Propuesta Algorítmica para el Problema de Árbol de Expansión Bajo el Criterio Minmax Regret
10
PROPUESTA ALGORÍTMICA PARA EL PROBLEMA ÁRBOL DE EXPANSIÓN BAJO EL CRITERIO MINMAX REGRET Francisco Pérez Galarce, Alfredo Candia-Véjar, Eduardo Álvarez-Miranda 1 DMGI, Facultad de Ingeniería, Universidad de Talca RESUMEN El presente estudio aborda el problema de Árbol de Expansión con incertidumbre intervalar en los costos, utilizando el criterio Min-Max Regret (MMR); se sabe que la complejidad computacional de este problema es alta. Se proponen e implementan algoritmos, tanto exactos como heurísticos. Descomposición de Benders (BD) y Branch and Cut (B&C), son implementados desde el punto de vista exacto, ambos incluyen variantes. B&C es el que logra obtener mejores resultados, incluso obteniendo soluciones óptimas para instancias de gran tamaño. En relación a los algoritmos aproximados, se desarrolla una heurística constructiva que usa información intervalar, a diferencia de las aproximaciones de la literatura. Adicionalmente, se proponen metaheurísticas basadas en Búsqueda Local (Mejora iterativa, Simulated Annealing y GRASP), donde se obtienen gaps similares a algoritmos propuestos recientemente. Finalmente, se realiza una comparación desde un punto de vista experimental, del desempeño de los algoritmos. I. INTRODUCCIÓN Dentro de la optimización combinatorial en redes, uno de los problemas más estudiados es el árbol de expansión mínima (Minimum Spanning Tree, MST) . Este fue propuesto en diferentes contextos antes del siglo XX, sin embargo, su primera formulación matemática se presentó en Boruvka (1926), fue para resolver esta problemática, netamente práctica (electrificación del sur de Moravia), donde se proporcionó el primer algoritmo conocido para resolverlo. En la década de los 50’, con la aparición de los primeros computadores, surgieron estudios importantes, donde destacan los realizados por (Prim, 1957) y (Kruskal, 1956). Para una revisión completa de los aportes realizados respecto al MST ver (Graham & Hell, 1985), (Magnanti & Wolsey, 1995) y (Nesetril et. al, 2001). Los problemas de árbol han llamado el interés de IO por diversas razones, en primer lugar por su gran aplicabilidad (telefonía, electricidad, hidráulica, transporte, etc.). Otro factor que ha gatillado el estudio de ellos es la facilidad (tiempo polinomial) con la que se puede solucionar el problema raíz (MST). Finalmente, los modelos de árbol representan un problema tipo para muchos problemas de optimización combinatorial, por lo que las técnicas estudiadas en éste pueden ser replicadas para esta clase de problemas. Una discusión presente desde el origen de la IO es la incerteza en los parámetros. Los modelos en forma clásica trabajan bajo el supuesto de que los datos son conocidos. En la práctica trabajar bajo este supuesto es poco realista, la forma tradicional para obviar dicha afirmación es la programación estocástica, sin embargo, esta metodología implica realizar otra aseveración importante, pues requiere definir una distribución de probabilidad, lo cual muchas es inviable. Dada esta dificultad, durante las últimas décadas ha tomado importancia una nueva línea de investigación, la cual trabaja la incertidumbre mediante datos intervalares, donde no se tiene conocimiento con respecto a su distribución de probabilidad. Dicha propuesta de modelamiento de la incertidumbre ha recibido el nombre de optimización robusta (OR). Diversos modelos se han propuesto bajo el contexto de OR, particularmente, en este trabajo se profundizará en el modelo MMR que por lo demás, ha capturado gran atención; prueba de esto son los diferentes modelos que han sido estudiados bajo este concepto; Camino más corto (Karasan et al., 2001) , MST (Yaman et al.,, 2001) problemas de localización (Averbakh & Berman, 2005), vendedor viajero (Montemanni et al., 2007). Una característica importante de los Modelos de tipo MMR es que usualmente modelos que en la versión clásica son fáciles de resolver (tiempo polinomial) en la contraparte robusta se convierten en problemas NP- Hard. En particular al modelo MMR-ST se le demuestra su complejidad en el trabajo presentado por Aron & Van Hentenryck (2004). En (Yaman et al., 2001) se presenta la primera formulación de programación matemática, en este trabajo, además, se presenta una técnica de preprocesamiento. Un algoritmo B&B es presentado en (Montemanni & Gambardella, 2005). Dos algoritmos B&B nuevos son presentados en (Aron & 1 Departamento de Modelamiento y Gestión Industrial, Facultad de Ingeniería
-
Upload
francisco-j-perez-galarce -
Category
Documents
-
view
98 -
download
2
Transcript of Propuesta Algorítmica para el Problema de Árbol de Expansión Bajo el Criterio Minmax Regret

PROPUESTA ALGORÍTMICA PARA EL PROBLEMA ÁRBOL DE
EXPANSIÓN BAJO EL CRITERIO MINMAX REGRET
Francisco Pérez Galarce, Alfredo Candia-Véjar, Eduardo Álvarez-Miranda 1DMGI, Facultad de Ingeniería, Universidad de Talca
RESUMEN El presente estudio aborda el problema de Árbol de Expansión con incertidumbre intervalar en los
costos, utilizando el criterio Min-Max Regret (MMR); se sabe que la complejidad computacional de
este problema es alta. Se proponen e implementan algoritmos, tanto exactos como heurísticos.
Descomposición de Benders (BD) y Branch and Cut (B&C), son implementados desde el punto de
vista exacto, ambos incluyen variantes. B&C es el que logra obtener mejores resultados, incluso
obteniendo soluciones óptimas para instancias de gran tamaño. En relación a los algoritmos
aproximados, se desarrolla una heurística constructiva que usa información intervalar, a diferencia
de las aproximaciones de la literatura. Adicionalmente, se proponen metaheurísticas basadas en
Búsqueda Local (Mejora iterativa, Simulated Annealing y GRASP), donde se obtienen gaps
similares a algoritmos propuestos recientemente. Finalmente, se realiza una comparación desde un
punto de vista experimental, del desempeño de los algoritmos.
I. INTRODUCCIÓN Dentro de la optimización combinatorial en redes, uno de los problemas más estudiados es el árbol de
expansión mínima (Minimum Spanning Tree, MST) . Este fue propuesto en diferentes contextos antes del
siglo XX, sin embargo, su primera formulación matemática se presentó en Boruvka (1926), fue para resolver
esta problemática, netamente práctica (electrificación del sur de Moravia), donde se proporcionó el primer
algoritmo conocido para resolverlo. En la década de los 50’, con la aparición de los primeros computadores,
surgieron estudios importantes, donde destacan los realizados por (Prim, 1957) y (Kruskal, 1956). Para una
revisión completa de los aportes realizados respecto al MST ver (Graham & Hell, 1985), (Magnanti &
Wolsey, 1995) y (Nesetril et. al, 2001).
Los problemas de árbol han llamado el interés de IO por diversas razones, en primer lugar por su gran
aplicabilidad (telefonía, electricidad, hidráulica, transporte, etc.). Otro factor que ha gatillado el estudio de
ellos es la facilidad (tiempo polinomial) con la que se puede solucionar el problema raíz (MST). Finalmente,
los modelos de árbol representan un problema tipo para muchos problemas de optimización combinatorial,
por lo que las técnicas estudiadas en éste pueden ser replicadas para esta clase de problemas.
Una discusión presente desde el origen de la IO es la incerteza en los parámetros. Los modelos en forma
clásica trabajan bajo el supuesto de que los datos son conocidos. En la práctica trabajar bajo este supuesto es
poco realista, la forma tradicional para obviar dicha afirmación es la programación estocástica, sin embargo,
esta metodología implica realizar otra aseveración importante, pues requiere definir una distribución de
probabilidad, lo cual muchas es inviable. Dada esta dificultad, durante las últimas décadas ha tomado
importancia una nueva línea de investigación, la cual trabaja la incertidumbre mediante datos intervalares,
donde no se tiene conocimiento con respecto a su distribución de probabilidad. Dicha propuesta de
modelamiento de la incertidumbre ha recibido el nombre de optimización robusta (OR).
Diversos modelos se han propuesto bajo el contexto de OR, particularmente, en este trabajo se profundizará
en el modelo MMR que por lo demás, ha capturado gran atención; prueba de esto son los diferentes modelos
que han sido estudiados bajo este concepto; Camino más corto (Karasan et al., 2001) , MST (Yaman et al.,,
2001) problemas de localización (Averbakh & Berman, 2005), vendedor viajero (Montemanni et al., 2007).
Una característica importante de los Modelos de tipo MMR es que usualmente modelos que en la versión
clásica son fáciles de resolver (tiempo polinomial) en la contraparte robusta se convierten en problemas NP-
Hard. En particular al modelo MMR-ST se le demuestra su complejidad en el trabajo presentado por Aron &
Van Hentenryck (2004). En (Yaman et al., 2001) se presenta la primera formulación de programación
matemática, en este trabajo, además, se presenta una técnica de preprocesamiento. Un algoritmo B&B es
presentado en (Montemanni & Gambardella, 2005). Dos algoritmos B&B nuevos son presentados en (Aron &
1 Departamento de Modelamiento y Gestión Industrial, Facultad de Ingeniería

Van Hentenryck, 2004). Finalmente, en (Montemanni, 2006) se propone un algoritmo de Descomposición de
Benders (BD) que es el que ha presentado mejor desempeño a la fecha.
En referencia a los algoritmos Heurísticos, en (Kasperski & Zielinski, 2006) se propone una
heurística de un escenario con garantía de rendimiento de radio 2 (Hm). Posteriormente, en (Nikulin, 2008) se
aplica un algoritmo Simualated Annealing (SA) a instancias de tamaño 10, 20 y 30, obteniendo resultados
razonables. La última aproximación heurística fue realizada por (Kasperski et al., 2012) donde se aplica
Tabu search (TS) a un gran conjunto de instancias, demostrando que su algoritmo es mejor que SA.
Referencias bibliográficas para el problema son (Kasperski A. et al., 2008) y en (Candia-Véjar et al., 2011).
El presente trabajo presenta una propuesta algorítmica, tanto exacta como heurística, para el problema antes
descrito, en particular se proponen algoritmos competitivos con los desarrollados en la literatura.
Con respecto a la estructura del estudio, en el capítulo II se entregan los fundamentos del modelo
MMR-ST. En la sección III, se formaliza el MMR-ST, entregando su formulación matemática. En la sección
IV, se da una descripción de los algoritmos tanto exactos como heurísticos propuestos para la resolución del
problema en estudio. Los resultados de la experimentación son expuestos en la sección V. Finalmente, en la
sección VI se despliegan las conclusiones y los posibles trabajos futuros relacionados.
II. DESCRIPCIÓN DEL PROBLEMA MMR-ST El modelo MMR, busca el escenario donde se obtiene la mejor peor desviación
robusta, es decir, donde el máximo regret es mínimo. El término regret; en el contexto de
optimización es encontrar la solución que minimice la brecha de la solución bajo cualquier
escenario. Este problema puede ser modelado de la siguiente forma:
Donde, es el conjunto de soluciones factibles, es el conjunto de escenarios
posibles, es la función objetivo y la solución optima bajo un escenario particular .
Particularmente, el MMR-ST se define sobre un grafo , donde es el
conjunto de vértices y es el conjunto de aristas. Un intervalo
con se
asocia a cada arista . Los intervalos representan rangos de pesos posibles. A
continuación se entrega un conjunto de definiciones y teoremas que permiten comprender
el modelo estudiado.
Definición 1: Un escenario es obtenido a través de la asignación de un costo
.
Definición 2: La desviación robusta para un ST en un escenario , es la diferencia
entre el costo de y el costo de la solución óptima para el escenario .
Definición 3: un ST se dice solución robusta relativa, si éste tiene las más pequeña
(entre todas las soluciones) máxima (entre todos los escenarios) desviación robusta.
Teorema 1: (Yaman et al., 2001). Dado un ST un escenario , la desviación
robusta máxima se produce cuando
y
, donde representa el escenario inducido por la solución .
El Teorema 1 es la base para formulaciones matemáticas para el problema.
III. FORMULACIÓN MATEMÁTICA DEL PROBLEMA Como se mencionó anteriormente, la primera formulación matemática del modelo
MMR-ST fue presentada por (Yaman et al., 2001), el modelo se basa en dos formulaciones
matemáticas, la primera propuesta por (Magnanti & Wolsey, 1995) es la formulación single
commodity model (F1), el segundo modelo utilizado es el problema dirigido de flujo multi-
producto (F2) (Yaman et al., 2001) utiliza ambas formulaciones para representar el MMR-
ST, para representar las aristas de un ST utiliza F1 y para modelar el arrepentimiento del ST
utiliza el dual de F2. Luego la formulación resultante se presenta a continuación.

Irrestricta
En dicho trabajo también presentan técnicas de pre-procesamiento, ella consistió en
identificar aristas fuertes y débiles (strong y weak), con esto se logró eliminar un porcentaje
de éstas, no obstante, los tiempos de ejecución permanecen altos para instancias de pequeño
tamaño como los son las de experimentación. Una arista es llamada strong si
pertenece a un MST en algún escenario , donde es el conjunto de escenarios. Una
arista es llamada weak si pertenece a un MST para todos los escenarios .
IV. ALGORITMOS PROPUESTOS En relación a algoritmos exactos sólo se muestran propuestas de algoritmos B&B y
BD. Con respecto a los algoritmos aproximados lo más destacado es TS, SA y las
heurísticas de un escenario (Hu y Hm). A continuación se presentan los aportes de este
trabajo divididos en dos grupos, algoritmos exactos y algoritmos aproximados.
A. Algoritmo exactos
BD es el algoritmo exacto que ha entregado los mejores resultados, en tanto, es
natural proponer alguna variante que pudiese mejorar su desempeño. El aporte específico
que se realizará es implementar variantes con la formulación cut set inequality mostrada en
(Montemanni, 2006). Las dos extensiones del algoritmo de BD están inspiradas en el
trabajo realizado por (Pereira & Averbakh, 2011) al problema Set Covering robusto. La
primera variante consiste en el ingreso de más de un corte por iteración, a diferencia del
problema de Benders básico. Para esto, se utilizan n búsquedas locales, donde se realiza un
k-opt para encontrar soluciones similares y posteriormente se genera el corte por cada
solución encontrada. La segunda extensión de Benders está relacionada con el uso de las
soluciones incumbentes de CPLEX en la resolución del maestro, es decir, en cada iteración
se agrega el corte del problema básico y los cortes generados por cada solución incumbente
encontrada en el maestro. Cabe destacar que el maestro de cada variante es resuelto con un
algoritmo Branch and Cut (B&C), implementando heurísticas primales, las cuales se
alimentan de la información de cada nodo del proceso de B&B. Además, se utilizan los
cortes que posee CPLEX por defecto, finalmente las cut-set inequalities son manejadas a
través de un algoritmo de flujo máximo de acuerdo a lo mostrado en (Álvarez-Miranda et
al., 2012). Cabe destacar que el BD que presenta mejor desempeño es el que incorpora los
cortes relacionados con las soluciones incumbentes (EBD), por lo cual en la fase de

experimentación sólo se presentarán resultados de éste. A continuación se presenta el
pseucódigo de la versión básica de Benders.
Por otra parte, se propone implementar un algoritmo B&C, basados en Benders cuts.
Se consideró una doble separación de las restricciones, específicamente, se dividen las
restricciones topológicas del problema árbol y las restricciones asociadas a la robustez
(Benders cut). Se utiliza como base referencial lo propuesto (Pereira & Averbakh, 2011).
En relación a la separación de las restricciones de robustez, se utilizará la forma
natural de representación dada por . Para este grupo de restricciones se utiliza un
conjunto de inicialización que corresponden a las soluciones inducidas por
los escenarios del límite inferior ( ), punto medio ( ) y límite superior ( ). Dentro del
proceso de ramificación, en cada nodo, se buscan cortes violados utilizando el valor del
conjunto de variable para generar , que es calculado como , el valor de
es utilizado como peso de las aristas para aplicar un algoritmo para solución de
, para cada solución encontrada se genera el peor escenario (Teorema 1) y para este
escenario se encuentra la solución óptima . Las soluciones entregadas por
corresponden a la solución actual y soluciones en las cuales se distorsiona el valor de
a través de la multiplicación por un número aleatorio entre
.
Adicionalmente se generan soluciones aleatorias con la generación de escenarios donde
cada arista toma un valor entre
.
Para manejar la topología del problema se manejan dos conjuntos de restricciones
iniciales, las in degree constraint y las restricciones de basic subtour
La topología dentro del proceso de ramificación es manejado a través cut-set
inequalities que son separadas a través de un algoritmo de flujo máximo como se describe
en (Álvarez-Miranda et. al, 2012).
B. Algoritmos aproximados
Se desarrolla una heurística constructiva y se proponen metaheurísticas basadas en
Búsqueda Local .
Con respecto a la heurística constructiva, la idea inicial consiste en generar un criterio
de optimización utilizando los datos intervalares, luego se propone pasar de un grafo
con costos
a un grafo con costos donde
representa el regret local (ver definición abajo) de la arista .
1. Inicialización
1.1 FOMaestro MIN_INT, FOSubP MAX_INT
1.2 Inicializar Maestro con restricciones no complicantes
1.3 ,
2. while (FOMaestro<FOSubP) do
2.1 Resolver Maestro
2.2 Resolver dual del problema clásico (MST clásico).
2.3 Agregar corte de Benders
3. end while
4. Return ,

Definición 4 (Regret local): Se tiene un grafo , donde se asume que falta
agregar sólo un nodo a la solución. Luego el aporte al regret (o regret local) de cada arista
se puede estimar como la máxima diferencia entre el límite superior de dicha arista con el
límite inferior del resto de las aristas que conectan el nodo. El regret local de cada arista se
compone de dos aportes (uno por cada nodo perteneciente a la arista).
Utilizando este criterio se puede generar una matriz, luego, una alternativa válida
consiste en aplicar los algoritmos clásicos para resolver problemas de árbol, a esta matriz.
Matemáticamente la generación de la matriz de Regret locales se presenta a continuación.
Input: Grafo , costos y matriz
Output: Matriz
1. forall (i,j) E
2.
3.
4.
5.
6.
7. end forall
8. return
Como se puede apreciar el algoritmo anterior funciona como una fase previa a algún
algoritmo clásico para la resolución del MST, no obstante, a continuación se propone una
mejora, que actualiza la información de la matriz de R cada vez que se agrega un nuevo
nodo a la solución. Adicionalmente, esta nueva estructura se utilizará en la fase
constructiva del algoritmo GRASP, el pseudocódigos se presenta a continuación. En este
trabajo se utilizará la vecindad propuesta en (Kasperski et al., 2012).
Input: Grafo , costos y matriz
Output: solution
1. forall (i,j) E
2. ;
3.
;
4.
5. end forall
6. select
7. add ( , ) to solution, add and to nodesolution
8. size solution = 1
9. while size
10. forall (i,j) E
11. ,
12. ,
13.
14.
15.
16. end forall
17. select in
18. add to nodesolution, add ) to solution
19. Size solution = size solution + 1
20. end while
21. return solution

C. RESULTADOS Se utilizó un subconjunto de las instancias propuestas en (Kasperski et al., 2012), en
particular, aquellas instancias clasificadas como difíciles (Ya, He0, He1, y Mo) en el
trabajo antes mencionado. Se utilizan 10 instancias por cada tipo y tamaño para obtener las
estadísticas presentadas más adelante. Todos los algoritmos fueron implementados en C++
utilizando Leda en su versión libre, para los algoritmos exactos se utilizó la versión IBM
ILOG CPLEX Optimization Studio V12.3 y la máquina utilizada tiene un procesador Intel
core i7-3610QM con 8 GB de RAM.
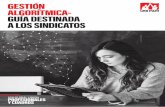
En la ilustración 1 se presentan las instancias de forma agregada. De la Ilustración 1
(izquierda) se puede observar, en primer lugar que es el algoritmo que resuelve la
mayor cantidad de instancias dentro del tiempo límite (85%). Además, es el algoritmo que
domina al MILP y EBD para todo el intervalo evaluado. El algoritmo que presenta un peor
desempeño es el EBD. De la Ilustración 1 (derecha) de forma complementaria se puede
observar lo que sucede con los gaps de aquellas instancias que no son resultas en el óptimo,
luego se aprecia que los gaps del B&C son menores pues el 100% de las instancias tiene un
gap menor o igual 25% (aprox.) en comparación con al 65% del EBD y al 200% del MILP.
Por otra parte se aprecia que el EBD a través de un análisis de gaps finales agregados de las
instancias logra superar al MILP, pues sus gaps máximos son menores.
Específicamente, a través de esta experimentación se pudo observar en primer lugar
que el algoritmo B&C es superior al EBD para todos los conjuntos de instancias y en todas
las dimensiones evaluadas. Es posible constatar también que para cierto conjunto de
instancias el algoritmo B&C es notoriamente superior al MILP (Ya(C,2C), He0 y Mo). Sin
embargo, para dos grupos de instancias no se nota con claridad la supremacía del B&C
(Ya(C,C) y He1). También se pudo verificar que el incremento en el tiempo del MILP
tiende a crecer más bruscamente que en el caso del B&C; por ende se puede inferir que su
eficiencia disminuye en mayor proporción, lo que se complementa con el análisis gráfico
del gap donde el MILP muestra que para un porcentaje de instancias puede generar gaps
muy grandes.
Luego es posible concluir que el EBD deja de ser competitivo para instancias de más de 40
nodos como se menciona en la literatura. Además, el MILP tiene conjuntos de instancias
para los cuales simplemente deja de ser alternativa como lo son Ya(C,2C) y He0, pues para
el primer caso existen instancias donde no se obtiene solución factible y para el segundo
caso entrega gaps sobre el 100%, que de acuerdo a lo descrito en la experimentación
radican principalmente en la calidad del LB.
ILUSTRACIÓN 1. RENDIMIENTO DE ALGORITMOS EXACTOS

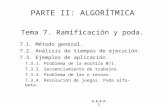
B&C es el algoritmo que presenta el mejor desempeño, es natural presentar el
comportamiento de este en relación al tamaño del problema y la estructura de costo
analizada. En la ilustración 2 se puede observar el comportamiento del algoritmo en dos
conjuntos de instancias; ) donde representa el tamaño del intervalo; donde
y representan el límite superior e inferior respectivamente. Del gráfico del lado
izquierdo se demuestra que el algoritmo propuesto tiende a disminuir su desempeño a
medida que la longitud del intervalo aumenta, adicionalmente, de esta imagen se puede
inferir complejidad asociada al problema, pues para las instancias no es posible
resolver siquiera una. De la gráfica del lado derecho se puede extraer información similar a
la antes mencionada, ya que nuevamente, la estructura de costo tiene un impacto en el
desempeño del algoritmo en este caso se observa que las instancias del tipo Ya(C,C)
tienden a tener un crecimiento significativamente superior a las instancias del tipo
Ya(C,2C).
ILUSTRACIÓN 2. COMPORTAMIENTO DE B&C SEGÚN ESTRUCTURA DE COSTOS
En relación a las Heurísticas, se tomará como muestra las instancias del tipo Ya, las
heurísticas comparadas son; Hu Límite superior; Hm Punto medio; Hc Constructiva
Básica; Hcd Constructiva dinámica. De la tabla 1, en primer lugar Hm se muestra como la
peor heurística obteniendo resultados competitivos sólo para instancias con 30 o menos
nodos. Hu se perfila como la mejor alternativa, sin embargo, para todos los conjuntos de
instancias las nuevas heurísticas aportan con a lo menos 1 mejor solución, más aún existen
situaciones donde estas heurísticas proveen la mayor cantidad de mejores soluciones (*).
En relación a la mejora entregada por el dinamismo a la heurística constructiva simple se
puede observar que aporta para un gran número de conjuntos de instancias (20/30).
En la tabla 2 se presentan los resultados de las Metaheurísticas para 100 nodos; se
puede observar que la presenta el mejor desempeño es SA (desviaciones porcentuales
menores al 0.22%), sin embargo, este algoritmo también presenta los mayores tiempos de
ejecución. Por otra parte, mejora iterativa entrega soluciones con una desviación porcentual
menor al 2% y en un tiempo menor a 30 segundos, lo que la convierte en una
metaheurística rápida y con soluciones de calidad. Con un desempeño intermedio se
encuentra GRASP obteniendo gaps menores al 1% y los tiempos son un poco más que la
mitad del tiempo de SA). En cuanto al desempeño individual, SA sólo en una ocasión no
logra obtener la mejor solución conocida, en tanto GRASP y mejora iterativa no lo logran
en 3 y 8 instancias respectivamente. Las heurísticas básicas proveen peores gap iniciales en

las instancias He0 y Mo(0.85), esto provoca que mejora iterativa obtenga un peor
desempeño, esta situación no se visualiza en SA. Finalmente, se puede concluir que para
100 nodos no se logra mejorar los resultados de (Kasperski et al., 2012), sin embargo las
tres metaheurísticas obtienen desviaciones relativas menores al 2%.
Hc Hcd Hu Hm
Hc Hcd Hu Hm
Ya(10,10)-20* 4.00 4.00 3.00 1.00 Ya(15,15)-20 2.00 3.00 3.00 5.00
Ya(10,10)-40* 5.00 3.00 4.00 0.00 Ya(15,15)-40 1.00 3.00 8.00 0.00
Ya(10,10)-60 2.00 4.00 6.00 0.00 Ya(15,15)-60 4.00 4.00 6.00 0.00
Ya(10,10)-80* 2.00 3.00 5.00 0.00 Ya(15,15)-80* 2.00 3.00 5.00 0.00
Ya(10,10)-100 2.00 3.00 7.00 0.00 Ya(15,15)-100* 2.00 5.00 3.00 0.00
Ya(10,20)-20 6.00 4.00 8.00 0.00 Ya(15,30)-20 4.00 6.00 7.00 0.00
Ya(10,20)-40 3.00 5.00 6.00 0.00 Ya(15,30)-40 5.00 6.00 6.00 0.00
Ya(10,20)-60 3.00 5.00 7.00 0.00 Ya(15,30)-60 4.00 2.00 6.00 0.00
Ya(10,20)-80 1.00 3.00 7.00 0.00 Ya(15,30)-80 2.00 3.00 7.00 0.00
Ya(10,20)-100 0.00 0.00 10.00 0.00 Ya(15,30)-100 1.00 3.00 8.00 0.00
Ya(20,20)-20 2.00 5.00 6.00 3.00 Ya(20,40)-20 4.00 5.00 8.00 0.00
Ya(20,20)-40* 2.00 5.00 5.00 0.00 Ya(20,40)-40 4.00 6.00 7.00 0.00
Ya(20,20)-60 2.00 1.00 9.00 0.00 Ya(20,40)-60 6.00 3.00 8.00 0.00
Ya(20,20)-80 3.00 2.00 6.00 0.00 Ya(20,40)-80 1.00 4.00 7.00 0.00
Ya(20,20)-100 3.00 1.00 7.00 0.00 Ya(20,40)-100 2.00 4.00 6.00 0.00 TABLA 1. NÚMERO DE INSTANCIAS DONDE SE OBTIENE LA MEJOR SOLUCIÓN.
H. B.
Mejora Iterativa SA GRASP
Instancia Min av. Max T min av. max T min av. max T
Ya(10-10)-1 0.1 0.00 0.05 0.06 22.81 0.00 0.01 0.06 420.39 0.00 0.01 0.05 258.91
Ya(10-10)-4 0.2 0.00 0.09 0.17 24.94 0.00 0.00 0.00 344.10 0.00 0.09 0.18 251.17
Ya(10-10)-5 0.1 0.00 0.05 0.13 20.37 0.00 0.00 0.05 332.21 0.03 0.08 0.14 247.14
Ya(10-10)-6 0.1 0.00 0.11 0.14 19.48 0.00 0.02 0.14 299.21 0.00 0.04 0.14 223.84
Ya(10-20)-3 0.0 0.00 0.00 0.00 26.88 0.00 0.00 0.00 494.42 0.00 0.03 0.10 259.33
Ya(10-20)-4 0.0 0.00 0.00 0.00 30.87 0.00 0.00 0.00 488.54 0.00 0.03 0.08 285.69
Ya(10-20)-5 0.1 0.00 0.06 0.08 30.26 0.00 0.00 0.01 453.91 0.00 0.02 0.08 274.56
Ya(10-20)-6 0.0 0.00 0.00 0.00 28.73 0.00 0.00 0.00 415.97 0.00 0.01 0.02 256.34
He0-1 1.7 0.07 0.36 0.49 11.87 0.00 0.11 0.22 167.28 0.00 0.26 0.45 120.60
He0-3 5.2 0.27 0.53 1.44 11.53 0.04 0.21 0.22 162.28 0.00 0.10 0.22 117.07
He0-5 1.7 0.19 0.32 0.45 11.52 0.00 0.01 0.06 243.01 0.00 0.02 0.06 117.32
He0-7 2.9 0.02 0.35 1.45 12.65 0.00 0.00 0.01 247.18 0.00 0.07 0.18 127.87
Mo(0.85)-3 1.6 0.00 0.37 0.80 15.34 0.00 0.00 0.05 217.62 0.03 0.24 0.65 177.83
Mo(0.85)-6 2.1 0.00 0.64 1.50 14.58 0.00 0.00 0.00 256.89 0.00 0.47 0.84 165.83
Mo(0.85)-8 1.9 0.00 0.20 0.67 14.47 0.00 0.00 0.00 277.66 0.00 0.02 0.11 151.17
Mo(0.85)-9 0.7 0.14 0.33 0.48 16.11 0.00 0.04 0.14 243.86 0.14 0.49 0.81 153.49 TABLA 2. MÍNIMA (MIN), PROMEDIO (AV.) Y MÁXIMA DESVIACIÓN PORCENTUAL DESDE SOLUCIÓN DE
REFERENCIA PARA INSTANCIAS CON 100 NODOS.

D. CONCLUSIONES En este estudio se ha trabajado el Problema del Árbol de Expansión Robusto con
incertidumbre intervalar en los costos (MMR-ST) desde un punto de vista algorítmico, tanto
exacto como heurístico. Este es un problema de gran complejidad (NP-Hard) y que en la
literatura ha sido abordado a través de diferentes algoritmos; particularmente desde el punto
de vista exacto sólo se ha trabajado con grafos de hasta 40 nodos. En este trabajo se
propuso una variedad de algoritmos, que según la experimentación antes mostrada son
competitivos.
Con respecto a los métodos exactos, se desarrollan tres variantes del algoritmo de
descomposición de Benders y un algoritmo Branch and Cut, además se implementa una
formulación compacta del problema, la que es resuelta a través de Cplex (versión 12.3). El
algoritmo exacto que presenta el mejor desempeño es B&C, siendo capaz de resolver
nuevas instancias. Además, se mejoran las cotas inferiores para todo el conjunto de
instancias estudiadas.
Desde el punto de vista heurístico, se entregan dos constructivas nuevas que son
capaces de entregar mejores soluciones que Hu y Hm en algunos conjuntos de instancias.
En relación a la heurística constructiva dinámica, se pudo observar que en gran cantidad de
ocasiones entrega soluciones de mejor calidad que la versión básica. Por otra parte se
implementaron 3 metaheurísticas basadas en búsqueda local; mejora iterativa, Simulated
Annealing y GRASP, todas utilizando la misma vecindad. Las metaheurísticas propuestas
obtienen soluciones de similar calidad a lo propuesto en la literatura, existiendo un claro
trade off entre tiempo y calidad del gap, pues dicha mejora iterativa obtiene buenos
resultados en muy poco tiempo. Sin embargo, estos resultados son mejorados por GRASP y
SA siendo que estos últimos requieren de un mayor tiempo de ejecución.
En el presente trabajo se estudiaron distintos conjuntos de instancias, comprobando
que tanto la topología del problema como la estructura de costos, generan de forma
independiente un impacto en la complejidad del problema.
E. REFERENCIAS Aissi, H., Bazgan, C., & Vanderpooten, D. (2005). Approximation complexity of min-
max (regret) versions of shortest path, spanning tree, and knapsack. LNCS , 3669, 862–
873.
Álvarez-Miranda, E., Ljubic, I., Raghavan, S., & Toth, P. (2012). The Recoverable
Robust Two-Level Network Design Problem.
Aron, I., & Van Hentenryck, P. (2002). A contraint satisfaction approach to the robust
spanning tree with interval data. Proccedings of the international Conference on
Uncertainty in Artificial Intelligence , UAI, 18-25.
Aron, I., & Van Hentenryck, P. (2004). On Complexity of the robust spanning tree
problem with interval data. Operations Research Letters , 32, 36-40.
Boruvka, O. (1926). O jistém problému minimálním. Práce Mor. Prirodoved , 3, 37–
58.
Candia-Véjar, A., Álvarez-Miranda, E., & Maculan, N. (2011). Minmax regret
combinatorial optimization problems:an alalgorithmic perspective. RAIRO , 101-129.
Feo, T., & Resende, M. (1989). A probabilistic heuristic for a computationally dificult
set covering problem. Operations Research Letters , 67-71.

Feo, T., & Resende, M. (1995). Greedy randomized adaptive search procedures. J. of
Global Optimization , 109-133.
Festa, P., & Resende, M. (2008). An annotated bibliography of GRASP part II:
Applications. AT&T Labs Research Technical Report. , 1-42.
Festa, P., & Resende, M. (2001). GRASP: An annotated bibliography. AT&T Labs
Research Technical Report , 1-39.
Graham, R., & Hell, P. (1985). On the History of the Minimum Spanning Tree problem.
Annals of the History of Computing , 43-57.
Karasan, O., Pinar, M., & Yaman, H. (2001). The Robust shortest path problem with
interval data. Bilkent University.
Kasperski, A. (2008). Discrete Optimization with Interval Data. Berlin: Springer.
Kasperski, A., & Zielinski, P. (2006). An approximation algorithm for interval data
minmax regret combinatorial optimization problems. Inf. Processing Letters , 97, 177-
180.
Kasperski, A., Makuchowski, M., & Zielinski, P. (2012). A tabu search algorithm for
the minmax regret minimum spanning tree problem with interval data. J Heuristics ,
593-625.
Kruskal, J. (1956). On the shortest spanning subtree of a graph and the travelling. Proc.
Amer. Math. Soc. , 7, 48-50.
Magnanti, T., & Wolsey, L. (1995). Optimal Trees. En Magnanti & Neumhauser
Handbook of Operations Research and Management Science (págs. 503-615). North-
Holland.
Montemanni, R. (2006). A Benders decomposition approach for the robust spanning
tree proble with intervalar data. Eur. J. Oper. Res. , 174, 1479–1490.
Montemanni, R., & Gambardella, L. (2005). A branch and bound algorithm for the
ronust spanning tree with interval data. European journal Operation Research , 161,
771-779.
Montemanni, R., Barta, J., & Gambardella, L. (2007). The robust travelling salesman
problem with intervalar data. Transportation science , 41 (3), 366-381.
Nesetril, J., Milková, E., & Nesetrilová, (2001). Otakar Boruvka on minimum spanning
tree problem: Translation of both the 1926 papers, comments, history. Dis. Math. 233,
3-36.
Nikulin, Y. (2008). Simulated annealing algorithm for the robust spanning tree. Journal
Heuristic , 14, 391-402.
Pereira, J., & Averbakh, I. (2011). The Robust Set Covering Problem with intervalar
data. Ann Oper Res .
Prim, R. (1957). Shortest connection networks and some generalizations. Bell System
Technical Journal , 36, 567-574.
Yaman, H., Karasan, O., & Pinar, M. (2001). The robust spanning tree problem with
interval data. Operations Research Letters , 29, 31-40.