Maracaibo, 24 de Enero del 2001 - zulaco64.updog.co · constante según la etapa de vida útil del...
67
Maracaibo, 24 de Enero del 2001 Ciudadano. Dr. José León Morales, Jefe del departamento de Ing. Electrónica Decanato de Docencia U.N.E.T. Presente. Por medio de la presente me dirijo a Usted para presentar formalmente el anteproyecto del trabajo de grado, denominado: DESARROLLO DE UN MODELO EN LOGICA DIFUSA PARA EL CONTROL DE POZOS CON INYECCION CONTINUA DE VAPOR, para optar al titulo de Ingeniero en Electrónica, que otorga la Universidad Nacional Experimental del Táchira (U.N.E.T.). Anexo los recaudos exigidos conforme a las normas sobre esta materia. Atentamente. Tito González V - 7 895 456
Transcript of Maracaibo, 24 de Enero del 2001 - zulaco64.updog.co · constante según la etapa de vida útil del...

Maracaibo, 24 de Enero del 2001
Ciudadano.
Dr. José León Morales, Jefe del departamento de Ing. Electrónica
Decanato de Docencia U.N.E.T.
Presente.
Por medio de la presente me dirijo a Usted para presentar formalmente el anteproyecto
del trabajo de grado, denominado: DESARROLLO DE UN MODELO EN LOGICA DIFUSA
PARA EL CONTROL DE POZOS CON INYECCION CONTINUA DE VAPOR, para
optar al titulo de Ingeniero en Electrónica, que otorga la Universidad Nacional Experimental del
Táchira (U.N.E.T.).
Anexo los recaudos exigidos conforme a las normas sobre esta materia.
Atentamente.
Tito González
V - 7 895 456
Maracaibo, 24 de Enero del 2001
Ciudadano.
Dr. José León Morales, Jefe del departamento de Ing. Electrónica
Decanato de Docencia U.N.E.T.
Presente.
Yo, Ing. Carmen Galúe, titular de la cedula de identidad Nro: V - 9 752 066, en calidad
de Tutor Industrial, por medio de la presente participo a Usted que he revisado todas y cada una
de las partes que conforman el presente anteproyecto del trabajo de grado denominado:
DESARROLLO DE UN MODELO EN LOGICA DIFUSA PARA EL CONTROL DE
POZOS CON INYECCION CONTINUA DE VAPOR, encontrandolo después de una
revisión minuciosa, apto para presentarlo ante la Comisión de Trabajos de Grado.
Sin otro particular me suscribo de Usted.
Atentamente.
Carmen Galúe
V - 9 752 066

Maracaibo, 24 de Enero del 2001
Ciudadano.
Dr. José León Morales, Jefe del departamento de Ing. Electrónica
Decanato de Docencia U.N.E.T.
Presente.
Yo, Dr. Carlos A. Ramírez R., titular de la cedula de identidad Nro: V - 10 164 309, en
calidad de Tutor Académico, por medio de la presente participo a Usted que he revisado todas
y cada una de las partes que conforman el presente anteproyecto del trabajo de grado
denominado: DESARROLLO DE UN MODELO EN LOGICA DIFUSA PARA EL
CONTROL DE POZOS CON INYECCION CONTINUA DE VAPOR, encontrandolo
después de una revisión minuciosa, apto para presentarlo ante la Comisión de Trabajos de
Grado.
Sin otro particular me suscribo de Usted.
Atentamente.
Carlos A. Ramírez R
V - 10 164 309

UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA
DEPARTAMENTO DE INGENIERIA ELECTRONICA
ANTEPROYECTO DEL TRABAJO DE GRADO
DESARROLLO DE UN MODELO EN LOGICA DIFUSA
PARA EL CONTROL DE POZOS CON INYECCION
CONTINUA DE VAPOR.
TITO L. GONZALEZ F.
C.I. V - 7 895 456

INDICE
1. Antecedentes. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -1-
2. Justificación e importancia del trabajo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -2-
3. Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -8-
3.1. General . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -8-
3.2. Específicos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -8-
4. Marco Teórico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -10-
4.1. Recuperación térmica de crudos pesados . . . . . . . . . . . . . . . . . . . . . . . . -10-
4.1.1. Introducción. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -10-
4.1.1.1. Taladrado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -11-
4.1.1.2. Activación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -11-
4.1.1.3. Ingeniería de Yacimiento. . . . . . . . . . . . . . . . . . . . . . -11-
4.1.1.4. Operación. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -12-
4.1.2. Proceso de recuperación térmica. . . . . . . . . . . . . . . . . . . . . . . . -12-
4.1.3. Proceso de drenaje gravitatorio asistido por vapor (SAGD). . . -13-
4.1.3.1. Beneficios del proceso SAGD. . . . . . . . . . . . . . . . . . -15-
4.1.3.2. Limitaciones del proceso SAGD. . . . . . . . . . . . . . . . -17-
4.1.4. SAGD, Experimentos de laboratorio. . . . . . . . . . . . . . . . . . . . -19-
4.1.5. Referencias. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -26-
4.2. Introducción a la lógica difusa . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -27-
4.2.1. Breve recuento histórico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -27-
4.2.2. ¿Que es lógica difusa?. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -28-
4.2.3. El viajero sediento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -31-

4.2.4. El Control difuso. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -32-
4.2.4.1. Orígenes y objetivo. . . . . . . . . . . . . . . . . . . . . . . . . . -32-
4.2.4.2. El Control Automático. . . . . . . . . . . . . . . . . . . . . . . . -34-
4.2.4.3. El controlador difuso. . . . . . . . . . . . . . . . . . . . . . . . . -35-
4.2.4.4 El controlador tipo Mamdani. . . . . . . . . . . . . . . . . . . -38-
4.2.5. Métodos de desfusificación. . . . . . . . . . . . . . . . . . . . . . . . . . . . -46-
4.2.5.1. Centro de Area (CDA). . . . . . . . . . . . . . . . . . . . . . . . -46-
4.2.5.2. Centro de Sumas (CDS). . . . . . . . . . . . . . . . . . . . . . . -47-
4.2.5.3. Media de la Máxima (MDM). . . . . . . . . . . . . . . . . . . -48-
4.2.5.4. Método de Sugeno. . . . . . . . . . . . . . . . . . . . . . . . . . . -49-
4.2.5.5. Criterios de selección. . . . . . . . . . . . . . . . . . . . . . . . . -51-
5. Metodología a seguir . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -53-
6. Cronograma de actividades . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -55-
7. Factibilidad Técnica y Económica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -58-
8. Materiales y equipos ha utilizar . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -59-
9. Referencias Bibliográficas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . -60-

-1-
1. Antecedentes.
Después de una revisión minuciosa del sistema de fichas bibliográficas de la Universidad
Nacional Experimental del Táchira, se determina que no existe ningún trabajo de grado que verse
sobre el área de lógica difusa o sobre sistemas de inyección continua de vapor en pozos
productores de petroleo, de igual modo, después de una revisión vía Internet de las direcciones
electrónicas a continuación, no se encontró en los centros de investigación y bibliotecas de las
respectivas Universidades Nacionales y paginas Web independientes, referencia alguna a
trabajos sobre control por lógica difusa en sistemas de extracción de crudo con inyección
continua de vapor.
http://www.did.usb.ve/publicaciones/default.html (16/12/00)
http://www.bib.ucv.ve (16/12/00)
http://almamater.ing.ucv.ve/alexandr/formas/alexfrm1.htm (16/12/00)
http://www.serbi.ula.ve/ (18/12/00)
http://www.ing.ula.ve/centros/ (18/12/00)
http://www.serbi.luz.ve/catalogo (20/12/00)
http://www.auyantepui.com (20/12/00)
http://www.geocities/siliconvalley/bay/ (20/12/00)
http://www.xoom/members (21/12/00)
http://www.suncor.com/big/big_expand_firebag_pdd.html (21/12/00)
http://www.opticanada.com/public.html (21/12/00)
http://www.pe.utexas.edu/Dept/Reading/Theses/1999.html (22/12/00)
http://www2.lgc.com/solutions/sia/integration.asp (22/12/00)
http://uws47.mine.akita-u.ac.jp/sagd/index-e.html (23/12/00)
http://www.pri.ab.ca/jip4.html (23/12/00)
http://www.pri.ab.ca/jip5.html (24/12/00)

-2-
2. Justificación e importancia del trabajo.
La necesidad de incrementar la producción de crudos a corto y mediano plazo en
yacimientos altamente complejos, heterogéneos y en avanzado estado de agotamiento, así como
los continuos incrementos de los costos de producción e inversiones asociadas a los planes de
explotación ha llevado a realizar estudios de caracterización de yacimientos los cuales indican que
existe una gran cantidad de reservas no contabilizadas en los libros oficiales cuyo desarrollo
requiere de una estrategia diferente de explotación con el objeto de incrementar y optimizar las
tasas de producción y recobro final de los mismos. Esta necesidad es la principal fuente motora
en la búsqueda de nuevas tecnologías que incrementen el levantamiento de los fluidos del
yacimiento a la superficie, las cuales son y seguirán siendo un reto importante en el negocio
petrolero.
Entre estas tecnologías emergentes se encuentra el método SAGD, siglas en idioma
Ingles que indican “Steam Assisted Gravity Drainage process” o “Proceso de drenaje gravitatorio
asistido por vapor”, la cual es una técnica que logra incrementar de 50% a 60% los recobros de
petroleo pesado y extra pesado original en sitio (POES).
Esta característica le confiere un tremendo potencial económico ya que permite un
aprovechamiento a gran escala de los depósitos de crudos pesados que han sido detectados
hasta la fecha. El proceso SAGD se apoya en un proceso térmico de inyección continua de
vapor, donde la configuración convencional consiste en utilizar un par de pozos horizontales
perforados uno a arriba del otro y alineados en la vertical con una separación aproximada de 5
metros. El pozo superior cumple la función de inyectar el vapor mientras que el pozo inferior se
comporta como el pozo productor ya que generalmente suele estar en la base del yacimiento o
arena donde se aplica esta técnica para tener una mayor área de drenaje, Vease la figura 2.1.

-3-
Figura 2.1, Esquema de un pozo SAGD
El proceso SAGD comienza con una etapa de precalentamiento que consiste en la
inyección de vapor conjuntamente por el pozo Inyector y el pozo Productor, acción que permite
el establecimiento de intercambio calórico entre ambos pozos. Una vez culminado el
precalentamiento se continua con la inyección de vapor solamente en el pozo inyector a presión
constante según la etapa de vida útil del pozo SAGD.
El calentamiento del petroleo por medio del vapor ocasiona una reducción en su
viscosidad cinemática facilitándose de esta forma que el crudo fluya a través de la interfase
vapor / arena bituminosa por diferencia de densidades (Drenaje Gravitacional) hacia el pozo
productor, es decir, el movimiento del petroleo hacia el pozo productor es causado por la fuerza
de la gravedad y la geometría de una zona saturada de vapor (Cámara de vapor) de forma tal que
el crudo se desplaza casi paralelo a la interfase formada por la frontera de la cámara de vapor
que incrementa sus dimensiones de manera continua, de esta forma el petroleo y los condensados

-4-
Figura 2.2, Proceso SAGD
que se depositan en la parte más baja de la cámara de vapor son removidos continuamente a
través del pozo productor gracias a la alta presión existente en la cámara de vapor. Vease figura
2.2.
El proceso SAGD representa una alternativa valida para mejorar la eficiencia y
rendimiento en la recuperación de los crudos pesados y extra pesados. Este método obliga a
conocer la geología de los yacimientos con el fin de lograr la remoción del bitumen o crudo
pesado de una manera sistemática permitiendo obtener un mayor recobro de lo que es posible
en procesos convencionales de inyección de agua, solventes e inyección alternada de vapor
donde el petroleo se mueve fundamentalmente desplazado por los fluidos inyectados mientras que
en el proceso SAGD se trata de buscar las condiciones de equilibrio de Presión, Temperatura
y Flujo tanto en el vapor inyectado como en el crudo producido, las cuales son requeridas para
que el drenaje producido por efecto de la fuerza de gravedad sea óptimo hacia la sección
horizontal del pozo productor y por éste hacia la superficie, mediante el aseguramiento de dichas
condiciones.

-5-
Como la técnica SAGD se encuentra actualmente en etapa de proyecto bajo la
supervisión de la Gerencia de Proyectos Integrados en los campos de Tía Juana y Lagunillas, solo
se dispone de la experiencia lograda por el personal de campo a nivel de observación de
comportamiento del pozo durante los dos últimos años de actividad, es por tal motivo que se
busca implementar el control del sistema utilizando la lógica difusa. Esta, es una tecnología muy
reciente y por tanto innovadora que habilita la descripción en la operación del proceso utilizando
el lenguaje humano del día a día, es decir, la lógica difusa es un patrón natural y continuo de
aproximaciones sucesivas como el empleado por el razonamiento humano. Esta característica
permite utilizar la experiencia lograda hasta el momento por el personal de campo adscrito a la
gerencia de innovación tecnológica, ya que motivado a la misma fase experimental del proyecto
no se dispone de una base de datos con información suficiente y la cantidad existente a la fecha
aun no ha sido validada por expertos en esta técnica para su utilización por parte de otras
técnicas de la computación emergente (Redes Neuronales, Algoritmo Genético). De esta forma
se lograría transferir la experiencia obtenida en el control manual de esta clases de pozos hacia
un sistema de control automático que permita conseguir o superar la eficiencia lograda hasta el
momento.
Como una disciplina teórico - matemática, la lógica difusa reacciona constantemente
según el cambio de las variables, esto reta a la lógica tradicional ya que no se encuentra
restringida a la lógica binaria convencional de verdadero - falso. En su lugar la lógica difusa
permite las verdades parciales y las verdades multi variables.
La lógica difusa utiliza funciones de asociación para definir el grado con el cual los valores
físicos de las variables medidas del proceso serán transformadas en términos de un conjunto de
variables lingüísticas, es decir, para una variable lingüística como Presión Anular, algunos
términos típicos de la misma podrían ser: Muy Pequeña, Pequeña, Mediana, Alta, Muy Alta.

-6-
Esta disciplina es especialmente ventajosa para los problemas que no pueden ser
representados fácilmente por el modelado matemático ya que toda la información no está
disponible, está incompleta o el proceso es muy complejo. El lenguaje utilizado por el control
difuso habilita la incorporación de ambigüedades y aproximaciones de la lógica humana en
computadoras binarias. La utilización del modelado lingüístico en oposición del modelado
matemático, simplifica ampliamente el diseño de sistemas, su depuración y puesta a punto en la
aplicación final ya que en muchas situaciones del mundo real, una respuesta precisa no provee
necesariamente la solución óptima.
Para este proceso las variables medidas directamente o inferidas a nivel de pozo inyector
y productor serían: Presión , Temperatura, Flujo, Calidad, tanto a nivel de superficie como de
subsuelo. Estas variables deben ser “Fusificadas”; es decir, deben ser transformadas de valores
del mundo real a valores lingüísticos. Las encargadas de este proceso son las funciones de
asociación, las cuales calculan el grado de validez o el grado de pertenencia de cada término
lingüístico en puntos de operación específicos del proceso. La fusificación es el primer paso de
acción en un sistema difuso el cual debe ser ejecutado para cada variable de entrada. Una vez
que las funciones de asociación de todos los términos de entrada han sido definidos, el
comportamiento de control viene a ser implementado por las reglas del sistema.
Es aquí donde la ingeniería del conocimiento a través de las variables lingüísticas de los
sensores de entrada define las acciones de control a tomar, para ello se apoya en reglas
compuestas por una precondición y una consecuencia, donde, la precondición puede estar
formada por una o más variables lingüísticas enlazadas por conjunciones lingüísticas tales como
Y / O. Estas reglas también son conocidas como reglas de inferencia difusa. Una vez que todas
estas reglas han sido evaluadas, el resultado de esta acción es por supuesto difuso, en este caso
se utilizan nuevamente las funciones de asociación pero en forma inversa para trasladar este valor
difuso a un valor del mundo numérico. El valor así generado será el de la variable o variables que
-7-
deben ser manipuladas para poder efectuar la acción de control. En este caso particular
corresponderá con el nivel de apertura de las válvulas de control que regulan el flujo de vapor en
el pozo inyector y el flujo de crudo producido a nivel del pozo productor.
De lo anteriormente expuesto se puede decir que la lógica difusa es básicamente la teoría
de los conceptos graduales, una teoría donde el nivel de pertenencia de las cosas a un
determinado grupo es elástico.
Desde su inserción en el mundo académico, la lógica difusa ha crecido en una amplia
colección de conceptos y técnicas para tratar o interactuar con fenómenos complejos que no
pueden ser manejados o analizados por los métodos basados en la teoría de probabilidades, la
lógica bivalente o donde es necesario realizar consideraciones o restricciones en el modelo
matemático para poder obtener una respuesta aproximada utilizando las herramientas
anteriormente mencionadas.
Con el presente trabajo de grado se busca demostrar que la lógica difusa proporciona
resultados significativos en el área del control de procesos que no podrían ser obtenidos por los
métodos clásicos y modernos de la teoría de control. De manera especifica, se realizará esta
demostración al dar solución (A nivel de modelos) a un requerimiento de campo en el cual se
busca lograr la inyección optima de vapor en el pozo SAGD en función de la producción del
mismo según el punto operativo de su vida útil, para así optimar su taza de producción al reducir
los costos operacionales del pozo al mantenerlo sobre un punto de operación que permita lograr
el rendimiento global esperado.

-8-
3. Objetivos.
3.1. General.
Desarrollar un modelo en lógica difusa que permita el control de las tasas de producción
e inyección de vapor y en los pozos SAGD de la unidad de explotación Tierra Este Pesado,
utilizando para ello software o herramientas de control de procesos que la implementen
3.2. Específicos.
C Estudiar las ecuaciones matemáticas desarrolladas por Roger Butler que describen el
comportamiento de un pozo SAGD en un yacimiento homogéneo, las cuales serán
utilizadas para el desarrollo del modelo de simulación.
C Seleccionar el software de procesamiento matemático para implementar las ecuaciones
de Butler en un medio computacional, el cual pueda ser interrelacionado con el modelo
de controlador difuso que busca la optimización de las tazas de inyección de vapor.
C Ajustar el comportamiento del modelo matemático desarrollado en software con la
información proveniente de pozos SAGD operativos para lograr un comportamiento mas
real del modelo computacional.
C Incluir en el modelo matemático ajustado las variables operacionales que permitirán
introducir perturbaciones en el proceso, para confirmar el desempeño del controlador
difuso ante alteraciones no esperadas del pozo.

-9-
C Desarrollar las reglas de inferencia difusa a partir del comportamiento del modelo
matemático ajustado ante diferentes condiciones de las variables operacionales.
C Seleccionar el software de procesamiento matemático para implementar el controlador
difuso ha utilizar.
C Interrelacionar a nivel de software, el modelo matemático del pozo SAGD ajustado con
el controlador difuso a objeto de crear un sistema global de procesamiento.
C Observar el comportamiento del sistema global al introducir perturbaciones y alteraciones
de las variables del sistema ha objeto de producir mejoras en el controlador difuso.
C Generar las recomendaciones necesarias para implementar el controlador difuso
mejorado en la plataforma de aplicaciones o software existentes en PDVSA..
-10-
4. Marco Teórico.
4.1. Recuperación térmica de crudos pesados
4.1.1. Introducción.
El empleo de métodos de recuperación térmica en pozos horizontales, frecuentemente
requiere de una aproximación diferente y más especializada que la típicamente utilizada en
actividades de esta misma clase de pozos pero convencionales. En este sentido, es muy
importante que cada una de las disciplinas involucradas en el taladrado, completación y operación
térmica de los pozos horizontales sea mantenida dentro de las especificaciones de cada una de
ellas para obtener los mejores resultados durante el proceso de producción. Por ejemplo, el
proceso de drenaje gravitatorio asistido por vapor (SAGD, Steam Assisted Gravity Drainage
process) tiene un tremendo potencial económico ya que permite un aprovechamiento a gran
escala de los depósitos de crudos pesados y extrapesados que han sido detectados hasta la
fecha. Para asegurar el éxito del proyecto se requiere de la coordinación de estas disciplinas,
cada una de ellas debe entender que es lo que las otras disciplinas están tratando de lograr. Debe
tenerse presente que los pozos horizontales convencionales (Recuperación Primaria)
invariablemente de la técnica de producción empleada tiene sus tazas de producción más altas
cerca del inicio de su vida productiva para luego declinar con el transcurso del tiempo. Para el
caso de los pozos horizontales con recuperación térmica (SAGD) frecuentemente se requiere de
uno o dos años de calentamiento del yacimiento antes de poder alcanzar las tazas pico de
producción, así que es perfectamente normal observar tazas de producción bajas al inicio de la
vida útil del pozo sin que ello indique una operación errónea. Sin embargo, para que el proceso
sea realmente productivo es necesario que se cumplan las siguientes especificaciones.

-11-
4.1.1.1. Taladrado.
Un pozo SAGD requiere de dos pozos horizontales que sean taladrados uno sobre el
otro y alineados en la vertical, con una separación de 15' (4.57m) en su sección horizontal, esta
separación debe ser mantenida sobre distancias iguales o superiores a los 1500' (457m). Esta es
una característica propia del sistema SAGD ya que para otros procesos de recuperación de
crudo por pozo horizontal esta tolerancia vertical no tiene que ser tan ajustada.
4.1.1.2. Activación.
Para formar un pozo SAGD se requiere de una inyección uniforme de vapor a lo largo
de la sección horizontal (1500' o más). Sin una inyección de vapor uniforme, la conformación de
barrido puede verse disminuida afectandose de esta manera la viabilidad económica general del
proyecto.
4.1.1.3. Ingeniería de Yacimiento.
Para que el proceso SAGD sea efectivo se requiere de una verificación constante del
balance entre los volúmenes de vapor inyectados y los volúmenes de crudo producidos, en
cualquier otro caso, la eficiencia del proceso puede verse afectada de manera adversa. Las tazas
de inyección tienen que especificarse según las tazas de producción requeridas o características
propias del yacimiento. Los pozos verticales convencionales con proceso de recuperación
térmica no requieren de tal cuidado en el balance entre los fluidos inyectados y los fluidos
recuperados como sucede para el caso de los pozos SAGD.

-12-
4.1.1.4. Operación.
El proceso SAGD frecuentemente requiere que las presiones de inyección de vapor sean
constantemente controladas y mantenidas dentro de un rango de ±5 Psi, ya que de otro modo
un exceso de vapor sobrecalentaría el yacimiento y afectaría de manera negativa el equilibrio del
proceso, como resultado de ello es perfectamente posible que en el pozo productor solo salga
a vapor en vez de crudo.
4.1.2. Proceso de recuperación térmica.
El proceso de recuperación térmica se encuentra dividido en dos categorías. Una de estas
categorías es conocida como drenaje gravitatorio asistido por vapor (SAGD) debido a que el
mecanismo dominante del yacimiento es el drenaje por efecto de la fuerza de gravedad, la otra
categoría es conocida como proceso de desplazamiento. Ahora, desde el punto de vista práctico
según las características del yacimiento puede existir una sobreposición entre ambas categorías.
La base para el empleo de pozos horizontales con metodología de extracción SAGD en
yacimientos que contienen crudo inmóvil a las condiciones originales del yacimiento es el que
exista un alto nivel de control en la colocación del calor en el yacimiento a través del vapor. Los
pozos verticales en yacimientos con movilidad limitada de fluido, típicamente tienen que fracturar
el yacimiento para poder colocar cantidades aceptables de calor en el yacimiento, esta
fracturación del yacimiento si bien facilita la extracción del crudo, establece un proceso de
recuperación que hace difícil la predicción de la taza de recuperación y ademas dificulta el control
sobre la vida total del proyecto, como consecuencia de esto la recuperación final del crudo
remanente en el yacimiento puede ser baja. Por otra parte, los pozos horizontales permiten el
suministro de calor en direcciones altamente controlables que son frecuentemente las más idóneas
para la geología particular de estos tipos de yacimientos.

-13-
Figura 4.1, Sistema de producción SAGD.
4.1.3. Proceso de drenaje gravitatorio asistido por vapor (SAGD).
SAGD es un proceso de recuperación de crudo donde el vapor es inyectado en el
yacimiento por un pozo que se encuentra sobre el pozo productor, además, ambos pozos se
encuentran ubicados cerca de la base del yacimiento. La manera como el vapor se inyecta en el
yacimiento puede ser a través de un pozo horizontal, uno o varios pozos verticales, en cualquier
caso, los mismos deben estar cerca del pozo productor y alineados con éste. La figura 4.1 ilustra
un entorno SAGD establecido en el yacimiento.
Es fundamental que el vapor sea inyectado de manera continua en la zona de la cual se busca
extraer el crudo, para que el mismo sea reemplazado por una cámara de vapor que mantendrá
las condiciones estáticas del yacimiento, el crudo en las cercanías de la interfaz entre el vapor y
la arena saturada de crudo es calentado a la temperatura del vapor por medio de la conducción
térmica fundamentalmente, el efecto principal de este calentamiento es que la viscosidad del crudo
se vea disminuida con lo cual viene a ser más fluído y por tanto con una movilidad mayor. Como
consecuencia de la diferencia de densidad entre el vapor y el crudo que ha sido calentado en la
interfaz cámara de vapor - crudo, éste comienza a drenar por efecto de la fuerza de gravedad
-14-
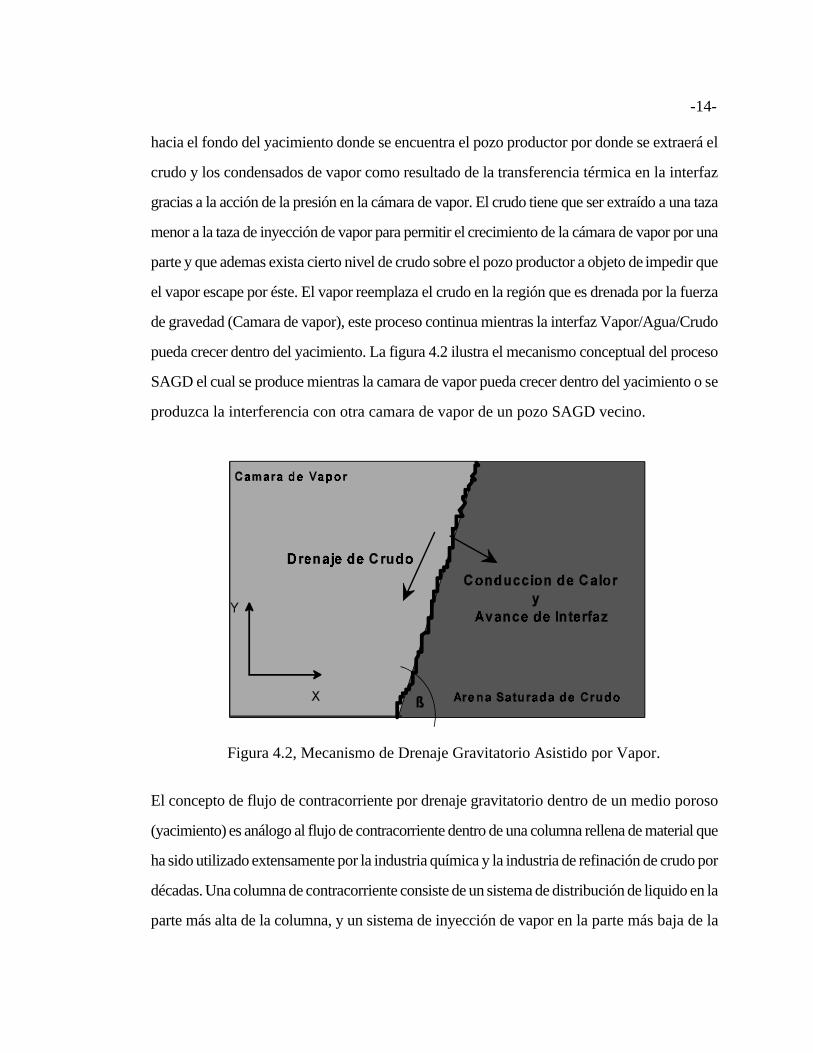
Figura 4.2, Mecanismo de Drenaje Gravitatorio Asistido por Vapor.
hacia el fondo del yacimiento donde se encuentra el pozo productor por donde se extraerá el
crudo y los condensados de vapor como resultado de la transferencia térmica en la interfaz
gracias a la acción de la presión en la cámara de vapor. El crudo tiene que ser extraído a una taza
menor a la taza de inyección de vapor para permitir el crecimiento de la cámara de vapor por una
parte y que ademas exista cierto nivel de crudo sobre el pozo productor a objeto de impedir que
el vapor escape por éste. El vapor reemplaza el crudo en la región que es drenada por la fuerza
de gravedad (Camara de vapor), este proceso continua mientras la interfaz Vapor/Agua/Crudo
pueda crecer dentro del yacimiento. La figura 4.2 ilustra el mecanismo conceptual del proceso
SAGD el cual se produce mientras la camara de vapor pueda crecer dentro del yacimiento o se
produzca la interferencia con otra camara de vapor de un pozo SAGD vecino.
El concepto de flujo de contracorriente por drenaje gravitatorio dentro de un medio poroso
(yacimiento) es análogo al flujo de contracorriente dentro de una columna rellena de material que
ha sido utilizado extensamente por la industria química y la industria de refinación de crudo por
décadas. Una columna de contracorriente consiste de un sistema de distribución de liquido en la
parte más alta de la columna, y un sistema de inyección de vapor en la parte más baja de la

-15-
Figura 4.3, Analogía entre Columna de Contracorriente y proceso SAGD.
columna, donde el vapor asciende a travéz del material debido a la diferencia de densidades entre
el vapor, el material y el líquido, vease figura 4.3. El vapor sube a través del medio poroso
intermedio (Paquete) y el líquido desciende arrastrando consigo los compuestos que interesan del
relleno, para luego ser colectado al fondo de la columna y continuar con el proceso de refinación.
4.1.3.1. Beneficios del proceso SAGD.
Los beneficios que se han percibido hasta el momento por esta técnica sobre los pozos
verticales con inyección de vapor son los siguientes:
Ç Alta producción de crudo relativa al numero de pozos empleados.
Esto es debido a que la superficie efectiva (Camara de vapor) de un pozo horizontal es

-16-
mucho mayor que en el caso de un pozo vertical, con lo cual se asegura una mayor
producción, en adición, como consecuencia de que el crudo sea continuamente
producido esencialmente a la temperatura del vapor, se asegura la alta movilidad del
crudo por su disminución en la viscosidad, mientras que en determinados pozos verticales
con recuperación térmica, la temperatura y movilidad del crudo desciende con el tiempo,
siendo necesario un proceso cíclico de calentamiento o inyección alternada de vapor.
Ç Altos volúmenes de crudo producido en función del volumen de vapor inyectado.
La concentración de calor dentro de los confines y vecindad de la camara de vapor
minimiza las pérdidas de calor a través de los estratos superiores e inferiores, con lo cual
todo el calor del vapor inyectado se transfiere al crudo del yacimiento.
Ç Mayor recuperación final del crudo en sitio (Taza de recobro).
El proceso de SAGD establece una alta conformación aérea y vertical a través de la
superficie superior del pozo horizontal en contacto con el yacimiento y a través de la
recuperación de petróleo debido al mecanismo de drenaje gravitatorio.
Ç Producción reducida de arena y sedimentos.
Debido a que la superficie neta de un pozo productor horizontal es mucho mayor que la
superficie neta de un pozo vertical, la velocidad del crudo es mucho menor para el primer
caso con lo cual el arrastre de arenas (Sedimentos) se ve ampliamente reducido.
Ç Minimización de la interferencia entre pozos.
Como el proceso SAGD intrínsecamente balancea la distribución de vapor en relación
con el crudo drenado en un lugar especifico del yacimiento, los gradientes de presión y
temperatura no se extienden más alla de una pequeña región aledaña a la camara de
vapor, con lo cual la interferencia entre pozos es mínima.

-17-
4.1.3.2. Limitaciones del proceso SAGD.
Las dos principales limitaciones del proceso SAGD son:
Ç Permeabilidad Vertical.
El proceso SAGD no es aplicable a entornos de yacimiento que tienen una permeabilidad
vertical absoluta de valor bajo.
Ç Longitud del Pozo.
La máxima longitud posible de la sección horizontal del pozo se encuentra limitada por
las consideraciones en la caída de la presión de vapor
Ç Permeabilidad vertical.
El proceso SAGD es seguro en cuanto al fácil movimiento del vapor hacia la parte
superior de la camara de vapor, como del drenaje hacia la parte inferior de dicha camara
donde se encuentra el pozo productor. Si la permeabilidad vertical absoluta es baja, la
taza de desplazamiento por efecto de la fuerza de gravedad se ve afectada de manera
adversa. De manera similar, si existen barreras verticales en el yacimiento la taza de
desplazamiento gravitacional puede disminuir y por tanto la taza de crudo recuperado es
reducida.
Ç Longitud del pozo horizontal.
En pares de pozos horizontales - un inyector y un productor, la máxima longitud posible
del inyector es influenciada por la caída de presión dentro de la sección horizontal.
Debido a la proximidad entre los dos pozos horizontales, la caída de presión entre ellos
es pequeña. Para asegurar una conformación uniforme del vapor a través de la sección,
la presión en el extremo final horizontal del inyector no debe ser muy alta o el vapor
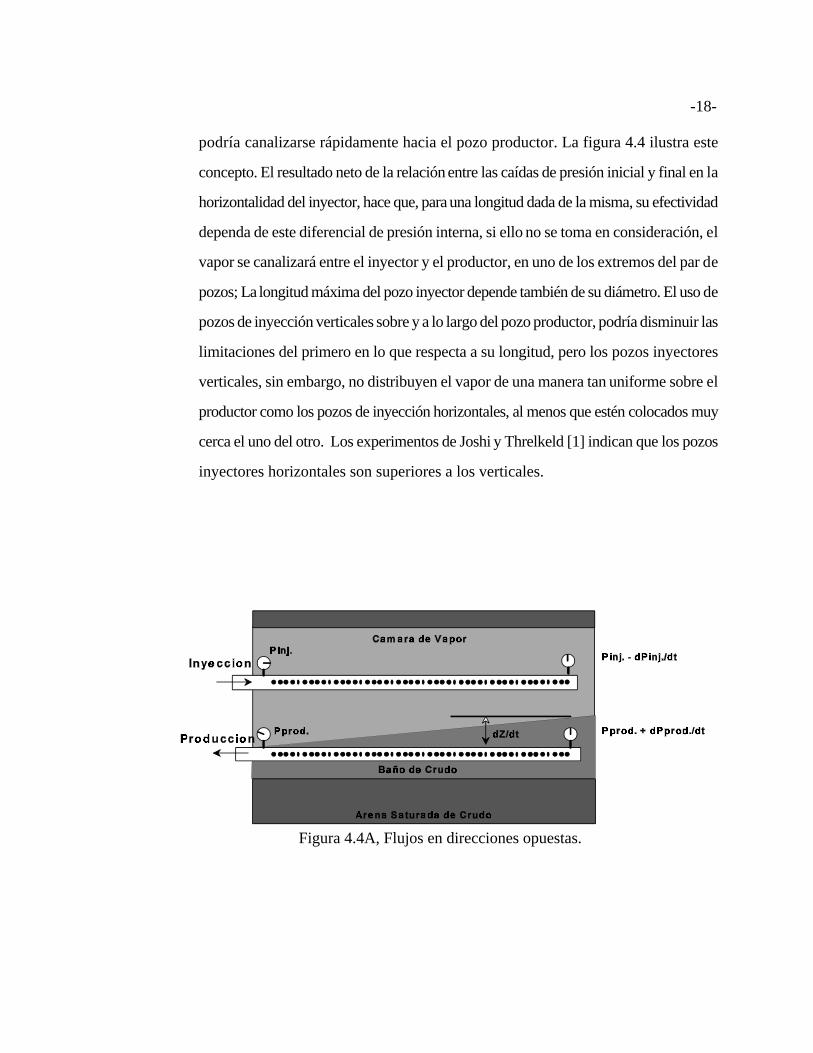
-18-
Figura 4.4A, Flujos en direcciones opuestas.
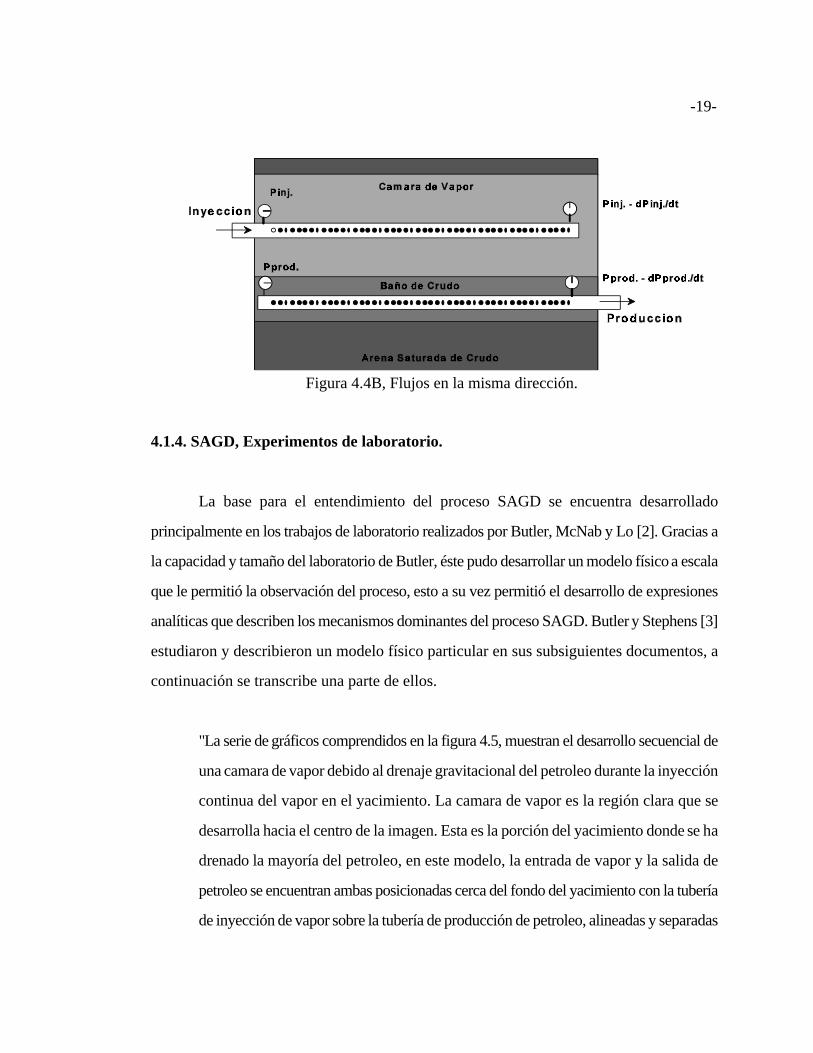
podría canalizarse rápidamente hacia el pozo productor. La figura 4.4 ilustra este
concepto. El resultado neto de la relación entre las caídas de presión inicial y final en la
horizontalidad del inyector, hace que, para una longitud dada de la misma, su efectividad
dependa de este diferencial de presión interna, si ello no se toma en consideración, el
vapor se canalizará entre el inyector y el productor, en uno de los extremos del par de
pozos; La longitud máxima del pozo inyector depende también de su diámetro. El uso de
pozos de inyección verticales sobre y a lo largo del pozo productor, podría disminuir las
limitaciones del primero en lo que respecta a su longitud, pero los pozos inyectores
verticales, sin embargo, no distribuyen el vapor de una manera tan uniforme sobre el
productor como los pozos de inyección horizontales, al menos que estén colocados muy
cerca el uno del otro. Los experimentos de Joshi y Threlkeld [1] indican que los pozos
inyectores horizontales son superiores a los verticales.
-19-
Figura 4.4B, Flujos en la misma dirección.
4.1.4. SAGD, Experimentos de laboratorio.
La base para el entendimiento del proceso SAGD se encuentra desarrollado
principalmente en los trabajos de laboratorio realizados por Butler, McNab y Lo [2]. Gracias a
la capacidad y tamaño del laboratorio de Butler, éste pudo desarrollar un modelo físico a escala
que le permitió la observación del proceso, esto a su vez permitió el desarrollo de expresiones
analíticas que describen los mecanismos dominantes del proceso SAGD. Butler y Stephens [3]
estudiaron y describieron un modelo físico particular en sus subsiguientes documentos, a
continuación se transcribe una parte de ellos.
"La serie de gráficos comprendidos en la figura 4.5, muestran el desarrollo secuencial de
una camara de vapor debido al drenaje gravitacional del petroleo durante la inyección
continua del vapor en el yacimiento. La camara de vapor es la región clara que se
desarrolla hacia el centro de la imagen. Esta es la porción del yacimiento donde se ha
drenado la mayoría del petroleo, en este modelo, la entrada de vapor y la salida de
petroleo se encuentran ambas posicionadas cerca del fondo del yacimiento con la tubería
de inyección de vapor sobre la tubería de producción de petroleo, alineadas y separadas
-20-
verticalmente 1". El vapor fluye dentro de la camara de vapor a presión atmosférica para
reemplazar el petroleo que se ha calentado y el vapor condensado que han sido
drenados, donde la saturación residual de petroleo en la camara de vapor es típicamente
de alrededor del 5%".
En la figura 4.5, se observa como el vapor se desplaza hacia arriba sin ningún otro
gradiente de presión aplicado que el producido por la diferencia de densidades entre el vapor y
la fase líquida del petroleo caliente. A medida que el petroleo es removido del modelo, el vapor
fluye en la camara para reemplazar el volumen de petroleo y vapor condensado que han sido
extraídos a través de la tubería de producción. El trabajo de Butler indica que la contracorriente
física entre vapor y el proceso de drenaje gravitatorio de petroleo puede funcionar.
Conceptualmente, el proceso es simple ya que se basa principalmente en la transferencia de calor
desde el vapor hacia la arena saturada de petroleo para cambiar su propiedad física de
viscosidad y poder fluir hacia el fondo por efecto de la fuerza de gravedad, donde una parte del
vapor se condensará como resultado de este proceso, y será recuperado en forma de agua junto
con el petroleo que es extraído del fondo de la camara de vapor, de esta manera, corrientes
adicionales de vapor fluyen dentro de la camara de vapor para reemplazar el volumen de vapor
condensado. Butler demostró la manera como impacta el mecanismo del proceso SAGD sobre
el desempeño del mismo por medio del desarrollo de las ecuaciones analíticas apropiadas que
correspondieron con el comportamiento del sistema físico bajo experimentación.
Desde los estudios de Butler, otros investigadores han confirmado los resultados del
proceso SAGD. Joshi y Threlkeld (1984) investigaron el proceso de drenaje gravitatorio a través
de la configuración de tres sistemas independientes de pozos. Ellos estudiaron el comportamiento
de:
C Pares de pozos horizontales.
C Pozos verticales de inyección de vapor sobre un pozo de producción horizontal.

-21-
Figura 4.5, Desarrollo de la camara de vapor del proceso SAGD en un modelo físico delaboratorio.
C Pozo de inyección / extracción vertical donde se incluyó un separador entre los puntos
de inyección y producción.
Cada una de estas configuraciones se ilustra en la figura 4.6. Los resultados obtenidos
de los modelos físicos de Joshi indican que el concepto de los dos pozos horizontales arrojan un
desempeño ligeramente mejor que el de las otras dos configuraciones, como se indica en la figura
4.7.

-22-
Figura 4.6A, Par pozos SAGD Horizontales.
Figura 4.6B, Pozos Inyectores Verticales, Productor Horizontal.

-23-
Figura 4.6C, Pozo SAGD Single.
Figura 4.7, Rendimiento de las diferentes configuraciones.

-24-
Joshi concluyó que con los pares de pozos horizontales se recuperaba el petroleo más
eficientemente porque "Este sistema calienta el yacimiento de manera más uniforme". Sin
embargo, la similaridad de resultados encontrados por Joshi para las tres diferentes
configuraciones de pozos podría haber ocurrido debido a las dimensiones del modelo físico. En
aplicaciones de campo con pozos cuyas distancias y longitudes sean mayores, puede existir una
marcada diferencia en el desempeño entre cada configuración.
En cualquier caso, los resultados de Joshi dan soporte al concepto de Butler sobre el proceso de
drenaje por efecto de la fuerza de gravedad (Drenaje gravitatorio), en el que de manera
esquemática se representan los mecanismos del drenaje gravitatorio de manera similar a Butler
(Figura 4.1). Además, el modelo físico de Joshi muestra el crecimiento de la camara de vapor en
la parte superior al igual que el modelo de Butler (Figura 4.5). A continuación se transcribe parte
del sumario que realizo Joshi sobre la manera en que la inyección de vapor puede ser reducida
a nivel tal que la caída de presión existente entre los puntos de producción e inyección sea
mínima.
"En cada experimento, se inyectó vapor de 4 a 7 Psi con 2 o 3 EF de sobrecalentamiento
en los poros del material compuesto por arena y bitumen a través del pozo de inyección,
con solamente una pequeña caída de presión existente entre el pozo de inyección y el
pozo de producción, sin embargo, se pudo apreciar una significativa diferencia de
temperatura entre los dos pozos. Al comienzo de la inyección de vapor, la temperatura
del pozo productor fue de alrededor de 71 EF. A medida que el tiempo transcurría la
temperatura media del fluido a la salida del pozo productor se incrementó. A esta
temperatura no se le permitió el exceder los 180 - 190 EF para garantizar que siempre
existiese un nivel de fluido sobre el pozo productor. Como se indicó en un comienzo, la
válvula reguladora a la salida del pozo productor y la limitada caída de presión entre el
pozo productor y el pozo inyector previene que se produzca un corto circuito de vapor
entre ambos pozos. Esto ayuda al vapor de baja densidad en su ascenso hacia la parte

-25-
superior de la camara y forma una burbuja sobre el pozo inyector de vapor. El progreso
de la burbuja de vapor con respecto al tiempo se muestra en la figura 4.5. Como se
puede ver en esta figura, cuando la mayoría del yacimiento ha sido drenado, el vapor
alcanza el pozo productor, escapa por el mismo y el experimento termina.

-26-
4.1.5. Referencias.
[1] Joshi, S. D. And Threlkeld, C. B. , “Laboratory Studies of Thermally-Aided Gravity
Drainage Mechanism Using Horozontal Wells”, presentada en la quincuagésima
conferencia anual sobre actualizacion en los avances tecnologicos en recuperacion de
petroleo, Calgary, Alberta (Junio 14 - 15, 1984).
[2] Butler, R. M., McNab, G. S. y Lo, H. Y., “Theoretical Studies on the Gravity Drainage
of Heavy Oil During In Situ Steam Heating”, presentada en la vigésima novena
conferencia Canadiense sobre ingeniería química, Sarnia, Ontario (Octubre 1, 1979). The
Canadian Journal of Chemical Engineering, Vol. 59, Agosto 1981, pp. 455 - 460.
[3] Butler, R. M. y Stephens, D. J., “The Gravity Drainage of Steam - Heated Heavy Oil to
Parallel Horizontal Wells”, trigésimo primer encuentro tecnico de la Sociedad Petrolera
de CIM, Calgary, Alberta (Mayo 25 - 28, 1980) documento No: 80 - 31 - 31.

-27-
4.2. Introducción a la lógica difusa.
La lógica difusa (Fuzzy Logic) es considerada una generalización de la teoría de conjuntos
que permite que los elementos de un conjunto tengan grados intermedios de pertenencia por
medio de una función característica. Con esta idea se modifica el concepto de bivalencia (0s y
1s) de la lógica booleana, el cual pasa a ser un caso particular de los conjuntos difusos. La teoría
de lógica difusa ha creado en los últimos años la segunda generación de modelos de
representación del conocimiento, mejor conocidos como sistemas expertos difusos. También,
ha revolucionado el mercado japonés de electrodomésticos al incorporar de forma sencilla
conocimiento humano experto en sistemas de control con características no-lineales. Esto,
gracias a lo sencillo del diseño de los sistemas difusos y al alto grado de precisión logrado en los
sistemas de control y decisión creados con esta lógica.
Areas de aplicación incluyen, pero no se limitan a: comunicaciones entre hombre-
máquina, medicina, robótica, estudio y estimación de recursos naturales, análisis de señales e
imágenes, sistemas de control de procesos, electrodomésticos y computadoras.
4.2.1. Breve recuento histórico.
La precisión exhibida por las matemáticas debe su éxito en gran parte a los esfuerzos de
Aristóteles y de los filósofos griegos que lo precedieron. En sus esfuerzos por derivar una teoría
concisa de lógica y más tarde de matemáticas propusieron las llamadas “Leyes del Pensamiento”.
Una de estas leyes, la “Ley del medio excluyente” propone que toda proposición debe ser o
verdadera o falsa. Ya para la época en que Parminedes propuso la primera versión de esta ley
(Alrededor de 400 A.C.) existían fuertes objeciones. Por ejemplo, Heraclito propuso que las
cosas podrían ser simultáneamente Verdad o No verdad.

-28-
Fue Platón quien sentó las bases de lo que se conocería luego como Lógica Difusa,
indicando que había una tercera región más allá de verdadero y falso, donde estos extremos se
unían. Otros filósofos modernos como Hegel, Marx y Engels también proclamaron sus puntos
de vistas, pero fue Lukasicwicz quien por primera vez propuso una alternativa sistemática a la
lógica bivalente de Aristóteles.
Durante la década de 1900, Lukasicwicz describió una lógica de tres valores junto con
las matemáticas que la describían. El tercer valor que él propuso tomaba el significado de
“Posible” y le asignó un valor intermedio entre verdadero y falso. Eventualmente desarrolló toda
una notación y sistema axiomático con el cual pensaba derivar las matemáticas modernas. Mas
tarde Lukasicwicz exploró lógicas de cuatro valores y declaró que en principio no había nada que
previniese la derivación de una lógica de valores infinitos. Lukasicwicz sintió que la lógica de tres
valores y de infinitos valores eran las más interesantes pero finalmente decidió quedarse con la
de cuatro valores ya que era la más fácil de adaptar a la lógica Aristoteliana.
No fue sino hasta recientemente que la noción de una lógica de valores infinitos se
propuso formalmente. En 1965 Lotfi Zadeh publicó su trabajo “Fuzzy Sets” en el cual se
describían las matemáticas de la teoría de conjuntos difusos y por defecto de la lógica difusa.
Esta teoría propuso la creación de una función de pertenencia en la cual los extremos estarían
representados por los valores verdadero y falso, operando sobre el rango de números reales
comprendidos entre 0 y 1. Un conjunto de operaciones nuevas fueron introducidas y
demostraron ser al menos en principio una generalización de la lógica clásica.
4.2.2. ¿Que es lógica difusa?.
Las ciencias utilizan conceptos tanto vagos como precisos. Nacimiento, muerte, blanco
-29-
y negro, son conceptos precisos; fiebre, anemia y obesidad son vagos. Usualmente, conceptos
vagos son tratados como si fueran precisos. Por ejemplo, se podría insistir en un diagnostico
médico de que fiebre, anemia y obesidad están presentes o ausentes. Este tipo de clasificaciones
impuestas son a veces el producto de valores preestablecidos que tienen que ser excedidos por
una variable de cierta importancia. Aunque la clasificación binaria puede que sea conveniente
para el diseño de un esquema de decisiones, ésta frecuentemente produce un modelo
distorsionado que puede impedir significativamente las decisiones.
La lógica difusa provee una herramienta para preservar el concepto de vaguedad en vez
de eliminarlo mediante la imposición arbitraria de sentencias ciertas o falsas provenientes de la
lógica bivalente. Mucha de la lógica detrás del razonamiento humano no está basada en blancos
y negros, ceros y unos sino en matices de grises y de valores intermedios. Esto se refleja en el
hecho de que la experticia humana, la cual los sistemas expertos pretenden transferir a las
máquinas, es muy frecuentemente dependiente del ambiente, incompleta y de poca confiabilidad.
De esta misma manera, la mayoría de las decisiones en el mundo real se llevan a cabo en un
ambiente en el cual los objetivos, las restricciones y las consecuencias de las acciones posibles
no son conocidas con precisión. Para manejar la imprecisión cuantitativamente, usualmente se
emplean los conceptos y técnicas de la teoría de probabilidades y, particularmente, las
herramientas proporcionadas por la teoría de decisiones, la teoría de control y la teoría de la
información. Al hacer esto, se acepta la premisa de que imprecisión, cualquiera sea su naturaleza
puede ser reducida a procesos aleatorios. Esto desde el punto de vista de la lógica difusa, es
incorrecto.
Específicamente, los adeptos a la lógica difusa proponen la necesidad de una
diferenciación entre procesos aleatorios y procesos difusos. Por procesos difusos, se entiende
un tipo de imprecisión que está asociada con conjuntos difusos, esto es, clases en las cuales no
hay una transición tajante de pertenencia a no pertenencia. Por ejemplo, la clase de objetos

-30-
Figura 4.8, Teoría de conjuntos vs Conjuntos Difusos
azules es un conjunto difuso. Al igual lo son las clase de objetos caracterizados por adjetivos tan
comunes como: largo, pequeño, significante, importante, caliente, frío, serio, simple, etc.
Realmente en el mundo hay pocas clases en las cuales existan fronteras bien delimitadas que
separan aquellos objetos que pertenecen a una clase de aquellos que no pertenecen.
En este sentido es importante notar que en las comunicaciones entre humanos,
expresiones como “Juan es más alto que Pedro” , “x es mucho más largo que y” conllevan
información a pesar de lo impreciso de su definición. De hecho, se podría decir que la mayor
diferencia entre inteligencia humana y la inteligencia en máquinas recae en la habilidad exhibida
por los humanos para manejar conceptos difusos y a responder a instrucciones difusas. Es así
como hoy en día es imposible decirle a una computadora que mueva “Un poquito” el cursor hacia
la derecha sin caer en la necesidad de aportar el dato numérico exacto para realizar dicha
operación.
Para resumir un poco todas estas ideas se puede establecer que por una parte, los
conjuntos difusos son utilizados para representar la imprecisión asociada a la definición de los
limites de un conjunto. En la figura 4.8 se observa como los conjuntos Frío, Tibio y Caliente son
vistos desde el punto de vista de la teoría clásica de conjuntos y de la teoría de los conjuntos
difusos, respectivamente.
-31-
En el primer caso, la pertenencia de una temperatura cualquiera en estos conjuntos es
mutuamente exclusiva. Es decir de acuerdo a esta definición, la lectura de un termómetro es frío,
tibio o caliente. Los limites que definen estos conjuntos son tajantes ya que a partir de 25 grados
se considera que de frío se pasa inmediatamente a tibio. En el caso de los conjuntos difusos esta
transición es gradual en todos los puntos de temperatura; lo cual se ajusta mucho más a la
imprecisión asociada a la definición de las fronteras de estos conjuntos.
En segundo lugar se tiene la relación que existe entre lógica difusa y la teoría de
probabilidades. Mucho se ha dicho acerca de que la teoría de lógica difusa no es más que
probabilidades escondidas bajo un disfraz. En otros casos se acepta la existencia de este tipo
de lógica pero sin embargo se proclama que cualquier cosa que se pueda hacer con lógica difusa
se puede hacer igual o mucho mejor con la teoría de probabilidades. En el siguiente punto se
narra una situacion que pudiera explicar la diferencia básica entre estas dos disciplinas:
4.2.3. El viajero sediento.
Definase un universo como el conjunto de todos los líquidos y al subconjunto difuso L
como todos los líquidos que contienen agua en alguna forma, donde el agua mineral tendría un
nivel de pertenencia de 1 y las aguas servidas (negras) tendrían un nivel de pertenencia de 0.
Suponga que alguien ha estado por una semana en el desierto sin ingerir liquido potable alguno
y se encuentra de repente con dos botellas etiquetadas A y B. En la botella A se encuentra una
etiqueta que lee “Probabilidad = 0.91”, mientras que en la botella B se encuentra una etiqueta que
lee “Pertenencia = 0.91”. Confrontado con esta situación y dado que debe beber de la botella
que seleccione, ¿cual escogería primero?.
Gente familiarizada con la teoría de conjuntos difusos observarían que B podría contener

-32-
por ejemplo, agua de río, pero nunca algo así como solucion de ácido clorhídrico. En otras
palabras, “Pertenencia = 0.91” significa que cualquiera que sea el contenido de la botella B, éste
será “bastante cercano” al agua mineral. En el otro caso, la probabilidad de que la botella A es
potable (0.91) significa que a través de un largo proceso de experimentación, los posibles
contenidos de la botella A se esperan que sean potables en alrededor de 91 % de los
experimentos. ¿Y el otro 9 %?, en estos casos el agua estará totalmente contaminada e imposible
de beber (¡Posiblemente mortal!). Esto quiere decir que 1 de 10 veces se podría morir
envenenado. Luego, la mayoría de los sujetos optarían por beber agua de río y escogerían la
botella B.
Otra faceta de este ejemplo se relaciona con la idea de observación. Supongase que
se examina los contenidos de las botellas A y B, y se descubre que son ácido clorhídrico y agua
de laguna respectivamente. Después de la observación se tiene entonces que el concepto de
pertenencia de la botella B pasaría de 0.91 a 0.70, mientras que el valor de la probabilidad de
A claramente se caería de 0.91 a 0.
Finalmente, ¿cual sería el efecto de que ambas botellas tuviesen igual valor numérico en
este ejemplo?. Supongase que los valores de pertenencia y probabilidad fuesen ambos 0.5,
¿influenciaría esto la elección?. Seguramente lo haría. En este caso, muchos observadores se
cambiarían a la botella A, ya que esta ofrece 50 % de chances de ser potable, mientras que un
valor de pertenencia tan bajo como 0.5 indicaría presumiblemente un líquido no adecuado para
ser consumido (agua de pantano). En resumen, este relato muestra como estos dos tipos de
modelos poseen diferentes tipos de información.

-33-
4.2.4. El Control difuso.
4.2.4.1. Orígenes y objetivo.
El objetivo de los sistemas de control con lógica difusa es el control de los procesos
complejos por medio de la experiencia humana, donde, los sistemas de control por lógica difusa
y los sistemas expertos provienen del mismo origen. Sin embargo, existen entre ellos diferencias
importantes que no pueden ser ignoradas. Mientras los sistemas expertos tratan de aprovechar
al máximo el conocimiento adquirido de un experto para dar soporte a usuarios en un dominio
desconocido para ellos, los sistemas de control por lógica difusa deben ser considerados como
diseñados para el control de un proceso técnico muy específico. El rango de complejidad de
estos procesos va desde cámaras de video, procesamiento de imágenes, reconocimiento de
patrones, plantas industriales hasta aspiradoras y lavadoras domésticas, además, los métodos de
control difuso han cambiado de la traslación original de la experiencia humana en las reglas de
control a una aproximación mayormente orientada en la ingeniería, donde, el objetivo es sintonizar
el controlador hasta que su desempeño sea el más parecido al de un operador humano
experimentado en el área, sin esperar por supuesto, que el controlador posea características
humanas en su funcionamiento.
Los sistemas de control convencional (No difuso) se encuentran diseñados con la ayuda
de modelos matemáticos y/o físicos del proceso bajo consideración, donde el diseño de los
modelos apropiados requieren del ingeniero una gran cantidad de tiempo y de bases teórico
matemáticas muy sólidas. Como el modelado es un proceso de abstracción, el modelo resultante
será siempre una versión simplificada del proceso donde los errores son tratados por medio de
las señales de ruido o modelos de estado suplementarios. Sin embargo, muchos procesos pueden
ser controlados por seres humanos sin la necesidad del algún tipo de modelo matematico,

-34-
Figura 4.9, Lazo de control cerrado
además, existen procesos que no pueden ser controlados por medio de los sistemas de control
convencionales pero son accesibles al control de los operadores humanos. Por ejemplo, mucha
gente con y sin licencia de conducir puede manejar o controlar un vehiculo sin necesidad del
modelo matemático del automóvil, donde el nivel de habilidad dependerá de la práctica
desarrollada.
4.2.4.2. El Control Automático.
El control automático de cualquier proceso técnico se apoya fundamentalmente en la
comparación de un estado deseado del proceso con algún estado actual medido o evaluado. El
controlador trata de alcanzar el estado deseado o setpoint por el ajuste de los valores de entrada
al proceso que son idénticos a los valores trasladados a la salida del controlador. Debido a la
constante comparación de estos valores es que se obtiene un sistema de lazo cerrado, donde
usualmente las señales de ruido causan desviaciones del punto de trabajo deseado o setpoint
(incrementando el nivel de error) y esto cambia de manera dinámica la salida del controlador
(acción de control). La figura 4.9 muestra un lazo de control cerrado o realimentado.
gg''[gg(k),gg(k&&1),gg(k&&2),...,gg(k&&r)]
µ''[µ(k&&1),µ(k&&2),µ(k&&3),...,µ(k&&r)]
µ(k)''öö[gg(k),µ(k)]
-35-
(1)
(2)
(3)
Las estrategias de control convencionales utilizan modelos del proceso o resultados
experimentales del mismo como base para el diseño de las acciones de control. El controlador
PID (Proporcional, Integral, Diferencial) es bien conocido y ampliamente utilizado como un
paradigma de diseño, éste utiliza la información sobre el comportamiento de la relación entrada -
salida del proceso para generar la acción de control, donde el comportamiento del lazo cerrado
se encuentra controlado por los diferentes valores de ganancia de la accion proporcional, integral
y diferencial que pueden ser ajustados de manera independiente por el ingeniero de control.
Los sistemas de control por computadora o control digital directo (CDD) tienen que
trabajar con los valores muestreados y por lo tanto deben utilizar modelos de sistemas de control
en tiempo discreto y unidades de muestreo. Por este motivo la acción de control es una función
del vector de errores o del error mas reciente gg. Para:
donde k es el tiempo de muestreo, r es el tiempo de la ultima muestra a considerar y el vector de
control es µ Para:
Del planteamiento matemático anterior se puede establecer que la acción de control µ
viene ha estar determinada por:
Donde öö determina una función. Cabe resaltar que gg(k) y µ(k) pueden ser vectores
de un sistema multivariable tanto a la entrada como a la salida.

-36-
4.2.4.3. El controlador difuso.
Los controladores difusos son sistemas especiales o particulares de control digital directo
que utilizan reglas de inferencia o conocimiento para modelar el proceso de una manera explícita.
En lugar de diseñar algoritmos que definan de la manera más formal posible la acción de control
como una función de las variables de entrada, el diseñador del controlador difuso establece reglas
que enlazan las variables de entrada con las acciones de control por intermedio de las reglas de
inferencia.
Considérese por ejemplo un equipo de aire acondicionado (ya sea del automóvil o el
hogar), donde si la temperatura ambiental es ligeramente alta probablemente se desearía
incrementar la potencia del acondicionador de aire un poco. Si se buscase utilizar un controlador
difuso, el ingeniero del conocimiento deberá interpretar los términos ligeramente alta y un poco
como términos de una variable lingüística y escribir las reglas que enlazan estas variables de la
siguiente manera:
Si la temperatura = ligeramente alta, entonces:
el cambio de potencia = incrementar un poco
Después de que las reglas han sido definidas, el proceso de control arranca con el cálculo
de todas las consecuencias de estas reglas, las cuales se agregan luego al conjunto difuso que
describe las posibles acciones de control. Para este caso en particular corresponderán a
diferentes valores en el cambio de la potencia. Estos cálculos son realizados por la unidad
computacional ya que el sistema de acondicionamiento ambiental no entiende acciones de
control como incrementar un poco la potencia, esto implica que la acción de control difusa
correspondiente tiene que ser transformada en una acción de control puntual utilizando el modulo
desfusificador. El ejemplo anterior ilustra los ingredientes principales de un controlador difuso,

-37-
Figura 4.10, Controlador tipo Mamdani
los cuales se podrían resumir en:
Las reglas base que operan con las variables lingüísticas.
El modulo fusificador que genera términos lingüísticos a partir de los valores puntuales de
las variables de entrada (Temperatura para el ejemplo antes propuesto).
La unidad computacional que genera los términos lingüísticos de las variables de salida
en función de los términos de entrada y las reglas de inferencia.
El modulo desfusificador que traduce los resultados lingüísticos de la unidad
computacional en los valores puntuales que determinan la magnitud de la acción de
control.
En la figura 4.10 se describe de manera general un controlador difuso del tipo ¨Mamdani¨.
Cuando se diseña un controlador difuso, varias consideraciones tiene que ser tomadas
en cuenta con respecto a la estructura y metodología a seguir para poder construirlo. A

-38-
continuación se determinan los parámetros básicos para el diseño de cualquier controlador
difuso.
Entradas, el número de señales de entrada, el número de estados derivados para cada
señal de entrada, la normalización o escalamiento de las diferentes señales de entrada.
Fusificación, el tipo de funciones de pertenencia como extendida, media, puntual, forma
de las funciones de pertenencia, simetría, puntos de cruce, soporte continuo o discreto,
granularidad o número de funciones de pertenencia por variable.
Reglas de inferencia, número de reglas, número de antecedentes, estructura de la regla
base, tipos de funciones de pertenencia como consecuencia de las reglas, peso o grado
de soporte de las reglas de inferencia.
Formas de evaluación, antecedencia en el agregado de operadores para reglas de
inferencia complejas o multi variables, operadores de inferencia.
Agregación, anexión de operadores en combinación con los resultados de las reglas
individuales, inferencia de reglas bases individuales (Aproximación funcional), inferencia
de base compuesta (Aproximación relacional).
Desfusificación, procedimiento de transformación en valores puntuales.
Salida, número de señales de salida (Normalmente determinado por la estructura del
problema), normalización y escalamiento.
-39-
4.2.4.4 El controlador tipo Mamdani.
La idea principal del controlador difuso de Mamdani es describir los estados del proceso
por medio de las variables lingüísticas, utilizando sus términos como entradas a las reglas de
inferencia para poder definir las acciones de control.
Se debe comenzar con la asignación de términos a las variables lingüísticas donde, estas
variables son magnitudes que pueden ser medidas o derivadas de señales externas que han sido
sensadas o, de variables de salida del controlador, es decir, pueden ser tanto las variables
manipuladas como las variables controladas del proceso.
Para el equipo de aire acondicionado indicado en párrafos anteriores, las posibles
variables lingüísticas serían: la temperatura de la habitación, el número de ventanas abiertas, la
temperatura externa, los cambios en la temperatura de la habitación, la humedad, la presión
atmosférica, las perturbaciones eléctricas en el equipo de aire acondicionado, el tiempo de uso
del equipo de aire acondicionado, su rendimiento calórico. etc.
De esta manera se ilustra que el número de variables lingüísticas obviamente puede
hacerse muy grande, por tanto, es fundamental tener muy claro desde un principio el rango de
importancia de las mismas, cuales son entradas y cuales son salidas, con el objeto de utilizar las
más adecuadas para describir el espacio de estado difuso.
Por otra parte, los términos que conforman las variables lingüísticas son conjuntos difusos
con una forma determinada. Las formas más populares son la forma trapezoidal y la forma
triangular debido a su eficiencia computacional, pero en principio se puede utilizar cualquier otra
forma que conste de lineas curvas.

-40-
Figura 4.11, Variable lingüística Temperatura
Figura 4.12, Variable Lingüística Cambio_de_Temperatura
Si se escoge como variables lingüísticas la Temperatura de la habitación como entrada,
la cual consta de los siguientes términos: Muy Baja (MB), Baja (B), Confortable (C), Alta (A),
Muy Alta (MA), como se indica en la figura 4.11.
Los Cambios_de_temperatura en la habitación como entrada, con los siguientes
términos: Negativamente_Grande (NG), Negativamente_Pequeño (NP), Cero (Z),
Positivamente_Pequeño (PP), Positivamente_Grande (PG), como se indica en la figura 4.12.
Y la Potencia_Electrica aplicada al motor recirculador de aire (ventilador) del equipo
de aire acondicionado como la salida, con los siguientes términos: Pequeña (P), Media (M),

-41-
Figura 4.13 Variable lingüística Potencia_Electrica
Grande (G) para la acción de control (u), como se indica en la figura 4.13.
Desde el punto de vista matemático o formal, los términos de cada variable lingüística se
describen como: VL , VL , VL , ..., VL por medio de su función de pertenencia µ (x),1 2 3 n i, j
donde i indica la variable lingüística con i= 1, 2, 3, ..., n. j indicando el termino de la variable
lingüística i para j= 1, 2, 3, ..., m(i). y m(i) es el número de términos de la variable lingüística i. El
número de variables lingüísticas y la cantidad de términos de cada variable determina el número
de posibles reglas de inferencia. En muchas aplicaciones, estados particulares pueden ser
rechazados porque son combinaciones imposibles de las variables lingüísticas o porque la acción
de control puede ser de poco efecto en el proceso, siendo en estos casos suficiente con
implementar las reglas de inferencia que cubran solamente las partes más probables del espacio
de estado difuso.
Las reglas de inferencia que conectan las variables lingüísticas de entrada con las variables
lingüísticas de salida se encuentran definidas en la descripción del espacio de estado difuso, el
cual se obtiene de la definición de estas variables. De manera formal, las reglas de inferencia
pueden ser escritas como:

Regla:Si[(X166A1,j1)Y(X266A2,j2)Y(X366A3,j3)...Y(Xn66An,jn)]ENTONCES[u66Aj]
-42-
(4)
donde A , es el j ésimo término de la variable lingüística i correspondiente a la función dei ji
pertenencia µ (x ) y A corresponde a la función de pertenencia µ (u) que representa el términoi,ji i j j
de la variable de acción de control u. Un ejemplo razonable de una regla de inferencia en el
equipo de aire acondicionado podría ser:
SI [(Temperatura ES Baja) Y (Cambio_de_Temperatura ES Positivamente_Pequeño)]
ENTONCES [ Potencia_Electrica ES Pequeña].
Un sistema de reglas de inferencia con dos entradas y una salida puede ser visualizada
como una matriz donde, la fila 0 y la columna 0 se encuentran particionadas de acuerdo a los
términos de las variables de entrada, y la combinación de ambas da origen al termino para la
variable lingüística de salida (Acción de control).
Si se considera nuevamente el equipo de aire acondicionado, un grupo de posibles reglas
de consecuencia podrían visualizarse como indica la tabla 4.1, donde, si se proporciona una
magnitud a la acción de control en concordancia con su significado lingüístico, se creará una
superficie de control, cuya frontera se encuentra definida por los estados vacíos, los cuales se
refieren a estados donde no hay acciones de control definidas de manera explícita en esta
ocasión.

-43-
Tabla 4.1 Espacio de estado difuso.
Cambio_de_temperatura
NG NP Z PP PG
Temperatura
MB P P P
B P P P M
C P M G
A P M M G
MA M M G
Por ejemplo: el estado vacío de la combinación MA, PG se refiere a un estado donde la
temperatura ambiental es muy alta y se está incrementando rápidamente, para este caso en
particular como el equipo de aire acondicionado tiene una capacidad limitada de enfriamiento
o extracción del calor, aunque éste se encuentre a su máxima capacidad es muy difícil que la
habitación alcance una temperatura confortable, una regla de inferencia que cubra esta situación
resulta superflua, sin embargo, se podría definir un valor o valores por defecto que sean utilizados
por el controlador difuso en caso de presentarse estas situaciones ya sea por funcionamiento bajo
condiciones extremas o defectos en los sensores de temperatura del equipo, taza de cambio en
la temperatura.
Un caso similar pero en sentido contrario se presenta para la combinación MB, NG, en
cuyo caso la habitación se encuentra fría y la temperatura está descendiendo, para esta
combinación no tiene sentido mantener encendido el aire acondicionado, muy por el contrario,
si el equipo contase con un sistema de calefacción, se podrían implementar las reglas de inferencia
que corrigiesen esta situación pero, en este caso el espacio de estado difuso cambiaria totalmente
ya que pasa de un sistema con una variable lingüísticas de salida a un sistema con dos variables
lingüísticas de salida, es decir, se cambia de un espacio de estado difuso en tres dimensiones a
un espacio de estado difuso en cuatro dimensiones.

""r''min[µi,j(Xentrada i)]**i''1,2,3,...,n;j''1,2,3,...,i
µr,consecuencia(u)''min[""r,µj(u)]
-44-
(5)
(6)
La definición de las variables lingüísticas y las reglas de inferencia son los pasos
principales en el diseño cuando se implementa un controlador del tipo Mamdani, donde el ultimo
paso es la selección del procedimiento más apropiado de desfusificacion el cual proporcionará
los valores puntuales que representan la acción de control, donde el núcleo computacional del
mismo puede ser descrito en los siguientes tres pasos:
Ç Determinación del grado de pertenencia de la variable lingüística de entrada en función
de sus términos (Figura 4.11 y figura 4.12)
Ç Cálculo de las reglas de inferencia en función del grado de pertenencia (Tabla 4.1)
Ç Cálculo del valor puntual de la acción de control a partir de las reglas de inferencia
El primer caso es el cálculo del grado de pertenencia de la variable de entrada a través
de sus términos, esto se logra por el empleo del operador mínimo “min” como un modelo de la
acción “Y” de la regla de inferencia, es decir, se puede calcular el grado de pertenencia de la
regla r como:
Este concepto facilita la obtención de la validez de las reglas de consecuencia. Si se
asume que algunos términos de las variables lingüísticas tiene un grado bajo de pertenencia según
el valor de la variable bajo evaluación, es obvio que también tendrán una baja validez y no
afectarán el valor final de la acción de control. De manera formal, este concepto se representa
de la siguiente forma:
El resultado de este proceso de evaluación es obtenido por la agregación de todas las

µconsecuencia(u)''maxr[µr,consecuencia(u)]
-45-
(7)
reglas de consecuencias utilizando el operador máximo “max”. De manera formal, este concepto
se representa de la siguiente forma:
Es importante hacer notar que el método de Mamdani toma en cuenta todas las reglas
en un estado simple donde no ocurren cambios, es por este motivo que el proceso de inferencia
en el control difuso es mucho mas simple que en otros sistemas expertos.
Para el ejemplo del equipo de aire acondicionado, si se asume que la Temperatura
ambiente es de 22 <C, de las lineas punteadas de la figura 4.4 se puede apreciar que la
temperatura es Confortable en un grado de pertencia de 0.4 y Alta en un grado de pertenencia
de 0.3, si además también se asume que el Cambio_de_Temperatura es de -0.6 <C/Min, de las
lineas punteadas de la figura 4.12 se puede apreciar que este cambio es
Negativamente_Pequeño en un grado de pertenencia de 0.6 y Cero en un grado de pertenencia
de 0.2, de la tabla 4.1 se puede apreciar que existen cuatro posibles acciones de control para la
condición ambiental antes dada (Celdas sombreadas), cuyas reglas de inferencia se enuncian a
continuación:
r10: SI [(Temperatura ES Confortable) Y (Cambio_de_Temperatura ES Negativamente_Pequeño)]
ENTONCES [ Potencia_Electrica ES Pequeña].
r11: SI [(Temperatura ES Confortable) Y (Cambio_de_Temperatura ES Cero)]
ENTONCES [ Potencia_Electrica ES Media].
r12: SI [(Temperatura ES Alta) Y (Cambio_de_Temperatura ES Negativamente_Pequeño)]
ENTONCES [ Potencia_Electrica ES Media].
r13: SI [(Temperatura ES Alta) Y (Cambio_de_Temperatura ES Cero)]
ENTONCES [ Potencia_Electrica ES Media].

-46-
Figura 4.14 Acción de control difusa.
el grado de pertenencia (ecuación 5) de cada una de estas reglas de inferencia será:
" = min {0.4, 0.6}= 0.410
" = min {0.4, 0.2}= 0.211
" = min {0.3, 0.6}= 0.312
" = min {0.3, 0.2}= 0.213
en concordancia con esto, la acción de control puntual (ecuación 6) sería:
µ (u) = min {0.4, (u)}10, consecuencia péqueña
µ (u) = min {0.2, µ (u)}11, consecuencia Media
µ (u) = min {0.3, µ (u)}12, consecuencia Media
µ (u) = min {0.2, µ (u)}13, consecuencia Media
La figura 4.14 indica la acción de control difusa resultante (ecuación 7) con:
µ (u)= max{µ (u), µ (u), µ (u), µ (u)}consecuencia 10, consecuencia 11, consecuencia 12, consecuencia 13, consecuencia
donde las necesidades técnicas requieren de un valor puntual para la acción de control, es por
tal motivo que ahora debe buscar un procedimiento que genere este valor del conjunto difuso
Potencia_Electrica.
Algunos métodos de desfusificacion están basados en ideas heurísticas como “Tomar la
acción que corresponda a la máxima pertenencia”, “Tomar la acción que sea la mitad entre dos

UCDA''mmU
[u@@µconsecuencia(u)]du
mmU[µconsecuencia(u)]du
-47-
Unimodal, variable linguistica con un solo termino relacional1
(8)
picos”, “Tomar la acción que corresponda al centro del área sombreada mayor” Etc.
A continuación se presentan los tres métodos formales más frecuentemente utilizados
para obtener el valor puntual de la acción de control.
4.2.5. Métodos de desfusificación.
4.2.5.1. Centro de Area (CDA).
El método del centro de área o centro de gravedad escoge la acción de control que
corresponda con el centro del área conformada por aquellos términos con nivel de pertenencia
mayor que cero, es decir, el área es cuantificada por los valores de la función de pertenencia. La
idea de este método es el agregar la información de todas las posibles acciones de control que
están representadas por la función de pertenencia, la solución así obtenida es un compromiso
debido a la dispersión o vaguedad de las reglas de consecuencias. De manera formal, la acción
de control puede ser calculada como:
Motivado a las integrales, este procedimiento puede ser muy complejo a nivel
computacional si no se dispone de un lenguaje de alto nivel, además de que puede proporcionar
resultados fuera de contexto si el conjunto difuso es unimodal . En la figura 4.15 se puede1

UCDS''mmU
[u@@""r@@µr,consecuencia(u)]du
mmU[""r@@µr,consecuencia(u)]du
-48-
(9)
apreciar el valor puntual de la acción de control para el equipo de aire acondicionado aplicando
el método del centro de área.
4.2.5.2. Centro de Sumas (CDS).
El método del centro de sumas es una versión simplificada del método del Centro de
Areas que no toma en cuenta las consecuencias agregadas del conjunto difuso pero, en cambio,
considera el resultado de cada regla de inferencia difusa de manera individual, debido a esto, el
método toma en cuenta las áreas solapadas que usualmente existen debido a la sobre posición
de términos en las variables lingüísticas. El algoritmo correspondiente a este método tiene la
ventaja de ser mucho más rápido de calcular, y por ellos se encuentra entre uno de los más
utilizados. De manera formal el método del Centro de Sumas se encuentra definido por:
En la figura 4.15 se puede apreciar el valor puntual de la acción de control para el equipo
de aire acondicionado aplicando el método del centro de sumas, es de hacerse notar que la
acción de control resultante se encuentra desplazada a la derecha por el solapamiento de los
términos Pequeña y Media, que para este método sí es tomado en cuenta.

umin''Inferioru[u00U**µconsecuencia(u)''maxu(µconsecuencia(u))]
-49-
Figura 4.15 Métodos CDA y CDS de desfusificación
(10)
4.2.5.3. Media de la Máxima (MDM).
El método de desfusificacion de la media de la máxima considera solamente el término
de las reglas de inferencia que posean el máximo grado de pertenencia, el resultado puntual es
el valor medio correspondiente al intervalo de las posibles acciones de control. La idea detrás de
este método es el de tomar la acción de control más plausible o acción de control con el más alto
grado de pertenencia, sin embargo, este método puede proporcionar resultados erróneos en el
caso de relaciones difusas multimodales donde la acción de control a escoger puede encontrarse
entre dos o más picos.
De manera formal, se puede considerar el intervalo entre el primer valor de la acción de
control con el máximo grado de pertenencia y el ultimo valor de la acción de control con el
máximo grado de pertenencia, tal como se indica a continuación:
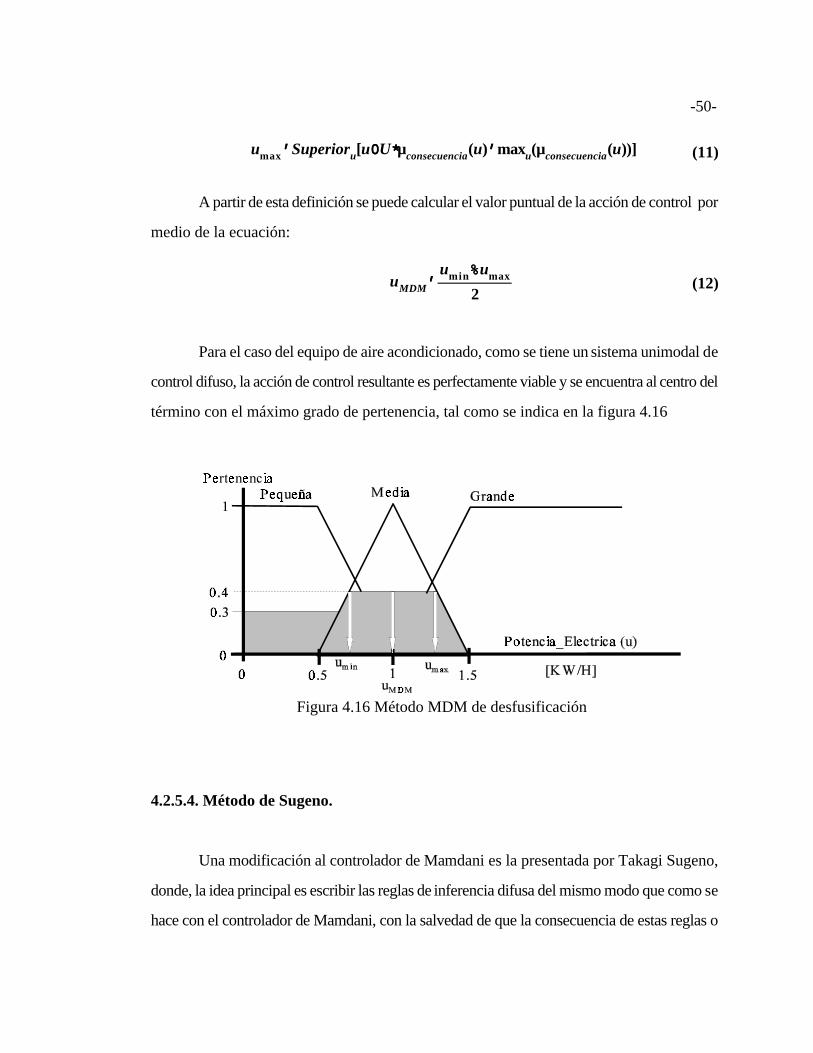
umax''Superioru[u00U**µconsecuencia(u)''maxu(µconsecuencia(u))]
uMDM''umin%%umax
2
-50-
(11)
(12)
Figura 4.16 Método MDM de desfusificación
A partir de esta definición se puede calcular el valor puntual de la acción de control por
medio de la ecuación:
Para el caso del equipo de aire acondicionado, como se tiene un sistema unimodal de
control difuso, la acción de control resultante es perfectamente viable y se encuentra al centro del
término con el máximo grado de pertenencia, tal como se indica en la figura 4.16
4.2.5.4. Método de Sugeno.
Una modificación al controlador de Mamdani es la presentada por Takagi Sugeno,
donde, la idea principal es escribir las reglas de inferencia difusa del mismo modo que como se
hace con el controlador de Mamdani, con la salvedad de que la consecuencia de estas reglas o

ENTONCES[u66öör(X1,X2,X3,...,Xn)]
Regla(r):Si[(X166A1,j1)Y(X266A2,j2)Y(X366A3,j3)...Y(Xn66An,jn)],
-51-
(13)
acción de control sea un valor puntual que es función de las variables de entrada, es decir, la regla
proporciona de manera directa la acción de control.
De manera específica, la acción de control es el resultado de la suma de los pesos de las
acciones de control correspondientes a cada regla, donde el peso de cada regla es el grado de
pertenencia del valor de entrada a la regla de antecedentes, la cual se calcula como en el
controlador de Mamdani. El principal aporte de este tipo de controlador radica en que cualquier
proceso de desfusificacion es innecesario. Una regla que defina este concepto de manera formal
sería:
Donde las variables se definen como en el caso del controlador de Mamdani. Las
funciones de consecuencia, que dependen de las variables de entrada, son usualmente lineales,
sin embargo, por la manera como se encuentra definida la regla de inferencia en el controlador
de Sugeno es posible utilizar otros tipos de funciones de consecuencia. Para el caso del equipo
de aire acondicionado, una regla de inferencia podría ser escrita como:
SI [(Temperatura ES Alta) Y (Cambio_de_Temperatura ES Cero)]
ENTONCES [ Potencia_Electrica ES (400 - 120 * Temperatura - 23 *
Cambio_de_Temperatura)].
Esta definición es solamente una relación funcional que no es operacional pero, permite
la identificación de los valores de los parámetros en la función de consecuencia.
La acción de control puede ser calculada con la ayuda de los grados de pertenencia que
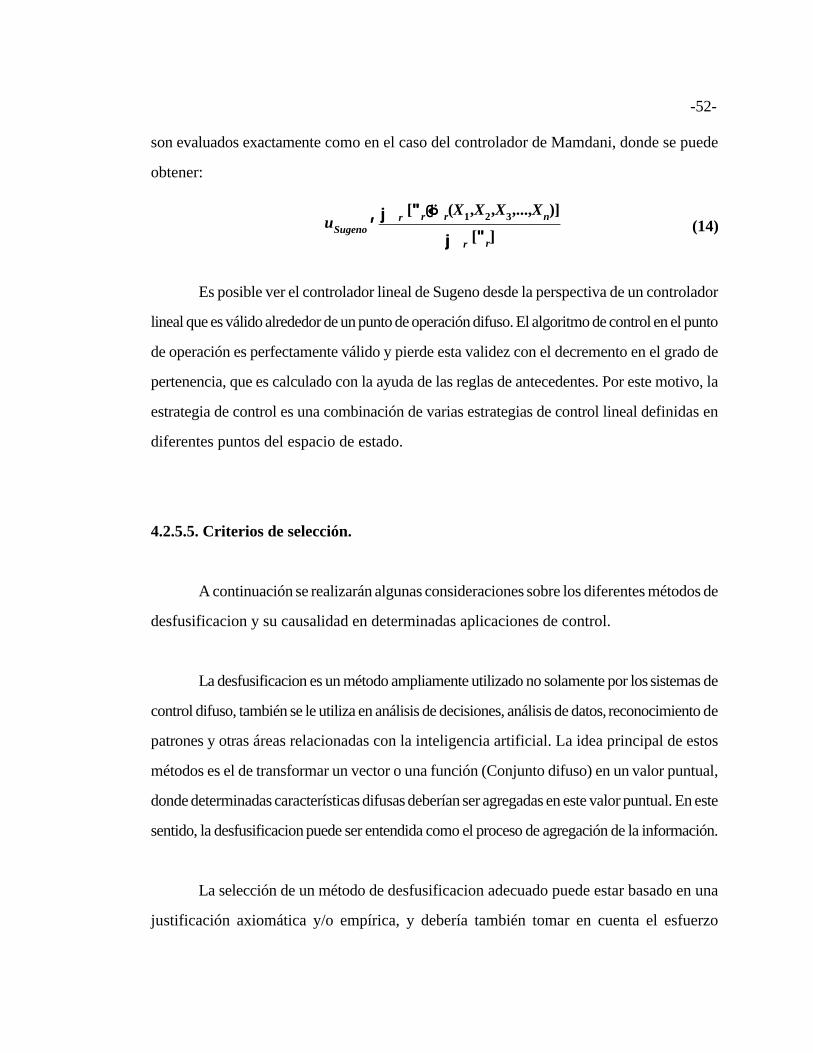
uSugeno''jjr
[""r@@öör(X1,X2,X3,...,Xn)]
jjr[""r]
-52-
(14)
son evaluados exactamente como en el caso del controlador de Mamdani, donde se puede
obtener:
Es posible ver el controlador lineal de Sugeno desde la perspectiva de un controlador
lineal que es válido alrededor de un punto de operación difuso. El algoritmo de control en el punto
de operación es perfectamente válido y pierde esta validez con el decremento en el grado de
pertenencia, que es calculado con la ayuda de las reglas de antecedentes. Por este motivo, la
estrategia de control es una combinación de varias estrategias de control lineal definidas en
diferentes puntos del espacio de estado.
4.2.5.5. Criterios de selección.
A continuación se realizarán algunas consideraciones sobre los diferentes métodos de
desfusificacion y su causalidad en determinadas aplicaciones de control.
La desfusificacion es un método ampliamente utilizado no solamente por los sistemas de
control difuso, también se le utiliza en análisis de decisiones, análisis de datos, reconocimiento de
patrones y otras áreas relacionadas con la inteligencia artificial. La idea principal de estos
métodos es el de transformar un vector o una función (Conjunto difuso) en un valor puntual,
donde determinadas características difusas deberían ser agregadas en este valor puntual. En este
sentido, la desfusificacion puede ser entendida como el proceso de agregación de la información.
La selección de un método de desfusificacion adecuado puede estar basado en una
justificación axiomática y/o empírica, y debería también tomar en cuenta el esfuerzo

-53-
computacional a nivel de cálculo con respecto al sistema final de implementación para el caso de
sistemas de control. Sin embargo, un método óptimo de desfusificacion no existe, aun así, un buen
método debería tener en cuenta los siguientes criterios:
Ç Esfuerzo Computacional: ¿Es el método lento o rápido cuando es implementado como
un algoritmo?. La herramienta de control difuso puede dar soporte o trabajar con el
método implementado de esta manera.
Ç Representación del Objetivo: ¿Debería un determinado objetivo en la acción de
control ser descartado por la consideración de todas las reglas de inferencia o por la
eliminación de resultados ambiguos?.
Ç Continuidad: En algunas aplicaciones es preferible que exista un cambio continuo en la
acción de control en lugar de pasos discretos.
Ç Causalidad: ¿Proporciona el método de desfusificacion una acción de control posible?,
es decir, corresponde la acción de control de manera eficaz con el resultado inferido.
Aparte de los métodos de desfusificacion indicados anteriormente, se pueden implementar
otros que correspondan con el criterio del Ingeniero del Conocimiento, además de que los
mismos deben tener en consideración la aplicación final. Bien se podría decir que la selección de
un método de desfusificacion apropiado se compara con la selección de las variables lingüísticas
del sistema que se quiere controlar, es decir, dependen mucho de la experiencia personal del
Ingeniero de Control sobre el problema en cuestión.

-54-
5. Metodología a seguir.
El primer paso consiste en realizar una revisión bibliográfica (Incluyendo Internet) para
ubicar toda la información en cuanto a lógica difusa, proceso SAGD, inyección continua de
vapor, inyección alternada de vapor, métodos de simulación del proceso SAGD, simuladores y
emuladores de estructuras difusas, todo esto con el objeto de definir los parámetros y condiciones
dentro de los cuales se implementará el trabajo.
Se desarrollará a continuación un modelo matemático sencillo del pozo SAGD utilizando
para ello las ecuaciones de Butler que describen el comportamiento de esta tecnología en un
yacimiento homogéneo. Una vez logrado el modelo en cuanto a software, se procederá a realizar
un ajuste de comportamiento en función de las variables medidas del proceso como son las
presiones, temperaturas y flujos del vapor inyectado tanto en sección anular como en tubería del
pozo inyector, además de la presión y temperatura del crudo producido por el pozo productor,
todos estos valores son suministrados por la instrumentación de superficie y fondo actualmente
instalada en campo, y que se encuentra disponible en el sistema SCADA de la intranet PDVSA.
Las variables anteriormente nombradas deben ser “fusificadas”, es decir, deben ser
transformadas de valores del mundo real a valores lingüísticos. Las encargadas de este proceso
son las funciones de asociación, las cuales calculan el grado de validez o el grado de pertenencia
de cada término lingüístico en puntos de operación específicos del proceso. La fusificación es el
primer paso de acción en un sistema difuso el cual debe ser ejecutado para cada variable de
entrada. Una vez que las funciones de asociación de todos los términos de entrada han sido
definidos, el comportamiento de control viene a ser implementado por las reglas del sistema. Es
aquí donde la ingeniería del conocimiento a través de las variables lingüísticas de los sensores de
entrada define las acciones de control a tomar, para ello se apoya en reglas compuestas por una
precondición y una consecuencia, donde, la precondición puede estar formada por una variable

-55-
lingüística o más enlazadas por conjunciones lingüísticas tales como Y / O. Estas reglas también
son conocidas como reglas de inferencia difusa. Una vez que todas estas reglas han sido
evaluadas, el resultado de esta acción es por supuesto difuso, en este caso se utilizan nuevamente
las funciones de asociación pero en forma inversa para trasladar este valor difuso a un valor del
mundo numérico. El valor así generado será el de la variable o variables que deben ser
manipuladas para poder efectuar la acción de control, de manera particular para este caso
corresponderán con la posición de las válvulas de control que regulan tanto cantidad de vapor
suministrado a través del pozo inyector, como la cantidad de crudo que sale a través del pozo
productor.
Luego se relacionan el modelo ajustado de pozo SAGD con el controlador difuso
desarrollado para observar el comportamiento del sistema general así conformado al introducir
perturbaciones en las variables observadas, manipuladas y controladas para realizar los ajustes
que permitan “Entonar” o ajustar el controlador difuso.
Para finalizar se realizarán recomendaciones de equipos y programas computacionales
que permitan implementar en campo el controlador difuso mejorado.
-56-
6. Cronograma de actividades.
A continuación se describen los pasos que se consideran necesarios para el desarrollo
del trabajo de grado.
Ç Búsqueda en la Biblioteca de la Universidad Nacional Experimental del Táchira todo el
material referente a lógica difusa y manejo de vapor (Termodinámica).
Ç Búsqueda en la Biblioteca técnica de occidente (BITOC) ubicada en el edificio PDVSA
Exploración & Producción 5 de Julio Maracaibo, todo el material referente a pozos
horizontales, inyección continua y alternada de vapor, pozos SAGD y metodología de
simulación SAGD.
Ç Búsqueda en Internet de información sobre lógica difusa, pozos SAGD, recuperación
térmica de crudos y arenas bituminosas.
Ç Selección y comprensión del material obtenido.
Ç Observación de características de los diferentes programas computacionales de
procesamiento matemático para desarrollar modelo de pozo SAGD.
Ç Programación de las ecuaciones suministradas por Butler y ajuste del modelo matemático
resultante con la información de pozos SAGD implementados en campo.
Ç Habilitación de variables que permitan la introducción de perturbaciones en el modelo
ajustado.

-57-
Ç Desarrollo de las reglas de inferencia difusa a partir del comportamiento del modelo
ajustado para poder desarrollar acciones de control.
Ç Selección del software de procesamiento matemático para implementar el controlador
difuso que ejecutará las acciones de control.
Ç Inter relación el modelo ajustado de un pozo SAGD y el controlador difuso (Todo a nivel
de software) con objeto de formar un sistema de simulación de comportamiento de pozos
SAGD.
Ç Introducción de perturbaciones y alteraciones en las variables del sistema de
comportamiento SAGD ha objeto de producir e implementar mejoras en el controlador
difuso.
Ç Recomendaciones sobre las caracteristicas que deben reunir equipos y programas
computacionales que permitirán implementar en campo el controlador difuso mejorado.
En la siguiente página se muestra el cronograma de actividades.

-58-
Tabla 6.1, Cronograma de actividades.
Actividad Tiempo Fecha
Búsqueda de información en Biblioteca U.N.E.T. 1 Semana 25-11-00
Búsqueda de información en BITOC 5 de Julio 1 Semana 02-12-00
Búsqueda de información en Internet 1 Semana 09-12-00
Selección y comprension del material obtenido 4 Semanas 16-12-00
Observación de características de programas computacionales 1 Semanas 15-01-01
Programación de las ecuaciones de Butler y ajuste del modelo 3 Semanas 22-01-01
matemático resultante con la información de pozos.
Habilitación de variables para introducir perturbaciones. 1 Semana 12-02-01
Construcción de las reglas de inferencia difusa a partir del 4 Semanas 19-02-01
comportamiento del modelo ajustado.
Selección del software para implementar el controlador difuso que 1 Semanas 19-03-01
ejecutara las acciones de control.
Inter relación el modelo de pozo SAGD y el controlador difuso para 2 Semanas 26-03-01
formar un sistema de simulación global.
Introducción de perturbaciones y alteraciones en las variables del 2 Semanas 09-04-01
sistema para mejorar el controlador difuso.
Preselección de equipos y programas computacionales que permitirán 2 Semanas 23-04-01
implementar en campo el controlador difuso.
Solución de imprevistos 2 Semanas 07-05-01
21-05-01
Total de tiempo 25 Semanas
-59-
7. Factibilidad Técnica y Económica.
Motivado a que se está utilizando la infraestructura de Petróleos De Venezuela S.A. para
desarrollar el presente trabajo de grado, el cual se enfoca como una aplicación en campo a
futuro, se asegura la factibilidad técnica y económica del mismo, ya que queda circunscrita en los
proyectos de investigación de dicha empresa.

-60-
8. Materiales y equipos a utilizar.
A continuacion se indican los posibles materiales, herramientas y dispositivos a utilizar
para el desarrollo del trabajo de grado.
Ç PC o LapTop con sistema operativo de entorno gráfico.
Ç Programas computacionales para procesamiento matemático y simulación.
Ç Acceso a la base de datos del sistema SCADA PDVSA.
Ç Visitas a pozos SAGD operativos en campo.
Ç Entrevistas a personal operador y supervisor de pozos SAGD.
Ç Material bibliográfico sobre lo relacionado con la recuperación térmica de crudos
pesados y extra pesados.
-61-
9. Referencias Bibliográficas.
Alvarado Douglas, “Recuperacion Térmica de Petroleo”, LUZ, 1993.
Aguilera Reinaldo, “Horizontal Wells”, Prentice Hall, 1994.
Bezdek James, Sankar K. Pal, “Fuzzy Models For Pattern Recognition”, IEEE press, Neural
Network Council, Sponsor, pp. 1 - 45, 1996.
Butler Roger, “Horizontal Wells for the recovery of Oil, Gas and Bitumen”, SPE, 1994.
Butler Roger, “Theretical and Physical modeling of SAGD Process”, Aostra, 1991.
de Buda Peter, “Numerical simulation of Steam Assisted Gravity Drainage to horizontal Wells”,
Alberta, 1991.
George Klir, “Fuzzy Sets, Uncertainty And Information”, McGraw-Hill, 1994.
Harris Jenkins., “Aspects Of Fuzzy Logic And Neural Nets”, Limusa Wiley, 1996.
Zadeh L.A., “Fuzzy Sets”, IEEE Transactions on Information and Control, Vol 8, pp. 338 - 352,
1965.
Zimmerman H.J., “Fuzzy Set, Theory And Its Applications”, Prentice Hall, 1992.