MODELADO MATEMÁTICOS DE SISTEMAS DE …isidrolazaro.com/wp-content/.../CAPITULO-2-CONTROL... ·...
45
MODELADO MATEMÁTICOS DE SISTEMAS DE CONTROL Unidad II CONTROL ANALÓGICO I
Transcript of MODELADO MATEMÁTICOS DE SISTEMAS DE …isidrolazaro.com/wp-content/.../CAPITULO-2-CONTROL... ·...

MODELADO MATEMÁTICOS DE SISTEMAS DE CONTROLUnidad II
CONTROL ANALÓGICO I

Modelado de sistemas
� Con la finalidad de diseñar y analizar el comportamiento dinámico de un sistema físico, es necesario obtener modelos matemáticos cuantitativos de ellos.matemáticos cuantitativos de ellos.
� Ejemplos de sistemas mecánicos

Modelado Cont.
� Ejemplos de sistemas

Modelado Cont.

� La mayoría de los sistemas de interés en el área de control son de naturaleza dinámica, la forma general de una ecuación diferencial lineal de orden n es:ecuación diferencial lineal de orden n es:
Donde:u es la entrada del sistemay es la salida del sistema
1 1
1 0 1 01 1
( ) ( ) ( ) ( )... ( ) .. ( )
− −
− −− −+ + + = + + +n n m m
n n m mn n m m
d y t d y t d u t d u ta a a y t b b b u t
dt dt dt dt

Representación
1 11 0 1 0... ...n n m m
n n m ma y a y a y b u b u b u− −− −+ + + = + + +
� Ademása0,a1,…,an y b0, b1,…,bm son constantes o
funciones del tiempo.
1 0 1 0n n m m− −
Tipos de sistemas
� Para los sistemas físicos , además:� Si los coeficientes son constantes, se trata de
sistemas lineales invariantes en el tiempo (SLIT), por ejemplo: redes eléctricas, sistemas
n m≥
(SLIT), por ejemplo: redes eléctricas, sistemas de suspensión de automóviles, motores eléctricos, etc.
� Si los coeficientes son variables, se les llama sistemas variantes en el tiempo (SLVT), como ejemplo tenemos: aviones, hornos, cohetes, etc.

Ejemplos
� Analice cada ecuación diferencial y determine tipo de sistema al que pertenece.
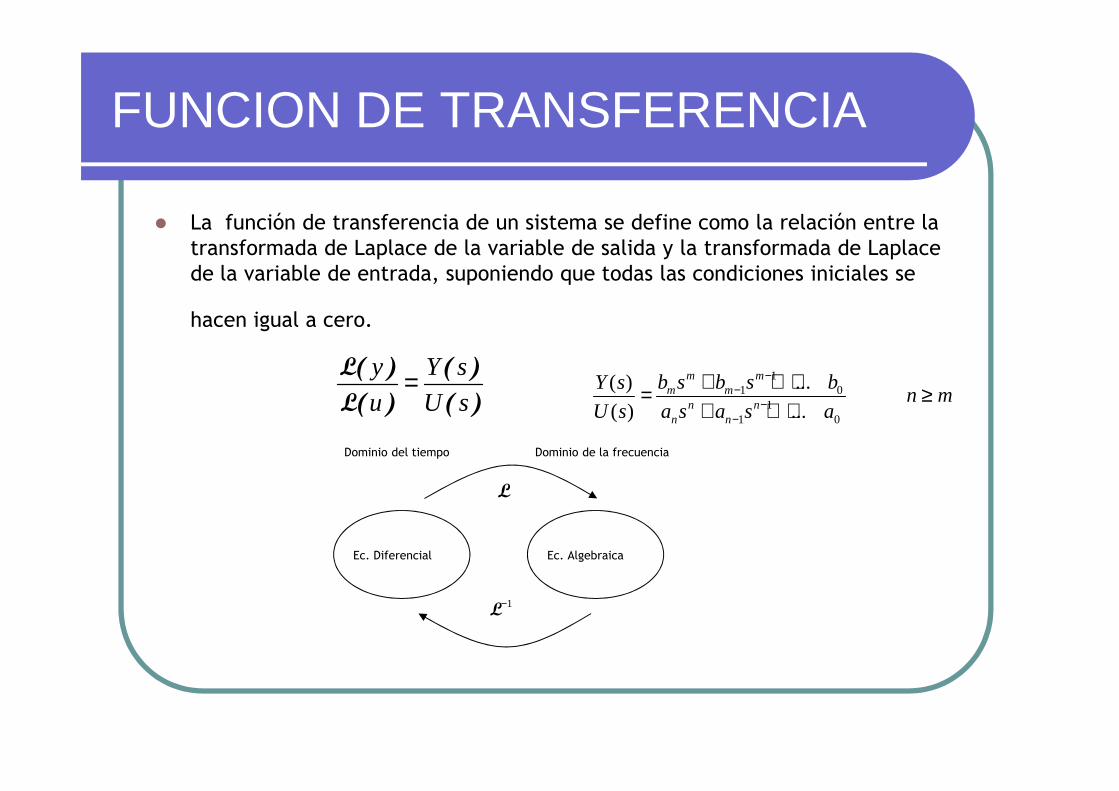
FUNCION DE TRANSFERENCIA
� La función de transferencia de un sistema se define como la relación entre la transformada de Laplace de la variable de salida y la transformada de Laplace de la variable de entrada, suponiendo que todas las condiciones iniciales se
hacen igual a cero.
=L( ) ( )
L( ) ( )
y Y s
u U s1
1 0...( ) m mm mb s b s bY s
n m−
−+ + += ≥=L( ) ( )u U s
Ec. Diferencial Ec. Algebraica
Dominio del tiempo Dominio de la frecuencia
L
1−L
1 01
1 0( ) ...m m
n nn n
n mU s a s a s a
−−
−
= ≥+ + +
� De hecho, la transformada de Laplace permite resolver ecuaciones diferenciales lineales mediante la transformación en ecuaciones algebraicas con lo cual se facilita su estudio.
¿Por qué Transformada de Laplace?
su estudio.
� Una vez que se ha estudiado el comportamiento de los sistemas dinámicos, se puede proceder a diseñar y analizar los sistemas de control de manera simple.

Ejemplos: Obtención de función de transferencia
� Obtener la función de transferencia de los siguientes sistemas así como los polos y ceros de la misma.

OBTENCIÓN DE F.T DE SISTEMAS
� Considere un circuito eléctrico RC de la figura 2.3, aplique las leyes de voltajes de kirchhoff para obtener la ecuación diferencial que rige la dinámica del sistema y a partir de esta determine la función de transferencia del circuito
considerando como salida Vo(t) y como entrada Vi(t).
R
Vi (t)
+
-
Ci(t) Vo(t)
+
-
Aplicando la ley de voltajes de Kirchhoff
0( ) ( ) ( ) 0iV t i t R V t− − =

Filtro pasa-bajas
Frecuencia de corte

� Además
0
1( ) ( )V t i t dt
C= ∫ 0 ( )
( )dV t
i t Cdt
=
Sustituyendo las ecuaciones anteriores en la primeraSustituyendo las ecuaciones anteriores en la primera
00
( )( ) ( ) 0− − =i
dV tV t RC V t
dt
00
( )( ) ( )+ = i
dV tRC V t V t
dt

� Aplicando
0 0( ) ( ) ( )+ = iE s RCsE s E s
Factorizando y reacomodando
L
0 ( ) 1
( ) 1i
E s
E s RCs=
+
1s
RC= −
Obsérvese que el polo del sistema está localizado en.

Función de Transferencia de Elementos en Cascada
� Se dice que dos elementos están en cascada, cuando la salida del primero corresponde a la entrada del segundo.
Hay dos casos:Hay dos casos:1. Si los elementos no se cargan.2. Si el segundo elemento produce un
efecto de carga sobre el primero, es decir, si el segundo elemento toma cierta cantidad de potencia del primero.

� En el primer caso se puede obtener una función de transferencia del sistema simplemente eliminando la salida y entrada intermedias.entrada intermedias.
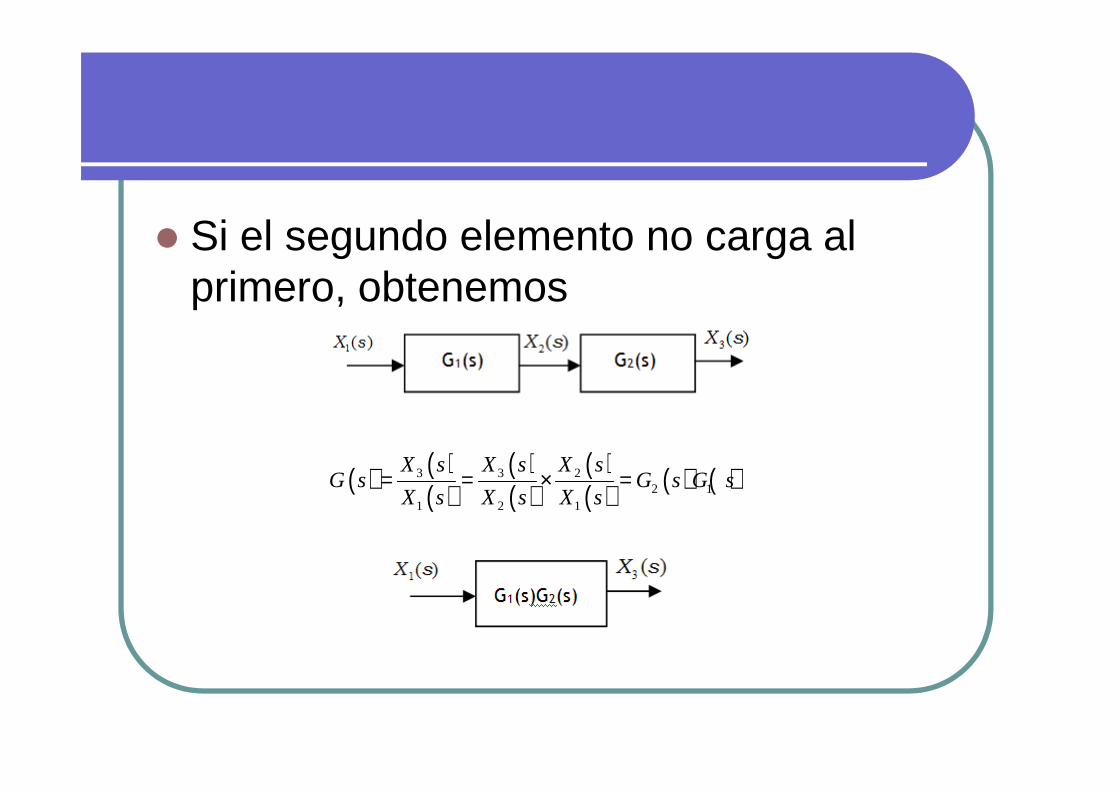
� Si el segundo elemento no carga al primero, obtenemos
( ) ( )( )
( )( )
( )( ) ( ) ( )3 3 2
2 11 2 1
X s X s X sG s G s G s
X s X s X s= = × =
Ejemplo
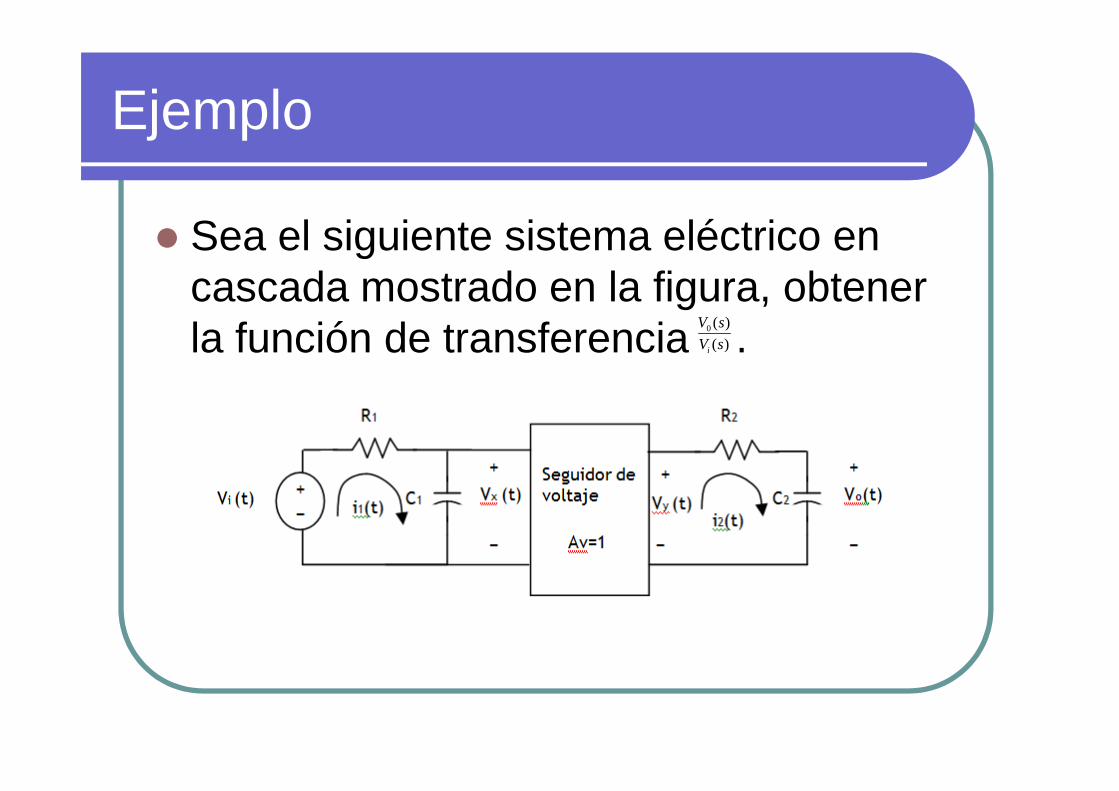
� Sea el siguiente sistema eléctrico en cascada mostrado en la figura, obtener la función de transferencia .0 ( )
( )i
V s
V s
Diagramas de bloques
� Esta representación gráfica permite describir de manera clara el funcionamiento de un sistema real (amplificadores, control de motores, (amplificadores, control de motores, circuitos eléctricos, servomecanismo, hornos, etc.), debido a que muestra como se realiza el flujo de señales dentro del mismo.
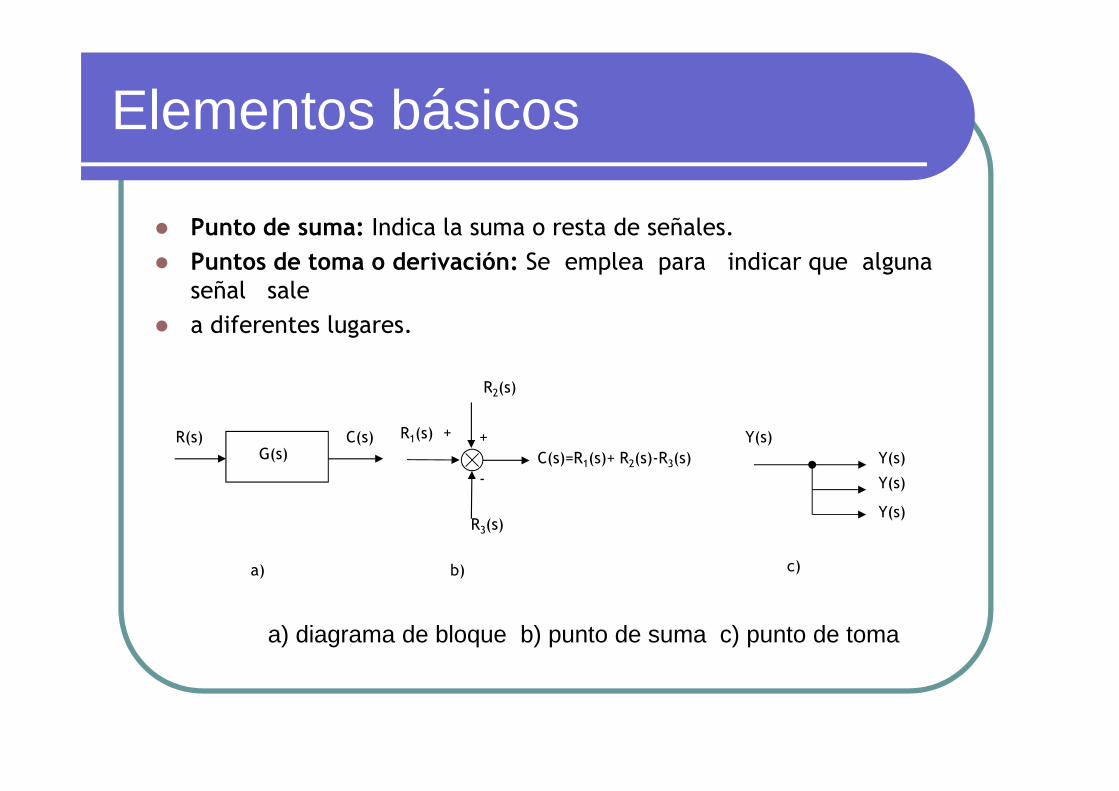
Elementos básicos
� Punto de suma: Indica la suma o resta de señales.
� Puntos de toma o derivación: Se emplea para indicar que alguna señal sale
� a diferentes lugares.
R2(s)
+
-
+G(s)
C(s)R(s)
R2(s)
R1(s)
R3(s)
C(s)=R1(s)+ R2(s)-R3(s)
Y(s)
Y(s)
Y(s)
Y(s)
a) b) c)
a) diagrama de bloque b) punto de suma c) punto de toma

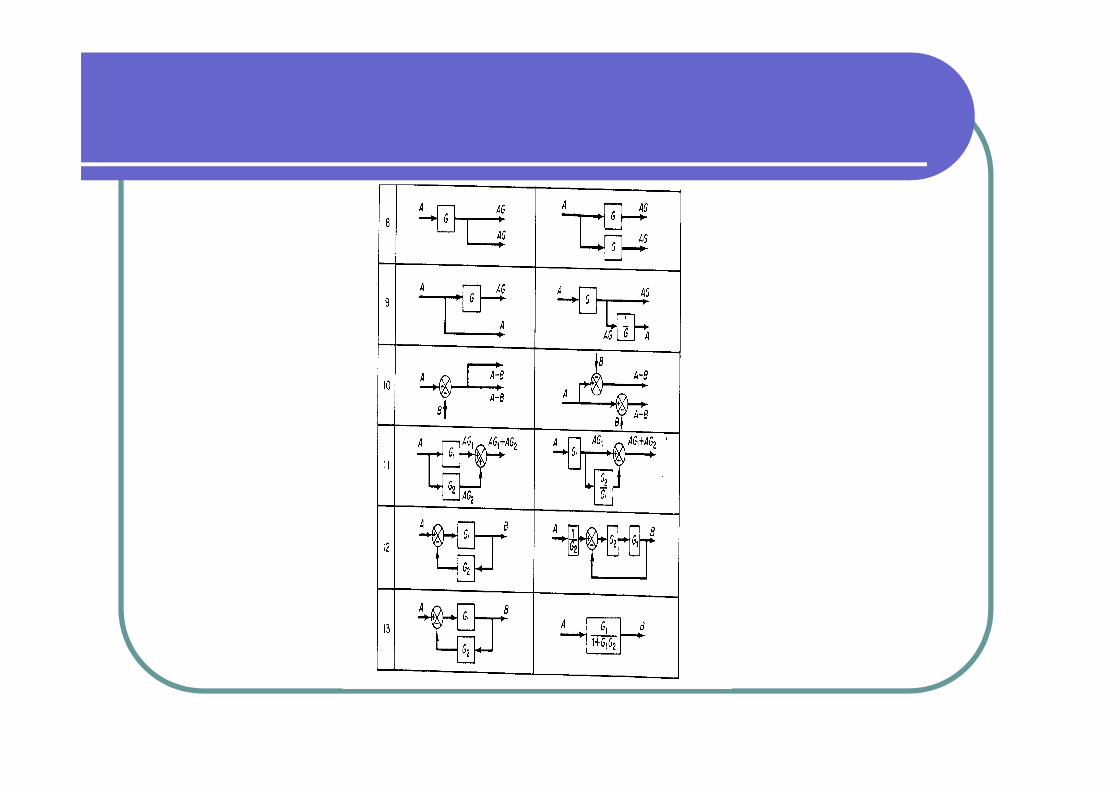
Reglas para reducir diagramas de bloques
� Una regla para simplificar un diagrama de bloques consiste en desplazar los puntos de toma hacia la salida y los puntos de suma hacia la entrada e ir reduciendo los lazos internos de retroalimentación aplicando las reglas de las tablas siguientes.
En toda simplificación de diagrama de bloques se deben cumplir las siguientes reglas básicas.
� El producto de F.T. a lo largo de un trayecto desde la entrada hasta la salida (siguiendo el sentido de las flechas) debe permanecer constante.
� El producto de F.T. a lo largo de un lazo también debe permanecer constante.


Ejemplo
( )
( )
Y s
R s
Y(s)
R(s)
+ +-
2 ( )H s
Reduzca el diagrama de bloques mostrado en la figura y obtenga la función de transferencia
Y(s)+
-
+
-
-
1( )G s 2 ( )G s 3( )G s
1( )H s
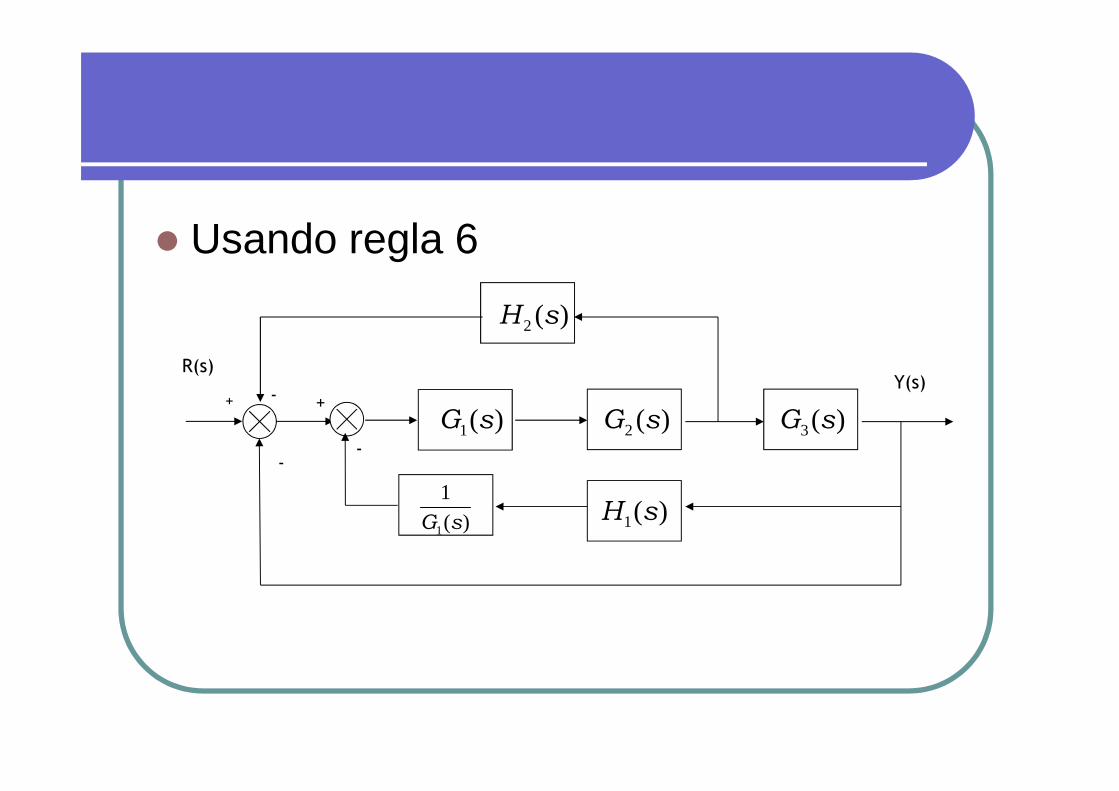
� Usando regla 6
Y(s)R(s)
+ +-
2 ( )H s
+
-
+
-
-
1
1
( )G s
1( )G s
1( )H s
2 ( )G s 3( )G s

� Ahora a partir de la regla 9 y 4 obtenemos el sistema mostrado
Y(s)R(s) +
-
+
-
-
1( )
( )
H s
G s
1 2( ) ( )G s G s3 ( )G s
2 ( )H s
3
1
( )G s
1( )G s
De igual forma usando la regla 4 al esquema de la figura obtenemos
Y(s)R(s) +
-
+
-
-
1
1
( )
( )
H s
G s
1 2 3( ) ( ) ( )G s G s G s
2
3
( )
( )
H s
G s

� Por regla 13 y 2 aplicada a la figura obtenemos
Y(s)R(s) +
-
+-
2
3
( )
( )
H s
G s
1 2 3
11 2 3
1
( ) ( ) ( )
( )1 ( ) ( ) ( )
( )
G s G s G s
H sG s G s G s
G s
+
Simplificando vía regla 13 el sistema de la figura llegamos al esquema mostrado
Y(s)R(s) +
-
1 2 3
2 3 1
1 2 3 2
2 3 1 3
( ) ( ) ( )1 ( ) ( ) ( )
( ) ( ) ( ) ( )1 ( ) ( ) ( ) ( )
G s G s G s
G s G s H s
G s G s G s H s
G s G s H s G s
+ +
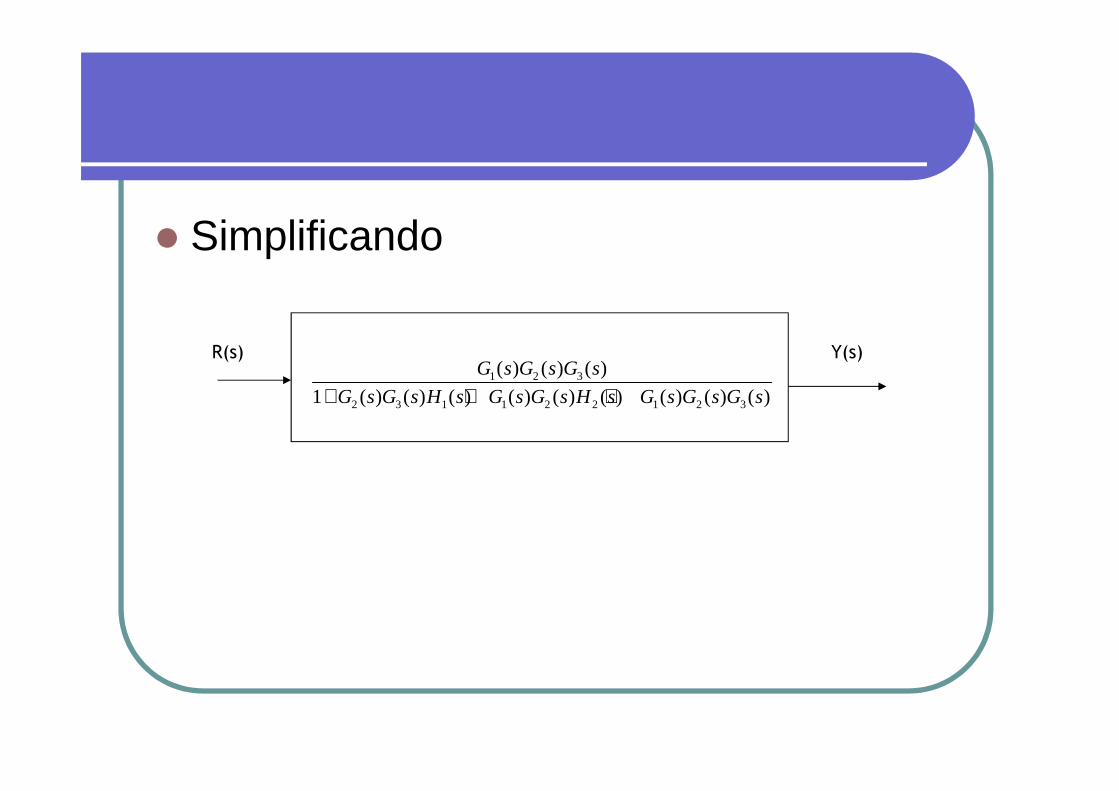
� Simplificando
Y(s)R(s)1 2 3( ) ( ) ( )
1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )+ + +G s G s G s
G s G s H s G s G s H s G s G s G s2 3 1 1 2 2 1 2 31 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )+ + +G s G s H s G s G s H s G s G s G s
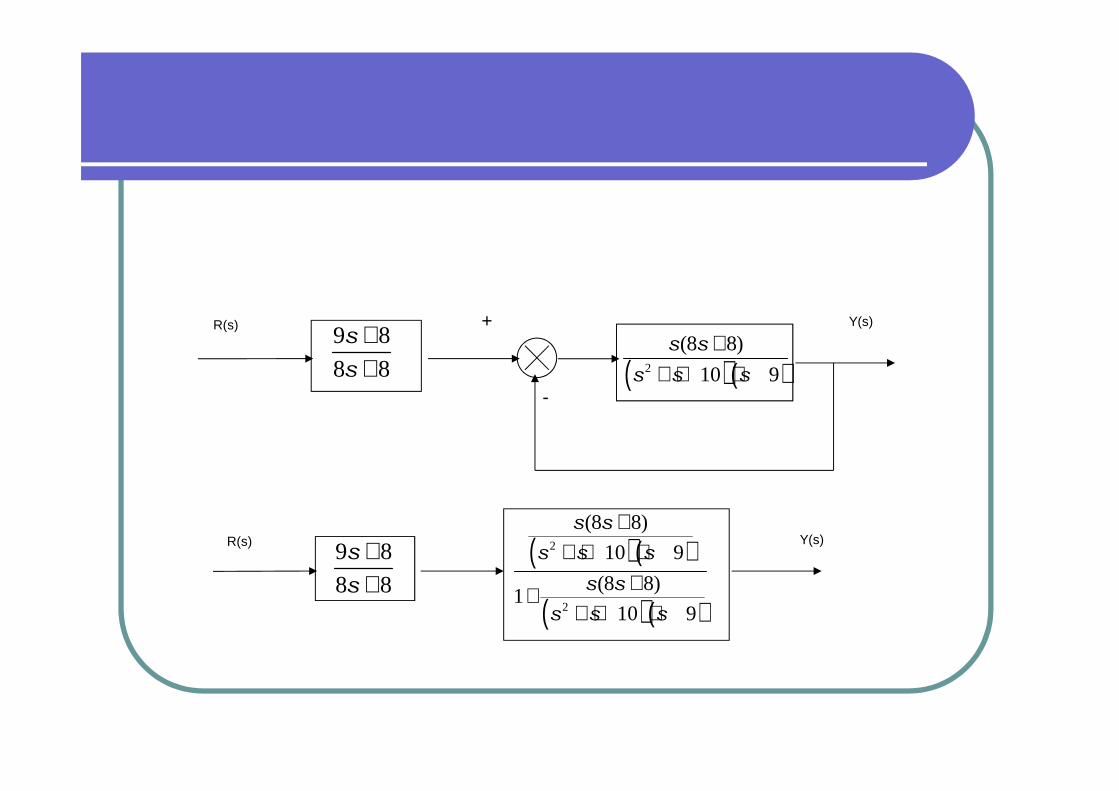
Ejemplo
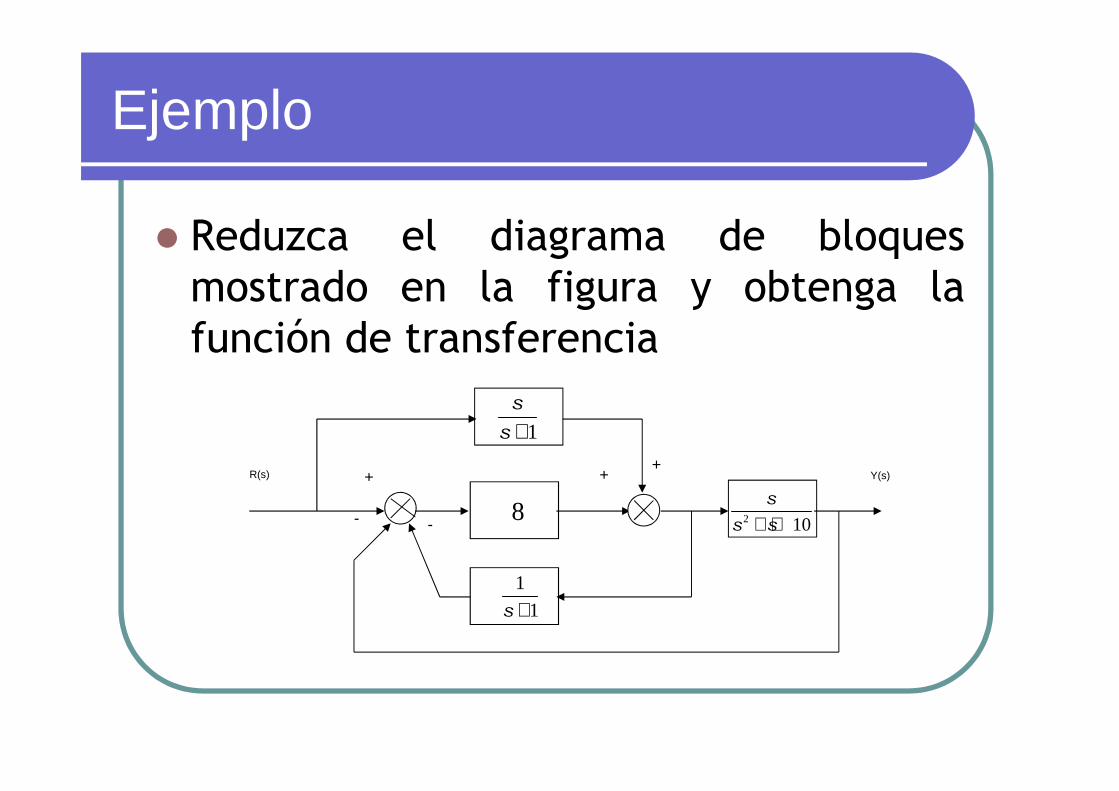
� Reduzca el diagrama de bloques mostrado en la figura y obtenga la función de transferencia
s
Y(s)R(s) +
-
++
8 2 10
s
s s+ +
1
1s +
1
s
s +
-

solución
� Por regla #9
R(s) + ++
1
s
s +
Y(s)R(s) +
-
+
8 2 10
s
s s+ +
1
1s +
-
2 10s s
s
+ +
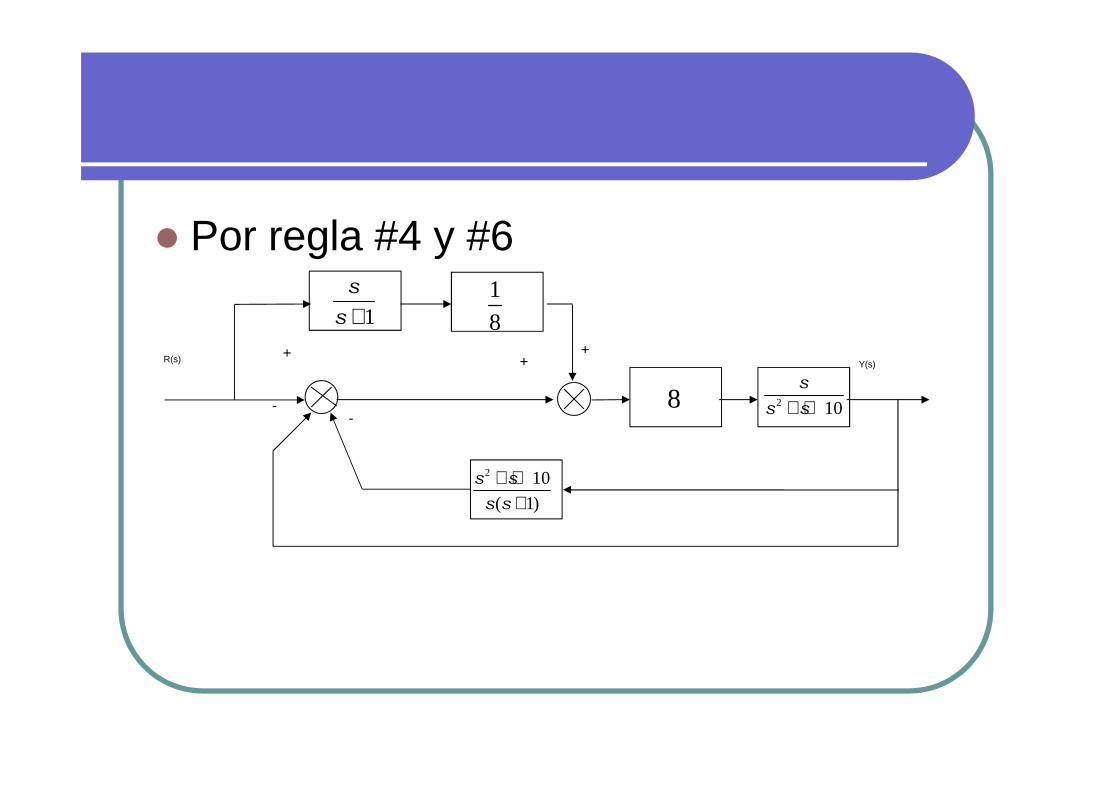
� Por regla #4 y #6
Y(s)R(s) ++
+
1
8
s
1
s
s +
8- 2 10s s+ +-
2 10
( 1)
s s
s s
+ ++
8

� Por Regla #1
Y(s)+++
8 8
s
s +
Y(s)R(s) +
-
+
2
8
10
s
s s+ +-
2 10
( 1)
s s
s s
+ ++
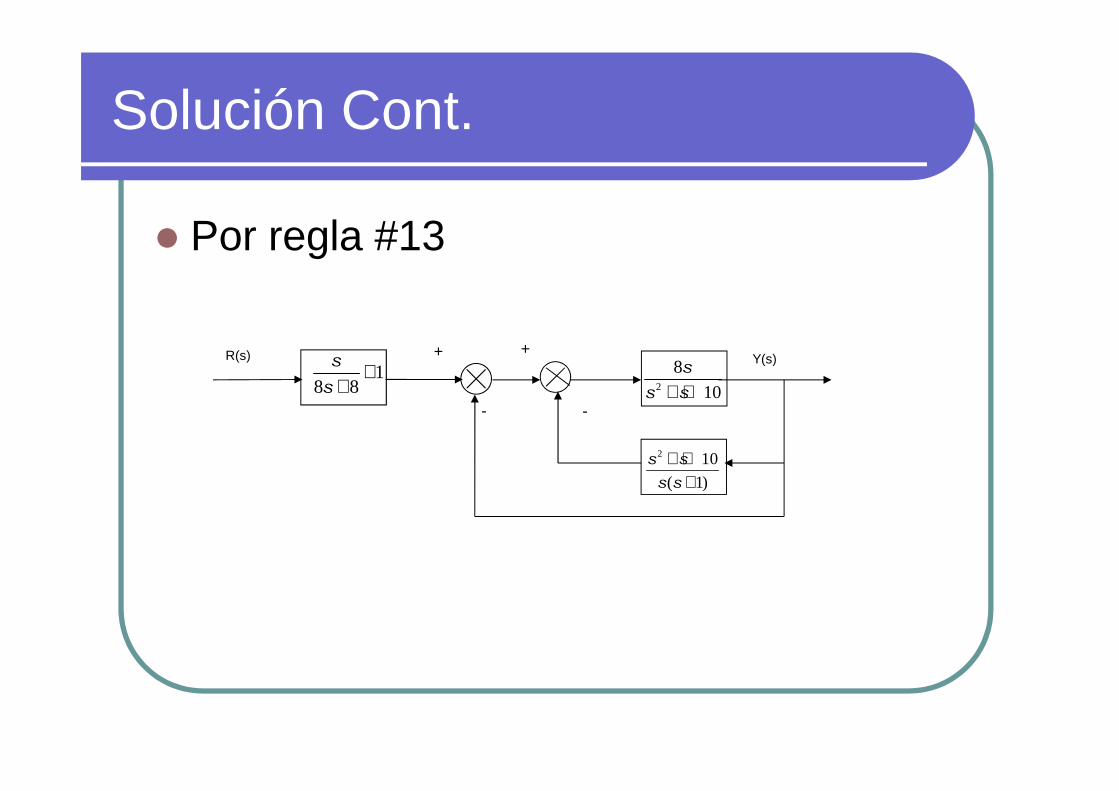
Solución Cont.
� Por regla #13
Y(s)R(s) ++
2
8
10
s
s s+ +1
8 8
s
s+
+-
10s s+ +8 8s +-
2 10
( 1)
s s
s s
+ ++
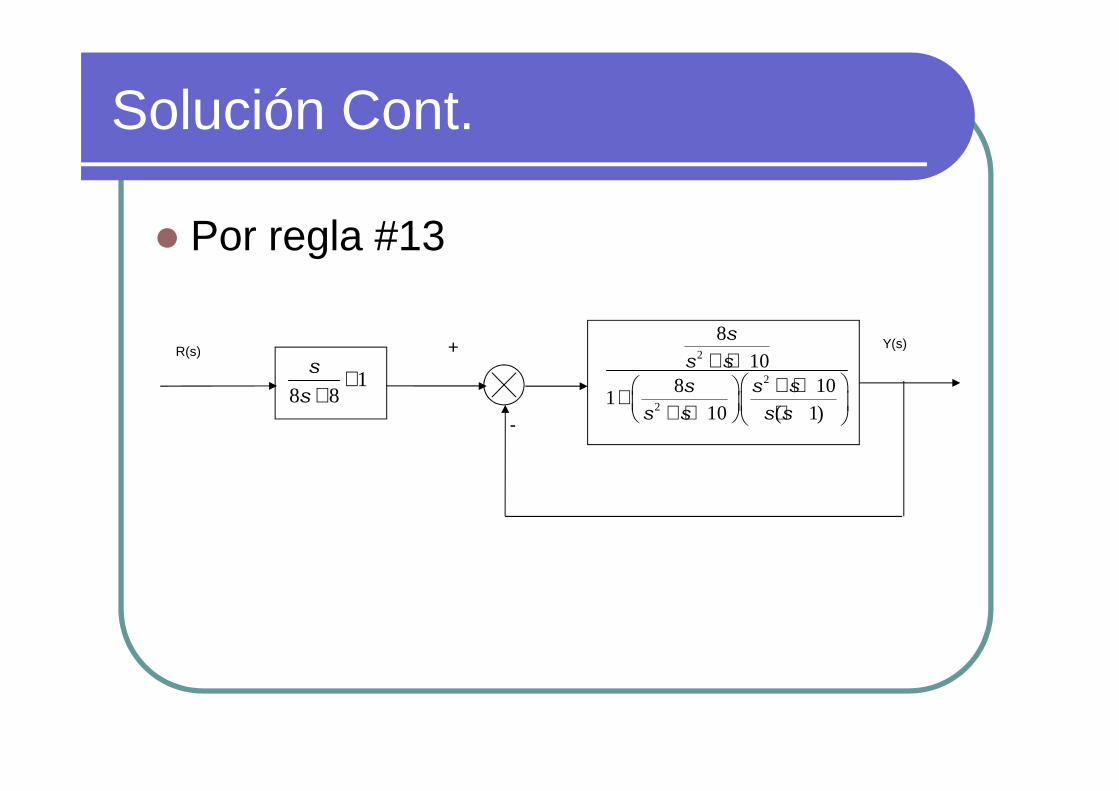
Solución Cont.
� Por regla #13
Y(s)R(s) + 2
2
810
8 101
s
s s
s s s
+ + + + +
18 8
s
s+
+-
2
8 101
10 ( 1)s s s
s s s s
+ + + + + + 8 8s +
Y(s)R(s)
-
+
( )( )2
(8 8)
10 9
s s
s s s
++ + +
9 8
8 8
s
s
++
-
Y(s)R(s) ( )( )
( )( )
2
2
(8 8)
10 9
(8 8)1
10 9
s s
s s s
s s
s s s
++ + +
+++ + +
9 8
8 8
s
s
++

Solución
� Simplificando
Y(s)R(s) ( )( )( ) ( )2
9 8
10 9 8 1
s s
s s s s s
++ + + + +( )( ) ( )10 9 8 1s s s s s+ + + + +

Gráficos de flujo de señal
Nodo .- Es un punto de entrada o salida que representa una variable o señal.
Nodo fuente .- Este representa las variables independientes del sistema y es un nodo en donde solo existen ramas de salida.solo existen ramas de salida.
Nodo sumidero .- Representa las variables dependientes del sistema y es un nodo en donde solamente hay ramas de entrada.
Rama.- Línea con dirección y sentido que conecta dos nodos.
Transmitancia .- Es la ganancia de una rama.
Camino o trayectoria .- Es un conexión continua de ramas de un nodo a otro, en una dirección acorde con el sentido de las flechas de las ramas.
Trayecto o camino directo .-Es una trayectoria que conecta a un nodo fuente con un nodo sumidero.
Ganancia del trayecto .- Es el producto de las transmitancias de todas las ramas del trayecto.
Lazo .- Es un camino o trayectoria cerrada.Ganancia de lazo .- Es el producto de las transmitancias
de todas las ramas del lazo.Lazo disjunto .- Es un lazo que no tiene ningún nodo en
común con otro lazo, es decir, no se tocan.

Semejanzas entre gráficos de flujo de señal y diagramas de bloques
Gráfico de flujo de señal Diagrama de bloques
Nodo de entrada Señal de entradaNodo de salida Señal de salida
rama bloqueTransmitancia Ganancia del bloque
Nodo señal
C(s)R(s) +
-
+
-1( )G s 2 ( )G s 3( )G s
1( )H s
+ -C(s)
R(s)1 1 G1(s) G2(s) G3(s) 1
-1
-H2(s)
1L
2L
3L
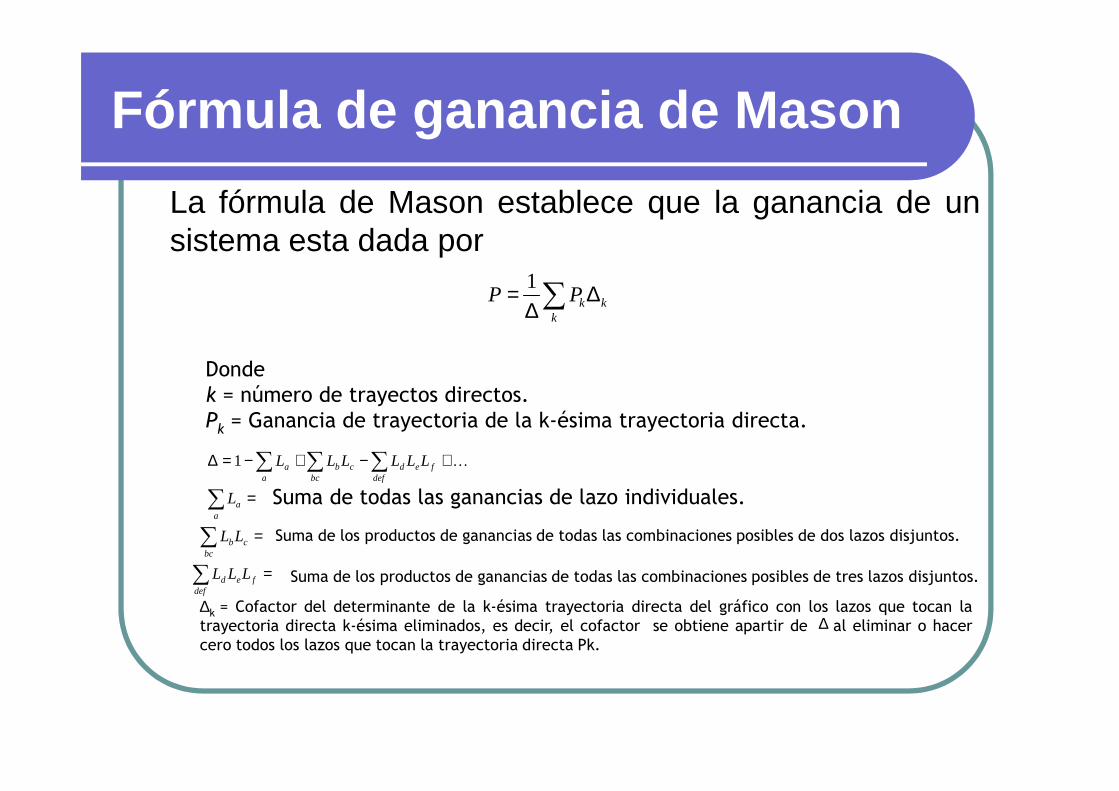
Fórmula de ganancia de Mason
La fórmula de Mason establece que la ganancia de unsistema esta dada por
Dondek = número de trayectos directos.
1k k
k
P P= ∆∆∑
…+−+−=∆ ∑∑∑def
fedbc
cba
a LLLLLL1
=∑a
aL
k = número de trayectos directos.Pk = Ganancia de trayectoria de la k-ésima trayectoria directa.
Suma de todas las ganancias de lazo individuales.
=∑bc
cbLL
=∑def
fed LLL
∆
Suma de los productos de ganancias de todas las combinaciones posibles de dos lazos disjuntos.
Suma de los productos de ganancias de todas las combinaciones posibles de tres lazos disjuntos.
∆k = Cofactor del determinante de la k-ésima trayectoria directa del gráfico con los lazos que tocan latrayectoria directa k-ésima eliminados, es decir, el cofactor se obtiene apartir de al eliminar o hacercero todos los lazos que tocan la trayectoria directa Pk.

Ejemplo
Identificando las trayectorias directas, tenemos
C(s)R(s)
1 1 G1(s) G2(s) G3(s) 1
-1
-H2(s)
1L
2L
3L
1 1 2 3( ) ( ) ( )P G s G s G s=
En este caso hay tres lazos individuales
Como puede observarse, todos los lazos tienen nodos en común, por lo tanto no hay lazos disjuntos.
1 1 2 1( ) ( ) ( )L G s G s H s=
2 2 3( ) ( )L G s G s= −
3 1 2 3 2( ) ( ) ( ) ( )L G s G s G s H s= −
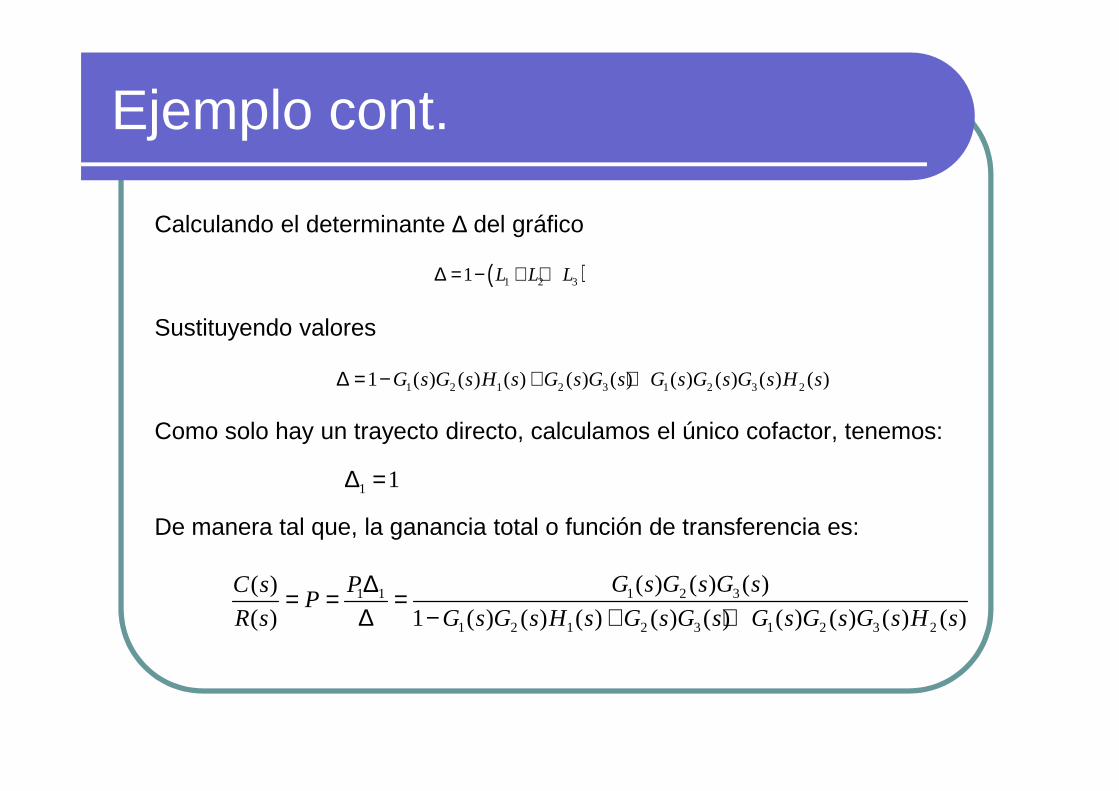
Ejemplo cont.
Calculando el determinante ∆ del gráfico
Sustituyendo valores
( )1 2 31 L L L∆ = − + +
1 2 1 2 3 1 2 3 21 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )G s G s H s G s G s G s G s G s H s∆ = − + +
Como solo hay un trayecto directo, calculamos el único cofactor, tenemos:
De manera tal que, la ganancia total o función de transferencia es:
1 1∆ =
1 2 31 1
1 2 1 2 3 1 2 3 2
( ) ( ) ( )( )
( ) 1 ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
G s G s G sPC sP
R s G s G s H s G s G s G s G s G s H s
∆= = =∆ − + +
MATRIZ DE TRANSFERENCIA
1 1
2 2
( ) ( )
( ) ( )( ) ( )
( ) ( )
= =
⋮ ⋮
m r
y t u t
y t u ty t U t
y t u t
Para un sistema MIMO, se tienen r entradas u1, u2,.., ur y m salidas y1, y2,…,ym definidos como
( ) ( ) m ry t u t
( ) ( ) ( )Y s G s U s=
La matriz de transferencia G(s) relaciona la salida Y(s) conla entrada U(s), o sea
DondeU(s) vector de entradas de orden rY(s) vector de salida de orden m G(s) matriz de transferencia de orden mxr

EJEMPLO DE SISTEMA MIMO
� SISTEMA DE SUSPENSION DE UN AUTOBUS
x1(t)M1
K1
Auto
Sistemade
f(t)
fv
M2
x2(t)
K1
K2
de suspensión
Elasticidad de la llanta
Masa de lasuspensión
U(t)