MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y · PDF filecaracterística de la...
15
MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS PROF. Ing. Esp. Carlos A. Pérez UNIVERSIDAD NACIONAL EXPERIMENTAL “FRANCISCO DE MIRANDA” COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA DEPARTAMENTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN UNIDAD CURRICULAR: DINÁMICA Y CONTROL DE PROCESOS TEMA Nº 2 “MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS” PROFESORES: ING. ESP. CARLOS A. PÉREZ M.- PUNTO FIJO; JUNIO 2015
Transcript of MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y · PDF filecaracterística de la...

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
UNIVERSIDAD NACIONAL EXPERIMENTAL
“FRANCISCO DE MIRANDA”
COMPLEJO ACADÉMICO EL SABINO
PROGRAMA DE INGENIERÍA QUÍMICA
DEPARTAMENTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN
UNIDAD CURRICULAR: DINÁMICA Y CONTROL DE PROCESOS
TEMA Nº 2
“MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS
Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS”
PROFESORES:
ING. ESP. CARLOS A. PÉREZ M.-
PUNTO FIJO; JUNIO 2015
MODELADO DE SISTEMAS DINÁMICOS Y ESTÁTICO Y APLICACIÓN DE LAS MATEMÁTICAS A SISTEMAS DE
CONTROL
PROF. Ing. Esp. Carlos A. Pérez
INTRODUCCIÓN
Pierre Simón Marquéz de Laplace (1749-1827) matemático y astrónomo francés tan famoso en su tiempo que se le conocía como el Newton de Francia. Sus principales campos de interés fueron la Mecánica Celeste, o movimiento planetario, la teoría de probabilidades, y el progreso personal. Prueba de sus talentos son:
1. Mécanique Céleste monumental tratado en sobre cuestiones de gravitación publicado en cinco volúmenes entre los anos de 1799 y 1825. El principal legado de esta publicación reside en el desarrollo de la teoría de potencial, con implicaciones de largo alcance en ramas de la Física que van desde la gravitación, la mecánica de fluidos, el magnetismo y la física atómica.
2. Théorie Analytique des Probabilitésque se considera la más grande contribución a esa parte de las matemáticas. Como anécdota, el libro inicia con palabras que más o menos dicen "En el fondo, la teoría de probabilidades no es sino el sentido común reducido a cálculos", puede ser que sí, pero las 700 páginas que le siguen a es as palabras son un análisis intrincado, en el cual usa a discreción la transformada de Laplace, las funciones generatrices, y muchas otras técnicas no triviales.
3. Tras la Revolución Francesa, el talento político y la ambición de Laplace alcanzaron su cenit; Laplace se adaptaba demasiado fácilmente cambiando sus principios; yendo y viniendo entre lo republicano y monárquico emergiendo siempre con una mejor posición y un nuevo título.
4. Uno de los defectos principales que se le han atribuido en detrimento de su reputación es la omisión de toda referencia a los descubrimientos de sus predecesores y contemporáneos, dejando entrever que las ideas eran suyas del todo.
5. La ayuda prestada a los jóvenes talentos científicos fue un gran acierto; entre esos jóvenes se encuentran: el químico Gay-Lussac, el naturalista Humboldt, el físico Poisson, y al joven Cauchy, que estaría destinado a convertirse en uno de los artífices principales de las matemáticas del siglo XIX
La Transformada de Laplace es una técnica Matemática que forma parte de ciertas
transformadas integrales como la transformada de Fourier, la transformada de Hilbert, y la transformada de Mellin entre otras. Estas transformadas están definidas por medio de una integral impropia y cambian una función en una variable de entrada en otra función en otra variable. La transformada de Laplace puede ser usada para resolver Ecuaciones Diferenciales Lineales y Ecuaciones Integrales. Aunque se pueden resolver algún tipo de E.D. con coeficientes variables, en general se aplica a problemas con coeficientes constantes. Un requisito adicional es el conocimiento de las condiciones iníciales a la misma E.D. Su mayor ventaja sale a relucir cuando la función en la variable independiente que aparece en la E.D. es una función seccionada.

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
Cuando se resuelven E.D. usando la técnica de la transformada, se cambia una ecuación diferencial en un problema algebraico. La metodología consiste en aplicar la transformada a la E.D. y posteriormente usar las propiedades de la transformada. El problema de ahora consiste en encontrar una función en la variable independiente tenga una cierta expresión como transformada.
Se ha comprobado que las técnicas de transformada de Laplace y linealización son
particularmente útiles para el análisis de la dinámica de los procesos y diseño de sistemas de control, debido a que proporcionan una visi6n general del comportamiento de gran variedad de procesos e instrumentos. Por el contrario; la t6cnica de simulación por computadora permite realizar un análisis preciso y detallado del comportamiento dinámico de sistemas específicos, pero rara vez es posible generalizar para otros procesos los resultados obtenidos. (Corripio, Smith 1991).

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
TEMA Nº 2
“MODELADO DE SISTEMAS DINÁMICOS Y ESTACIONARIO Y APLICACIÓN DE LAS
MATEMÁTICAS A SISTEMAS DE CONTROL”
DESARROLLO DE UN MODELO MATEMÁTICO
Según McGraw Hill Dictionary of Scientifc and Technical Terms: “Modelo” es un sistema
físico o matemático, que obedeciendo a ciertas condiciones específicas, su comportamiento es
utilizado para comprender un sistema físico, biológico o social, al cual es análogo de cierta forma.
DEFINICIÓN DE TÉRMINOS:
- Parámetros: En el modelo son objetos o símbolos que representan a entidades o atribuciones
del sistema que permanecen constantes durante el estudio.
- Variables: Son objetos o símbolos en el modelo, que representan a entidades o atributos del
sistema que cambian en el tiempo durante el estudio.
- Relaciones funcionales: Son los procesos físicos o las relaciones entre los símbolos de un
modelo, que representan a las actividades y a las relaciones entre los elementos de un sistema.
ETAPAS EN LA QUE SE DESARROLLA UN MODELO MATEMÁTICO:
1 Descripción del fenómeno, planteándose las variables que intervienen y las hipótesis del
comportamiento.
2 Se plantean las ecuaciones que describen matemáticamente el fenómeno, las
condiciones de frontera y la variabilidad de solución.
3 Seleccionar el método de solución del modelo matemático es decir, la elección del
algoritmo de cálculo.
4 La programación del algoritmo de cálculo para un computador.
5 La calibración, verificación y validación del modelo.
6 La explotación del modelo, utilización del mismo con base en datos de campo, de
experimentos en laboratorios o de supuestos para obtener.
FUNCIÓN DE TRANSFERENCIA:
Una función de transferencia es un modelo matemático que a través de un cociente
relaciona la respuesta de un sistema (modelada) a una señal de entrada o excitación (también modelada). El cociente formado por los modelos de la señal de salida respecto de la señal de entrada, permite encontrar los ceros y los polos, respectivamente. Y que representan las raíces en las que cada uno de los modelos del cociente se iguala a cero. Es decir, representa la región frontera a la que no debe llegar ya sea la respuesta del sistema o la excitación al mismo; ya que de lo contrario llegará ya sea a la región nula o se irá al infinito, respectivamente.
MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
Uno de los primeros matemáticos en describir estos modelos fue Laplace, a través de su transformación matemática. Por definición una función de transferencia se puede determinar según la expresión:
Donde H(s) es la función de transferencia (también notada como G(s)); Y (s) es la
transformada de Laplace de la respuesta (salida) y U (s) es la transformada de Laplace de la señal de entrada.
“Se puede definir la función de transferencia como la relación de la transformada de Laplace de la variable de salida sobre la transferencia de Laplace de la variable de entrada”.
EIGENVALORES:
Se dice que el denominador de la función de transferencia del sistema es la ecuación característica de la ecuación diferencial y del sistema cuya respuesta dinámica representa. Sus raíces se conocen como eigenvalores (del alemán eigenvalues, que significa valores “característicos” o “propios”) de la ecuación diferencial, y cuyo significado es que son, por definición, característicos de la ecuación diferencial e independiente de la función de forzamiento de entrada.
DIAGRAMAS DE BLOQUES:
Un diagrama de bloques de un sistema es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de señales. Tal diagrama muestra las relaciones existentes entre los diversos componentes. A diferencia de una representación matemática puramente abstracta, un diagrama de bloques tiene la ventaja de indicar en forma más realista el flujo de las señales del sistema real.
En un diagrama de bloques se enlazan una con otra todas las variables del sistema, mediante bloques funcionales. El bloque funcional o simplemente bloque es un símbolo para representar la operación matemática que sobre la señal de entrada hace el bloque para producir la salida. Las funciones de transferencia de los componentes por lo general se introducen en los bloques correspondientes, que se conectan mediante flechas para indicar la dirección del flujo de señales. Observe que la señal sólo puede pasar en la dirección de las flechas. Por tanto, un diagrama de bloques de un sistema de control muestra explícitamente una propiedad unilateral.
Las ventajas de la representación mediante diagramas de bloques de un sistema estriban en que es fácil formar el diagrama de bloques general de todo el sistema con sólo conectar los bloques de los componentes de acuerdo con el flujo de señales y en que es posible evaluar la contribución de cada componente al desempeño general del sistema.
En general, la operación funcional del sistema se aprecia con más facilidad si se examina el

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
diagrama de bloques que si se revisa el sistema físico mismo. Un diagrama de bloques contiene información relacionada con el comportamiento dinámico, pero no incluye información de la construcción física del sistema. En consecuencia, muchos sistemas diferentes y no relacionados pueden representarse mediante el mismo diagrama de bloques.
Debe señalarse que, en un diagrama de bloques, la principal fuente de energía no se muestra explícitamente y que el diagrama de bloques de un sistema determinado no es único. Es posible dibujar varios diagramas de bloques diferentes para un sistema, dependiendo del punto de vista del análisis.
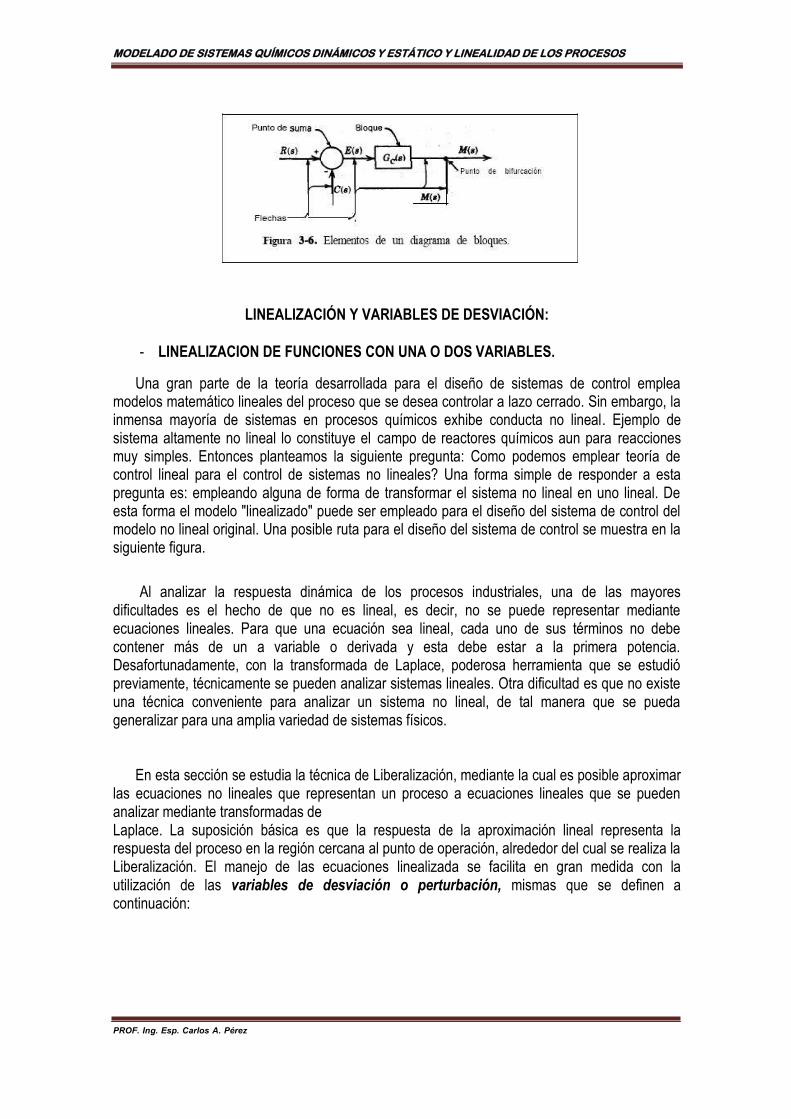
ELEMENTOS DE UN DIAGRAMA DE BLOQUES:
En general los diagramas de bloques constan de cuatro elementos básicos: 1.- FLECHAS:
Indican en general el flujo de información, cada punta de flecha índica la dirección del
flujo de información. 2.- PUNTOS DE SUMA:
El círculo con una equis (x) es el símbolo utilizado para indicar una operación de suma, el signo positivo o negativo indica si la señal debe sumarse o restarse.
3.- PUNTOS DE BIFURCACIÓN:
Es aquel a partir del cual la señal va de modo concurrente a otros bloques o puntos de
suma.
4.- BLOQUES:
Representan la operación matemática, en forma de f unción de transferencia.
MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
LINEALIZACIÓN Y VARIABLES DE DESVIACIÓN:
- LINEALIZACION DE FUNCIONES CON UNA O DOS VARIABLES.
Una gran parte de la teoría desarrollada para el diseño de sistemas de control emplea modelos matemático lineales del proceso que se desea controlar a lazo cerrado. Sin embargo, la inmensa mayoría de sistemas en procesos químicos exhibe conducta no lineal. Ejemplo de sistema altamente no lineal lo constituye el campo de reactores químicos aun para reacciones muy simples. Entonces planteamos la siguiente pregunta: Como podemos emplear teoría de control lineal para el control de sistemas no lineales? Una forma simple de responder a esta pregunta es: empleando alguna de forma de transformar el sistema no lineal en uno lineal. De esta forma el modelo "linealizado" puede ser empleado para el diseño del sistema de control del modelo no lineal original. Una posible ruta para el diseño del sistema de control se muestra en la siguiente figura.
Al analizar la respuesta dinámica de los procesos industriales, una de las mayores dificultades es el hecho de que no es lineal, es decir, no se puede representar mediante ecuaciones lineales. Para que una ecuación sea lineal, cada uno de sus términos no debe contener más de un a variable o derivada y esta debe estar a la primera potencia. Desafortunadamente, con la transformada de Laplace, poderosa herramienta que se estudió previamente, técnicamente se pueden analizar sistemas lineales. Otra dificultad es que no existe una técnica conveniente para analizar un sistema no lineal, de tal manera que se pueda generalizar para una amplia variedad de sistemas físicos.
En esta sección se estudia la técnica de Liberalización, mediante la cual es posible aproximar las ecuaciones no lineales que representan un proceso a ecuaciones lineales que se pueden analizar mediante transformadas de Laplace. La suposición básica es que la respuesta de la aproximación lineal representa la respuesta del proceso en la región cercana al punto de operación, alrededor del cual se realiza la Liberalización. El manejo de las ecuaciones linealizada se facilita en gran medida con la utilización de las variables de desviación o perturbación, mismas que se definen a continuación:

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
- VARIABLES DE DESVIACIÓN: Se define la variable de desviación, X (t), como la diferencia entre el valor de la variable o
señal x(t) y su valor en el punto de operación. Matemáticamente se define:
Donde X(t): variable de desviación. x(t): variable absoluta correspondiente
x : El valor de x en el punto de operación (valor base)
Gráfico de las variables de desviación, variable absoluta y el punto de operación. La aproximación lineal es tangente a la función no lineal en el valor base,
MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
MODELADO DINÁMICO Y ESTÁTICO DE PROCESOS QUÍMICOS:
Modelar un proceso químico es una actividad muy sintética, lo que requiere el uso de los principios
básicos de la ciencia de la ingeniería química, tales como balance de masa, cinética, termodinámica,
fenómenos de transporte, etc. Para el diseño de controladores para un proceso químico, el modelado es
un paso muy importante.
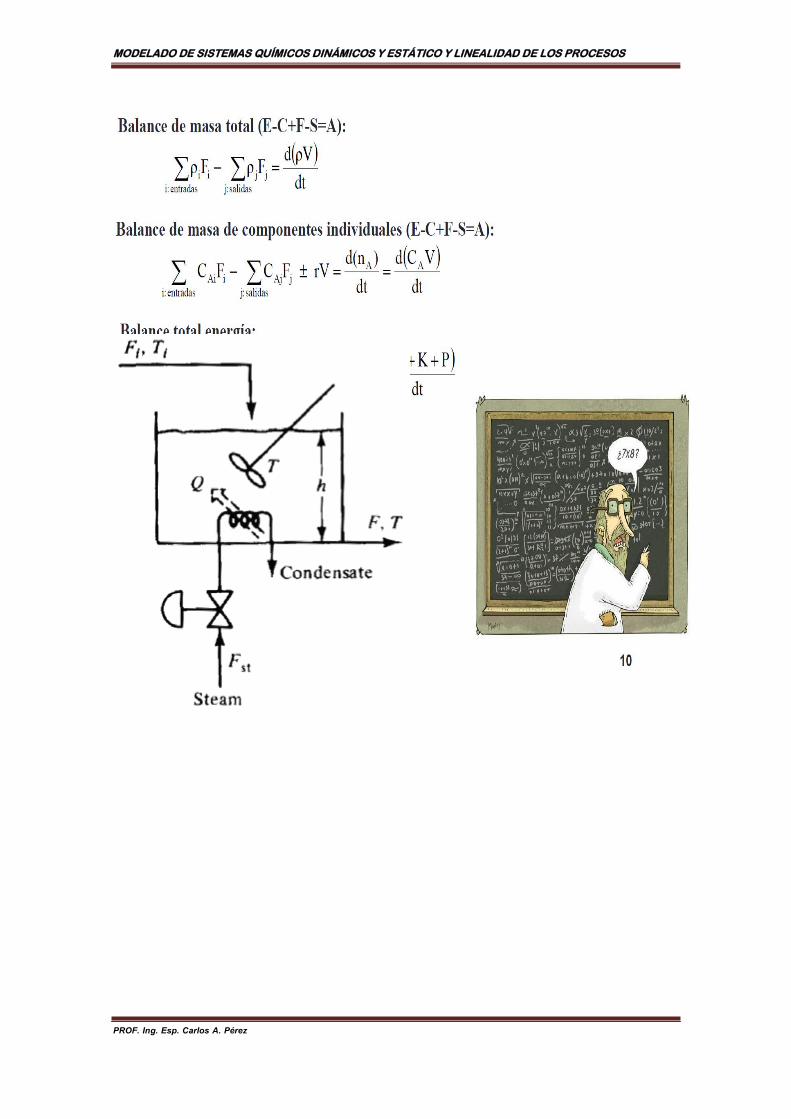
VARIABLES DE ESTADO Y ECUACIONES DE ESTADO DE UN PROCESO QUÍMICO Con el fin de caracterizar un sistema de procesamiento (tanque calentador, reactor por lotes,
columna de destilación, intercambiadores de calor, etc) y su comportamientos necesitamos:
1. Un conjunto de cantidades que dependen fundamentalmente de valores que describen el
estado natural de un sistema dado (valores en estado estacionario).
2. Un conjunto de ecuaciones con las variables anteriores, que se describe cómo el estado
natural de los cambios en el sistema dado con el tiempo.
EL PRINCIPIO DE CONSERVACIÓN DE LA CANTIDAD DE S ESTABLECE QUE:
La cantidad S puede ser cualquiera de las siguientes cantidades fundamentales:
*Masa total
*Masa de componentes individuales
*La energía total
*Momento
MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
ECUACIONES DE VELOCIDAD DE TRANSPORTE DE CALOR
La cantidad de calor Q suministrado por el vapor al líquido en el tanque calentador está dada por
la siguiente ecuación de velocidad de transferencia de calor:
Dónde:
U = coeficiente global de transferencia de calor
AT = área total de transferencia de calor
Tst = temperatura del vapor
T = temperatura
ECUACIONES DE LAS VELOCIDADES CINÉTICAS
La velocidad de reacción de una reacción de primer orden que tiene lugar en un CSTR está dada
por:
Dónde:
ko = constante cinética preexponencial
r = velocidad de reacción
E = energía de activación para la reacción
R = constante de los gases ideales
T = temperatura
CA = concentración del líquido del componente A en la reacción.

MODELADO DE SISTEMAS QUÍMICOS DINÁMICOS Y ESTÁTICO Y LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
GUIA DE EJERCICIOS
1.- Linealizar las siguientes funciones respecto a la variable que se indica, el resultado debe
estar en términos de variable de desviación.
a) y(x)
; donde α, volatilidad relativa, es constante
1 ( 1)x
b) f (pv ) Cv
pv
; Cv y G son constantes
G
c) Q(T) = ε.σ.A.T4 ; donde ε,σ y A son constantes
d) y(x,T , p) p(T ) .x p
a) K(T) = Ko.e-(E/RT)
b) A(h,w) = h.w
h) (P,T )
M .P
;
R.T
i) f (x, y) y
2 x 2x ln y
j) f (x, y) 3
x 2sen(xy)
y k) f (x,y) = yx
donde p(T ) eAB /(T C ) donde ko, E y R son constantes Donde M y R son constantes
2.- Del tanque agitado con
serpentín de la figura. Donde Fi y
F son los caudales volumétricos.
Determine las ecuaciones
fundamentales de masa y
energía, los cuales proporcionan
la información sobre el
calentador:
(a) La masa total del líquido
en el tanque

MODELADO DE SISTEMAS QUÍMICOS
DINÁMICOS Y ESTÁTICO Y
LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
(b) (b) La energía total del
material en el tanque
3. Considere el siguiente reactor
de tanque agitado continuo que
se muestra en la figura. Se da
una reacción exotérmica sencilla
A produce B dentro del reactor,
que es a su vez es enfriado por
un líquido refrigerante que fluye a
través de la chaqueta que esta
alrededor del reactor.
Realice el modelo matemático
correspondiente a:
(a) La masa total de la mezcla de
reacción en el tanque
(b) Masa de producto químico A
en la mezcla de reacción
(c) La energía total de la mezcla
de reacción en el tanque

MODELADO DE SISTEMAS QUÍMICOS
DINÁMICOS Y ESTÁTICO Y
LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
4. Dos corrientes 1 y 2 se
mezclan en un tanque bien
agitado, produciendo una
corriente de producto 3 (ver
figura). Cada una de las dos
corrientes de alimentación se
compone de dos componentes, A
y B, con concentraciones molares
CA1, CB1 y CA2, CB2,
respectivamente. También sean
F1 y F2 los caudales volumétricos
de la dos corrientes (ft3/min o
m3/min) y T1 y T2 sus
temperaturas correspondientes.
Por último, sean CA3, CB3, F3,
T3 las concentraciones, el flujo y
la temperatura de la corriente de
productos. Un serpentín también
se sumerge en el líquido del
tanque y que se utiliza para
suministrar calor al sistema con
vapor de agua, o eliminar el calor
con agua de refrigeración.
Describir en el proceso de
mezclado:
(a) La masa total en el
tanque

MODELADO DE SISTEMAS QUÍMICOS
DINÁMICOS Y ESTÁTICO Y
LINEALIDAD DE LOS PROCESOS
PROF. Ing. Esp. Carlos A. Pérez
(b) Las cantidades de los
componentes A y B en el
tanque
(c) la energía total