Métodos clásicos para modelación de sistemas - Respuesta en frecuencia
22
Universidad Nacional de Misiones Ingeniería Electrónica Control Clásico y Moderno Informe de Laboratorio N° 2 Métodos Clásicos para Modelación de Sistemas: Respuesta en Frecuencia Autores: HOFF Romina A. KRUJOSKI Matías G. VIERA Juan R. Grupo Nº 4 Profesores Responsables: Dr. Ing. Fernando Botterón Ing. Guillermo Fernández Ing. Yonatan Aguirre Ing. Omar Bauernfeid Oberá, Misiones, 24/06/2014
-
Upload
matias-gabriel-krujoski -
Category
Engineering
-
view
207 -
download
1
Transcript of Métodos clásicos para modelación de sistemas - Respuesta en frecuencia
Universidad Nacional de Misiones
Ingeniería Electrónica
Control Clásico y Moderno
Informe de Laboratorio N° 2
Métodos Clásicos para Modelación de Sistemas:
Respuesta en Frecuencia
Autores:
HOFF Romina A.
KRUJOSKI Matías G.
VIERA Juan R.
Grupo Nº 4
Profesores Responsables:
Dr. Ing. Fernando Botterón
Ing. Guillermo Fernández
Ing. Yonatan Aguirre
Ing. Omar Bauernfeid
Oberá, Misiones, 24/06/2014

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 3 de 22
Introducción
En el presente informe se documentan los procedimientos de ensayo seguidos para
modelar en frecuencia un transformador eléctrico y un filtro. Además, se presentan los
resultados obtenidos y sus respectivos modelos. Finalmente, se pone de manifiesto el
grado de ajuste ofrecido por los modelos generados.
Metodología
Instrumentos, equipos y software
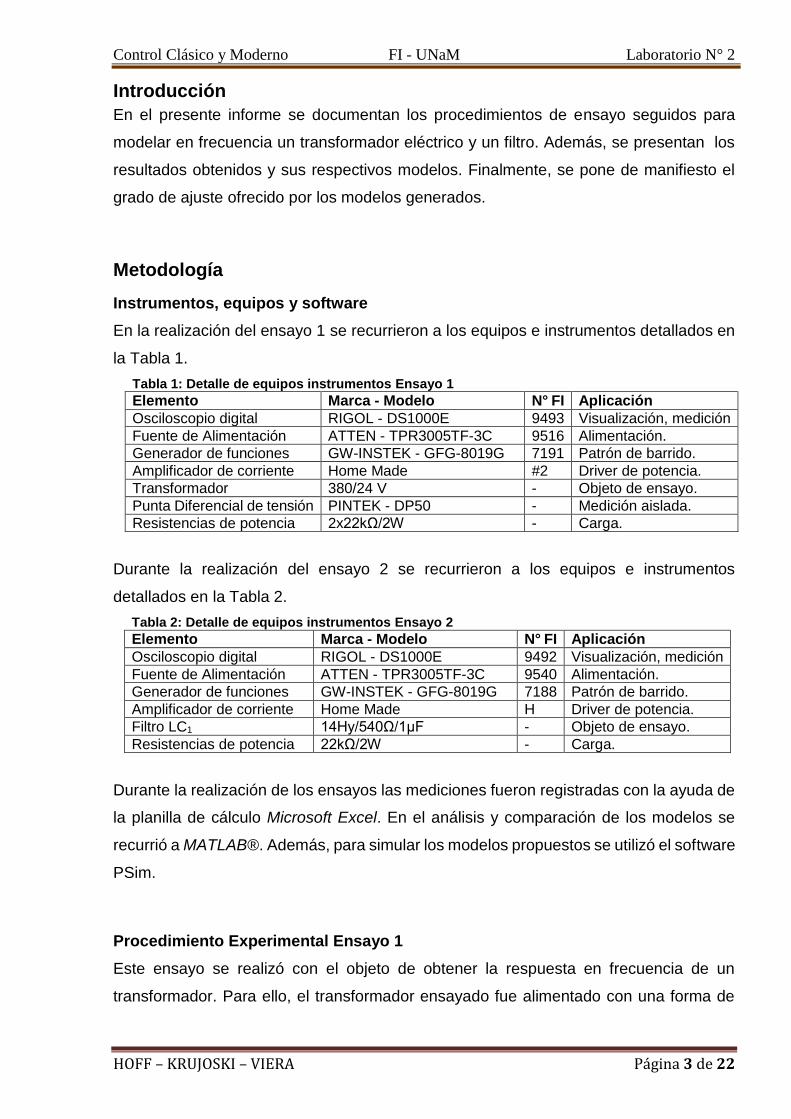
En la realización del ensayo 1 se recurrieron a los equipos e instrumentos detallados en
la Tabla 1.
Tabla 1: Detalle de equipos instrumentos Ensayo 1
Elemento Marca - Modelo N° FI Aplicación
Osciloscopio digital RIGOL - DS1000E 9493 Visualización, medición
Fuente de Alimentación ATTEN - TPR3005TF-3C 9516 Alimentación.
Generador de funciones GW-INSTEK - GFG-8019G 7191 Patrón de barrido.
Amplificador de corriente Home Made #2 Driver de potencia.
Transformador 380/24 V - Objeto de ensayo.
Punta Diferencial de tensión PINTEK - DP50 - Medición aislada.
Resistencias de potencia 2x22kΩ/2W - Carga.
Durante la realización del ensayo 2 se recurrieron a los equipos e instrumentos
detallados en la Tabla 2.
Tabla 2: Detalle de equipos instrumentos Ensayo 2
Elemento Marca - Modelo N° FI Aplicación
Osciloscopio digital RIGOL - DS1000E 9492 Visualización, medición
Fuente de Alimentación ATTEN - TPR3005TF-3C 9540 Alimentación.
Generador de funciones GW-INSTEK - GFG-8019G 7188 Patrón de barrido.
Amplificador de corriente Home Made H Driver de potencia.
Filtro LC1 14Hy/540Ω/1μF - Objeto de ensayo.
Resistencias de potencia 22kΩ/2W - Carga.
Durante la realización de los ensayos las mediciones fueron registradas con la ayuda de
la planilla de cálculo Microsoft Excel. En el análisis y comparación de los modelos se
recurrió a MATLAB®. Además, para simular los modelos propuestos se utilizó el software
PSim.
Procedimiento Experimental Ensayo 1
Este ensayo se realizó con el objeto de obtener la respuesta en frecuencia de un
transformador. Para ello, el transformador ensayado fue alimentado con una forma de
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 4 de 22
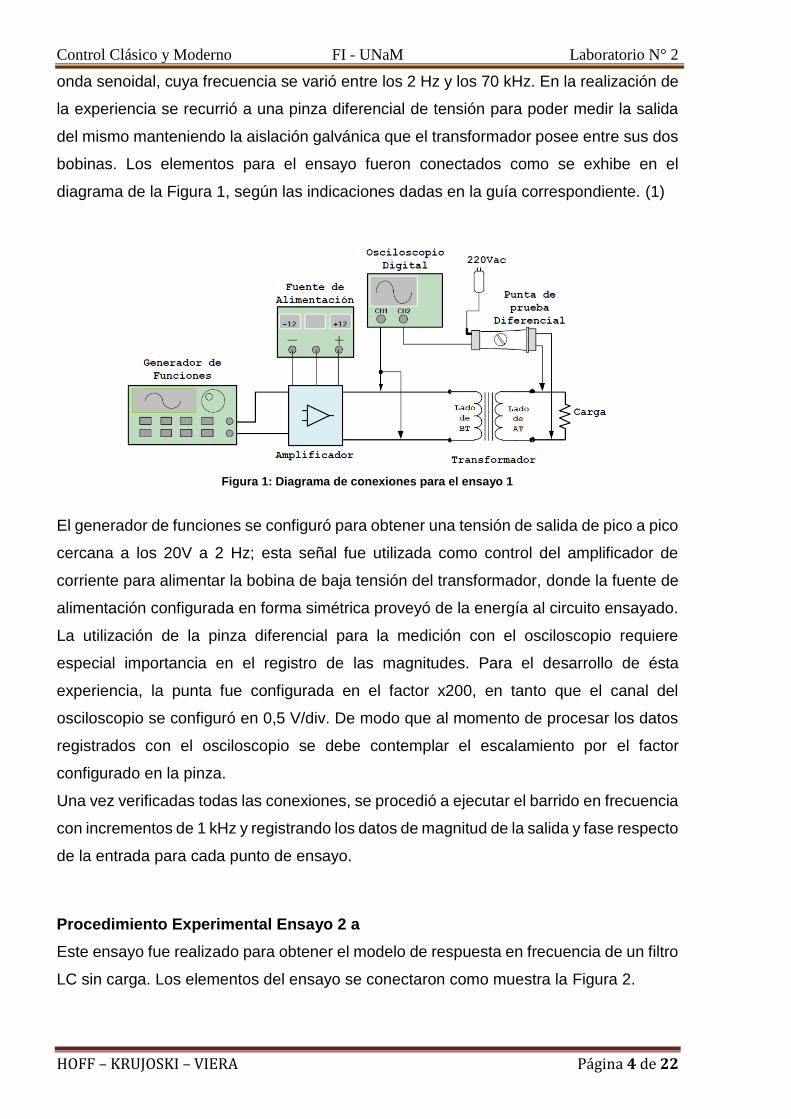
onda senoidal, cuya frecuencia se varió entre los 2 Hz y los 70 kHz. En la realización de
la experiencia se recurrió a una pinza diferencial de tensión para poder medir la salida
del mismo manteniendo la aislación galvánica que el transformador posee entre sus dos
bobinas. Los elementos para el ensayo fueron conectados como se exhibe en el
diagrama de la Figura 1, según las indicaciones dadas en la guía correspondiente. (1)
Figura 1: Diagrama de conexiones para el ensayo 1
El generador de funciones se configuró para obtener una tensión de salida de pico a pico
cercana a los 20V a 2 Hz; esta señal fue utilizada como control del amplificador de
corriente para alimentar la bobina de baja tensión del transformador, donde la fuente de
alimentación configurada en forma simétrica proveyó de la energía al circuito ensayado.
La utilización de la pinza diferencial para la medición con el osciloscopio requiere
especial importancia en el registro de las magnitudes. Para el desarrollo de ésta
experiencia, la punta fue configurada en el factor x200, en tanto que el canal del
osciloscopio se configuró en 0,5 V/div. De modo que al momento de procesar los datos
registrados con el osciloscopio se debe contemplar el escalamiento por el factor
configurado en la pinza.
Una vez verificadas todas las conexiones, se procedió a ejecutar el barrido en frecuencia
con incrementos de 1 kHz y registrando los datos de magnitud de la salida y fase respecto
de la entrada para cada punto de ensayo.
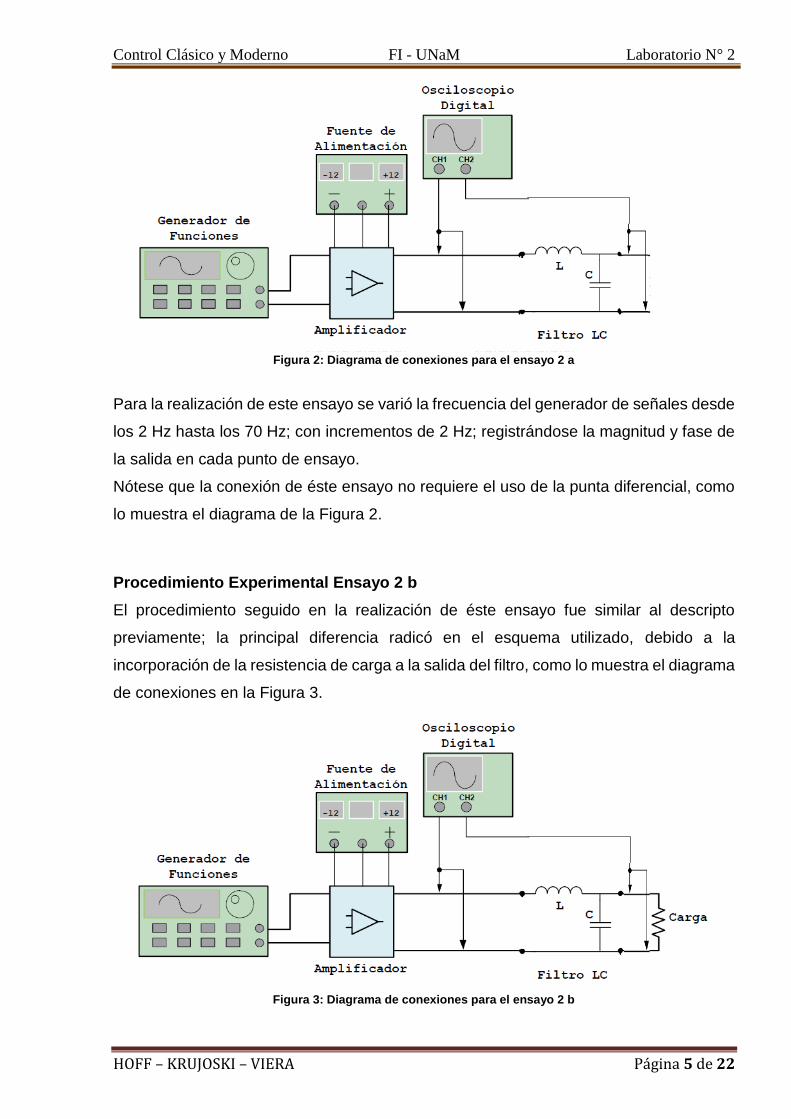
Procedimiento Experimental Ensayo 2 a
Este ensayo fue realizado para obtener el modelo de respuesta en frecuencia de un filtro
LC sin carga. Los elementos del ensayo se conectaron como muestra la Figura 2.
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 5 de 22
Figura 2: Diagrama de conexiones para el ensayo 2 a
Para la realización de este ensayo se varió la frecuencia del generador de señales desde
los 2 Hz hasta los 70 Hz; con incrementos de 2 Hz; registrándose la magnitud y fase de
la salida en cada punto de ensayo.
Nótese que la conexión de éste ensayo no requiere el uso de la punta diferencial, como
lo muestra el diagrama de la Figura 2.
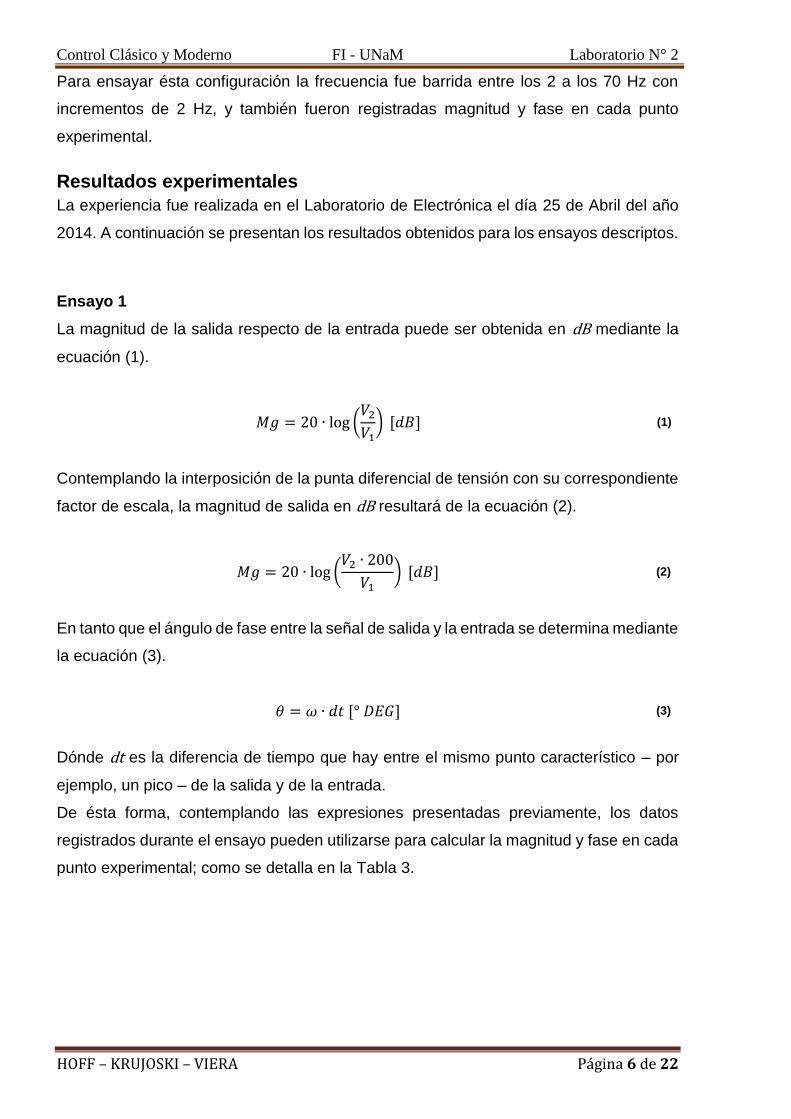
Procedimiento Experimental Ensayo 2 b
El procedimiento seguido en la realización de éste ensayo fue similar al descripto
previamente; la principal diferencia radicó en el esquema utilizado, debido a la
incorporación de la resistencia de carga a la salida del filtro, como lo muestra el diagrama
de conexiones en la Figura 3.
Figura 3: Diagrama de conexiones para el ensayo 2 b
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 6 de 22
Para ensayar ésta configuración la frecuencia fue barrida entre los 2 a los 70 Hz con
incrementos de 2 Hz, y también fueron registradas magnitud y fase en cada punto
experimental.
Resultados experimentales
La experiencia fue realizada en el Laboratorio de Electrónica el día 25 de Abril del año
2014. A continuación se presentan los resultados obtenidos para los ensayos descriptos.
Ensayo 1
La magnitud de la salida respecto de la entrada puede ser obtenida en dB mediante la
ecuación (1).
𝑀𝑔 = 20 ∙ log (𝑉2
𝑉1) [𝑑𝐵] (1)
Contemplando la interposición de la punta diferencial de tensión con su correspondiente
factor de escala, la magnitud de salida en dB resultará de la ecuación (2).
𝑀𝑔 = 20 ∙ log (𝑉2 ∙ 200
𝑉1) [𝑑𝐵] (2)
En tanto que el ángulo de fase entre la señal de salida y la entrada se determina mediante
la ecuación (3).
𝜃 = 𝜔 ∙ 𝑑𝑡 [° 𝐷𝐸𝐺] (3)
Dónde dt es la diferencia de tiempo que hay entre el mismo punto característico – por
ejemplo, un pico – de la salida y de la entrada.
De ésta forma, contemplando las expresiones presentadas previamente, los datos
registrados durante el ensayo pueden utilizarse para calcular la magnitud y fase en cada
punto experimental; como se detalla en la Tabla 3.
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 7 de 22
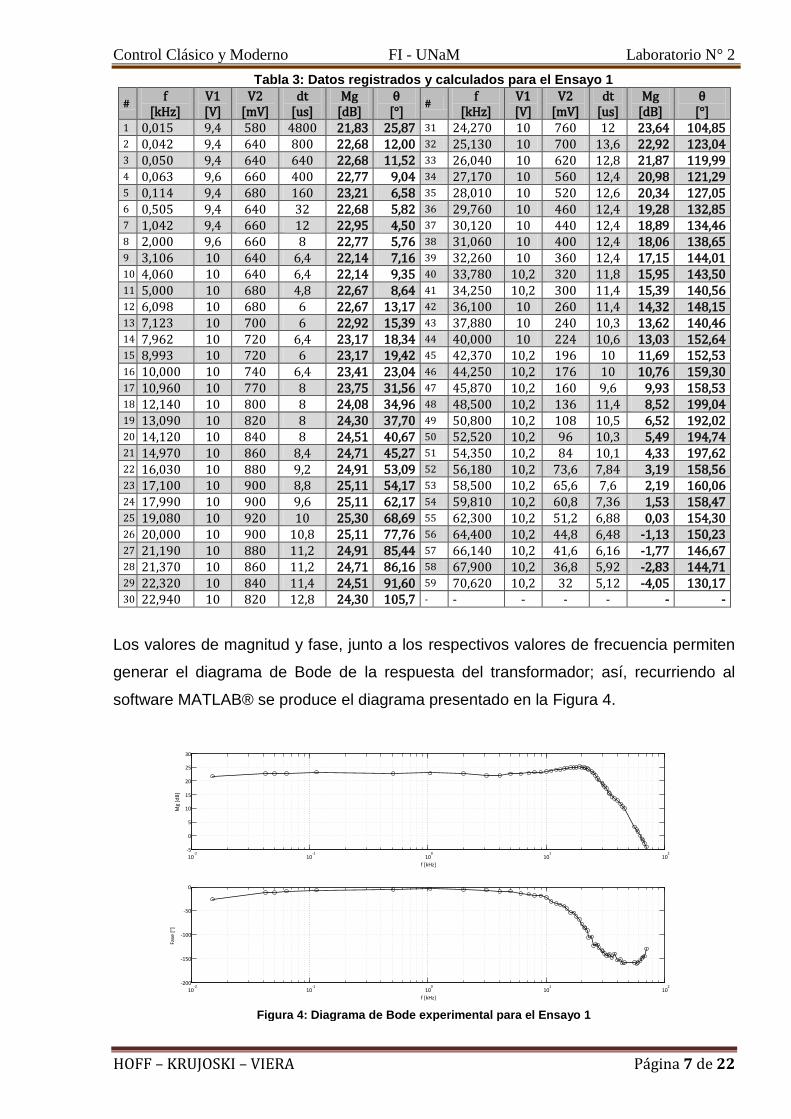
Tabla 3: Datos registrados y calculados para el Ensayo 1
# f
[kHz] V1 [V]
V2 [mV]
dt [us]
Mg [dB]
θ [°]
# f
[kHz] V1 [V]
V2 [mV]
dt [us]
Mg [dB]
θ [°]
1 0,015 9,4 580 4800 21,83 25,87 31 24,270 10 760 12 23,64 104,85 2 0,042 9,4 640 800 22,68 12,00 32 25,130 10 700 13,6 22,92 123,04 3 0,050 9,4 640 640 22,68 11,52 33 26,040 10 620 12,8 21,87 119,99 4 0,063 9,6 660 400 22,77 9,04 34 27,170 10 560 12,4 20,98 121,29 5 0,114 9,4 680 160 23,21 6,58 35 28,010 10 520 12,6 20,34 127,05 6 0,505 9,4 640 32 22,68 5,82 36 29,760 10 460 12,4 19,28 132,85 7 1,042 9,4 660 12 22,95 4,50 37 30,120 10 440 12,4 18,89 134,46 8 2,000 9,6 660 8 22,77 5,76 38 31,060 10 400 12,4 18,06 138,65 9 3,106 10 640 6,4 22,14 7,16 39 32,260 10 360 12,4 17,15 144,01 10 4,060 10 640 6,4 22,14 9,35 40 33,780 10,2 320 11,8 15,95 143,50 11 5,000 10 680 4,8 22,67 8,64 41 34,250 10,2 300 11,4 15,39 140,56 12 6,098 10 680 6 22,67 13,17 42 36,100 10 260 11,4 14,32 148,15 13 7,123 10 700 6 22,92 15,39 43 37,880 10 240 10,3 13,62 140,46 14 7,962 10 720 6,4 23,17 18,34 44 40,000 10 224 10,6 13,03 152,64 15 8,993 10 720 6 23,17 19,42 45 42,370 10,2 196 10 11,69 152,53 16 10,000 10 740 6,4 23,41 23,04 46 44,250 10,2 176 10 10,76 159,30 17 10,960 10 770 8 23,75 31,56 47 45,870 10,2 160 9,6 9,93 158,53 18 12,140 10 800 8 24,08 34,96 48 48,500 10,2 136 11,4 8,52 199,04 19 13,090 10 820 8 24,30 37,70 49 50,800 10,2 108 10,5 6,52 192,02 20 14,120 10 840 8 24,51 40,67 50 52,520 10,2 96 10,3 5,49 194,74 21 14,970 10 860 8,4 24,71 45,27 51 54,350 10,2 84 10,1 4,33 197,62 22 16,030 10 880 9,2 24,91 53,09 52 56,180 10,2 73,6 7,84 3,19 158,56 23 17,100 10 900 8,8 25,11 54,17 53 58,500 10,2 65,6 7,6 2,19 160,06 24 17,990 10 900 9,6 25,11 62,17 54 59,810 10,2 60,8 7,36 1,53 158,47 25 19,080 10 920 10 25,30 68,69 55 62,300 10,2 51,2 6,88 0,03 154,30 26 20,000 10 900 10,8 25,11 77,76 56 64,400 10,2 44,8 6,48 -1,13 150,23 27 21,190 10 880 11,2 24,91 85,44 57 66,140 10,2 41,6 6,16 -1,77 146,67 28 21,370 10 860 11,2 24,71 86,16 58 67,900 10,2 36,8 5,92 -2,83 144,71 29 22,320 10 840 11,4 24,51 91,60 59 70,620 10,2 32 5,12 -4,05 130,17 30 22,940 10 820 12,8 24,30 105,7 - - - - - - -
Los valores de magnitud y fase, junto a los respectivos valores de frecuencia permiten
generar el diagrama de Bode de la respuesta del transformador; así, recurriendo al
software MATLAB® se produce el diagrama presentado en la Figura 4.
10-2
10-1
100
101
102
-5
0
5
10
15
20
25
30
f [kHz]
Mg
[dB
]
10-2
10-1
100
101
102
-200
-150
-100
-50
0
f [kHz]
Fase
[°]
Figura 4: Diagrama de Bode experimental para el Ensayo 1
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 8 de 22
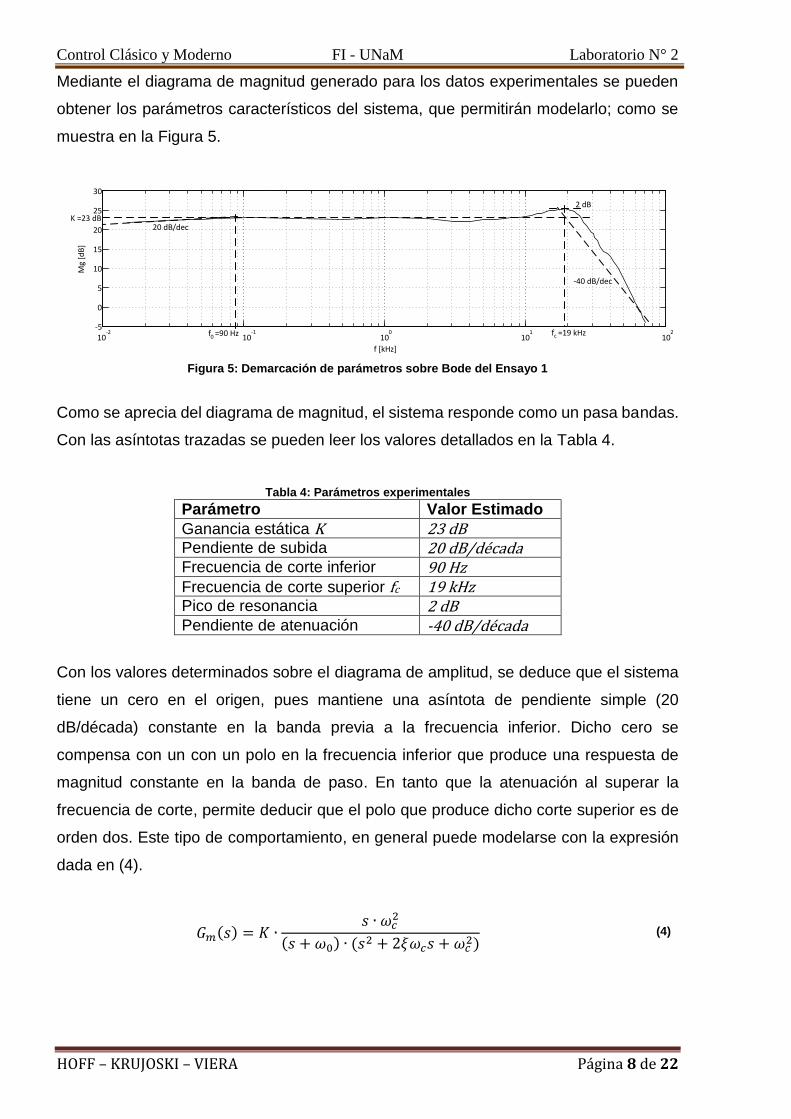
Mediante el diagrama de magnitud generado para los datos experimentales se pueden
obtener los parámetros característicos del sistema, que permitirán modelarlo; como se
muestra en la Figura 5.
Figura 5: Demarcación de parámetros sobre Bode del Ensayo 1
Como se aprecia del diagrama de magnitud, el sistema responde como un pasa bandas.
Con las asíntotas trazadas se pueden leer los valores detallados en la Tabla 4.
Tabla 4: Parámetros experimentales Parámetro Valor Estimado
Ganancia estática K 23 dB Pendiente de subida 20 dB/década Frecuencia de corte inferior 90 Hz Frecuencia de corte superior fc 19 kHz Pico de resonancia 2 dB Pendiente de atenuación -40 dB/década
Con los valores determinados sobre el diagrama de amplitud, se deduce que el sistema
tiene un cero en el origen, pues mantiene una asíntota de pendiente simple (20
dB/década) constante en la banda previa a la frecuencia inferior. Dicho cero se
compensa con un con un polo en la frecuencia inferior que produce una respuesta de
magnitud constante en la banda de paso. En tanto que la atenuación al superar la
frecuencia de corte, permite deducir que el polo que produce dicho corte superior es de
orden dos. Este tipo de comportamiento, en general puede modelarse con la expresión
dada en (4).
𝐺𝑚(𝑠) = 𝐾 ∙𝑠 ∙ 𝜔𝑐
2
(𝑠 + 𝜔0) ∙ (𝑠2 + 2𝜉𝜔𝑐𝑠 + 𝜔𝑐2)
(4)
10-2
10-1
100
101
102
-5
0
5
10
15
20
25
30
f [kHz]
Mg
[dB
]
-40 dB/dec
f =19 kHzcf =90 Hz0
20 dB/decK =23 dB
2 dB

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 9 de 22
De modo que se requiere conocer las frecuencias angulares de corte, obtenidas
mediante la simple conversión presentada en (5) y (6).
𝜔0 = 2𝜋 ∙ 𝑓0 = 2𝜋 ∙ 90 𝐻𝑧 = 565,48 𝑟𝑎𝑑
𝑠 (5)
𝜔𝑐 = 2𝜋 ∙ 𝑓𝑐 = 2𝜋 ∙ 19 𝑘𝐻𝑧 = 119,38𝑘𝑟𝑎𝑑
𝑠 (6)
Además, la ganancia estática debe convertirse de la magnitud en dB a veces, como lo
presenta la expresión (7).
𝐾|𝑣𝑒𝑐𝑒𝑠 = 10𝐾|𝑑𝐵
20 = 102320 = 14,12 (7)
El pico de resonancia, medido sobre el diagrama de magnitud, queda definido por la
expresión (8).De modo que el coeficiente de amortiguamiento relativo, para un sistema
de segundo orden se puede obtener de la expresión (9).
𝑀𝑟|𝑑𝐵 = −20 ∙ log (2𝜉) (8)
𝜉 =10
𝑀𝑟|𝑑𝐵20
2=
10−220
2= 0,397
(9)
Finalmente, operando con la ecuación (4) la función transferencia que se propone como
modelo resulta como en (10).
𝐺𝑚(𝑠) =2,013 ∙ 1011 𝑠
𝑠3 + 9,539 ∙ 104 𝑠2 + 1,431 ∙ 1010 𝑠 + 8,059 ∙ 1012 (10)
De esta forma, para comprobar el modelo propuesto se genera la superposición de los
diagramas de Bode experimental y modelado, como se muestra en la Figura 6.
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 10 de 22
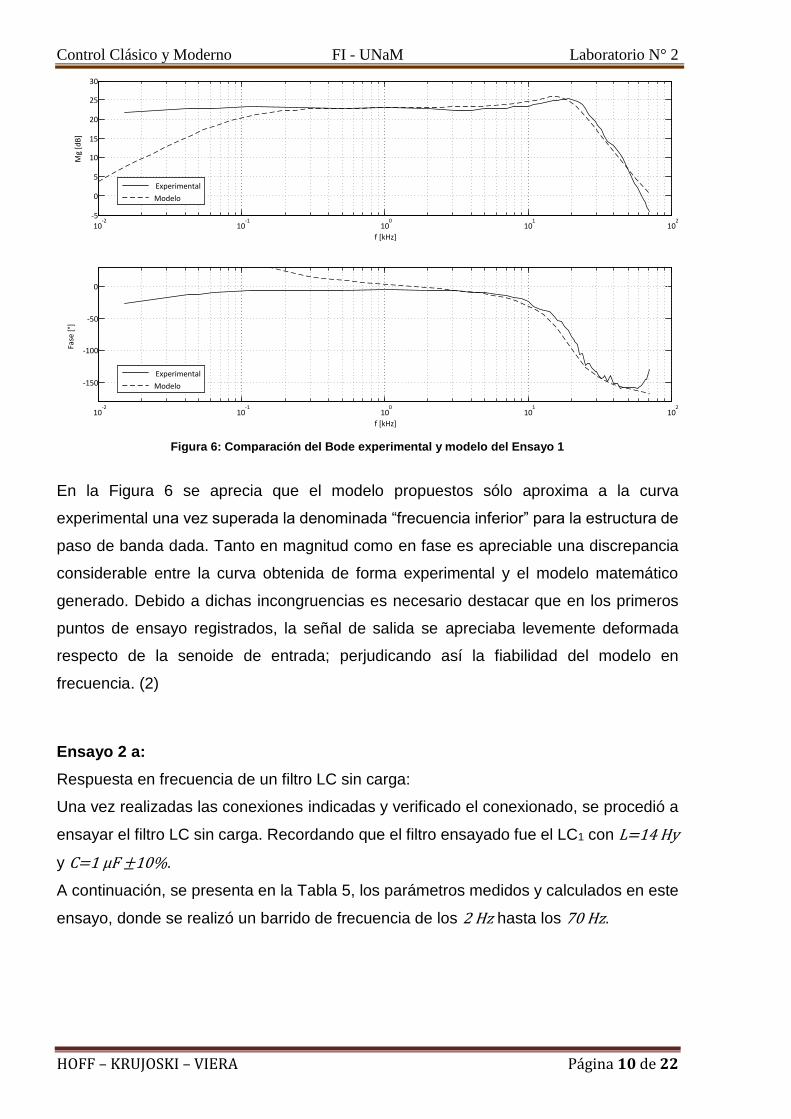
Figura 6: Comparación del Bode experimental y modelo del Ensayo 1
En la Figura 6 se aprecia que el modelo propuestos sólo aproxima a la curva
experimental una vez superada la denominada “frecuencia inferior” para la estructura de
paso de banda dada. Tanto en magnitud como en fase es apreciable una discrepancia
considerable entre la curva obtenida de forma experimental y el modelo matemático
generado. Debido a dichas incongruencias es necesario destacar que en los primeros
puntos de ensayo registrados, la señal de salida se apreciaba levemente deformada
respecto de la senoide de entrada; perjudicando así la fiabilidad del modelo en
frecuencia. (2)
Ensayo 2 a:
Respuesta en frecuencia de un filtro LC sin carga:
Una vez realizadas las conexiones indicadas y verificado el conexionado, se procedió a
ensayar el filtro LC sin carga. Recordando que el filtro ensayado fue el LC1 con L=14 Hy
y C=1 µF ±10%.
A continuación, se presenta en la Tabla 5, los parámetros medidos y calculados en este
ensayo, donde se realizó un barrido de frecuencia de los 2 Hz hasta los 70 Hz.
10-2
10-1
100
101
102
-5
0
5
10
15
20
25
30
f [kHz]
Mg
[dB
]
10-2
10-1
100
101
102
-150
-100
-50
0
f [kHz]
Fase
[°]
Experimental
Modelo
Experimental
Modelo
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 11 de 22
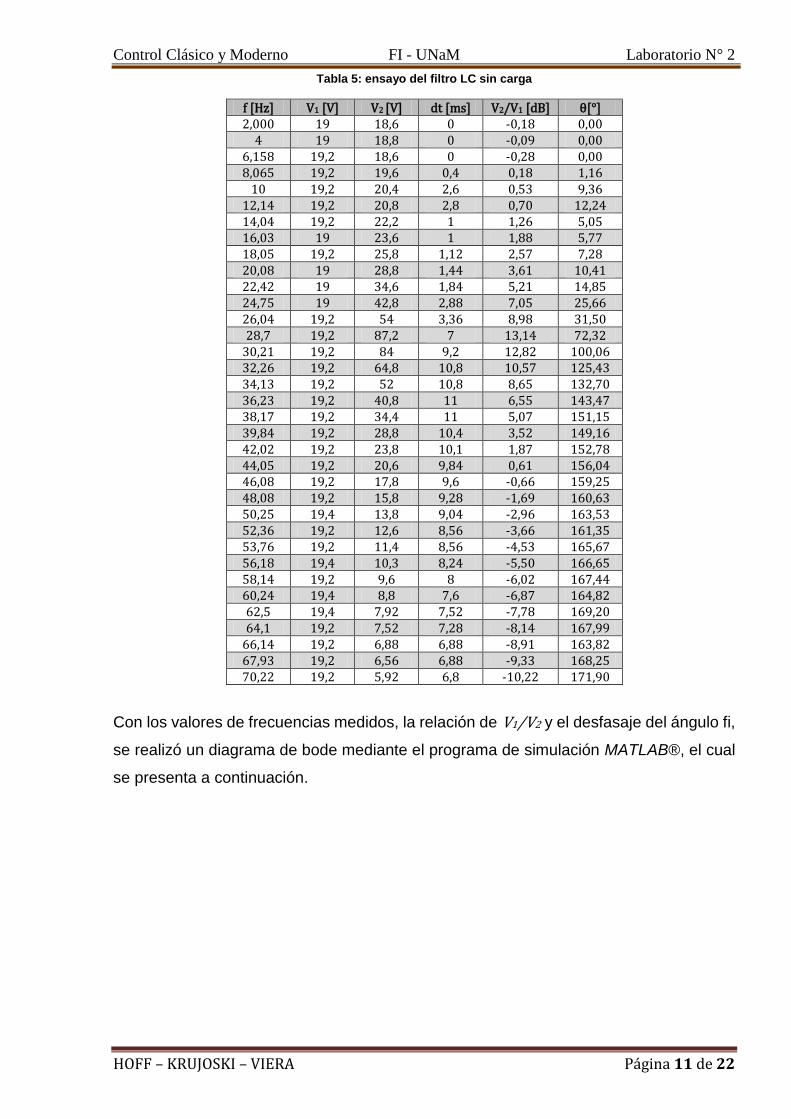
Tabla 5: ensayo del filtro LC sin carga
f [Hz] V1 [V] V2 [V] dt [ms] V2/V1 [dB] θ[°] 2,000 19 18,6 0 -0,18 0,00
4 19 18,8 0 -0,09 0,00 6,158 19,2 18,6 0 -0,28 0,00 8,065 19,2 19,6 0,4 0,18 1,16
10 19,2 20,4 2,6 0,53 9,36 12,14 19,2 20,8 2,8 0,70 12,24 14,04 19,2 22,2 1 1,26 5,05 16,03 19 23,6 1 1,88 5,77 18,05 19,2 25,8 1,12 2,57 7,28 20,08 19 28,8 1,44 3,61 10,41 22,42 19 34,6 1,84 5,21 14,85 24,75 19 42,8 2,88 7,05 25,66 26,04 19,2 54 3,36 8,98 31,50 28,7 19,2 87,2 7 13,14 72,32
30,21 19,2 84 9,2 12,82 100,06 32,26 19,2 64,8 10,8 10,57 125,43 34,13 19,2 52 10,8 8,65 132,70 36,23 19,2 40,8 11 6,55 143,47 38,17 19,2 34,4 11 5,07 151,15 39,84 19,2 28,8 10,4 3,52 149,16 42,02 19,2 23,8 10,1 1,87 152,78 44,05 19,2 20,6 9,84 0,61 156,04 46,08 19,2 17,8 9,6 -0,66 159,25 48,08 19,2 15,8 9,28 -1,69 160,63 50,25 19,4 13,8 9,04 -2,96 163,53 52,36 19,2 12,6 8,56 -3,66 161,35 53,76 19,2 11,4 8,56 -4,53 165,67 56,18 19,4 10,3 8,24 -5,50 166,65 58,14 19,2 9,6 8 -6,02 167,44 60,24 19,4 8,8 7,6 -6,87 164,82 62,5 19,4 7,92 7,52 -7,78 169,20 64,1 19,2 7,52 7,28 -8,14 167,99
66,14 19,2 6,88 6,88 -8,91 163,82 67,93 19,2 6,56 6,88 -9,33 168,25 70,22 19,2 5,92 6,8 -10,22 171,90
Con los valores de frecuencias medidos, la relación de V1/V2 y el desfasaje del ángulo fi,
se realizó un diagrama de bode mediante el programa de simulación MATLAB®, el cual
se presenta a continuación.
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 12 de 22
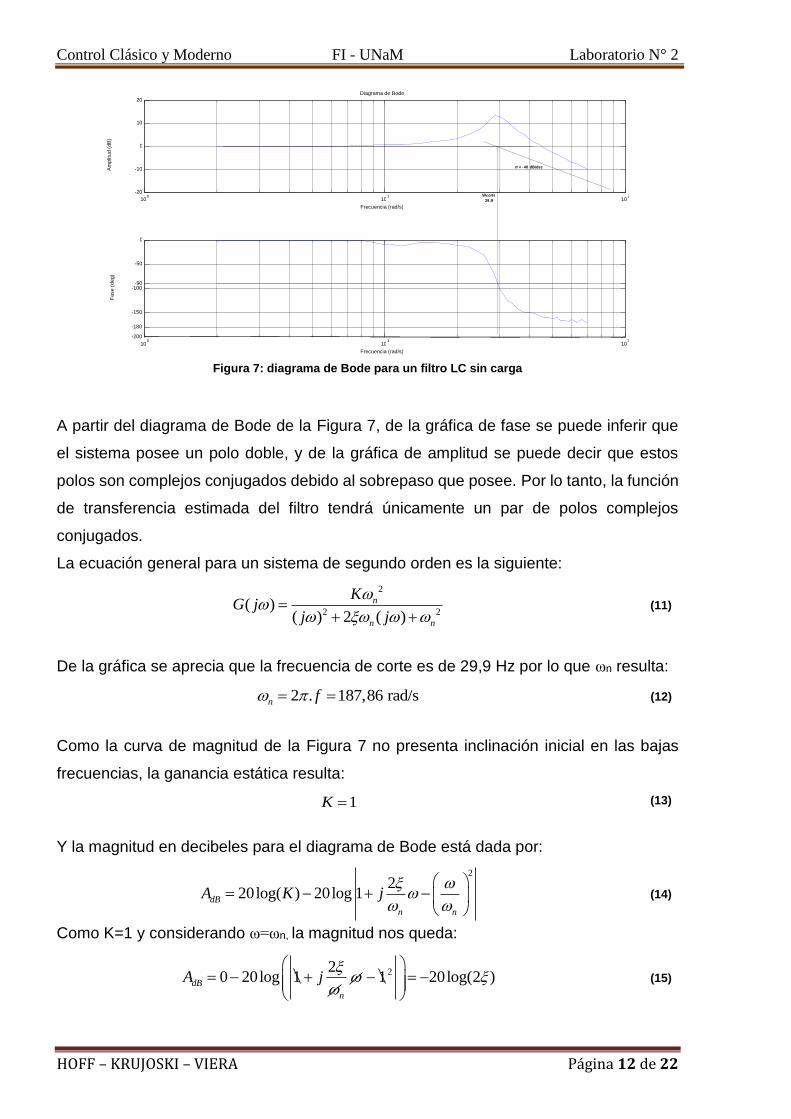
Figura 7: diagrama de Bode para un filtro LC sin carga
A partir del diagrama de Bode de la Figura 7, de la gráfica de fase se puede inferir que
el sistema posee un polo doble, y de la gráfica de amplitud se puede decir que estos
polos son complejos conjugados debido al sobrepaso que posee. Por lo tanto, la función
de transferencia estimada del filtro tendrá únicamente un par de polos complejos
conjugados.
La ecuación general para un sistema de segundo orden es la siguiente:
2
2 2( )
( ) 2 ( )
n
n n
KG j
j j
(11)
De la gráfica se aprecia que la frecuencia de corte es de 29,9 Hz por lo que ωn resulta:
2 . 187,86 rad/sn f (12)
Como la curva de magnitud de la Figura 7 no presenta inclinación inicial en las bajas
frecuencias, la ganancia estática resulta:
1K (13)
Y la magnitud en decibeles para el diagrama de Bode está dada por:
2
220log( ) 20log 1dB
n n
A K j
(14)
Como K=1 y considerando ω=ωn, la magnitud nos queda:
220 20log 1 1 20log(2 )dB
n
A j
(15)
10 0 10 1 10 2 -20
-10
0
10
20
Frecuencia (rad/s)
Am
plit
ud (
dB
) Diagrama de Bode
10 0 10 1 10 2 -200 -180 -150
-100 -90
-50
0
Frecuencia (rad/s)
Fase (
deg)
Wcorte 29 . 9
m = - 40 dB / dec
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 13 de 22
Midiendo en la gráfica el valor del pico de resonancia AdB y despejando ξ se tiene:
20log(2 ) 13,14 0,11dBA (16)
Reemplazando en la (11) los valores de los parámetros hallados se tiene que la función
de transferencia estimada del filtro es:
2
35294,1( )
( ) 41,33( ) 35294,1G j
j j
(17)
Finalmente, sustituyendo la variable j ω por s tenemos la función de transferencia del filtro
2
35294,1( )
41,33. 35294,1G s
s s
(18)
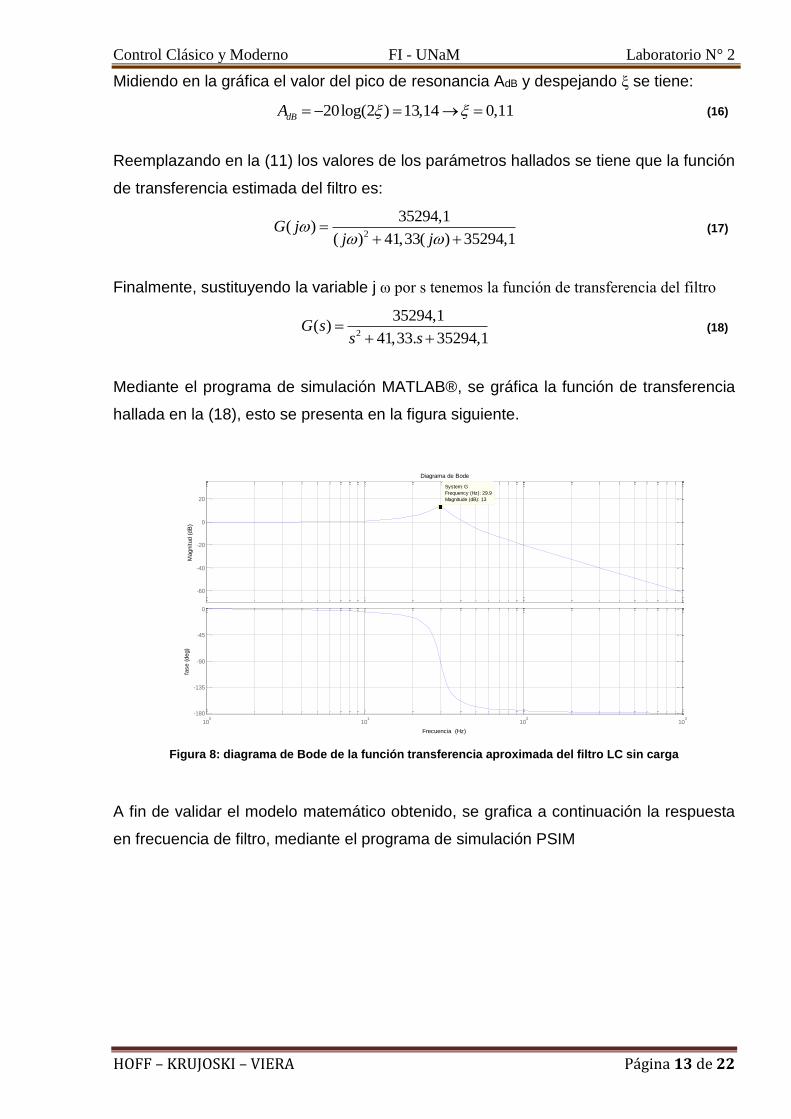
Mediante el programa de simulación MATLAB®, se gráfica la función de transferencia
hallada en la (18), esto se presenta en la figura siguiente.
Figura 8: diagrama de Bode de la función transferencia aproximada del filtro LC sin carga
A fin de validar el modelo matemático obtenido, se grafica a continuación la respuesta
en frecuencia de filtro, mediante el programa de simulación PSIM
100
101
102
103
-180
-135
-90
-45
0
fase (
deg)
Diagrama de Bode
Frecuencia (Hz)
-60
-40
-20
0
20
System: G
Frequency (Hz): 29.9
Magnitude (dB): 13
Magnitud (
dB
)
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 14 de 22
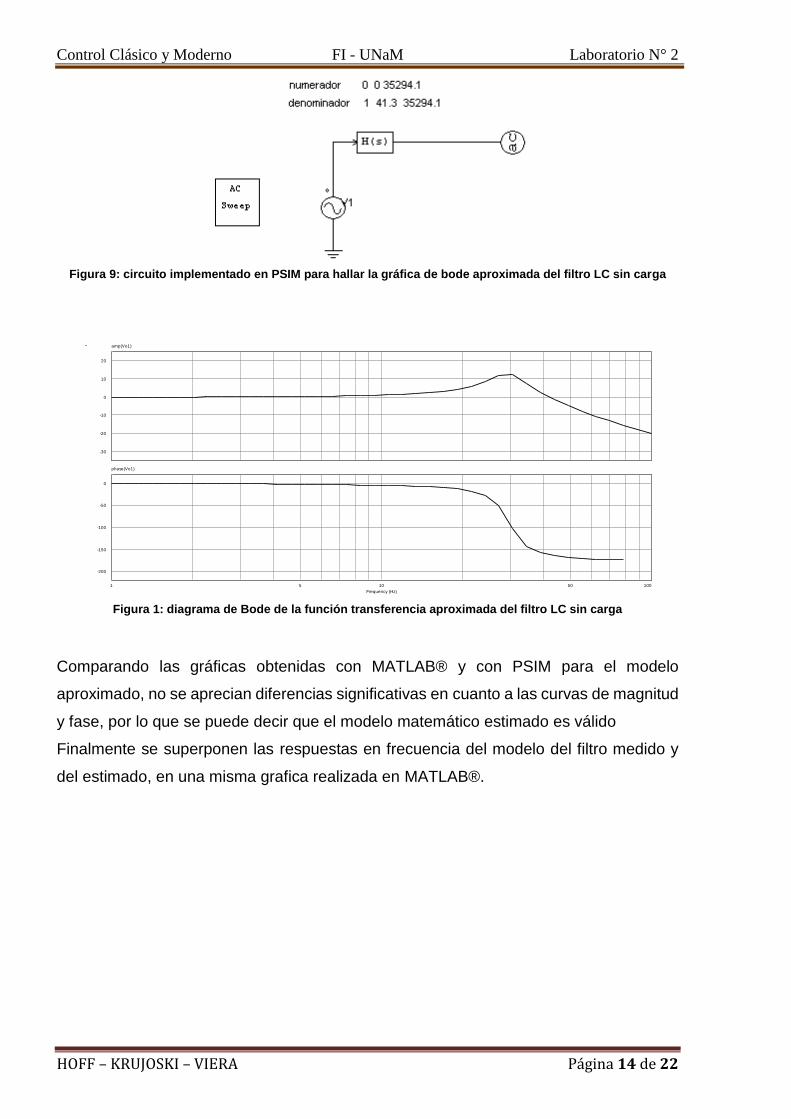
Figura 9: circuito implementado en PSIM para hallar la gráfica de bode aproximada del filtro LC sin carga
Figura 1: diagrama de Bode de la función transferencia aproximada del filtro LC sin carga
Comparando las gráficas obtenidas con MATLAB® y con PSIM para el modelo
aproximado, no se aprecian diferencias significativas en cuanto a las curvas de magnitud
y fase, por lo que se puede decir que el modelo matemático estimado es válido
Finalmente se superponen las respuestas en frecuencia del modelo del filtro medido y
del estimado, en una misma grafica realizada en MATLAB®.
0
-10
-20
-30
10
20
amp(Vo1)
1 5 10 50 100
Frequency (Hz)
0
-50
-100
-150
-200
phase(Vo1)

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 15 de 22
Figura 10: diagrama de Bode de la función transferencia medida y aproximada del filtro LC sin carga
En la figura anterior, se han superpuesto las respuestas de magnitud y fase del modelo
medido y del estimado. De esta grafica se puede ver que la aproximación de la función
de transferencia copia con buena precisión a la función de transferencia de la planta real.
Se puede decir que la aproximación describe las características reales del filtro.
A continuación se exponen los script utilizados en MATLAB® con los cuales se
obtuvieron las gráficas antes expuestas.
clc
close all
clear all
W=[2.000 4 6.158 8.065 10 12.14 14.04 16.03 18.05 20.08 22.42 24.75 26.04
28.7 30.21 32.26 34.13 36.23 38.17 39.84 42.02 44.05 46.08 48.08 50.25
52.36 53.76 56.18 58.14 60.24 62.5 64.1 66.14 67.93 70.22];
amp=[-0.18 -0.09 -0.28 0.18 0.53 0.70 1.26 1.88 2.57 3.61 5.21 7.05 8.98
13.14 12.82 10.57 8.65 6.55 5.07 3.52 1.87 0.61 -0.66 -1.69 -2.96 -3.66
-4.53 -5.50 -6.02 -6.87 -7.78 -8.14 -8.91 -9.33 -10.22];
fase=[0.00 0.00 0.00 1.16 9.36 12.24 5.05 5.77 7.28 10.41 14.85 25.66
31.50 72.32 100.06 125.43 132.70 143.47 151.15 149.16 152.78 156.04 159.25
160.63 163.53 161.35 165.67 166.65 167.44 164.82 169.20 167.99 163.82
168.25 171.90];
recta=(-90)*ones(1,length(fase));
subplot(2,1,1)
semilogx(W,amp)
grid on
subplot(2,1,2)
semilogx(W,-fase, W, recta)
grid on
Figura 11: script utilizado en Matlab para obtener diagrama de Bode para un filtro LC sin carga
-80
-60
-40
-20
0
20
Magnitud (
dB
)
100
101
102
103
-180
-135
-90
-45
0
fase (
deg)
Diagrama de Bode
Frecuencia (Hz)

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 16 de 22
clc
close all
clear all
G=tf([35294.1],[1 41.33 35294.1]);
bode(G);
grid on
Figura 12: script utilizado en Matlab para obtener diagrama de Bode de la función transferencia
aproximada del filtro LC sin carga
clc
close all
clear all
W=[2.000 4 6.158 8.065 10 12.14 14.04 16.03 18.05 20.08 22.42 24.75 26.04
28.7 30.21 32.26 34.13 36.23 38.17 39.84 42.02 44.05 46.08 48.08 50.25
52.36 53.76 56.18 58.14 60.24 62.5 64.1 66.14 67.93 70.22];
amp=[-0.18 -0.09 -0.28 0.18 0.53 0.70 1.26 1.88 2.57 3.61 5.21 7.05 8.98
13.14 12.82 10.57 8.65 6.55 5.07 3.52 1.87 0.61 -0.66 -1.69 -2.96 -3.66
-4.53 -5.50 -6.02 -6.87 -7.78 -8.14 -8.91 -9.33 -10.22];
f=[0.00 0.00 0.00 1.16 9.36 12.24 5.05 5.77 7.28 10.41 14.85 25.66 31.50
72.32 100.06 125.43 132.70 143.47 151.15 149.16 152.78 156.04 159.25
160.63 163.53 161.35 165.67 166.65 167.44 164.82 169.20 167.99
163.82 168.25 171.90];
figure
semilogx(W,amp)
grid on
hold on
G=tf([35294.1],[1 41.33 35294.1]);
bode(G)
grid on
hold on
semilogx(W,-f)
grid on
Figura 13: script utilizado en Matlab para obtener el diagrama de Bode de la función transferencia medida
y aproximada del filtro LC sin carga
De este ensayo se puede concluir que el método de obtención de la función de
transferencia de una planta real, a partir de ensayos, es apropiado dado que las
respuestas obtenidas concuerdan con la planta real. Además es un método sencillo de
implementar en cuanto a mediciones y cálculos de los parámetros.
Cabe destacar que es conveniente tomar una cantidad mayor de datos en las altas
frecuencias para poder apreciar el modelo real con mayor facilidad y exactitud. Y de este
modo obtener una buena aproximación.
Ensayo 2 b:
Respuesta en frecuencia del filtro LC, con carga
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 17 de 22
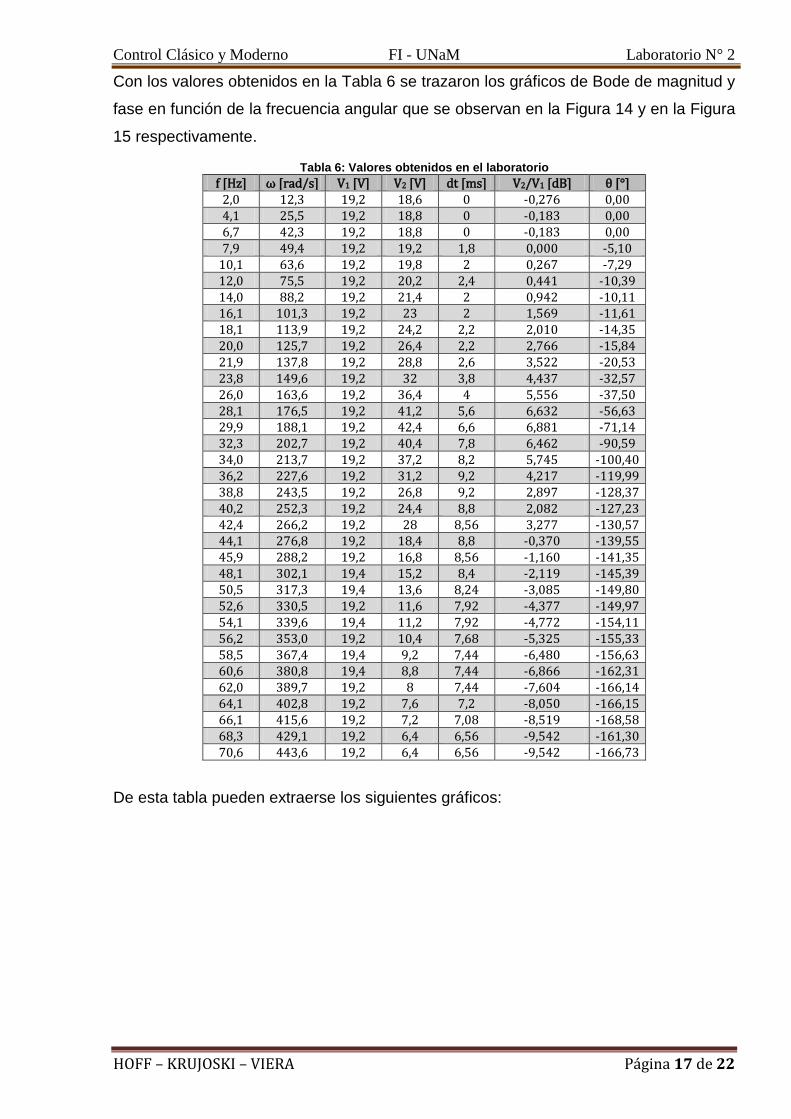
Con los valores obtenidos en la Tabla 6 se trazaron los gráficos de Bode de magnitud y
fase en función de la frecuencia angular que se observan en la Figura 14 y en la Figura
15 respectivamente.
Tabla 6: Valores obtenidos en el laboratorio f [Hz] ω [rad/s] V1 [V] V2 [V] dt [ms] V2/V1 [dB] θ [°]
2,0 12,3 19,2 18,6 0 -0,276 0,00 4,1 25,5 19,2 18,8 0 -0,183 0,00 6,7 42,3 19,2 18,8 0 -0,183 0,00 7,9 49,4 19,2 19,2 1,8 0,000 -5,10
10,1 63,6 19,2 19,8 2 0,267 -7,29 12,0 75,5 19,2 20,2 2,4 0,441 -10,39 14,0 88,2 19,2 21,4 2 0,942 -10,11 16,1 101,3 19,2 23 2 1,569 -11,61 18,1 113,9 19,2 24,2 2,2 2,010 -14,35 20,0 125,7 19,2 26,4 2,2 2,766 -15,84 21,9 137,8 19,2 28,8 2,6 3,522 -20,53 23,8 149,6 19,2 32 3,8 4,437 -32,57 26,0 163,6 19,2 36,4 4 5,556 -37,50 28,1 176,5 19,2 41,2 5,6 6,632 -56,63 29,9 188,1 19,2 42,4 6,6 6,881 -71,14 32,3 202,7 19,2 40,4 7,8 6,462 -90,59 34,0 213,7 19,2 37,2 8,2 5,745 -100,40 36,2 227,6 19,2 31,2 9,2 4,217 -119,99 38,8 243,5 19,2 26,8 9,2 2,897 -128,37 40,2 252,3 19,2 24,4 8,8 2,082 -127,23 42,4 266,2 19,2 28 8,56 3,277 -130,57 44,1 276,8 19,2 18,4 8,8 -0,370 -139,55 45,9 288,2 19,2 16,8 8,56 -1,160 -141,35 48,1 302,1 19,4 15,2 8,4 -2,119 -145,39 50,5 317,3 19,4 13,6 8,24 -3,085 -149,80 52,6 330,5 19,2 11,6 7,92 -4,377 -149,97 54,1 339,6 19,4 11,2 7,92 -4,772 -154,11 56,2 353,0 19,2 10,4 7,68 -5,325 -155,33 58,5 367,4 19,4 9,2 7,44 -6,480 -156,63 60,6 380,8 19,4 8,8 7,44 -6,866 -162,31 62,0 389,7 19,2 8 7,44 -7,604 -166,14 64,1 402,8 19,2 7,6 7,2 -8,050 -166,15 66,1 415,6 19,2 7,2 7,08 -8,519 -168,58 68,3 429,1 19,2 6,4 6,56 -9,542 -161,30 70,6 443,6 19,2 6,4 6,56 -9,542 -166,73
De esta tabla pueden extraerse los siguientes gráficos:
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 18 de 22
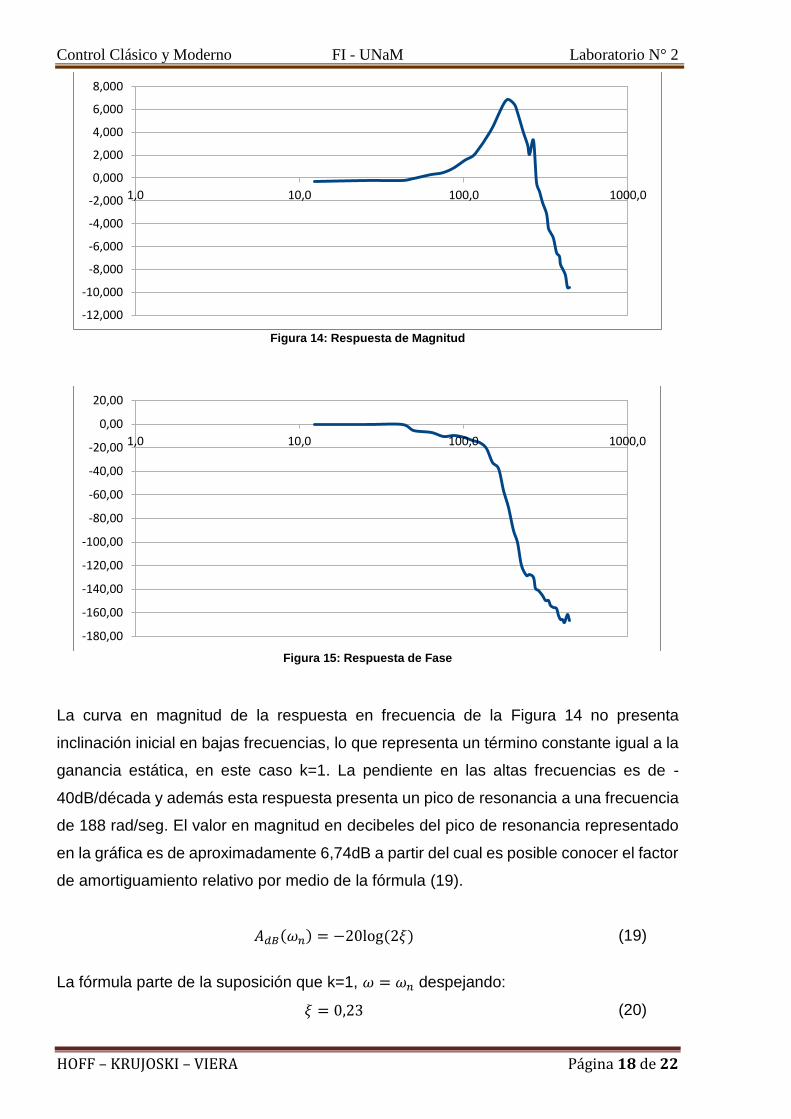
Figura 14: Respuesta de Magnitud
Figura 15: Respuesta de Fase
La curva en magnitud de la respuesta en frecuencia de la Figura 14 no presenta
inclinación inicial en bajas frecuencias, lo que representa un término constante igual a la
ganancia estática, en este caso k=1. La pendiente en las altas frecuencias es de -
40dB/década y además esta respuesta presenta un pico de resonancia a una frecuencia
de 188 rad/seg. El valor en magnitud en decibeles del pico de resonancia representado
en la gráfica es de aproximadamente 6,74dB a partir del cual es posible conocer el factor
de amortiguamiento relativo por medio de la fórmula (19).
𝐴𝑑𝐵(𝜔𝑛) = −20log (2𝜉) (19)
La fórmula parte de la suposición que k=1, 𝜔 = 𝜔𝑛 despejando:
𝜉 = 0,23 (20)
-12,000
-10,000
-8,000
-6,000
-4,000
-2,000
0,000
2,000
4,000
6,000
8,000
1,0 10,0 100,0 1000,0
-180,00
-160,00
-140,00
-120,00
-100,00
-80,00
-60,00
-40,00
-20,00
0,00
20,00
1,0 10,0 100,0 1000,0
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 19 de 22
Ya que el factor de amortiguamiento relativo es menor a uno, los polos son complejos
conjugados.
La expresión en régimen permanente para un par de polos complejos conjugados puede
escribirse:
𝐺(𝑗𝜔) =𝑘
1 + 2𝑗𝜉
𝜔𝑛𝜔 + (𝑗
𝜔𝜔𝑛
)2
(21)
Reemplazando valores en la ecuación (21) tenemos:
𝐺(𝑗𝜔) =𝑘
1 + 2𝑗0,23188 𝜔 + (𝑗
𝜔188)2
(22)
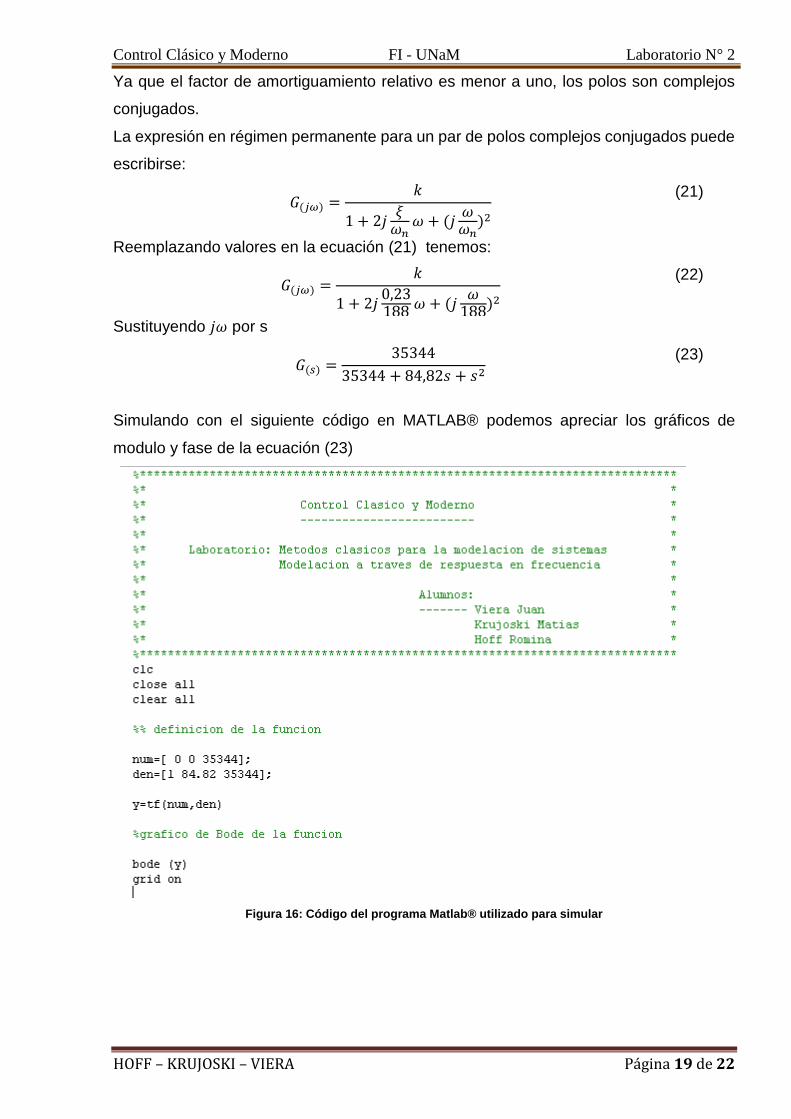
Sustituyendo 𝑗𝜔 por s
𝐺(𝑠) =35344
35344 + 84,82𝑠 + 𝑠2
(23)
Simulando con el siguiente código en MATLAB® podemos apreciar los gráficos de
modulo y fase de la ecuación (23)
Figura 16: Código del programa Matlab® utilizado para simular

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 20 de 22
Figura 17: Respuesta de la simulación con Matlab®
Con los gráficos mostrados en la figura pueden ser contrastados con los de las figuras
y así corroborar que la ecuación (23) está bien calculada.
Para simular se utilizó el software Psim mediante el circuito que se muestra en la figura
siguiente
Figura 18: Circuito utilizado para la simulación con Psim
Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 21 de 22
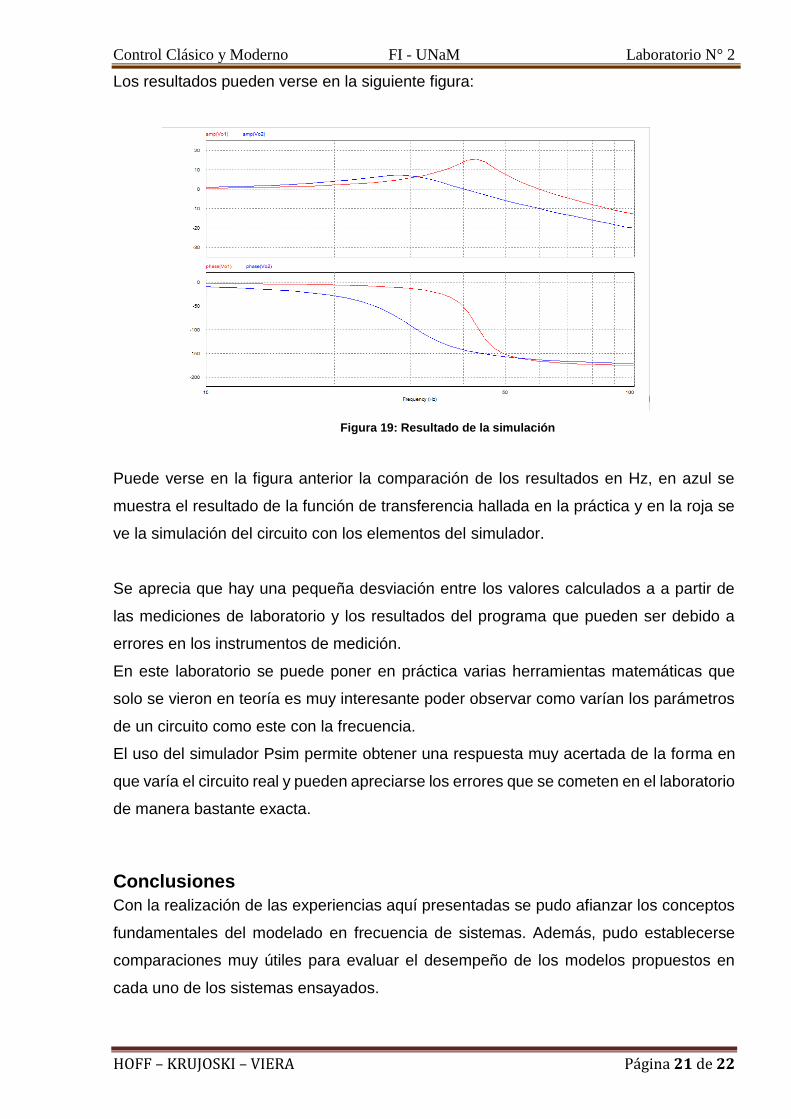
Los resultados pueden verse en la siguiente figura:
Figura 19: Resultado de la simulación
Puede verse en la figura anterior la comparación de los resultados en Hz, en azul se
muestra el resultado de la función de transferencia hallada en la práctica y en la roja se
ve la simulación del circuito con los elementos del simulador.
Se aprecia que hay una pequeña desviación entre los valores calculados a a partir de
las mediciones de laboratorio y los resultados del programa que pueden ser debido a
errores en los instrumentos de medición.
En este laboratorio se puede poner en práctica varias herramientas matemáticas que
solo se vieron en teoría es muy interesante poder observar como varían los parámetros
de un circuito como este con la frecuencia.
El uso del simulador Psim permite obtener una respuesta muy acertada de la forma en
que varía el circuito real y pueden apreciarse los errores que se cometen en el laboratorio
de manera bastante exacta.
Conclusiones
Con la realización de las experiencias aquí presentadas se pudo afianzar los conceptos
fundamentales del modelado en frecuencia de sistemas. Además, pudo establecerse
comparaciones muy útiles para evaluar el desempeño de los modelos propuestos en
cada uno de los sistemas ensayados.

Control Clásico y Moderno FI - UNaM Laboratorio N° 2
HOFF – KRUJOSKI – VIERA Página 22 de 22
Bibliografía
1. Botterón, Fernando, Fernández, Guillermo y Aguirre, Gabriel Y. Guía de
Laboratorio N° 2 - Modelación a través de la Respuesta en Frecuencia. Oberá, Misiones,
Argentina : Facultad de Ingeniería - UNaM, Abril de 2014.
2. Botterón, F. Tema I - Modelación Experimental de Procesos. Electrónica, UNaM -
Facultad de Ingeniería. Oberá : s.n., 2014. Apunte de Cátedra.