
Presentación de PowerPoint · PDF filefabricantes y lenguajes de programacion de robots...
22
UNIVERSIDAD DON BOSCO Maestría en Manufactura Integrada por Computadora Asignatura: Robótica Integrada a la Manufactura Profesor: Msc. Manuel Cardona Alumno: Ing. Leopoldo Hernández Guevara FABRICANTES Y LENGUAJES DE PROGRAMACION DE ROBOTS INDUSTRIALES Lunes 20 de Octubre de 2014
Transcript of Presentación de PowerPoint · PDF filefabricantes y lenguajes de programacion de robots...

UNIVERSIDAD DON BOSCO
Maestría en Manufactura Integrada por Computadora
Asignatura: Robótica Integrada a la Manufactura
Profesor: Msc. Manuel Cardona
Alumno: Ing. Leopoldo Hernández Guevara
FABRICANTES Y LENGUAJES
DE PROGRAMACION DE
ROBOTS INDUSTRIALES
Lunes 20 de Octubre de 2014

PRINCIPALES FABRICANTES DE
ROBOTS INDUSTRIALES

ABB (acrónimo de Asea Brown Boveri) es una corporación
multinacional, cuya sede central queda en Zurich, Suiza y cuyos
mayores negocios son los de tecnologías en generación de energía
eléctrica y en automatización industrial. ABB opera en más de cien
países y emplea a más de 124.000 personas.
Es importante remarcar que la empresa componente de esta
multinacional, ASEA (con sede en Suecia) fue pionera de la robótica en
el continente Europeo.
ABB posee una de las mayores bases de robótica industrial instalada en
el mundo, suministrando software, equipos periféricos y celdas de
fabricación modular para tareas específicas como soldadura, ensamble,
pintura, empaque y otros. ABB ha instalado más de 200.000 robots en
todo el mundo.

Ejemplos de algunos robots industriales producidos por
ABB:
IRB 120
El robot ABB más pequeño y para muchas aplicaciones
pesa solamente 25 kg y puede manipular hasta 3 kg (4 kg
para la muñeca en posición vertical), con una área de
trabajo de 580 mm

IRB 360 FlexPicker
IRB360 es la segunda
generación del robot para
aplicaciones de pick y
place.
IRB 6660
El IRB 6660 para el
premecanizado es el primer
robot del mercado dedicado
a las aplicaciones de
premecanizado dentro de la
industria de la fundición.

KUKA Roboter GmbH es uno de los principales fabricantes mundiales de
robots industriales y sistemas de soluciones automatizadas de fabricación. El
Grupo KUKA Robot cuenta con más de 25 filiales en todo el mundo, la
mayoría son sucursales de ventas y servicios.
La sede principal de KUKA Roboter GmbH, con más de 3.150 empleados a
nivel global, está en Augsburgo. Los clientes de la empresa son de la industria
automovilística.
La compañía fue fundada en 1898 en Augsburgo, Alemania. Sus fundadores
eran Johann Josef Keller y Jakob Knappich. Al principio se centraron en la
iluminación pública y de casas pero poco después enfocaron su atención en
otras cosas (instalaciones y herramientas de soldadura, envases y
contenedores). En 1966 la empresa fue líder europea en la producción de
vehículos de servicios urbanos.
En 1973 se construyó su primer robot industrial, conocido como FAMULUS,
trabajo pionero en aquella época.

ROBOT FAMULUS DE
KUKA
ROBOT QUANTEC
DE KUKA

Mitsubishi es una de las mayores compañías de Japón. Fue
fundada el 13 de mayo de 1870 por Yataro Iwasaki. Desempeñó un
importante papel en la transformación de Japón en una sociedad
industrializada. Se dedicó en un principio al transporte marítimo. La
marca y el nombre de Mitsubishi, se refieren a 'tres diamantes'. Su
nombre se deriva de las palabras 'mitsu', que significa tres, e 'hishi',
que significa castañas de agua triangulares.
Su filial Mitsubishi Electric, tiene a su cargo el desarrollo de los robots
industriales.
La línea de robots industriales MELFA se ajusta fácilmente a
cualquier combinación de células de fabricación, de alta velocidad y
rendimiento. Tiene una fácil conectividad con PLCs y otros equipos
de Mitsubishi.

FANUC es un grupo de compañías, principalmente FANUC
Corporation (Fanakku Kabushikigaisha) de Japón, Fanuc
America Corporation con sede en Rochester
Hills (Michigan), Estados Unidos, y FANUC Robotics Europe
SA con sede en Luxemburgo, que ofrecen productos y servicios
de automatización industrial como robots y sistemas de control
numérico.
FANUC Robotics America, Inc. es líder en automatización
robótica en Norte y Sudamérica. Ofrece más de 200 variaciones
de modelos de robots que satisfacen una amplia variedad de
aplicaciones. Adicionalmente produce software, controles y
equipos de visión que, en conjunto, ayudan a desarrollar sistemas
robóticos de última generación y tecnología avanzada.



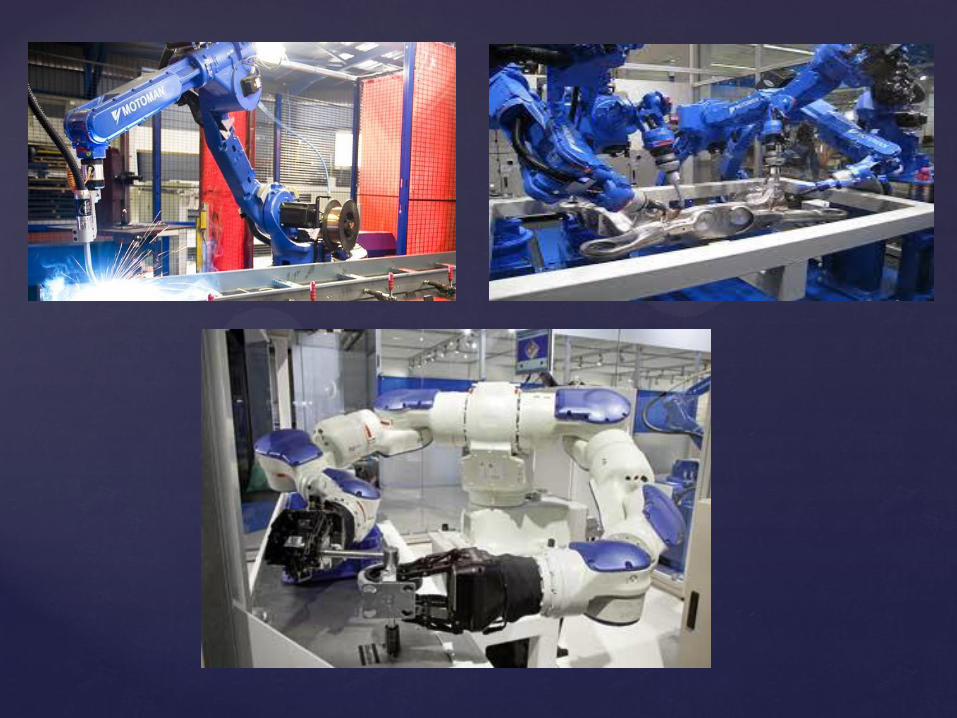
Yaskawa Motoman es una filial estadounidense de la
empresa japonesa Yaskawa Electric Corporation.
Yaskawa Motoman produce automatización robótica para
la industria y aplicaciones robóticas, incluyendo soldadura
de arco, coberturas, dispensación, corte de materiales
(láser, plasma, chorro de agua), manipulación de
materiales, eliminación de materiales y soldadura por
puntos.

OTRAS MARCAS FABRICANTES DE ROBOTS INDUSTRIALES
LENGUAJES DE
PROGRAMACION PARA ROBOTS
INDUSTRIALES

En los robots industriales no existe un lenguaje de
programación generalizado. De hecho, en la
actualidad existen multitud de lenguajes
destinados a la programación de robots
industriales, puesto que en la mayoría de los
casos los propios fabricantes desarrollan el
lenguaje destinado a su robot concreto.
Algunos ejemplos son: VAL, RCL, AL, MAPLE,
RAPT, LAMA, STRIPS… Suelen estar diseñados
para programar un modelo de robot particular y
no pueden emplearse en otros tipos de robots.

Los lenguajes de programación habituales
(PASCAL, LOGO, VISUAL BASIC, C…)
son lenguajes de propósito general, es
decir, pueden emplearse para cualquier
tipo de aplicación y, en particular, en la
programación de robots.
Se utilizan sobre todo en microrrobots y
robots destinados a fines educativos y de
investigación, pero no son muy empleados
en la industria.

VAL fue uno de los primeros lenguajes de robot y
fue utilizado en robots Unimate y PUMA. Las
variantes de VAL han sido utilizados por otros
fabricantes como Adept Technology. Actualmente
Stubli utiliza VAL3.
Programa de ejemplo: LISPT PROGRAM PICKUP 1. APRO PART, 25.0 2. MOVES PART 3. CLOSE, 0.0.0 4. APRO PART, -50.0 5. APRO DROP, 100.0 6. MOVES DROP 7. OPEN, 0.0.0 8. APRO DROP, -100.0 .END

RPL: Aplicado a los robots PUMA, ha sido diseñado por SRI
INTERNATIONAL.
EMILY: Es un lenguaje creado por IBM para el control de uno de sus robots.
SIGLA: Desarrollado por OLIVETTI para su robot SUPER SIGMA.
MAL: Se ha creado en el Politécnico de Milán para el robot SIGMA
RCL: Aplicado al robot PACS y desarrollado por RPI
HELP: Creado por GENERAL ELECTRIC para su robot ALLEGRO y escrito
en PASCAL/FORTRAN.
MAPLE: Creado por IBM para el robot de la misma empresa, tiene
capacidad para soportar informaciones de sensores externos.
PAL: Desarrollado por la Universidad de Purdure para el manipulador de
Stanford, es un intérprete escrito en FORTRAN y Ensamblador, capaz de
aceptar sensores de fuerza y de visión.

Muchas gracias…


















