¿Qué es un motor eléctrico?
10
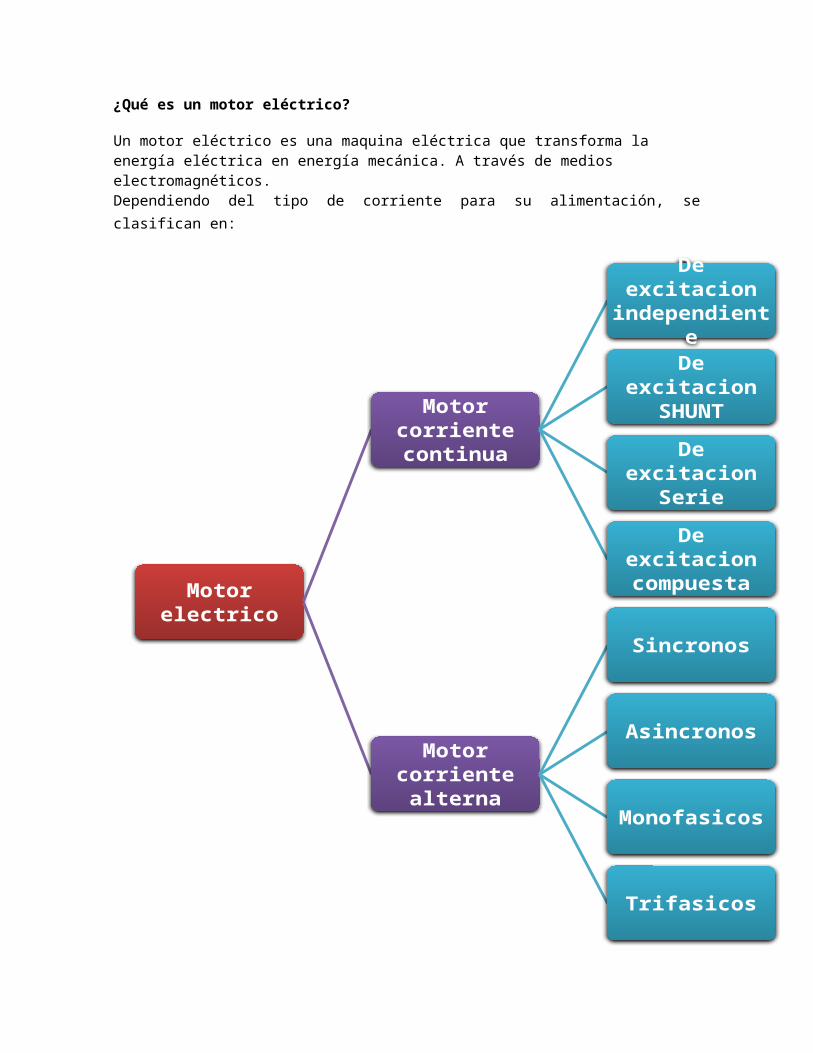
¿Qué es un motor eléctrico? Un motor eléctrico es una maquina eléctrica que transforma la energía eléctrica en energía mecánica. A través de medios electromagnéticos. Dependiendo del tipo de corriente para su alimentación, se clasifican en: Motor electrico Motor corriente continua De excitacion independient e De excitacion SHUNT De excitacion Serie De excitacion compuesta Motor corriente alterna Sincronos Asincronos Monofasicos Trifasicos
-
Upload
jorge-vongola -
Category
Education
-
view
71 -
download
3
Transcript of ¿Qué es un motor eléctrico?
¿Qué es un motor eléctrico?
Un motor eléctrico es una maquina eléctrica que transforma la energía eléctrica en energía mecánica. A través de medios electromagnéticos.Dependiendo del tipo de corriente para su alimentación, se clasifican en:
Motores eléctricos:
Motor electrico
Motor corriente continua
De excitacion
independiente
De excitacion
SHUNT
De excitacion
Serie
De excitacion compuesta
Motor corriente alterna
Sincronos
Asincronos
Monofasicos
Trifasicos
Motores de corriente continua: La corriente no varía con respecto al tiempo.
Motores de corriente alterna: La corriente varía con respecto al tiempo.
Motores de corriente universal: Son de velocidad variable.
Fundamentos de operación de los motores eléctricos:
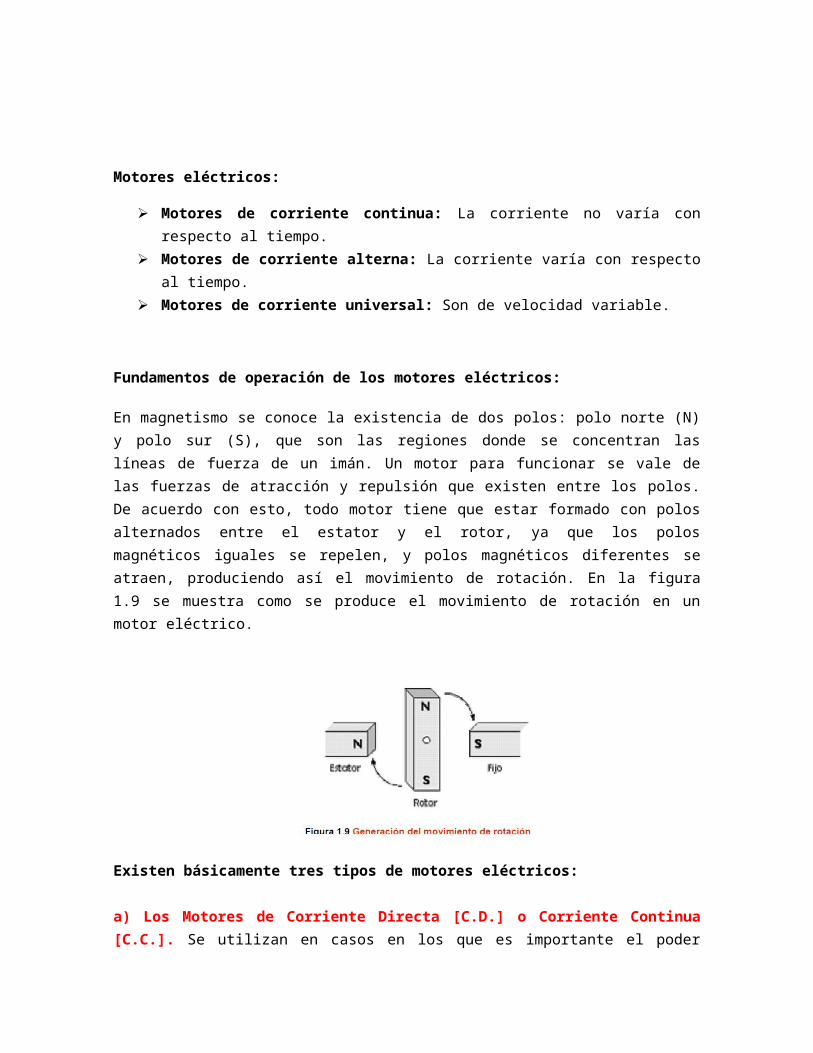
En magnetismo se conoce la existencia de dos polos: polo norte (N) y polo sur (S), que son las regiones donde se concentran las líneas de fuerza de un imán. Un motor para funcionar se vale de las fuerzas de atracción y repulsión que existen entre los polos. De acuerdo con esto, todo motor tiene que estar formado con polos alternados entre el estator y el rotor, ya que los polos magnéticos iguales se repelen, y polos magnéticos diferentes se atraen, produciendo así el movimiento de rotación. En la figura 1.9 se muestra como se produce el movimiento de rotación en un motor eléctrico.
Existen básicamente tres tipos de motores eléctricos:
a) Los Motores de Corriente Directa [C.D.] o Corriente Continua [C.C.]. Se utilizan en casos en los que es importante el poder regular continuamente la velocidad del motor, además, se utilizan en aquellos casos en los que es NECESARIO utilizar corriente directa, como es el caso de motores accionados por pilas o baterías. Este tipo de motores debe de tener en el rotor y el estator el mismo número de polos y el mismo número de carbones. Los motores de corriente directa pueden ser de tres tipos:• Serie• Paralelo• Mixto

b) Los Motores de Corriente Alterna [C.A.]. Son los tipos de motores más usados en la industria, ya que estos equipos se alimentan con los sistemas de distribución de energías “normales”. De acuerdo a su alimentación se dividen en tres tipos:
Monofásicos (1 fase) Bifásicos (2 fases) Trifásicos (3 fases)
c) Los Motores Universales. Tienen la forma de un motor de corriente continua, la principal diferencia es que está diseñado para funcionar con corriente alterna. El inconveniente de este tipo de motores es su eficiencia, ya que es baja (del orden del 51%), pero como se utilizan en máquinas de pequeña potencia, ésta no se considera importante, además, su operación debe ser intermitente, de lo contrario, éste se quemaría. Estos motores son utilizados en taladros, aspiradoras, licuadoras, etc.
Partes fundamentales de un motor eléctrico
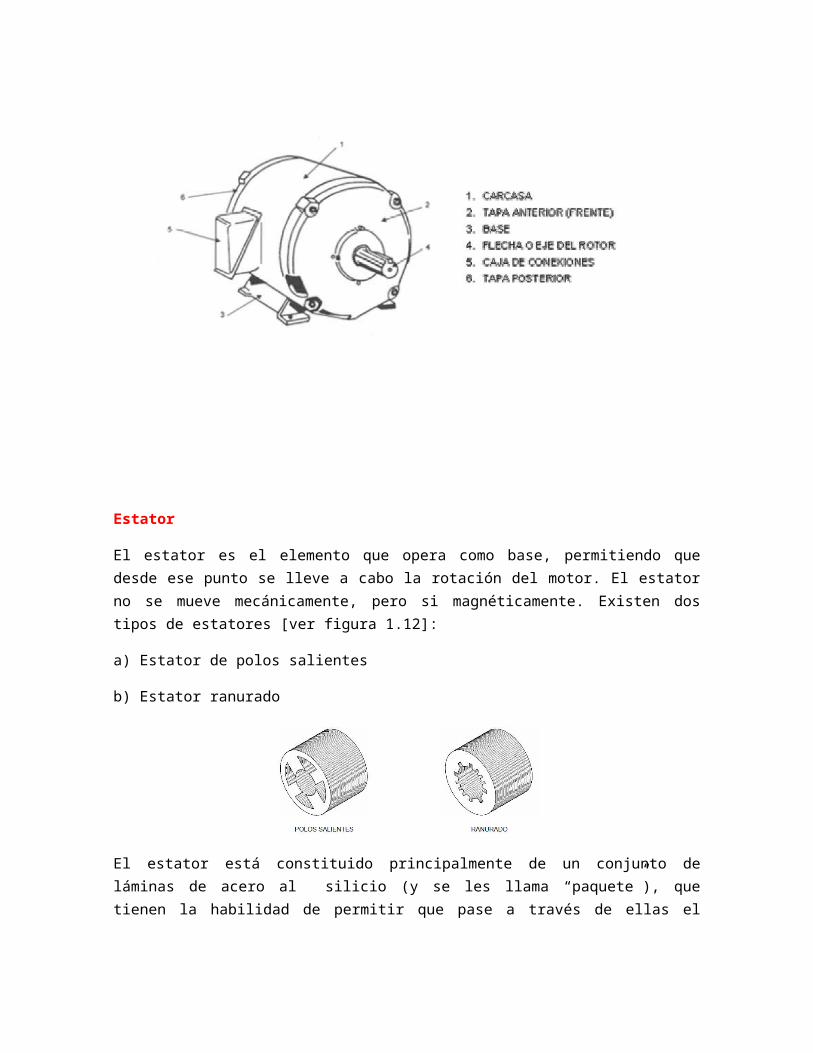
Dentro de las características fundamentales de los motores eléctricos, éstos se hallan formados por varios elementos, sin embargo, las partes principales son: El estator, la carcasa, la base, el rotor, la caja de conexiones, las tapas y los cojinetes [véase figura 1.10]. No obstante, un motor puede funcionar solo con el estator y el rotor.
Estator
El estator es el elemento que opera como base, permitiendo que desde ese punto se lleve a cabo la rotación del motor. El estator no se mueve mecánicamente, pero si magnéticamente. Existen dos tipos de estatores [ver figura 1.12]:
a) Estator de polos salientes
b) Estator ranurado
El estator está constituido principalmente de un conjunto de láminas de acero al silicio (y se les llama “paquete”), que tienen la habilidad de permitir que pase a través de ellas el flujo magnético con facilidad; la parte metálica del estator y los devanados proveen los polos magnéticos.
Los polos de un motor siempre son pares (pueden ser 2, 4, 6, 8, 10, etc.,), por ello el mínimo de polos que puede tener un motor para funcionar es dos (un norte y un sur).
RotorEl rotor es el elemento de transferencia mecánica, ya que de él depende la conversión de energía eléctrica a mecánica. Los rotores, son un conjunto de láminas de acero al silicio que forman un paquete, y pueden ser básicamente de tres tipos [figura 1.13]:a) Rotor ranuradob) Rotor de polos salientesc) Rotor jaula de ardilla
Carcasa

La carcasa es la parte que protege y cubre al estator y al rotor, el material empleado para su fabricación depende del tipo de motor, de su diseño y su aplicación. Así pues, la carcasa puede ser:a) Totalmente cerradab) Abiertac) A prueba de goteod) A prueba de explosionese) De tipo sumergible
BaseLa base es el elemento en donde se soporta toda la fuerza mecánica de operación del motor, puede ser de dos tipos:a) Base frontalb) Base lateral
Caja de conexionesPor lo general, en la mayoría de los casos los motores eléctricos cuentan con caja de conexiones. La caja de conexiones es un elemento que protege a los conductores que alimentan al motor, resguardándolos de la operación mecánica del mismo, y contra cualquier elemento que pudiera dañarlos.
TapasSon los elementos que van a sostener en la gran mayoría de los casos a los cojinetes o rodamientos que soportan la acción del rotor.
CojinetesTambién conocidos como rodamientos, contribuyen a la óptima operación de las partes giratorias del motor. Se utilizan para sostener y fijar ejes mecánicos, y para reducir la fricción, lo que contribuye a lograr que se consuma menos potencia. Los cojinetes pueden dividirse en dos clases generales:a) Cojinetes de deslizamiento [ver figura 1.14].- Operan el base al principio de la película de aceite, esto es, que existe una delgada capa de lubricante entre la barra del eje y la superficie de apoyo.
Cojinetes de rodamiento Cojinetes de rodamiento [véase figura 1.15].- Se utilizan con preferencia en vez de los cojinetes de deslizamiento por varias razones:• Tienen un menor coeficiente de fricción, especialmente en el arranque.
• Son compactos en su diseño• Tienen una alta precisión de operación.• No se desgastan tanto como los cojinetes de tipo deslizante.• Se remplazan fácilmente debido a sus tamaños estándares
¿Por qué los motores de corriente alterna sustituyeron a los de corriente directa?La ventaja de los motores de corriente continua es que puedes ajustar la velocidad simplemente mediante el aumento de la tensión. Sin embargo, los motores de corriente continua tienen un diseño más complejo, requiriendo cepillos para transferir energía a las partes móviles y un conmutador para invertir periódicamente la tensión. Estas piezas se desgastan con el tiempo debido a la fricción y, finalmente, deben ser reemplazados. Los motores de corriente alterna tienen un diseño más simple, son más eficientes, pero funcionan a velocidades fijas y no pueden operar a bajas velocidades.
¿Qué es un motor sincrónico?
Los motores sincrónicos son naturalmente motores de velocidad constante. Operan en
sincronismo con la línea de frecuencia y comúnmente se los utiliza donde se necesita una
velocidad constante. El motor sincrónico es un motor eléctrico accionado por corriente alterna
que consta de dos componentes básicos: un estator y un rotor. Típicamente, un capacitor
conectado a una bobina del motor, es necesario para la rotación en la dirección apropiada. (No
se necesitan capacitores para los modelos UDS que utilizan una bobina simple con un diente de
engranaje interno para determinar la dirección). El estator fijo exterior contiene bobinas de cobre
que se suministran con una corriente alterna para producir un campo magnético giratorio. El
rotor magnetizado está sujeto al eje de salida y crea una fuerza de torsión debido al campo
giratorio del estator. La velocidad de un motor sincrónico se determina por el número de pares
de polos y es una proporción de la frecuencia de entrada (línea). Al igual que nuestros motores
paso a paso, nuestro motor síncrono puede ofrecer soluciones de movimiento tanto para
aplicaciones rotacionales como para lineales.
1. Nombre del fabricante.
2. Tamaño, forma de construcción.
3. Clase de corriente.
4. Clase de máquina; motor, generador, etc.
5. Número de fabricación.
6. Identificación del tipo de conexión del arrollamiento.
7. Tensión nominal.
8. Intensidad nominal.
9. Potencia nominal. Indicación en kW para motores y generadores de corriente continua e inducción. Potencia aparente en kVA en generadores síncronos.
10. Unidad de potencia, por ejemplo kW.
11. Régimen de funcionamiento nominal.
12. Factor de potencia.
13. Sentido de giro.
14. Velocidad nominal en revoluciones por minuto revol/min.
15. Frecuencia nominal.
16. “Err” excitación en máquinas de corriente continua y máquinas síncronas. “Lfr” inducido para máquinas asíncronas.
17. forma de conexión del arrollamiento inducido.
18. Máquinas de cc y síncronas: tensión nominal de excitación. Motores de inducido de anillos rozantes: tensión de parada del inducido (régimen nominal).
19. Máquinas de cc y síncronas: corriente nominal de excitación. Motores de inducido de anillos rozantes: intensidad nominal del motor.
20. Clase de aislamiento.
21. Clase de protección.
22. Peso en Kg o T.
23. Número y año de edición de la disposición VDE tomada como base.
Motor shunt

El motor shunt o motor de excitación en paralelo es un motor eléctrico de corriente
continua cuyo bobinado inductor principal está conectado en derivación o paralelo con el
circuito formado por los bobinados inducido e inductor auxiliar.
Al igual que en las dinamos shunt, las bobinas principales están constituidas por muchas
espiras y con hilo de poca sección, por lo que la resistenciadel bobinado inductor principal es
muy grande.
En el instante del arranque, el par motor que se desarrolla es menor que en el motor serie
(también uno de los componentes del motor de corriente continua). Al disminuir la intensidad
absorbida, el régimen de giro apenas sufre variación.
Es el tipo de motor de corriente continua cuya velocidad no disminuye más que ligeramente
cuando el par aumenta. Los motores de corriente continua en derivación son adecuados para
aplicaciones en donde se necesita velocidad constante a cualquier ajuste del control o en los
casos en que es necesario un rango apreciable de velocidades (por medio del control del
campo).
El motor en derivación se utiliza en aplicaciones de velocidad constante, como en los
accionamientos para los generadores de corriente continua en los grupos motogeneradores
de corriente continua.
ESCOBILLAS