Parametros de Motor C.D.
13
Instituto Politécnico Nacional Unidad Profesional Interdisciplinaria en Ingeniería y Tecnologías Avanzadas Máquinas Eléctricas Práctica 4 Parámetros de Motor de C.D. Profesor: Puriel Gil Guillermo Alumnos: De La Rosa González Alexis Alberto Hernández Nava Sergio Grupo: 2MV7 Práctica 4: Parámetros de Motor de C.D.
-
Upload
alex-mustaine -
Category
Documents
-
view
241 -
download
3
description
Maquinas Eléctricas
Transcript of Parametros de Motor C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
Máquinas Eléctricas
Práctica 4
Parámetros de Motor de C.D.
Profesor: Puriel Gil Guillermo
Alumnos:
De La Rosa González Alexis AlbertoHernández Nava Sergio
Grupo: 2MV7
21 DE FEBRERO DEL 2015
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
INDICE
Objetivo
Introducción
Materiales
Marco Teórico
Desarrollo
Conclusiones
OBJETIVO
Obtener los parámetros de un motor de corriente directa como lo son Ra, Ia, Kb, Ki, J y B, mediante el procedimiento visto en clase.
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
INTRODUCCIÓNLos motores excitados con corriente continua (con escobillas, sin escobillas - brushless - y paso
a paso) fueron de los primeros en incluirse en servosistemas por su estabilidad, comportamiento lineal y la exigencia de excitadores electrónicos (drivers) relativamente sencillos. Razones por las que siguen manteniéndose frente a los intentos de desplazamiento en el mercado por parte de los motores de corriente alterna (AC).Los motores de continua con escobillas más antiguos disponían de dos devanados, uno inductor o decampo (que permitía regular la densidad de flujo magnético) y otro inducido o de armadura (regulador de la corriente por el bobinado sometido a la acción del campo inductor). La sustitución del devanado decampo por un imán permanente, Permanent Magnet,(Motores DC PM) supuso importantes avances: reducción del diámetro del estator y con él las pérdidas magnéticas. Tal reducción se hizo extensible al rotor con lo que se redujo la inercia del mismo mejorando los tiempos de respuesta mecánica del conjunto. No obstante, los mayores inconvenientes de los motores DC PM (en adelante motores DC) giran en torno a las pérdidas producidas por las escobillas y del ruido de baja frecuencia generado tras su puesta en funcionamiento.
MATERIALES-Motor de C.D.-3 puntas de osciloscopio-4 puntas banana-caimán-2 resistencias de 1MΩ-1 resistencia de 6.8Ω-1 resistencia de 33Ω-2 resistencias de 11Ω-Transistor Q2N3904-Transistor 2N3055-Fuente de alimentación-Osciloscopio -Generador de Funciones-Protoboard
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
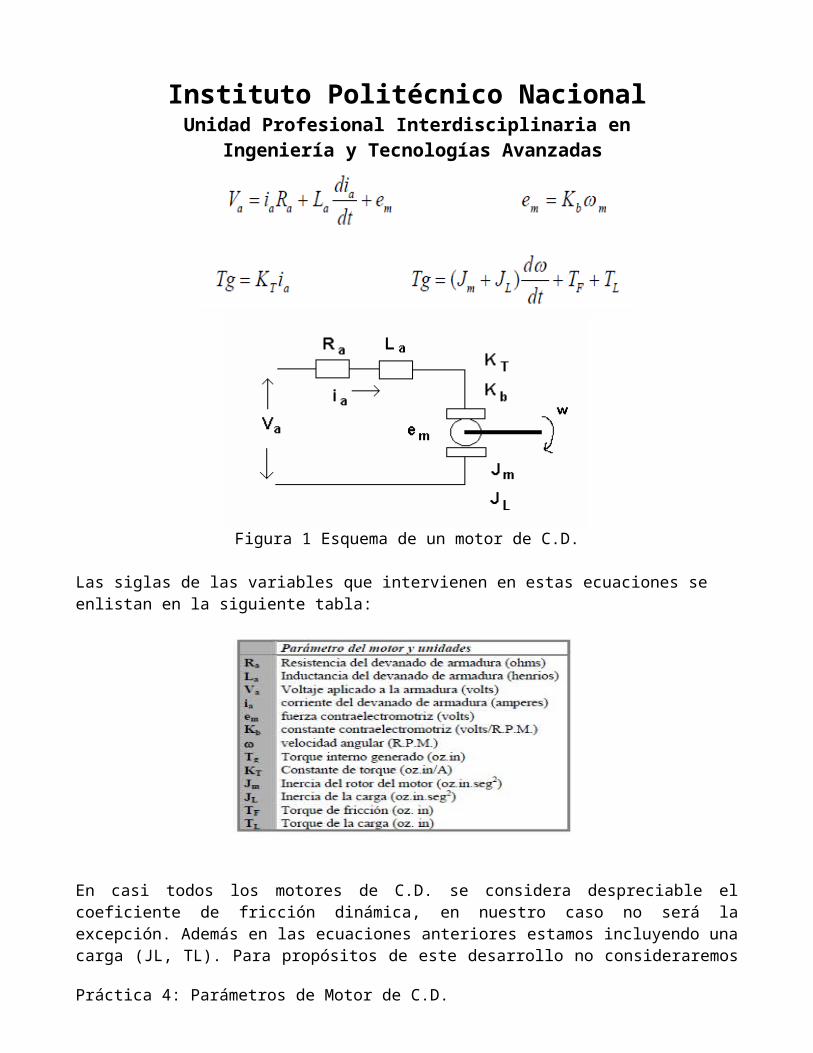
MARCO TEÓRICOUn motor de C.D. controlado por armadura o controlado por inducido, se puede representar esque-máticamente como se ilustra en la figura 1. En la figura Ra y La representan la resistencia del devana-do de armadura y la inductancia del mismo. Las ecuaciones simplificadas referidas a esta figura las describimos a continuación:
Figura 1 Esquema de un motor de C.D.
Las siglas de las variables que intervienen en estas ecuaciones se enlistan en la siguiente tabla:
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
En casi todos los motores de C.D. se considera despreciable el coeficiente de fricción dinámica, en nuestro caso no será la excepción. Además en las ecuaciones anteriores estamos incluyendo una carga (JL, TL). Para propósitos de este desarrollo no consideraremos esta carga. Así entonces la ecuación última toma la siguiente forma:
τ g=Jdωdt
+Bω
El torque Bω representa la fricción estática que existe entre el rotor y las escobillas del motor; se le debe considerar debido a que si no se vence esta fuerza mecánica, el motor no girará. Esto generará una no linealidad denominada zona muerta. En el caso de un control de velocidad no es tan importante, sin embargo para un control de posición juega un papel crucial. Esta fricción será vencida con un voltaje pequeño que se le inyecta al motor en el devanado de armadura.
Considerando el conjunto de ecuaciones, los parámetros que deben ser encontrados para caracterizar a un motor específico son los siguientes:
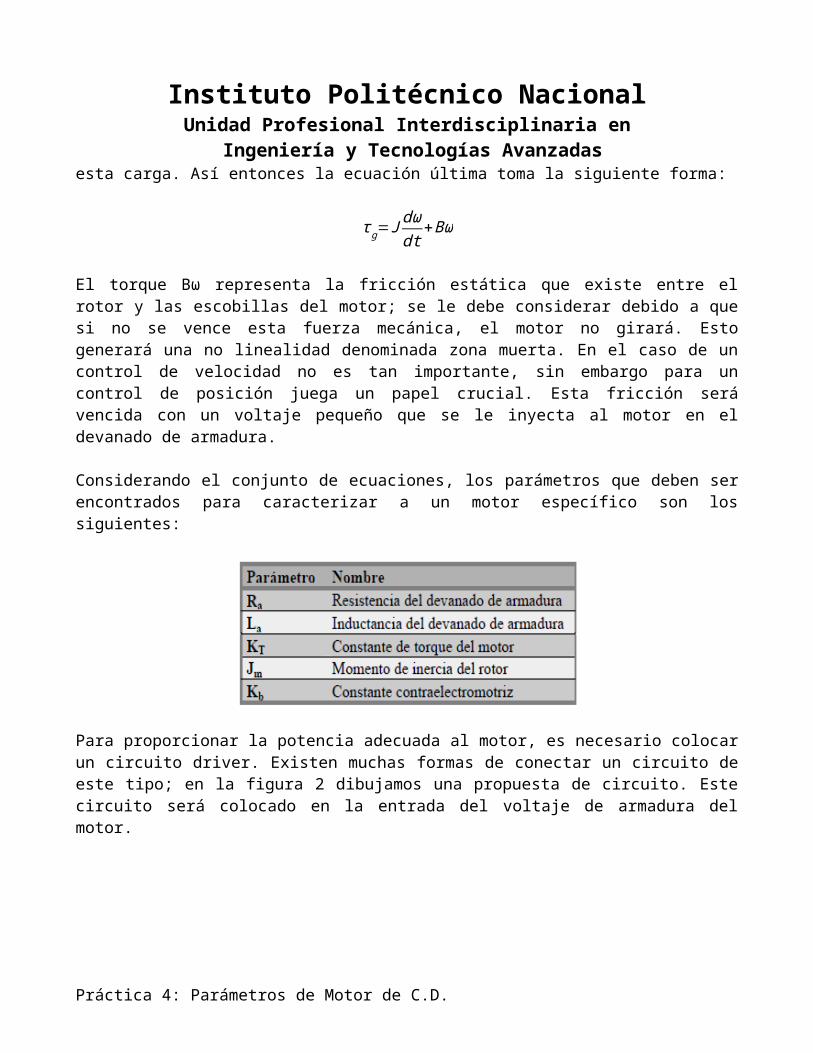
Para proporcionar la potencia adecuada al motor, es necesario colocar un circuito driver. Existen muchas formas de conectar un circuito de este tipo; en la figura 2 dibujamos una propuesta de circuito. Este circuito será colocado en la entrada del voltaje de armadura del motor.
Figura 2 Circuito driver para manejar el motor de C.D.
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
DESARROLLO
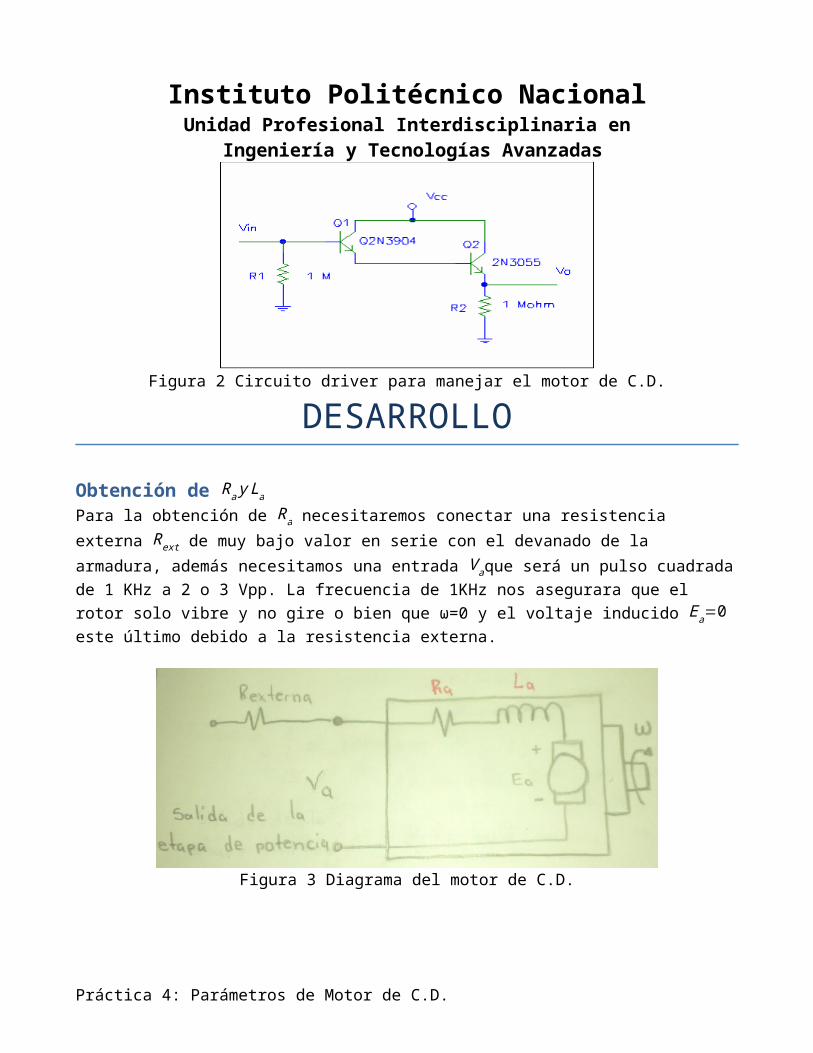
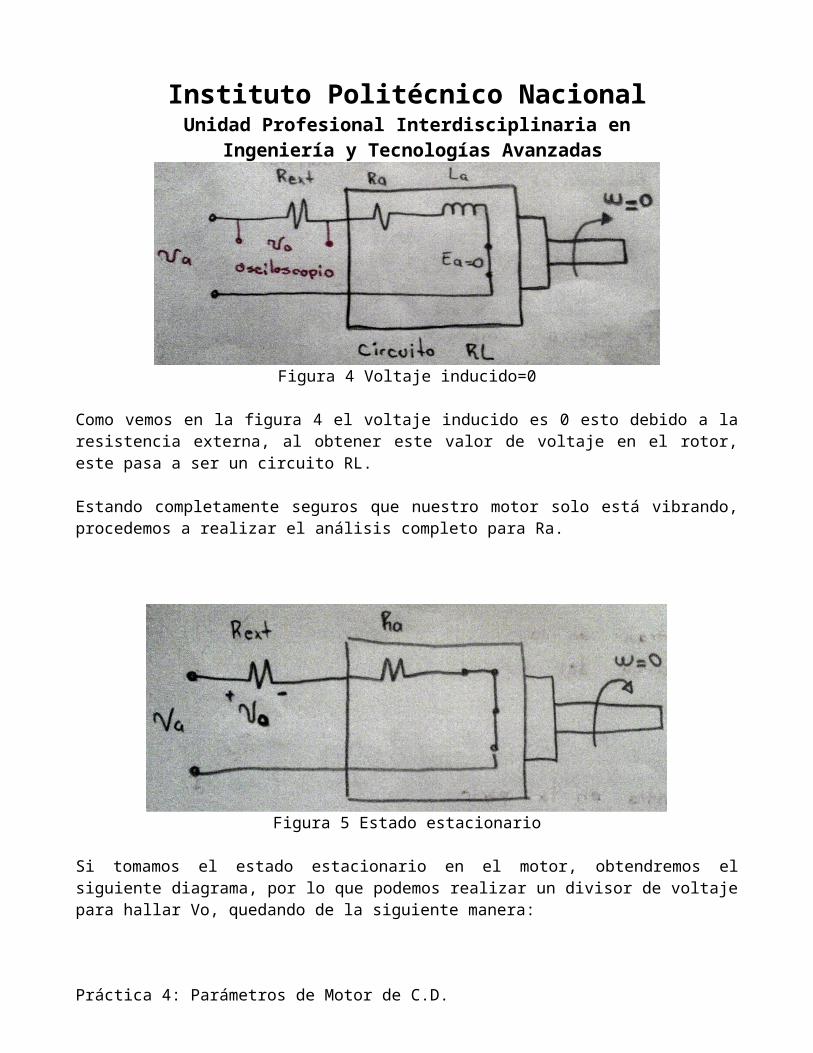
Obtención de Ra y LaPara la obtención de Ra necesitaremos conectar una resistencia externa Rext de muy bajo valor en serie con el devanado de la armadura, además necesitamos una entrada V aque será un pulso cuadrada de 1 KHz a 2 o 3 Vpp. La frecuencia de 1KHz nos asegurara que el rotor solo vibre y no gire o bien que ω=0 y el voltaje inducido Ea=0este último debido a la resistencia externa.
Figura 3 Diagrama del motor de C.D.
Figura 4 Voltaje inducido=0
Como vemos en la figura 4 el voltaje inducido es 0 esto debido a la resistencia externa, al obtener este valor de voltaje en el rotor, este pasa a ser un circuito RL.
Estando completamente seguros que nuestro motor solo está vibrando, procedemos a realizar el análisis completo para Ra.
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
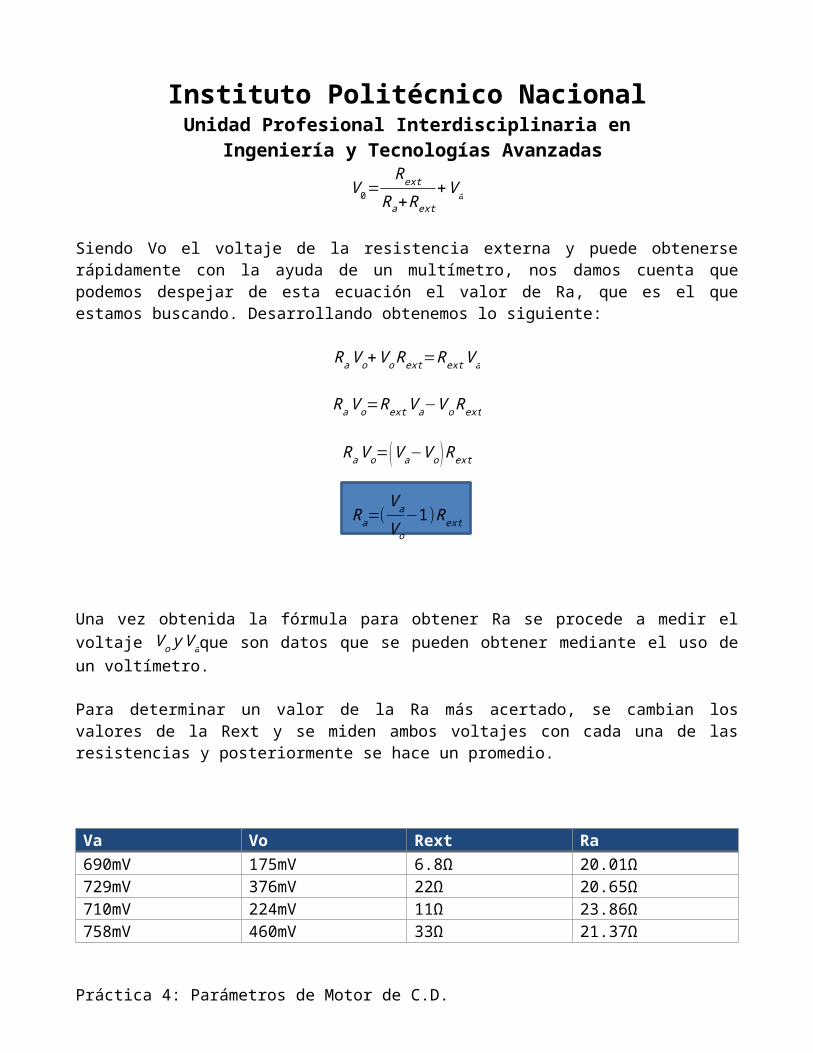
Figura 5 Estado estacionario
Si tomamos el estado estacionario en el motor, obtendremos el siguiente diagrama, por lo que podemos realizar un divisor de voltaje para hallar Vo, quedando de la siguiente manera:
V 0=Rext
Ra+Rext+V a
Siendo Vo el voltaje de la resistencia externa y puede obtenerse rápidamente con la ayuda de un multímetro, nos damos cuenta que podemos despejar de esta ecuación el valor de Ra, que es el que estamos buscando. Desarrollando obtenemos lo siguiente:
RaV o+V oRext=RextV a
RaV o=R extV a−V o Rext
RaV o=(V a−V o )Rext
Ra=(V aV o
−1)Rext
Una vez obtenida la fórmula para obtener Ra se procede a medir el voltaje V o y V aque son datos que se pueden obtener mediante el uso de un voltímetro.
Para determinar un valor de la Ra más acertado, se cambian los valores de la Rext y se miden ambos voltajes con cada una de las resistencias y posteriormente se hace un promedio.
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
Va Vo Rext Ra690mV 175mV 6.8Ω 20.01Ω729mV 376mV 22Ω 20.65Ω710mV 224mV 11Ω 23.86Ω758mV 460mV 33Ω 21.37Ω
Dando como promedio:
Ra=21.47Ω
Ahora para la obtención de La debemos de tener en cuenta que la constante τ de carga y descarga es igual a:
τ=LR
Siendo R la resistencia total, sabemos que es igual a:
R=Ra+Rext
Entonces:
τ=La
Ra+RextPor lo tanto:
La=(Ra+Rext)τ
Ahora, sabemos que el tiempo total de carga es 5 veces τ , por lo que necesitamos la gráfica de tiempo de carga, la cual obtendremos con la ayuda de un osciloscopio.
Tenemos que 5 τ es 99% de la carga, a partir de ahí, el porcentaje de carga ira disminuyendo hasta tener que τ=63 %de la carga, por lo que a manera de inspección debemos determinar el valor de τ .
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
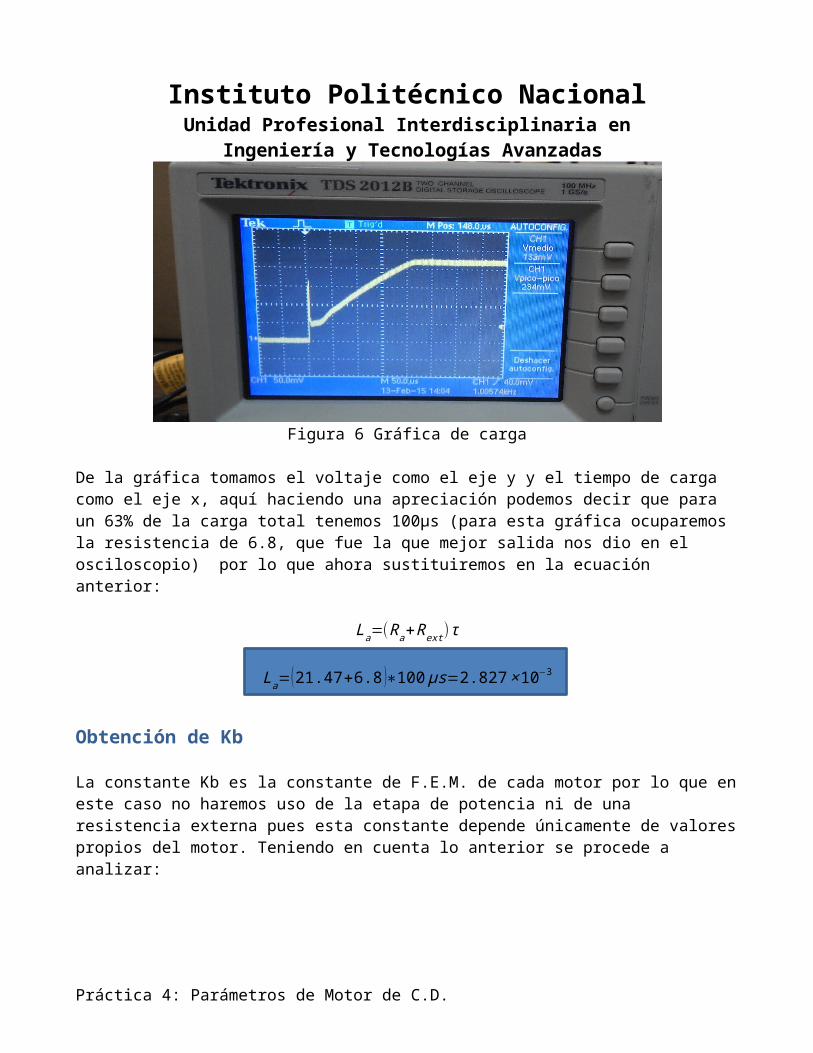
Figura 6 Gráfica de carga
De la gráfica tomamos el voltaje como el eje y y el tiempo de carga como el eje x, aquí haciendo una apreciación podemos decir que para un 63% de la carga total tenemos 100µs (para esta gráfica ocuparemos la resistencia de 6.8, que fue la que mejor salida nos dio en el osciloscopio) por lo que ahora sustituiremos en la ecuación anterior:
La=(Ra+Rext)τ
La= (21.47+6.8 )∗100µs=2.827×10−3
Obtención de Kb
La constante Kb es la constante de F.E.M. de cada motor por lo que en este caso no haremos uso de la etapa de potencia ni de una resistencia externa pues esta constante depende únicamente de valores propios del motor. Teniendo en cuenta lo anterior se procede a analizar:
Figura 7 análisis para Kb
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
Teniendo la consideración de que Ea = Kbω y el voltaje en el inductor VL= 0, esto último debido a que el motor ahora estará conectado a corriente directa, haremos el análisis de mallas correspondiente:
V a=Ra I a+Ea
V a=Ra I a+Kbω
Despejando Kb
Kb=V a−Ra I a
ω
Desconocemos ω, para determinar la velocidad del rotor utilizaremos un tacómetro, este detectara la velocidad de la flecha, donde esta tendrá que tener una muesca reflejante que el tacómetro pueda detectar, al igual que hicimos con la resistencia Ra, variaremos los datos de entrada, en este caso el voltaje que va a consumir el motor, haremos 8 pruebas con la única diferencia que para cada voltaje de prueba se invertirá el giro, para finalmente sacar un promedio de todos los datos obtenidos. Para medir la corriente debemos abrir el circuito y cerrarlo con el multímetro.
Va (Volts) Rpm (rads/seg) Ia (Amperes) Kb3 33.19 0.061 0.0513 giro inverso 31.41 0.061 0.0536 83.16 0.058 0.0576 giro inverso 81.05 0.061 0.0589 131.94 0.060 0.0589 giro inverso 130.58 0.060 0.05912 189.62 0.062 0.05612 giro inverso 182.42 0.061 0.059
Por lo que el promedio de todas estas mediciones es:
Kb=0.0563
Práctica 4: Parámetros de Motor de C.D.
Instituto Politécnico NacionalUnidad Profesional Interdisciplinaria en
Ingeniería y Tecnologías Avanzadas
CONCLUSIONESEn este trabajo se presentaron aspectos teóricos relativos a los fundamentos de motores de corriente directa. Esto es importante para entender el principio de funcionamiento de dichos motores y entender su comportamiento. El modelado matemático del motor es importante ya que gracias a este, se puede conocer el comportamiento del mismo ante diferentes condiciones de funcionamiento sin necesidad de tener el sistema físicamente y a partir de ese análisis su pueden encontrar las condiciones para caracterizar el motor, que fue el propósito de esta práctica. También se pretende usar diversas herramientas de simulación con el fin de entender aún mejor su funcionamiento y corroborar nuestros resultados.
Práctica 4: Parámetros de Motor de C.D.