Movimiento relativo
16
INSTITUTO UNIVERSITARIO POLITÉCNICO “SANTIAGO MARIÑO” ESCUELA DE ING. INDUSTRIAL MOVIMIENTO RELATIVO Bachiller: Jessica Parra C.I.:24696113 Profe: Julián Carneiro
-
Upload
jessicaparra15 -
Category
Documents
-
view
5 -
download
0
description
Movimiento relativo
Transcript of Movimiento relativo
INSTITUTO UNIVERSITARIO POLITCNICOSANTIAGO MARIOESCUELA DE ING. INDUSTRIAL
MOVIMIENTO RELATIVO
Bachiller:Jessica Parra C.I.:24696113Profe: Julin Carneiro
El movimiento siempre es un concepto relativo porque debe referirse a un sistema de referencia o referencial particular escogido por el observador. Puesto que diferentes observadores pueden utilizar referenciales distintos, es importante relacionar las observaciones realizadas por aquellos.Una partcula se encuentra en movimiento en un referencial si su posicin con respecto a l cambia en el transcurso del tiempo; en caso contrario, la partcula est en reposo en dicho referencial. De estas definiciones, vemos que tanto el concepto de movimiento como el de reposo son relativos. As, el pasajero que est sentado en un vagn de ferrocarril se encuentra en reposo con respecto al vagn; pero como el tren se mueve con respecto a la Tierra, el pasajero se encuentra en movimiento con respecto a los rboles que observa desde el tren. A su vez, esos rboles estn en reposo respecto de la Tierra, pero en movimiento respecto del pasajero del tren.El Movimiento relativo es el cambiode posicin respecto de unsistemade referencia que a su vez se mueve respecto a otro sistema de referencia. No se puede hablar de un sistema de referencia absoluto ya que no se conoce un punto fijo en el espacio que pueda ser elegido como origen de dicho sistema. Por tanto, elmovimientotienecarcterrelativo.
Ejemplo 1:Un ro fluye hacia el este convelocidaddec=3 m/s. Un bote se dirige hacia el este (aguas abajo) con velocidad relativa alaguadev=4 m/s. Calcular la velocidad del bote respecto detierracuando el bote se dirige hacia el este (ro abajo) y cuando se dirige hacia el oeste (ro arriba). Calcular eltiempoque tarda el bote en desplazarsed=100 m hasta el punto P y regresar de nuevo al punto de partida O. Cuando el bote navega aguas abajo la velocidad del bote respecto de tierra esc+v, es decir de 7 m/s. Cuando el bote navega en sentido contrario a la corriente la velocidad del bote respecto de tierra esc-v, es decir de -1 m/s.
El tiempo que tarda el barquero en hacer el viaje de ida est1=d/(v+c) El tiempo que tarda en hacer el viaje de vuelta est2=d/(v-c)El tiempo total esCon losdatosdel problemat= 800/7 = 114.3 s.
A efectos prcticos, podemos distinguir dos modalidades de movimiento relativo:Movimiento relativo entre dos partculas en un mismo referencial.Movimiento relativo de una partcula en dos referenciales diferentes en movimiento relativo entre s. Movimiento relativo entre dos partculas en un mismo referencial: Consideremos dos partculas,AyB, que se mueven en el espacio y seanysus vectores de posicin con respecto al origen O de un referencial dado. Las velocidades de A y B medidas en ese referencial sern
(1)Los vectores de posicin (relativa) de la partculaBcon respecto a laAy de la Acon respecto a laBestn definidos por(2)Y las velocidades (relativas) deBcon respecto aAy deAcon respecto aB son(3)Puesto que, tambin resulta que, de modo que lasvelocidades relativasde B con respecto a A y de A con respecto a B son iguales y opuestas.Efectuando las derivadas (3), resulta(4)O sea que(5)De modo que obtendremos la velocidad relativa entre las dos partculas restando vectorialmente sus velocidades con respecto a un mismo referencial.Derivando de nuevo las expresiones (5) tenemos para las aceleraciones relativas(6)Los primeros miembros de (6) son las aceleraciones relativas de B con respecto a A y de A con respecto a B. Los otros trminos son las aceleraciones de A y de B con respecto a un mismo observador O xyz.Tenemos(7)Siguindose para las aceleraciones relativas la misma regla que para las velocidades.
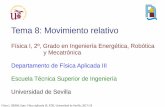
Movimiento relativo entre dos partculas enmovimiento respecto a un mismo referencial xyz Movimiento relativo de una partcula en dos referencialesEn este caso, elmovimiento relativohace referencia al que presenta una partcula con respecto a un sistema de referencia (xyz), llamadoreferencial relativoo mvil por estar en movimiento con respecto a otro sistema de referencia (XYZ) considerado como referencial absolutoo fijo.El movimiento de un referencial respecto al otro puede ser una traslacin, unarotacino una combinacin de ambas (movimiento rototraslatorio).
Sistema de referencia fijo o absoluto (XYZ) y sistema de referencia mvil o relativo (xyz) en movimiento general (rototraslatorio) respecto al referencial absoluto.
Velocidad del movimiento relativoLa velocidadde una partcula en unreferencial fijoo absoluto y su velocidaden unreferencial mvilo relativo estn relacionadas mediante esta expresin:(1)Siendo:La velocidad de la partcula en el referencial fijo (velocidad absoluta).La velocidad de la partcula en el referencial mvil (velocidad relativa),La velocidad del origen del referencial mvil en el referencial fijo (arrastre de traslacin),La velocidad angular del referencial mvil respecto del referencial fijo (velocidad angular de arrastre),La velocidad dearrastre de rotacin.Los dos ltimos trminos representan lavelocidad de arrastretotal, de modo que podemos escribir
Que coincide con la velocidad correspondiente un punto de unslido rgido en movimiento.Podemos expresar la velocidad de la partcula en el referencial fijo en la forma
Aceleracin del movimiento relativo
La aceleracinde una partcula en unreferencial fijoo absoluto y su aceleracinen unreferencial mvilo relativo estn relacionadas mediante la expresin:(1)Siendo:La aceleracin de la partcula en el referencial fijo (aceleracin absoluta).La aceleracin de la partcula en el referencial mvil (aceleracin relativa),La velocidad de la partcula en el referencial mvil (velocidad relativa),La aceleracin del origen del referencial mvil en el referencial fijo (arrastre de traslacin),La aceleracin tangencial (arrastre de rotacin),La aceleracin normal o centrpeta (arrastre de rotacin),La aceleracin complementaria oaceleracin de Coriolis.Si la partcula se encuentra en reposo en el referencial mvil, esto es, siy, su aceleracin en el referencial fijo es laaceleracin de arrastre, que viene dada por
Que coincide con la aceleracin correspondiente un punto de unslido rgido en movimiento.Podemos expresar la aceleracin de la partcula en el referencial fijo en la forma
Traslacin solamenteLa aceleracin de una partcula en un referencial fijo o absolutoy en un referencial mvil o relativo, estn relacionadas mediante la expresin:
Solo rotacinLa aceleracin de una partcula en un referencial fijo o absolutoy en un referencial mvil o relativo, estn relacionadas mediante la expresin:
Movimiento Relativo: es el movimiento del sistema rgido con respecto a la terna de arrastre como si sta estuviese fija.
Movimiento de Arrastre: Es el movimiento del slido como si estuviera solidariamente unido a la terna mvil y sta lo "arrastrase" en su movimiento.
Movimiento Absoluto: Es el movimiento del sistema rgido respecto de la terna absoluta como consecuencia de la simultaneidad de los dos movimientos anteriores.
El movimiento relativo corresponde al movimiento de un cuerpo con respecto a otro que se mueve:
Ejemplo 1.- Si te mueves hacia adelante dentro de un tren que se est moviendo, tu velocidad con respecto al suelo es la suma de la velocidad del tren ms tu velocidad.Ejemplo 2.- Si subes en una escalera mecnica que a su vez est subiendo, tu velocidad con respecto al suelo ser la velocidad con que sube la escalera ms la velocidad relativa con que subes con respecto a la escalera.
Movimiento relativo de rotacin uniformeCuando un cuerpo se mueve sobre la superficie de la Tierra est sometido a dos fuerzas lafuerza centrfugayla fuerza de Coriolis,La fuerza de Coriolis es la responsable de la rotacin del plano del pndulo de Foucault, la circulacin del aire alrededor de los centros de baja o alta presin, la desviacin de la trayectoria de proyectiles de largo alcance, la rotacin del agua cuando sale por el desage de la baera, etc.La fuerza centrfuga es responsable del cambio en el mdulo y en la direccin de la aceleracin de la gravedad a distintas latitudes.Las fuerzas reales como la fuerza que ejerce un muelle, la fuerza de atraccin gravitatoria, las fuerzas elctricas o magnticas son las que describen las interacciones entre los cuerpos. Las fuerzas de inercia solamente se observan en sistemas de referencia acelerados, para distinguirlas de las fuerzas reales se denominan tambin fuerzas ficticias o pseudofuerzas.La introduccin de este tipo de fuerzas junto con las reales facilita la resolucin de los problemas de Mecnica en los sistemas de referencia en movimiento relativo de rotacin uniforme como la Tierra.Las frmulas que relacionan la velocidadvy de la aceleracinamedidas en el sistema no inercial con la velocidadvy aceleracinamedidas en el sistema inercial son las siguientes
Sistemas de referenciaEl movimiento de una partcula puede ser observado desde distintossistemas de referencia. Un sistema de referencia est constituido por un origen y tres ejes perpendiculares entre s y que pasan por aqul. Los sistemas de referencia pueden estar en reposo o en movimiento. Existen dos tipos de sistemas de referencia:
Sistema de referencia inercial:es aqul que est en reposo o se mueve con velocidad constante (es decir,no tiene aceleracin). Sistema de referencia no inercial:es aqul quetiene aceleracin.
Sistemas de referencia. El observadorOest en reposo.O1yO2son inerciales, yO3es no inercial.
Los vectores posicin, velocidad y aceleracin de una partcula tendrn en general distinto valor dependiendo del sistema de referencia desde el que estn calculados.
Es interesante disponer de ecuaciones que relacionen los valores de dichos vectores calculados desde distintos sistemas de referencia, porque de este modo, una vez calculados con respecto a uno de ellos y conociendo el movimiento relativo de ambos sistemas de referencia, podremos obtener los vectores medidos por el segundo.
En esta seccin vamos a obtener dichas ecuaciones para varias situaciones concretas: cuando los dos sistemas de referencia se encuentran en movimiento relativo de traslacin (uniforme y uniformemente acelerado) y cuando se encuentran en movimiento relativo de rotacin uniforme.
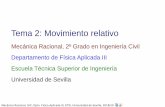
Movimiento relativo de traslacin uniformeLastransformaciones de Galileoson las ecuaciones que relacionan los vectores de posicin, velocidad y aceleracin medidos desde dos sistemas de referencia diferentes, cuando uno de ellos est en reposo y el otro se mueve con velocidad constante con respecto al primero. Es importante resaltar que en esta situacin ambos sistemas de referencia son inerciales.
Movimiento relativo de traslacin uniforme.OyO'son dos sistemas de referencia inerciales, yO'se mueve con velocidadVconstante con respecto a O.
En la figura anterior est representada la trayectoria de una partcula (en azul) y los dos sistemas de referencia junto con los vectores unitarios que definen los sentidos positivos de sus ejes. Como puede observarse,Vector de posicin
Derivando,Vector velocidad
DondeVes la velocidad deO'con respecto aO.Derivando de nuevo,Vector aceleracin
Como se observa de la ltima ecuacin,todos los sistemas de referencia inerciales miden la misma aceleracin.
Movimiento relativo de traslacin uniformemente aceleradoConsideremos ahora una situacin semejante a la anterior, pero en la que el sistema que se traslada lo hace con una aceleracin constanteAcon respecto al que permanece en reposo.Segn las relaciones del movimientouniformemente aceleradola distancia recorrida porOen un tiempotes ahora:
De forma anloga al caso anterior obtenemos las siguientes relaciones:Vector de posicin
DondeAes la aceleracin deO'con respecto aO.Derivando,Vector velocidad
Derivando de nuevo,Vector aceleracin
Es decir, las aceleraciones mediadas por ambos sistemas no coinciden.
Un sistema que se encuentra en movimiento relativo acelerado con respecto a otro es unsistema de referencia no inercial.
Un sistema de referencia no inercial se denomina as porque en l no se cumple la ley de inerciao Primera Ley de Newton.
La primera ley de Newton, conocida tambin como Ley de inercia, nos dice que si sobre un cuerpo no acta ningn otro, este permanecer indefinidamente movindose en lnea recta con velocidad constante (incluido el estado de reposo, que equivale a velocidad cero).Como sabemos, el movimiento es relativo, es decir, depende de cual sea el observador que describa el movimiento. As, para un pasajero de un tren, el interventor viene caminando lentamente por el pasillo del tren, mientras que para alguien que ve pasar el tren desde el andn de una estacin, el interventor se est moviendo a una gran velocidad. Se necesita, por tanto, unsistema de referenciaal cual referir el movimiento. La primera ley de Newton sirve para definir un tipo especial de sistemas de referencia conocidos comoSistemas de referencia inerciales, que son aquellos sistemas de referencia desde los que se observa que un cuerpo sobre el que no acta ninguna fuerza neta se mueve con velocidad constante.En realidad, es imposible encontrar un sistema de referencia inercial, puesto que siempre hay algn tipo de fuerzas actuando sobre los cuerpos, pero siempre es posible encontrar un sistema de referencia en el que el problema que estemos estudiando se pueda tratar como si estuvisemos en un sistema inercial. En muchos casos, suponer a un observador fijo en la Tierra es una buena aproximacin de sistema inercial.