Mov. Rectilineo Uniforme
91
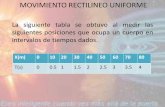
1. Cinemática 1.1 Características de los fenómenos mecánicos Movimiento. Es el cambio de posición de un cuerpo con respecto a un punto de referencia en el espacio y en tiempo. - Trayectoria. Es la ruta o camino a seguir por un determinado cuerpo en movimiento. - Distancia. Es la separación lineal que existe entre dos lugares en cuestión, por lo que se considera una cantidad escalar. - Desplazamiento. Es el cambio de posición de una partícula en determinada dirección, por lo tanto es una cantidad vectorial. - Velocidad media. Representa el cociente entre el desplazamiento total hecho por un objeto (móvil) y el tiempo en efectuarlo. 1.2 Movimiento rectilíneo uniforme Movimiento Rectilíneo Uniforme (M.R.U.) Un objeto se mueve con movimiento rectilíneo uniforme cuando recorre distancias iguales en tiempos iguales es decir su velocidad es constante. Y lo hace a largo de un recta. donde: d = distancia total ( m, km, ft ) t = tiempo total ( s, min, hr ) v = velocidad media ( m/s , km/hr , ft/s ) Ejemplos: a) Un automóvil recorrió 450 Km en 5 horas para ir de la Ciudad de México a la Playa de Acapulco. ¿Cuál fue la velocidad media del recorrido? Datos Fórmula Sustitución Resultado d = 450 km t = 5 h v= 90 km/h
-
Upload
andrea-villa -
Category
Documents
-
view
60 -
download
7
description
Rectilineo Uniforme
Transcript of Mov. Rectilineo Uniforme

1. Cinemática1.1 Características de los fenómenos mecánicos
Movimiento. Es el cambio de posición de un cuerpo con respecto a un punto de referencia en el espacio y en tiempo.
- Trayectoria. Es la ruta o camino a seguir por un determinado cuerpo en movimiento.
- Distancia. Es la separación lineal que existe entre dos lugares en cuestión, por lo que se considera una cantidad escalar.
- Desplazamiento. Es el cambio de posición de una partícula en determinada dirección, por lo tanto es una cantidad vectorial.
- Velocidad media. Representa el cociente entre el desplazamiento total hecho por un objeto (móvil) y el tiempo en efectuarlo.
1.2 Movimiento rectilíneo uniforme
Movimiento Rectilíneo Uniforme (M.R.U.)
Un objeto se mueve con movimiento rectilíneo uniforme cuando recorre distancias iguales en tiempos iguales es decir su velocidad es constante. Y lo hace a largo de un recta.
donde: d = distancia total ( m, km, ft )
t = tiempo total ( s, min, hr )
v = velocidad media ( m/s , km/hr , ft/s )
Ejemplos:
a) Un automóvil recorrió 450 Km en 5 horas para ir de la Ciudad de México a la Playa de Acapulco. ¿Cuál fue la velocidad media del recorrido?
Datos Fórmula Sustitución Resultado
d = 450 km
t = 5 h
v= 90 km/h
b) Un venado se mueve sobre una carretera recta con una velocidad de 72 Km / hr, durante 5 minutos ¿Qué distancia recorre en este tiempo?
Hay que hacer conversiones para que las unidades sean homogéneas
Tiempo:
Velocidad:

Datos Fórmula Sustitución Resultado
v = 20 m/s
t = 300 s
d = vt d = 20 * 300 d = 6000 m
c) Realizar una gráfica d-t del comportamiento de un automóvil que partiendo del reposo, se mueve con una velocidad constante de 3 m/s.
1.3 Movimiento uniformemente acelerado
El movimiento acelerado incluye a la caída libre y al tiro vertical cambiando ciertas variables.

M.U.A.
Caída libre y Tiro vertical
Distancia (d)
Altura (h)
Aceleración (a)
Aceleración de la gravedad (g)
g = 9.81m/ s2 ≈ (10 m/ s2)
La aceleración es la relación de cambio de la velocidad en el tiempo transcurrido y se representar con la siguiente ecuación:
a = aceleración (m/ s2)
Vf = velocidad final (m/s)
Vi = velocidad inicial (m/s)
t = tiempo (s)
Al analizar la ecuación anterior se obtienen las siguientes conclusiones:
· Si la velocidad final es mayor que la velocidad inicial entonces la aceleración es positiva y por lo tanto el móvil acelera.
· Si la velocidad final es menor que la velocidad inicial entonces la aceleración es negativa y por lo tanto el móvil desacelera (frena).
I. II. III. IV.
donde: vf = velocidad final (m/s) d = desplazamiento (m) vi = velocidad inicial (m/s)
a = aceleración (m/s2) t = tiempo (s)
Existen otras fórmulas aplicadas al M.U.A. De estas relaciones surgen más, pero solamente si son despejadas.
Análisis del M.U.A.
· Si el móvil parte del reposo, entonces su velocidad inicial (vi) es igual a cero.
· Si el móvil se detiene (frena), entonces su velocidad final (vf) es igual a cero.
Gráficas de Movimietos

Ejemplos:
a) Un vehículo se mueve a razón de 10 m/s, al transcurrir 20 s, su velocidad es de 40 m/s. ¿Cuál es su aceleración?
Datos Fórmula Sustitución Resultado
vi = 10 m/s
vf = 40 m/s
t = 20 s
a = 1.5 m/s2
b) Un motociclista parte del reposo y experimenta una aceleración de 2 m/ s2 ¿Qué distancia habrá recorrido después de 4 s?
Datos Fórmula Sustitución Resultado
vi = 0
a = 2 m/s2
t = 4 s
d = 16 m
c) Del gráfico siguiente realiza una descripción del movimiento y hallar la aceleración del móvil.
El móvil parte del reposo y acelera hasta alcanzar una velocidadde 15 m/s.
De los 10 s a los 25 s, se desplaza a velocidad constante de 15 m/s.
A partir del segundo 25 empieza a desacelerar y se detiene a los 40 s.
La aceleración
de 0s a 10s: m/s2

de 10s a 25s: m/s2
de 25s a 40s: m/s2,
el signo es negativo porque la gráfica no sube baja y
por lo tanto es una desaceleración.
2.2 Caída libre
Todo cuerpo que cae desde el reposo o libremente al vacío, su velocidad inicial valdrá cero y su aceleración será de g = 9.81 m/s2.
I. II. III. IV.
donde: v = velocidad (m/s) h = altura (m) t = tiempo (s)
Ejemplos:
a) Un niño deja caer una pelota desde una ventana de un edifico y tarda 3s en llegar al suelo, ¿Cuál es la altura del edificio?. Considerar g = 10 m/s2
Datos Fórmula Sustitución Resultado
t = 3 s
g = 10 m/s2
h = 45 m
b) Se deja caer un objeto desde un puente que esta a 80 m del suelo ¿Con qué velocidad el objeto se estrella contra el suelo?. Considerar g = 10 m/s2
Datos Fórmula Sustitución Resultado
h = 80 m
g = 10 m/s2
d = 40 m/s
2. Fuerzas, leyes de Newton y Ley de la Gravitación Universal
2.1 Factores que cambian la estructura o el estado de movimiento de objetos
Factores que cambian la estructura o el estado de movimiento de objetos: Son todas aquellas fuerzas y conceptos que a continuación se definen.Fuerza por contacto: Es aquella fuerza de rozamiento que se genera cuando un cuerpo móvil choca con un cuerpo estático o en reposo surgiendo un movimiento en este segundo cuerpo.

Fuerza a distancia: Es aquella fuerza que surge por medio de la repulsión o atracción que genera un cuerpo en movimiento hacia otro que se localiza en reposo, la cual genera movimiento en este segundo cuerpo. Por ejemplo las cargas eléctricas del mismo signo se repelen haciendo que el cuerpo en reposo tenga movimiento. Fuerzas activas: Son aquellas fuerzas de acción que se encuentran dentro de un cuerpo en movimiento o en reposo, las cuales actúan para llevar a cabo un desplazamiento.Fuerzas reactivas: Son aquellas fuerzas de reacción que actúan dentro de un cuerpo al recibir una fuerza externa contraria a su movimiento o estado de reposo.Peso de un cuerpo: Es igual a la fuerza gravitacional que ejerce dicho cuerpo sobre la superficie de la tierra, en otras palabras, es el producto de la masa del cuerpo por la aceleración gravitacional.
G= Nm=kgg=9.8 m/s2
G= mg
EJEMPLO DE PESO DE UN CUERPO:
Calcular la masa de un cuerpo que cae libremente y tiene un peso de 4500 D.
m= G/ g= 4500 D/ 980 cm/s2= 4.59 g
Fuerza normal: Es la fuerza perpendicular ejercida a la trayectoria por la superficie de apoyo.Fuerza de fricción: Es la resistencia que se opone al movimiento relativo entre dos cuerpos. Este tipo de fuerza depende de la fuerza normal y regularmente se conoce como fricción por deslizamiento y se debe por la interacción entre las moléculas de los dos cuerpos, en ocasiones se le denomina cohesión o adhesión dependiendo de si los cuerpos son del mismo o diferente material. La fuerza de fricción por deslizamiento seopone al movimiento del cuerpo, por lo tanto tiene una dirección opuesta a la velocidad. Regularmente la fuerza de fricción es constante., por lo que se tienen determinados coeficientes de fricción.El carácter vectorial de la fuerza: Toda fuerza esta representada por magnitudes vectoriales, las cuales se representan por medio de una flecha en el plano cartesiano y para obtener los componentes se requiere conocer lo siguiente:Dirección de la fuerza: Recta en la que se mueve, esta puede ser este u oeste y/o el ángulo que forma con una horizontal x.Sentido de la fuerza: Hacia donde se dirige arriba, abajo, izquierda y derecha; la representa la punta de la flecha.Magnitud del desplazamiento: Es la medida de escala escogida para la representación en el plano.Punto de partida de la fuerza: Lugar donde iniciará la representación de la magnitud de la fuerza.
2.2 El concepto de fuerza
Se denomina fuerza a cualquier acción o influencia capaz de modificar el estado de movimiento o de reposo de un cuerpo, es decir, de imprimirle una aceleración modificando su velocidad. Para medir

las fuerzas necesitamos compararlas con otra que se toma como unidad; por ello hemos de definir la Unidad de fuerza.2.3 El carácter vectorial de la fuerza
La unidad de fuerza del Sistema Internacional es el Newton. Cuyo símbolo es N. Para medir las fuerzas se utilizan unos instrumentos llamados dinamómetros basados en que la deformación producida por una fuerza es proporcional a dicha fuerza. La fuerza es una magnitud vectorial.
Ejemplos:
a) ¿Cuál es la magnitud de la fuerza resultante aplicada a un cuerpo, si ejercen en él dos fuerzas:
F1= (30 N, 90º ) y F2 = (40 N, 0º)
El ángulo que se forma entre los vectores es de 90º; por lo tanto se aplica Teorema de Pitágoras para encontrar la resultante.
Para encontrar el ángulo que se hace la resultante:
b) Un bloque de 100 N se desliza sobre una tabla. Calcular la fuerza que se debe aplicar al bloque para que se mueva con una velocidad constante si: a) La tabla se encuentra en posición horizontal. b) La tabla se encuentra con un ángulo de 45º respecto al suelo. Despreciando la fricción.
a) El ángulo es de 0º, por lo que cos 0º = 1.
F = Fx = (100 N)x(cos 0º) = 100 N
b) El ángulo es de 45º, por lo que:

sen 45º = cos 45º = = 0.7071
F = (P)*(sen 45) = 100 = 70.71 N
2.4 Superposición de fuerzas
El principio de superposición o teorema de superposición es un resultado matemático que permite descomponer un problema lineal en dos o más subproblemas más sencillos, de tal manera que el problema original se obtiene como "superposición" o "suma" de estos subproblemas más sencillos.
Técnicamente, el principio de superposición afirma que cuando las ecuaciones de comportamiento que rigen un problema físico son lineales, entonces el resultado de una medida o la solución de un problema práctico relacionado con una magnitud extensiva asociada al fenómeno, cuando están presentes los conjuntos de factores causantes A y B, puede obtenerse como la suma de los efectos de A más los efectos de B.

2.5 Primera Ley de Newton
1ra. Ley (Ley de la inercia) . Un objeto en reposo permanece en reposo y un objeto en movimiento, continuará en movimiento con una velocidad constante a menos que se aplique una fuerza externa neta para modificar dicho estado.
La masa (m), es la medida de la inercia de un cuerpo. Su unidad de medida (Kg)
2.6 Segunda Ley de Newton
2da. Ley. La aceleración de un objeto es directamente proporcional a la fuerza neta que actúa sobre él e inversamente proporcional a su masa. Es decir si la fuerza aumenta la aceleración aumenta; pero si la masa aumenta la aceleración disminuye.
. Cuando una fuerza neta sobre un cuerpo es cero, su aceleración es cero (a = 0).
donde: a = aceleración ( m/s2 ) F = Fuerza (N) m = masa (Kg)
Peso (W). Es la fuerza de atracción que ejerce la tierra, sobre cualquier cuerpo que esta sobre su superficie. El peso se mide con un dinamómetro y su unidad en el sistema internacional es el newton (N).
2.6.1 Concepto de peso
el peso de un cuerpo es una magnitud vectorial, el cual se define como la fuerza con la cual un cuerpo actúa sobre un
punto de apoyo, a causa de la atracción de
este cuerpo por la fuerza de la gravedad.2.6.2 Concepto de masa
es la magnitud que cuantifica la cantidad de materia de un cuerpo. La unidad de masa, en el Sistema Internacional de Unidades es el kilogramo (kg). Es una cantidad escalar y no debe confundirse con el peso, que es una fuerza.
2.7 Tercera Ley de Newton
3ra. Ley (ley de la acción y de la reacción). Establece que si dos cuerpos interactúan, la fuerza ejercida sobre el cuerpo 1 por el cuerpo 2 es igual y opuesta a la fuerza ejercida sobre el cuerpo 2 por el cuerpo 1.

Ejemplos:
a) ¿Cual es el valor de la fuerza que recibe un cuerpo de 30 Kg, la cual le produce una aceleración de 3 m/s2?
Datos Fórmula Sustitución Resultado
m = 30Kg
a = 3 m/s2
b) ¿Cuál es el peso de un cuerpo cuya masa es de 60 Kg?
Datos Fórmula Sustitución Resultado
m =60 Kg
g = 9.8 m/s2
2.8 Equilibrio rotacional y traslacional. Fuerza y torca
Momento de torsión se puede definir como la tendencia a producir un cambio en el movimiento de rotación y queda definida por la siguiente ecuación:
M = momento de torsión. (Nm)
F= fuerza. (N)
d= brazo de palanca. (m)
El brazo de la palanca (d) se define como la distancia, medida perpendicularmente a la línea de acción de la fuerza dada para causar un movimiento de rotación.
Si la fuerza F tiende a producir una rotación contaría al movimiento de las manecillas del reloj, el momento de rotación resultante será considerado positivo. Los momentos de torsión en el sentido de las manecillas del reloj serán negativas A continuación se muestran algunos ejemplos de brazos de palancas.
Ejemplo:
a) Comprobar que la siguiente balanza se encuentra en equilibrio:

Como los dos momentos torsionales son iguales, por lo tanto el sistema se encuentra en equilibrio.
Cuestionario II
1. Una cantidad escalar queda definida por:
a) Su unidad b) Su dirección y magnitud
c) Un número y una unidad
d) Su dirección y sentido
2. Dados dos fuerzas F1 y F2, especificar el ángulo que deberán formar los vectores para que la magnitud de su suma sea mayor.
a) 180º b) 45º c) 0º d) 90º
3. ¿Cuál de las siguientes afirmaciones sobre la masa es correcta?
a) La masa es una cantidad vectorial
b) La masa es una fuerza
c) Es la medida cuantitativa de la inercia de un objeto
d) Ninguna es correcta
4. Un cuerpo de masa m recibe una fuerza F y adquiere una aceleración a. Si la masa del cuerpo se reduce a la mitad y recibe la misma fuerza, entonces la aceleración:
a) Se reduce a la mitad b) Permanece constante c) Aumenta cuatro veces
d) Se duplica
5. Si dos cuerpos de igual masa reciben fuerzas resultantes diferentes, de forma tal que la aceleración del primero es 3m/s2 y la del segundo es 1.5 m/s2, entonces podemos concluir que la fuerza resultante sobre el primero es…
a) El doble de la del segundo
b) La mitad que la del segundo
c) Igual en ambos caso
d) No se puede saber, pues no se conoce el valor de la masa
6. La fuerza….
a) Es la capacidad de realizar trabajo
b) Es el resultado de la aplicación de energía
c) Es una magnitud escalar
d) Es una magnitud vectorial
7. ¿Cuál de los siguientes enunciados es correcto?

a) La fuerza de acción aparece primero y después la reacción
b) La fuerza de acción y reacción aparecen en el mismo cuerpo
c) La fuerza de acción y reacción son de igual magnitud, igual dirección y sentido
d) Ninguna es correcta
8. Se tienen dos masa m1 y m2 separadas una distancia d. Si esta distancia de separación se reduce a la mitad, la fuerza de gravitación se…
a) Cuadriplica b) Duplica c) Reduce a la mitad d) Se mantiene constante
9. El peso de un cuerpo en la Tierra es de 60 N y su peso en una estrella de radio igual al de la Tierra es de 180 N, por lo que podemos concluir que la masa de la estrella es ___________ la masa de la tierra
a) Igual a b) El doble de c) El triple de d) El cuádruplo de
2.9 Ley de la Fuerza en un resorte (Ley de Hooke)
Ley de Hook. Establece que la deformación s de un cuerpo, respecto a su longitud sin carga, es directamente proporcional a la fuerza deformadora F. La constante k, o relación entre la fuerza y la deformación, se denomina modulo de elasticidad y se expresa en newtons por metro, en dinas por centímetro. Su valor es numéricamente igual al de la fuerza que se requiere para producir una deformación unidad.
F = k*s
2.10 Ley de la Gravitación Universal. Movimiento de planetas
Ley de la gravitación universal. La fuerza de atracción entre dos cuerpos separados a una distancia "d", es proporcional al producto de sus masas (m1,m2) e inversamente proporcional al cuadrado de la distancia de separación.
G = 6.67x10-11 N*m2/Kg2. Constante de la gravitación universal.
3. Trabajo y leyes de la conservación
3.1 Concepto de trabajo mecánico
Es el producto de la componente de la fuerza en la dirección del movimiento por la distancia que recorre el cuerpo. Es una magnitud escalar; y se representa con la letra T.

T = Trabajo ( J )
F = Fuerza ( N )
d = Desplazamiento ( m )
La unidad básica de trabajo en el Sistema Internacional es newton × metro y se denomina joule, y es la misma unidad que mide la energía.
Ejemplos:
a) ¿Cual es el trabajo efectuado sobre un cuerpo, si al aplicarle una fuerza horizontal de 100 N se desplaza
5 m?
Datos Fórmula Sustitución Resultado
F = 100 N

d = 5 m
b) ¿Qué trabajo se realiza al levantar un cuerpo de 900 N desde el suelo hasta 3 m de altura?
Datos Fórmula Sustitución Resultado
F = W =900 N
d = 3 m
3.2 Concepto de potencia
Es la rapidez con la que realiza un trabajo.
1 kw = 1000 watts y 1 HP = 746 wattS
Ejemplos:
a) Al realizar un trabajo de 1500 J en un tiempo de 0.5 s, ¿Cuál es la potencia desarrollada?
Datos Fórmula Sustitución Resultado
T = 1500 J
t = 0.5 s
b) ¿En cuanto tiempo se desarrolla un trabajo de 2400 J, con un motor de 800 watts de potencia?
Datos Fórmula Sustitución Resultado
T =2400 J
P = 800 watts
3.3 Energía cinética
La energía es la capacidad de efectuar un trabajo. Sus unidades son los joules (J) y las calorías (cal).
Energía cinética. Es la energía que posee un cuerpo en movimiento ( Joules )
m = masa del cuerpo (Kg)
v = velocidad ( m / s )
3.4 Energía potencial

Energía potencial. Es la energía que tiene un cuerpo de acuerdo a su posición. ( Joules )
m = masa del cuerpo (Kg)
g = gravedad ( 9.8 m/s2 )
h = altura (m)
3.5 Conservación de la energía mecánica
Energía mecánica. A la suma de las energías cinética y potencial:
Em= Ec + Ep = + mgh = constante
Ley de la Conservación de la Energía. La energía que existe en el Universo es una cantidad constante que no se crea ni se destruye, unicamente se transforma.
Ejemplos:
a) El profesor de física puede alcanzar una velocidad de 10m/s. Si su masa es de 60 kg. ¿Cuál es su energía cinética?
Datos Fórmula Sustitución Cálculos Resultado
m = 60kg
v = 10m/s
Ec = 3000 J
b) ¿A qué altura se encuentra una paloma en reposo que tiene una masa 0.5 kg y cuya energía potencial es de 500 J?
Datos fórmula Sustitución Cálculos Resultado
m = 0.5 kg
Ep = 500 J
g = 10 m/s
h = 100m
3.6 Conservación del ímpetu (momento)
La cantidad de movimiento, momento lineal o ímpetu (momentum), es una magnitud vectorial igual al producto de la masa del cuerpo multiplicada por su velocidad en un instante determinado.
P = mv
Conservación del ímpetu. El ímpetu total antes del impacto es igual al ímpetu total después del impacto:

m1u1+m2u2 = m1v1 + m2v2.
3.8 Procesos disipativos (fricción y rozamiento)
se define como fuerza de rozamiento o fuerza de fricción entre dos superficies en contacto a la fuerza que se opone al movimiento de una superficie sobre la otra (fuerza de fricción dinámica) o a la fuerza que se opone al inicio del movimiento (fuerza de fricción estática). Se genera debido a las imperfecciones, especialmente microscópicas, entre las superficies en contacto. Estas imperfecciones hacen que la fuerza entre ambas superficies no sea perfectamente perpendicular a éstas, sino que forma un ángulo φ con la normal (el ángulo de rozamiento). Por tanto, esta fuerza resultante se compone de la fuerza normal (perpendicular a las superficies en contacto) y de la fuerza de rozamiento, paralela a las superficies en contacto. Para el caso cinético o dinámico hay evidencia que sugiere que la fricción cinética se genera debido a enlaces o ligaduras entre los átomos de los diferentes objetos involucrados.[c
4. Termodinámica4.1 Calor y temperatura
4.1.1 Diferencia entre calor y temperatura
El calor es la una forma de energía que pasa de un cuerpo a otro y sus unidades son las calorías y los joules. La temperatura es la medida del promedio de la energía cinética de cada molécula; sus unidades son grados Celsius, Fahrenheit y Kelvin.El calor es la una forma de energía que pasa de un cuerpo a otro y sus unidades son las calorías y los joules. La temperatura es la medida del promedio de la energía cinética de cada molécula; sus unidades son grados Celsius, Fahrenheit y Kelvin.4.1.2 Equilibrio térmico
Consideremos dos cuerpos en contacto térmico. Si entre dichos cuerpos no existe flujo de calor entonces se dice que ambos cuerpos se encuentran en equilibrio térmico.
El parámetro termodinámico que caracteriza el equilibrio térmico es la temperatura. Cuando dos cuerpos se encuentran en equilibrio térmico, entonces estos cuerpos tienen la misma temperatura.
Para poder dar una definición más precisa del concepto de equilibrio térmico desde un punto de vista termodinámico es necesario definir algunos conceptos.
Dos sistemas que están en contacto mecánico directo o separados mediante una superficie que permite la transferencia de calor lo que se conoce como superficie diatérmica, se dice que están en contacto térmico.
Consideremos entonces dos sistemas en contacto térmico, dispuestos de tal forma que no puedan mezclarse o reaccionar químicamente. Consideremos además que estos sistemas están colocados en el interior de un recinto donde no es posible que intercambien calor con el exterior ni existan acciones desde el exterior capaces de ejercer trabajo sobre ellos. La experiencia indica que al cabo

de un tiempo estos sistemas alcanzan un estado de equilibrio termodinámico que se denominará estado de equilibrio térmico recíproco o simplemente de equilibrio térmico.
El concepto de equilibrio térmico puede extenderse para hablar de un sistema o cuerpo en equilibrio térmico. Cuando dos porciones cualesquiera de un sistema se encuentran en equilibrio térmico se dice que el sistema mismo está en equilibrio térmico o que es térmicamente homogéneo. Experimentalmente se encuentra que, en un sistema en equilibrio térmico, la temperatura en cualquier punto del cuerpo es la misma.
4.1.3 Escalas termométricas absolutas
Celsius: Es la medida de grados de temperatura que toma como base el punto de fusión (0°C) y el punto de ebullición (100°C) del agua a 1 atmósfera.
Fahrenheit: Es la medida en grados Fahrenheit que propone (32°F) para el punto de fusión y (212°F) al punto de ebullición del agua a 1 atmósfera.
Kelvin: Toma como base la temperatura más baja que puede obtenerse (cero absoluto) y corresponde a -273°C = 0°K.
Conversión de Unidades

Ejemplos:
a) ¿Cuál es la equivalencia al convertir 250 °C a °K?
Datos Fórmula Sustitución Resultado
T = 250°C
b) ¿Cuál es la equivalencia al convertir 250 °C a °F?
Datos Fórmula Sustitución Resultado
T =250 °C
4.1.4 Conductividad calorífica y capacidad térmica específica
La conductividad térmica es una propiedad física de los materiales que mide la capacidad de conducción de calor. En otras palabras la conductividad térmica es también la capacidad de una sustancia de transferir la energía cinética de sus moléculas a otras moléculas adyacentes o a substancias con las que está en contacto. En el Sistema Internacional de Unidades la conductividad térmica se mide en W/(K·m). También se lo expresa en J/(s·°C·m)
La inversa de la conductividad térmica es la resistencia térmica, que es la capacidad de los materiales para oponerse al paso del calor.
Se denomina capacidad térmica o calorífica al cociente entre el calor que se suministra a un sistema y la variación de temperatura provocada:

Donde C es la capacidad calorífica o térmica, dQ el calor que es necesario suministrar para incrementar la temperatura en dT.
La capacidad térmica expresa el calor que es capaz de almacenar un sistema al incrementarse su temperatura, de ahí que se denomine «capacidad» a esta magnitud, pero también de la oposición a dicho cambio de temperatura en la medida en que cuanto mayor sea la capacidad térmica mayor habrá de ser el calor suministrado para lograr la misma variación de temperatura pudiendo hablarse así de cierta «inercia térmica»; por ejemplo, las grandes masas de agua son capaces de almacenar grandes cantidades de calor sin aumento perceptible de temperatura o por contra de liberar calor sin apenas enfriarse de modo que pueden actuar como reguladores térmicos templando los climas costeros. Este calor es proporcional a la masa por lo que se suele trabajar con las capacidades térmicas específicas referidas a la unidad de masa o volumen —kilogramo, mol y metro cúbico o litro son las unidades usualmente empleadas— lo que permite caracterizar el comportamiento de la sustancia independientemente del efecto de la masa antes comentado.
El calor específico, capacidad calorífica específica o capacidad térmica específica, c, de una sustancia es la cantidad de calor intercambiada por unidad de masa de dicha sustancia al incrementarse un grado su temperatura:
En el Sistema Internacional de Unidades el calor específico se expresa en julios por kilogramo kelvin, cuya notación es:
4.1.5 Leyes de la Termodinámica
Ley cero. Si los cuerpos A y B están en equilibrio térmico con un cuerpo C, entonces A y B están en equilibrio térmico entre sí y el intercambio neto de energía entre ellos es cero.
1a Ley. En la transformación de cualquier tipo de energía, en energía calorífica, o viceversa, la energía producida equivale, exactamente, a la energía transformada, es decir que la energía no se crea ni se destruye, sólo se transforma. Una forma alterna "En cualquier proceso termodinámico, el calor (Q) neto absorbido por un sistema es igual a la suma del equivalente térmico del trabajo (ΔW) realizado por él y el cambio en su energía interna
(ΔU). ΔQ = ΔU + ΔW
2a Ley. Afirma la imposibilidad de movimiento continuo, esto es que, todos los procesos de la naturaleza tienden a producirse sólo con un aumento de entropía y la dirección del cambio siempre es en la del incremento de la entropía, o que no existe máquina que, sin recibir energía exterior, pueda transferir calor a otro, (de mayor temperatura) para elevar su temperatura.
3a Ley. La entropía de todo sólido cristalino puro se puede considerar nula a la temperatura del cero absoluto.

6.5 Propiedades generales de la materia
Hay dos tipos de propiedades que presenta toda la materia: Propiedades Extensivas (generales) y Propiedades Intensivas (específicas).
- Las Propiedades Extensivas dependen de la cantidad de materia, por ejemplo: Peso, Volumen, Inercia, Impenetrabilidad, Divisibilidad, Porosidad, Longitud, Energía Potencial, Calor, etc.
- Las Propiedades Intensivas no dependen de la cantidad de materia y pueden ser una relación de propiedades, por ejemplo: Temperatura, Punto de Fusión, Punto de Ebullición, Índice de Refracción, Calor Específico, Densidad, Concentración, etc.
Teoría cinética de los gases. Es una teoría física que explica el comportamiento y propiedades macroscópicas de los gases a partir de una descripción estadística de los procesos moleculares microscópicos y sus postulados son:
Los gases están constituidos por partículas que se mueven en línea recta y al azar. Este movimiento se modifica si las partículas chocan entre sí o con las paredes del
recipiente. El volumen de las partículas se considera despreciable comparado con el volumen del gas. Entre las partículas no existen fuerzas atractivas ni repulsivas. La energía cinética de las partículas es proporcional a la temperatura absoluta del gas.
4.2 Teoría Cinética de los Gases
Es una teoría física que explica el comportamiento y propiedades macroscópicas de los gases a partir de una descripción estadística de los procesos moleculares microscópicos y sus postulados son:
Los gases están constituidos por partículas que se mueven en línea recta y al azar. Este movimiento se modifica si las partículas chocan entre sí o con las paredes del
recipiente. El volumen de las partículas se considera despreciable comparado con el volumen del gas. Entre las partículas no existen fuerzas atractivas ni repulsivas. La energía cinética de las partículas es proporcional a la temperatura absoluta del gas
4.2.1 Estructura de la materia (enfoque clásico)
Estructura de la materia: La materia esta formada por moléculas, las que a su vez contienen a los átomos que están formados por electrones, protones y neutrones.4.2.2 Temperatura según la Teoría Cinética de los Gases
La ecuación superior nos dice que la presión de un gas depende directamente de la energía cinética molecular. La ley de los gases ideales nos permite asegurar que la presión es proporcional a la temperatura absoluta. Estos dos enunciados permiten realizar una de las afirmaciones más importantes de la teoría cinética: La energía molecular promedio es proporcional a la temperatura. La constante de proporcionales es 3/2 la constante de Boltzmann, que a su vez es el cociente entre la constante de los gases R entre el número de Avogadro. Este resultado permite deducir el principio o teorema de equipartición de la energía.
La energía cinética por Kelvin es:

Por mol 12.47 J Por molécula 20.7 yJ = 129 μeV
En condiciones estándar de presión y temperatura (273.15 K) se obtiene que la energía cinética total del gas es:
Por mol 3406 J Por molécula 5.65 zJ = 35.2 meV
Ejemplos:
Dihidrógeno (peso molecular = 2): 1703 kJ/kg Dinitrógeno (peso molecular = 28): 122 kJ/kg Dioxígeno (peso molecular = 32): 106 kJ/kg
4.2.3 Ecuación de estado de los gases ideales
La ley de los gases ideales es la ecuación de estado del gas ideal, un gas hipotético formado por partículas puntuales, sin atracción ni repulsión entre ellas y cuyos choques son perfectamente elásticos (conservación de momento y energía cinética). Los gases reales que más se aproximan al comportamiento del gas ideal son los gases monoatómicos en condiciones de baja presión y alta temperatura.
Empíricamente, se observan una serie de relaciones entre la temperatura, la presión y el volumen que dan lugar a la ley de los gases ideales, deducida por primera vez por Émile Clapeyron en 1834.
La ecuación que describe normalmente la relación entre la presión, el volumen, la temperatura y la cantidad (en moles) de un gas ideal es:
Donde:
= Presión = Volumen = Moles de Gas. = Constante universal de los gases ideales . = Temperatura absoluta
5. OndasUna onda es una perturbación que se propaga desde el punto en que se produjo hacia el medio que rodea ese punto. Las ondas materiales (todas menos las electromagnéticas) requieren un medio elástico para propagarse. El medio elástico se deforma y se recupera vibrando al paso de la onda.
Ondas longitudinales: el movimiento de las partículas que transportan la onda es paralelo a la dirección de propagación de la onda. Por ejemplo, un resorte que se comprime y el sonido.
Ondas transversales: las partículas se mueven perpendicularmente a la dirección de propagación de la onda.

5.1 Caracterización de ondas mecánicas
Ondas mecánicas: las ondas mecánicas necesitan un medio elástico (sólido, líquido o gaseoso) para propagarse. Las partículas del medio oscilan alrededor de un punto fijo, por lo que no existe transporte neto de materia a través del medio. Como en el caso de una alfombra o un látigo cuyo extremo se sacude, la alfombra no se desplaza, sin embargo una onda se propaga a través de ella. Dentro de las ondas mecánicas tenemos las ondas elásticas, las ondas sonoras y las ondas de gravedad.5.2 Reflexión y refracción de ondas
Reflexión. Ocurre cuando una onda, al encontrarse con un nuevo medio que no puede atravesar, cambia de dirección.
- Refracción. Ocurre cuando una onda cambia de dirección al entrar en un nuevo medio en el que viaja a distinta velocidad.
5.3 Difracción e interferencia de ondas
Difracción. Ocurre cuando una onda al topar con el borde de un obstáculo deja de ir en línea recta para rodearlo.Interferencia. Ocurre cuando dos ondas se combinan al encontrase en el mismo punto del espacio.
6. Electromagnetismo6.1 Efectos cualitativos entre cuerpos cargados eléctricamente
Es la propiedad que tiene la materia de constituirse por átomos que a su vez se componen de electrones (carga negativa), protones (carga positiva) y neutones ( sin carga eléctrica).
En el Sistema Internacional de Unidades la unidad de carga eléctrica se denomina coulomb (símbolo C).
Se dice que: "Las cargas del mismo signo, se repelen y cargas con signos diferentes se atraen"
Un cuerpo puede electrizarse por tres formas: frotamiento, contacto e inducción.
- Electrización por frotamiento. Si frotamos una barra de ebonita con un paño de lana podemos verificar que se material y el paño han quedado electrizados. Las cargas desarrolladas son de signos distintos.
- Electrización por contacto. Es cuando se toca un cuerpo con otro cuerpo electrizado esto pasa en la mayoría de los metales.

- Electrización por inducción. Cuando un cuerpo cargado se aproxima a otro cuerpo, en el extremo del cuerpo próximo al que está electrizado aparece una carga inducida de signo opuesto al de la carga inductora y en extremo opuesto aparece una carga del mismo signo.
En el Sistema Internacional de Unidades la unidad de carga eléctrica se denomina coulomb (símbolo C). Se define como la cantidad de carga que pasa por una sección en 1 segundo cuando la corriente eléctrica es de 1 amper, y se corresponde con la carga de 6,25 × 1018 electrones.
Conductores. Materiales que facilitan el flujo de electrones. Todos los metales son excelentes conductores.
Aislantes. Materiales que se oponen al flujo de los electrones.
6.2 Ley de Coulomb. Campo eléctrico
La fuerza ejercida por una carga sobre otra es directamente proporcional al producto de ambas cargas (q1 y q2) e inversamente proporcional al cuadrado de la distancia r entre las cargas.
. donde K es la constante de proporcionalidad; su valor es:
donde: q1 y q2 = Cargas eléctricas ( C ) r = distancia entre cargas ( m )
Ejemplos
a) Calcular la fuerza eléctrica entre dos cargas cuyos valores son: q1 = 2 milicoulombs, q2 = 4 milicoulombs, al estar separadas en el vacío por una distancia de 30 cm.
Datos fórmula Sustitución Resultado
q1 = 2x10-3 C
q2 = 4 x10-3 C
r = 0.3 m
F = 8x105 N
b) Determinar la distancia a la que se encuentran dos cargas eléctricas de 7x10-8C, al rechazarse con una fuerza de 4.41x10-3 N.

Datos fórmula Sustitución Resultado
q1 = 7x10-8 C
q2 = 7 x10-8 C
F = 4.41x x10-3 N
r = 0.1m = 10 cm
6.3 Ley de Ohm y potencia eléctrica
La cantidad de corriente que fluye por un circuito formado por resistencias puras es directamente proporcional a la fuerza electromotriz aplicada al circuito, e inversamente proporcional a la resistencia total del circuito. Esta ley suele expresarse mediante la fórmula
donde:
I la intensidad de corriente en ampers,
V la fuerza electromotriz en volts y
R la resistencia en ohms.
Ejemplo
a) Un calentador eléctrico absorbe 5A cuando se conecta a una tensión de 110V. Calcular su resistencia.
Datos Fórmula Sustitución Resultado
R = ?
I = 5A
V = 110V
R = 22 Ω
b). Hallar la intensidad de corriente que circula por un tostador eléctrico de 8 Ω de resistencia que funciona a 120 V.
Datos Fórmula Sustitución Resultado
I = ?
R = 8 Ω
V = 120V
I = 15 A

6.4 Circuitos
Circuito eléctrico, es el trayecto o ruta de una corriente eléctrica. Se denomina resistencia eléctrica, simbolizada habitualmente como R, a la dificultad u oposición que presenta un cuerpo al paso de una corriente eléctrica para circular a través de él. En el Sistema Internacional de Unidades, su valor se expresa en ohmios, que se designa con la letra griega omega mayúscula, Ω. Para su medida existen diversos métodos, entre los que se encuentra el uso de un ohmímetro.
Esta definición es válida para la corriente continua y para la corriente alterna cuando se trate de elementos resistivos puros, esto es, sin componente inductiva ni capacitiva. De existir estos componentes reactivos, la oposición presentada a la circulación de corriente recibe el nombre de impedancia.
Según sea la magnitud de esta oposición, las sustancias se clasifican en conductoras, aislantes y semiconductoras. Existen además ciertos materiales en los que, en determinadas condiciones de temperatura, aparece un fenómeno denominado superconductividad, en el que el valor de la resistencia es prácticamente nulo.
6.4.1 Circuitos de resistencias
Circuito en serie.
Es aquél en que los dispositivos o elementos del circuito están dispuestos de tal manera que la totalidad de la corriente pasa a través de cada elemento sin división ni derivación en circuitos paralelos.
Cuando en un circuito hay dos o más resistencias en serie:
Re = R1 + R2 + R3 VT = V1 + V2 + V3 IT = I1 = I2 = I3
Circuito en paralelo. Si las resistencias están conectadas paralelamente.
VT = V1 = V2 = V3 IT = I1 + I2 + I3
6.4.2 Circuitos de condensadores

6.5 Campo magnético
Una barra imantada o un cable que transporta corriente pueden influir en otros materiales magnéticos sin tocarlos físicamente porque los objetos magnéticos producen un "campo magnético". Los campos magnéticos suelen representarse mediante "líneas de campo magnético" o "líneas de fuerza". En cualquier punto, la dirección del campo magnético es igual a la dirección de las líneas de fuerza, y la intensidad del campo es inversamente proporcional al espacio entre las líneas.6.6 Inducción electromagnética
es el fenómeno que origina la producción de una diferencia de potencial eléctrico (voltaje) en un medio o cuerpo expuesto a un campo magnético variable.6.7 Relación entre campo magnético y eléctrico
El campo eléctrico se crea o se genera por las cargas eléctricas. Siempre que exista una carga eléctrica, tanto positiva como negativa, se creará un campo eléctrico, tanto si la carga está en reposo como en movimiento. Otra forma de creación del campo eléctrico es la variación en el tiempo del campo magnético (una de las ecuaciones de Maxwell). Por lo tanto tenemos que siempre que halla cargas eléctricas o variación del campo magnético con el tiempo, tendremos campo eléctrico. El campo magnético se crea con el movimiento de las cargas eléctricas o con la variación con el tiempo del campo eléctrico (para ser más preciso, es la variación del vector desplazamiento, pero si estamos en el vacio solo se diferencian por una constante). Una carga en movimiento genera un campo magnético (lo mismo una corriente ya que no es más que cargas en movimiento).
6.8 Inducción de campos
es el fenómeno que origina la producción de una diferencia de potencial eléctrico (voltaje) en un medio o cuerpo expuesto a un campo magnético variable6.9 La luz como onda electromagnética
La luz es una onda electromagnética que se propaga en línea recta, líneas a las que llamamos rayos. La óptica geométrica estudia el comportamiento de la luz aplicando el concepto de rayo. La formación de sombras y penumbras detrás de un cuerpo opaco nos indica que la luz se propaga en línea recta, sirviendo como ejemplo los eclipses de Sol y Luna.6.10 Espectro electromagnético
El espectro electromagnético es el conjunto de todas las radiaciones de distinta frecuencia en que puede descomponerse la radiación electromagnética. Todas tienen el mismo origen, solo se diferencian por la frecuencia y longitud de onda.
Ondas de radio (104 hz - 1010 hz). Se usan en radio difusión y telecomunicaciones.
Microondas (1010 hz - 1012 hz). Producidas por la vibración de moléculas, se usan en hornos y radares.
Radiación infrarroja. (3x1012 hz - 3x1014 hz). Producidas por vibraciones de átomos, se usan en industria y medicina.
Luz visible (4000 - 7500 ; 4x1014 hz - 7x1014 hz). Son las que nuestra retina percibe, los colores dependen de la longitud de onda.
Rojo 6200 - 7500
Naranja 5900 - 6200
Amarillo 5700 - 5900
Verde 4900 - 5700

Azul 4300 - 4900
Violeta 4000 - 4300
Radiación ultravioleta (7x1014 hz - 1017 hz). Producida por saltos electrónicos entre átomos, se emplean en medicina. El Sol los emite.
Rayos X (1017 hz - 1019 hz). Su longitud de onda es del tamaño de los átomos. Se usan en industria y medicina, pero su exposición excesiva puede ser nociva.
Rayos gamma. (+1019 hz). Su longitud de onda es del tamaño de los núcleos atómicos. Son producidas en las reacciones nucleares. Su gran poder de penetración les hacen ser muy peligrosos.
6.11 Leyes de Ampere–Maxwell
En lo general, la ley de Ampère se emplea para calcular los campos magnéticos algún circuito eléctrico determinado, atendiendo a ello mediante constantes, descritas como:
Σ BIIΔ l = μ0 ΣI
de donde:
ΣI es la corriente neta, Δl es la distancia recorrida, BII el campo magnético generado y Σ BII Δl es la suma de ambos, además de que μ0 es igual a 4 π x 10-7 T (teslas) x metro/ A (amperes) (T x m/A), la constante de permeabilidad en el vacío, de aquel campo será B= μ0 I/ 2πr
6.12 Leyes de Faraday y Henry
dependientemente de Faraday, Joseph Henry, en los Estados Unidos, había observado que un campo magnético variable produce en un circuito próximo una corriente eléctrica. Los resultados concordantes de las experiencias de ambos físicos pueden resumirse en un enunciado que se conoce como ley de Faraday-Henry:
La fuerza electromotriz inducida en un circuito es proporcional a la rapidez con la que varía el flujo magnético que lo atraviesa. O en forma matemática:
ε = - Δ/Δt (12.2)
siendo ε la fuerza electromotriz inducida y Δ la variación de flujo magnético que se produce en el intervalo de tiempo Δ t. De acuerdo con esta ecuación, la magnitud de f.e.m. inducida coincide con lo que varía el flujo magnético por unidad de tiempo. La presencia de la fuerza electromotriz ε en la ley de Faraday-Henry en lugar de la intensidad de corriente (ambas son proporcionales entre sí), resalta una característica de la inducción, a saber, su capacidad para sustituir a un generador, es decir, para producir los mismos efectos que éste en un circuito eléctrico. Por su parte, el signo negativo recoge el hecho, observado experimentalmente por Faraday y Henry, de que aumentos (Δ > 0) y disminuciones (Δ< 0) de flujo magnético producen corrientes inducidas de sentidos opuestos.

Si no hay variación con el tiempo del flujo magnético que atraviesa un circuito, el fenómeno de la inducción electromagnética no se presenta. Tal circunstancia explica los fracasos de aquellos físicos contemporáneos de Faraday que pretendieron conseguir corrientes inducidas en situaciones estáticas, o de reposo, del circuito respecto del imán o viceversa. Cuando la ley de Faraday-Henry se aplica a una bobina formada por N espiras iguales toma la forma
ε = - N.Δ/Δt (12.3)
siendo Δ/Δt la variación del flujo magnético por unidad de tiempo para una sola espira en la bobina.
El sentido de las corrientes inducidas
Aunque la ley de Faraday-Henry, a través de su signo negativo, establece una diferencia entre las corrientes inducidas por un aumento del flujo magnético y las que resultan de una disminución de dicha magnitud, no explica este fenómeno. Lenz (1904-1965), un físico alemán que investigó el electromagnetismo en Rusia al mismo tiempo que Faraday y Henry, propuso la siguiente explicación del sentido de circulación de las corrientes inducidas que se conoce como ley de Lenz:
Las corrientes que se inducen en un circuito se producen en un sentido tal que con sus efectos magnéticos tienden a oponerse a la causa que las originó.
Así, cuando el polo norte de un imán se aproxima a una espira, la corriente inducida circulará en un sentido tal que la cara enfrentada al polo norte del imán sea también Norte, con lo que ejercerá una acción magnética repulsiva sobre el imán, la cual es preciso vencer para que se siga manteniendo el fenómeno de la inducción. Inversamente, si el polo norte del imán se aleja de la espira, la corriente inducida ha de ser tal que genere un polo Sur que se oponga a la separación de ambos. Sólo manteniendo el movimiento relativo entre espira e imán persistirán las corrientes inducidas, de modo que si se detiene el proceso de acercamiento o de separación cesarían aquéllas y, por tanto, la fuerza magnética entre el imán y la espira desaparecería.
La ley de Lenz, que explica el sentido de las corrientes inducidas, puede ser a su vez explicada por un principio más general, el principio de la conservación de la energía. La producción de una corriente eléctrica requiere un consumo de energía y la acción de una fuerza desplazando su punto de aplicación supone la realización de un trabajo. En los fenómenos de inducción electromagnética es el trabajo realizado en contra de las fuerzas magnéticas que aparecen entre espira e imán el que suministra la energía necesaria para mantener la corriente inducida. Si no hay desplazamiento, el trabajo es nulo, no se transfiere energía al sistema y las corrientes inducidas no pueden aparecer. Análogamente, si éstas no se opusieran a la acción magnética del imán, no habría trabajo exterior, ni por tanto cesión de energía al sistema.
Ejemplo de la ley de Faraday-Henry y del concepto de flujo magnético: Una espira circular de 20 cm de diámetro gira en un campo magnético uniforme de 5 T de intensidad a razón de 120 vueltas por minuto. Determinar: a) El flujo magnético que atraviesa la espira cuando su plano es perpendicular al campo y cuando forma un ángulo de 30° con la dirección del campo magnético. b) El valor de la f.e.m. media inducida en la espira cuando pasa de la primera a la segunda posición.
a) La expresión del flujo que atraviesa una espira circular en un campo magnético uniforme viene dada por.
Φ = B.S.cos φ = B.π.R ².cos φ

siendo B la intensidad del campo magnético, S el área limitada por la espira, R su radio y φ el ángulo que forma la perpendicular al plano de la espira con la dirección del campo. En la primera posición el ángulo φ 1 = 0° y por lo tanto:
Φ 1 = 5.π.0,2 ².cos 0° = 0,2.π.Wb
En la segunda posición el ángulo φ 2 = 90° - 30° = 60° y entonces:
Φ 2 = 5.π.0,2 ².cos 60° = 0,1.π.Wb
b) De acuerdo con la ley de Faraday-Henry, la f.e.m. media inducida en una espira en un intervalo de tiempo Δ t viene dada por:
ε = - Δ/Δt = -(Φ 2 - Φ 1)/Δt
siendo Δ t el intervalo de tiempo que transcurre entre una y otra posición. Dado que el movimiento de rotación es uniforme, se cumple la relación:
ω = Δ/Δt Δt = Δ/ ω
que permite el cálculo de Δ t.
como ω = 120 RPM = 120.2.π /60 s = 2.π /s, y Δ = Φ 2 - Φ 1 = 60° - 0° = 60° = π /3, resulta:
Δt = (π /3)/(4.π) = s/12
Sustituyendo el valor de Δ y de Δ t en la ley de Faraday-Henry resulta finalmente:
ε = -(0,1.π - 0,2.π).12 = 0,1.π.12 = 1,2.π
7. Fluidoses una sustancia que se deforma continuamente con la aplicación de una fuerza y debido a su poca cohesión intermolecular carece de forma propia.
7.1 Fluidos en reposo
La hidrostática es la rama de la mecánica de fluidos que estudia los fluidos en estado de equilibrio, es decir, sin que existan fuerzas que alteren su movimiento o posición. Los principales teoremas que respaldan el estudio de la hidrostática son el principio de Pascal y el principio de Arquímedes. segun el ing. Juan Emanuel me parece muy pobre el concepto.
Hidrostática es la parte de la Física que estudia a los fluídos en reposo. Se consideran fluídos tanto a los líquidos como a los gases, ya que un fluido es cualquier sustancia capaz de fluir.
Una de las diferencias que existen entre los líquidos y los gases es us coeficiente de compresibilidad, es decir, mientras que los líquidos son prácticamente incompresibles, los gases son muy fáciles de comprimir.
Densidad.- La densidad de un cuerpo homogéneo se define como la relación que existe entre su masa y el
volumen que ocupa: = ; siendo sus unidades en , , .
Densidades de sustancias más comunes:

SustanciaDensidad en
Agua 1
Aluminio 2.7
Acero 7.8
Hierro 7.8
Mercurio 13.6
Hielo 0.92
Cobrer 8.9
Laton 8.6
Bronce 8.6
Oro 19.3
P1ata 10.5
Platino 21.4
Alcohol etilico 0.81
Plomo 11.3
7.1.1 Presión atmosférica
Presión, en mecánica, fuerza por unidad de superficie que ejerce un líquido o un gas perpendicularmente a dicha superficie. La presión suele medirse en atmósferas (atm); en el Sistema Internacional de unidades (SI), la presión se expresa en newtons por metro cuadrado; un newton por metro cuadrado es un pascal (Pa). La atmósfera se define como 101.325 Pa, y equivale a 760 mm de mercurio.
La presión se define como fuerza entre superficie (área)
La presión es mayor a medida que el área es más pequeña, aunque la fuerza que se aplique sea la misma, es decir, la presión es inversamente proporcional a la magnitud del área y directamente proporcional a la magnitud de la fuerza.
7.1.2 Principio de Pascal
Toda presión que se ejerce sobre un líquido encerrado en un recipiente, se transmite con la misma intensidad a todos los puntos del líquido y a las paredes del recipiente que los contiene.

El principio de Pascal puede ser interpretado como una consecuencia de la ecuación fundamental de la hidrostática y del carácter altamente incompresible de los líquidos. En esta clase de fluidos la densidad es prácticamente constante, de modo que de acuerdo con la ecuación:
Donde:
, presión total a la profundidad medida en Pascales (Pa)., presión sobre la superficie libre del fluido.
, densidad del fluido., aceleración de la gravedad.
Si se aumenta la presión sobre la superficie libre, por ejemplo, la presión total en el fondo ha de aumentar en la misma medida, ya que el término ρgh no varía al no hacerlo la presión total (obviamente si el fluido fuera compresible, la densidad del fluido respondería a los cambios de presión y el principio de Pascal no podría cumplirse)
7.1.3 Principio de Arquímedes
Todo cuerpo sumergido en un fluido recibe un empuje (E), ascendente igual al peso (P) del fluido desalojado. El fluido desalojado es igual al volumen del cuerpo que se introdujo en el fluido. De acuerdo a las magnitudes del peso y del empuje tendremos:
1. Si el peso de un cuerpo es menor al empuje que recibe, flota porque desaloja menor cantidad del líquido que su volumen.
2. Si el peso de un cuerpo es igual al empuje que recibe, permanece en equilibrio, es decir, sumergido dentro del líquido.
3. Si el peso de un cuerpo es mayor al empuje que recibe, se hunde, sufriendo una disminución aparente del peso.
El empuje que recibe un cuerpo sumergido en un líquido se determina multiplicando el peso específico del líquido por el volumen desalojadote éste.
E = Pe*V
Ejemplo
1. Calcular el empuje que recibe un objeto cuyo volumen es de 20 cm3 sumergido en un líquido de Pe = 0.73 N.
Datos fórmula Sustitución Resultado
E = ?
Pe = 0.73 N
V = 20 cm3
E = Pe*V
E = 0.73*20=14.6
E = 14.6 N

7.1.4 Presión hidrostática
La presión hidrostática en un punto del interior de un fluido en reposo es directamente proporcional a la densidad del fluido, d, y a la profundidad, h.
Ph = d*h*g. La presión hidrostática sólo depende de la densidad del fluido y de la profundidad, g es constante e igual a 9,81 m/s2.
Ph = Pe * h. La presión hidrostática en cualquier punto, puede calcularse multiplicando el peso específico (Pe) del líquido por la altura (h) que hay desde la superficie libre del líquido hasta el punto considerado.
7.1.5 Tensión superficial y capilaridad
Tensión superficial
Una molecula en el interior de un liquido esta sometida a la accion de fuerzas atractivas en todas las direcciones, siendo la resultante nula. Pero si la molecula esta en la superficie del liquido, sufre la accion de un conjunto de fuerzas de cohesion, cuya resultante es perpendicular a la superficie. De aqui que sea necesario consumir cierto trabajo para mover las moleculas hacia la superficie venciendo la resistencia de estas fuerzas, por lo que las moleculas superficiales tienen mas energia que las interiores. La tension superficial de un liquido es el trabajo que debe realizarse para llevar moleculas en nu-mero suficiente desde el interior del liquido hasta la superficie para crear una nueva unidad de superficie (kgm/m2). Este trabajo es numericamente igual a la fuerza tangencial de contraccion que actuara sobre una linea hipotetica de longitud unidad situada en la superficie (kg/m). En la mayoria de los problemas presentados en las mecanicas de fluidos elementales la tension superficial no es de particular importancia. En la Tabla se dan valores de la tension superficial a (sigma) para el agua en contacto con el aire.
Capilaridad La elevacion o descenso de un liquido en un tubo capilar (o en situaciones fisicas analogas, tales como en medios porosos) vienen producidos por la tension superficial, dependiendo de las magnitu-des relativas de la cohesion del liquido y de la adhesion del liquido a las paredes del tubo. Los liquidos ascienden en tubos que mojan (adhesion > cohesion) y descienden en tubos a los que no mojan (cohe-sion > adhesion). La capilaridad tiene importancia en tubos de diametros aproximadamente meno-res de 10 mm.
7.2 Fluidos en movimiento7.2.1 Ecuación de continuidad
Esta expresión expresa la idea de que la masa de fluido que entra por el extremo de un tubo debe salir por el otro extremo.
En un fluido en movimiento, las moléculas poseen una velocidad determinada, de forma que para conocer el movimiento del fluido, hace falta determinar en cada instante su correspondiente campo de velocidades. En dicho campo es donde se obtiene el llamado tubo de corriente. El tubo de corriente es, por tanto, el espacio limitado por las líneas de corriente que pasan por el contorno de una superficie, situada en el seno de un líquido.
Para obtener la expresión de continuidad hay que partir de un elemento de volumen en forma de paralelepípedo de elemento de volumen dV, y lados dx, dy y dz.

Tratamos una pequeña masa de fluido que se mueve en un tubo. En la posición 2, con una sección de valor A2, el fluido tiene una rapidez v2 y una densidad 2.Corriente abajo en la posición A las cantidades son A1 , v1 y 1 .
Puesto que ningún fluido puede atravesar las paredes del tubo, entonces el gasto másico debe ser el mismo entre los dos puntos. Matemáticamente:
A2 v2 2 = 1 A1 v1
Esta ecuación es una particularidad de la ecuación de continuidad y está definida para el caso de fluidos incompresibles, es decir de densidad constante y estacionaria, por tanto, la velocidad en cada punto es siempre la misma, aunque varíe de unos puntos a otros.
7.2.2 Ecuación de Bernoulli
La ecuación de Bernoulli describe el comportamiento de un fluído bajo condiciones variantes y tiene la forma siguiente:
(1)
2 Parámetros
En la ecuación de Bernoulli intervienen los parámetros siguientes:
: Es la presión estática a la que está sometido el fluído, debida a las moléculas que lo rodean
: Densidad del fluído. : Velocidad de flujo del fluído.
: Valor de la aceleración de la gravedad ( en la superficie de la Tierra). : Altura sobre un nivel de referencia.
3 Aplicabilidad
Esta ecuación se aplica en la dinámica de fluídos. Un fluído se caracteriza por carecer de elasticidad de forma, es decir, adopta la forma del recipiente que la contiene, esto se debe a que las moléculas de los fluídos no están rígidamente unidas, como en el caso de los sólidos. Fluídos son tanto gases como líquidos.
Para llegar a la ecuación de Bernoulli se han de hacer ciertas suposiciones que nos limitan el nivel de aplicabilidad:
El fluído se mueve en un régimen estacionario, o sea, la velocidad del flujo en un punto no varía con el tiempo.

Se desprecia la viscosidad del fluído (que es una fuerza de rozamiento interna). Se considera que el líquido está bajo la acción del campo gravitatorio únicamente.
7.2.3 Viscosidad
Es la oposición de un fluido a las deformaciones tangenciales. Puede medirse a través de un parámetro dependiente de la temperatura llamada coeficiente de viscosidad o simplemente viscosidad.
La viscosidad es una propiedad distintiva de los fluidos. Esta ligada a la resistencia que opone un fluido a deformarse continuamente cuando se le somete a un esfuerzo de corte. Esta propiedad es utilizada para distinguir el comportamiento entre fluidos y sólidos. Además los fluidos pueden ser en general clasificados de acuerdo a la relación que exista entre el esfuerzo de corte aplicado y la velocidad de deformación.
Supóngase que se tiene un fluido entre dos placas paralelas separada a una distancia pequeña entre ellas, una de las cuales se mueve con respecto de la otra. Esto es lo que ocurre aproximadamente en un descanso lubricado. Para que la palca superior se mantenga en movimiento con respecto ala inferior, con una diferencia de velocidades V, es necesario aplicar una fuerza F, que por unidad se traduce en un esfuerzo de corte, ŋ = F / A, siendo A el área de la palca en contacto con el fluido. Se puede constatar además que el fluido en contacto con la placa inferior, que esta en reposo, se mantiene adherido a ella y por lo tanto no se mueve. Por otra parte, el fluido en contacto con la placa superior se mueve ala misma velocidad que ella. Si el espesor del fluido entre ambas placas es pequeño, se puede suponer que la variación de velocidades en su interior es lineal, de modo que se mantiene la proporción:
dv / dy = V/y
ŋ= πP^4T/8LV
donde V es el volumen del liquido de viscosidad ŋ que fluye en el tiempo t a traves de un tubo capilar de radio r y la longitud L bajo una presión de P.
Se mide el tiempo de flujo de los líquidos, y puesto que las presiones son proporcionales a las densidades de los líquidos, se puede escribir como:
n1/n2 = p1t1/p2t2
8. Óptica8.1 Reflexión y refracción de la luz
Reflexión. Cuando los rayos de luz llegan a un cuerpo en el cual no pueden continuar propagándose, salen desviados en otra dirección, es decir, se reflejan. La forma en que esto ocurre depende del tipo de superficie sobre la que inciden y del ángulo que forman sobre la misma.
Existen dos leyes de la reflexión propuestas por Descartes y son:
I. El rayo incidente, la normal y el rayo reflejado se encuentran en un mismo plano.
II. El ángulo de reflexión es igual al ángulo de incidencia.

La refracción de la luz consiste en la desviación que sufren los rayos luminosos cuando llegan a la superficie de separación entre dos sustancias o medios de diferente densidad. Sus leyes son:
I. El rayo incidente, la normal y el rayo refractado se encuentran siempre en el mismo plano.
II. Para cada par de sustancias transparentes, la relación entre el seno del ángulo de incidencia y el seno del ángulo de refracción, tiene un valor constante que recibe el nombre de índice de refracción (n). Y también puede ser calculado con le cociente de las velocidades del primer medio y segundo medio:
donde: n = índice de refracción
c = velocidad de la luz en el vacio ( km/s )
v = velocidad de la luz en el medio ( km/s )
La ley de Snell nos permite calcular la velocidad de la luz (c = 300000 km/s), en diferentes medios de propagación

Ejemplo
1. La velocidad de la luz en el agua es el 75% de la correspondiente en el aire. Determine el índice de refracción del agua.
Datos Fórmula Sustitución Resultado
n = ?
V en el aire c = 300000 km/s
V en el agua = 225000 km/s
n = 1.33
8.2 Espejos planos y esféricos
Los rayos reflejados por los espejos planos parecen proceder de imágenes- situadas detrás de dichos espejos: las imágenes carecen de existencia real, y se dice que son virtuales.
Consideremos ahora un rayo incidente RIA’ dirigido hacia A' es detenido por el espejo en I y reflejado según IA de forma que A puede también considerarse como una imagen, esta vez real, del objeto virtual A.
El hecho que la luz pueda circular a lo largo de los rayos luminosos, en ambos sentidos, sin que se cambie de trayecto, es muy importante y constituye lo que se denomina principio del retorno inverso de la luz.
Se verá más adelante que un sistema óptico cualquiera, una imagen y su objeto son conjugados, es decir, que si se coloca un objeto. Si rayos luminosos que convergen en el mismo punto son detenidos por un espejo plano, convergerán después de reflejados, formando un verdadero punto luminoso, que es entonces una imagen real.
Las imágenes producidas por loe espejos planos tienen las mismas dimensiones que los objetos correspondientes, pero de ellos no se deduce que sean iguales. El objeto y la imagen no pueden superponerse, pero son simétricos con respecto a un plano como lo son la mano derecha y la mano izquierda; como se sabe, no es posible introducir la mano derecha en un guante izquierdo, ni inversamente. Resulta, pues, que un texto escrito o impreso no puede leerse mediante reflexión en un espejo; pero si los rayos luminosos se reflejan nuevamente en un segundo espejo, la imagen sufre una segunda inversión; así, un texto se hace legible mediante dos reflexiones.
ESPEJOS ESFERICOS.- Entre los espejos cuya superficie reflectora es curva, los más sencillos de construir son los espejos esféricos. casquetes esféricos de metal o vidrio plateado, que pueden clasificarse en dos grupos, según que la superficie reflectora sea hueca o bombeada: espejos cóncavos y espejos convexos, respectivamente. Se denomina eje óptico principal la recta que por el centro C de la esfera, es perpendicular al plano base el casquete y atraviesa el espejo en el polo o vértice S. (fig. 12)

8.3 Lentes convergentes y divergentes
LENTES CONVERGENTES:
Estas lentes reciben este nombre porque al ser atravesadas por un haz de rayos paralelos los hacen “converger” en un punto determinado y dan una imagen “real”, excepto el caso en que el objeto se encuentre entre el foco y la lente.
La imagen aumentada de un objeto que se ve utilizando una lente corriente de aumento es siempre “virtual”, porque el objeto esta ubicado detrás de la lente y de su foco, no obstante ello nosotros podemos verlo gracias a que el cristalino de nuestro ojo la convierte en imagen “real” en nuestra retina.
En toda lente convergente concurren los siguientes elementos:
Eje principal: Es la recta que une los centros de las superficies esféricas a las cuales pertenecen las caras de la lente.
Centro óptico: Es un punto perteneciente al eje principal y que tiene como propiedad que todo rayo de luz que pasa por el no se desvía al atravesar la lente.
Eje secundario: Es toda recta que pasa por el centro óptico, siendo distinta del eje principal.
Foco principal: Es el punto, perteneciente al eje principal, por donde pasan todos los rayos refractados que inciden en la lente en forma paralela al eje principal.
Teniendo en cuenta que toda lente es transparente, se concluye que los rayos de luz pueden incidir sobre ella por cualquiera de las dos caras y, entonces, resulta que toda lente tiene dos focos principales. Uno de ellos es el “foco objeto” y el otro el “foco imagen” de acuerdo al paso, por ellos, de rayos incidentes o refractados, respectivamente.
Para toda lente convergente se cumple que ambos focos son reales.
Plano principal: Es el plano perpendicular al eje principal que pasa por el centro óptico.
Planos focales: Son planos, también perpendiculares al eje principal pero que pasan por cada uno de los focos de la lente.
En cuanto al aspecto, a simple vista, que presenta una lente convergente es de notar la diferencia de espesor entre el centro y los bordes, siendo el mayor el del centro.
Trayectoria de los rayos de luz en una lente convergente:

1°) Todos los rayos que sean paralelos al eje principal se refractan pasando por el foco imagen. La distancia entre la lente y el foco es la llamada distancia focal.
2°) Cualquier rayo que pase por el foco objeto, al atravesar la lente refracta paralelamente al eje principal.
3°) Los rayos de luz que pasan por el centro óptico, al atravesar la lente, no se desvían.
Las imágenes que se forman cuando la luz atraviesa una lente,
Pueden clasificarse en: (a) imágenes reales; (b) imágenes virtuales.
Las “reales” son aquellas imágenes que pueden ser recibidas en una pantalla ubicada de manera tal que la lente quede entre el objeto y dicha pantalla. Estas imágenes “reales” aparecen en la pantalla en forma invertida.
Las “virtuales” no pueden ser recibidas sobre una pantalla porque se forman con la prolongación de los rayos refractados.
“Fuerza” o “Potencia” de una lente convergente:
La potencia de una lente convergente es inversamente proporcional a su distancia focal. Esto, simplemente, significa que una lente es más potente cuanto menor es su distancia focal y, se ha establecido -por convención- que a una distancia focal de 1 metro se le asigna una potencia de 1 “dioptría” (unidad utilizada internacionalmente para determinar la potencia de una lente).
LENTES DIVERGENTES:
Estas lentes se caracterizan porque al ser atravesadas por un haz de rayos luminosos, provocan que el haz se disperse -los rayos se separan entre sí-. Por este motivo, tanto las imágenes que se obtienen como los focos de las lentes son virtuales.
El hecho de generar focos virtuales hace que las lentes divergentes sean también conocidas como “lentes negativas”.
Trayectoria de los rayos en las lentes divergentes:
La trayectoria, esta sujeta a las siguientes condiciones: (a) Cualquier rayo que sea paralelo al eje principal refracta de manera tal que sus prolongaciones pasan por el foco. (b) Todo
rayo con dirección hacia el foco objeto se refractara en forma paralela al eje principal. (c) Los rayos que pasan por el centro óptico, no se desvían.
En el caso de las lentes divergentes, las imágenes resultan siempre “virtuales”, menores que el objeto, de igual sentido que este y situadas entre la lente y el objeto.
“Potencia” de una lente divergente:
En forma similar a lo que hemos establecido para las lentes convergentes, la potencia de una lente divergente es inversamente proporcional a la distancia focal medida en metros. Teniendo en cuenta que la distancia focal siempre es negativa (para lentes divergentes) resulta que la potencia de una lente divergente toma siempre valores negativos.

Las aplicaciones y usos de las lentes son innumerables, pero, en general podemos decir que se utilizan, fundamentalmente, para formar imágenes de objetos, a veces aumentadas y a veces disminuidas.
No obstante ello, las lentes que se usan para los “anteojos” humanos, mas que a formar imágenes, están destinadas a corregirlas y a procurar que sean nítidas y precisas las imágenes formadas por nuestro cristalino.
8.4 Punto de vista contemporáneo (dualidad)
La dualidad onda corpúsculo, también llamada onda partícula, resolvió una aparente paradoja, demostrando que la luz y la materia pueden, a la vez, poseer propiedades de partícula y propiedades ondulatorias.
De acuerdo con la física clásica existen diferencias entre onda y partícula. Una partícula ocupa un lugar en el espacio y tiene masa mientras que una onda se extiende en el espacio caracterizándose por tener una velocidad definida y masa nula.
Actualmente se considera que la dualidad onda - partícula es un “concepto de la mecánica cuántica según el cual no hay diferencias fundamentales entre partículas y ondas: las partículas pueden comportarse como ondas y viceversa.” (Stephen Hawking, 2001)
Fue introducido por Louis-Victor de Broglie, físico francés de principios del siglo XX. En 1924 en su tesis doctoral propuso la existencia de ondas de materia, es decir que toda materia tenía una onda asociada a ella. Esta idea revolucionaria, fundada en la analogía con que la radiación tenía una partícula asociada, propiedad ya demostrada entonces, no despertó gran interés, pese a lo acertado de sus planteamientos, ya que no tenía evidencias de producirse. Sin embargo Einstein reconoció su importancia y cinco años después, en 1929, recibió el Nobel en física por su trabajo.
Su trabajo decía que la longitud de onda, λ, de la onda asociada a la materia era
donde h es la constante de Planck y p es la cantidad de movimiento de la partícula de materia.
8.4.1 Modelo corpuscular
Se la conoce como teoría corpuscular o de la emisión. A finales del siglo XVI, con el uso de lentes e instrumentos ópticos, empezaran a experimentarse los fenómenos luminosos, siendo el holandés Willebrord Snell, en 1620, quién descubrió experimentalmente la ley de la refracción, aunque no fue conocida hasta que, en 1638, René Descartes (1596-1650) publicó su tratado: Óptica. Descartes fue el primer gran defensor de la teoría corpuscular, diciendo que la luz se comportaba como un proyectil que se propulsaba a velocidad infinita, sin especificar absolutamente nada sobre su naturaleza, pero rechazando que cierta materia fuera de los objetos al ojo.
Explicó claramente la reflexión, pero tuvo alguna dificultad con la refracción.
Según Newton, las fuentes luminosas emiten corpúsculos muy livianos que se desplazan a gran velocidad y en línea recta. Podemos fijar ya la idea de que esta teoría además de concebir la

propagación de la luz por medio de corpúsculos, también sienta el principio de que los rayos se desplazan en forma rectilínea.
Como toda teoría física es válida en tanto y en cuanto pueda explicar los fenómenos conocidos hasta el momento, en forma satisfactoria.
Newton explicó que la variación de intensidad de la fuente luminosa es proporcional a la cantidad de corpúsculos que emite en determinado tiempo.
La reflexión de la luz consiste en la incidencia de dichos corpúsculos en forma oblicua en una superficie espejada, de manera que al llegar a ella varía de dirección pero siempre en el mismo medio.
La igualdad del ángulo de incidencia con el de reflexión se debe a la circunstancia de que tanto antes como después de la reflexión los corpúsculos conservan la misma velocidad (debido a que permanece en el mismo medio).
La refracción la resolvió expresando que los corpúsculos que inciden oblicuamente en una superficie de separación de dos medios de distinta densidad son atraídos por la masa del medio más denso y, por lo tanto, aumenta la componente de la velocidad que es la velocidad que es perpendicular a la superficie de separación, razón por la cual los corpúsculos luminosos se acercan a la normal.
El fenómeno de la birrefrigencia del espato de Islandia descubierto por el danés Bartholinus en 1669, quiso ser justificado por Newton suponiendo que los corpúsculos del rayo podían ser rectangulares y sus propiedades variar según su orientación respecto a la dirección de la propagación.
Según lo expresado por Newton, la velocidad de la luz aumentaría en los medios de mayor densidad, lo cual contradice los resultados de los experimentos realizados años después.
Esta explicación, contradictoria con los resultados experimentales sobre la velocidad de la luz en medios más densos que el vacío, obligó al abandono de la teoría corpuscular
8.4.2 Modelo ondulatorio
Propugnada por Christian Huygens en el año 1678, describe y explica lo que hoy se considera como leyes de reflexión y refracción. Define a la luz como un movimiento ondulatorio semejante al que se produce con el sonido.
Propuso el modelo ondulatorio, en el que se defendía que la luz no era mas que una perturbación ondulatoria, parecida al sonido, y de tipo mecánico pues necesitaba un medio material para propagarse. Supuso tres hipótesis:
1. todos los puntos de un frente de ondas eran centros emisores de ondas secundarias;2. de todo centro emisor se propagaban ondas en todas direcciones del espacio con velocidad
distinta en cada medio;3. como la luz se propagaba en el vacío y necesitaba un material perfecto sin rozamiento, se
supuso que todo el espacio estaba ocupado por éter, que hacía de soporte de las ondas.

hora, como los físicos de la época consideraban que todas las ondas requerían de algún medio que las transportaran en el vacío, para las ondas lumínicas se postula como medio a una materia insustancial e invisible a la cual se le llamó éter.
Justamente la presencia del éter fue el principal medio cuestionador de la teoría ondulatoria. En ello, es necesario equiparar las vibraciones luminosas con las elásticas transversales de los sólidos sin que se transmitan, por lo tanto, vibraciones longitudinales. Aquí es donde se presenta la mayor contradicción en cuanto a la presencia del éter como medio de transporte de ondas, ya que se requeriría que éste reuniera alguna característica sólida pero que a su vez no opusiera resistencia al libre transito de los cuerpos sólidos. (Las ondas transversales sólo se propagan a través de medios sólidos.)
En aquella época, la teoría de Huygens no fue muy considerada, fundamentalmente, y tal como ya lo mencionamos, dado al prestigio que alcanzó Newton. Pasó más de un siglo para que fuera tomada en cuenta la Teoría Ondulatoria de la luz. Los experimentos del médico inglés Thomas Young sobre los fenómenos de interferencias luminosas, y los del físico francés Auguste Jean Fresnel sobre la difracción fueron decisivos para que ello ocurriera y se colocara en la tabla de estudios de los físicos sobre la luz, la propuesta realizada en el siglo XVII por Huygens.
Young demostró experimentalmente el hecho paradójico que se daba en la teoría corpuscular de que la suma de dos fuentes luminosas pueden producir menos luminosidad que por separado. En una pantalla negra practica dos minúsculos agujeros muy próximos entre sí: al acercar la pantalla al ojo, la luz de un pequeño y distante foco aparece en forma de anillos alternativamente brillantes y oscuros. ¿Cómo explicar el efecto de ambos agujeros que por separado darían un campo iluminado, y combinados producen sombra en ciertas zonas? Young logra explicar que la alternancia de las franjas por la imagen de las ondas acuáticas. Si las ondas suman sus crestas hallándose en concordancia de fase, la vibración resultante será intensa. Por el contrario, si la cresta de una onda coincide con el valle de la otra, la vibración resultante será nula. Deducción simple imputada a una interferencia y se embriona la idea de la luz como estado vibratorio de una materia insustancial e invisible, el éter, al cual se le resucita.
Ahora bien, la colaboración de Auguste Fresnel para el rescate de la teoría ondulatoria de la luz estuvo dada por el aporte matemático que le dio rigor a las ideas propuestas por Young y la explicación que presentó sobre el fenómeno de la polarización al transformar el movimiento ondulatorio longitudinal, supuesto por Huygens y ratificado por Young, quien creía que las vibraciones luminosas se efectuaban en dirección paralela a la propagación de la onda luminosa, en transversales. Pero aquí, y pese a las sagaces explicaciones que incluso rayan en las adivinanzas dadas por Fresnel, inmediatamente queda presentada una gran contradicción a esta doctrina, ya que no es posible que se pueda propagar en el éter la luz por medio de ondas transversales, debido a que éstas sólo se propagan en medios sólidos.
En su trabajo, Fresnel explica una multiplicidad de fenómenos manifestados por la luz polarizada. Observa que dos rayos polarizados ubicados en un mismo plano se interfieren, pero no lo hacen si están polarizados entre sí cuando se encuentran perpendicularmente. Este descubrimiento lo invita a pensar que en un rayo polarizado debe ocurrir algo perpendicularmente en dirección a la propagación y establece que ese algo no puede ser más que la propia vibración luminosa. La conclusión se impone: las vibraciones en la luz no pueden ser longitudinales, como Young lo propusiera, sino perpendiculares a la dirección de propagación, transversales.
Las distintas investigaciones y estudios que se realizaron sobre la naturaleza de la luz, en la época en que nos encontramos de lo que va transcurrido del relato, engendraron aspiraciones de mayores conocimientos sobre la luz. Entre ellas, se encuentra la de lograr medir la velocidad de la luz con mayor exactitud que la permitida por las observaciones astronómicas. Hippolyte Fizeau (1819- 1896) concretó el proyecto en 1849 con un clásico experimento. Al hacer pasar la luz reflejada por

dos espejos entre los intersticios de una rueda girando rápidamente, determinó la velocidad que podría tener la luz en su trayectoria, que estimó aproximadamente en 300.000 km./s. Después de Fizeau, lo siguió León Foucault (1819 – 1868) al medir la velocidad de propagación de la luz a través del agua. Ello fue de gran interés, ya que iba a servir de criterio entre la teoría corpuscular y la ondulatoria.
La primera, como señalamos, requería que la velocidad fuese mayor en el agua que en el aire; lo contrario exigía, pues, la segunda. En sus experimentos, Foucault logró comprobar, en 1851, que la velocidad de la luz cuando transcurre por el agua es inferior a la que desarrolla cuando transita por el aire. Con ello, la teoría ondulatoria adquiere cierta preeminencia sobre la corpuscular, y pavimenta el camino hacia la gran síntesis realizada por Maxwell.
En 1670, por primera vez en la historia, el astrónomo danés Olaf Roemer pudo calcular la velocidad de la luz.
Se hallaba estudiando los eclipses de uno de los satélites de Júpiter, cuyo período había determinado tiempo atrás. Estaba en condiciones de calcular cuales serían los próximos eclipses. Se dispuso a observar uno de ellos, y con sorpresa vio que a pesar de que llegaba el instante tan cuidadosamente calculado por él, el eclipse no se producía y que el satélite demoró 996 seg. en desaparecer.
Roemer realizó sus primeros cálculos cuando la tierra se encontraba entre el Sol y Júpiter; pero cuando observó el retraso en el eclipse era el Sol quien se encontraba entre la Tierra y Júpiter.
Por lo tanto la luz debía recorrer una distancia suplementaria de 299.000.000 Km., que es el diámetro de la órbita terrestre, por lo tanto:
Vel. Luz = Diam. Órbita terrestre 299.000.000 Km / Atraso observado 996 seg. = 300.200 Km/seg.
Observaciones posteriores llevaron a la conclusión que el atraso en cuestión era de 1.002 seg. , lo cual da por resultado que la velocidad de la luz sería de 298.300 Km/seg.
Si se consideraba onda, la luz debería atravesar los obstáculos, como el sonido. Como no era así, se precisaba de alguna nueva hipótesis. Aún mas considerando que tampoco podía explicar los fenómenos de polarización. Todos estos problemas, junto al prestigio de Newton que defendía la teoría contraria, relegó a un segundo plano, durante algún tiempo, el modelo ondulatorio.
En 1849, el físico francés Fizeau, logró medir la velocidad de la luz con una experiencia hecha en la tierra.
Envió un rayo de luz, por entre los dientes de una rueda dentada que giraba a gran velocidad, de modo que se reflejara en un espejo y volviera hacia la rueda.
Esta relación de velocidad entre el camino recorrido por la luz en su ida y vuelta y las revoluciones de la rueda dentada, fue la que tomó Fizeau de base para calcular la velocidad de la luz.
Podemos escribir: t = 2d / v
Si la rueda tiene N dientes y N espacios, y da n vueltas por segundo y pasan en 1 seg. 2 Nn dientes y espacios
t= 1 /.2Nn

Cuando no llega mas luz al observador es evidente que estos tiempos son iguales y por lo tanto tenemos:
2d / v = 1 / 2Nn
de donde v = 4 d Nn
Fizeau colocó el espejo a 8.633 m del observador, la rueda tenía 760 dientes y giraba a 12,6 revoluciones por segundo.
Si aplicamos la fórmula obtenida, resultará:
V = 313.274 Km./seg.
León Foucault y casi simultáneamente Fizeau, hallaron en 1850 un método que permite medir la velocidad de la luz en espacios reducidos.
La idea consiste en enviar un haz de luz sobre un espejo giratorio haciéndole atravesar una lámina de vidrio semitransparente y semirreflectora, un espejo fijo devuelve el rayo y atraviesa luego lámina observándose la mancha luminosa en una pantalla.
Con este método se obtuvo que:
V = 295.680 Km./seg.
Luego Foucault junto a concibió la idea de calcular la velocidad de la luz en otro medio que no sea el aire.
Midieron la velocidad de la luz en el agua y obtuvieron un resultado experimental que decidió la controversia a favor de la teoría ondulatoria.
En general todas las mediciones de que se tiene conocimiento obtuvieron resultados entre 298.000 Km/seg y 313.300 Km/seg sin embargo se toma como velocidad de la luz la de 300.000 Km/seg por ser un término medio entre los valores obtenidos y por ser una cifra exacta que facilitan los cálculos.
9. Física contemporánea
Para su estudio la física se puede dividir en dos grandes etapas: la Física clásica, la Física moderna. La primera se encarga del estudio de aquellos fenómenos que ocurren a una velocidad relativamente pequeña comparada con la velocidad de la luz en el vacío y cuyas escalas espaciales son muy superiores al tamaño de átomos y moléculas. La segunda se encarga de los fenómenos que se producen a la velocidad de la luz o valores cercanos a ella o cuyas escalas espaciales son del orden del tamaño del átomo o inferiores; fue desarrollada en los inicios del siglo XX.9.1 Estructura atómica de la materia

9.1.1 Modelos atómicosAño Científico Descubrimientos experimentales Modelo atómico
1808
John Dalton
Durante el s.XVIII y principios del XIX algunos científicos habían investigado distintos aspectos de las reacciones químicas, obteniendo las llamadas leyes clásicas de la Química.
La imagen del átomo expuesta por Dalton en su teoría atómica, para explicar estas leyes, es la de minúsculas partículas esféricas, indivisibles e inmutables, iguales entre sí en cada elemento químico.
1897
J.J. Thomson
Demostró que dentro de los átomos hay unas partículas diminutas, con carga eléctrica negativa, a las que se llamó electrones.
De este descubrimiento dedujo que el átomo debía de ser una esfera de materia cargada positivamente, en cuyo interior estaban incrustados los electrones. (Modelo atómico de Thomson.)
1911
E. Rutherford
Demostró que los átomos no eran macizos, como se creía, sino que están vacíos en su mayor parte y en su centro hay un diminuto núcleo.
Dedujo que el átomo debía estar formado por una corteza con los electrones girando alrededor de un núcleo central cargado positivamente. (Modelo atómico de Rutherford.)
1913
Niels Bohr
Espectros atómicos discontinuos originados por la radiación emitida por los átomos excitados de los elementos en estado gaseoso.
Propuso un nuevo modelo atómico, según el cual los electrones giran alrededor del núcleo en unos niveles bien definidos. (Modelo atómico de Bohr.)
9.1.2 El experimento de Rutherford
El experimento de Rutherford, también llamado "experimento de la lámina de oro", fue realizado por Hans Geiger y Ernest Marsden en 1909, bajo la dirección de Ernest Rutherford en los Laboratorios de Física de la Universidad de Manchester. Los resultados obtenidos y el posterior análisis tuvieron como consecuencia la rectificación del modelo atómico de Thomson (modelo atómico del panqué con pasas) y la propuesta de un modelo nuclear para el átomo.
El experimento consistió en "bombardear" con un haz de partículas alfa una fina lámina de oro y observar cómo las láminas de diferentes metales afectaban a la trayectoria de dichos rayos.
Las partículas alfa se obtenían de la desintegración de una sustancia radiactiva, el polonio. Para obtener un fino haz se colocó el polonio en una caja de plomo, el plomo detiene todas las partículas, menos las que salen por un pequeño orificio practicado en la caja. Perpendicular a la trayectoria del haz se interponía la lámina de metal. Y, para la detección de trayectoria de las partículas, se empleó una pantalla con sulfuro de zinc que produce pequeños destellos cada vez que una partícula alfa choca con él.
Según el modelo de Thomson, las partículas alfa atravesarían la lámina metálica sin desviarse demasiado de su trayectoria:

La carga positiva y los electrones del átomo se encontraban dispersos de forma homogénea en todo el volumen del átomo. Como las partículas alfa poseen una gran masa (8.000 veces mayor que la del electrón) y gran velocidad (unos 20.000 km/s), la fuerzas eléctricas serían muy débiles e insuficientes para conseguir desviar las partículas alfa.
Además, para atravesar la lámina del metal, estas partículas se encontrarían con muchos átomos, que irían compensando las desviaciones hacia diferentes direcciones.
Pero se observó que un pequeño porcentaje de partículas se desviaban hacia la fuente de polonio, aproximadamente una de cada 8.000 partícula al utilizar una finísima lámina de oro con unos 200 átomos de espesor. En palabras de Rutherford ese resultado era "tan sorprendente como si le disparases balas de cañón a una hoja de papel y rebotasen hacia ti".
Rutherford concluyó que el hecho de que la mayoría de las partículas atravesaran la hoja metálica, indica que gran parte del átomo está vacío, que la desviación de las partículas alfa indica que el deflector y las partículas poseen carga positiva, pues la desviación siempre es dispersa. Y el rebote de las partículas alfa indica un encuentro directo con una zona fuertemente positiva del átomo y a la vez muy densa.
El modelo atómico de Rutherford mantenía el planteamiento de Thomson, de que los átomos poseen electrones, pero su explicación sostenía que todo átomo estaba formado por un núcleo y una corteza. El núcleo debía tener carga positiva, un radio muy pequeño y en él se concentraba casi toda la masa del átomo. La corteza estaría formada por una nube de electrones que orbitan alrededor del núcleo.
Según Rutherford, las órbitas de los electrones no estaban muy bien definidas y formaban una estructura compleja alrededor del núcleo, dándole un tamaño y forma indefinida. También calculó que el radio del átomo, según los resultados del experimento, era diez mil veces mayor que el núcleo mismo, lo que implicaba un gran espacio vacío en el átomo.
9.1.3 Espectroscopía y el modelo atómico de Bohr
La ciencia que estudia los espectros en la física y la física química es la espectroscopia. Esta ciencia se basa en que cada elemento químico tiene su espectro característico. Los científicos alemanes Gustav Kirchoff y Robert Bunsen comprobaron esto en 1859 mediante la aplicación de un espectroscopio de prisma desarrollado por ellos mismos al análisis químico. Los dos científicos alemanes mencionados anteriormente descubrieron que cada elemento emite y absorbe distintos tipos de ondas de luz, y que por tanto cada elemento tiene un espectro distinto.
Como se ha indicado antes, los aparatos empleados para estudiar los espectros son el espectroscopio, el espectrógrafo y el espectrofotómetro.
- El primero está formado por una rendija por la que entra la luz procedente de una fuente externa, un conjunto de lentes, un prisma y un ocular. La luz que se quiere analizar pasa por una lente

colimadora, que la convierte en un haz de luz estrecho y paralelo, y luego por el prisma. Una nueva lente enfoca las distintas ondas de luz que salen del prisma sobre una pantalla, reflejándose en ésta las líneas espectrales, cada una de un color diferente.
- En el segundo, la lente de enfoque es sustituida por una cámara fotográfica. Al llegar las luces a la película se impresionan sobre la misma, y más tarde se puede calcular su longitud de onda según sus posiciones en la película. Los espectrógrafos son útiles en casi todas las regiones del espectro, pero como el vidrio no transmite las radiaciones ultravioleta e infrarroja, las lentes a usar deben de ser de otro material, como el cuarzo.
- El tercer tipo se usa para medir la intensidad de un espectro determinado en comparación con la intensidad de luz de una fuente patrón. De esta manera se puede determinar la concentración de la sustancia que ha producido el espectro. Estos aparatos son muy útiles para estudiar las partes no visibles del espectro.
También existe una variante del prisma, que se emplea para estudiar toda la zona del espectro más allá de la zona ultravioleta. Consiste en una superficie especular de metal sobre la cual se han trazado varias líneas paralelas con un diamante. De esta manera, la luz se dispersa de una forma más limpia y se consigue una resolución del espectro mucho mayor.
TRABAJOS DE NIELS BOHR
En 1913, el físico danés Niels Bohr revisó radicalmente los modelos atómicos existentes, y llegó a la conclusión de que no eran válidos. Valiéndose de la teoría de Planck, Bohr ideó un nuevo modelo, con estas características:
El electrón sólo puede moverse sin emitir energía en determinadas órbitas permitidas llamadas estacionarias.
Sólo son posibles las órbitas en las que se cumple la ecuación
Donde m v es el momento lineal (masa · velocidad del electrón), r es el radio de la órbita y n es el número cuántico. Este número indica los distintos subniveles de las órbitas del electrón.
De todas maneras, el modelo de Bohr no consiguió explicar satisfactoriamente los átomos con más de un electrón. Pero en 1915, el físico alemán Sommerfield demostró que las órbitas que Bohr creía circulares también podían ser elípticas, por lo que cada órbita resultaba ser varias, muy próximas y de energía diferente, constituyendo subniveles de energía. De esta manera, a los niveles de energía de Bohr les correspondía el número cuántico principal, n, mientras que a los subniveles de energía de Sommerfield se les asignó el número cuántico secundario, l.
Más tarde, el holandés Zeeman descubrió que las órbitas de Sommerfield tienen orientaciones distintas en el espacio. Esto provoca el llamado efecto Zeeman, por el cual las rayas espectrales sufren un desdoblamiento al efectuar el análisis espectral del átomo bajo la influencia de un intenso campo magnético. Para expresar la cuantización de esas orientaciones se introdujo el número cuántico magnético, ml, que representa la distinta orientación de las órbitas en el espacio dentro de una misma energía. Y ya en 1922, Stern y Gerlach descubrieron que el electrón en cada una de las orientaciones de las órbitas de Sommerfield podía tener un sentido de giro o su opuesto. Para expresarlo apareció un nuevo número cuántico, el número cuántico de spin, ms.

9.2 Física nuclear
a física nuclear es una rama de la física que estudia las propiedades y el comportamiento de los núcleos atómicos. La física nuclear es conocida mayoritariamente por la sociedad por el aprovechamiento de la energía nuclear en centrales nucleares y en el desarrollo de armas nucleares, tanto de fisión como de fusión nuclear. En un contexto más amplio, se define la física nuclear y de partículas como la rama de la física que estudia la estructura fundamental de la materia y las interacciones entre las partículas subatómicas.
9.2.1 El descubrimiento de la radiactividad
La radiactividad fue descubierta en las sales de uranio por el físico francés Henri Becquerel en 1896.9.2.2 Decaimiento radiactivo
El decaimiento radiactivo de un núcleo atómico es un proceso por el cual se emite una partícula.
Hipótesis 1: Al producirse en los núcleos atómicos y dadas el corto alcance de las fuerzas nucleares, diferentes núcleos no se interfieren entre sí y los sucesos de decaimiento radiactivo pueden considerarse independientes entre sí.
Hipótesis 2: Otra hipótesis razonable es que la probabilidad de desintegración en un intervalo diferencial dt es proporcional a la longitud del intervalo.
Hipótesis 3: Y si a las dos hipótesis anteriores se le añade la de una probabilidad despreciable para la ocurrencia de más de una desintegración en el intervalo diferencial dt, tendremos que se cumplen las tres hipótesis de un proceso de Poisson y por lo tanto se puede suponer una distribución de probabilidad de Poisson para el decaimiento radiactivo.
Al evaluar el comportamiento promedio para un gran número de puntos se puede aprovechar hipótesis 2 y expresar el número de núcleos promedio que se desintegran por unidad de tiempo como:
donde λ es el valor medio del número de desintegraciones por unidad de tiempo y el signo negativo expresa que el número de núcleos padre disminuye con el tiempo.
La solución para la ecuación diferencial anterior es:
N = N(0)e − λt
9.2.3 Detectores de radiactividad
El medidor de radioactividad profesional es un instrumento de medición preciso para radiación alfa, beta y gamma. Para ello este aparato dispone de un amplio rango de medición y puede emplearse tantos para mediciones esporádicas in situ como para mediciones de larga duración o para la simple inspección. El medidor de radioactividad proporciona una medición certificada de la radiación ambiental natural y de la radiación elevada artificialmente hasta 500 veces el valor

límite ajustado.Las aplicaciones son múltiples, por ejemplo puede detectar radiaciones naturales ínfimas, así como la radiación de rayos X en el sector de la medicina. Habitualmente se ha empleado este contador Geiger en centrales de energía atómica. Cada vez cobra más importancia en el control de materiales de importación, igual que en la medición de alimentos que han sido irradiados. También se puede medir la radiación radio- activa natural, como la que aparece cerca del mar. Cumple con su servicio igualmente en el control de materiales de construcción en la renovación de fábricas ...Existen tres versiones de este medidor de radioactividad: la versión estándar en el modelo GS1, con señalización acústica (Ticker) en el modelo GS2 o la versión para enviar datos al PC continuamente (Online) en el modelo GS3.Los valores de medición de la radiación pueden guardarse en la memoria del mismo medidor de radio- actividad y pueden ser transmitidos y valorados en un ordenador por medio de un equipo incluido en el envío (software y cable de datos RS-232). Este equipo se puede utilizar para realizar mediciones de radioactividad in situ. Con el modelo Gamma-Scout Online (GS3), se pueden enviar datos al PC de manera continua mediante impulsos de entre 10, 30 o 60 segundos.
Características- Aparato de precisión comprobado(a cada medidor de radioactividad se le haceun control final, esta revisión final la realiza elInstituto para la protección contra radiaciones,inspeccionado por una Escuela Técnica estataly se le extiende un certificado de control)- Todo tipo de radiaciones(el aparato determina radiación alfa,beta y gamma)- Duración(este aparato inspecciona la radiación día y noche / no es necesario encender o apagar al igual que cambiar la batería /la batería dura hasta 10 años)- Gran pantalla- Memoria de datos- Valoración de los datos de radiación en el PC(el software del envío le posibilita transmitirlos datos de medición desde el aparato a un ordenador para así poder valorarlos)- Certificado( la seguridad del GAMMA - SCOUT ® estácontrolada por TÜV y cumple con el estándareuropeo CE, así como con el estándar ameri-cano FCC-15 / se puede realizar también enaviones - Versión (GS2)(El aparato GAMMA-SCOUT® w / ALERT produce una señal acústica si la radiación se encuentra por encima del valor límite dado)

9.2.4 Fisión y fusión nucleares
Los conceptos de fisión y fusión nuclear difieren en las características de formación de cada uno. De esta forma se encuentra que la fisión (utilizada en las bombas y reactores nucleares) consiste en el "bombardeo" de partículas subatómicas al uranio (o a cualquier elemento transuránico, siempre y cuando sus características lo permitan), trayendo como consecuencia la fisión (de allí su nombre) del átomo y con esto la de los demás átomos adyacentes al bombardeado en reacción en cadena. Mientras que, la fusión es la unión bajo ciertas condiciones (altas presiones, altas temperaturas, altas cargas, etc.) de dos o más átomos y genera mucha más energía que la fisión.
Fusión [editar]
Véase también: Fusión nuclear
La fusión representa diversos problemas, ya que a nivel atómico las cargas de los átomos se repelen entre sí impidiendo la unión de estos, por esto se recurre generalmente a la utilización de isotópos ligeros, con menor carga eléctrica (como el hidrógeno y sus isótopos deuterio y tritio). En ciertas condiciones, definidas por los criterios de Lawson, se lograría la fusión de dichos átomos. Para ello primero se les debe convertir al estado de plasma, ionizándolos, favoreciendo a la unión. Esto se consigue mediante dos métodos básicos: el confinamiento magnético y el confinamiento inercial. Existen varias posibilidades para producir la fusión a partir de los isótopos del hidrógeno.
La energía de la fusión aun no se ha podido aprovechar con fines prácticos.
Representa algunas ventajas en relación a la fisión nuclear:
1. Produce menos residuos nucleares.2. En los diseños actuales se necesita un aporte exterior de energía para que la reacción en
cadena se mantenga.3. Produce más energía por reacción.
También posee desventajas:
1. La reacción más energética es deuterio+tritio, y el tritio es un isótopo muy escaso en la Tierra.
2. Las condiciones necesarias son tan extremas que solo se dan en el centro de las estrellas, por lo que son muy difíciles de alcanzar y controlar.
Las técnicas conocidas de alcanzar las condiciones impuestas por los criterios de Lawson son dos:
El confinamiento magnético, principalmente en tokamaks como el ITER. El confinamiento inercial, mediante el uso de láseres o aceleradores de partículas, como por
ejemplo en el National Ignition Facility.
9.2.5 Aplicaciones de la radiactividad y la energía nuclear
El trazado isotópico en biología y en medicina

Los diferentes isótopos de un elemento tienen las mismas propiedades químicas. El reemplazo de uno por otro en una molécula no modifica, por consiguiente, la función de la misma. Sin embargo, la radiación emitida permite detectarla, localizarla, seguir su movimiento e, incluso, dosificarla a distancia. El trazado isotópico ha permitido estudiar así, sin perturbarlo, el funcionamiento de todo lo que tiene vida, de la célula al organismo entero. En biología, numerosos adelantos realizados en el transcurso de la segunda mitad del siglo XX están vinculados a la utilización de la radioactividad: funcionamiento del genoma (soporte de la herencia), metabolismo de la célula, fotosíntesis, transmisión de mensajes químicos (hormonas, neurotransmisores) en el organismo.
Los isótopos radioactivos se utilizan en la medicina nuclear, principalmente en las imágenes médicas, para estudiar el modo de acción de los medicamentos, entender el funcionamiento del cerebro, detectar una anomalía cardiaca, descubrir las metástasis cancerosas.
Las radiaciones y la radioterapia
Las radiaciones ionizantes pueden destruir preferentemente las células tumorales y constituyen una terapéutica eficaz contra el cáncer, la radioterapia, que fue una de las primeras aplicaciones del descubrimiento de la radioactividad.
En Francia, entre el 40 y el 50% de los cánceres se tratan por radioterapia, a menudo asociada a la quimioterapia o la cirugía. La radioactividad permite curar un gran número de personas cada año.
Las diferentes formas de radioterapia:
La curioterapia, utiliza pequeñas fuentes radioactivas (hilos de platino - iridio, granos de cesio) colocados cerca del tumor.
La tele radioterapia, consiste en concentrar en los tumores la radiación emitida por una fuente exterior.
La inmunorradioterapia, utiliza vectores radio marcados cuyos isótopos reconocen específicamente los tumores a los que se fijan para destruirlos.
La esterilización
La irradiación es un medio privilegiado para destruir en frío los microorganismos: hongos, bacterias, virus... Por esta razón, existen numerosas aplicaciones para la esterilización de los objetos, especialmente para el material médico-quirúrgico.
La protección de las obras de arte
El tratamiento mediante rayos gamma permite eliminar los hongos, larvas, insectos o bacterias alojados en el interior de los objetos a fin de protegerlos de la degradación. Esta técnica se utiliza en el tratamiento de conservación y de restauración de objetos de arte, de etnología, de arqueología.
La elaboración de materiales
La irradiación provoca, en determinadas condiciones, reacciones químicas que permiten la elaboración de materiales más ligeros y más resistentes, como aislantes, cables eléctricos, envolventes termo retractables, prótesis, etc.
La radiografía industrial X o g
Consiste en registrar la imagen de la perturbación de un haz de rayos X o g provocada por un objeto. Permite localizar los fallos, por ejemplo, en las soldaduras, sin destruir los materiales.

Los detectores de fugas y los indicadores de nivel
La introducción de un radioelemento en un circuito permite seguir los desplazamientos de un fluido, detectar fugas en las presas o canalizaciones subterráneas.
El nivel de un líquido dentro de un depósito, el espesor de una chapa o de un cartón en curso de su fabricación, la densidad de un producto químico dentro de una cuba... pueden conocerse utilizando indicadores radioactivos.
Los detectores de incendio
Una pequeña fuente radioactiva ioniza los átomos de oxígeno y de nitrógeno contenidos en un volumen reducido de aire. La llegada de partículas de humo modifica esta ionización. Por esta razón se realizan y se utilizan en los comercios, fábricas, despachos... detectores radioactivos sensibles a cantidades de humo muy pequeñas.
Las pinturas luminiscentes
Se trata de las aplicaciones más antiguas de la radioactividad para la lectura de los cuadrantes de los relojes y de los tableros de instrumentos para la conducción de noche.
La alimentación de energía de los satélites
Las baterías eléctricas funcionan gracias a pequeñas fuentes radioactivas con plutonio 239, cobalto 60 o estroncio 90. Estas baterías se montan en los satélites para su alimentación energética. Son de tamaño muy reducido y pueden funcionar sin ninguna operación de mantenimiento durante años.
La producción de electricidad
Las reacciones en cadena de fisión del uranio se utilizan en las centrales nucleares que, en Francia, producen más del 75% de la electricidad.
1. El ciclo del combustible nuclear
En un reactor, la fisión del uranio 235 provoca la formación de núcleos radioactivos denominados productos de fisión. La captura de neutrones por el uranio 238 produce un poco de plutonio 239 que puede proporcionar también energía por fisión.
Sólo una ínfima parte del combustible colocado en un reactor se quema en la fisión del núcleo. El combustible que no ha sido consumido y el plutonio formado se recuperan y se reciclan para producir de nuevo electricidad. Los otros elementos formados en el transcurso de la reacción se clasifican en tres categorías de residuos en función de su actividad, para ser embalados y luego almacenados.
2. La seguridad nuclear
La utilización de la fantástica fuente de energía contenida en el núcleo de los átomos implica el respeto riguroso de un conjunto de reglas de seguridad nuclear que permita asegurar el correcto funcionamiento de las centrales nucleares y la protección de la población.
3. Los residuos nuclearesToda clase de actividad humana genera residuos. La industria nuclear no es una excepción a esta regla. Francia produce, de promedio, por año y por habitante:

5.000 Kg de residuos, de los cuales 100 Kg de residuos tóxicos, que incluyen 1 Kg de residuos nucleares de los cuales 5 gr de residuos son de alta actividad.
No sabemos aún destruir los residuos radioactivos. Su actividad disminuye naturalmente en el tiempo, más o menos rápido en función de su período. Deben utilizarse, por consiguiente, técnicas de confinamiento y de almacenamiento.
La reducción del volumen y de la actividad de los residuos radioactivos es, en Francia, un objetivo prioritario para la investigación. La amplitud del comportamiento a largo plazo de los residuos acumulados también es un eje primordial en la investigación
9.3 Otras formas de energía
Energía nuclear
Energía liberada durante la fisión o fusión de núcleos atómicos. Las cantidades de energía que pueden obtenerse mediante procesos nucleares superan con mucho a las que pueden lograrse mediante procesos químicos, que sólo implican las regiones externas del átomo.
La energía de cualquier sistema, ya sea físico, químico o nuclear, se manifiesta por su capacidad de realizar trabajo o liberar calor o radiación. La energía total de un sistema siempre se conserva, pero puede transferirse a otro sistema o convertirse de una forma a otra.
Energía cinética
Energía que un objeto posee debido a su movimiento. La energía cinética depende de la masa y la velocidad del objeto según la ecuación
E = 1mv2
donde m es la masa del objeto y v2 la velocidad del mismo elevada al cuadrado. El valor de E también puede derivarse de la ecuación
E = (ma)d
donde a es la aceleración de la masa m y d es la distancia a lo largo de la cual se acelera. Las relaciones entre la energía cinética y la energía potencial, y entre los conceptos de fuerza, distancia, aceleración y energía, pueden ilustrarse elevando un objeto y dejándolo caer.
Cuando el objeto se levanta desde una superficie se le aplica una fuerza vertical. Al actuar esa fuerza a lo largo de una distancia, se transfiere energía al objeto. La energía asociada a un objeto situado a determinada altura sobre una superficie se denomina energía potencial. Si se deja caer el objeto, la energía potencial se convierte en energía cinética. Véase Mecánica.
Energía potencial
Energía almacenada que posee un sistema como resultado de las posiciones relativas de sus componentes. Por ejemplo, si se mantiene una pelota a una cierta distancia del suelo, el sistema

formado por la pelota y la Tierra tiene una determinada energía potencial; si se eleva más la pelota, la energía potencial del sistema aumenta. Otros ejemplos de sistemas con energía potencial son una cinta elástica estirada o dos imanes que se mantienen apretados de forma que se toquen los polos iguales.
Para proporcionar energía potencial a un sistema es necesario realizar un trabajo. Se requiere esfuerzo para levantar una pelota del suelo, estirar una cinta elástica o juntar dos imanes por sus polos iguales. De hecho, la cantidad de energía potencial que posee un sistema es igual al trabajo realizado sobre el sistema para situarlo en cierta configuración. La energía potencial también puede transformarse en otras formas de energía. Por ejemplo, cuando se suelta una pelota situada a una cierta altura, la energía potencial se transforma en energía cinética.
Fuentes Renovables
Energía Hidráulica
Ya desde la antigüedad, se reconoció que el agua que fluye desde un nivel superior a otro inferior posee una determinada energía cinética susceptible de ser convertida en trabajo, como demuestran los miles de molinos que a lo largo de la historia fueron construyéndose a orillas de los ríos.
Más recientemente, hace más de un siglo, se aprovecha la energía hidráulica para generar electricidad, y de hecho fue una de las primeras formas que se emplearon para producirla.El aprovechamiento de la energía potencial del agua para producir energía eléctrica utilizable, constituye en esencia la energía hidroeléctrica. Es por tanto, un recurso renovable y autóctono. El conjunto de instalaciones e infraestructura para aprovechar este potencial se denomina central hidroeléctrica.
Hoy en día, con los problemas medioambientales, se ven las cosas desde otra perspectiva. Esto ha hecho que se vayan recuperando infraestructuras abandonadas dotándolas de nuevos equipos automatizados y turbinas de alto rendimiento. En consecuencia, el impacto ambiental no es más del que ya existía o por lo menos inferior al de una gran central. A estas instalaciones, con potencia inferior a 5.000KW se les denomina minihidráulicas.
Las minicentrales hidroeléctricas están condicionadas por las características del lugar de emplazamiento. La topografía del terreno influye en la obra civil y en la selección del tipo de máquina.
Centrales de aguas fluyentes

Aquellas instalaciones que mediante una obra de toma, captan una parte del caudal del río y lo conducen hacia la central para su aprovechamiento, para después devolverlo al cauce del río.
Centrales de pie de presa
Son los aprovechamientos hidroeléctricos que tienen la opción de almacenar las aportaciones de un río mediante un embalse. En estas centrales se regulan los caudales de salida para utilizarlos cuando se precisen
Centrales de canal de riego o abastecimiento
Se pueden distinguir dos tipos:
Con desnivel existente en el propio canal
Se aprovecha mediante la instalación de una tubería forzada, que conduce el agua a la central, devolviéndola posteriormente al curso normal del canal.
Con desnivel existente entre el canal y el curso de un río cercano
En este caso la central se instala cercana al río y se aprovechan las aguas excedentes en el canal.
A la hora de realizar un proyecto de una minicentral hidroeléctrica y dependiendo del tipo por su emplazamiento, la determinación del caudal y la altura de salto determinará la potencia a instalar, así como, el tipo de miniturbina.
Existen varios tipos de miniturbinas:
De reacción, que aprovecha la energía de presión del agua en energía cinética en el estator, tanto en la entrada como en la salida, estas aprovechan la altura disponible hasta el nivel de desagüe.
Kaplan: se componen básicamente de una cámara de entrada que puede ser abierta o cerrada, un distribuidor fijo, un rodete con cuatro o cinco palas fijas en forma de hélice de barco y un tubo de aspiración.
Francis: caracterizada por que recibe el flujo de agua en dirección radial, orientándolo hacia la salida en dirección axial.

Se compone de:
Un distribuidor que contiene una serie de álabes fijos o móviles que orientan el agua hacia el rodete. Un rodete formado por una corona de paletas fijas, torsionadas de forma que reciben el agua en dirección radial y lo orientan axialmente. Una cámara de entrada, que puede ser abierta o cerrada de forma espiral, para dar una componente radial al flujo de agua. Un tubo de aspiración o de salida de agua, que puede ser recto o acodado y se encarga de mantener la diferencia de presiones necesaria para el buen funcionamiento de la turbina.
De flujo cruzado: también conocida como de doble impulsión, constituida principalmente por un inyector de sección rectangular provisto de un álabe longitudinal que regula y orienta el caudal que entra en la turbina, y un rodete de forma cilíndrica, con múltiples palas dispuestas como generatrices y soldadas por los extremos a discos terminales.
El caudal que entra en la turbina es orientado por el álabe del inyector, hacia las palas del rodete, produciendo un primer impulso. Posteriormente, atraviesa el interior del rodete y proporciona un segundo impulso, al salir del mismo y caer por el tubo de aspiración.
De acción, que aprovecha la energía de presión del agua para convertirla en energía cinética en el estator, estas aprovechan la altura disponible hasta el eje de la turbina.
Pelton: Consta de un disco circular que tiene montados en su periferia unas paletas en forma de doble cuchara y de un inyector que dirige y regula el chorro de agua que inciden sobre las cucharas, provocando el movimiento de giro de la turbina.
Energía Solar
Energía radiante producida en el Sol como resultado de reacciones nucleares de fusión . Llega a la Tierra a través del espacio en cuantos de energía llamados fotones, que interactúan con la atmósfera y la superficie terrestres. La intensidad de la radiación solar en el borde exterior de la atmósfera, si se considera que la Tierra está a su distancia promedio del Sol, se llama constante solar, y su valor medio es 1,37 × 106 erg/s/cm2, o unas 2 cal/min/cm2. Sin embargo, esta cantidad no es constante, ya que parece ser que varía un 0,2% en un periodo de 30 años. La intensidad de energía real disponible en la superficie terrestre es menor que la constante solar debido a la absorción y a la dispersión de la radiación que origina la interacción de los fotones con la atmósfera.

La intensidad de energía solar disponible en un punto determinado de la Tierra depende, de forma complicada pero predecible, del día del año, de la hora y de la latitud. Además, la cantidad de energía solar que puede recogerse depende de la orientación del dispositivo receptor.
Energía Solar Térmica
Un sistema de aprovechamiento de la energía solar muy extendido es el térmico. El medio para conseguir este aporte de temperatura se hace por medio de colectores.
El colector es una superficie, que expuesta a la radiación solar, permite absorber su calor y transmitirlo a un fluido. Existen tres técnicas diferentes entre sí en función de la temperatura que puede alcanzar la superficie captadora. De esta manera, los podemos clasificar como:
Baja temperatura, captación directa, la temperatura del fluido es por debajo del punto de ebullición .
Media temperatura, captación de bajo índice de concentración, la temperatura del fluido es más elevada de 100ºC .
Alta temperatura, captación de alto índice de concentración, la temperatura del fluido es más elevada de 300ºC .
Energía Solar Fotovoltática
El sistema de aprovechamiento de la energía del Sol para producir energía eléctrica se denomina conversión fotovoltaica.
Las células solares están fabricadas de unos materiales con unas propiedades específicas, denominados semiconductores.
Para entender el funcionamiento de una célula solar, debemos de entender las propiedades de estos semiconductores.
Propiedades de los semiconductores.
Los electrones que se encuentran orbitando al rededor del núcleo atómico no pueden tener cualquier energía, solamente unos valores determinados, que son denominados, niveles energéticos, a los que se pone nombre: 1s, 2s, 2p, 3s, 3p.
Las propiedades químicas de los elementos están determinadas por el número de electrones en su última capa y por electrones que faltan para completarla. En el silicio, material que se usa para la

construcción de una célula solar, en su última capa, posee cuatro electrones y faltan otros cuatro para completarla.
Cuando los átomos de silicio se unen a otros, comparten los electrones de las últimas capas con la de los átomos vecinos, formando lo que se denomina enlace covalente. Estas agrupaciones dan lugar a un sólido de estructura cristalina.
De la forma, que los electrones de un átomo no pueden tener cualquier energía, los electrones de un cristal tampoco pueden tomar cualquier energía.
Teniendo en cuenta que en el átomo sus propiedades se determinan en la última capa, ahora son agrupaciones de capas, llamadas bandas de energía, y que definen las propiedades electrónicas de un cristal.
Las dos últimas capas ocupadas por electrones reciben el nombre de banda de conducción y banda de valencia. Estas están separadas por una energía denominada gap.
Para poder entender esto describiremos los tipos de materiales existentes, eléctricamente hablando:
Conductores, disponen de unos electrones de valencia poco ligados al núcleo y que pueden moverse con facilidad dentro de la red cristalina respondiendo a un estímulo externo.
Semiconductores, sus electrones de valencia están más ligados a sus núcleos que los conductores, pero basta suministrar una pequeña cantidad de energía para que se comporten igual que estos.
Aislantes, los electrones de valencia están fuertemente ligados al núcleo y la energía a suministrar para poder desprenderse del átomo sería excesivamente grande.
Llegando a este punto, podemos decir que a cierta temperatura, algunos electrones tendrán energía suficiente para desligarse de los átomos, a estos electrones libres se les denomina "electrones" y se les asocia con los niveles energéticos de la banda de conducción.
A los enlaces que han dejado vacíos se les denomina "huecos"; para entender mejor este racionamiento diremos que los "huecos" se comportan de la misma forma que partículas con carga positiva.
Si pusiéramos un cristal de estas características, lo único que conseguiríamos sería calentar el cristal, ya que los electrones se moverían dentro del propio cristal, se generarían pares electron-hueco, que constan de un electrón que se mueve y deja un hueco, a ese hueco irá otro electrón próximo, generando otro hueco y así sucesivamente.
Para generar una corriente eléctrica hace falta un campo magnético, que se consigue con la unión de dos cristales semiconductores, uno de tipo "p" y otro de tipo "n".
Estos semiconductores se obtienen con un cristal semiconductor muy puro, introduciéndoles impurezas (dopado).
Una de las regiones se dopa con fósforo, que tiene cinco electrones de valencia, uno más que el silicio, de forma que esta región dopada muestra una afinidad por los electrones mayor que el silicio puro. A esta región se le denomina de tipo n.
La otra región de dopa con boro, que tiene tres electrones de valencia, uno menos que el silicio, de forma que esta región muestra una afinidad por los electrones inferior que el silicio puro. A esta región se le denomina de tipo p.

De esta forma, teniendo un cristal semiconductor de silicio formado por una región de tipo p y otra región de tipo n, se consigue una diferencia de potencial que hace que los electrones tengan menos energía en la zona n que en la zona p. Por esta razón los electrones son enviados a la zona n y los huecos a la zona p.
Cuando inciden fotones sobre este tipo de semiconductor, unión p-n, es cuando entonces se rompen algunos enlaces, generándose de esta forma pares electrón-hueco.
Las células solares, para poder suministrar energía al exterior, van provistas de unos dedos o mallas de metalización frontal, que consisten en partes metálicas por la que circula al exterior la corriente eléctrica generada.
Si esta generación se produce a una distancia de la unión menor que lo que se denomina longitud de difusión, estos pares serán separados por el fuerte campo eléctrico que existe en la unión, moviéndose el electrón hacia la zona n y el hueco hacia la zona p. De esta forma se da una corriente de la zona n a la zona p.
Si estos electrones consiguen ser recolectados por la malla de metalización, obtendremos energía eléctrica
Si la longitud de difusión es muy corta, el par electrón-hueco, se recombinará, lo cuál dará origen a calor.
Por supuesto esto siempre que la célula esté iluminada.
De todas formas no todos los fotones incidentes generan electricidad, hay factores que hacen que existan pérdidas en esta generación.
Energía de fotones incidentes, hay veces que los fotones incidentes no disponen de la energía necesaria para romper un enlace covalente y crear un par electrón-hueco, y otras, el fotón tiene demasiada energía, lo cual se disipa en forma de calor.
Recombinación, es el hecho de que los electrones liberados ocupen un hueco próximo a ellos.
Reflexión, parte de la radiación incidente en la célula es reflejada. Malla de metalización, estos contactos eléctricos en el exterior de la célula, disminuye la
superficie de captación. Resistencia serie, es el efecto Joule producido por el paso de electrones a través del silicio,
la malla de metalización y resistencia de los contactos de conexión eléctricas al circuito exterior.
Resistencia paralelo, tiene origen en las imperfecciones de la unión p-n, creando fugas de corriente.
Estas células conexionadas entre sí, y montadas en un módulo o panel es lo que llamamos panel solar. Cuyas características electricas vienen determinadas por el numero y forma de conexión de las células.
Conexión serie, conexionadas de forma que el lado p sea conectado con el lado n de otra célula, así sucesivamente, quedando cada extremo con un lado n y otro p.
Las tensiones generadas de cada célula se suman, la corriente es el valor de una célula.
Conexión paralelo, conexionados todos los lados de tipo p, por un lado, y los de tipo n por otro.

La tensión generada es la de una célula y la corriente es la suma de todas.
Conexión mixta, es la conexión en serie y en paralelo de las células.
Donde la tensión generada es la suma de las tensiones de células en serie y la corriente es la suma de todas las células en paralelo.
Itotal = I x número de celulas en paralelo
Vtotal = V x número de células en serie
Existen varios tipos de paneles fotovoltaicos, que se diferencian bien por su tecnología de fabricación de células o por su aplicación.
Silicio monocristalino Silicio policristalino Silicio amorfo Policristalinos de lámina delgada Paneles para el espacio Sulfuro de cadmio y sulfuro de cobre Teluro de cadmio Seleniuro de cobre e indio Arseniuro de galio o de concentración Bifaciales
Energía Geotérmica
Nuestro planeta guarda una enorme cantidad de energía en su interior. Un volcán o un geíser es una buena muestra de ello.
Son varias las teorías que tratan de explicar las elevadas temperaturas del interior de la Tierra. Unas sostienen que se debe a las enormes presiones existentes bajo la corteza terrestre; otras suponen que tienen origen en determinados procesos radiativos internos; por último, hay una teoría que lo atribuye a la materia incandescente que formó nuestro planeta.
Diversos estudios científicos realizados en distintos puntos de la superficie terrestre han demostrado que, por término medio, la temperatura interior de la Tierra aumenta 3ºC cada 100m. de profundidad.
Este aumento de temperatura por unidad de profundidad es denominado gradiente geotérmico.
Se supone que variará cuando alcancen grandes profundidades, ya que en el centro de la Tierra se superarían los 20.000ºC, cuando en realidad se ha calculado que es, aproximadamente, de 6.000ºC.
La forma más generalizada de explotarla, a excepción de fuentes y baños termales, consiste en perforar dos pozos, uno de extracción y otro de inyección.
En el caso de que la zona esté atravesada por un acuífero se extrae el agua caliente o el vapor, este se utiliza en redes de calefacción y se vuelve a inyectar, en el otro caso se utiliza en turbinas de generación de electricidad.
En el caso de no disponer de un acuífero, se suele proceder a la fragmentación de las rocas calientes y a la inyección de algún fluido.

Es difícil el aprovechamiento de esta energía térmica, ocasionado por el bajo flujo de calor, debido a la baja conductividad de los materiales que la constituyen; pero existen puntos en el planeta que se producen anomalías geotérmicas, dando lugar a gradientes de temperatura de entre 100 y 200ºC por kilómetro, siendo estos puntos aptos para el aprovechamiento de esta energía.
Tipos:
Hidrotérmicos, tienen en su interior de forma natural el fluido caloportador, generalmente agua en estado líquido o en vapor, dependiendo de la presión y temperatura. Suelen encontrarse en profundidades comprendidas entre 1 y 10 km.
Geopresurizados, son similares a los hidrotérmicos pero a una mayor profundidad,
encontrándose el fluido caloportador a una mayor presión, unos 1000 bares y entre 100 y 200ºC, con un alto grado de salinidad, generalmente acompañados de bolsas de gas y minerales disueltos.
De roca caliente, son formaciones rocosas impermeables y una temperatura entre 100 y
300ºC, próximas a bolsas magmáticas. Energía Eólica
La fuente de energía eólica es el viento, o mejor dicho, la energía mecánica que, en forma de energía cinética transporta el aire en movimiento. El viento es originado por el desigual calentamiento de la superficie de nuestro planeta, originando movimientos convectivos de la masa atmosférica.
La Tierra recibe una gran cantidad de energía procedente del Sol. Esta energía, en lugares favorables, puede ser del orden de 2.000 Kwh/m2 anuales. El 2 por ciento de ella se transforma en energía eólica con un valor capaz de dar una potencia de 10E+11 Gigavatios.En la antigüedad no se conocían estos datos, pero lo que sí es cierto, es que intuitivamente conocían el gran potencial de esta energía.
Las formas de mayor utilización son las de producir energía eléctrica y mecánica, bien sea para autoabastecimiento de electricidad o bombeo de agua. Siendo un aerogenerador los que accionan un generador eléctrico y un aeromotor los que accionan dispositivos, para realizar un trabajo mecánico.
Partes de un aerogenerador:

Cimientos, generalmente constituidos por hormigón en tierra, sobre el cual se atornilla la torre del aerogenerador.
Torre, fijada al suelo por los cimientos, proporciona la altura suficiente para evitar turbulencias y superar obstáculos cercanos; la torre y los cimientos son los encargados de transmitir las cargas al suelo.
Chasis, es el soporte donde se encuentra el generador, sistema de frenado, sistema de orientación, equipos auxiliares (hidráulico), caja de cambio, etc. Protege a estos equipos del ambiente y sirve, a su vez, de aislante acústico.
El buje, pieza metálica de fundición que conecta las palas al eje de transmisión. Las palas, cuya misión es la de absorber energía del viento; el rendimiento del
aerogenerador depende de la geometría de las palas, interviniendo varios factores:o Longitudo Perfilo Calajeo Anchura
Sistemas de un aerogenerador:
Orientación, mantiene el rotor cara al viento, minimizando los cambios de dirección del rotor con los cambios de dirección de viento; Estos cambios de dirección provocan pérdidas de rendimiento y genera grandes esfuerzos con los cambios de velocidad.
Regulación, controla la velocidad del rotor y el par motor en el eje del rotor, evitando fluctuaciones producidas por la velocidad del viento.
Transmisión, utilizados para aumentar la velocidad de giro del rotor, para poder accionar un generador de corriente eléctrica, es un multiplicador, colocado entre el rotor y el generador.
Generador, para la producción de corriente continua (DC) dinamo y para la producción de corriente alterna (AC) alternador, este puede ser síncrono o asíncrono.
Energía del Mar
Los mares y los océanos son inmensos colectores solares, de los cuales se puede extraer energía de orígenes diversos.
La radiación solar incidente sobre los océanos, en determinadas condiciones atmosféricas, da lugar a los gradientes térmicos oceánicos (diferencia de temperaturas) a bajas latitudes y profundidades menores de 1000 metros.

La iteración de los vientos y las aguas son responsables del oleaje y de las corrientes marinas.
La influencia gravitacional de los cuerpos celestes sobre las masas oceánicas provoca mareas.
Energía de las mareas:
La energía estimada que se disipa por las mareas es del orden de 22000 TWh. De esta energía se considera recuperable una cantidad que ronda los 200 TWh.
El obstáculo principal para la explotación de esta fuente es el económico. Los costes de inversión tienden a ser altos con respecto al rendimiento, debido a las bajas y variadas cargas hidráulicas disponibles. Estas bajas cargas exigen la utilización de grandes equipos para manejar las enormes cantidades de agua puestas en movimiento. Por ello, esta fuente de energía es sólo aprovechable en caso de mareas altas y en lugares en los que el cierre no suponga construcciones demasiado costosas.
La limitación para la construcción de estas centrales, no solamente se centra en el mayor coste de la energía producida, si no, en el impacto ambiental que generan.
La mayor central mareomotriz se encuentra en el estuario del Rance (Francia). En nuestro país hay una central mareomotriz en Península de Valdés ( Chubut ) .
Energía térmica oceánica
La explotación de las diferencias de temperatura de los océanos ha sido propuesta multitud de veces, desde que d’Arsonval lo insinuara en el año 1881, pero el más conocido pionero de esta técnica fue el científico francés George Claudi, que invirtió toda su fortuna, obtenida por la invención del tubo de neón, en una central de conversión térmica.
La conversión de energía térmica oceánica es un método de convertir en energía útil la diferencia de temperatura entre el agua de la superficie y el agua que se encuentra a 100 m de profundidad. En las zonas tropicales esta diferencia varía entre 20 y 24 ºC. Para el aprovechamiento es suficiente una diferencia de 20ºC.
Las ventajas de esta fuente de energía se asocian a que es un salto térmico permanente y benigno desde el punto de vista medioambiental. Puede tener ventajas secundarias, tales como alimentos y agua potable, debido a que el agua fría profunda es rica en sustancias nutritivas y sin agentes patógenos.
Las posibilidades de esta técnica se han potenciado debido a la transferencia de tecnología asociada a las explotaciones petrolíferas fuera de costa. El desarrollo tecnológico de instalación de plataformas profundas, la utilización de materiales compuestos y nuevas técnicas de unión harán posible el diseño de una plataforma, pero el máximo inconveniente es el económico.
Existen dos sistemas para el aprovechamiento de esta fuente de energía:

El primero consiste en utilizar directamente el agua de mar en un circuito abierto, evaporando el agua a baja presión y así mover una turbina. El departamento de energía americano (DOE) está construyendo un prototipo de 165 kW en las islas Hawaii, con él se pretende alcanzar la experiencia necesaria para construir plantas de 2 a 15 MW.
El segundo consiste en emplear un circuito cerrado y un fluido de baja temperatura de ebullición (amoniaco, freón, propano)que se evaporan en contacto con el agua caliente de la superficie. Este vapor mueve un turbogenerador, se condensa con agua fría de las profundidades y el fluido queda dispuesto de nuevo para su evaporación.
El rendimiento de este sistema es su bajo rendimiento, sobre un 7%, esto es debido a la baja temperatura del foco caliente y la poca diferencia de temperatura entre el foco frío y caliente. Además es preciso realizar un coste extra de energía, empleado para el bombeo de agua fría de las profundidades para el condensado de los fluidos.
Energía de las olas
Las olas del mar son un derivado terciario de la energía solar. El calentamiento de la superficie terrestre genera viento, y el viento genera las olas. Únicamente el 0.01% del flujo de la energía solar se transforma en energía de las olas. Una de las propiedades características de las olas es su capacidad de desplazarse a grandes distancias sin apenas pérdida de energía. Por ello, la energía generada en cualquier parte del océano acaba en el borde continental. De este modo la energía de las olas se concentra en las costas, que totalizan 336000 km de longitud. La densidad media de energía es del orden de 8 kW/m de costa. En comparación, las densidades de la energía solar son del orden de 300 W/m2. Por tanto, la densidad de energía de las olas es, en un orden de magnitud, mayor que la que los procesos que la generan. Las distribuciones geográficas y temporales de los recursos energéticos de las olas están controladas por los sistemas de viento que las generan (tormentas, alisios, monzones).
La densidad de energía disponible varía desde las más altas del mundo, entre 50-60 kW/m en Nueva Zelanda, hasta el valor medio de 8 kW/m.
Los diseños actuales de mayor potencia se hallan a 1 Mwe de media, aunque en estado de desarrollo.
La tecnología de conversión de movimiento oscilatorio de las olas en energía eléctrica se fundamenta en que la ola incidente crea un movimiento relativo entre un absorbedor y un punto de reacción que impulsa un fluido a través del generador.
La potencia instalada en operación en el mundo apenas llega al Mwe. La mayor parte de las instalaciones lo son de tierra. Los costes fuera de la costa son considerablemente mayores. En el momento actual, la potencia instalada de los diseños más modernos varía entre 1 y 2 MW. Pero todos los diseños deben considerarse experimentales.
De los sistemas propuestos, para aprovechar la energía de las olas, se puede hacer una clasificación, los que se fijan a la plataforma continental y los flotantes, que se instalan en el mar.

Uno de los primeros fue el convertidor noruego Kvaerner, cuyo primer prototipo se construyó en Bergen en 1985. Consistente en un tubo hueco de hormigón, de diez metros de largo, dispuesto verticalmente en el hueco de un acantilado. Las olas penetran por la parte inferior del cilindro y desplazan hacia arriba la columna de aire, lo que impulsa una turbina instalada en el extremo superior del tubo. Esta central tiene una potencia de 500 kW y abastece a una aldea de cincuenta casas.
El pato de Salter, que consiste en un flotador alargado cuya sección tiene forma de pato. La parte más estrecha del flotador se enfrenta a la ola con el fin de absorber su movimiento lo mejor posible. Los flotadores giran bajo la acción de las olas alrededor de un eje cuyo movimiento de rotación acciona una bomba de aceite que se encarga de mover una turbina.
La dificultad que presenta este sistema es la generación de electricidad con los lentos movimientos que se producen.
Balsa de Cockerell, que consta de un conjunto de plataformas articuladas que reciben el impacto de las crestas de las olas. Las balsas ascienden y descienden impulsando un fluido hasta un motor que mueve un generador por medio de un sistema hidráulico instalado en cada articulación.
Rectificador de Russell, formado por módulos que se instalan en el fondo del mar, paralelos al avance de las olas. Cada módulo consta de dos cajas rectangulares, una encima de la otra. El agua pasa de la superior a la inferior a través de una turbina.
Boya de Nasuda, consistente en un dispositivo flotante donde el movimiento de las olas se aprovecha para aspirar e impulsar aire a través de una turbina de baja presión que mueve un generador de electricidad.
Biomasa y R.S.U.
La más amplia definición de BIOMASA sería considerar como tal a toda la materia orgánica de origen vegetal o animal, incluyendo los materiales procedentes de su transformación natural o artificial. Clasificándolo de la siguiente forma:
Biomasa natural, es la que se produce en la naturaleza sin la intervención humana.

Biomasa residual, que es la que genera cualquier actividad humana, principalmente en los procesos agrícolas, ganaderos y los del propio hombre, tal como, basuras y aguas residuales.
Biomasa producida, que es la cultivada con el propósito de obtener biomasa transformable en combustible, en vez de producir alimentos, como la caña de azúcar en Brasil, orientada a la producción de etanol para carburante.
Desde el punto de vista energético, la biomasa se puede aprovechar de dos maneras; quemándola para producir calor o transformándola en combustible para su mejor transporte y almacenamiento la naturaleza de la biomasa es muy variada, ya que depende de la propia fuente, pudiendo ser animal o vegetal, pero generalmente se puede decir que se compone de hidratos de carbono, lípidos y prótidos. Siendo la biomasa vegetal la que se compone mayoritariamente de hidratos de carbono y la animal de lípidos y prótidos.
La utilización con fines energéticos de la biomasa requiere de su adecuación para utilizarla en los sistemas convencionales.
Estos procesos pueden ser:
Físicos, son procesos que actúan físicamente sobre la biomasa y están asociados a las fases primarias de transformación, dentro de lo que puede denominarse fase de acondicionamiento, como, triturado, astillado, compactado e incluso secado.
Químicos, son los procesos relacionados con la digestión química, generalmente mediante hidrólisis pirólisis y gasificación.
Biológicos, son los llevados a cabo por la acción directa de microorganismos o de sus enzimas, generalmente llamado fermentación. Son procesos relacionados con la producción de ácidos orgánicos, alcoholes, cetonas y polímeros.
Termoquímicos, están basados en la transformación química de la biomasa, al someterla a altas temperaturas (300ºC - 1500ºC). Cuando se calienta la biomasa se produce un proceso de secado y evaporación de sus componentes volátiles, seguido de reacciones de crakeo o descomposición de sus moléculas, seguidas por reacciones en la que los productos resultantes de la primera fase reaccionan entre sí y con los componentes de la atmósfera en la que tenga lugar la reacción, de esta forma se consiguen los productos finales.
Según el control de las condiciones del proceso se consiguen productos finales diferentes, lo que da lugar a los tres procesos principales de la conversión termoquímica de la biomasa:
Combustión: Se produce en una atmósfera oxidante, de aire u oxígeno, obteniendo cuando es completa, dióxido de carbono, agua y sales minerales (cenizas), obteniendo calor en forma de gases calientes.

Gasificación: Es una combustión incompleta de la biomasa a una temperatura de entre 600ºC a 1500ºC en una atmósfera pobre de oxígeno, en la que la cantidad disponible de este compuesto está por debajo del punto estequiométrico, es decir, el mínimo necesario para que se produzca la reacción de combustión. En este caso se obtiene principalmente un gas combustible formado por monóxido y dióxido de carbono, hidrógeno y metano.
Pirólisis: Es el proceso en la descomposición térmica de la biomasa en ausencia total de oxígeno.
En procesos lentos y temperaturas de 300ºC a 500ºC el producto obtenido es carbón vegetal, mientras que en procesos rápidos (segundos) y temperaturas entre 800ºC a 1200ºC se obtienen mezclas de compuestos orgánicos de aspectos aceitosos y de bajo pH, denominados aceites de pirólisis.
Pudiéndose obtener combustibles:
Sólidos, Leña, astillas, carbón vegetal Líquidos, biocarburantes, aceites, aldehidos, alcoholes, cetonas, ácidos orgánicos...
Gaseosos, biogas, hidrógeno .
2 - ¿ Qué es la bioenergía ?
Energía obtenida por transformación química de la biomasa .