
LABO1
23
control avanzado PROFESOR: DANIEL ESPARTA NOMBRE: ESQUIVES TORREJON, JOSÉ GONZALO CODIGO: 20127008I CODIGO DEL CURSO: MT229 LABORATORIO Nro 1 201
-
Upload
gonzaloesquivestorrejon -
Category
Documents
-
view
215 -
download
2
description
hhg
Transcript of LABO1

control avanzado
PROFESOR: DANIEL ESPARTA
LABORATORIO Nro 1
NOMBRE: ESQUIVES TORREJON, JOSÉ GONZALO
CODIGO: 20127008I
CODIGO DEL CURSO: MT229
2015
Condiciones:
Condición de operación 1 KH kH1 kH26.9 3.83 5.81
Condición de operación 2KH KH1 KH20.7 2.54 2.03
Condición de operación 3KH KH1 KH24.2 5.25 6.15
válvula transmisor de temperatura
Kv Tv Ktt Ttt3.99 2.75 3.97 3.47
A. Diseñar un controlador PID para cada condición, el cual debe cumplir PM<20%, ess =0, tss= min.
B. Organizar una tabla con los valores obtenidos del ajuste PID.C. Diseñar un controlador con ganancia programada. Mostrar el diagrama de
bloques y el diagrama funcional del sistema con ganancia programada de temperatura en el horno.
D. Mostrar los resultados de la respuesta temporal del sistema de control con ganancia programada de temperatura en el horno para las tres condiciones de operación.
SOLUCIÓN

A.
Para la condición 1:
El diagrama de bloques es:
Probando el KPcritico obtenemos aproximadamente 0.0403, y las oscilaciones sometidas son las siguientes:
El periodo crítico es aproximadamente es 23.948segundos, por los que mis parámetros de PID será:
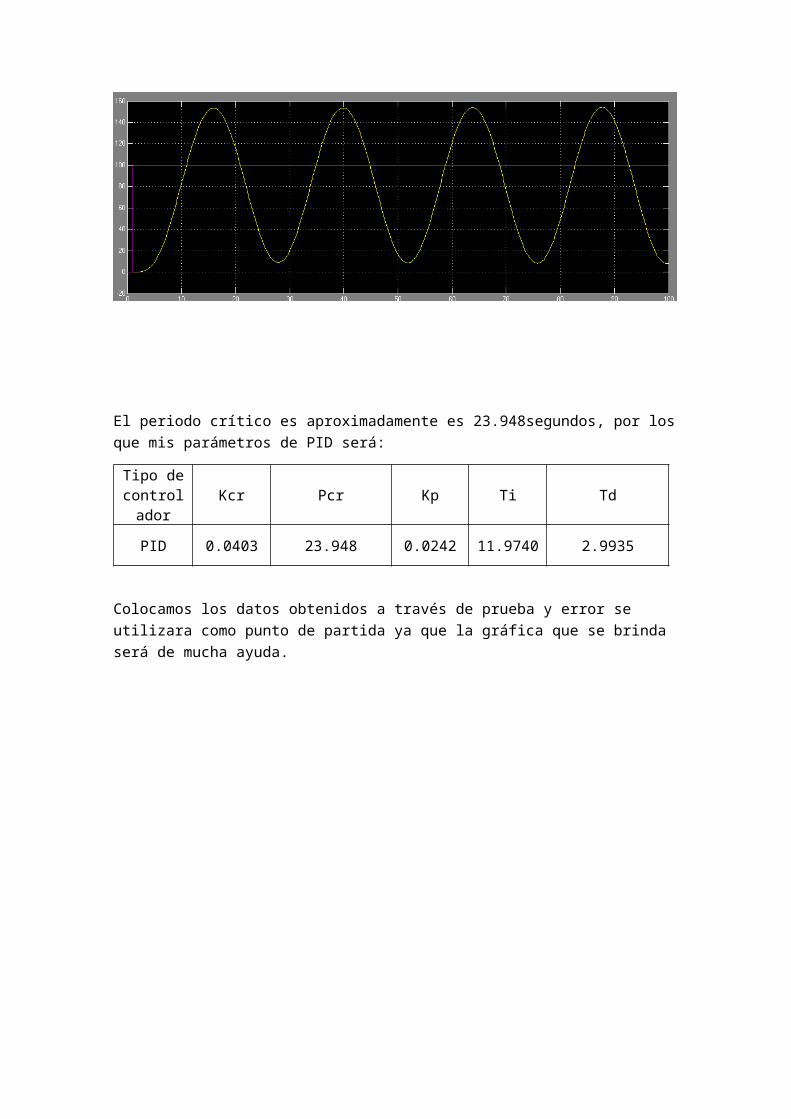
Tipo de controlado
rKcr Pcr Kp Ti Td
PID 0.0403 23.948 0.0242 11.9740 2.9935
Colocamos los datos obtenidos a través de prueba y error se utilizara como punto de partida ya que la gráfica que se brinda será de mucha ayuda.
Modificamos algunos datos para tener un mejor control:
Tipo de controlado
rKcr Pcr Kp Ti Td
PID 0.03935 23.57 0.027 11 8

Para la condición 2:
El diagrama de bloques es:

Probando el KP crítico obtenemos aproximadamente 0.3827, y las oscilaciones sometidas son las siguientes:
El periodo crítico es aproximadamente es 16.6403 segundos, por los que mis parámetros de PID será:
Tipo de controlado
rKcr Pcr Kp Ti Td
PID 0.3827 16.403 0.2296 8.3202 2.08
Colocamos los datos obtenidos a través de prueba y error se utilizara como punto de partida ya que la gráfica que se brinda será de mucha ayuda.

Ahora se realiza unos pequeños cambios a los datos que obtuvimos de base y tenemos:
Tipo de controlador Kp Ti TdPID 0.25 8 3.5

Para la condición 3:
El diagrama de bloques es:

Probando el KP crítico obtenemos aproximadamente 0.0679, y las oscilaciones sometidas son las siguientes:
El periodo crítico es aproximadamente es 26.3382 segundos, por los que mis parámetros de PID será:
Tipo de controlado
rKcr Pcr Kp Ti Td
PID 0.0679 26.3382 0.0408 13.1391 3.2923

Ahora se realiza unos pequeños cambios a los datos que obtuvimos de base y tenemos:
Tipo de controlador Kp Ti TdPID 0.24 7.3 3.5

B.
CONDICION 1
Modelo de la válvula:
Gv (S)= 3.99(2.75S+1)
Modelo de la variación de temperatura del horno:

Gth (s )= 6.9(3.83 S+1)(5.81S+1)
Modelo del sensor transmisor de temperatura:
Gtt ( s)= 3.97(3.47S+1)
Modelo de la planta:
Gp (s )= 109.29
212.34S4+230.40 S3+91.75S2+15.86 S1+1
Ahora se toma en cuenta el controlador Kp:
Glc ( s )= 109.29Kp
212.34S4+230.40 S3+91.75 S2+15.86 S1+1+109.29Kp
Aplicamos Routh
s^4 212.34 91.75 1+109.29Kp
s^3 230.40 15.86 0
s^2 77.133 1+109.29Kp
0
s^1 12.873 - 326.453Kp 0 0s^0 1+109.29Kp
Hallamos Kp crítico:
12.873 - 326.453Kp = 0 --> Kpcr = 0.039433
Entonces la ecuación característica es:
212.34S^4 +230.40S^3+91.75S^2+15.86S+5.3096
Para la frecuencia crítica se realiza el cambio s = jw e igualamos a cero.
(212.34w^4 - 91.75w^2 + 5.3096) + (15.86w -230.40w^3)j = 0
Entonces la frecuencia crítica será:
15.86wcr -230.40wcr^3 = 0

wcr = 0.262367
Con ello encontramos que el periodo crítico es:
PCR = 2ΠW cr
= 23.948077
Entonces mis parámetros de PID según este método serán:
Tipo de controlador
Kcr Pcr Kp Ti Td
PID 0.039433 23.948077 0.02365 11.97403 2.995096
Los parámetros de la primera parte para su comparación son:
Tipo de controlado
rKcr Pcr Kp Ti Td
PID 0.03935 23.57 0.02361 11.785 2.94625
Como se pudo visualizar en la primera parte no se puede controlar con las condiciones indicadas por ello lo recomendable será no usar por ello se descarta esta condición.
Para la condición 2:
Modelo de la válvula:
Gv (S)= 3.99(2.75S+1)
Modelo de la variación de temperatura del horno:
Gth (s )= 0.7(2.54 S+1)(2.03S+1)
Modelo del sensor transmisor de temperatura:
Gtt ( s)= 3.97(3.47S+1)

Modelo de la planta:
Gp (s )= 11.088
49.203S4+75.6807 S3+43.1241S2+10.79S1+1
Ahora se toma en cuenta el controlador Kp:
Glc ( s )= 11.088Kp
49.203S4+75.680 S3+43.1241S2+10.79 S1+1+11.088Kp
Aplicamos Routh:
s^4 49.203 43.1241 1+11.088Kps^3 75.68 10.79 0
s^2 35.72155 1+11.088Kp
0
s^1 309.7555-839.139Kp 0 0s^0 1+11.088Kp
Hallamos Kp crítico:
309.7555-839.139K Kpcr = 0 --> Kpcr = 0.36913
Entonces la ecuación característica es:
49.203S^4 +75.68S^3+43.1241S^2+10.79S+5.0929
Para la frecuencia crítica se realiza el cambio s = jw e igualamos a cero.
(49.203w^4 - 43.1241w^2 + 5.0929) + (10.79w -75.68w^3)j = 0
Entonces la frecuencia crítica será:
10.79wcr -75.68wcr^3 = 0
wcr = 0.3776
Con ello encontramos que el periodo crítico es:
PCR = 2ΠW cr
= 16.6397
Entonces mis parámetros de PID según este método serán:

Tipo de controlador
Kcr Pcr Kp Ti Td
PID 0.36913 16.6397 0.221478 8.3195 2.07996
Los parámetros de la primera parte para su comparación son:
Tipo de controlador Kp Ti TdPID 0.25 8 3.5
Como mis parámetros son muy similares por eso se realizara un ajuste a los datos del primer con el segundo método:
Tipo de controlador Kp Ti TdPID 0.25 8.3 3.2
Para la condición 3:
Modelo de la válvula:
Gv (S)= 3.99(2.75S+1)
Modelo de la variación de temperatura del horno:
Gth (s )= 4.2(5.25 S+1)(6.15 S+1)
Modelo del sensor transmisor de temperatura:
Gtt ( s)= 3.97(3.47S+1)
Modelo de la planta:
Gp (s )= 66.5292
308.1034S4+309.613 S3+112.738 S2+17.62 S1+1
Ahora se toma en cuenta el controlador Kp:

Glc ( s )= 66.5292Kp
308.1034 S4+309.613 S3+112.738 S2+17.62S1+1+66.529Kp
Aplicamos Routh:
s^4 308.1034 112.738 1+66.529Kps^3 309.613 17.62 0
s^2 95.2039 1+66.529Kp
0
s^1 14.3679-216.359Kp 0 0s^0 1+66.529Kp
Hallamos Kp crítico:
14.3679-216.359 Kpcr = 0 --> Kpcr = 0.0664
Entonces la ecuación característica es:
308.1034S^4 +309.613S^3+112.738S^2+17.62S+5.4175
Para la frecuencia crítica se realiza el cambio s = jw e igualamos a cero.
(308.1034w^4 - 112.738w^2 + 5.4175) + (17.62w -309.613w^3)j = 0
Entonces la frecuencia crítica será:
17.62wcr -309.613wcr^3 = 0
wcr = 0.238557
Con ello encontramos que el periodo crítico es:
PCR = 2ΠW cr
= 26.3382
Entonces mis parámetros de PID según este método serán:
Tipo de controlador
Kcr Pcr Kp Ti Td
PID 0.0664 26.3382 0.0394 13.1691 3.292275
Los parámetros de la primera parte para su comparación son:
Tipo de controlador Kp Ti TdPID 0.24 7.3 3.5

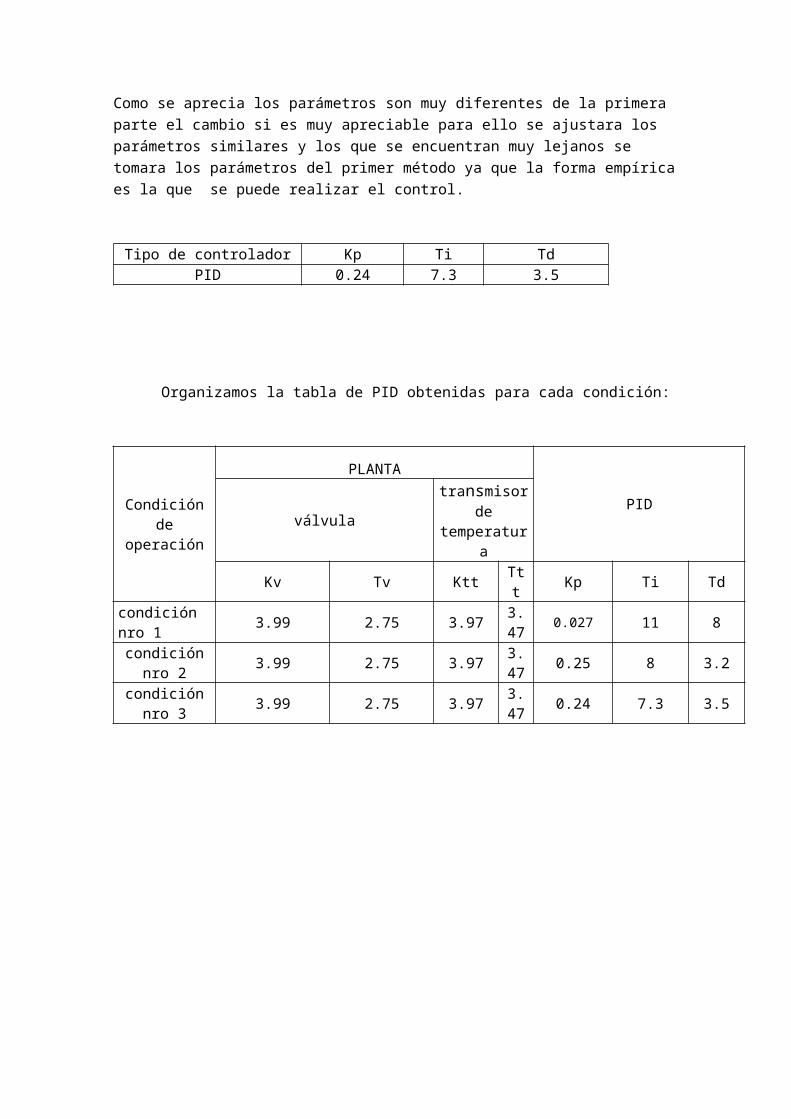
Como se aprecia los parámetros son muy diferentes de la primera parte el cambio si es muy apreciable para ello se ajustara los parámetros similares y los que se encuentran muy lejanos se tomara los parámetros del primer método ya que la forma empírica es la que se puede realizar el control.
Tipo de controlador Kp Ti TdPID 0.24 7.3 3.5
Organizamos la tabla de PID obtenidas para cada condición:
Condición de operación
PLANTA
PIDválvula transmisor de
temperatura
Kv Tv Ktt Ttt Kp Ti Td
condición nro 1 3.99 2.75 3.97 3.47 0.027 11 8
condición nro 2 3.99 2.75 3.97 3.47 0.25 8 3.2
condición nro 3 3.99 2.75 3.97 3.47 0.24 7.3 3.5

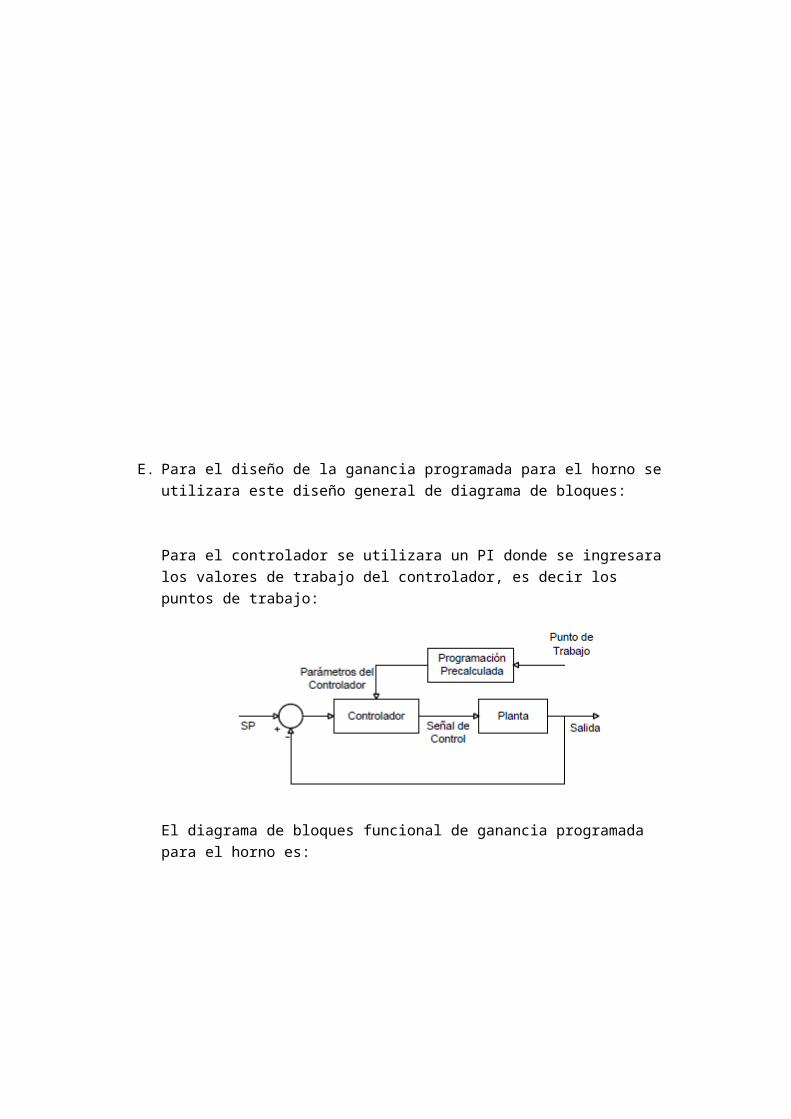
E. Para el diseño de la ganancia programada para el horno se utilizara este diseño general de diagrama de bloques:
Para el controlador se utilizara un PI donde se ingresara los valores de trabajo del controlador, es decir los puntos de trabajo:
El diagrama de bloques funcional de ganancia programada para el horno es:
La variable a utilizar es una temperatura que se ingresa y esta servirá para la manipulación de poder escoger con optimización la condición más apropiada para poder controlarla ya que se realiza una comparación de variación de salida de temperatura de cada condición de horno, una vez hecha esta comparación se busca cuál de ellos presenta menor variación de temperatura y con ello se escoge el PID a controlar.
Respuesta de la condición 1
Respuesta de la condición 2
Respuesta de la condición 3











