Notas de Clase Física Mecánica-Uchile CeC

of 184
-
Upload
jeison-rojas -
Category
Documents
-
view
232 -
download
0
Transcript of Notas de Clase Física Mecánica-Uchile CeC
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
1/184
Captulo 1
Movimiento y Coordenadas
1.1. Posicin y movimiento
Los primeros movimientos que fuerondescritos por medio de ecuaciones, en el marco de lo que entendemos porfsica, posiblemente fueron los que se refieren al movimientos de cuerposen el cielo: el movimiento del Sol y la luna, el movimiento de las estrellas
yen un momento culminanteel movimiento de los planetas que nosdieron Coprnico, Galileo, Kepler y Newton en tres etapas de la historia.
Todas estas primeras descripcio-nes cuantitativas de movimiento sehicieron como si los cuerpos fue-sen simples puntos en movimien-to ya que, en efecto, de este mo-do lo esencial queda descrito por elmovimiento del centro del cuerpo.Normalmente, el movimiento des-
crito abarca una trayectoria much-simas veces ms grande que el ta-mao del cuerpo en cuestin.Por ejemplo, el dimetro de la Tie-rra es cien mil veces ms chico queel dimetro de su rbita alrededordel Sol.
.
Tolomeo (siglo II) describe con mucho inge-
nio el movimiento de los planetas colocan-
do a la Tierra al centro. Coprnico (contem-
porneo de Coln) expone en 1512 que el
Sol est al centro y los planetas tienen r-
bitas perfectamente circunferenciales alre-
dedordel Sol. Casi un siglo despus Kepler
descubre que las rbitas de los planetas
son realmente elpticas. Su Nueva Astro-noma es publicada en 1607. Cuando en
1632 Galileo public su libro Dilogos so-
bre los dos sistemas del mundo (el de To-
lomeo y el de Coprnico), fue acusado y
enjuiciado por la Inquisicin.
9
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
2/184
10 P. Cordero S. & R. Soto B.
Otro de los muchos aportes de Galileo fue describir que el movimiento
de cuerpos en cada libre y el movimiento de proyectiles en lanzamientobalstico depende de la llamada aceleracin de gravedad, g. Al nivel delmar g=9,8 ms2 .
Aceptemos, entonces, que la atencin en una buena parte del estudio deMECNICAestar dirigida a describirpuntosen movimiento.
El pasajero de un vehculo, seor D, le comenta a su vecino Tque aquelpequeo insecto sobre el otro asiento est totalmente quieto. Lo cual quieredecir que el insecto est quieto con respecto al vehculo, pero este ltimo vaa 50 Km/hr con respecto a la carretera.
Para describir el movimiento de un punto es necesario establecer una re-ferencia respecto a la cual se define velocidades y qu est inmvil. Paradescribir movimiento en tres dimensiones ya veces en un plano, es de-cir, en dos dimensionesla posicin del punto en estudio es descrito porun vector r(t). El vector posicinr(t)siempre se define en relacin a unareferencia particular y ms aun, debe estar definido un punto Oque es elorigen de coordenadas.
Poco rato despus el seorDobserva que el insecto est caminando porla pared plana del interior del vehculo. RpidamenteD escoge un punto Osobre la pared y dos vectores unitarios perpendiculares entre s: y jy logradeterminar que el movimiento del insecto queda bien descrito por
r(t) =R0
cos(2t/t0) +jsin(2t/t0)
donde R0=10 [cm] y t0=2 [minutos]. qu tipo de movimiento es ste? Pri-mero calcule la magnitud de este vector,r(t) =
rr y compruebe que
resultaR0, es decir, la magnitud del vector posicin no cambia con el tiempo.En el instante t=0se cumpler(0) =R0 mientras que en el instante t1=
t04 es
r(t1) = R0j. Dibuje la trayectoriadel insecto y sobre esa trayectoria marqueparte del itinerario, segn las definiciones que se dan a continuacin.
El vector posicin r(t)define, en su evolucin, un conjunto de puntos quese denominatrayectoria. Elitinerarioagrega a la trayectoria la informacindel valor de ten el cual el punto en movimiento pasa por las diversas
posiciones de la trayectoria.
Una trayectoria puede ser definida como una relacin entre las coordena-das. Por ejemplo, un objeto en un plano, con coordenadas cartesianas (x,y)puede tener una trayectoria dada por
x2
b2+
y2
a2 =1
1.1. POSICIN Y MOVIMIENTO Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
3/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 11
Otro ejemplo
z= 4zmx2m
(xmx)x
que representa un movimiento parablicoen el plano verticalX Ztal quecuan-dox=0y tambin cuandox=xmresultaz=0mientras que cuandox=xm/2la coordenadazalcanza un valor mximo z =zm.
La velocidad es la variacin de la posicin en el tiempo, y la aceleracin esla variacin de la velocidad en el tiempo
v (t) =dr(t)
dt , a (t) =
dv (t)
dt =
d2r
dt2. (1.1.1)
Al definir al vector velocidad como la derivada del vector posicin se estdefiniendo a la velocidad como el lmite:
v(t) =dr
dt l m
=0
r(t+ )r(t)
Para terminar de aclarar este punto compruebe, mediante un dibujo, que elvector velocidad asociado a un movimiento circunferencial es necesariamen-te un vector tangencial a la circunferencia.
Las expresiones anteriores pueden ser invertidas. Por ejemplo, la definicinde velocidad recin dada puede ser integradautilizando como variable deintegracin a una variable auxiliar t, desde un tiempo escogido t0hasta untiempo arbitrariot,
r(t)r(t0) = t
t0
v(t) dt (1.1.2)
que es ms conveniente escribir como
r(t) =r(t0) +
tt0
v(t) dt (1.1.3)
Si en la expresin anterior se escoge t= t0 el trmino integral es nuloporque el dominio de integracin es nuloy resulta una identidad.
En forma similar se puede invertir la definicin de aceleracin obtenindose
v(t) = v(t1) +
tt1
a(t) dt (1.1.4)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
4/184
12 P. Cordero S. & R. Soto B.
EJEMPLO: Problema de lanza-
miento de un objeto desde unaposicin inicial r(t0) = r0 conuna velocidadv(t0) =v0sabien-do que la aceleracin tiene unvalor fijo: a(t) = g. Primero seusa (1.1.4) y se obtiene
v(t) =v0 +g t
t0
dt =v0 +(tt0)g(1.1.5)
Luego se usa esta ltima ex-presin en (1.1.3) y puedecomprobarse que arroja
Unidades:En este texto se utilizar el sistema MKS
de unidades. La longitud se expresa en metros, eltiempo en segundos y la masa en kilogramos.
caminata normal 1mxima velocidad en ciudad 18vmaxen cada libre 50avin comercial 275velocidad del sonido en Valparaso 340
Valor aproximado de algunas velocidades comunes
expresadas en metros por segundo.
r(t) =r0+ (t t0)v0+(t t0)2
2 g (1.1.6)
O O
rr
Figura 1.1: Vectores posicin a partir de dos orgenes distintos.
Si el movimiento de un punto Pes descrito desde dos orgenes Oy Ofijos,los vectores posicin ry rse relacionan por
r(t) = OO +r (t)
Puesto que OOno depende del tiempo, la velocidad y la aceleracin res-pecto a ambos orgenes son iguales.
A qu velocidad le crece el pelo? Cul es el rcord en carreras de 100 me-tros? (En carreras olmpicas de 60 metros los atletas alcanzan velocidades algo menores
a8,6metros por segundo.) A qu velocidad remacha un buen tenista?
Si un automvil va a 18 metros por segundo y frena con una aceleracinnegativa de magnitud2g, en qu distancia se detiene? Cunto vale su peso
1.1. POSICIN Y MOVIMIENTO Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
5/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 13
en ese momento? Esta pregunta se refiere a la fuerza asociada a la aceleracin
total.
Suponga que un vehculo que iba a 18 metros por segundo en el momentode chocar contra un obstculo duro, es detenido en una dcima de segundo, a
travs de un proceso con aceleracin uniforme. Cul es el valor de la aceleracin
durante este proceso?
Calcule la velocidad con que llega al suelo un cuerpo que es soltado en reposodesde una altura h. Aproximadamente desde qu altura se atrevera usted a
saltar al suelo? A qu velocidad golpean sus pies el suelo? Desde el momento
t0 en que sus pies tocan el suelo hasta que su tronco se detiene, t1, los msculos
de las piernas actan como freno. Para simplificar, suponga que esa frenada esuna aceleracin negativa constantea0 en el lapso(t0,t1). D algn valor realista
al cambio de altura del su tronco en ese lapso y deduzca un valor numrico para
a0. Compare ese valor con la aceleracin de gravedad.
Si se sabe que la velocidad de un punto como funcin del tiempo es
v(t) =R0 sin t+j cos t+k v3
y que la posicin ent=0 esr(0) = R0, determine la posicin del punto en todoinstantet>0y tambin la aceleracina(t). Haga un dibujo 3D del movimiento del
punto y dibuje la direccin en que apuntaa(t)en distintas partes de esa trayecto-ria.
1.2. Coordenadas y movimiento
El movimiento se puede describir con diversos tipos de coordenadas. Enlo que sigue se define tres sistemas de coordenadas que se usar en ME-CNICA: coordenadas cartesianas, cilndricas y esfricas. Para cada unode estos sistemas de coordenadas tridimensionales se define tres coor-
denadas escalares que son (x,y,z) en cartesianas; ( , ,z) en cilndricasy (r, ,) en esfricas y adems se define vectores unitarios asociados aesas coordenadas espaciales:( ,j, k), ( ,, k)y (r,,)respectivamente.Estos vectores unitarios apuntan en una direccin que, en general, depen-de del punto que se est describiendo. Slo en coordenadas cartesianasesto no ocurre as.
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
6/184
14 P. Cordero S. & R. Soto B.
1.2.1. Coordenadas cartesianas
Ellas se basan en los ejes mutuamente perpendiculares X, Y y Z. Estosejes tienen asociados los vectores unitarios(,j, k). Los ejes y los vectoresunitarios asociados se suponen fijos al sistema de referencia en el cual sedescribe el movimiento. Los vectores de posicin, velocidad y aceleracinson
r(t) = x(t) +y(t) +z(t) k
v (t) = x(t) +y(t) +z(t) k (1.2.1)
a (t) = x(t) +y(t) +z(t) k
coordenadas vectoresx, y,z , j,k
Las coordenadas (x(t),y(t),z(t)) de un punto mvil dependen del tiempopero los vectores unitarios son constantes.
1.2.2. Coordenadas cilndricas
^
^
r
X
Y
Z
k
^
P
z
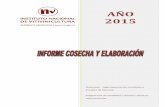
Figura 1.2: Las coordenadas ci-lndricas de un punto P son: , la
distancia deP al ejeZ, que es el
ngulo que forma el plano que pasa
por el eje Z y por OP con el plano
X Z y la coordenada z que es igualque en el caso cartesiano.
Dado un punto P con coordenadas car-
tesianas (x,y,z) se dibuja un cilindro cu-yo eje coincide con el eje Z y con radio =
x2 +y2, de tal modo que P est en
el manto del cilindro cuyo radio es . Laproyeccin al plano X Ydel vector posicinrdel punto P tiene longitud y forma unngulo con el eje X. Las coordenadas ci-lndricas de P son las cantidades (, ,z).La relacin con las coordenadas cartesia-nas es
x = cos y = sin (1.2.2)
z = z
A este sistema de coordenadas se le aso-cia vectores unitarios (,, k) los cuales se relacionan a (,j, k) a travs
1.2. COORDENADAS Y MOVIMIENTO Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
7/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 15
de
= cos + jsin
= sin + jcos k = k (1.2.3)
i
X
Y^
^ ^
^
^j
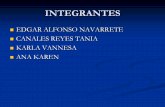
Figura 1.3: Aqu el ejeZ es per-pendicular al papel, y se puede
apreciar la relacin entre las coor-
denadas(, ) y los vectores unita-rios y.
Estos vectores unitarios apuntan, en cadapunto P escogido, en la direccin en queuna sola de las coordenadas cilndricas va-ra.
Por ejemplo, si se considera un punto Qin-
finitesimalmente cercano aPque compartecon P el mismo valor de y de z, y solo di-fieren por la coordenada , (Q= P+ d)entonces el vector apunta en la direccinde Pa Q.
coordenadas vectores ,, z , ,k
A diferencia del sistema cartesiano decoordenadas, ac la direccin de los vec-
tores unitarios bsicos depende del puntoPque se est considerando.
r
zk
Figura 1.4: El vectorposicin r puede serexpresado como com-
binacin lineal deyk.
Al describir un movimiento los vectores base y engeneral cambian de orientacin. Las derivadas tem-porales de ellos es proporcional a ,
= =
En el caso de un punto mvil las coordenadasdependen en general del tiempo: ((t),(t),z(t)) y
de los tres vectores unitarios dos son variables yellos dependen del ngulo que es una coorde-nada que en general depende del tiempo, es decir:(((t)),((t)), k).
A esto se debe que al derivar con respecto al tiempo,las coordenadas se derivan directamente con respec-
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
8/184
16 P. Cordero S. & R. Soto B.
to al tiempo, mientras que los vectores unitarios se
derivan utilizando la regla de la cadena. Por ejemplo,
=d
dtpero
ddt
=d
dt
dd
Con todo lo anterior los vectores de posicin, velocidad y aceleracin encoordenadas cilndricas son
r = +zk
v = + +z k (1.2.4)
a = 2 + 2+ +zk
Ntese que el ltimo parntesis se puede escribir
2+ =1
d
dt
2
(1.2.5)
Todas las cantidades, exceptok, dependen en general del tiempo, sin em-bargo para que la notacin no aparezca tan pesada se ha omitido colocar(t) en cada factor.
Volviendo al significado de la frase que dice que los vectores unitariosapuntan, en cada punto P escogido, en la direccin en que una sola de
las coordenadas cilndricas vara. se observa que si se diferencia r, dadoen (1.2.4), se obtiene dr= d+ d
dd+ dz k, pero d
d =por lo que se
obtienedr=d + d+ dz k
Cada uno de los tres sumandos anteriores contiene la diferencial de una delas tres coordenadas cilndricas. Si se vara una sola coordenada, esa esla nica diferencial no nula, y drapunta, como se ha dicho, en la direccindel correspondiente vector unitario.
Estudie el movimiento de un punto P para el cual las coordenadas cilndri-cas en todo momento son: = 0, (t) =
120 t
2, z(t) = A (t). Obtenga el vector
velocidad y aceleracin y describa la geometra de la trayectoria en detalle.
1.2.3. Coordenadas esfricas
1.2. COORDENADAS Y MOVIMIENTO Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
9/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 17
r
r
^
^
^
Figura 1.5: La figura representa
las coordenadas esfricas y los vec-
tores unitarios asociados.
Las coordenadas esfricas de un punto P
son: la distancia rde Pal origen, el ngu-lo que forma rcon el eje Zy el ngulo que ya fue definido para coordenadas ciln-dricas:(r, , ). Se relacionan a las coorde-nadas cartesianas por
x = rsin cos
y = rsin sin (1.2.6)
z = rcos
A estas coordenadas se asocia vectoresunitarios y ellos son
r =
cos + jsin
sin +kcos
=
cos + jsin
cos ksin = sin + jcos
Se destaca que
k = rcos sin (1.2.7)=cos + jsin = cos +rsin (1.2.8)
coordenadas vectores
r,, r, ,
Tal como en el caso anterior, los vectores unitarios bsicos dependen delpunto que se est considerando y por tanto ellos, en general, varan con eltiempo. Sus derivadas son
r = sin + = cos r (1.2.9) = cos +rsin
Con lo anterior se puede obtener expresiones para la posicin, la velocidady la aceleracin en coordenadas esfricas,
r =rr
v =rr+ rsin + r
a =
r r2 r2 sin2 r+ r+ 2r r2 sin cos +(r2sin2 ).rsin
(1.2.10)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
10/184
18 P. Cordero S. & R. Soto B.
Compruebe que
dr=r dr+r d+ rsin d
Considere un cono con vrtice en el origen y eje que coincide con el ejeZ ycuyo ngulo de apertura es(es decir, las rectas sobre el manto forman ngulo
con el ejeZ). Describa en coordenadas esfricas el movimientos de un punto que
baja por el manto de este cono si se sabe que pierde altura a velocidad constante
(es decir, la coordenadaz(t)satisfacez=v3) y que adems=0. Tome comocondicin inicial que el punto est sobre el manto conr(0) =R0 y(0) =0.
1.2.4. Elementos de superficie y volumen
En coordenadas cilndricas un elemento de superficie sobre el mantocilndrico de radio es
dS = ddz (1.2.11)
Mientras que el elemento de superficie en un plano perpendicular al eje Zes
dS = d d (1.2.12)
El elemento de volumen es
dV = d ddz (1.2.13)
El coordenadas esfricasun elemento de superficie sobre un manto es-frico de radio res
dS =r2 sin dd (1.2.14)
y el elemento de volumen es
dV =r2 sin dr dd (1.2.15)
1.3. Velocidad angular
La velocidad angular expresa la tasa de cambio de orientacin que sufreel vector posicinrcuando se desarrolla el movimiento. El concepto develocidad angular,, est ligado al origen de coordenadas que se escojay representa tanto la tasa de variacin de orientacin como tambin la
1.3. VELOCIDAD ANGULAR Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
11/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 19
orientacin del eje en torno al cual rrota. Ella se puede expresar como
el producto cruz entre los vectores posicin y velocidad, dividido por elcuadrado de la magnitud de r,
(t) =rvr2 (1.3.1)
Se ilustra lo anterior con un ejemplo.
EJEMPLO:Un movimiento uniforme y rectilneo paralelo al eje Xy a distan-cia bde l es descrito por
r=b j + (x0 v0 t) v=v0 (1.3.2)
se muestra en la figura adjunta,
x=x0 v0 t, y=b , = arctan bx0 v0 t (1.3.3)
De los datos dados en (1.3.2) y de la definicin dese obtiene que
= b v0k
b2 + (x0 v0t)2 (1.3.4)
i
b
v
O
j
0
Figura 1.6: Un movimiento rectil-neo y uniforme. Se conocenb yv0.
Por otro lado, se puede calcular directa-
mente de observar que
tan= b
x0 v0tDerivando esta relacin con respecto altiempo se obtiene que vale
= b v0
b2 + (x0 v0t)2 (1.3.5)
que es coherente con la expresin para la forma vectorial de la velocidad
angular.Ntese que si se hubiera escogido el origen sobre la recta, se tendra queb=0y se habra obtenido velocidad angular nula.
De lo anterior, la velocidad angular depende del origen Orespecto al cualse define. Estrictamente adems, la velocidad angular es un vectorcuya
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
12/184
20 P. Cordero S. & R. Soto B.
magnitud es d/dty que apunta en la direccin del eje respecto al cual
el punto en movimiento gira visto desde ese origen. Se usa la regla de lamano derecha. En el ejemplo anterior la velocidad angular apunta en ladireccin k, y la velocidad angular vectorialen ese ejemplo es =k.
Un corolario de lo anterior es que si se tiene una funcin vectorial cualquie-raA(t)tridimensional, la variacin de su orientacin en el tiempo es
A=A
A2 dA
dt
Si se hace el producto cruz de cada miembro de esta igualdad con Aseobtiene
AA= dA
dt
A dAdt
A2A
Pero siAes una funcin vectorial que cambia de orientacin en el tiempotal que su magnitud permanece constante, entonces A A= constanteloque implica queA dA
dt =0. En tal caso la ltima ecuacin se reduce a
dA
dt =A
A
A
A=constante (1.3.6)
Considere una circunferencia de radioR en el planoX Ycentrada en un puntodel ejeXa distanciaa del origen. Suponga un puntoP que se mueve con rapidez
uniformev0 sobre esa circunferencia y determine la velocidad angular deP con
respecto al origen.
1.4. Rapidez, aceleracin centrpeta y tangencial
La trayectoria de un punto Ptiene, en cada instante, un vector tangencialt, un radio de curvatura Cy un vector nel vector normalque apuntadesde la trayectoria hacia el centro de curvatura asociado. Estos conceptospermiten otra descipcin del movimiento.
1.4. RAPIDEZ, ACELERACIN CENTRPETA Y TANGENCIAL Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
13/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 21
s
C
B
C
A
Figura 1.7: Cada punto A de una trayectoria (curva diferenciable) tiene asociado un centro decurvatura C y un radio de curvaturaC. El arco de trayectoria s que describe un punto mvil en
un pequeo intervalo t ess=Cdondees el ngulo que subtiende tal arco desde C. Lacuerda asociada tiene una longitud que coincide con la magnitud del vectorr(t) =r(t+t)r(t).El ngulo entre la tangente en A a la trayectoria yr es 12. En el lmite t 0 la tangente alarco en A apunta en la misma direccin que la cuerda.
1.4.1. Velocidad y rapidez
Considere la trayectoria de un punto en movimiento y sean A y B las posi-ciones del punto sobre su trayectoria en instantes ty t+t. Si se denotaporsal largo del arco de trayectoria desde Aa B, se define la rapidezdel
punto mvil sobre su trayectoria como
v= l mt0
s
t =
ds
dt (1.4.1)
que es una cantidad escalar. A continuacin se ver la relacin que existeentre el concepto de velocidadv(t) y el de rapidez v(t). Para definir es-tos conceptos se debe dar un sentido (arbitrario) a la forma de recorrer lacurva. Por ejemplo, si en la figura se escoge el sentido positivo hacia laderecha, un desplazamiento hacia la derecha se describe con und s>0yun desplazamiento hacia la izquierda tiene asociado un d s
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
14/184
22 P. Cordero S. & R. Soto B.
subtiende un pequeo ngulo . La longitud sde un arco se relaciona
al elemento de ngulo pors=C (1.4.3)
Ntese que el signo de es, por definicn, igual al signo de s. La lon-gitud de la cuerda asociada es AB =2Csin 2 . Puesto que en el lmite dengulo muy pequeo, el seno de un ngulo se aproxima por el ngulo mis-mo, entonces en ese lmite la longitud de la cuerda es Cy coincidecon la longitud del arco. Este resultado sirve, en el prrafo que sigue, pararelacionar la magnitud de la velocidad con la rapidez.
Los vectores posicinr(t)yr(t+t) del movimiento de un punto difieren en
r = r(t+t)r(t) r(t)
t t
v (t)tTomando el lmite t 0se obtiene que dr(t) = v (t) dt. Pero en el prra-fo anterior se vio que la cuerda, que en este caso tiene longitudr(t),coincide en el lmite en que tes infinitesimal, con el arcos:
v = l mt0
r(t)t
= l mt0 |s(t)
|t
= |v(t)| (1.4.4)es decir,
v= |v| (1.4.5)
De (1.4.3) tambin se sabe que el radio de curvatura de una trayectoriaest dado por
C= ds
d (1.4.6)
Seatel vector unitario, tangente a la trayectoria de un punto, que apunta enla misma direccin que dr, es decir, en la misma direccin que v, pero noapuntan necesariamente en el mismo sentido. Se escoge como definicinque el vector unitario tapunte en el sentido en el cual crece el arco s(t)recorrido, de tal modo que
v (t) =v(t) t (1.4.7)
1.4. RAPIDEZ, ACELERACIN CENTRPETA Y TANGENCIAL Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
15/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 23
En resumen, la velocidad es siempre tangencial a la trayectoria y la mag-
nitud de la velocidad coincide con el valor absoluto de la rapidez.
En un parque de diversiones hay un juego que consiste en disparar a unblanco mvil que se desplaza a velocidad constantev1 a lo largo de una recta
L. Se sabe que los proyectiles salen desde el sitioD de disparo con rapidezv0. Si
en el instante en que se hace el disparo el blanco est al pie de la perpendicular
de largobque va deD aL, con qu ngulo se debe hacer el disparo para dar
en el blanco?
P
C
^t(t)
^t(t+ )
dt
t(t+ )
Figura 1.8:El vector dt=t(t+ ) t(t)dondees un tiempo muy pequeo, es un vector que, en ellmite 0, apunta hacia el centro de curvatura. En la figura el vectort(t+ )ha sido trasladadoal punto correspondiente al tiempo t para poder hacer la diferencia geomtricamente.
1.4.2. Coordenadas intrnsecas
1.4.2.1. Los vectoresty n.
Puesto que el vector tes unitario
t t=1 implica t dtdt =0 (1.4.8)
es decir, el vectordt/dtes ortogonal at. La figura adjunta debiera ayudar aver que este vector apunta hacia el centro de curvatura. Se denominarnvector normalal vectorunitarioque apunta hacia el centro de curvatura.Ya se vio que la magnitud de cuerda y arco, en el caso en que estos sean
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
16/184
24 P. Cordero S. & R. Soto B.
muy pequeos, coincide y adems se vio en (1.4.3) que ese arco es igual
al radio multiplicado por el elemento de ngulo. Puesto que tes unitario, alrotar describe un arco de radio 1 y por tanto la cuerda asociada, que tienela magnitud de t, es 1 multiplicado por el elemento de ngulo, es decir,dt=d. Usando (1.4.6) se obtiene que
dt= dn= ds
Cn equivalentemente
dt
ds=
1C
n (1.4.9)
1.4.3. Aceleracin centrpeta y tangencial
La aceleracin es la derivada de la velocidad,
a (t) = dv (t)
dt =
d(v(t) t)
dt
= v(t)dt
dt+
dv(t)
dtt (1.4.10)
El ltimo trmino en esta expresin es la parte de la aceleracin que apuntatangencial a la trayectoria. Se la llama aceleracin tangencial. El primertrmino a la derecha es
v(t)
dt
dt =v(t)
ds
dt
dt
ds (1.4.11)
perods/dt= v(t)y dt/ds =n/Cpor lo que la aceleracin se puede escribir
a (t) = v2(t)
Cn +
dv(t)
dtt
= an(t) +at(t)
(1.4.12)
El primer trmino es un vector que apunta hacia el centro de curvatura y
se lo conoce como aceleracin centrpeta. El segundo es la aceleracintangencial.
Demuestre que el radio de curvatura es igual a
C= v2
ta = v3
va (1.4.13)
1.4. RAPIDEZ, ACELERACIN CENTRPETA Y TANGENCIAL Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
17/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 25
EJEMPLO:Consideremos un punto en movimiento en un plano cuya trayec-
toria es descrita por una circunferencia:
r=R0
cos+ jsin
, = (t) (1.4.14)
Diferenciando se obtiene
dr=R0 sin+ j cosd (1.4.15)
cuya magnitud esdr=R0 d= ds (1.4.16)
En este caso el vector tangencial es
t= sin + j cos (1.4.17)De aqu se puede calculardt/ds porque de (1.4.6) ya se sabe que d/ds =1/C, y en el presente caso esC= R0, y se obtiene
n=cos j sin (1.4.18)
Para poder calcular la velocidad y la aceleracin es necesario dar la de-pendencia del vector posicin en el tiempo. Supongamos el caso particularen que el ngulo vara linealmente con el tiempo, =t, es decir, hayunavelocidad angularconstante: = . Entonces, tal como ya se sabe de(1.4.7), la velocidad es tangente a la trayectoria, y en este case es
v=R0 t (1.4.19)
de donde la rapidez resulta constante: v=R0.
Se puede ver tambin que en este caso particular la aceleracin tangenciales nula debido a que la rapidez es constante. La aceleracin centrpeta es
an(t) =
R0
costj sin t (1.4.20)que apunta siempre hacia el centro.
Si un automvil toma una curva de 50 metros de radio (aproximadamentemedia cuadra) a 24 metros por segundo, cunto vale la aceleracin centrpeta?Es una fraccin deg o es mayor queg?
Si un avin va a dos veces la velocidad del sonido y gira describiendo unarco de circunferencia, cul es el valor mnimo que puede tener ese radio si la
aceleracin mxima que soporta el piloto es6g?
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
18/184
26 P. Cordero S. & R. Soto B.
Considere el movimiento de un punto que describe la trayectoria plana
r=0
cos+ j sin
+ (1.4.21)
con= t. Tanto0 comoson constantes dadas. Determined s/d, y por tanto
ds/dt; calcule el vector tangente unitario t(t) en funcin del tiempo; obtenga elvector velocidad en cualquier instante t y tambin calcule la aceleracina(t) e
indique los valores de las partes centrpeta y tangencial.
^^
R M
O
T
Figura 1.9: Un hiloideal es desenrollado de
un cilindro de radioR
Un hilo de grosor nulo est enrollado en una circunfe-rencia de radioR manteniendo tensa la punta libreM. La
parte no enrollada siempre es tangente a la circunferen-
cia y el puntoTde tangencia est totalmente determina-
do por el ngulo polar. El hilo est siendo desenrollado
por medio de un mecanismo que hace que cambie en
el tiempo en la forma:= 2t2, donde es un nmero
dado. Calcular la ecuacin paramtrica de la trayectoria
del extremoMlibre del hilo sabiendo que inicialmente la
parte libre era de largoL0 y colgaba verticalmente. Ob-
tenga las componentes de la velocidad y la aceleracin
expresada con los vectores unitarios y . Obtenga losvectores tangentety normalnde la trayectoria que des-cribeM cuandocrece. Tambin obtenga, para cada punto de la trayectoria el
radio de curvatura.
Indicaciones: La posicin de Tsiempre es T =R y la posicin de Mpuedeescribirse comoM= TL(t), dondeL(t)es el largo variable deTa M. Tambinhay que tomar en cuenta que si en un intervalo el punto Trecorre una distancias,en ese intervalo la longitud L(t)crece en esa misma cantidad s.
Un disco de radioR rueda sin resbalar por un suelo horizontal (el eje de rota-
cin de la rueda es horizontal). Su centroO tiene aceleracin constantea=a0 .
Encuentre la magnitud de la velocidad angular con respecto aOy obtenga la ace-
leracin de cualquier puntoP sobre el borde del disco, relativa al suelo. Encuentre
los vectorest yn de la trayectoria de P como funcin del ngulo queOP for-ma con la vertical. Obtenga la magnitud de la aceleracin centrpeta y el radio de
curvatura de la trayectoria deP.
1.4. RAPIDEZ, ACELERACIN CENTRPETA Y TANGENCIAL Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
19/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 27
1.5. Movimientos particulares
A continuacin se presentan algunos movimientos particulares r(t)que sepueden obtener a partir de datos especficos.
1.5.1. Movimiento uniforme
Un caso muy sencillo es el del movimiento uniforme. Este es aquel para elcual la velocidad es uniforme y por tanto la aceleracin es nula,a=0. Sise dan como datos la posicin t=t0y que para todo instante
v (t) = v0
se puede invertir la definicin de velocidad y obtener que
r(t) = r0+
tt0
v (t) dt
= r0+v0
tt0
dt
= r0+ (t t0)v0 (1.5.1)
1.5.2. Movimiento con aceleracin constante
Esta vez se da como dato que la aceleracin es
a (t) = g
y adems que la posicin en un instante t0 es r0 y que la velocidad en uninstantet1es v1.
Integrando la definicin de aceleracin se obtiene que
v (t) = v1+ (t
t1)g (1.5.2)
Una vez conocida la velocidad se calcula la posicin en un instante arbitra-rio integrando una vez ms
r(t) = r0+
tt0
v (t) dt
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
20/184
28 P. Cordero S. & R. Soto B.
= r0+ t
t0v1+g (t t1)dt
= r0+ (t t0)v1+
t2 t202 (t t0)t1
g (1.5.3)
Si tantot0 comot1son nulos y v1 es denotada v0, la expresin anterior sereduce sencillamente a
r(t) =r0+ tv0+t2
2g (1.5.4)
1.5.3. Movimiento circunferencial
X
Y
^^
0
Figura 1.10: Un movimiento circunferencial de radio 0 se describe por la velocidad angular(t) (t). circunf
El movimiento circunferencial general est caracterizado por el radio fijo0de la circunferencia descrita por el punto mvil y por la velocidad angular(t) = . En este caso los vectores posicin, velocidad y aceleracin encoordenadas cilndricas son
r(t) = 0(t)
v (t) = 0 (t) (1.5.5)a (t) = 0
(t)(t)2(t) (t)
la velocidad angular es(t)y (t)es laaceleracin angular
(t) = (t)
(t) = (t) (1.5.6)
1.5. MOVIMIENTOS PARTICULARES Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
21/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 29
La expresin paraadada arriba qued naturalmente separada en un tr-
mino radial deaceleracin centrpeta,0 2 y un trmino de aceleracintangencial, 0(t).
1.6. Problemas
1.1 Por la orilla se una mesa rueda sin deslizar una rueda de radio R1 convelocidad angular constante . Esta rueda tiene pegada en forma radial
una varilla de largoR2 (R2> R1). Describa el movimiento de la punta de la
varilla (distanciaR2 del centro de la rueda) a medida que la rueda avanza.
Dibuje la curva (x-z) que describe la trayectoria de este punto. Dibuje lacomponente horizontal, vx de la velocidad de la punta como funcin del
tiempo, en particular incluya el caso en queR2=R1.
1.2 Un globo asciende desde la superficie terrestre con velocidad vertical uni-forme v0. Debido al viento, el globo adquiere una componente horizontal
de velocidad que crece con la altura: vz = z, donde es una constante
conocida yz es la altura sobre el terreno. Escogiendo el origen de coorde-
nadas en el punto de partida determine: a) La trayectoria del globo; b) la
componente tangencial y normal de la aceleracin en funcin de la alturaz.
1.3 Un punto se mueve ascendiendo por el manto de un cono de eje vertical, yvrtice abajo, de tal modo que asciende a medida que gira en torno al eje:
z= A . El cono mismo se caracteriza por que las rectas sobre su manto
que contienen al vrtice forman un ngulo fijocon el eje. Describa el mo-
vimiento (los vectoresr(t), v(t) ya(t)) suponiendo que(t) es una funcin
arbitraria. Calcule tambin la curvatura de la trayectoria como funcin dez
y de.
1.4 El punto de unin P entre un pistn yuna biela de largoD se mueve a lo lar-
go del ejeX debido a que el cigeal
(disco) de radioa y centro en un punto
fijoC, rota a velocidad angularcons-tante. En el instantet=0 la biela esthorizontal
Da
P
A
C
(=0, x =D + a). a) Encuentre una expresin para la distanciax(t)entreP yCcomo funcin det. b) Encuentre la velocidadv(t) deP. c) En la
expresin parav(t)considere el casoa Dy de ah encuentre una expre-
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
22/184
30 P. Cordero S. & R. Soto B.
sin aproximada para la aceleracin deP. Cmo se compara la magnitud
de la aceleracin mxima del pistn con la aceleracin del puntoA?
1.5 Una barra rgida de largodse mueve apoyada entre dos paredes rgidas,que forman un ngulo recto entre ellas.
Si el ngulo es una funcin arbitraria del
tiempo= (t), (a) Determine el vector posi-
cin, velocidad y aceleracin del punto medio
de la barra. (b) El radio de curvatura de una
trayectoria se calcula como =v3/||va||.Calcule el radio de curvatura de esta trayec-
toria. Interprete el resultado y dibuje la trayec-
toria. (c) Suponga ahora que el apoyo inferiorde la barra se mueve con rapidez constante.
Encuentre la funcin(t) que da lugar a ese
movimiento.
d
O
1.6. PROBLEMAS Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
23/184
Captulo 2
Dinmica
2.1. Momentum lineal, fuerza y leyes de Newton
Galileo observa fines del siglo XVIque cuerpos inicialmenteen reposo, soltados desde la misma altura, caen con movimiento unifor-memente acelerado y esa aceleracin es comn a todos los cuerpos. Talaceleracin se denominaaceleracin de gravedad. Si un cuerpo es solta-do con velocidad inicial nula desde una altura z0 sobre el suelo su altura
posterior, como funcin del tiempo, es
z(t) =z0 g2
t2
sin importar cual sea la masa del cuerpo. De lo anterior la aceleracinresulta ser z= g. Deduzca que el cuerpo llega al suelo con rapidez z=2z0 gdonde el signo menos, en este caso, expresa que la velocidad eshacia abajo.
Lacantidad de movimientoomomentum linealpde una partcula de masa
my velocidadvesp (t) = mv (t) (2.1.1)
La masa de un cuerpo es normalmente una cantidad fija y se mide en kilo-gramos,K y, salvo que especficamente se diga lo contrario, se supondrque la masa de un cuerpo es constante.
31
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
24/184
32 P. Cordero S. & R. Soto B.
Sin embargo hay casos en que la masa vara. Un ejemplo muy
tpico es el de un cohete que est expulsando parte de su masa, enforma de gases, para poder impulsarse.
Para percibir la cantidad de movi-miento se puede experimentar de-jando caer desde el reposo doscuerpo desde la misma altura. Alrecibirlos en nuestras manos y tra-
tar de detenerlos es necesario unmayor esfuerzo cuando la masadel cuerpo es mayor. La razn deeste mayor esfuerzo reside en quepara detener el cuerpo, es decir,para hacer variar su momentum li-neal desde el valor que tiene hastacero, es necesario aplicar una fuer-za.
.
Luego de hacer una serie de experimen-tos, el italiano Galileo Galilei determin quecuerpos de distinto peso y forma caen conla misma aceleracin. (Antes que Galileo,el fraile dominico Domingo de Soto (Espa-
a, s. XVI) haba afirmado lo mismo, pe-
ro no est establecido si fue una hiptesis
filosfica o si se bas en evidencia experi-
mental.) Esto ech por tierra la creencia es-tablecida por Aristteles (384BC - 322 BC)que loscuerpos ms livianoscaen ms len-tamente. La ley de Galileo es estrctamentevlida en ausencia de aire y es aproxima-damente vlida para cuerpos que tienen laforma o el peso que permiten despreciar lafuerza viscosa del aire.Puesto que la aceleracin de gravedad esmuy grande, es decir, un cuerpo alcanzauna velocidad muy alta en un corto tiem-po, Galileo hizo experimentos con cuerposrodando por un plano inclinado.
Newton descubri que la relacin general entre la variacin del momentum(esto esdp/dt) y la fuerza total aplicada es
dp (t)
dt =Ftotal (2.1.2)
que se conoce como la II ley de Newton.
Un caso especial es que no haya fuerza alguna aplicada. En tal casodp/dt=0 lo que implica que el momentum permanece constante en eltiempo. Esto implica (masa constante) que la velocidad del cuerpo no cam-bia y por tanto la trayectoria es rectilnea. Esta es la I ley de Newton. Un
caso aun ms especial es el de un cuerpo en reposo.Inversamente, si un cuerpo tiene velocidad constante, entonces la fuerzatotal sobre ese cuerpo necesariamente es nula.
En (2.1.2) la fuerza es la fuerza total. Sobre un cuerpo pueden estar ac-tuando muchas fuerzas simultneamente y el lado derecho en (2.1.2) debe
2.1. MOMENTUM LINEAL, FUERZA Y LEYES DE NEWTON Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
25/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 33
GALILEO
NEWTONKEPLER
BRAHE
XVI XVII
VALDIVIA
COLON VIVALDI
1500 1600 1700
VERMEERCERVANTES
REMBRANDT
EL GRECO
LEONARDO
BOTTICELLI
MIGUEL ANGEL
J S BACH
COPERNICO
BRUNO
D. de SOTO
Figura 2.1: Los aos en que vivieron algunos de los fundadores de la Mecnica y algunos perso-najes destacados en otras reas.
tener la suma vectorial de todas las fuerzas que estn actuando sobre elcuerpo.
Cuando un mozo lleva un vaso sobre una bandeja hay variasfuerzas actuando sobre ese vaso: su peso, mg; una fuerza, llamadanormalque la bandeja ejerce sobre el vaso y que es perpendicular ala superficie de contacto; otra fuerza, esta vez contenida en el planode contacto, llamada roceque impide que el vaso deslice en la ban-deja; tambin el aire ejerce una fuerza viscosasobre el vaso, porquetodo fluido (el aire, por ejemplo) tiende a frenar a un cuerpo que semueve en l.La lista se podra continuar (la luna, el sol etc).
La III ley de Newtondice que si el cuerpo A ejerce una fuerza Fsobre uncuerpoB, entonces el cuerpo Bejerce una fuerza Fsobre el cuerpo A.
Un cuerpo en reposo sobre una mesa ejerce sobre ella su fuerzapeso F=mg, la que apunta verticalmente hacia bajo, y entonces,segn la III ley de Newton, la mesa ejerce sobre el cuerpo una fuerza,llamadanormal, sobre el cuerpo, la que valeN= mg, la cual apunta
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
26/184
34 P. Cordero S. & R. Soto B.
verticalmente hacia arriba. Puesto que sobre el cuerpo est adems
la atraccin que le ejerce la Tierra (el peso), entonces la fuerza totalsobre este cuerpo es nula, lo que permite entender porqu est enreposo.
Normalmente las leyes de Newton se asocian a sistemas de referencia lla-madossistemas de referencia inerciales. Un ejemplo de sistema de refe-rencia no inercial es un vehculo describiendo una curva. Un cuerpo dejadoen reposo respecto al vehculo tiende a moverse alejndose del centro decurvatura. Ms adelante se dir que en sistemas de referencia no inercia-les aparecen fuerzas especiales como es la fuerza centrfugay la fuerzade Coriolis. Genricamente se denominar seudofuerzas a estas fuerzaspropias de los sistemas no inerciales. Pero en un sistema de referenciainercial no se presentan tales fuerzas.
2.1.1. Ejemplos de fuerzas
A continuacin se har mencin de algunas fuerzas que se utiliza en estasnotas. Las fuerzas que se describen a continuacin sern explicadas conms detalle ms adelante.
o Peso. Sobre un cuerpo de masamcerca de la superficie de la Tierraacta una fuerza cuya magnitud esmgy apunta hacia abajo.
o Gravitacional. La Ley Universal de Gravitacin describe la fuerza deatraccin gravitacional entre cuerpos masivos.
o Coulomb. Cargas elctricas se repelen o atraen, segn la Ley deCoulomb, dependiendo si tienen signo igual o distinto.
o Contacto. En cada punto en que dos cuerposAyBestn en contactoslido-slido aparece una fuerza FABsobre A debido al contacto con
B(y lo mismo sobre Bdebido a A). Si se define el plano tangente alcontacto, la fuerza FAB puede ser descompuesta en forma nica enla suma de dos fuerza: una perpendicular al plano de contacto y otraparalela a l. Estas dos fuerzas se denominan fuerza normalyfuerzade roce.
Normal. Si un cuerpo est apoyado sobre una superficie, la su-perficie ejerce una fuerza sobre el cuerpo que corresponde a la
2.1. MOMENTUM LINEAL, FUERZA Y LEYES DE NEWTON Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
27/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 35
reaccin debido a la fuerza que el cuerpo ejerce sobre la super-
ficie. La normal es una fuerza perpendicular a la superficie decontacto.
Roce. Un cuerpo apoyado sobre una superficie puede ejerceruna fuerza paralela a la superficie de contacto. Si la velocidadrelativa entre el cuerpo y la superficie es nula se tiene la fuerzade roce esttico y si la velocidad relativa entre el cuerpo y lasuperficie no es nula se tiene una fuerza de roce dinmico.
Otras fuerzas sern introducidas ms adelante. Por el momento subraya-mos que si un cuerpo est apoyado en una superficie y no hay roce entre
ambos, entonces la nica fuerza sobre el cuerpo debido a este contacto esla fuerza normal.
2.1.2. Ejemplo de argolla en una vara horizontal que gira
X
g
k
Figura 2.2: Una argolla que puede desli-zar libremente, sin roce, a lo largo de una
varilla y la varilla gira barriendo con veloci-
dad angular uniforme= un plano hori-zontal. argolla
Consideremos el caso de una argo-lla que puede deslizar, libre de roce,a lo largo de una vara y esta vara gi-ra barriendo un plano horizontal convelocidad angular = constante.
El problema ser descrito con coor-denadas cilndricas y los vectores ba-se asociados son (,, k) de tal for-ma quekes vertical hacia arriba.
La fuerza total de contacto sobre laargolla, igual que cualquier vector,puede expresarse con los vectoresbase:
Fcont= f1+ f2+ f3k
pero la componente en la direccin representara roceya que es la
direccin en la que puede haber movimientopor lo cual se debe exigirque f1=0. Lo que resta, f2+ f3kes normal a la vara y por lo tanto esla fuerza llamada normal. Las fuerzas sobre la argolla son: su propio pesoP= m g ky la fuerza normal Nque la varilla ejerce sobre la argolla. Eneste caso normal quiere decir ortogonal a la varilla, por lo tanto es unafuerza que ya se ha mencionado y que puede tener componentes en la
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
28/184
36 P. Cordero S. & R. Soto B.
direccin verticalky tambin en la direccin . Cambindole el nombre a
las componentes de la normal, ella se puede escribir
N= Nkk+N (2.1.3)
Puesto que la argolla no tiene movimiento horizontal, la fuerza total en esadireccin debe ser nula, es decir, Nkk+P=0, que implica:Nk= m g.
Las condiciones que definen el movimiento son
(t) =, (0) =0 , (0) =0 (2.1.4)
y, puesto que el movimiento ocurre en un plano horizontal, la aceleracin
tiene la forma (ver (1.2.4)),a=
2+ 2+ (2.1.5)
El plantear la II ley de Newton en coordenadas cilndricas se puede separaren una componente radial y otra en la direccin de lo que da lugar a dosecuaciones escalares
m (2) = N (2.1.6)
2 = 0 (2.1.7)
Al integrar la segunda ecuacin se obtiene(t) =0cosh(t) (2.1.8)
que da la forma explcita del movimiento a lo largo de la vara. Este resul-tado implica que cambia con el tiempo y su variacin est relacionada aun coseno hiperblico. Esto implica, de (2.1.6), queNno es nulo.
Al usar la forma de(t), obtenida en (2.1.8), en (2.1.6) se obtiene la expre-sin paraN,
N=2m20sinh(t) (2.1.9)
Lo que se ha deducido es que la argolla se mueve deslizndose haciaafuera de la argolla. Su distancia al centro de giro:(t), aumenta exponen-cialmente con el tiempo (en efecto, para tiempos muy grandescosh(t)12
et).
Si se intenta reproducir la situacin descrita en un experimento real debe-mos tomar una argolla y una vara tal que haya roce insignificantemente
2.1. MOMENTUM LINEAL, FUERZA Y LEYES DE NEWTON Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
29/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 37
pequeo entre ambos. Con un motor controlado automticamente se man-
tendra uniforme la velocidad angular . Descubriramos, sin embargo, quellegara un momento en que el motor no sera capaz de mantener contantela velocidad angular, porque la fuerza normal que debe ejercer sobre laargolla es demasiado grande ya que la componente Ncrece exponencial-mente.
2.2. Muchas partculas
2.2.1. Caso discreto
Se considera un sistema de N partculas puntuales de masas ma, a=1,2, . . . ,N, de posicionesra, velocidadesva y aceleraciones aa. La sumade las masas se denotarM
M=N
k=1
ma (2.2.1)
y G ser la forma para designar el centro de masa. La posicin y la veloci-dad deGson
RG =
1
M
N
k=1 mara (2.2.2)
VG = 1
M
N
k=1
mava (2.2.3)
Cada partcula satisface una ecuacin de Newton
m1dv1dt
= F1
m2dv2dt
= F2
... = ...
mN dvNdt
= FN
(2.2.4)
que, al sumarlas dan
MdVG
dt= Ftotal donde (2.2.5)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
30/184
38 P. Cordero S. & R. Soto B.
F
total
=
N
k=1Fa (2.2.6)
es decir, la variacin del momentum total del sistema est dado por lafuerza total que acta sobre el sistema. Vamos a ver, un poco ms abajo,que esta fuerza total se debe exclusivamente a fuerzas externas al sistema.
La fuerza que ha sido llamada Fa es la fuerza total sobre la a-partcula ypuede descomponerse en la suma de las fuerzas que le ejercen las otraspartculas del sistema, que llamaremosfinta y la suma de las fuerzas exter-nasfexta que actan sobre la partculaa,
Fa=fext
a +fint
a (2.2.7)
A su vezfinta est compuesta de las fuerzasFabque cada partcula bejercesobrea,
finta =N
b=1 ,b=a
Fab (2.2.8)
donde automticamente la fuerza que una partcula ejerce sobre si mismaes nula,
Fbb 0 (2.2.9)Siempre se va a suponer que la fuerzaFab entre dos partculas puntuales
es paralela a la lnea que une ambos puntos.
A continuacin se argumenta, a partir de (2.2.6), que las fuerzas internasno contribuyen a la fuerza total. En efecto, al calcular la contribucin de lasfuerzas internas se tiene
N
a=1
finta =N
a=1
N
b=1
Fab (2.2.10)
pero por cada sumando Fab hay otro que es Fba y el principio de accin yreaccin establece queFba= Fab, lo que determina que la suma anteriorsea nula. En resumen,
Ftotal =a
fexta (2.2.11)
y por tanto la ecuacin de movimiento para el centro de masa Gdel sistemaes
MdVG
dt =
a
fexta Fext (2.2.12)
2.2. MUCHAS PARTCULAS Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
31/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 39
Corolario: si sobre un sistema de partculas no estn actuando fuerzas
externas, el centro de masa se mueve con velocidad uniforme.
Estudie el movimiento del centro de masa del sistema compuesto por dospartculas masivas unidas por un hilo, que rotan en torno a su centro de masa y
estn en vuelo libre en presencia de gravedadg.
2.2.2. Caso continuo
Es posible generalizar la descripcin de sistemas de muchas partculas alcaso de sistemas continuos. Esta idea se ilusta en lo que sigue a travs deun ejemplo.
X
Y
R
Figura 2.3: Un alambre semicir-cunferencial con densidad lineal de
masa= MR .
Se considera un alambre semicircunferen-cial de radioRy densidad lineal= MRcen-trado en el origen como lo muestra la figu-ra 2.3. En un caso continuo se reemplazala suma sobre el ndice apor una integral.As, entonces, en lugar deM=a mase de-be escribir
M= ds
donde ds = R des el elemento de arco.Puesto que en este ejemplo la densidad es una constante, la integral sobre desde0a es sencilla y da el resul-tado correcto. La expresin (2.2.2) para determinar la posicin del centrode masa se generaliza en la forma
RG= 1
M
r dm
donde dm = ds= MRR d= M d. Por otro lado, el vector rque recorre
la semicircunferencia esr= R
cos+j sin. Al integrar en [0,], el
trminocosda cero y el trminosinda 2, por lo cual
RG=
2R
j 0,64Rj
Haga un clculo similar pero para el caso de una lmina semicircular de ra-dioR. Ayuda: ahora la densidad es masa por unidad de superficie, =M/(2R2)y
se debe integrar un elemento de rea:dS=R d d, integrando tanto en [0,R]como en [0,].
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
32/184
40 P. Cordero S. & R. Soto B.
2.3. Momento Angular y Torque
2.3.1. Ecuaciones generales
As como el momentum lineal es una medida de la cantidad de movimientode traslacin, el momento angular,O, esen cierto modola cantidadde movimiento de rotacin en torno a un puntoO. Formalmente se definecomo la suma de los productos cruz entre las posiciones y los respectivosmomentos lineales
O(t) =a
ra(t)pa (t) (2.3.1)
Por ejemplo, en el caso de la figura 1.6 (caso de una sola partcula), r=bj + v0 ty el momentum es p= m v0 , por lo que el momento angular delejemplo es O= m b v0k.
Calcule el momento angularOde una partcula que gira con velocidad angu-lar uniforme en torno al puntoOdescribiendo una circunferencia de radioR.
Por su propia definicin el momento angular de una sola partcula 1 apun-ta en una direccin que es perpendicular al plano que definenr1yp1. Estadireccin est relacionada al eje de giro del punto mvil con respecto alpunto Oen un instante determinado. En general la direccin de ese eje va
cambiando con el tiempo.
Se tiene dos ruedas de bicicleta de igual geometra montadassobre ejes fijosgirando a igual velocidad angular. La primera es unarueda normal mientras que la otra tiene plomo en lugar de aire en sucmara. Al tratar de detenerlas se notar que se requiere de msesfuerzo para detener a la rueda con plomo. Esto se debe a que esms difcil llevar hasta cero el momento angular de un objeto queactualmente tiene momento angular ms grande.
Si se toma la derivada con respecto al tiempo del momento angular, y sesupone que las masas son contantes, se obtiene
dOdt
=a
d(rapa )dt
=a
dradtpa+
a
ra dpadt
(2.3.2)
El primer trmino del lado derecho es cero porque cada sumando es pro-porcional a va va y el ltimo trmino se puede escribir sencillamente
2.3. MOMENTO ANGULAR Y TORQUE Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
33/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 41
ra
pa, es decir,
dO(t)dt
=a
ra(t)Ftotala (2.3.3)
Para escribir esta ltima expresin se hizo uso de la segunda ley de New-ton, (2.1.2). El lado derecho de la expresin anterior es lo que se conocecomotorque totalOque producen las fuerzasFasobre el sistema de par-tculas,
Ototal =ra(t)Ftotala (2.3.4)
y por tanto
dO(t)
dt=O
total (2.3.5)
que quiere decir que la variacin del momento angular se debe a la accindel torque total que acta sobre el sistema.
Para estudiar la dinmica del momento angular se debe ver el valor deltorque total y la forma de descomponerlo. El torque total Oes la suma deltorque de las fuerzas externas y el de las fuerzas internas. Demostremosque este ltimo es nulo. Como la suma no depende del nombre de losndices, se la puede escribir intercambiando el papel de ay b. Luego sesuma ambas sumatorias y se divide por dos,
intO
= a,b
ra
Fab
= 1
2a,b
raFab+12a,b
rbFba
= 1
2a,b
(rarb)Fab (2.3.6)
es decirO=
a
ra fexta (2.3.7)
El torque total sobre un sistema depende tan solo de las fuerzas que sonexternas al sistema.
Los frenos, en un vehculo ejercen torque sobre las ruedas, elmotor tambin.
Si para un sistema el torque de la fuerza total es nulo, entonces el momentoangular tiene derivada temporal nula, es decir, es constante.
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
34/184
42 P. Cordero S. & R. Soto B.
Si para un sistema el torque no es nulo, pero una de sus componentes es
nula todo el tiempo, entonces la correspondiente componente del momentoangular es constante.
2.3.1.1. Del pndulo esfrico al pndulo cnico
r
^
^
R
g
Figura 2.4: Para descri-bir un pndulo esfrico es
conveniente escoger el ejeZ
apuntando en el mismo sen-
tido queg.
Si una masa puntual pende de un hilo de largo R,cuyo otro extremo est fijo se tiene, en general,un pndulo esfrico. Bajo condiciones inicialesparticulares puede comportarse como un pndu-lo plano (el hilo barre siempre un mismo plano
vertical) y puede ser tambin un pndulo cnicocuando la masa describe una circunferencia concoordenada cilndrica zfija o, equivalentemente,con coordenada esfrica fija. En la figura ad-junta se ha escogido coordenadas esfricas conel polo norte abajo para lograr as quedescribadirectamente la desviacin del pndulo con res-pecto a su posicin vertical en reposo.
La fuerza total sobre la masa es la suma de supeso y de la tensin del hilo. En coordenadas es-
fricasT= Try la aceleracin de gravedad, deacuerdo a la figura, es
g=g (rcossin)
Se aprecia que la fuerza total no tiene componente a lo largo de , lo quequiere decir que la componente de la aceleracin dada en (1.2.10) debeser nula, esto es,
md
dt
R2 sin2
=0
que implica que existe una constante3y
= 3
mR2 sin2(2.3.8)
Si 3 no es nulo, esta relacin implica que no puede anularse porqueeso dara que . S se puede afirmar es que la rapidez es muy gran-de cuando el pndulo pasa por puntos en que el ngulo es muy chico.
2.3. MOMENTO ANGULAR Y TORQUE Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
35/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 43
La ecuacin de movimiento es reductible entonces a solo dos ecuaciones
escalares: las componentesry :m R2 +2 sin2 =mg cosTm R
2 sincos =mgsin (2.3.9)
k^
R
Figura 2.5: Un punto material enel extremo de un hilo de largoR gira
en una trayectoria circunferencial de
radio . El otro extremo del hilo es-
t fijo. Este sistema es un pndulocnico. pconico
Un pndulo cnico, tal como se apreciaen la figura adjunta, es cnico cuando elpunto masivo gira describiendo una circun-ferencia. En tal caso el ngulo permane-ce en una valor fijo 0.
Se quiere responder a la pregunta bajo
qu condiciones un pndulo esfrico tienemovimiento cnico? De (2.3.8) se obtieneque en el caso actual es constante, y sedenominar porque es la velocidad an-gular del pndulo que gira en torno al ejevertical. Dados R y g puede tenerse unpndulo cnico para cualquier valor de ?
La segunda de las ecuaciones (2.3.9) sereduce a
R2 cos0 = g cos0 = g
R2 (2.3.10)
sin0 = 1
R
R2 g
2
4
Puesto que un coseno debe tener mdulomenor que la unidad, se debe cumplir que
g
R (2.3.11)
No es posible un pndulo cnico con velocidad angular menor que estacota. Dada una velocidad angular superior a tal cota, el pndulo debeser lanzado formando un ngulo con la vertical exactamente como el quese da en (2.3.10).
En resumen, el sistema descrito constituye un pndulo cnico tan solo si lavelocidad angular se relaciona con el ngulo que el hilo forma con la ver-
tical por medio de (2.3.10). El radio de la circunferencia es =
R2 g24
.
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
36/184
44 P. Cordero S. & R. Soto B.
2.3.1.2. El pndulo simple
R
^
^
O
mg
Figura 2.6: Un pnduloconsta de un hilo de largoR
fijo en un extremo a un pun-
toO. En el otro extremo hay
una masa puntualm.
Consideremos un pndulo plano como el de la fi-gura adjunta. Este consiste en una partcula pun-tual de masa m, unida al extremo de un hilo cuyootro extremo est fijo en un techo que tomare-mos como el punto O. El movimiento ocurre enun plano. En este ejemplo el torque se debe a lafuerza peso, g=g
cossinyr=R,
O = r (mg)
= m R gsin
k (2.3.12)
donde R es el largo del hilo. El momento angu-lar, por otro lado, es sencillamenteO =rv=m R2kporque v=R. De aqu que (2.3.5) im-plique
= gR
sin (2.3.13)
Esta es la ecuacin de movimiento de un pndulode largoR. El movimiento no depende de la masade la partcula que hay en el extremo del hilo.
Esta ecuacin supone que el hilo est siempre tenso, lo que podra noocurrir si el movimiento excede= /2.
Si las oscilaciones son pequeas, 1, se puede hacer la aproximacinsin y la ecuacin queda
= gR (2.3.14)
2.3.1.3. Uso de coordenadas esfricas: movimiento en superficie c-
nica
g
r
Figura 2.7: Un punto se mue-ve apoyado en el interior de una
superficie cnica de eje vertical
y vrtice abajo.
Consideremos una superficie cnica con ejevertical y vrtice abajo. El vrtice se escogecomo origen. Una partculaPde masamdes-liza sin roce por la superficie interior del conobajo los efectos de la gravedad.
2.3. MOMENTO ANGULAR Y TORQUE Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
37/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 45
Se desea plantear las ecuaciones de movi-
miento en coordenadas esfricas, las propie-dades del momento angular y reducir el pro-blema a uno para la coordenada esfrica r(t).La coordenadaes constante ya que ella esel ngulo entre el eje y cualquier generatriz delcono.
No hay ms fuerzas que el peso y la normal:
mg = mgrcos+sin
N = N (2.3.15)
En este caso particular la aceleracin en coor-denadas esfricas es
a=
r r2 sin2 r r2 sincos+ ddt(r2)r
sin (2.3.16)
Puesto que la fuerza total no tiene componente a lo largo de , esa com-ponente de la aceleracin debe ser nula, lo que se reduce a d
dt(r2) =0, es
decir, lo que hay en el interior del parntesis es una constante
r2 = cte o bien = 0
m r2
sin
(2.3.17)
donde0 es la magnitud del momento angular. En efecto, si se calcula elmomento angular se obtiene
=mrr rr+rsin=mr2sin (2.3.18)que, por lo que se ha dicho, es un vector de magnitud constante:
=0
La ecuacin de movimiento a lo largo deres
r r2 sin2= gcos (2.3.19)
Reemplazando en ella la expresin para se obtiene
r= 20m2 r3
gcos (2.3.20)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
38/184
46 P. Cordero S. & R. Soto B.
que es una ecuacin difcil. Hay un caso sencillo e interesante que co-
rresponden a rbitas circunferenciales horizontales de radiorH. Para estassoluciones res contante y tambin r=0por lo que el lado derecho de laltima ecuacin debe ser nulo, implicando que
r3H= 20
m2 gcos
2.3.2. El centro de masa y el momento angular
r
R
a
a
G
O
G
Figura 2.8: El vector posicinrkde una partcula k se puede des-
componer en la suma del vector po-
sicin del centro de masa, RG, y elvector posicin dekdesde el centro
de masa, k.
Se define las posiciones adesde el centro
de masa, a raRG (2.3.21)de velocidad con respecto al sistema CMes
a vaVG (2.3.22)
Demuestre queN
k=1
maa=0 (2.3.23)
A veces tambin es til la derivada tempo-ral de la relacin anterior,
N
k=1
maa=0 (2.3.24)
En 2.2 tambin se defini el momento angular total del sistema y se vioque obedece a la ecuacin
dOdt
=a
ra fexta (2.3.25)
El torque total sobre un sistema depende tan solo de las fuerzas externas alsistema. El momento angular del sistema con respecto a su propio centrode masa es
G=N
a=1
maava (2.3.26)
2.3. MOMENTO ANGULAR Y TORQUE Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
39/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 47
Sin embargo, si en la ltima expresin se hace el reemplazo va= VG+ala forma de Gse puede simplificar porque VGqueda fuera de la sumatoria(no depende de a) y (2.3.24) asegura que ese trmino no contribuye a G,concluyndose que
G=N
a=1
maaa (2.3.27)
El momento angular Otambin se puede escribir
O =N
a=1
ma
RG+a
VG+ a
= MRGVG+N
a=1
maaa (2.3.28)
Para obtener la ltima expresin se hizo uso de (2.3.23) y de (2.3.24). Elprimer trmino del lado derecho es el momento angular del sistema comoun todo con respecto al punto O, y ser denotadoOG
OG =MRGVG (2.3.29)
mientras que el ltimo trmino es G. De aqu que
O= OG +G (2.3.30)
La ecuacin de movimiento para cada cuerpo bde masambdel sistema es
mbb=FbmbRG
Derivando (2.3.27) con respecto al tiempo se obtiene
G=b
FbmbRG
La ltima suma contiene mbb=0por lo que el resultado es
dGdt
= b
bFb G (2.3.31)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
40/184
48 P. Cordero S. & R. Soto B.
Se puede anotar tambin que
O = a
ra fexta
= a
RG+a
fexta
= RGa
fexta +a
a fexta= G
O+G (2.3.32)
La ltima lnea define la notacin.
Puesto que (a) O= O, (b)
G= G, (c)O= GO+G y que (d)O=
GO
+G, se desprende que
GO
= GO, G=G (2.3.33)
El torque del peso respecto a G: Este se calcula como
G = a
maag= 0 (2.3.34)
La suma anterior se anula debido a (2.3.23). Ya que G=0entonces Gesconstante si el peso es la nica fuerza externa.
Un caso particular es el del deportista que se lanza desde un alto tablna una piscina para, despus de algunas volteretas, clavarse en el agua enforma perfecta. Un vez que est en vuelo su momento angular no puedecambiar. Tan solo alargando o acortando su cuerpo y moviendo sus brazospuede controlar su velocidad angular, pero llega al agua con el mismo Gque se dio en el momento de despegar del tabln. Los gatos hacen algoparecido para caer siempre de pi.
Lo anterior puede prestarse a confusin cuando se tiene un sistema confuerzas de contacto. Por ejemplo, si se piensa al sistema de la figura 2.6como una barra ideal sin masa con una partcula en cada extremo (esdecir, como un sistema de dos partculas y no una sola), est la fuerza delpeso sobre cada una y se vi en aquel caso que el torque causado por elpeso es el que determina la dinmica del sistema.
2.3. MOMENTO ANGULAR Y TORQUE Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
41/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 49
2.3.3. Momento angular y torque asociado a sistema continuo
2.3.3.1. Una barra masiva
a
Ra
g
Figura 2.9: . Unabarra de largoR den-
sidad uniforme =M/R puede girar enun plano vertical en
torno a un punto que
divide a la barra en
una parte de largo a
y otra de largoRa.
Se idealiza una barra como una recta masiva de largoR. Un punto de la barra tiene asociado un ,r= y una velocidad . Un segmento de largo d de labarra tiene masa d por lo que el momento angulardel sistema es
O=
Raa
d=kR3
R23Ra + 3a2
Ya que el peso de un elemento d de la barra es cossing d , el torque esO=
Raa
cossing d= kg sinR2
(R2a)
De aqui que la ecuacin dinmica sea
= 3g2
R2aR23Ra + 3a2sin (2.3.35)
Si R >2adebiera ser claro que este pndulo oscila en
torno a=0. En cambio si R
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
42/184
50 P. Cordero S. & R. Soto B.
X
Yr
P
O
g
A
B
Figura 2.10: Un alambre semicircunferencial de radio R y masa total M oscila como pndulo entorno al punto O. Un punto arbitrario P del arco se puede definir con respecto al ngulo con el
eje fijo X o bien con el ngulo = 2 +
que subtiende el arco AP. Para P fijo en el arco, el
nguloes una constante y el movimiento pendular implica = .
La contribucin al torque del arco ds en torno a Pdebida al peso de eseelemento de arco es d= (R) ((dm)g) =(Md)gRsinkdebido a que= cos sin. Para integrar se debe tomar en cuenta que sin =sinsin coscospor lo que0 sind =2sin. De esto resulta queal integrar sobrese obtiene
= 2MgR
sink
La ecuacin=para pndulo extendido se reduce a
= gR
sin (2.3.36)
2.4. Sistemas de dos partculas: masa reducida
En general las ecuaciones para un sistema de dos partculas se puedeescribir
m1 d2
r1dt2
= F12+f1 (2.4.1)
m2d2r2dt2
= F12+f2 (2.4.2)
Ya se sabe que la suma de ambas ecuaciones da la dinmica del centrode masa, ecuacin (2.2.12).
2.4. SISTEMAS DE DOS PARTCULAS: MASA REDUCIDA Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
43/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 51
Si se define el vector de posicin relativa y lamasa reducidapor
=r1r2= 12 , = m1 m2m1+ m2
(2.4.3)
entonces la ecuacin (2.4.1) multiplicada por m2/(m1+ m2)queda
+r2
=
m2
m1+ m2
F12+f1
(2.4.4)
si a esta ecuacin se le suma (2.4.2) multiplicada porm1/(m1+ m2) seobtiene
=F12
+ m2
m1+ m2f
1 m1
m1+ m2f
2 (2.4.5)
Esta ecuacin es equivalente a la ecuacin de una sola partcula de masay posicin .
El problema de dos partculas se reduce al problema del movi-miento del centro de masa y a la ecuacin (2.4.5) para el movimientorelativo.
En el caso usual en quefa= magla ecuacin anterior se reduce a
= F12 caso especial (2.4.6)
que es una ecuacin en la que no interviene sino las fuerza entre las par-tculas.
El momento angular con respecto aGpuede tambin ser escrito usando y la masa reducida . Para lograrlo se debe observar primero que ,1y2son paralelos y satisfacen
1=
m1 ,
2=
m2 (2.4.7)
Entonces
G = m11 1+ m22 2= (2.4.8)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
44/184
52 P. Cordero S. & R. Soto B.
2.5. Fuerzas centrales
2.5.1. La idea
Una fuerza se dice central, con centro en el punto O, si el valor de estafuerza en un puntores
F= f(r) r (2.5.1)
donderes el vector posicin desde Odel punto donde se define la fuerza,r= ry r=r/r. La magnitud f(r) = f(r,,)de la fuerza es una funcinescalar cualquiera que en los casos ms importantes solo depende del
escalar r.Como pronto se ver, importantes fuerzas de la naturaleza son centra-les, tales como la que describe la Ley de Gravitaciny tambin la Ley deCoulombentre cargas elctricas. En ambos casos fsolo depende de r(nodepende ni deni de), en cambio en el ejemplo del pndulo recin des-crito, la tensin del hilo es una fuerza con centro en el punto fijo al techoque tambin depende del ngulo.
El torque O, en el caso en que la fuerza total sobre una partcula es unafuerza central, es nulo, porque O=r (f(r)r) =0ya que se trata del pro-ducto cruz entre dos vectores paralelos. De esto y de (2.3.5) se concluye
que en un caso as ddt
=0 (2.5.2)
es decir, el momento angular permanece constante, (t) = 0.
Pero si es constante, y puesto que= rp, el plano que definen losvectoresry ppermanece fijo, es decir, el movimiento trascurre en un planofijo.
Resumen: si la fuerza total sobre una partcula es una fuerza central, concentro en O, el momento angular Oes constante en el tiempo y el movi-
miento es plano.
2.5.2. Corolario: segunda ley de Kepler.
2.5. FUERZAS CENTRALES Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
45/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 53
S S1 2
Figura 2.11: Si el momento angular seconserva, entonces reas barridas en tiem-pos iguales son iguales.
Veremos que si se conserva el mo-
mento angular, la lnea que une alpunto Ocon el punto que define elvector posicinr(t)barre reas igua-les en tiempos iguales. Para demos-trarlo hay que recordar que si se tienedos vectoresa y bdefinidos a partirde O, la magnitud del producto abes igual al rea del paralelgramoque definenayb. Si la posicin de lapartcula en un instante tes r(t), en un pequeo instante posteriort+esr(t+) =r(t)+ dr
dt=r(t)+v (t). El rea barrida en este lapso infinitesimal
es la mitad del rea del paralelgramo (porque es el rea de un tringu-lo), es decir, esta rea infinitesimal vale dS = 1
2r(t) (r(t) + v (t)) que
resulta ser dS = 2r(t)v (t)que es dS =
2m. El infinitesimales un
elemento de tiempo dt, y de aqu que la conclusin sea que
dS
dt =2m
(2.5.3)
En palabras, la expresin anterior dice que el rea barrida por r(t)a me-dida que la partcula se mueve en su rbitano depende de ty es pro-porcional a la magnitud del momento angular. Si la expresin anterior seintegra entre dos instantes arbitrarios t1y t2de la historia de la partcula, elresultado es
S12=2m
(t2 t1) (2.5.4)
Es decir, el tiempos iguales(t2 t1)se barren reas iguales S12.
2.6. Problemas
2.1 Considere el movimiento de un proyectil lanzado desde (x=0, y =0) convelocidad inicialv= ( cos+ j sin) v0 y aceleracin de gravedadg= g j.a)Determine la trayectoriay(x), la rapidezv(t)en todo momento y el vector
tangente unitariot. b)Si el proyectil ha sido lanzado desde la base de un
plano inclinado (ngulo y< ), determine el ngulo ptimo para que
el proyectil golpee al plano lo ms lejos posible.
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
46/184
54 P. Cordero S. & R. Soto B.
2.2 Una cuerpo comienza su movimiento (sin roce) desde la cspide de unaesfera fija de radio R con rapidez v0. Determinar dnde el cuerpo pierdecontacto con la esfera.
2.3 Por un riel circunferencial en posicin ho-rizontal de radio R avanza un cuerpo C1de masam1arrastrando a un cuerpoC2 de
masam2con un hilo de largoR
2. El cuer-
poC1 es movido por una fuerza de magni-
.
1
2
F
tudF conocida y fija que es siempre tangencial a la circunferencia. En el
instante t=0 los cuerpos parten desde el reposo y en t0 completan una
vuelta. a) Calcule la tensin del hilo en ese intervalo. b) En el instante t0se corta el hilo y sobreC1 continua actuando la misma fuerza. Obtenga el
instantet1 en el cualC1 alcanza aC2.
2.4 En una vara horizontal de largo D hay unanillo de masam1 que puede deslizar por
la vara sin roce alguno. De este anillo sa-
le un hilo en cuyo extremo pende un punto
de masam2, es decir, se tiene un pndulo
simple que no tiene un punto fijo, sino que
ste desliza en una vara horizontal. Encon-
trar una expresin para la tensin del hilo
en funcin del nguloy de.
.
m1
m2
2.5 En la situacin de la figura se tiene unarueda de masa total M y radio R0 enfren-
tando un peldao de altura a. Determine
la mnima fuerza horizontalFque se debe
aplicar para que la rueda supere al pelda-
o.
.F
a
R0
2.6 Una partculaP de masam se mueve por la superficie interior de un conode eje vertical, nguloy vrtice abajo. Si sobreP actua una fuerza que,
expresada en coordenadas esfricas, esF= rr, determine las ecuacio-nes de movimiento deP en coordenadas esfricas y obtenga una expresin
para su velocidad. Datos iniciales:r(0) =R0, (0) =,r(0) =0.
2.6. PROBLEMAS Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
47/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 55
2.7 Resuelva el caso de una argolla de masa m en
una varilla que gira con velocidad angular uniforme:= siempre formando un ngulocon la vertical.
No hay roce entre ambos. Tome como condiciones
iniciales quez(0) =z0 y quez(0) =0. Si la varilla gi-
ra muy lentamente la argolla cae haciaO. Describa
todas las situaciones posibles, desde velocidad an-
gular muy pequea hasta muy grande y escriba el
valor de la velocidad angular crtica para decidir si
cae o sube.
.
g
z
O
m
Indicacin: usando coordenadas cilndricas se puede ver que la varilla apunta en la
direccin unitariot= kcos+ sin. La fuerza total es la suma del peso, mgky lafuerza normal, que inicialmente se debe escribir con un vector general perpendicular
at. Demuestre que la fuerza normal entonces es de la forma: N= N+ (ksin cos)Nn. Una vez que se tiene las fuerzas, la ecuacin de movimiento (II ley de
Newton) puede ser escrita y descompuesta en tres ecuaciones escalares. Hay que
tomar en cuenta que la argolla solo se puede mover a lo largo de la varilla, es
decir, siempre se debe satisfacer(t) =z(t)tan(*). En estas ecuaciones escalares
aparecen las cantidades desconocidasNny N, pero si se usa (*) se puede obtener
una ecuacin libre de estos coeficientes. Tal ecuacin entonces se puede integrar y
se obtienez(t). A partir de ah el problema es muy sencillo.
2.8 Desde el punto de vista del momento angular estudie el pndulo cnicodescrito en la seccin 2.3.1.1. Haga su estudio en dos casos: (a) cuando el
origenOpara definir el momento angular y el torque est al centro de la cir-
cunferencia que describe la partcula y (b) cuandoOse escoge en el punto
en que el hilo se une al techo. En ambos casos escriba el vector posicin de
la masam usando los vectores unitarios asociados a coordenadas cnica,
obtenga la velocidad, calcule el momento angular y el torque y compruebe
que (2.3.5) se satisface.
2.9 Resuelva el caso de un pndulo como aquel vesto en 2.3.3.2 tan soloque, en lugar de un alambre semicircunferencial, se trata de una lminasemicircular con densidad de rea uniforme tal que la masa total seaM. Eneste caso se debe integrar sobre el elemento de readS = d d.
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
48/184
56 P. Cordero S. & R. Soto B.
2.10 Considere un alambre semicircunferen-
cial, de radio R y densidad uniforme, queosciladebido a su pesoen su propioplano, en torno a su punto medioO. Pue-de ser conveniente describir la posicinrde cada punto P del arco como la sumadel vectorRcque va desdeOhasta el cen-tro de curvaturaC, ms un vector que vadesdeChasta el puntoP.
. g
O
XA
B
C
Y
Pr
Rc
2.11 Hay un hilo enrollado alrededor de un ci-lindro. El eje del cilindro es horizontal, su
radio esR y la altura desde el suelo al eje
esL. En el instante inicial est desenrolla-
da una parte del hilo, de longitudD, la quese mantiene tirante y horizontal,=0. En
esa punta del hilo hay un cuerpo de masa
m. Este cuerpo se suelta desde el reposo
y a medida que cae el hilo se va enrollan-
do.a) Determine la tensin del hilo como
funcin del ngulo. b)D la forma de la
aceleracin y determine el radio de curva-
tura. Interprete.
.
R
Lm
P
Indicacin: Conviene tomar el origen en el eje del cilindro y escribir el vector posicin
del cuerpo como la suma de los vectores posicin del punto P de tangencia del hilo
(rPen la direccin) y el vector que apunta en la direccin del hilo y que es tangenteal cilindro, en la direccin .
2.12 Un astronauta de masam se aleja de su nave unido a ella por una cuerda,pero impulsado por sus propios cohetes. Debido a que se le acaba el com-
bustible debe ser trado de vuelta recogiendo la cuerda. Esto se comienza a
hacer cuando la cuerda est tirante, tiene una longitud extendidaR0 desde
la nave y la velocidad angular del astronauta, respecto a la nave, es0. La
cuerda comienza a ser recogida con rapidez constantev0. Suponga que no
hay complicacin alguna en el momento de comenzar a recoger la cuerda.
a)Encuentre la rapidez del astronauta en funcin de la distancia a la nave.
b)Si se sabe que la cuerda soporta una tensin mxima27 m R02
0 antesde cortarse, determine a qu distancia de la nave se encuentra el astronau-
ta en el momento en que la cuerda se corta. Nota: la nave tiene masa tan
grande que para todos los efectos de este problema puede tomarse como
un punto fijo.
2.13 Un pndulo plano de largo R y masa m es liberado desde su punto ms
2.6. PROBLEMAS Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
49/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 57
bajo (=0) con una velocidad angular0. No alcanza a llegar a la cspide
(altura 2Rmedida desde el punto ms bajo) porque cuando toma el valorMel movimiento deja de ser circunferencial. Obtenga una expresin para
cosMen funcin dem,g,0 yR.
2.14 Sobre un plano horizontal est apoyadauna cua de masa M y sobre la cua
hay un cuerpo de masam. Despreciando
todos los roces, determine el movimien-
to de este sistema si inicialmente ambos
cuerpos estn en reposo.
resorte (k,Do)
ma g
comentado porque no
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
50/184
58 P. Cordero S. & R. Soto B.
2.6. PROBLEMAS Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
51/184
Captulo 3
Fuerzas especficas y
movimiento
3.1. Ley de Gravitacin Universal
3.1.1. La ley
La tercera ley de Kepler dice que el cubo dela distancia media,R, de un planeta dividida por el cuadrado de su perodo,T, es la misma constante para todos los planetas, es decir para cualquierplaneta ael cuociente
R3a
T2a=k
da un valor k que no depen-de del planeta. Kepler estable-ci que las rbitas son elipses.Tambin estableci la ley (2.5.3)
que sabemos que significa queel momento angular se conser-va.
Kepler enunci sus dos primeras leyes en
1609, mientras que la tercera es de diez aos
despus, 1619. Isaac Newton se bas en la
tercera ley de Kepler para afirmar en 1666
que existe una fuerza de atraccin gravitacio-
nal que es proporcional al inverso del cuadra-do de la distancia entre los dos cuerpos.
Esto ltimo sugiere que la dinmica de los planetas est gobernada poruna fuerza central. Si la fuerza es central de la forma f(r)r, la nica acele-racin que sufren los planetas es la centrpeta, descrita en (1.4.12). Qu
59
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
52/184
60 P. Cordero S. & R. Soto B.
forma tiene tal ley de fuerza?
Aun cuando los planetas se mueven en rbitas elpticas, stas son muypoco excntricas, es decir, son casi circunferenciales. La velocidad mediadel planetaaes prcticamente su velocidad real todo el tiempo, y se puedeestimar dividiendo el camino recorrido en una rbita:2Rapor el tiempo Taque tarda, es decir, Va=2Ra/Ta. Se sabe, ver (1.4.12), que la aceleracincentrpetaa(a)c es de magnitud V2a/Ra,
a(a)c =
1
Ra
2Ra
Ta
2=
42RaT2a
=42
R2a
R3a
T2a=
42k
R2a(3.1.1)
Con la ltima expresin a la derecha se ha podido escribir la aceleracincentrpeta en trminos tan solo de la constante42ky de la distancia alcentro de fuerza (distancia al sol). Por tanto, la magnitud de la fuerza sobreel planeta atiene que estar dada por esta aceleracin multiplicada por lamasa del planeta y tiene que apuntar hacia el centro,
Fa= 42k Ma
R2ar (3.1.2)
El planeta Jpiter tiene muchas lunas y ese sistema se comporta como unsistema solar autnomo. Cuando se estudi si la ley de Kepler (3.1.1) se
cumpla para ese sistema se obtuvo que se cumple, pero la constante kqueresulta es otra. Hoy sabemos, gracias a la ley de gravitacin universal deNewton, que esa constante kes proporcional a la masa del objeto masivoque crea la fuerza central (el sol en un caso y Jpiter en el otro).
El argumento dado al comienzo, en torno a (3.1.1), tiene sentido tan solosi la rbita es circunferencial o muy prxima a serlo. Pero la conclusin deese caso particular, ayuda a entender cmo se puede llegar a concebir laley de validez universal que ahora se introduce.
La ley universal de gravitacin enunciada por Newton dice que la fuerza de
atraccin que ejerce un punto material de masa mAsobre un punto materialde masamBes
Fsobre B= GmA mB
r2ABr (3.1.3)
donderes el vector unitario que apunta desde el centro Ade fuerza ha-cia B.
3.1. LEY DE GRAVITACIN UNIVERSAL Facultad de Ciencias Fsicas y Matemticas
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
53/184
versin (preliminar) del 7 de marzo de 2009 Mecnica 61
La constante universal de gravitacin Gvale
G=6,671011Nm2
K2 (3.1.4)
O
A
BB
r rA
Figura 3.1:La fuerza de atraccingravitacional que A ejerce sobre Bes paralela arBrA.
Esta misma ley se puede tambin escribirutilizando vectores posicinrAy rBrespec-to a cualquier origen O. La fuerza sobre Bdebido aAes
FBA= G mA mB
rB rA3 (rB rA) (3.1.5)
El movimiento que se deduce con estafuerza, en particular el movimiento plane-tario, ser discutido ms adelante.
3.1.2. Aceleracin de gravedad
De acuerdo a (3.1.3) la magnitud de la fuer-za que la Tierra ejerce sobre un cuerpo demasa mes
F= G M m
(R + h)2 (3.1.6)
donde Mes la masa de la Tierra, Res su radio al nivel del mar y hesla altura sobre el nivel del mar que est el cuerpo de masa m. Siemprese identifica esta fuerza con el productom gh, por tanto, la aceleracin degravedad resulta valer
gh= G M
(R + h)2=
GM
R21 + h
R
2 G MR2 11 +2hR
=G M
R2
1
2h
R
(3.1.7)
que depende de la altura h. En el calculo anterior se ha supuesto que laaltura hes mucho menor que el radio de la Tierra, h R. El radio de la
Tierra es R=6,37106m lo que garantiza que la aproximacin hecha es
excelente aun si hes la altura del monte Everest (hEverest 8,8103m).
Se llamarg0a la aceleracin de gravedad al nivel del mar. Puesto que la
masa de la Tierra es M=5,981024 Kg , resulta
g0=G M
R2 =9,8
m
s2 (3.1.8)
Universidad de Chile Escuela de Ingeniera y Ciencias
-
7/26/2019 Notas de Clase Fsica Mecnica-Uchile CeC
54/184
62 P. Cordero S. & R. Soto B.
El semieje mayor de la rbita terrestre vale a 1,5 1011Km.
Demuestre que la aceleracin de gravedad en Santiago difiere en menos del
1 % deg0.
3.2. Fuerza elstica ideal
3.2.1. Generalidades
P
k
rA
r
A
D(t)
Figura 3.2: Un resorte con un extremo enAtiene en su otro extremoP una masam.
El tipo de problemas que se va aabordar en esta seccin tiene un gra-
do de aplicabilidad que va muchoms all de lo que podra aparentar.Superficialmente esta seccin tratade una partcula de masa men el ex-tremo