IP1
29
UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA 2013 II EXPERIENCIA NRO. 1 APRENDIZAJE Y FAMILIARIZACION EN EL USO DE MATLAB SEÑALES CONTINUAS, DISCRETAS Y MUESTREO (INFORME PREVIO) CURSO : LABORATORIO DE TELECOMUNICACIONES 1 PROFESOR : ING. FLORES ATOCHE, BEAU NOMBRE : IPANAQUE CASQUINA, ANTHONY FRANK CODIGO : 20094145B
-
Upload
anthony-ipanaque -
Category
Documents
-
view
90 -
download
0
Transcript of IP1

UNIVERSIDAD NACIONAL DE INGENIERIA
FACULTAD DE INGENIERIA ELECTRICA Y ELECTRONICA
2013 II
EXPERIENCIA NRO. 1APRENDIZAJE Y FAMILIARIZACION EN EL USO DE MATLAB SEÑALES
CONTINUAS, DISCRETAS Y MUESTREO(INFORME PREVIO)
CURSO : LABORATORIO DE TELECOMUNICACIONES 1PROFESOR : ING. FLORES ATOCHE, BEAUNOMBRE : IPANAQUE CASQUINA, ANTHONY FRANKCODIGO : 20094145B

OBJETIVO:
Introducir al alumno en el manejo del MATLAB, aportándole los conocimientos necesarios para una mayor profundización. Asimismo revisar la representación de señales en el dominio del tiempo y de la frecuencia.
INFORME PREVIO
1. Investigar sobre señales continuas y discretas, representación y propiedades: Sinusoide, Exponencial Compleja, Gauss, Uno , Triangulo, Impulso, Rect, Sinc, Asinc, Escalon, Signo, Shah, Horquilla y Antihorquilla.
Señal Continua:
Una señal continua o señal en el tiempo-continuo es una señal que puede expresarse como una función cuyo dominio se encuentra en el conjunto de los números reales, y normalmente es el tiempo. La función del tiempo no tiene que ser necesariamente una función continua.
Ejemplo : f(t)=sen(t) , t Ԑ R.
Señal Discreta:
Una señal de tiempo discreto x(k), solamente está definida en ciertos instantes discretos de tiempo, de tal manera que entre cada instante de tiempo y el siguiente no está definida la señal. Una señal de tiempo discreto también se puede representar como una lista o secuencia de números, denotado comúnmente como x(n).
Señal continua Sinusoidal en MATLAB:
>> x = linspace(-2*pi,2*pi,32)
>>plot(x,sin(x))
-8 -6 -4 -2 0 2 4 6 8-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

Señal discreta Sinusoidal en MATLAB:
>> x = linspace(-2*pi,2*pi,64)
>>stem(x,sin(x))
-8 -6 -4 -2 0 2 4 6 8-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Función Gaussiana:
En estadística, la función gaussiana (en honor a Carl Friedrich Gauss) es una función definida por la expresión:
Donde a, b y c son constantes reales (a > 0).
Las funciones gaussianas se utilizan frecuentemente en estadística correspondiendo, en el caso
de que a sea igual a 1
c√2π , a la función de densidad de una variable
aleatoria con distribución normal de media μ=b y varianza σ2=c2.
En MATLAB:
>> x=linspace(-3,3,500)
>>plot(x,exp(-x.^2))
-3 -2 -1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1

Función Triángulo:
La función triangulo se define del a siguiente manera:
En MATLAB:
>>x=(-3:0.01:3)
>>y=tripuls(x,4)
>>plot(x,y)
-3 -2 -1 0 1 2 30
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Función Impulso:
La delta de Dirac o función delta de Dirac es una distribución o función generalizada introducida por primera vez por el físico inglés Paul Diracy, como distribución, define un funcional en forma de integral sobre un cierto espacio de funciones. Se escribe como:
Siendo δ(x) la función que vale 1 cuando x=0, y 0 en caso contrario.
En MATLAB:
>> x=(-5:0.01:5)
>>y=tripuls(t,0.000001)
>>plot(x,y)

-5 -4 -3 -2 -1 0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Función Rect:
La función rectangular (también llamada función ventana unitaria o pulso unitario) se define como:
En MATLAB:
>>x=(-5:0.01:5)
>> y=rectpuls(x,1)
>> plot(x,y,'Linewidth',1)
>> ylim([-1 2])
>> grid on
-5 -4 -3 -2 -1 0 1 2 3 4 5-1
-0.5
0
0.5
1
1.5
2
Función Sinc:
En matemática, la función sinc o seno cardinal, denotada por sinc(x), tiene dos definiciones,
la normalizada y la desnormalizada que se definen de la siguiente forma:
1. En procesamiento digital de señales y teoría de la información, la función sinc
normalizada comúnmente se define como:

2. En matemática, la histórica función sinc desnormalizada, está definida por:
En ambos casos el valor de la función tiene una singularidad evitable en cero, que generalmente
se redefine específicamente como igual a 1. La función sinc es analítica en todas partes.
La función desnormalizada es idéntica a la normalizada excepto por el factor de escala faltante
en el argumento. La función sinc corresponde a la transformada de fourier de un pulso
rectangular, y la transformada inversa de fourier de un espectro rectangular es una sinc.
En MATLAB:
>> x=(-5:0.05:5)
>>y=sinc(x)
>>plot(x,y)
-5 -4 -3 -2 -1 0 1 2 3 4 5-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Función Escalón:
La función escalón de Heaviside, también llamada función escalón unitario, debe su nombre al
matemático inglés Oliver Heaviside. Es una función discontinua cuyo valor es 0 para cualquier
argumento negativo, y 1 para cualquier argumento positivo:
En MATLAB:
>>x=(-5:0.01:5)
>>y=heaviside(x)
>>plot(x,y)

-5 -4 -3 -2 -1 0 1 2 3 4 50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Función Signo:
La función signo puede definirse de las siguientes maneras:
1. Donde su dominio de definición es R y su conjunto imagen {-1;0;1}.
2. Como la derivada de la función valor absoluto. Su dominio de definición es R - {0} y su conjunto imagen Im={-1;1}
En MATLAB:
>>x=(-5:0.01:5)
>>y=sign(x)
>>plot(x,y)
-5 -4 -3 -2 -1 0 1 2 3 4 5-1.5
-1
-0.5
0
0.5
1
1.5
Función Shah:

Funcion Horquilla y Anti-horquilla

2. Utilizando MATLAB genere tanto en tiempo continuo como en tiempo discreto señales periódicas cuadradas y triangulares, señales exponenciales, señales senoidales amortiguadas exponencialmente; Asimismo las señales del párrafo anterior.
Señal Periódica Cuadrada:
Continua:
>>x=linspace(0,100,10000)
>>y=square(2*pi*0.1*x,50)
>>plot(x,y)
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
Discreta:
>>x=linspace(0,100,200)
>>y=square(2*pi*0.1*x,50)
>>stem(x,y)
0 10 20 30 40 50 60 70 80 90 100-2
-1.5
-1
-0.5
0
0.5
1
1.5
2

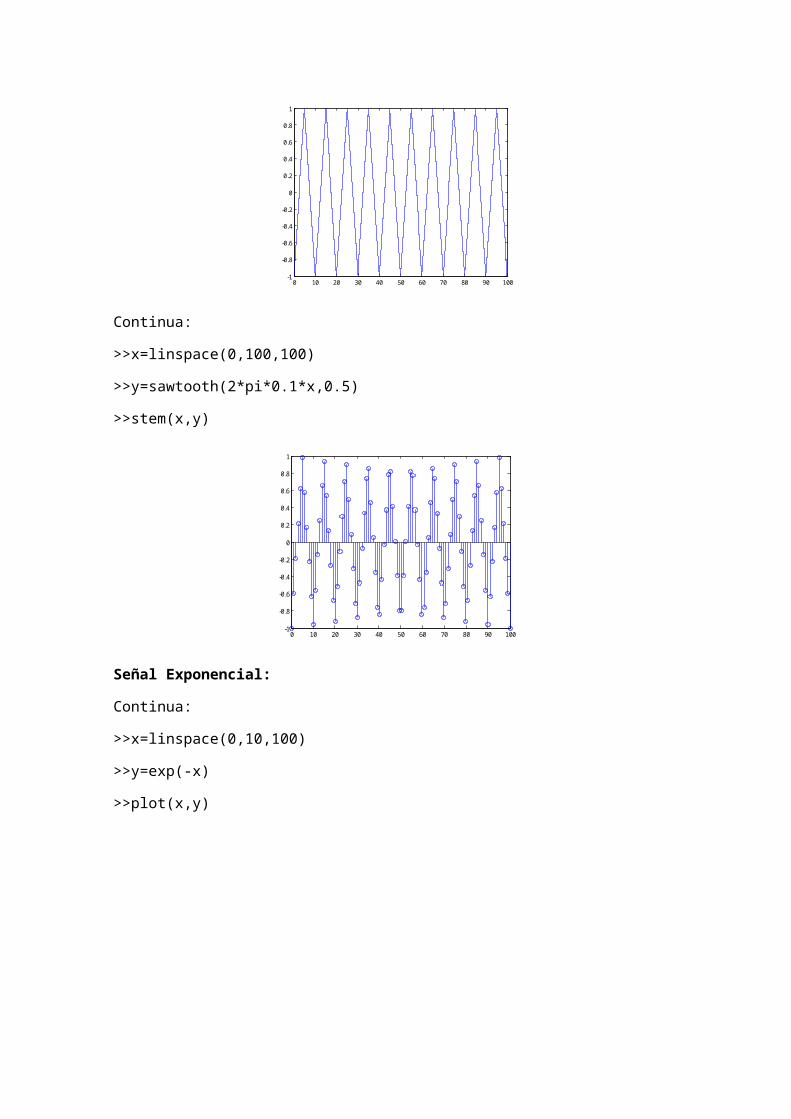
Señal Periódica Triangular:
Continua:
>>x=linspace(0,100,10000)
>>y=sawtooth(2*pi*0.1*x,0.5)
>>plot(x,y)
0 10 20 30 40 50 60 70 80 90 100-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Continua:
>>x=linspace(0,100,100)
>>y=sawtooth(2*pi*0.1*x,0.5)
>>stem(x,y)
0 10 20 30 40 50 60 70 80 90 100-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Señal Exponencial:
Continua:
>>x=linspace(0,10,100)
>>y=exp(-x)
>>plot(x,y)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Discreta:
>>x=linspace(0,10,100)
>>y=exp(-x)
>>stem(x,y)
0 1 2 3 4 5 6 7 8 9 100
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
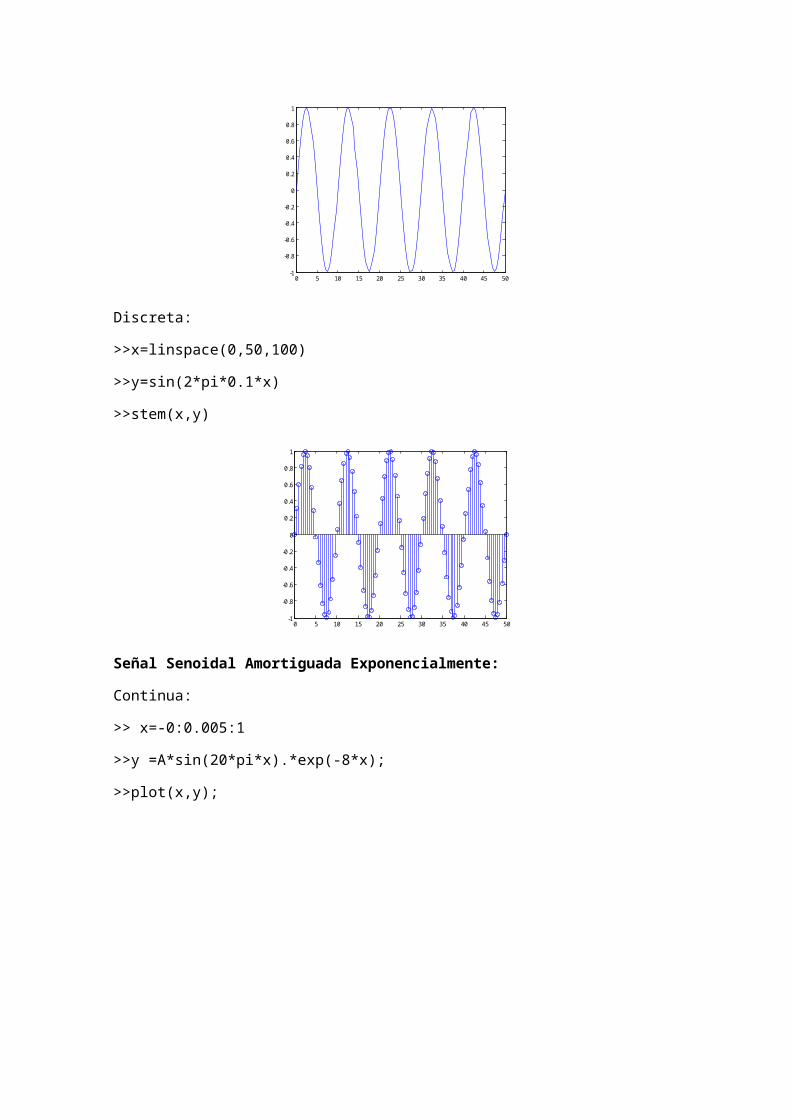
Señales Seno:
Continua:
>>x=linspace(0,50,100)
>>y=sin(2*pi*0.1*x)
>>plot(x,y)
0 5 10 15 20 25 30 35 40 45 50-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1

Discreta:
>>x=linspace(0,50,100)
>>y=sin(2*pi*0.1*x)
>>stem(x,y)
0 5 10 15 20 25 30 35 40 45 50-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Señal Senoidal Amortiguada Exponencialmente:
Continua:
>> x=-0:0.005:1
>>y =A*sin(20*pi*x).*exp(-8*x);
>>plot(x,y);
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
T
nn
TT
dttmtnAT
dttmAT
dttmtfT 0
1110
10
0
1 )cos( cos1
)cos(1
)cos()(1
T
nn dttmtnsenB
T 0
111
)cos( 1
3. Desarrollo en serie de Fourier de señales continuas periódicas: Deduzca los valores de los coeficientes del desarrollo en serie de Fourier de una señal cuadrada periódica. Simular en MATLAB:
Serie de Fourier: Cualquier función del tiempo f(t), real, periódica de período T o frecuencia 1
= 2 / T, continua, puede ser expandida en una serie infinita de senos y cosenos de frecuencias n múltiplos de 1 , es decir, n = n 1, con n=1,2,…,. En forma de ecuación tenemos que:
Construcción: Para obtener A0 calculamos el promedio temporal de f(t), sustituyendo la anterior serie en la integral del promedio y tomando en cuenta que el promedio temporal de los senos y cosenos son cero. El valor de t0 normalmente es cero pero más adelante nos convendrá tomarlo como – T/2.
Para calcular los coeficientes Am con m=1,2,…,, calcularemos el promedio de una nueva función f(t) cos( m 1 t):
La primera integral del lado derecho es cero porque es el promedio de un coseno.
Para las siguientes dos podemos considerar que los senos y cosenos son buena gente y permiten intercambiar los signos de sumatoria e integral sin mayores traumas.
Entonces calculemos primero la última integral usando que el producto sen * cos se puede escribir como [sen(+)+sen(-)]/2, resultando así dos promedios que se anulan en un período, para todo valor de y , es decir para todo valor de n y m, y así ningún Bm saldrá en el resultado.
Para calcular la segunda integral usamos que el producto cos * cos se puede escribir como [cos(+)+cos(-)]/2, resultando así dos promedios que se anulan en un período, para todo

valor de y , es decir para todo valor de n y m, excepto para el caso n=m que solo se anula el promedio de cos(+), porque cos(-)= cos(0)=1, cuyo promedio es 1.
En resumen, solamente quedará el valor Am/2, o cambiando la letra del índice:
Similarmente obtenemos:
El gráfico de A n y B n en función de n ( o de n) se conoce como el espectro de frecuencias de la función periódica f(t).
Note que la distancia entre dos frecuencias consecutivas es:
= (n+1) 1 – n 1 = 1 = 2 / T.
Serie de Fourier Compleja: Es posible modificar la ecuación de la Serie de Fourier para que la función f(t), real, quede en términos de exponenciales complejas, usando para ello la fórmula de Euler- De Moivre:
e jθ=cosθ+ j senθ
Para ello escribamos la serie de la siguiente manera:
Donde se cumplen las relaciones: A n = C n cos n,
B n = - C n sen n;
o:
la cual podemos escribir como:
finalmente, usando un solo signo de sumatoria:
donde:

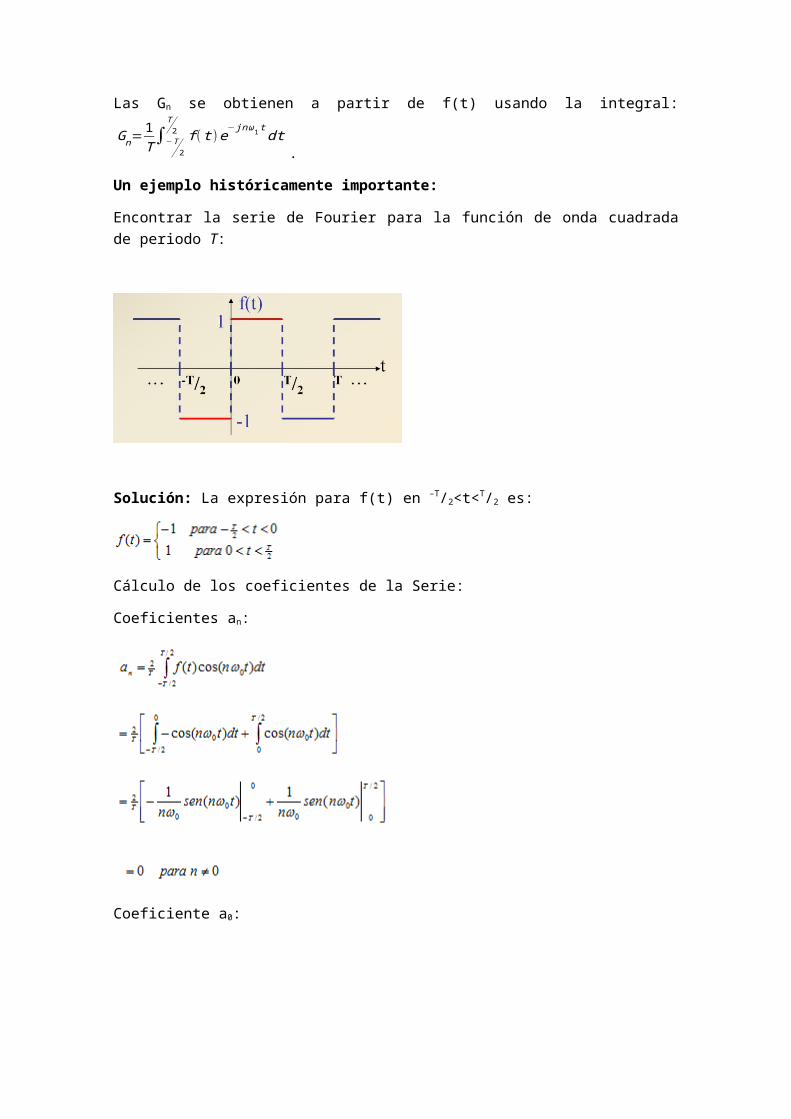
Las Gn se obtienen a partir de f(t) usando la integral: Gn=
1T−T
2
T2 f ( t )e
− jnω1 tdt.
Un ejemplo históricamente importante:
Encontrar la serie de Fourier para la función de onda cuadrada de periodo T:
Solución: La expresión para f(t) en –T/2<t<T/2 es:
Cálculo de los coeficientes de la Serie:
Coeficientes an:
Coeficiente a0:

Coeficientes bn:
Finalmente la Serie de Fourier queda como :
En la siguiente figura se muestran: la componente fundamental y los armónicos 3, 5 y 7 así como la suma parcial de estos primeros cuatro términos de la serie para w0=p, es decir, T=2:
En MATLAB:
syms t nA=[-1 0 1];f=[-1 1]; f=sym(f);T=max(A) - min(A);wo=2*pi/T; Ao=0;for i=1:length(f) Ao=Ao + int(f(i),'t',A(i),A(i+1));endAo=(Ao/T); An=0;for i=1:length(f) An=An + int(f(i)*cos(n*wo*t),'t',A(i),A(i+1));endAn=(2*An/T); Bn=0;for i=1:length(f) Bn=Bn + int(f(i)*sin(n*wo*t),'t',A(i),A(i+1));endBn=(2*Bn/T); disp('Ao')pretty(Ao)disp('An')pretty(An)disp('Bn')pretty(Bn)

4. Transformada de Fourier de señales continuas. Propiedades: Hallar F(w)para un solo pulso Rectangular y simularlo:
Transformada de Fourier:
Sea f una función Lebesgue integrable:
La transformada de Fourier de f es la función
Esta integral tiene sentido, pues el integrando es una función integrable. Una estimativa simple demuestra que la transformada de Fourier F(f) es una función acotada. Además por medio del teorema de convergencia dominada puede demostrarse que F(f) es continua.
La transformada de Fourier inversa de una función integrable f está definida por:
Nótese que la única diferencia entre la transformada de Fourier y la transformada de Fourier inversa es el signo negativo en el exponente del integrando. El teorema de inversión de Fourier formulado abajo justifica el nombre de transformada de Fourier inversa dado a esta transformada. El signo negativo en el exponente del integrado indica la traspolación de complementos yuxtapuestos. Estos complementos pueden ser analizados a través de la aplicación de la Varianza para cada función.
Propiedades básicas:
La transformada de Fourier es una aplicación lineal:
Valen las siguientes propiedades para una función absolutamente integrable f:
Cambio de escala:
Traslación:
Traslación en la variable transformada:
Transformada de la derivada: Si f y su derivada son integrables,

Derivada de la transformada: Si f y t → f(t) son integrables, la transformada de Fourier F(f) es diferenciable
Estas identidades se demuestran por un cambio de variables o integración por partes.
En lo que sigue, definimos la convolución de dos funciones f, g en la recta se define de la manera siguiente:
Nuevamente la presencia del factor delante de la integral simplifica el enunciado de los resultados como el que sigue: Si f y g son funciones absolutamente integrables, la convolución también es integrable, y vale la igualdad:
También puede enunciarse un teorema análogo para la convolución en la variable transformada,
pero este exige cierto cuidado con el dominio de definición de la transformada de Fourier.
Transformada de Fourier de un pulso rectangular:

En MATLAB:
x=-5:0.01:5;y=rectpuls(x,1);fs=20;g=fft(y);g2=(1/fs).*abs(fftshift(g));N = length(g2);ff = -fs/2 : fs/N : fs/2 - fs/N;plot(ff,g2);
-10 -8 -6 -4 -2 0 2 4 6 8 100
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5
5. Transformada de Fourier de secuencias Discretas. Transformada Discreta de Fourier de secuencias discretas. Propiedades:
Transformada de Fourier Discreta:
La secuencia de N números complejos x0, ..., xN−1 se transforma en la secuencia de N números complejos X0, ..., XN−1 mediante la DFT con la fórmula:
donde i es la unidad imaginaria y es la N-ésima raíz de la unidad. (Esta expresión se puede escribir también en términos de una matriz DFT; cuando se escala de forma apropiada se convierte en una matriz unitaria y Xk puede entonces ser interpretado como los coeficientes de x en una base ortonormal.)
La transformada se denota a veces por el símbolo , igual que en o o .
La transformada inversa de Fourier discreta (IDFT) viene dada por
Una descripción simple de estas ecuaciones es que los números complejos X k representan la amplitud y fase de diferentes componentes sinusoidales de la señal de entrada . La DFT calcula X k a partir de , mientras que la IDFT muestra cómo calcular como la suma de

componentes sinusoidales con una frecuencia de kN ciclos por muestra.
Escribiendo las ecuaciones de este modo, estamos haciendo un uso extensivo de la fórmula de Euler para expresar sinusoides en términos de exponentes complejas, lo cual es mucho más sencillo de manipular. Del mismo modo, escribiendo X k en forma polar, obtenemos una
sinudoide de amplitud AkN
y fase ФK
N a partir del módulo y argumento complejos de X k,
respectivamente:
donde atan2 es la forma bi-argumental de la función arcotangente. Nótese que el factor de normalización que multiplica a la DFT y la IDFT (que son 1 y 1/N) y los signos de los exponentes se colocan meramente por convenio, y varían dependiendo de la aplicación. El único requisito para este convenio es que la DFT y la IDFT tengan exponentes de signo opuesto y que el
producto de sus factores de normalización sea 1/N. Una normalización de 1
√N para ambas
DFT y IDFT hace las transformadas unitarias, lo cual tiene ciertas ventajas teóricas, pero suele ser más práctico a la hora de efectuar operaciones numéricas con el ordenador efectuar el escalado de una sola vez (y un escalado unitario suele ser conveniente en otras ocasiones).
(El convenio del signo negativo en el exponente suele ser adecuado porque significa que X k es
la amplitud de una "frecuencia positiva" 2πkN
. De forma equivalente, la DFT se suele
considerar como un filtro adaptado: cuando se busca una frecuencia de +1, se correla la señal de entrada con una frecuencia de −1.)

6. Conceptos de Muestreo. El teorema de muestreo. Espectro de la Señal Muestreada. Muestreo no ideal. Filtros de Reconstrucción.
Si una señal contínua, S(t), tiene una banda de frecuencia tal que fm sea la mayor frecuencia comprendida dentro de dicha banda, dicha señal podrá recontruirse sin distorsión a partir de muestras de la señal tomadas a una frecuencia fs siendo fs > 2 fm.

En la figura se muestra un esquema simplificado del proceso de muestreo.
El interruptor no es del tipo mecánico, puesto que por lo general fs es de bastante valor. Suelen emplearse transistores de efecto campo como interruptores, para cumplir los requerimientos que se le exigen entre los que se encuentran:
Una elevada resistencia de aislamiento cuando los interruptores (transistores)están desconectados. Una baja resistencia si los interruptores están conectados o cerrados. Una elevada velocidad de conmutación entre los dos estados de los interruptores.En la siguiente figura se ofrece las formas de las tres señales principales:
S(t) señal a muestrear
señal muestreadora
Sd(t) señal muestreada
Desde el punto de vista de la cuantificación de la señal muestreada, lo ideal sería que el tiempo en que el interruptor está cerrado, fuese prácticamente cero, ya que de otro modo, la señal muestreada puede variar en dicho tiempo y hacer imprecisa su cuantificación.
Debe tenerse en cuenta que para la reconstrucción de la señal original, a partir de la muestreada, se emplea un filtro de paso bajo, el cual deberá tener una función de transferencia como se indica en la figura siguiente:

Obsérvese que la respuesta del filtro, debe ser plana hasta una frecuencia, como mínimo, igual a fm, para caer posteriormente de forma brusca a cero, antes de que la frecuencia alcance el valor de fs-fm.
Mediante la aplicación del Teorema del Muestreo, se pueden transmitir varias señales, por un mismo canal de comunicación. Para ello se muestrea sucesivamente varias señales S1, S2, S3,.... y las señales muestreadas se mandan por el canal de comunicación. A este sistema se le denomina "multiplexado en el tiempo"
Al otro extremo del canal habrá que separar las distintas señales muestreadas para hacerlas pasar después por el filtro paso bajo que las reconstruya
En la figura anterior el multiplexor y el demultiplexor se han representado mediante conmutadores rotativos sincronizados , los cuales, evidentemente no son adecuados, dada la gran frecuencia de giro fs, necesaria en este sistema. Para ello se emplean multiplexores y demultiplexoreselectrónicos. En este sistema de transmisión de señales es imprescindible, el perfecto sincronismo entre los dos extremos del canal.

7. Desarrollar la Practica 3 que se adjunta.
Comprobar en Simulink la generación de una señal cuadrada a partir de la expresión (5), usando fuentes de señales sinusoidales, elementos de ganancia adecuada y un mezclador.
8.