ISOPE I-06-271

of 7
-
Upload
adri-suaznabar -
Category
Documents
-
view
218 -
download
0
Transcript of ISOPE I-06-271
-
8/11/2019 ISOPE I-06-271
1/7
Dynamics of a Vertical Riser with a Subsurface Buoy
P.S.D. PereiraPetrobras R&D Center, Subsea Technology Division
Rio de Janeiro, R.J., Brazil
C.K. MorookaDept. of Petroleum Eng., Faculty of Mechanical Engineering, State University of Campinas
Campinas, S.P., Brazil
D.F. ChampiFaculty of Mechanical Engineering, State University of Campinas
Campinas, S.P., Brazil
ABSTRACT
A vertical riser sustained by a subsurface buoy is considered in the
current work. The physical riser terminates with a subsurface buoy near
the sea surface. From the buoy a flexible line is usually applied to make
the connection to a floating production facility. The present study
disregards the flexible line. Dynamic behavior of the system is
described and hydrodynamic forces due to current and waves are
evaluated. The solution in time domain is obtained and includes thetransverse motion of the system due to vortex-induced vibrations.
Discussions of systems motion are carried out in terms of riser and
buoy dynamics, for both, in-line (collinear with the external loads) and
transverse directions. The influence of buoy dimensions is also
analyzed. Comparisons with analytical solutions are carried out to
validate the solutions.
KEY WORDS:Offshore Risers; Hydrodynamics; Sea Wave; OceanCurrent; Vortex Induced Vibration.
INTRODUCTION
Nowadays, most of the petroleum discoveries in Brazil are located in
the deep and ultra-deep waters. Therefore, new concepts for offshoresystem and risers are needed to overcome the demanding challenges
presented by operations in deepwater. Many risers systems have been
presented in the literature (Serta and Roveri, 2001). Among those
systems, self standing hybrid riser system (Fisher et al, 1995; Dailey et
al, 2002) seems to be an attractive alternative. However, several
investigations are still needed for Self-Standing Hybrid Riser System
(SSHR) (Pereira et al, 2005).
Three main components compose a SSHR system: a) a long vertical to
tensioned steel pipe riser connected to a wellhead at the sea bottom, an
to a subsurface buoy near the sea surface; b) a subsurface buoy place
below the waterline, and; c) a flexible jumper. A floating productio
unit receives the upper termination of the flexible jumper and th
downward termination is connected to a gooseneck fixed to the top o
the subsurface buoy. The floatation of the subsurface buoy togethe
with the upward tension component due to flexible jumper at thconnection at the top of the buoy gives the necessary upward tension
which maintains the riser standing in the vertical configuration. Th
SSHR system is usually used to transport of oil and gas productio
from isolated petroleum well or for a set of wells linked by a manifol
at the seabed. It could be also used to export oil or gas production the
floating production unit to an offloading system.
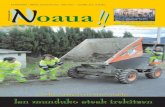
In the present paper, the dynamic behavior of the vertical riser with
subsurface buoy as a part of SSHR system is presented. Combined
riser and subsurface buoy is commonly called a tower. Figure 1 show
an illustration of the vertical riser and subsurface buoy with th
respective possible tower displacements and motion. The towe
displacements are obtained through time domain integration of system
dynamics equations. Maximum and minimum envelop fodisplacements are shown for both in-line and transverse direction
respectively. Influence of parameters such as the ocean curren
velocity, the period of the wave, riser hydrodynamics coefficients
geometry of the buoy and internal fluid has been investigated. A
simplified analytical solution for riser free vibration is initially
described and, considerations of hydrodynamic forces for in-line an
transverse directions are also described.
Proceedings of the Sixteenth (2006) International Offshore and Polar Engineering Conference
San Francisco, California, USA, May 28-June 2, 2006
Copyright 2006 by The International Society of Offshore and Polar Engineers
ISBN 1-880653-66-4 (Set); ISSN 1098-6189 (Set)
37
-
8/11/2019 ISOPE I-06-271
2/7
Fig. 1 Vertical riser with a subsurface buoy.
STATIC S OF THE VERTICAL RISER
The static configuration of a riser can be obtained from the equilibrium
of forces that act on the elements of the riser (Fig. 2). The equilibrium
of forces (Patel, 1989) including riser weight, axial force in the riser
length, the force produced by external and internal pressure, and the
external force produced by current velocity over the riser element,
result in the differential Equation (Eq.1) for riser static behavior.
dz
dxAAAF
dz
xdApApT
dz
xdEI
dz
diissnii )()( 002
2
002
2
2
2
++=+
(1)
Fig. 2 Forces in a riser element.
where, p0is the external hydrostatic pressure around the riser. p
is the internal hydrostatic pressure. A0is the cross-sectional are
of riser. Aiis the internal cross-sectional area of the riser and A
is the cross-sectional area of riser wall. i is the fluid specifiweight in the riser. 0is the specific weight of fluid surroundinthe riser (sea water) and S is the specific weight of riser wal(steel).
The analytical solution for equation (Eq. 1) can be derive
straightforwardly if the distributed effect of riser weight is neglecteand replaced by a constant axial tension along its length and the rise
diameter and the flexural stiffness (EI) and the external current loa
(Fn) of the riser are all considered constant.
VERTICAL RISER FREE VIBRATION MODES
Analytical solutions for the risers natural frequencies and mode
considering uniform riser cross-section, material, with constant axia
tension through the riser length can be obtained. In the followin
results, riser terminations fixed at the sea bottom and free to rotate a
the connection with the subsurface buoy are used.
Therefore the equation of riser behavior free to vibrate can be describe
by the following equation:
02
2
2
2
4
4
=
+
t
xA
z
xT
z
xEI (2
The analytical solution (Champi, 2005) for the Eq. 2 is as follows:
)cos()sin()cosh()sinh( 24231211 zrCzrCzrCzrCX +++= (3
where, 442
142
knn
r ++= ; 442
242
knn
r ++= ;
42*
EI
Ak
= ; EITn /2 = ;
with the coefficients C1,C2, C3and C4obtained from the consideratio
of riser end conditions.
Numerical solution has been evaluated based on previous work (Ferrar
and Bearman, 1999, Martins et al, 2003, Morooka et al, 2003). In thi
case, the riser free vibration behavior can be represented in matrix
form, as follows:
[ ]{ } [ ]{ } 0)()( =+ txKtxM && (4
where, [M] is the mass matrix. [K] is the stiffness matrix.x(t)is thharmonic motion { } { } ).cos(0 = txx and is the phase angle.
The characteristic equation becomes:
[ ] [ ]( ) [ ] [ ] 0det 22 == MKMK (5
where, is the natural frequency of the riser.
x
weightAxial force
nF
External forceon the riser
CU
nF
External force External& internalPressures
External& internal
T+dT
T
V
V + dV
dx
dz
d+
zizo FF + xixo FF +
d
r
rdFn
z
DODi
W
x
weightAxial force
nF
External forceon the riser
CU
nF
External force External& internalPressures
External& internalExternal& internalPressures
External& internal
T+dT
T
V
V + dV
dx
dz
d+
zizo FF + xixo FF +
d
r
rdFn
z
DODi
W
Ucu
y (Transverse)
Wavevelocity profile
Uc
Wave Current Wave and Current
x(In-line)x
zy
u, Uc
Flow
D
z
Fy
z
Riser Cross Section
y
x
vortex
Fy
38
-
8/11/2019 ISOPE I-06-271
3/7
IN-LINE HYDRODYNAMICS
The fluid force produced in the direction of the flow when the fluid
passes perpendicularly around the slender vertical riser with circular
transverse sectional area is usually composed by two terms (Sarpkaya
and Isaacson, 1981). The first term is due to the inertial effect produced
by acceleration of the fluid around the outer surface of the riser, and the
second one is the drag effect proportional to the fluid velocity.
Modified Morison equation has been used to compute in-line force onthe riser, as in follow:
( )xUuxUuACxuACuAF ccDDIAIx &&&&&& ++++= )( (6)
where, Fx is the in-line force per unit length, u is the wave particle
velocity, Ucis the current velocity, x& is the riser structure velocity inthe x direction, CD is the drag coefficient and CA is added mass
coefficient, respectively. Finally, AI =Do2/4, AD =Do/2, Do is the
external diameter and ois the seawater density.
In the present paper, for simplicity, Eq. 6 has been also applied to
estimate the in-line force on the subsurface buoy.
TRANSVERSE HYDRODYNAMICS
Transverse force happens when the fluid flow passes around the
vertical cylindrical riser producing variation in the pressure in the
transverse direction to the incoming flow. Pressure variation around
outer surface of the riser provokes separation of the flow and induces
vortex shedding. The presence of vortex shedding originates as an
unbalance of forces in time and produces an oscillatory transverse force
(FVIV) (Fig. 3). The consequence of this oscillatory transverse force
result in the vortex induced vibration (VIV) of the riser.
Fig. 3 Representation of the transverse VIV force at a risercross cylindrical section.
In the present study, transverse force has been estimated by semi-
empirical modeling and solutions are obtained in a 3-D fashion
dynamic behavior (Blevins, 1990, Ferrari et al, 2001) as follows:
)..2cos(..))((2
1 2 ++= tfCDUxuF StCVIV & (7
where,sf =(.St)/D, =
t
UdtU0
and Ctis the average amplitude o
transverse force.sf is the average frequency of the vortex shedding.
is the phase difference between the transverse riser response and force
St is the Strouhal number. U is the cumulative average velocity of th
oscillatory flow. U is the instantaneous oscillatory flow velocity.
DYNAMIC BEHAVIOR EQUATIONS
Equations for riser in-line and transverse dynamic behavior ar
described in this section. The riser motion for the in-line and transvers
directions in matrix form can be written as follows:
[ ]{ } [ ]{ } [ ]{ } { }xFxKxBxM =++ &&& (8
[ ]{ } [ ]{ } [ ]{ } { }yFyKyByM =++ &&& (9)
where, x is the riser motion in the in-line direction, y is for th
transverse direction which is perpendicular to the x direction. Th
direction of current and incident waves coincides with the in-line rise
direction. In Eq. 8 and Eq. 9, [ B ] is the risers structural dampin
matrix.
The hydrodynamic forces for the two directions can be described by th
following equations:
( ) xACxUuVACt
uACF IAcrDDIMx &&& ++
= (10
4444 34444 21&&&
ReactionFluid
IArDDVIVy yACyVACFF = (11
where, CMis the inertia coefficient.
Fig. 4 Relative velocity between riser structure
and fluid particle.
u,Ucu,Uc
FluidvelocityVortexformation
u,Uc
TransverseForce
ransverse direction
YVIV
F
xD xxDx&
xD xxDx&
u,Ucu,Uc
FluidvelocityVortexformation
u,Uc
TransverseForce
ransverse direction
YVIV
F
xD xxDx&
xD xxDx&
r
CU
uu &,
22 )()( yxUuV Cr && ++=
)( xUu C &+
rVy&
Transverse
In-line
r
CU
uu &,
22 )()( yxUuV Cr && ++=
)( xUu C &+
rVy&
Transverse
In-line
( ) ( )22
r yxUuV c && ++=
39
-
8/11/2019 ISOPE I-06-271
4/7
Water Depth (m) 2800.0
Riser Length (m) 2700.0
Fluid density surrounding the riser (kg/3
m ) 1025.0
Fluid density inside the riser (kg/3
m ) 970.43
Density of riser material (kg/3
m ) 7846.05
Outer Diameter (m) 0.45
Inner Diameter (m) 0.41
Young Modulus (kPa) 2.1x108
CD-CA-Ct 1.2-1.0-1.2
The interaction between riser displacements in the in-line and
transverse directions, as in Eq. 10 and Eq. 11 take into account the
relative velocity explained in Figure 4.
RESULTS
Initial calculations have been performed to verify the numerical code
developed for the presented study that has been adapted from previous
developments (Ferrari and Bearman, 1999).
Table 1 shows main dimensions for the riser considered in thecalculations. Figure 5 shows a comparison of displacements and
rotation angles along the length of the riser, with buoy andwithout buoy. The comparison was derived from static behavior
calculations. The end conditions of the system are fixed at the
bottom and free at the top. On one curve the axial tension alongthe length of the riser is taken to be constant. As expected, the
ocean currents viscous effect is larger with the buoy than
without it. It can be noted that rotation angles along the lengthof the buoy are constant indicating that it is in almost vertical.
On the curve displaying displacement without the buoy, the riser
angle at its upper most extremes follows the general rotational
behavior of the riser.
Figure 6 shows a comparison between analytical and numerical
solutions for free vibration modes for two different riser lengths, 100
meters and 1000 meters, respectively. Calculations forthe riser without
the buoy by analytical solution and by numerical one are compared.
The risers axial tension is taken to be constant in this case, as in the
previous one. Normalized amplitudes for free riser motion modes are
shown. A good agreement can be observed in the comparisons.
Following the calculations, dynamic behavior of the vertical top
tensioned riser with a subsurface buoy has been simulated in a very
deepwater condition. Table 2 shows main dimensions for the riser and
Table 3 for the buoy. The riser has been considered fixed at the bottom
end and fixed at the top to the buoy that is free to move. The considered
water depth is 2800 meters, and the subsurface buoy is submerged 100
meters below the surface.
Two different ocean current profiles have been applied: first constant
along the entire riser length extending to the buoy, and the second
constant only along the buoy length. Riser is considered fixed at the sea
bottom and at the buoy.
Table 1. Vertical riser in the initial calculations
Fig. 5 Riser displacement and rotation angle through the
riser length, with and without the subsurface buoy,
with constant riser axial tension.
Fig. 6 Riser free vibration modes.
Table 2. Main dimensions of the riser
Table 3. Main dimensions of the buoy
Length (m) 37.0
Outer diameter (m) 6.4
Young Modulus (kPa) 2.1x 1013
CD-CA-Ct 1.2-1.0-1.2
Length (m) 100
Outer Diameter (m) 0.25
Inner Diameter (m) 0.21106
Top Tension (kN) 178.0
Young Modulus (kPa) 2.1 x 108
Current Velocity (m/s) 1.0
Density of water (kg/ 3m ) 1025
Drag Coefficient (CD) 0.7
0
20
40
60
80
100
-1 0 1
1st
4th
3rd0
200
400
600
800
1000
-1 0 1
1st
2nd
3rd
Distancefromt
hesea
bottom[
m]
NumericalAnalytical
Normalized Amplitude
2nd
0
20
40
60
80
100
-1 0 1
1st
4th
3rd0
200
400
600
800
1000
-1 0 1
1st
2nd
3rd
Distancefromt
hesea
bottom[
m]
NumericalAnalytical
Normalized Amplitude
2nd
0
20
40
60
80
100
120
0 10 20
0
20
40
60
80
100
120
0.0 0.2 0.3
With buoy
No buoy With buoy
No buoy
Displacement [m] Rotation [rad]
Analytical Numerical
150
Distanc
efromt
heseabottom[
m]
150
Direction In line
0
20
40
60
80
100
120
0 10 20
0
20
40
60
80
100
120
0.0 0.2 0.3
With buoy
No buoy With buoy
No buoy
Displacement [m] Rotation [rad]
Analytical Numerical
150
Distanc
efromt
heseabottom[
m]
150
Direction In lineIn-line
40
-
8/11/2019 ISOPE I-06-271
5/7
The numerical simulation results are presented in terms of envelops of
maximum and minimum amplitudes of the riser displacement along its
length. Mean displacement is shown and dynamic motion of the riser is
assumed to happen around this position. Parametric calculations have
been performed using the geometry of the buoy such as its diameter
and length to determine their influence over the involved
hydrodynamics coefficients. Other factors influence the hydrodynamic
coefficients like internal fluid, the current velocity and the wave period.
Figure 7 shows envelop of the maximum displacement when the ocean
current velocity is varied. Ocean current is present only along thesubsurface buoy length. For the in-line direction, riser displacement due
to static current load is visible. However, none is observed for the
transverse direction. As it was expected, when the current intensity
increases, larger displacements are observed in the in-line direction due
to drag. On the other hand, transverse riser motion is in general
decreased due to viscous drag damping. However, due to larger VIV
force around the buoy, the amplitude of displacement of the system
around the buoy is increased.
Figure 8 shows riser behavior in the presence of only waves. Various
wave periods have been used. For both in-line and transverse
directions, the amplitude of the riser motions increase with larger wave
periods.
Fig. 7 Envelop of maximum amplitudes for displacement
(only current with different velocities).
Fig. 8 Envelop of maximum amplitudes for displacement
(only wave case, wave height of 4.0 m).
Figure 9 shows envelops of amplitude in the in-line and transvers
directions. The current velocity of 1.2 m/s only along the buoy length i
used with various diameters of the buoy. The riser axial tensio
increases with larger buoy diameter due to the larger buoyancy. Th
VIV force of the buoy is increased when the buoy diameter increases
In the result of Figure 9, the in-line motions are reduced and transvers
ones are increased when the buoy diameter increases.
In the same way, Figure 10 shows result for the riser in current with
constant velocity profile of 0.3 m/s along the riser and the buoy length
In this case, buoy length is varied and the same tendency stated abovis observed. In general, it could be observed that when the buoyancy o
the buoy increases through an increment of the buoy diameter o
length, riser in-line displacement and motion are diminished and th
transverse riser motion is increased.
Drag coefficient has been varied for the riser and buoy, as shown in th
results in the Figure 11. When the drag coefficient is increased, in-lin
riser displacement is increased due to drag. On the other hand
transverse riser motion is decreased due to the increase of drag which
acts to dampen this direction.
Fig. 9 Envelop of maximum amplitudes for displacement
(only current, 1.2 m/s along the buoy length).
Fig. 10 Envelop of maximum amplitudes for displacement
(only current, 0.3 m/s along the riser and buoy length).
0
400
800
1200
1600
2000
2400
2800
-2 0 2
0
400
800
1200
1600
2000
2400
2800
0 50 100 1 50Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Current velocity : 0.3 m/s 0.8 m/s 1.2 m/s 1.5 m/s
0
400
800
1200
1600
2000
2400
2800
-2 0 2
0
400
800
1200
1600
2000
2400
2800
0 50 100 1 50Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Current velocity : 0.3 m/s 0.8 m/s 1.2 m/s 1.5 m/s
0
400
800
1200
1600
2000
2400
2800
0 50 100 150
0
400
800
1200
1600
2000
2400
2800
-2.5 0 2.5Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Buoy diameter: 5.5 m 6.0 m 6.4 m 7.0 m
0
400
800
1200
1600
2000
2400
2800
0 50 100 150
0
400
800
1200
1600
2000
2400
2800
-2.5 0 2.5Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Buoy diameter: 5.5 m 6.0 m 6.4 m 7.0 m
0
400
800
1200
1600
2000
2400
2800
-0.2 0 0.2
0
400
800
1200
1600
2000
2400
2800
-0.004 0 0.004Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Period : 11.5 sec. 12.0 sec. 12.5 sec.
0
400
800
1200
1600
2000
2400
2800
-0.2 0 0.2
0
400
800
1200
1600
2000
2400
2800
-0.004 0 0.004Distancefrom
theseabottom
[m]
In line Transverse
Displacement [m]
Period : 11.5 sec. 12.0 sec. 12.5 sec.
0400
800
1200
1600
2000
2400
2800
0 50 100
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distancefrom
theseabottom
[m]
In line Transverse
37 m 45 m 55 m
Displacement [m]
Length of the buoy :
0400
800
1200
1600
2000
2400
2800
0 50 100
0400
800
1200
1600
2000
2400
2800
0 50 100
0
400
800
1200
1600
2000
2400
2800
-2 0 2
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distancefrom
theseabottom
[m]
In line Transverse
37 m 45 m 55 m
Displacement [m]
Length of the buoy :
41
-
8/11/2019 ISOPE I-06-271
6/7
Fig. 11 Envelop of maximum amplitudes for displacement
(only current, 1.2 m/s along the buoy length).
Fig. 12 Envelop of maximum amplitudes for displacement
(only current, 0.5 m/s along the riser and buoy length)
Fig. 13 Envelop of maximum amplitudes for displacement
(only current, 0.5 m/s along the riser and buoy length).
Fig. 14 Envelop of maximum amplitudes for displacement
(only current, 0.3 m/s along the buoy length).
Figure 12 shows simulation results for in-line and transverse motion othe riser and buoy where different values for added mass coefficien
have been used. No significant variations can be noted for thi
simulation for the in-line riser displacement and motion in current du
to dynamic nature of the added mass effect. For the transvers
direction, when added mass coefficient is increased smaller motion ar
observed for the riser along its length. Constant current profile of 0.
m/s is considered along the riser and buoy lengths.
In Figure 13, maximum amplitudes for displacement are shown for th
riser and buoy in current with constant current profiles of 0.5 m/s. It i
noted that if the transverse force coefficient Ctis increased, almost n
variation is noted for the in-line displacement of the riser, however, a
increase in the transverse riser motion can be observed as it wa
expected.
Figure 14 shows the effect of the presence of petroleum fluid in th
riser. In this case, the presence the internal fluid affects the effectiv
tension and in consequence the overall stiffness of the riser. With th
petroleum fluid in the riser, its displacement in the in-line direction a
the riser motion in the transverse directions appear a little bit bigger i
compared with without the internal fluid case.
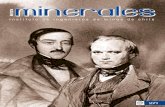
Figure 15 shows the time history from numerical simulations for th
vertical riser and subsurface buoy dynamics. In-line and transvers
motions are from the follow locations: 2700 meters (top of th
submerged buoy), 2663 meters (bottom the buoy), 1440 meters (on th
vertical riser) and 890 m (on the vertical riser). Only a current of 0.
m/s along the buoy length has been considered for this case. For the inline directions, motion is derived from the mean (static) displacemen
of the system. Larger displacements were found for the transvers
direction than in the in-line direction for this case which only consider
current. Larger motion is observed in the transverse direction close t
the buoy. For the in-line direction, displacements were bigger in th
risers mid length.
0
400
800
1200
1600
2000
2400
2800
-3 0 3
0
400
800
1200
1600
2000
2400
2800
0 50 100Distancefrom
theseabottom
[m]
Displacement [m]
In line Transverse
0.6 1.0 1.3 2.0CA :
0
400
800
1200
1600
2000
2400
2800
-3 0 3
0
400
800
1200
1600
2000
2400
2800
0 50 100Distancefrom
theseabottom
[m]
Displacement [m]
In line Transverse
0.6 1.0 1.3 2.0CA :
0
400
800
1200
1600
2000
2400
2800
0 2 4 6
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distance
from
theseabottom
[m]
In line Transverse
Displacement [m]
Without internal fluid With internal fluid
0
400
800
1200
1600
2000
2400
2800
0 2 4 6
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distance
from
theseabottom
[m]
In line Transverse
Displacement [m]
Without internal fluid With internal fluid
0
400
800
1200
1600
2000
2400
2800
0 75 150
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distance
from
theseabottom
[m]
In line Transverse
Displacement [m]
1.20.80.5 2.0:DC
0
400
800
1200
1600
2000
2400
2800
0 75 150
0
400
800
1200
1600
2000
2400
2800
-2 0 2Distance
from
theseabottom
[m]
In line Transverse
Displacement [m]
1.20.80.5 2.0:DC
0
400
800
1200
1600
2000
2400
2800
-5 0 5
0
400
800
1200
1600
2000
2400
2800
0 50 100Distancefrom
theseabottom
[m]
Displacement [m]
In line Transverse
1.2 2.50.1:tC
0
400
800
1200
1600
2000
2400
2800
-5 0 5
0
400
800
1200
1600
2000
2400
2800
0 50 100Distancefrom
theseabottom
[m]
Displacement [m]
In line Transverse
1.2 2.50.1:tC
42
-
8/11/2019 ISOPE I-06-271
7/7
(a)
(b)
Fig. 15 Time history of the amplitude of riser displacements
from numerical simulations for four different locations:
(a) In-line direction and, (b) Transverse direction.
CONCLUSIONS
Numerical simulations for the vertical riser with a subsurface buoy as a
part of a SSHR system have been carried out. Fundamental equations
for the system behavior and hydrodynamic loads have been described.
Simulation results have been compared with analytical solutions and
time domain simulation results have been shown for a very deep water
case. Parametric simulations have been undertaken. Particular attention
has been taken to VIV effects.
The hydrodynamic model used in this study for in-line and transvers
directions has shown to be practical with the coupling of the tw
directions in a 3-D fashion dynamic system behavior.
The subsurface buoy needs a special care regarding its structural an
geometric aspects, because it demonstrated great influence in th
overall vertical riser dynamics.
The influence of internal fluid flow affects its axial tension
consequentially, the stiffness of the system. This fact needs particula
attention in further studies regarding riser fatigue.
The hydrodynamic coefficients in the in-line and transverse direction
are very important for the investigations of dynamic behavior of
SSHR. Therefore, the correct determination of these values i
fundamental for numerical simulations.
ACKNOWLEDGEMENTS
The authors would like to acknowledge CNPq and PETROBRAS fo
their support for the present study.
REFERENCE
Blevins, R., 1990, Flow-Induced Vibration, 2nd Edition, KriegePublishing Company.
Champi, D.F., Morooka, C.K., Pereira, P.S.D., 2005, Numerical Stud
of Self Standing Riser System, 18th International Congress o
Mechanical Engineering (COBEM2005), Ouro Preto, Minas Gerai
Brazil.
Dailey, J.E., Healy, B.E., Zhang, J., 2002, Truss Riser Tower in Deep
Water, OTC 14190, USA, Houston, Texas.
Ferrari, J.A., Bearman, P. W., 1999, A Quasi 3-D Model for th
Hydrodynamic Loading and Response of Offshore Risers, 9t
International Conference of Offshore and Polar Engineering (ISOPE
Conference, Brest, France.
Fisher, E., Holley, P., Brashier, S., 1995, Development and Deploymen
of a Freestanding Production Riser in the Gulf of Mexico, OTC 7770
Houston, Texas, USA.
Martins, F.P., Morooka, C.K., Kubota, H.Y. Ferrari Jr., J.A. and Ribeiro
E.J.B., 2003, A Study on In-line and Transverse Dynamic Behavio
of Vertical Riser in Time Domain, 17th International Congress o
Mechanical Engineering, (COBEM2003), Sao Paulo, Brazil.
Morooka, C.K.; Kubota, H.Y. (M); Nishimoto, K.; Ferrari Jr., J.A
Ribeiro, E.J.B., 2003, Dynamic Behavior of a Vertical Productio
Riser by Quasi 3D Calculations, 22nd International Conference o
Offshore Mechanics and Arctic Engineering (OMAE), Cancun
Mexico.
Patel, M.H., 1989, Dynamics of Offshore Structures, Butterworth
England, London, Chapter 8.
Pereira, P.S.D., Maeda, K., Morooka, C.K., Tamura, K., Itoh, K., 2005
Experimental Study on a Self Standing Hybrid Riser Systemthroughout Tests on a Deep-Sea Model Basin, 24th Internationa
Conference on Offshore Mechanics and Arctic Engineering (OMAE)
Halkidiki, Greece.
Sarpkaya, T., Isaacson, M., 1981, Mechanics of Wave Forces on
Offshore Structure, 1st ed., Van Nostrand & Reinhold Company
Serta, O.B., Longo, C.E.V., Roveri, F.E., 2001, Riser Systems for Dee
and Ultra-Deepwater, OTC 13185, Houston, Texas, USA.
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
2700 m from the sea bottom
2663 m from the sea bottom
1440 m from the sea bottom
890 m from the sea bottom
Time (s)
Time (s)
Time (s)
Time (s)
Displacement
(m)
D
isplacement
(m)
Displacement
(m)
Displacement
(m)
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
-0.01
0.00
0.01
800 900 1000 1100 1200 1300
2700 m from the sea bottom
2663 m from the sea bottom
1440 m from the sea bottom
890 m from the sea bottom
Time (s)
Time (s)
Time (s)
Time (s)
Displacement
(m)
D
isplacement
(m)
Displacement
(m)
Displacement
(m)
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
2700 m from the sea bottom
2663 m from the sea bottom
1440 m from the sea bottom
890 m from the sea bottom
Displacement
(m)
Displacement
(m)
Displacement
(m)
Displacement
(m)
Time (s)
Time (s)
Time (s)
Time (s)
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
-1.80
0.00
1.80
800 900 1000 1100 1200 1300
2700 m from the sea bottom
2663 m from the sea bottom
1440 m from the sea bottom
890 m from the sea bottom
Displacement
(m)
Displacement
(m)
Displacement
(m)
Displacement
(m)
Time (s)
Time (s)
Time (s)
Time (s)
43