⎤Complete still 20 %⎣ ⎦hasta
⎡ ⎤Complete still 2100 %⎣ ⎦después
⎡ ⎤EndAutotune⎣ ⎦
parpadeo
Pulse 2 veces para salir del procedimiento:
⎡ ⎤SETUP MODEAutotune⎣ ⎦
Desactive los contactores de salida y desconecte el terminal 12 (Habilitado).¡NOTA! El procedimiento de regulación automática puede tardar algunos
minutos a completarse.
Si la operación genera cualquier mensaje de error, por ejemplo cuando eldrive está deshabilitado durante la ejecución del procedimiento:
⎡ ⎤Autotune err#1:Abort⎣ ⎦
y la alarma del LED rojo parpadea
Pulse 2 veces para salir,
entonces intente repetir el procedimiento de regulación automática. Paramás información acerca de los mensajes de error y las alarmas, consulte lasección 10, Solucionar problemas.
Pulse para salir del menú SETUP MODE.
Espere algunos segundos, aparecerá una secuencia de mensajes:⎡ ⎤Busy
Please wait ...⎣ ⎦entonces
⎡ ⎤RestartPlease wait ...⎣ ⎦
entonces

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 89
⎡ ⎤R: S:MONITOR⎣ ⎦
entonces⎡ ⎤Load setup?
Yes->Ent No->Esc⎣ ⎦
Pulse para cargar la información de la regulación automática.
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤Load setup?
Yes->Ent No->Esc⎣ ⎦
Pulse para salir del menú:
⎡ ⎤Startup configLoad setup⎣ ⎦
Desplace hasta:
⎡ ⎤Startup configMechanical data⎣ ⎦
Pulse para configurar “Gearbox ratio”, “Pulley diameter” y “Full scale
speed” del sistema:
⎡ ⎤Travel unit selRevolution⎣ ⎦
El parámetro “Travel unit sel”determina todas las unidades de los parámetrosdel perfil de velocidad y rampa:• Revolución = rpm, rpm/s and rpm/s2
• Milímetros = mm/s, mm/s2 and mm/s3.
⎡ ⎤Gearbox ratio35.00⎣ ⎦
Pulse y ajuste el radio de la caja de velocidades del sistema, pulse
para confirmar.
⎡ ⎤Pulley diameter500 mm⎣ ⎦
Pulse y ajuste el diámetro de polea del sistema, pulse para
confirmar.
⎡ ⎤Full scale speed1460 rpm⎣ ⎦
5
Mechanical data(informaciónmecánica)

90 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Pulse para editar la velocidad máxima (velocidad nominal del motor),
pulse para confirmar.
¡NOTA! Define el 100% de la velocidad de aplicación mencionada. La gamade gestión de la velocidad absoluta es ± 200% de la velocidad a granescala.
Pulse para salir del menú Mechanical data:
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤Startup config
Mechanical data⎣ ⎦
PulleyMotor Gearbox
Pulley diameter
Rope weight
Car weight
Load weight
Counter weight
Gearbox ratio
Desplace hasta el menú Weights:
⎡ ⎤Startup configWeights⎣ ⎦
Pulse para configurar el peso de la cabina (Car weight), el peso delcontador, el peso de la carga, el peso de la cuerda, el parámetro de inerciadel motor y de la caja de velocidades:
⎡ ⎤Car weight0 Kg⎣ ⎦
Pulse y edite el valor peso de la cabina (Car weight), pulse para confirmar.
⎡ ⎤Counter weight0 Kg⎣ ⎦
6
Pesos

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 91
Pulse y el valor del parámetro Counter weight (peso del contador) (el
peso de la cabina para alcanzar el sistema de balance), pulse paraconfirmar.
⎡ ⎤Load weight0 Kg⎣ ⎦
Pulse y edite el valor del parámetro Load weight (peso de la carga)(peso máximo de carga del ascensor), pulse para confirmar.
⎡ ⎤Rope weight0 Kg⎣ ⎦
Pulse y edite el valor del parámetro Rope weight (peso de la cuerda)(inercia total de la cuerda de la cabina), pulse para confirmar.
⎡ ⎤Motor inertia0.00 Kg*m2⎣ ⎦
Pulse y edite el valor Motor inertia (inercia del motor) (si no estádisponible, deje el valor por defecto), pulse para confirmar.
⎡ ⎤Gearbox inertia0.00 Kg*m2⎣ ⎦
Pulse y edite el valor Gearbox inertia (inercia de la caja de velocidades)(si no está disponible, deje el valor por defecto), pulse para confirmar.
¡NOTA! “Gearbox inertia” se considera la inercia de todas las masas rotativasde la parte lenta de la caja de velocidades, por ejemplo, la inercia depolea, etc...
Pulse para salir del menú Weight menu.
Pulse 2 veces.Siga los siguientes pasos para configurar los parámetros de resistencia del BU:
⎡ ⎤Startup configBU protection⎣ ⎦
⎡ ⎤BU controlInternal⎣ ⎦
7
Ajuste de la unidadde frenado
[BU protection]

92 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤BU resistance15.40 ohm⎣ ⎦
Pulse y edite el valor de resistencia, pulse para confirmar.
¡NOTA! Consulte la sección 4.9.2 para el valor mínimo permisible de laresistencia.
Para la protección térmica de la resistencia de frenado, se define unacaracterística inversa del tiempo. Esto requiere la definición de la potenciade la resistencia en servicio continuado, BU res cont pwr.
¡NOTA! Consulte el capítulo 9.2 para más información acerca de la proteccióndel BU
⎡ ⎤BU res cont pwr4.00 kW⎣ ⎦
Pulse y edite el valor de la potencia, pulse para confirmar.
Pulse para salir del menú Encoder Config.
⎡ ⎤Startup configBU protection⎣ ⎦
⎡ ⎤BusyPlease wait ...⎣ ⎦
hasta⎡ ⎤STARTUP
Save config?⎣ ⎦
El mensaje visualiza “Save config ?” (Recomendado).Para esta operación el drive tardará unos 5 segundos.
Pulse para ejecutar el procedimiento.
⎡ ⎤STARTUPSave config?⎣ ⎦
⎡ ⎤R: S:STARTUP⎣ ⎦
¡NOTA! Con respecto al cierre del menú STARTUP, el drive sale del modo deparametrización y se convierte en operativo.
¡NOTA! El drive no se puede habilitar cuando el menú STARTUP está abierto.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 93
El drive AVyL permite ajustar un perfil de velocidad a elegir entre 8 puntosde velocidad diferentes: “Multi speed 0” ... “Multi speed 7”
⎡ ⎤R: S:STARTUP⎣ ⎦
⎡ ⎤R: S:TRAVEL⎣ ⎦
⎡ ⎤TRAVELSpeed profile⎣ ⎦
⎡ ⎤Smooth start spd0 rpm⎣ ⎦
⎡ ⎤Multi speed 00 rpm⎣ ⎦
Pulse para ajustar el punto de ajuste “Multi speed 0”:
⎡ ⎤Multi speed 0+00000000 rpm⎣ ⎦
Edite el valor solicitado por el sistema y pulse para confirmar.
Desplace para ajustar el punto de ajuste “Multi speed 1”:
⎡ ⎤Multi speed 10 rpm⎣ ⎦
Pulse y repita el procedimiento igual que para “Multi speed 0”.
Desplace para ajustar todos los otros Multi speed requeridos por el sistema.
A través de la combinación de “Mlt spd s0 src” (igual que la entradadigital 4), “Mlt spd s1 src” (igual que la entrada digital 5) y “Mltspd s2 src” (igual que la entrada digital 6), es posible seleccionar elMulti speed deseado, de acuerdo con la siguiente tabla:
Mtl spd sel
2 src
Mtl spd sel
1 src
Mtl spd sel
0 srcACTIVE SPEED
0 0 0 Multi speed 0
0 0 1 Multi speed 1
0 1 0 Multi speed 2
0 1 1 Multi speed 3
1 0 0 Multi speed 4
1 0 1 Multi speed 5
1 1 0 Multi speed 6
1 1 1 Multi speed 7TAV3i011
8
Ajuste de velocidad[Speed profile]

94 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Pulse para salir del menú Speed profile.
El drive AVyL permite ajustar un perfil de rampa igual que las imágenesque se muestran a continuación:
Speed ref
Multispeed
MR0 acc ini jerk
MR0 acceleration
MR0 acc end jerk
Speed refMultispeed
Multispeed
MR0 dec ini jerk MR0 deceleration
MR0 dec end jerkAcceleration
MR0 end decel
Acceleration
⎡ ⎤TRAVELSpeed profile⎣ ⎦
⎡ ⎤TRAVELRamp profile⎣ ⎦
⎡ ⎤MR0 acc ini jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 acc ini jerk”, pulse para confirmar.
⎡ ⎤MR0 acceleration500 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 acceleration”, pulse paraconfirmar.
9
Impostazionerampa
[Ramp profile]

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado• 95
⎡ ⎤MR0 acc end jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 acc end jerk”, pulse paraconfirmar.
⎡ ⎤MR0 dec ini jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 dec ini jerk”, pulse paraconfirmar.
⎡ ⎤MR0 deceleration500 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 deceleration”, pulse paraconfirmar.
⎡ ⎤MR0 dec end jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 dec end jerk”, pulse paraconfirmar.
⎡ ⎤MR0 end decel1000 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 end decel”, pulse paraconfirmar.
⎡ ⎤TRAVELRamp profile⎣ ⎦
Pulse 9 veces para iniciar el procedimiento de guardado
⎡ ⎤TRAVELSAVE PARAMETERS⎣ ⎦
Pulse para ejecutar el procedimiento:

96 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤BusyPlease wait ...⎣ ⎦
hasta⎡ ⎤TRAVEL
SAVE PARAMETERS⎣ ⎦
Pulse + .
⎡ ⎤R: 0 S: 0MONITOR⎣ ⎦
Ahora el drive seajusta con los
comandos para lasecuenciaestándar.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 97
7.2 finales para AVy...BR / BR4 (Motores sin escobillas)
Procedimiento de configuración de pruebas finales
Función
Configure lainformación del drive
Configure lainformación del motor
Ponga en marcha laregulación automáticadel regulador decorriente
Modo de configuraciónEscape
Configure toda lainformación mecánicadel sistema
Configure toda lainformación del peso delsistema
Configuración delencoder
Configure losparámetros de la unidadde frenadoGuarde la configuraciónrealizada en el menú deinicioConfigure el perfil de lavelocidad
Configure el perfil de larampa
Enfase del encoder
Guarde todos losparámetros
Descripción
Parámetros de información del drive: Voltaje de la red,temperatura del ambiente, frecuencia de conmutación,resolución de referencia de velocidadParámetros de información del motor: Voltaje nominal,corriente nominal, velocidad nominal, pares de polos,constante del par, constante de la EMF, resistencia estatore inductancia LsS.
El procedimiento de regulación automática mide losparámetros de un motor real: "Curr Reg autotune" puedeutilizarse cuando el motor está acoplado a la caja develocidades y la cabina está instalada. Podría provocaruna rotación limitada del eje.
Durante esta operación se requiere un «Load setup» paracargar todos cambios de informaciones en el SETUPMODE.
Información mecánica del sistema:Radio de la caja develocidades, diámetro de polea, velocidad a gran escala.
Información de los pesos del sistema:Peso de la cabina,peso del contador, peso de la carga, peso de la cuerda,inercia del motor, inercia de la caja de velocidades.
Selección del tipo de fuente de realimentación: SinusoidalHall, Sinusoidal SinCos, Sinusoidal Extern, Digital Hall,DigitalExtern, SinCos, Resolver y Hyperface.
Parámetros de la unidad de frenado: Tipo de unidad defrenado (interna / externa), resistencia de la unidad defrenado, potencia de la unidad de frenado.
Utilice "Save Config ?" para guardar todos los cambiosrealizados en el menú de Inicio.
Una combinación binaria de tres entradas digitales permiteseleccionar hasta 8 puntos de ajuste de la velocidad diferentes.La sacudida de las aceleraciones y deceleraciones puedenajustarse en el perfil de la rampa
Hay dos opciones disponibles:- motor en marcha o parado.
Paso
1
2
3
4
5
6
7
9
10
11
12
13
8

98 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
¡NOTA! El siguiente procedimiento de inicio del drive toma como ejemplo undrive AVyL 4220 BR4 (revision de software 3.300).
Ponga en marcha el drive, al cabo de unos segundos el drive visualizará elmenú principal:
⎡ ⎤R: S:MONITOR⎣ ⎦
⎡ ⎤R: 0 S: 0STARTUP⎣ ⎦
¡NOTA! Con respeto a la apertura del menú STARTUP, el drive aparece en elmodo de parametrización.
⎡ ⎤STARTUPStartup config⎣ ⎦
⎡ ⎤Startup configEnter setup mode⎣ ⎦
, espere unos segundos:
⎡ ⎤SETUP MODEDrive data⎣ ⎦
⎡ ⎤SETUP MODEDrive data⎣ ⎦
⎡ ⎤Mains voltage400 V⎣ ⎦
Pulse o para seleccionar la tensión de entrada de la CA de la
siguiente lista: 460 - 440 - 415 - 400 - 380 - 230V, pulse paraconfirmar. Si es necesario, también es posible cambiar: Temperaturaambiente, frecuencia de conmutación y resolución de velocidad.
⎡ ⎤Ambient temp40° C⎣ ⎦
⎡ ⎤Switching freq8 Khz⎣ ⎦
1
Configure losparámetros del
drive(Drive data)

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 99
⎡ ⎤Spd ref/fbk res0.250 rpm⎣ ⎦
Pulse o para seleccionar un valor de resolución de velocidadbasado en la velocidad máxima del motor.Por ejemplo: si la velocidad nominal es de 144 rpm, ajuste 0,03125 rpm(consulte la tabla)
Resolución de velocidad Valor máximo de velocidad(Spd ref/fbk res)
0.125 rpm 2048 rpm 0.25 rpm 4096 rpm0.5 rpm 8192 rpm1 rpm 16384rpm
0.03125 rpm 512 rpm
⎡ ⎤Spd ref/fbk res0.03125 rpm⎣ ⎦
Pulse para confirmar la selección.
Pulse , el drive mostrará:
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤SETUP MODE
Drive data⎣ ⎦
Configure los parámetros de la placa del motor en el menú de informacióndel motor (los valores aceptados dependen del tamaño del drive):
⎡ ⎤Rated voltage330.00 V⎣ ⎦
Pulse para editar el voltaje nominal del motor.
Pulse de nuevo para confirmar el nuevo valor.
⎡ ⎤Rated current35 A⎣ ⎦
Pulse para editar la corriente nominal del motor. Pulse de nuevo para confirmar.
2
Configure losparámetros del
motor(Motor data)

100 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤Rated speed2000.00 rpm⎣ ⎦
Pulse para editar la velocidad síncrona nominal del motor. Pulse de
nuevo para confirmar el valor.
⎡ ⎤Pole pairs4⎣ ⎦
Pulse para editar el par de polos del motor. Pulse de nuevo para
confirmar el valor.
⎡ ⎤Torque Constant2.480 Nm/A⎣ ⎦
Pulse para editar el valor del par del motor. Pulse de nuevo paraconfirmar el valor.
¡NOTA! Si la constante del par no está disponible, se podría calcular con losiguiente:
K =T1
Pn
2 S
60n
In
Donde:P = Potencia nominal [W]
I = Corriente nominal [A]
S = Velocidad nominal [rpm]
n
n
n
K =T1
Tn
In
Donde:T = Par nominal [Nm]
I = Corriente nominal [A]n
n
⎡ ⎤EMF constant1.430 V*s⎣ ⎦
Pulse para editar la constante posterior de la EMF del motor desde la
placa del tipo del motor (*). Pulse para confirmar.
⎡ ⎤Stator resist0.135 ohm⎣ ⎦
Pulse para editar el valor de resistencia estátor del motor (*).
Pulse para confirmar.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 101
⎡ ⎤LsS inductance0.00237 H⎣ ⎦
Pulse para editar el valor estátor del motor (*). Pulse para confirmar.
(*)¡NOTA! Si los valores “EMF Constant”, “Stator resistance” y“LsSinductance” no se conocen, ajústelos a cero antes de hacerfuncionar el procedimiento de auto sintonización de la corriente.
Pulse para salir de la información del motor; durante algunos segundos
el drive mostrará:⎡ ⎤Busy
Please wait ...⎣ ⎦entonces
⎡ ⎤SETUP MODEMotor data⎣ ⎦
¡NOTA! Si se han realizado cambios en los parámetros del menú de lainformación del motor, con esta operación, los valores internos deldrive se calcularán y aparecerán los resultados de la regulaciónautomática. Si la operación genera cualquier mensaje de error oaparece algún led de alarma, compruebe la consistencia de losparámetros del motor e inténtelo de nuevo o consulte las direccionesespecíficas de la sección 10, Solucionar problemas.
Desplace para ejecutar el procedimiento de regulación automáticadel regulador de corriente.
Esta operación puede provocar una rotación limitada del eje.
⎡ ⎤SETUP MODEAutotune⎣ ⎦
⎡ ⎤CurrRegStart?⎣ ⎦
Conecte el terminal 12 (Habilitado) al terminal 19 (+24VDC) a través de relés odel conmutador local, y luego active los contactores de salida. Se sugiere abrir elfrenado (se debería extraer la cuerda), si no es posible deje el frenado cerrado.
⎡ ⎤CurrRegPremere I Key⎣ ⎦
Pulse para iniciar el procedimiento de regulación automática.
¡NOTA! El procedimiento de regulación automática puede tardar algunosminutos a completarse. La regulación automática se puede suspender
en cualquier momento pulsando .
3
Regulaciónautomática(Autotune)

102 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
El drive visualizará desde:⎡ ⎤CurrReg
0 %⎣ ⎦hasta
⎡ ⎤CurrReg100 %⎣ ⎦después
⎡ ⎤EndAutotune⎣ ⎦
parpadea para mostrar que el procedimiento termina.
Pulse 2 veces para salir del procedimiento:
⎡ ⎤SETUP MODEAutotune⎣ ⎦
Desactive los contactores de salida y desconecte el terminal 12(Habilitado).
Pulse y espero unos segundos
⎡ ⎤Load setup?Yes->Ent No->Esc⎣ ⎦
⎡ ⎤BusyPlease wait ...⎣ ⎦
entonces⎡ ⎤Load setup?
Yes->Ent No->Esc⎣ ⎦
Pulse para salir del menú:
⎡ ⎤Startup configLoad setup⎣ ⎦
Desplace hasta:
⎡ ⎤Startup configMechanical data⎣ ⎦
Pulse para configurar “Gearbox ratio”, “Pulley diameter” y “Full scale
speed” del sistema:
⎡ ⎤Travel unit selRevolution⎣ ⎦
El parámetro “Travel unit sel” determina todas las unidades de losparámetros del perfil de velocidad y rampa:• Revolución= rpm, rpm/s and rpm/s2
• Milímetros = mm/s, mm/s2 and mm/s3.
5
Informaciónmecánica
4
Configuración dela carga

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 103
Pulse y o para seleccionar las unidades, pulse para
confirmar.
⎡ ⎤Gearbox ratio35.00⎣ ⎦
Pulse para ajustar el radio de la caja de velocidades del sistema,
pulse para confirmar.
⎡ ⎤Pulley diameter500 mm⎣ ⎦
Pulse y edite el diámetro de polea del sistema, pulse paraconfirmar.
⎡ ⎤Pulley diameter+0000500 mm⎣ ⎦
para el parámetro Full scale speed.
⎡ ⎤Full scale speed2000 rpm⎣ ⎦
Pulse dite el valor de la velocidad máxima (velocidad nominal del
motor), pulse para confirmar. Pulse para salir del menú deinformación mecánica.
Desplace hasta el menú de los pesos:
⎡ ⎤Startup configWeights⎣ ⎦
PulleyMotor Gearbox
Pulley diameter
Rope weight
Car weight
Load weight
Counter weight
Gearbox ratio
Pulse para configurar el peso de la cabina (Car weight), el peso delcontador, el peso de la carga, el peso de la cuerda, el parámetro de inercia
6
Pesos

104 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
del motor y de la caja de velocidades:
⎡ ⎤Car weight0 Kg⎣ ⎦
Pulse y edite el valor del peso de la cabina, pulse para confirmar.
⎡ ⎤Counter weight0 Kg⎣ ⎦
Pulse y el valor del parámetro del peso del contador (el peso de la
cabina para alcanzar el sistema de balance), pulse para confirmar.
⎡ ⎤Load weight0 Kg⎣ ⎦
Pulse y edite el valor del parámetro del peso de la carga (peso máximo
de carga del ascensor), pulse para confirmar.
⎡ ⎤Rope weight0 Kg⎣ ⎦
Pulse y edite el valor del parámetro del peso de la cuerda (inercia
total de la cuerda de la cabina), pulse para confirmar.
⎡ ⎤Motor inertia0.00 Kg*m2⎣ ⎦
Pulse y edite el valor de la inercia del motor (si no está disponible,
deje el valor por defecto), pulse para confirmar.
⎡ ⎤Gearbox inertia0.00 Kg*m2⎣ ⎦
Pulse y edite el valor de la inercia de la caja de velocidades (si no está
disponible, deje el valor por defecto), pulse para confirmar.
¡NOTAS! “Gearbox inertia” se considera la inercia de todas las masasrotativas de la parte rotativa lenta de la caja de velocidades,por ejemplo, la inercia de polea, etc...
Pulse para salir del menú de pesos.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 105
Pulse 2 veces.
⎡ ⎤Startup configEncoders config⎣ ⎦
⎡ ⎤Speed fbk selStd encoder⎣ ⎦
⎡ ⎤Std enc typeSinusoidal Hall⎣ ⎦
Pulse para seleccionar el parámetro (consulte la siguiente lista) según
el tipo de encoder, pulse para confirmar.
Parámetro DescripciónSinusoidalHall es un encoder incremental sinusoidal con trazos
A+ / A-, B+ /B-, C+ / C- y tres trazos de posiciónabsoluta del «Hall sensor» digital para lasincronización inicial (Conector XE)
SinusoidalSinCos es un encoder incremental sinusoidal con trazosA+ / A-, B+ /B-, C+ / C- y dos trazos de posiciónabsoluta de Sin Cos analógicos para lasincronización inicial (Conector XE)
SinusoidalExtern es un encoder incremental sinusoidal con trazosA+ / A-, B+ / B- e información de posición absolutaa través del interface de la serie SSI para lasincronización inicial (conector XE, requiere tarjetaAPC100y).
DigitalHall es un encoder incremental digital con trazos A+ /A-, B+ /B, C+ / C- y tres trazos de posición absolutadel «Hall sensor» digital para la sincronizacióninicial (Conector XE).
DigitalExtern es un encoder incremental digital con trazos A+ /A-, B+ / B- e información de posición absoluta através del interface de la serie SSI para lasincronización inicial (conector XE, requiere tarjetaAPC100y).
SinCos es un encoder absoluto sinusoidal con trazos SinCos.Resolver es la realimentación de la resolución, utilizando las tarjetas
de opciones: EXP-RES, consulte el manual para másinformación (conector XFR en la tarjeta EXP-RES).
SinusoidalHiperface Encoder absoluto con protocolo de Hiperface(Conector XE).
Sinusoidal Intern encoder incremental sinusoidal con trazos A+ / A-, B+ /B-, C+ / C-, los trazos de posición absoluta no sonnecesarios ya que la sincronización de fase se realiza deforma automática en cada puesta en marcha
7
Configuración deltipo del encoder(Encoder config)

106 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
Digital Intern encoder incremental digital con trazos A+ / A-, B+ / B-,C+ / C-, los trazos de posición absoluta no son necesariosya que la sincronización de fase se realiza de formaautomática en cada puesta en marcha.
Para cada realimentación del encoder, ajuste la configuracióncorrecta de los puentes en la tarjeta de regulación RV33.
⎡ ⎤Std enc typeSinusoidalSinCos⎣ ⎦
⎡ ⎤Std enc pulses1024 ppr⎣ ⎦
Pulse para editar el número según la información del encoder, pulse
para confirmar.
¡NOTA! Es posible utilizar sólo el encoder con impulsos por revolución iguala un múltiple de 2.Ejemplo: 512 ppr, 1024 ppr, 2048 ppr, etc.
Pulse para salir del menú Encoder Config..
Pulse 2 veces.
Siga los siguientes pasos para configurar los parámetros de resistencia del BU:⎡ ⎤Startup config
BU protection⎣ ⎦
⎡ ⎤BU controlInternal⎣ ⎦
⎡ ⎤BU resistance15.40 ohm⎣ ⎦
Pulse y edite el valor de resistencia, pulse per confermare.
¡NOTA! Consulte la sección 4.9.2 para el valor mínimo permisible de laresistencia.
Para la protección térmica de la resistencia de frenado, se define unacaracterística inversa del tiempo. Esto requiere la definición de la potenciade la resistencia en servicio continuado, BU res cont pwr.
¡NOTA! Consulte el capítulo 9.2 para más información acerca de la proteccióndel BU
8
Ajuste de la unidadde frenado
[BU protection]

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 107
⎡ ⎤BU res cont pwr4.00 kW⎣ ⎦
Pulse y edite el valor de la potencia, pulse para confirmar.
Pulse para salir del menú Encoder Config..
Pulse para salir del menú Startup Config.
⎡ ⎤STARTUPSave config?⎣ ⎦
El mensaje visualiza “Save config ?” (Recomendado).Para esta operación el drive tardará unos 5 segundos.
Pulse per eseguire la procedura:
⎡ ⎤BusyPlease wait ...⎣ ⎦
hasta⎡ ⎤STARTUP
Save config?⎣ ⎦
Pulse para salir del menú STARTUP:
⎡ ⎤R: 0 S: 0STARTUP⎣ ⎦
El drive AVyL permite ajustar un perfil de velocidad a elegir entre 8 puntosde velocidad diferentes: “Multi speed 0” ... “Multi speed 7”
⎡ ⎤R: S:STARTUP⎣ ⎦
⎡ ⎤R: S:TRAVEL⎣ ⎦
⎡ ⎤TRAVELSpeed profile⎣ ⎦
⎡ ⎤Smooth start spd0 rpm⎣ ⎦
⎡ ⎤Multi speed 00 rpm⎣ ⎦
Pulse para ajustar el punto de ajuste “Multi speed 0”:
9
Guardar laconfiguración
10
Ajuste develocidad
[Speed profile]

108 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤Multi speed 0+00000000 rpm⎣ ⎦
Edite el valor solicitado por el sistema y pulse para confirmar.
Desplace para ajustar el punto de ajuste “Multi speed 1”:
⎡ ⎤Multi speed 10 rpm⎣ ⎦
Pulse y repita el procedimiento igual que para “Multi speed 0”.
Desplace para ajustar todos los otros Multi speed requeridos por el sistema.
A través de la combinación de “Mlt spd s0 src” (igual que la entradadigital 4), “Mlt spd s1 src” (igual que la entrada digital 5) y “Mlt spd s2src” (igual que la entrada digital 6), es posible seleccionar el Multi speeddeseado, de acuerdo con la siguiente tabla:
Mtl spd sel
2 src
Mtl spd sel
1 src
Mtl spd sel
0 srcACTIVE SPEED
0 0 0 Multi speed 0
0 0 1 Multi speed 1
0 1 0 Multi speed 2
0 1 1 Multi speed 3
1 0 0 Multi speed 4
1 0 1 Multi speed 5
1 1 0 Multi speed 6
1 1 1 Multi speed 7TAV3i011
Pulse para salir del menú Speed profile.
El drive AVyL permite ajustar un perfil de rampa igual que las imágenesque se muestran a continuación:
11
Ajuste de la rampa[Ramp profile]

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 109
Speed ref
Multispeed
MR0 acc ini jerk
MR0 acceleration
MR0 acc end jerk
Speed refMultispeed
Multispeed
MR0 dec ini jerk MR0 deceleration
MR0 dec end jerkAcceleration
MR0 end decel
Acceleration
⎡ ⎤TRAVELSpeed profile⎣ ⎦
⎡ ⎤TRAVELRamp profile⎣ ⎦
⎡ ⎤MR0 acc ini jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 acc ini jerk”, pulse para
confirmar.
⎡ ⎤MR0 acceleration500 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 acceleration”, pulse para
confirmar.
⎡ ⎤MR0 acc end jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 acc end jerk”, pulse para
confirmar.

110 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
⎡ ⎤MR0 dec ini jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 dec ini jerk”, pulse para
confirmar.
⎡ ⎤MR0 deceleration500 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 deceleration”, pulse para
confirmar.
⎡ ⎤MR0 dec end jerk1000 rpm/s2⎣ ⎦
Pulse para ajustar el parámetro “MR0 dec end jerk”, pulse para
confirmar.
⎡ ⎤MR0 end decel1000 rpm/s⎣ ⎦
Pulse para ajustar el parámetro “MR0 end decel”, pulse per paraconfirmar.
⎡ ⎤TRAVELRamp profile⎣ ⎦
Pulse 9 veces para iniciar el procedimiento de guardado
⎡ ⎤TRAVELSAVE PARAMETERS⎣ ⎦
Pulse para ejecutar el procedimiento:
⎡ ⎤BusyPlease wait ...⎣ ⎦
hasta⎡ ⎤TRAVEL
SAVE PARAMETERS⎣ ⎦
Pulse + .
⎡ ⎤R: 0 S: 0MONITOR⎣ ⎦
Ahora el drive se ajusta con los comandos para la secuencia estándar.

ARTDriveL Manual de instrucciones Capítulo 7 – Pruebas finales mediante el teclado • 111
⎡ ⎤R: 0 S: 0SERVICE⎣ ⎦
.
⎡ ⎤SERVICEInsert password⎣ ⎦
Pulse dos veces.
⎡ ⎤Insert password+00000⎣ ⎦
el último dígito parpadeará
⎡ ⎤Insert password+12345⎣ ⎦
Introduzca la contraseña “12345” y pulse
⎡ ⎤Insert password+00000⎣ ⎦
Pulse dos veces
⎡ ⎤R: 0 S: 0SERVICE⎣ ⎦
Pulse cuatro veces.
⎡ ⎤R: 0 S: 0REGULATION PARAM⎣ ⎦
Pulse cuatro veces.
⎡ ⎤REGULATION PARAMFlux config⎣ ⎦
.
⎡ ⎤Flux configMagnetiz config⎣ ⎦
Ahora es posible seleccionar dos modos distintos para el procedimientodesincronización de fase: rotación (freno abierto) o parado (freno cerrado)
⎡ ⎤Autophase rotStart ?⎣ ⎦
o
⎡ ⎤Autophase stillStart ?⎣ ⎦
Active los contactores de salida y pulse .
12
Enfase del encoder[Autophase]
¡Sólo se requierecuando el
encoder/motorno están alineados
en la fábrica!

112 • Capítulo 7 – Pruebas finales mediante el teclado ARTDriveL Manual de instrucciones
13
Guardar todos loscambios
⎡ ⎤AutophaseWaiting start ...⎣ ⎦
Cuando el drive visualice “Waiting start ...”, active los comandos Habilitare Inicio, y luego espere hasta que el procedimiento de enfase termine.
⎡ ⎤AutotuneEnd⎣ ⎦
Cuando el drive visualice “Autotune End”, cierre el frenado, elimine loscomandos Habilitar e Iniciar, desactive los contactores de salida.
Pulse tres veces.
⎡ ⎤REGULATION PARAMFlux config⎣ ⎦
Pulse dos veces.
⎡ ⎤REGULATION PARAMSAVE PARAMETERS⎣ ⎦
Pulse para guardar los cambios.

ARTDriveL Manual de instrucciones Capítulo 8 – Secuencias del ascensor • 113
Capítulo 8 – Secuencias del ascensor
Control del contactor externoEs posible delegar el control del contactor de salida a dispositivos externoscomo los PLC, etc. En este caso se debe asegurar que el contactor estácerrado antes de la habilitación del drive y abierto sólo después de haberemitido la señal de inhabilitación del drive. Se deben tener en cuenta lostiempos de apertura y cierre mecánicos del contactor.
Control del freno externoEl control del frenado también se puede llevar a cabo a través de mediosexternos. En este caso, el frenado se puede abrir sólo cuando se haconfirmado la señal de que el drive está preparado. El frenado se debecerrar después de eliminar el comando Start fwd/rev y de que la señalprogramada Ref is zero o Ref is zero dly se active en la salida digital. Enlos modos FOC y BRS es posible consultar la señal Ref is zero dly y ajustarcon el parámetro Spd 0 ref delay el tiempo de retardo para la activación dela señal cuando el motor se haya detenido completamente, de modo que seevite un impacto debido a la detención. En el caso del control del SLS yVF aunque no sea posible garantizar el par requerido a bajas frecuenciases mejor consultar la señal Ref is zero. El umbral para la activación de laseñal se puede ajustar con el parámetro Spd 0 ref thr. También se tieneque tener en cuenta el tiempo de cierre y el tiempo de apertura del frenado.Cuando el drive no controla el frenado o el contactor de salida es posibleajustar los tiempos de retardo correspondientes a cero y aplicar los intervalosde retardo requeridos en el control externo.
Control drive del Contactor & frenoEl diagrama de secuencia del comando estándar muestra la mayoría desecuencias completas en las que el contactor de salida y el frenado estáncontrolados por el drive.El inicio de la secuencia de control del contactor en caso que el contactoresté controlado por el drive depende del modo de inicio de la secuencia delparámetro. En el caso que esté ajustado como Start fwd/rev el contactor secierra cuando se activa el comando Start fwd o Start rev. ¡Para cerrar loscontactores no es necesario el comando Enable! Sólo es necesario iniciarla secuencia de la magnetización del motor y, por lo tanto, se puedeproporcionar utilizando, por ejemplo, el contacto auxiliar del contactor desalida. El drive esperará hasta que se aplique el comando Enable. En elcaso de haber seleccionado Enable, la secuencia de los contactores se iniciacuando se confirme el comando Enable.No son necesarios los comandos Start fwd/rew y uno de ellos debeconectarse a 24V o con más facilidad ajustar la fuente correspondiente aONE. Hasta que no se utilice el comando Start, en esta configuración sedebe obtener velocidad cero a través de la selección de multivelocidad. Elcambio de dirección se debe realizar a través de la selección demultivelocidad donde algunos parámetros están ajustados a valores

114 • Capítulo 8 – Secuencias del ascensor ARTDriveL Manual de instrucciones
negativos o a través del parámetro Ramp ref inv src dirigido a una entradadigital que controla la dirección.En caso que realice la selección Seq start mode = Mlt spd out!=0, lasecuencia se inicia seleccionando cualquier valor multivelocidad distintode cero. Cuando la salida de la selección multivelocidad es cero, equivalea un comando stop.Los comandos de inicio fwd/rev no son necesarios y para su gestión esválido lo que está escrito para activar (Enable) la selección.
En general, la dirección está controlada por los comandos Start fwd/rew,pero si se prefiere se puede utilizar sólo uno de estos comandos y delegarel control de la dirección a una simple selección multivelocidad. Otraposibilidad es utilizar una entrada digital que controle el parámetro Rampref inv src.

ARTDriveL Manual de instrucciones Capítulo 8 – Secuencias del ascensor • 115
Figura 8.1: Secuencia de comandos estándar
MR0 acc ini jerk
MR0 acceleration
MR0 dec ini jerk
MR0 deceleration
MR0 dec end jerk
MR0 end decel
Cont close delay
Ope
nco
ntac
.
Sta
rtFw
/R
w
Clo
seco
ntac
Sta
rtm
agne
t.
Ope
nbr
ake Running
Wai
t0
ref
Clo
sebr
ake
Sta
rtFw
/R
w
Brake open delay
Spd 0 ref delay
Brake close dly
Cont open delay
Start fwd src /Start rev src
Mlt spd s 0 src
Mlt spd s 1 src
Mlt spd s 2 src
Speed ref
Magn. current
RUN cont mon /UP cont mon /
DOWN cont mon
Lift Enable mon
BRAKE cont mon
Lift Start mon
Lift Landing mon
Lift DC brake mon
Slow Down dist
PLC
TOD
RIV
ES
IGN
ALS
DR
IVE
TOP
LCS
IGN
ALS
MR0 acc end jerk
(Only FOC/BRS)
(Only V/F)
Enable
Spd 0 ref thr

116 • Capítulo 8 – Secuencias del ascensor ARTDriveL Manual de instrucciones
Figura 8.2: Inicio detallado
Con
tcl
ose
dela
y
Mag
nra
mp
time
Start fwd src
Mlt spd s 0 src
Speed ref
Magnetization current
BRAKE 2 cont mon
BRAKE cont mon
Lift Start mon
Enable
Bra
keop
ende
lay
Acceleration
Multispeed 1
MR0 acc ini jerk MR0 acceleration MR0 acc end jerk
Spd 0 ref thr
RUN cont mon
Lift Enable mon

ARTDriveL Manual de instrucciones Capítulo 8 – Secuencias del ascensor • 117
Figura 8.3: Detención detallada
Con
top
ende
lay
Spd
0re
fde
lay
Start fwd src
Mlt spd s 0 src
Speed ref
RUN cont mon
Lift Enable mon
BRAKE cont mon
Lift Start mon
Enable
Bra
kecl
ose
dela
y
Lift Landing mon(FOC/BRS only)
Lift DC brake mon(V/F only)
Spd 0 ref thr
Multispeed 1
Multispeed 0
MR
0de
cin
i jer
kMR0 deceleration
Acceleration
MR
0en
dde
cel
MR
0de
cen
dje
rk
MR
0de
cen
dje
rk
MR
0de
cin
i jer
k
BRAKE 2 cont mon

118 • Capítulo 8 – Secuencias del ascensor ARTDriveL Manual de instrucciones
Figura 8.4: Relación entre los comandos de dirección y las señales de control delcontactor
Start rev src
RUN cont mon
For details see Figure 8.3.
Start fwd src
DOWN cont mon
UP cont mon
For details see Figure 8.3.
Speed ref
¡NOTA! Para convertir la señal de Speed ref correspondiente a los comandosStart fwd y Start rev ajuste el parámetro en TRAVEL \ Ramp rev invsrc = UP cont mon.
Speed ref

ARTDriveL Manual de instrucciones Capítulo 8 – Secuencias del ascensor • 119
Figura 8.5: Función plano corto
Short floor mon
MR0
Start fwd / rev src
Mlt spd s0 src
Mlt ramp sel mon
MR0MR1
MR1 acc end jerk > MR0 acc end jerk MR1 dec ini jerk > MR0 dec ini jerk

120 • Capítulo 8 – Secuencias del ascensor ARTDriveL Manual de instrucciones

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 121
Capítulo 9 – Parámetros
9.1 Leyenda de los parámetros
TRATRATRATRATRAVELVELVELVELVEL
TRAVEL / DC braking1836 DCbrake cmd src N/A RWS IPA 7125List 3 PIN V-F-S-B
IPA 7125 Lift DC Brake mon = DefaultIt allows to select the origin of the signal to command DC braking function(refer to signals List 3 of Pick List manual)
Tipo de punto
AB
A puede ser > F mobile (tipo de paleta)> P mobile (tipo de paleta)> D tipo digital (Entero con 16 bits)
B puede ser > P parámetro> V variable> K constante
PATILLA El tipo de parámetro es enumerativo. Por lo tanto, dispone de una lista deposibles valores (por ejemplo es una fuente)
DB de validez
Las teclas de lectura son:F Con orientación de campoS Sin sensorV V/fA Regulación automática (Modo de configuración)B Sin escobillas
IPA Description [Unit] Access Default Min Max Format Reg. Mode
Número de parámetro
Unidad de medida del parámetro
Parámetros del modo de acceso R sólo lectura W tipo escritura S guardado en flash Z accesible con el drive deshabilitado
Valor del parámetroD.Size valor determinado por el tamaño del
driveCalc valor calculado en función de otro
parámetroDrvVer valor según la versión fw del driveMotr valor según el motorList X lista de señales
Nombre del parámetro
Menu principal
2° Nivel
El manual de la Lista de captura está disponible (en formato pdf) en el CD-ROM «CONF 99»suministrado.

122 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
9.2 Descripción del parámetro
MONITORMONITORMONITORMONITORMONITOREste menú visualiza una serie de variables útiles para comprobar el estado del drive. La función variable estáclaramente explicada por el nombre de la variable.
Monitor3060 Output voltage [V] R 0.00 0.00 0.00 PV V-F-S-B
Tensión en los terminales de salida del drive
3070 Output current [A] R 0.00 0.00 0.00 PV V-F-S-BIntensidad en los terminales de salida del drive
3080 Output frequency [Hz] R 0.00 0.00 0.00 PV V-F-S-BFrecuencia de salida del drive
3090 Output power R 0.00 0.00 0.00 PV V-F-S-BPotencia de salida del drive UNIDAD: [kW] para AVy ... AC/AC4, [kVA] para AVy ... BR/BR4.
9406 Torque ref [Nm] R 0.00 0.00 0.00 PV F-S-BDrive torque reference
9405 Norm Speed [rpm] R 0.00 0.00 0.00 PV V-F-S-BReferencia del par del convertidor
3210 Speed ref [rpm] R 0.00 0.00 0.00 PV V-F-S-BReferencia de la velocidad del drive
3200 Ramp ref [rpm] R 0.00 0.00 0.00 PV V-F-S-BReferencia de la rampa del drive
162 Enable SM mon N/A R 0 0 1 DV V-F-S-BMuestra el estado Enable del drive
163 Start SM mon N/A R 0 0 1 DV V-F-S-BMuestra el estado Start del drive0 OFF1 ON
164 FastStop SM mon N/A R 0 0 1 DV V-F-S-BMuestra el estado FastStop del drive0 OFF1 ON
MONITOR / I/O status4028 DI 7654321E N/A R 0 0 1 DP V-F-S-B
Estado de entradas digitales estándares, desde 0 hasta 7; E (Enable) = Entrada digital 0
4064 DO 3210 N/A R 0 0 1 DP V-F-S-BEstado de las salidas digitales estándares, desde 0 hasta 3
4057 DIX BA9876543210 N/A R 0 0 1 DP V-F-S-BEstado de las entradas digitales ampliadas, desde 0 hasta 11;A = Entrada digitalX 10, B = Entrada digitalX 11 (el sufijo X significa ampliado)
4078 DOX 76543210 N/A R 0 0 1 DP V-F-S-BEstado de las salidas digitales ampliadas, desde 0 hasta 7 (el sufijo X significa ampliado)
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 123
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
MONITOR / Advanced Status3100 DC link voltage [V] R 0.00 0.00 0.00 PV V-F-S-B
Tensión del enlace de CC del drive
3110 Magnetizing curr [A] R 0.00 0.00 0.00 PV V-F-S-BIntensidad de magnetización del Drive
3120 Torque curr [A] R 0.00 0.00 0.00 PV V-F-S-BCorriente del par del drive
3130 Magn curr ref [A] R 0.00 0.00 0.00 PV F-S-BReferencia de la corriente magnetizante del drive
3140 Torque curr ref [A] R 0.00 0.00 0.00 PV F-S-BReferencia de la corriente del par del drive
3180 Flux ref [Wb] R 0.00 0.00 0.00 PV F-S-BReferencia del flujo del drive
3190 Flux [Wb] R 0.00 0.00 0.00 PV F-S-BFlujo del drive
1670 Mot OL accum % [%] R 0.00 0.00 0.00 PV V-F-S-BAcumulador de sobrecargas I2t del motor. Cuando se alcanza el 100% se genera una alarma Motoverload y la intensidad de salida del inver ter se reduce a corriente continua.
1781 BU OL accum % [%] R 0.00 0.00 0.00 PV V-F-S-BAcumulador de sobrecargas I2t de la unidad de frenado. Cuando se alcanza el 100% se genera unaalarma BU overload y la intensidad de salida del inverter se reduce a corriente continua.
1540 Drv OL accum % [%] R 0.00 0.00 0.00 PV V-F-S-BAcumulador de sobrecargas I2t de la unidad del Drive. Cuando se alcanza el 100% se genera unaalarma Drv overload y la intensidad de salida del inverter se reduce a corriente continua.
3222 Norm Std enc spd[rpm] R 0.00 0.00 0.00 PV V-F-S-BLa velocidad del encoder de la realimentación estándar (conector «XE»en la tarjeta de regulación RV33)
3223 Norm Exp enc spd [rpm] R 0.00 0.00 0.00 PV V-F-S-BLa velocidad del encoder de la realimentación ampliada (conector del encoder en las tarjetas deexpansión opcionales)
9553 Std enc position [cnt] R 0.00 0.00 0.00 PV F-BImpulsos brutos de encoder acumulados del encoder estándar, medidos en ppr x 4
9554 Exp enc position [cnt] R 0.00 0.00 0.00 PV F-BImpulsos brutos de encoder acumulados del encoder ampliado, medidos en ppr x 4
9204 Std sin enc mod [cnt] R 0.00 0.00 0.00 PV F-BMódulo del trazo “A” y “B” del encoder sinusoidal en el puerto std. El voltaje de pico del encoderestá constantemente controlado y la pérdida de realimentación de la velocidad de alarma se genera si seencuentra fuera del intervalo: mín=IPA 1902/5, máx=IPA 1902 * 2.
9072 HT sensor temp [°C] R 0.00 0.00 0.00 PV V-F-S-BTemperatura del radiador del drive
9073 RG sensor temp [°C] R 0.00 0.00 0.00 PV V-F-S-BTemperatura en la tarjeta de regulación RV33
9095 IA sensor temp [°C] R 0.00 0.00 0.00 PV V-F-S-BTemperatura de la temperatura del aire entrante del radiador (disponible desde 18.5kW hasta 160kW)
9090 Sequencer status N/A R 0.00 0.00 - - - DV V-F-S-BEl estado del secuenciador del Equipo de estado del drive. Controla el inicio y funcionamiento del drive,teniendo en cuenta la protección y el sistema de alarma, la secuencia de comandos y el estadoderestablecimiento.

124 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Estado del secuenciador de estado1 Funcionamiento de la magnetización2 Magnetización completada, Parada3 Arranque4 Parada de emergencia, Parada5 Parada de emergencia, Arranque9 Sin alarma, el drive está preparado para aceptar todos los comandos10 El funcionamiento de la magnetización y el comando de Arranque están presentes12 Alarma activada16 Alarma desactivada, esperando el restablecimiento
3230 CPU1 runtime [%] R 0.00 0.00 0.00 PV V-F-S-BTiempo necesario para el CPU1 (microprocesador)
3240 CPU2 runtime [%] R 0.00 0.00 0.00 PP V-F-S-BTiempo necesario para el CPU2 (microprocesador)
MONITOR - Drive ID Status1460 Drive cont curr [A] RW CALC 0.00 0.00 FK V-F-S-B
En los valores máximos de corriente continua del drive, su valor por defecto depende del tamaño deldrive y de sus factores de derating aplicables.
114 Drive size N/A R D.Size 0 20 DK V-F-S-BLos valores del tamaño del drive en kW (ULN = 400VAC, IEC 146 de la clase 1) de Hp (ULN =460VAC, IEC 146 de la clase 2):0 0.75 kW - 0.75 Hp1 1.5 kW -1.5 Hp2 2.2 kW - 2.0 Hp3 3.0 kW - 3.0 Hp4 4.0 kW - 5.0 Hp5 5.5 kW - 7.5 Hp6 7.5 kW - 10 Hp7 11 kW - 15 Hp8 15 kW - 20 Hp9 22 kW - 25 Hp10 30 kW - 30 Hp11 37 kW - 40 Hp12 45 kW - 50 Hp13 55 kW - 60 Hp14 75 kW - 75 Hp15 90 kW - 100 Hp16 110 kW - 125 Hp17 132 kW - 150 Hp18 160 kW - 200 Hp19 250 kW - 300 Hp20 315 kW - 450 Hp21 18.5 kW - 22.5 Hp22 400 kW - 500 Hp23 500 kW - 600 Hp24 630 kW - 700 Hp
300 Drive type N/A R 288 0 0 DK V-F-S-B288 ajustes por defecto de 460V para AVy ... AC/AC4289 ajustes por defecto de 460V para AVy ... BR/BR434 ajustes por defecto de 400V para AVy ... AC/AC4

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 125
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
35 ajustes por defecto de 400V para AVy ... BR/BR4
115 Drive name N/A RWS 0.00 0.00 0.00 FK V-F-S-BACDRV firmware asíncronoACDRVM firmware sin escobillas
810 Actual setup N/A R 0 0 0 DK V-F-S-BArchivo del motor de la configuración en uso (reservado)
107 Software versionVersión del software del drive (instalado de fábrica), por ejemplo: V 3. 0. 0
110 Software type N/A R DrvVer 0 0 DV V-F-S-BTipo de software de utilización en fábrica
111 Software status N/A R DrvVer 0 0 DV V-F-S-BEstado del software de utilización en fábrica
99 Life time [hrs] R 0.00 0.00 0.00 PV V-F-S-BDuración del drive acumulada con habilitación
98 Sys time-ddmmyy [h/m/s] R 0.00 0.00 0.00 PV V-F-S-BAjuste de tiempo y fecha desde el configurador de PC o las comunicaciones en serie.El reloj sólo se activa cuando el drive está activado¡NOTA! En una nueva tarjeta de regulación la variable adquiere un valor: 00:00:00 (tiempo) 010170 (fecha)
MONITOR / Alarm logEsta función proporciona una lista de las últimas 30 desconexiones del drive o varios mensajes de error delsistema. Junto con las indicaciones de la causa también proporciona información del tiempo y la fecha. Elmensaje de registro de alarma hace referencia a la variable “Sys time - dd mm yy”.
Ejemplo:01:02:36 01 02 00Bajo voltaje
01:02:36 tiempo de alarma02 02 00 fecha de alarmaUndervoltage descripción de la alarma
MONITOR / Alarm log clear?Elimina todas las alarmas listadas en el registro de alarmas.

126 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
STSTSTSTSTARTUPARTUPARTUPARTUPARTUP
STARTUP / Startup config / Enter setup modeIntroducir el comando del modo de configuración permite acceder al SETUP MODE para ajustar los parámetrosbásicos del drive y la información de la placa del motor. El drive se reiniciará y serán necesarios unos segundos.Todos los cambios y operaciones realizadas en el SETUP MODE se guardarán automáticamente,cada vez que el usuario salga el modo de configuración.
SETUP MODE / Drive data380 Mains voltage [V] RW 2 0 5 DK V-F-S-B
Voltaje de la fuente de alimentación del drive. Seleccione con precisión el parámetro del voltaje dealimentación, con relación al drive actual voltaje de alimentación. Después de cambiar este parámetro, ¡lainformación de autorregulación se inicializa por defecto y la auto sintonización debe repetirse!0 230 V1 380 V2 400 V3 415 V4 440 V5 460 V
1350 Ambient temp [°C] RW 0 0 1 DK V-F-S-BTemperatura ambiente del drive. Seleccionar 50°C provocará un derating del drive, consulte elcapítulo 2.3. Después de cambiar este parámetro, ¡la información de autorregulación se inicializapor defecto y la auto sintonización debe repetirse!0 40°C1 50°C
170 Switching freq [kHz] RW D.Size 0 3 DK V-F-S-BFrecuencia de conmutación PWM del drive. Seleccionar la frecuencia de conmutación mayor, pordefecto, provoca un derating del drive, consulte la tabla 2.3.2.1. Seleccionar el valor inferior provoca unacorriente de salida continua mayor. Después de cambiar este parámetro, ¡la información deautorregulación se inicializa por defecto y la auto sintonización debe repetirse!0 2 kHz1 4 kHz2 8 kHz3 16 kHz4 12 kHz (a partir de la versión 3.4XX del software)
1880 Spd ref/fbk res [rpm] RW 1 0 5 DK V-F-S-BResolución de las referencias de velocidad relacionadas con la velocidad máxima del proceso(1885. Parámetro “Full scale speed”). Después de cambiar este parámetro, la información deautorregulación se inicializa por defecto, ¡la auto sintonización debe repetirse!0 0.125 rpm -> velocidad máxima del proceso de 2048 rpm1 0.250 rpm -> velocidad máxima del proceso de 4096 rpm2 0.500 rpm -> velocidad máxima del proceso de 8192 rpm3 1.000 rpm -> velocidad máxima del proceso de 16384 rpm4 0.03125 rpm -> velocidad máxima del proceso de 512 rpm
SETUP MODE / Motor data (para la serie AVy . AC)670 Rated voltage [V] RW D.Size Calc Calc FK V-F-S-B
Voltaje nominal del motor
680 Rated frequency [Hz] RW D.Size Calc Calc FK V-F-SFrecuencia nominal del motor

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 127
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
690 Rated current [A] RW D.Size Calc Calc FK V-F-S-BCorriente nominal del motor¡NOTA! El valor no debería ser inferior a aproximadamente 0,3 veces la corriente nominal del drive
(corriente de salida de la clase 1 @ 400V en la placa del motor).
700 Rated speed [rpm] RW D.Size Calc Calc FK V-F-S-BVelocidad de carga completa del motor en la frecuencia nominal. Si en la información de la placa delmotor está disponible el desplazamiento, ajuste el parámetro «Rated speed» de la siguiente manera:Rated speed = Velocidad síncrona – Desplazamiento
710 Rated power [kW] RW D.Size Calc Calc FK V-F-SPotencia nominal del motor¡NOTA! Para una placa de motor medida en Hp, ajuste la potencia nominal kW = valor Hp del motor * 0,736
720 Cosfi N/A RW D.Size Calc Calc FK V-F-SFactor de potencia nominal del motor
730 Efficiency N/A RW D.Size Calc Calc FK V-F-SEficacia del motor (si no está disponible, deje la información por defecto)
Load default motSelecciona y carga los parámetros estándares del motor:0 400V estándares1 460V estándares
¡NOTA! Al seleccionar una de las dos opciones, los parámetros estándar del motor con 400V(ó 460V) se cargan en referencia al tamaño del Drive que se utilice. A través de esteproceso, se sobrescribe la información del motor.
SETUP MODE / Motor data (per la serie AVy . BR)670 Rated voltage [V] RW D.Size Calc Calc FK V-F-S-B
Voltaje nominal del motor
690 Rated current [A] RW D.Size Calc Calc FK V-F-S-BCorriente nominal del motor¡NOTA! El valor no debería ser inferior a aproximadamente 0,3 veces la corriente nominal del drive
(corriente de salida de la clase 1 @ 400V en la placa del drive).
700 Rated speed [rpm] RW D.Size Calc Calc FK V-F-S-BVelocidad síncrona del motor
930 Pole pairs N/A RW 4.0 0.0 0.0 FK BDebe ser un número entero.
990 Torque constant [Nm/A] RW D.Size 0.0 0.0 FK BPar motor constante. Este parámetro suele venir definido por el fabricante del motor. Si no, puedecalcularse a partir de la potencia nominal del motor, velocidad e intensidad de la forma:
Torque Constant =P [W]
2 . S [rpm] . I [A]
60Intensidad en unidades de par constante [Nm/A es la intensidad RMS.
775 EMF constant [V.s] RW D.Size 0.0 0.0 FK BSi el número es desconocido, ajuste el parámetro a cero: el drive calculará automáticamente un valoraproximado.

128 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.970 Stator resistance [ohm] RW D.Size 0.0 0.0 FK B
Valor de la resistencia estator del motor.
980 LsS inductance [H] RW D.Size 0.0 0.0 FK BValor de la inductancia del estator del motor¡NOTA! Si los valores “EMF Constant”, “Stator resistance” y “LsSinductance” no se conocen, ajústelos a
cero antes de hacer funcionar el procedimiento de auto sintonización de la corriente.Load default mot
Selecciona y carga los parámetros estándares del motor:0 Set 01 Set 1¡NOTA! Con esta selección, los parámetros estándares del motor con “Set 1” (o “Set 2”) están
cargados y hacen referencia al tamaño del drive utilizado. A través de este proceso sesobrescribe la información del motor.
SETUP MODE / AutotuneComplete still (para la serie AVy . AC)
Completa la auto sintonización de la corriente y del bucle de flujo con un rotor parado. “Star t ?” habilitael comando de detección de información (el terminal 12 del drive debe tener un ciclo de +24Vdc)
Complete rot (para la serie AVy . AC)Completa la auto sintonización de la corriente y del bucle de flujo con un rotor en movimiento. “Start ?”habilita el comando de detección de información (el terminal 12 del drive debe tener un ciclo de+24Vdc)
CurrReg (para la serie AVy . AC e BR)Sólo la auto-sintonización del bucle de corriente con el motor parado. “Start ?” habilita el comando dedetección de información (el terminal 12 del drive debe tener un ciclo de +24Vdc)
FluxReg rot (para la serie AVy . AC)Sólo la auto sintonización del bucle de flujo con un rotor en movimiento. “Start ?” habilita el comando dedetección de información (el terminal 12 del drive debe tener un ciclo de +24Vdc)
FluxReg still (para la serie AVy . AC)Sólo la auto sintonización del bucle de flujo con un rotor parado. “Start ?” habilita el comando dedetección de información (el terminal 12 del drive debe tener un ciclo de +24Vdc)
SETUP MODE / Autotune / Results2780 Measured Rs [ohm] RW Calc Calc Calc FK V-F-S-B
Se ha detectado el valor de la resistencia de fase en el estátor del motor2790 Measured DTL [V] RW Calc 0 Calc FK V-F-S-B
Límite de tiempo muerto de IGBT2800 Measured DTS [ohm] RW Calc 0 Calc FK V-F-S-B
Pendiente de tiempo muerto de IGBT2810 Measured LsSigma [H] RW Calc Calc Calc FK V-F-S-B
Se ha detectado el valor de inductancia en el estátor del motor2820 Measured Rr [ohm] RW Calc Calc Calc FK V-F-S
Se ha detectado el valor de resistencia en el rotor del motor2830 Measured Rr2 [ohm] RW Calc Calc Calc FK V-F-S
Se ha detectado el valor de resistencia 2 en el rotor del motor2840 Measured P1 flux N/A RW Calc 0.00 1.000 FK V-F-S
Se ha medido el coeficiente P1 de la curva de flujo2850 Measured P2 flux N/A RW Calc 3 18 FK V-F-S
Se ha medido el coeficiente P2 de la curva de flujo2860 Measured P3 flux N/A RW Calc 0.00 1.00 FK V-F-S
Se ha medido el coeficiente P3 de la curva de flujo

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 129
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.2870 Measured Im Nom [A] RW Calc 0.00 0.00 FK V-F-S
Valor de la corriente magnetizante nominal2880 Measured Im Max [A] RW Calc 0.00 0.00 FK V-F-S
Valor de la corriente magnetizante máxima2890 Measured Flux Nom [Wb] RW Calc 0.00 0.00 FK V-F-S
Valor del flujo nominal2900 Measured Flux Max [Wb] RW Calc 0.00 0.00 FK V-F-S
Valor del flujo máximo
STARTUP / Startup config / Load setupLoad setup
Se requiere el comando de configuración de la carga para cargar todos los ajustes del SETUP MODE enel modo de regulación seleccionado. Al introducir este parámetro, en la pantalla aparecerá:Load setup?Yes -> Ent No -> Esc• Pulse Enter para cargar los ajustes del SETUP MODE.• Pulse Escape si no quiere cargar los ajustes del SETUP MODE
¡NOTA! Se requiere la operación para cada modo de regulación (V, F, S y B)También se requiere para cada nuevo ajuste que se realice en el SETUP MODE.
Si se detecta cualquier cambio/ajuste en los datos del motor y del Drive (Motor data, Drive data) sepresenta automáticamente al usuario el comando de configuración de carga, responder Yes (Sí) paracargar los datos.
STARTUP / Startup config / Mechanical data1015 Travel units sel N/A RWZ 0 0 1 DK V-F-S-B
0 Revoluciones1 MilímetrosDetermina las unidades de los parámetros del menú “TRAVEL/Speed profile” y “TRAVEL/Ramp profile”:Revoluciones= rpm, rpm/s e rpm/s2 - Milímetros= mm/s, mm/s2 e mm/s3
1002 Gearbox ratio N/A RWZ 35 1 100 FK V-F-S-BRelación entre la velocidad del eje del motor y la velocidad de la polea También se debe incluir larelación eventual de la cuerda.
1003 Pulley diameter [mm] RWZ 500 100 2000 FK V-F-S-BDiámetro de la polea
1885 Full scale speed [rpm] RW 1500 Calc Calc PV V-F-S-BDDefine el 100% de la velocidad de aplicación mencionada. La gama de gestión de la velocidad absolutaes de ± 200%. Velocidad a gran escala Para laaplicación del ascensor ajuste este parámetro a la velocidad máxima permitida del motor, generalmentela velocidad nominal del motor.Este parámetro también ajustará el límite en todos los valores de multivelocidad IPA 7060 - 7067.
STARTUP / Startup config / Weights1004 Car weight [kg] RWZ 0.00 0.00 0.00 FK V-F-S-B
Peso de la cabina
1005 Counter weight [kg] RWZ 0.00 0.00 0.00 FK V-F-S-BPeso de la masa del contador para conseguir un sistema equilibrado
1006 Load weight [kg] RWZ 0.00 0.00 0.00 FK V-F-S-BPeso máximo de la carga del ascensor (peso total de personas)

130 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
1007 Rope weight [kg] RWZ 0.00 0.00 0.00 FK V-F-S-BPeso total de la cuerda
1011 Motor inertia [kgm2] RWZ 0.000 0.000 0.000 FK V-F-S-BInercia del motor, consulte al fabricante del motor (si no está disponible, deje el valor por defecto)
1012 Gearbox inertia [kgm2] RWZ 0.000 0.000 0.000 FK V-F-S-BInercia de la caja de velocidades, consulte al fabricante (si no está disponible, deje el valor por defecto).Aquí se puede ajustar la inercia de todas las partes mecánicas en la parte lenta de la caja deherramientas (por ejemplo, la polea, etc...)
PulleyMotor Gearbox
Pulley diameter
Rope weight
Car weight
Load weight
Counter weight
Gearbox ratio
STARTUP / Startup config / Landing zone9411 Landing control N/A RWZ 0 0 1 DP F-B
0 Deshabilitado1 HabilitadoHabilitar/Deshabilitar el control de la posición exhaustiva en la zona de aterrizaje
9419 Landing init src N/A RWSZ IPA 7124List 3 PIN F-BIPA 7124 Lift Landing mon = Por defectoPermite seleccionar la señal para inicializar el control de la posición del bucle cerrado en la zona deaterrizaje (deje el valor por defecto si el aterrizaje debería estar gestionado por la secuencia de controlinterna del ascensor; consulte la Lista 3 de las señales del manual de la Lista de captura)
9412 Landing distance [mm] RWZ 100 10 1000 PP F-BDistancia total entre la señal de la zona de aterrizaje y la posición del suelo. Un valor más elevadopermite una ubicación más rápida.
9420 Landing ratio [%] RWZ 50 0 90 PP F-BPorcentaje de la distancia de aterrizaje durante la cual la cabina se desplaza a una velocidad constante
9417 Pos P gain [%] RWZ 1 0 100 PP F-BGanancia proporcional del regulador de posición

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 131
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9410 Pos speed limit [rpm] RWZ 200 0 Calc PP F-BVelocidad máxima permitida para utilizar con el controlador de posición
Landing ratio
t
0
Landing distance
1
Position
Speed
Landing init src
Landing distance
Floor level
Landing sensor
Lift car
La salida del sensor de aterrizaje puede conectarse al drive mediante un interface a través de laentrad digital que se puede convertir en comando para inicializar el control de aterrizaje.
SpeedProfileGenerator
PositionProfileGeneration -
+
+
+
Position
Pos P Gain
Pos Speed Limit
LZ speed ref
connected to Speed ref 1 src
STARTUP / Startup config / Encoders config1940 Speed fbk sel N/A RW 0 0 1 DV V-F-B
0 Std encoder1 Exp encoderPermite conmutar la realimentación entre el puerto estándar del encoder «XE» (en la tarjeta de regulaciónRV33) y el encoder ampliado (desde las tarjetas opcionales del encoder: EXP-F2E y EXP-D14A4F)¡NOTA! El encoger de expansión no se puede utilizar para la realimentación de la velocidad en el
modo sin escobillas.
1925 Std enc type N/A RWZ 0 12 DK V-F-BTipo de encoder conectado a la entrada estándar. Por defecto: 1 para AVy ... AC/AC4, 4 para AVy ... BR/BR4
Ajuste permitido para AVy ... AC/AC4:0 Sinusoidal encoder sinusoidal, selecciona el puente correcto ajustado en la tarjeta de
reg. RV331 Digital encoder digital2 Frequency input entrada de frecuencia del único canal digital: el canal A.
Señal +5V debe conectarse entre A y la fuente de alimentación común.
Ajuste permitido para AVy ... BR/BR4:3 Sinusoidal Hall encoder incremental sinusoidal con trazos A+ / A-, B+ / B-, C+ / C y tres
trazos de posición absoluta «Hall sensor» digitales para la sincronizacióninicial (ajuste de fábrica)
4 Sinusoidal SinCos encoder incremental sinusoidal con trazos A+ / A-, B+ / B-, C+ / C- y dostrazos de posición absoluta Sin/Cos para la sincronización inicial
5 Sinusoidal Extern encoder incremental sinusoidal con trazos A+ / A-, B+ / B- y informaciónde posición absoluta a través del interface de la serie SSI para la

132 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.sincronización inicial (requiere la tarjeta APC)
6 Digital Hall encoder incremental digital con trazos A+ / A-, B+ / B-, C+ / C- y trestrazos de posición absoluta «Hall sensor» digitales para la sincronizacióninicial (ajuste de fábrica)
7 DigitalExtern encoder incremental digital con trazos A+ / A-, B+ / B- y información deposición absoluta a través del interface de la serie SSI para la sincronizacióninicial (requiere la tarjeta APC)
8 SinCos Trazos de posición absoluta Sin/Cos para la sincronización inicial, lainformación incremental no se utiliza.
9 Resolver resolución utilizando tarjetas de opciones: EXP-RES (consulte su manualpara las configuraciones de los puentes 0)
10 Hiperface encoder absoluto con protocolo de Hiperface (a partir de la versión 3.300 delsoftware)
11 Sinusoidal Intern encoder incremental sinusoidal con trazos A+ / A-, B+ / B-, C+ / C-, lostrazos de posición absoluta no son necesarios ya que la sincronización defase se realiza de forma automática en cada puesta en marcha (a partir dela versión de software 3.500)
12 Digital Intern encoder incremental digital con trazos A+ / A-, B+ / B-, C+ / C-, los trazosde posición absoluta no son necesarios ya que la sincronización de fase serealiza de forma automática en cada puesta en marcha (a partir de laversión de software 3.500)
13 Sinusoidal EnDat encoder incremental sinusoidal con trazos A+ / A-, B+ / B- y informaciónde posición absoluta a través del interface de la serie EnDat para lasincronización inicial (requiere la tarjeta EXP-ENDAT-AVy).(a partir de la versión de software 3.600)
1890 Std enc pulses [ppr] RWZ 1024 Calc Calc FK V-F-S-BValor de impulsos por revolución (ppr) del encoder de la entrada estándar. Para los motores sinescobillas es posible utilizar sólo los siguientes valores: 512, 1024, 2048, 4096, 8192.
1931 Std dig enc mode N/A RWZ 0 0 1 DP V-F-S-B0 FP frecuencia del modo y medida del período1 F medida de la frecuencia del modoMétodo de medida de la velocidad del encoder digital conectado a la entrada estándar
1927 Std enc supply N/A RWZ 0 0 3 DP V-F-S-B0 5.41 / 8.16 V1 5.68 / 8.62 V2 5.91 / 9.00 V3 6.16 / 9.46 VLa selección en el rango 5V / 8V se realiza mediante el conmutador DIP S28.Voltaje de la fuente de alimentación de la entrada estándar del encoder. Aumente este valor en el caso deun cable del encoder largo.
1902 Std sin enc Vp [V] RW 0.5 0 1.5 FK V-F-BValor del voltaje de pico del encoder sinusoidal conectado a la entrada estándar
1300 Std enc cnt dir N/A RWSZ 0 0 1 DP V-F-S-B0 Not inverted1 InvertedSelección de una dirección de recuento del encoder estándar. Permite cambiar el signo de la velocidadmedida, equivale al intercambio de los canales del encoder AA- <-> BB-.
1926 Exp enc type N/A RW 1 1 2 DK V-F-BTipo de encoder conectado a la entrada ampliada

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 133
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.1 Digital encoder digital2 Frequency input ientrada de frecuencia del único canal digital: el canal A.Señal +5V debe conectarse entre A y la fuente de alimentación común.
¡NOTA! Para motores sin escobillas, no se puede utilizar el encoder ampliado para la realimentaciónde la velocidad. Sólo se puede utilizar para ajustar la referencia de velocidad.
1900 Exp enc pulses [ppr] RWZ 1024 Calc Calc FK V-F-BValor de impulsos por revolución (ppr) del encoder de la entrada ampliada.
1301 Exp enc cnt dir N/A RWSZ 0 0 1 DP V-F-B0 Not inverted1 InvertedSelección de la dirección de recuento del encoder de ampliación. Permite cambiar el signo de lavelocidad medida, equivale al intercambio de los canales del encoder AA- <-> BB-.
STARTUP / Startup config / Encoders config / Rep/Sim encoder1962 Rep/Sim enc sel N/A RWZ 0 0 1 DK V-F
Selección del encoger para repetirse con la tarjeta opcional EXP-F2E.0 Repeat std enc encoder estándar de repetición1 Repeat exp enc encoder ampliado de repetición2 Simulate std sencoder incremental digital de simulación en el caso del SinCos o del Resolver
selecciones como dispositivos de realimentación en el parámetro Std enc type.
1952 Sim enc pulses N/A RWZ 1024 1 Calc FK BValor de los impulsos por revolución (ppr) del encoger simulado (ajuste de fábrica = 1024 ppr)
STARTUP / Startup config / Encoders config / Index storing9550 Index storing en N/A RWSZ 0 0 3 DV F-B
Función de almacenaje del índiceLos recuentos del encoder se pueden bloquear permitiendo al usuario determinar la posición delencoder con relación a la posición absoluta.
0 Off1 Storing enabled permite capturar el recuento del encoder como se describe con el ajuste
de la palabra de control. La palabra de control es el valor de «Int IS ctrl» ola palabra seleccionada por «IS ctrl src»
2 Control std enc constantemente lee todos los impulsos generados en el encoger est3 Control exp enc constantemente lee todos los impulsos generados en el encoger amp
9551 Int IS ctrl N/A RWS 0 0 0X0000 DV F-BProgramación fijada en la Función de almacenaje del índice según la siguiente tabla.
9557 IS ctrl src N/A RWSZ IPA 9551List 39 PIN F-BIPA 9551 Int IS ctrl = Por defectoPermite seleccionar el origen de la señal para el comando «Index storing function».Por ejemplo, una palabra SBI o DGFC (consulte la Lista 39 de señales del manual de la Lista de captura)
¡NOTA! Las entradas 6 y 7 digitales (terminales 38 y 39) están destinadas al uso del «Calificador deíndice» (conmutación de la posición de inicio) cuando se habilita el almacenaje del Índice.
En la siguiente tabla se muestran los valores de IS ctrl src de la palabra SBI, la palabra DGFC o Int IS ctrl cuando:IS ctrl src = Int IS ctrl

134 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Núm.
de bitNombre Descripción
Acceso
(Lectura/
Escritura)
Por
defecto
0-1 - No utilizado - -
Indica la polaridad del borde del índice del encoder:0= borde en elevación
1= borde de caída
3 - No utilizado - -Ajusta el estado de entrada del calificador para activar la lectura de índice del
encoder:=0, desactivado cuando la entrada dig. 7 = 0
=1, desactivado cuando la entrada dig. 7 = 1=2, a través de la señal = 0
=3, a través de la señal = 1Señala el encoder para el cual se indican los valores de este parámetro:=0, operaciones requeridas en la entrada del encoder est.=1, operaciones requeridas en la entrada del encoder amp.
7 - No utilizado - -La función de control de la lectura de índice del encoder:=0, desactivado, función deshabilitada
=1, una vez, sólo habilita la lectura del primer borde de señal de índice.=2, continuo, habilita la lectura de la señal de índice.
TAV13241
0L/E
E 0
2
4-5
6
POLNLT
ENNQUAL
Target Enc
NumL/E 0
8-9 L/E 0ENNLT
Para la función de almacenaje del índice, los registros del estado no están disponibles a través delteclado y se tienen que utilizar para la configuración y la lectura de la información. Son:registro de índice L IPA9556registro de índice H IPA9555Los valores de los registros se muestran en la siguiente tabla:
IpaNúm.
de bitNombre Descripción
Acceso(Lectura/Escritura)
Por
defecto
Indica el encoger que se utiliza para guardar el índice:=0, la información del registro hace referencia a la entrada del encoder est.=1, la información del registro hace referencia a la entrada del encoder amp.Valor de entrada del calificador actual (entrada digital 7):=0, el nivel de entrada del calificador es bajo=1, el nivel de entrada del calificador es altoEstado de la función de adquisición, como:0=DESACTIVADO
1=Una vez, el almacenaje aún no está ejecutado1=Una vez, el almacenaje ya está ejecutado3=ContinuoValor del contador de posición correspondiente al índice.El valor sólo es válido cuando STANLT es igual a 2 o 3
indexstorpar
Source Enc
Num
9556
9555
0
1
2-3
0-15
MP_IN
STATNLT
CNTNLT
L
L
0
0
0
0
L
L
1936 Motor pp/sens pp N/A RW Calc Calc 32 PP BRadio entre los pares de polos del motor y los pares de poles del sensor de realimentación,generalmente se utiliza para la resolución.
STARTUP / Startup config / SpdReg gain calc2048 Calc method N/A RWZ 0 0 1 DK F-S-B
Con «Calc method» se pueden seleccionar dos métodos de cálculo de la ganancia:0 Variable bandw la anchura de banda de la regulación de la velocidad se selecciona
internamente según el principio de que la anchura de banda disminuye altiempo que la inercia aumenta
1 Fixed bandw la anchura de banda de la regulación de la velocidad viene especificada porel parámetro «Bandwidth»

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 135
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.Permite realizar el cálculo de la ganancia del regulador de velocidad. La inercia se debe introducir através del parámetro «Calc Inertia» o especificando los parámetros en el menú Weights.
2610 Calc Inertia [kgm2] RWZ D.Size 0 0 FK F-S-BInercia de la carga. Cuando se hayan ajustado los parámetros del menú Weights, el resultado de lainercia del sistema referente al eje del motor se ajusta en este parámetro.
2049 Bandwidth [rad/s] RWZ 50 1 400 FK F-S-BAnchura de banda del regulador de velocidad. El valor de la anchura de banda mayor hace que elmotor responda con más rapidez y que el resultado general esté más bien controlado.
STARTUP / Startup config / V/f config3420 V/f voltage [V] RWZ Motr Calc Calc FK V
Voltaje base para el modo V/f. Este parámetro está ajustado con relación al voltaje nominal del motor,pero se puede cambiar para modificar la característica V/f.
3430 V/f frequency [Hz] RWZ Motr 5 Calc FK VFrecuencia base para el modo V/f. Este parámetro está ajustado con relación a la frecuencia nominaldel motor, pero se puede cambiar para modificar la característica V/f.
V
V/f frequency
f
V/f voltage
STARTUP / Startup config / Motor protectionLa función I2t es parecida a la protección del motor por el relé térmico. Indica el comportamiento típico I2t. Elestado del integrador viene determinado por Mot OL accum %, que nos da el estado en porcentaje de laintegración de la intensidad Rms, 100 % = I2t alarm level. La señal Mot OL trip está disponible en lasselecciones de la lista «Pick List». Indica que la condición de desconexión de I2t se ha alcanzado y que no sepermite sobrecarga. El tiempo de intervención depende del valor de la corriente del motor de la siguiente manera:
(Motor Rated current * Service factor * Motor OL factor )^2* Motor OL timeOverload time = ——————————————————————————————
(Motor current)^2
Es posible generar una alarma o reducir la corriente de sobrecarga final a la corriente nominal del motor. Paradiversas opciones de configuración de alarma, consulte el menú ALARM CONFIG / Sobrecarga del motor.1612 Motor OL control N/A RW 0 0 1 DK V-F-S-B
0 Deshabilitado1 HabilitadoEl control límite de corriente del motor habilitado / deshabilitado y la función de protección I2t desobrecarga (a partir de la versión 3.300 del software).
1611 Service factor N/A RW 1 0.5 1.5 FK V-F-S-BFactor de servicio. Algunos motores tienen una corriente del motor (Ic) superior a la nominal (In). Elfactor de servicio hace referencia al radio Ic/In.
1610 Motor OL factor N/A RW 2 1.2 Calc FK V-F-S-BFactor permitido de sobrecarga del motor referente a la corriente nominal del motor * Factor de servicio
1650 Motor OL time [sec] RW 30 10 Calc FK V-F-S-BTiempo de sobrecarga permitido con nivel de sobrecarga igual al factor OL del motor.

136 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
[%]
t [sec](1) 100
150
(2) 200
250
300
0 15 30(3)
45
(1) Rated current • Service factor = 100%(2) Motor OL factor(3) Motor OL time
STARTUP / Startup config / BU protectionLa función protege la resistencia de frenado con la corriente de control en la resistencia según lacaracterística I2t. Cuando la protección se activa, es posible general una condición de alarma. Según losdiferentes casos es posible utilizar el IGBT interno del dispositivo (o unidad de frenado externa).
1700 BU control N/A RWZ 1 0 2 DP V-F-S-B0 Desactivado Función deshabilitada1 Interno Habilita el dispositivo interno de la Unidad de frenado (Por defecto)2 Externo Habilita el dispositivo BUy externo de la unidad de frenadoEl parámetro habilita la función de la unidad de frenado.
1740 BU resistance [ohm] RWZ D.Size Calc 10000 FK V-F-S-BValor de resistencia de la unidad de frenado, instalada de forma opcional en los terminales de lasección de alimentación o de forma externa (C & BR1)
1710 BU res cont pwr [kW] RWZ D.Size 0 0 FK V-F-S-BPotencia continua de resistencia de la unidad de frenado
1720 BU res OL time [sec] RWZ D.Size 1 1000 FK V-F-S-BTiempo permitido de sobrecarga de resistencia referente a la potencia de la sobrecarga. El control de launidad de frenado externa y de la protección I2t de resistencia es independiente del tipo de BU (elcomando de salida digital de la BU está disponible en los terminales de la tarjeta de regulación).
1730 BU res OL factor N/A RWZ D.Size 1.2 20 FK V-F-S-BFactor permitido de sobrecarga referente a la potencia de sobrecarga de la resistencia de frenado.Factor de sobrecarga = potencia de sobrecarga / potencia nominal
t [sec](1)
(2)
0 (3)
(1) BU res cont power(2) BU res OL factor
(3) BU res OL time

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 137
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
STARTUP / Startup config / Load default ?Load default ?
Restablecimiento del drive con los valores del parámetro por defecto sólo en el modo de regulaciónseleccionado. Cada modo de regulación tiene su propio comando “Load default ?”.¡NOTA! El commando “Load default ?” no restablece el SETUP MODE con valores de parámetros por
defecto; el drive, la información del motor y los valores de regulación automática se mantienen.Use el comando Save config para guardar los parámetros por defecto de forma que se conserven en lasiguiente puesta en marcha.
STARTUP / Startup config / Load saved ?Load saved ?
Recarga de la última base de datos seleccionada guardada.
STARTUP / Regulation mode100 Regulation mode N/A R 0 0 3 DK V-F-S-B
Permite seleccionar el modo de regulación deseado. Cuando el parámetro del modo de regulación estáseleccionado, se visualiza el modo de regulación activado, para cambiarlo a un nuevo modo pulse“Enter”, se visualizará Seleccione un nuevo modo, y luego desplácese por la lista:0 Control V/f1 Con orientación de campo2 Sin sensor3 Modo de configuración (motores asíncronos)4 Sin escobillas5 Modo de configuración (motores sin escobillas)Después de seleccionar el nuevo modo de regulación, es posible copiar (transferir) parámetros desde elanterior modo de regulación. Esta operación resulta adecuada si el drive se ha parametrizado en elanterior modo de regulación (a partir del software versión 3.500).¡NOTA! Utilizando el drive en el modo sin escobillas se requiere el firmware apropiado
STARTUP / Import recipeEl usuario puede guardar su configuración de parámetros en un archivo para una aplicación determinada.Recuperando el archivo de registro adecuado se conseguirá aplicar todos los parámetros necesarios en una solaoperación. Los archivos de registro deben contener los parámetros necesarios que se determinen en fábrica(contacte con el fabricante del drive). La configuración por defecto dispone de 7 archivos de registro vacíos. Sólopueden incluirse en los archivos de registro los parámetros fuera del menú STARTUP.
Seleccione la fórmula:1 User 12 User 23 User 34 User 45 User 56 User 67 User 7
STARTUP / Save config ?El drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:
• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”
Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado. Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.

138 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”
TRATRATRATRATRAVELVELVELVELVEL
TRAVEL / Speed profileLa unidad de los parámetros está definida por IPA 1015 en el menú “STARTUP / Startup config / Mechanical data”,cambiando los ajustes IPA 1015 desde [0] Revolutions (valor por defecto) hasta [1] Millimeters, las unidades en este menúcambian de la forma siguiente:[rpm] pasa a [mm/s], [rpm/s] pasa a [mm/s2], [rpm/s2] pasa a [mm/s3].
7110 Smooth start spd [rpm] RWS 0 Calc Calc PP V-F-S-BLa velocidad de arranque suave se selecciona automáticamente después del comando de arranque(start) independientemente de los valores multivelocidad. La duración de esta velocidad especialdepende del parámetro Smooth start dly. SI este parámetro es cero, Smooth start spd no se selecciona yprevalecen los valores multivelocidad. La velocidad de arranque suave se puede utilizar para la sensaciónal arrancar en algunos tipos de instalaciones.
Speed ref
Smooth start dly
1
0
Lift start mon
Time
Smooth start spd
¡NOTA! “Smooth start dly” se puede ajustar en el menú TRAVEL / Lift sequence.
7060 Multi speed 0 [rpm] RWS 0 Calc Calc PV V-F-S-BValor de velocidad 0
7061 Multi speed 1 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 1
7062 Multi speed 2 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 2
7063 Multi speed 3 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 3
7064 Multi speed 4 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 4
7065 Multi speed 5 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 5
7066 Multi speed 6 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 6
7067 Multi speed 7 [rpm] RWS 0 Calc Calc PP V-F-S-BValor de velocidad 7
7134 Max linear speed [mm/s] R Calc 0 0 FK V-F-S-B

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 139
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
TRAVEL / Ramp profileLa unidad de los parámetros está definida por IPA 1015 en el menú “STARTUP / Startup config / Mechanical data”,cambiando los ajustes IPA 1015 desde [0] Revolutions (valor por defecto) hasta [1] Millimeters, las unidades en este menúcambian de la forma siguiente:[rpm] pasa a [mm/s], [rpm/s] pasa a [mm/s2], [rpm/s2] pasa a [mm/s3].. Existen dosgrupos diferentes de perfiles de rampa (MRO ... y MR1 ...); la selección se lleva a cabo mediante el parámetro Mltramp sel src (IPA 8090) en el menú “TRAVEL / Lift sequence”. Por defecto es MRO ...
.
Speed ref
Multispeed
MR0 acc ini jerk
MR0 acceleration
MR0 acc end jerk
Speed refMultispeed
Multispeed
MR0 dec ini jerk MR0 deceleration
MR0 dec end jerkAcceleration
MR0 end decel
Acceleration
8046 MR0 acc ini jerk [rpm/s2] RWS 1000 0.349 750*100 PP V-F-S-BSacudida inicial de la aceleración, ajuste 0
8040 MR0 acceleration [rpm/s] RWS 500 1 1.5*106 PP V-F-S-BRampa de la aceleración, ajuste 0
8041 MR0 acc end jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida final de la aceleración, ajuste 0
8047 MR0 dec ini jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida inicial de la deceleración, ajuste 0
8042 MR0 deceleration [rpm/s] RWS 500 1 1.5*106 PP V-F-S-BRampa de la deceleración, ajuste 0
8043 MR0 dec end jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida final de la deceleración, ajuste 0
8044 MR0 end decel [rpm/s] RWS 1000 1 1.5*106 PP V-F-S-BPendiente de deceleración final correspondiente a la extracción del comando Start.
8056 MR1 acc ini jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida inicial de la aceleración, ajuste 1
8050 MR1 acceleration [rpm/s] RWS 500 1 1.5*106 PP V-F-S-BRampa de la aceleración, ajuste 1
8051 MR1 acc end jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida final de la aceleración, ajuste 1

140 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
8057 MR1 dec ini jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida inicial de la deceleración, ajuste 1
8052 MR1 deceleration [rpm/s] RWS 500 1 1.5*106 PP V-F-S-BRampa de la deceleración, ajuste 1
8053 MR1 dec end jerk [rpm/s2] RWS 1000 0.349 750*106 PP V-F-S-BSacudida final de la deceleración, ajuste 1
8054 MR1 end decel [rpm/s] RWS 1000 1 1.5*106 PP V-F-S-BPendiente de deceleración final correspondiente a la extracción del comando Start.
9421 SlowDown dist [mm] RW 0.00 0.00 0.00 FK V-F-S-BPermite calcular la distancia desde la velocidad de marcha a la velocidad de aproximación si se usanrespectivamente Multispeed 1 y Multispeed 0.
SlowDown dist Calculate ?Al ejecutar “Calculate ?” con la tecla Enter, se calculará la distancia desde la velocidad de funcionamiento hasta lavelocidad de aproximación.
¡NOTA! Sólo está disponible cuando el parámetro IPA 1015 Travel units sel está ajustado en milímetros.
TRAVEL / Lift sequence7100 Cont close delay [ms] RWS 200 0.00 65535 PP V-F-S-B
Retardo de cierre del contactor de salida. Consulte el capítulo 8 – Secuencias del ascenso
7101 Brake open delay [ms] RWS 0.00 0.00 65535 PP V-F-S-BConsulte el capítulo 8 – Secuencias del ascensor
7102 Smooth start dly [ms] RWS 0.00 0.00 65535 PP V-F-S-BConsulte IPA 7110 en el menú “TRAVEL / Speed profile”.
7103 Brake close dly [ms] RWS 200 0.00 65535 PP V-F-S-BConsulte el capítulo 8 – Secuencias del ascensor
7104 Cont open delay [ms] RWS 200 0.00 65535 PP V-F-S-BRetardo de apertura de los contactores de salida. Consulte el capítulo 8 – Secuencias del ascensor
7105 Seq start mode N/A RWS 0 0 2 DP V-F-S-B0 Star t fwd/rev1 Enable2 Mlt spd out !=0 (a partir del software versión 3.500).Cambia la forma de inicio de la secuencia del contactor:La selección “Start fwd/rev” permite iniciar la secuencia del contactor sin el comando Enable (Enable serequiere sólo para poner en marcha el motor). La señal Enable la puede facilitar un contacto auxiliar delos contactores de salida La selección “Enable” sólo permite iniciar las secuencias del contactorcon el comando Enable.La selección “Mlt spd out !=0” permite iniciar las secuencias del contactor con la selecciónmultivelocidad. Un valor de multivelocidad distinto de cero provocará el inicio de la secuencia.El comando Start puede estar permanentemente activado.
7106 Seq start sel N/A RWS 0 0 1 DP V-F-S-B0 Standard inp Utilización de la entrada Start fwd / rev src1 Alternative inp Utilización de la entrada Start alt src
7115 Start fwd src N/A RWS IPA 4021 List 3 PIN V-F-S-BIPA 4021 DI 1 monitor = Por defecto (consulte la Lista 3 de señales del manual de la Lista de captura)
7116 Start rev src N/A RWS IPA 4022 List 3 PIN V-F-S-BIPA 4022 DI 2 monitor = Por defecto (consulte la Lista 3 de señales del manual de la Lista de captura)
7117 Start alt src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defecto

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 141
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
7072 Mlt spd s 0 src N/A RWS IPA 4024 List 3 PIN V-F-S-BDI 4 monitor = Por defectoPermite seleccionar el origen de las señales indicando la combinación de entrada de la funciónmultivelocidad (multispeed).(Mlt spd s 0 - 1 - 2 sources; consulte la Lista 3 de señales del manual de la Lista de captura)
7073 Mlt spd s 1 src N/A RWS IPA 4025 List 3 PIN V-F-S-BDI 5 monitor = Por defectoPermite seleccionar el origen de las señales indicando la combinación de entrada de la funciónmultivelocidad (multispeed).(Mlt spd s 0 - 1 - 2 sources; consulte la Lista 3 de señales del manual de la Lista de captura)
7074 Mlt spd s 2 src N/A RWS IPA 4025 List 3 PIN V-F-S-BDI 6 monitor = Por defectoPermite seleccionar el origen de las señales indicando la combinación de entrada de la funciónmultivelocidad (multispeed). .(Mlt spd s 0 - 1 - 2 sources; consulte la Lista 3 de señales del manual de la Lista de captura)
Mtl spd sel 2 src Mtl spd sel 1 src Mtl spd sel 0 src ACTIVE RAMP REF0 0 0 Multi speed 00 0 1 Multi speed 10 1 0 Multi speed 20 1 1 Multi speed 31 0 0 Multi speed 41 0 1 Multi speed 51 1 0 Multi speed 61 1 1 Multi speed 7
7069 Mlt spd sel mon N/A R 0 0 7 DP V-F-S-BVisualización activada de la selección (Multispeed 0, Multispeed 1, etc.)
7070 Mlt spd out mon [rpm] R 0.00 0.00 0.00 PV V-F-S-BVisualiza la señal de salida del bloque multivelocidad
8090 Mlt ramp sel src N/A RWS IPA 7149 List 3 PIN V-F-S-BIPA 7149 Short floor mon = Por defectoPermite seleccionar el origen de las señales indicando la combinación de entrada de múltiples rampas(Mlt ramp s0-1 src, consulte la Lista 3 de señales del manual de la Lista de captura)
Multi Ramp sel src Ajuste activado0 MR01 MR1
8078 Mlt ramp sel mon N/A R 0 0 3 DP V-F-S-BVisualización del ajuste de la rampa seleccionada
7147 Short floor spd1 N/A RWS 8 0 8 PP V-F-S-BSelección de multivelocidad para la que debe activarse la función plano corto. Consulte el capítulo 8, figura 8.5.
7148 Short floor spd2 N/A RWS 8 0 8 PP V-F-S-BSelección de multivelocidad para la que debe activarse la función plano corto. Consulte el capítulo 8, figura 8.5.
7143 Door open src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defecto (consulte la Lista 3 de las señales del manual de la Lista de captura)Fuente para habilitar la función a través de la entrada digital.
7138 Door open speed [rpm] RWS 0.00 0.00 Calc PP V-F-S-BUmbral de velocidad de puerta abierta

142 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Door open src
Speed
Door open speed
Function enable signal
Función de control de la puerta abierta. Esta función permite el control anticipado de la puerta abierta antes de lallegada de la cabina a la planta baja. La señal de la puerta abierta se puede dar en la salida digital cuando lavelocidad cae por debajo del umbral ajustable. La función se debe habilitar mediante la entrada digital. El estadode la ejecución del comando de comprobación de la velocidad para abrir la puerta se puede verificarproporcionando la realimentación desde el mecanismo de la puerta abierta hasta la entrada digital del drive.Si el comando y la realimentación no coinciden se puede generar la alarma.
7118 Brake open src N/A RWS IPA 4001 List 3 PIN V-F-S-BA partir de la versión 3.4XX del software.Fuente para habilitar la liberación del freno a través de la entrada digital. Como estándar, la secuencia de liberacióndel freno es controlada por el drive y, por lo tanto, este parámetro debe ajustarse a ONE. En el caso de que laliberación del freno deba quedar condicionada por algún tipo de control externo (por ejemplo, PLC), ajuste esteparámetro a entrada digital controlada por PLC. La secuencia interna para la liberación del freno esperará hasta quela entrada se confirme.Durante la aplicación del freno se cerrará siempre que esta entrada no se confirme.
TRAVEL / Speed reg gainsPermite cambiar la ganancia de regulación de velocidad de acuerdo con la referencia de velocidad. Generalmente, convelocidades bajas se requiere una ganancia elevada para tener un buen comportamiento inicial. Con ganancias menores dealta velocidad es preferible suprimir las vibraciones finales causadas por las imperfecciones mecánicas. En el caso de quesean necesarios valores superiores al 100% para conseguir la respuesta deseada aumente los valores base de las gananciasen el menú “REGULATION PARAM / Spd regulator / Base values”, IPA 2075 y 2077. Cuando los valores base aumentan, losvalores del porcentaje se reducen y la ganancia resultante utilizada por el regulador preserva el valor original. En este punto losvalores del porcentaje pueden aumentar.
NOTA! “Bands %” y “Thr%” se pueden ajustar en el menú TRAVEL/Speed threshold.
Configuración por defecto (Spd 0 enable = Disable, sólo se han ajustado 21 parámetros):Gains #1 se usa para velocidades medias (aceleración / deceleración) y altasGains #2 se usa en velocidades bajas (velocidades de arranque y aproximación)
Gain
SGP tran 21 thr %
0
Speed ref
Speed ref
Spd P1 gain%
Spd P2 gain%
Spd I1 gain%
Spd I2 gain%
SGP tran 21 band %

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 143
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Posible configuración (Spd 0 enable = Disable, también se han ajustado 32 parámetros):Gains #1 se usa para velocidades altas (marcha)Gains #2 se usa para velocidades medias (aceleración / deceleración)Gains #3 se usa para velocidades bajas (arranque / paro)
Gain
SGP tran 32 band %
SGP tran 21 thr %
0
Spd P3 gain%
Speed ref
SGP tran 32 thr %
Speed ref
Spd P1 gain%
Spd P2 gain%
Spd I3 gain%
Spd I1 gain%
Spd I2 gain%
SGP tran 21 band %
Posible configuración (Spd 0 enable = Enable as spd 0, sólo se han ajustado 21 parámetros):Gains #1 se usa para velocidades altas (marcha)Gains #2 se usa para velocidades medias (aceleración / deceleración)Gains #0 se usa para velocidades bajas (arranque / paro)
Gain
SGP tran 21 thr %
0
Speed ref
Speed ref
Spd P1 gain%
Spd P2 gain%
Spd I1 gain%
Spd I2 gain%
SGP tran 21 band %
Spd 0 I gain%
Spd 0 P gain%
Spd 0 ref thr

144 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Posible configuración (Spd 0 enable = Enable as start, también se han ajustado 32 parámetros):Gains #1 se usa para velocidades altas (marcha)Gains #2 se usa para velocidades medias (aceleración / deceleración)Gains #3 se usa para la paradaGains #0 se usa para el arranque
Gain
SGP tran 32 band %
SGP tran 21 thr %
0
Spd 0 P gain%
Speed ref
SGP tran 32 thr %
Speed ref
Spd P1 gain%
Spd P2 gain%
Spd 0 I gain%
Spd I1 gain%
Spd I2 gain%
SGP tran 21 band %
Spd P3 gain%
Spd I3 gain%
Speed ref increasing
Speed ref decreasing
Speed ref increasing
Speed ref decreasing
3700 SpdP1 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 1 de velocidad proporcional a alta velocidad
3701 SpdI1 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 1 de velocidad integral a alta velocidad
3702 SpdP2 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 2 de velocidad proporcional a velocidad media
3703 SpdI2 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 2 de velocidad integral a velocidad media
3704 SpdP3 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 3 de velocidad proporcional a velocidad baja
3705 SpdI3 gain % [%] RWS 10 0 100 PP F-S-BRegulador de ganancia 3 de velocidad integral a velocidad baja
3720 Spd 0 enable N/A RWS 0 0 1 DP F-S-BA parte de la función adaptable de ganancia, es posible tener otro ajuste de ganancias cuando lareferencia de velocidad es inferior al parámetro del umbral de referencia Speed 0. La función se debehabilitar mediante este parámetro.0 Deshabilitado1 Habilitado como spd 02 Habilitado como start (a partir de la versión 3.300 del software)
3722 Spd 0 P gain % [%] RWS Calc 0 100 PP F-S-BRegulador de ganancia de velocidad 0 proporcional a velocidad 0
3723 Spd 0 I gain % [%] RWS Calc 0 100 PP F-S-BRegulador integral de velocidad 0 proporcional a velocidad 0
2530 Sfbk der enable N/A RWSZ 0 0 1 DV F-S-BHabilitar/deshabilitar la función derivada de la realimentación de la velocidad.

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 145
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.0 Disable1 Enable
T1 = Sfbk der gain • Sfbk der baseT2 = Sfbk der filter
+
-
Speed refSpeed
regulator
Speed feedbackderivative
________
1 + S • T2
1 + S • T1
Sfbk der enable
Norm Speed
Enable
Disable
2540 Sfbk der gain [%] RWS 0 -100 100 PV F-S-BGanancia derivada de la realimentación de la velocidad.
2550 Sfbk der base [ms] RWS 10000 0 10000 FK F-S-BGanancia derivada de la realimentación base.
2560 Sfbk der filter [ms] RWS 5 0 1000 PP F-S-BFiltro derivado de la realimentación de la velocidad.
2380 Prop filter [ms] RWS 1.5 0.15 1000 PP F-S-BFiltro en la parte proporcional de referencia del par. Se puede utilizar para suprimir el ruido.
TRAVEL / Speed threshold3726 Spd 0 ref thr [rpm] RWS 30 0 0 PP V-F-S-B
Umbral de referencia de velocidad 0
3727 Spd 0 ref delay [ms] RWS 500 0 30000 PP V-F-S-BRetardo de referencia de velocidad 0
Speed ref
Speed 0 ref thr
Brake cont mon
1
0
Spd 0 ref delay
Ref is zero
Ref is zero dly
¡NOTA! Las señales “Ref is zero” y “Ref is zero dly” están disponibles en las listas de captura de las salidasdigitales. La señal “Brake cont mon” está disponible en una salida de relé digital (terminales 83-85).
3724 Spd 0 speed thr [rpm] RWS 30 0 0 PP V-F-S-BUmbral de velocidad de velocidad 0.
3725 Spd 0 spd delay [ms] RWS 1000 0 30000 PP V-F-S-BRetardo de velocidad de velocidad 0.

146 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Norm Speed
Speed 0 spd thr
Spd is zero dly
0
Spd 0 spd delay
Spd is zero
0
t
¡NOTA! Las señales “Spd is zero” y “Spd is zero dly” están disponibles en las listas de captura delas salidas digitales y analógicas.
3706 SGP tran21 h thr [%] RWS 15 0 100 PP F-S-BConsulte las figuras “Possible/Default configuration” en el menú “TRAVEL / Speed reg gains”.
3707 SGP tran32 l thr [%] RWS 0 0 100 PP F-S-BConsulte las figuras “Possible/Default configuration” en el menú “TRAVEL / Speed reg gains”.
3708 SGP tran21 band [%] RWS 10 0 100 PP F-S-BConsulte las figuras “Possible/Default configuration” en el menú “TRAVEL / Speed reg gains”.
3709 SGP tran32 band [%] RWS 0 0 100 PP F-S-BConsulte las figuras “Possible/Default configuration” en el menú “TRAVEL / Speed reg gains”.
TRAVEL / Pre-torqueLa función Pre torque ayuda a asegurar un arranque suave sin la sacudida inicial. Esto se consigue ajustando elpar antes de abrir el frenado a un valor que corresponde a la carga. El valor del Pre torque aplicado al motor asícomo la dirección del par aplicado se pueden proporcionar instalando célula de carga en la cabina. La señal de lacélula de carga se adquiere a través de la entrada analógica y escalada adecuadamente, si se utiliza la funciónpre-torque. Si la célula de carga no está disponible es posible trabajar con el valor fijo del par y proporcionar sólola dirección del par. En este caso el valor fijo sólo se optimiza para una condición de carga.
Pre-torque sign src
PRE-TORQUE BLOCK
tPre-torque src
Pre-torque gain
Constant
Ramp
-1tt
+1One
Null
Speedregulator
Pre-torque out
Torque ref 2 src
+
+
Torque ref
9431 Int Pre-torque [%] RWS 0 0 100 PV F-S-BValor interno de la pre-torque del motor (fijo).
9432 Pre-torque time [sec] RWS 1.0 0.01 5 PP F-S-BDuración del pre-torque en el caso de que IPA 9439 esté seleccionado como rampa.
9438 Pre-torque gain [%] RWS 1.0 0 4.0 PP F-S-BFactor de ganancia de la function Pre-torque para escalar el valor desde el sensor de carga.El valor de la ganancia Pre-torque se calcula automáticamente después de haber introducido lainformación mecánica y de los pesos.

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 147
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.9439 Pre-torque type N/A WSZ 0 0 1 DV F-S-B
Control del tipo pre-par0 Ramp El par inicial se eliminará en la rampa1 Costant El par inicial permanece constante
9434 Pre-torque src N/A RWSZ IPA 9431 List 2 PIN F-S-BIPA 9431 Int Pre-torque = Por defectoPermite seleccionar una entrada analógica para proporcionar el valor del pre-par del motor(consulte la Lista 2 de las señales del manual de la Lista de captura)
9435 Pre-trq sign src N/A RWSZ IPA 4000 List 3 PIN F-S-BIPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por +1, o si la señal es 1, multiplíquela por –1 (consulte la Lista 3 de señales del manualdela Lista de captura).. ‘
TRAVEL / Inertia compLa función de compensación de la inercia se puede utilizar para compensar la inercia provocada por la carga delmotor durante la fase de aceleración/deceleración. Evita también el exceso de velocidad al final de la rampa.
2580 Inertia comp en N/A RWS 1 0 1 DV F-S-BHabilita la función de compensación de la inercia0 DESACTIVADO La función de compensación de inercia está desactivada1 Interno La función de compensación de inercia se está utilizando referencia de
velocidad para calcular la aceleración2 Externo (a partir del software versión 3.400). La función de compensación de inercia
está utilizando aceleración de velocidad por medio de control externo a travésde la tarjeta SBI.
2054 Int Inertia [kgm2] RWS 0 0 Calc PV F-S-BValor interno del momento de inercia. Evita el exceso de velocidad al final de la rampa. El valor de lainercia se calcula automáticamente después de haber introducido la información mecánica y de lospesos.
2590 Inertia comp flt [ms] RWS 30 0 1000 PP F-S-BFiltro en la compensación
2625 Inertia comp mon [Nm] R 0.00 0.00 0.00 DV F-S-BVisualiza la contribución del par de compensación de la inercia.
J = Int inertiaTf = Inertia comp flt
+
-
Speed ref Speedregulator
Inertia comp
S • J________
1 + S • Tf
+
Norm Speed
Inertia comp mon
+
Internal
Off
Inertia comp
J________
1 + S • Tf
External
Acceleration
¡NOTA! La señal “Inertia comp mon” está disponible en las listas de captura de las salidas analógicas.

148 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
TRAVEL / DC brakingLa inyección de corriente de CC puede ayudar a detener el motor y asegurar que la cabina llega exactamente a laplanta baja.
1836 DCbrake cmd src N/A RWS IPA 7125 List 3 PIN V-F-S-BIPA 7125 Lift DC Brake mon = Por defectoPermite seleccionar el origen de la señal para disponer de la función de frenado de CC, normalmentecuando está controlada por la secuencia del ascensor. (consulte la Lista 3 de las señales del manual dela Lista de captura)
1833 DCbrake delay [sec] RWS 0.1 0.01 30 PP V-F-S-BRetardo entre el comando de inyección y la inyección de la misma corriente
1834 DCbrake duration [sec] RWS 1 0.01 30 PP V-F-S-BDuración de la inyección de corriente
1835 DCbrake current [%] RWS 100 0 100 PP V-F-S-BCorriente de frenado como un porcentaje de la continua corriente del drive
1837 DCBrake state N/A R 0 0 1 DV V-F-S-B0 innactivo1 activoEstado de la función de frenado de CC.
¡NOTA! Secuencia disponible sólo cuando IPA 7105 está ajustado como Start fwd/rev.La señal Lift DC brake mon que controla el frenado de la corriente de CC no está disponible.
Speed ref
Speed 0 ref thr
DC brake current
0
DC brakedelay
Speed 0 ref dly + Brake close dly
Lift DC brake mon
t
1
A
B
DC brakeduration
DC brake state
Output current
DC brake cmd src
A = DC brake delay + DC brake duration > Spd 0 ref dly + Brake close dly
B = DC brake delay + DC brake duration < Spd 0 ref dly + Brake close dly

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 149
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
TRAVEL / Ramp function8031 Ramp out enable N/A WSZ 1 0 1 DP V-F-S-B
0 Deshabilitado1 HabilitadoHabilitación de la Ramp function
8021 Ramp shape N/A RWS 1 0 1 DV V-F-S-B0 Lineal1 En forma de SSelección de la rampa. Rampa lineal o en forma de S
TRAVEL / Ramp setpointLa función de este bloque sirve para generar el punto de ajuste para la rampa. Ajuste la referencia añadiendoalgebraicamente sus entradas.Todos los parámetros en este menú tienen los valores por defecto ajustados para la aplicación del ascensor.
TRAVEL / Ramp setpoint / Ramp ref src7035 Ramp ref 1 src N/A RWS IPA 7130 List 7 PIN V-F-S-B
IPA 7130 Lift out spd mon = Por defectoSelecciona el origen de la señal de Ramp ref 1(consulte la Lista 7 de las señales del manual de la Lista de captura)
7036 Ramp ref 2 src N/A RWS IPA 7031 List 8 PIN V-F-S-BIPA 7031 Int ramp ref 2 = Por defectoSelecciona el origen de la señal de Ramp ref 2(consulte la Lista 8 de las señales del manual de la Listade captura)
7029 Ramp ref 3 src N/A RWS IPA 7038 List 45 PIN V-F-S-BIPA 7038 Int ramp ref 3 = Por defectoSelecciona el origen de la señal de Ramp ref 3
7037 Ramp ref inv src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 7121 DOWN Count mon = Por defectoConecta la señal seleccionada al selector de la entrada multiplicadora: si la señal es 0, multiplíquela por+1, o si la señal es 1, multiplíquela por –1. El multiplicador permite invertir la señal de referencia de larampa (consulte la Lista 3 de señales del manual de la Lista de captura). Utilizando DOWN cont mon / Upcont mon es posible invertir la dirección del movimiento del ascensor que corresponde a los Start fwdsrc (IPA 7115), Start rev src (IPA 7116).
TRAVEL / Ramp setpoint / Ramp ref cfg7030 Int ramp ref 1 [rpm] RWS 0 Calc Calc PV V-F-S-B
Valor variable de Int ramp ref 1
7031 Int ramp ref 2 [rpm] RWS 0 Calc Calc PV V-F-S-BValor variable de Int ramp ref 2
7038 Int ramp ref 3 [rpm] RWS 0 Calc Calc PV V-F-S-BValor variable de Int ramp ref 3
TRAVEL / Ramp setpoint / Ramp ref mon7032 Ramp ref 1 mon [rpm] R 0.00 0.00 0.00 PP V-F-S-B
Visualización de la señal Ramp ref 1
7033 Ramp ref 2 mon [rpm] R 0.00 0.00 0.00 PP V-F-S-BVisualización de la señal Ramp ref 2
7039 Ramp ref 3 mon [rpm] R 0.00 0.00 0.00 PP V-F-S-BVisualización de la señal Ramp ref 3

150 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
7034 Ramp setpoint [rpm] R 0.00 0.00 0.00 PV V-F-S-BVisualización de la señal Ramp setpoint output
+
+
+
+
-1
+1
F
21Ramp setpoint
Ramp ref inv src
DOWN Cont mon
Ramp ref = Rampout mon
Ramp shape
Ramp ref 3 mon
Ramp ref 2 mon
Ramp ref 1 mon
Ramp ref 3 src
Ramp ref 2 src
Ramp ref 1 src
Int ramp ref 3
Int ramp ref 2
Lift out spd mon
1. El conmutador está cerrado cuando Ramp out enable = Enabled & Start. El conmutador está abierto cuando Ramp out enable = Enabled & Stop.2. El conmutador está cerrado cuando Ramp out enable = Enabled &(!Fast stop). El conmutador está abierto cuando Ramp out enable =
Enabled & Fast stop. Ambos conmutadores están cerrados cuando Ramp out enable = Disabled
TRAVEL / Speed setpointLa función del bloque sirve para generar el punto de ajuste para el regulador de velocidad añadiendoalgebraicamente sus entradas, consulte el punto de ajuste de la rampa.Todos los parámetros en este menú tienen los valores por defecto ajustados para la aplicación del ascensor.
TRAVEL / Speed setpoint / Speed ref src7050 Speed ref 1 src N/A RWS IPA 7040 List 9 PIN V-F-S-B
IPA 7040 Int speed ref 1 = Por defectoSelecciona el origen de la señal de Speed ref 1 en V/f, SLS. LZ speed ref (IPA 9408) en FOC, BRS(consulte la Lista 9 de las señales del manual de la Lista de captura)
7051 Speed ref 2 src N/A RWS IPA 7041 List 10 PIN V-F-S-BIPA 7041 Int speed ref 2 = Por defectoSelecciona el origen de la señal de Speed ref 2.(Consulte la Lista 10 de señales del manual de la Lista de captura).
7053 Speedref inv src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por +1, o si la señal es 1, multiplíquela por –1. El multiplicador permite invertir la señal dereferencia de velocidad (consulte la Lista 3 de señales del manual de la Lista de captura)
TRAVEL / Speed setpoint / Speed ref cfg7040 Int speed ref 1 [rpm] RWS 0 Calc Calc PV V-F-S-B
Valor variable de Int speed ref 17041 Int speed ref 2 [rpm] RWS 0 Calc Calc PV V-F-S-B
Valor variable de Int speed ref 2
TRAVEL / Speed setpoint / Speed ref mon8022 Ramp out mon [rpm] R 0.00 0.00 0.00 PV V-F-S-B
Visualización de la señal Ramp output7045 Speed ref 1 mon [rpm] R 0.00 0.00 0.00 PP V-F-S-B
Visualización de la señal Speed ref 17046 Speed ref 2 mon [rpm] R 0.00 0.00 0.00 PP V-F-S-B
Visualización de la señal Speed ref 2

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 151
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
1. Switch is closed if Ramp out enable = Disabled & Start
Both switches are closed if Ramp out enable = Enabled
Switch is opened if Ramp out enable = Disabled & Stop
2. Switch is closed if Ramp out enable = Disabled & (!Fast stop)
Switch is opened if Ramp out enable = Disabled & Fast stop
+
+
+
+
-1
+1
F
21Speed setpoint
Speed ref inv src=null
Ramp ref 2 mon
Ramp out enable
Int speed ref 1
Ramp out mon
0 rpm
F
Zero
Speed ref 1 mon
Speed ref 1 src
LZ speed ref
Int speed ref 2
0 rpm
Speed ref 2 src
Int speed ref 2
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:
• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”
Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado. Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”

152 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
REGULAREGULAREGULAREGULAREGULATION PTION PTION PTION PTION PARAMARAMARAMARAMARAMLa mayoría de los parámetros de este menú se inicializan mediante el procedimiento de la regulación automática.Se permite el acceso al menú Regulation Param mediante la contraseña del Nivel 1: 12345. Se debe ajustar en elmenú SERVICE.
REGULATION PARAM / V/f reg param3400 Voltage boost [%] RWS Calc 0.00 0.00 PV V
Aumento del par a baja velocidad. Permite incrementar el voltaje de salida a cero Hz.Inicializado mediante el procedimiento de regulación automática
3531 Slip comp [rpm] RWS Calc 0.00 Calc PV VCompensación de la caída de velocidad a causa de la carga. Inicializado mediante el procedimiento deregulación automática. Cuando Slip comp mode = encoder, este actúa como un límite en la cantidad decorrección de velocidad obtenida de la realimentación del encoder. En general el parámetro se debeincrementar hasta unas 4 veces la velocidad nominal del motor.Los valores bajos del parámetro Slip comp pueden causar inestabilidad.
3541 Slip comp filter [sec] RWS 1 Calc 10 PP VFiltro de compensación de deslizamiento.
3411 Slip comp mode N/A RWS 0 0 2 DP V0 Normal Compensación estándar de deslizamiento utilizando la intensidad de carga1 Encoder Compensación de deslizamiento utilizando la realimentación del encoder
enun control de velocidad de bucle cerrado, consulte IPA 35312 Ascensor Compensación de deslizamiento utilizando la intensidad de carga, adecuado
para ascensores (a partir del software versión 3.500).3412 Slip P gain [%] RWS 2.0 0 100 PP V
Ganancia proporcional del regulador de deslizamiento. Se debe ajustar de acuerdo con las condicionesde carga reales (inercia). En general si hay oscilaciones, se debe incrementar la ganancia proporcional.
3413 Slip I gain [%] RWS 0.5 0 100 PP VGanancia integral del regulador de deslizamiento. Se debe ajustar de acuerdo con las condiciones decarga reales (inercia). En general si hay oscilaciones, se debe reducir la ganancia integral.
3585 Antioscill gain [%] RWS 0 0 100 PP VPermite amortiguar las oscilaciones de intensidad en el motor, que se podrían desarrollar en mitad de lagama de velocidad nominal
3520 V/f ILim P gain [rpm_A] RWS Calc Calc Calc PP VGanancia proporcional del regulador de bucle de corriente pseudo en el modo V/f
3530 V/f ILim I gain [rpm_A] RWS Calc Calc Calc PP VGanancia integral del regulador de bucle de corriente pseudo en el modo V/f
REGULATION PARAM / Spd regulator
REGULATION PARAM / Spd regulator / Percent values3700 SpdP1 gain % [%] RWS Calc 0.00 00 PP F-S-B
Regulador de ganancia 1 de velocidad proporcional a alta velocidad
3701 SpdI1 gain % [%] RWS Calc 0.00 00 PP F-S-BRegulador de ganancia 1 de velocidad integral a alta velocidad
REGULATION PARAM / Spd regulator / Base values2075 SpdP base value [A/rpm] RWS Calc 0.00 0.00 FK F-S-B
Valor básico de la ganancia de velocidad proporcional

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 153
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.2077 SpdI base value [A/rpm] RWS Calc 0.00 Calc FK F-S-B
Valor básico de la ganancia de velocidad integral
REGULATION PARAM / Spd regulator / In use values2063 InUse SpdP gain% [%] R 10 0 100 PV F-S-B
Valor en uso de la ganancia de velocidad proporcional
2065 InUse SpdI gain% [%] R 10 0 100 PV F-S-BValor en uso de la ganancia de velocidad integral
REGULATION PARAM / Curr regulator
REGULATION PARAM / Curr regulator / Percent values1999 CurrP gain % [%] RWS Calc 0.00 100 PP V-F-S-B
Ganancia proporcional del bucle de corriente
2000 CurrI gain % [%] RWS Calc 0.00 100 PP V-F-S-BGanancia integral del bucle de corriente
REGULATION PARAM / Curr regulator / Base values2005 CurrP base value [V/A] RWS Calc 0.00 Calc FK V-F-S-B
Valor básico de la ganancia proporcional del bucle de corriente
2007 CurrI base value [V/A/s] RWS Calc 0.00 Calc FK V-F-S-BValor básico de la ganancia integral del bucle de corriente
REGULATION PARAM / Curr regulator / Dead time compLa función permite la compensación de la distorsión del voltaje de salida causado por la caída del voltaje IGBT ysus características de conmutación.
530 Dead time limit [V] RWS Calc 0.00 50 PP V-F-S-BValor de la compensación de voltaje
540 Dead time slope [V/A] RWS Calc 0.00 100 PP V-F-S-BInclinación de compensación
REGULATION PARAM / Flux regulator
REGULATION PARAM / Flux regulator / Percent values2013 FlxP gain % [%] RWS Calc 0 100 PP F-S
Ganancia proporcional del bucle de flujo
2015 FlxI gain % [%] RWS Calc 0 100 PP F-SGanancia integral del bucle de flujo
REGULATION PARAM / Flux regulator / Base values2021 FlxP base value [A/Wb] RWS Calc 0.00 Calc FK F-S
Valor básico de la ganancia proporcional del bucle de flujo
2023 FlxI base value [A/Wb/s]RWS Calc 0.00 Calc FK F-SValor básico de la ganancia integral del bucle de flujo
REGULATION PARAM / Vlt regulator
REGULATION PARAM / Vlt regulator / Percent values2031 VltP gain % [%] RWS Calc 0.00 100 PP F-S-B
Ganancia proporcional del bucle de voltaje
2033 VltI gain % [%] RWS Calc 0.00 100 PP F-S-BGanancia integral del bucle de voltaje

154 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
REGULATION PARAM / Vlt regulator / Base values2039 VltP base value [A/V] RWS Calc 0.00 0.00 FK F-S-B
Valor básico de la ganancia proporcional del bucle de voltaje
2041 VltI base value [A/V/s] RWS Calc 0.00 0.00 FK F-S-BValor básico de la ganancia integral del bucle de voltaje
REGULATION PARAM / Torque config
+
+
Speed reg out
Inertia comp
Filter
Prop filter+
+
Torque ref 2 mon
Torque ref 2 src
Inuse Tcurr lim+
Tcurr ref
Torque refInuse Tcurr lim-Off
T lim +/-
T lim mot/gen
T lim sym var
T lim pos var
T lim neg var
Tcurr lim sel
REGULATION PARAM / Torque config / Torque setpoint / T setpoint src2441 Torque ref 2 src N/A RWS IPA 9433 List15 PIN F-S-B
IPA 9433 Pre-torque out = Por defectoPermite seleccionar el origen de la señal para la referencia del par(consulte la Lista 15 de las señales del manual de la Lista de captura).
REGULATION PARAM / Torque config / Torque setpoint / T setpoint cfg2440 Int torque ref 2 [Nm] RWS 0.00 Calc Calc PV F-S-B
Permite ajustar una referencia alternativa para conectar a Torque ref 2 src
REGULATION PARAM / Torque config / Torque setpoint / T setpoint mon2442 Torque ref 2 mon [Nm] R 0.00 0.00 0.00 PP F-S-B
Visualizzazione della variabile Torque ref 2
2450 Torque ref [Nm] R 0.00 0.00 0.00 PV F-S-BVisualización variable Overall Torque ref
REGULATION PARAM / Torque config / Torque curr lim / Trq curr lim src1195 Trq curr lim src N/A RWS IPA 4000 List15 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite seleccionar el origen de la señal para el límite de corriente del par(consulte la Lista 15 de las señales del manual de la Lista de captura) (a partir de la versión 3.300 del software).
REGULATION PARAM / Torque config / Torque curr lim / Trq curr lim cfg1190 Tcurr lim sel N/A RWS 0 0 4 DV V-F-S-B
Selección del tipo de límite de corriente del par0 Off Ninguno
Los límites dependen de los valores del drive1 T lim +/- Límite positivo o negativo
Los límites dependen de IPA 1210, IPA12202 T lim mot/gen Límite del motor o del generador
Los límites dependen de IPA 1210, IPA12203 T lim sym var Los límites están controlados por IPA 1195 (*).4 T lim pos var Los límites están controlados por IPA 1195 (*).5 T lim neg var Los límites están controlados por IPA 1195
(*) : a partir de la versión 3.300 del software

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 155
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
1210 Tcurr lim + [A] RWS Calc 0.00 Calc PV V-F-S-BLímite de corriente positiva o límite (potencia positiva) del motor.
1220 Tcurr lim - [A] RWS Calc 0.00 Calc PV V-F-S-BLímite de corriente negativa o límite (potencia negativa) del generador.
REGULATION PARAM / Torque config / Torque curr lim / Trq curr lim mon1250 Inuse Tcurr lim+ [A] R 0.00 0.00 0.00 PV V-F-S-B
Control del límite de corriente positiva en uso
1260 Inuse Tcurr lim- [A] R 0.00 0.00 0.00 PV V-F-S-BControl para el límite de corriente negativa en uso
2445 Tcurr lim state N/A R 0 0 1 DV V-F-S-BEstado del límite de corriente0 Inalcanzado1 Alcanzado
REGULATION PARAM / Flux config
REGULATION PARAM / Magnetiz configAutophase rot / Start ?
Comando Autophasing para poner en fase motores sin escobillas. Después de pulsar Start, aplique loscomandos Enable y Start al drive. El motor debe estar libre de carga, el freno no aplicado. El motor alinearáprimero y luego girará ligeramente a muy baja velocidad (a partir del software versión 3.500).
Autophase still / Start ?Comando Autophasing para poner en fase motores sin escobillas. Después de pulsar Start, aplique loscomandos Enable y Start al drive. El Drive realizará el procedimiento de puesta en fase sin rotación. Elfreno puede estar aplicado (a partir del software versión 3.500).
1810 Magn ramp time [sec] RWS D.Size 0.01 5 PP F-SAjuste del tiempo de rampa de la corriente magnetizante
1815 Lock flux pos N/A RWSZ 0 0 1 DP F-S-B0 Off Sin bloquear la posición de flujo1 At magnetization La posición de flujo está bloqueada durante la magnetización2 At Spd = 0 La posición de flujo se ha bloqueado cuando se ha emitido el comando
de parada y la señal “Speed is zero delayed” pasa a TRUE3 At Magn & Spd = 0 La posición de flujo se ha bloqueado durante la magnetización o
cuando se ha emitido el comando de parada y la señal “Speed is zerodelayed” pasa a TRUE
4 At magn & Ref=0 La posición de flujo se ha bloqueado durante la magnetización o cuandoambas señales “Speed reference is zero delayed” y “Speed is zero delayed”pasan a TRUE
La función es útil para la rotación indeseada del eje del motor. Permite bloquear la posición Flux.
REGULATION PARAM / Flux config / Flux max limit / Flux max lim srcRelacionado con el control del bucle de voltaje. En una condición donde el flujo es = 100%, predomina elregulador de voltaje que controla el motor. Significa que sólo es posible seguir limitando el requisito del bucle devoltaje. En el caso de que el drive esté activado en la zona de par constante, se puede ajustar un exceso de flujode hasta el 115% del flujo nominal. Es posible, obviamente, sólo cuando la combinación motor/drive está en unaposición para proporcionar una intensidad magnetizante suficiente.1121 Flux level src N/A RWS IPA 1120 List 24 PIN F-S-B
IPA 1120 Int flx maxlim = Por defectoPermite seleccionar el origen de la señal para controlar la función(consulte la Lista 24 de las señales del manual de la Lista de captura)

156 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
REGULATION PARAM / Flux config / Flux max limit / Flux max lim cfg1120 Int flx maxlim [%] RWS 0.00 0.00 0.00 PV F-S-B
Permite ajustar una señal alternativa para conectar a Flux level src
REGULATION PARAM / Flux config / Flux max limit / Flux max lim mon1150 Inuse flx maxlim [%] R 0.00 0.00 0.00 PV F-S-B
Control del valor del límite de flujo en uso
REGULATION PARAM / Flux config / Output vlt refLa función permite la regulación del flujo en la zona de potencia constante donde debe haber un margen de voltajepara la regulación. Este valor normalmente equivale al 2% del voltaje máximo de salida. Un valor mayor permite unarespuesta más rápida del regulador de voltaje pero con una cantidad inferior de voltaje disponible en la salida. Unvalor inferior permite un voltaje de salida superior con una reducción del rendimiento dinámico
REGULATION PARAM / Flux config / Output vlt ref / Out vlt ref src1141 Outvlt lim src N/A RWS IPA 1140 List 42 PIN F-S-B
IPA 1140 Int Outvlt lim = Por defectoPermite seleccionar el origen de la señal para controlar la función(consulte la Lista 42 de las señales del manual de la Lista de captura)
REGULATION PARAM / Flux config / Output vlt ref / Out vlt ref cfg1140 Int Outvlt lim [V] RWS Calc Calc Calc PV F-S-B
Límite interno del voltaje de salida inicializado desde el voltaje nominal del motor.Este parámetro determina el inicio del debilitamiento del flujo. Conectado a Outvlt lim srcI
1130 Dyn vlt margin [%] RWS 2 1 10 PV F-S-BMargen de voltaje para la regulación del flujo
REGULATION PARAM / Flux config / Output vlt ref / Out vlt ref mon1170 Available Outvlt [V] R 0.00 0.00 0.00 PV F-S-B
Control para el máximo voltaje de salida disponible.Se calcula directamente empezando desde el voltaje de enlace de CC
1180 Inuse Outvlt ref [V] R 0.00 0.00 0.00 PV F-S-BLímite en uso en el voltaje de salida
2044 Magn curr lim [A] RWS 0.00 0.00 Calc PP BLímite para la referencia de corriente magnetizante.Ajústelo a un valor distinto a cero para activar el funcionamiento por encima de la velocidad nominal paramotores brushless de “debilitamiento de campo”.
REGULATION PARAM / Sls SpdFbk gainsEn el modo de regulación sin sensor la velocidad del motor se calcula a través de un algoritmo de observaciónbasado en un perfil de ganancias de velocidad. El siguiente procedimiento permite al usuario mejorar el perfil deganancias del circuito de observaciones a una velocidad de Motoring/Regen alta, media y baja.
REGULATION PARAM / Sls SpdFbk gains / Motoring gains1090 SLS mot HPgain [%] RWS 5 0 100 PP S
Ganancia alta proporcional del motor
1091 SLS mot HIgain [%] RWS 5 0 100 PP SGanancia alta integral del motor
1092 SLS mot MPgain [%] RWS 5 0 100 PP SGanancia media proporcional del motor

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 157
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
1093 SLS mot MIgain [%] RWS 5 0 100 PP SGanancia media integral del motor
1094 SLS mot LPgain [%] RWS 1 0 100 PP SGanancia baja proporcional del motor
1095 SLS mot LIgain [%] RWS 0 0 100 PP SGanancia baja integral del motor
REGULATION PARAM / Sls SpdFbk gains / Regen gains1101 SLS regen HPgain [%] RWS 5 0 100 PP S
Ganancia alta proporcional de Regen
1102 SLS regen HIgain [%] RWS 5 0 100 PP SGanancia alta integral de Regen
1103 SLS regen MPgain [%] RWS 5 0 100 PP SGanancia media proporcional de Regen
1104 SLS regen MIgain [%] RWS 5 0 100 PP SGanancia media integral de Regen
1105 SLS regen LPgain [%] RWS 1 0 100 PP SGanancia baja proporcional de Regen
1106 SLS regen LIgain [%] RWS 0 0 100 PP SGanancia baja integral de Regen
REGULATION PARAM / Sls SpdFbk gains / Gain transitions1096 SLS H/M tran level [rpm] RWS Calc 0.00 Calc PP S
Nivel de transición desde el perfil alto al medio
1097 SLS M/L tran level [rpm] RWS Calc 0.00 Calc PP SNivel de transición desde el perfil medio al bajo
1098 SLS H/M tran bnd [rpm] RWS Calc 0.00 Calc PP SBanda de transición desde el perfil alto al medio
1099 SLS M/L tran bnd [rpm] RWS Calc 0.00 Calc PP SBanda de transición desde el perfil medio al bajo
1107 SLS 0 tran bnd [rpm] RWS Calc 0.00 Calc PP SBanda de transición Speed 0 (Motoring/Regen/Motoring)
1111 Observer filter [ms] RWS 100 Calc Calc PP SConstante de tiempo del filtro de primer orden en ambos perfiles de ganancia
REGULATION PARAM / Sls SpdFbk gains / Gain monitor1085 Inuse S P gain [%] R 0.00 0.00 0.00 PV S
Ganancias proporcionales en uso del observador de velocidad.
1086 Inuse S I gain [%] R 0.00 0.00 0.00 PV SGanancias integrales en uso del observador de velocidad.
1112 Observer ref mon [%] R 0.00 0.00 0.00 PP SMonitor de referencia de ganancia de adaptación del observador.
REGULATION PARAM / Test generatorLa regulación de los reguladores se lleva a cabo mediante un generador de señal de prueba interna para evaluar larespuesta del regulador. Esta operación requiere el uso de un osciloscopio digital. El “Test generator” generaseñales de forma de onda rectangular con una frecuencia y una amplitud programable. Utilizando la función delTest generator se puede llevar a cabo la regulación manual del Current regulador (regulador de corriente),

158 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Flux regulator (regulador de flujo) Voltage regulador (regulador de voltaje) y Speed regulador (regulador develocidad).
REGULATION PARAM / Test generator / Test gen mode2756 Test gen mode N/A RWS 0 0 6 DK V-F-S-B
0 Off1 Ramp ref 1 Referencia de rampa 12 Speed ref 1 Referencia de velocidad 13 Torque ref 2 Referencia de par 24 Magn curr ref Referencia de corriente magnetizante5 Flux ref Referencia de flujo6 Outvlt limReferencia de voltajeEste parámetro define donde está conectada la señal de test en el esquema de control.
REGULATION PARAM / Test generator / Test gen cfg2745 Gen Hi ref [cnt] RWS 0 32767 -32767 PV V-F-S-B
Valor referente al valor de la señal de amplitud mayor
2750 Gen Low ref [cnt] RWS 0 32767 -32767 PV V-F-S-BValor referente al valor de la señal de amplitud menor
2755 Gen Period [sec] RWS 10 0 10000 PV V-F-S-BPeriodo de la onda cuadrada
REGULATION PARAM / Test generator / Test gen mon2760 Gen output [cnt] R 0.00 0.00 0.00 PV V-F-S-B
Control de la señal de salida del generador.
t
Gen Hi ref
Gen output
Gen Low ref
Gen period
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado. Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP. Cuandoen la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “Save Config?”

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 159
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIGI/O CONFIGI/O CONFIGI/O CONFIGI/O CONFIGSe permite el acceso al menú I/O CONFIG mediante la contraseña del Nivel 1: 12345. Se debe ajustar todo en elmenú SERVICE.
I/O CONFIG / CommandsConfiguración de los comandos Enable, Start. Todos los parámetros en este menú tienen los valores por defectoajustados para la aplicación del ascensor.
I/O CONFIG / Commands / Commands src153 Term StrStp src N/A RWS IPA 4001 List 16 PIN V-F-S-B
IPA 4001 ONE = Por defectoPermite seleccionar la señal para generar el comando Start (1) y el comando Stop (0) de la placa delterminal (consulte la Lista 16 de las señales del manual de la Lista de captura)
9210 Term Start src N/A RWS IPA 4000 List 16 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite seleccionar la señal para generar el comando Start de la placa del terminal(consulte la Lista 16 de las señales del manual de la Lista de captura)
9211 Term Stop src N/A RWS IPA 4000 List 16 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite seleccionar la señal para generar el comando Stop de la placa del terminal(consulte la Lista 16 de las señales del manual de la Lista de captura)
156 Dig Enable src N/A RWS IPA 7128 List 17 PIN V-F-S-BIPA 7128 Lift Enable src = Por defectoPermite seleccionar la señal para generar un comando Enable digital(consulte la Lista 17 de las señales del manual de la Lista de captura)
157 Dig StrStp src N/A RWS IPA 7129 List 17 PIN V-F-S-BIPA 7129 Lift Start mon = Por defectoPermite seleccionar la señal para generar un comando Start (1) digital y un comando Stop (0) digital(consulte la Lista 17 de las señales del manual de la Lista de captura)
154 FastStop src N/A RWS IPA 4000 List 18 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite seleccionar la señal para generar el comando FastStop(consulte la Lista 18 de las señales del manual de la Lista de captura)
I/O CONFIG / Commands / Commands cfgEl parámetro “Commands select” determina la lógica para la señal sensible Star t/Stop Edge o para la señalsensible del Nivel o para el control de los comandos del teclado de las teclas I O
4002 Commands select N/A RWS 2 0 4 DV V-F-S-B0 Terminals Level El drive se controla mediante la placa del terminal utilizando unas señales
sensibles del Nivel1 Terminals Edge El drive se controla mediante la placa del terminal utilizando unas señales
sensibles del Borde2 Digital Level El drive se controla desde una tarjeta de comunicación o aplicación
utilizando unas señales sensibles del Nivel3 Digital Edge El drive se controla desde una tarjeta de comunicación o aplicación
utilizando unas señales sensibles del Borde4 I O keys El drive se controla desde el teclado utilizando las teclas I O; se requiere
hasta el terminal 12 y del terminal 13 hasta el 24VdcNo se permite el ajuste de este parámetro mientras la habilitación del terminal esté activada.

160 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.4004 En/Disable mode N/A RWS 0 0 3 DP V-F-S-B
0 Off1 Stop/FS & Spd=02 Stop & Spd=03 FS & Spd=0Controla el tiempo de acción de la condición de parada.No se permite el ajuste de este parámetro mientras la habilitación del terminal esté activada.
4006 Spd 0 dis dly [ms] RWS 1000 16 10000 PP V-F-S-BRetardo entre la velocidad cero y el procedimiento de deshabilitación
I/O CONFIG / Commands / Commands mon150 Enable cmd mon N/A R 0 0 1 DV V-F-S-B
Visualiza el estado del comando Enable
151 Start cmd mon N/A R 0 0 1 DV V-F-S-BVisualiza el estado del comando Start
152 FastStop cmd mon N/A R 0 0 1 DV V-F-S-BVisualiza el estado del comando FastStop
I/O CONFIG / Analog inputsEl drive tiene 3 entradas analógicas estándares y 2 entradas analógicas ampliadas. Cada bloque AI tiene lasiguiente estructura. Las entradas analógicas también se pueden utilizar como entradas digitales no aisladasutilizando el An inp X<thr como salida y ajustando adecuadamente el parámetro Anp inp X thr.
+1
-1
(*)
HARDWARE JUMPER
: Off --> AI1 +/- 10V
S8
: On --> AI1 0-20mA ;4 - 20mA
SET BYAn inp 1
AUTOTUNE
SET BYAn inp 1
AUTOTUNE
+
+
INPUT
F
An inp 1 output
16384-16384
An inp 1 hi lim
An inp 1 lo lim (Input[V] * 16384 /10[V]) * Gain * Scale
(*)CALIBRATION
OFANALOG INPUT
An inp 1 output
An inp 1 type
An inp 1 filter
An inp 1 offset An inp 1 thr
An inp 1 scale
An inp 1 gain
An inp 1 < thr
An inp 1 hi lim
An inp 1 lo lim
NULL
AI 1 sgn src
AI 1 alt sel srcNULL
AI 1 alt value
Analog inputs / Std analog inps / Analog input 1 / An inp 1 src5011 AI 1 sgn src N/A RWS IPA 4000 List 3 PIN V-F-S-B
IPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por +1, o si la señal es 1, multiplíquela por–1. El multiplicador permite invertir la señal dela entrada analógica 1 (consulte la Lista 3 de las señales del manual de la Lista de captura)
5012 AI 1 alt sel src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la referencia alternativa para el bloque An. Inp. 1(consulte la Lista 3 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 161
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Analog inputs / Std analog inps / Analog input 1 / An inp 1 cfg5000 An inp 1 type N/A RWS 0 0 2 DP V-F-S-B
0 -10V...+10V La entrada conecta una señal con un voltaje máximo de +/-10V. (El cambioen la dirección de la rotación del motor se obtiene de acuerdo con lapolaridad de la señal). Voltaje de entrada > 10V o >-10V provocasaturación del valor de recuento.
1 0..20mA,0..10V En la entrada se puede conectar un voltaje máximo de +10V o una señal decorriente de 0…20mA. La señal siempre debe tener una señal de posición, através de la cual, si se utiliza como referencia, se puede cambiar la direcciónde la rotación del motor mediante “AI 1 sgn src”
2 4..20mA En la entrada es posible conectar una señal de corriente de 4… 20mA. Laseñal siempre debe tener una señal de posición, a través de la cual, si se utilizacomo referencia, se puede cambiar la dirección de la rotación del motormediante “AI 1 sgn src”. A través de la salida An inp X <thr se puedecomprobar si la señal de corriente es inferior a la del umbral ajustado. Si lacorriente es <= 4mA , la salida proporciona una señal (señal de error). Ésta,por ejemplo, se puede combinar con una salida digital
¡NOTA! La selección “An inp 1 type” requiere una configuración correcta de los puentes de la tarjetade regulación RV33:
-10V...+10V & 0..10V S8=OFF – S9=OFF – S10=OFF0..20mA & 4..20mA S8=ON – S9= ON – S10= ON
5002 AI 1 alt value [cnt] RWS 0 32767 -32767 PV V-F-S-BValor de referencia alternativa referente a la entrada analógica 1
5003 An inp 1 thr [cnt] RWS 3277 -16384 16383 PP V-F-S-BReferente al valor del umbral de la entrada analógica 1
5004 An inp 1 scale N/A RWS 1 -16 16 PP V-F-S-BFactor de la escala de la entrada analógica 1
5006 An inp 1 filter [sec] RWS 0.0064 0.00 4.096 PP V-F-S-BConstante temporal del filtro de la entrada analógica 1
5007 An inp 1 low lim [cnt] RWS -16384 -32768 32767 PP V-F-S-BReferente al límite inferior de la salida del bloque de la entrada analógica 1 (consulte la siguiente figura)
5008 An inp 1 hi lim [cnt] RWS 16383 -32768 32767 PP V-F-S-BReferente al límite superior de la salida del bloque de la entrada analógica 1 (consulte la siguiente figura)
AI 1 offs tune / Start?Comando de regulación automática para el desplazamiento de la entrada analógica 1. Matizaciónautomática de la entrada. Para ejecutar la regulación automática, ajuste la señal de entrada a su valormínimo y ejecute el comando “Start ?”
AI 1 gain tune / Start?Comando de regulación automática para la ganancia de la entrada analógica 1. Las condiciones quecontienen un desplazamiento se pueden compensar. Para ejecutar la regulación automática, ajuste laseñal de entrada a su valor máximo y ejecute el comando “Start ?”
Analog inputs / Std analog inps / Analog input 1 / An inp 1 mon5009 An inp 1 output [cnt] R 0.00 -32768 32767 PV V-F-S-B
Visualización del recuento de la salida de la entrada analógica 1
5010 An inp 1 < thr N/A R 0 0 1 DV V-F-S-BVisualización del estado del compensador del umbral de la entrada analógica 1 (1 = la condición es correcta)
5001 An inp 1 offset [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento del desplazamiento de la entrada analógica 1
5005 An inp 1 gain N/A RWS 1 -16 16 PP V-F-S-BVisualización del valor del recuento de la ganancia de la entrada analógica 1

162 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Analog inputs / Std analog inps / Analog input 2 / An inp 2 src5031 AI 2 sgn src N/A RWS IPA 4000 List 3 PIN V-F-S-B
IPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por 2, o si la señal es 1, multiplíquela por–1. El multiplicador permite invertir la señal de laentrada analógica 1 (consulte la Lista 3 de las señales del manual de la Lista de captura)
5032 AI 2 alt sel src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la referencia alternativa para el bloque An. Inp. 2(consulte la Lista 3 de las señales del manual de la Lista de captura)
Analog inputs / Std analog inps / Analog input 2 / An inp 2 cfg5020 An inp 2 type N/A RWS 0 0 2 DP V-F-S-B
0 -10V ... +10V1 0..20mA,0..10V3 4..20mAPara la descripción de “An inp 2 type” consulte la anterior descripción de “An inp 1 type”
5022 AI 2 alt value [cnt] RWS 0 32767 -32767 PV V-F-S-BValor de referencia alternativa referente a la entrada analógica 2
5023 An inp 2 thr [cnt] RWS 3277 -16384 16383 PP V-F-S-BReferente al valor del umbral de la entrada analógica 2
5024 An inp 2 scale N/A RWS 1 -16 16 PP V-F-S-BFactor de la escala de la entrada analógica 2
5026 An inp 2 filter [sec] RWS 0.0064 0.00 4.096 PP V-F-S-BConstante temporal del filtro de la entrada analógica 2
5027 An inp 2 lo lim [cnt] RWS -16384 -32768 32767 PP V-F-S-BReferente al límite inferior de la salida del bloque de la entrada analógica 2 (consulte la anteriorfigura de la entrada analógica1)
5028 An inp 2 hi lim [cnt] RWS 16383 -32768 32767 PP V-F-S-BReferente al límite superior de la salida del bloque de la entrada analógica 2 (consulte la anterior figura dela entrada analógica1)
AI 2 offs tune / Start?Consulte la anterior descripción de “AI 1 offs tune”
AI 2 gain tune / Start?Consulte la anterior descripción de “AI 1 gain tune”
Analog inputs / Std analog inps / Analog input 2 / An inp 2 mon5029 An inp 2 output [cnt] R 0.00 -32768 32767 PV V-F-S-B
Visualización del recuento de la salida de la entrada analógica 2
5030 An inp 2 < thr N/A R 0 0 1 DV V-F-S-BVisualización del estado del compensador del umbral de la entrada analógica 2 (1 = la condición es correcta)
5021 An inp 2 offset [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento del desplazamiento de la entrada analógica 2
5025 An inp 2 gain N/A RWS 1 -16 16 PP V-F-S-BVisualización del valor del recuento de la ganancia de la entrada analógica 2
Analog inputs / Std analog inps / Analog input 3 / An inp 3 src5051 AI 3 sgn src N/A RWS IPA 4000 List 3 PIN V-F-S-B
IPA 4000 NULL = Por defecto

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 163
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Conecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por 3, o si la señal es 1, multiplíquela por–1. El multiplicador permite invertir la señal de laentrada analógica 1 (consulte la Lista 3 de las señales del manual de la Lista de captura)
5052 AI 3 alt sel src N/A RWS IPA 4000 List 3 PIN V-F-S-BIPA 4000 NULL = Por defectoConecta la señal seleccionada hasta el selector de la referencia alternativa para el bloque An. Inp. 3(consulte la Lista 3 de las señales del manual de la Lista de captura)
Analog inputs / Std analog inps / Analog input 3 / An inp 3 cfg5040 An inp 3 type N/A RWS 0 0 2 DP V-F-S-B
0 -10V ... +10V1 0..20mA,0..10V2 4..20mAPara la descripción de “An inp 3 type” consulte la anterior descripción de “An inp 1 type”
5042 AI 3 alt value [cnt] RWS 0 32767 -32767 PV V-F-S-BValor de referencia alternativa referente a la entrada analógica 3
5043 An inp 3 thr [cnt] RWS 3277 -16384 16383 PP V-F-S-BReferente al valor del umbral de la entrada analógica 3
5044 An inp 3 scale N/A RWS 1 -16 16 PP V-F-S-BFactor de la escala de la entrada analógica 3
5046 An inp 3 filter [sec] RWS 0.0064 0.00 4.096 PP V-F-S-BConstante temporal del filtro de la entrada analógica 3
5047 An inp 3 lo lim [cnt] RWS -16384 -32768 32767 PP V-F-S-BReferente al límite inferior de la salida del bloque de la entrada analógica 3 (consulte la anterior figura dela entrada analógica1)
5048 An inp 3 hi lim [cnt] RWS 16383 -32768 32767 PP V-F-S-BLimite superiore dell’uscita del blocco dell’ingresso analogico 3 in count (vedere la fig.dell’ingresso an.1)
AI 3 offs tuneConsulte la anterior descripción de “AI 1 offs tune”
AI 3 gain tuneConsulte la anterior descripción de “AI 1 gain tune”
Analog inputs / Std analog inps / Analog input 3 / An inp 3 mon5049 An inp 3 output [cnt] R 0.00 -32768 32767 PV V-F-S-B
Visualización del recuento de la salida de la entrada analógica 3
5050 An inp 3 < thr N/A R 0 0 1 DV V-F-S-BVisualización del estado del compensador del umbral de la entrada analógica 3 (1 = la condición es correcta)
5041 An inp 3 offset [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento del desplazamiento de la entrada analógica 3
5045 An inp 3 gain - RWS 1 -16 16 PP V-F-S-BVisualización del valor del recuento de la ganancia de la entrada analógica 3
Analog inputs / Exp analog inps / Analog input 1X / An inp 1X src5069 AI 1X sgn src N/A RWS IPA 4000 List 3 PIN V-F-S-B
IPA 4000 NULL = Por defectoCConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por +1, o si la señal es 1, multiplíquela por–1. El multiplicador permite invertir la señal dela entrada analógica 1X. (consulte la Lista 3 de las señales del manual de la Lista de captura)
Analog inputs / Exp analog inps / Analog input 1X / An inp 1X cfg5060 An inp 1X type N/A RWS 0 0 2 DP V-F-S-B

164 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.0 -10V ... +10V1 0..20mA,0..10V3 4..20mAPara la descripción de “An inp 1X type” consulte la anterior descripción de “An inp 1 type”
5062 An inp 1X thr [cnt] RWS 3277 -16384 16383 PP V-F-S-BReferente al valor del umbral de la entrada analógica 1X
5063 An inp 1X scale N/A RWS 1 -16 16 PP V-F-S-BFactor de la escala de la entrada analógica 1X
5065 An inp 1X lo lim [cnt] RWS -16384 -32768 32767 PP V-F-S-BReferente al límite inferior de la salida del bloque de la entrada analógica 1X (consulte la anterior figura dela entrada analógica1)
5066 An inp 1X hi lim [cnt] RWS 16383 -32768 32767 PP V-F-S-BReferente al límite superior de la salida del bloque de la entrada analógica 1X (consulte la anteriorfigura de la entrada analógica1)
AI 1X offs tuneConsulte la anterior descripción de “AI 1 offs tune”
AI 1X gain tuneConsulte la anterior descripción de “AI 1 offs gain”
Analog inputs / Exp analog inps / Analog input 1X / An inp 1X mon5067 An inp 1X output [cnt] R 0.00 -32768 32767 PV V-F-S-B
Visualización del recuento de la salida de la entrada analógica 1X
5068 An inp 1X < thr N/A R 0 0 1 DV V-F-S-BVisualización del estado del compensador del umbral de la entrada analógica 1X (1 = la condición es correcta)
5061 An inp 1X offset [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento del desplazamiento de la entrada analógica 1X
5064 An inp 1X gain [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento de la ganancia de la entrada analógica 1X
Analog inputs / Exp analog inps / Analog input 2X / An inp 2X src5089 AI 2X sgn src N/A RWS IPA 4000List 3 PIN V-F-S-B
IPA 4000 NULL = DefaultConecta la señal seleccionada hasta el selector de la entrada multiplicadora: si la señal es 0,multiplíquela por +1, o si la señal es 1, multiplíquela por–1. El multiplicador permite invertir la señal dela entrada analógica 2X. (consulte la Lista 3 de las señales del manual de la Lista de captura)
Analog inputs / Exp analog inps / Analog input 2X / An inp 2X cfg5080 An inp 2X type N/A RWS 0 0 2 DP V-F-S-B
0 -10V ... +10V1 0..20mA,0..10V2 4..20mAPara la descripción de “An inp 2X type” consulte la anterior descripción de “An inp 1 type”
5082 An inp 2X thr [cnt] RWS 3277 -16384 16383 PP V-F-S-BReferente al valor del umbral de la entrada analógica 2X
5083 An inp 2X scale N/A RWS 1 -16 16 PP V-F-S-BFactor de la escala de la entrada analógica 2X
5085 An inp 2X lo lim [cnt] RWS -16384 -32768 32767 PP V-F-S-BReferente al límite inferior de la salida del bloque de la entrada analógica 2X(consulte la anterior figura de la entrada analógica1)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 165
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
5086 An inp 2X hi lim [cnt] RWS 16383 -32768 32767 PP V-F-S-BReferente al límite superior de la salida del bloque de la entrada analógica 2X (consulte la anteriorfigura de la entrada analógica1)
AI 2X offs tuneConsulte la anterior descripción de “AI 1 offs tune”
AI 2X gain tuneConsulte la anterior descripción de “AI 1 offs gain”
Analog inputs / Exp analog inps / Analog input 2X / An inp 2X mon5087 An inp 2X output [cnt] R 0.00 -32768 32767 PV V-F-S-B
Visualización del recuento de la salida de la entrada analógica 2X
5088 An inp 2X < thr N/A R 0.00 0.00 0.00 DV V-F-S-BVisualización del estado del compensador del umbral de la entrada analógica 2X (1 = la condición es correcta)
5081 An inp 2X offset [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento del desplazamiento de la entrada analógica 2X
5084 An inp 2X gain [cnt] RWS 0 -16384 16383 PP V-F-S-BVisualización del valor del recuento de la ganancia de la entrada analógica 2X
Analog inputs / Exp analog inps / Exp ana inp en3900 Exp ana inp en N/A RWS 0 0 1 DV V-F-S-B
0 Deshabilitado2 HabilitadoHabilita las entradas analógicas ampliadas
Analog inputs / DestinationsEste menú de sólo lectura permite al usuario ver donde se conectan las entradas analógicas. Si hay más de unafuente conectada a una entrada analógica, sólo se muestra una. Si no hay fuentes conectadas, se visualiza elmensaje “Not used”.
4500 An inp 1 dstVisualiza el destino de la entrada analógica 1
4501 An inp 2 dstVisualiza el destino de la entrada analógica 2
4502 An inp 3 dstVisualiza el destino de la entrada analógica 3
4503 An inp 1X dstVisualiza el destino de la entrada analógica 1X
4504 An inp 2X dstVisualiza el destino de la entrada analógica 2X
I/O CONFIG / Analog outputs
CALIBRATION TO +/-10 VAn out 1 mon (in counts) * An out 1 scale = An out 1 hi lim (in counts) = 10 V
An out 1 mon (in counts) * An out 1 scale = An out 1 lo lim (in counts) = -10 V

166 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Analog Output 1
Software version 3.200
An out 1 scale1
An out 1 hi lim16383 cnt
An out 1 lo lim-16384 cnt
An out 1 srcNULL
An out 1 mon
Software version 3.300
An out 1 sgn src
An out 1 src
NULL
An out 1 mon
1
-1
NULL
ONE
El drive tiene 2 salidas analógicas estándares (salidas de voltaje) y 4 salidas analógicas ampliadas (1x y 2x =salidas de voltaje, 3x y 4x=salidas de corriente). Cada bloque de salida analógica tiene la siguiente estructura.
Analog outputs / Std analog outs / Analog output 1 / An out 1 src3570 An out 1 src N/A RWS IPA 4000 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 1(consulte la Lista 2 de señales delmanual de la Lista de captura)
3575 An out 1 sgn src N/A RWS IPA 4000 List 2 V-F-S-BPermite seleccionar la señal de la señal conectada en la salida analógica. (a partir de la versión 3.300 del software)
Analog outputs / Std analog outs / Analog output 1 / An out 1 cfg6012 An out 1 scale N/A RWS 1 -10 10 PP V-F-S-B
Factor de escala o multiplicativo de la salida analógica 1
6010 An out 1 hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 1 destinado a obtener +10V. El valor debe ser superior a cero
6011 An out 1 lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 1 destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Std analog outs / Analog output 1 / An out 1 mon6013 An out 1 mon [cnt] R 0 -32768 32767 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 1
Analog outputs / Std analog outs / Analog output 2 / An out 2 src3580 An out 2 src N/A RWS IPA 4000 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 2(consulte la Lista 2 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 167
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
3576 An out 2 sgn src N/A RWS IPA 4000 List 2 V-F-S-BPermite seleccionar la señal de la señal conectada en la salida analógica. (a partir de la versión 3.300 del software)
Analog outputs / Std analog outs / Analog output 2 / An out 2 cfg6017 An out 2 scale N/A RWS 1 -10 10 PP V-F-S-B
Factor de escala o multiplicativo de la salida analógica 2
6015 An out 2 hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 2 destinado a obtener +10V. El valor debe ser superior a cero
6016 An out 2 lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 2 destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Std analog outs / Analog output 2 / An out 2 mon6018 An out 2 mon [cnt] R 0.00 -32768 32676 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 2
Analog outputs / Exp analog outs / Analog output 1X / An out 1X src4090 An out 1X src N/A RWS IPA 4000 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 1X(consulte la Lista 2 de las señales del manual de la Lista de captura)
Analog outputs / Exp analog outs / Analog output 1X / An out 1X cfg6022 An out 1X scale N/A RWS 1 -10 10 PP V-F-S-B
Factor de escala o multiplicativo de la salida analógica 1X
6020 An out 1X hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 1X destinado a obtener +10V. El valor debe ser superior a cero
6021 An out 1X lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 1X destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Exp analog outs / Analog output 1X / An out 1X mon6023 An out 1X mon [cnt] R 0.00 -32768 32676 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 1X
Analog outputs / Exp analog outs / Analog output 2X / An out 2X src4091 An out 2X src N/A RWS IPA 4000 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 2X(consulte la Lista 2 de las señales del manual de la Lista de captura)
Analog outputs / Exp analog outs / Analog output 2X / An out 2X cfg6027 An out 2X scale N/A RWS 1 -10 10 PP V-F-S-B
Factor de escala o multiplicativo de la salida analógica 2X
6025 An out 2X hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 2X destinado a obtener +10V. El valor debe ser superior a cero
6026 An out 2X lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 2X destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Exp analog outs / Analog output 2X / An out 2X mon6028 An out 2X mon [cnt] R 0.00 -32768 32676 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 2X

168 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Analog outputs / Exp analog outs / Analog output 3X / An out 3X src4092 An out 3X src N/A RWS IPA 4000 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 3X(consulte la Lista 2 de las señales del manual de la Lista de captura)
Analog outputs / Exp analog outs / Analog output 3X / An out 3X cfg6034 An out 3X type N/A RWS 0 0 1 DP V-F-S-B
0 0..20 mA1 4..20 mAPermite seleccionar el tipo de salida analógica 3X (Se requiere la tarjeta opcional EXP-D20A6)
6032 An out 3X scale N/A RWS 1 -10 10 PP V-F-S-BFactor de escala o multiplicativo de la salida analógica 3X
6030 An out 3X hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 3X destinado a obtener +10V. El valor debe ser superior a cero
6031 An out 3X lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 3X destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Exp analog outs / Analog output 3X / An out 3X mon6033 An out 3X mon [cnt] R 0.00 -32768 32676 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 3X
Analog outputs / Exp analog outs / Analog output 4X / An out 4X src4093 An out 4X src N/A RWS IPA 400 0 List 2 V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida analógica 4X(consulte la Lista 2 de las señales del manual de la Lista de captura)
Analog outputs / Exp analog outs / Analog output 4X / An out 4X cfg6039 An out 4x type N/A RWS 0 0 1 DP V-F-S-B
0 0..20 mA1 4..20 mAPermite seleccionar el tipo de salida analógica 4X (Se requiere la tarjeta opcional EXP-D20A6)
6037 An out 4X scale N/A RWS 1 -10 10 PP V-F-S-BFactor de escala o multiplicativo de la salida analógica 4X
6035 An out 4X hi lim [cnt] RWS 16383 0 32767 PP V-F-S-BValor de recuento de la salida analógica 4X destinado a obtener +10V. El valor debe ser superior a cero
6036 An out 4X lo lim [cnt] RWS -16384 -32768 0 PP V-F-S-BValor de recuento de la salida analógica 4X destinado a obtener -10V. El valor debe ser superior a cero
Analog outputs / Exp analog outs / Analog output 4X / An out 4X mon6038 An out 4X mon [cnt] R 0.00 -32768 32676 PP V-F-S-B
Visualización del valor del recuento de la salida analógica 4X
Analog outputs / Exp analog outs / Exp ana out en3901 Exp ana out en N/A RWS 0 0 1 DV V-F-S-B
0 Deshabilitado1 HabilitadoHabilita las salidas analógicas ampliadas

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 169
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIG / Digital inputsLa función Digital Input Block permite invertir la señal en la placa del terminal.Por ejemplo, si el potencial disponible en la placa del terminal es +24V, y la inversión está deshabilitada (noinvertida) el estada de la entrada es 1 (ONE), configuración estándar; si la inversión está habilitada (inversión) elestado de la entrada es 0 (NULL). El ENABLE del drive está ajustado a “Digital input 0”; esta condición no sepuede cambiar mientras se ejecute mediante el hardware. De todas formas, su función se puede combinar conuna señal de comando en las fuentes de los otros Bloques. La señal “DI 0 Enable mon” (Señal de la entradadigital 0) está disponible en la “Lista 3”.
F
Hw Drive Enable
En/ DI 0
Di 1
DI 2 inversion
Not invertedDI 2 monitor
DI 0 Enable mon
DI 3 inversion
Not inverted
DI 4 inversion
Not inverted
DI 5 inversion
Not inverted
DI 6 inversion
Not inverted
DI 7 inversion
Not inverted
DI 3 monitor
DI 4 monitor
DI 5 monitor
DI 6 monitor
DI 7 monitor
DI 1 inversion
DI 1 monitor
I/O CONFIG / Digital inputs / Std digital inps / Std dig inp cfg4011 DI 1 inversion N/A RWS 0 0 1 DP V-F-S-B
0 No invertido1 Invertido
4012 DI 2 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4013 DI 3 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4014 DI 4 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4015 DI 5 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4016 DI 6 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Inverted
4017 DI 7 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido

170 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIG / Digital inputs / Std digital inps / Std dig inp mon4020 DI 0 Enable mon N/A R 0 0 1 DV V-F-S-B
Visualización del terminal Enable
4021 DI 1 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 1
4022 DI 2 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 2
4023 DI 3 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 3
4024 DI 4 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 4
4025 DI 5 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 5
4026 DI 6 monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 6
Digital Input 6 terminal displaying4027 DI 7 monitor N/A R 0 0 1 DV V-F-S-B
Visualización del terminal de la entrada digital 7
4028 DI 7654321E N/A R 0 0 - DP V-F-S-BVisualización de las entradas digitales estándares. Debajo de cada número se visualiza el estadológico de cada entrada simple.
I/O CONFIG / Digital inputs / Exp digital inps / Exp dig inp cfg4030 DI 0X inversion N/A RWS 0 0 1 DP V-F-S-B
0 No invertido1 Invertido
4031 DI 1X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4032 DI 2X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4033 DI 3X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4034 DI 4X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4035 DI 5X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4036 DI 6X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4037 DI 7X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 171
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
4038 DI 8X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4039 DI 9X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4040 DI 10X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4041 DI 11X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
I/O CONFIG / Digital inputs / Exp digital inps / Exp dig inp mon4045 DI 0X monitor N/A R 0 0 1 DV V-F-S-B
Visualización del terminal de la entrada digital 0X
4046 DI 1X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 1X
4047 DI 2X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 2X
4048 DI 3X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 3X
4049 DI 4X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 4X
4050 DI 5X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 5X
4051 DI 6X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 6X
4052 DI 7X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 7X
4053 DI 8X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 8X
4054 DI 9X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 9X
4055 DI 10X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 10X
4056 DI 11X monitor N/A R 0 0 1 DV V-F-S-BVisualización del terminal de la entrada digital 11X
4057 DIX BA9876543210 N/A R 0 0 - DV V-F-S-BVisualización de las entradas digitales ampliadas. Debajo de cada número se visualiza el estado lógicode cada entrada simple.
I/O CONFIG / Digital inputs / Exp dig inp en3902 Exp dig inp en N/A RWS 0 0 1 DV V-F-S-B
0 Deshabilitado1 HabilitadoHabilita las entradas digitales ampliadas

172 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIG / Digital inputs / DestinationsEste menú de sólo lectura permite al usuario ver donde se conectan las entradas digitales. Si hay más de unafuente conectada a una entrada digital, sólo se muestra una.Si no hay fuentes conectadas, se visualiza el mensaje “Not used”.
4505 DI 0 Enable dstVisualiza el destino de la entrada digital 0 (Enable)
4506 DI 1 dstVisualiza el destino de la entrada digital 1
4507 DI 2 dstVisualiza el destino de la entrada digital 2
4508 DI 3 dstVisualiza el destino de la entrada digital 3
4509 DI 4 dstVisualiza el destino de la entrada digital 4
4510 DI 5 dstVisualiza el destino de la entrada digital 5
4511 DI 6 dstVisualiza el destino de la entrada digital 6
4512 DI 7 dstVisualiza el destino de la entrada digital 7
4513 DI 0X dstVisualiza el destino de la entrada digital 0X
4514 DI 1X dstVisualiza el destino de la entrada digital 1X
4515 DI 2X dstVisualiza el destino de la entrada digital 2X
4516 DI 3X dstVisualiza el destino de la entrada digital 3X
4517 DI 4X dstVisualiza el destino de la entrada digital 4X
4518 DI 5X dstVisualiza el destino de la entrada digital 5X
4519 DI 6X dstVisualiza el destino de la entrada digital 6X
4520 DI 7X dstVisualiza el destino de la entrada digital 7X
4521 DI 8X dstVisualiza el destino de la entrada digital 8X
4522 DI 9X dstVisualiza el destino de la entrada digital 9X
4523 DI 10X dstVisualiza el destino de la entrada digital 10X
4524 DI 11X dstVisualiza el destino de la entrada digital 11X

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 173
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIG / Digital outputsLos bloques de las salidas digitales permiten convertir una señal interna en una señal disponible en la placa del terminal.
F
.
.
.
.DO 0
DO 1 srcSpd is zero dly
DO 0 inversion
DO 2 src
NULL
DO 3 srcNULL
DO 0X src
NULL
DO 1X srcNULL
DO 2X srcNULL
DO 3X srcNULL
DO 4X src
NULL
DO 5X srcNULL
DO 6X srcNULL
DO 7X srcNULL
DO 0 src
Drive OK
DO 1 inversion
Not inverted
DO 2 inversionNot inverted
DO 3 inversionNot inverted
DO 0X inversion
Not inverted
DO 1X inversionNot inverted
DO 2X inversionNot inverted
DO 3X inversionNot inverted
DO 4X inversionNot inverted
DO 5X inversionNot inverted
DO 6X inversionNot inverted
DO 7X inversionNot inverted
Exp dig out en
Disabled
I/O CONFIG / Digital outputs / Std digital outs / Std dig out src4065 DO 0 src N/A RWS IPA 9097 List 1 PIN V-F-S-B
IPA 9097 Drive OK = Por defectoPermite conectar la señal seleccionada a la salida digital 0 y también puede definir las condiciones a lasque pondrán fin los contactos del relé. Por ejemplo:Drive OK El contacto se cierra cuando el drive está activado sin alarmas de fallos.Drive Ready El contacto se cierra cuando se cumplen las siguientes condiciones:
- El drive está activado- No se presentan alarmas de fallos- El drive está habilitado. La operación de habilitación está definida por los parámetros [En/disable mode] & [Commands sel]- El procedimiento magnetizante se ha completado (El drive está preparado para entregar el par)
¡NOTA! El contacto se abre inmediatamente con un fallo del drive, o cuando el drive estádeshabilitado. (consulte la Lista 1 de las señales del manual de la Lista de captura)

174 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
4066 DO 1 src N/A RWS IPA 7123 List 1 PIN V-F-S-BIPA 7123 BRAKE cont mon = Por defectoPermite conectar la señal seleccionada a la salida digital 2(consulte la Lista 1 de las señales del manual de la Lista de captura)
4067 DO 2 src N/A RWS IPA 161 List 1 PIN V-F-S-BIPA 161 Drive ready = Por defectoPermite conectar la señal seleccionada a la salida digital 3(consulte la Lista 1 de las señales del manual de la Lista de captura)
4068 DO 3 src N/A RWS IPA 3728 List 1 PIN V-F-S-BIPA 3728 Speed is zero = Por defectoPermite conectar la señal seleccionada a la salida digital 2(consulte la Lista 1 de las señales del manual de la Lista de captura)
I/O CONFIG / Digital outputs / Std digital outs / Std dig out cfg4060 DO 0 inversion N/A RWS 0 0 1 DP V-F-S-B
0 No invertido1 Invertido
4061 DO 1 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4062 DO 2 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4063 DO 3 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
I/O CONFIG / Digital outputs / Std digital outs / Std dig out mon4064 DO 3210 N/A RWS 0 0 - DP V-F-S-B
El estado lógico de la salida digital se visualiza debajo de cada número
I/O CONFIG / Digital outputs / Exp digital outs / Exp dig out src4080 DO 0X src N/A RWS IPA 7122 List 1 PIN V-F-S-B
IPA 7122 RUN cont mon = Por defectoPermite conectar la señal seleccionada a la salida digital 0X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4081 DO 1X src N/A RWS IPA 7120 List 1 PIN V-F-S-BIPA 7120 UP cont mon = Por defectoPermite conectar la señal seleccionada a la salida digital 1X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4082 DO 2X src N/A RWS IPA 7121 List 1 PIN V-F-S-BIPA 7121 DOWN cont mon = Por defectoPermite conectar la señal seleccionada a la salida digital 2X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4083 DO 3X src N/A RWS IPA 7139 List 1 PIN V-F-S-BIPA 7139 Door open mon = Por defectoPermite conectar la señal seleccionada a la salida digital 3X(consulte la Lista 1 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 175
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.4084 DO 4X src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida digital 4X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4085 DO 5X src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida digital 5X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4086 DO 6X src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida digital 6X(consulte la Lista 1 de las señales del manual de la Lista de captura)
4087 DO 7X src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal seleccionada a la salida digital 7X(consulte la Lista 1 de las señales del manual de la Lista de captura)
I/O CONFIG / Digital outputs / Exp digital outs / Exp dig out cfg4070 DO 0X inversion N/A RWS 0 0 1 DP V-F-S-B
0 No invertido1 Invertido
4071 DO 1X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4072 DO 2X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4073 DO 3X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4074 DO 4X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4075 DO 5X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4076 DO 6X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
4077 DO 7X inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 Invertido
I/O CONFIG / Digital outputs / Exp digital outs / Exp dig out mon4078 DOX 76543210 N/A R 0 0 - DP V-F-S-B
El estado lógico de la salida digital (de la tarjeta de ampliación) se visualiza debajo de cada número

176 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
I/O CONFIG / Digital outputs / Exp dig out en3903 Exp dig out en N/A RWS 0 0 1 DV V-F-S-B
0 Deshabilitado1 HabilitadoHabilita las salidas digitales ampliadas
I/O CONFIG / Bits->WordEl Word Composing Block, “Bits->Word”, es útil para establecer la conexión, por ejemplo, entre el drive y latarjeta APC: se puede componer una palabra hecha de Drive ready, Drive ok, Ref is zero, Speed is zero, paracomunicarse con una simple palabra.El Bits->Wordn Block tiene 16 entradas, que cada una de ellas se puede conectar a una señal, la salida deltheWord compn Block contiene los bits empaquetados de la entrada.Existen dos bloques “Bits->Word” disponibles.
WORD_0BIT_0
BIT_15
BIT_1
BIT_14
W0 comp outWord0 B0 src
Word0 B1 src
Word0 B14 src
Word0 B15 src
WORD_1 W1 comp out
............... .......
I/O CONFIG / Bits->Word / Bits->Word0 src2100 Word0 B0 src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal de Bit 0 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2101 Word0 B1 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 1 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2102 Word0 B2 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 2 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2103 Word0 B3 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 3 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2104 Word0 B4 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 4 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2105 Word0 B5 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 5 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2106 Word0 B6 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 6 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 177
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.2107 Word0 B7 src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal de Bit 7 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2108 Word0 B8 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 8 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2109 Word0 B9 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 9 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2110 Word0 B10 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 10 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2111 Word0 B11 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 11 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2112 Word0 B12 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 12 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2113 Word0 B13 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 13 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2114 Word0 B14 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 14 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
2115 Word0 B15 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 15 seleccionada a Word 0(consulte la Lista 1 de las señales del manual de la Lista de captura)
I/O CONFIG / Bits->Word / Bits->Word0 mon2116 W0 comp out N/A R 0 0 - DV V-F-S-B
Control para el valor de la salida hexadecimal de “Word 0”
I/O CONFIG / Bits->Word / Bits->Word1 src9340 Word1 B0 src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal de Bit 0 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9341 Word1 B1 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 1 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)

178 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9342 Word1 B2 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 2 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9343 Word1 B3 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 3 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9344 Word1 B4 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 4 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9345 Word1 B5 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 5 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9346 Word1 B6 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 6 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9347 Word1 B7 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 7 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9348 Word1 B8 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 8 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9349 Word1 B9 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 9 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9350 Word1 B10 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 10 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9351 Word1 B11 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 11 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9352 Word1 B12 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 12 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9353 Word1 B13 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 13 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 179
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.9354 Word1 B14 src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la señal de Bit 14 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
9355 Word1 B15 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defectoPermite conectar la señal de Bit 15 seleccionada a Word 1(consulte la Lista 1 de las señales del manual de la Lista de captura)
I/O CONFIG / Bits->Word / Bits->Word1 mon9356 W1 comp out N/A R 0 0 - DV V-F-S-B
Control para el valor de la salida hexadecimal de “Word 1”
I/O CONFIG / Word->BitsEl Word Decomposing Block, “Word->Bits”, permite ajustar algunas señales en una palabra digital; cada señalque compone la palabra, en la entrada del Bloque, se puede combinar con un canal de salida. Es útil paraestablecer la comunicación, por ejemplo, entre la tarjeta APC y el drive.El bloque “Wordn->Bits” tiene una palabra de entrada y 16 bits de salida Bx Wn decomp.Existen dos bloques “Word->Bits” disponibles.
WORD_0 BIT_0
......
BIT_14
BIT_1
BIT_15
W0 decomp src B0 W0 decomp -> Bits
B15 W0 decomp -> Bits
B14 W0 decomp -> Bits
................
B1 W0 decomp -> BitsWORD_1W1 decomp src
I/O CONFIG / Word->Bits / Word0->Bits src2120 W0 decomp src N/A RWS IPA 2121 List 26 PIN V-F-S-B
IPA 2121 W0 decomp inp = Por defectoPermite conectar el word que se se entrará en el bloque de descomposición(consulte la Lista 26 de las señales del manual de la Lista de captura)
I/O CONFIG / Word->Bits / Word0->Bits cfg2121 W0 decomp inp N/A RWS 0X0000 - - DV V-F-S-B
Permite ajustar el valor «W0 decomp inp»
I/O CONFIG / Word->Bits / Word0->Bits mon2122 W0 decomp mon N/A R 0 0 - DP V-F-S-B
Control del valor de entrada hexadecimal del Word 0 descompuesto
2123 B0 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 0 del Word 0 descompuesto
2124 B1 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 1 del Word 0 descompuesto
2125 B2 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 2 del Word 0 descompuesto

180 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.2126 B3 W0 decomp N/A R 0 0 1 DV V-F-S-B
Visualización del Bit 3 del Word 0 descompuesto
2127 B4 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 4 del Word 0 descompuesto
2128 B5 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 5 del Word 0 descompuesto
2129 B6 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 6 del Word 0 descompuesto
2130 B7 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 7 del Word 0 descompuesto
2131 B8 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 8 del Word 0 descompuesto
2132 B9 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 9 del Word 0 descompuesto
2133 B10 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 10 del Word 0 descompuesto
2134 B11 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 11 del Word 0 descompuesto
2135 B12 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 12 del Word 0 descompuesto
2136 B13 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 13 del Word 0 descompuesto
2137 B14 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 14 del Word 0 descompuesto
2138 B15 W0 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 15 del Word 0 descompuesto
I/O CONFIG / Word->Bits / Word1->Bits src9361 W1 decomp src N/A RWS IPA 9360 List 27 PIN V-F-S-B
IPA 9360 W1 decomp inp = Por defectoPermite conectar el word que se se entrará en el bloque de descomposición(consulte la Lista 27 de las señales del manual de la Lista de captura)
I/O CONFIG / Word->Bits / Word1->Bits cfg9360 W1 decomp inp N/A RWS 0X0000 - - DV V-F-S-B
Permite ajustar el valor “W1 decomp inp”
I/O CONFIG / Word->Bits / Word1->Bits mon9362 W1 decomp mon N/A R 0 0 - DP V-F-S-B
Control del valor de entrada hexadecimal del Word 1 descompuesto
9363 B0 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 0 del Word 1 descompuesto
9364 B1 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 1 del Word 1 descompuesto
9365 B2 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 2 del Word 1 descompuesto
9366 B3 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 3 del Word 1 descompuesto

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 181
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9367 B4 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 4 del Word 1 descompuesto
9368 B5 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 5 del Word 1 descompuesto
9369 B6 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 6 del Word 1 descompuesto
9370 B7 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 7 del Word 1 descompuesto
9371 B8 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 8 del Word 1 descompuesto
9372 B9 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 9 del Word 1 descompuesto
9373 B10 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 10 del Word 1 descompuesto
9374 B11 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 11 del Word 1 descompuesto
9375 B12 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 12 del Word 1 descompuesto
9376 B13 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 13 del Word 1 descompuesto
9377 B14 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 14 del Word 1 descompuesto
9378 B15 W1 decomp N/A R 0 0 1 DV V-F-S-BVisualización del Bit 15 del Word 1 descompuesto
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado.Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”

182 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
ALARM CONFIGALARM CONFIGALARM CONFIGALARM CONFIGALARM CONFIGSe permite el acceso al menú ALARM CONFIG mediante la contraseña del Nivel 1: 12345. Se debe ajustar en elmenú SERVICE.En el menú ALARM CONFIG se puede configurar el comportamiento de las alarmas del drive mediante lassiguientes funciones:- Activity Permite ajustar la acción para llevarla a cabo después de la intervención de la alarma, como:
0 Only msg alarmq Acciones: Message1 Ignore Acciones: ninguna2 Warning Acciones: Message – Status3 Disable drive Acciones: Message – Commands for SM – Status4 Stop Acciones: Message – Commands for SM – Status5 Fast stop Acciones: Message – Commands for SM – Status6 Curr limstop Acciones: Message – Commands for SM – StatusSignificado de las acciones:
Message Significa que el mensaje se ha enviado a la “Alarm list” ya la lista “Alarm log list”.
Commands for SM Comandos State Machine : Se ha forzado un cambio enel estado del drive (intervención de alarma).
Status La señal de la alarma activada se ajusta inmediatamente, sevuelve a ajustar cuando la alarma ya no está presente y el estado
del equipo no se encuentra en la condición de alarma.- Restart Permite habilitar el inicio automático después de haber eliminado la causa de la alarma.
0 Off1 On
- Restart Time Permite ajustar un periodo de tiempo, dentro del cual se tiene que eliminar el estado de laalarma, para ejecutar un inicio automático.
- Hold Off Time Permite ajustar un periodo de tiempo, en el cual tiene que permanecer una condición de alarmaespecífica activada (tiene que persistir) para poder tener en cuenta una situación de alarma.Se puede ajustar un periodo de tiempo de milisegundos, en el que el drive no reconozca elestado de alarma. Por lo tanto, la alarma sólo se reconoce si persiste durante un periodomás largo al “Hola off time” ajustado
ALARM CONFIG / Fault reset9076 Fault reset src N/A RWS IPA 4027 List 3 PIN V-F-S-B
IPA 4027 DI 7 monitor = Por defectoUtilizando la fuente “Fault reset src”, se puede seleccionar el origen de la señal del comando “reset”,
por ejemplo un comando mediante la placa del terminal a través de la entrada digital(consulte la Lista 3 de las señales del manual de la Lista de captura)
ALARM CONFIG / UndervoltageSe desconecta cuando el voltaje en el enlace de CC del drive es inferior al umbral mínimoen función del ajuste del voltaje de la línea.
9050 UV restart N/A RWS 1 0 1 DP V-F-S-B0 off1 onReinicio del bajo voltaje
9051 UV restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio del bajo voltaje
396 UV select src N/A RWSZ IPA 4001 List 3 PIN V-F-S-BFuente para desactivar la alarma de infravoltaje a través de la entrada digital 1. Debe utilizarse de formaexclusiva con la Alimentación del módulo de emergencia. La alimentación principal debe estar desactivada.

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 183
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
ALARM CONFIG / OvervoltageSe desconecta cuando el voltaje en el enlace de CC del drive es superior al umbral máximo en funcióndel ajuste del voltaje de la línea.
9052 OV restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio de la sobretensión
9053 OV restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio de la sobretensión
ALARM CONFIG / IGBT desaturatSe desconecta cuando el circuito de sensibilidad de desaturación de la compuerta detecta la sobreintensidadinstantánea del IGBT9046 DS restart N/A RWS 0 0 1 DP V-F-S-B
0 off1 onReinicio de desaturación del IGBT
9047 DS restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio de desaturación del IGBT
ALARM CONFIG / Inst overcurrentSe desconecta cuando el sensor de corriente de salida detecta la sobreintensidad instantánea del IGBT9063 IOC restart N/A RWS 0 0 1 DP V-F-S-B
0 off1 onReinicio de la sobreintensidad instantánea
9064 IOC restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio de la sobreintensidad instantánea
ALARM CONFIG / Ground faultSe desconecta cuando la fase de salida descarga a tierra
9640 GF activity N/A RWS 2 1 6 DP V-F-S-B1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpGround fault activity
9641 GF threshold [A] RWS D.Size Calc D.Size PP V-F-S-BUmbral de fallos a tierra
ALARM CONFIG / External faultSe desconecta cuando la entrada de fallos externos está activada9075 EF src N/A RWS IPA 4023 List 3 PIN V-F-S-B
IPA 4000 NULL = Por defectoPermite conectar la placa del terminal de entrada de fallos externos(consulte la Lista 3 de las señales del manual de la Lista de captura)

184 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.9060 EF activity N/A RWS 3 2 6 DP V-F-S-B
1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de fallos externos
9061 EF restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio de fallos externos
9062 EF restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio de fallos externos
9600 EF hold off [ms] RWS 0 0 30000 PP V-F-S-BEspera de los fallos externos
ALARM CONFIG / Motor OTCalentamiento del motor indicado mediante contacto térmico o termistor PTC en los terminales de la tarjeta deregulación del drive 78-79
9065 MOT activity N/A RWS 2 2 6 DP V-F-S-B2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad del calentamiento del motor
9066 MOT restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio del calentamiento del motor
9067 MOT restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio del calentamiento del motor
9603 MOT hold off [ms] RWS 1000 0 30000 PP V-F-S-BEspera del calentamiento del motor
ALARM CONFIG / Heatsink S OTCalentamiento del sensor del radiador (detectado por un sensor)9054 HTS activity N/A RWS 3 2 6 DP V-F-S-B
2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad del calentamiento del sensor del radiador
9055 HTS restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio del calentamiento del sensor del radiador
9056 HTS restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio del calentamiento del sensor del radiador
9604 HTS hold off [ms] RWS 1000 0 30000 PP V-F-S-BEspera del calentamiento del sensor del radiador

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 185
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
ALARM CONFIG / Regulation S OTCalentamiento del sensor de la tarjeta de regulación
9057 RGS activity N/A RWS 3 2 6 DP V-F-S-B2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad del calentamiento del sensor de la tarjeta de regulación
9058 RGS restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio del calentamiento del sensor de la tarjeta de regulación
9059 RGS restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio del calentamiento del sensor de la tarjeta de regulación
9605 RGS hold off [ms] RWS 10000 0 30000 PP V-F-S-BEspera del calentamiento del sensor de la tarjeta de regulación
ALARM CONFIG / Intake air S OTCalentamiento del sensor del aire aspirado (sólo para el modelo AVyL 4185 y posteriores)
9087 IAS activity N/A RWS 3 2 6 DP V-F-S-B2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad del calentamiento del sensor del aire aspirado
9088 IAS restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onReinicio del calentamiento del sensor del aire aspirado
9089 IAS restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio del calentamiento del sensor del aire aspirado
9606 IAS hold off [ms] RWS 10000 0 30000 PP V-F-S-BEspera del calentamiento del sensor del aire aspirado
ALARM CONFIG / Contact feedbackSe desconecta cuando no se detecta la señal de realimentación del contacto.Se puede utilizar para controlar el estado del contactor de salida y alarmar cuando el comando y la realimentaciónno coincidan.
Digital output
set as RUN cont mon
Digital input
CNT feedback src set as Digital input X
K1MK2M
OUTPUT CONTACTOR
AUXCONTACTS
MAIN CONTACTS
7141 CNT feedback src N/A RWS IPA 7122 List 3 PIN V-F-S-BIPA 7122 RUN cont mon = Por defectoPermite seleccionar el origen de la señal de realimentación Contact(consulte la Lista 3 de las señales del manual de la Lista de captura)

186 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9068 CNT activity N/A RWS 3 1 6 DP V-F-S-B1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de alarma de la realimentación de contacto
7135 CNT hold off [ms] RWS 1000 0 30000 PP V-F-S-BEspera de la realimentación del contacto
RUN cont mon
CNT feedback src
AlarmNo Alarm
Alarm Cont fbk fail AlarmNo Alarm
Alarm
CNT
Holdoff
Holdoff
CNT
No Alarm
Alarm
ALARM CONFIG / Brake feedbackSe desconecta cuando no se detecta la señal de realimentación del frenado
7142 BRK feedback src N/A RWS IPA 7123 List 3 PIN V-F-S-BIPA 7123 BRAKE cont mon = Por defectoPermite seleccionar el origen de la señal de realimentación Brake(consulte la Lista 3 de las señales del manual de la Lista de captura)
9086 BRK activity N/A RWS 3 1 6 DP V-F-S-B1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de alarma de la realimentación de frenado
7136 BRK hold off [ms] RWS 1000 0 30000 PP V-F-S-BEspera de la realimentación del frenado
BRAKE cont mon
BRK feedback src
AlarmNo Alarm
AlarmNo Alarm
Alarm
BRK
Holdoff
Holdoff
BRK
Alarm Brake fbk fail
No Alarm
¡NOTA! Durante el frenado, las alarmas finales de estado activado se bloquean y sólo se indican enel estado brake idle

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 187
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
7145 BRK RUN hold off N/A RNS 1 0 1 DP V-F-S-BConfiguración de espera de realimentación del freno.0 Desactivado se informa de inmediato de una desconexión en la realimentación del freno1 On se informa de una eventual desconexión de la realimentación del freno al final
del recorrido. Permite que la caja llegue al suelo en el caso de encontrar unconmutador defectuoso de estado del freno.
ALARM CONFIG / Brake feedback / Door feedback7144 Door fbk src N/A RWS IPA 7139 List 3 PIN V-F-S-B
Fuente para proporcionar realimentación para comprobar el estado del comando proporcionado através de la entrada.
9099 Door activity N/A RWS 3 1 6 DP V-F-S-B1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de alarma de la realimentación de la puerta. (a partir de la versión 3.300 del software)
7137 Door hold off [ms] RWS 200 0.00 65535 PP V-F-S-BTiempo de espera de la alarma: durante este tiempo se ignora la conexión incorrecta en el comando y larealimentación.
Door open mon
Door fbk src
No AlarmAlarm Door fbk fail
Holdoff
Door
Command to open the door
ALARM CONFIG / Comm card faultSe desconecta cuando se interrumpe la comunicación LAN(comunicación LAN entre el drive y la tarjeta opcional Field Bus)9074 CCF activity N/A RWS 3 2 6 DP V-F-S-B
2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de fallos de la tarjeta Comm
4200 CCF restart N/A RWS 0 0 1 DP V-F-S-B0 off1 onRiavvio con errore Comm card
4201 CCF restart time [ms] RWS 1000 0 30000 PP V-F-S-BTiempo de reinicio de fallos de la tarjeta Comm
ALARM CONFIG / Appl card faultSe desconecta cuando se interrumpe la comunicación del coprocesador opcional (comunicación delcoprocesador entre el drive y la tarjeta opcional APC 100)

188 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9049 ACF activity N/A RWS 3 2 6 DP V-F-S-B2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de fallos de la tarjeta Appl
ALARM CONFIG / Drive overloadSe desconecta cuando el acumulador de sobrecarga del drive excede el umbral de desconexión9040 DOL activity N/A RWS 1 1 6 DP V-F-S-B
1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de sobrecarga del drive
ALARM CONFIG / Motor overloadSe desconecta cuando el acumulador de sobrecarga del motor excede el umbral de desconexión9041 MOL activity N/A RWS 2 1 6 DP V-F-S-B
1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstp
ALARM CONFIG / BU overloadSe desconecta cuando el acumulador de sobrecarga de la resistencia de frenado excede el umbral de desconexión9071 BUOL activity N/A RWS 3 1 6 DP V-F-S-B
2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de sobrecarga de la unidad de frenado
ALARM CONFIG / OverspeedSe desconecta cuando la velocidad del motor excede el umbral del límite de velocidad9220 OS activity N/A RWS 3 1 6 DP V-F-S-B
2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de sobrevelocidad
9221 OS threshold [rmp] RWS Calc 0.00 8192 PP V-F-S-BUmbral de sobrevelocidad
9608 OS hold off [ms] RWS 0 0 30000 PP V-F-S-BEspera de sobrevelocidad

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 189
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
ALARM CONFIG / Spd fbk lossSe desconecta cuando no se detecta la realimentación de la velocidad o la alimentación del encoder falla9042 SFL activity N/A RWS 3 1 6 DP V-F-S-B
1 Ignore2 Warning3 Disable drive4 Stop5 Fast stop6 Curr limstpActividad de Spd fbk loss
ALARM CONFIG / UV repetitiveSe desconecta cuando se detectan mas de un número programable de fallos de bajo voltaje, con el parámetro“UVR attempts”, en 4 minutos (tiempo programable con el parámetro “UVR delay”)
9043 UVR attempts N/A RWS 5 1 1000 PP V-F-S-BDetermina el número de fallos de bajo voltaje aceptados
9044 UVR delay [sec] RWS 240 1 262.14 PP V-F-S-BDetermina el parámetro “UVR attempts” de la ventana del tiempo
ALARM CONFIG / Hw faultSe desconecta cuando no se detecta la comunicación entre la tarjeta de regulación del drive y una de sus tarjetasopcionales
4202 Hw fault mon N/A R 0 0 0 DP V-F-S-B0 comunication OK1 comunication failed
ALARM CONFIG / Alarm statusEl estado de la alarma se puede indicar mediante tres palabras. Cada bit determina un estado de alarma. Por lotanto, es posible determinar el estado de 48 alarmas. Se puede controlar cada bit simple si el bit correspondientede una máscara especifica está ajustado con 1, de lo contrario su ajuste siempre es 0. Cuando se activa unaalarma, el bit correspondiente a la palabra se ajusta con 1. Sus ajustes permanecen iguales a 1 hasta que laalarma se inactive y el “State Machine or Sequencer” no se encuentre en condición de alarma (consulte losanteriores párrafos).Si el estado de una simple alarma se tiene que controlar mediante una salida, entonces sólo se tiene que ajustarcon 1 el bit que necesita máscara. Si el estado de varias alarmas se tiene que controlar mediante una salida,entonces se tienen que ajustar con 1 los bits que corresponden a la máscara. Lasalarmas se tienen que controlar con su propia palabra.
Es: el estado de la alarma de fallo externo se tiene que leer.Mask W1 S1 = 0x0100 => 0000 0001 0000 0000Mask W2 S1 = 0x0000 => 0000 0000 0000 0000Mask W3 S1 = 0x0000 => 0000 0000 0000 0000DO 0 src = Selezionare ipa Alm W1 S1.
El estado de la alarma de sobretensión y bajo voltaje se tiene que leer.Mask W1 S1 = 0x0100 => 0000 0000 0000 0110Mask W2 S1 = 0x0000 => 0000 0000 0000 0000Mask W3 S1 = 0x0000 => 0000 0000 0000 0000DO 0 src = Selezionare ipa Alm W1 S1.
El estado de la alarma de fallo externo y F_R_C se tiene que leer.Mask W1 S1 = 0x0100 => 0000 0001 0000 0000Mask W2 S1 = 0x0000 => 0000 0000 1000 0000DO 0 src = Select ipa Alm W1 S1DO 1 src = Selezionare ipa Alm W2 S1

190 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
Alarm status / Alm status cfg9610 Mask W1 S1 N/A RWS 0XFFF 0 -1 DP V-F-S-B9611 Mask W2 S1 N/A RWS 0XFFF 0 -1 DP V-F-S-B9612 Mask W3 S1 N/A RWS 0XFFF 0 -1 DP V-F-S-B9614 Mask W1 S2 N/A RWS 0XFFF 0 -1 DP V-F-S-B9615 Mask W2 S2 N/A RWS 0XFFF 0 -1 DP V-F-S-B9616 Mask W3 S2 N/A RWS 0XFFF 0 -1 DP V-F-S-B
Alarm status / Alm status mon9630 Alm W1 S1 N/A R 0 0 Calc DP V-F-S-B9631 Alm W2 S1 N/A R 0 0 Calc DP V-F-S-B9632 Alm W3 S1 N/A R 0 0 Calc DP V-F-S-B9634 Alm W1 S2 N/A R 0 0 Calc DP V-F-S-B9635 Alm W2 S2 N/A R 0 0 Calc DP V-F-S-B9636 Alm W3 S2 N/A R 0 0 Calc DP V-F-S-B
NOMBRE DE LA ALARMA
Pos
ició
ndel
BIT
enla
pala
bra
de
laala
rma
Cód
igo
en
la
LIS
TAde
ala
rmas
Act
ivid
ad
del
dri
vedes
pué
sde
laala
rma
ESP
ERA
Rei
nic
io
Tiem
po
de
rein
icio
Sol
icit
udde
adm
isió
n
Msg
ad
ala
rmq
Dig
Out
Failure supply 1 21 Drive deshabilitado No No No Sí Sí Sí
Undervoltage 2 22 Drive deshabilitado No Sí, según el núm. de veces Sí Sí Sí Sí
Overvoltage 3 23 Drive deshabilitado No Sí Sí Sí Sí Sí
IGBT desaturat 4 24 Drive deshabilitado No
Sí, cuando haya 2 alarmas en
30 segundos Sí Sí Sí Sí
Inst overcurrent 5 25 Drive deshabilitado No
Sí, cuando haya 2 alarmas en
30 segundos Sí Sí Sí Sí
Ground fault 6 26 Prog. No No No Sí Sí Sí
Curr fbk loss 7 27 Drive deshabilitado No No No Sí Sí Sí
External fault 8 28 Prog. Sí. Prog. Sí Sí. Prog. Sí Sí Sí
Spd fbk loss 9 29 Prog. No No No Sí Sí Sí
Module OT 10 30 Drive deshabilitado
Sí por 10
mseg fijos No No Sí Sí Sí
Heatsink OT 11 31 Drive deshabilitado
Sí por 1000
mseg fijos Sí Sí Sí
Motor OT 12 32 Prog. Sí. Prog. Sí Sí. Prog. Sí Sí Sí
Heatsink S OT 13 33 Prog. Sí. Prog. Sí Sí. Prog. Sí Sí Sí
Regulation S OT 14 34 Prog. Sí. Prog. Sí Sí. Prog. Sí Sí Sí
Intake air S OT 15 35 Prog. Sí. Prog. Sí Sí. Prog. Sí Sí Sí
Cont fbk fail 16 36 Prog. No Sí No Sí Sí Sí
Comm card fault 17 37 Prog. No Sí Sí. Prog. Sí Sí Sí
Appl card fault 18 38 Drive deshabilitado No No No Sí Sí Sí
Drive overload 19 39 Prog. No No No Sí Sí Sí
Motor overload 20 40 Prog. No No No Sí Sí Sí
BU overload 21 41 Prog. No No No Sí Sí Sí
Data lost 22 42 Drive deshabilitado No No No Sí Sí Sí
Brake fbk fail 23 43 Prog. No No No Sí Sí Sí
Max time 24 44 Drive deshabilitado No No No Sí Sí Sí
Sequencer 25 45 Drive deshabilitado No No No Sí Sí No
Door fbk fail 26 46 Prog. Sí No No Sí Sí Sí
Overspeed 27 47 Prog. Sí. Prog. No No Sí Sí Sí
UV repetitive 28 48 Drive deshabilitado No No No Sí Sí Sí
IOC repetitive 29 49 Drive deshabilitado No No No Sí Sí Sí
IGBTdesat repet 30 50 Drive deshabilitado No No No Sí Sí Sí
WatchDog user 31 51 Drive deshabilitado No No No Sí Sí Sí
Hw fail 32 52 Drive deshabilitado No No No Sí Sí Sí
Alarms status

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 191
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
COMMUNICACOMMUNICACOMMUNICACOMMUNICACOMMUNICATIONTIONTIONTIONTIONSe permite el acceso al menú COMMUNICATION mediante la contraseña del Nivel 1: 12345. Se debe ajustar en elmenú SERVICE.
RS485: Se puede elegir el protocolo de comunicación entre Slink4, Modbus, Jbus o ISO 1745 a través delparámetro “Protocol type”. Cada uno de estos protocolos permite una conexión en red de múltiples puntos. Paramás detalles, consulte el manual del protocolo especifico.La dirección del drive se puede definir mediante el parámetro “Slave address”. Editando el parámetro 105, “Slaveaddress”, y guardando el nuevo valor se ejecuta el cambio de dirección. La nueva dirección se activa después deque el drive se haya desactivado y activado de nuevo. También es posible un cambio de dirección temporalcuando se utiliza el protocolo Slink4 con un comando Slink4. Cuando se utiliza el protocolo Slink4, la línea deseries RS485 funciona en semi-dúplex, donde la información no se puede transmitir y recibir simultáneamente. Aveces es posible durante la transición desde los modos de transmisión a los de recepción, el Master (PC o PLC)consigue la condición de recepción después de que el drive ya haya empezado a enviar su paquete deinformación. Como consecuencia, el paquete recibido por el master es incorrecto. Para evitar esto, se puedeajustar el parámetro “Slave res time” para retardar la respuesta del drive de modo que el Master tenga el tiempo deconmutación del modo de muestra. Esta situación no se produce con los protocolos Modbus y Jbus mientras lapausa de sincronización entre los mensajes esté especificada por el protocolo y esté garantizada.
SBI: La comunicación con las tarjetas de opción SBI Field Bus (Interface de bus de la serie) se realiza a través dedos canales:
· Canal de sincronización o proceso (PDC Process Data Channel, Canal de información del proceso) para un intercambio de valor cíclico.· Canal de asincronía o de configuración para un acceso de prioridad inferior a todos los parámetros del drive.
Al igual que para los modos de intercambio de información entre la tarjeta SBI y la red consulte la documentaciónde la tarjeta SBI.El intercambio de información del proceso entre el drive y la SBI tiene la siguiente estructura:
- el interface está compuesto de seis palabras de escritura y seis palabras de lectura.- el parámetro principal del drive se tiene que definir para las seis palabras: “Drv -> SBI word” transmite la información desde el drive hasta la SBI.- Seis palabras desplazan la información desde la SBI hasta el drive: “SBI -> Drv word”
Para más información, consulte los siguientes documentos para la información relacionada con la SBI:SBI-PDP 33 Profibus de la tarjeta del interface – Manual de instrucciones DPSBI-DN 33 Tarjeta DeviceNet manual de instruccionesSBI-COP
COMMUNICATION / RS485105 Slave address N/A RWS 1 0 255 DK V-F-S-B
Define la dirección esclava del drive
106 Slave res time N/A RWS 1 0 255 DK V-F-S-BDefine el tiempo de la dirección esclava del drive
104 Protocol type N/A RWS 0 0 2 DK V-F-S-B0 Slink 41 Modbus2 Jbus3 ISO 17454 Protocolo Hyperface (Se utiliza para comunicar con los encoders absolutos Stegmann)Define el tipo de protocolo de comunicación del drive
103 Modbus regs mode N/A RWS 0 0 3 DK V-F-S-BAsignación del registro modbus al índice del parámetro.0 MSW : LSW reg=IPA1 LSW : MSW reg=IPA

192 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
2 MSW : LSW reg=2*IPA3 LSW : MSW reg=2*IPAMSW = most significant word (palabra más significativa)LSW = least significant word (palabra menos significativa)
COMMUNICATION / SBI config8999 SBI enable N/A RWS 0 0 1 DK V-F-S-B
0 Deshabilitado1 HabilitadoPermite habilitar las tarjetas de opción SBI Field Bus(Se requieren el comando SAVE PARAMETERS y la potencia de reciclado del drive)
COMMUNICATION / SBI monitor8998 Last SBI error N/A R 0 0 2 DP V-F-S-B
Define el último error encontrado:0 = OK (sin errores)1 = Guasto Hardware2 = Bus Loss
COMMUNICATION / Drv->SBI word
COMMUNICATION / Drv->SBI word / Drv->SBI W src9010 Drv SBI W0 src N/A RWS IPA 9020 List 40 PIN V-F-S-B
IPA 9020 Int Drv SBI W0 = Por defectoPermite seleccionar el origen de Word 0 a transmitir desde el drive a la tarjeta SBI(fare riferimento ai segnali Lista 40 del manuale Pick List)
9011 Drv SBI W1 src N/A RWS IPA 9021 List 40 PIN V-F-S-BIPA 9021 Int Drv SBI W1 = Por defectoPermite seleccionar el origen de Word 1 a transmitir desde el drive a la tarjeta SBI(consulte la Lista 40 de las señales del manual de la Lista de captura)
9012 Drv SBI W2 src N/A RWS IPA 9022 List 40 PIN V-F-S-BIPA 9022 Int Drv SBI W2 = Por defectoPermite seleccionar el origen de Word 2 a transmitir desde el drive a la tarjeta SBI(consulte la Lista 40 de las señales del manual de la Lista de captura)
9013 Drv SBI W3 src N/A RWS IPA 9023 List 40 PIN V-F-S-BIPA 9023 Int Drv SBI W3 = Por defectoPermite seleccionar el origen de Word 3 a transmitir desde el drive a la tarjeta SBI(consulte la Lista 40 de las señales del manual de la Lista de captura)
9014 Drv SBI W4 src N/A RWS IPA 9024 List 40 PIN V-F-S-BIPA 9024 Int Drv SBI W4 = Por defectoPermite seleccionar el origen de Word 4 a transmitir desde el drive a la tarjeta SBI(consulte la Lista 40 de las señales del manual de la Lista de captura)
9015 Drv SBI W5 src N/A RWS IPA 9025 List 40 PIN V-F-S-BIPA 9025 Int Drv SBI W5 = Por defectoPermite seleccionar el origen de Word 5 a transmitir desde el drive a la tarjeta SBI(consulte la Lista 40 de las señales del manual de la Lista de captura)
COMMUNICATION / Drv->SBI word / Drv->SBI W cfg9020 Int Drv SBI W0 N/A RWS 0.00 - - PV V-F-S-B
Configuración interna del valor Word 0 (conectada por defecto a Drv SBI W0 src)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 193
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.9021 Int Drv SBI W1 N/A RWS 0.00 - - PV V-F-S-B
Configuración interna del valor Word 1 (conectada por defecto a Drv SBI W1 src)
9022 Int Drv SBI W2 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Word 2 (conectada por defecto a Drv SBI W2 src)
9023 Int Drv SBI W3 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Word 3 (conectada por defecto a Drv SBI W3 src)
9024 Int Drv SBI W4 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Word 4 (conectada por defecto a Drv SBI W4 src)
9025 Int Drv SBI W5 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Word 5 (conectada por defecto a Drv SBI W5 src)
COMMUNICATION / Drv->SBI word / Drv->SBI W mon9030 Drv SBI W0 mon N/A R 0.00 - - PP V-F-S-B
Control del Word 0 del canal PDC en la salida del drive
9031 Drv SBI W1 mon N/A R 0.00 - - PP V-F-S-BControl del Word 1 del canal PDC en la salida del drive
9032 Drv SBI W2 mon N/A R 0.00 - - PP V-F-S-BControl del Word 2 del canal PDC en la salida del drive
9033 Drv SBI W3 mon N/A R 0.00 - - PP V-F-S-BControl del Word 3 del canal PDC en la salida del drive
9034 Drv SBI W4 mon N/A R 0.00 - - PP V-F-S-BControl del Word 4 del canal PDC en la salida del drive
9035 Drv SBI W5 mon N/A R 0.00 - - PP V-F-S-BControl del Word 5 del canal PDC en la salida del drive
COMMUNICATION / SBI->Drv word
COMMUNICATION / SBI->Drv word / SBI->Drv W mon9000 SBI Drv W0 mon N/A R 0.00 - - PP V-F-S-B
Control del Word 0 del canal PDC en la entrada del drive
9001 SBI Drv W1 mon N/A R 0.00 - - PP V-F-S-BControl del Word 1 del canal PDC en la entrada del drive
9002 SBI Drv W2 mon N/A R 0.00 - - PP V-F-S-BControl del Word 2 del canal PDC en la entrada del drive
9003 SBI Drv W3 mon N/A R 0.00 - - PP V-F-S-BControl del Word 3 del canal PDC en la entrada del drive
9004 SBI Drv W4 mon N/A R 0.00 - - PP V-F-S-BControl del Word 4 del canal PDC en la entrada del drive
9005 SBI Drv W5 mon N/A R 0.00 - - PP V-F-S-BControl del Word 5 del canal PDC en la entrada del drive
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado.Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.

194 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”
APPL CARD CONFIGAPPL CARD CONFIGAPPL CARD CONFIGAPPL CARD CONFIGAPPL CARD CONFIGSe permite el acceso al menú APPL CARD CONFIG mediante la contraseña del Nivel 1: 12345. Se debe ajustar enel menú SERVICE.Se utiliza una tarjeta de opción APC para las aplicaciones avanzadas del ascensor.La comunicación entre el drive y la APC se realiza a través de dos canales para cada dirección.
· del drive a la APC: “Drv->DGFCS” escribe hasta 5 palabras síncronas del drive“Drv->DGFCA” escribe hasta 10 palabras asíncronas del drive
· de la APC al drive: “DGFCS->Drv” lee a partir de 5 palabras síncronas de la APC“DGFCA->Drv” lee a partir de 10 palabras asíncronas de la APC
Las palabras que trasladan la información desde la APC hasta el drive se pueden encontrar en las listas deselección principales.Para más información siga las instrucciones del manual de la tarjeta DGFC-386y-1 (tarjeta APC100)
APPL CARD CONFIG / DGFC / DGFC config4129 DGFC enable N/A RWS 0 0 1 DK V-F-S-B
0 Deshabilitado1 HabilitadoPermite habilitar las tarjetas de opción APC(Se requieren el comando SAVE PARAMETERS y la potencia de reciclado del drive)
APPL CARD CONFIG / DGFC / DGFC sync Ch
APPL CARD CONFIG / DGFC / Drv->DGFCS W src4100 Drv DGFC-S W0src N/A RWS IPA 4105 List 29 PIN V-F-S-B
IPA 4105 Int DrvDGFC-S W0 = Por defectoPermite seleccionar el origen de Synchronous Word 0 a transmitir desde el drive a la tarjeta APC(consulte la Lista 29 de las señales del manual de la Lista de captura)
4101 Drv DGFC-S W1src N/A RWS IPA 4106 List 29 PIN V-F-S-BIPA 4106 Int DrvDGFC-S W1 = Por defectoPermite seleccionar el origen de Synchronous Word 1 a transmitir desde el drive a la tarjeta APC(consulte la Lista 29 de las señales del manual de la Lista de captura)
4102 Drv DGFC-S W2src N/A RWS IPA 4107 List 29 PIN V-F-S-BIPA 4107 Int DrvDGFC-S W2 = Por defectoPermite seleccionar el origen de Synchronous Word 2 a transmitir desde el drive a la tarjeta APC(consulte la Lista 29 de las señales del manual de la Lista de captura)
4103 Drv DGFC-S W3src N/A RWS IPA 4108 List 29 PIN V-F-S-BIPA 4108 Int DrvDGFC-S W3 = Por defectoPermite seleccionar el origen de Synchronous Word 3 a transmitir desde el drive a la tarjeta APC(consulte la Lista 29 de las señales del manual de la Lista de captura)
4104 Drv DGFC-S W4src N/A RWS IPA 4109 List 29 PIN V-F-S-BIPA 4109 Int DrvDGFC-S W4 = Por defectoPermite seleccionar el origen de Synchronous Word 4 a transmitir desde el drive a la tarjeta APC(consulte la Lista 29 de las señales del manual de la Lista de captura)
APPL CARD CONFIG / DGFC / Drv->DGFCS W cfg4105 Int DrvDGFC-S W0 N/A RWS 0.00 - - PV V-F-S-B
Configuración interna del valor Synchronous Word 0 (conectada por defecto a Drv DGFC-S W0src)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 195
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
4106 Int DrvDGFC-S W1 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Synchronous Word 1 (conectada por defecto a Drv DGFC-S W1src)
4107 Int DrvDGFC-S W2 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Synchronous Word 2 (conectada por defecto a Drv DGFC-S W2src)
4108 Int DrvDGFC-S W3 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Synchronous Word 3 (conectada por defecto a Drv DGFC-S W3src)
4109 Int DrvDGFC-S W4 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Synchronous Word 4 (conectada por defecto a Drv DGFC-S W4src)
APPL CARD CONFIG / DGFC / Drv->DGFCS W mon4110 Drv DGFC-S W0mon N/A R 0.00 - - PP V-F-S-B
Control del Synchronous Word 0 (desde el drive a DGFC)
4111 Drv DGFC-S W1mon N/A R 0.00 - - PP V-F-S-BControl del Synchronous Word 1 (desde el drive a DGFC)
4112 Drv DGFC-S W2mon N/A R 0.00 - - PP V-F-S-BControl del Synchronous Word 2 (desde el drive a DGFC)
4113 Drv DGFC-S W3mon N/A R 0.00 - - PP V-F-S-BControl del Synchronous Word 3 (desde el drive a DGFC)
4114 Drv DGFC-S W4mon N/A R 0.00 - - PP V-F-S-BControl del Synchronous Word 4 (desde el drive a DGFC)
APPL CARD CONFIG / DGFC / DGFCS->Drv W mon4120 DGFC-S Drv W0mon N/A R 0.00 - - PV V-F-S-B
Control del Synchronous Word 0 (desde DGFC al drive)
4121 DGFC-S Drv W1mon N/A R 0.00 - - PV V-F-S-BControl del Synchronous Word 1 (desde DGFC al drive)
4122 DGFC-S Drv W2mon N/A R 0.00 - - PV V-F-S-BControl del Synchronous Word 2 (desde DGFC al drive)
4123 DGFC-S Drv W3mon N/A R 0.00 - - PV V-F-S-BControl del Synchronous Word 3 (desde DGFC al drive)
4124 DGFC-S Drv W4mon N/A R 0.00 - - PV V-F-S-BControl del Synchronous Word 4 (desde DGFC al drive)
APPL CARD CONFIG / DGFC / DGFC async Ch
APPL CARD CONFIG / DGFC / Drv->DGFCA W src4130 Drv DGFC-A W0src N/A RWS IPA 4140 List 30 PIN V-F-S-B
IPA 4140 Int DrvDGFC-A W0 = Por defectoPermite seleccionar el origen de Asynchronous Word 0 a transmitir desde el drive a la tarjeta DGFC(fare riferimento ai segnali Lista 30 del manuale Pick List)
4131 Drv DGFC-A W1src N/A RWS IPA 4141 List 30 PIN V-F-S-BIPA 4141 Int DrvDGFC-A W1 = Por defectoPermite seleccionar el origen de Asynchronous Word 1 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4132 Drv DGFC-A W2src N/A RWS IPA 4142 List 30 PIN V-F-S-BIPA 4142 Int DrvDGFC-A W2 = Por defectoPermite seleccionar el origen de Asynchronous Word 2 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4133 Drv DGFC-A W3src N/A RWS IPA 4143 List 30 PIN V-F-S-BIPA 4143 Int DrvDGFC-A W3 = Por defecto

196 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.Permite seleccionar el origen de Asynchronous Word 3 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4134 Drv DGFC-A W4src N/A RWS IPA 4144 List 30 PIN V-F-S-BIPA 4144 Int DrvDGFC-A W4 = Por defectoPermite seleccionar el origen de Asynchronous Word 4 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4135 Drv DGFC-A W5src N/A RWS IPA 4145 List 30 PIN V-F-S-BIPA 4145 Int DrvDGFC-A W5 = Por defectoPermite seleccionar el origen de Asynchronous Word 5 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4136 Drv DGFC-A W6src N/A RWS IPA 4146 List 30 PIN V-F-S-BIPA 4146 Int DrvDGFC-A W6 = Por defectoPermite seleccionar el origen de Asynchronous Word 6 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4137 Drv DGFC-A W7src N/A RWS IPA 4147 List 30 PIN V-F-S-BIPA 4147 Int DrvDGFC-A W7 = Por defectoPermite seleccionar el origen de Asynchronous Word 7 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4138 Drv DGFC-A W8src N/A RWS IPA 4148 List 30 PIN V-F-S-BIPA 4148 Int DrvDGFC-A W8 = Por defectoPermite seleccionar el origen de Asynchronous Word 8 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
4139 Drv DGFC-A W9src N/A RWS IPA 4149 List 30 PIN V-F-S-BIPA 4149 Int DrvDGFC-A W9 = Por defectoPermite seleccionar el origen de Asynchronous Word 9 a transmitir desde el drive a la tarjeta DGFC(consulte la Lista 30 de las señales del manual de la Lista de captura)
APPL CARD CONFIG / DGFC / Drv->DGFCA W cfg4140 Int DrvDGFC-A W0 N/A RWS 0.00 - - PV V-F-S-B
Configuración interna del valor Asynchronous Word 0 (conectada por defecto a Drv DGFC-A W0src)
4141 Int DrvDGFC-A W1 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 1 (conectada por defecto a Drv DGFC-A W0src)
4142 Int DrvDGFC-A W2 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 2 (conectada por defecto a Drv DGFC-A W0src)
4143 Int DrvDGFC-A W3 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 3 (conectada por defecto a Drv DGFC-A W0src)
4144 Int DrvDGFC-A W4 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 4 (conectada por defecto a Drv DGFC-A W0src)
4145 Int DrvDGFC-A W5 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 5 (conectada por defecto a Drv DGFC-A W0src)
4146 Int DrvDGFC-A W6 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 6 (conectada por defecto a Drv DGFC-A W0src)
4147 Int DrvDGFC-A W7 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 7 (conectada por defecto a Drv DGFC-A W0src)
4148 Int DrvDGFC-A W8 N/A RWS 0.00 - - PV V-F-S-BConfiguración interna del valor Asynchronous Word 8 (conectada por defecto a Drv DGFC-A W0src)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 197
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.4149 Int DrvDGFC-A W9 N/A RWS 0.00 - - PV V-F-S-B
Configuración interna del valor Asynchronous Word 9 (conectada por defecto a Drv DGFC-A W0src)
APPL CARD CONFIG / DGFC / Drv->DGFCA W mon4150 Drv DGFC-A W0mon N/A R 0.00 - - PP V-F-S-B
Control del Asynchronous Word 0 (desde el drive a DGFC)
4151 Drv DGFC-A W1mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 1 (desde el drive a DGFC)
4152 Drv DGFC-A W2mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 2 (desde el drive a DGFC)
4153 Drv DGFC-A W3mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 3 (desde el drive a DGFC)
4154 Drv DGFC-A W4mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 4 (desde el drive a DGFC)
4155 Drv DGFC-A W5mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 5 (desde el drive a DGFC)
4156 Drv DGFC-A W6mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 6 (desde el drive a DGFC)
4157 Drv DGFC-A W7mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 7 (desde el drive a DGFC)
4158 Drv DGFC-A W8mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 8 (desde el drive a DGFC)
4159 Drv DGFC-A W9mon N/A R 0.00 - - PP V-F-S-BControl del Asynchronous Word 9 (desde el drive a DGFC)
APPL CARD CONFIG / DGFC / DGFCA->Drv W mon4160 DGFC-A Drv W0mon N/A R 0.00 - - PV V-F-S-B
Control del Asynchronous Word 0 (desde DGFC al drive)
4161 DGFC-A Drv W1mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 1 (desde DGFC al drive)
4162 DGFC-A Drv W2mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 2 (desde DGFC al drive)
4163 DGFC-A Drv W3mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 3 (desde DGFC al drive)
4164 DGFC-A Drv W4mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 4 (desde DGFC al drive)
4165 DGFC-A Drv W5mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 5 (desde DGFC al drive)
4166 DGFC-A Drv W6mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 6 (desde DGFC al drive)
4167 DGFC-A Drv W7mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 7 (desde DGFC al drive)
4168 DGFC-A Drv W8mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 8 (desde DGFC al drive)

198 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
4169 DGFC-A Drv W9mon N/A R 0.00 - - PV V-F-S-BControl del Asynchronous Word 9 (desde DGFC al drive)
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado.Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 199
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
CUSTOM FUNCTIONSCUSTOM FUNCTIONSCUSTOM FUNCTIONSCUSTOM FUNCTIONSCUSTOM FUNCTIONSSe permite el acceso al menú CUSTOM FUNCTIONS mediante la contraseña del Nivel 1: 12345. Se debe ajustar enel menú SERVICE.COMPARE: El Bloque proporciona dos Comparadores de señal, Compare 1 y Compare 2, con las mismascaracterísticas.Cada Comparador se encuentra en posición para comparar dos o tres señales de entrada (INP0, INP1, INP2).Algunas comparaciones permiten ajustar una ventana mediante Cmp x window, estableciendo un intervaloaceptable entre las señales.Ejemplo:-INP0 y INP1 se tienen que comparar como “INP0 = INP1”
INP0 = +1000countINP1 = +1000countWindow = 100count
En este caso la igualdad es válida para una variación máxima total de INP1 entre 1100 y 900 recuentos.Posibles variaciones:
Ninguna ningunaI0 = = I1 INP0-window ≤ INP1 ≤ INP0+windowI0 != I1 INP1 inferior a INP0-window o INP1 superior a INP0+windowI0 < I1 INP0 inferior a INP1I0 > I1 INP0 superior a INP1I0 < I1 > I2 INP0<INP1<INP2 (INP1 included between..)|I0| == |I1| INP0| -window ≤ |INP1| ≤ |INP0| +window|I0| != |I1| INP1| inferior a |INP0| -window, o |INP1| superior a |INP0| +window|I0| < |I1| INP0| inferior a |INP1||I0| > |I1| INP0| superior a |INP1||I0| < |I1| < |I2| INP0| <|INP1| <|INP2| (|INP1|I0 AND I1 AND I2 AND lógico entre I0, I1 and I2I0 OR I1 OR I2 OR lógico entre I0, I1 and I2I0 XOR I1 XOR lógico entre I0 and I1
CUSTOM FUNCTIONS / Compare / Compare 1
CUSTOM FUNCTIONS / Compare / Compare 1 / Compare 1 src6049 Cmp 1 inp 0 src N/A RWS IPA 6041 List 5 PIN V-F-S-B
IPA 6041 Cmp 1 inp 0 = DefaultPermite seleccionar el origen de la señal de entrada 0 que hay que comparar al bloque Compare 1(consulte la Lista 5 de las señales del manual de la Lista de captura)
6050 Cmp 1 inp 1 src N/A RWS IPA 6042 List 5 PIN V-F-S-BIPA 6042 Cmp 1 inp 1 = DefaultPermite seleccionar el origen de la señal de entrada 1 que hay que comparar al bloque Compare 1(consulte la Lista 5 de las señales del manual de la Lista de captura)
6051 Cmp 1 inp 2 src N/A RWS IPA 6043 List 5 PIN V-F-S-BIPA 6043 Cmp 1 inp 2 = DefaultPermite seleccionar el origen de la señal de entrada 2 que hay que comparar al bloque Compare 1(consulte la Lista 5 de las señales del manual de la Lista de captura)
CUSTOM FUNCTIONS / Compare / Compare 1 / Compare 1 cfg6041 Cmp 1 inp 0 N/A RWS 0.00 - - PV V-F-S-B
Valor de la señal de entrada interna 0, conectada por defecto a Cmp 1 inp 0 src

200 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
6042 Cmp 1 inp 1 N/A RWS 0.00 - - PV V-F-S-BValor de la señal de entrada interna 1, conectada por defecto a Cmp 1 inp 1 src
6043 Cmp 1 inp 2 N/A RWS 0.00 - - PV V-F-S-BValor de la señal de entrada interna 2, conectada por defecto a Cmp 1 inp 2 src
6044 Cmp 1 function N/A RWS 0 0 10 DP V-F-S-B0 Ninguno1 I0 == I12 I0 != I13 I0 < I14 I0 > I15 I0 < I1 < I26 |I0| == |I1|7 |I0| != |I1|8 |I0| < |I1|9 |I0| > |I1|10 |I0|< |I1| <|I2|11 I0 AND I1 AND I212 I0 OR I1 AND I213 I0 XOR I1
6045 Cmp 1 window [cnt] RWS 0.00 0.00 - PP V-F-S-BPermite ajustar una ventana estableciendo un intervalo aceptable entre las señales del bloque Compare 1
6046 Cmp 1 delay [sec] RWS 0.00 0.00 30 PP V-F-S-BPermite ajustar un retardo de segundos en la transición de comparación en el bloque Compare 1
6047 Cmp 1 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 InvertidoPermite invertir la señal de salida del bloque Compare 1
CUSTOM FUNCTIONS / Compare / Compare 1 / Compare 1 mon6048 Compare 1 output N/A R 0 0 1 DV V-F-S-B
Permite controlar el estado de la señal de salida del bloque Compare 10 = FALSE1 = TRUE
CUSTOM FUNCTIONS / Compare / Compare 2
CUSTOM FUNCTIONS / Compare / Compare 2 / Compare 2 src6064 Cmp 2 inp 0 src N/A RWS IPA 6056 List 6 PIN V-F-S-B
IPA 6056 Cmp 2 inp 0 = Por defectoPermite seleccionar el origen de la señal de entrada 0 que hay que comparar al bloque Compare 2(consulte la Lista 6 de las señales del manual de la Lista de captura)
6065 Cmp 2 inp 1 src N/A RWS IPA 6057 List 6 PIN V-F-S-BIPA 6057 Cmp 2 inp 1 = Por defectoPermite seleccionar el origen de la señal de entrada 1 que hay que comparar al bloque Compare 2(consulte la Lista 6 de las señales del manual de la Lista de captura)
6066 Cmp 2 inp 2 src N/A RWS IPA 6058 List 6 PIN V-F-S-BIPA 6058 Cmp 2 inp 2 = Por defectoPermite seleccionar el origen de la señal de entrada 2 que hay que comparar al bloque Compare 2(consulte la Lista 6 de las señales del manual de la Lista de captura)

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 201
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
CUSTOM FUNCTIONS / Compare / Compare 2 / Compare 2 cfg6056 Cmp 2 inp 0 N/A RWS 0.00 - - PV V-F-S-B
Valor de la señal de entrada interna 0, conectada por defecto a Cmp 2 inp 0 src
6057 Cmp 2 inp 1 N/A RWS 0.00 - - PV V-F-S-BValor de la señal de entrada interna 1, conectada por defecto a Cmp 2 inp 1 src
6058 Cmp 2 inp 2 N/A RWS 0.00 - - PV V-F-S-BValor de la señal de entrada interna 2, conectada por defecto a Cmp 2 inp 2 src
6059 Cmp 2 function N/A RWS 0 0 10 DP V-F-S-B0 Ninguno1 I0 == I12 I0 != I13 I0 < I14 I0 > I15 I0 < I1 < I26 |I0| == |I1|7 |I0| != |I1|8 |I0| < |I1|9 |I0| > |I1|10 |I0|< |I1| <|I2|11 I0 AND I1 AND I212 I0 OR I1 AND I213 I0 XOR I1
6060 Cmp 2 window [cnt] RWS 0.00 0.00 - PP V-F-S-BPermite ajustar una ventana estableciendo un intervalo aceptable entre las señales del bloque Compare 2
6061 Cmp 2 delay [sec] RWS 0.00 0.00 30 PP V-F-S-BPermite ajustar un retardo de segundos en la transición de comparación en el bloque Compare 2
6062 Cmp 2 inversion N/A RWS 0 0 1 DP V-F-S-B0 No invertido1 InvertidoPermite invertir la señal de salida del bloque Compare 2
CUSTOM FUNCTIONS / Compare / Compare 2 / Compare 2 mon6063 Compare 2 output N/A R 0 0 1 DV V-F-S-B
Permite controlar el estado de la señal de salida del bloque Compare 20 = FALSE1 = TRUE
CUSTOM FUNCTIONS / Pad parametersLas variables de uso, “Pads”, se utilizan para el intercambio de información con las tarjetas de opción
CUSTOM FUNCTIONS / Pad parameters / Pad param word9100 Pad 0 N/A RWS 0 - - PV V-F-S-B
Pad 0 analógico
9101 Pad 1 N/A RWS 0 - - PV V-F-S-BPad 1 analógico
9102 Pad 2 N/A RWS 0 - - PV V-F-S-BPad 2 analógico
9103 Pad 3 N/A RWS 0 - - PV V-F-S-BPad 3 analógico

202 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9104 Pad 4 N/A RWS 0 - - PV V-F-S-BPad 4 analógico
9105 Pad 5 N/A RWS 0 - - PV V-F-S-BPad 5 analógico
9106 Pad 6 N/A RWS 0 - - PV V-F-S-BPad 6 analógico
9107 Pad 7 N/A RWS 0 - - PV V-F-S-BPad 7 analógico
9108 Pad 8 N/A RWS 0 - - PV V-F-S-BPad 8 analógico
9109 Pad 9 N/A RWS 0 - - PV V-F-S-BPad 9 analógico
9110 Pad 10 N/A RWS 0 - - PV V-F-S-BPad 10 analógico
9111 Pad 11 N/A RWS 0 - - PV V-F-S-BPad 11 analógico
9112 Pad 12 N/A RWS 0 - - PV V-F-S-BPad 12 analógico
9113 Pad 13 N/A RWS 0 - - PV V-F-S-BPad 13 analógico
9114 Pad 14 N/A RWS 0 - - PV V-F-S-BPad 14 analógico
9115 Pad 15 N/A RWS 0 - - PV V-F-S-BPad 15 analógico
CUSTOM FUNCTIONS / Pad parameters / Pad param bit9116 Dig pad 0 N/A RWS 0 0 1 DV V-F-S-B
Pad 0 digital
9117 Dig pad 1 N/A RWS 0 0 1 DV V-F-S-BPad 1 digital
9118 Dig pad 2 N/A RWS 0 0 1 DV V-F-S-BPad 2 digital
9119 Dig pad 3 N/A RWS 0 0 1 DV V-F-S-BPad 3 digital
9120 Dig pad 4 N/A RWS 0 0 1 DV V-F-S-BPad 4 digital
9121 Dig pad 5 N/A RWS 0 0 1 DV V-F-S-BPad 5 digital
9122 Dig pad 6 N/A RWS 0 0 1 DV V-F-S-BPad 6 digital
9123 Dig pad 7 N/A RWS 0 0 1 DV V-F-S-BPad 7 digital
9124 Dig pad 8 N/A RWS 0 0 1 DV V-F-S-BPad 8 digital
9125 Dig pad 9 N/A RWS 0 0 1 DV V-F-S-BPad 9 digital

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 203
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
9126 Dig pad 10 N/A RWS 0 0 1 DV V-F-S-BPad 10 digital
9127 Dig pad 11 N/A RWS 0 0 1 DV V-F-S-BPad 11 digital
9128 Dig pad 12 N/A RWS 0 0 1 DV V-F-S-BPad 12 digital
9129 Dig pad 13 N/A RWS 0 0 1 DV V-F-S-BPad 13 digital
9130 Dig pad 14 N/A RWS 0 0 1 DV V-F-S-BPad 14 digital
9131 Dig pad 15 N/A RWS 0 0 1 DV V-F-S-BPad 15 digital
CUSTOM FUNCTIONS / ConnectEsta función de bloque conecta las señales al área de bloque programable, utilizando los parámetros del drive queson accesibles a través de programa de PC «Conf99» o del menú del teclado del drive.Connect A, conecta hasta 7 señales de entrada analógicasConnect B, conecta hasta 7 señales de entrada digitales
CUSTOM FUNCTIONS / Connect/ Connect A6070 ConnectA inp 0 src N/A RWS IPA 4000 List 2 PIN V-F-S-B
IPA 4000 NULL = Por defecto
6071 ConnectA inp 1 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6072 ConnectA inp 2 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6073 ConnectA inp 3 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6074 ConnectA inp 4 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6075 ConnectA inp 5 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6076 ConnectA inp 6 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
6077 ConnectA inp 7 src N/A RWS IPA 4000 List 2 PIN V-F-S-BIPA 4000 NULL = Por defecto
CUSTOM FUNCTIONS / Connect/ Connect B6078 ConnectB inp 0 src N/A RWS IPA 4000 List 1 PIN V-F-S-B
IPA 4000 NULL = Por defecto
6079 ConnectB inp 1 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
6080 ConnectB inp 2 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
6081 ConnectB inp 3 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto

204 • Capítulo 9 – Parámetros ARTDriveL Manual de instrucciones
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
6082 ConnectB inp 4 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
6083 ConnectB inp 5 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
6084 ConnectB inp 6 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
6085 ConnectB inp 7 src N/A RWS IPA 4000 List 1 PIN V-F-S-BIPA 4000 NULL = Por defecto
SAVE PARAMETERSEl drive AVyL permite dos comandos diferentes para guardar los parámetros modificados en el modo deregulación seleccionado:• con el menú STARTUP, el comando “Save Config?”• con todos los otros menús, el comando “SAVE PARAMETERS”Cualquier cambio realizado en el menú STARTUP requiere el comando “Save Config?”, que guarda todo el modode regulación seleccionado.Se recomienda cada vez que el usuario realiza cambios en el menú STARTUP.El comando “SAVE PARAMETERS” sólo guarda los cambios realizados fuera del menú STARTUP.Cuando en la pantalla del teclado aparece el mensaje “Use Save Config” parpadeando, utilice el comando “SaveConfig?”

ARTDriveL Manual de instrucciones Capítulo 9 – Parámetros • 205
IPA Descripción [Unidad] Acceso Por defecto Mín Máx Formato Modo de reg.
SERVICESERVICESERVICESERVICESERVICEEl menú SERVICE permite ajustar la contraseña para habilitar los menús del drive del nivel 1: 12345.Para tener acceso a los menús del drive del nivel 1, edite la contraseña 12345 en el parámetro “Insert Password”y confírmela con el botón “Enter”.
¡NOTA! La contraseña del nivel 1 debe editarse con cada reciclado del drive
El menú SERVICE también permite ajustar la contraseña para habilitar el menú del drive del nivel 2: pregunte lacontraseña del nivel 2 a los técnicos del servicio.Para tener acceso a los menús del drive del nivel 2:
1_ edite la contraseña 12345 en el parámetro “Insert Password” y confírmela con el botón “Enter”2_ compruebe la contraseña a través del parámetro “Check password” utilizando el botón “Enter”

206 • Capítulo 10 – Solucionar problemas ARTDriveL Manual de instrucciones
Capítulo 10 – Solucionar problemas
Cuando el LED rojo de “Alarm” parpadea, está indicando una (o más)condiciones de alarma.
Figura 10.1: Teclado y estado del Led
Consulte los siguientes pasos para ver la alarma y restablecerla:
R: S:
MONITOR
Alarm
Alarm list
Spd fbk Loss
Alarm list
Sequencer
Alarm list
<no alarm>
Acknowledged
If still active
If not active the enty
is deleted from the list
Sequencer is reset by
using the “0” key
1) Pulse Shift + Alarm . Se visualizará la “Lista de alarmas”.
2) Pulse Enter una o más veces hasta que aparezca el mensaje“Sequencer”, para reconocer las alarmas.
¡NOTA! Si la alarma aún está activa, el LED rojo volverá a parpadear. Si no estáactiva, el LED rojo se detendrá.
3) Pulse la tecla [O] para restablecer el secuenciador. La lista de alarmasmuestra todas las alarmas que se han producido, tanto las debidas aprotecciones como a errores al excederse los valores límite. Parahacerlas desaparecer de la lista de alarmas, se tiene que reconocer laalarma. El reconocimiento sólo es posible cuando la alarma ya no estáactivada. Las alarmas se reconocen automáticamente al cabo de dosminutos.
El led de alarma se iluminaEn el caso de que se produzca una alarma,este led se ilumina con un color rojointermitente.

ARTDriveL Manual de instrucciones Capítulo 10 – Solucionar problemas • 207
¡NOTA! Al pulsar Enter se reconoce la alarma. Reconocer la alarma sólo hará quese elimine de la lista de alarmas activadas. Si la condición de la alarmatambién provoca una desconexión del drive, la secuencia también deberárestablecerse. Esto se puede hacer pulsando la tecla [O]. El drive no sepuede volver a habilitar o iniciar después de una desconexión a no serque se restablezca el secuenciador del drive. El Equipo de estado deldrive controla el funcionamiento e inicio del drive, justificando laprotección y las alarmas, la secuencia de los comandos y el estado derestablecimiento. La siguiente tabla muestra diversos estados defuncionamiento por el número de estado del secuenciador:
Estado del
secuenciadorEstado
1 Funcionamiento de la magnetización2 Magnetización completada, Parada3 Arranque4 Parada de emergencia, Parada5 Parada de emergencia, Arranque9 Sin alarma, el drive está preparado para aceptar todos los comandos
10 El funcionamiento de la magnetización y el comando de Arranque están presentes12 Alarma activada16 Alarma desactivada, esperando el restablecimiento
TAV3i020
Para leer el estado del secuenciador del Equipo de estado, diríjase al menú:
⎡ ⎤R: S:MONITOR⎣ ⎦
⎡ ⎤Output voltage0 V⎣ ⎦
3 veces para
⎡ ⎤MONITORAdvanced status⎣ ⎦
⎡ ⎤DC link voltage580 V⎣ ⎦
3 veces para
⎡ ⎤Sequencer status12⎣ ⎦
10.1 Lista de eventos de alarma de regulación
La tabla 10.1.1 proporciona una descripción de los eventos de alarma deregulación y la información de cómo configurar el comportamientoprevisto del drive en su aparición (cuando sea conveniente).

208 • Capítulo 10 – Solucionar problemas ARTDriveL Manual de instrucciones
Tabla 10.1.1 Eventos de alarma de regulación
Failure supply Disable drive No No NA 21 1Han fallado uno o más circuitos de alimentación en la sección de control.
Undervoltage Disable drive No Si Si 22 2La lógica se basa en el número de intentos
El voltaje en el enlace de CC del drive es inferior al umbral mínimo para el ajuste del voltaje de línea proporcionado.
Overvoltage Disable drive No Si Si 23 3El voltaje en el enlace de CC del drive es superior al umbral máximo para el ajuste del voltaje de línea proporcionado.
IGBT desat flt Disable drive No Si Si 24 4No más de 2 intentos en 30 segundos.
El circuito de sensibilidad de desaturación de la compuerta detectó la sobreintensidad instantánea del IGBT.
Inst Overcurrent Disable drive No Si Si 25 5No más de 2 intentos en 30 segundos.
El sensor de corriente de salida detectó la sobreintensidad instantánea del IGBT.
Ground fault Programable No No Si 26 6Descarga de la fase de salida a tierra.
Curr fbk loss Disable drive No No No 27 7Se detectó un fallo de la realimentación del sensor de corriente o de la fuente de alimentación.
External fault Programable Programm. Si Programm. 28 8La entrada de fallo externa está activada.
Spd fbk loss Programable No No No 29 9Se detectó un fallo del sensor de realimentación de velocidad o de la fuente de alimentación.
Module OT Disable drive Costante, 10 msec No No 30 10El sensor interno detectó el calentamiento del IGBT (sólo para modelos de 0,75 a 20 Hp).
Heatsink OT Disable drive Constant, 1000 msec No No 31 11El contacto térmico detectó el calentamiento del radiador (sólo para modelos de 25 Hp y superiores).
Motor OT Programable Programm Si Programm. 32 12El contacto térmico o el termistor de PTC detectaron el calentamiento del motor.
Heatsink S OT Programable Programm Si Programm. 33 13El umbral del sensor de temperatura lineal del radiador era excesivo.
Regulat S OT Programable Programm Si Programm. 34 14El umbral del sensor de temperatura lineal de la tarjeta de regulación era excesivo.
Intake Air S OT Programable Programm Si Programm. 35 15El umbral del sensor de temperatura lineal de la entrada de aire de refrigeración era excesivo (sólo para modelos de25Hp y superiores).
Cont fbk fail Programable No Si No 36 16Se desconecta cuando no se detecta la señal de realimentación del contacto.
Comm card fault Programable No Si Programm. 37 17EFallo de la tarjeta de comunicación LAN opcional.
Appl card fault Disable drive No No No 38 18Umbral de desconexión excedente del acumulador de sobrecarga del drive.
Nom
bre
de la
alar
ma
Des
crip
ción
Act
ivid
ad d
eldr
ive
desp
ués
de la
alar
ma
Espe
ra
Rei
nici
o
Tiem
po d
ere
inic
io
Cód
igo
en la
lista
de
alar
mas
Posi
ción
del
bit e
n la
list
ade
ala
rmas

ARTDriveL Manual de instrucciones Capítulo 10 – Solucionar problemas • 209
Drv overload Programable No No No 39 19Umbral de desconexión excedente del acumulador de sobrecarga del drive.
Mot overload Programable No No No 40 20Umbral de desconexión excedente del acumulador de sobrecarga del motor.
BU overload Programable No No No 41 21El acumulador de sobrecarga de la resistencia de frenado ha sobrepasado el umbral de desconexión.
Data lost Disable drive No No No 42 22Información corrompida en la memoria no volátil.
Brake fbk fail Programable No No No 43 23Se desconecta cuando no se detecta la señal de realimentación del frenado.
Max time Disable drive No No No 44 24Se detectó el exceso del tiempo de la tarea del software.
Sequencer Disable drive No No No 45 25La alarma causó la inhabilitación del drive.
Door fbk fail Disable drive Si No No 46 26Se desconecta cuando no se detecta la señal de realimentación de la puerta.
Overspeed No Si No No 47 27Se excedió el umbral de velocidad máximo mientras el drive se encontraba en el estado RUN.
UV repetitive Disable drive No No No 48 28Si el nº. de fallos está ajustado al máximo la alarma se inhabilita.
En 5 minutos se detectan más de un número programable de fallos de UV.
IOC repetitive Disable drive No No No 49 29En 30 segundos se detectan más de 2 fallos de OC.
IGBTdesat repet Disable drive No No No 50 30En 30 segundos se detectan más de 2 fallos de desat del IGBT.
WatchDog user Disable drive No No No 51 31Para volver a desconectar el guardián de la comunicación dentro del tiempo especificado el drive falló.
Hw fail Disable drive No No No 52 32Fallo de comunicación entre la tarjeta de regulación del drive y una de sus opciones o expansiones de E/O.
Nom
bre
de la
alar
ma
Des
crip
ción
Act
ivid
ad d
eldr
ive
desp
ués
de la
alar
ma
Espe
ra
Rei
nici
o
Tiem
po d
ere
inic
io
Cód
igo
en la
lista
de
alar
mas
Posi
ción
del
bit e
n la
list
ade
ala
rmas

210 • Capítulo 10 – Solucionar problemas ARTDriveL Manual de instrucciones
10.2 Lista de eventos de alarma de error de la base de datos y dela configuración
LIntroducir información perjudicial o conflictiva en las configuracióndel drive hará que se visualicen errores de usuario.Estos tipos de errores pueden ser:- Errores de configuración- Errores de la base de datos (Errores DB)Para las descripciones, consulte los siguientes párrafos.
Ajuste del tamaño del drive
¡NOTA! Si el Usuario cambia el tamaño del drive, el drive mostrará: Drv size:tamaño actual – tamaño anterior. Por ejemplo: Tamaño del drive: 0 - 1
10.2.1 Errores de configuración
Los errores de configuración se pueden producir introduciendoinformación de parámetros incompatible o no válida. El drive informadel error de configuración mediante la siguiente descripción de ejemplo:
Calc error: Calc error numberParam: Param error number
El número Calc error denota la causa del cálculo no válido. El númeroCalc error está compuesto de la siguiente manera:Número Calc error = Offset + Código de error
LEl Offset denota el tipo de error:0 para errores específicos100 para errores originados por el cálculo de la base de datos
(consulte el párrafo del error de la DB)500 para errores producidos por el cálculo de coma flotante
(excepción, dividir por cero etc..)600 para errores originados por los cálculos de la configuración
(gama, etc.).
El Código de error denota la causa del origen del error, consulte la listade valores a continuación.
Listas de valores del código de error
Valores del código de error para Offset 0:0 sin errores1 señal no procesada en el estado actual del configurador2 no se puede detener la regulación3 error de exportación de la fórmula4 error de importación de la fórmula5 error mientras se carga información de autoregulación6 error mientras se carga información del motor

ARTDriveL Manual de instrucciones Capítulo 10 – Solucionar problemas • 211
7 reservado8 error mientras se carga información específica del cliente9 error mientras se carga información del tamaño del drive10 error mientras se escribe el archivo size.ini11 error mientras se aplica la base de datos. No hay funcionamiento
porque se han producido errores durante el cálculo del grupo.Para restablecer los errores es necesario volver a introducir lainformación, y confirmar la corrección
12 del error mientras se guardan demasiados cambios
Valores del código de error para Offset 100: Consulte los errores de laDB, sección 10.2.3
Valores del código de error para Offset 500 (500 + código de error):
3 Integer overflow (Desbordamiento de entero)4 Floating overflow (Desbordamiento de coma flotante)5 Floating underflow (Flujo flotante insuficiente)7 Divide by zero (Dividir por cero)9 Undefined float (Coma flotante indefinida)10 Conversion error (Error de conversión)11 Floating point stack underflow (Flujo insuficiente para una
pila de coma flotante)12 Floating point stack overflow (Desbordamiento de una pila de
coma flotante)
Valores del código de error para Offset 600 (600 + código de error):
0 no error (sin errores)1 switching freq. error (error freq. de conmutación)2 mains voltage error (error de voltaje de red)3 ambient temperature error (error de temperatura ambiente)4 regulation mode error (error del modo de regulación)5 take selection error (error de la selección de la toma)6 base speed error (error de la velocidad base)7 drive size error (error del tamaño del drive)
Por ejemplo, el número de error de Calc 606 es un error deconfiguración (600) causado por el valor de la base de la velocidad (6)fuera del alcance. El número de error de Param no es significativo.
10.2.2 Errores de la base de datos (Errori DB)
Los errores DB se producen por un ajuste incorrecto en un únicoparámetro. Este problema se origina en el cálculo de la base de datos.Por ejemplo, los más frecuentes son:- Límite de error de DB ALTO- Límite de error de DB BAJOEl drive visualiza el error de la DB del mensaje en este formato:DB err IPA: código de error
La IPA denota el número de parámetro que causa el cálculo de error dela DB. El código de error denota el tipo de error.
¡NOTA!Consulte el capítulo 12Índice de parámetros

212 • Capítulo 10 – Solucionar problemas ARTDriveL Manual de instrucciones
Se visualiza un ejemplo de error de DB del mensaje: DB ERR 3420: 5Esto significa que el error DB está causado pro la IPA 3420 (V/f voltage)que se encuentra debajo del límite inferior, el código de error 5 denota elerror del tipo (para la lista de los valores del código de error DB consulte acontinuación). Para encontrar el límite inferior, que depende de laconfiguración del drive, es posible acceder al parámetro V/f voltage del teclado.Pulse la tecla Shift y luego la tecla Help, se visualizará lo siguiente:
Max ValueMin ValueDef(ault) ValueUnitRaw valueIPADescripción(Access) mode
En la mayoría de casos es suficiente con ajustar un nuevo valor que sesitúe dentro los límites.
Lista de códigos de error de la DB
0 Sin error1 SBI PROBLEM 0x012 Generic error3 Attribute not exist4 Limit High5 Limit Low11 Division by zero12 Int Overflow13 Int Undefflow14 Long Overflow15 Long Underflow16 Domain Error17 Indirection Error18 Reached wrong eof19 Dbase not configured20 Value not valid21 Process doesn’t reply22 Wrong record size23 Attribute read only24 SBI PROBLEM 0x0125 Command not yet implemented26 Command wrong27 Read file error28 Header wrong29 Reserved for internal use30 Parameter not exist31 Parameter read only32 Parameter “z” only48 SBI PROBLEM 0x30

ARTDriveL Manual de instrucciones Capítulo 10 – Solucionar problemas • 213
10.2.3 Lista de códigos de error para todos los procedimientos deregulación automática
Los diferentes procedimientos de regulación automática para elregulador de corriente, el regulador de flujo, el regulador de velocidad ola calibración de entrada analógica pueden generar mensajes de error quese describen en la sección 10.2.2 .
Tabla 10.2.3.1: Mensajes de error de los procedimientos de regulación automática
Error n. Texto de error Descripción0 Sin error1 Abort El usuario ha pulsado la tecla Escape o O, o ha eliminado la habilitación de la
permisiva (inferior a 12 términos)2 DB access <IPA> Se ha producido un intento de acceso a la base de datos del índice especificado
durante el procedimiento de regulación automática3 No break point Fallo en la medida de la distorsión de voltaje del convertidor4 Rs high lim Fallo en la medida de la resistencia estátor del motor5 Rs low lim Fallo en la medida de la resistencia estátor del motor6 DTL high lim Fallo en el control de la compensación para la distorsión del voltaje del convertidor7 DTL low lim Fallo en el control de la compensación para la distorsión del voltaje del convertidor8 DTS high lim Fallo en el control de la compensación para la distorsión del voltaje del convertidor9 DTS low lim Fallo en el control de la compensación para la distorsión del voltaje del convertidor10 LsS high lim Fallo en el cálculo de la inductancia de la pérdida del motor11 LsS low lim Fallo en el cálculo de la inductancia de la pérdida del motor12 ImNom not found Identificación de la corriente de magnetización nominal fallada13 ImNom not found Identificación de la máxima corriente de magnetización fallada14 RrV low lim Exceso del límite de voltaje durante la medida para el cálculo de la resistencia del
rotor del motor15 RrV high lim Exceso del límite de voltaje durante la medida para el cálculo de la resistencia del
rotor del motor16 Rr high lim Fallo en el cálculo de la resistencia del rotor del motor17 Rr low lim Fallo en el cálculo de la resistencia del rotor del motor18 AI too high El valor de la entrada analógica es demasiado alto para la autocalibración a gran
escala19 AI too low El valor de la entrada analógica es demasiado bajo para la autocalibración a gran
escala20 Rr2 high lim Fallo en el cálculo de la resistencia del rotor del motor21 Rr2 low lim Fallo en el cálculo de la resistencia del rotor del motor22 Drive disabled La habilitación de la permisiva (12 términos) era inferior cuando se intentó iniciar el
procedimiento de regulación automática23 Rr timeout Se ha producido timeout durante la medida para el cálculo de la resistencia del
rotor del motor24 Rr2 timeout Se ha producido timeout durante la medida para el cálculo de la resistencia del
rotor del motor25 LsS timeout Se ha producido timeout durante la medida para el cálculo de la inductancia de la
pérdida del motor26 Drive enabled El drive ya estaba habilitado cuando se intentó iniciar el procedimiento de regulación
automática32 Calc error Se ha producido un error al procesar la información de la medida33 Config error<errcode> Se ha producido el error Configurator especificado durante la configuración de la
base de datos basada en la información de la regulación automática35 Cmd not supported En el estado actual el comando no es compatible

214 • Capítulo 11 – Directiva de la EMC ARTDriveL Manual de instrucciones
Capítulo 11 – Directiva de la EMC
Directiva de la EMC (Compatibilidad electromagnética)Los posibles campos de validez de la directiva de la EMC (89/336) aplicada a los PDS“Marca CE” resumen la presunción de acuerdo con los Requisitos esenciales de la directiva dela EMC, que están formulados en la Declaración de la CE los números de las normas deconformidad [.] referentes al documento de la Comisión Europea “Guía para la Aplicación dela Directiva 89/336/EEC” de la edición de 1997. ISBN 92-828-0762-2
Campos de validez
-1-Producto acabado/Componente
complejodisponible para el público en general[Cláusulas: 3.7, 6.2.1, 6.2.3.1 &6.3.1]
Un PDS (o CDM/BDM) de la clase dedistribución ilimitada
-2-Producto acabado/Componente
complejosólo para ensambladores
profesionales[Cláusulas: 3.7, 6.2.1, 6.2.3.2 &6.3.2]
Un PDS (o CDM/BDM)de la clase de distribución restringidavendido para incluirse como parte de
un sistema o instalación
-3-Instalación
[Cláusula: 6.5]Se reúnen varios elementos
combinados del sistema, productosacabados o otros componentes en
un lugar proporcionado. Puedeincluir PDSs (CDM o BDM),
posiblemente de diferentes clases- Restringidas o ilimitadas
-4-Sistema
[Cláusula: 6.4]Preparado para utilizar elemento(s)
acabados. Puede incluir PDSs (CDMo BDM), posiblemente de diferentes
clases - Restringidas o ilimitadas
Descripción
Situado en el mercado como una simple unidad comercial para la distribución y el uso final.Movimiento libre basado en el acuerdo con la directiva de la EMC- Con declaración de la CE de conformidad – Con marcas de la CE- Los PDS o CDM/BDM deberían cumplir con IEC 1800-3/EN 61800-3El fabricante de los PDS (o CDM/BDM) es responsable del comportamiento de la EMC de los PDS (o CDM/BDM), bajo las condiciones especificadas. Las medidas de la EMC fuera del elemento están descritas deuna manera de comprensión fácil y de hecho un profano las podría llevar a cabo en el campo de la EMC.La responsabilidad de la EMC del ensamblador del producto final es seguir las recomendaciones y lasdirectrices del fabricante.Nota: El fabricante de los PDS (o CDM/BDM) no es el responsable del comportamiento resultante de cualquiersistema o instalación que incluya los PDS, consulte los campos de validez 3 o 4.
No está en el mercado como una simple unidad comercial para la distribución y el uso final.Pensado sólo para ensambladores profesionales que tienen un nivel de competencia técnica para instalarlocorrectamente.- Sin declaración de la CE de conformidad – Sin marcas de CE- Los PDS o CDM/BDM deberían cumplir con IEC 1800-3/EN 61800-3El fabricante de los PDS (o CDM/BDM) es responsable de la provisión de las directrices de la instalaciónque fomentará el fabricante del aparato, del sistema o la instalación para lograr la conformidad.El comportamiento de la EMC resultante es la responsabilidad del fabricante del aparato, del sistema o de lainstalación, a partir del cual puede aplicar sus propias normas.
No está previsto que se coloque en el mercado como una simple unidad funcional (sin libre movimiento).Cada sistema incluido está sujeto a las provisiones de la directiva de la EMC.- Sin declaración de la CE de conformidad – Sin marcas de CE- Para más información sobre los propios PDSs o CDM/BDMs consulte los campos de validez 1 o 2- La responsabilidad del fabricante de los PDS puede incluir delegacionesEl comportamiento de la EMC resultante es la responsabilidad del fabricante de la instalación en cooperacióncon el usuario (por ejemplo, siguiendo un plan de la EMC apropiado). Los requisitos de protección esencialesde la directiva de la EMC se aplican teniendo en cuenta los alrededores de la instalación.
Tiene una función directa para el usuario final. Situado en el mercado para la distribución de una simpleunidad funcional, o como unidades pensadas para ser conectadas conjuntamente de forma fácil.- Con declaración de la CE de conformidad – Con marcas de CE para el sistema- Para más información sobre los propios PDSs o CDM/BDMs consulte los campos de validez 1 o 2El comportamiento de la EMC resultante, bajo condiciones especificas es la responsabilidad del fabricantedel sistema utilizando un modular o un enfoque del sistema según corresponda.Nota: El fabricante del sistema no es el responsable del comportamiento resultante de cualquier instalaciónque incluya los PDS, consulte el campo de validez 3.
Ejemplos de aplicación en los diferentes campos de validez:
1 BDM para ser utilizado en cualquier sitio: (ejemplo en premisas domésticas, o BDM disponible en los distribuidores comerciales), se vendesin ningún conocimiento del comprador o de la aplicación. El fabricante es responsable de conseguir la EMC suficiente incluso por cualquiercliente o profano desconocido (encajar, activar).
2 CDM/BDM o PDS para propósitos generales: para incorporarlos en una máquina o para aplicaciones industriales. Se vende como unsubcomponente para un ensamblador profesional que lo incorpora en una máquina, en un sistema o en una instalación. Las condiciones deuso están especificadas en la documentación del fabricante. El intercambio de información técnica permite la optimización de la solución dela EMC.. (Consulte la definición de la distribución restringida).
3 Instalación: Puede consistir en diferentes unidades comerciales (PDS, mecanismos, control de procesos etc.). Las condiciones de incorporaciónpara los PDS (CDM o BDM) se especifican en el momento del pedido, y en consecuencia es posible el intercambio de información técnicaentre el proveedor y el cliente. Se debería tener en cuenta la combinación de los varios elementos en la instalación para asegurar la EMC. Lacompensación harmónica es un ejemplo claro de esto, tanto por motivos técnicos como económicos. (Por ejemplo, molino, máquina depapel, grúa, etc.)
4 Sistema: Preparado para utilizar el elemento acabado que incluye uno o más PDSs (o CDMs/BDMs); por ejemplo, equipos domésticos, airesacondicionados, herramientas de máquinas estándares, sistemas de bombeo estándares, etc.
Rela
cion
ados
con
PDS
o C
DM o
BDM
dire
ctam
ente
Rela
cion
ados
con
la a
plic
ació
n de
PDS
o C
DM o
BDM

ARTDriveL Manual de instrucciones Capítulo 12 – Índice de parámetros • 215
Capítulo 12 – Índice de parámetros
IPAs
100 p.1371002 p.1291003 p.1291004 p.1291005 p.1291006 p.1291007 p.1301011 p.1301012 p.1301015 p.129103 p.191104 p.191105 p.191106 p.191107 p.1251085 p.1571086 p.1571090 p.1561091 p.1561092 p.1561093 p.1571094 p.1571095 p.1571096 p.1571097 p.1571098 p.1571099 p.157110 p.1251101 p.1571102 p.1571103 p.1571104 p.1571105 p.1571106 p.1571107 p.157111 p.1251111 p.1571112 p.1571120 p.1561130 p.156114 p.1241140 p.1561141 p.156115 p.1251150 p.1561170 p.1561180 p.1561190 p.154
1210 p.1551220 p.1551250 p.1551260 p.1551301 p.1331350 p.1261460 p.124150 p.160151 p.160152 p.160153 p.159154 p.1591540 p.123156 p.159157 p.1591610 p.1351611 p.1351612 p.135162 p.122163 p.122164 p.1221650 p.1351670 p.123170 p.1261700 p.1361710 p.1361720 p.1361730 p.1361740 p.1361781 p.1231810 p.1551815 p.1551833 p.1481834 p.1481835 p.1481836 p.1481837 p.1481880 p.1261885 p.1291890 p.1321900 p.1331902 p.1321925 p.1311926 p.1321927 p.1321931 p.1321936 p.1341940 p.1311952 p.1331962 p.1331999 p.153
2000 p.1532005 p.1532007 p.1532013 p.1532015 p.1532021 p.1532023 p.1532031 p.1532033 p.1532039 p.1542041 p.1542044 p.1562048 p.1342049 p.1352054 p.1472063 p.1532065 p.1532075 p.1522077 p.1532100 p.1762101 p.1762102 p.1762103 p.1762104 p.1762105 p.1762106 p.1762107 p.1772108 p.1772109 p.1772110 p.1772111 p.1772112 p.1772113 p.1772114 p.1772115 p.1772116 p.1772120 p.1792121 p.1792122 p.1792123 p.1792124 p.1792125 p.1792126 p.1802127 p.1802128 p.1802129 p.1802130 p.1802131 p.1802132 p.1802133 p.1802134 p.180
2135 p.1802136 p.1802137 p.1802138 p.1802380 p.1452440 p.1542441 p.1542442 p.1542445 p.1552450 p.1542530 p.1442540 p.1452550 p.1452560 p.1452580 p.1472590 p.1472610 p.1352625 p.1472745 p.1582750 p.1582755 p.1582756 p.1582760 p.1582780 p.1282790 p.1282800 p.1282810 p.1282820 p.1282830 p.1282840 p.1282850 p.1282860 p.1282870 p.1292880 p.1292890 p.1292900 p.129300 p.1243060 p.1223070 p.1223080 p.1223090 p.1223100 p.1233110 p.1233120 p.1233130 p.1233140 p.1233180 p.1233190 p.1233200 p.1223210 p.1223222 p.123
3223 p.1233230 p.1243240 p.1243400 p.1523411 p.1523412 p.1523413 p.1523420 p.1353430 p.1353520 p.1523530 p.1523531 p.1523541 p.1523570 p.1663575 p.1663576 p.1673580 p.1663585 p.1523700 p.144, 1523701 p.144, 1523702 p.1443703 p.1443704 p.1443705 p.1443706 p.1463707 p.1463708 p.1463709 p.1463720 p.1443722 p.1443723 p.1443724 p.1453725 p.1453726 p.1453727 p.145380 p.1263900 p.1653901 p.1683902 p.1713903 p.176396 p.1824002 p.1594004 p.1604006 p.1604011 p.1694012 p.1694013 p.1694014 p.1694015 p.1694016 p.1694017 p.169

216 • Capítulo 12 – Índice de parámetros ARTDriveL Manual de instrucciones
4020 p.1704021 p.1704022 p.1704023 p.1704024 p.1704025 p.1704026 p.1704027 p.1704028 p.122, 1704030 p.1704031 p.1704032 p.1704033 p.1704034 p.1704035 p.1704036 p.1704037 p.1704038 p.1714039 p.1714040 p.1714041 p.1714045 p.1714046 p.1714047 p.1714048 p.1714049 p.1714050 p.1714051 p.1714052 p.1714053 p.1714054 p.1714055 p.1714056 p.1714057 p.122, 1714060 p.1744061 p.1744062 p.1744063 p.1744064 p.122, 1744065 p.1734066 p.1744067 p.1744068 p.1744070 p.1754071 p.1754072 p.1754073 p.1754074 p.1754075 p.1754076 p.1754077 p.1754078 p.122, 1754080 p.1744081 p.174
4082 p.1744083 p.1744084 p.1754085 p.1754086 p.1754087 p.1754090 p.1674091 p.1674092 p.1684093 p.1684100 p.1944101 p.1944102 p.1944103 p.1944104 p.1944105 p.1944106 p.1954107 p.1954108 p.1954109 p.1954110 p.1954111 p.1954112 p.1954113 p.1954114 p.1954120 p.1954121 p.1954122 p.1954123 p.1954124 p.1954129 p.1944130 p.1954131 p.1954132 p.1954133 p.1954134 p.1964135 p.1964136 p.1964137 p.1964138 p.1964139 p.1964140 p.1964141 p.1964142 p.1964143 p.1964144 p.1964145 p.1964146 p.1964147 p.1964148 p.1964149 p.1974150 p.1974151 p.1974152 p.197
4153 p.1974154 p.1974155 p.1974156 p.1974157 p.1974158 p.1974159 p.1974160 p.1974161 p.1974162 p.1974163 p.1974164 p.1974165 p.1974166 p.1974167 p.1974168 p.1974169 p.1984200 p.1874201 p.1874202 p.1894500 p.1654501 p.1654502 p.1654503 p.1654504 p.1654505 p.1724506 p.1724507 p.1724508 p.1724509 p.1724510 p.1724511 p.1724512 p.1724513 p.1724514 p.1724515 p.1724516 p.1724517 p.1724518 p.1724519 p.1724520 p.1724521 p.1724522 p.1724523 p.1724524 p.1725000 p.1615001 p.1615002 p.1615003 p.1615004 p.1615005 p.1615006 p.1615007 p.1615008 p.161
5009 p.1615010 p.1615011 p.1605012 p.1605020 p.1625021 p.1625022 p.1625023 p.1625024 p.1625025 p.1625026 p.1625027 p.1625028 p.1625029 p.1625030 p.1625031 p.1625032 p.1625040 p.1635041 p.1635042 p.1635043 p.1635044 p.1635045 p.1635046 p.1635047 p.1635048 p.1635049 p.1635050 p.1635051 p.1625052 p.1635060 p.1635061 p.1645062 p.1645063 p.1645064 p.1645065 p.1645066 p.1645067 p.1645068 p.1645069 p.1635080 p.1645081 p.1655082 p.1645083 p.1645084 p.1655085 p.1645086 p.1655087 p.1655088 p.1655089 p.164530 p.153540 p.1536010 p.1666011 p.166
6012 p.1666013 p.1666015 p.1676016 p.1676017 p.1676018 p.1676020 p.1676021 p.1676022 p.1676023 p.1676025 p.1676026 p.1676027 p.1676028 p.1676030 p.1686031 p.1686032 p.1686033 p.1686034 p.1686035 p.1686036 p.1686037 p.1686038 p.1686039 p.1686041 p.1996042 p.2006043 p.2006044 p.2006045 p.2006046 p.2006047 p.2006048 p.2006049 p.1996050 p.1996051 p.1996056 p.2016057 p.2016058 p.2016059 p.2016060 p.2016061 p.2016062 p.2016063 p.2016064 p.2006065 p.2006066 p.2006070 p.2036071 p.2036072 p.2036073 p.2036074 p.2036075 p.2036076 p.2036077 p.203

ARTDriveL Manual de instrucciones Capítulo 12 – Índice de parámetros • 217
6078 p.2036079 p.2036080 p.2036081 p.2036082 p.2046083 p.2046084 p.2046085 p.204670 p.126, 127680 p.126690 p.127700 p.1277029 p.1497030 p.1497031 p.1497032 p.1497033 p.1497034 p.1507035 p.1497036 p.1497037 p.1497038 p.1497039 p.1497040 p.1507041 p.1507045 p.1507046 p.1507050 p.1507051 p.1507053 p.1507060 p.1387061 p.1387062 p.1387063 p.1387064 p.1387065 p.1387066 p.1387067 p.1387069 p.1417070 p.1417072 p.1417073 p.1417074 p.141710 p.1277100 p.1407101 p.1407102 p.1407103 p.1407104 p.1407105 p.1407106 p.1407110 p.1387115 p.1407116 p.140
7117 p.1407118 p.1427134 p.1387135 p.1867136 p.1867137 p.1877138 p.1417141 p.1857142 p.1867143 p.1417144 p.1417147 p.1417148 p.141720 p.127730 p.127775 p.1278021 p.1498022 p.1508031 p.1498040 p.1398041 p.1398042 p.1398043 p.1398044 p.1398046 p.1398047 p.1398050 p.1398051 p.1398052 p.1408053 p.1408054 p.1408056 p.1398057 p.1408078 p.1418090 p.141810 p.1258998 p.1928999 p.1929000 p.1939001 p.1939002 p.1939003 p.1939004 p.1939005 p.1939010 p.1929011 p.1929012 p.1929013 p.1929014 p.1929015 p.1929020 p.1929021 p.1939022 p.1939023 p.193
9024 p.1939025 p.1939030 p.1939031 p.1939032 p.1939033 p.1939034 p.1939035 p.1939040 p.1889041 p.1889042 p.1899043 p.1899044 p.1899046 p.1839047 p.1839049 p.1889050 p.1829051 p.1829052 p.1839053 p.1839054 p.1849055 p.1849056 p.1849057 p.1859058 p.1859059 p.1859060 p.1849061 p.1849062 p.1849063 p.1839064 p.1839065 p.1849066 p.1849067 p.1849068 p.1869071 p.1889072 p.1239073 p.1239074 p.1879075 p.1839076 p.1829086 p.1869087 p.1859088 p.1859089 p.1859090 p.1239095 p.1239099 p.1879100 p.2019101 p.2019102 p.2019103 p.2019104 p.2029105 p.202
9106 p.2029107 p.2029108 p.2029109 p.2029110 p.2029111 p.2029112 p.2029113 p.2029114 p.2029115 p.2029116 p.2029117 p.2029118 p.2029119 p.2029120 p.2029121 p.2029122 p.2029123 p.2029124 p.2029125 p.2029126 p.2039127 p.2039128 p.2039129 p.2039130 p.2039131 p.2039204 p.1239210 p.1599211 p.1599220 p.1889221 p.188930 p.1279340 p.1779341 p.1779342 p.1789343 p.1789344 p.1789345 p.1789346 p.1789347 p.1789348 p.1789349 p.1789350 p.1789351 p.1789352 p.1789353 p.1789354 p.1799355 p.1799356 p.1799360 p.1809361 p.1809362 p.1809363 p.1809364 p.180
9365 p.1809366 p.1809367 p.1819368 p.1819369 p.1819370 p.1819371 p.1819372 p.1819373 p.1819374 p.1819375 p.1819376 p.1819377 p.1819378 p.1819405 p.1229406 p.1229410 p.1319411 p.1309412 p.1309417 p.1309419 p.1309420 p.1309421 p.1409431 p.1469432 p.1469434 p.1479435 p.1479438 p.1469439 p.1479550 p.1339551 p.1339553 p.1239554 p.1239557 p.1339600 p.1849603 p.1849604 p.1849605 p.1859606 p.1859608 p.1889610 p.1909611 p.1909612 p.1909614 p.1909615 p.1909616 p.1909630 p.1909631 p.1909632 p.1909634 p.1909635 p.1909636 p.1909640 p.1839641 p.183

218 • Capítulo 12 – Índice de parámetros ARTDriveL Manual de instrucciones
970 p.12898 p.125980 p.12899 p.125990 p.127
AAbort ? p.137ACF activity p.188Actual setup p.125Advanced Status p.123AI 1 alt sel src p.160AI 1 alt value p.161AI 1 gain tune p.161AI 1 offs tune p.161AI 1 sgn src p.160AI 1X gain tune p.164AI 1X offs tune p.164AI 1X sgn src p.163AI 2 alt sel src p.162AI 2 alt value p.162AI 2 gain tune p.162AI 2 offs tune p.162AI 2 sgn src p.162AI 2X gain tune p.165AI 2X offs tune p.165AI 2X sgn src p.164AI 3 alt sel src p.163AI 3 alt value p.163AI 3 gain tune p.163AI 3 offs tune p.163AI 3 sgn src p.162ALARM CONFIG p.182Alarm log p.125Alarm log clear? p.125Alarm status p.189Alm status cfg p.190Alm status mon p.190Alm W1 S1 p.190Alm W1 S2 p.190Alm W2 S1 p.190Alm W2 S2 p.190Alm W3 S1 p.190Alm W3 S2 p.190Ambient temp p.126An inp 1 < thr p.161An inp 1 cfg p.161An inp 1 dst p.165An inp 1 filter p.161An inp 1 gain p.161An inp 1 hi lim p.161An inp 1 low lim p.161An inp 1 mon p.161An inp 1 offset p.161
An inp 1 output p.161An inp 1 scale p.161An inp 1 src p.160An inp 1 thr p.161An inp 1 type p.161An inp 1X < thr p.164An inp 1X cfg p.163An inp 1X dst p.165An inp 1X gain p.164An inp 1X hi lim p.164An inp 1X lo lim p.164An inp 1X mon p.164An inp 1X offset p.164An inp 1X output p.164An inp 1X scale p.164An inp 1X src p.163An inp 1X thr p.164An inp 1X type p.163An inp 2 < thr p.162An inp 2 cfg p.162An inp 2 dst p.165An inp 2 filter p.162An inp 2 gain p.162An inp 2 hi lim p.162An inp 2 lo lim p.162An inp 2 mon p.162An inp 2 offset p.162An inp 2 output p.162An inp 2 scale p.162An inp 2 src p.162An inp 2 thr p.162An inp 2 type p.162An inp 2X < thr p.165An inp 2X cfg p.164An inp 2X dst p.165An inp 2X gain p.165An inp 2X hi lim p.165An inp 2X lo lim p.164An inp 2X mon p.165An inp 2X offset p.165An inp 2X output p.165An inp 2X scale p.164An inp 2X src p.164An inp 2X thr p.164An inp 2X type p.164An inp 3 < thr p.163An inp 3 cfg p.163An inp 3 dst p.165An inp 3 filter p.163An inp 3 gain p.163An inp 3 hi lim p.163An inp 3 lo lim p.163An inp 3 mon p.163An inp 3 offset p.163
An inp 3 output p.163An inp 3 scale p.163An inp 3 src p.162An inp 3 thr p.163An inp 3 type p.163An out 1 cfg p.166An out 1 hi lim p.166An out 1 lo lim p.166An out 1 mon p.166An out 1 scale p.166An out 1 sgn src p.166An out 1 src p.166An out 1X cfg p.167An out 1X hi lim p.167An out 1X lo lim p.167An out 1X mon p.167An out 1X scale p.167An out 1X src p.167An out 2 cfg p.167An out 2 hi lim p.167An out 2 lo lim p.167An out 2 mon p.167An out 2 scale p.167An out 2 sgn src p.167An out 2 src p.166An out 2X cfg p.167An out 2X hi lim p.167An out 2X lo lim p.167An out 2X mon p.167An out 2X scale p.167An out 2X src p.167An out 3X cfg p.168An out 3X hi lim p.168An out 3X lo lim p.168An out 3X mon p.168An out 3X scale p.168An out 3X src p.168An out 3X type p.168An out 4X cfg p.168An out 4X hi lim p.168An out 4X lo lim p.168An out 4X mon p.168An out 4X scale p.168An out 4X src p.168An out 4x type p.168Analog inputs p.160Analog outputs p.165Antioscill gain p.152APPL CARD CONFIG
p.194Appl card fault p.187Autotune p.128Available Outvlt p.156
BB0 W0 decomp p.179B0 W1 decomp p.180B1 W0 decomp p.179B1 W1 decomp p.180B10 W0 decomp p.180B10 W1 decomp p.181B11 W0 decomp p.180B11 W1 decomp p.181B12 W0 decomp p.180B12 W1 decomp p.181B13 W0 decomp p.180B13 W1 decomp p.181B14 W0 decomp p.180B14 W1 decomp p.181B15 W0 decomp p.180B15 W1 decomp p.181B2 W0 decomp p.179B2 W1 decomp p.180B3 W0 decomp p.180B3 W1 decomp p.180B4 W0 decomp p.180B4 W1 decomp p.181B5 W0 decomp p.180B5 W1 decomp p.181B6 W0 decomp p.180B6 W1 decomp p.181B7 W0 decomp p.180B7 W1 decomp p.181B8 W0 decomp p.180B8 W1 decomp p.181B9 W0 decomp p.180B9 W1 decomp p.181Bandwidth p.135Base values p.152, 153,
154Bits->Word p.176Bits->Word / Bits-
>Word0 monp.177
Bits->Word / Bits->Word0 src p.176
Bits->Word / Bits->Word1 monp.179
Brake close dly p.140Brake feedback p.186Brake open delay p.140Brake open src p.142BRK activity p.186BRK feedback src p.186BRK hold off p.186BRK RUN hold off p.187

ARTDriveL Manual de instrucciones Capítulo 12 – Índice de parámetros • 219
BU control p.136BU OL accum % p.123BU overload p.188BU protection p.136BU res cont pwr p.136BU res OL factor p.136BU res OL time p.136BU resistance p.136BUOL activity p.188
CCabin weight p.129Calc Inertia p.135Calc method p.134CCF activity p.187CCF restart p.187CCF restart time p.187Cmp 1 delay p.200Cmp 1 function p.200Cmp 1 inp 0 p.199Cmp 1 inp 0 src p.199Cmp 1 inp 1 p.200Cmp 1 inp 1 src p.199Cmp 1 inp 2 p.200Cmp 1 inp 2 src p.199Cmp 1 window p.200Cmp 2 delay p.201Cmp 2 function p.201Cmp 2 inp 0 p.201Cmp 2 inp 0 src p.200Cmp 2 inp 1 p.201Cmp 2 inp 1 src p.200Cmp 2 inp 2 p.201Cmp 2 inp 2 src p.200Cmp 2 inversion p.201Cmp 2 window p.201CNT activity p.186CNT feedback src p.185CNT hold off p.186Comm card fault p.187Commands p.159Commands cfg p.159Commands mon p.160Commands select p.159Commands src p.159COMMUNICATION p.191Compare 1 p.199Compare 1 cfg p.199Compare 1 mon p.200Compare 1 output p.200Compare 1 src p.199Compare 2 p.200Compare 2 cfg p.201
Compare 2 mon p.201Compare 2 output p.201Compare 2 src p.200Complete rot p.128Complete still p.128Connect p.203Connect A p.203Connect B p.203ConnectA inp 0 src p.203ConnectA inp 1 src p.203ConnectA inp 2 src p.203ConnectA inp 3 src p.203ConnectA inp 4 src p.203ConnectA inp 5 src p.203ConnectA inp 6 src p.203ConnectA inp 7 src p.203ConnectB inp 0 src p.203ConnectB inp 1 src p.203ConnectB inp 2 src p.203ConnectB inp 3 src p.203ConnectB inp 4 src p.204ConnectB inp 5 src p.204ConnectB inp 6 src p.204ConnectB inp 7 src p.204Cont close delay p.140Cont open delay p.140Contact feedback p.185Cosfi p.127Counter weight p.129CPU1 runtime p.124CPU2 runtime p.124Curr regulato p.153CurrI base value p.153CurrI gain % p.153CurrP base value p.153CurrP gain % p.153CurrReg p.128CUSTOM FUNCTIONS
p.199
DDC braking p.148DC link voltage p.123DCbrake cmd src p.121,
148DCbrake current p.148DCbrake delay p.148DCbrake duration p.148DCBrake state p.148Dead time comp p.153Dead time limit p.153Dead time slope p.153Destinations p.172
DGFC async Ch p.195DGFC config p.194DGFC enable p.194DGFC sync Ch p.194,
195, 196, 197DGFC-A Drv W0mon
p.197DGFC-A Drv W1mon
p.197DGFC-A Drv W2mon
p.197DGFC-A Drv W3mon
p.197DGFC-A Drv W4mon
p.197DGFC-A Drv W5mon
p.197DGFC-A Drv W6mon
p.197DGFC-A Drv W7mon
p.197DGFC-A Drv W8mon
p.197DGFC-A Drv W9mon
p.198DGFC-S Drv W0mon
p.195DGFC-S Drv W1mon
p.195DGFC-S Drv W2mon
p.195DGFC-S Drv W3mon
p.195DGFC-S Drv W4mon
p.195DI 0X inversion p.170DI 0X monitor p.171DI 1X inversion p.170DI 1X monitor p.171DI 2X inversion p.170DI 2X monitor p.171DI 3X inversion p.170DI 3X monitor p.171DI 4X inversion p.170DI 4X monitor p.171DI 5X inversion p.170DI 5X monitor p.171DI 6X inversion p.170DI 6X monitor p.171DI 7X inversion p.170DI 7X monitor p.171DI 8X inversion p.171DI 8X monitor p.171DI 9X inversion p.171
DI 9X monitor p.171DI 0 Enable dst p.172DI 0 Enable mon p.170DI 0X dst p.172DI 1 dst p.172DI 1 inversion p.169DI 1 monitor p.170DI 10X dst p.172DI 10X inversion p.171DI 10X monitor p.171DI 11X dst p.172DI 11X inversion p.171DI 11X monitor p.171DI 1X dst p.172DI 2 dst p.172DI 2 inversion p.169DI 2 monitor p.170DI 2X dst p.172DI 3 dst p.172DI 3 inversion p.169DI 3 monitor p.170DI 3X dst p.172DI 4 dst p.172DI 4 inversion p.169DI 4 monitor p.170DI 4X dst p.172DI 5 dst p.172DI 5 inversion p.169DI 5 monitor p.170DI 5X dst p.172DI 6 dst p.172DI 6 inversion p.169DI 6 monitor p.170DI 6X dst p.172DI 7 dst p.172DI 7 inversion p.169DI 7 monitor p.170DI 7654321E p.122, 170DI 7X dst p.172DI 8X dst p.172DI 9X dst p.172Dig Enable src p.159Dig pad 0 p.202Dig pad 1 p.202Dig pad 10 p.203Dig pad 11 p.203Dig pad 12 p.203Dig pad 13 p.203Dig pad 14 p.203Dig pad 15 p.203Dig pad 2 p.202Dig pad 3 p.202Dig pad 4 p.202Dig pad 5 p.202

220 • Capítulo 12 – Índice de parámetros ARTDriveL Manual de instrucciones
Dig pad 6 p.202Dig pad 7 p.202Dig pad 8 p.202Dig pad 9 p.202Dig StrStp src p.159Digital inputs p.169Digital outputs p.173DIX BA9876543210
p.122, 171DO p.174DO 0 inversion p.174DO 0 src p.173DO 0X inversion p.175DO 0X src p.174DO 1 inversion p.174DO 1 src p.174DO 1X inversion p.175DO 1X src p.174DO 2 inversion p.174DO 2 src p.174DO 2X inversion p.175DO 2X src p.174DO 3 inversion p.174DO 3 src p.174DO 3210 p.122DO 3X inversion p.175DO 3X src p.174DO 4X inversion p.175DO 4X src p.175DO 5X inversion p.175DO 5X src p.175DO 6X inversion p.175DO 6X src p.175DO 7X inversion p.175DO 7X src p.175DOL activity p.188Door activity p.187Door fbk src p.187Door feedback p.187Door hold off p.187Door open speed p.141Door open src p.141DOX 76543210 p.122,
175Drive cont curr p.124Drive data p.126Drive ID Status p.124Drive name p.125Drive overload p.188Drive size p.124Drive type p.124Drv DGFC-A W0mon
p.197Drv DGFC-A W0src p.195
Drv DGFC-A W1monp.197
Drv DGFC-A W1src p.195Drv DGFC-A W2mon
p.197Drv DGFC-A W2src p.195Drv DGFC-A W3mon
p.197Drv DGFC-A W3src p.195Drv DGFC-A W4mon
p.197Drv DGFC-A W4src p.196Drv DGFC-A W5mon
p.197Drv DGFC-A W5src p.196Drv DGFC-A W6mon
p.197Drv DGFC-A W6src p.196Drv DGFC-A W7mon
p.197Drv DGFC-A W7src p.196Drv DGFC-A W8mon
p.197Drv DGFC-A W8src p.196Drv DGFC-A W9mon
p.197Drv DGFC-A W9src p.196Drv DGFC-S W0mon
p.195Drv DGFC-S W0src p.194Drv DGFC-S W1mon
p.195Drv DGFC-S W1src p.194Drv DGFC-S W2mon
p.195Drv DGFC-S W2src p.194Drv DGFC-S W3mon
p.195Drv DGFC-S W3src p.194Drv DGFC-S W4mon
p.195Drv DGFC-S W4src p.194Drv OL accum % p.123Drv SBI W0 mon p.193Drv SBI W0 src p.192Drv SBI W1 mon p.193Drv SBI W1 src p.192Drv SBI W2 mon p.193Drv SBI W2 src p.192Drv SBI W3 mon p.193Drv SBI W3 src p.192Drv SBI W4 mon p.193Drv SBI W4 src p.192Drv SBI W5 mon p.193
Drv SBI W5 src p.192Drv->SBI W cfg p.192Drv->SBI W mon p.193Drv->SBI W src p.192Drv->SBI word p.192DS restart p.183DS restart time p.183Dyn vlt margin p.156
EEF activity p.184EF hold off p.184EF restart p.184EF restart time p.184EF src p.183Efficiency p.127EMF constant p.127En/Disable mode p.160Enable cmd mon p.160Enable SM mon p.122Encoders config p.131Enter setup mode p.126Exp ana inp en p.165Exp ana out en p.168Exp dig inp cfg p.170Exp dig inp en p.171Exp dig inp mon p.171Exp dig out cfg p.175Exp dig out en p.176Exp dig out mon p.175Exp dig out src p.174Exp enc cnt dir p.133Exp enc position p.123Exp enc pulses p.133Exp enc type p.132External fault p.183
F
FastStop cmd mon p.160FastStop SM mon p.122FastStop src p.159Fault rese p.182Fault reset src p.182Flux p.123Flux config p.155Flux level src p.155Flux max lim cfg p.156Flux max lim mon p.156Flux max lim src p.155Flux ref p.123Flux regulator p.153FluxReg rot p.128FluxReg still p.128
FlxI base value p.153FlxI gain % p.153FlxP base value p.153FlxP gain % p.153Frequency p.122Full scale speed p.129
GGain monitor p.157Gain transitions p.157Gearbox inertia p.130Gearbox ratio p.129Gen Hi ref p.158Gen Low ref p.158Gen output p.158Gen Period p.158GF activity p.183GF threshold p.183Ground fault p.183
HHeatsink S OT p.184HT sensor temp p.123HTS activity p.184HTS hold off p.184HTS restart p.184HTS restart time p.184Hw fault p.189Hw fault mon p.189
II/O CONFIG p.159I/O status p.122IA sensor temp p.123IAS activity p.185IAS hold off p.185IAS restart p.185IAS restar t time p.185IGBT desaturat p.183Import recipe p.137In use values p.153Index storing p.133Index storing en p.133Inertia comp p.147Inertia comp en p.147Inertia comp flt p.147Inertia comp mon p.147Inst overcurrent p.183Int Drv SBI W0 p.192Int Drv SBI W1 p.193Int Drv SBI W3 p.193Int Drv SBI W4 p.193

ARTDriveL Manual de instrucciones Capítulo 12 – Índice de parámetros • 221
Int Drv SBI W5 p.193Int DrvDGFC-A W0 p.196Int DrvDGFC-A W1 p.196Int DrvDGFC-A W2 p.196Int DrvDGFC-A W3 p.196Int DrvDGFC-A W4 p.196Int DrvDGFC-A W5 p.196Int DrvDGFC-A W6 p.196Int DrvDGFC-A W7 p.196Int DrvDGFC-A W8 p.196Int DrvDGFC-A W9 p.197Int DrvDGFC-S W0 p.194Int DrvDGFC-S W1 p.195Int DrvDGFC-S W2 p.195Int DrvDGFC-S W3 p.195Int DrvDGFC-S W4 p.195Int flx maxlim p.156Int Inertia p.147Int IS ctrl p.133Int Outvlt lim p.156Int Pre-torque p.146Int ramp ref 1 p.149Int ramp ref 2 p.149Int ramp ref 3 p.149Int speed ref 1 p.150Int speed ref 2 p.150Int torque ref 2 p.154Intake air S OT p.185Inuse flx maxlim p.156Inuse Outvlt ref p.156Inuse S I gain p.157Inuse S P gain p.157InUse SpdI gain% p.153InUse SpdP gain% p.153Inuse Tcurr lim+ p.155Inuse Tcurr lim- p.155IOC restart p.183IOC restart time p.183IS ctrl src p.133
LLanding control p.130Landing distance p.130Landing init src p.130Landing ratio p.130Landing zone p.130Last SBI error p.192Life time p.125Lift sequence p.140Load default ? p.137Load setup p.129Load weight p.129Lock flux pos p.155
LS inductance p.128
MMagn curr lim p.156Magn curr ref p.123Magn ramp time p.155Magnetiz config p.155Magnetizing curr p.123Mains voltage p.126Mask W1 S1 p.190Mask W1 S2 p.190Mask W2 S1 p.190Mask W2 S2 p.190Mask W3 S1 p.190Mask W3 S2 p.190Max linear speed p.138Measured DTL p.128, 129Measured DTS p.128, 129Measured LsSigma p.128,
129Measured Rs p.128Mechanical data p.129Mlt ramp s0 src p.141Mlt ramp sel mon p.141Mlt spd out mon p.141Mlt spd s 0 src p.141Mlt spd s 1 src p.141Mlt spd s 2 src p.141Mlt spd sel mon p.141Modbus regs mode p.191MOL activity p.188MONITOR p.122MOT activity p.184MOT hold off p.184Mot OL accum % p.123MOT restart p.184MOT restart time p.184Motor data p.126, 127Motor inertia p.130Motor OL control p.135Motor OL factor p.135Motor OL time p.135Motor OT p.184Motor overload p.188Motor pp/sens pp p.134Motor protection p.135Motoring gains p.156MR0 acc end jerk p.139MR0 acc ini jerk p.139MR0 acceleration p.139MR0 dec end jerk p.139MR0 dec ini jerk p.139MR0 deceleration p.139
MR0 end decel p.139MR1 acc end jerk p.139MR1 acc ini jerk p.139MR1 acceleration p.139MR1 dec end jerk p.140MR1 dec ini jerk p.140MR1 deceleration p.140MR1 end decel p.140Multi speed 0 p.138Multi speed 1 p.138Multi speed 2 p.138Multi speed 3 p.138Multi speed 4 p.138Multi speed 5 p.138Multi speed 6 p.138Multi speed 7 p.138
NNorm Exp enc spd p.123Norm Speed p.122Norm Std enc spd p.123
OObserver filter p.157Observer ref mon p.157OS activity p.188OS hold off p.188OS threshold p.188Out vlt ref cfg p.156Out vlt ref mon p.156Out vlt ref src p.156Output current p.122Output power p.122Output vlt ref p.156Output voltage p.122Outvlt lim src p.156OV restart p.183OV restart time p.183Overspeed p.188Overvoltage p.183
PPad 0 p.201Pad 1 p.201Pad 10 p.202Pad 11 p.202Pad 12 p.202Pad 13 p.202Pad 14 p.202Pad 15 p.202Pad 2 p.201Pad 3 p.201
Pad 4 p.202Pad 5 p.202Pad 6 p.202Pad 7 p.202Pad 8 p.202Pad 9 p.202Pad param bit p.202Pad param word p.201Pad parameters p.201Percent values p.152, 153Pole pairs p.127Pos P gain p.130Pos speed limit p.131Pre-torque p.146Pre-torque gain p.146Pre-torque src p.147Pre-torque time p.146Pre-torque type p.147Pre-trq sign src p.147Prop filter p.145Protocol type p.191Pulley diameter p.129
RRamp function p.149Ramp out enable p.149Ramp out mon p.150Ramp profile p.139Ramp ref p.122Ramp ref 1 mon p.149Ramp ref 1 src p.149Ramp ref 2 mon p.149Ramp ref 2 src p.149Ramp ref 3 mon p.149Ramp ref 3 src p.149Ramp ref cfg p.149Ramp ref inv src p.149Ramp ref mon p.149Ramp ref src p.149Ramp setpoint p.149, 150Ramp shape p.149Rated current p.127Rated frequency p.126Rated power p.127Rated speed p.127Rated voltage p.126, 127Regen gains p.157Regulation mode p.137REGULATION PARAM
p.152Regulation S OT p.185Rep/Sim enc sel p.133Rep/Sim encoder p.133

222 • Capítulo 12 – Índice de parámetros ARTDriveL Manual de instrucciones
Results p.128RG sensor temp p.123RGS activity p.185RGS hold off p.185RGS restart p.185RGS restart time p.185Rope weight p.130RS485 p.191
SS mot HPgain p.156, 157Save config ? p.137SAVE PARAMETERS
p.151, 158, 181,193, 198, 204
SBI config p.192SBI Drv W0 mon p.193SBI Drv W1 mon p.193SBI Drv W2 mon p.193SBI Drv W3 mon p.193SBI Drv W4 mon p.193SBI Drv W5 mon p.193SBI enable p.192SBI monitor p.192SBI->Drv W mon p.193SBI->Drv word p.193Seq start mode p.140Seq start sel p.140Sequencer status p.123SERVICE p.205Service factor p.135Sfbk der base p.145Sfbk der enable p.144Sfbk der filter p.145Sfbk der gain p.145SFL activity p.189SGP tran21 band p.146SGP tran21 h thr p.146SGP tran32 band p.146SGP tran32 l thr p.146Short floor spd1 p.141Short floor spd2 p.141Slave address p.191Slave res time p.191Slip comp p.152Slip comp filter p.152Slip comp mode p.152Slip I gain p.152Slip P gain p.152SlowDown dist p.140Sls SpdFbk gains p.156Smooth start spd p.138Smooth str time p.140Software status p.125
Software type p.125Software version V .
p.125Spd 0 dis dly p.160Spd 0 enable p.144Spd 0 I gain % p.144Spd 0 P gain % p.144Spd 0 ref delay p.145Spd 0 ref thr p.145Spd 0 spd delay p.145Spd 0 speed thr p.145Spd fbk loss p.189Spd ref/fbk res p.126Spd regulator p.152SpdI base value p.153SpdI1 gain % p.144, 152SpdI2 gain % p.144SpdI3 gain % p.144SpdP base value p.152SpdP1 gain % p.144, 152SpdP2 gain % p.144SpdP3 gain % p.144SpdReg gain calc p.134Speed fbk sel p.131Speed profile p.138Speed ref p.122Speed ref 1 mon p.150Speed ref 1 src p.150Speed ref 2 mon p.150Speed ref 2 src p.150Speed ref cfg p.150Speed ref mon p.150Speed reg gains p.142Speed setpoint p.150Speed threshold p.145Speedref inv src p.150Star t alt src p.140Star t cmd mon p.160Star t fwd src p.140Star t rev src p.140Star t SM mon p.122STARTUP p.126Stator resistance p.128Std dig enc mode p.132Std dig inp cfg p.169Std dig inp mon p.170Std dig out cfg p.174Std dig out mon p.174Std dig out src p.173Std enc cnt dir p.132Std enc position p.123Std enc pulses p.132Std enc supply p.132Std enc type p.131
Std sin enc mod p.123Std sin enc Vp p.132Switching freq p.126Sys time-ddmmyy p.125
TT setpoint cfg p.154T setpoint mon p.154T setpoint src p.154Tcurr lim + p.155Tcurr lim - p.155Tcurr lim sel p.154Tcurr lim state p.155Term Start src p.159Term Stop src p.159Term StrStp src p.159Test gen cfg p.158Test gen mode p.158Test gen mon p.158Test generator p.157Torque config p.154Torque constant p.127Torque curr p.123Torque curr ref p.123Torque ref p.122, 154Torque ref 2 mon p.154Torque ref 2 src p.154TRAVEL p.138Travel units sel p.129Trq curr lim cfg p.154Trq curr lim mon p.155Trq curr lim src p.154
U
Undervoltage p.182UV repetitive p.189UV restart p.182UV restart time p.182UV select src p.182UVR attempts p.189UVR delay p.189
VV ILim I gain p.152V ILim P gain p.152V reg param p.152V/f config p.135V/f frequency p.135V/f voltage p.135Vlt regulator p.153VltI base value p.154VltI gain % p.153VltP base value p.154
VltP gain % p.153Voltage boost p.152
WW0 comp out p.177W0 decomp inp p.179W0 decomp mon p.179W0 decomp src p.179W1 comp out p.179W1 decomp inp p.180W1 decomp mon p.180W1 decomp src p.180Weights p.129Word->Bits p.179Word0 B0 src p.176Word0 B1 src p.176Word0 B10 src p.177Word0 B11 src p.177Word0 B12 src p.177Word0 B13 src p.177Word0 B14 src p.177Word0 B15 src p.177Word0 B2 src p.176Word0 B3 src p.176Word0 B4 src p.176Word0 B5 src p.176Word0 B6 src p.176Word0 B7 src p.177Word0 B8 src p.177Word0 B9 src p.177Word0->Bits cfg p.179Word0->Bits mon p.179Word0->Bits src p.179Word1 B0 src p.177Word1 B1 src p.177Word1 B10 src p.178Word1 B11 src p.178Word1 B12 src p.178Word1 B13 src p.178Word1 B14 src p.179Word1 B15 src p.179Word1 B2 src p.178Word1 B3 src p.178Word1 B4 src p.178Word1 B5 src p.178Word1 B6 src p.178Word1 B7 src p.178Word1 B8 src p.178Word1 B9 src p.178Word1->Bits cfg p.180Word1->Bits mon p.180Word1->Bits src p.180


Gef
ran
wo
rld
wid
e
GEFRAN BENELUXLammerdries, 14AB-2250 OLENPh. +32 (0) 14248181Fax. +32 (0) [email protected]
GEFRAN BRASILELETROELETRÔNICAAvenida Dr. Altino Arantes,377/379 Vila Clementino04042-032 SÂO PAULO - SPPh. +55 (0) 1155851133Fax +55 (0) [email protected]
GEFRAN DEUTSCHLANDPhilipp-Reis-Straße 9a63500 SELIGENSTADTPh. +49 (0) 61828090Fax +49 (0) [email protected]
GEFRAN SUISSE SARue Fritz Courvoisier 402302 La Chaux-de-FondsPh. +41 (0) 329684955Fax +41 (0) [email protected]
GEFRAN - FRANCE4, rue Jean Desparmet - BP 823769355 LYON Cedex 08Ph. +33 (0) 478770300Fax +33 (0) [email protected]@sieifrance.fr
GEFRAN INCAutomation and Sensors8 Lowell AvenueWINCHESTER - MA 01890Toll Free 1-888-888-4474Ph. +1 (781) 7295249Fax +1 (781) [email protected]
GEFRAN INCMotion Control14201 D South Lakes DriveNC 28273 - CharlottePh. +1 704 3290200Fax +1 704 [email protected]
SIEI AREG - GERMANYZachersweg, 17D 74376 - GemmrigheimPh. +49 7143 9730Fax +49 7143 [email protected]
GEFRAN SIEI - UK Ltd.7 Pearson Road, Central ParkTELFORD, TF2 9TX Ph. +44 (0) 845 2604555Fax +44 (0) 845 [email protected]
GEFRAN SIEI - ASIABlk. 30 Loyang way 03-19 Loyang Industrial Estate 508769 SINGAPORE Ph. +65 6 8418300 Fax. +65 6 7428300 [email protected]
GEFRAN SIEI Electric Pte LtdBlock B, Gr.Flr, No.155, Fu Te Xi Yi Road,Wai Gao Qiao Trade Zone 200131 ShanghaiPh. +86 21 5866 7816Ph. +86 21 5866 [email protected]
SIEI DRIVES TECHNOLOGYNo.1265, B1, Hong De Road,Jia Ding District201821 ShanghaiPh. +86 21 69169898Fax +86 21 [email protected]
GEFRAN S.p.A.Via Sebina 7425050 Provaglio d’Iseo (BS) ITALYPh. +39 030 98881Fax +39 030 [email protected]
Drive & Motion Control UnitVia Carducci 2421040 Gerenzano [VA] ITALYPh. +39 02 967601Fax +39 02 [email protected]
Technical Assistance : [email protected]
Customer Service : [email protected]. +39 02 96760500Fax +39 02 96760278