Material de consulta: Problemas de matemáticas, Modelación y Optimización
90
Material de consulta: Miscelánea de problemas matemáticos, problemas de optimización, modelación y GeoGebra Juan Carlos Ponce Campuzano c [email protected] UQ 28 de mayo de 2014 1
-
Upload
juancarlos-ponce -
Category
Documents
-
view
2.305 -
download
0
description
Problemas diversos de matemáticas, modelación y análisis
Transcript of Material de consulta: Problemas de matemáticas, Modelación y Optimización

Material de consulta:Miscelánea de problemas matemáticos,
problemas de optimización,modelación y GeoGebra
Juan Carlos Ponce Campuzano c©
UQ
28 de mayo de 2014
1


La computadora puede servir como una herramienta para complementar el pensamiento ma-temático avanzado de varias maneras. [...] En la educación se puede usar para [...] ayudar alos estudiantes a conceptualizar y construir por ellos mismos las matemáticas que ya han sidoformuladas por otros.
Ed Dubinsky y David Tall [8, p. 231]
3


Índice
1. Introducción 9
1.1. La tecnología para la enseñanza y el aprendizaje de las matemáticas . . . . . 9
2. ¿Qué son las matemáticas? 13
2.1. Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2. Matemáticas en Movimiento . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.3. La naturaleza de las matemáticas . . . . . . . . . . . . . . . . . . . . . . . . 15
2.4. Comentarios finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3. Miscelánea de Problemas I 19
3.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3.3. Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.4. Problema 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.5. Problema 5 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.6. Problema 6 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
3.7. Problema 7 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
4. Problemas de optimización 25
4.1. El problema de la caja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.2. El problema del cono . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.3. Problema de la recta que pasa por un punto fijo . . . . . . . . . . . . . . . . 28
5. Miscelánea de Problemas II 31
5.1. Problema 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
5.2. Problema 2 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
5.3. Problema 3 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
5.4. Problema 4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
5

6. Acerca del Cálculo 37
6.1. Breve reseña histórica del Cálculo . . . . . . . . . . . . . . . . . . . . . . . . 37
6.2. Comentarios . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
6.3. Distancia, Velocidad y Aceleración . . . . . . . . . . . . . . . . . . . . . . . 39
6.3.1. Applets de Geogebra: Representación del movimiento . . . . . . . . . 40
7. Acerca de los Elementos de Euclides 43
7.1. Un poco de historia de Euclides . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.2. Los Elementos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
7.3. Algunos contenidos de Los Elementos . . . . . . . . . . . . . . . . . . . . . 44
7.3.1. El pórtico axiomático . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7.3.2. Algunas proposiciones . . . . . . . . . . . . . . . . . . . . . . . . . . 45
7.4. Comentarios Finales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
8. Transformaciones lineales 51
8.1. Rotación y producto escala . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
9. Proyecciones ortográficas 53
9.1. Matrices de rotación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
9.2. Un caso: cuando el eje Z es igual a cero . . . . . . . . . . . . . . . . . . . . . 55
9.3. Ángulos de Euler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
10.Torre sobre la montaña 63
10.1. Planteamiento del problema . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
10.2. Solución al problema por medio de ecuaciones lineales . . . . . . . . . . . . . 64
11.Curvas paramétricas 67
11.1. Ejemplos de curvas paramétricas . . . . . . . . . . . . . . . . . . . . . . . . 67
11.1.1. Parábola . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
11.1.2. Circunferencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
11.1.3. Elipse . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
11.1.4. Cardioides y otras curvas . . . . . . . . . . . . . . . . . . . . . . . . . 68
6

11.1.5. Curva Pi . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
11.1.6. Curva paramétrica que representa a Pi . . . . . . . . . . . . . . . . . 71
11.1.7. Curva paramétrica que representa a Pi en 3D . . . . . . . . . . . . . 71
11.2. Espiral logarítmica y espiral en 3D . . . . . . . . . . . . . . . . . . . . . . . 73
11.2.1. Espiral logarítmica . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
11.2.2. Espiral en 3D . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
12.El Cubo, uno de los sólidos platónicos 77
12.1. Secuencia de construcción de cubo en 3D . . . . . . . . . . . . . . . . . . . . 78
13.Secuencias y Listas en GeoGebra 81
13.1. Secuencias de segmentos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
13.1.1. Mantel elástico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
13.1.2. Envolvente parabólica . . . . . . . . . . . . . . . . . . . . . . . . . . 82
13.1.3. Grafos o Enlaces . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
13.2. Superficies de revolución . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
13.2.1. Construcción de superficies de revolución con GeoGebra . . . . . . . 86
Referencias 89
7


1. Introducción
1.1. La tecnología para la enseñanza y el aprendizaje de las mate-máticas
En la actualidad, el uso de la tecnología en las escuelas ha modificado la manera de enseñarmatemáticas. La introducción de nuevas herramientas tecnológicas, como calculadoras gra-ficadoras y también computadoras personales, ha permitido nuevos acercamientos hacia lasmatemáticas.
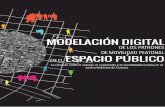
Figura 1: Gráfica de f(x, y) = sen(x, y)
La computadora, por ejemplo, puede servir como una herramienta para ayudar a los estudian-tes a conceptualizar y construir por ellos mismos matemáticas que ya han sido formuladaspor otros; además, puede servir también como complemento del pensamiento matemáticoavanzado porque sugiere posibles teoremas, sirve para buscar contra ejemplos, para reali-zar cálculos difíciles o engorrosos, e incluso, en algunos casos para probar teoremas queinvolucran un número finito de casos algorítmicos [8].
9

Gracias al trabajo en conjunto de matemáticos, educadores matemáticos y programadores,se han desarrollado diferentes tipos de software que pueden ser usados con fines didácticos.Entre ellos se encuentran los llamados Sistemas de Álgebra Computacional (CAS, del inglésComputer Algebraic System) los cuales son programas para computadora o calculadoraavanzada que nos permiten manipular expresiones algebraicas, graficar funciones y operarcon números. Algunos ejemplos de este tipo de programas son: Derive 6.0, Scientific WorkPlace 5.5, Mathematica 8.0, Maple, entre otros.
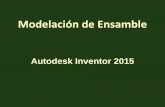
Figura 2: Gráfica de f(x, y) = x2 − y2
Es bien reconocido que los CAS ofrecen la posibilidad de reducir una gran cantidad decálculos engorrosos y repetitivos, lo cual permite dedicar mayor tiempo a aspectos másinteresantes de la materia. Asimismo, existen diversas investigaciones al respecto del uso delCAS para la enseñanza y el aprendizaje de las matemáticas, las cuales muestran evidenciade que los estudiantes que usan los CAS obtienen grandes beneficios para abordar problemasespecíficos y además, mejora potencialmente su aprendizaje. Por tal motivo, la formación ycapacitación de los profesores de matemáticas requiere de procesos continuos de actualizaciónpara fortalecer no sólo los conocimientos matemáticos sino también para conocer las nuevaspropuestas tecnológicas que surgen día a día.
Por otra parte, el desarrollo de diversos programas libres de matemáticas (como GeoGebra1
por ejemplo), ha permitido el acceso al público en general a los CAS. Además, también sepueden encontrar fácilmente en internet, programas o sitios de matemáticas de acceso librea todo público, como por ejemplo el sitio Wolfram Alpha2 (ver Figura 4). Los anteriorespueden ser utilizados para la enseñanza de diversos temas de matemáticas desde geometría,cálculo, probabilidad, álgebra, programación, entre otros muchos temas.
1Sitio web: http://www.geogebra.org/cms/es/2Sitio web: http://www.wolframalpha.com/
10

Figura 3: Ejemplo de GeoGebra
Figura 4: Ejemplo del sitio de Wolfram Alpha para resolver sen(x, y) = 0
11

Ciertamente, el uso de la las nuevas herramientas tecnológicas y el acceso a internet nospermiten tener una aproximación a las matemáticas y a su enseñanza desde otro punto devista. Sin embargo, debemos ser conscientes de que no podemos utilizar la tecnología comouna caja negra la cual nos permitiría resolver cualquier problema. Como profesores debemostener un conocimiento adecuado, dependiendo de las actividades que se lleven a cabo, delcomportamiento de los programas de matemáticas que utilizamos en el aula para comprenderlos resultados por nosotros mismos y así, de esta manera, alentar a los estudiantes a ser másreflexivos con el uso de la tecnología.
Otros sitios de interés con actividades, interactivos y temas diversos para la enseñanza y elaprendizaje de las matemáticas son los siguientes:
Cut The Knot (USA): http://www.cut-the-knot.org/
The On-Line Encyclopedia of Integer Sequences (USA): http://oeis.org/
Geogebrando (España): http://geogebreando.blogspot.mx/
Geometría Dinámica (México): http://geometriadinamica.org/
Proyecto Descartes (España): http://recursostic.educacion.es/descartes/web/
12

2. ¿Qué son las matemáticas?
2.1. Introducción
¿Qué son las matemáticas? Haga esta pregunta a varias personas elegidas al azar y es proba-ble que reciba la respuesta “Las matemáticas son el estudio de los números”. Si usted insistepreguntando qué tipo de estudio quieren decir, es posible que pueda inducirlos a responder:“Es la ciencia de los números”. Si consulta también el Diccionario de la Lengua Española,puede encontrar una respuesta similar, aunque más precisa:
matemática.(Del lat. mathematıca, y este del gr. τα µαθηµατικα, der. de µαθηµα, conocimiento).1. f. Ciencia deductiva que estudia las propiedades de los entes abstractos, como núme-ros, figuras geométricas o símbolos, y sus relaciones [17].
Con esto, usted habrá obtenido una descripción de las matemáticas que dejó de ser precisadesde hace unos dos mil quinientos años atrás. Las matemáticas han sido, desde épocas anti-guas, una actividad floreciente en todo el mundo que han permeado en un grado considerableen distintos ámbitos de la vida humana y en general de la sociedad.
De hecho, la respuesta a la pregunta “¿Qué son las matemáticas?” ha cambiado varias vecesdurante el curso de la historia. En la antigüedad, hasta el año 500 a. C. (más o menos),las matemáticas eran de hecho el estudio de los números. Este fue el período de las mate-máticas egipcias y babilónicas. En esas civilizaciones antiguas, la matemática consistía casiexclusivamente de la aritmética práctica. Fue en gran parte utilitaria y se consideraba máscomo un manual basado en, quizá, una regla básica: Realizar tal y tal cosa a un número yobtendrá la respuesta.
El período que comprende alrededor del año 500 a. C. al 300 d. C. se considera como la épocade las matemáticas griegas. Los matemáticos de la antigua Grecia se ocuparon principalmen-te de los números y la geometría. De hecho, consideraron números de forma geométrica, comomedidas de longitud de segmentos, pero cuando se descubrió que había segmentos inconmen-surables (también llamados magnitudes inconmensurables), terminaron sus estudios acercadel número. Recordemos que dos segmentos son inconmensurables si no existe ningún otrosegmento que aplicarse a cada uno de ellos un número entero de veces, o dicho en otraspalabras, si el cociente de sus longitudes no puede expresarse por una fracción ordinaria (uncociente de números enteros). Para los griegos, con su énfasis en la geometría, las matemá-ticas eran básicamente el estudio de los números y la forma.
Se debe resaltar que fue a partir de los griegos cuando la matemática surgió como un área deestudio y dejó de ser una colección de técnicas para contabilizar, organizar, medir y contar.El interés de los griegos en matemáticas no sólo era utilitario, sino que consideraron a lasmatemáticas como una actividad intelectual que tiene elementos estéticos y religiosos. Tales
13

de Mileto (c. 624 a. C. - c. 546 a. C.), por ejemplo, introdujo la idea de que las afirmacionesde las matemáticas expresadas con precisión podían ser demostradas lógicamente por mediode un argumento formal. Esta innovación marcó el nacimiento del teorema, actualmentepiedra angular de las matemáticas. Para los griegos, este enfoque culminó con la publicaciónde los Elementos de Euclides (ca. 325 - ca. 265 a. C.), conocido por ser el libro más difundidode todos los tiempos después de la Biblia.
2.2. Matemáticas en Movimiento
No hubo cambios importantes en la naturaleza general de las matemáticas ni avances sig-nificativos hasta mediados del siglo XVII, cuando el físico, astrónomo y matemático inglésSir Isaac Newton (1642-1727) y el abogado, filósofo y matemático alemán Gottfried WilhelmLeibniz (1646-1716) desarrollaron el Cálculo de manera independiente. En esencia, el Cálculoes el estudio del movimiento y el cambio. Las matemáticas, previas al siglo XVII, habíansido en gran parte restringidas a las cuestiones estáticas de conteo, medición y descripciónde la forma. Con la introducción de técnicas para manejar el movimiento y el cambio, losmatemáticos comenzaron a estudiar el movimiento de los planetas y de los cuerpos que caensobre la tierra, el funcionamiento de la maquinaria, el flujo de los líquidos, la expansión de losgases, las fuerzas físicas, tales como el magnetismo y la electricidad, el vuelo, el crecimientode las plantas y los animales, la propagación de epidemias, la fluctuación de variables, entremuchas otras cosas más. Después de Newton y Leibniz, la matemática se convirtió en elestudio del número, la forma, el movimiento, el cambio, y el espacio.
La mayor parte del trabajo inicial que implica el Cálculo se ha dedicado al estudio de lafísica y, de hecho, muchos de los grandes matemáticos de la época también son consideradoscomo físicos. Pero a partir de mediados del siglo XVIII se produjo un creciente interés enla naturaleza de las matemáticas, no sólo sus aplicaciones, muchos matemáticos comenza-ron a tratar de comprender lo que había detrás del enorme poder que el Cálculo dio a lahumanidad. Aquí la tradición griega de la prueba formal volvió a entrar en ascenso, similara la matemática pura actualmente desarrollada. A finales del siglo XIX, las matemáticas sehabían convertido en el estudio del número, la forma, el movimiento, el cambio y el espacio,y de las herramientas matemáticas que se utilizan en este estudio.
El incremento de la actividad matemática que tuvo lugar en el siglo XX fue dramática. Enel año 1900, podemos decir que el conocimiento matemático del mundo entero se había re-copilado en un número finito de libros (unos 10000 libros, tal vez). Hoy tal vez se necesitaríaun billón de volúmenes para contener todas las matemáticas conocidas. Afortunadamente,con el desarrollo de la tecnología, ahora tenemos los libros digitales que pueden ser almace-nados en espacios reducidos y además son de fácil acceso para todo mundo, lo cual implicala creación de bibliotecas digitales de libros, ya sean antiguos o escritos recientemente.
El extraordinario crecimiento de las matemáticas no sólo ha sido un fomento comenzado en
14

la antigüedad, de hecho, han surgido muchas nuevas ramas de las matemáticas. Hasta 1900,la matemática puede considerarse, razonablemente, como un conjunto pequeño de temasdistintos: Teoría de Números, Álgebra, Geometría Clásica y Analítica, Cálculo Diferencia eIntegral, Probabilidad, etc. Hoy en día existen un número enorme de ramas:
Álgebra Abstracta,
Lógica,
Combinatoria,
Procesos Estocásticos,
Variable Compleja,
Ecuaciones Diferenciales,
Teoría de Continuos
Cálculo de Variaciones,
. . . y la lista continúa.
Algunas ramas, como el Álgebra y la Topología, se han dividido en varios subcampos mien-tras que otros, tales como la Teoría de Categorías o la Teoría de Sistemas Dinámicos, sonprácticamente nuevas áreas de estudio [6].
2.3. La naturaleza de las matemáticas
Ante este enorme crecimiento en la actividad matemática, por un tiempo parecía que laúnica respuesta sencilla a la pregunta “¿Qué son las matemáticas?” era decir algo como:Es lo que los matemáticos hacen para ganarse la vida. Quizá sería mejor describir a lasmatemáticas por el proceso que se utiliza para estudiar algo y no tanto por el objeto deestudio, es decir, debemos considerar la metodología utilizada, lo cual conlleva al análisisde su naturaleza. Dentro de la filosofía de las matemáticas han surgido varias corrientesque tratan de explicar la naturaleza de las matemáticas, algunas de las más famosas son: elLogicismo, el Formalismo y el Intuicionismo3. A grandes rasgos:
El Logicismo es una de las escuelas de pensamiento en la filosofía de la mate-mática, propone la teoría que la matemática es una extensión de la lógica y, porlo tanto, parte o toda la matemática es reducible reducible a la lógica. Bertrand
3Para más detalles consultar [13] y [18]
15

Russell y Alfred North Whitehead defendieron esta teoría cuyo padre fue GottlobFrege. El logicismo fue clave en el desarrollo de la filosofía analítica en el sigloXX.El Formalismo es una posición en filosofía de las matemáticas que consideraque el lenguaje matemático puede reducirse a operar con signos. Los postulados(o reglas) son arbitrarios, solo están sujetos a una condición esencial, que es lacompatiblidad. Es decir, pueden construirse tantas disciplinas matemáticas comosistemas compatibles de postulados. Su autor más importante es David Hilbert.El Intuicionismo es una aproximación a las matemáticas a partir de una vistamental constructiva humana. Todo objeto matemático es considerado productode la mente humana, y, por ende, la existencia de un objeto es equivalente a laposibilidad de su construcción. Por consiguiente, el Intuicionismo es una variedaddel Constructivismo matemático, aunque no son el mismo concepto.
Desde otro punto de vista, de acuerdo con el matemático inglés Keith J. Devlin (1947- )[5], en los últimos treinta años ha surgido una definición de las matemáticas en la que lamayoría de los matemáticos están de acuerdo: La matemática es la ciencia de patrones. Deacuerdo con esta idea lo que el matemático hace es examinar patrones numéricos, patronesde formas, patrones de movimiento, patrones de comportamiento, patrones elecciones en unapoblación, los patrones de eventos al azar, entre muchos otros. Estos patrones pueden serreales o imaginarios, visuales o mentales, estáticos o dinámicos, cualitativos o cuantitativos,puramente utilitarios o simplemente de interés recreativo. Pueden surgir del mundo que nosrodea, desde las profundidades del espacio y el tiempo, o desde el funcionamiento interno dela mente humana.
Diferentes tipos de patrones dan lugar a las diferentes ramas de las matemáticas. Por ejemplo:
La Aritmética y Teoría de números estudian patrones de números y conteo.
La Geometría estudia patrones de forma.
El Cálculo nos permite manejar patrones de movimiento.
La Lógica estudia patrones de razonamiento.
La Teoría de Probabilidad trata con patrones de azar.
La Topología estudia de patrones de cercanía y posición.
Uno de los aspectos de la matemática moderna, que es obvio hasta para el observadorcasual, es el uso de la notación abstracta: las expresiones algebraicas, fórmulas complicadasde aspecto y diagramas geométricos. El hecho de que el matemático confié plenamente enla notación abstracta, es un reflejo de la naturaleza abstracta de los modelos que estudia.
16

Diferentes aspectos de la realidad requieren diferentes formas de descripción. Por ejemplo,dibujar un mapa es la forma más adecuada para estudiar la disposición de la tierra o paradescribir a alguien cómo encontrar su camino en una ciudad extraña. En este caso, el texto esmucho menos apropiado. Análogamente, diagramas de planos son la manera más apropiadapara especificar la construcción de un edificio. La notación musical es la manera más adecuadapara comunicar la música e incluso de poder tocar una pieza musical completa.
En matemáticas, los conceptos, procedimientos y la notación son los medios más apropiadospara la descripción y análisis varios tipos de patrones y estructuras abstractas. Por ejemplo,la notación simbólica del álgebra es el medio más adecuado para describir y analizar laspropiedades generales de comportamiento de la suma y la multiplicación.
2.4. Comentarios finales
No es una tarea simple tratar de contestar la pregunta “¿Qué son las matemáticas?” Larazón es porque la respuesta varía dependiendo de la perspectiva desde donde se mire. En lopersonal, las matemáticas son el producto de un proceso histórico-social de la mente humana.Quizá en los próximos 100 años se propondrá una nueva perspectiva acerca de la naturalezade las matemáticas debido al desarrollo de las tecnologías computacionales. En los últimos50 años, el desarrollo de las computadoras ha evolucionado drásticamente de tal manera queahora contamos con computadoras de bolsillo (las famosas tabletas) para el uso cotidiano deactividades diversas, desde comprar un boleto electrónico, hasta comunicarnos con alguiendel otro lado del mundo. Las computadoras, en las manos de un usuario experto, puedenutilizarse para “realizar” matemática y el resultado se puede mostrar en una forma visual enla pantalla para que todos lo aprecien. Aunque sólo una parte relativamente pequeña de lamatemática se presta para tales propósitos, ahora es posible comunicar a un gran número depersonas al menos algo de la belleza y la armonía que el matemático “observa” y experimentacuando hace matemáticas.
17


3. Miscelánea de Problemas I
3.1. Problema 1
Si√
11 = 3.31662479 . . . Calcula una aproximación de
1√11
con nueve cifras decimales, sin usar calculadora.
Respuesta.
1√11− 1
=1√
11− 1
√11 + 1√11 + 1
=
√11 + 1√11− 1
=4.31662479 . . .
10= 0.431442479 . . .
3.2. Problema 2
Un ciclista de alto rendimiento tarda 7 horas y media en recorrer un trayecto de 90 km, auna velocidad constante.
1. ¿Cuál es la velocidad del ciclista, expresado en km/h?
2. ¿Cuánto tiempo tarda en recorrer 138 km?
3. ¿Cuánto tiempo tardaría en recorrer 93.6 km, si su velocidad constante es de 5.2 km/h?
Respuestas.
1) El ciclista tarda 7 horas y media en recorrer un trayecto de 90 km. La velocidad esdistancia sobre tiempo:
v =d
t
Por lo tanto, tenemos
v =90km7.5hr
= 12km/hr
19

2) Como la velocidad es constante, el inciso anterior indica que el ciclista recorre 12 km porcada hora. Esto quiere decir que en 2 hr. recorrerá 24 km. En 3 hr. recorrerá 36 km. Estoimplica una relación de proporcionalidad. En este caso, se puede aplicar una regla de tres.Es decir
138 km es a x hr. como 12 km es a 1 hr
Expresado matemáticamente tenemos
138
x=
12
1
Despejando a x obtenemos
x =138
12= 11.5
Por lo tanto, tardará 11.5 hr o 11 hr y media.
3) Ahora, si la velocidad constante es de 5.2 km/hr, entonces el tiempo que tardará enrecorrer 93.6 km es:
t =d
v
=93.6km
5.2km/hr= 18hr
3.3. Problema 3
Sin utilizar calculadora, encuentra el valor de la expresión
A = (83, 875, 683, 470)2 − (83, 875, 683, 469× 83, 875, 683, 471)
Respuesta.
Si n = 83, 875, 683, 470. Entonces
A = n2 − ((n− 1)× (n+ 1)) = n2 − (n2 − 1) = 1
3.4. Problema 4
Observa la siguiente sucesión de números:
1, 5, 9, 13, 17, . . .
20

1. ¿Qué término está en la posición número 1010?
2. Determina una fórmula general para encontrar el término en la posición n-ésima. Eltérmino en la posición número 1010 es 4037. El término n-ésimo es , o lo que es lomismo
El término n-ésimo está dado por la fórmula 4(n − 1) + 1 o lo que es igual 4n − 3. Por lotanto, el término que está en la posición 1010 es:
4(1010)− 3 = 4040− 3 = 4037
3.5. Problema 5
Sobre el diámetro de un círculo se construyen dos semicírculos como muestra la Figura 5. Siel diámetro del círculo está dividido en una razón de 3
4. Establece la razón del área blanca
respecto al área sombreada.
Figura 5:
Respuesta.
Sea r1 el radio de la circunferencia pequeña y r2 el radio de la circunferencia grande. Entoncesr1r2
=3
4
El área total del círculo entero se puede expresar en términos de las dos circunferenciasinteriores. Es decir
At = π(r1 + r2)2
Las áreas de las regiones blanca y sombreada están dadas por las siguientes expresiones
Ac = π(r21 + r1r2) y AC = π(r22 + r1r2)
21

respectivamente. Entonces, al hacer la razón entre ambas áreas tenemos
Ac
AC
=π(r21 + r1r2)
π(r22 + r1r2)=r1r2
=3
4
Por lo tanto, la razón del área blanca respecto al área sombreada es 34.
3.6. Problema 6
En un cuadrado de lado 3 se cortan triángulos rectángulos isósceles en cada una de sus cuatroesquinas, de tal manera que se forma un octágono regular al interior del cuadrado (Figura6). Demostrar que el área de este octágono se puede expresar como 18
√2− 18.
Figura 6:
Respuesta.
Asignemos x al valor de los catetos de los triángulos que se forman y L el valor de lahipotenusa (que también corresponde al lado del polígono). Entonces, por el teorema depitágoras, tenemos
L =√
2x
Sabemos también que el lado del cuadrado mide 3. Entonces tenemos la siguiente expresión
2x+ L = 3.
22

Sustituyendo el valor de L obtenemos
2x+ (√
2x) = 3
Al despejar a x queda
x =3
2 +√
2
De aquí que
L =3√
2
2 +√
2
El área del octágono se obtiene multiplicando el perímetro por el apotema entre 2. Esto lopodemos escribir de la siguiente manera
A =P · a
2.
En este caso el apotema a mide 3/2, porque el lado del cuadrado mide 3.
Por lo tanto tenemos
A =P · a
2=
8(
3√2
2+√2
) (32
)2
Que al simplificar queda 18√
2− 18.
3.7. Problema 7
La siguiente tabla muestra algunos valores de la tarifa de un taxi de acuerdo a la distanciarecorrida.
Distancia (km) 1 3 6Tarifa (pesos) 12.3 21.3 34.8
1. Elabora una gráfica que representa la relación entre ambas variables, considerando ladistancia en el eje horizontal y la tarifa en el eje vertical.
2. Aproxima los datos por una función lineal, esto es, sustituye valores de la tabla en laecuación f(x) = a+bx para hacer un sistema de ecuaciones con dos variables. Resuelveel sistema y estima la tarifa que se debe pagar si se han recorrido 15.3 km, de acuerdoal modelo.
23

Respuestas.
1) Una representación gráfica puede ser como la siguiente:
Figura 7:
2) Al sustituir los valores de x en la función f(x) = a + bx, se obtienen las siguientesecuaciones
a+ b = 12.3a+ 3b = 21.3a+ 6b = 34.8
Se pueden considerar cualquier par de ecuaciones para hacer un sistema de ecuaciones dedos incógnitas.
Al resolver cualquiera de estos sistemas, se tiene que: a = 7.8 y b = 4.5. Por lo tanto, latarifa será de 76.65 pesos.
24

4. Problemas de optimización
4.1. El problema de la caja
Un problema clásico de optimización es el famoso problema de la caja construida a partirde una lámina rectangular o cuadrada. Una de sus tantas versiones es la siguiente:
Se necesitan construir cajas de cartón sin tapa de diferentes capacidades. Para su construc-ción se utilizan láminas que tienen la forma de un cuadrado de lado 10 cm. Si de cada esquinase le cortan cuadrados de x cm de lado:
1. ¿Cuáles deben ser las dimensiones de la caja?
2. Obtener una función V (x) que relacione a la caja con su volumen.
3. Obtener el dominio de V (x).
4. Realizar un bosquejo de su gráfica.
5. ¿Para qué valor de la variable x se obtiene un volumen máximo (o mínimo en su caso)?
El siguiente applet, realizado con GeoGebra, permite dar una idea intuitiva de la relaciónentre el volumen de la caja y la variable x, cuando esta última varía:
http://www.geogebratube.org/student/m32563
Figura 8: Modelación del problema de la caja
25

No es difícil observar que las dimensiones de la caja son Largo: 10 − 2x, Ancho: 10 − 2x yAlto: x.
De esta manera, la función que relaciona a la caja con su volumen es
V (x) = x(10− 2x)(10− 2x).
V (x) no está definida para x = 0 ni x = 5 porque no tiene sentido para estos casos. Dehecho, el dominio de V (x) es el intervalo abierto (0, 5).
Con la ayuda del applet, se puede observar que se obtiene un volumen máximo (aprox.) de74.05 centímetros cúbicos cuando x se aproxima al valor de 1.7.
La solución general se obtiene calculando la derivada de la función V (x). Esto es
V ′(x) = 12x2 − 80x+ 100.
Esta función se iguala a cero para encontrar los puntos críticos. Es decir
V ′(x) = 12x2 − 80x+ 100 = 0.
Los valores donde la derivada V ′(x) se hace cero son x1 = 5 y x2 = 5/3. El valor de x1 = 5se descarta, por como está definido el dominio de V (x).
Para verificar que es un máximo, se calcula la segunda derivada de V (x). Esto es
V ′′(x) = 24x− 80.
Ahora, se sustituye el valor de x2 = 5/3 en V ′′(x). De lo cual se obtiene que
V ′′(5/3) = 24(5/3)− 80 = −40
Este último valor es negativo. Por lo tanto, cuando x es igual a 5/3 (ó 1.666 . . . aprox.)el volumen de la caja alcanza un valor máximo. Al sustituir 5
3en V (x), obtenemos 74.07
(aprox).
4.2. El problema del cono
Cálculo del volumen de un cilindro inscrito en un cono. Se inscribe un cilindro en un conorecto de altura h = 5 y radio de la base r = 1. ¿Cuál es el máximo volumen que puede tenerese cilindro?
Si el cilindro tiene altura h′ y radio r2, entonces el volumen del cilindro está dado por lafórmula:
V (h′, r2) = πh′r2.
26

Como se puede apreciar, esta expresión depende de dos variables (h′, r2).
Es posible establecer una relación entre alguna de estas variables y la variación del volumendel cilindro. En el siguiente applet, realizado con GeoGebra, se puede apreciar dicha relación.En este caso se estableció la relación entre el radio r y el volumen:
http://www.geogebratube.org/student/m33748
Figura 9: Modelación del problema del cilindro inscrito en un cono
Preguntas:
1. ¿Cuál es la expresión algebraica (o función) que representa la curva que se muestra en larepresentación gráfica del applet?
2. ¿Cuál es el máximo volumen que puede tener el cilindro?
3. Existe otra manera de establecer la relación entre la altura y el volumen del cilindro. ¿Cuáles la expresión algebraica (o función) que representa dicha relación?
4. ¿Qué sucede cuando se modifican la altura y el radio del cono?
27

4.3. Problema de la recta que pasa por un punto fijo
Una recta variable que pasa por el punto D = (1, 2) corta al eje x en el punto A = (a, 0) y aleje y en el punto B = (0, b). Hallar el área mínima de los triángulos ∆AOB con la condiciónde que a > 1 y b > 2.
Figura 10:
Respuesta:
Por una parte, la recta que pasa por los puntos A y D tiene como pendiente
m =2
a− 1.
Esta misma recta pasa por los puntos B y D. En este caso la pendiente es
m = b− 2.
Estamos hablando de la misma recta, por lo tanto
b− 2 =2
a− 1.
Si despejamos b obtenemos
b =2a
a− 1.
Por otra parte, la función que relaciona las variables a, b con el área del triángulo es
f(a, b) =ab
2
28

con a > 1 y b > 2. Para obtener una función con una sola variable sustituimos el valor de b.Es decir
g(a) =a(
2aa−1
)2
g(a) =a2
a− 1
Esta función está definida para todo a en el intervalo abierto (1,∞).
Para buscar mínimos o máximos derivamos la función g(a), después igualamos la derivadaa cero para encontrar los valores donde se anula. Es decir
g′(a) =2a(a− 1)− a2
(a− 1)2
g′(a) =a(a− 2)
(a− 1)2
Hacemos g′(a) = 0. Entonces
a(a− 2)
(a− 1)2= 0
Como a > 1, tenemos que (a − 1)2 > 0. Por lo que a(a − 2) = 0. De esta manera, a = 0 óa = 2. El caso a = 0 no puede ser por las condiciones iniciales del problema. El único casoposible es a = 2.
Para verificar que a = 2 es un mínimo o máximo, sustituimos este valor en la segundaderivada de la función g(a). La segunda derivada es
g′′(a) =(a− 1)2(2a− 2)− a(a− 2)(2a− 2)
(a− 1)4
g′′(a) =2
(a− 1)3
Al sustituir obtenemosg′′(2) =
2
(2− 1)3= 2.
Como este valor es positivo, entonces la función g(a) tiene un mínimo en a = 2.
Por último, dado que b = 2aa−1 , entonces al sustituir el valor de a obtenemos
b =2(2)
2− 1= 4.
Por lo tanto, las dimensiones del triángulo son a = 2 y b = 4 con una área mínima de 4.
29

Figura 11: Diagrama de triángulo de área mínima y función g(a) = a2
a−1 .
Nota: También es posible encontrar una función en términos de la variable b. En este casose sigue el mismo procedimiento.
Ver Applet de GeoGebra:
http://www.geogebratube.org/student/m32808
30

5. Miscelánea de Problemas II
5.1. Problema 1
Sea ∆ABC un triángulo con lados 3, 4 y 5 (ver Figura 12). ¿Cuánto vale el radio del círculoinscrito en el triángulo?
Respuesta.
Sea O el centro y r el radio de círculo. Primero, desde el centro O trazamos los segmentosOF , OD y OE perpendiculares a AB, BC y AC; respectivamente. La longitud de cada unode estos segmentos es igual a r. Ahora, trazamos los segmentos OA, OB y OC, para formarlos triángulos ∆AOC, ∆AOB y ∆BOC (ver Figura 12).
Figura 12:
Sea AT el área del triángulo mayor ∆ABC. Esto es
AT =base · altura
2=
3 · 42
= 6.
En este caso consideramos como base AC y altura AB.
Por otra parte tenemos que el área de los triángulos ∆AOC, ∆AOB y ∆BOC es
A1 =3 · r
2, A2 =
4 · r2
y A3 =5 · r
2;
31

respectivamente. La suma de estas tres áreas es el área total AT . Es decir
A1 + A2 + A3 = AT .
Sustituyendo valores tenemos
A1 + A2 + A3 = AT
3 · r2
+4 · r
2+
5 · r2
= 6
r
2(3 + 4 + 5) = 6
r
2(12) = 6
6r = 6
r = 1
Por lo tanto el radio de círculo mide 1.
Nota: En un triángulo rectángulo cualquiera sucede que el radio de la circunferencia inscritacumple la siguiente relación:
r =a+ b− c
2donde a y b son los catetos y c es la hipotenusa. ¿Por qué? Este hecho se puede utilizartambién para resolver el problema.
5.2. Problema 2
Si a y b son números distintos tales que
a
b+a+ 10b
b+ 10a= 2
¿Cuánto vale ab?
Respuesta.
a
b+a+ 10b
b+ 10a= 2
a(b+ 10a) + b(a+ 10b)
b2 + 10ab= 2
ab+ 10a2 + ab+ 10b2 = 2b2 + 20ab
10a2 − 18ab+ 8b2 = 0
5a2 − 9ab+ 4b2 = 0
(a− b)(5a− 4b) = 0
32

Como a y b son diferentes, tenemos que a−b 6= 0. Por lo tanto 5a−4b = 0. Es decir, 5a = 4b.
Por lo tantoa
b=
4
5.
Nota: Este problema también se puede resolver por prueba y error, sustituyendo valores denúmeros enteros con la condición de que a y b sean diferentes. Este procedimiento puede sermuy tardado sin una calculadora a la mano. Quizá se podría tener suerte a los primeros tresintentos, pero eso sería una simple casualidad.
5.3. Problema 3
Considera la sucesión 3, 412, 6, 71
2, 9, . . .
1. El número 3 está en la posición 1, mientras que el número 712está en la posición 4.
¿En qué posición está el número 316.5?
2. ¿Qué número de la sucesión está en la posición 1024?
3. ¿Cuál es la fórmula general para obtener cualquier número de la sucesión?
Respuesta.
Inciso 3. La fórmula general se puede escribir de tres maneras distintas
3
2(n+ 1), 1
1
2(n+ 1), 1.5(n+ 1),
donde n es un número natural que indica la posición.
Esto se puede deducir de la siguiente manera:
En la sucesión 3, 412, 6, 71
2, 9, . . . podemos notar que a partir del segundo término, la
diferencia de cualquier término con su antecesor es una constante
41
2− 3 = 1
1
2
6− 41
2= 1
1
2
71
2− 6 = 1
1
2
9− 71
2= 1
1
2...
33

Nombremos de forma general esta sucesión
a1 = 3, a2 = 41
2, a3 = 6, a4 = 7
1
2, . . .
De esta manera, podemos escribir
a2 − a1 = 11
2
a3 − a2 = 11
2
a4 − a3 = 11
2
a5 − a4 = 11
2...
Esto se escribe brevemente comoan − an−1 = 1
1
2donde n es un número natural y se cumple la condición inicial a1 = 3. A esta fórmula se lellama relación de recurrencia. La condición a1 = 3 es importante debido a que si cambiamoseste valor, describiríamos otra sucesión; es decir, si a1 = 5, entonces tendríamos la sucesión5, 61
2, 8, 91
2, . . . la cual también satisface la relación.
Para encontrar el término general an, es decir, la solución de la relación de recurrencia,podemos hacer el siguiente procedimiento: Sumemos de forma vertical el arreglo
a2 − a1 = 11
2
a3 − a2 = 11
2
a4 − a3 = 11
2
a5 − a4 = 11
2...
an − an−1 = 33
2
Del lado izquierdo, da como resultado an − a1, debido a que es una suma telescópica y dellado derecho queda 11
2(n− 1).
Lo cual significa que
an − a1 = 11
2(n− 1).
34

Dado que a1 = 3, entonces
an − 3 = 11
2(n− 1)
an = 11
2(n− 1) + 3
an = 11
2n− 1
1
2+ 3
an = 11
2n+ 1
1
2
an = 11
2(n+ 1) =
3
2(n+ 1) = 1.5(n+ 1)
Donde an es el número que está en la posición n-ésima.
Sucesiones de este tipo se llaman progresiones artiméticas, debido a que la diferencia decualquier término (distinto del primero) y su predecesor es una constante, llamada diferenciaconstante.
Inciso 1. Para encontrar la posición del número 316.5 debemos despejar el valor de n en laexpresión:
3
2(n+ 1) = 316.5
Esto es
3
2(n+ 1) = 316.5
3
2n+
3
2= 316.5
3
2n = 316.5− 3
2= 316.5− 1.5
3
2n = 315
3n = 630
n = 210
Inciso 2. Para encontrar el número que está en la posición 1024 sustituimos el valor de n enla fórmula general 3
2(n+ 1). Es decir
3
2((1024) + 1) =
3
2(1025) =
3075
2= 1537.5 = 1537
1
2. (1)
35

5.4. Problema 4
Al efectuar las operaciones indicadas en la siguiente expresión:(22008 + 22006
22007 + 22005
)× 2008
Se obtiene un número de cuatro dígitos. ¿Cuál es la suma de los dígitos de este número?
Respuesta.
Sea 22008 = 2x. Entonces(22008 + 22006
22007 + 22005
)× 2008 =
(2x + 2x−2
2x−1 + 2x−3
)× 2008
=
(2x (1 + 2−2)
2x (2−1 + 2−3)
)× 2008
=
(1 + 2−2
2−1 + 2−3
)× 2008
=
(1 + 1
22
12
+ 123
)× 2008
=
(1 + 1
412
+ 18
)× 2008
=
( 5458
)× 2008
=
(8
4
)× 2008
= 2× 2008
= 4016
La suma de los dígitos es 4 + 0 + 1 + 6 = 11.
Nota: Este problema también es puede resolver de manera similar a la anterior, si suponemosx = 22008. ¿Por qué?
36

6. Acerca del CálculoEl verdadero método para pronosticar el futuro de las matemáticasestá basado en el estudio de su historia y de su estado actual.
Henri Poincaré
El historiador de las matemáticas Morris Kline considera al Cálculo, después de la geome-tría, como la creación más grande en todas las matemáticas ([14], p. 342). Generalmentese atribuye su invención principalmente a dos matemáticos del siglo XVII, el inglés IsaacNewton (1642-1727) y el alemán Gottfried Wilhelm Leibniz (1646-1716). Sin embargo, estaes una excesiva y absurda simplificación de los hechos. En realidad el Cálculo, tal y como loconocemos actualmente, es el producto de una larga evolución en la cual ciertamente estosdos personajes desempeñaron un papel decisivo [19].
En términos muy generales, el Cálculo llegó para resolver y unificar los problemas de cálculode áreas y volúmenes, el trazo de tangentes a curvas y la obtención de valores máximos ymínimos, proporcionando una metodología general para la solución de todos estos problemas;también permitió definir el concepto de continuidad y manejar procesos infinitos. Por estoúltimo, el Cálculo y sus derivaciones pronto encontraron múltiples aplicaciones y sirvieronpara modelar procesos en todos los ámbitos científicos, empezando por la física y las cienciasnaturales, hasta llegar a las ciencias sociales.
6.1. Breve reseña histórica del Cálculo
A grandes rasgos, podemos decir que el Cálculo inició desde épocas antiguas con los griegosquienes abordaron diferentes problemas matemáticos. En particular, estaban interesados porresolver dos problemas clásicos: uno era el cálculo de áreas y el otro era el trazo de tangentes.Diversos fueron los personajes helénicos que hicieron grandes contribuciones al respecto, entreellos, el más famoso fue Arquímedes (287 a. C. - 212 a. C) de Ciracusa, cuya obra no sólo esconsiderada como la culminación de las contribuciones de los griegos, además sigue siendoobjeto de admiración y estudio en la actualidad.
Fue hasta la primera mitad del siglo XVII, en que se renovó el interés por esos problemas yvarios matemáticos de distintas partes de Europa como Bonaventura Cavalieri (1598-1647),John Wallis (1616-1703), Pierre de Fermat (1601-1665), Gilles de Roberval (1602-1675) eIsaac Barrow (1630-1677), lograron avances que prepararon el camino para la obra de Leibnizy Newton.
En el siglo XVIII, denominado El siglo del Análisis Matemático, se dio la consolidación delCálculo y sus aplicaciones a las ciencias naturales, particularmente a la Mecánica. Con esedesarrollo, vino la especialización y el nacimiento de nuevas ramas de las matemáticas, talescomo: la Teoría de Ecuaciones Diferenciales, ordinarias y parciales, el Cálculo de Variaciones,
37

la Teoría de Series y la Geometría Diferencial. Las aplicaciones del análisis incluyen ahora laTeoría de Vibraciones, la Dinámica de Partículas, la Teoría de Cuerpos Rígidos, la Mecánicade Cuerpos Elásticos y Deformables y la Mecánica de Fluidos. A partir de entonces, sedistinguen las matemáticas puras de las matemáticas aplicadas.
Al finalizar el siglo XVIII, algunos matemáticos habían detectado diversas limitaciones eincongruencias en las bases sobre las que se había desarrollado hasta entonces el Cálculodiferencial e integral. Los trabajos de Jean D’Alembert (1717-1783) sobre la cuerda vibrantey de Joseph Fourier (1768-1830) sobre la Teoría Analítica del Calor, de 1807, remitían ala necesidad de considerar clases más amplias de funciones, como por ejemplo, funcionesrepresentables como series de potencias a la manera de Lagrange. En ese momento, emergela necesidad de aclarar las propiedades de continuidad y de integrabilidad de las funciones,así como las condiciones de convergencia para series de funciones.
Fue hasta el siglo XIX, con la construcción del sistema de números reales, del conceptogeneral de función real y del concepto de límite de una función; cuando se establecieron demanera rigurosa las bases fundamentales sobre las cuales descansa actualmente el Cálculo.Algunos de los personales notables que hicieron grandes contribuciones al respecto fueronAugustin Louis Cauchy (1789-1857), Bernhard F. Riemann (1826-1866), Karl Weierstrass(1815-1897), Richard Dedekind (1831-1916), entre otros [3], [12].
Finalmente, es necesario decir que el siglo XX registra dos nuevos avances en el desarrollo delanálisis: la integral de Lebesgue, debida al francés Henri Lebesgue (1875-1941), el Análisisno-Estándar, debido básicamente a Abraham Robinson (1918-1974) y la integral de Riemanngeneralizada, debida a los matemáticos Ralph Henstock (1923) y Jaroslav Kurzweil (paramayores informes al respecto consultar [4]).
6.2. Comentarios
Con base en la anterior reseña histórica, podemos afirmar que: La mayoría de los conceptosdel Cálculo han requerido de un largo proceso evolutivo de varios siglos.
Es por esta razón que no podemos esperar que los estudiantes logren comprenderlos demanera inmediata en un corto periodo de tiempo, como son por lo general los cursos deCálculo. Pero sí podemos desarrollar paulatinamente en los estudiantes la madurez necesariapara alcanzar ese objetivo.
Es cierto que los grandes nombres en la creación del cálculo son, naturalmente, Isaac Newtony Leibniz. Sin embargo, Descartes, Fermat, Cavalieri, Pascal, Roverbal, Barrow y al menosuna docena más de conocidos matemáticos realizaron contribuciones significativas antes queellos. Sin embargo, ni Newton ni Leibniz pudieron formular correctamente los conceptosbásicos del Cálculo.
38

Es un hecho significativo que los fundamentos lógicos del sistema numérico, el álgebra yel análisis no fuesen desarrollados hasta finales del siglo XIX. En otras palabras, durantelos siglos en los que se edificaron las ramas más importantes de las matemáticas, como elCálculo, no había un desarrollo lógico para la mayor parte de ellas. Al parecer, la intuiciónde los grandes hombres impera más que su lógica.
¿Qué podemos deducir de la historia del Cálculo? Morris Kline [16] responde:
Parece claro que primeramente se aceptaron y utilizaron los conceptos quetenían mayor significado intuitivo: todos los números, las fracciones y los con-ceptos geométricos. Los menos intuitivos, los números irracionales, los númerosnegativos, los números complejos, el uso de letras como coeficientes generales ylos conceptos del cálculo, necesitaron de muchos siglos para su creación o parasu aceptación. Además, cuando fueron aceptados no fue la lógica la que indujoa ello a los matemáticos, sino los argumentos por analogía, el significado físicode algunos conceptos y la obtención de resultados científicos correctos. En otraspalabras, fue la evidencia intuitiva lo que indujo a los matemáticos a aceptarlos.La lógica siempre ha venido mucho después de la invención, y, evidentemente,ha sido más difícil de alcanzar. Así pues, la historia de la matemática sugiere,aunque no lo pruebe, que es más difícil el planteamiento lógico. (p. 47)
Por lo tanto, dentro de un ambiente donde se promueva la intuición se podría dar pautapara que los estudiantes logren desarrollar habilidades para comprender con profundidadconceptos del Cálculo. Por esto último, es importante que nosotros como profesores, tengamosal menos un conocimiento básico de la historia de las matemáticas, de la materia o materiasque impartimos, para lograr que los estudiantes no solo estén enterados de hechos históricossino también para desarrollar la intuición y finalmente lograr una mejor comprensión de losconceptos.
6.3. Distancia, Velocidad y Aceleración
Desde un punto de vista físico, el Cálculo se puede definir como sigue:
Cálculo Diferencial: Método para encontrar la velocidad de un movimiento cuando seconoce la distancia recorrida en un tiempo dado.
Cálculo Integral: Método para encontrar la distancia recorrida cuando se conoce la velo-cidad.
Intuitivamente:
Para encontrar la distancia recorrida de un objeto, cuando se conoce la velocidad, se
39

recurre al cálculo integral, es decir, se debe calcular el área bajo la curva que representala dependencia de la velocidad respecto del tiempo.
Para encontrar la velocidad de un movimiento cuando se conoce la distancia recorridaen un tiempo dado, se recurre al cálculo diferencial, es decir, se debe calcular la derivadade la curva que representa la dependencia de la distancia respecto del tiempo.
El problema de la integración es recíproco al problema de derivación y viceversa.
Al integrar, función velocidad, se calcula distancia.
Al derivar, función distancia, se calcula velocidad.
6.3.1. Applets de Geogebra: Representación del movimiento
Representación del movimiento. En estos applets pueden modificar diferentes parámetrospara observar el comportamiento del movimiento que representan las diferentes funciones.
Applet de GeoGebra, Un carro:
http://www.geogebratube.org/student/m34761
Figura 13: Modelación de un carro
40

Applet de GeoGebra, Dos carros:
http://www.geogebratube.org/student/m34763
Figura 14: Modelación de dos carros
Applet de GeoGebra, Hormiga en movimiento:
http://www.geogebratube.org/student/m34765
Figura 15: Modelación de hormiga en movimiento
41

Applet de GeoGebra, Montaña Rusa:
http://www.geogebratube.org/student/m34770
Figura 16: Modelo para estudiar el comportamiento de la derivada de una función
Applet realizado con base en el trabajo de Daniel Mentrard:
Applet original: http://www.geogebratube.org/material/show/id/32494Sitio de Daniel Mentrard, Mathematiques: http://dmentrard.free.fr/GEOGEBRA/)
42

7. Acerca de los Elementos de Euclides
Los comienzos [de la Matemática] tuvieron una base intuitiva y empí-rica. El rigor se convirtió en una necesidad con los griegos, y -aunquese lograra poco hasta el siglo XIX- por un momento pareció alcanza-do. Pero todos los esfuerzos por perseguir el rigor hasta el final hanconducido a un callejón sin salida, donde ya no hay acuerdo sobrequé significa realmente. La matemática sigue viva y con buena salud,pero solo mientras se apoye en una base pragmática.
Morris Kline ([15], p. 1599)
7.1. Un poco de historia de Euclides
Euclides (330 a.C. - 275 a.C.) fue un matemático griego. En realidad se conoce muy poco suvida, pese a ser uno de los matemáticos más famosos de la Antigüedad.
Posiblemente Euclides estudió en Atenas, lo cual explica su conocimiento de la geometríaelaborada en la escuela de Platón, aunque no parece que estuviera familiarizado con lasobras de Aristóteles. Enseñó en la ciudad de Alejandría, donde alcanzó gran fama y prestigiodurante el reinado de Tolomeo I Sóter.
Euclides fue autor de diversos tratados, sin embargo su nombre se asocia principalmentea Los Elementos, que rivaliza por su difusión con las obras más famosas de la literaturauniversal, como la Biblia o el Quijote. En esencia, Los Elementos son una compilación deobras de autores anteriores a Euclides (entre los que destaca Hipócrates de Quíos). LosElementos se han transmitido a lo largo de 24 siglos a través de miles de ediciones y endiversas lenguas como el Griego original, el Árabe, el Latín y lenguas modernas como Inglés,Alemán, Euskera, Castellano, Catalán, entre muchas otras.
7.2. Los Elementos
Los Elementos son en sí una compilación sustancial de conocimiento matemático. Fue utili-zado durante más de dos mil años como libro de estudio de contenidos matemáticos. En LosElementos se introdujo la noción de demostración y la ordenación lógica de los teoremas, ysu contenido determinó el curso del pensamiento matemático posterior.
En conjunto son 132 definiciones, 5 postulados, 5 nociones comunes o axiomas y unas 465proposiciones distribuidas en 13 libros. Entre los comentadores árabes se extendió la creenciade que el tratado incluía otros dos libros, el XIV y el XV, que complementaban el estudiode los sólidos regulares del libro XIII.
La teoría de la geometría plana se encuentra contenida en los libros I-IV [9]; la geometría del
43

espacio en XI-XIII [11]; la teoría generalizada de la proporción en V-VI [10]; la teoría arit-mética en VII-IX [10]; el libro X da una conceptualización precisa de la inconmesurabilidady una clasificación prolija de las variedades de rectas irracionales ([11]). La mayoría de lostemas contenidos en Los Elementos se mantienen actuales en programas de estudio de mate-máticas. De hecho, durante varios siglos, en diversas universidades alrededor del mundo, fueutilizado para la enseñanza de la geometría. Actualmente se utiliza como una introducciónbásica a la geometría.
Es importante resaltar que el contenido de Los Elementos está basado en construccioneselementales con regla y compás. Sin embargo, lo que ha llamado más la atención es elconjunto de definiciones, postulados y nociones comunes, con la que inicia el Libro.
7.3. Algunos contenidos de Los Elementos
7.3.1. El pórtico axiomático
El libro I empieza con definiciones, algunas de ellas son:
1. Un punto es lo que no tiene partes.2. Una línea es longitud sin anchura.3. Los extremos de una línea son puntos.4. Una línea recta es aquella que yace por igual respecto de los puntos que estánen ella.5. Una superficie es lo que solo tiene longitud y anchura.15. Un círculo es una figura plana comprendida por una línea tal que todas lasrectas que caen sobre ella desde un punto interior son iguales entre sí.16. Y el punto se llama centro del círculo.23. Son rectas paralelas las que estando en el mismo plano y siendo prolongadasindefinidamente en ambos sentidos no se encuentran una a otra en ninguno delos dos sentidos.
Después Euclides postula lo siguiente:
1. (Es posible) trazar una línea de cualquier punto a cualquier punto;
2. (Es posible) prolongar una recta finita continuamente en línea recta;
3. (Es posible) describir un circulo con cualquier centro y distancia;
4. Que todos los ángulos rectos son iguales ente sí;
44

5. Que si una línea recta al caer sobre dos rectas hace los ángulos interiores de un mismolado menores que dos ángulos rectos, entonces las dos rectas si son prolongadas inde-finidamente se encontraran por el lado en el que están los ángulos menores que dosrectos.
El soporte de los elementos se remata con una selección de nociones comunes:
1. cosas iguales a una misma cosa son también iguales entre sí
2. si cosas iguales se añaden a cosas iguales, los totales son iguales
3. si cosas iguales se sustraen de cosas iguales, los restos son iguales
4. las cosas que coinciden entre sí, son iguales
5. el todo es mayor que la parte
7.3.2. Algunas proposiciones
Como ya he mencionado, Los Elementos contienen alrededor de 465 proposiciones. A conti-nuación presento algunos ejemplos del Libro I, II y III.
Proposición 1 (Libro I). Construir un triángulo equilátero sobre una recta finita dada.
Figura 17: Proposición 1 (Libro I)
Proposición 11 (Libro I). Trazar una línea recta que forme ángulos rectos con una rectadada, desde un punto dado en ella.
45

Figura 18: Proposición 11 (Libro I)
Proposición 47 (Libro I). En los triángulos rectángulos el cuadrado del lado que subtiendeel ángulo recto es igual a los cuadrados de los lados que comprenden el ángulo recto.
Figura 19: Teorema de Pitágoras
Nota: Esta proposición se refiere al Teorema de Pitágoras. Ver Applet hecho en GeoGebra:
http://www.geogebratube.org/student/m33575
46

Proposición 4 (Libro II). Si se corta al azar una línea recta, el cuadrado de la (recta)entera es igual a los cuadrados de los segmentos y dos veces el rectángulo comprendido porlos segmentos.
Figura 20: Proposición 4 (Libro II)
Proposición 5 (Libro II). Si se corta una línea recta en (segmentos) iguales y desiguales,el rectángulo comprendido por los segmentos desiguales de la (recta) entera junto con elcuadrado de la (recta que está) entre los puntos de sección, es igual al cuadrado de la mitad.
Figura 21: Proposición 5 (Libro II)
47

Proposición 11 (Libro II). Dividir una recta dada de manera que el rectángulo comprendidopor la (recta) entera y uno de los segmentos sea igual al cuadrado del segmento restante.
Figura 22: Proposición 11 (Libro II)
Nota: Ver Applet de GeoGebra:
http://www.geogebratube.org/student/m33669
Proposición 21 (Libro II). En un círculo los ángulos en el mismo segmento son igualesentre sí.
Figura 23: Proposición 21 (Libro II)
48

Proposición 22 (Libro II). Los ángulos opuestos de los cuadriláteros en los círculos soniguales a dos rectos.
Figura 24: Proposición 22 (Libro II)
7.4. Comentarios Finales
La forma de presentación de las proposiciones no es originalmente de Euclides, pero sí essuya la forma de presentación del conjunto de la obra: La exposición de los axiomas al inicio,la explícita declaración de cada una de las definiciones y el ordenado encadenamiento de losteoremas, dispuestos de forma que vayan de los más simple a lo más complejo.
Aunque los matemáticos generalmente consideraron a Euclides como un modelo de rigorhasta bien entrado el siglo XIX, hay en el serios defectos que algunos matemáticos detectarony de hecho combatieron. El primero es el empleo de la superposición. El segundo, la vaguedadde algunas definiciones y las imprecisiones de otras. Por ejemplo, las definiciones iniciales depunto, línea y superficie no tienen sentido matemático preciso y, como ahora sabemos, nose les puede dar ninguno porque cualquier desarrollo matemático independiente debe incluirtérminos indefinidos. Incluso hay defectos en las demostraciones propuestas. Algunos sonerrores debidos a Euclides que pueden corregirse, aunque en ciertos casos se requeriría unanueva demostración. Otro tipo de defecto que recorre todos los Elementos es la afirmaciónde un teorema general del que sólo se prueba algún caso especial o para posiciones especialesde los datos propuestos [15, p. 126-127].
A pesar de estos defectos, Los Elementos tuvieron tanto éxito que desplazaron a todos lostextos de geometría anteriores. En el siglo III a. C., cuando aún se disponía de tratados degeometría, incluso Apolonio y Arquímedes se remitían a Los Elementos para citar resultadosanteriores a ellos.
En la actualidad permanecen vigentes como material de referencia y de estudio de diversoscontenidos matemáticos e incluso de estudio no sólo matemático sino también filosófico.
49


8. Transformaciones lineales
Un punto (x, y) representado en el plano cartesiano se observa de la siguiente manera:
Figura 25: Punto en el plano cartesiano
A este punto le podemos aplicar una serie de transformaciones para cambiarlo de posición.
Consideremos que el punto describe un vector, el cual podemos escribir como v = (x, y).
A este vector lo podemos rotar o incluso incrementar su magnitud y dirección.
8.1. Rotación y producto escala
Para rotar un vector, se utiliza la matriz
A =
(cosα − sinαsinα cosα
)Se multiplica la matriz A por el vector v = (x, y). Esto es(
cosα − sinαsinα cosα
)(xy
)= (x cosα− y sinα, x sinα + y cosα)
51

Para incrementar o disminuir la magnitud del vector se debe multiplicar por un escalar. Elescalar determinará la magnitud del vector v.
kv = (kx, ky)
Si combinamos ambas operaciones, rotación y producto escalar, obtenemos:
k · Av = k ·(
cosα − sinαsinα cosα
)(xy
)= (kx cosα− ky sinα, kx sinα + ky cosα)
Este nuevo vector depende de los parámetros α y k.
Ver Applet de GeoGebra:
http://www.geogebratube.org/student/m36010
Figura 26: Rotaciones en el plano
52

9. Proyecciones ortográficas
Es posible realizar proyecciones del espacio tridimensional sobre el plano de dos dimensiones,las cuales se denominan Proyecciones ortográficas.
Las proyecciones ortográficas son muy útiles para describir el movimiento de objetos quese mueven en el espacio por medio de una proyección al plano. También se utilizan pararealizar animaciones de objetos en tercera dimensión. Aunque en realidad, lo que se crea esuna ilusión de movimiento tridimensional.
Las transformaciones de las coordenadas de un punto (o puntos) del espacio se realizanmediante un cambio de origen (o transformación lineal), cambio de escala, y giros respectoa los ejes (de la misma forma se pueden hacer transformaciones en el plano).
A continuación se muestra una manera para rotar los planos Y Z, XZ y XY con respecto alos ejes X, Y y Z; respectivamente.
9.1. Matrices de rotación
Para lograr esto se utilizarán las siguientes matrices:
A =
1 0 00 cosα − sinα0 sinα cosα
B =
cos β 0 sin β0 1 0
− sin β 0 cos β
C =
cos γ − sin γ 0sin γ cos γ 0
0 0 1
Los ángulos α, β, y γ rotan a los planos Y Z, XZ y XY ; respectivamente.
Denotemos por M a la multiplicación de las matrices
A ·B · C
Esto es
M =
cos β cos γ − cos β sin γ sin βcosα sin γ + sinα sin β cos γ cosα cos γ − sinα sin β sin γ − sinα cos βsinα sin γ − cosα sinα cos γ cosα sin β sin γ + sinα cos γ cosα cos β
Después, para obtener un nuevo punto en el espacio (x′, y′, z′), se multiplica la matrizM por(x, y, z). Esto es
(x′, y′, z′) = M · (x, y, z)
. Pero como en el caso de las rotaciones (ver sección anterior), se puede considerar tambiénmultiplicar por un escalar para cambiar la magnitud o la dirección de (x′, y′, z′). Esto es
(x′, y′, z′) = k ·M · (x, y, z)
53

Entonces x′
y′
z′
= k ·
cosβ cos γ − cosβ sin γ sinβcosα sin γ + sinα sinβ cos γ cosα cos γ − sinα sinβ sin γ − sinα cosβsinα sin γ − cosα sinα cos γ cosα sinβ sin γ + sinα cos γ cosα cosβ
· x
yz
De lo cual se obtiene: x′
y′
z′
=
k(cos β(x cosα− y sen γ) + z sen β)k(cosα(y cos γ + x sen γ)− senα(z cos β + sen β(y sen γ − x cos γ)))k(cosα(z cos β + sen β(y sen γ − x cos γ)) + senα(y cos γ + x sen γ))
Para realizar la proyección ortográfica debemos establecer una base para poder generarcualquier punto en el espacio. En este caso, la base ortonormal
B = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}
nos servirá para dicha proyección.
Ahora, multiplicamos cada elemento de la base por la matriz M
A1 =
cosβ cos γ − cosβ sin γ sinβcosα sin γ + sinα sinβ cos γ cosα cos γ − sinα sinβ sin γ − sinα cosβsinα sin γ − cosα sinα cos γ cosα sinβ sin γ + sinα cos γ cosα cosβ
100
A2 =
cosβ cos γ − cosβ sin γ sinβcosα sin γ + sinα sinβ cos γ cosα cos γ − sinα sinβ sin γ − sinα cosβsinα sin γ − cosα sinα cos γ cosα sinβ sin γ + sinα cos γ cosα cosβ
010
A3 =
cosβ cos γ − cosβ sin γ sinβcosα sin γ + sinα sinβ cos γ cosα cos γ − sinα sinβ sin γ − sinα cosβsinα sin γ − cosα sinα cos γ cosα sinβ sin γ + sinα cos γ cosα cosβ
001
De lo cual se obtiene
A1 =
cos β cos γcosα sen γ + senα sen β cos γsenα sen γ − cosα sen β cos γ
A2 =
− cos β sen γcosα cos γ − senα sen β sen γcosα sen β sen γ + senα cos γ
54

A3 =
sen β− senα cos βcosα cos β
Lo anterior también se puede escribir de la siguiente forma
A1 = (cos β cos γ , cosα sen γ + senα sen β cos γ, senα sen γ − cosα sen β cos γ)
A2 = (− cos β sen γ , cosα cos γ − senα sen β sen γ, cosα sen β sen γ + senα cos γ)
A3 = (sen β ,− senα cos β, cosα cos β)
Los vectores anteriores nos permitirán hacer la proyección ortográfica. Consideremos el si-guiente arreglo:
XXXXXXXXXXVectorVariable x y z
(1, 0, 0) cosβ cos γ, cosα sen γ + senα senβ cos γ, senα sen γ − cosα senβ cos γ(0, 1, 0) − cosβ sen γ, cosα cos γ − senα senβ sen γ, cosα senβ sen γ + senα cos γ(0, 0, 1) senβ, − senα cosβ, cosα cosβ
Para realizar la proyección, debemos considerar una de las tres variables igual a 0. Por lotanto, tenemos 3 casos.
9.2. Un caso: cuando el eje Z es igual a cero
Un primer caso que debemos considerar es cuando z = 0. Por lo tanto tenemos:XXXXXXXXXXXXVector
Variable x y
(1, 0, 0) cos β cos γ, cosα sen γ + senα sen β cos γ,(0, 1, 0) − cos β sen γ, cosα cos γ − senα sen β sen γ,(0, 0, 1) sen β, − senα cos β,
Con base en este arreglo podemos establecer las fórmulas que nos permiten realizar la pro-yección ortográfica:
xx = Escala ∗ cos(β) ∗ cos(γ)
xy = Escala ∗ (cos(α) ∗ sen(γ) + sen(α) ∗ sen(β) ∗ cos(γ))
yx = Escala ∗ (− cos(β) ∗ sen(γ))
yy = Escala ∗ (cos(α) ∗ cos(γ)− sen(α) ∗ sen(β) ∗ sen(γ))
zx = Escala ∗ sen(β)
zy = Escala ∗ (− sen(α) ∗ cos(β))
55

En las anteriores ecuaciones, el factor ’Escala’ es cualquier número real. Con esto valorespodemos establecer puntos en el plano que representan puntos en el espacio. Básicamente seestablece la base ortonormal, la cual nos permite crear la proyección ortográfica:
Xr = (xx, xy)
Yr = (yx, yy)
Zr = (zx, zy)
Por último, para establecer un punto cualquiera, simplemente hacemos una combinaciónlineal usando las coordenadas de los puntos que establecen la base ortonormal en R3. Esdecir:
Pr = (Px ∗ xx + Py ∗ yx + Pz ∗ zx, Px ∗ xy + Py ∗ yy + Pz ∗ zy)
Este punto, el cual está definido en R2, representa un punto en el espacio R3.
Observación: Si se desea mover un punto en el espacio (x, y, z) con respecto a un soloángulo, entonces se debe considerar α = β = γ.
Finalmente, para reducir las variables involucradas, podemos establecer uno de los ejes comofijo. Para ello establecemos que alguno de los ángulos sea igual a 0. Si hacemos β = 0obtenemos las siguientes fórmulas
xx = Escala ∗ cos(γ)
xy = Escala ∗ cos(α) ∗ sen(γ)
yx = Escala ∗ (− sen(γ))
yy = Escala ∗ cos(α) ∗ cos(γ)
zx = 0
zy = Escala ∗ (− sen(α))
En este caso, el eje Z siempre estará definido en una línea recta.
Los siguientes applets, muestran las transformaciones de una base ortonormal y de un punto(x, y, z) en el espacio tridimensional.
Ver Applet de GeoGebra: Punto en movimiento (Figura 27)
http://www.geogebratube.org/student/m33861
Ver Applet de GeoGebra: Punto en el espacio con coordenadas (x, y, z) (Figura 28)
http://www.geogebratube.org/student/m36072
56

Figura 27: Punto en el espacio
Figura 28: Punto con vector en R3
57

9.3. Ángulos de Euler
Existen otras maneras de hacer proyecciones ortográficas. Los ángulos de Euler constituyenun conjunto de tres coordenadas angulares que sirven para especificar la orientación de unsistema de referencia de ejes ortogonales, normalmente móvil, respecto a otro sistema dereferencia de ejes ortogonales normalmente fijos. Fueron introducidos por Leonhard Euler enmecánica del sólido rígido para describir la orientación de un sistema de referencia con unsólido rígido en movimiento. Para más información consultar el sitio Wolfram MathWorld:
http://mathworld.wolfram.com/EulerAngles.html
Figura 29: Dos sistemas ortonormales en donde se muestran los ángulos de Euler. (Imagende Wikipedia)
En este caso, las matrices de rotación de Euler son:
A =
cosψ − sinψ 0− sinψ cosψ 0
0 0 1
B =
1 0 00 cos θ sin θ0 − sin θ cos θ
C =
cosφ − sinφ 0− sinφ cosφ 0
0 0 1
Dados dos sistemas de coordenadas xyz y XY Z con origen común, es posible determinar laposición de un sistema en términos del otro usando tres ángulos φ, θ y ψ. La intersección delos planos se llama línea de nodos (ver Figura 29) y se usa para definir los tres ángulos:
φ es el ángulo entre el eje x y la línea de nodos.
58

θ es el ángulo entre el eje z y el eje Z.
ψ es el ángulo entre la línea de nodos y el eje X.
Como en la sección anterior, se debe multiplicar las matrices A, B, y C y después se debecalcular una base ortonormal. Sea M la multiplicación de las matrices, entonces
M =
cosφ cosψ − cos θ sinφ sinψ cos θ cosφ sinψ + sinφ cosψ sin θ sinψ− cos θ sinφ cosψ − cosφ sinψ cos θ cosφ cosψ − sinφ sinψ sin θ cosψ
sin θ sinφ − sin θ cosφ cos θ
Para realizar la proyección ortográfica utilizamos la base ortonormal
B = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}
Al multiplicar la matriz M por cada vector de la base obtenemos:
A1 = M
100
=
cosφ cosψ − cos θ sinφ sinψ− cos θ sinφ cosψ − cosφ sinψ
sin θ sinφ
A2 = M
010
=
cos θ cosφ sinψ + sinφ cosψcos θ cosφ cosψ − sinφ sinψ
− sin θ cosφ
A3 = M
001
=
sin θ sinψsin θ cosψ
cos θ
Lo anterior también se puede escribir de la siguiente forma
A1 = (cosφ cosψ − cos θ sinφ sinψ ,− cos θ sinφ cosψ − cosφ sinψ, sin θ sinφ)
A2 = (cos θ cosφ sinψ + sinφ cosψ , cos θ cosφ cosψ − sinφ sinψ, − sin θ cosφ)
A3 = (sin θ sinψ , sin θ cosψ, cos θ)
Los vectores anteriores permiten realiza la proyección ortográfica.
Consideremos el siguiente arreglo:
XXXXXXXXXXVectorVariable x y z
(1, 0, 0) cosφ cosψ − cos θ sinφ sinψ, − cos θ sinφ cosψ − cosφ sinψ, sin θ sinφ(0, 1, 0) cos θ cosφ sinψ + sinφ cosψ, cos θ cosφ cosψ − sinφ sinψ, − sin θ cosφ(0, 0, 1) sin θ sinψ, sin θ cosψ, cos θ
59

En este caso, se considerará solamente la rotación del plano XY con respecto el ángulo ψ yla rotación del eje Z con respecto al ángulo θ. Por lo tanto debemos considerar el siguientearreglo
XXXXXXXXXXVectorVariable x z
(1, 0, 0) cosφ cosψ − cos θ sinφ sinψ, sin θ sinφ(0, 1, 0) cos θ cosφ sinψ + sinφ cosψ, − sin θ cosφ(0, 0, 1) sin θ sinψ, cos θ
Con base en este arreglo podemos establecer las fórmulas que nos permiten realizar la pro-yección ortográfica:
xx = Escala ∗ (cosφ cosψ − cos θ sinφ sinψ)
xy = Escala ∗ sin θ sinφ
yx = Escala ∗ (cos θ cosφ sinψ + sinφ cosψ)
yy = Escala ∗ (− sin θ cosφ)
zx = Escala ∗ sin θ sinψ
zy = Escala ∗ cos θ
En las anteriores ecuaciones, el factor ’Escala’ es cualquier número real. Con esto valorespodemos establecer puntos en el plano que representan puntos en el espacio. Básicamente seestablece la base ortonormal, la cual nos permite crear la proyección ortográfica:
Xr = (xx, xy)
Yr = (yx, yy)
Zr = (zx, zy)
Por último, para establecer un punto cualquiera, simplemente hacemos una combinaciónlineal usando las coordenadas de los puntos que establecen la base ortonormal en R3. Esdecir:
Pr = (Px ∗ xx + Py ∗ yx + Pz ∗ zx, Px ∗ xy + Py ∗ yy + Pz ∗ zy)
Este punto, el cual está definido en R2, representa un punto en el espacio R3.
60

Finalmente, para reducir las variables involucradas, podemos establecer uno de los ejes comofijo. Para ello establecemos que uno de los ángulos sea igual a 0. Si hacemos ψ = 0 obtenemoslas siguientes fórmulas
xx = Escala ∗ cosφ
xy = Escala ∗ sin θ sinφ
yx = Escala ∗ sinφ
yy = Escala ∗ (− sin θ cosφ)
zx = 0
zy = Escala ∗ cos θ
61


10. Torre sobre la montaña
10.1. Planteamiento del problema
El siguiente problema se puede resolver de distintas formas. En el presente trabajo se resuelveutilizando un sistema de referencia, el Plano Cartesiano.
Problema:
Se planea construir una torre de una compañía celular en la parte oeste de una montañacomo se muestra en la figura:
Figura 30: Torre de teléfono sobre montaña
¿Qué tan alto se debe poner la torre de tal manera que pueda dar señal a la parte este,después del lago?
Preguntas
1. ¿Qué información es necesaria para resolver el problema? ¿Qué información no es impor-tante saber?
2. Piensa geométricamente o algebraicamente, ¿cómo podrías matematizar el problema?
3. Usa la siguiente información para dibujar un modelo más preciso:
La torre tiene una altura de 60 metros.
La montaña tiene una altura de 243 metros y tiene una base de 853 metros desde eleste hasta el oeste.
La montaña es simétrica.
El lago inicia en la base de la montaña (este) y tienen un ancho de 182 metros.
63

4. Primero predice o estima el punto donde se debe poner la torre sobre la montaña de talmanera que dé señal a la parte este, después del lago. Ahora, determina el punto exacto.Explica y escribe tu respuesta.
5. ¿Qué tan cercana fue tu predicción? ¿Es tu solución razonable? Explica tu respuesta.
6. ¿Qué sucede si cambias los datos?
Fuente:
Problema adaptado de la NCTM: Illuminations http://illuminations.nctm.org/
10.2. Solución al problema por medio de ecuaciones lineales
Se puede realizar un modelo dinámico del problema para encontrar la respuesta intuitiva-mente.
Ver Applet de GeoGebra: Torre en montaña
http://www.geogebratube.org/student/m37286
Figura 31: Modelo dinámico del problema de la torre en la montaña
Como se mencionó anteriormente, el problema se puede resolver de distintas maneras. Eneste caso, usaremos el plano cartesiano y las condiciones dadas en el inciso 3 de la secciónanterior. El origen del plano cartesiano será la base de la izquierda de la montaña, como semuestra en la Figura 32.
64

Figura 32: Modelo del problema en el plano cartesiano
Identificamos los puntos O, A, B, y D, los cuales están definidos como sigue:
O = (0, 0)
A = (853, 0)
B = (1035, 0)
D = (426.5, 243)
En la Figura 33 podemos apreciar tres rectas. Una es la recta l1 que pasa por los puntos Dy B, otra es la recta l2 que pasa por los puntos O y D, por último la recta l3 que pasa porel extremo superior de la antena y es paralela a l2.
Figura 33: Modelo del problema en el plano cartesiano
Las rectas l1 y l3 se intersecan en el extremo superior de la torre (ver Figura 33). Por lo
65

tanto para encontrar el punto P , se tiene que restar la altura de la torre. Pero primero sedebe encontrar el punto de intersección entre l1 y l3.
Las rectas l1 y l3 están definidas por las siguientes fórmulas
y = − 486
1217x+
503010
1217
y =243
426.5x+ 60
respectivamente.
Al resolver el sistema de ecuaciones obtenemos que
x =12226049
33534≈ 364.58665 . . . y y =
18473
69≈ 267.72463 . . .
Finalmente a la variable y se le debe restar la altura de la torre, es decir
y − 60 =18473
69− 60 =
14333
69≈ 207.72463 . . .
Por lo tanto, las coordenadas del punto P son
xp =12226049
33534≈ 364.58665 . . . y yp =
14333
69≈ 207.72463 . . .
También se puede expresar la solución de otra manera, por ejemplo
P =
(12226049
33534,14333
69
)o P = (364.58665 . . . , 207.72463 . . .)
66

11. Curvas paramétricas
El objetivo de esta sección es generar una curva que representa a π. Para esto se requiereutilizar la idea de ecuación o curva paramétrica.
En matemáticas, una ecuación paramétrica permite representar una o varias curvas o su-perficies en el plano o en el espacio, mediante valores arbitrarios o mediante una constante,llamada parámetro, en lugar de mediante una variable independiente de cuyos valores sedesprenden los de la variable dependiente.
11.1. Ejemplos de curvas paramétricas
11.1.1. Parábola
Dada la ecuación y = x2, una parametrización tendrá la forma{x = u(t)
y = v(t)
con t ∈ R. Una parametrización posible sería{x = t
y = t2
Figura 34: Curva paramétrica para la función f(x) = x2
67

11.1.2. Circunferencia
Una circunferencia con centro en el origen de coordenadas cartesianas y radio r verifica quex2 + y2 = r2.
Una expresión paramétrica de la circunferencia es{x = r cos t
y = r sin t
El parámetro t es un número real y determina el dominio de la curva, en este caso t ∈ [0, 2π].
Figura 35: Curva paramétrica para la función x2 + y2 = r2 para r = 1.2
11.1.3. Elipse
Una expresión paramétrica de la elipse es{x = a cos t
y = r sin t
con t ∈ [0, 2π].
11.1.4. Cardioides y otras curvas
Consideremos la siguiente expresión paramétrica{x = (a− b) cos(t) + b cos(t((a/b)− 1))
y = (a− b) sen(t) − b sen(t((a/b)− 1))
68

con a, b ∈ R, b 6= 0 y t ∈ R+. Dependiendo de los parámetros a, b y t se formar diversascurvas, entre ellas la cardioide.
Otra curva paramétrica que se puede definir es la Curva mariposa:{x = sin(t)
(ecos(t) − 2 cos(4t)− sen5 (t/12)
)b = cos(t)
(ecos(t) − 2 cos(4t)− sen5 (t/12)
)con t ∈ [0, 7π].
Figura 36: Elipse (azul), cardioide (rojo) y Curva mariposa (morado)
En el siguiente applet, realizado con GeoGebra, se puede interactuar con diferentes curvasparamétricas:
http://www.geogebratube.org/material/show/id/40216
69

11.1.5. Curva Pi
Para generar la curva que representa a π, es necesario definir propiamente a las funcionesu(t) y v(t). Sea
Curva pi =
{x = u(t)
y = v(t)
Donde la función u(t) se define de la siguiente manera:
u (t) =70
37sen(
65
32− 32t
)+
11
12sen(
98
41− 31t
)+
26
29sen(
35
12− 30t
)+
54
41sen(
18
7− 29t
)+
177
71sen(
51
19− 27t
)+
59
34sen(
125
33− 26t
)+
49
29sen(
18
11− 25t
)+
151
75sen(
59
22− 24t
)+
52
9sen(
118
45− 22t
)+
52
33sen(
133
52− 21t
)+
37
45sen(
61
14− 20t
)+
143
46sen(
144
41− 19t
)+
254
47sen(
19
52− 18t
)+
246
35sen(
92
25− 17t
)+
722
111sen(
176
67− 16t
)+
136
23sen(
3
19− 15t
)+
273
25sen(
32
21− 13t
)+
229
33sen(
117
28− 12t
)+
19
4sen(
43
11− 11t
)+
135
8sen(
23
10− 10t
)+
205
6sen(
33
23− 8t
)+
679
45sen(
55
12− 7t
)+
101
8sen(
11
12− 6t
)+
2760
59sen(
40
11− 5t
)+
1207
18sen(
21
23− 4t
)+
8566
27sen(
39
28− 3t
)+
12334
29sen(
47
37− 2t
)+
15410
39sen(
185
41− t)− 596
17sen(
9t+3
26
)− 247
28sen(
14t+25
21
)−458
131sen(
23t+21
37
)− 41
36sen(
28t+7
8
)
70

Y la función v(t) se define como:
u (t) =70
37sen(
65
32− 32t
)+
11
12sen(
98
41− 31t
)+
26
29sen(
35
12− 30t
)+
54
41sen(
18
7− 29t
)+
177
71sen(
51
19− 27t
)+
59
34sen(
125
33− 26t
)+
49
29sen(
18
11− 25t
)+
151
75sen(
59
22− 24t
)+
52
9sen(
118
45− 22t
)+
52
33sen(
133
52− 21t
)+
37
45sen(
61
14− 20t
)+
143
46sen(
144
41− 19t
)+
254
47sen(
19
52− 18t
)+
246
35sen(
92
25− 17t
)+
722
111sen(
176
67− 16t
)+
136
23sen(
3
19− 15t
)+
273
25sen(
32
21− 13t
)+
229
33sen(
117
28− 12t
)+
19
4sen(
43
11− 11t
)+
135
8sen(
23
10− 10t
)+
205
6sen(
33
23− 8t
)+
679
45sen(
55
12− 7t
)+
101
8sen(
11
12− 6t
)+
2760
59sen(
40
11− 5t
)+
1207
18sen(
21
23− 4t
)+
8566
27sen(
39
28− 3t
)+
12334
29sen(
47
37− 2t
)+
15410
39sen(
185
41− t)− 596
17sen(
9t+3
26
)− 247
28sen(
14t+25
21
)−458
131sen(
23t+21
37
)− 41
36sen(
28t+7
8
)
11.1.6. Curva paramétrica que representa a Pi
Ver Applet de GeoGebra (Figura 37):
http://www.geogebratube.org/student/m36997
11.1.7. Curva paramétrica que representa a Pi en 3D
Ver Applet de GeoGebra (Figura 38):
http://www.geogebratube.org/student/m36373
71

Figura 37: Curva paramétrica que representa a Pi
Figura 38: Pi en 3D
72

11.2. Espiral logarítmica y espiral en 3D
La espiral logarítmica es una curva muy especial cuya expresión se puede representar pormedio de la fórmula:
θ = logb(r/a).
Esta curva se puede apreciar en la naturaleza en diversos contextos:
Figura 39: Foto by Juan Carlos Ponce Campuzano
Figura 40: Foto by Juan Carlos Ponce Campuzano
73

Figura 41: Foto by Juan Carlos Ponce Campuzano
Figura 42: Foto by Juan Carlos Ponce Campuzano
74

Figura 43: Islandia, Foto de Wikipedia
11.2.1. Espiral logarítmica
Una parametrización de la espiral logarítmica es la siguiente:{x = abr cos(t)
y = abt sin(t)
Figura 44: Espiral logarítmica
75

Ver Applet de GeoGebra:
http://www.geogebratube.org/student/m37003
11.2.2. Espiral en 3D
Ver Applet de GeoGebra:
http://www.geogebratube.org/student/m36368
Figura 45: Espiral en 3D
Applets realizados con base en el trabajo de:
Daniel Mentrard (Mathematiques: http://dmentrard.free.fr/GEOGEBRA/)
Rafael Miranda (Geometría 3D: http://www.geometriadinamica.cl/)
76

12. El Cubo, uno de los sólidos platónicos
Un cubo, o hexaedro regular, es un poliedro de seis caras cuadradas congruentes. También sepuede clasificar como paralelepípedo, recto y rectángulo, pues todas sus caras son de cuatrolados y paralelas dos a dos.
El cubo forma parte de los sólidos platónicos, los cuales son poliedros convexos cuyas carasson polígonos regulares iguales y en cuyos vértices se unen el mismo número de caras. Entotal hay 5 sólidos platónicos, estos son el tetraedro, el cubo, el octaedro, el dodecaedro y elicosaedro. Esta lista es exhaustiva, ya que es imposible construir otro sólido diferente de losanteriores que cumpla todas las propiedades exigidas, es decir, convexidad y regularidad.
En 1750 Leonhard Euler publicó su Teorema de poliedros, el cual indica la relación entre elnúmero de Caras (C), Aristas (A) y Vértices (V) de un poliedro convexo (sin orificios, nientrantes) cualquiera:
V − A+ C = 2
Euler también demostró que sólo pueden ser cinco los sólidos regulares, aunque esto ya sehabía demostrado en la antigüedad (ver Los Elementos de Euclides).
El cubo al igual que el resto de los sólidos platónicos, cumple el Teorema de poliedros deEuler, pues tiene seis caras, ocho vértices y doce aristas:
8− 12 + 6 = 2
Figura 46: Cubo en 3D
77

En el siguiente applet, realizado con GeoGebra, se puede interactuar con un cubo en 3D:
http://www.geogebratube.org/student/m34690
12.1. Secuencia de construcción de cubo en 3D
Para realizar la construcción del cubo en 3D, primero se debe descargar el archivo de Geo-Gebra con nombre Base ortonormal:
http://www.geogebratube.org/material/show/id/88097
Este archivo establece una proyección ortográfica para hacer representaciones en 3D.
Una vez abierto el archivo Base ortonormal, en GeoGebra, se debe definir los deslizadores:
α: Ángulo entre 0 y 90, con 1 de incremento.
a = 1 y b = 1 (ocultos).
Posteriormente, se deben definir los vértices y las caras del cubo de tal manera que se puedaabrir o cerrar utilizando el deslizador α.
Caras del cubo
Base: Para hacer la base del cubo, se deben definir los vértices y polígono.
1. A=O + a*u + b*v
2. B=O - a*u + b*v
3. C=O - a*u - b*v
4. D=O + a*u - b*v
5. Usar el comando polígono para hacer la cara del cubo ABCD.
Caras laterales I: Definir vértices y polígonos.
1. E=O + a*u + b*v + 2cos(α)*u + 2sen(α)*w
2. F=O + a*u - b*v + 2cos(α)*u + 2sen(α)*w
3. G=O - a*u + b*v - 2cos(α)*u + 2sen(α)*w
4. H=O - a*u - b*v - 2cos(α)*u + 2sen(α)*w
78

5. Usar el comando polígono para hacer caras laterales del cubo BCHG y ADFE.
Caras laterales II: Definir vértices y polígonos.
1. I=O + a*u + b*v + 2cos(α)*v + 2sen(α)*w
2. J=O - a*u + b*v + 2cos(α)*v + 2sen(α)*w
3. K=O + a*u - b*v - 2cos(α)*v + 2sen(α)*w
4. L=O - a*u - b*v - 2cos(α)*v + 2sen(α)*w
5. Usar el comando polígono para hacer caras laterales del cubo ABJI y CDKL.
Caras superior o tapa: Definir vértices y polígono.
1. M=O + a*u + b*v + 2cos(α)*u + 2sen(α)*w +2cos(2α)*u+ 2sen(2α)*w
2. N=O + a*u - b*v + 2cos(α)*u + 2sen(α)*w +2cos(2α)*u+ 2sen(2α)*w
3. Usar el comando polígono para hacer la cara superior del cubo EFNM .
79


13. Secuencias y Listas en GeoGebra
GeoGebra tiene definido un sin número de comandos. Los que utilizaremos aquí son lossiguientes:
Segmento[<Punto>,<Punto>]
Listas=<Objeto1>,. . .,<Objeton>
Secuencia[ <Expresión>, <Variable>, <Valor Inicial>, <Valor Final>]
Secuencia[ <Expresión>, <Variable>, <Valor Inicial>, <Valor Final>, <Incremen-to>]
Curva[ <Expresión>, <Expresión>, <Parámetro Variable>, <Valor Inicial>, <ValorFinal>]
Con estos comandos podemos crear listas de objetos. A continuación se presentan diversosusos de los comandos mencionados.
13.1. Secuencias de segmentos
13.1.1. Mantel elástico
En el siguiente Applet se puede apreciar una especie de mantel elástico (Figura 47) que fuecreado usando secuencias de segmentos:
http://www.geogebratube.org/material/show/id/38983
Los pasos para crear el mantel son los siguientes:
1. Definir un deslizador a entre 0 y 20, con incremento de 1.
2. Para crear segmentos horizontales se escribe el comando:Secuencia[Segmento[A + i*(B - A)/a, C + i*(D - C)/a], i, 0, a]
3. Para crear segmentos verticales se escribe el comando:Secuencia[Segmento[A + i*(C - A)/a, B + i*(D - B)/a], i, 0, a]
81

Figura 47: Mantel elástico
13.1.2. Envolvente parabólica
En el siguiente Applet se puede apreciar una envolvente parabólica que fue creado usandosecuencias de segmentos:
http://www.geogebratube.org/material/show/id/38984
Figura 48: Envolvente parabólica
Los pasos para crear la envolvente son los siguientes:
1. Definir dos segmentos. Primero el segmento AB y, desde el punto B, el segmento BC.
82

2. Definir un deslizador a entre 0 y 20, con incremento de 1.
3. Para crear los segmentos se escribe el comando:Secuencia[Segmento[A + i*(B - A) / a, B + i*(C - B) / a], i, 0, a]
13.1.3. Grafos o Enlaces
La teoría de grafos4 (también llamada teoría de las gráficas) es un campo de estudio de lasmatemáticas y también de las ciencias de la computación. Esta teoría estudia las propieda-des de los grafos (también llamadas gráficas, que no se debe confundir con las gráficas defunciones que tienen una acepción más amplia), estructuras que constan de dos partes, elconjunto de vértices, nodos o puntos; y el conjunto de aristas, líneas o lados que pueden serorientados o no.
Figura 49: Ejemplos de grafos
La teoría de grafos es una rama de la matemáticas discretas y aplicadas, y es una disciplinaque unifica diversas áreas como por ejemplo la combinatoria, el álgebra, la probabilidad, lageometría de polígonos, la aritmética y la topología. Actualmente se utiliza en el campo dela informática, las ciencias de la computación y telecomunicaciones.
En teoría de grafos, un grafo completo es un grafo simple donde cada par de vértices estáconectado por una arista. Un grafo completo de n vértices tiene n(n−1)/2 aristas y se denotapor Kn (ver Figuras 50, 51, 52). La única manera para hacer que un grafo completo se tornedisconexo sería a través de la eliminación de todos los vértices. El teorema de Kuratowski5dice que un grafo planar no puede contener K5 (ó el grafo bipartito completo K3,3) y todoKn incluye a Kn−1, entonces ningún grafo completo Kn con n ≥ 5 es planar.
En el siguiente Applet se puede apreciar los grafos completos Kn, para n = 1, 2, 3 . . . , 40:
http://www.geogebratube.org/material/show/id/38986
4Para mayores detalles al respecto de la teoría de grafos consultar: [2] y [7]5[2, p. 268]
83

Figura 50: Grafo completo K5
Figura 51: Grafo completo K8
Figura 52: Grafo completo K13
84

Los pasos para crear los grafos completos son los siguientes:
1. Primero hay que definir dos puntos A y B en el plano.
2. Después, definir un deslizador a entre 0 y 20, con incremento de 1.
3. Para crear una lista de puntos que rotan con respecto al punto B se debe escribir losiguiente:Secuencia[Rota[A, i*2*p / a, B], i, 0, a]
4. Por último, para crear la secuencia de segmentos que unen a todos los puntos se debeescribir:Secuencia[Secuencia[Segmento[Elemento[lista1, i], Elemento[lista1, j]], i, 1, a], j, 1, a]
13.2. Superficies de revolución
Una superficie de revolución es una superficie que se genera mediante la rotación de unacurva plana, o generatriz, alrededor de una recta directriz, llamada eje de rotación, la cualse halla en el mismo plano que la curva.
Figura 53: Superficie de revolución
En la Figura 53 se puede apreciar una superficie de revolución que se obtiene al rotar lafunción f(x) = x2 con respecto al eje y.
85

En la mayoría de los libros de Cálculo6 se muestra que el área de la superficie lateral generadaal girar la gráfica de una función y = f(x) alrededor del eje x, está dada por la fórmula
Ax = 2π
∫ b
a
|f(x)|√
1 + [f ′(x)]2 dx.
Si se gira la gráfica alrededor del eje y, tenemos la expresión
Ax = 2π
∫ b
a
|x|√
1 + [f ′(x)]2 dx.
En Geogebra, es posible realizar una construcción para representar superficies de revolución.
13.2.1. Construcción de superficies de revolución con GeoGebra
Para realizar la construcción, primero se debe descargar el archivo de GeoGebra con nombreBase ortonormal:
http://www.geogebratube.org/material/show/id/88097
Este archivo establece una proyección ortográfica para hacer representaciones en 3D.
Una vez abierto el archivoBase ortonormal, en GeoGebra, se deben definir los deslizadores:
a: Entre -10 y 10, con 0.1 de incremento
b: Entre -10 y 10, con 0.1 de incremento
Rotar: Entre 0 y 6.28, con 0.1 de incremento
dx: Entre 0 y 20, con 1 de incremento
Después se define una función f(x) y los segmentos, con base en esta función, utilizando loscomandos de curva y secuencia de GeoGebra.
1. Definir función: f(x) = x
2. Curva[x(O + i*u + i*v + f(i)*w), y(O + i*u + i*v + f(i)*w), i, a, b]
3. Secuencia[Curva[x(O + i*cos(j)*u + i * sen(j)*v + f(i)*w),y(O + i*cos(j)*u + i*sen(j)*v + f(i)*w), i, a, b], j, 0, Rotar, p / dx]
6Consultar [1, p. 499-509]
86

4. Secuencia[Curva[x(O + i*cos(j)*u + i*sen(j)*v + f(i)*w),y(O + i*cos(j)*u + i*sen(j)*v + f(i)*w), j, 0, Rotar], i, a, b]
En el siguiente Applet se muestra la superficie de revolución de la función f(x) = x yf(x) = sen x cuando se rota el eje y (ver Figuras 54 y 55):
http://www.geogebratube.org/material/show/id/39851
Figura 54: Superficie de revolución construida con GeoGebra, f(x) = x
87

Figura 55: Superficie de revolución construida con GeoGebra, f(x) = senx
88

Referencias
[1] Bartle, R. G. & Ionescu Tulcea, C. (1968). Calculus. USA: Scott, Foresman and Com-pany. 86
[2] Bondy, J. A. & Murty, U. S. R. (2008). Graph Theory. Springer. 83
[3] Boyer, C. B. (1949). The History of the Calculus and its Conceptual Development. DoverPublications, Inc. New York. 38
[4] Burk, F. E. (2007). A Garden of Integrals. The American Mathematical Association.USA. 38
[5] Devlin, K. (1994). Mathematics: The science of patterns. New York: Scientific AmericanLibrary. 16
[6] Devlin, K, (2000). The Language of Mathematics: Making the Invisible Visible. 2nd. ed.W. H. Freeman and Company. USA. 15
[7] Diestel, R. (2000). Graph Theory. 2d. ed. Springer-Verlag. New York, Inc. 83
[8] Dubinsky, E. & Tall, D. (1991). Advance Mathematical Thinking and the Computer.En D. Tall (Ed.) Advance Mathematical Thinking. Netherlands: Kluwer Academic Pu-blishers. pp. 231-250. 3, 9
[9] Euclides. (1991). Los Elementos. Libros I-IV. Madrid: Gredos. (Col. Biblioteca ClásicaGredos No. 155). Traducción del griego al español de Ma. Luisa Puertas Castaños. 43
[10] Euclides. (1994). Los Elementos. Libros V-IX. Madrid: Gredos. (Col. Biblioteca ClásicaGredos No. 191). Traducción del griego al español de Ma. Luisa Puertas Castaños. 44
[11] Euclides. (1996). Los Elementos. Libros X-XIII. Madrid: Gredos. (Col. Biblioteca Clá-sica Gredos No. 228). Traducción del griego al español de Ma. Luisa Puertas Castaños.44
[12] Edwards, C. H. (1979). The Historical Development of the Calculus. New York Springer-Verlag. 38
[13] Hersh, R. (1997). What is mathematics, really? United States of America. Oxford Uni-versity Press. 15
[14] Kline, M. (1972). Mathematical Thought from Ancient to Modern Times. New York.Oxford University Press 37
[15] Kline, M. (1992). El pensamiento matemático de la antigüedad a nuestros días. AlianzaEditorial. Madrid, España. 43, 49
89

[16] Kline, M. (1999). Fracaso de la matemática moderna: ¿por qué Juanito no sabe sumar?19a. ed. (1a. Ed. 1976 ). México: Siglo XXI. 39
[17] Real Academia Española. (2001). Matemática. En Diccionario de la lengua española(22.a ed.). Recuperado de http://lema.rae.es/drae/?val=matem%C3%A1tica 13
[18] Toranzos, F. I. (1953). Introducción a la epistemología de la matemática. Argentina:Espasa-Calpe. 15
[19] Whiteside, D. T. (1960). Patterns of mathematical thought in the later seventeenthcentury, Archive for History of Exact Sciences, 1, 179-388. 37
90