
Projecte Final de Carrerasauron.etse.urv.es/public/PROPOSTES/pub/pdf/1396pub.pdf · Projecte Final...
74
Projecte Final de Carrera Disseny i construcció d’un prototip de motor lineal de reluctancia autocommutat de doble cara (LSRM) Titulació: Enginyeria Tècnica Industrial en Electricitat Autor: Albert Artells Budesca Director: Jordi Garcia Amorós Data: Abril de 2014
Transcript of Projecte Final de Carrerasauron.etse.urv.es/public/PROPOSTES/pub/pdf/1396pub.pdf · Projecte Final...
Projecte Final de Carrera
Disseny i construcció d’un prototip de
motor lineal de reluctancia autocommutat
de doble cara (LSRM)
Titulació: Enginyeria Tècnica Industrial en Electricitat
Autor: Albert Artells Budesca
Director: Jordi Garcia Amorós
Data: Abril de 2014
Disseny i construcció d’un prototip de LSRM
Índex
Capítol 1: Introducció.................................................................................. 61.1 Antecedents.............................................................................................................. 6
1.2 Objectiu del projecte................................................................................................. 6
1.3 Constitució i principi de funcionament..................................................................... 8
1.4 El motor lineal de reluctància................................................................................... 13
Capítol 2: Disseny i fabricació d’un prototip de LSRM.................................. 16
2.1 Introducció................................................................................................................ 16
2.2 Especificacions de disseny del LSRM....................................................................... 16
2.3 Dimensionat.............................................................................................................. 16
2.4 Parts que componen el LSRM................................................................................... 23
Capítol 3: Assaig i posta en marxa del LSRM................................................ 343.1 Assajos magnètics i mecànics.................................................................................... 34
3.2 Assajos tèrmics.......................................................................................................... 40
3.3 Assajos dinàmics....................................................................................................... 45
3.4 Posta en marxa.......................................................................................................... 48
Capítol 4: Plànols........................................................................................ 50 4.1 Plànols constructius.................................................................................................. 50
Referències bibliogràfiques......................................................................... 51
Annex: Materials utilitzats.......................................................................... 52
Disseny i construcció d’un prototip de LSRM
3
Capítol 1 : Introducció
1.1 Antecedents.
Els accionaments elèctrics lineals (AEL), es poden definir com aquells que són capaços de convertir l’energia elèctrica en energia mecànica de moviment lineal sense necessitat de cap sistema mecànic auxiliar. Els AEL són mecànicament senzills i robustos, fet que comporta un gran avantatge respecte els accionaments elèctrics lineals amb motor rotatiu i sistema mecànic de conversió de moviment. Un altre gran avantatge dels AEL respecte els accionaments hidràulics o pneumàtics, és la facilitat i exactitud en que es pot controlar la posició, força, velocitat i acceleració, mentre que en els altres sistemes pot resultat més complicat i car. Per contra, els AEL tenen un rendiment inferior respecte als accionaments elèctrics rotatius equivalents, i una relació pes potència que es pot veure superada pels accionaments elèctrics rotatius i pels accionament hidràulics i pneumàtics. Una primera classificació dels AEL es podria fer a partir dels conceptes de motor lineal i d’accionament lineal oscil∙lant. La principal diferència entre aquests dos termes és que els accionaments oscil∙lants estan dissenyats per a petits recorreguts i forces no massa grans, per exemple per accionar contactes o electrovàlvules, i en molt casos estan formats per un electroimant d’una sola bobina. Els motors lineals, en canvi estan dissenyats per a recorreguts més grans i forces elevades, i per tant, constructivament seran més complexos. Els AEL es poden classificar segons el principi de funcionament, topologia o tipus de flux magnètic:
‐ AEL segons principi de funcionament: o Corrent continu o Asíncrons o Síncrons o Reluctància autocommutat o Pas a pas
‐ AEL segons topologia o Lineal o Circular
‐ AEL segons flux magnètic o Flux longitudinal o Flux transversal
Actualment, el camp d’aplicació més rellevant dels AEL són la tracció elèctrica per a ferrocarrils i pistons per a maquinaria industrial, servomecanismes de posicionament en màquines eina i manipuladors en cadenes de muntatge.

Disseny i construcció d’un prototip de LSRM
4
En el camp de la tracció elèctrica és on l’impacte del AEL està sent més important, presentant‐se com una gran alternativa als sistemes convencionals d’alta velocitat per rails. Avui dia hi ha una gran implantació de sistemes de transport ferroviaris d’alta velocitat convencionals (roda‐rail), però d’altra banda, els AEL de levitació magnètica s’estan implantant com a sistemes de molt alta velocitat, ja que es poden aconseguir velocitats fins 500 km/h (en aquests moments ja existeixen infraestructures d’aquest tipus en diferents països). El sistema de tracció de levitació magnètica consta d’un motor síncron, on el primari (la part fixa o rail), s’alimenta per seccions mitjançant corrent alterna. El secundari el forma el vehicle. Aquest consta d’electroimants alimentats per bateries, per tant no existeix contacte entre primari i secundari. La funció bàsica dels electroimants del secundari es fer levitar el vehicle i posicionar‐lo lateralment en el rail. El vehicle no te fricció mecànica, excepte la aerodinàmica, de manera que el sistema permet assolir velocitats molt altes. Les bateries es carreguen mitjançant generadors lineals integrats. Una altre exemple del grau de desenvolupament dels AEL és en el camp dels servomecanismes, entre els que es troben els AEL asíncrons, síncrons (imants permanents), reluctància (pas a pas) o inclús la versió lineal del motor de corrent continu amb escombretes.
Fig. 1.1 Accionament lineals fabricats per Baldor Electric Company
1.2 Objectiu del projecte. L’objectiu del present projecte és dissenyar i construir un motor lineal de reluctància commutada de doble cara, en endavant LSRM. En les últimes dècades, els motors de reluctància autocommutats rotatius (SRM) han estat objecte de gran interès, i de mica en mica van trobant el seu lloc en el mercat d’accionaments elèctrics. En canvi, els motors de reluctància autocommutada lineals (LSRM) no han rebut encara l’atenció, que per les seves avantatges respecte altres motors lineals mereixerien. En aquest projecte es proposa el disseny i construcció d’un LSRM de doble cara, per a aplicacions que requereixin per un costat tenir un precís posicionament de la part mòbil, i per l’altra, comptar amb una elevada força durant breus instants de temps, essent a més, una condició indispensable que les dimensions del LSRM siguin el més reduïdes possible.
Disseny i construcció d’un prototip de LSRM
5
1.3 Constitució i principi de funcionament:
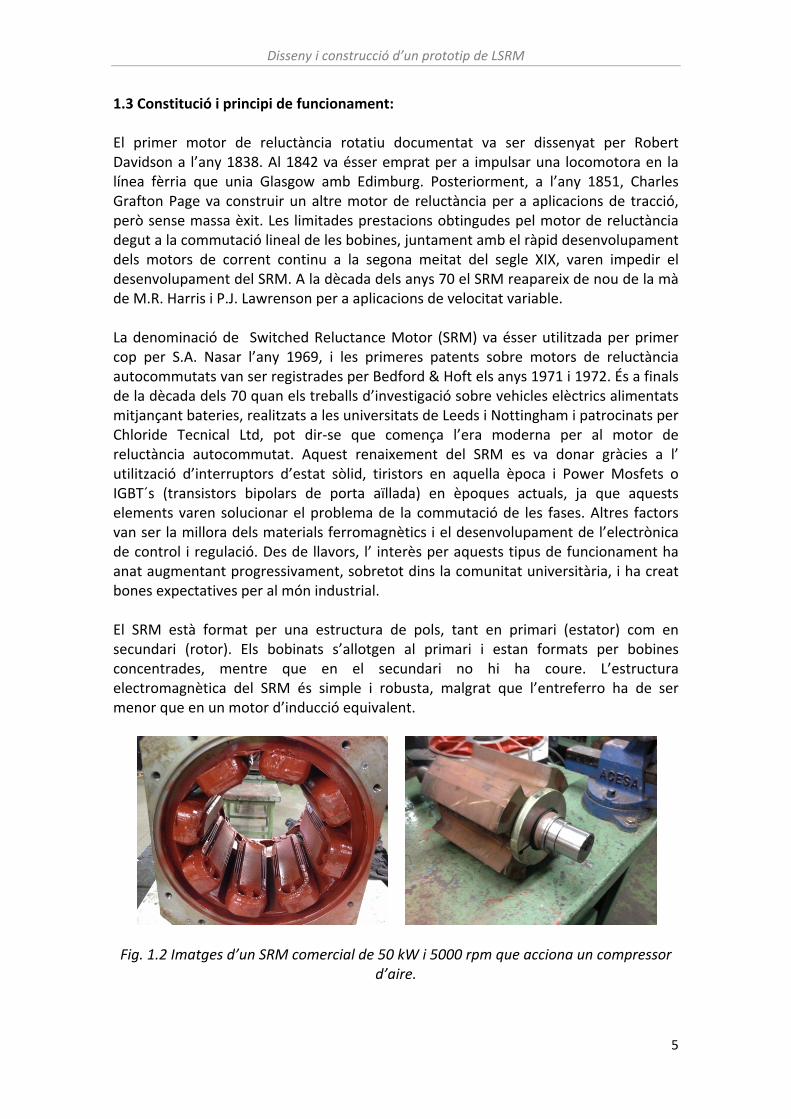
El primer motor de reluctància rotatiu documentat va ser dissenyat per Robert Davidson a l’any 1838. Al 1842 va ésser emprat per a impulsar una locomotora en la línea fèrria que unia Glasgow amb Edimburg. Posteriorment, a l’any 1851, Charles Grafton Page va construir un altre motor de reluctància per a aplicacions de tracció, però sense massa èxit. Les limitades prestacions obtingudes pel motor de reluctància degut a la commutació lineal de les bobines, juntament amb el ràpid desenvolupament dels motors de corrent continu a la segona meitat del segle XIX, varen impedir el desenvolupament del SRM. A la dècada dels anys 70 el SRM reapareix de nou de la mà de M.R. Harris i P.J. Lawrenson per a aplicacions de velocitat variable. La denominació de Switched Reluctance Motor (SRM) va ésser utilitzada per primer cop per S.A. Nasar l’any 1969, i les primeres patents sobre motors de reluctància autocommutats van ser registrades per Bedford & Hoft els anys 1971 i 1972. És a finals de la dècada dels 70 quan els treballs d’investigació sobre vehicles elèctrics alimentats mitjançant bateries, realitzats a les universitats de Leeds i Nottingham i patrocinats per Chloride Tecnical Ltd, pot dir‐se que comença l’era moderna per al motor de reluctància autocommutat. Aquest renaixement del SRM es va donar gràcies a l’ utilització d’interruptors d’estat sòlid, tiristors en aquella època i Power Mosfets o IGBT´s (transistors bipolars de porta aïllada) en èpoques actuals, ja que aquests elements varen solucionar el problema de la commutació de les fases. Altres factors van ser la millora dels materials ferromagnètics i el desenvolupament de l’electrònica de control i regulació. Des de llavors, l’ interès per aquests tipus de funcionament ha anat augmentant progressivament, sobretot dins la comunitat universitària, i ha creat bones expectatives per al món industrial. El SRM està format per una estructura de pols, tant en primari (estator) com en secundari (rotor). Els bobinats s’allotgen al primari i estan formats per bobines concentrades, mentre que en el secundari no hi ha coure. L’estructura electromagnètica del SRM és simple i robusta, malgrat que l’entreferro ha de ser menor que en un motor d’inducció equivalent.
Fig. 1.2 Imatges d’un SRM comercial de 50 kW i 5000 rpm que acciona un compressor
d’aire.
Disseny i construcció d’un prototip de LSRM
6
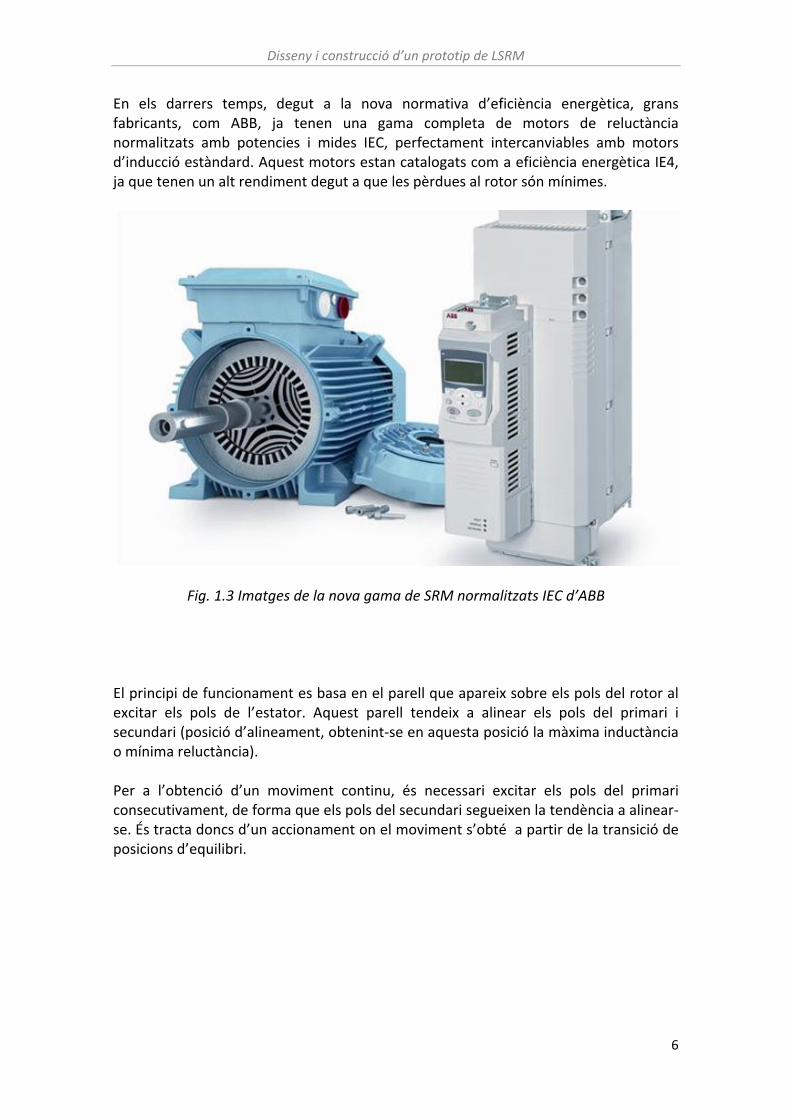
En els darrers temps, degut a la nova normativa d’eficiència energètica, grans fabricants, com ABB, ja tenen una gama completa de motors de reluctància normalitzats amb potencies i mides IEC, perfectament intercanviables amb motors d’inducció estàndard. Aquest motors estan catalogats com a eficiència energètica IE4, ja que tenen un alt rendiment degut a que les pèrdues al rotor són mínimes.
Fig. 1.3 Imatges de la nova gama de SRM normalitzats IEC d’ABB El principi de funcionament es basa en el parell que apareix sobre els pols del rotor al excitar els pols de l’estator. Aquest parell tendeix a alinear els pols del primari i secundari (posició d’alineament, obtenint‐se en aquesta posició la màxima inductància o mínima reluctància). Per a l’obtenció d’un moviment continu, és necessari excitar els pols del primari consecutivament, de forma que els pols del secundari segueixen la tendència a alinear‐se. És tracta doncs d’un accionament on el moviment s’obté a partir de la transició de posicions d’equilibri.
Disseny i construcció d’un prototip de LSRM
7
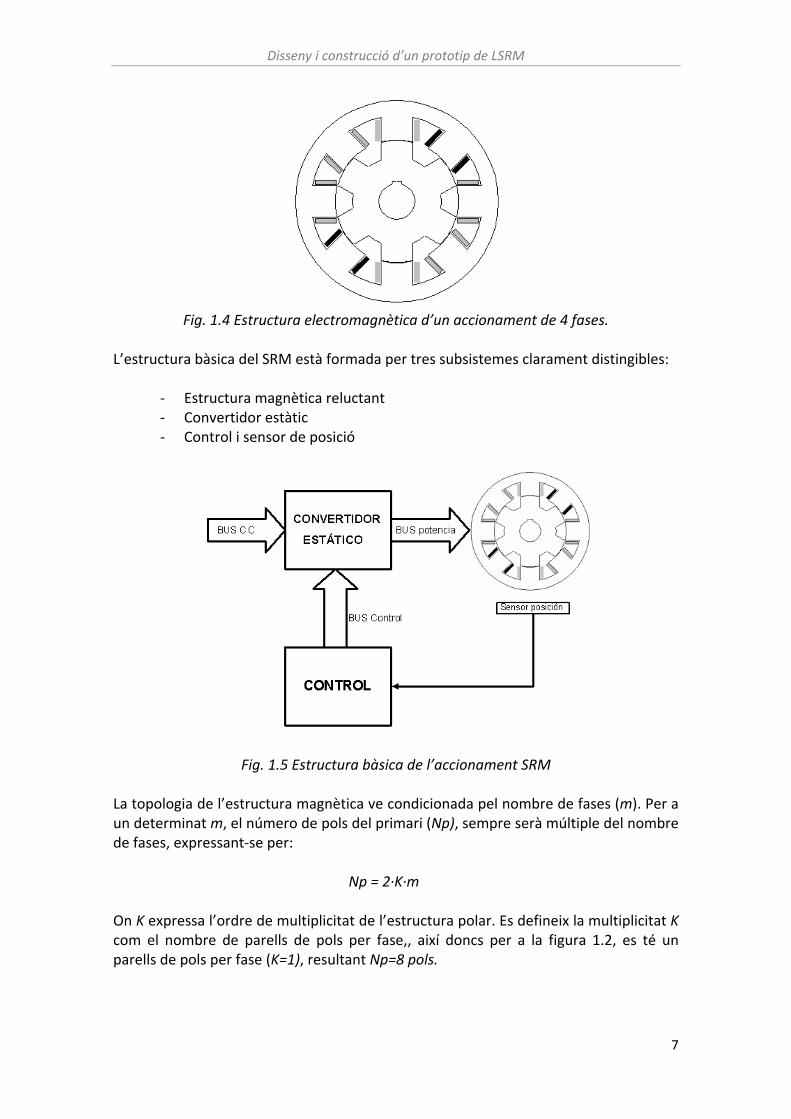
Fig. 1.4 Estructura electromagnètica d’un accionament de 4 fases.
L’estructura bàsica del SRM està formada per tres subsistemes clarament distingibles:
‐ Estructura magnètica reluctant ‐ Convertidor estàtic ‐ Control i sensor de posició
Fig. 1.5 Estructura bàsica de l’accionament SRM La topologia de l’estructura magnètica ve condicionada pel nombre de fases (m). Per a un determinat m, el número de pols del primari (Np), sempre serà múltiple del nombre de fases, expressant‐se per: Np = 2∙K∙m On K expressa l’ordre de multiplicitat de l’estructura polar. Es defineix la multiplicitat K com el nombre de parells de pols per fase,, així doncs per a la figura 1.2, es té un parells de pols per fase (K=1), resultant Np=8 pols.
Disseny i construcció d’un prototip de LSRM
8
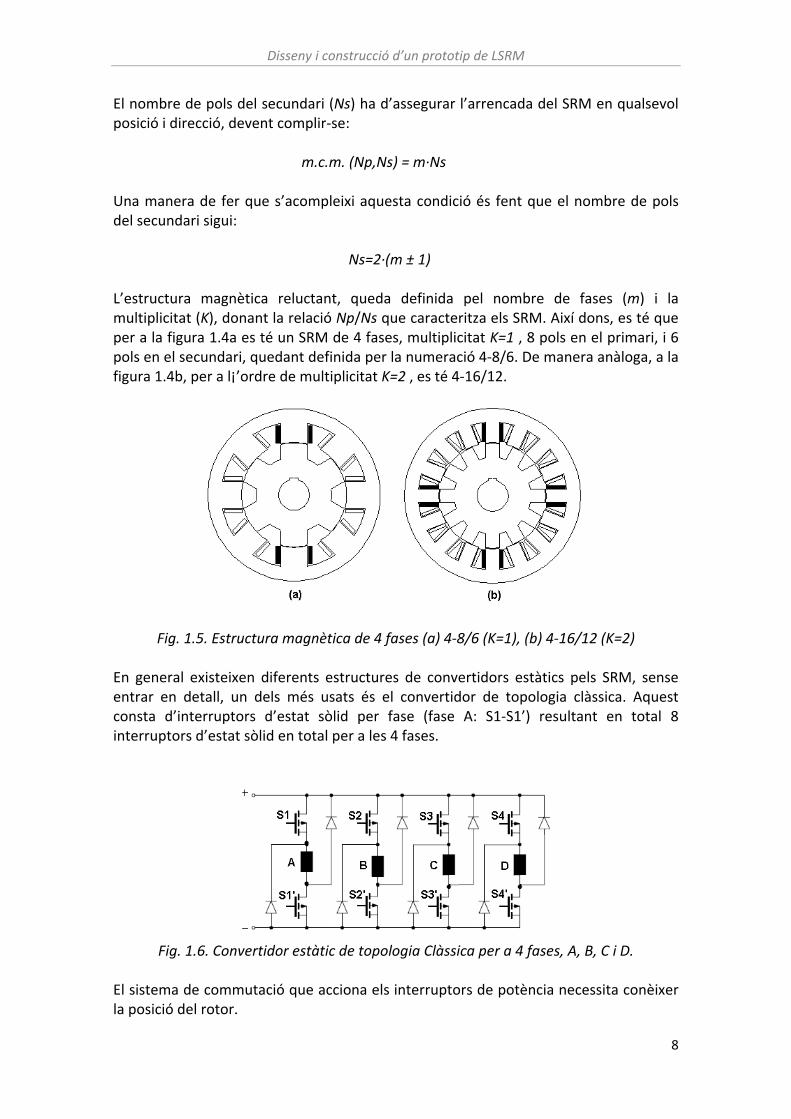
El nombre de pols del secundari (Ns) ha d’assegurar l’arrencada del SRM en qualsevol posició i direcció, devent complir‐se: m.c.m. (Np,Ns) = m∙Ns Una manera de fer que s’acompleixi aquesta condició és fent que el nombre de pols del secundari sigui: Ns=2∙(m ± 1) L’estructura magnètica reluctant, queda definida pel nombre de fases (m) i la multiplicitat (K), donant la relació Np/Ns que caracteritza els SRM. Així dons, es té que per a la figura 1.4a es té un SRM de 4 fases, multiplicitat K=1 , 8 pols en el primari, i 6 pols en el secundari, quedant definida per la numeració 4‐8/6. De manera anàloga, a la figura 1.4b, per a l¡’ordre de multiplicitat K=2 , es té 4‐16/12.
Fig. 1.5. Estructura magnètica de 4 fases (a) 4‐8/6 (K=1), (b) 4‐16/12 (K=2) En general existeixen diferents estructures de convertidors estàtics pels SRM, sense entrar en detall, un dels més usats és el convertidor de topologia clàssica. Aquest consta d’interruptors d’estat sòlid per fase (fase A: S1‐S1’) resultant en total 8 interruptors d’estat sòlid en total per a les 4 fases.
Fig. 1.6. Convertidor estàtic de topologia Clàssica per a 4 fases, A, B, C i D.
El sistema de commutació que acciona els interruptors de potència necessita conèixer la posició del rotor.
Disseny i construcció d’un prototip de LSRM
9
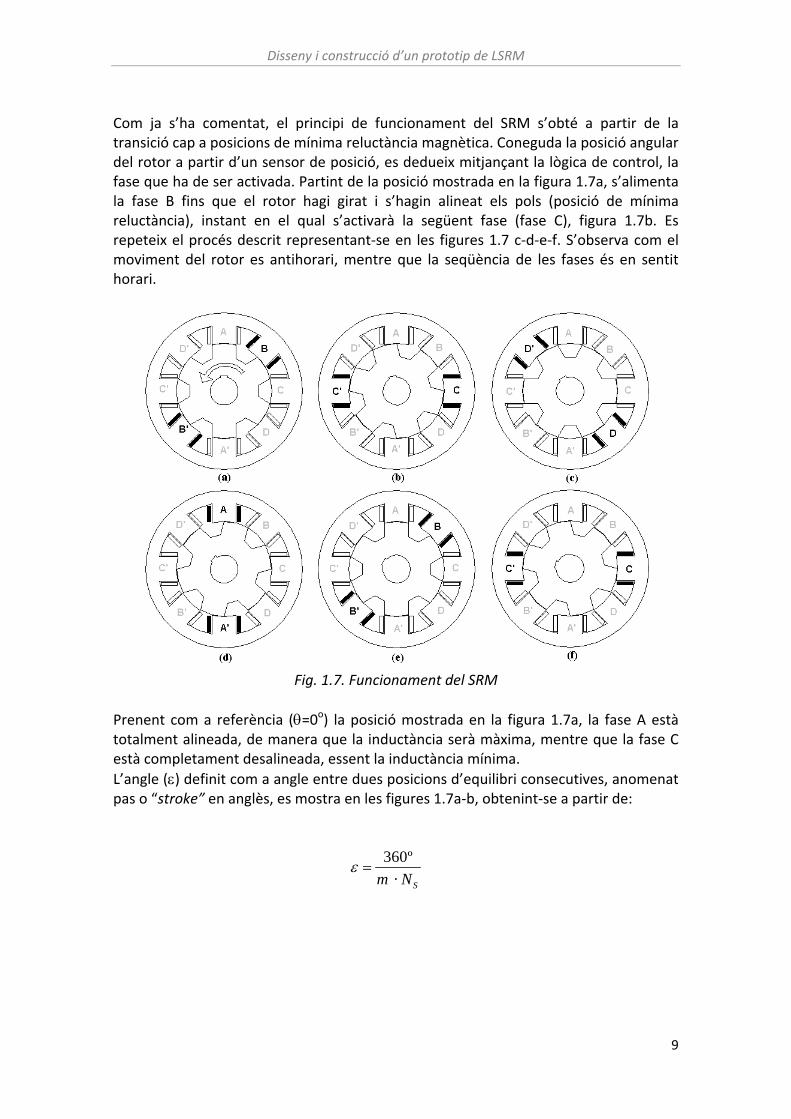
Com ja s’ha comentat, el principi de funcionament del SRM s’obté a partir de la transició cap a posicions de mínima reluctància magnètica. Coneguda la posició angular del rotor a partir d’un sensor de posició, es dedueix mitjançant la lògica de control, la fase que ha de ser activada. Partint de la posició mostrada en la figura 1.7a, s’alimenta la fase B fins que el rotor hagi girat i s’hagin alineat els pols (posició de mínima reluctància), instant en el qual s’activarà la següent fase (fase C), figura 1.7b. Es repeteix el procés descrit representant‐se en les figures 1.7 c‐d‐e‐f. S’observa com el moviment del rotor es antihorari, mentre que la seqüència de les fases és en sentit horari.
Fig. 1.7. Funcionament del SRM
Prenent com a referència (=0o) la posició mostrada en la figura 1.7a, la fase A està totalment alineada, de manera que la inductància serà màxima, mentre que la fase C està completament desalineada, essent la inductància mínima.
L’angle () definit com a angle entre dues posicions d’equilibri consecutives, anomenat pas o “stroke” en anglès, es mostra en les figures 1.7a‐b, obtenint‐se a partir de:
360º
· Sm N
Disseny i construcció d’un prototip de LSRM
10
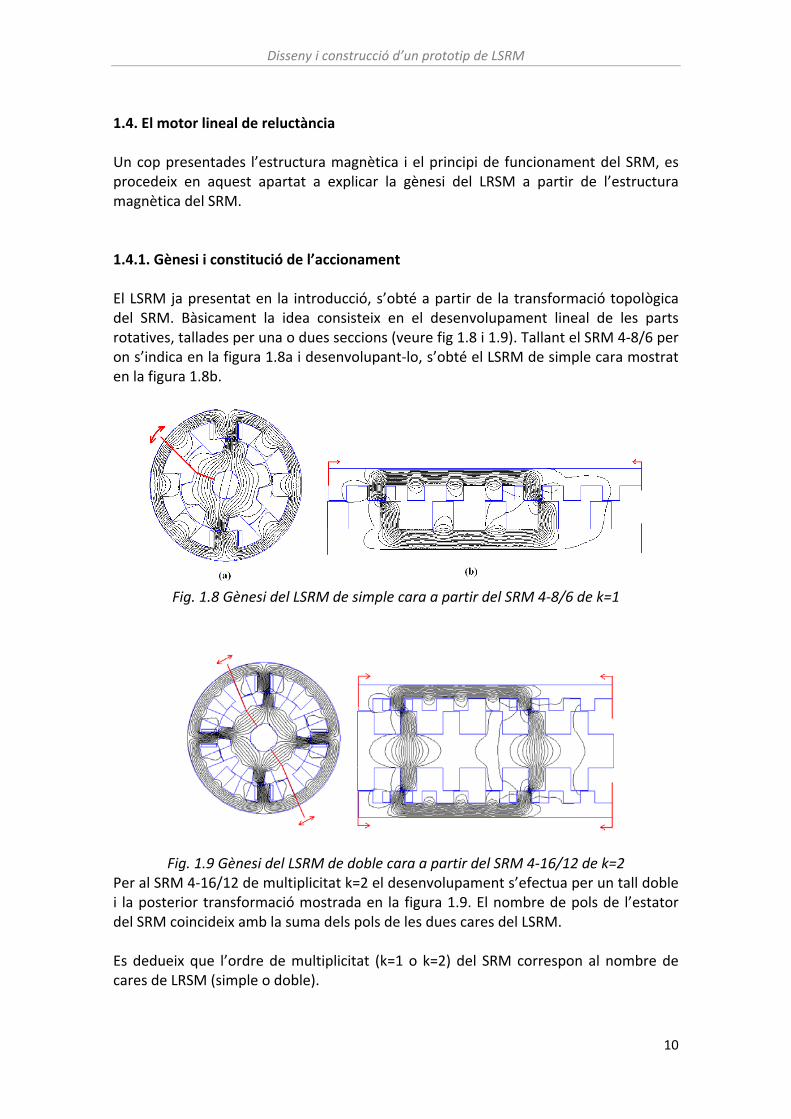
1.4. El motor lineal de reluctància Un cop presentades l’estructura magnètica i el principi de funcionament del SRM, es procedeix en aquest apartat a explicar la gènesi del LRSM a partir de l’estructura magnètica del SRM. 1.4.1. Gènesi i constitució de l’accionament El LSRM ja presentat en la introducció, s’obté a partir de la transformació topològica del SRM. Bàsicament la idea consisteix en el desenvolupament lineal de les parts rotatives, tallades per una o dues seccions (veure fig 1.8 i 1.9). Tallant el SRM 4‐8/6 per on s’indica en la figura 1.8a i desenvolupant‐lo, s’obté el LSRM de simple cara mostrat en la figura 1.8b.
Fig. 1.8 Gènesi del LSRM de simple cara a partir del SRM 4‐8/6 de k=1
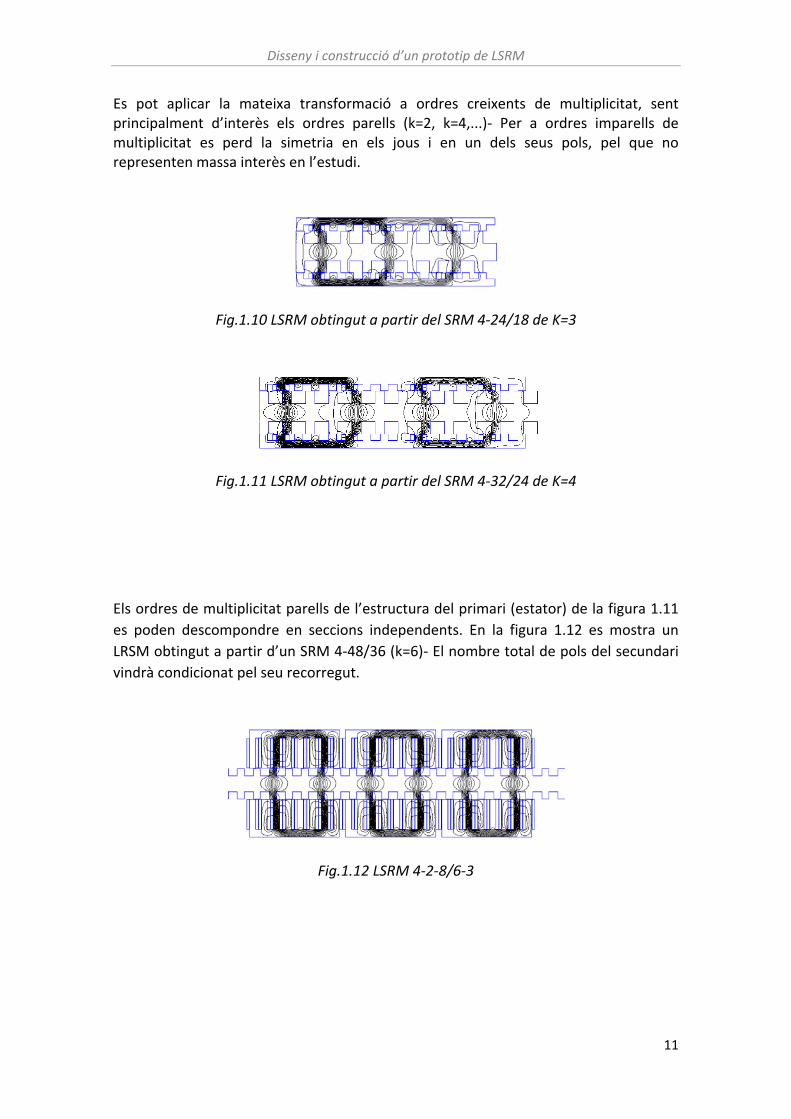
Fig. 1.9 Gènesi del LSRM de doble cara a partir del SRM 4‐16/12 de k=2 Per al SRM 4‐16/12 de multiplicitat k=2 el desenvolupament s’efectua per un tall doble i la posterior transformació mostrada en la figura 1.9. El nombre de pols de l’estator del SRM coincideix amb la suma dels pols de les dues cares del LSRM. Es dedueix que l’ordre de multiplicitat (k=1 o k=2) del SRM correspon al nombre de cares de LRSM (simple o doble).
Disseny i construcció d’un prototip de LSRM
11
Es pot aplicar la mateixa transformació a ordres creixents de multiplicitat, sent principalment d’interès els ordres parells (k=2, k=4,...)‐ Per a ordres imparells de multiplicitat es perd la simetria en els jous i en un dels seus pols, pel que no representen massa interès en l’estudi.
Fig.1.10 LSRM obtingut a partir del SRM 4‐24/18 de K=3
Fig.1.11 LSRM obtingut a partir del SRM 4‐32/24 de K=4
Els ordres de multiplicitat parells de l’estructura del primari (estator) de la figura 1.11
es poden descompondre en seccions independents. En la figura 1.12 es mostra un
LRSM obtingut a partir d’un SRM 4‐48/36 (k=6)‐ El nombre total de pols del secundari
vindrà condicionat pel seu recorregut.
Fig.1.12 LSRM 4‐2‐8/6‐3
Disseny i construcció d’un prototip de LSRM
12
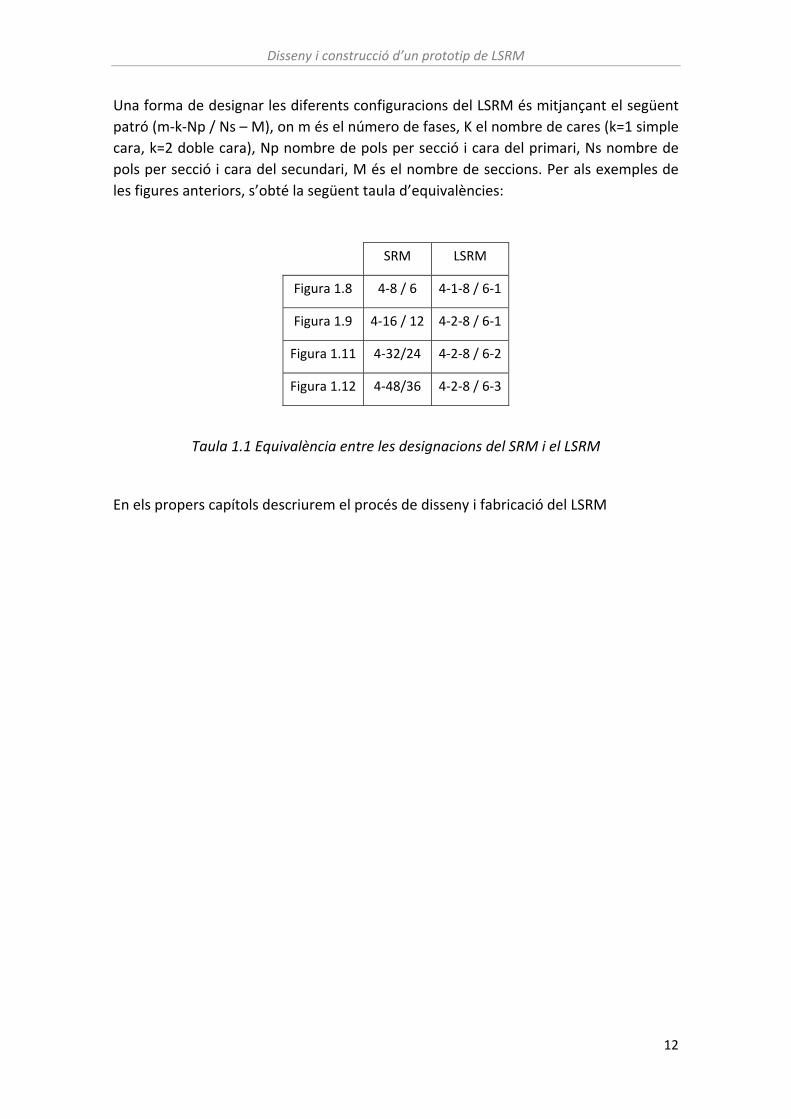
Una forma de designar les diferents configuracions del LSRM és mitjançant el següent
patró (m‐k‐Np / Ns – M), on m és el número de fases, K el nombre de cares (k=1 simple
cara, k=2 doble cara), Np nombre de pols per secció i cara del primari, Ns nombre de
pols per secció i cara del secundari, M és el nombre de seccions. Per als exemples de
les figures anteriors, s’obté la següent taula d’equivalències:
SRM LSRM
Figura 1.8 4‐8 / 6 4‐1‐8 / 6‐1
Figura 1.9 4‐16 / 12 4‐2‐8 / 6‐1
Figura 1.11 4‐32/24 4‐2‐8 / 6‐2
Figura 1.12 4‐48/36 4‐2‐8 / 6‐3
Taula 1.1 Equivalència entre les designacions del SRM i el LSRM
En els propers capítols descriurem el procés de disseny i fabricació del LSRM
Disseny i construcció d’un prototip de LSRM
13
Capítol 2 : Disseny i fabricació d’un prototip de LSRM
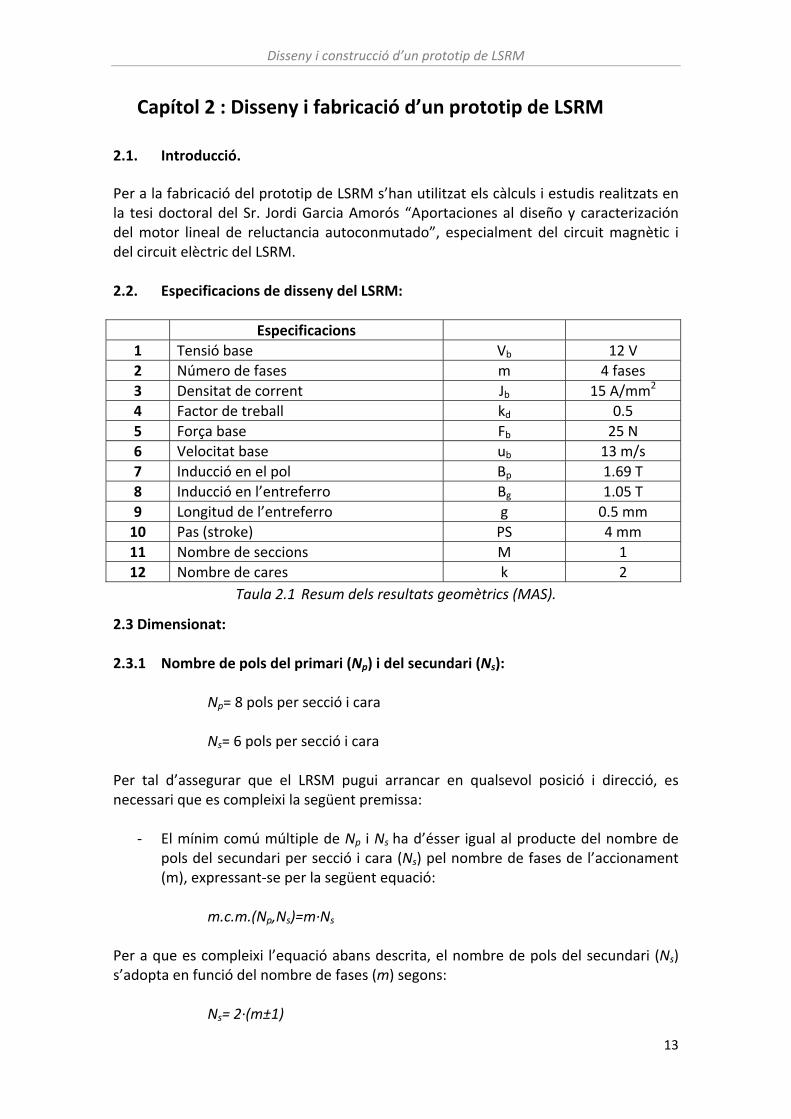
2.1. Introducció. Per a la fabricació del prototip de LSRM s’han utilitzat els càlculs i estudis realitzats en la tesi doctoral del Sr. Jordi Garcia Amorós “Aportaciones al diseño y caracterización del motor lineal de reluctancia autoconmutado”, especialment del circuit magnètic i del circuit elèctric del LSRM. 2.2. Especificacions de disseny del LSRM:
Especificacions
1 Tensió base Vb 12 V
2 Número de fases m 4 fases
3 Densitat de corrent Jb 15 A/mm2
4 Factor de treball kd 0.5
5 Força base Fb 25 N
6 Velocitat base ub 13 m/s
7 Inducció en el pol Bp 1.69 T
8 Inducció en l’entreferro Bg 1.05 T
9 Longitud de l’entreferro g 0.5 mm
10 Pas (stroke) PS 4 mm
11 Nombre de seccions M 1
12 Nombre de cares k 2
Taula 2.1 Resum dels resultats geomètrics (MAS).
2.3 Dimensionat:
2.3.1 Nombre de pols del primari (Np) i del secundari (Ns):
Np= 8 pols per secció i cara
Ns= 6 pols per secció i cara
Per tal d’assegurar que el LRSM pugui arrancar en qualsevol posició i direcció, es necessari que es compleixi la següent premissa:
‐ El mínim comú múltiple de Np i Ns ha d’ésser igual al producte del nombre de
pols del secundari per secció i cara (Ns) pel nombre de fases de l’accionament (m), expressant‐se per la següent equació:
m.c.m.(Np,Ns)=m∙Ns
Per a que es compleixi l’equació abans descrita, el nombre de pols del secundari (Ns) s’adopta en funció del nombre de fases (m) segons:
Ns= 2∙(m±1)
Disseny i construcció d’un prototip de LSRM
14
En el nostre cas hem escollit:
Ns= 2∙(m‐1)
Per tant, Ns=6 Pols
El nombre de pols del primari per secció i cara (Np), sempre compleix:
Np= 2∙m Per tant, Np=8 Pols
2.3.2 Pas polar del primari (Tp):
Tp=PS∙Ns / 2 = 4∙6 / 2 = 12 mm
2.3.3 Pas polar del secundari (Ts):
Ts=PS∙Np / 2 = 4∙8 / 2 = 16 mm
2.3.4 Longitud d’un sector (L):
L= Np∙TP = 8 ∙ 12 = 96 mm
2.3.5 Distància entre les posicions alineada i no alineada
S=TS/2=8mm
2.3.6 Ample polar primari
Optimitzant per a la força mitja de propulsió i J= 15A/mm2
αp = bp / TP = 0.5 → bp = 6mm
2.3.7 Ample de ranura primari
cp=TP ‐∙bp=6mm
Disseny i construcció d’un prototip de LSRM
15
2.3.8 Ample polar secundari Optimitzant per a l força mitja de propulsió i J=15A/mm2
αs = bs / TP = 0.5833 → bs = 7mm
2.3.9 Ample de ranura del secundari
cs= TS ‐ bs=9mm
2.3.10 Longitud de pol del primari La longitud de pol primari no ha de ser superior a lp=2.5∙TP
Essent lp=30mm
2.3.11 Longitud de pol del secundari La longitud de pol del secundari ha de ser superior a βs=0.5, sent
ls ≥ TS/2 → ls ≥ 6mm. Adoptat ls = 7mm
2.3.12 Altura de la part mòbil
lst ≥ 2∙ls → lst ≥ 12mm.
Per tal de donar consistència mecànica a la subjecció del paquet de xapes, s’adopta
lst = 30mm
2.3.13 Altura del Jou Un criteri de disseny òptim és hy=TP/1.846 ó bé hy=1.3∙bp.
Per tant:
2.3.14 Longitud transversal del paquet de xapes
1.3· 8 y ph b mm
0·0.03
· · ·X
Wg
FL m
k M B g
Disseny i construcció d’un prototip de LSRM
16
2.3.15 Nombre d’espires de la bobina
N1=11 espires
2.3.16 Inductància no alineada
Lu=0.168 mH
2.3.17 Inductància alineada no saturada
Lau = 0.314 mH
2.3.18 Inductància en alineament saturada (MAS)
L’as = Lu = 0.168 mH
2.3.19 Fluxe concatenat per a kd=1
2.3.20 Aïllament intern de la ranura
wr=0.3 mm
2.3.21 Falca de tancament de la ranura
wc =5 mm
2.3.22 Cota màxima de conductor
dc,max ≤ 0.5∙cp‐2∙wr=2.4 mm
· · · 0.01426 ·s F p p WN B b L V s
Disseny i construcció d’un prototip de LSRM
17
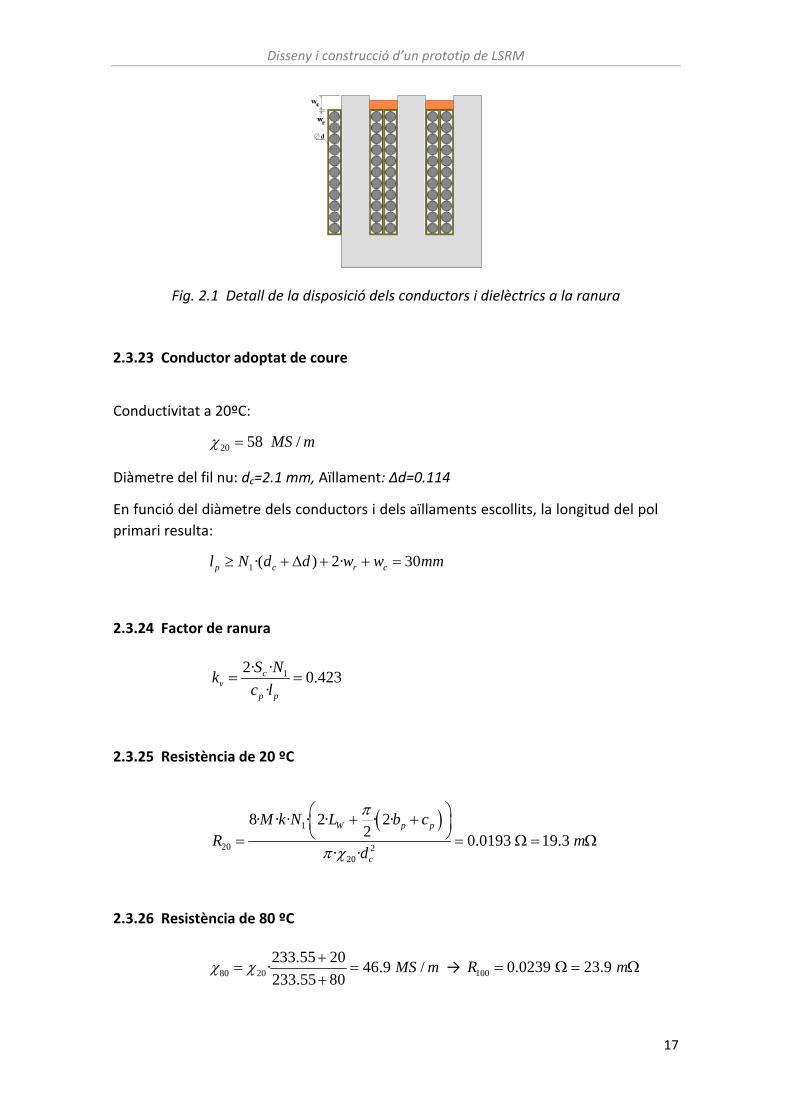
Fig. 2.1 Detall de la disposició dels conductors i dielèctrics a la ranura
2.3.23 Conductor adoptat de coure
Conductivitat a 20ºC:
Diàmetre del fil nu: dc=2.1 mm, Aïllament: ∆d=0.114
En funció del diàmetre dels conductors i dels aïllaments escollits, la longitud del pol
primari resulta:
2.3.24 Factor de ranura
2.3.25 Resistència de 20 ºC
2.3.26 Resistència de 80 ºC
→
20 58 /MS m
1·( ) 2· 30p c r cl N d d w w mm
12· ·0.423
·c
vp p
S Nk
c l
1
20 220
8· · · · 2· · 2·2
0.0193 19.3 · ·
W p p
c
M k N L b cR m
d
80 20
233.55 20· 46.9 /233.55 80
MS m
100 0.0239 23.9 R m
Disseny i construcció d’un prototip de LSRM
18
2.3.27 Corrent base
2.3.28 Inductància aparent
2.3.29 Factor KL
KL=0.254
2.3.30 Energia magnètica del cicle de conversió
= 0.187 J
2.3.31 Energia magnètica del cicle de treball
Wd=W∙kd=0.094 J
2.3.32 Força mitja de propulsió per cicle
=23.5 N
2.3.33 Força per unitat de superfície
2· · 51.954B b cI J d A
0.28 sas
B
L mHI
· · · · · · · · ·L v p p p W b pW k M K k c l b L J B
,
· · ·2· · · · · · · ·p p p WS
x avg L v b pP P
c l b LNF k M K k J B
N T
, 2, 34.7 /
2· · · ·x avg
x avgp W
Ff kN m
k M b L
Disseny i construcció d’un prototip de LSRM
19
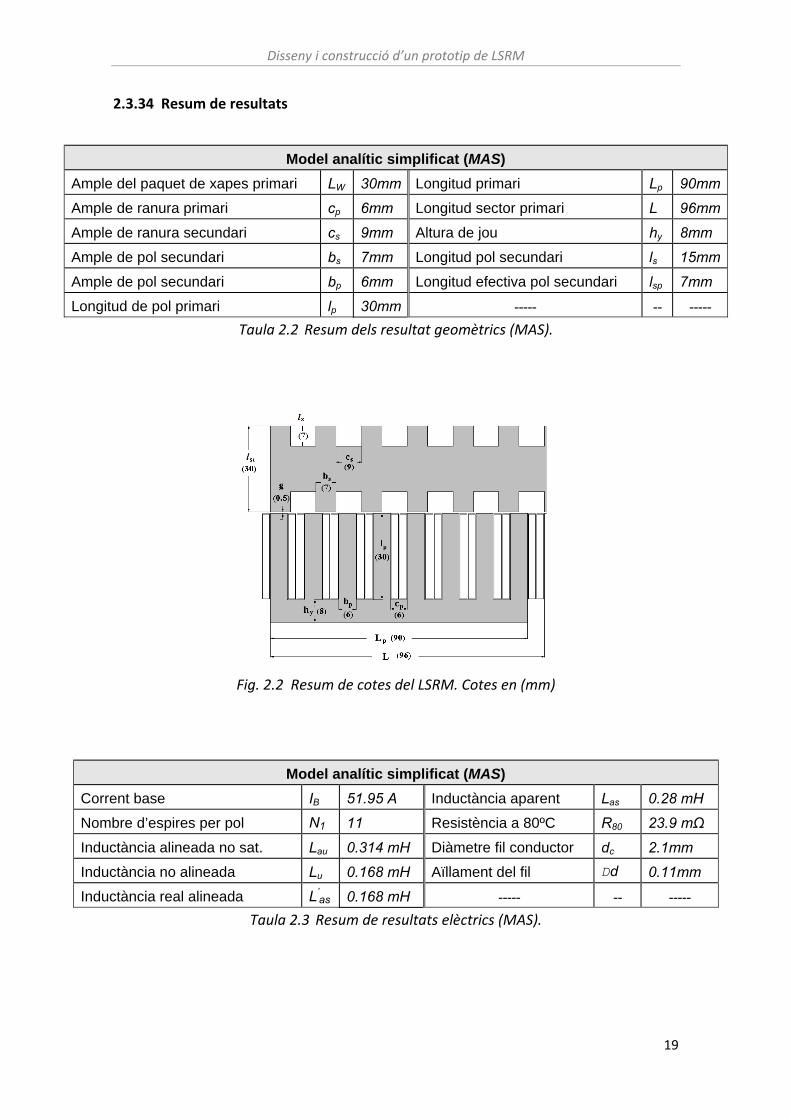
2.3.34 Resum de resultats
Model analític simplificat (MAS)
Ample del paquet de xapes primari LW 30mm Longitud primari Lp 90mm
Ample de ranura primari cp 6mm Longitud sector primari L 96mm
Ample de ranura secundari cs 9mm Altura de jou hy 8mm
Ample de pol secundari bs 7mm Longitud pol secundari ls 15mm
Ample de pol secundari bp 6mm Longitud efectiva pol secundari lsp 7mm
Longitud de pol primari lp 30mm ----- -- -----
Taula 2.2 Resum dels resultat geomètrics (MAS).
Fig. 2.2 Resum de cotes del LSRM. Cotes en (mm)
Model analític simplificat (MAS)
Corrent base IB 51.95 A Inductància aparent Las 0.28 mH
Nombre d’espires per pol N1 11 Resistència a 80ºC R80 23.9 mΩ
Inductància alineada no sat. Lau 0.314 mH Diàmetre fil conductor dc 2.1mm
Inductància no alineada Lu 0.168 mH Aïllament del fil Dd 0.11mm
Inductància real alineada L’as 0.168 mH ----- -- -----
Taula 2.3 Resum de resultats elèctrics (MAS).

Disseny i construcció d’un prototip de LSRM
20
2.4 Parts que componen el LSRM:
‐ Circuit Magnètic ‐ Circuit Elèctric ‐ Carcassa ‐ Part mòbil
2.4.1 Circuit Magnètic.
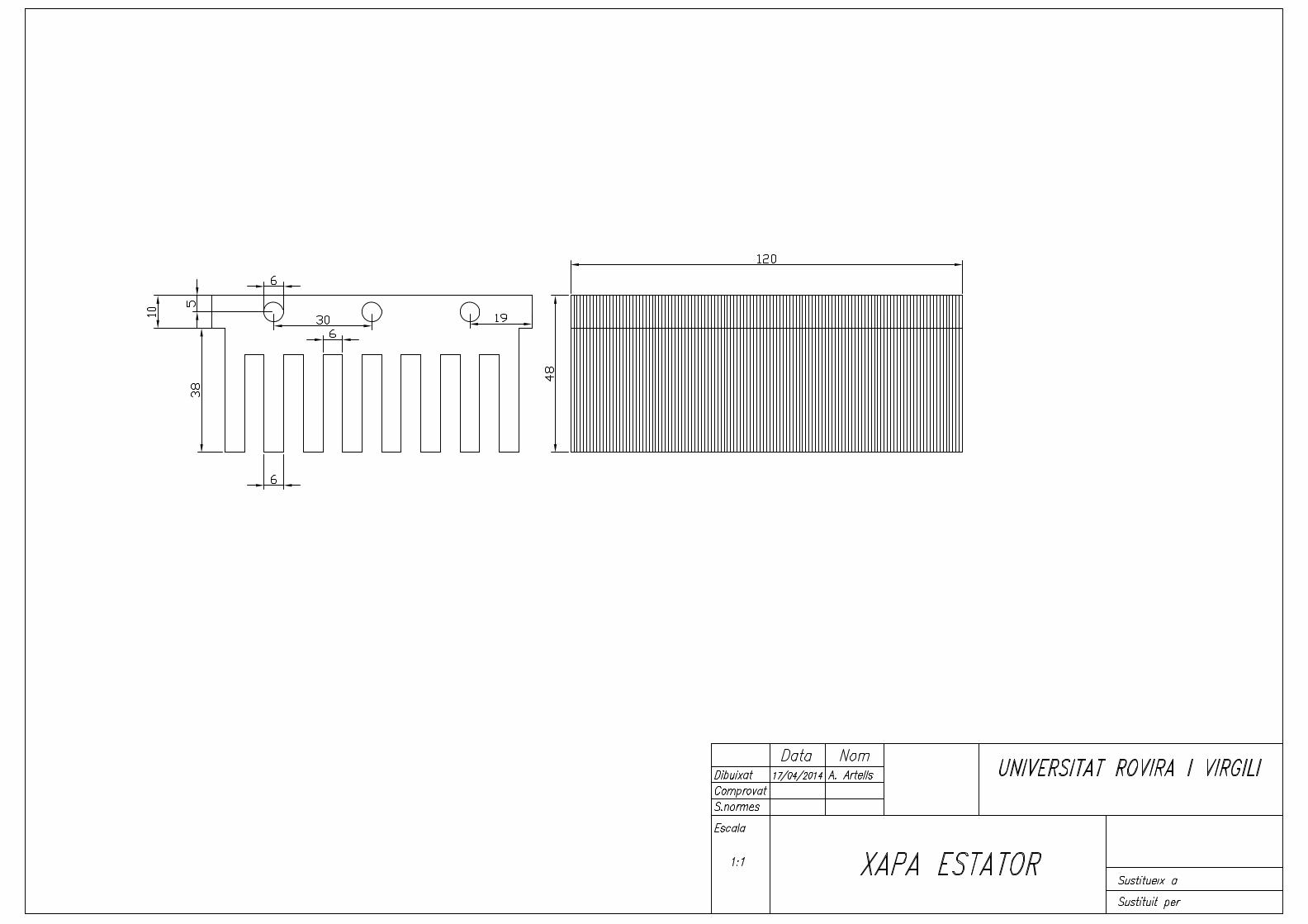
El circuit magnètic del LSRM està format per dues parts fixes (estator), on s’allotjaran les bobines i es crearà el camp magnètic, i una part mòbil, que es desplaçarà cada cop que s’excitin les bobines de l’estator adoptant la posició de mínima reluctància. Per a la construcció dels circuits magnètiques s’ha utilitzat xapa ferromagnètica d’acer al silici Fev 270‐50, obtingudes per tall làser.
Fig 2.3 Detall de la xapa magnètica
Per aconseguir que les xapes no es moguin en la col∙locació de les bobines, aquestes han estat fixades provisionalment amb tres cargols.
Fig 2.4 Detall de la xapa magnètica apilada
Disseny i construcció d’un prototip de LSRM
21
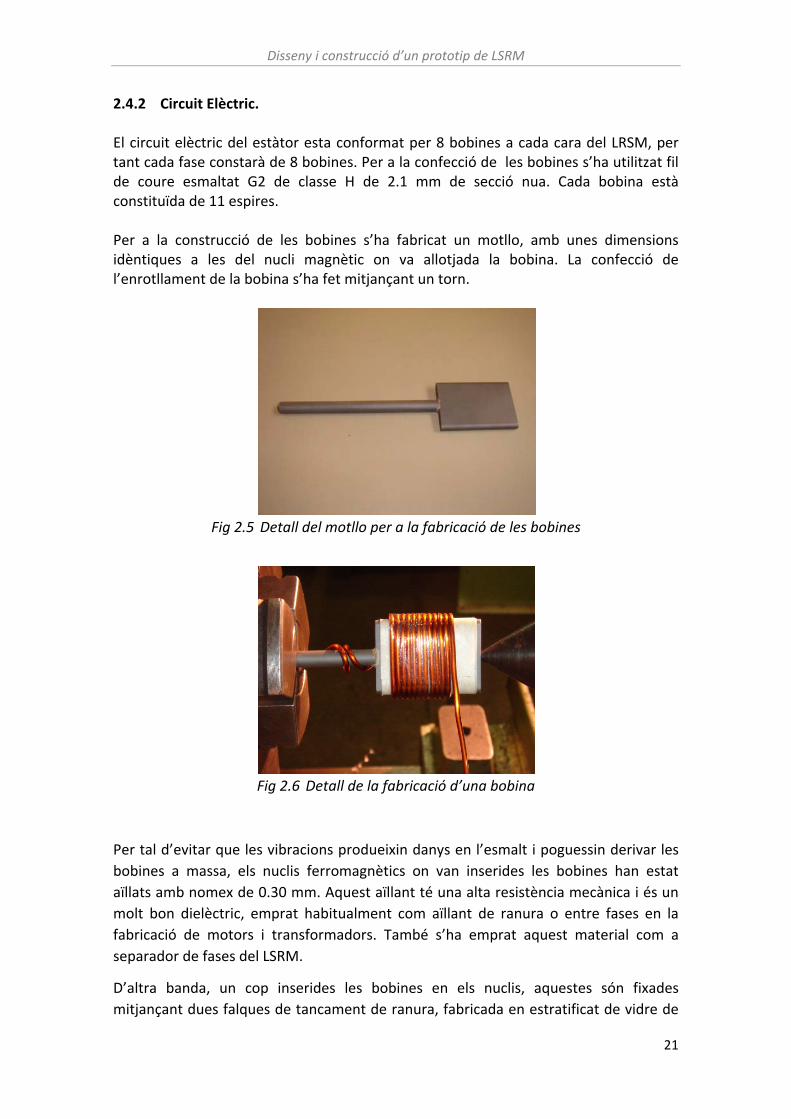
2.4.2 Circuit Elèctric.
El circuit elèctric del estàtor esta conformat per 8 bobines a cada cara del LRSM, per tant cada fase constarà de 8 bobines. Per a la confecció de les bobines s’ha utilitzat fil de coure esmaltat G2 de classe H de 2.1 mm de secció nua. Cada bobina està constituïda de 11 espires. Per a la construcció de les bobines s’ha fabricat un motllo, amb unes dimensions idèntiques a les del nucli magnètic on va allotjada la bobina. La confecció de l’enrotllament de la bobina s’ha fet mitjançant un torn.
Fig 2.5 Detall del motllo per a la fabricació de les bobines
Fig 2.6 Detall de la fabricació d’una bobina
Per tal d’evitar que les vibracions produeixin danys en l’esmalt i poguessin derivar les
bobines a massa, els nuclis ferromagnètics on van inserides les bobines han estat
aïllats amb nomex de 0.30 mm. Aquest aïllant té una alta resistència mecànica i és un
molt bon dielèctric, emprat habitualment com aïllant de ranura o entre fases en la
fabricació de motors i transformadors. També s’ha emprat aquest material com a
separador de fases del LSRM.
D’altra banda, un cop inserides les bobines en els nuclis, aquestes són fixades
mitjançant dues falques de tancament de ranura, fabricada en estratificat de vidre de
Disseny i construcció d’un prototip de LSRM
22
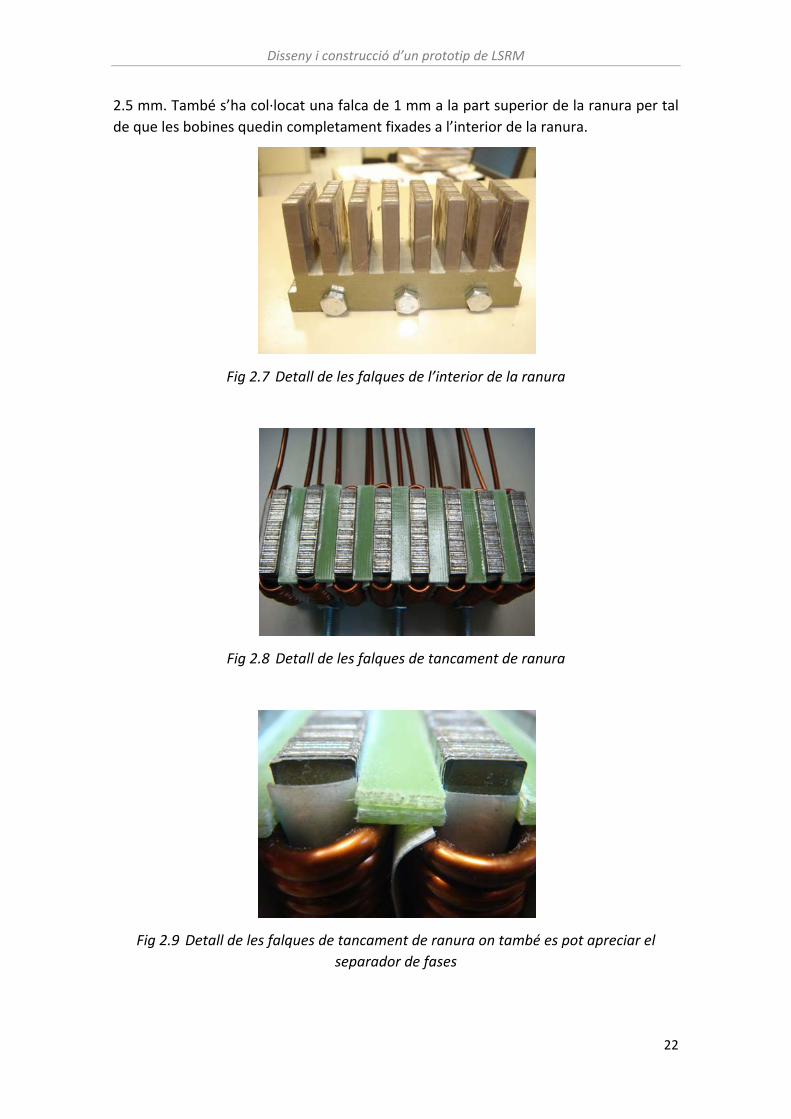
2.5 mm. També s’ha col∙locat una falca de 1 mm a la part superior de la ranura per tal
de que les bobines quedin completament fixades a l’interior de la ranura.
Fig 2.7 Detall de les falques de l’interior de la ranura
Fig 2.8 Detall de les falques de tancament de ranura
Fig 2.9 Detall de les falques de tancament de ranura on també es pot apreciar el
separador de fases
Disseny i construcció d’un prototip de LSRM
23
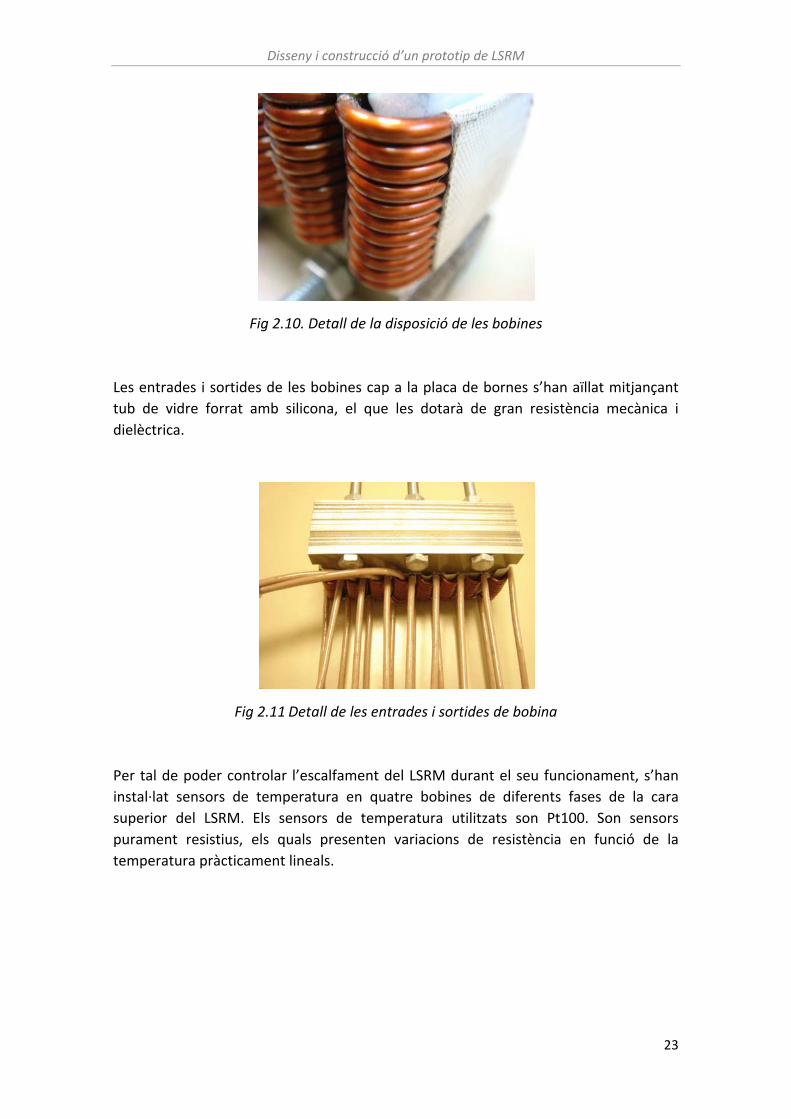
Fig 2.10. Detall de la disposició de les bobines
Les entrades i sortides de les bobines cap a la placa de bornes s’han aïllat mitjançant
tub de vidre forrat amb silicona, el que les dotarà de gran resistència mecànica i
dielèctrica.
Fig 2.11 Detall de les entrades i sortides de bobina
Per tal de poder controlar l’escalfament del LSRM durant el seu funcionament, s’han
instal∙lat sensors de temperatura en quatre bobines de diferents fases de la cara
superior del LSRM. Els sensors de temperatura utilitzats son Pt100. Son sensors
purament resistius, els quals presenten variacions de resistència en funció de la
temperatura pràcticament lineals.

Disseny i construcció d’un prototip de LSRM
24
Fig 2.12 Detall dels sensors de temperatura
Un cop col∙locades les bobines a l’interior de la ranura i degudament falcades, es
procedeix a la impregnació del conjunt amb resina epoxi, per tal de donar consistència
a tot el conjunt i millorar el seu aïllament.
Fig 2.13 Detall de les bobines enresinades
2.4.3 Carcassa
La carcassa ha estat fabricada en alumini. S’ha escollit aquest material per la seva
lleugeresa i perquè és un material fàcilment mecanitzable, cosa que abarateix els
costos de fabricació.
Degut a que es tracta d’un prototip, s’ha dissenyat una carcassa senzilla i de fàcil
muntatge, composada per dues peces que ens subjectaran els bobinats i quatre
columnes que subjectaran el rotor i ens fixaran l’entreferro del prototip.
Disseny i construcció d’un prototip de LSRM
25
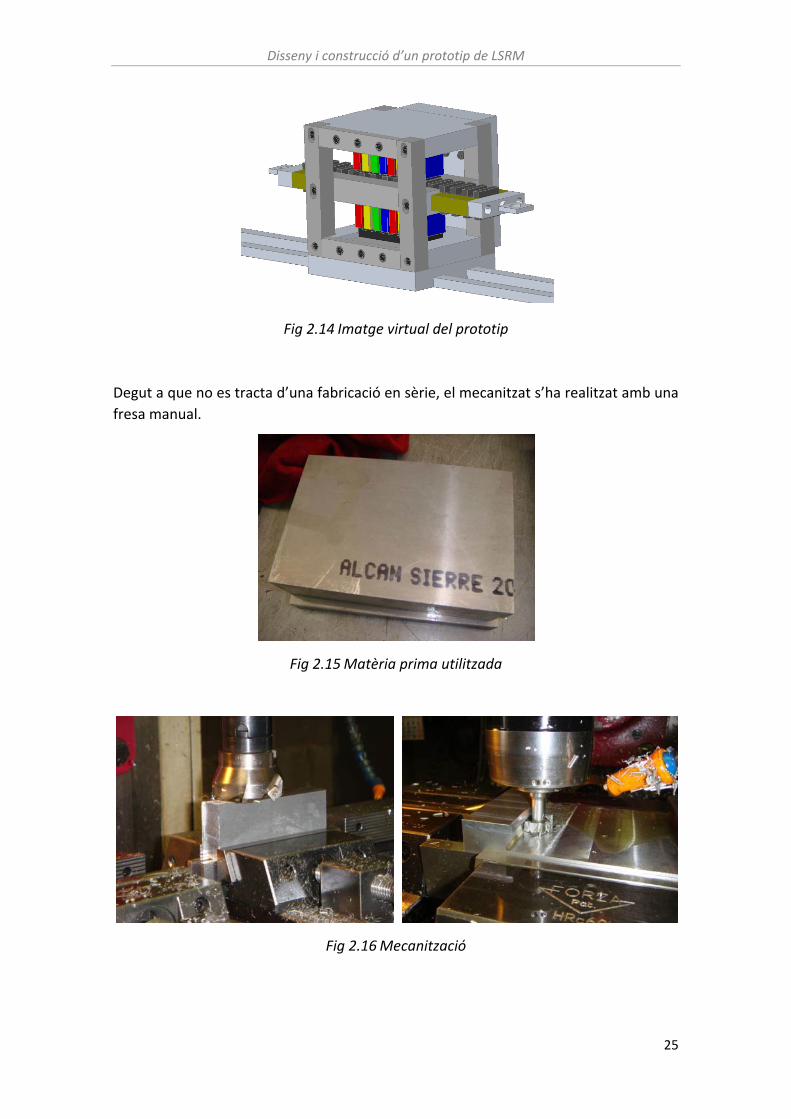
Fig 2.14 Imatge virtual del prototip
Degut a que no es tracta d’una fabricació en sèrie, el mecanitzat s’ha realitzat amb una
fresa manual.
Fig 2.15 Matèria prima utilitzada
Fig 2.16 Mecanització
Disseny i construcció d’un prototip de LSRM
26
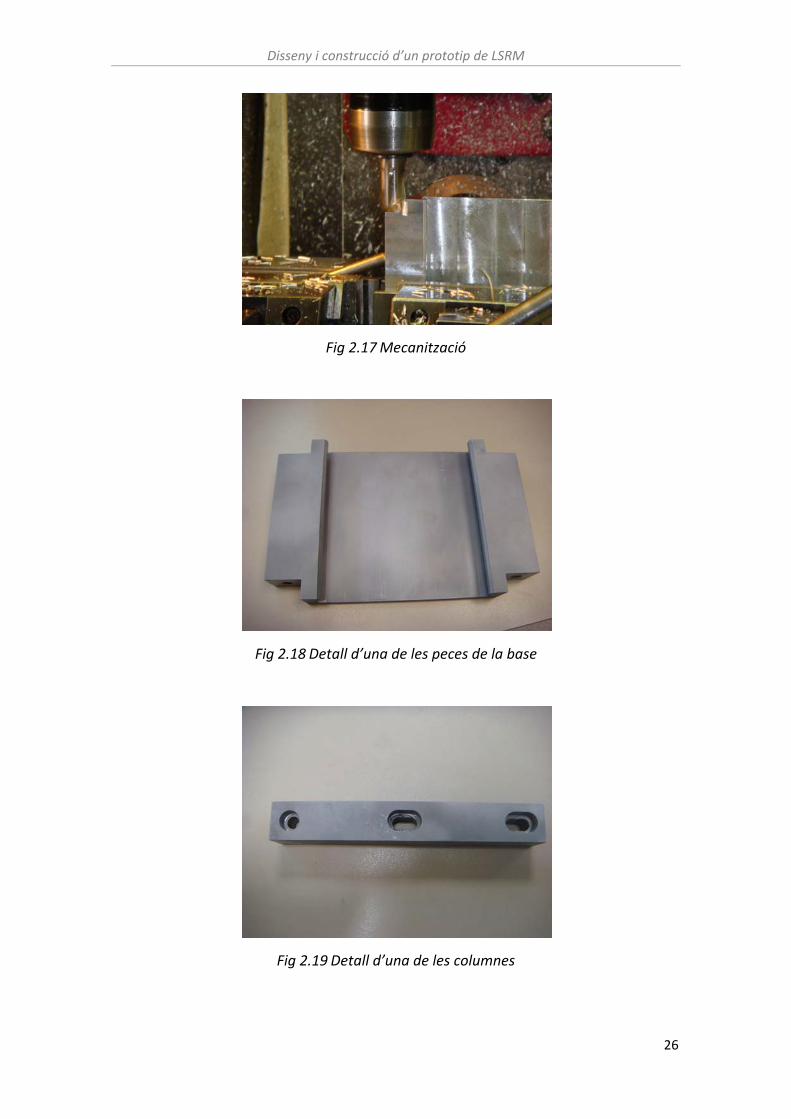
Fig 2.17 Mecanització
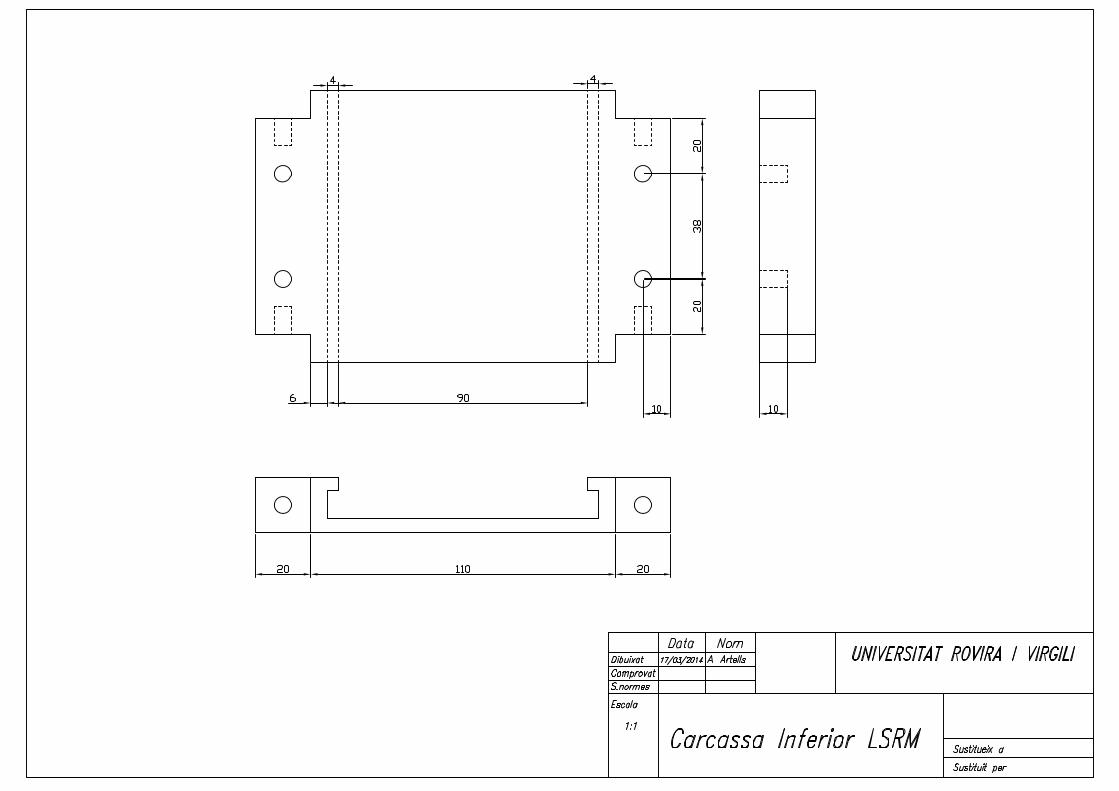
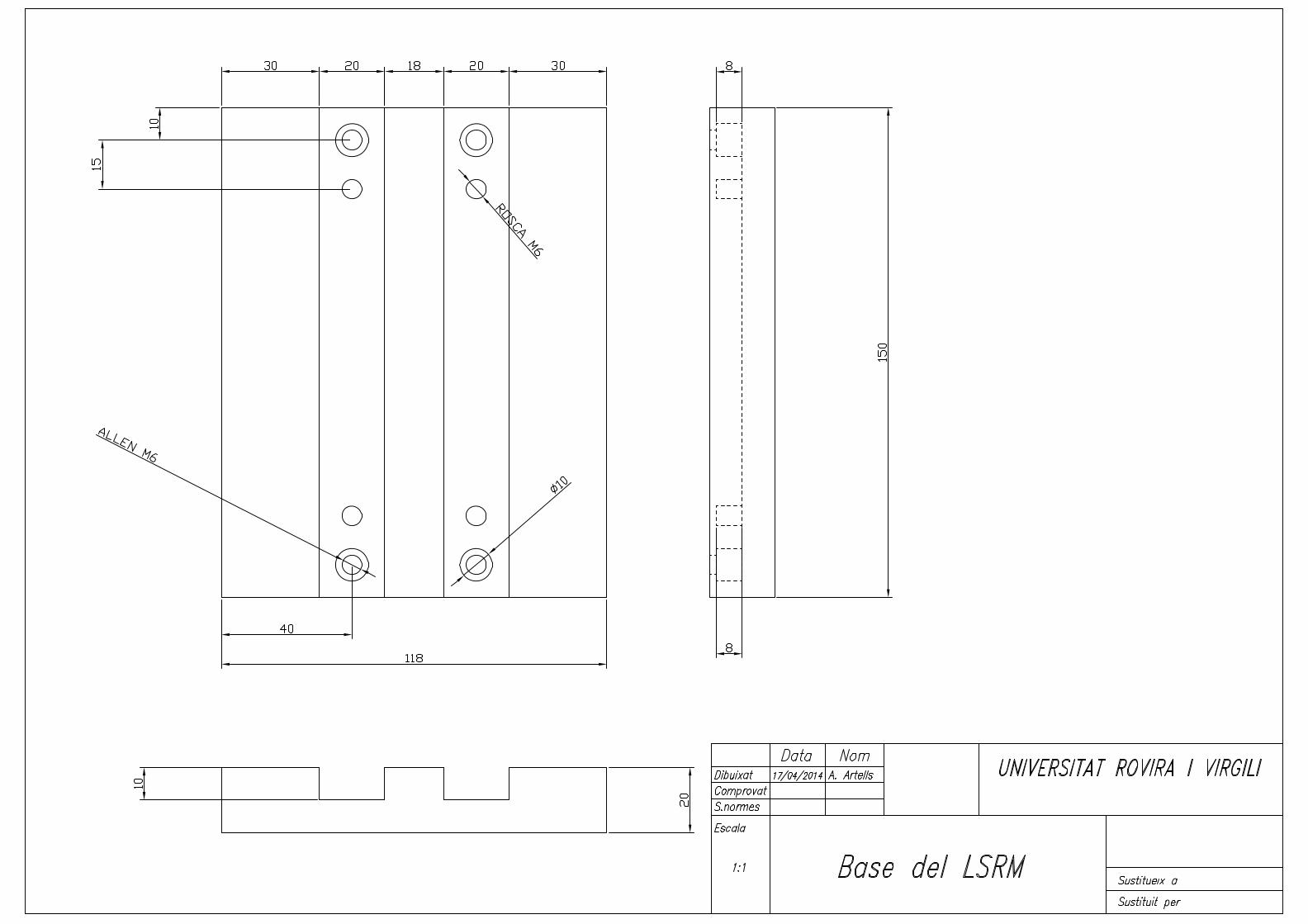
Fig 2.18 Detall d’una de les peces de la base
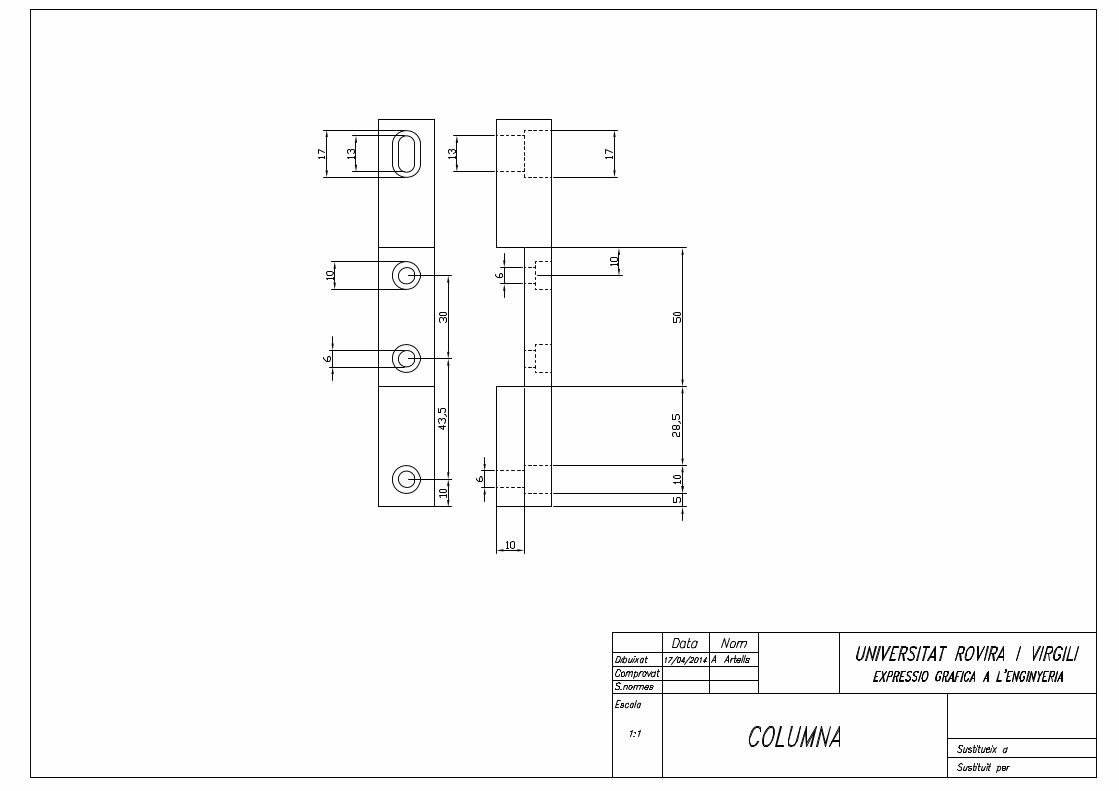
Fig 2.19 Detall d’una de les columnes
Disseny i construcció d’un prototip de LSRM
27
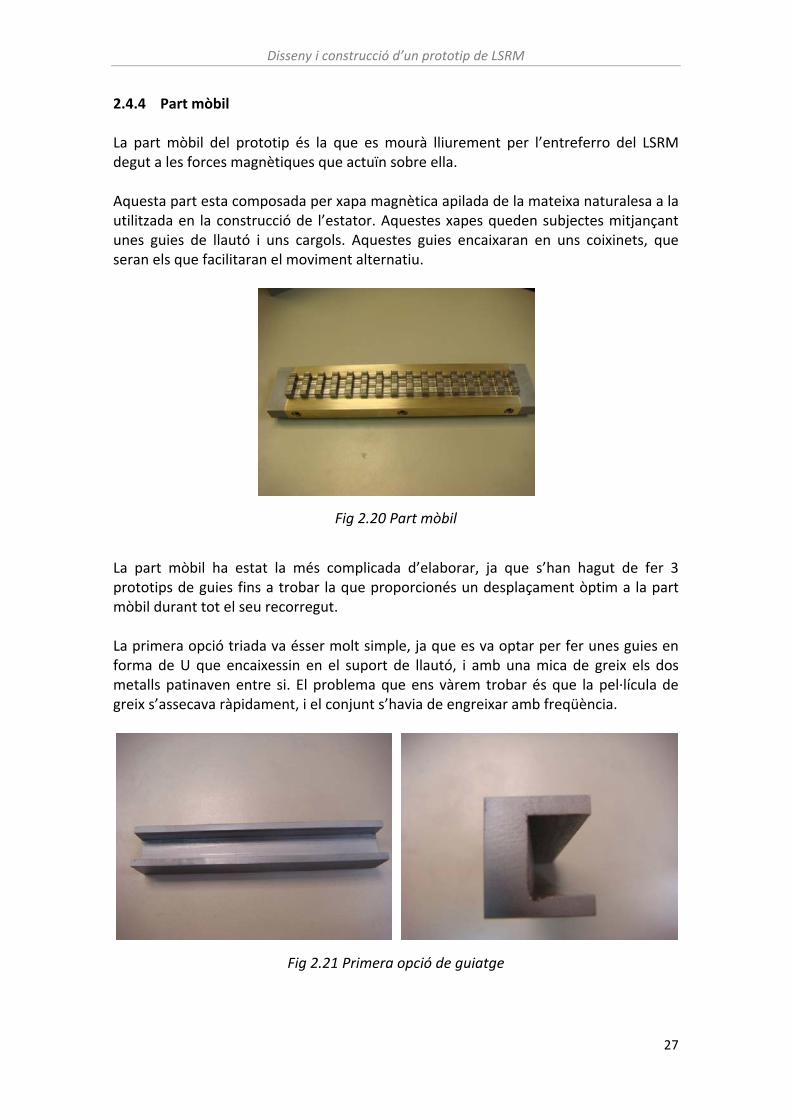
2.4.4 Part mòbil La part mòbil del prototip és la que es mourà lliurement per l’entreferro del LSRM degut a les forces magnètiques que actuïn sobre ella.
Aquesta part esta composada per xapa magnètica apilada de la mateixa naturalesa a la utilitzada en la construcció de l’estator. Aquestes xapes queden subjectes mitjançant unes guies de llautó i uns cargols. Aquestes guies encaixaran en uns coixinets, que seran els que facilitaran el moviment alternatiu.
Fig 2.20 Part mòbil
La part mòbil ha estat la més complicada d’elaborar, ja que s’han hagut de fer 3 prototips de guies fins a trobar la que proporcionés un desplaçament òptim a la part mòbil durant tot el seu recorregut.
La primera opció triada va ésser molt simple, ja que es va optar per fer unes guies en forma de U que encaixessin en el suport de llautó, i amb una mica de greix els dos metalls patinaven entre si. El problema que ens vàrem trobar és que la pel∙lícula de greix s’assecava ràpidament, i el conjunt s’havia de engreixar amb freqüència.
Fig 2.21 Primera opció de guiatge
Disseny i construcció d’un prototip de LSRM
28
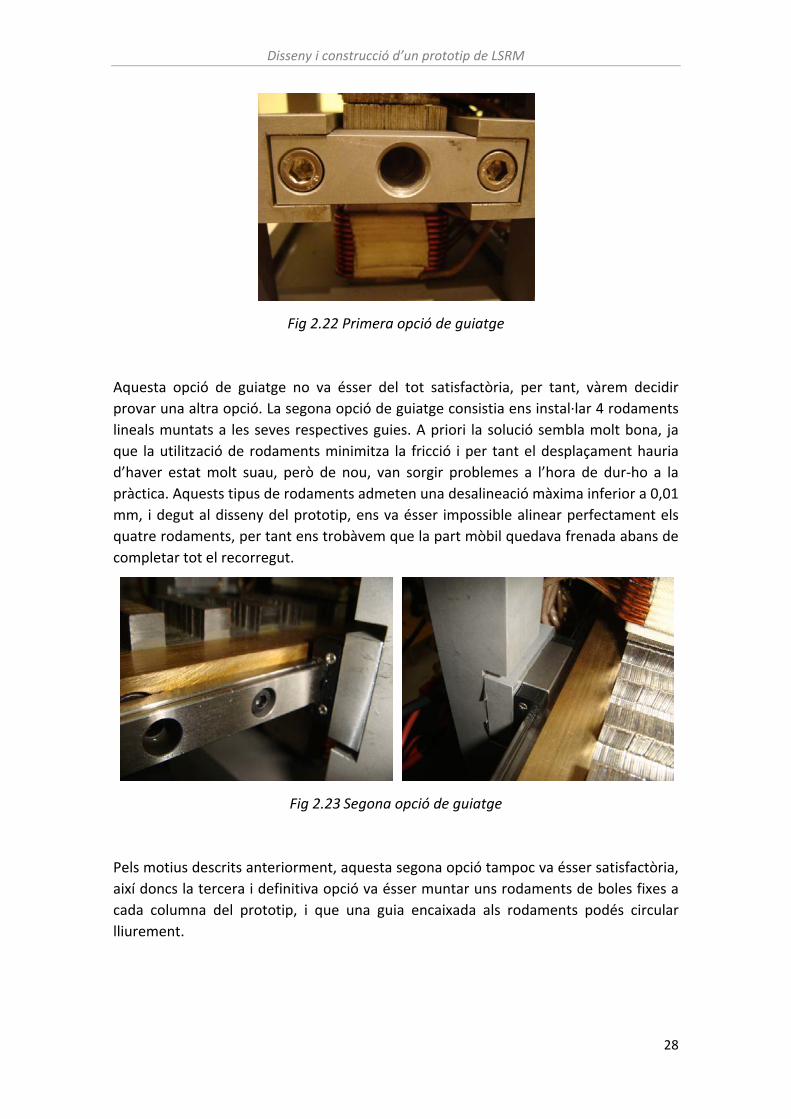
Fig 2.22 Primera opció de guiatge
Aquesta opció de guiatge no va ésser del tot satisfactòria, per tant, vàrem decidir
provar una altra opció. La segona opció de guiatge consistia ens instal∙lar 4 rodaments
lineals muntats a les seves respectives guies. A priori la solució sembla molt bona, ja
que la utilització de rodaments minimitza la fricció i per tant el desplaçament hauria
d’haver estat molt suau, però de nou, van sorgir problemes a l’hora de dur‐ho a la
pràctica. Aquests tipus de rodaments admeten una desalineació màxima inferior a 0,01
mm, i degut al disseny del prototip, ens va ésser impossible alinear perfectament els
quatre rodaments, per tant ens trobàvem que la part mòbil quedava frenada abans de
completar tot el recorregut.
Fig 2.23 Segona opció de guiatge
Pels motius descrits anteriorment, aquesta segona opció tampoc va ésser satisfactòria,
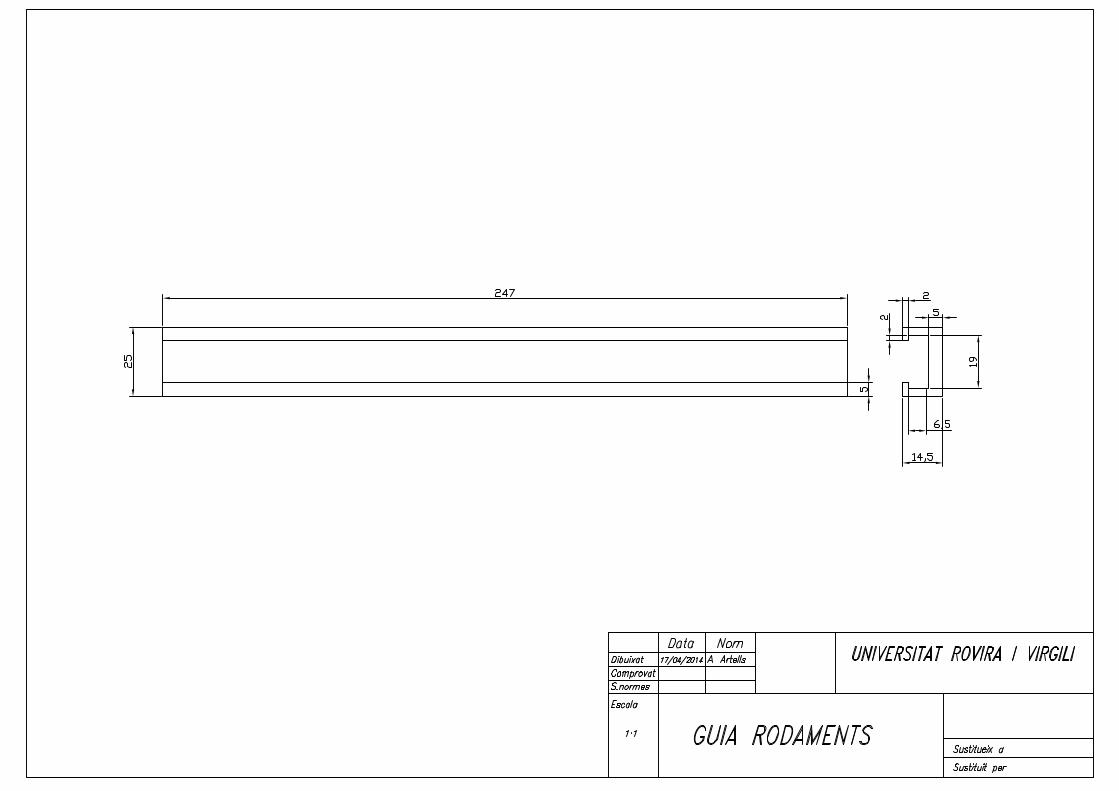
així doncs la tercera i definitiva opció va ésser muntar uns rodaments de boles fixes a
cada columna del prototip, i que una guia encaixada als rodaments podés circular
lliurement.
Disseny i construcció d’un prototip de LSRM
29
Fig 2.24 Guiatge definitiu
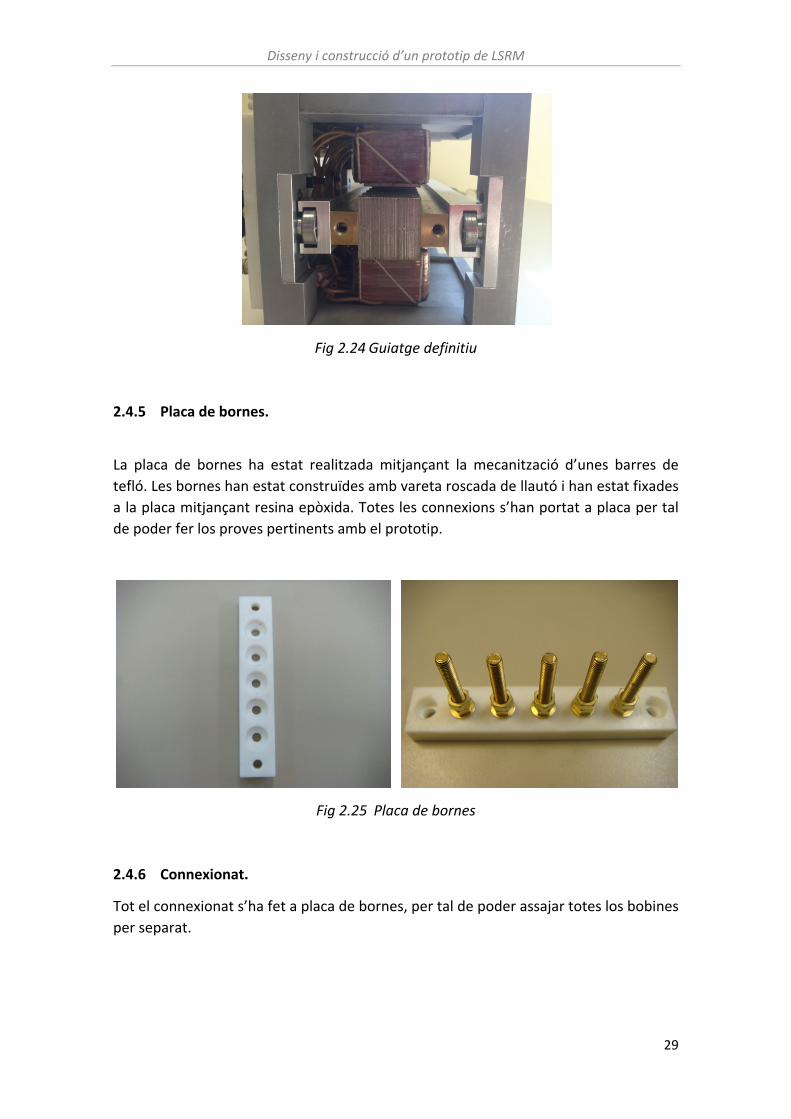
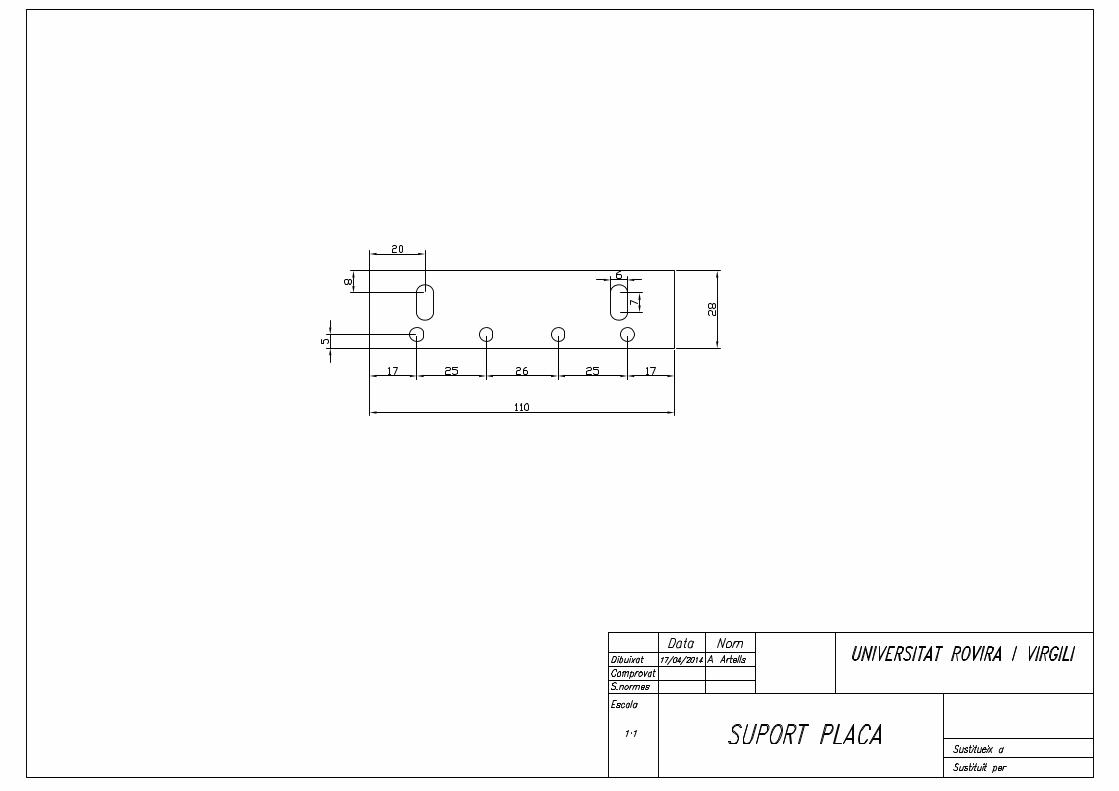
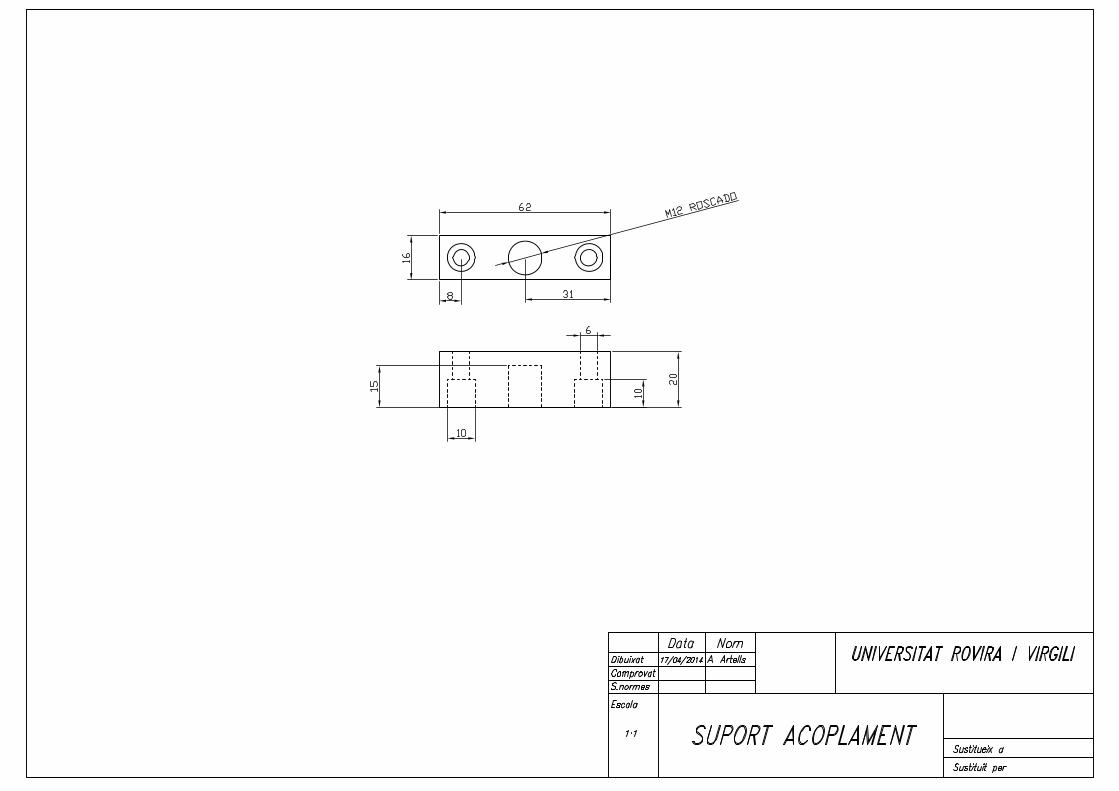
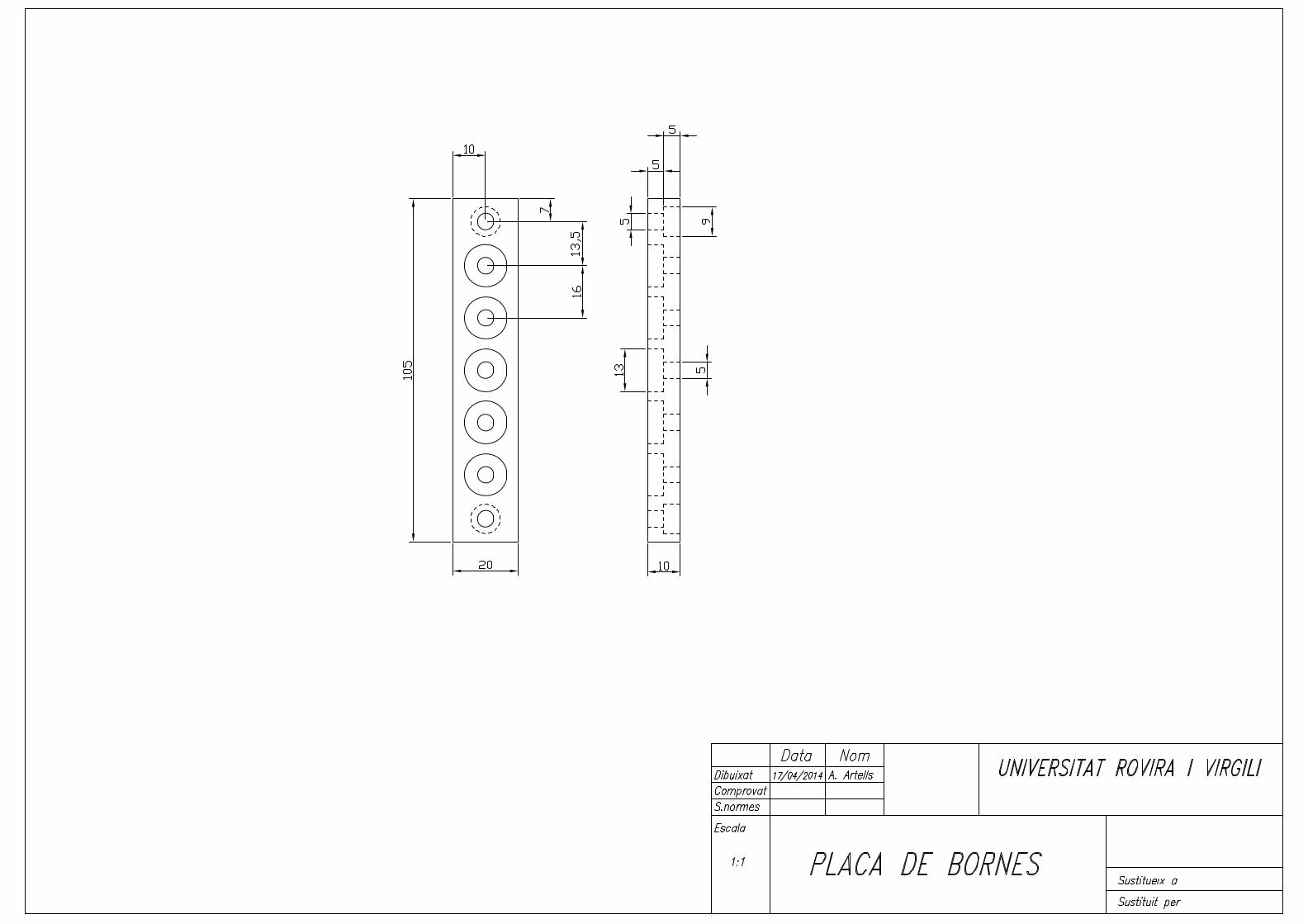
2.4.5 Placa de bornes.
La placa de bornes ha estat realitzada mitjançant la mecanització d’unes barres de
tefló. Les bornes han estat construïdes amb vareta roscada de llautó i han estat fixades
a la placa mitjançant resina epòxida. Totes les connexions s’han portat a placa per tal
de poder fer los proves pertinents amb el prototip.
Fig 2.25 Placa de bornes
2.4.6 Connexionat.
Tot el connexionat s’ha fet a placa de bornes, per tal de poder assajar totes los bobines
per separat.
Disseny i construcció d’un prototip de LSRM
30
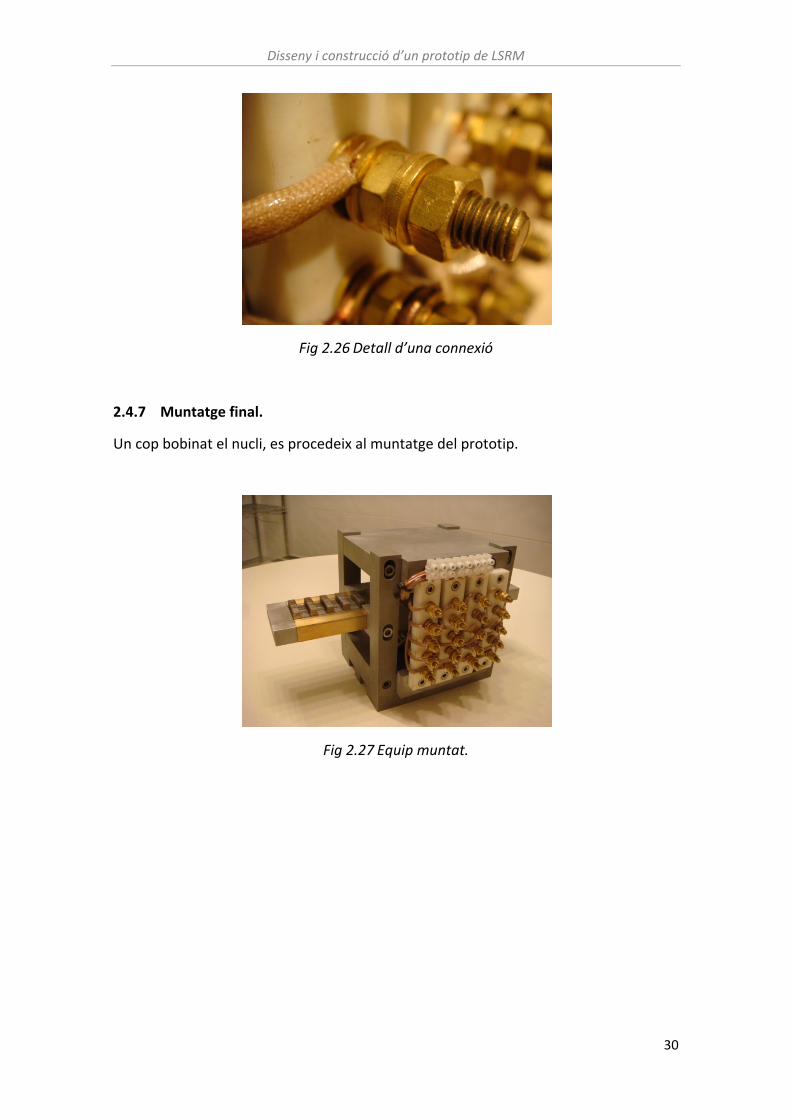
Fig 2.26 Detall d’una connexió
2.4.7 Muntatge final.
Un cop bobinat el nucli, es procedeix al muntatge del prototip.
Fig 2.27 Equip muntat.

Disseny i construcció d’un prototip de LSRM
31
Capítol 3 : Assaig i posta en marxa del LSRM En aquest capítol es presenten els resultats dels assajos elèctrics, magnètics, mecànics i tèrmics realitzats al prototip, així com la posta en marxa.
3.1. Assajos magnètics i mecànics. La figura 3.1 mostra el conjunt experimental que conforma la plataforma d’assaig per a la determinació de la característica de la força estàtica en funció de la posició de la part mòbil i de la corrent. La figura 3.2 mostra el detall del sensor de força i el sensor de corrent. El sensor de força el formen una cel∙la de càrrega Utilcell model 240 i un transmissor digital / analògic de la mateixa marca, model DAT400. El sensor de corrent es basa en un sensor d’efecte Hall que permet mesurar tant corrent continua com alterna en sistemes de potència. El sensor utilitzat és de la marca Honeywell model CSLA1CD.
Fig. 3.1 Vista del banc de proves
Per a calcular el flux concatenat en funció de la posició de la part mòbil i de la corrent, hem d’alimentar una de les fases amb corrent altern sinusoïdal, amb el que els valors eficaços de les caigudes de tensió compliran:
222 ˆ= R·I + ·
2U
Fig. 3.2 Detall de la cela de càrrega Fig. 3.3 Detall del sensor de corrent
Disseny i construcció d’un prototip de LSRM
32
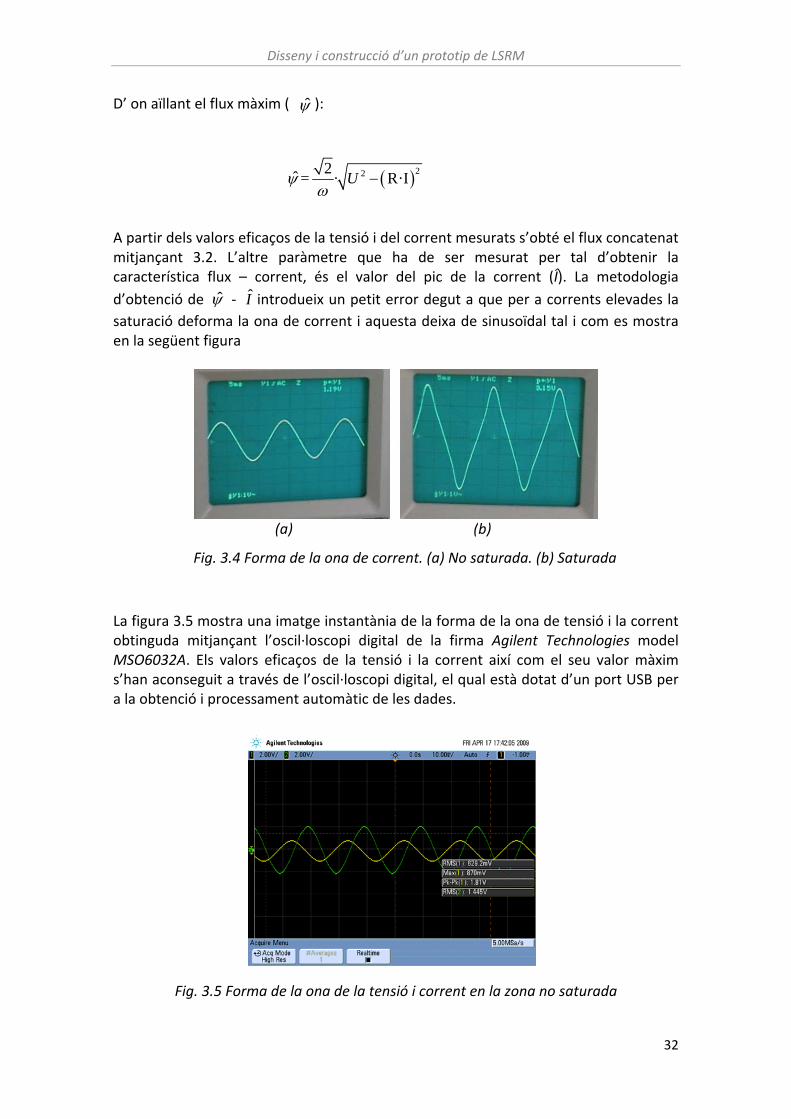
D’ on aïllant el flux màxim ( ): A partir dels valors eficaços de la tensió i del corrent mesurats s’obté el flux concatenat mitjançant 3.2. L’altre paràmetre que ha de ser mesurat per tal d’obtenir la característica flux – corrent, és el valor del pic de la corrent (Î). La metodologia
d’obtenció de ‐ introdueix un petit error degut a que per a corrents elevades la
saturació deforma la ona de corrent i aquesta deixa de sinusoïdal tal i com es mostra en la següent figura
La figura 3.5 mostra una imatge instantània de la forma de la ona de tensió i la corrent obtinguda mitjançant l’oscil∙loscopi digital de la firma Agilent Technologies model MSO6032A. Els valors eficaços de la tensió i la corrent així com el seu valor màxim s’han aconseguit a través de l’oscil∙loscopi digital, el qual està dotat d’un port USB per a la obtenció i processament automàtic de les dades.
Fig. 3.5 Forma de la ona de la tensió i corrent en la zona no saturada
I
222ˆ = · R·IU
Fig. 3.4 Forma de la ona de corrent. (a) No saturada. (b) Saturada
(a) (b)
Disseny i construcció d’un prototip de LSRM
33
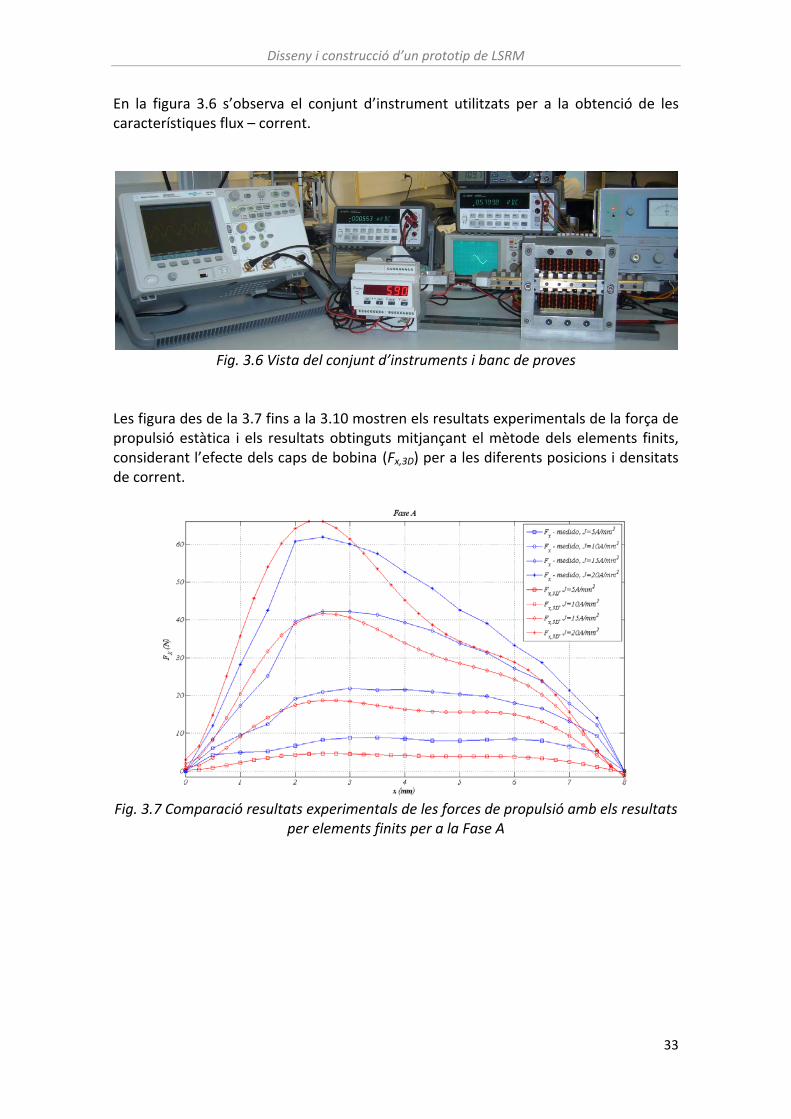
En la figura 3.6 s’observa el conjunt d’instrument utilitzats per a la obtenció de les característiques flux – corrent.
Fig. 3.6 Vista del conjunt d’instruments i banc de proves
Les figura des de la 3.7 fins a la 3.10 mostren els resultats experimentals de la força de propulsió estàtica i els resultats obtinguts mitjançant el mètode dels elements finits, considerant l’efecte dels caps de bobina (Fx,3D) per a les diferents posicions i densitats de corrent.
Fig. 3.7 Comparació resultats experimentals de les forces de propulsió amb els resultats
per elements finits per a la Fase A
Disseny i construcció d’un prototip de LSRM
34
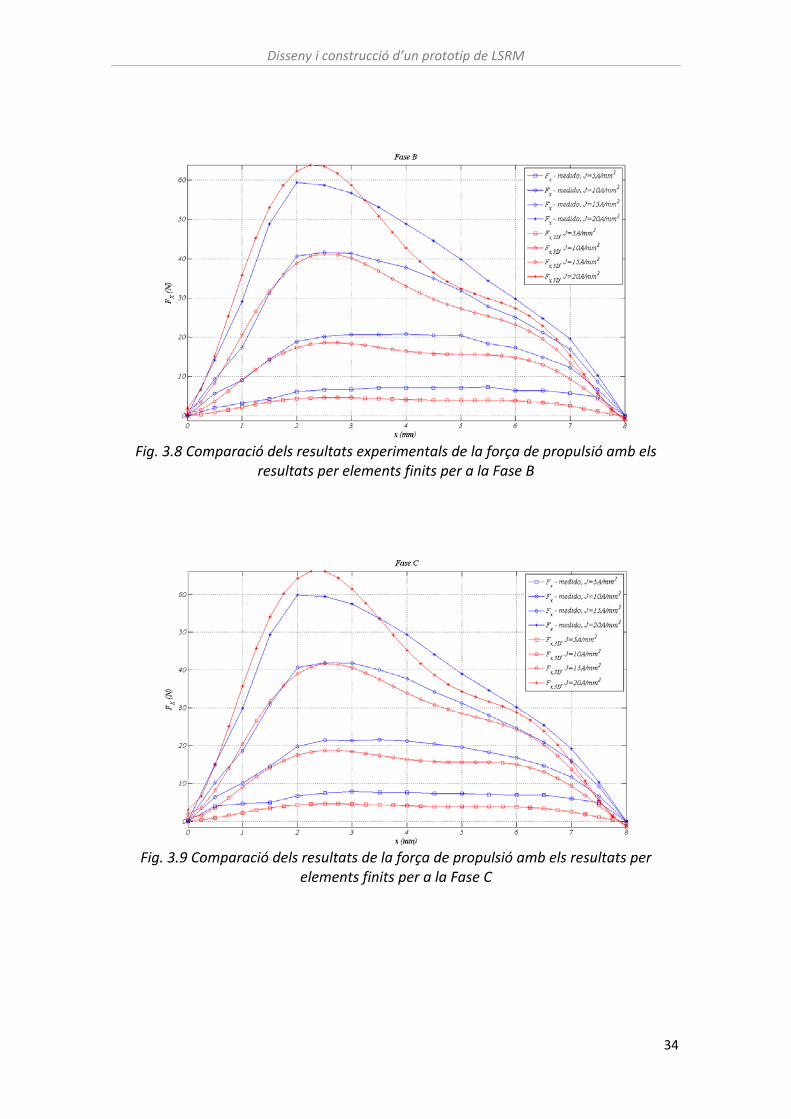
Fig. 3.8 Comparació dels resultats experimentals de la força de propulsió amb els
resultats per elements finits per a la Fase B
Fig. 3.9 Comparació dels resultats de la força de propulsió amb els resultats per
elements finits per a la Fase C
Disseny i construcció d’un prototip de LSRM
35
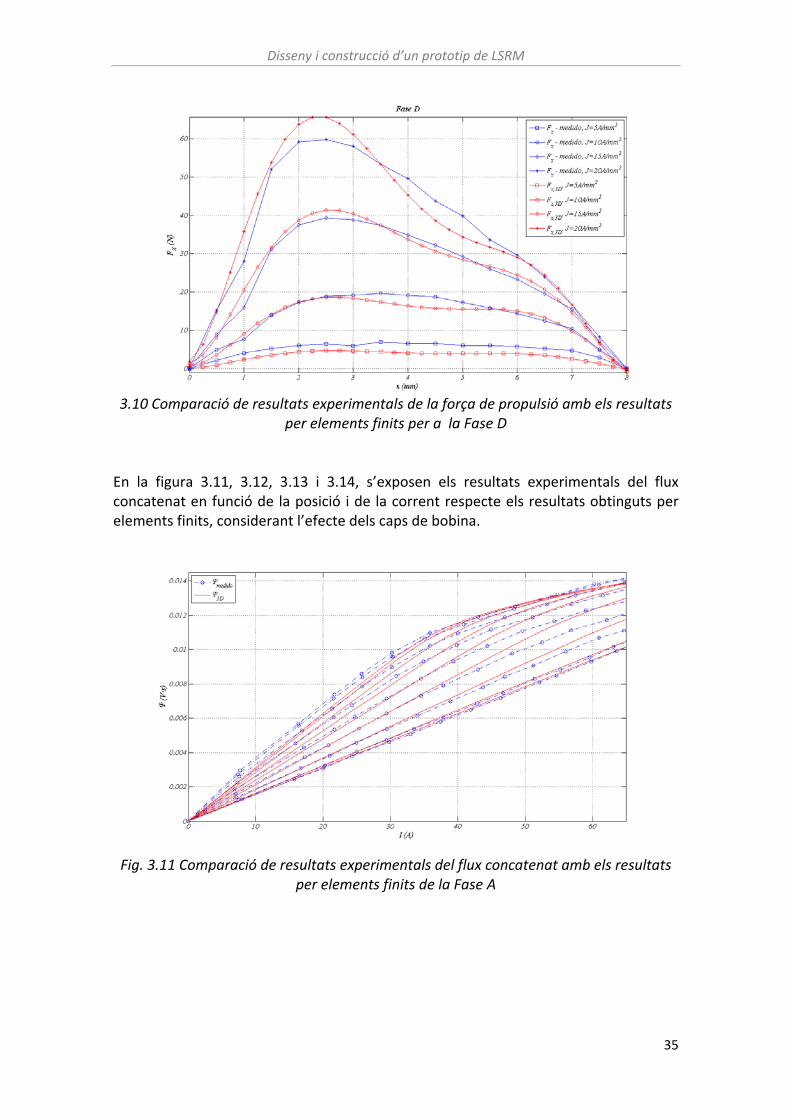
3.10 Comparació de resultats experimentals de la força de propulsió amb els resultats
per elements finits per a la Fase D
En la figura 3.11, 3.12, 3.13 i 3.14, s’exposen els resultats experimentals del flux concatenat en funció de la posició i de la corrent respecte els resultats obtinguts per elements finits, considerant l’efecte dels caps de bobina.
Fig. 3.11 Comparació de resultats experimentals del flux concatenat amb els resultats
per elements finits de la Fase A

Disseny i construcció d’un prototip de LSRM
36
Fig. 3.12 Comparació de resultats experimentals del flux concatenat amb els resultats
per elements finits de la Fase B
Fig. 3.13 Comparació de resultats experimentals del flux concatenat amb els resultats
per elements finits de la Fase C
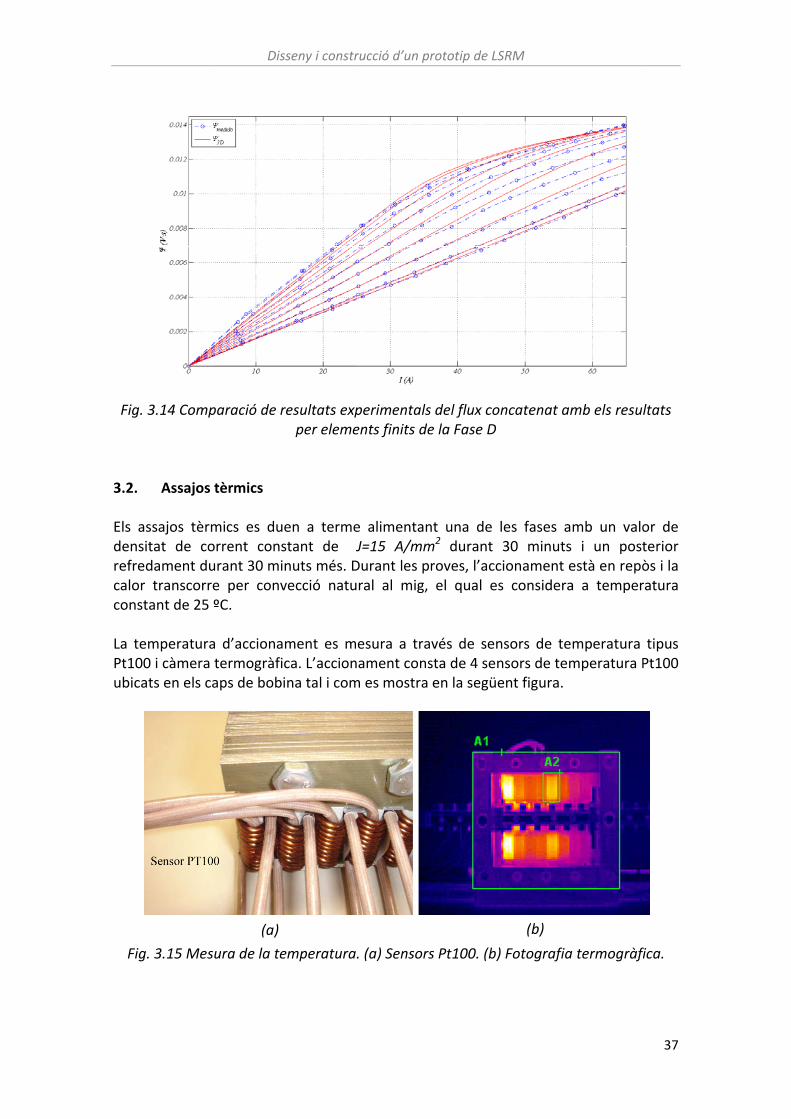
Fig.
3.2.
Els adensrefrecalorcons La tePt10ubica
Fig
3.14 Comp
Assajos t
assajos tèrmsitat de coedament dur transcorretant de 25 º
emperatura0 i càmera tats en els ca
g. 3.15 Mesu
Diss
paració de r
tèrmics
mics es dueorrent consurant 30 mine per convºC.
a d’accionamtermogràficaps de bobi
ura de la te
(a)
seny i constr
esultats expper eleme
en a termestant de Jnuts més. Dvecció natu
ment es mca. L’accionna tal i com
emperatura.
rucció d’un p
perimentalsents finits de
e alimentanJ=15 A/mmDurant les pral al mig,
esura a traament cons
m es mostra
. (a) Sensors
rototip de LS
s del flux coe la Fase D
nt una de m2 durant roves, l’accel qual es
avés de sensta de 4 senen la següe
s Pt100. (b)
SRM
ncatenat am
les fases a30 minuts cionament es considera
nsors de tensors de tement figura.
) Fotografia
(b)
mb els resul
mb un valoi un post
està en repòa a temper
mperatura mperatura P
a termogràfi
37
ltats
or de terior òs i la ratura
tipus Pt100
fica.
Disseny i construcció d’un prototip de LSRM
38
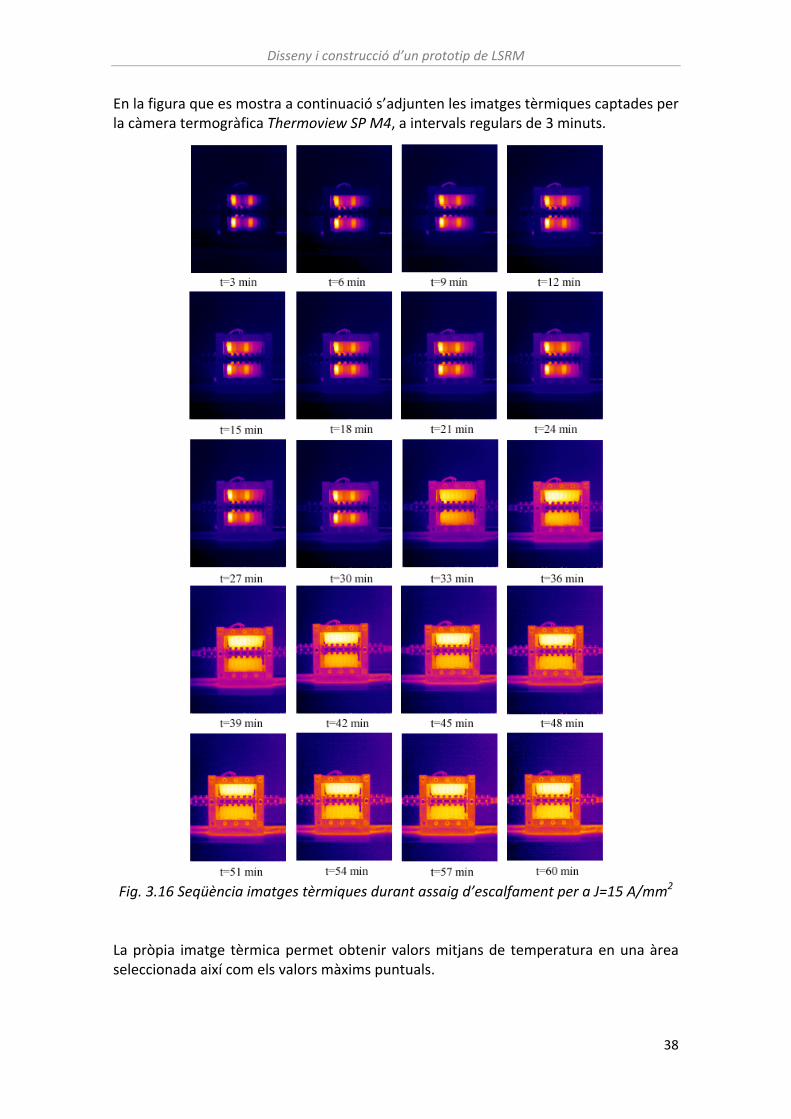
En la figura que es mostra a continuació s’adjunten les imatges tèrmiques captades per la càmera termogràfica Thermoview SP M4, a intervals regulars de 3 minuts.
Fig. 3.16 Seqüència imatges tèrmiques durant assaig d’escalfament per a J=15 A/mm2 La pròpia imatge tèrmica permet obtenir valors mitjans de temperatura en una àrea seleccionada així com els valors màxims puntuals.
Disseny i construcció d’un prototip de LSRM
39
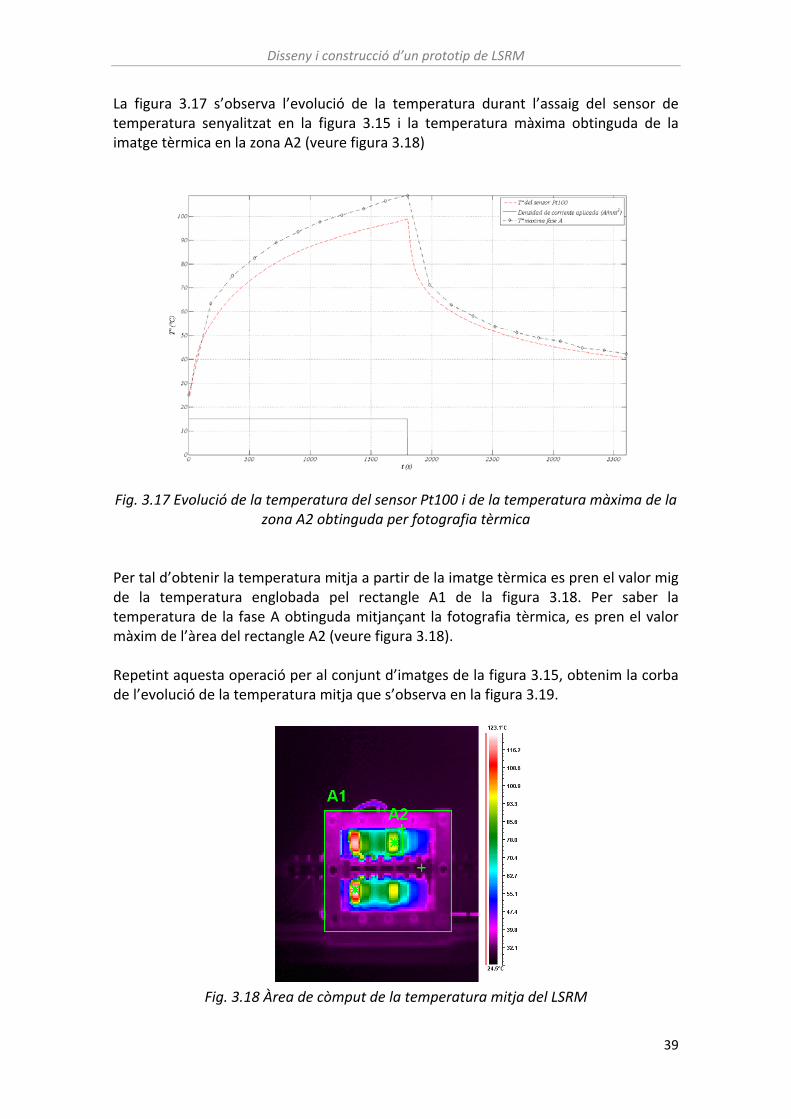
La figura 3.17 s’observa l’evolució de la temperatura durant l’assaig del sensor de temperatura senyalitzat en la figura 3.15 i la temperatura màxima obtinguda de la imatge tèrmica en la zona A2 (veure figura 3.18)
Fig. 3.17 Evolució de la temperatura del sensor Pt100 i de la temperatura màxima de la
zona A2 obtinguda per fotografia tèrmica
Per tal d’obtenir la temperatura mitja a partir de la imatge tèrmica es pren el valor mig de la temperatura englobada pel rectangle A1 de la figura 3.18. Per saber la temperatura de la fase A obtinguda mitjançant la fotografia tèrmica, es pren el valor màxim de l’àrea del rectangle A2 (veure figura 3.18). Repetint aquesta operació per al conjunt d’imatges de la figura 3.15, obtenim la corba de l’evolució de la temperatura mitja que s’observa en la figura 3.19.
Fig. 3.18 Àrea de còmput de la temperatura mitja del LSRM
Disseny i construcció d’un prototip de LSRM
40
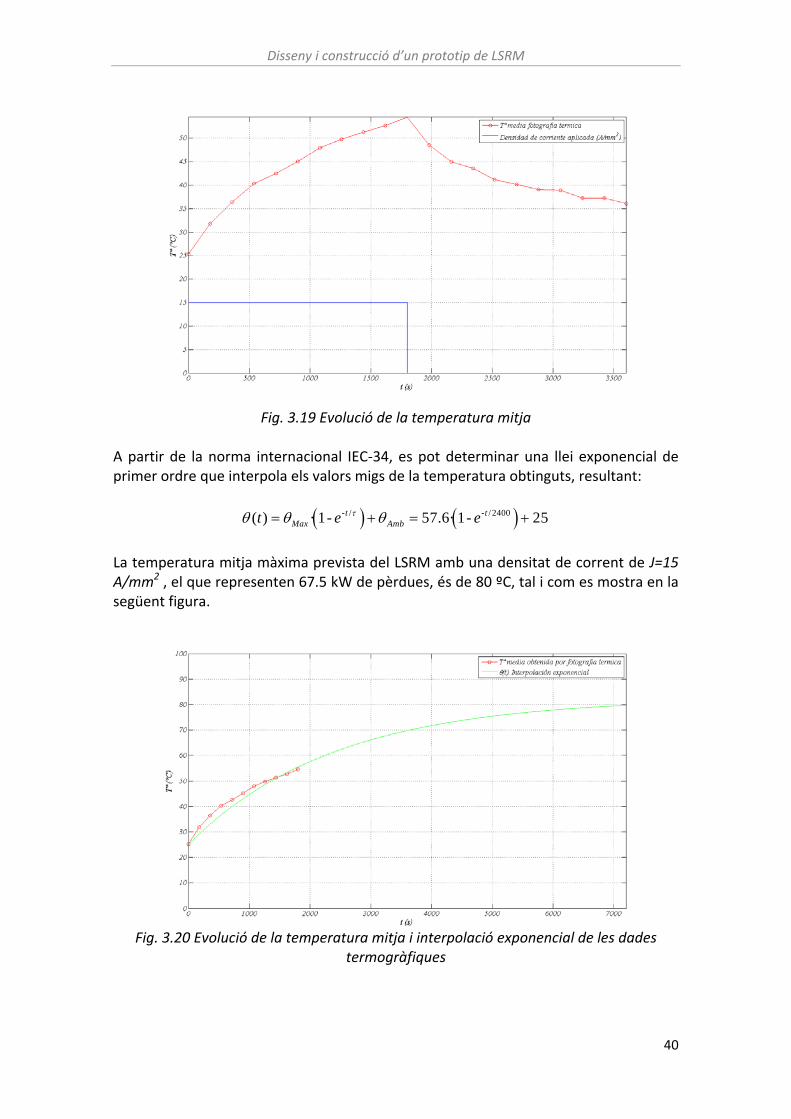
Fig. 3.19 Evolució de la temperatura mitja
A partir de la norma internacional IEC‐34, es pot determinar una llei exponencial de primer ordre que interpola els valors migs de la temperatura obtinguts, resultant:
- / - / 2400( ) · 1- 57.6· 1- 25t tMax Ambt e e
La temperatura mitja màxima prevista del LSRM amb una densitat de corrent de J=15 A/mm2 , el que representen 67.5 kW de pèrdues, és de 80 ºC, tal i com es mostra en la següent figura.
Fig. 3.20 Evolució de la temperatura mitja i interpolació exponencial de les dades
termogràfiques
Disseny i construcció d’un prototip de LSRM
41
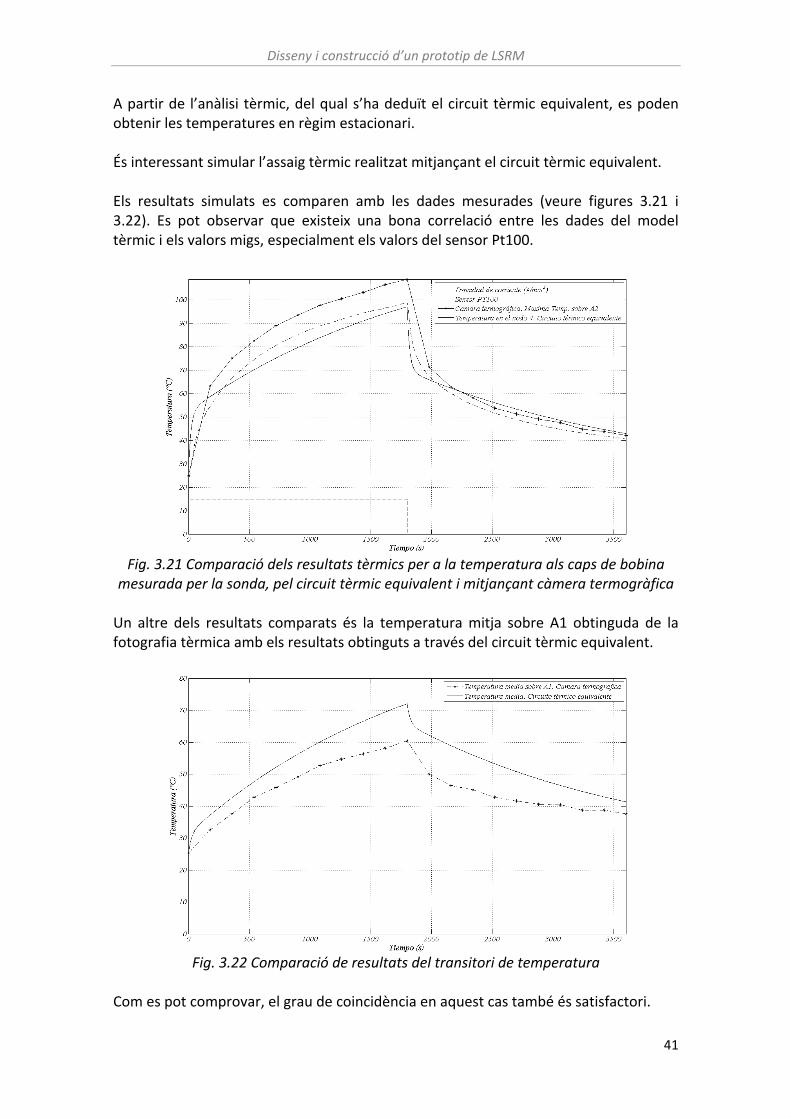
A partir de l’anàlisi tèrmic, del qual s’ha deduït el circuit tèrmic equivalent, es poden obtenir les temperatures en règim estacionari. És interessant simular l’assaig tèrmic realitzat mitjançant el circuit tèrmic equivalent. Els resultats simulats es comparen amb les dades mesurades (veure figures 3.21 i 3.22). Es pot observar que existeix una bona correlació entre les dades del model tèrmic i els valors migs, especialment els valors del sensor Pt100.
Fig. 3.21 Comparació dels resultats tèrmics per a la temperatura als caps de bobina
mesurada per la sonda, pel circuit tèrmic equivalent i mitjançant càmera termogràfica
Un altre dels resultats comparats és la temperatura mitja sobre A1 obtinguda de la fotografia tèrmica amb els resultats obtinguts a través del circuit tèrmic equivalent.
Fig. 3.22 Comparació de resultats del transitori de temperatura
Com es pot comprovar, el grau de coincidència en aquest cas també és satisfactori.
Disseny i construcció d’un prototip de LSRM
42
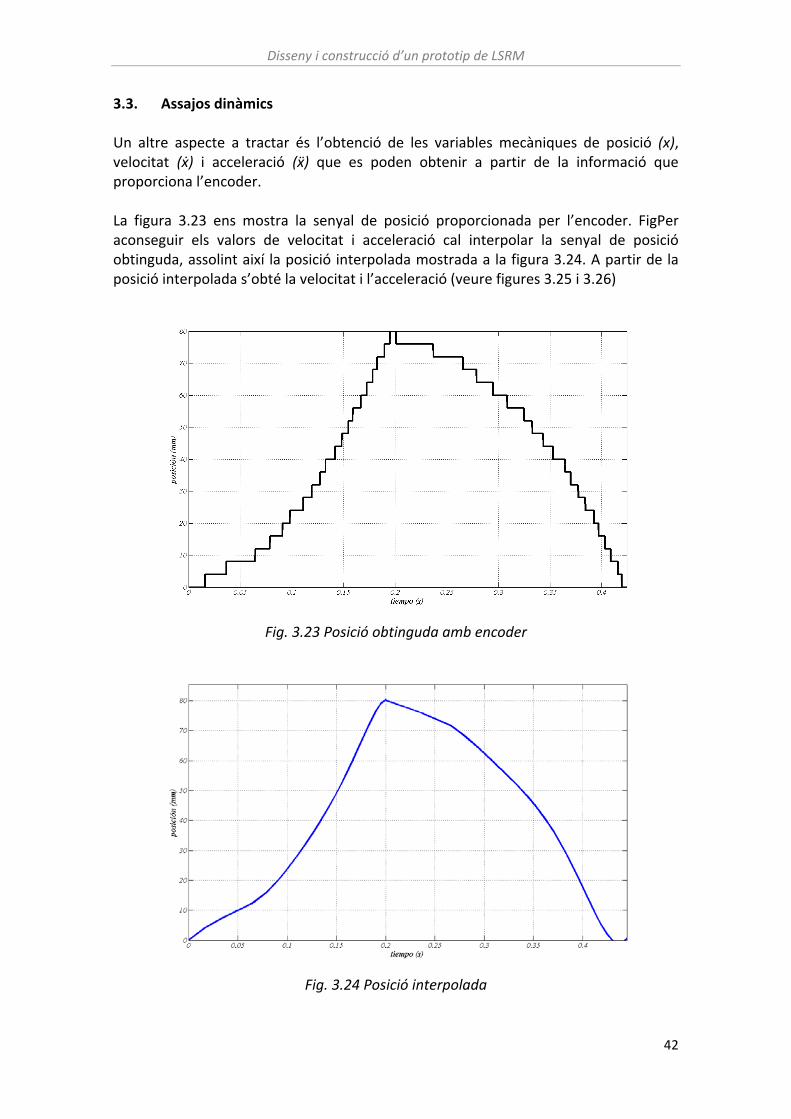
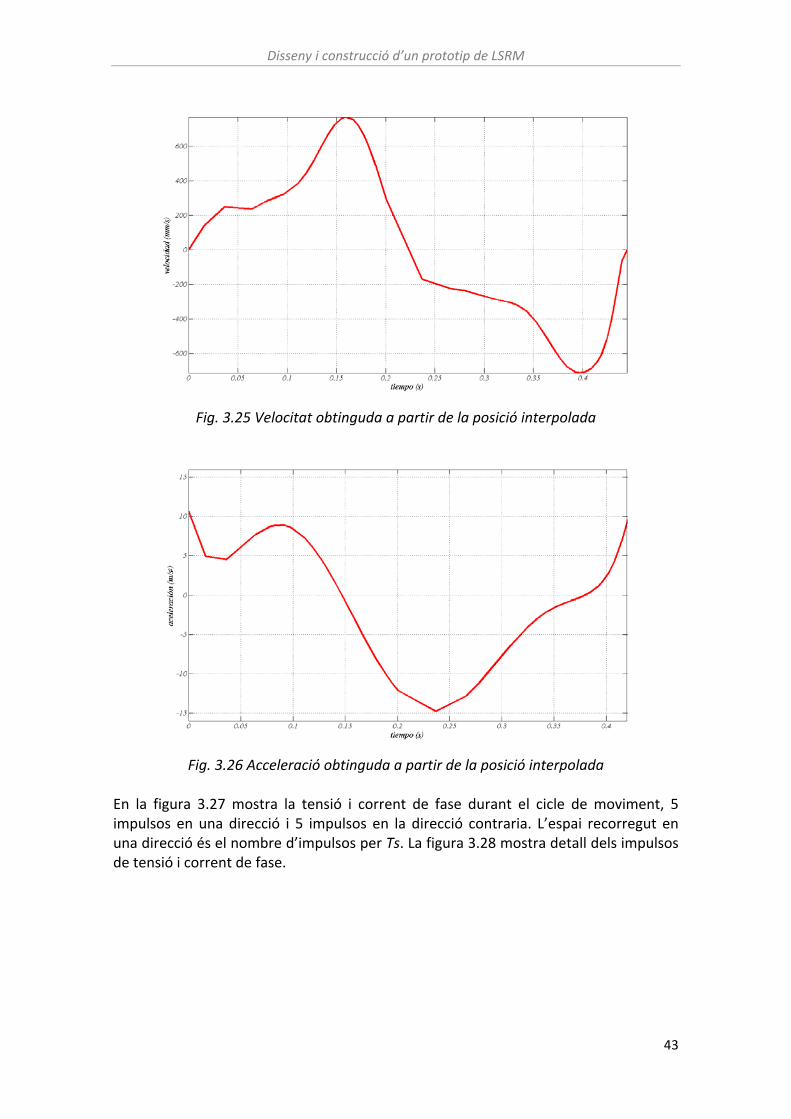
3.3. Assajos dinàmics Un altre aspecte a tractar és l’obtenció de les variables mecàniques de posició (x), velocitat (ẋ) i acceleració (ẍ) que es poden obtenir a partir de la informació que proporciona l’encoder. La figura 3.23 ens mostra la senyal de posició proporcionada per l’encoder. FigPer aconseguir els valors de velocitat i acceleració cal interpolar la senyal de posició obtinguda, assolint així la posició interpolada mostrada a la figura 3.24. A partir de la posició interpolada s’obté la velocitat i l’acceleració (veure figures 3.25 i 3.26)
Fig. 3.23 Posició obtinguda amb encoder
Fig. 3.24 Posició interpolada
Disseny i construcció d’un prototip de LSRM
43
Fig. 3.25 Velocitat obtinguda a partir de la posició interpolada
Fig. 3.26 Acceleració obtinguda a partir de la posició interpolada
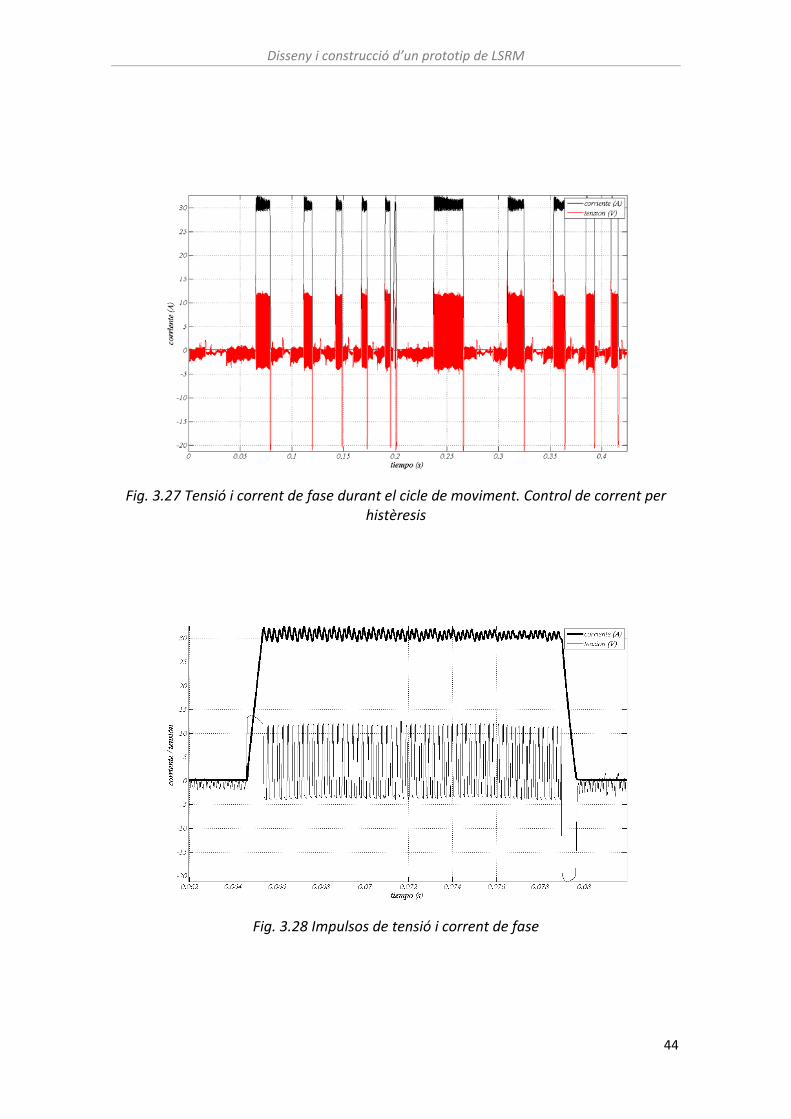
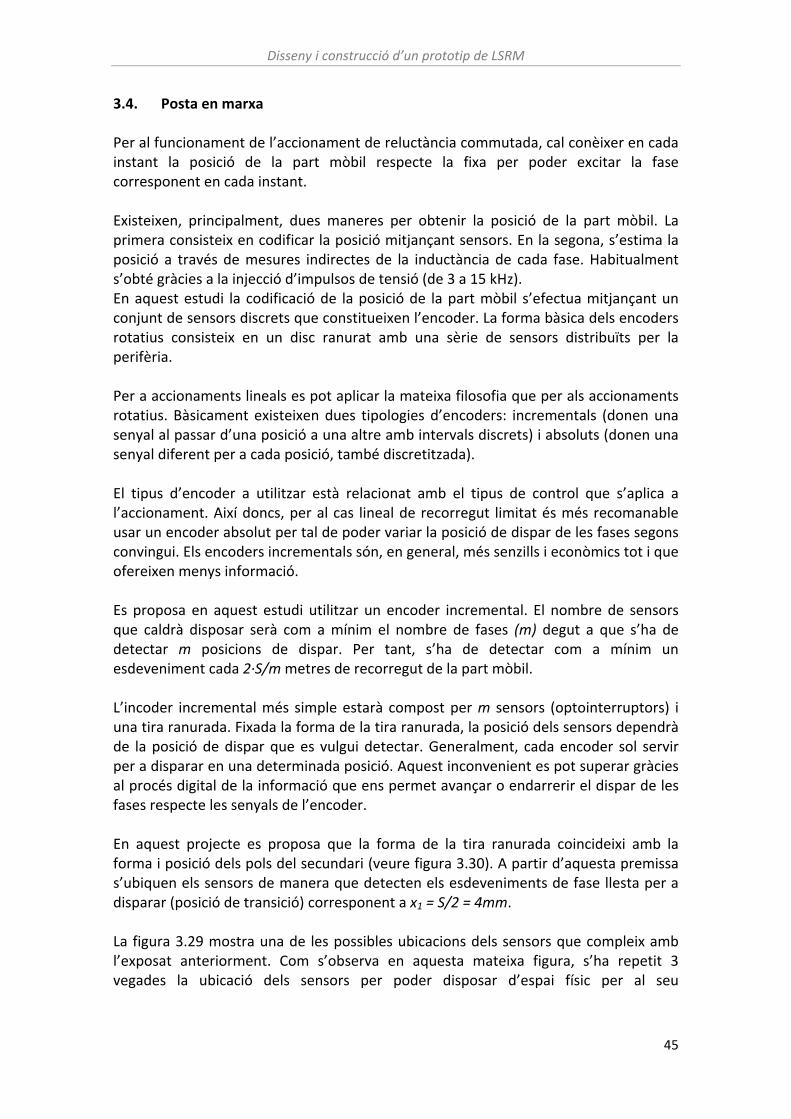
En la figura 3.27 mostra la tensió i corrent de fase durant el cicle de moviment, 5 impulsos en una direcció i 5 impulsos en la direcció contraria. L’espai recorregut en una direcció és el nombre d’impulsos per Ts. La figura 3.28 mostra detall dels impulsos de tensió i corrent de fase.
Disseny i construcció d’un prototip de LSRM
44
Fig. 3.27 Tensió i corrent de fase durant el cicle de moviment. Control de corrent per
histèresis
Fig. 3.28 Impulsos de tensió i corrent de fase
Disseny i construcció d’un prototip de LSRM
45
3.4. Posta en marxa
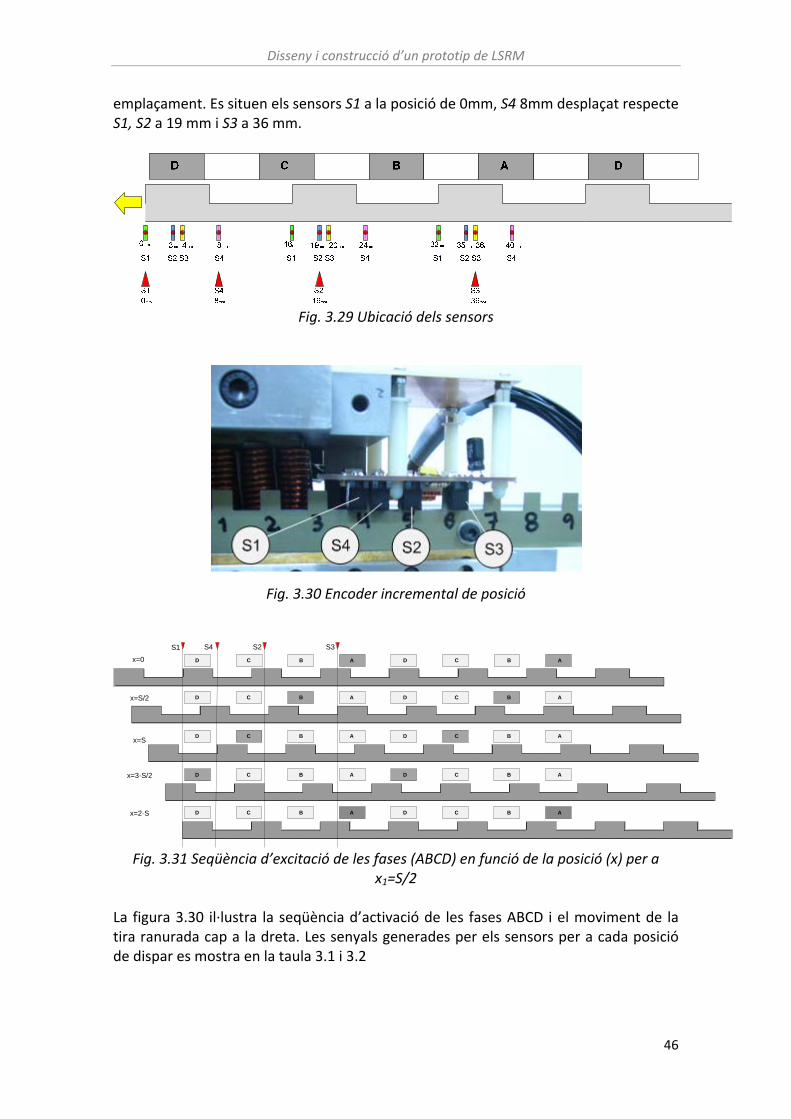
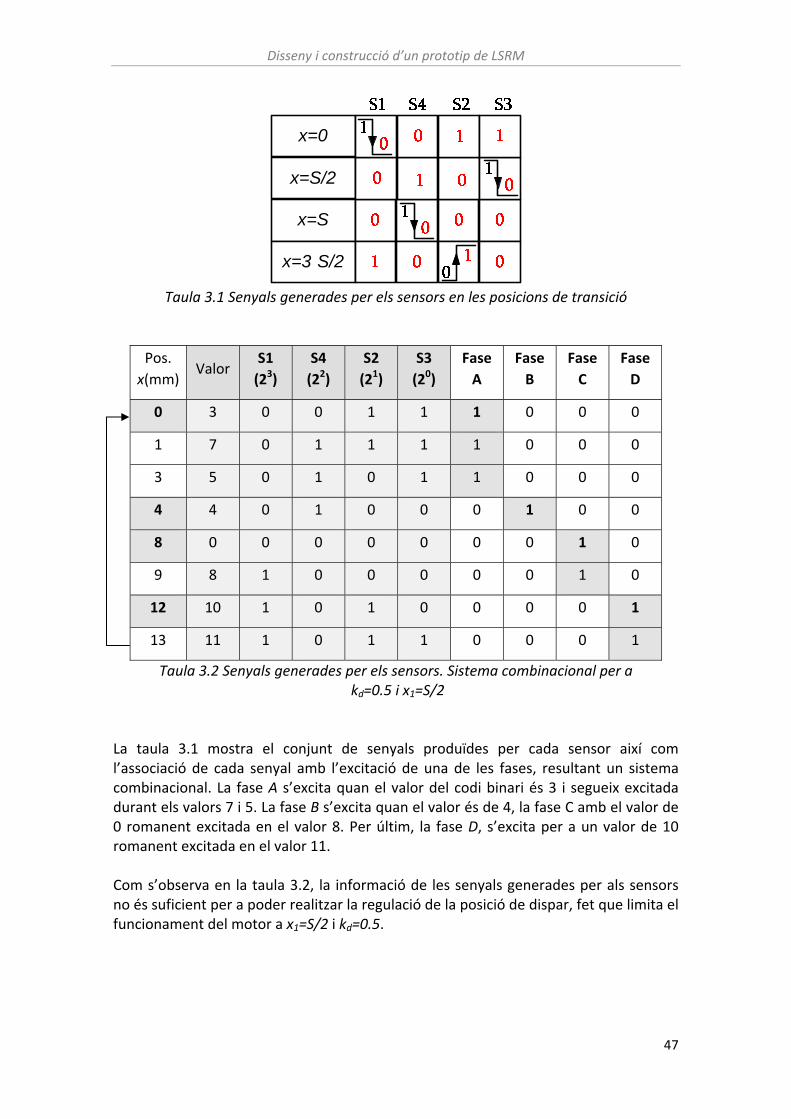
Per al funcionament de l’accionament de reluctància commutada, cal conèixer en cada instant la posició de la part mòbil respecte la fixa per poder excitar la fase corresponent en cada instant. Existeixen, principalment, dues maneres per obtenir la posició de la part mòbil. La primera consisteix en codificar la posició mitjançant sensors. En la segona, s’estima la posició a través de mesures indirectes de la inductància de cada fase. Habitualment s’obté gràcies a la injecció d’impulsos de tensió (de 3 a 15 kHz). En aquest estudi la codificació de la posició de la part mòbil s’efectua mitjançant un conjunt de sensors discrets que constitueixen l’encoder. La forma bàsica dels encoders rotatius consisteix en un disc ranurat amb una sèrie de sensors distribuïts per la perifèria. Per a accionaments lineals es pot aplicar la mateixa filosofia que per als accionaments rotatius. Bàsicament existeixen dues tipologies d’encoders: incrementals (donen una senyal al passar d’una posició a una altre amb intervals discrets) i absoluts (donen una senyal diferent per a cada posició, també discretitzada). El tipus d’encoder a utilitzar està relacionat amb el tipus de control que s’aplica a l’accionament. Així doncs, per al cas lineal de recorregut limitat és més recomanable usar un encoder absolut per tal de poder variar la posició de dispar de les fases segons convingui. Els encoders incrementals són, en general, més senzills i econòmics tot i que ofereixen menys informació. Es proposa en aquest estudi utilitzar un encoder incremental. El nombre de sensors que caldrà disposar serà com a mínim el nombre de fases (m) degut a que s’ha de detectar m posicions de dispar. Per tant, s’ha de detectar com a mínim un esdeveniment cada 2∙S/m metres de recorregut de la part mòbil. L’incoder incremental més simple estarà compost per m sensors (optointerruptors) i una tira ranurada. Fixada la forma de la tira ranurada, la posició dels sensors dependrà de la posició de dispar que es vulgui detectar. Generalment, cada encoder sol servir per a disparar en una determinada posició. Aquest inconvenient es pot superar gràcies al procés digital de la informació que ens permet avançar o endarrerir el dispar de les fases respecte les senyals de l’encoder. En aquest projecte es proposa que la forma de la tira ranurada coincideixi amb la forma i posició dels pols del secundari (veure figura 3.30). A partir d’aquesta premissa s’ubiquen els sensors de manera que detecten els esdeveniments de fase llesta per a disparar (posició de transició) corresponent a x1 = S/2 = 4mm. La figura 3.29 mostra una de les possibles ubicacions dels sensors que compleix amb l’exposat anteriorment. Com s’observa en aquesta mateixa figura, s’ha repetit 3 vegades la ubicació dels sensors per poder disposar d’espai físic per al seu
Disseny i construcció d’un prototip de LSRM
46
emplaçament. Es situen els sensors S1 a la posició de 0mm, S4 8mm desplaçat respecte S1, S2 a 19 mm i S3 a 36 mm.
Fig. 3.29 Ubicació dels sensors
Fig. 3.30 Encoder incremental de posició
S1 S4 S2 S3
ABCD ABCD
ABCD ABCD
ABCD ABCD
ABCD ABCD
ABCD ABCD
x=0
x=S/2
x=S
x=3·S/2
x=2·S
Fig. 3.31 Seqüència d’excitació de les fases (ABCD) en funció de la posició (x) per a x1=S/2
La figura 3.30 il∙lustra la seqüència d’activació de les fases ABCD i el moviment de la tira ranurada cap a la dreta. Les senyals generades per els sensors per a cada posició de dispar es mostra en la taula 3.1 i 3.2
Disseny i construcció d’un prototip de LSRM
47
x=0
x=S/2
x=S
x=3·S/2
Taula 3.1 Senyals generades per els sensors en les posicions de transició
Pos.
x(mm) Valor
S1
(23)
S4
(22)
S2
(21)
S3
(20)
Fase
A
Fase
B
Fase
C
Fase
D
0 3 0 0 1 1 1 0 0 0
1 7 0 1 1 1 1 0 0 0
3 5 0 1 0 1 1 0 0 0
4 4 0 1 0 0 0 1 0 0
8 0 0 0 0 0 0 0 1 0
9 8 1 0 0 0 0 0 1 0
12 10 1 0 1 0 0 0 0 1
13 11 1 0 1 1 0 0 0 1
Taula 3.2 Senyals generades per els sensors. Sistema combinacional per a kd=0.5 i x1=S/2
La taula 3.1 mostra el conjunt de senyals produïdes per cada sensor així com l’associació de cada senyal amb l’excitació de una de les fases, resultant un sistema combinacional. La fase A s’excita quan el valor del codi binari és 3 i segueix excitada durant els valors 7 i 5. La fase B s’excita quan el valor és de 4, la fase C amb el valor de 0 romanent excitada en el valor 8. Per últim, la fase D, s’excita per a un valor de 10 romanent excitada en el valor 11. Com s’observa en la taula 3.2, la informació de les senyals generades per als sensors no és suficient per a poder realitzar la regulació de la posició de dispar, fet que limita el funcionament del motor a x1=S/2 i kd=0.5.
Disseny i construcció d’un prototip de LSRM
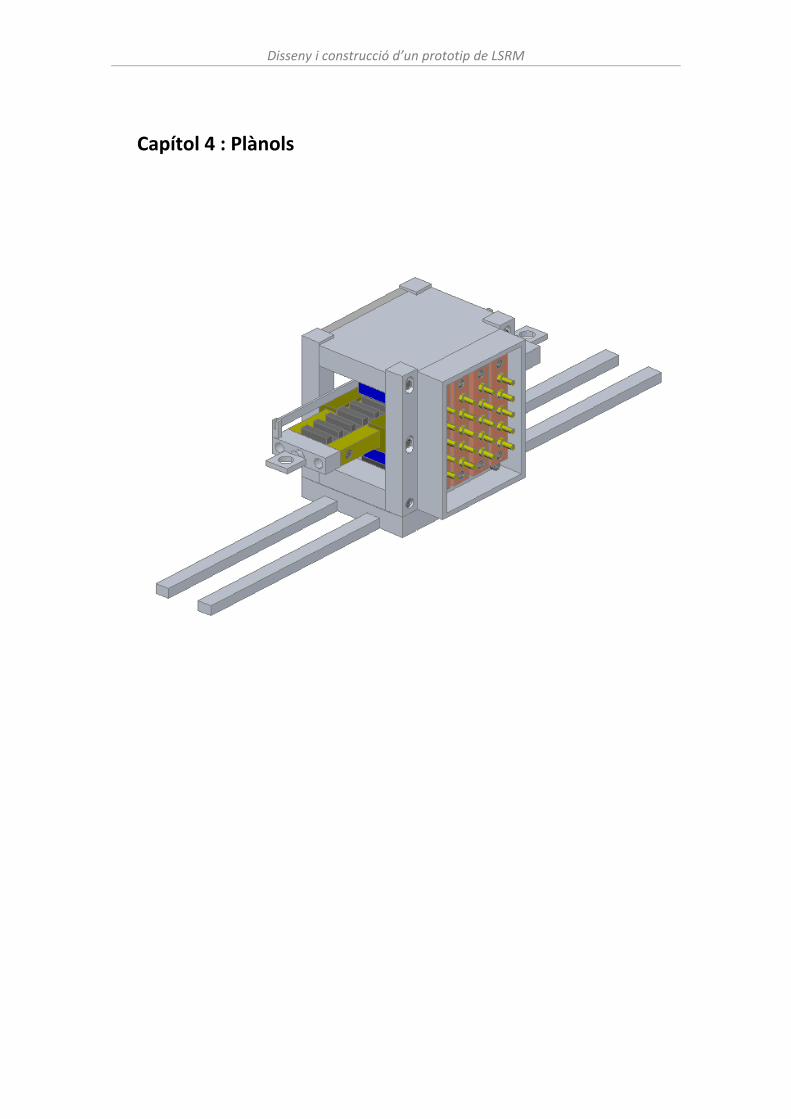
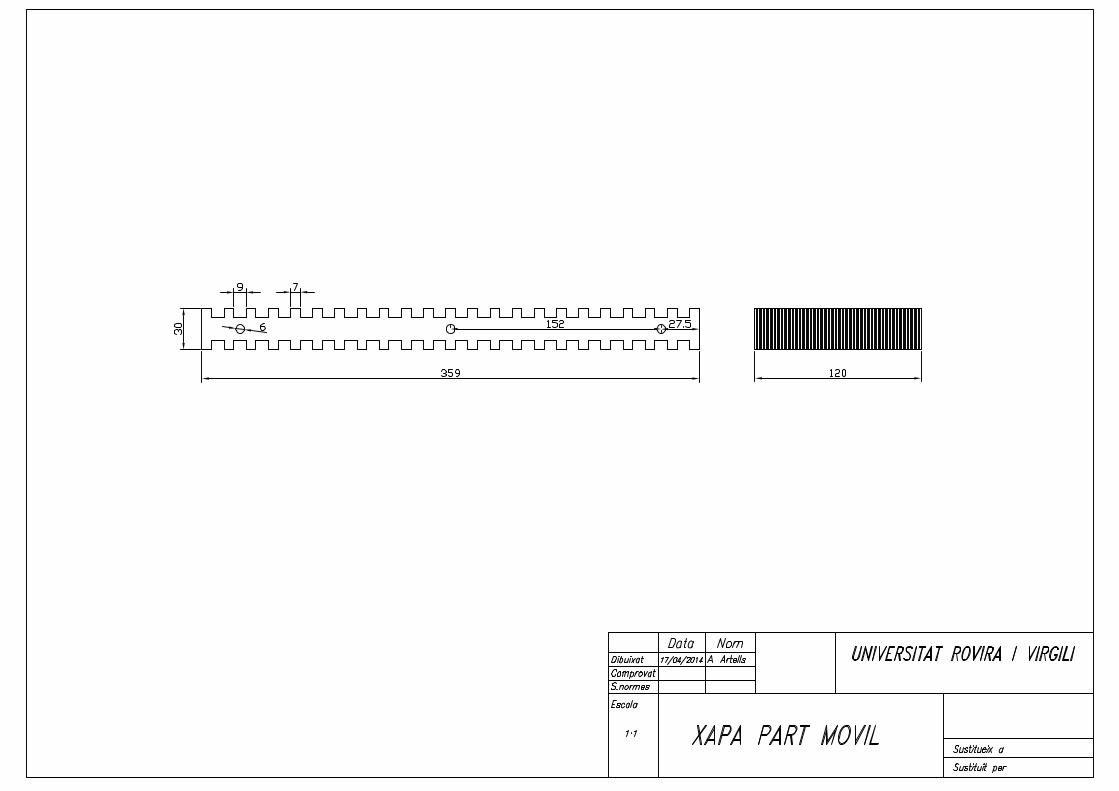
Capítol 4 : Plànols


Disseny i construcció d’un prototip de LSRM
Bibliografia ‐ Tesis doctoral “ Aportaciones al diseño y caracterización del motor lineal de
reluctancia autoconmutado” de Jordi Garcia Amorós.
‐ Artículo de revista UPC “Sensitivity Analysis of Geometrical Parameters on a Double‐Sided Linear Switched Reluctance Motor”

Disseny i construcció d’un prototip de LSRM
Annex: ‐ Fulls Tècnics de materials utilitzats.
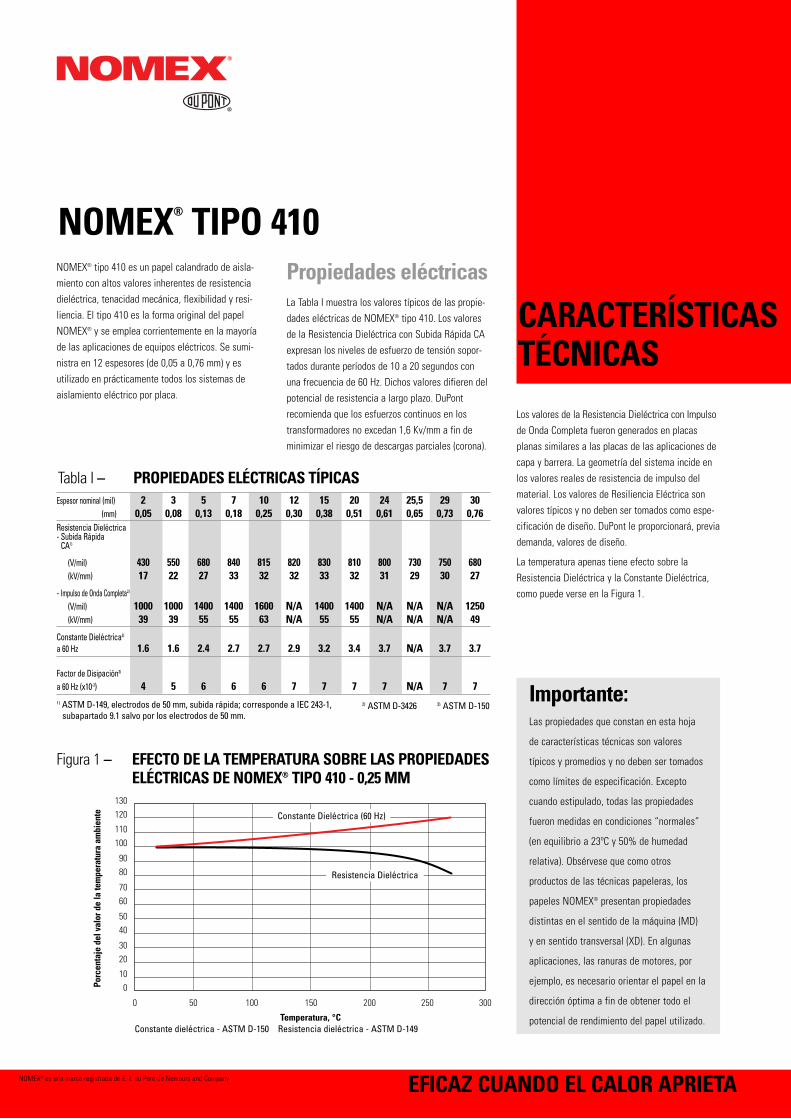
Los valores de la Resistencia Dieléctrica con Impulsode Onda Completa fueron generados en placasplanas similares a las placas de las aplicaciones decapa y barrera. La geometría del sistema incide enlos valores reales de resistencia de impulso delmaterial. Los valores de Resiliencia Eléctrica sonvalores típicos y no deben ser tomados como espe-cificación de diseño. DuPont le proporcionará, previademanda, valores de diseño.
La temperatura apenas tiene efecto sobre laResistencia Dieléctrica y la Constante Dieléctrica,como puede verse en la Figura 1.
0
20
40
60
80
100
120
10
30
50
70
90
110
130
0 50 100 150 200 250 300
NOMEX® tipo 410 es un papel calandrado de aisla-miento con altos valores inherentes de resistenciadieléctrica, tenacidad mecánica, flexibilidad y resi-liencia. El tipo 410 es la forma original del papelNOMEX® y se emplea corrientemente en la mayoríade las aplicaciones de equipos eléctricos. Se sumi-nistra en 12 espesores (de 0,05 a 0,76 mm) y esutilizado en prácticamente todos los sistemas deaislamiento eléctrico por placa.
Importante:Las propiedades que constan en esta hoja
de características técnicas son valores
típicos y promedios y no deben ser tomados
como límites de especificación. Excepto
cuando estipulado, todas las propiedades
fueron medidas en condiciones “normales”
(en equilibrio a 23ºC y 50% de humedad
relativa). Obsérvese que como otros
productos de las técnicas papeleras, los
papeles NOMEX® presentan propiedades
distintas en el sentido de la máquina (MD)
y en sentido transversal (XD). En algunas
aplicaciones, las ranuras de motores, por
ejemplo, es necesario orientar el papel en la
dirección óptima a fin de obtener todo el
potencial de rendimiento del papel utilizado.
Propiedades eléctricasLa Tabla I muestra los valores típicos de las propie-dades eléctricas de NOMEX® tipo 410. Los valoresde la Resistencia Dieléctrica con Subida Rápida CAexpresan los niveles de esfuerzo de tensión sopor-tados durante períodos de 10 a 20 segundos conuna frecuencia de 60 Hz. Dichos valores difieren delpotencial de resistencia a largo plazo. DuPontrecomienda que los esfuerzos continuos en lostransformadores no excedan 1,6 Kv/mm a fin deminimizar el riesgo de descargas parciales (corona).
CARACTERÍSTICASTÉCNICAS
NOMEX® TIPO 410
Tabla I – PROPIEDADES ELÉCTRICAS TÍPICAS
Figura 1 – EFECTO DE LA TEMPERATURA SOBRE LAS PROPIEDADESELÉCTRICAS DE NOMEX® TIPO 410 - 0,25 MM
Espesor nominal (mil) 2 3 5 7 10 12 15 20 24 25,5 29 30(mm) 0,05 0,08 0,13 0,18 0,25 0,30 0,38 0,51 0,61 0,65 0,73 0,76
Resistencia Dieléctrica- Subida Rápida
CA1)
(V/mil) 430 550 680 840 815 820 830 810 800 730 750 680(kV/mm) 17 22 27 33 32 32 33 32 31 29 30 27
- Impulso de Onda Completa2)
(V/mil) 1000 1000 1400 1400 1600 N/A 1400 1400 N/A N/A N/A 1250(kV/mm) 39 39 55 55 63 N/A 55 55 N/A N/A N/A 49
Constante Dieléctrica3)
a 60 Hz 1.6 1.6 2.4 2.7 2.7 2.9 3.2 3.4 3.7 N/A 3.7 3.7
Factor de Disipación3)
a 60 Hz (x10-3) 4 5 6 6 6 7 7 7 7 N/A 7 7
Constante dieléctrica - ASTM D-150 Resistencia dieléctrica - ASTM D-149
EFICAZ CUANDO EL CALOR APRIETANOMEX® es una marca registrada de E. I. du Pont de Nemours and Company
Constante Dieléctrica (60 Hz)
Resistencia Dieléctrica
Temperatura, °C
Porc
enta
je d
el v
alor
de
la te
mpe
ratu
ra a
mbi
ente
1) ASTM D-149, electrodos de 50 mm, subida rápida; corresponde a IEC 243-1,subapartado 9.1 salvo por los electrodos de 50 mm.
2) ASTM D-3426 3) ASTM D-150
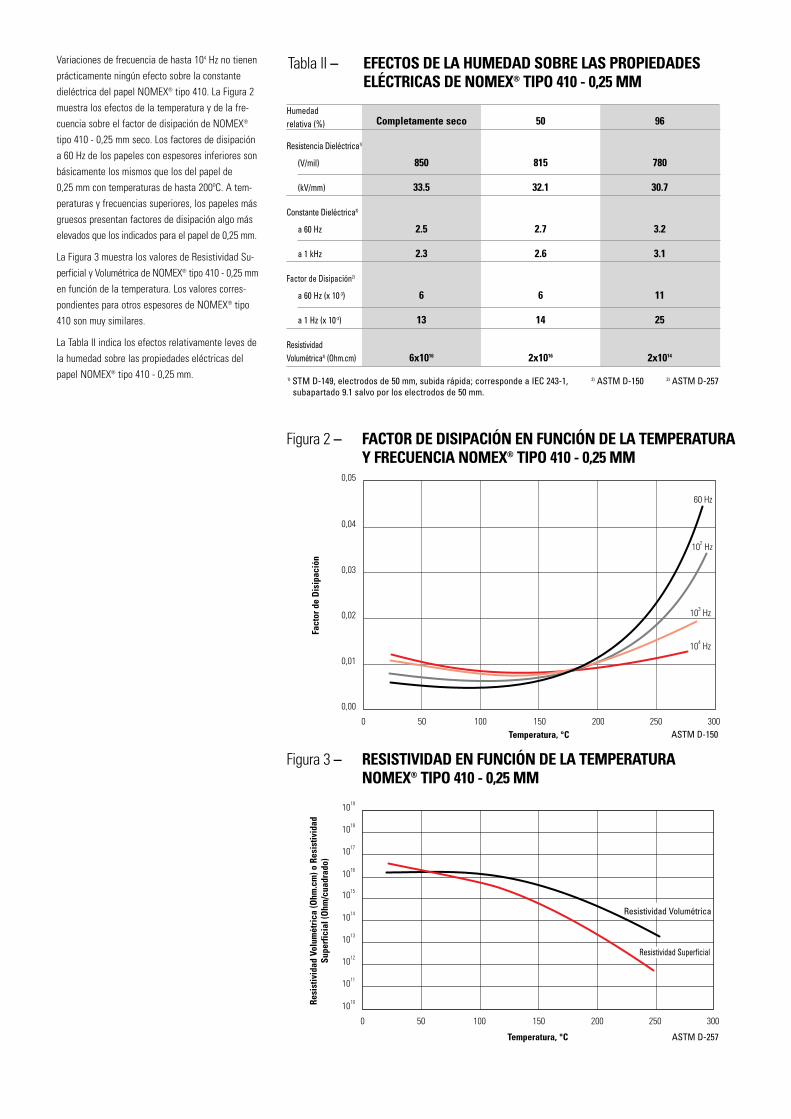
Variaciones de frecuencia de hasta 104 Hz no tienenprácticamente ningún efecto sobre la constantedieléctrica del papel NOMEX® tipo 410. La Figura 2muestra los efectos de la temperatura y de la fre-cuencia sobre el factor de disipación de NOMEX®
tipo 410 - 0,25 mm seco. Los factores de disipacióna 60 Hz de los papeles con espesores inferiores sonbásicamente los mismos que los del papel de 0,25 mm con temperaturas de hasta 200ºC. A tem-peraturas y frecuencias superiores, los papeles másgruesos presentan factores de disipación algo máselevados que los indicados para el papel de 0,25 mm.
La Figura 3 muestra los valores de Resistividad Su-perficial y Volumétrica de NOMEX® tipo 410 - 0,25 mmen función de la temperatura. Los valores corres-pondientes para otros espesores de NOMEX® tipo410 son muy similares.
La Tabla II indica los efectos relativamente leves dela humedad sobre las propiedades eléctricas delpapel NOMEX® tipo 410 - 0,25 mm.
Tabla II – EFECTOS DE LA HUMEDAD SOBRE LAS PROPIEDADESELÉCTRICAS DE NOMEX® TIPO 410 - 0,25 MM
0,00
0,01
0,02
0,03
0,04
0,05
60 Hz
102 Hz
103 Hz
104 Hz
0 50 100 150 200 250 300
Figura 2 – FACTOR DE DISIPACIÓN EN FUNCIÓN DE LA TEMPERATURAY FRECUENCIA NOMEX® TIPO 410 - 0,25 MM
1010
1012
1014
1016
1011
1013
1015
1019
1018
1017
0 50 100 150 200 250 300
Figura 3 – RESISTIVIDAD EN FUNCIÓN DE LA TEMPERATURANOMEX® TIPO 410 - 0,25 MM
Humedadrelativa (%) Completamente seco 50 96
Resistencia Dieléctrica1)
(V/mil) 850 815 780
(kV/mm) 33.5 32.1 30.7
Constante Dieléctrica2)
a 60 Hz 2.5 2.7 3.2
a 1 kHz 2.3 2.6 3.1
Factor de Disipación2)
a 60 Hz (x 10-3) 6 6 11
a 1 Hz (x 10-3) 13 14 25
ResistividadVolumétrica3) (Ohm.cm) 6x1016 2x1016 2x1014
ASTM D-257
ASTM D-150
Resistividad Volumétrica
Resistividad Superficial
Temperatura, °C
Fact
or d
e D
isip
ació
n
Temperatura, °C
Resi
stiv
idad
Vol
umét
rica
(Ohm
.cm
) o R
esis
tivid
adSu
perf
icia
l (O
hm/c
uadr
ado)
1) STM D-149, electrodos de 50 mm, subida rápida; corresponde a IEC 243-1,subapartado 9.1 salvo por los electrodos de 50 mm.
2) ASTM D-150 3) ASTM D-257
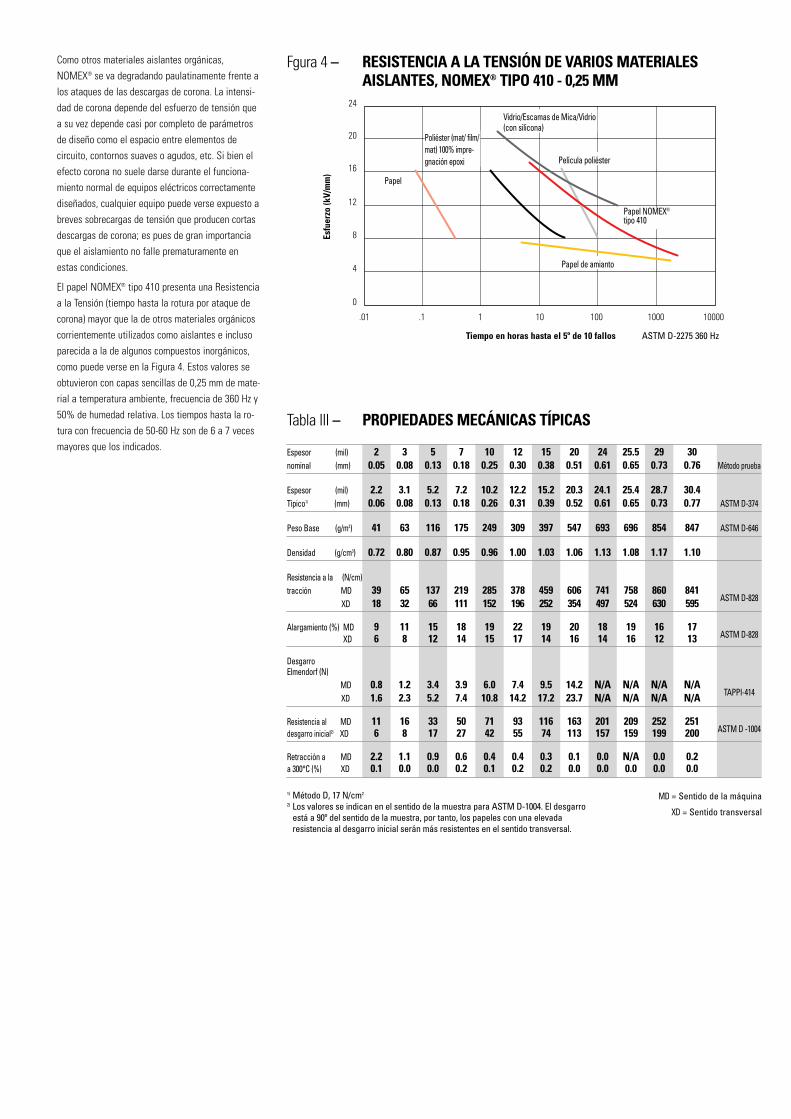
Como otros materiales aislantes orgánicas,NOMEX® se va degradando paulatinamente frente alos ataques de las descargas de corona. La intensi-dad de corona depende del esfuerzo de tensión quea su vez depende casi por completo de parámetrosde diseño como el espacio entre elementos decircuito, contornos suaves o agudos, etc. Si bien elefecto corona no suele darse durante el funciona-miento normal de equipos eléctricos correctamentediseñados, cualquier equipo puede verse expuesto abreves sobrecargas de tensión que producen cortasdescargas de corona; es pues de gran importanciaque el aislamiento no falle prematuramente enestas condiciones.
El papel NOMEX® tipo 410 presenta una Resistenciaa la Tensión (tiempo hasta la rotura por ataque decorona) mayor que la de otros materiales orgánicoscorrientemente utilizados como aislantes e inclusoparecida a la de algunos compuestos inorgánicos,como puede verse en la Figura 4. Estos valores seobtuvieron con capas sencillas de 0,25 mm de mate-rial a temperatura ambiente, frecuencia de 360 Hz y50% de humedad relativa. Los tiempos hasta la ro-tura con frecuencia de 50-60 Hz son de 6 a 7 vecesmayores que los indicados.
0
4
8
12
16
20
24
.01 .1 1 10 100 1000 10000
Fgura 4 – RESISTENCIA A LA TENSIÓN DE VARIOS MATERIALESAISLANTES, NOMEX® TIPO 410 - 0,25 MM
Tabla III – PROPIEDADES MECÁNICAS TÍPICAS
Espesor (mil) 2 3 5 7 10 12 15 20 24 25.5 29 30nominal (mm) 0.05 0.08 0.13 0.18 0.25 0.30 0.38 0.51 0.61 0.65 0.73 0.76 Método prueba
Espesor (mil) 2.2 3.1 5.2 7.2 10.2 12.2 15.2 20.3 24.1 25.4 28.7 30.4Típico1) (mm) 0.06 0.08 0.13 0.18 0.26 0.31 0.39 0.52 0.61 0.65 0.73 0.77 ASTM D-374
Peso Base (g/m2) 41 63 116 175 249 309 397 547 693 696 854 847 ASTM D-646
Densidad (g/cm3) 0.72 0.80 0.87 0.95 0.96 1.00 1.03 1.06 1.13 1.08 1.17 1.10
Resistencia a la (N/cm) tracción MD 39 65 137 219 285 378 459 606 741 758 860 841
ASTM D-828XD 18 32 66 111 152 196 252 354 497 524 630 595
Alargamiento (%) MD 9 11 15 18 19 22 19 20 18 19 16 17ASTM D-828XD 6 8 12 14 15 17 14 16 14 16 12 13
DesgarroElmendorf (N)
MD 0.8 1.2 3.4 3.9 6.0 7.4 9.5 14.2 N/A N/A N/A N/ATAPPI-414
XD 1.6 2.3 5.2 7.4 10.8 14.2 17.2 23.7 N/A N/A N/A N/A
Resistencia al MD 11 16 33 50 71 93 116 163 201 209 252 251ASTM D -1004desgarro inicial2) XD 6 8 17 27 42 55 74 113 157 159 199 200
Retracción a MD 2.2 1.1 0.9 0.6 0.4 0.4 0.3 0.1 0.0 N/A 0.0 0.2a 300°C (%) XD 0.1 0.0 0.0 0.2 0.1 0.2 0.2 0.0 0.0 0.0 0.0 0.0
MD = Sentido de la máquina
XD = Sentido transversal
1) Método D, 17 N/cm2
2) Los valores se indican en el sentido de la muestra para ASTM D-1004. El desgarroestá a 90º del sentido de la muestra, por tanto, los papeles con una elevadaresistencia al desgarro inicial serán más resistentes en el sentido transversal.
ASTM D-2275 360 Hz
Poliéster (mat/ film/mat) 100% impre-gnación epoxi
Vidrio/Escamas de Mica/Vidrio(con silicona)
Película poliéster
Papel NOMEX®
tipo 410
Papel
Papel de amianto
Tiempo en horas hasta el 5º de 10 fallosEs
fuer
zo (k
V/m
m)
0
0 50 100 150 200 300250
20
40
60
80
100
110
10
30
50
70
90
120
130
140
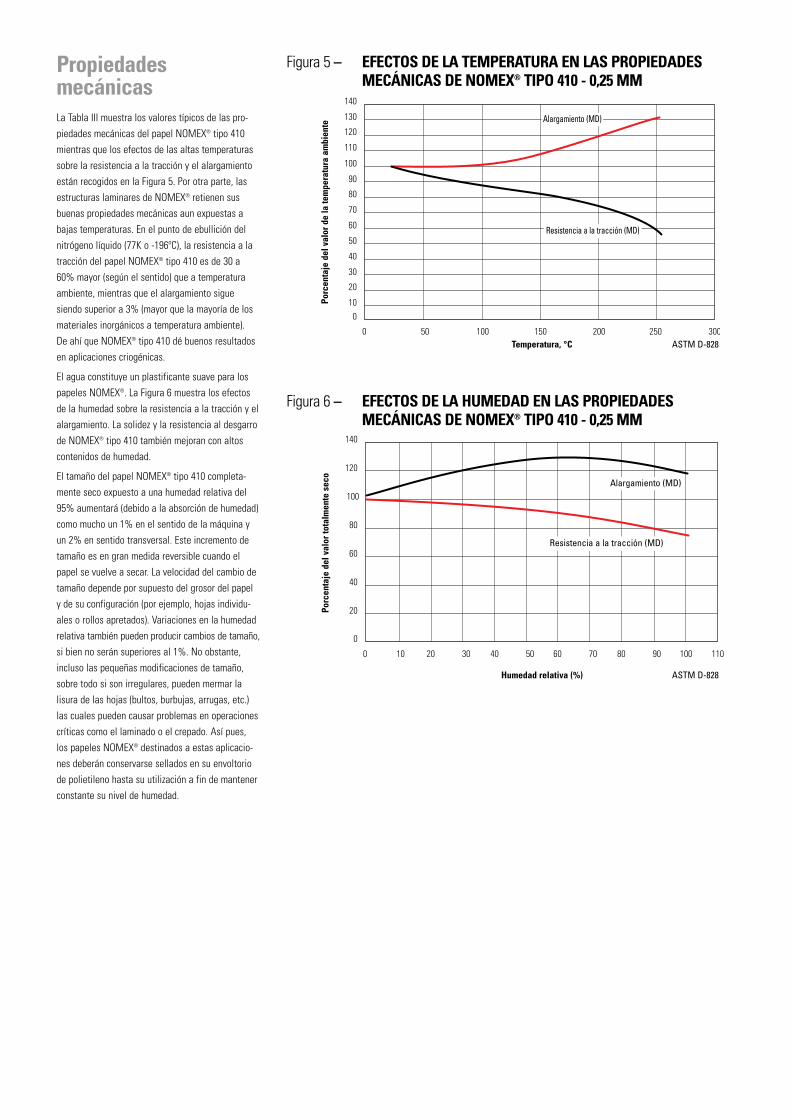
Figura 5 – EFECTOS DE LA TEMPERATURA EN LAS PROPIEDADESMECÁNICAS DE NOMEX® TIPO 410 - 0,25 MM
0
20
40
60
80
100
140
120
0 10 20 30 40 50 60 70 80 90 100 110
Figura 6 – EFECTOS DE LA HUMEDAD EN LAS PROPIEDADESMECÁNICAS DE NOMEX® TIPO 410 - 0,25 MM
PropiedadesmecánicasLa Tabla III muestra los valores típicos de las pro-piedades mecánicas del papel NOMEX® tipo 410mientras que los efectos de las altas temperaturassobre la resistencia a la tracción y el alargamientoestán recogidos en la Figura 5. Por otra parte, lasestructuras laminares de NOMEX® retienen susbuenas propiedades mecánicas aun expuestas abajas temperaturas. En el punto de ebullición delnitrógeno líquido (77K o -196ºC), la resistencia a latracción del papel NOMEX® tipo 410 es de 30 a60% mayor (según el sentido) que a temperaturaambiente, mientras que el alargamiento siguesiendo superior a 3% (mayor que la mayoría de losmateriales inorgánicos a temperatura ambiente). De ahí que NOMEX® tipo 410 dé buenos resultadosen aplicaciones criogénicas.
El agua constituye un plastificante suave para lospapeles NOMEX®. La Figura 6 muestra los efectosde la humedad sobre la resistencia a la tracción y elalargamiento. La solidez y la resistencia al desgarrode NOMEX® tipo 410 también mejoran con altoscontenidos de humedad.
El tamaño del papel NOMEX® tipo 410 completa-mente seco expuesto a una humedad relativa del95% aumentará (debido a la absorción de humedad)como mucho un 1% en el sentido de la máquina yun 2% en sentido transversal. Este incremento detamaño es en gran medida reversible cuando elpapel se vuelve a secar. La velocidad del cambio detamaño depende por supuesto del grosor del papel y de su configuración (por ejemplo, hojas individu-ales o rollos apretados). Variaciones en la humedadrelativa también pueden producir cambios de tamaño,si bien no serán superiores al 1%. No obstante,incluso las pequeñas modificaciones de tamaño,sobre todo si son irregulares, pueden mermar lalisura de las hojas (bultos, burbujas, arrugas, etc.)las cuales pueden causar problemas en operacionescríticas como el laminado o el crepado. Así pues, los papeles NOMEX® destinados a estas aplicacio-nes deberán conservarse sellados en su envoltoriode polietileno hasta su utilización a fin de mantenerconstante su nivel de humedad.
ASTM D-828
Resistencia a la tracción (MD)
Alargamiento (MD)
Alargamiento (MD)
ASTM D-828
Resistencia a la tracción (MD)
Temperatura, °C
Porc
enta
je d
el v
alor
de
la te
mpe
ratu
ra a
mbi
ente
Humedad relativa (%)
Porc
enta
je d
el v
alor
tota
lmen
te s
eco

Propiedades térmicasLas Figuras 7, 8 y 9 muestran los efectos de la expo-sición prolongada a altas temperaturas sobre im-portantes propiedades eléctricas del papel NOMEX®
tipo 410 - 0,25 mm. Estas gráficas de Arrhenius delenvejecimiento constituyen la base del reconoci-miento de los papeles NOMEX® como aislantes a220ºC por Underwriters Laboratories, la Marina delos EE.UU. y otros organismos y también las respal-dan 35 años de experiencia en aplicaciones comer-ciales. Las gráficas también permiten extrapolarpara temperaturas superiores. Así por ejemplo, lasmediciones indican que el papel NOMEX® tipo 410retendrá su resistencia dieléctrica de 12 Kv/mmdurante varias horas de exposición a 400ºC tal comopermite predecir la gráfica de Arrhenius.
102
103
104
105
106
100 140 180 220 260 340 380300
Figura 7 – VIDA ÚTIL EN FUNCIÓN DE LA TEMPERATURA NOMEX®
TIPO 410 - 0,25 MM
102
103
104
105
106
100 140 180 220 260 340 380300
Figura 8 – VIDA ÚTIL EN FUNCIÓN DE LA TEMPERATURA NOMEX®
TIPO 410 - 0,25 MM
ASTM D-1830 Electrodos curvados
Prueba según UL-746
Tiempo =8262
– 11,44°C + 273
Tiempo =7461
– 10,40°C + 273
Temperatura, °C
Temperatura, °C
Tiem
po d
e en
veje
cim
ient
o en
hor
as h
asta
12
KV/
mm
de
resi
sten
cia
diel
éctr
ica
Tiem
po d
e en
veje
cim
ient
o en
hor
as h
asta
el 5
0% d
ere
siste
ncia
a la
trac
ción
inic
ial e
n el
sent
ido
de la
máq
uina
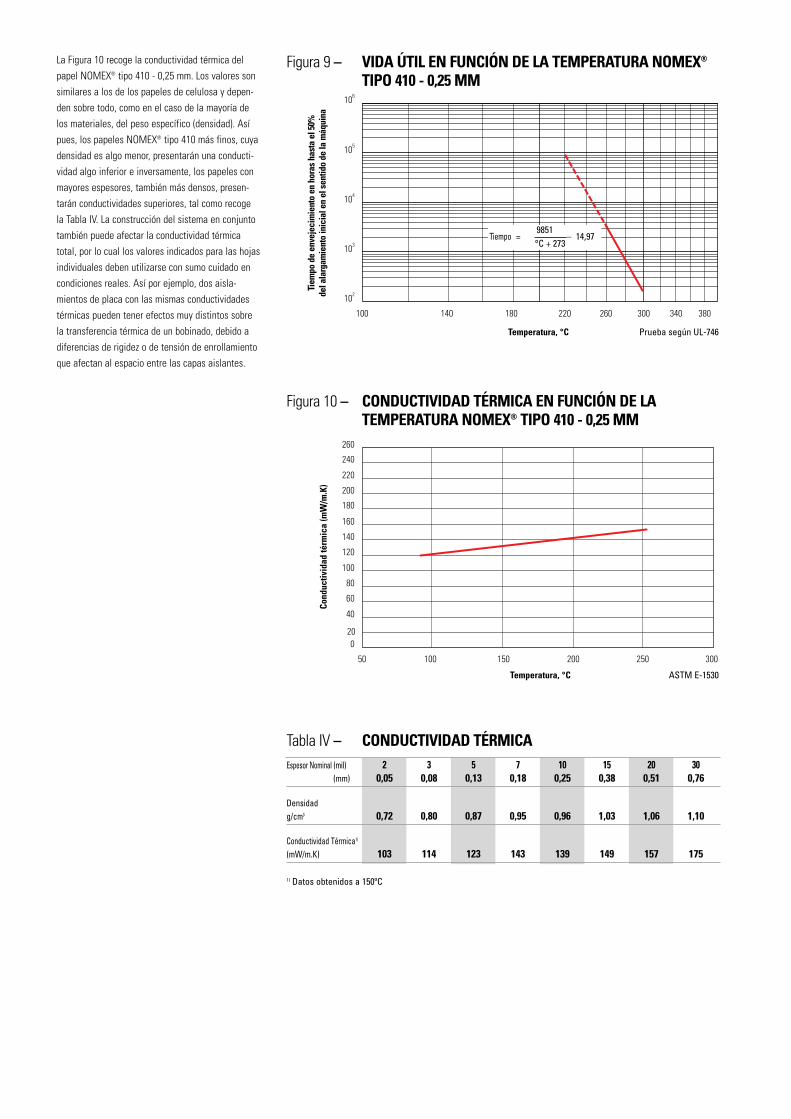
La Figura 10 recoge la conductividad térmica delpapel NOMEX® tipo 410 - 0,25 mm. Los valores sonsimilares a los de los papeles de celulosa y depen-den sobre todo, como en el caso de la mayoría delos materiales, del peso específico (densidad). Asípues, los papeles NOMEX® tipo 410 más finos, cuyadensidad es algo menor, presentarán una conducti-vidad algo inferior e inversamente, los papeles conmayores espesores, también más densos, presen-tarán conductividades superiores, tal como recogela Tabla IV. La construcción del sistema en conjuntotambién puede afectar la conductividad térmicatotal, por lo cual los valores indicados para las hojasindividuales deben utilizarse con sumo cuidado encondiciones reales. Así por ejemplo, dos aisla-mientos de placa con las mismas conductividadestérmicas pueden tener efectos muy distintos sobrela transferencia térmica de un bobinado, debido adiferencias de rigidez o de tensión de enrollamientoque afectan al espacio entre las capas aislantes.
102
103
104
105
106
100 140 180 220 260 340 380300
Figura 9 – VIDA ÚTIL EN FUNCIÓN DE LA TEMPERATURA NOMEX®
TIPO 410 - 0,25 MM
50 100 150 200 250 300
020
60
100
140
180
260
220
40
80
120
160
200
240
Figura 10 – CONDUCTIVIDAD TÉRMICA EN FUNCIÓN DE LATEMPERATURA NOMEX® TIPO 410 - 0,25 MM
Tabla IV – CONDUCTIVIDAD TÉRMICAEspesor Nominal (mil) 2 3 5 7 10 15 20 30
(mm) 0,05 0,08 0,13 0,18 0,25 0,38 0,51 0,76
Densidadg/cm3 0,72 0,80 0,87 0,95 0,96 1,03 1,06 1,10
Conductividad Térmica1)
(mW/m.K) 103 114 123 143 139 149 157 175
1) Datos obtenidos a 150ºC
ASTM E-1530
Prueba según UL-746
Tiempo =9851
– 14,97°C + 273
Temperatura, °C
Cond
uctiv
idad
térm
ica
(mW
/m.K
)Temperatura, °C
Tiem
po d
e en
veje
cim
ient
o en
hor
as h
asta
el 5
0%
del a
larg
amie
nto
inic
ial e
n el
sen
tido
de la
máq
uina

15
20
25
30
35
0 100 200 300 400
Figura 11 – ÍNDICE DE OXÍGENO CRÍTICO (IOC) NOMEX®
TIPO 410 - 0,13 MM
Tabla V – RESISTENCIA A RADIACIÓN BAJO 2 MEV DE ELECTRONES(RAYOS BETA) NOMEX® TIPO 410 - 0,25 MM
Dosis (MGy) 0 1 2 4 8 16 32 64
Resist. a la Tracción1) MD 100 96 100 100 94 87 81 65(% del original) XD 100 100 99 99 97 86 81 69
Alargamiento1) MD 100 89 92 96 76 60 36 18XD 100 92 91 88 82 47 27 16
Resist. Dieléctrica2)
(kV/mm) 34 34 33 33 33 34 35 31
Constante 60Hz 3.1 3.0 3.0 3.0 3.0 3.1 2.3 2.5Dieléctrica3)
1kHz 3.0 3.0 2.9 3.0 2.9 3.1 2.3 2.5
10kHz 2.9 2.9 2.9 2.9 2.8 3.0 2.2 2.4
Factor 60Hz 8 14 10 12 9 14 7 10Dieléctrico3)
1kHz 13 16 15 16 13 16 11 13(x 10-3)
10kHz 18 21 20 20 19 20 15 17
1) ASTM D-828 2) ASTM D-149 con electrodos de 6,4 mm de diámetro. 3) ASTM D-150
Estabilidad químicaLa compatibilidad de los papeles y cartones pren-sados NOMEX® con prácticamente todos los bar-nices y adhesivos eléctricos (poliamidas, siliconas,epóxidos, poliésteres, acrílicos, fenólicos, cauchossintéticos, etc.) y con los demás componentes deequipos eléctricos queda demostrada por los nume-rosos sistemas de aislamiento incorporandoNOMEX® reconocidos por UL y por una larga expe-riencia comercial. Los papeles NOMEX® son asímismo plenamente compatibles (y utilizados comer-cialmente) con los fluidos de transformadores(aceites mineral y de silicona) y con lubricantes yrefrigerantes utilizados en los dispositivos hermé-ticos. Los disolventes industriales corrientes (alco-holes, cetonas, acetona, tolueno, xileno) causan unleve ablandamiento e hinchamiento del papelNOMEX® tipo 410 similar al producido por el agua.Son efectos reversibles que desaparecen al elimi-narse el disolvente.
El Índice de Oxígeno Crítico (IOC) del papel NOMEX®
tipo 410 a temperatura ambiente es de 27 a 32%(según el espesor y densidad); mientras que a 220ºCsus valores van de 22 a 25%. Los materiales con unIOC superior a 20,8 (en atmósfera ambiente) nosostienen la combustión. El papel NOMEX® tipo 410debe ser expuesto a temperaturas de 240 a 350ºC(aquí también según el grosor) para que su IOCdescienda por debajo del umbral de inflamabilidad.La Figura 11 muestra los valores del IOC deNOMEX® tipo 410 - 0,13 mm.
Los efectos de 6.400 megarads (64 Mgy) de radia-ción beta de 2 MeV sobre las propiedades mecáni-cas y eléctricas del papel NOMEX® tipo 410 quedanreflejados en la Tabla V. (En comparación, un lami-nado de película y entramado de poliéster delmismo grosor, impregnado al 100% de epóxido, sedesmorronó a partir de 800 megarads u 8 Mgy. Seobtuvieron resultados muy parecidos con exposicio-nes a radiación gamma. Debido a su notableresistencia a la radiación, los papeles de NOMEX®
se suelen utilizar en los críticos equipos de controlde las centrales nucleares.
ASTM D-2863Temperatura, °CÍn
dice
de
oxíg
eno
críti
co %
EFICAZ CUANDO EL CALOR APRIETANOMEX® es una marca registrada de E. I. du Pont de Nemours and Company
L-12
285-
6
02
/01
Información sobre la seguridad de los productos a solicitud.La información aquí reseñada corresponde a los datos más exactos de queactualmente disponemos. Esta información se ofrece a título indicativo yexclusivamente para proporcionar sugerencias para su propia experimentación.No se pretende sustituir las pruebas que Udes. deban efectuar para determinarla elección de nuestros productos para sus necesidades particulares. Estosvalores son susceptibles de modificación a medida que se obtengan datos yexperiencia nueva. Ya que no es posible realizar un control sobre las con-diciones particulares de utilización de nuestros productos, DuPont no asumeninguna obligación sobre resultados ni responsabilidad alguna reference a lautilización de esta información. Por otro lado y en ningún caso, la presentepublicación debe interpretarse como una licencia de uso ni como medio paraviolar los derechos de patentes existentes.
www.dupont.com/nomex
DuPont NOMEX®
P.O. Box 50
CH-1218 le Grand Saconnex
Ginebra, Suiza
Tel: ++41 22 717 5111
Fax: ++41 22 717 6218
e-mail:
DuPont NOMEX®
ARCO Tower
8-1, Shimomeguro I-chome
Meguro-ku, Tokyo 153
Japón
Tel: ++81 3 5434 6609
Fax: ++81 3 5434 6605
DuPont NOMEX®
1122 New World Office Building
East Wing
24 Salisbury Road
Tsimshatsui
Kowloon
Hong Kong
Tel: ++852 2734 5363
Fax: ++852 2734 5486
e-mail:
DuPont NOMEX®
Customer Inquiry Center
5401 Jefferson Davis Highway
Richmond, VA 23234
EE UU
Tel: ++1 800 453 8527
++1 804 383 4400
Fax: ++1 804 787 7086
++1 804 383 3963
e-mail:
DuPont NOMEX®
P.0. Box 2200
Streetsville Postal Station
7070 Mississauga Road
Mississauga, Ontario, L5M 2H3
Canadá
Tel: ++1 905 821 5193
Fax: ++1 905 821 5177
DuPont do Brasil SA
Departamento AFS/NOMEX® Paper
Al. Itapecuru, 506
Alphaville
Barueri, SP
CEP 06454-080
Brasil
Tel: ++55 11 4166 8295
Fax: ++55 11 4166 8904
e-mail:
S.E.G. ROYAL DIAMOND,S.A.Aislantes eléctricos
INFORMACION TECNICA Edición:17.03.05
La información que le ofrecemos es de carácter orientativo y como resultado de nuestros ensayos, pero sin asumir ninguna responsabilidadderivada de su aplicación.
S.E.G. ROYAL DIAMOND,S.A. Polígono Industrial S/N 08319 Dosrius (Barcelona) EspañaTel- 93 791 80 06 Fax: 93 791 91 25 e-mail: [email protected] www.royal-diamond.es
ROYALAC 158 CLASE TERMICA F (155ºC)BARNIZ DIELECTRICO SECADO AL HORNO
El barniz de impregnación ROYALAC 158, está elaborado a base de resinas sintéticas de tipotermoendureciente.Su secado se efectúa por polimerización obteniendo bobinados muy compactos, con granadherencia y dureza.Presenta buena compatibilidad sobre hilos esmaltados y demás aislantes. CAMPO DE APLICACIONImpregnación de transformadores y estátores.
MODO DE EMPLEOEl barniz Royalac 158 puede aplicarse por inmersión, o bien al autoclave con vacío-presión y también eninstalaciones en continuo de impregnación-secado. Recomendamos hacer las inmersiones de los bobinados a temperatura ambiente o máximo a 40ºC, a fin deevitar fenómenos de aglutinación del barniz y defectos de impregnación.El barniz Royalac 158 presenta la ventaja de poder secarse como un barniz de la Clase B (130ºC),obteniéndose características térmicas, una vez polimerizado, de un barniz de la Clase F (155ºC). A tituloindicativo y generalizado, señalaremos un tiempo de 2 a 4 horas a 130-140ºC.
CARACTERISTICAS FISICASColor. .....................................................................Dorado.Densidad a 20ºC (grs/cm3).......................................0.960Viscosidad Copa Ford Nº 4 a 20ºC (seg) ...................15+-5Materia fija (%).......................................................30+-2Clasificación Térmica................................................F (155ºC) Tiempo de secado sobre placa a 135ºC (min) ............5Película resultante ...................................................Brillante, adherente, flexible y dura.Estabilidad almacenaje a 20ºC ..................................12 meses. CARACTERISTICAS DIELECTRICASPerforación dieléctrica sobre placa de cobre por grueso de película 0.01 mm:ESTADO NATURAL...................................................1300 VDespués de 24 horas en CLH al 50%.........................1100 VDespués de 8 días al aire (90 % humedad)................1200 VDespués de 8 días en agua destilada .........................1100 VDespués de 8 días en aceite de transformadores ........1350 V
DILUYENTEEn caso que se desee reducir la viscosidad, debe emplearse nuestro DILUYENTE F-5.
FORMA DE SUMINISTROEn envases de hojalata litografiados y precintados de 5 y 25 litros.En bidones de plancha de hierro de 50, 100 y 200 litros.
!"#$%%&%''()*"#$%%&% ' +%,%)%"- %''../0/%/%1
!!"#$!%& '()*"+,!-./!$"/ 0/$!'1/12&1/3&/ 0/$1"1&1 4*#***# 4**0 "/1"!&&5""" $ ()*6/7 %&/ 4**6/$!&11 8**6"!5"12/&5" (9:;.μμμμ#/"" 111!$"/ *<4$=,$11-1"& 9:>,!5",1&&/"$ ::,!5" "1&&/"$ ().μμμμ#!!"&$/!1!/$3"! 8 1$,/,"1/ ;-//1!!"&$ 11 ;-//1!!"&$&"!2/1/ ;-/1!!"&$/!2"! ''!!"&$!"/ $/$1,$11 ''1"&/&$/ '' ,$"1&"/ ''0 0? //!@"!2/1/!@&"&!@
"'&/$!0
' A*#8(9'44B' A*#8(9'44
' CA#C(A':' D'8*B' '8(#A94
E B'(*8:8AE F
E'(# *@*C<A@:*E'4# *@*9<A@:*
Qualities that Bond
NOTA: Debido a la continua introducción de mejoras, AEV Iberica, S.L. se reserva el derecho de suministrar productos que puedan diferir ligeramente de aquellos mostrados o descritos en esta publicación.
Email: [email protected] www.aeviberica.com
AEV Iberica, S.L.
Puig i Pidemunt, 16, 08302 Mataró, Barcelona
Tel: ++ 34 93 755 60 92
Fax: ++ 34 93 755 60 93
PLACAS DE TEJIDO DE VIDRIO EPOXI EPGC 203 (G11) COMPOSICION Placas fabricadas a partir de varias capas de tejido de vidrio impregnado con resina epoxi, prensadas bajo presión y temperatura hasta conseguir un estratificado rígido conforme a las siguientes normas internacionales:
UNE-EN 60893-3-2 (2004) : EP GC 203 NEMA LI-1 : G11 DIN 7735 : Hgw 2372.4
PROPIEDADES: Por su composición de vidrio y resina epoxi, el estratificado EPGC 203 (G11) presenta una excelente resistencia térmica y química, así como también muy buenas propiedades mecánicas operando a temperaturas hasta la clase térmica H (180ºC). APLICACIONES: Las placas de vidrio epoxi de calidad EPGC 203 (G11) son adecuadas para una amplia gama de aplicaciones tanto eléctricas como mecánicas. Gracias a sus excelentes propiedades mecánicas y eléctricas a temperaturas elevadas, es un producto idóneo para la fabricación de cuñas de ranura de máquinas rotativas, aparellaje de media y alta tensión, transformadores, etc. En general en todas aquellas aplicaciones donde sea necesario un buen comportamiento frente a los esfuerzos mecánicos, especialmente a flexión, y eléctricos extremos a temperaturas elevadas. DATOS TECNICOS:
PROPIEDADES NORMA VALOR UNIDAD
Densidad ISO 1183 / A 1.8 - 2.0 g/cm³
Resistencia a la flexión a 23 ºC
a 155 ºC ISO 178
350
175
MPa
MPa
Resistencia al impacto(Charpy) paralelo a las capas ISO 179 / 3 C > 33 kJ/m²
Resistencia a la tracción ISO 527 > 250 MPa
Rigidez dieléctrica a 90°C en aceite perp. a las capas (esp. 3mm) IEC 60243 > 14.2 kV/mm
Voltaje de ruptura a 90°C en aceite paralelo a las capas IEC 60243 > 40 kV
Resistencia de aislamiento después de inmersión en agua IEC 60167 > 5x108 Ω
Factor de pérdidas a 50 Hz y 1 MHz IEC 60250 0.04 -
Constante dieléctrica a 50 Hz y 1 MHz IEC 60250 5.5 -
Estabilidad térmica (Martens) 200 ºC
Absorción de agua (espesor de 1,6 mm) ISO 62 19 mg
Conductividad térmica 0.3 W/m·K
Resistencia térmica IEC 60216 F (155ºC) DISPONIBILIDAD: Espesores: 0,2 hasta 100 mm. Tol. espesor: s/ Norma UNE-EN 60893-3-2 Color: Verde Formatos placa: 2040±25 x 1020±15 mm
2470±25 x 1220±15 mm
Placas cortadas y piezas mecanizadas bajo plano disponibles bajo pedido, no duden en consultar. 12/12 Rev. 2


















