
Respuesta de un sistema en el tiempo -...
11
Respuesta de un sistema en el tiempo JACG - MEVO Página 1 Respuesta de un sistema en el tiempo La respuesta de salida de un sistema de control es la suma de dos respuestas: la respuesta forzada 1 y la respuesta libre. La existencia de numerosas técnicas, por ejemplo la solución de una ecuación diferencial o tomar la transformada inversa de Laplace, hacen posible evaluar esta respuesta de salida, pero éstas son laboriosas y lentas. La productividad es primordial y por ese motivo es auxiliada por técnicas de análisis y diseño que producen resultados en un mínimo de tiempo. Este método es tan rápido que a veces se piensa que se deduce el resultado por inspección. Además se puede crear una gráfica que represente la respuesta en el tiempo del sistema analizado, o bien con este gráfico, se pueden identificar los parámetros y definir la fórmula. Sistema de primer orden ante la entrada escalón unitario. s P orden e s K FdT er 1 1 1 t SP e K t c 1 ) ( ) ( c K K K P R SP ts c(t) Error ess 0 0 1 100% τ 0,632 0,368 36,80% 2 τ 0,865 0,135 13,50% 3 τ 0,950 0,050 5% 4 τ 0,982 0,018 2% 5 τ 0,993 0,007 1% Consideraciones: 1.- Una FdT de primer orden se compone de una función normalizada perteneciente al dominio de la frecuencia. El componente e Θs sólo se considera cuando el sistema presenta un tiempo de retardo (no se obtiene respuesta desde el origen). 2.- La respuesta en el tiempo de una FdT debe incluir la ganancia del punto de establecimiento. 3.- El KSP es el resultado de la multiplicación de la ganancia de la planta y la ganancia de entrada. C(∞) simplemente es la representación al infinito, es decir, indica que el dato se puede obtener de la gráfica y es el punto de establecimiento KSP. 1 La respuesta forzada también se llama respuesta en estado estable.
Transcript of Respuesta de un sistema en el tiempo -...

Respuesta de un sistema en el tiempo
JACG - MEVO Página 1
Respuesta de un sistema en el tiempo
La respuesta de salida de un sistema de control es la suma de dos respuestas: la respuesta forzada1
y la respuesta libre. La existencia de numerosas técnicas, por ejemplo la solución de una ecuación
diferencial o tomar la transformada inversa de Laplace, hacen posible evaluar esta respuesta de salida,
pero éstas son laboriosas y lentas. La productividad es primordial y por ese motivo es auxiliada por
técnicas de análisis y diseño que producen resultados en un mínimo de tiempo. Este método es tan rápido
que a veces se piensa que se deduce el resultado por inspección. Además se puede crear una gráfica que
represente la respuesta en el tiempo del sistema analizado, o bien con este gráfico, se pueden identificar
los parámetros y definir la fórmula.
Sistema de primer orden ante la entrada escalón unitario.
s
Pordene
sKFdT er
1
11
t
SP eKtc 1)(
)( cKKK PRSP
ts c(t) Error ess
0 0 1 100%
τ 0,632 0,368 36,80%
2 τ 0,865 0,135 13,50%
3 τ 0,950 0,050 5%
4 τ 0,982 0,018 2%
5 τ 0,993 0,007 1%
Consideraciones:
1.- Una FdT de primer orden se compone de una función normalizada perteneciente al dominio de la
frecuencia. El componente eΘs sólo se considera cuando el sistema presenta un tiempo de retardo (no se
obtiene respuesta desde el origen).
2.- La respuesta en el tiempo de una FdT debe incluir la ganancia del punto de establecimiento.
3.- El KSP es el resultado de la multiplicación de la ganancia de la planta y la ganancia de entrada. C(∞) simplemente es la representación al infinito, es decir, indica que el dato se puede obtener de la gráfica y
es el punto de establecimiento KSP.
1 La respuesta forzada también se llama respuesta en estado estable.

Respuesta de un sistema en el tiempo
JACG - MEVO Página 2
Ejemplo:
1.-
R(s) C(s)
Datos:
𝑅(𝑠) = 2
𝑠 (𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑎 𝑎 𝑢𝑛 𝑑𝑜𝑏𝑙𝑒 𝑒𝑠𝑐𝑎𝑙ó𝑛)
C(s)=?
𝐹𝑑𝑇 = 10
3𝑠 + 7
1.- Normalizar FdT
Se comienza factorizando el denominador por el término sin “s”
10
7 (3𝑠7
+ 1)
Posteriormente se factoriza por el numerador por 10
10 ∗ (1)
7 (3𝑠7
+ 1)
Reexpresando
10
7
1
(3𝑠7 + 1)
Recopilación de datos
𝐾𝑃 = 10
7 (𝐸𝑠 𝑙𝑎 𝑔𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑙𝑎 𝑝𝑙𝑎𝑛𝑡𝑎)
𝜏 = 3
7 𝑉𝑎𝑙𝑜𝑟 𝑑𝑒 𝑙𝑎 𝑐𝑜𝑛𝑠𝑡𝑎𝑛𝑡𝑒 𝑑𝑒 𝑡𝑖𝑒𝑚𝑝𝑜 𝑑𝑒 𝑒𝑠𝑡𝑒 𝑒𝑗𝑒𝑟𝑐𝑖𝑐𝑖𝑜 (𝑚𝑒𝑑𝑖𝑑𝑜 𝑒𝑛 𝑠𝑒𝑔𝑢𝑛𝑑𝑜𝑠)
2.- Normalizar la señal de entrada
2 1
𝑠= 𝑑𝑜𝑏𝑙𝑒 𝑒𝑠𝑐𝑎𝑙ó𝑛
Extrayendo datos
𝐾𝑅 = 2 (𝐸𝑠 𝑙𝑎 𝑔𝑎𝑛𝑎𝑛𝑐𝑖𝑎 𝑑𝑒 𝑙𝑎 𝑒𝑛𝑡𝑟𝑎𝑑𝑎)
3.- Utilización de fórmulas
𝐾𝑆𝑃 = 𝐾𝑃 ∗ 𝐾𝑅
𝐾𝑆𝑃 =20
7
FdT

Respuesta de un sistema en el tiempo
JACG - MEVO Página 3
4.- Obtención de la Respuesta en el tiempo
𝑐(𝑡) = 𝐾𝑆𝑃 ∗ (1 − 𝑒−𝑡𝜏)
𝑐(𝑡) = 𝐾𝑆𝑃 ∗ (1 − 𝑒−
𝑡37 )
𝑐(𝑡) = 𝐾𝑆𝑃 ∗ (1 − 𝑒−7𝑡3 )
𝑐(𝑡) = 20
7∗ (1 − 𝑒−
7𝑡3 )
5.- Generación de la gráfica
ts c(t) Error ess Observaciones
0 0 1 100%
Τ 0,632 0,368 36,80% a 1τ se logra el 0,632 del KSP
2 τ 0,865 0,135 13,50% a 2τ se logra el 0,865 del KSP
3 τ 0,95 0,05 5% a 3τ se logra el 0,95 del KSP
4 τ 0,982 0,018 2% a 4τ se logra el 0,982 del KSP
5 τ 0,993 0,007 1% a 5τ se logra el 0,993 del KSP
Desarrollo (recuerde que en este ejercicio τ = 3/7):
𝑐𝑢𝑎𝑛𝑑𝑜 𝑡 = 1τ, 207
∗ 0,632
𝑐𝑢𝑎𝑛𝑑𝑜 𝑡 = 2τ, 207
∗ 0,865
𝑐𝑢𝑎𝑛𝑑𝑜 𝑡 = 3τ, 207
∗ 0,95
𝑐𝑢𝑎𝑛𝑑𝑜 𝑡 = 4τ, 207
∗ 0,982
𝑐𝑢𝑎𝑛𝑑𝑜 𝑡 = 5τ, 207
∗ 0,993
Tabla
Tiempo C(t)
0 0
0,4 1,81
0,9 2,47
1,3 2,71
1,7 2,81
2,1 2,84

Respuesta de un sistema en el tiempo
JACG - MEVO Página 4
Ejercicios:
1.-
R(s) C(s)
Datos:
𝑅(𝑠) = 1,5
𝑠 (𝑟𝑒𝑝𝑟𝑒𝑠𝑒𝑛𝑡𝑎 𝑎 𝑢𝑛 𝑒𝑠𝑐𝑎𝑙ó𝑛 𝑦 𝑚𝑒𝑑𝑖𝑜)
C(s)=?
𝐹𝑑𝑇 = 2
10𝑠 + 4
Determine el tiempo de establecimiento para el error de estado estacionario del 3%
ts ess= 3%
2.- Se tienen:
𝐹𝑑𝑇1 = 7
2𝑠 + 3
𝐹𝑑𝑇2 = 12
10𝑠 + 4
𝐹𝑑𝑇3 = 3
8𝑠 + 4
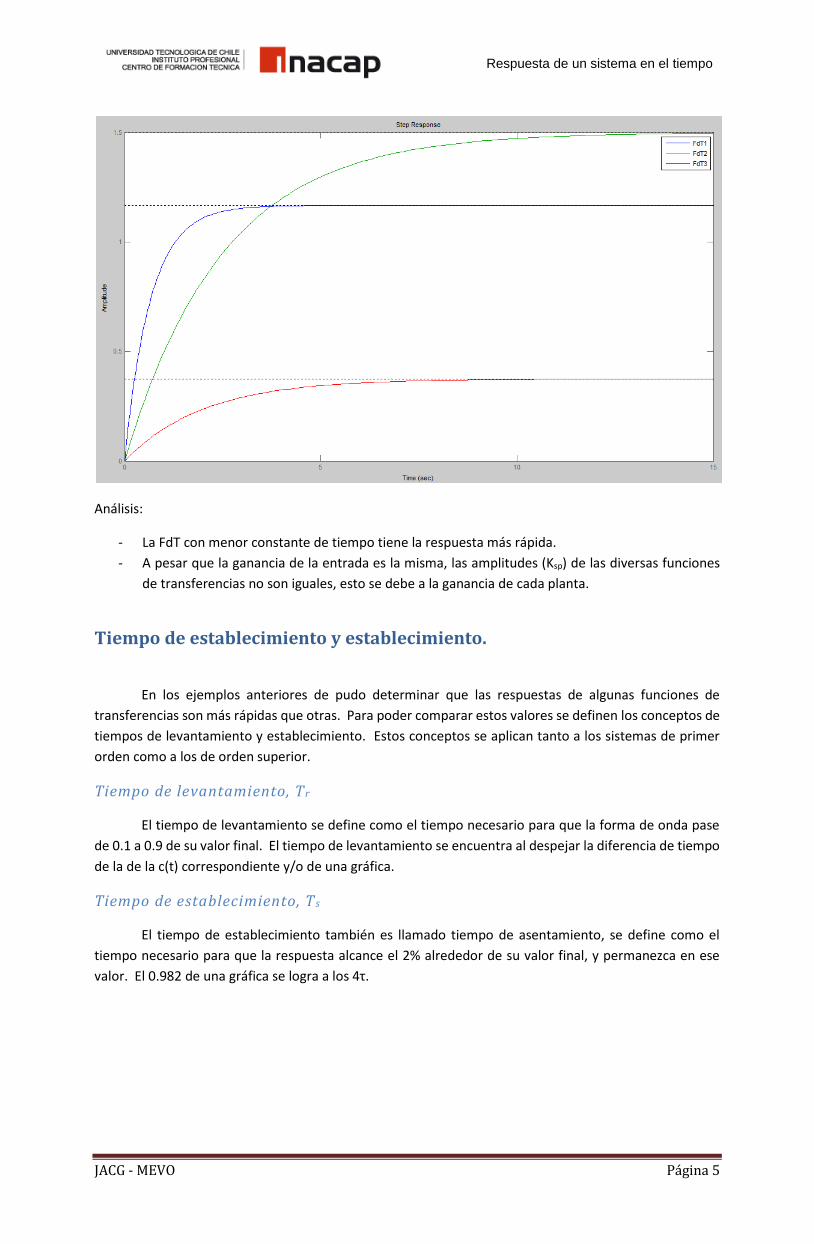
a) ¿Cuál es la función de transferencia que tiene la respuesta más rápida?
b) Determine en cada una la respuesta en el tiempo [c(t)], si la entrada es de medio escalón.
c) Represente las 3 respuestas en un solo gráfico.
FdT
Respuesta de un sistema en el tiempo
JACG - MEVO Página 5
Análisis:
- La FdT con menor constante de tiempo tiene la respuesta más rápida.
- A pesar que la ganancia de la entrada es la misma, las amplitudes (Ksp) de las diversas funciones
de transferencias no son iguales, esto se debe a la ganancia de cada planta.
Tiempo de establecimiento y establecimiento.
En los ejemplos anteriores de pudo determinar que las respuestas de algunas funciones de
transferencias son más rápidas que otras. Para poder comparar estos valores se definen los conceptos de
tiempos de levantamiento y establecimiento. Estos conceptos se aplican tanto a los sistemas de primer
orden como a los de orden superior.
Tiempo de levantamiento, Tr
El tiempo de levantamiento se define como el tiempo necesario para que la forma de onda pase
de 0.1 a 0.9 de su valor final. El tiempo de levantamiento se encuentra al despejar la diferencia de tiempo
de la de la c(t) correspondiente y/o de una gráfica.
Tiempo de establecimiento, T s
El tiempo de establecimiento también es llamado tiempo de asentamiento, se define como el
tiempo necesario para que la respuesta alcance el 2% alrededor de su valor final, y permanezca en ese
valor. El 0.982 de una gráfica se logra a los 4τ.

Respuesta de un sistema en el tiempo
JACG - MEVO Página 6
Sistemas de segundo orden: Introducción.
En comparación con la sencillez de un sistema de primer orden, un sistema de segundo orden tiene
una amplia variedad de respuestas que deben ser analizadas y descritas. Mientras que la variación de un
parámetro de un sistema de primer orden simplemente cambia la velocidad de la respuesta, cambios en
los parámetros de un sistema de segundo orden pueden modificar la forma de la respuesta. Por ejemplo,
un sistema de segundo orden puede mostrar características muy semejantes a las de un sistema de primer
orden, o bien, dependiente de los valores de componentes, mostrar oscilaciones amortiguadas o puras
para su respuesta transitoria.
Para familiarizarse con la amplia variedad de respuestas antes de formalizar un análisis, se
analizará una imagen con ejemplos numéricos de las respuestas del sistema de segundo orden. Todos los
ejemplos se deducen de la forma general (a), este caso tiene dos polos finitos y ningún cero. El término
del numerador es simplemente un escalar o factor multiplicador de entrada que puede tomar cualquier
valor sin afectar la forma de los resultados deducidos. Al asignar los valores apropiados a los parámetros
a y b, se pueden demostrar todas las posibles respuestas transitorias de segundo orden. La respuesta de
escalón unitario que se puede hallar usando C(s)=R(s)*G(s) donde R(s) es una entrada escalón (1/s). Para
encontrar la función en el tiempo, se expande la función en fracciones parciales y se aplica la inversa de
Laplace.

Respuesta de un sistema en el tiempo
JACG - MEVO Página 7
Respuesta Sobreamortiguada (b)
𝐶(𝑠) =9
𝑠(𝑠2 + 9𝑠 + 9)=
9
𝑠(𝑠 + 7.854)(𝑠 + 1.146)
Esta función tiene un polo en el origen que viene de la entrada de escalón unitario y dos polos
reales que vienen del sistema. El polo de entrada en el origen genera la respuesta forzada constante y
cada uno de los dos polos del sistema sobre el eje real genera una respuesta natural exponencial, esta
respuesta se llama sobreamortiguada porque se refiere a una gran cantidad de absorción de energía en el
sistema, lo que inhibe la respuesta transitoria para el sobrepaso (sobreimpulso) y la oscilación alrededor
del valor en estado estable para una entrada escalón.

Respuesta de un sistema en el tiempo
JACG - MEVO Página 8
Respuesta subamortiguada (c)
𝐶(𝑠) =9
𝑠(𝑠2 + 2𝑠 + 9)
Esta función tiene un polo en el origen que viene de la entrada de escalón unitario y dos polos
complejos que vienen del sistema. La figura muestra una respuesta general, senoidal amortiguada, para
un sistema de segundo orden. La respuesta senoidal recibe el nombre de frecuencia natural amortiguada
de oscilación, ωd.
Respuesta no amortiguada (d)
𝐶(𝑠) =9
𝑠(𝑠2 + 9)
Esta función tiene un polo en el origen que proviene de la entrada de escalón unitario y dos polos
imaginarios que vienen del sistema. El polo de entrada en el origen genera la respuesta forzada constante,
y los dos polos del sistema sobre el eje imaginario en ±j3 generan una respuesta libre senoidal. Nótese
que la ausencia de una parte real en el par de polos corresponde a una exponencial que no decae
(matemáticamente es e-0t=1).
Respuesta críticamente amortiguada (e).
𝐶(𝑠) =9
𝑠(𝑠2 + 6𝑠 + 9)=
9
𝑠(𝑠 + 3)2
Esta función tiene un polo en el origen que viene de la entrada de escalón unitario y dos polos reales
múltiples que provienen del sistema. El polo de entrada en el origen genera la respuesta forzada constante
y los dos polos sobre el eje real en -3 generan una respuesta libre formada por una exponencial y una
exponencial multiplicada por t (el tiempo).
Este tipo de respuesta es la más rápida posible, se llama críticamente amortiguada, no tiene el
sobrepaso que es característico de la respuesta subamortiguada.

Respuesta de un sistema en el tiempo
JACG - MEVO Página 9
Figura 1: Respuesta escalón para casos de amortiguamiento de un sistema de segundo orden.
El sistema general de segundo orden.
Ahora que nos hemos familiarizado con los sistemas de segundo orden y sus respuestas, se
generalizará el análisis y se establecerán especificaciones cuantitativas definidas en forma tal que la
respuesta de un sistema de segundo orden se pueda describir, sin necesidad de trazar la respuesta.
En cualquier FdT de segundo orden se pueden describir las características de la respuesta
transitoria analizando dos cantidades, una se llama frecuencia natural y el otro factor de amortiguamiento
relativo.
Factor de amortiguamiento relativo, ζ
El factor o razón de amortiguamiento relativo es una cantidad que compara la frecuencia de decaimiento exponencial de la envolvente con la frecuencia natural. Este cociente es constante cualquiera sea la escala de tiempo de la respuesta. Se debe recordar que cuando se comparan 2 magnitudes mediante una división, se dirá que esas 2 magnitudes se encuentran en una razón.
Frecuencia natural ωn
La frecuencia natural de un sistema de segundo orden es la frecuencia de oscilación del sistema sin
amortiguamiento.
Procedimiento para normalizar funciones de transferencias de segundo orden
En algunas ocasiones, se entregará la función de transferencia de la planta, lamentablemente no todas se
presentan de la forma:
s
n
nP
s
nn
nPorden
ess
Kess
KFdT do
22
2
22
2
222
Para normalizar la FdT, se desarrollará el siguiente ejemplo:
𝐹𝑑𝑇1 =12
4𝑠2 + 2,3𝑠 + 63,6

Respuesta de un sistema en el tiempo
JACG - MEVO Página 10
Una Función normalizada sólo debe tener el término s2 multiplicado por 1, en este ejemplo el
valor que multiplica es 4, se procederá a factorizar por 4 para lograr una FdT normalizada.
12
4 ∗ (𝑠2 + 2,34
𝑠 +63,6
4)
Posteriormente se deberá obtener el tercer término del denominador en el numerador, por ese
motivo se multiplicará por 63,6
4 el numerador. Para no alterar la FdT, también se multiplicará el
denominador por 63,6
4, es decir:
12
4 ∗ (𝑠2 + 2,34 𝑠 +
63,64 )
(
63,64
63,64
)
Reexpresando la FdT resultante:
(12
63,64
∗ 4)
63,64
(𝑠2 + 2,34
𝑠 +63,6
4)
Simplificando algunos términos:
(12
63,6)
63,64
(𝑠2 + 2,34
𝑠 +63,6
4)
Se puede concluir que:
𝐾𝑝 = (12
63,6) , la función normalizada es:
63,6
4
(𝑠2+ 2,3
4𝑠+
63,6
4)
Nota: El componente eΘs no está presente en el ejercicio porque el sistema no presenta un tiempo de
retardo.
Una vez normalizada la FdT, se podrá crear un gráfico siempre y cuando se determine el tipo de
respuesta de la curva y se defina la entrada del sistema. Posteriormente se deberá usar el formulario para
obtener todos los datos asociados a la respuesta del sistema. Considere que ya cuenta con los valores del
factor de amortiguamiento relativo (ζ) y la frecuencia natural no amortiguada (ωn), analice esta
información y reemplácela en las otras fórmulas.
𝜔𝑛 = √63,6
4 2𝜁𝜔𝑛 =
2,3
4
Reemplace ωn en la segunda ecuación y despeje ζ.
Si ζ= 1, el sistema es críticamente amortiguado.
Si ζ> 1, el sistema es sobreamortiguado.
Si 0 < ζ < 1, el sistema es subamortiguado.
Si el segundo término del denominador (el que contiene a “s”) no está presente, indica que el sistema es
no amortiguado).

Respuesta de un sistema en el tiempo
JACG - MEVO Página 11
En el caso que se otorgue la gráfica, defina la información que podrá obtener de ella y sustitúyala
en otras fórmulas, por último, no se olvide de responder las preguntas específicas del ejercicio.
Otros conceptos presentes en los sistemas subamortiguados de segundo orden
Tiempo Peak (tiempo pico): Es el tiempo necesario para alcanzar el primer peak o máximo.
Sobreimpulso (Mp): Es la cantidad que la forma de onda sobrepasa al valor en estado estable, o final, en
el tiempo peak, expresado como porcentaje del valor en estado estable. Recuerde que este dato
generalmente se expresa como porcentaje de sobreimpulso (Mp %), pero en otras fórmulas (Factor de
amortiguamiento relativo, ζ) se debe representar como sobreimpulso en tanto por uno (Mp0 1⁄ ).
Tiempo de levantamiento (tr): Es el tiempo requerido para que la respuesta alcance por primera vez el
100% del valor final ( [-]/ωd con =arctan(ωd/ ). Sólo se aplica en los sistemas de segundo orden.
Tiempo de retardo (td): Es el tiempo requerido para que la respuesta alcance la primera vez la mitad del
valor final (0,5 * Ksp). Se aplica en los sistemas de segundo orden.
Constante de atenuación (): Como su nombre lo indica, una constante es un valor numérico, es este caso
se determina por el producto de ζ y ωn.
















![PROBLEMAS DE CALCULO DIFERENCIAL E INTEGRALfiles.calculodiferencial-g1.webnode.cl/200000063-dc4ecdd... · 2012. 12. 12. · 7. Expresar (—1,10] como una intersección de dos intervalos](https://static.fdocuments.co/doc/165x107/61432115f4b63467dd718d1b/problemas-de-calculo-diferencial-e-2012-12-12-7-expresar-a110-como-una.jpg)
