Navegación Aérea - Tema 5: Sistema de navegación por ... · GPS: Otros conceptos Fundamentos b...
47
Navegaci´on por posicionamiento GNSS: Navegaci´on por sat´ elite GPS: Otros conceptos Navegaci´onA´ erea Tema 5: Sistema de navegaci´ on por posicionamiento. Navegaci´ on por sat´ elite.
Transcript of Navegación Aérea - Tema 5: Sistema de navegación por ... · GPS: Otros conceptos Fundamentos b...

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Navegacion AereaTema 5: Sistema de navegacion por posicionamiento.
Navegacion por satelite.

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Sistema de navegacion por posicionamiento.
La navegacion por posicionamiento consiste en averiguar lalocalizacion geografica con ayuda de senales o medidasexteriores.
El ejemplo mas temprano es la navegacion astronomica que yase vio en la introduccion historica. Dicho tipo de navegacionaun se emplea, especialmente para vehıculos espaciales ymisiles balısticos.
Actualmente la navegacion por posicionamiento se realizamediante radioayudas (por ejemplo VOR/DME, DME/DME),radar y/o sistemas de navegacion por satelite (GNSS).
Ademas de la posicion se puede encontrar la velocidadestudiando el efecto Doppler en las senales. Tambien puedeser posible hallar la actitud.
Veremos en detalle la navegacion DME/DME y GNSS, y suimpacto en la navegacion aerea hoy en dıa.
2 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Fundamentos basicos.
Los sistemas de posicionamiento que vamos a estudiar sebasan en la recepcion (y en el caso del DME, emision) desenales respecto a un punto de referencia cuya localizacion esconocida (una estacion, un satelite).
Estudiando el tiempo de transmision de dichas senales, seencuentra la distancia hasta el punto de referencia.
Con dicha distancia se puede construir un lugar geometrico depuntos posibles donde puede hallarse la aeronave.
Dado el suficiente numero de estaciones o satelites, sepodra hallar la posicion de la aeronave como la interseccion dedichos lugares geometricos.
La posicion relativa de los puntos de referencia influira en elerror (DOP: Dilution of Precision).
3 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
DME IDME=Distance Measurement Equipment.
El sistema requiere un emisor/receptor en laaeronave y un transponder en la estacion entierra.
El sistema en la aeronave interroga altransponder en tierra mediante una serie depares de pulsos. La estacion responde con unasecuencia identica de pulsos con un ciertoretraso especıfico (50 microsegundos).
La distancia se calcula simplemente midiendo eltiempo que tardan las senales en retornar trassu emision; a dicho tiempo se le resta 50microsegundos y se divide por 2. Dividiendo elresultado por la velocidad de la luz, se obtieneuna buena estimacion de la distancia a laestacion en tierra. 4 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
DME II
La secuencia de pares de pulsos depende del equipo del avion,por lo que un mismo equipo de tierra puede responder amultiples equipos en el aire (hasta 100–200 aeronaves).La precision tıpica de un DME esta entre 185 m (0.1 nm) y926 m. (0.5nm) 2− σ. Se pueden obtener medidas casicontinuamente (10 medidas por segundo). Tambien se obtieneuna estimacion de la velocidad (proyectada en la direccion dela estacion) mediante el efecto Doppler.Observese que la medida de distancia D es 3-D. Para obtenerla distancia sobre el terreno, dG , si la altitud Alt es conocida:D2 = d2
G + Alt2.5 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Navegacion DME/DME
Consideremos el caso de dos DMEs. En principio existira unaambiguedad que se puede resolver conocidas medidasanteriores o con una tercera estacion.
Simplifiquemos y supongamos Tierra plana y las coordenadasx , y que miden la posicion de la aeronave; las coordenadasx1, y1 y x2, y2 determinan la posicion de las estaciones.
Se mide la distancia a la primera estacion ρ1 y a la segundaestacion ρ2 (distancias sobre tierra).
Las ecuaciones que hay que resolver para hallar la posicionson:
(x − x1)2 + (y − y1)2 = ρ1, (x − x2)2 + (y − y2)2 = ρ2.
Estas ecuaciones son sencillas de resolver. Pero si lasdistancias contienen error, ¿como determinar el error final enla estimacion de posicion?
6 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Errores en navegacion DME/DME
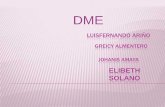
In the presence of measurement errors, the range rings used to compute theuser’s location will be in error and result in error in the computed position. The con-cept of dilution of precision is the idea that the position error that results from mea-surement errors depends on the user/foghorn relative geometry. Graphically, theseideas are illustrated in Figure 7.5. Two geometries are indicated. In Figure 7.5(a),
7.3 PVT Estimation Concepts 323
(a)
(b)
Foghorn 2
Variation in range ringdue to range errors:from foghorn 1from foghorn 2
Shaded region: Locationsusing data from withinindicated error bounds
User location
Foghorn 1
Shaded region: Locations using datafrom within indicated error bounds
Variation in range ring due torange errors:from foghorn 1from foghorn 2
Foghorn 1Foghorn 2
User location
Figure 7.5 Relative geometry and dilution of precision: (a) geometry with low DOP, and (b)geometry with high DOP.
In the presence of measurement errors, the range rings used to compute theuser’s location will be in error and result in error in the computed position. The con-cept of dilution of precision is the idea that the position error that results from mea-surement errors depends on the user/foghorn relative geometry. Graphically, theseideas are illustrated in Figure 7.5. Two geometries are indicated. In Figure 7.5(a),
7.3 PVT Estimation Concepts 323
(a)
(b)
Foghorn 2
Variation in range ringdue to range errors:from foghorn 1from foghorn 2
Shaded region: Locationsusing data from withinindicated error bounds
User location
Foghorn 1
Shaded region: Locations using datafrom within indicated error bounds
Variation in range ring due torange errors:from foghorn 1from foghorn 2
Foghorn 1Foghorn 2
User location
Figure 7.5 Relative geometry and dilution of precision: (a) geometry with low DOP, and (b)geometry with high DOP.
Los errores dependen de la posicion relativa de las estacionesDME con respecto al receptor.Si la linea que une al receptor con uno de los DME forma 90grados con la linea que une al receptor con el otro DME, lasituacion es optima, como se ve en la figura de la izquierda.Si dichas lineas forman un angulo pequeno (por ejemplo si elreceptor se encuentra aproximadamente entre las estacionesDME) la situacion es adversa, como se muestra en la figura dela derecha.
7 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
RNAVRNAV=aRea NAVigation.
La navegacion tradicional exige emplearradioayudas (tıpicamente VOR) comowaypoints generando aerovıas rıgidas queno permiten explotar el espacio aereo.
Los sistemas de navegacion actualespermiten saber la posicion de la aeronavecon precision, para cualquier ruta.
RNAV es un procedimiento de navegacion que permite disenaruna ruta arbitraria con waypoints virtuales, siempre que laruta de la aeronave se encuentre en una zona donde lossistemas de navegacion tengan la suficiente precision.Dicha precision se puede especificar, de forma que unadeterminada ruta o procedimiento RNAV solo la puedenrealizar aviones con ciertas caracterısticas y adecuadamenteequipados. Esta especificacion se denomina RNP.
8 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
RNAV/RNP
RNP=Required Navigation Performance.
Es un conjunto de estandares que especificanlos requisitos mınimos que una aeronave y susistema de navegacion deben cumplir paraoperar en un determinado espacio aereo.
RNAV/RNP: permite disenar rutas con menorseparacion que la tradicionalmente empleada, ypor tanto una explotacion eficiente del espacioaereo.
RNAV/RNP es el futuro del trafico aereo y requiere un amplioconocimiento de los sistemas de navegacion utilizados.
Ejemplificamos estos conceptos para el caso DME-DME.
9 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Navegacion RNAV DME/DME
Los sistemas DME/DME estan extendidos hoyen dıa y permiten suficiente cobertura paratodas las operaciones en ruta en Europa.Permiten cumplir los requisitos RNAV si bien sereconoce que deberıa aumentar el numero deestaciones para mejorar la precision.
Para poder realizar navegacion DME/DME losrequisitos mınimos son 2 estaciones cumpliendo:
Distancia menor de 200 nm y mayor de 1nm.Arco subtendido entre las dos estacionessituado entre 30 grados y 150 grados.
Cuantas mas estaciones esten disponibles,mayor precision se podra conseguir. Encualquier caso la precision dependera delequipo.
10 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento IRNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 10
Estimated
Flight Path
SYSTEM ACCURACY
Nominal Flight
Path
HORIZONTAL VIEW
Estimated Position
FTT
True Aircraft Flight Path
True Aircraft Position
ATT
XTT
XTT depends on FTT
Nominal Aircraft
Position
RNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 11
WAYPOINT TOLERANCE
ATT
XTT
Errores 2-D: ATT (along-track tolerance) y XTT (cross-tracktolerance).
Estos son los errores que se requieren para disenarprocedimientos RNAV. Se fija un corredor de seguridad entorno a la trayectoria que respete estos errores maximos.
Aparte de los errores procedentes del DME, otros errores quejuegan un papel son (FTT=error tecnico de vuelo) y el errorde calculo (ST=system tolerance).
11 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento II
Aunque el error depende de la posicion relativa de los DMEs yel receptor, la norma editada por EUROCONTROL considerael peor caso posible y evita complicar las formulas con lageometrıa del problema.
Segun la norma, hay que calcular:d = 1,23×
√Alt × 0,0125 + 0,25nm, con Alt en pies.
Se toma ST = 0,25nm, y el valor de FTT sera:
En ruta: FTT = 2nmAcercamiento inicial e intermedio: FTT = 1nm.Despegue, acercamiento final FTT = 0,5nm.
Si solo hay 2 DMEs multiplicar d por 1,29.
Los errores seran:
XTT =√
d2 + FTT 2 + ST 2, ATT =√
d2 + ST 2
12 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Fundamentos basicosNavegacion DME-DME y el diseno de aerovıas
Diseno de un procedimiento III
Aparte se anaden pequenos ”buffers”para aumentar laseguridad de los procedimientos.
Usando los valores de XTT y ATT se pueden disenarprocedimientos RNAV.
RNAV in Europe - Procedure Design Master Class
EUROCONTROL
Eliane Belin 19
IAWP IWP
DESIGN OF PROTECTION
AREAS
PRIMARY AREA
SECONDARY AREA
Guidance Material for the Design of Terminal Procedures for DME/DME and GNSS Area Navigation
Edition : 2.2 Released Issue Page 8
2.3.4 The procedure designer should choose the table based upon the worst casenavaid availability for the waypoint in question. In other words, how many DMEstations are within range and available for use at the lowest usable level at thewaypoint. The XTT, ATT and !AW values at that level, for the appropriatephase of flight, should then be used for all containment area calculationsassociated with that waypoint. The en-route values are provided for use onarrival legs that are more than 25 NM from the IAWP.
Altitude En-route IAWP/IWP FAWP/MAWP/DWP
(ft)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
15,000 For all altitudes 2.94 2.76 5.41
14,000 4.08 3.56 8.10 2.86 2.68 5.29
13,000 2.78 2.60 5.17
12,000 2.70 2.51 5.05
11,000 2.61 2.42 4.92
10,000 2.53 2.32 4.79 2.37 2.32 4.06
9,000 2.43 2.22 4.65 2.27 2.22 3.91
8,000 2.34 2.11 4.50 2.17 2.11 3.75
7,000 2.23 2.00 4.35 2.06 2.00 3.59
6,000 2.13 1.88 4.19 1.94 1.88 3.41
5,000 2.01 1.74 4.01 1.81 1.74 3.22
4,000 1.88 1.60 3.83 1.67 1.60 3.01
3,000 1.75 1.43 3.62 1.52 1.43 2.77
2,000 1.59 1.24 3.38 1.33 1.24 2.50
1,000 1.40 0.98 3.10 1.10 0.98 2.15
500 0.95 0.81 1.92
Table 2 - XTT, ATT and Semi-width Values (in NM) for DME/DME RNAV (Only 2 DMEs available)
Altitude En-route IAWP/IWP FAWP/MAWP/DWP
(ft)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
XTT(NM)
ATT(NM)
!AW(NM)
15,000 For all altitudes 2.37 2.15 4.55
14,000 3.40 2.67 7.10 2.31 2.08 4.47
13,000 2.25 2.02 4.38
12,000 2.19 1.95 4.29
11,000 2.13 1.88 4.19
10,000 2.06 1.80 4.10 1.87 1.80 3.31
9,000 2.00 1.73 3.99 1.80 1.73 3.20
8,000 1.92 1.64 3.89 1.72 1.64 3.08
7,000 1.85 1.56 3.78 1.63 1.56 2.95
6,000 1.77 1.46 3.66 1.55 1.46 2.82
5,000 1.69 1.36 3.53 1.45 1.36 2.67
4,000 1.60 1.25 3.40 1.34 1.25 2.52
3,000 1.50 1.12 3.25 1.23 1.12 2.34
2,000 1.39 0.97 3.09 1.09 0.97 2.14
1,000 1.27 0.78 2.90 0.92 0.78 1.89
500 0.82 0.64 1.72
Table 3 - XTT, ATT and Semi-width Values (in NM) for DME/DME RNAV (More than 2 DMEs available)
Los calculos anteriores se pueden encontrar tabulados.
13 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Sistemas de posicionamiento satelitales: TRANSITEn 1957, cuando se lanzo el Sputnik, se observo queempleando el efecto Doppler a sus senales de radio sepodıa estimar su velocidad relativa al observador.
A partir de la velocidad relativa se podıa encontrar laposicion relativa, y suponiendo que el observadorconociera su posicion perfectamente, por tanto seencontraba la posicion del Sputnik.
Se plantea la idea de invertir este calculo: conocida laposicion del satelite, y utilizando senales de radio,determinar la posicion del observador.
Un primer sistema satelital es el sistema TRANSIT:
5 satelites en orbita polar baja y 5 repuestos.Empleaba el efecto Doppler para obtener medidas 2-Dde la posicion, con precision de 200–400 m.En servicio desde 1965 hasta 1991.Actualizacion de posicion cada 30 minutos(φ = 80o)–110 minutos (φ = 00). 14 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Sistemas de posicionamiento satelitales: GPS
En los anos 60 agencias de EE.UU. (NASA,DoD...) se interesan por desarrollar un sistema:
Global.3-D.De gran precision.Con operacion continua.Util en plataformas de dinamica rapida.
En los anos 70 nace el GPS (Global Positioning System) quesatisface los criterios y es pasivo: permite infinitos usuarios.El sistema en su concepcion es de naturaleza militar.
1978: Se lanza el primer satelite.Anos 80: el sistema es operacional.Anos 90: modernizacion; el uso civil supera al militar.2000: Se desconecta la S.A. (Selective Availability).
Otros sistemas: Glonass (Rusia, global, activado en 1995 yreparado en 2011), Beidou (China, local, ano 2000) yBeidou-2 o Compass(China, global, 2020), Galileo (UE,arranque en 2011, puesta en marcha en 2019?). 15 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento espacial
Constelacion de 24 satelites (nominal)distribuidos en 6 planos orbitales, con 4satelites por plano. Orbitas circulares.
La constelacion se ubica en orbita media,con una altitud aproximada de 20200kilometros sobre la Tierra.
Satelites NAVSTAR, fabricados por RockwellInternational. Pesan 860 kg.
Cada satelite lleva a bordo un reloj atomicosincronizado con el tiempo GPS.
Cada satelite emite continuamente un mensaje en dosfrecuencias: L1(1575.42 Mhz), L2(1227.6MHz).El mensaje tiene 2 partes: C/A code (coarse/adquisition) y Pcode (precision). Contienen una secuencia que permite estimarel tiempo de recepcion e informacion sobre la localizacion delsatelite (efemerides). 16 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento de control
Segmento de control: red que monitoriza elestado de los satelites.
Actualiza con observaciones la posicion realde los satelites (efemerides).
Sincroniza los relojes atomicos.
Controlado por el ejercito. La estacion decontrol maestra esta en Colorado (SchrieverAFB).
17 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
GPS: segmento de usuario
Dispositivo que emplea un usuario de GPS para obtener suposicion a partir de las senales recibidas. Para elloimplementa un algoritmo de estimacion de posicion.
Requiere: receptor de radio, reloj de cuarzo.
Contiene un propagador de orbitas: calcula la posicion de lossatelites a partir de las efemerides.
El GPS fue concebido con uso dual, civil o militar.La senal militar esta encriptada, y permite mayor precision(PPS=Precise Positioning System). La senal civil tenıa ruidoanadido para hacerla menos precisa (SPS=StandardPositioning System). Esta adicion de ruido se denominabaS.A.=Selective Availability, pero se desactivo en 2000,incrementando la precision SPS.Las precisiones mınimas SPS son del orden de 13m. 2drmshorizontal, 22m 2-σ vertical, 0.2m/s 2-σ en velocidad y 40ns2-σ en tiempo. 18 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Observables. Pseudodistancia.
Las medidas del receptor GPS se denominan observables.A partir de las senales enviadas por un satelite, es posibledeterminar el tiempo t0 en el que se enviaron. Comparandocon el tiempo t1 de recepcion, el primer observable que seobtiene es la diferencia de tiempos ∆t = t1 − t0.Llamando r a la distancia receptor-satelite, r = ‖r‖ = c∆t,donde c es la velocidad de la luz. Definamos ρ = c∆t.Si el reloj del receptor (un reloj de cuarzo) estuvierasincronizado perfectamente con el tiempo GPS (dado por losrelojes atomicos a bordo de los satelites), entonces ρ serıa unamedida exacta de la distancia.Pero un reloj de cuarzo tiene errores; treceptor = tGPS + tu,donde tu es el sesgo del reloj. Errores muy pequenoscorresponden con grandes distancias ya que c es muy elevado.Ya que ρ no es una medida exacta de la distancia se denominapseudodistancia.
19 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion.
Llamemos s a la posicion del satelite y u a la posicion delusuario. En aplicaciones GPS se suele trabajar en el sistema dereferencia ECI o a veces ECEF.
Se tiene entonces que r = s − u. Luego r = ρ− ctu = ‖s − u‖.En el mensaje de navegacion esta codificada la efemerides delsatelite con gran precision, lo que permite calcular s con granexactitud.
Por tanto para cada satelite i que sea visible en un instantedado tendremos una ecuacion del tipo ρi − ctu = ‖s i − u‖(una esfera).
¿Cuantos satelites seran necesarios para hallar u?La interseccion de dos esferas es una circunferencia.La interseccion de tres esferas son dos puntos.
Ademas tu es desconocido: son necesarios al menos cuatrosatelites.
20 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites I
Por tanto tenemos las siguientes ecuaciones:
ρ1 − ctu = ‖s1 − u‖ρ2 − ctu = ‖s2 − u‖ρ3 − ctu = ‖s3 − u‖ρ4 − ctu = ‖s4 − u‖
Es necesario un algoritmo para determinar tu y u.
Si definimos u = [xu yu zu]T y s i = [xi yi zi ]T , observese que
ρi =√
(xi − xu)2 + (yi − yu)2 + (zi − zu)2 + ctu. Por tantoρi = fi (xu, yu, zu, tu).
Supongamos que conozco una estimacion inicial de u y tu,dada por u = [xu yu zu]T y tu. Definamosδu = u − u = [δxu δyu δzu]T , δtu = tu − tu yρi = ‖s i − u‖+ ctu.
Linealicemos ahora fi en torno a la estimacion inicial.
21 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites IISe tendra que:
ρi = fi (xu , yu , zu , tu) = fi (δxu + xu , δyu + yu , δzu + zu , δtu + tu)
= fi (xu , yu , zu , tu) +∂fi (xu , yu , zu , tu)
∂xuδxu +
∂fi (xu , yu , zu , tu)
∂yuδyu +
∂fi (xu , yu , zu , tu)
∂zuδzu
+∂fi (xu , yu , zu , tu)
∂ tuδtu
Se tiene que:
∂fi∂xu
= − (xi − xu)√(xi − xu)2 + (yi − yu)2 + (zi − zu)2
Puesto que todo es conocido en la expresion de arriba,definimos axi = − ∂fi
∂xu= (xi−xu)√
(xi−xu)2+(yi−yu)2+(zi−zu)2.
Similarmente se define ayi = − ∂fi∂yu
y azi = − ∂fi∂zu
.
Finalmente se tiene que ∂fi∂ tu
= c .
Por tanto la linealizacion queda:ρi = ρi − axi δxu − ayi δyu − azi δzu + cδtu
22 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la posicion con cuatro satelites III
Definamos ∆ρ = ρi − ρi = axi δxu + ayi δyu + azi δzu − cδtu.Si definimos:
∆x =
δxuδyuδzu−cδtu
, ∆ρ =
ρ1 − ρ1ρ2 − ρ2ρ3 − ρ3ρ4 − ρ4
, H =
ax1
ay1az1
1ax2
ay2az2
1ax3
ay3az3
1ax4
ay4az4
1
Se tiene que ∆ρ = H∆x .
Por tanto para determinar ∆x simplemente ∆x = H−1∆ρ yse obtienen los errores respecto a la estimacion inicial.Algoritmo iterativo: dada una estimacion inicial u0, t0
u y lasmedidas ρi :
1 Formar ρ0i , ∆ρ0 y H0.
2 Encontrar ∆x0 = (H0)−1∆ρ0.
3 Mejorar la estimacion inicial usando ∆x0, obteniendo u1, t1u .
4 Formar ρ1i , ∆ρ1 y H1.
5 Encontrar ∆x1 = (H1)−1∆ρ1.6 Iterar hasta que ‖∆xn‖ ≤ ε, una tolerancia predefinida.
23 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de mınimos cuadrados para GPS
El algoritmo anterior no es valido si se tienen mas de cuatrosatelites, porque H no serıa cuadrada. En general para nsatelites ∆ρ es n × 1 y H es n × 4, mientras que ∆x es 4× 1.
Tıpicamente es posible tomar medidas de 5 o mas satelites;cuantos mas satelites, mas informacion se tendra y masprecision se podra alcanzar, por lo que serıa deseable unalgoritmo para calcular ∆x incluyendo todas las medidas.
Ademas, puesto que las medidas contienen error, se podrıausar un modelo del tipo ∆ρ = H∆x + ν, donde ν ∼ Nn(0,Σ)es un modelo del error para la pseudodistancia.
Este modelo es apto para ser resuelto con el algoritmo demınimos cuadrados (ponderados o no), que ademaspermitira estimar el error que se esta cometiendo en ∆x apartir del valor de H y de Σ.
Se obtiene: ∆x = (HTH)−1HT∆ρ.24 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Errores en los observables
Es razonable suponer Σ =
σ2
1
σ22
. . .
σ2n
, donde σi es
la varianza del error de cada pseudodistancia.
No obstante, es usual despreciar la diferencia de errores entresatelites. Por tanto en primera aproximacion se tomaσ2i = σ2
UERE , por lo que no tiene sentido usar mınimoscuadrados ponderados y se usa simplemente el algoritmobasico.UERE=User Equivalent Range Error, una estimacion cuyovalor tıpico es σUERE ∼ 7− 1,5m (PPS-SPS), y proviene delas siguientes fuentes de error (sumadas con RSS):
Segmento espacial: error reloj (1.1 m), calculo orbita (0.8 m).Segmento usuario: Efectos atmosfericos, ruido del receptor yresolucion, efectos multicamino: 7-1.4 m. (PPS-SPS)
25 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP I
Por tanto en primera aproximacion Σ = σ2UERE Idn.
La covarianza del resultado sera: Cov [∆x ] =(HTH)−1HTσ2
UERE IdnH(HTH)−1 = σ2UERE (HTH)−1.
Definimos G = (HTH)−1, llegamos a Cov [∆x ] = σ2UEREG .
El significado fısico de Cov [∆x ] viene dado por
Cov [∆x] =
Var [δx2
u ] Cov [δxuδyu ] Cov [δxuδzu ] Cov [δxuδtu ]Cov [δxuδyu ] Var [δyu ] Cov [δyuδzu ] Cov [δyuδtu ]
Cov [δxuδzu ] Cov [δzuδyu ] Var [δz2u ] Cov [δzuδtu ]
Cov [δxuδtu ] Cov [δtuδyu ] Cov [δtuδzu ] Var [δt2u ]
= σ2UERE
G11
G22G33
G44
Los valores interesantes son los de la diagonal: nos dicen lavarianza en las diferences direcciones y el tiempo.
Estas varianzas son el producto de dos factores: σ2UERE , que
depende de la senal, y G , que depende solo de H, que a su vezsolo depende de las derivadas de fi : es decir de la geometrıa.�� ��ERROR GPS=(FACTOR GEOMETRICO)× (ERROR SENAL)
26 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP II
Estos valores en la diagonal de G se combinan para formar losllamados factores DOP, que nos dicen cuanto afecta lageometrıa a la solucion del error. Los valores tıpicamenteusados son:
GDOP-Geometric Dilution of Precision.GDOP =
√G11 + G22 + G33 + G44.
PDOP-Position Dilution of Precision.PDOP =
√G11 + G22 + G33.
TDOP-Time Dilution of Precision. TDOP =√G44.
HDOP-Horizontal Dilution of Precision. GDOP =√G11 + G22.
VDOP-Vertical Dilution of Precision. VDOP =√G33.
Usando los factores DOP podemos hallar rapidamente unaestimacion de la precision de nuestro GPS:
σz = VDOP × σUEREσt = TDOP × σUERE/cPrecision horizontal 2− DRMS = 2HDOP × σUERE
27 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP III
¿Como influye la geometrıa en G?
Intuitivamente, parece bastante claroque si las medidas se obtienen desatelites muy proximos, los resultadosno seran buenos.
Estudiamos para el caso de 4 satelitesla configuracion que minimiza elGDOP, con los satelites visibles en elhorizonte (elevacion mınima 5 grados).
La elevacion/azimut optimo de los satelites es:
Satelite 1 2 3 4
h 5o 5o 5o 90o
Az 0o 120o 240o 0o
Nota: Al azimut de 1-3 se le puede anadir cualquier valorconstante, siempre que se anada a todos. 28 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Factores DOP IV
Dicha configuracion optima es un tetraedro, con el usuariosituado aproximadamente en el centro de una de las caras, yel vertice opuesto a dicha cara justo sobre el usuario.Para esta configuracion se tiene:
H =
0 0,996 0,087 1
0,863 −0,498 0,087 1−0,863 −0,498 0,087 1
0 0 1 1
→ G = (HTH)−1 =
0,672 0 0 0
0 0,672 0 00 0 1,6 −0,5050 0 −0,505 0,409
Los factores DOP son: GDOP = 1,83, PDOP = 1,72,TDOP = 0,64, HDOP = 1,16, VDOP = 1,26.
Tomando σUERE = 7m (SPS):
Error vertical: 17.64 metros 2-σ.Precision horizontal 16.24 metros 2-DRMS.Precision en tiempo 2-σ:2× TDOP × σUERE/c = 30 ns
29 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Calculo de la velocidad
Una sistema de navegacion enfocado a navegacion aerea nosolo debe ser capaz de hallar la posicion, sino tambien lavelocidad (y la actitud).
Un sistema GPS se puede actualizar aproximadamente desde 1(receptores basicos baratos) hasta unas 20 veces por segundo(receptores con gran capacidad de calculo, muy caros). Comoprimera idea para calcular v podrıamos usar simplemente laposicion en dos medidas consecutivas: v = u(t+∆t)−u(t)
∆t .
No obstante si v es elevado (lo que siempre sucede enaeronaves), incluso para un alto ancho de banda, la anteriorformula es poco precisa e introduce errores.
Los receptores GPS modernos encuentran la velocidadmediante otro observable: la frecuencia de la portadora. Estafrecuencia se modifica por el efecto Doppler, debido a queentre el usuario y el satelite existe una velocidad relativa.
30 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Efecto Doppler
Ecuacion del efecto Doppler: fR = fT
(1− v r · a
c
), donde:
fR es la frecuencia recibida.fT es la frecuencia transmitida (conocida).v r = s − u es la velocidad relativa satelite-usuario.a = s−u
‖s−u‖ es el vector unitario en la direccion satelite-usuario.
Si ya hemos obtenido la posicion siguiendo los metodosanteriormente descritos se puede considerar a conocido.
Por tanto la diferencia de fase ∆f vendra dada por:
∆f = fR − fT = −fTv r · ac
.
Por otro lado el observable no es directamente ∆f , porque elreloj del segmento de usuario no tiene la suficiente precision eintroduce errores de medida de frecuencia de la siguienteforma: fM = fR − fM tu, donde fM es la frecuencia medida.
31 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Deriva del reloj de usuario
Para entender la ecuacion fM = fR − fM tu, imaginemos que elusuario mide una senal dada por y = sin(a · τ), donde τ es eltiempo del receptor.El receptor del usuario deduce que tiene una senal de aHercios. Por tanto fM = a.Pero si τ 6= t, donde t es el tiempo GPS, se introduce unerror. Este error es τ = t + tu, donde tu es la deriva del relojdel usuario. Imaginemos que tu ' c1 + c2t. Luego tu = c2.Entonces realmente y = sin(at + ac1 + ac2t), lo que es unasenal de a + ac2 Hercios (ac1 es un desfase y no influye en lafrecuencia de la senal). Luego fR es igual a a + ac2.En efecto, se verifica: a = a + ac2 − ac2.Aunque tu puede ser muy pequeno, tiene un efecto muysignificativo en el resultado real, ya que estara multiplicadopor c . Por tanto una deriva de 1 microsegundo por segundo(10−6) darıa errores del orden de 300 m/s! 32 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de calculo de velocidad I
Por tanto tenemos las dos ecuaciones: fR − fT = −fTv r · ac
y
fM = fR − fM tu.
Eliminando fR , se llega a:
cfM − fT
fT= −v r · a− c
fMfT
tu
Puesto que v r = s − u, escribimos:
cfM − fT
fT+ s · a = u · a− c
fMfT
tu
Llamemos d = c fM−fTfT
+ s · a; es un vector conocido enfuncion de los datos, la medida de fase de la portadora, elcalculo orbital, y la estimacion anterior de la posicion.
Para cada satelite (un mınimo como ya vimos de 4) setendra una ecuacion: d i = u · ai − c fMi
fT itu
33 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
GPS: segmentosCalculo de posicion. Errores.Calculo de velocidad.
Algoritmo de calculo de velocidad II
Observese que las componentes de ai a partir de una posicionanteriormente estimada u son:axi = (xi−xu)√
(xi−xu)2+(yi−yu)2+(zi−zu)2,
ayi = (yi−yu)√(xi−xu)2+(yi−yu)2+(zi−zu)2
,
azi = (zi−zu)√(xi−xu)2+(yi−yu)2+(zi−zu)2
.
Estos valores ya se habıan calculado anteriormente en laestimacion de posicion! Luego son conocidos. Llegamos a:d i = axi ux + ayi uy + azi uz − c fMi
fT itu
Aproximamos fMifT i' 1. Por tanto llegamos a la ecuacion
d = Hg , donde H es la matriz que se uso para estimar laposicion, d es un vector con las medidas y datos, yg = [ux uy uz − ctu]T que hay que calcular.
Resolvemos el problema por mınimos cuadrados como antes.34 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad, integridad y continuidad.
En la tabla se resumen la mayorparte de los sistemas denavegacion en uso.
Como se puede ver, el GPS es elque consigue mayor precision.
No obstante, la precision no esel unico parametro por el que sedebe elegir un sistema denavegacion.
Otros conceptos de granimportancia son integridad,continuidad y disponibilidad.
35 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad I
Se define disponibilidad (availability) de un sistema denavegacion como el porcentaje del tiempo que dicho sistemaes “utilizable”, dentro de su area especificada de cobertura.
Utilizable se refiere a que el sistema cumple unos requisitosmınimos (p.ej. en precision) previamente especificados. Unadefinicion tıpica de utilizable es que el usuario obtenga unPDOP ≤ 6.
En el caso del GPS, el area de cobertura es toda la superficiede la Tierra, pero tambien hay que considerar el llamado“angulo de mascara”: el angulo de elevacion en el horizonte apartir del cual los satelites se consideran visibles para elreceptor GPS.
En un entorno urbano o con accidentes geograficos dichoangulo tendra que considerarse mayor que en un entorno sinaccidentes (p.ej. el mar).
36 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad II
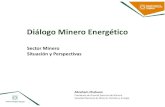
The threshold for the maximum acceptable DOP value is dependent on thedesired accuracy level. The availability of GPS, therefore, will depend on the strin-gency of the accuracy requirement. For this analysis, availability of GPS is chosen tobe defined as PDOP ! 6, which is commonly used as a service availability thresholdin the GPS performance standards [17].
336 Performance of Stand-Alone GPS
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angleAv
aila
bilit
y(%
)
PDOP
Figure 7.9 Cumulative distribution of PDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angle
Avai
labi
lity
(%)
HDOP
Figure 7.8 Cumulative distribution of HDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
The threshold for the maximum acceptable DOP value is dependent on thedesired accuracy level. The availability of GPS, therefore, will depend on the strin-gency of the accuracy requirement. For this analysis, availability of GPS is chosen tobe defined as PDOP ! 6, which is commonly used as a service availability thresholdin the GPS performance standards [17].
336 Performance of Stand-Alone GPS
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angleAv
aila
bilit
y(%
)
PDOP
Figure 7.9 Cumulative distribution of PDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
7.5 Deg. mask angle5.0 Deg. mask angle2.5 Deg. mask angle0.0 Deg. mask angle
Avai
labi
lity
(%)
HDOP
Figure 7.8 Cumulative distribution of HDOP with 7.5º, 5º, 2.5º, and 0º mask angles.
Los datos mostrados son para la constelacion nominal y paradistintos angulos de mascara.Los datos son a nivel global y en intervalos de 5 minutos.Para angulos de mascara de 0, 2.5 y 5 grados la disponibilidades del 100 %. Para 7.5 grados se encuentra una disponibilidaddel 99.98 %. La duracion maxima de los periodos de nodisponibilidad con dicho angulo de mascara es de 10 minutos,y suceden para latitudes extremas (mayores de ±60o). 37 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad III
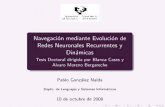
rences of these during the day. The majority of the outages are 10 minutes or less.This constellation provides an availability of 99.903%.
7.4 GPS Availability 339
99.999
99.99
99.9
99
90
70
50
30
10
1
0.10 1 2 3 4 5 6 7 8 9 10
24 Satellites23 Satellites22 Satellites21 Satellites
Avai
labi
lity
(%)
PDOP
Figure 7.12 Cumulative distribution of PDOP with 5º mask angle cases of 24, 23, 22, and 21satellites.
!150 !120 !90 !60 !30 0 30 60 90 120 150
1- to 5-minute outages6- to 10-minute outages
!150 !120 !90 !60 !30 0 30 60 90 120 150
!90
!60
!30
0
30
60
90
!90
!60
!30
0
30
60
90
11- to 15-minute outages
Figure 7.13 Availability of the GPS constellation with a 5º mask angle with one satellite removedfrom the constellation.
• Date of prediction: The date for which the prediction is to be performed. TheGPS almanac can be used to accurately predict for approximately 7 days inthe future.
• Mask angle: The elevation angle above the horizon at which satellites are con-sidered visible by the GPS receiver.
• Terrain mask: The azimuth and elevation of terrain (buildings, mountains,and so on) that may block the satellite signal can be entered into the programto ensure an accurate prediction.
• Satellite outages: If any satellites are currently out of service, their status willbe reflected in the almanac data. However, if satellites are scheduled for main-tenance for a prediction date in the future, the software allows the user tomark those satellites unusable. This data can be obtained from the USCGNAVCEN Web site.
• Maximum DOP: As discussed previously, in order to determine availability, amaximum DOP threshold must be set (e.g., PDOP = 6). If the DOP exceedsthat value, the software will declare GPS to be unavailable. Other applicationsmay use criteria other than DOP as the availability threshold. This will be dis-cussed further in Section 7.3 for aviation applications.
Once these parameters have been input into the software, the prediction can beperformed. A prediction was performed for Boston (42.35ºN, 71.08ºW) on Decem-
7.4 GPS Availability 341
!150 !120 !90 !60 !30 0 30 60 90 120 150
1- to 5-minute outages6- to 10-minute outages
!150 !120 !90 !60 !30 0 30 60 90 120 150
!90
!60
0
30
60
90
!90
!60
!30
0
30
60
90
11- to 20-minute outages21- to 30-minute outages
31- to 40-minute outages41- to 65-minute outages
!30
Figure 7.15 Availability of the GPS constellation with a 5º mask angle with three satellitesremoved from the constellation.
Solo el 72 % del tiempo la constelacion nominalesta disponible (por errores o reparaciones).Tıpicamente fallan 1, 2 o 3 satelites; el 98 % del tiempohabra al menos 21 satelites.En la figura de la izquierda se muestra el PDOP para 24,23,22y 21 satelites con angulo de mascara 5 %. Las disponibilidadesson respectivamente 100 %, 99.969 %, 99.903 % y 99.197 %.Las zonas sin disponibilidad se muestran en la derecha para elcaso de 21 satelites. 38 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Disponibilidad IV
plied by the total system. Integrity includes the ability of a system to provide validand timely warnings to the user, known as alerts, when the system must not be usedfor the intended operation.
344 Performance of Stand-Alone GPS
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.18 Satellite visibility/availability over a 24-hour period.
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.19 Satellite visibility/availability over a 24-hour period with satellites 16, 25, and 26removed from the constellation.
plied by the total system. Integrity includes the ability of a system to provide validand timely warnings to the user, known as alerts, when the system must not be usedfor the intended operation.
344 Performance of Stand-Alone GPS
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.18 Satellite visibility/availability over a 24-hour period.
Satellite visibility and GPS availability forecastSV1245679121415161718192021222324252627282931
GPSavailable
0 2 4 6 8 10 12 14 16 18 20 22 24Time of day (hours UTC)
Dilution ofprecision
No. visible
GPS
Location
12/23/94Z42.35N71.08W0.00km7 deg 3DPDOP 6.0
Figure 7.19 Satellite visibility/availability over a 24-hour period with satellites 16, 25, and 26removed from the constellation.
Tambien se pueden realizar analisis locales, con toda laconstelacion nominal o quitando satelites, con distintosangulos de mascara, etc...Por ejemplo la figura muestra un analisis local para Boston.Con tres satelites menos hay dos cortes al dıa.Para realizar este tipo de analisis es util software de analisisorbital, como por ejemplo STK (que se usara en las practicas).
39 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Continuidad
Se define continuidad (continuity) de un sistema denavegacion respecto a una mision u operacion, como laprobabilidad de que dicho sistema sea “utilizable” de formacontinua por toda la duracion de dicha mision u operacion.
Utilizable se define respecto a los requisitos mınimosrequeridos por la operacion o mision, puede venir dado enterminos de PDOP u otros terminos.
La continuidad depende mucho de la mision u operacion, peroen cualquier caso esta claramente relacionada con fallos noplanificados de satelites. La probabilidad estimada de que unsatelite deje de emitir de forma no planificada, es del0.0001 %.
40 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Integridad
Se define integridad (integrity) de un sistema de navegacioncomo la capacidad de dicho sistema para advertir que elsistema no debe ser utilizado (debido a que no esta operativoo contiene errores). Por tanto da una medida de la confianzaque se puede tener en el sistema.El sistema GPS no proporciona, por sı mismo, ningunmecanismo de integridad. Pueden suceder errores crıticos (aveces denominados “aberraciones”) que degraden el sistema.Por ejemplo:
Efectos de la radiacion en el espacio: pueden afectar a losrelojes o a la electronica de los satelites, provocando senalesanomalas.Fallos en los satelites.Error humano, de software o de hardware en el segmento decontrol.
Son errores raros que ocurren pocas veces al ano, pero no sonadmisibles para aplicaciones de navegacion aerea.
41 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Tecnicas de mejora de integridad
Puesto que la integridad es crıtica para muchas aplicaciones,como por ejemplo aviacion, se han implementando diversosmecanismos para proporcionar integridad al GPS.
Las tecnicas de GSP diferencial (que veremos a continuacion)pueden proporcionar integridad.Una tecnica muy utilizada es la RAIM (Receiver AutonomousIntegrity Monitoring):
Es un algoritmo incorporado al receptor.Requiere al menos cinco satelites visibles: detecta lainconsistencia de la solucion y avisa que el GPS no debe serutilizado.Para ello emplea tecnicas estadısticas de estimacion.Si tiene al menos seis satelites visibles, es capaz de ignorar elsatelite y seguir proporcionando datos de navegacion fiables.
Observese que puesto que RAIM requiere 5 o 6 satelites, ladisponibilidad y continuidad con RAIM sera menor en general.
42 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial
Para mejorar la precision del GPS (o la integridad) se empleanlas tecnicas de GPS diferencial (DGPS).La idea basica es usar una o mas estaciones (pseudollites),cuya posicion se conoce con gran precision, equipadas con unreceptor GPS y en comunicacion con el usuario(GBAS=Ground-Based Augmentation Systems).Tambien se pueden emplear satelites extra que proporcionenmedidas adicionales (SBAS=Space-Based AugmentationSystems). Por ejemplo, la red europea EGNOS.Los sistemas DGPS se clasifican como:
Absolutos (ECEF) o relativos (posiciones relativas a laestacion).Por zona geografica de cobertura:
Locales (10-100 km)Regionales (menos de 1000 km)Wide-area (mas de 1000 km)
Basados en pseudodistancias o en fases (en fases son masprecisos, pueden conseguir precision de mm.) 43 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial: principios basicos de funcionamiento I
extremely important, since they directly influence the performance achievable forany type of DGPS system. The underlying algorithms and performance of code- andcarrier-based DGPS systems are presented in Sections 8.3 and 8.4, respectively.Some important DGPS message standards are introduced in Section 8.5. The finalsection, Section 8.6, details a number of operational and planned DGPS systems.
8.2 Spatial and Time Correlation Characteristics of GPS Errors
Many of the GPS error sources discussed in Chapter 7 are highly correlated overspace and time. All DGPS systems exploit these correlations to improve overall sys-tem performance. For instance, in a simple local-area DGPS system with a single ref-erence station (see Figure 8.1), the errors in the reference station’s pseudorange andcarrier-phase measurements for visible satellites are expected to be very similar tothose experienced by a nearby user. If the reference station estimates the errors byleveraging its known surveyed position and provides this information in the form ofcorrections to the user, it is expected that the user’s position accuracy will beimproved as a result. This section quantifies the correlation of GPS errors betweenreceivers separated over some distance (often referred to as the baseline, which maybe interpreted as a vector) and over time. Time correlations (i.e., how rapidly theerrors change with time), are also of interest, because in general DGPS systems can-not instantaneously provide data to the end user—even with a high-speed radio linkthere is some finite delay associated with the generation, transmission, reception,and application of the data.
8.2.1 Satellite Clock Errors
Satellite clock errors are one of the simplest GPS errors to correct. This is because asatellite clock error causes the same effect on pseudorange and carrier-phase mea-surements, regardless of the location of the user. For instance, if the satellite clock
8.2 Spatial and Time Correlation Characteristics of GPS Errors 381
User
Referencestation
Satellite
Figure 8.1 Local-area DGPS concept.
Ejemplifiquemos el funcionamiento delDGPS con un caso simple: GBAS,absoluto, local, basado en distancias ycon una sola estacion.
Recordemos que el usuario debeencontrar su posicion u resolviendo elsistema de 4 o mas ecuacionesρi − ctu = ‖s i − u‖+ νu, donde νuson los errores de las senales recibidaspor el usuario.
Supongamos ahora que se tiene una estacion (pseudollite) deposicion m = [xm ym zm]T ; su distancia al satelite i es:Rmi = ‖s i −m‖ =
√(xi − xm)2 + (yi − ym)2 + (zi − zm)2.
Si tiene un error de reloj tm, las medidas de pseudodistanciaen la estacion seran: ρmi − ctm = ‖s i −m‖+ νm
44 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
GPS diferencial: principios basicos de funcionamiento II
La posicion de la estacion es fija y conocida .Por tanto conocemos la cantidad∆ρmi = Rm
i − ρmi = −ctm − νm.La estacion envıa ∆ρmi al receptor, y el receptor calcula(ρi )corr = ρi + ∆ρmi = ‖s i − u‖+ c(tu − tm) + (νu − νm).Si definimos tum como el error del reloj del receptor respectoal reloj de la estacion, tum = tu − tm observamos que(ρi )corr = ‖s i − u‖+ ctum + (νu − νm).Por otro lado, ν ′ = νu − νm ≪ νu, porque νu y νm seran muyparecidos. Luego hemos conseguido reducir mucho el error.El nuevo tiempo que calculemos sera con respecto a laestacion. Pero la estacion puede calcular su error respecto alsatelite e incluirla en su mensaje de radio, de forma quetu = tum + tm. Luego recuperamos el tiempo GPS.Se consigueσUERE ≈ 0,3m + (1− 6 cm)× (dEST−RECEP en km). 45 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Calculo de la actitud mediante GPS ICon DGPS de precision (basado en fases) se obtiene laactitud. Se situan n antenas receptoras en puntos separadosde la aeronave y un unico receptor.Se conoce la posicion de las antenas en ejes cuerpo, Rb
k , y se
miden con DGPS la posicion de las antenas en ejes ECEF, Rek .
Se calculan las diferencias de posicion entre antenas Rbk − Rb
j ,
y para las medidas de GPS Rek − R
ej ; por hipotesis de GPS
diferencial, los errores se cancelan aproximadamente.Llamemos a estas medidas rbi y rni , respectivamente.Por ejemplo si hay 3 antenas habra 3 diferencias (aunque solodos independientes). Si hay 4 antenas habra 6 medidas (tres
independientes). En general habra n(n−1)2 medidas. Ademas
construimos mas medidas con los productos vectoriales entreellas, obteniendo el doble de medidas: n(n − 1).Suponiendo la posicion conocida, obtenemos Cn
e y calculamosrni = Cn
e rei .
46 / 47

Navegacion por posicionamientoGNSS: Navegacion por satelite
GPS: Otros conceptos
Disponibilidad, integridad, continuidadSistemas de aumento: GPS diferencialCalculo de la actitud
Calculo de la actitud mediante GPS IIQueremos calcular Cb
n de las ecuaciones rbi = Cbn r
ni .
Formemos las matrices Rb = [rb1rb2 . . . r
bn] y Rn = [rn1r
n2 . . . r
nn].
Se tendra que Rb = CbnR
n. Conviene mejor escribirRn = (Cb
n )TRb, para invertir datos conocidos (Rb) y nomedidas (Rn). Si tuvieramos tres medidas independientes, sepodrıa hacer (Cb
n )T = Rn((Rb)T )−1.En general tendremos al menos 6 medidas (para 3 antenas,tres medidas directas y los respectivos productos vectoriales),o mas para 4 o mas antenas.Por tanto no se puede invertir la matriz Rn y se usara unasolucion de mınimos cuadrados, que es la siguiente:
(Cbn )T = Rn(Rb)T
(Rb(Rb)T
)−1
Trasponiendo esta ecuacion: Cbn =
(Rb(Rb)T
)−1Rb(Rn)T
El mınimo de antenas necesario sera de 3 (para dos antenassolo tenemos un dato de diferencias). Se suelen usar 4, parareducir errores.
47 / 47