RESUMEN - Instituto Politécnico Nacional...para el motor de 500 h.p. y 0.5 1 2 λ=λ= 76 B.3...
120
IPN-SEPI-ESIME-ELÉCTRICA i RESUMEN Las máquinas rotatorias son muy utilizadas en la industria y la mayoría de estas son del tipo de motores de inducción. En los últimos años el tema de optimización de la energía eléctrica ha tomado gran importancia. Es por esto el interés por la búsqueda de un control que minimice las pérdidas de energía eléctrica en los motores de inducción. En este trabajo, se realiza el diseño del control óptimo de la velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica y limita la corriente del estator a un valor deseado. El modelo de la máquina de inducción empleado considera la saturación del material magnético y los transitorios electromagnéticos. Para resolver el problema de optimización, se utiliza el principio del máximo de Pontryagin y se emplea el criterio de optimización multicriterial en forma de una función con coeficientes de peso. Como resultado del diseño se obtiene el control óptimo en el sistema abierto en la forma implícita. Para encontrar el control óptimo en la forma explicita se resuelve el problema de doble valor en la frontera empleando el algoritmo híbrido de optimización paramétrica. Cuando se aplica el método de función con coeficientes de peso se tienen varios posibles resultados, y esto es debido a las diferentes combinaciones de los valores de los coeficientes de peso del índice de optimización escalarizado. Estas combinaciones van desde la que corresponde a la minimización solamente de las pérdidas magnéticas hasta la que corresponde a la minimización solamente de las pérdidas eléctricas. Después de haber obtenido los diferentes resultados para cada una de las combinaciones, se presenta el problema de decidir cual de ellos es el correcto y para esta selección se aplica otro criterio que son las pérdidas totales (la suma de las pérdidas eléctricas y magnéticas). Una vez seleccionada la mejor combinación, se simula (con un programa desarrollado en FORTRAN) el sistema de control óptimo diseñado para el caso del arranque en vacío de los motores elegidos de diferentes potencias.
Transcript of RESUMEN - Instituto Politécnico Nacional...para el motor de 500 h.p. y 0.5 1 2 λ=λ= 76 B.3...
IPN-SEPI-ESIME-ELÉCTRICA i
RESUMEN
Las máquinas rotatorias son muy utilizadas en la industria y la mayoría de estas son del tipo de motores de inducción. En los últimos años el tema de optimización de la energía eléctrica ha tomado gran importancia. Es por esto el interés por la búsqueda de un control que minimice las pérdidas de energía eléctrica en los motores de inducción. En este trabajo, se realiza el diseño del control óptimo de la velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica y limita la corriente del estator a un valor deseado. El modelo de la máquina de inducción empleado considera la saturación del material magnético y los transitorios electromagnéticos. Para resolver el problema de optimización, se utiliza el principio del máximo de Pontryagin y se emplea el criterio de optimización multicriterial en forma de una función con coeficientes de peso. Como resultado del diseño se obtiene el control óptimo en el sistema abierto en la forma implícita. Para encontrar el control óptimo en la forma explicita se resuelve el problema de doble valor en la frontera empleando el algoritmo híbrido de optimización paramétrica. Cuando se aplica el método de función con coeficientes de peso se tienen varios posibles resultados, y esto es debido a las diferentes combinaciones de los valores de los coeficientes de peso del índice de optimización escalarizado. Estas combinaciones van desde la que corresponde a la minimización solamente de las pérdidas magnéticas hasta la que corresponde a la minimización solamente de las pérdidas eléctricas. Después de haber obtenido los diferentes resultados para cada una de las combinaciones, se presenta el problema de decidir cual de ellos es el correcto y para esta selección se aplica otro criterio que son las pérdidas totales (la suma de las pérdidas eléctricas y magnéticas). Una vez seleccionada la mejor combinación, se simula (con un programa desarrollado en FORTRAN) el sistema de control óptimo diseñado para el caso del arranque en vacío de los motores elegidos de diferentes potencias.
IPN-SEPI-ESIME-ELÉCTRICA ii
ABSTRACT The electric machines are generally used in the industry and the majority of these motors are of the type of induction. In recent years, the subject of optimization of the electric energy has taken great importance. That is way the interest in the search for a control that minimizes the electric energy losses in the induction motors. In this work, we will design the optimal control of the induction motors speed that minimizes the electric energy losses and limits the amplitude of the stator current to a desired value. The motor model considers the saturation of the magnetic material and the electromagnetic transient. To solve the multiple objective optimization problem, the Pontryagin´s maximum principle and the method of objective weighting are used. As a result of the design the optimal control in the open loop system in the implicit form is obtained. To find the optimal control in the explicit form it is solved the double value boundary problem using the hybrid parametric optimization algorithm. When method of objective weighting is applied, several possible results they are had, and this is due to the different combinations of the values of the coefficients of weight. These combinations range from the equivalent to the magnetic losses minimization only has a which corresponds to the electric losses minimization only. After having obtained the different results for each of the combinations, presents the problem of deciding which of them is correct and to solve this problem it is applied an another criterion that are total losses (the sum of the electric and magnetic losses). Once selected the best combination of the weight coefficients, the designed optimal control system is simulated (with a program developed in FORTRAN) for optimal idle starting of the selected induction motors of different powers.

IPN-SEPI-ESIME-ELÉCTRICA iii
ÍNDICE RESUMEN i ABSTRACT ii ÍNDICE DE CONTENIDO iii ÍNDICE DE FIGURAS v ÍNDICE DE TABLAS vii SIMBOLOGÍA vii GLOSARIO DE TERMINOS x CAPITULO CONTENIDO PAG. 1 INTRODUCCIÓN 1 1.1 Introducción 1 1.2 Definición del problema 2 1.3 Objetivo de la tesis 3 1.4 Justificación 3 1.5 Estado del arte 4 1.6 Alcance 6 1.7 Aportaciones de la tesis 7 1.8 Estructura de la tesis 7 2 MODELO DEL MOTOR DE INDUCCION 8 2.1 Introducción 8 2.2 Suposiciones y consideraciones 11 2.3 Modelo del motor alimentado por una fuente de voltaje 11 2.4 Pérdidas de energía eléctrica 14 2.4.1 Pérdidas eléctricas 14 2.4.2 Pérdidas magnéticas 15 3 DISEÑO DEL CONTROL ÓPTIMO DE LA VELOCIDAD DE
MOTORES DE INDUCCIÓN QUE MINIMIZA LAS PÉRDIDAS DE ENERGÍA ELÉCTRICA
23
3.1 Introducción 23 3.2 Índice de optimización 24 3.3 Control que minimiza las pérdidas eléctricas 24 3.4 Control que minimiza las pérdidas magnéticas 27 3.5 Control que minimiza el índice 29 4 RESULTADOS DE SIMULACION 31 4.1 Introducción 31 4.2 Simulación para el motor de 3 hp 31 4.2.1 Simulación para el control con limitación de 0
1i =8[a]. 32 4.2.2 Simulación para el control con limitación de 0
1i =25[a]. 35

IPN-SEPI-ESIME-ELÉCTRICA iv
4.3 Simulación para el motor de 500hp 38 4.3.1 Simulación para el control con limitación de 0
1i =30[a]. 38 4.3.2 Simulación para el control con limitación de 0
1i =150[a]. 41 4.4 Simulación para el motor de 2250hp 44 4.4.1 Simulación para el control con limitación de 0
1i =150[a]. 45 4.4.2 Simulación para el control con limitación de 0
1i =300[a] 48 5 CONCLUSIONES 52 5.1 Conclusiones de la tesis 52 5.2 Sugerencias para trabajos futuros 53 REFERENCIAS 55 APÉNDICE CONTENIDO PAG A CONTROL ÓPTIMO. 59 A.1 Introducción al control ÓPTIMO. 59 A.2 Optimización dinámica. 59 A.3 Método del principio de máximo de Prontryagin. 63 A.3.1 caso cuando las condiciones finales son dadas
directamente (se conoce el estado final x(tr)). 63
A.3.2 caso cuando existen las restricciones para las condiciones finales (ϕ[x(tr),tr)]=0).
65
B DETERMINACIÓN DEL VALOR LÍMITE 11i DE LA
AMPLITUD DE CORRIENTE DEL ESTATOR DURANTE EL CONTROL ÓPTIMO DE VELOCIDAD DE MOTORES DE INDUCCIÓN QUE MINIMIZA SIMULTÁNEAMENTE LAS PÉRDIDAS MAGNÉTICAS Y ELÉCTRICAS.
67
B.1 Introducción. 67 B.2 Modelo del motor de inducción. 67 B.3 Minimización de las pérdidas eléctricas y magnéticas. 69 C SÍNTESIS DEL CONTROL ÓPTIMO EN TIEMPO DE
VELOCIDAD DE MOTORES DE INDUCCIÓN 79
D PROGRAMA COMPUTACIONAL EN FORTRAN 84 D.1 Programa para simular el control óptimo 84 D.2 Algoritmo híbrido de optimización paramétrica. 88 E ALGORITMO HÍBRIDO DE OPTIMIZACIÓN
PARAMÉTRICA 105
IPN-SEPI-ESIME-ELÉCTRICA v
ÍNDICE DE FIGURAS
FIGURA CONTENIDO PAG.
2.1 Efecto del acoplamiento entre los devanados del rotor y del estator en el motor trifásico.
8
2.2 Máquina equivalente de dos fases. 9 2.3 Ciclos de histéresis para diferentes valores de intensidad del
campo magnético. (b –densidad de flujo magnético medida en [t], h - intensidad del campo magnético medida en [a/m]).
17
2.4 aproximación de la curva de magnetización por la curva quebrada 19 2.5 Aresentación de la aproximación de la curva de magnetización en
las coordenadas iψ − . 19
4.1 Amplitud de la corriente del estator. 33 4.2 Frecuencia del voltaje de fase 33 4.3 Amplitud del voltaje de fase 33 4.4 Velocidad angular del rotor 33 4.5 Amplitud de la corriente del rotor 33 4.6 Amplitud del flujo de magnetización 34 4.7 Amplitud de la corriente de magnetización 34 4.8 Pérdidas eléctricas 34 4.9 Pérdidas magnéticas 34 4.10 Pérdidas totales 34 4.11 Par electromagnético 34 4.12 Par vs velocidad 36 4.13 Amplitud de la corriente del estator 36 4.14 Frecuencia del voltaje de fase 36 4.15 Amplitud de voltaje de fase 36 4.16 Velocidad angular del rotor 36 4.17 Amplitud de la corriente del rotor 36 4.18 Amplitud del flujo de magnetización 36 4.19 Amplitud de la corriente de magnetización 37 4.20 Pérdidas magnéticas 37 4.21 Pérdidas eléctricas 37 4.22 Pérdidas totales 37 4.23 Par electromagnético 37 4.24 Par vs velocidad 37 4.25 Amplitud de la corriente del estator 40 4.26 Frecuencia del voltaje de fase 40 4.27 Amplitud de voltaje de fase 40 4.28 Velocidad angular del rotor 40 4.29 Amplitud de la corriente del rotor 40 4.30 Amplitud del flujo de magnetización 40 4.31 Amplitud de la corriente de magnetización 40 4.32 Pérdidas magnéticas 40 4.33 Pérdidas eléctricas 41 4.34 Pérdidas totales 41 4.35 Par electromagnético 41 4.36 Par vs velocidad 41
IPN-SEPI-ESIME-ELÉCTRICA vi
4.37 Amplitud de la corriente del estator. 43 4.38 Frecuencia del voltaje de fase 43 4.39 Amplitud del voltaje de fase 43 4.40 Velocidad angular del rotor 43 4.41 Amplitud de la corriente del rotor 43 4.42 Amplitud del flujo de magnetización 43 4.43 Amplitud de la corriente de magnetización 43 4.44 Pérdidas eléctricas 43 4.45 Pérdidas magnéticas 44 4.46 Pérdidas totales 44 4.47 Par electromagnético 44 4.48 Par vs velocidad 44 4.49 Amplitud de la corriente del estator. 46 4.50 Frecuencia del voltaje de fase 46 4.51 Amplitud del voltaje de fase 46 4.52 Velocidad angular del rotor 46 4.53 Amplitud de la corriente del rotor 46 4.54 Amplitud del flujo de magnetización 46 4.55 Amplitud de la corriente de magnetización 47 4.56 Pérdidas eléctricas 47 4.57 Pérdidas magnéticas 47 4.58 Pérdidas totales 47 4.59 Par electromagnético 47 4.60 Par vs velocidad 47 4.61 Amplitud de la corriente del estator. 49 4.62 Frecuencia del voltaje de fase 49 4.63 Amplitud del voltaje de fase 49 4.64 Velocidad angular del rotor 49 4.65 Amplitud de la corriente del rotor 49 4.66 Amplitud del flujo de magnetización 49 4.67 Amplitud de la corriente de magnetización 50 4.68 Pérdidas eléctricas 50 4.69 Pérdidas magnéticas 50 4.70 Pérdidas totales 50 4.71 Par electromagnético 50 4.72 Par vs velocidad 50 A.1 Control óptimo en el sistema abierto 60 A.2 Control óptimo en el sistema cerrado. 62 B.1 Variaciones del valor de 11i en función de la velocidad relativa ν
para el motor de 3h.p. y 5.021 == λλ 75
B.2 Variaciones del valor de 11i en función de la velocidad relativa ν para el motor de 500 h.p. y 5.021 == λλ
76
B.3 Variaciones del valor de 11i en función de la velocidad relativa ν para el motor de 2250 h.p. y 5.021 == λλ
77
E.1a Diagrama de flujo del algoritmo híbrido de optimización paramétrica.
107
E.1b Diagrama de flujo del algoritmo híbrido de optimización paramétrica (continuación).
108

IPN-SEPI-ESIME-ELÉCTRICA vii
( 1.628 )24
cz
m
d d lA
γρ+
=
z = B 200 επ
, ,1 2 1 2
, 21 o 2 o o o oF = ( + )( + ) - X X X X X XX X X X X = + +
2 2,1 22 , , ,
1 o o 2 o 1 1 o 2 2 o 1 R R = - ( + )( + ) + + ( + ) + ( + ) F X X X X X R X X R X X
ααβ β
⎧ ⎫ ⎡ ⎤⎡ ⎤⎨ ⎬ ⎢ ⎥⎣ ⎦
⎩ ⎭ ⎣ ⎦
ÍNDICE DE TABLAS
TABLA CONTENIDO PAG
4.1 Datos numéricos de las variables de interés 324.2 Datos numéricos de las variables de interés 354.3 Datos numéricos de las variables de interés 394.4 Datos numéricos de las variables de interés. 424.5 Datos numéricos de las variables de interés. 454.6 Datos numéricos de las variables de interés 48
SIMBOLOGÍA B inducción magnética. Bm inducción magnética máxima en [T]. d grosor de la lámina del núcleo magnético del motor
medido en (m). f frecuencia de la corriente medida en (Hz).
)(),(),( ooqod fff ψψψ funciones de las componentes y de la amplitud del flujo de magnetización utilizadas para definir la influencia de la saturación del hierro en los flujos magnéticos concatenados con los devanados del motor.
H Hamiltoniano. ia corriente de una fase del motor trifásico.
bi valor nominal de la amplitud de la corriente del estator con la carga nula.
max11min11 , ii valores mínimo y máximo del valor límite de la amplitud de la corriente del estator.
mi1 valor máximo de la amplitud de la corriente del estator obtenido durante el control de velocidad del motor de inducción.
IPN-SEPI-ESIME-ELÉCTRICA viii
01i valor admisible de la amplitud de la corriente de una fase del
estator del motor. omi valor máximo de la amplitud de la corriente de
magnetización obtenido durante el control de velocidad del motor de inducción.
i1opt valor óptimo de la amplitud de la corriente de una fase del estator del motor.
i1opts valor óptimo de la amplitud de una fase de la corriente de estator del motor sin tomar en consideración la limitación de dicha amplitud.
od oq
, i i componentes de la corriente de magnetización en las coordenadas d-q.
' '1 1 2 2, ,d q d qi i , i i componentes de la corriente del estator y del rotor referido
al circuito del estator en las coordenadas d,q, respectivamente.
J momento de inercia del rotor. M e par electromagnético desarrollado por el motor con p-
pares de polos. M o par de la carga para el motor con p-pares de polos. M m masa del núcleo magnético del motor. M r masa del núcleo magnético del rotor. M s masa del núcleo magnético del estator. p número de pares de polos. Pg pérdidas de potencia provocadas por la corriente giratoria. Ph pérdidas de potencia provocadas por histéresis. Pm pérdidas magnéticas de potencia en el material magnético. Pmt pérdidas magnéticas totales de potencia en el núcleo
magnético del estator y del rotor del motor. Q índice de optimización vectorial (cuando se minimizan
simultáneamente más que un índice de optimización escalar).
Q1 índice de optimización cuando se minimiza el tiempo de control ( t=Q r1 ).
Q2 índice de optimización cuando se minimizan las pérdidas de energía eléctrica en los devanados del estator y del rotor del motor.
Q1o valor del índiceQ1 obtenido minimizando solamente el tiempo de control.
Q2o valor del índiceQ2 obtenido minimizando solamente las pérdidas de energía eléctrica en los devanados del estator y del rotor
Q2m pérdidas de energía eléctrica en el núcleo magnético del motor.

IPN-SEPI-ESIME-ELÉCTRICA ix
iQ
ioQ
tQ2 las pérdidas totales de energía eléctrica (en el cobre y en el hierro).
el índice de optimización escalar del número “i” (i=1,2,...,k donde k es el número total de los índices escalares de optimización).
el valor del criterio escalarQi obtenido haciendo la optimización solamente desde el punto de vista de este criterio escalar.
R ,R ,
21 resistencias de los devanados de una fase del estator y del rotor referido al circuito del estator, respectivamente
t tiempo. tr tiempo de observación (por ejemplo: de arranque, de
control etc.). ua voltaje de una fase del motor trifásico. um valor nominal de la amplitud del voltaje de fase del
estator. u ,u 1q1d las componentes del voltaje del estator del motor de doble
fase equivalente. U el valor eficaz del voltaje de fase del estator. U n el valor eficaz nominal del voltaje de fase del estator.
1 2 3, , ,V V V V variables conjugadas. '
1 2,X X reactancias, a la frecuencia nominal de la corriente de estator, de dispersión de los devanados del estator y del rotor referido al circuito de estator, respectivamente.
0X la reactancia de magnetización del motor de doble fase equivalente a la frecuencia nominal de la corriente del estator.
n
ωαω
= valor relativo de la frecuencia angular de la corriente del
estator. - r
n
ω ωβω
= deslizamiento relativo (para el trabajo del motor como
generador 0<β y como freno 1>β ). ε la constante del valor dependiente del tipo de lámina (para
la lámina de transformadores que contiene 4% de silicio ]kg H / m4[ 2.0 - 1.2 = ε ).
UU =
uu =
nm
γ el voltaje relativo de una fase del estator.
γ c la conductividad específica de la lámina medida en simens por metro [S/m].
IPN-SEPI-ESIME-ELÉCTRICA x
λ i el coeficiente de peso del criterio escalarQi en el criterio vectorial de optimizaciónQ ”escalarizado” (presentado como la combinación lineal de sus componentes.
ωων
n
r = la velocidad relativa de la flecha del motor.
ω la frecuencia angular de la corriente del estator. ω k la velocidad angular con la cual gira el sistema de
coordenadas d-q respecto al estator. nω la frecuencia angular nominal de la corriente del estator.
ω r la velocidad angular de la flecha del motor con un par de
polos (la velocidad angular del motor con p pares de polos: /p = r
,r ωω ).
ωωω r, - = la frecuencia angular de la corriente en el rotor.
ψψψψ ,2q
,2d1q1d , , , componentes de los enlaces de flujos magnéticos con los
devanados del estator y del rotor referido al circuito del estator en las coordenadas d-q, respectivamente.
ψψ oqod , las componentes del flujo de magnetización en las coordenadas d-q.
ψ o la amplitud del flujo de magnetización.
maxoψ la amplitud máxima de flujo de magnetización para la cual el motor opera todavía en la parte lineal de su curva de magnetización.
mρ la densidad específica del material magnético. ξ ángulo entre el vector de la corriente del estator y el eje
“d” de las coordenadas d-q que giran con la velocidad del rotor (están acopladas al rotor).
GLOSARIO DE TÉRMINOS
CC Corriente continua. CA Corriente alterna.

IPN-SEPI-ESIME-ELÉCTRICA 1
CAPITULO 1
INTRODUCCIÓN 1.1 Introducción La máquina de inducción es robusta y una de las más utilizadas en la industria. Los motores de inducción monofásicos son usados en muchas aplicaciones residenciales, como por ejemplo lavadoras, cortadores de césped, extractores de jugo y refrigeradores, entre otros. La versión lineal de la máquina de inducción fue desarrollada primordialmente para ser usada en sistemas de transportación (trenes). La máquina de inducción es indudablemente una máquina eléctrica muy útil. Los motores de inducción trifásicos son uno de los más importantes en la industria en general [1]. Como se menciono anteriormente, existen muchos procesos industriales, elevadores, grúas, entre otras aplicaciones, en las que las máquinas utilizadas son empleadas para cargas no continuas, es decir, que dichos motores son operados poco tiempo, pero son puestos en operación varias veces al día. En pocas palabras, podemos decir que el tiempo de operación es casi el mismo comparado con las veces que se pone en servicio la máquina. Recordando que los motores demandan mayor energía durante el arranque que durante la operación en estado estacionario. De aquí que para reducir esos excesos de corriente durante el estado transitorio de puesta en servicio se emplean diferentes métodos de arranque a tensión reducida. Se considera que las pérdidas de energía eléctrica durante el arranque son de gran proporción en sistemas en los que las máquinas son de operación no continua pero de muchos arranques al día. Anteriormente, la fuente de alimentación suministrada a las máquinas de corriente alterna era senoidal y con frecuencia constante, por lo tanto la velocidad del motor de inducción era difícil controlarla, por esto dicho motor se utilizaba solo en aplicaciones donde se requería velocidad constante. Mientras que la máquina de Corriente Continua (C.C.), era preferida por la facilidad de variar su velocidad. Las máquinas de C.C. tienen la desventaja de alto costo, alto par de inercia y problemas de mantenimiento con escobillas y conmutador. Las máquinas de inducción no tienen las desventajas de las máquinas de C.C. mencionadas anteriormente [2]. Esta situación ha cambiado con la llegada de los semiconductores. La aplicación de los transistores y tiristores permiten tener fuentes de alimentación de voltaje o corriente variable, así como de frecuencia variable, muy prácticas y económicas. Este tipo de fuentes, llamadas convertidores de frecuencia estáticos [2], permiten controlar la velocidad del motor de inducción mediante la variación de la frecuencia y la amplitud del voltaje o de la corriente de alimentación. Debido a esto la máquina de inducción ha llegado a invadir áreas de aplicación en las cuales el motor de C.C. había sido utilizado exclusivamente [3]. En la manera más general se puede decir que las pérdidas en las máquinas eléctricas se dividen en tres: pérdidas en el hierro, pérdidas en el cobre y las pérdidas mecánicas. Si la máquina trabaja a una velocidad dada, las pérdidas mecánicas son constantes por que están relacionadas directamente con la velocidad del rotor. Por lo tanto, la eficiencia de
IPN-SEPI-ESIME-ELÉCTRICA 2
la máquina depende solamente de las pérdidas en el hierro y las pérdidas en el cobre [51]. En la actualidad el uso apropiado de la energía eléctrica es muy importante desde el punto de vista del ahorro de energía eléctrica. Por lo que es necesario desarrollar máquinas más eficientes. Sin embargo se puede diseñar controles que minimicen las pérdidas de energía eléctrica durante la operación del motor, durante el tiempo de control de la velocidad del motor o durante el tiempo de arranque. Esto es un problema de optimización. El problema de optimización consiste en la selección de las variables de control de un sistema, tales que maximizan o minimizan a un índice de optimización, dentro de limitaciones (rangos admisibles de los cambios) y dentro de los enlaces (las ecuaciones que describen el objeto de control) puestos sobre las variables de control que frecuentemente no son las variables independientes. Para poder resolver el problema de diseño del control óptimo de la velocidad de los motores de inducción que minimice las pérdidas de energía eléctrica, se necesita elegir un modelo matemático del motor de inducción (ver capitulo 2) y un método matemático de optimización como, por ejemplo, el método de principio de máximo de Pontryagin (ver apéndice A). Generalmente con cargas ligeras, las pérdidas en el hierro se incrementan drásticamente, reduciendo considerablemente la eficiencia. Para mejorar la eficiencia del motor, se necesita reducir el flujo, obteniendo así un balance entre las pérdidas en el hierro y en el cobre [42]. Generalmente existen dos métodos diferentes para evaluar la eficiencia de los motores de inducción, el primero es el método basado en la medición de la potencia [47, 48, 49, 50] y el segundo el método basado en el modelo de pérdidas [44, 45, 7, 46]. 1.2 Definición del problema En el diseño del control óptimo de la velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica y limita la amplitud de la corriente de alimentación, se pueden utilizar diferentes modelos del motor de inducción (el modelo más exacto que considera los transitorios electromagnéticos y la saturación del hierro o el modelo simple que no considera estos fenómenos), sin embargo si el modelo es simple, más sencillo es el diseño del control óptimo y el tiempo de cómputo se reduce. Además la utilización del modelo simple permite diseñar el controlador óptimo de la velocidad del motor de inducción (el sistema cerrado de control) mientras que basándose en el modelo que considera los transitorios electromagnéticos y la saturación del hierro se puede sintetizar solamente el control en el sistema abierto [14]. La factibilidad de los controladores diseñados sobre la base del modelo simple es bastante baja, sobre todo desde el punto de vista de la limitación de la amplitud de la corriente de alimentación. Por esto se debe utilizar en el diseño de control óptimo, el modelo que toma en cuenta los transitorios electromagnéticos y la saturación del hierro. El control óptimo encontrado está en el sistema abierto, y este determina como deben de cambiar las variables de control en función al tiempo para que minimicen el índice de optimización, además limita la amplitud de la corriente del estator a un valor deseado.

IPN-SEPI-ESIME-ELÉCTRICA 3
El valor límite de la amplitud de la corriente de alimentación aceptado durante el diseño de control óptimo es un factor determinante acerca de que si puede o no suceder la saturación del material magnético durante el control. Por lo tanto en el diseño se consideran dos valores de limitación, uno que asegura que no ocurra la saturación y otro que no asegura que no ocurra la saturación. Las variables a controlar son 1( )i t - la amplitud de la corriente del estator y ( )tξ el ángulo entre el vector de la corriente del estator y el eje “d” de las coordenadas d-q que giran con la velocidad del rotor (están acopladas al rotor). Para encontrar el control óptimo de la velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica se aceptan las siguientes consideraciones:
• Se utiliza el modelo del motor que considera los transitorios electromagnéticos y la saturación del material magnético y la fuente de alimentación es un convertidor de frecuencia de corriente.
• Se resuelve el problema de optimización utilizando el Principio del Máximo de Pontryagin (apéndice A), obteniendo el control óptimo en la forma implícita.
• Se aplica el algoritmo de optimización paramétrica [34] para resolver el problema de doble valor a la frontera y encontrar el control óptimo en la forma explicita.
• Se realizan simulaciones para tres motores de diferente capacidad.
1.3 Objetivo de la tesis
Diseñar un control óptimo de la velocidad de los motores de inducción el cual minimice las pérdidas de energía eléctrica y limita la amplitud de la corriente de alimentación a un valor deseado. Primero se diseñará un control óptimo de la velocidad que minimice las pérdidas en el cobre, después un control óptimo de la velocidad que minimicé las pérdidas en el núcleo magnético y finalmente se diseña el control óptimo de la velocidad que minimiza las pérdidas eléctricas totales.
Comparar los controles óptimos:
En tiempo, Que minimiza las pérdidas en el cobre. Que minimiza las pérdidas en el hierro Que minimiza las pérdidas totales (en el cobre y en el hierro)
1.4 Justificación Debido a los altos costos de la energía eléctrica, la minimización de las pérdidas de energía es importante para reducir el costo de operación y costo del suministro. Esta es la razón por la cual el problema de minimizar las pérdidas eléctricas totales de los motores de inducción, por lo cual se establecen estrategias para la minimización de las pérdidas eléctricas totales desde un punto de vista analítico y tal vez en un trabajo futuro implementarlo.
IPN-SEPI-ESIME-ELÉCTRICA 4
En las industrias el mayor consumo de energía eléctrica es debido a los motores. Las máquinas eléctricas más empleadas en la industria son los motores de inducción. En los últimos años se han desarrollado diferentes controladores de la velocidad de los motores de inducción, pero muy pocos consideran minimizar las pérdidas de energía eléctrica. El uso apropiado de la energía eléctrica es muy importante y para resolver este problema se diseñan máquinas eléctricas de alta eficiencia. Sin embargo se pueden diseñar controladores que minimicen las pérdidas de energía eléctrica en los motores de inducción. Existen aplicaciones en que las máquinas son puestas en operación varias veces al día, un ejemplo de esto son los elevadores. En estos arranques, la corriente demandada por el motor es mayor que durante el estado estacionario de operación y si evaluamos el número de veces que se demanda esta corriente se puede encontrar que son grandes pérdidas económicas. Y también la fuente de alimentación debe ser capaz de suministrar estos exceso de corriente demandadas por el motor, en el pasado y aun en la actualidad este problema se resuelve aplicando arrancadores a tensión reducida. Es por esto que este trabajo esta encaminado al diseño del control óptimo de la velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica y que limita la corriente del estator a un valor deseado. Además forma parte del proyecto de investigación con clave de registro de la SIP 20070237. 1.5 Estado de arte Diferentes esquemas para la optimización de los motores de inducción para el método de campo orientado son desarrollados para ambos estados de operación (estacionario y dinámico), en diferentes artículos. Por lo general, los diferentes autores realizan la optimización ajustando el nivel del flujo del rotor de la máquina de inducción para un valor óptimo como función de las condiciones de operación. En el caso de operación en el estado estacionario, la referencia del flujo del rotor es dada como una expresión analítica simple del par y la velocidad del motor. Pero en el caso de la operación en el estado dinámico, la referencia del flujo del rotor es obtenido usando el método de programación dinámica [35]. E. Mendes, A. Baba y A. Razek proponen un nuevo método basado en la optimización del estado estacionario referenciado al flujo del rotor y después extenderlo a la operación dinámica [35]. Por otro lado H. A. Al Rashisi, A. Gastli y A. Al Bad, proponen un esquema nuevo basado en redes neuronales tomando las ventajas de la teoría de Nola que asegura el punto de operación del par y velocidad y que solo existe un nivel de amplitud de voltaje y frecuencia en que la máquina opera óptimamente [36]. Se sabe que la eficiencia de los motores de inducción bajo carga parcial puede ser mejorada manipulando el campo. Entre los numerosos esquemas propuestos que minimizan las pérdidas, el esquema que usa el factor de potencia del motor como la principal variables de control tiene la ventaja de alta sensibilidad y fácil
IPN-SEPI-ESIME-ELÉCTRICA 5
implementación. Pero el problema de cómo puede ser generado el factor de potencia óptimo no esta documentado. Sheng Ming Yang y FENA Chieh Lin proponen un esquema que usa el control del factor de potencia con la medición automática de las pérdidas mínimas y el factor de potencia [37]. Abdelhakim Haddoun, Mohamed El Hachemi Benbouzid, Demba Diallo, Rachhid Abdessemed, Jamel Ghouili y Kamel Srairi proponen una estrategia que minimiza las pérdidas de un motor de inducción. La estrategia de control propuesta, es basada en el control directo del par y del flujo, utiliza el flujo del estator como variable de control y el nivel del flujo es seleccionado de acuerdo con el par demandado [38]. Bagdad Pryymak, Juan M. Moreno Eguilaz, Juan Peracaula enfocan su estudio a la minimización de las pérdidas de los motores de inducción. En muchas aplicaciones los motores de inducción trabajan dentro del par nominal durante todo el tiempo. En estas circunstancias la eficiencia del motor de inducción puede ser mejorada reduciendo el flujo. Para un par dado, las pérdidas en el hierro decrecen y se incrementan las pérdidas en el cobre. Con un apropiado algoritmo un punto óptimo del flujo puede ser encontrado para minimizar la potencia de pérdidas totales del motor de inducción. Utilizando el modelo del motor de inducción, una red neuronal aproximada es usada para mejorar la eficiencia en un control vectorial. Un modelo de pérdidas complejo del motor de inducción, incluyendo desviaciones magnéticas y térmicas de sus parámetros, es usado para estimar las pérdidas. Basado en este modelo, la red neuronal es adecuada para estimar el flujo del rotor óptimo [39]. Los motores de inducción trabajando con cargas bajas, las pérdidas en el hierro se incrementan drásticamente, reduciendo considerablemente la eficiencia [40, 41]. Para mejorar la eficiencia del motor, J. Moreno Eguilaz, Miguel Cipolla, Juan Peracaula y Paulo J. da Costa Branco [9] proponen 2 diferentes aproximaciones: la primera es utilizar un modelo de pérdidas aproximado y el segundo realizar una medición de potencia aproximada. Amjad Baba, Eduardo Mendes y Adel Razek en [11] realizan la minimización de las pérdidas en el motor de inducción optimizando el nivel del flujo como función del par del motor considerando la saturación magnética. En [42], un nuevo algoritmo de control que minimiza el tiempo y las pérdidas para motores de inducción usando un sistema hibrido (algorithm-Particle Swarm Optimization) es propuesto para obtener un alta eficiencia del motor. S. Lim y K. Nam explican que la minimización de las pérdidas en los motores de inducción esta directamente relacionada en la selección del nivel del flujo. Los niveles altos del flujo, agrandan las pérdidas en el hierro. Pero una minimización extrema causa que las pérdidas en el cobre se incrementen. Existe un nivel de flujo óptimo, que garantiza la minimización de las pérdidas y para encontrarlo, estos autores desarrollaron un algoritmo de minimización de pérdidas presentado en [43]. Los diferentes modelos de pérdidas para la minimización de las pérdidas pueden ser encontrados en la literatura [44, 45, 46, 47]. Kioskeridis y Margaris [7] calcularon las pérdidas totales en el hierro y las pérdidas en el cobre y calcularon un nivel flujo óptimo que minimice las pérdidas totales.
IPN-SEPI-ESIME-ELÉCTRICA 6
García [45], después obtiene un modelo de pérdidas simplificado del circuito equivalente del motor de inducción para eliminar los enlaces en las inductancias en las coordenadas d-q. El modelo de pérdidas consiste de resistencias que reflejan las pérdidas en el hierro, las pérdidas en el cobre del estator y rotor están en función de la corriente del estator en el marco de referencia d-q. Basado en el modelo de pérdidas, un nivel de corriente en el eje d es calculado, el cual minimiza las pérdidas totales. Lorenz y Yang [44] toman en consideración las pérdidas en el cobre y en el hierro para ormular el modelo de pérdidas. Usando una función objetivo, calculan la trayectoria del flujo óptimo para el control vectorial. En el artículo [54] Kirschen, Novotny y Lipo, presentan un método práctico para lograr eficacia óptima del control de velocidad de los motores de inducción. Este método es basado en el ajuste adaptable del nivel de flujo, utilizando un controlador de campo orientado y una medición directa de potencia de entrada del sistema del control. Mannan, Murata y Tamura en su trabajo [55], presentan el diseño de controlador óptimo de velocidad de motor de inducción que minimiza las pérdidas eléctricas y magnéticas (optimiza la eficiencia de control). Para lograr esto los autores utilizan el modelo del motor de inducción linealizado con el campo orientado (despreciando la saturación del material magnético) y aplican la teoría de diseño del controlador óptimo de estado con el índice cuadrático de optimización. En la SEPI-ESIME ZACATENCO se han escrito trabajos afines como son: “Control de velocidad de un motor de inducción aplicando el mapa auto-organizable de Kohonen”, del M. en C. Gabriel Mendoza Figueroa, “Simulación digital de control vectorial de velocidad de un motor de inducción”, del Dr. Pedro Ponce Cruz, “Factibilidad de controladores de velocidad de motores de inducción subóptimos en tiempo”, del M. en C. Miguel Angel Tecualt Nava, “Control en lazo abierto de la velocidad de un motor de inducción utilizando pwm con vectores espaciales”, del M. en C. Manuel García López, "Simulación del control de velocidad por campo orientado de un motor de inducción utilizando un estaimador de velocidad basado en observadores de flujo", del M. en C. Marla Erika Ramírez Sánchez, “Estudio de control óptimo de motores de inducción con alimentación no senoidal”, del M. en C. Lázaro Eduardo Castillo Barrera, “Control de motores de inducción utilizando la función de estructura multivariable”, del M. en C. Ernesto Carlos Ugalde Loo, “Método termométrico para determinación de pérdidas electromagnéticas en motores”, del M. en C. David de Jesús Yudiche Barbosa, “Autosintonización por búsqueda tabú del control vectorial difuso de velocidad para un motor de inducción”, del M. en C. Juan José Muñoz Cesar , “Estudio del control óptimo de motores de inducción con la saturación del material magnético”, del M. en C. Karla Idania Aguirre Molar. 1.6 Alcance Con los resultados de esta tesis se contribuye a dar a conocer una forma en que se puede minimizar las pérdidas de energía eléctrica de los motores de inducción durante el tiempo de control (tiempo de arranque). También permite saber una manera de limitar la corriente del estator a un valor deseado para que no ocurra la saturación.

IPN-SEPI-ESIME-ELÉCTRICA 7
1.7 Aportaciones de la tesis Las aportaciones de este trabajo son las siguientes: Se emplea el método de escalarización por coeficientes de peso para resolver el problema de optimización vectorial. Se encuentra el control óptimo en lazo abierto en la forma implícita que minimiza las pérdidas magnéticas, eléctricas y totales utilizando el modelo del motor de inducción alimentado por una fuente de corriente y que toma en consideración la saturación del material magnético Se resuelve el problema de doble valor en la frontera para encontrar el control óptimo en lazo abierto en la forma explicita utilizando el algoritmo híbrido de optimización paramétrica descrito en el apéndice E, para cada una de las diferentes combinaciones de los valores de los coeficientes de peso Para la selección del mejor resultado se aplica el criterio de la suma de las pérdidas magnéticas y eléctricas. Se aplica el control encontrado a tres motores de diferente capacidad para analizarlo y evaluar su comportamiento. Para realizar esto se realizó un código en el lenguaje de programación Fortran 90, para simular el control óptimo encontrado, aplicándolo al arranque del motor de inducción en vacío. 1.8 Estructura de la tesis El capitulo 1 presenta el planteamiento del problema, se menciona el objetivo que se busca al realizar esta investigación y la justificación del trabajo. Se presenta el estado de arte referente al tema de investigación. En el Capitulo 2 se realiza una breve explicación del contexto histórico del modelo de la máquina de inducción y finalmente se presenta el modelo utilizado para el diseño del control óptimo de la velocidad que minimiza las pérdidas de energía eléctrica. En el Capitulo 3 se realiza primero el diseño del control óptimo de velocidad de los motores de inducción que minimiza las pérdidas en el cobre, después el control óptimo de velocidad de los motores de inducción que minimiza las pérdidas en el hierro y finalmente el control óptimo de velocidad de los motores de inducción que minimiza las pérdidas eléctricas totales. Este problema de optimización es resuelto utilizando el Principio del Máximo de Pontryagin. En el Capitulo 4 se presentan los resultados de las simulaciones realizadas para tres motores de inducción de diferentes capacidades (3hp, 500hp y 2250hp), para cada motor se muestran dos resultados diferentes: uno con una limitación de la corriente del estator que asegura que no ocurra la saturación magnética y otro que no asegura que ocurra la saturación del material magnético. En el Capitulo 5 se presentan las conclusiones, observaciones, así como sugerencias para futuros trabajos.
IPN-SEPI-ESIME-ELÉCTRICA 8
CAPITULO 2
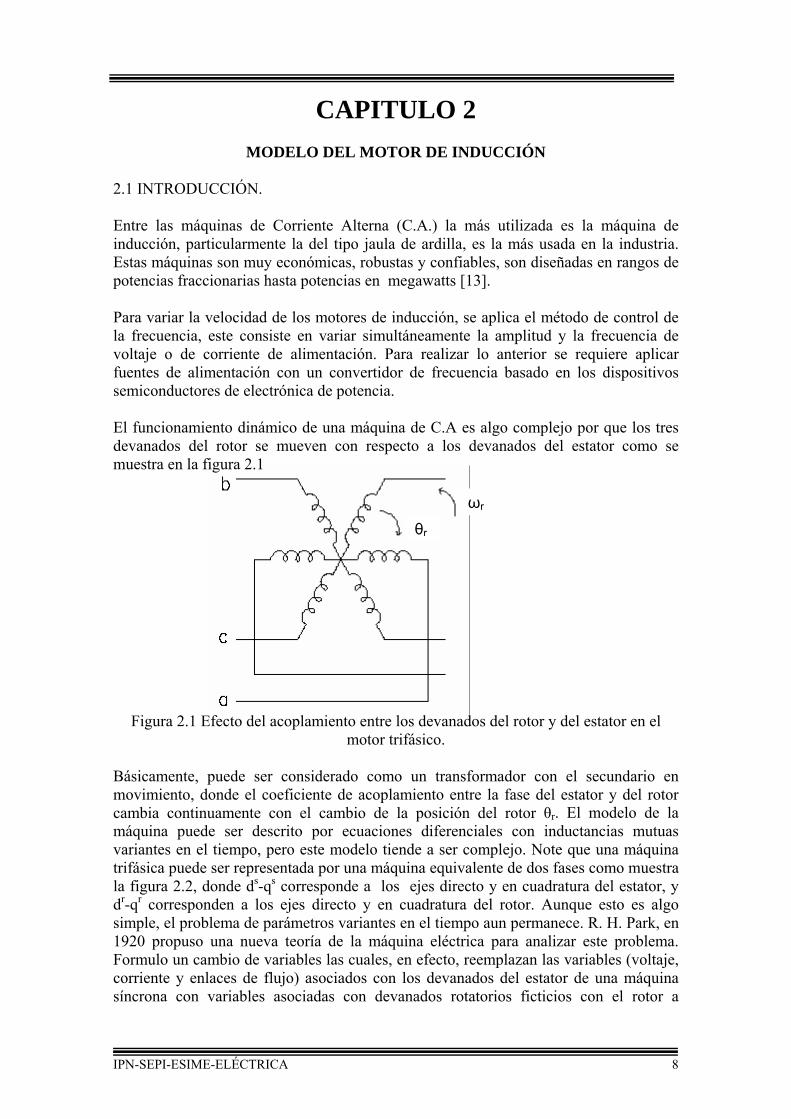
MODELO DEL MOTOR DE INDUCCIÓN 2.1 INTRODUCCIÓN. Entre las máquinas de Corriente Alterna (C.A.) la más utilizada es la máquina de inducción, particularmente la del tipo jaula de ardilla, es la más usada en la industria. Estas máquinas son muy económicas, robustas y confiables, son diseñadas en rangos de potencias fraccionarias hasta potencias en megawatts [13]. Para variar la velocidad de los motores de inducción, se aplica el método de control de la frecuencia, este consiste en variar simultáneamente la amplitud y la frecuencia de voltaje o de corriente de alimentación. Para realizar lo anterior se requiere aplicar fuentes de alimentación con un convertidor de frecuencia basado en los dispositivos semiconductores de electrónica de potencia. El funcionamiento dinámico de una máquina de C.A es algo complejo por que los tres devanados del rotor se mueven con respecto a los devanados del estator como se muestra en la figura 2.1
Figura 2.1 Efecto del acoplamiento entre los devanados del rotor y del estator en el motor trifásico.
Básicamente, puede ser considerado como un transformador con el secundario en movimiento, donde el coeficiente de acoplamiento entre la fase del estator y del rotor cambia continuamente con el cambio de la posición del rotor θr. El modelo de la máquina puede ser descrito por ecuaciones diferenciales con inductancias mutuas variantes en el tiempo, pero este modelo tiende a ser complejo. Note que una máquina trifásica puede ser representada por una máquina equivalente de dos fases como muestra la figura 2.2, donde ds-qs corresponde a los ejes directo y en cuadratura del estator, y dr-qr corresponden a los ejes directo y en cuadratura del rotor. Aunque esto es algo simple, el problema de parámetros variantes en el tiempo aun permanece. R. H. Park, en 1920 propuso una nueva teoría de la máquina eléctrica para analizar este problema. Formulo un cambio de variables las cuales, en efecto, reemplazan las variables (voltaje, corriente y enlaces de flujo) asociados con los devanados del estator de una máquina síncrona con variables asociadas con devanados rotatorios ficticios con el rotor a
θr
ωr

IPN-SEPI-ESIME-ELÉCTRICA 9
velocidad síncrona. Esencialmente, transformó, las variables del estator a un marco de referencia giratorio síncrono fijo en el rotor. Con esta transformación (llamada transformación de Park), muestra que todas las inductancias variables en el tiempo que ocurren debido al circuito eléctrico en movimiento relativo y los circuitos eléctricos con reluctancias magnéticas variantes pueden ser eliminadas. Después en 1930, H. C. Stanley muestra que las inductancias variantes en el tiempo en las ecuaciones de voltaje de una máquina de inducción debido a los circuitos eléctricos en movimiento relativo pueden ser eliminadas por la transformación de variables del rotor a variables asociadas con devanados estacionarios ficticios. En este caso, las variables del rotor son transformadas a un marco de referencia estacionario fijo en el estator. G. Kron propone una transformación de ambas variables del estator y rotor a un marco de referencia rotatorio síncrono que se mueve con el campo magnético rotatorio. D. S. Brereton propone una transformación de las variables del estator a un marco de referencia rotatorio que esta fijo al rotor [2].
Figura 2.2 Máquina equivalente de dos fases.
Los marcos de referencia más utilizados en el análisis de máquinas de C.A. son [5]:
• Marco de referencia arbitrario donde ωk=ω. • Marco de referencia estacionario (fijo en el estator) donde ωk=0. • Marco de referencia fijo en el rotor donde ωk=ωr • Marco de referencia que gira a la velocidad síncrona donde ωk=ωe.
donde: ωk Frecuencia angular del sistema de coordenadas d-q. ωr Velocidad angular del rotor. ωe Velocidad angular eléctrica del campo magnético giratorio en el entrehierro,
estabilizado por la corriente del estator a la frecuencia fundamental. ω Velocidad angular de la corriente del estator. El modelo expresado en las coordenadas que giran con la velocidad del rotor (transformación de Park para la máquina asíncrona), tiene las ecuaciones de equilibrio electromagnético relativamente simples. La solución digital de estas ecuaciones (en forma
qr
qs
dr
ds
θr
ωr

IPN-SEPI-ESIME-ELÉCTRICA 10
de las variaciones en el tiempo de las amplitudes de las variables de interés) normalmente se puede obtener con el paso de integración más grande que en el caso de los modelos expresados en otras coordenadas, en consecuencia, el tiempo de la solución es más corto [1]. Desde el punto de vista de la complejidad de los cálculos durante la solución del problema de optimización, es conveniente escoger un modelo matemático del motor posiblemente simple, es decir, con el número de las ecuaciones posiblemente pequeño. Partiendo de esta observación, el modelo más adecuado para buscar el control óptimo es el que utiliza la alimentación por el convertidor de corriente, debido a que este modelo es de orden menor al que se tiene en el modelo alimentado por una fuente de voltaje. En este caso la variable de control es la corriente del estator lo que facilita mucho el diseño del control óptimo ya que la limitación del control está dada para la amplitud de la corriente del estator . Por las razones mencionadas arriba y tomando en consideración que la solución del problema de optimización requiere la repetición muchas veces a la solución de las ecuaciones del equilibrio electromagnético y mecánico del modelo matemático del motor, se escoge el modelo con la alimentación por la corriente expresado en las coordenadas que giran con la velocidad del rotor. En dicho modelo la alimentación por la corriente tiene la forma siguiente:
(2.1) entonces el control en el sistema abierto de la velocidad del motor, obtenido con base en este modelo del motor, tiene la forma:
(2.2) Obviamente para el motor real la descripción del control debe ser expresada en las coordenadas inmóviles (acopladas al estator) o, en otras palabras, hay que saber cómo variar en el tiempo la amplitud y la frecuencia de la corriente o del voltaje de alimentación. Conociendo el ángulo )(tξ entre el vector de la corriente del rotor y el vector de la corriente del estator, se puede determinar fácilmente el deslizamiento absoluto )(' tβ y el deslizamiento relativo (por unidad) )(tβ :
(2.3)
(2.4) Entonces la frecuencia de la corriente o del voltaje de alimentación, se puede calcular de la fórmula siguiente:
(2.5)
dttdt )()(' ξβ =
n
ttωββ )()(
'
=
dttdtt r)()()( ξωω +=
1 1( )= ( t )i i t
ξ ξ ⎫⎬= ⎭
1 1
1 1
cos ( )sin ( )
d
q
i = i ti = i t
ξξ
⎫⎬⎭

IPN-SEPI-ESIME-ELÉCTRICA 11
2.2 Suposiciones y Consideraciones El modelo matemático del motor de inducción utilizado en este trabajo para encontrar la descripción matemática del control óptimo de velocidad de los motores de inducción que minimiza las pérdidas de energía eléctrica, se basa en las siguientes suposiciones:
1. La fuente de alimentación es simétrica y senoidal. 2. El motor de inducción es simétrico con el rotor liso (de jaula de ardilla) y con
los devanados del rotor y del estator conectados en estrella sin el conductor de neutro.
3. Las resistencias y las inductancias son constantes. En el modelo se consideran los transitorios electromagnéticos y la saturación del material magnético. 2.3 Modelo del motor alimentado por una fuente de corriente. Bajo las suposiciones descritas en subcapítulo 2.2, el modelo matemático del motor de inducción de doble fase equivalente con el rotor cortocircuitado, que toma en consideración los transitorios electromagnéticos y la saturación del hierro, está alimentado por la fuente de corriente y expresado en las coordenadas d-q que giran con la velocidad angular del rotor rω , se puede describir por las fórmulas siguientes [5, 15, 16, 17]:
' ' ' '
'2 2 2 21 2' ' '
2 2 2
cos ( )d o n nd od
o o o
d R X R Ri f
dt X X X X X Xψ ω ω
ξ ψ ψ= − −+ + +
' ' ' '2 '2 2 2
1 2' ' '2 2 2
sin ( )q o n nq oq
o o o
d R X R Ri f
dt X X X X X X
ψ ω ωξ ψ ψ= − −
+ + +
' '22 2'1
2' ' '2 2 2
sin ( )32 ( ) cos ( )
d d odn oro
no q q oq
fp Xd Fi pX M
dt JJF X X f
ψ ξ ψ ψωωω ψ ξ ψ ψ
+ += + −
+ − −
⎧ ⎫⎡ ⎤ ⎡ ⎤⎪ ⎪⎢ ⎥ ⎢ ⎥⎨ ⎬⎢ ⎥ ⎢ ⎥⎪ ⎪⎣ ⎦ ⎣ ⎦⎩ ⎭
donde:
' 21 0 2 0 0( )( )F X X X X X= + + −
2
' '2,
d dψ ψ Componentes d-q del flujo magnético del rotor [Wb].
0 0,d qψ ψ Componentes d-q del flujo de magnetización [Wb].
2
'1,R R Resistencias de los devanados de una fase del estator y del rotor referido
al circuito del estator respectivamente [Ω].
2
'1,X X Reactancias a la frecuencia nominal de la corriente del estator y del rotor
referido al circuito del estator respectivamente [Ω]. 0X Reactancia de magnetización del motor de doble fase equivalente a la
frecuencia nominal de la corriente del estator [rad/s]. J Momento de inercia del rotor [Kgm2]. p Número de par de polos.
(2.6)

IPN-SEPI-ESIME-ELÉCTRICA 12
0 0
( )( ) 0
o
od odo o
o
para
ff para
ψ
ψ ψψ ψ
ψ
=
=≠
⎧⎪⎨⎪⎩
0 0
( )( ) 0
o
oqoqo o
o
para
ff para
ψ
ψψψ ψ
ψ
=
=≠
⎧⎪⎨⎪⎩
La amplitud del flujo de magnetización esta expresada por:
2 2
o od oqψ ψ ψ= +
Como se nota, para poder realizar los cálculos se necesita conocer la función f(ψ0). Dicha función se pude definir conociendo la curva de magnetización del material magnético del motor investigado. Para nuestros fines se puede sustituir la curva de magnetización real por una aproximación de una línea quebrada. Entonces la función f(ψ0) se describe por la fórmula siguiente [14]:
max
max max
0( )
( )
o o
o oo o o o
n
para i if X
i i para i iψ
ω
≤
=− >
⎧⎪⎨⎪⎩
donde:
0i Amplitud de la corriente de magnetización
0maxi Valor máximo de la amplitud de la corriente de magnetización cuando el material magnético del motor no entra todavía en saturación. El valor máximo de la amplitud de la corriente de magnetización se puede calcular en la forma aproximada de la fórmula siguiente [29]:
( )max 22
1 0 1
mo
uiR X X
=+ +
donde:
mu Valor nominal de la amplitud del voltaje de fase del estator [V]. Las componentes del vector de la corriente del rotor referido al circuito del estator están expresados por:
' '2 2 1'
2
1cos ( )d n d o n od
o
i X i fX X
ωψ ξ ω ψ= − ++
⎡ ⎤⎣ ⎦
(2.10)
(2.7)
(2.8)
(2.9)
(2.11)

IPN-SEPI-ESIME-ELÉCTRICA 13
' '2 2 1'
2
1sin ( )q n q o n oq
o
i X i fX X
ωψ ξ ω ψ= − ++
⎡ ⎤⎣ ⎦
Para poder definir si el material magnético del motor entra o no en saturación, es necesario calcular el valor instantáneo de la amplitud de la corriente de magnetización en función de las variables del modelo matemático del motor. Esta amplitud se describe por la siguiente fórmula [14]:
( ) ( )2 2' '0 1 2 1 2d d q qi i i i i= + + +
donde:
1 1,d qi i Componentes en los ejes d-q de la corriente del estator [A].
2
' '2,
d di i Componentes en los ejes d-q de la corriente del rotor [A]. La amplitud de la corriente del rotor referida al circuito del estator es:
2 2' ' '
2 2 2d qi i i= +
Las componentes del vector de voltaje de alimentación son:
1 1 1 1
1 1 1 1 1
(cos )cos cos sinod
d r r oq
n n n
dX di X Xdu i R i i
dt dt dtψξ
ξ ξ ω ξ ω ψω ω ω
= + + + − −
1 1 1 11 1 1 1 1
(sin )sin sin cosoq
q r r od
n n n
dX di X Xdu i R i i
dt dt dt
ψξξ ξ ω ξ ωψ
ω ω ω= + + + − −
donde:
1 1,d qu u Componentes de los ejes d-q del voltaje de alimentación [V].
La amplitud del voltaje de alimentación está dada por:
2 21 1d qu u u= +
(2.14)
(2.15)
(2.16)
(2.17)
(2.13)
(2.12)

IPN-SEPI-ESIME-ELÉCTRICA 14
2.4 Pérdidas de energía eléctrica. Las pérdidas de las máquinas eléctricas son las siguientes [12]:
• Pérdidas mecánicas incluyen fricción y rozamiento, que están en función de la velocidad.
• Pérdidas en el hierro (llamadas también las pérdidas magnéticas) producidas por histéresis y corrientes de eddy, que están en función del voltaje y frecuencia del estator.
• Pérdidas en el cobre en los devanados del estator y rotor (llamadas también las pérdidas eléctricas), que están en función de la corriente del estator y rotor.
Es importante tener en cuenta dichas pérdidas por al menos dos razones: las pérdidas determinan la eficiencia de la máquina e influyen mucho en su costo de operación, las pérdidas determinan el calentamiento de la máquina y por consiguiente la capacidad o potencia de salida que puede obtenerse sin sobrepasar el límite de deterioro del aislamiento [13]. En este trabajo solo se consideran las pérdidas de energía eléctrica que son: las pérdidas en el cobre y las pérdidas en el hierro. Si el modelo del motor considera las pérdidas [6], [7], la minimización de las pérdidas y el flujo óptimo es calculado analíticamente. La principal ventaja de este método es la simplicidad y no requiere hardware externo. Sin embargo, es obligatorio un conocimiento exacto de los parámetros, por ejemplo los cambios considerables con la temperatura, saturación, efecto piel, etc. En teoría, la teoría del control óptimo resuelve el problema de optimización con herramientas (programación dinámica) que calculan la trayectoria del flujo óptimo. Sin embargo esta aproximación presenta dificultad para ser implementada [8] y también es sensible al cambio de parámetros [9]. La minimización de las pérdidas en el estado dinámico, no es igual que cuando se minimizan estas pérdidas en el estado estacionario. Se debe utilizar un método diferente, por ejemplo el método de programación dinámica [10, 11] o principio de máximo de Pontryagin [19, 20, 21]. 2.4.1 Pérdidas eléctricas Las pérdidas de energía eléctrica en las resistencias de los devanados del rotor y del estator del motor están provocadas por el efecto de Joule. Durante un tiempo de observación t r (por ejemplo el tiempo de arranque del motor) dichas pérdidas en el motor trifásico se expresan por la siguiente fórmula [33]:
22 ' '1 1 2 2
0
3 ( ) ( )2
rt
cQ R i t R i t dt⎡ ⎤= +⎣ ⎦∫ (2.17)
donde: cQ son las pérdidas de energía eléctrica en las resistencias de los devanados del estator y
del rotor del motor trifásico t r es el tiempo de observación (por ejemplo de arranque, de control etc.)
IPN-SEPI-ESIME-ELÉCTRICA 15
Como se puede observar de la fórmula (2.17), las pérdidas eléctricas dependen de los valores instantáneos de las corrientes del estator 1( )i t y del rotor '
2 ( )i t y de los valores de las resistencias de los devanados del estator 1R y del rotor '
2R . En general las resistencias de los devanados del estator y del rotor en las condiciones de operación del motor no son constantes y varían con la temperatura, efecto superficial (efecto piel) de la corriente alterna (sobre todo cuando en la corriente aparecen las armónicas de orden mayor cuando la alimentación del motor es no senoidal), distribución no uniforme de la corriente entre los conductores etc. [22]. Cuando la alimentación del motor es senoidal y,sobre todo, para los motores de inducción de jaula de ardilla que tienen el rotor de barras cercanas a la superficie como son, por ejemplo, los motores de diseño NEMA (National Electrical Manufacturers Association) clase A y D, se puede aceptar que las resistencias de los devanados del estator y del rotor son prácticamente constantes durante el control de velocidad del motor. 2.4.2 Pérdidas magnéticas Los motores de inducción operan gracias a que generan en su devanado primario (de estator) un campo magnético rotatorio que hace girar a su devanado secundario (de rotor). Para que el motor sea eficiente y de tamaño razonable, el campo magnético debe establecerse, concentrarse y dirigirse por medio de una estructura de material magnético de alta calidad, tanto en el estator como en el rotor (el núcleo magnético del motor), con un espacio de aire o entrehierro mínimo entre el estator y el rotor. Cuando los dominios magnéticos del material magnético son magnetizados primero en una dirección y luego en dirección opuesta por la corriente alterna aplicada, ocurre una pérdida de energía dentro del núcleo magnético, lo cual se manifiesta en forma de calor y se denomina pérdida por histéresis. Esta pérdida aumenta con el aumento de la densidad de flujo magnético (con la mayor corriente) o con la frecuencia de esta corriente. El campo magnético alterno induce también pequeñas tensiones en el núcleo magnético de motor lo cual genera corrientes que circulan al azar por este núcleo. Estas corrientes se denominan corrientes parásitas (llamadas también: corrientes giratorias, corrientes eddy o corrientes de remolino) y al actuar sobre la resistencia eléctrica del material magnético producen las pérdidas de energía eléctrica que se manifiestan en forma de calor. Las pérdidas de potencia en el núcleo magnético del motor se dividen entonces entre las pérdidas Pg provocadas por las corrientes giratorias y las pérdidas Ph provocadas por la histéresis [32]:
P+P=P hgm (2.18) donde: Pm son las pérdidas de potencia en el material magnético Pg son las pérdidas provocadas por las corrientes giratorias Ph son las pérdidas provocadas por la histéresis Las pérdidas provocadas por las corrientes giratorias se dividen entre las clásicas Pgcl (relacionadas con el grosor y resistividad de la lámina de la cual está construido el núcleo magnético del motor) y las pérdidas causadas por las anomalías de las corrientes giratorias Pgan (relacionadas con la estructura cristalina de la lámina) [32]:

IPN-SEPI-ESIME-ELÉCTRICA 16
P+P=P gangclg (2.19) donde: Pgcl son las pérdidas clásicas. Pgan son las pérdidas de anomalías. Hasta la fecha no existen las fórmulas teóricas que permiten calcular las pérdidas magnéticas en la manera exacta, sobre todo cuando la alimentación no es senoidal. Algunos autores proponen calcular dichas pérdidas utilizando las fórmulas empíricas que aprovechan el coeficiente de forma de la onda de alimentación [52]. Otros autores proponen las fórmulas también empíricas pero basadas en el análisis espectral de la onda de alimentación [23]. En general, cuando la alimentación es senoidal, las pérdidas clásicas se pueden expresar como sigue [30]:
,2 22
gcl i mcm
1= dP B24γ ω
ρ (2.20)
donde: d es el grosor de la lámina de la cual está construido el núcleo magnético del motor
medida en [m] ,i mB es la densidad máxima de flujo magnético medida en [T] (ver la Fig. 2.3)
γ c es la conductividad específica de la lámina medida en [S/m]
mρ es la densidad específica de la lámina medida en [kg/m3] f2 = πω es la frecuencia angular de la corriente senoidal medida en [rd/s] (f es la
frecuencia de esta corriente medida en [Hz]). Las pérdidas causadas por las anomalías de las corrientes giratorias se describen como sigue [30];
(2.21) donde: l es la distancia entre las paredes de los dominios magnéticos que forman las bandas
paralelas del grosor d .
,2 22
gan gcl i mcm
l 1.628 l = 1.628 = dP P Bd 24 dγ ω
ρ
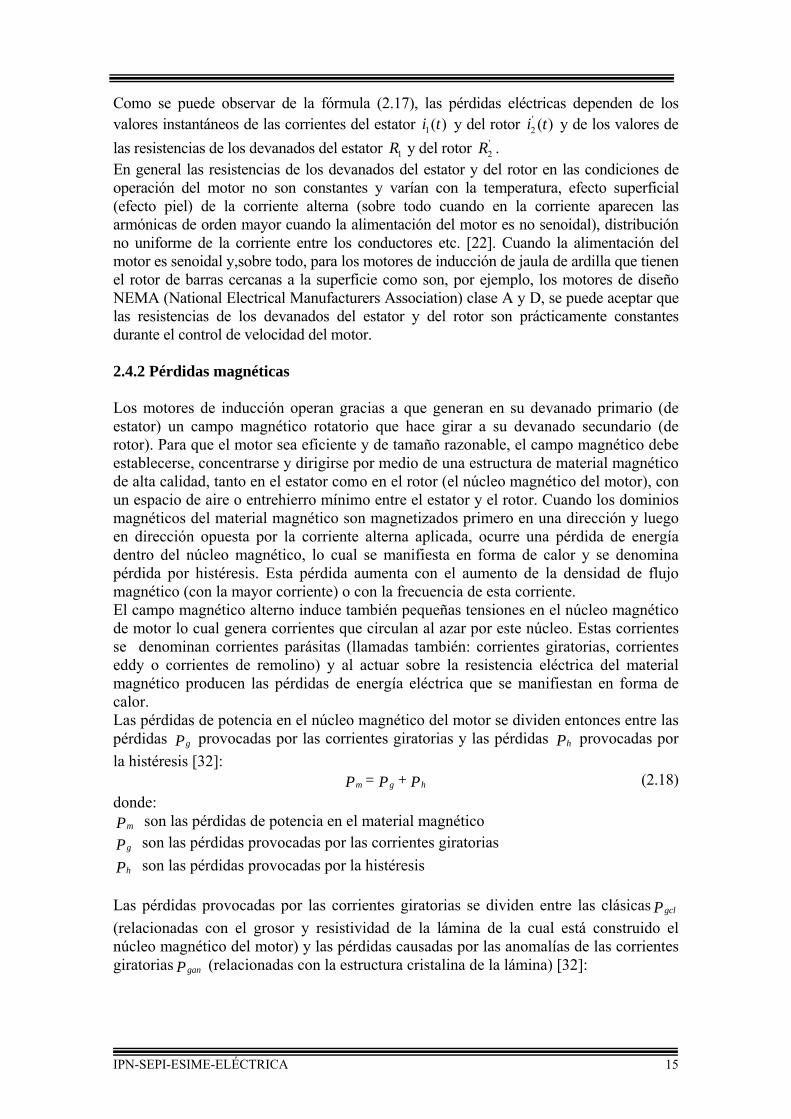
IPN-SEPI-ESIME-ELÉCTRICA 17
H
B
Hm
Bm
curva demagnetización
ciclo límite dehistéresis
H2m
B2m
H1m
B1m
Fig. 2.3 Ciclos de histéresis para diferentes valores de intensidad del campo magnético. (B –densidad de flujo magnético medida en [T], H - intensidad del campo magnético medida en [A/m]). Las pérdidas provocadas por la histéresis son iguales a la superficie del ciclo de histéresis ( HdB = Wh ∫ ) multiplicada por la frecuencia de imantación f . Actualmente no existe [30] el método exacto de calcular teóricamente el ciclo de histéresis. Por esto las pérdidas provocadas por la histéresis se calculan de las fórmulas empíricas. Para los rangos de cambios de la inducción magnética y para las láminas electrotécnicas aplicadas en las máquinas eléctricas y en los transformadores, se utiliza muy

IPN-SEPI-ESIME-ELÉCTRICA 18
frecuentemente, para calcular las pérdidas provocadas por histéresis, la fórmula aproximada de Richter [30]:
2,h i m
fP = B100
ε (2.22)
donde: ε es un coeficiente constante del valor dependiente del tipo de la lámina (para la
lámina de transformadores que contiene 4% de silicio ]kg H / m[0.22.1 4− = ε ). Basándose en las fórmulas (2.18) – (2.21) y (2.22) se puede escribir:
, [ ]2m i m z z= + P B A Bω ω (2.23)
donde:
m
cz 24
) l 1.628 + d ( d = A
ργ
πε
200 = Bz
La fórmula (2.23) expresa las pérdidas de potencia (las pérdidas instantáneas) por unidad de masa [medidas en W/kg] para la frecuencia angularω . Como se nota de la fórmula (2.23), para un material magnético dado las pérdidas magnéticas dependen exclusivamente del valor de la densidad máxima mB de flujo magnético y de la frecuencia de la corriente que provoca dichas pérdidas. Si dichas magnitudes no son constantes pero varían en el tiempo ( , , ( ), ( )i m i mB B t tω ω= = ), las pérdidas magnéticas por unidad de masa P obtenidas durante el tiempo rt , medidas en [J/kg], son:
( )2,
0
( ) ( ) ( )rt
i m z zP B t t A t B dtω ω= +∫ (2.24)
El valor máximo de la densidad del flujo magnético se puede determinar sobre la base de la curva de magnetización del material magnético, como se presenta en la Fig. 2.3. La curva de magnetización determina la dependencia entre el valor máximo ,i mB de densidad del flujo magnético y el valor máximo (amplitud en el caso de la onda senoidal) de la intensidad del campo magnético ,i mH . Para diferentes valores máximos
,i mH de la intensidad del campo magnético se obtienen diferentes ciclos de histéresis con sus valores máximos correspondientes ,i mB de la densidad del flujo magnético (Fig. 2.3). Sin embargo, sobrepasando un valor determinado mH de la intensidad del campo magnético, característico para el material magnético dado, se llega al ciclo límite de histéresis y el valor máximo correspondiente mB de la densidad del flujo magnético prácticamente ya no se aumenta con el crecimiento de la intensidad del campo magnético (sucede la saturación).
IPN-SEPI-ESIME-ELÉCTRICA 19
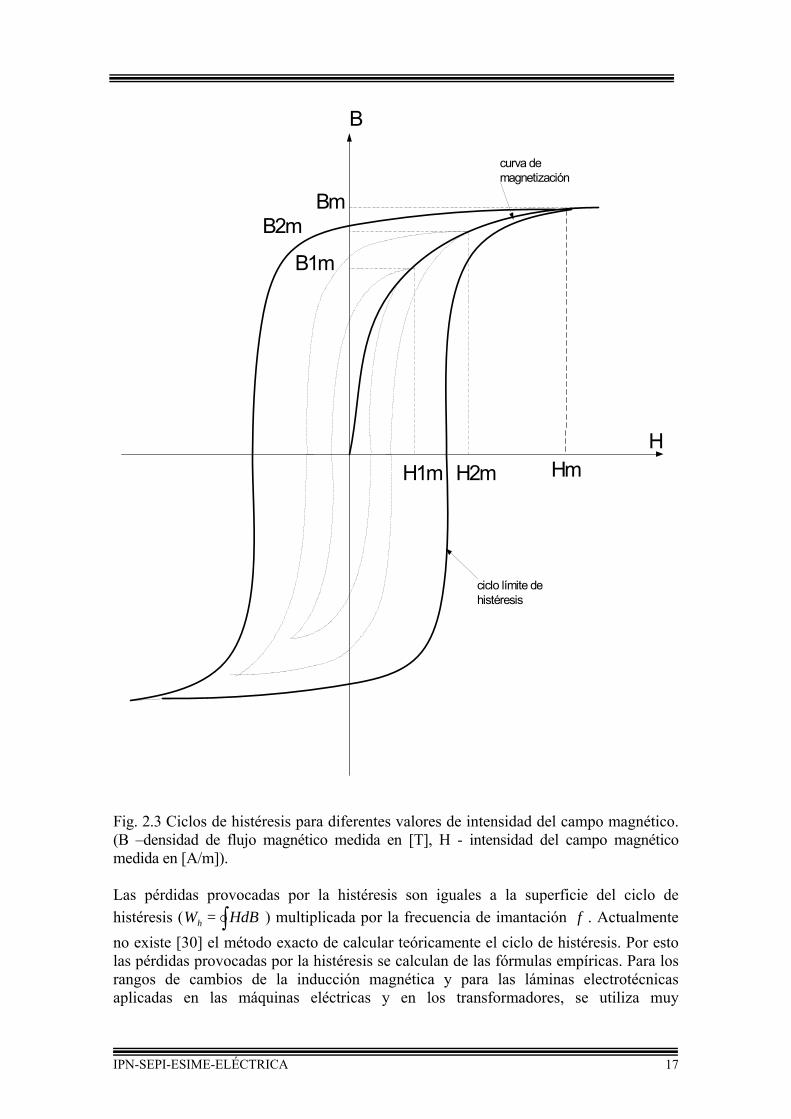
Por lo tanto, para simplificar los cálculos, se puede aceptar la aproximación de la curva de magnetización real por una curva quebrada, compuesta por dos segmentos de la línea recta, como se presenta en la Fig. 2.4.
H
B
Bm
Hm
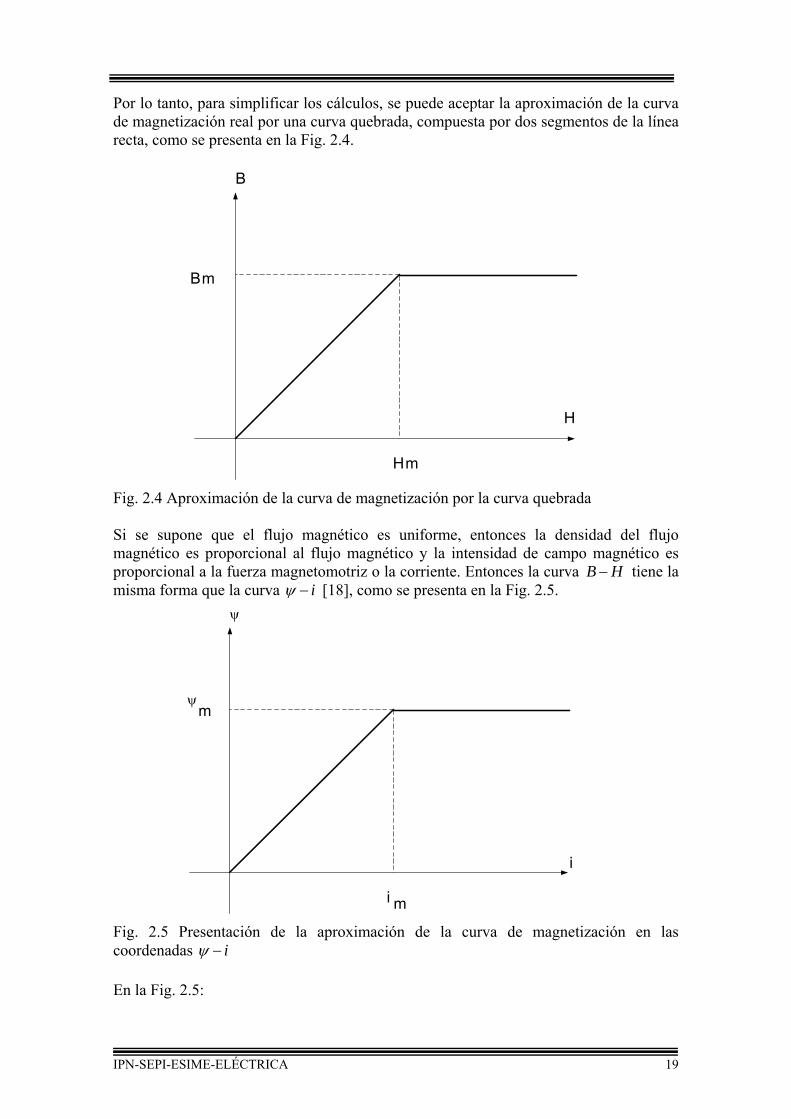
Fig. 2.4 Aproximación de la curva de magnetización por la curva quebrada Si se supone que el flujo magnético es uniforme, entonces la densidad del flujo magnético es proporcional al flujo magnético y la intensidad de campo magnético es proporcional a la fuerza magnetomotriz o la corriente. Entonces la curva B H− tiene la misma forma que la curva iψ − [18], como se presenta en la Fig. 2.5.
i
ψ
m
i
ψ
m
Fig. 2.5 Presentación de la aproximación de la curva de magnetización en las coordenadas iψ − En la Fig. 2.5:

IPN-SEPI-ESIME-ELÉCTRICA 20
ψ es el flujo magnético que pasa por el material magnético i es la amplitud de la corriente ( )i t que provoca este flujo magnético ( )i t es la corriente que provoca el flujo magnético
mψ es el valor máximo del flujo magnético (valor de saturación)
mi es el valor máximo admisible de la amplitud de la corriente para que el material magnético no entre en la saturación. Bajo estas suposiciones la dependencia entre el flujo magnético y la corriente se puede describir como sigue:
( ) mn
m m
XLi i para i it
para i iωψ
ψ
⎧ = ≤⎪= ⎨⎪ >⎩
(2.25)
donde: L es la inductancia del devanado por el cual pasa la corriente senoidal ( )i t , X es la reactancia de este devanado calculada para la frecuencia nominal de la corriente ( )i t ,
nω es la frecuencia angular nominal de la corriente ( )i t . Las pérdidas de energía eléctrica en el núcleo magnético del motor de inducción están provocadas por las variaciones de los flujos magnéticos que existen en él. Basándose en el modelo matemático del motor de inducción de doble fase equivalente, se pueden distinguir en general tres flujos magnéticos: el flujo de magnetización oψ provocado por la corriente de magnetización ( )oi t que pasa por la reactancia de magnetización oX , el flujo de dispersión del estator 1ψ concatenado con el devanado del estator de la reactancia de dispersión 1X por el cual pasa la corriente de estator 1( )i t y el flujo de dispersión del rotor '
2ψ referido al circuito de estator concatenado con el devanado de rotor de la reactancia '
2X referida al circuito de estator, por el cual pasa la corriente '2 ( )i t referida al circuito de estator.
Frecuentemente se considera que el núcleo magnético del motor de inducción entra en saturación cuando el flujo de magnetización llega al valor omψ obtenido para la alimentación nominal del motor y con la velocidad síncrona ideal (cuando en el circuito del rotor la corriente es nula). Entonces la amplitud límite de la corriente de magnetización tiene aproximadamente el valor siguiente [30]:
( )max 22
1 1
mo
o
uiR X X
≅+ +
(2.26)
donde:
maxoi es el valor máximo de la amplitud de la corriente de magnetización, para el cual el material magnético del motor todavía no entra en la saturación,
1R es la resistencia del devanado del estator,

IPN-SEPI-ESIME-ELÉCTRICA 21
1X es la reactancia de dispersión de una fase del devanado de estator del motor de doble fase equivalente calculada para la frecuencia nominal de la corriente de estator,
oX es la reactancia de magnetización del motor de doble fase equivalente calculada para la frecuencia nominal de la corriente del estator. La dependencia de la densidad de flujo de magnetización de la amplitud de corriente de magnetización, se describe como sigue [30]:
maxmax
max
oom o o
oo
om o o
iB para i iiB
B para i i
⎧ ≤⎪= ⎨⎪ >⎩
(2.27)
donde oi es la amplitud de la corriente de magnetización que varía en el tiempo durante el cambio de velocidad del motor. Las pérdidas en el núcleo magnético de motor de inducción, provocadas por las corrientes giratorias y por histéresis, se pueden calcular por separado para el estator y el rotor [18]. Puesto que la frecuencia de las corrientes giratorias y de imantación en el estator es igual a la frecuencia de la corriente de alimentación (suponiendo que dicha corriente es senoidal), entonces, si denominamos la masa del estator por sM , la fórmula que describe las pérdidas de potencia en el estator msP es la siguiente:
2 [ ]ms s z zo= B + P M A Bω ω (2.28) donde: M s es la masa del material magnético del estator del motor medida en [kg]
msP son las pérdidas magnéticas totales de potencia en el núcleo del estator del motor medidas en [W]
ω es la frecuencia de la corriente o voltaje de alimentación. Si se supone que el núcleo magnético del rotor del motor está construido del mismo material magnético que el de estator (de la misma lámina), se toma en consideración que la frecuencia angular de las corrientes giratorias y de imantación en el rotor es:
' rω ω ω= − (2.29) donde:
,ω es la frecuencia angular de las corrientes giratorias y de imantación en el rotor
rω es la velocidad angular del rotor del motor con un par de polos ω es la frecuencia angular de la corriente del estator y se denota la masa del material magnético de rotor por rM , la fórmula que describe las pérdidas magnéticas de potencia en el rotor mrP , se puede expresar (basándose en la fórmula (2.23)) en la manera siguiente:

IPN-SEPI-ESIME-ELÉCTRICA 22
2 [ ]mr r z zo r r = B ( ) ( ) + P M A Bω ω ω ω− − (2.30) donde: M r es la masa del material magnético del rotor del motor medida en [kg]
mrP son las pérdidas magnéticas totales de potencia en el núcleo del rotor del motor medidas en [W].
Las pérdidas magnéticas totales de potencia en el núcleo magnético del estator y del rotor Pmt , son iguales a la suma de las pérdidas en el estator y en el rotor:
mt ms mr= + P P P (2.31) donde: Pmt son las pérdidas magnéticas totales de potencia en el núcleo magnético del estator y
del rotor. Tomando en consideración (2.28) y (2.30) de la fórmula (2.31) se obtiene:
( ) ( )22 2 2mt s o z z r o z r z rP M B A B M B A Bω ω ω ω ω ω⎡ ⎤⎡ ⎤= + + − + −⎣ ⎦ ⎣ ⎦ (2.32)
Las pérdidas de energía en el núcleo magnético del motor durante el tiempo de control
rt , se pueden describir como sigue:
( ) ( ) 22 2
0 0
r rt t
m mt o s z z r z r z rQ P dt B M A B M A B dtω ω ω ω ω ω⎡ ⎤⎡ ⎤= = + + − + −⎣ ⎦ ⎣ ⎦∫ ∫ (2.33)
donde: mQ son las pérdidas de energía eléctrica en el núcleo magnético del motor durante el
tiempo de control rt obtenidas con la alimentación senoidal.
Basándose en (2.33) y (2.27) las pérdidas magnéticas del motor para el tiempo de control rt , expresadas en términos de la masa total del motor mM y la masa del rotor
rM se describen como sigue:
( ) ( )2 2
0
maxmax
max
2rt
m o z m z m r z r r z r z r
oom o o
oo
om o o
Q B A M B M M A M A B dt
iB para i iiB
B para i i
ω ω ω ω ω⎡ ⎤= + − + −⎣ ⎦
⎧ ≤⎪= ⎨⎪ >⎩
∫ (2.34)
IPN-SEPI-ESIME-ELÉCTRICA 23
CAPITULO 3
DISEÑO DEL CONTROL ÓPTIMO DE LA VELOCIDAD DE MOTORES DE INDUCCIÓN QUE MINIMIZA LAS PÉRDIDAS DE ENERGÍA ELÉCTRICA
3.1 Introducción Para encontrar el control óptimo, se deben seleccionar las variables de control del sistema, tales que maximizan o minimizan a un índice de optimización dentro de limitaciones (rangos admisibles de los cambios) y dentro de los enlaces (las ecuaciones que describen el objeto de control) puestos sobre las variables de control que frecuentemente no son las variables independientes. El sistema óptimo, es el mejor sistema desde el punto de vista de algún criterio elegido de evaluación del funcionamiento o comportamiento del sistema. Para formular matemáticamente el problema de optimización se debe obtener:
- La descripción matemática del objeto de control (modelo matemático del objeto de control).
- Las limitaciones de las señales de control y eventualmente de las variables del objeto de control.
- El índice de optimización (el criterio de optimización). El problema de determinación del control óptimo consiste en la determinación del control admisible (que cumple con las limitaciones) que satisfacen las ecuaciones que describen el objeto de control (el modelo del objeto de control) y que garantiza el valor extremo (máximo o mínimo) del índice de optimización (que es una funcional), cambiando el estado del sistema controlado del estado inicial al estado final en un tiempo predeterminado o no. El diseño del control óptimo es realizado utilizando el modelo del motor descrito en el capítulo 2 (que considera los transitorios electromagnéticos y la saturación del núcleo magnético y está alimentado por un convertidor de frecuencia de corriente) y el principio del máximo de Pontryagin [19, 20, 21]. Se busca como variar en el tiempo las variables de control que son: la amplitud de la corriente del estator 1( )i t y el ángulo
( )tξ (entre los vectores de la corriente del estator y la corriente del rotor referida al circuito de estator), para minimizar las pérdidas de energía eléctrica durante el control de la velocidad del motor de inducción y limitar la amplitud de la corriente del estator a un valor deseado:
oii 11 ≤ donde:
1oi es el valor admisible de la amplitud de la corriente del estator del motor.
(3.1)

IPN-SEPI-ESIME-ELÉCTRICA 24
e
m
Q⎡ ⎤
= ⎢ ⎥⎣ ⎦
3.2 Índice de optimización El índice de optimización utilizado en este trabajo toma en consideración ambos tipos de pérdidas de la energía eléctrica que ocurren en el motor, a saber: las pérdidas en el cobre y las pérdidas en el hierro. Las pérdidas en el cobre del motor, durante el tiempo de control rt , se expresan por la fórmula siguiente:
22 ' '1 1 2 2
0
3 ( ) ( )2
rt
cQ R i t R i t dt⎡ ⎤= +⎣ ⎦∫
Las pérdidas en el hierro durante el tiempo de control rt , se pueden describir como sigue:
( ) ( )2 2
0
maxmax
max
( ) 2 ( ) ( ) ( ) ( )rt
m o z m z m r z r r z r z r
oom o o
oo
om o o
Q B A M t B M M A t t M A t B t dt
iB para i iiB
B para i i
ω ω ω ω ω⎡ ⎤= + − + −⎣ ⎦
⎧ ≤⎪= ⎨⎪ >⎩
∫
(3.3)
Puesto que se tienen dos índices escalares (3.2) y (3.3), entonces dichos índices pueden ser consideradas como las componentes de un índice vectorial y el problema de optimización se convierte en el de tipo de optimización vectorial u optimización multicriterial [33].
Existen muchos métodos de formulación del problema de optimización cuando se tiene que satisfacer simultáneamente muchos criterios escalares de optimización [24]. En el trabajo se acepta la transformación del índice vectorial a un índice de optimización escalar en la forma de la combinación lineal de las dos componentes del índice vectorial (3.2) y (3.3) multiplicados por unos coeficientes de peso:
3.3 Control que minimiza las pérdidas eléctricas Aplicando el procedimiento del principio del máximo de Pontryagin (apéndice A), con base al modelo del motor de inducción (2.6) y tomando en consideración el índice de optimización (3.2), se crea la función llamada Hamiltoniano, la cual tiene la forma siguiente:
2 1 2
1 2
1 2
0, 01
m eQ Q Qλ λλ λλ λ
= + ⎫⎪≥ ≥ ⎬⎪+ = ⎭
(3.2)
(3.4)
(3.5)

IPN-SEPI-ESIME-ELÉCTRICA 25
( )
( )
( )
( )( )
( )
2 ' '21 1 2 2
' ' ''2 2 0 2
1 2 1' ' '0 2 0 2 0 2
' ' ''2 2 0 2
2 2 1' ' '0 2 0 2 0 2
' '12 2 2
03 '
' ' '0 22 2 2
32
cos
sin
sin cos32
n nd od
n nq oq
d qn n
q od q
H R i R i
R R X RV i fX X X X X X
R R X RV i fX X X X X X
i Fp XV
JF X X X f f
ω ωψ ξ ψ
ω ωψ ξ ψ
ψ ξ ψ ξω ω
ψ ψ ψ
= − + +
⎛ ⎞+ − + − +⎜ ⎟+ + +⎝ ⎠
⎛ ⎞+ − + − +⎜ ⎟+ + +⎝ ⎠
− ++
++ − ( )( )
0
oq
M pJ
ψ
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪
⎧ ⎫⎡ ⎤ ⎪⎪ ⎪⎢ ⎥ ⎪⎪ ⎪−⎨ ⎬⎢ ⎥ ⎪⎪ ⎪⎢ ⎥ ⎪⎪ ⎪⎣ ⎦⎩ ⎭⎭
( ) ( )
( ) ( )
' 2 2 '2 0 0 21
1 3 1 3' ' '0 2 0 2 0 2
' 2 2 '2 0 0 22
2 3 1 3' ' '0 2 0 2 0 2
3 03
3 3sin ( )2 2
3 3cos ( )2 2
n noq
n nod
r
R p X p X XdV V V i V fdt X X J X X JF X X
R p X p X XdV V V i V fdt X X J X X JF X X
dV Mp Vdt J
ω ωξ ψ
ω ωξ ψ
ω
⎫= − + ⎪+ + + ⎪
⎪⎪= + − ⎬+ + + ⎪⎪∂ ⎪=
∂ ⎪⎭
1
0
0
H
Hi
ξ∂ ⎫= ⎪∂ ⎪
⎬∂ ⎪=⎪∂ ⎭
( ) ( ) ( )2
' ' '1 2 1 2 3 2 2'
1 2
3cos sin sin cos23
oopt d q
o
X pi R V V VJR X X
ξ ξ ψ ξ ψ ξ⎡ ⎤
= + + −⎢ ⎥+ ⎣ ⎦
donde 1 2 3, ,V V V son las variables conjugadas que satisfacen las ecuaciones conjugadas siguientes: Para que el control sea óptimo, de acuerdo con el principio de máximo de Pontryagin, se tienen que cumplir las ecuaciones siguientes: Resolviendo la segunda de estas ecuaciones se obtiene: donde 1opti es el valor óptimo de la amplitud de una fase de la corriente de estator del motor sin tomar en consideración la limitación de dicha amplitud. El valor 1opti descrito por la relación (3.9) garantiza que el Hamiltoniano (3.6) obtiene el valor máximo, pero no asegura el cumplimiento de la condición (3.1).
(3.6)
(3.7)
(3.8)
(3.9)

IPN-SEPI-ESIME-ELÉCTRICA 26
01 1 1
1 0 01 1 1
opt opt
opt
i para i ii
i para i i
⎧ ≤⎪= ⎨>⎪⎩
2 2' ' ' '
1 2 3 2 2 2 3 23 3sin cos 02 2q dp pV R V V R VJ J
ξ ψ ξ ψ⎛ ⎞ ⎛ ⎞− + + + =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Para cumplir la limitación (3.1) y maximizar el Hamiltoniano (3.6) la amplitud de la corriente del estator debe satisfacer la siguiente fórmula [33]: donde el valor 1opti está descrito por la fórmula (3.9). La primer ecuación de (3.9) tiene, para el Hamiltoniano (3.7), la forma siguiente: Tratando la ecuación (3.11) como un producto escalar de dos vectores y tomando en consideración que el valor del Hamiltoniano (3.6) es máximo para el control óptimo, se obtiene el control óptimo que minimiza las pérdidas eléctricas, descrito en la forma implícita:
(3.12) Las fórmulas (3.9), (3.10) y (3.12) describen el control óptimo en forma implícita. Para encontrar el control en forma explícita, hay que resolver el problema de doble valor a la frontera, es decir, hay que encontrar los valores iniciales de las variables conjugadas, utilizando, por ejemplo, el algoritmo híbrido de optimización paramétrica ([34], apéndice E). Conociendo dichos valores iníciales así como el tipo de la carga con la cual trabaja el motor de inducción (sabiendo cómo se cambia en función de la velocidad rω del motor el par de la carga oM ), se puede resolver el sistema de las ecuaciones canónicas, compuesto por las ecuaciones de estado (2.6) (que describen el modelo del motor – ver el capítulo 2) y las ecuaciones conjugadas (3.7), utilizando una computadora y, en consecuencia, determinar el control óptimo en forma explícita 1( )i t , ( )tξ . Durante la solución de las ecuaciones canónicas hay que aplicar el control en la forma implícita (3.9), (3.10) y (3.12) y las fórmulas siguientes:
(3.13)
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
+=
2'2
2
3'22
2'2
2
3'21
'2
2
3'21
2'2
2
3'22
2'2
2
3'21
'2
2
3'22
23
23
23
cos
23
23
23
sin
dq
q
dq
d
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
ψψ
ψξ
ψψ
ψξ
(3.10)
(3.11)
dttdt
dtt d t =
dttdt ) )( cos ( )(sin - ))(sin()(cos)()(' ξξξξξβ =

IPN-SEPI-ESIME-ELÉCTRICA 27
(3.14) para determinar la frecuencia de la corriente de alimentación. Resolviendo estas ecuaciones se determinan: el tiempo de control rt , las variables de interés como por ejemplo, el control óptimo de voltaje, el par electromagnético del motor, la amplitud de la corriente de magnetización, la amplitud de la corriente del rotor, las pérdidas de energía eléctrica en los devanados del estator y del rotor, la amplitud del flujo de magnetización etc. 3.4 Control que minimiza las pérdidas magnéticas En este caso el problema de optimización consiste en la búsqueda de la descripción matemática del control óptimo 1( )i t , ( )tξ que garantiza la minimización del índice de optimización (3.3) y asegura que la amplitud de la corriente del estator cumple la condición (3.1). Considerando el modelo del motor de inducción (2.6) y el índice de optimización (3.3) se puede describir el Hamiltoniano en la siguiente forma:
(3.15)
donde 1 2 3, ,V V V son las variables conjugadas que satisfacen las ecuaciones conjugadas siguientes:
(3.16)
Para que el control sea óptimo, de acuerdo con el principio de máximo de Pontryagin (apéndice A), se tienen que cumplir las ecuaciones (3.8).
( ) ( ) ( )
( ) ( ) ( )
( )
' 2 2 '2 0 0 21
1 3 1 3' ' '0 2 0 2 0 2
' 2 2 '2 0 0 22
2 3 1 3' ' '0 2 0 2 0 2
o233
r
3 3sin2 2
3 3cos2 2
M = 2
n noq
n nod
r o z r z
R p X p X XdV V V i V fdt X X J X X JF X X
R p X p X XdV V V i V fdt X X J X X JF X X
dV pM B A B Vdt J
ω ωξ ψ
ω ωξ ψ
ω ωω
⎫= − + ⎪+ + + ⎪
⎪⎪= + − ⎬+ + + ⎪⎪∂ ⎪− − + +⎡ ⎤⎣ ⎦ ∂ ⎪⎭
( ) ( )
( )
( )
( )
2 2
' ' ''2 2 0 2
1 2 1' ' '0 2 0 2 0 2
' ' ''2 2 0 2
2 2 1' ' '0 2 0 2 0 2
20
3 '0 2
( ) 2 ( ) ( ) ( ) ( )
cos
sin
32
o z m z m r z r r z r z r
n nd od
n nq oq
n
H = B A M t B M M A t t M A t B t
R R X RV i fX X X X X X
R R X RV i fX X X X X X
p XVJF X X
ω ω ω ω ω
ω ωψ ξ ψ
ω ωψ ξ ψ
ω
⎡ ⎤− + − + − +⎣ ⎦⎛ ⎞
+ − + − +⎜ ⎟+ + +⎝ ⎠⎛ ⎞
+ − + − +⎜ ⎟+ + +⎝ ⎠
++
( )
( ) ( )( )
' '12 2
0
' ' '2 2 2
sin cosd qn
q od q oq
i FM p
JX f f
ψ ξ ψ ξω
ψ ψ ψ ψ
⎫⎪⎪⎪⎪⎪⎪⎬⎪⎪⎧ ⎫⎡ ⎤ ⎪− +⎪ ⎪⎢ ⎥ ⎪−⎨ ⎬⎢ ⎥ ⎪⎪ ⎪⎢ ⎥+ − ⎪⎣ ⎦⎩ ⎭ ⎭
dttdtt r)()()( ξωω +=

IPN-SEPI-ESIME-ELÉCTRICA 28
2 2' ' ' '
1 2 3 2 2 2 3 23 3sin cos 02 2q dp pV R V V R VJ J
ξ ψ ξ ψ⎛ ⎞ ⎛ ⎞− + + + =⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠
Puesto que el Hamiltoniano (3.15) depende linealmente de la amplitud de la corriente del estator 1i , entonces su valor máximo se obtiene para el valor máximo admisible de dicha amplitud, es decir:
oopt ii 11 = (3.17)
La primer ecuación de (3.8) tiene, para el Hamiltoniano (3.15), la forma siguiente:
(3.18)
Tratando la ecuación (3.18) como un producto escalar de dos vectores y tomando en consideración que el valor del Hamiltoniano (3.15) es máximo para el control óptimo, se puede escribir:
(3.19)
Las fórmulas (3.17) y (3.19) describen el control óptimo en forma implícita. Se puede observar que el control (3.19) tiene la misma forma que el control (3.12) óptimo para minimizar las pérdidas eléctricas. Sin embargo las ecuaciones conjugadas para ambos tipos de control óptimo (las ecuaciones (3.7) para el control que minimiza las pérdidas eléctricas y las ecuaciones (3.16) para el control que minimiza las pérdidas en el hierro), son diferentes, lo que implica que los controles óptimos explícitos correspondientes son diferentes. Para encontrar el control en forma explícita, primero hay que resolver el problema de doble valor a la frontera, es decir, hay que encontrar los valores iniciales de las variables conjugadas, utilizando, por ejemplo, el algoritmo híbrido de optimización paramétrica [34, apéndice E]. Conociendo dichos valores iniciales así como el tipo de la carga con la cual trabaja el motor de inducción, se puede resolver el sistema de las ecuaciones canónicas (2.6), (3.16) utilizando una computadora y determinar el control óptimo en forma explícita
1( )i t , ( )tξ . Durante la solución de las ecuaciones canónicas hay que aplicar el control en la forma implícita (3.17), y (3.19) y las fórmulas (3.13) y (3.14) para determinar la frecuencia de la corriente de alimentación.
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
+=
2'2
2
3'22
2'2
2
3'21
'2
2
3'21
2'2
2
3'22
2'2
2
3'21
'2
2
3'22
23
23
23
cos
23
23
23
sin
dq
q
dq
d
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
ψψ
ψξ
ψψ
ψξ

IPN-SEPI-ESIME-ELÉCTRICA 29
3.5 Control que minimiza el índice (3.5) En este caso el problema de optimización es el de tipo de optimización vectorial o multicriterial. Se acepta entonces el índice de optimización (3.5) que para los índices escalares (3.2) y (3.3) obtiene la forma siguiente:
(3.20)
Tomando en consideración (3.20) y el modelo del motor de inducción (2.6) el Hamiltoniano obtiene la siguiente forma:
(3.21)
donde 1 2 3, ,V V V son las variables conjugadas que satisfacen las ecuaciones conjugadas siguientes:
(3.22) Resolviendo la segunda ecuación de las ecuaciones (3.8) se obtiene:
(3.23)
( )
' 2 '2 3 21
1 1' '2 2
' 2 '2 3 22
2 1' '2 2
232 3
3 ( ) sin2 ( )
3 ( ) cos2 ( )
2
n o noq
o o
n o nod
o o
or o z r z
r
R p X V XdV V f idt X X J X X F
R p X V XdV V f idt X X J X X F
dV MpM B A B Vdt J
ω ω ψ ξ
ω ω ψ ξ
λ ω ωω
⎫⎡ ⎤= + − ⎪⎢ ⎥+ + ⎣ ⎦ ⎪
⎪⎡ ⎤⎪= + − + ⎬⎢ ⎥+ + ⎣ ⎦⎪⎪∂
= − − + +⎡ ⎤ ⎪⎣ ⎦ ∂ ⎪⎭
( ) ( ) ( )2
' ' '1 2 1 2 3 2 2'
2 1 2
3cos sin sin cos23
oopt d q
o
X pi R V V VJR X X
ξ ξ ψ ξ ψ ξλ
⎡ ⎤= + + −⎢ ⎥+ ⎣ ⎦
( ) ( )
( ) ( )
( )
2 21
' ' '2 ' ' 2 '2 2 0 2
2 1 1 2 2 1 2 1' ' '0 2 0 2 0 2
' ' ''2 2 0 2
2 2 1' ' '0 2 0 2 0 2
( ) 2 ( ) ( ) ( )
3 ( ) ( ) cos 2
sin
o z m z m r z r r z r z r
n nd od
n nq oq
H B A M t B M M A t M A t B t
R R X RR i t R i t V i fX X X X X X
R R X RV i fX X X X X X
λ ω ω ω ω ω
ω ωλ ψ ξ ψ
ω ωψ ξ ψ
⎡ ⎤= − + − + − +⎣ ⎦⎛ ⎞
− + + − + − +⎜ ⎟+ + +⎝ ⎠⎛ ⎞
+ − + −⎜ + + +⎝ ⎠
( )( )
( ) ( )( )
' '12 2 2
0 03 '
' ' '0 22 2 2
sin cos32
d qn n
q od q oq
i Fp X M pV
JJF X X X f f
ψ ξ ψ ξω ω
ψ ψ ψ ψ
⎫⎪⎪⎪⎪⎪⎪+⎟ ⎬⎪⎪⎧ ⎫⎡ ⎤ ⎪− +⎪ ⎪⎢ ⎥⎪ ⎪ ⎪+ −⎨ ⎬⎢ ⎥ ⎪+⎪ ⎪⎢ ⎥+ − ⎪⎪ ⎪⎣ ⎦⎩ ⎭ ⎭
( )( )
2
21
0
2 ' ' 22 1 1 2 2
( )2 ( ) ( )
( ) ( )
( ) ( )
r
z m
to z m r z r
r z r z r
A M tB B M M A t t
Q dtM A t B t
R i t R i t
ωλ ω ω
ω ω
λ
⎧ ⎫⎡ ⎤+⎪ ⎪⎢ ⎥
+ − + +⎪ ⎪⎢ ⎥⎪ ⎪= ⎨ ⎬⎢ ⎥+ −⎣ ⎦⎪ ⎪⎪ ⎪⎡ ⎤+ +⎪ ⎪⎣ ⎦⎩ ⎭
∫

IPN-SEPI-ESIME-ELÉCTRICA 30
Donde 1opti es el valor óptimo de la amplitud de la corriente del estator sin tomar en consideración la limitación de dicha amplitud. Se observa que el control óptimo implícito
opti depende solamente del coeficiente 2λ y no depende del coeficiente 1λ . Sin embargo el control óptimo explícito depende también del coeficiente 1λ a través del control explícito ( )tξ , como se verá más adelante. Igualmente como en el caso de minimización de las pérdidas en el cobre (capítulo 3.3), para cumplir la condición (3.1) y maximizar el Hamiltoniano (3.21), la amplitud de la corriente del estator debe satisfacer la condición (3.10). La primer ecuación de (3.8) obtiene, para el Hamiltoniano (3.21), la forma siguiente:
(3.24) Tratando la ecuación (3.24) como un producto escalar de dos vectores y tomando en consideración que el valor del Hamiltoniano (3.21) es máximo para el control óptimo, se puede escribir:
(3.25) Las fórmulas (3.10), (3.23) y (3.25) describen el control óptimo en la forma implícita. Se puede observar que las fórmulas (3.25) son idénticas que las fórmulas (3.12) y (3.19) válidas para el control que minimiza las pérdidas en el cobre y las pérdidas en el hierro, respectivamente. Se nota que el control óptimo implícito (3.25) no depende de ninguno de los coeficientes 1λ , 2λ del peso de las pérdidas en el hierro ni en el cobre. Sin embargo el control óptimo explícito ( )tξ depende del coeficiente 2λ puesto que, para obtenerlo hay que resolver las ecuaciones canónicas compuestas por las ecuaciones que describen el modelo del motor de inducción (2.6) y las ecuaciones conjugadas (3.23) que dependen de 2λ . La dependencia del control óptimo explícito ( )tξ e 1( )i t de los coeficientes 1λ y
2λ , existe también a través del mismo índice de optimización (3.5) si se lo acepta como el índice de optimización paramétrica resolviendo el problema de doble valor a la frontera. Igualmente como en los casos anteriores de optimización escalar (minimización de las pérdidas en el cobre y minimización de las pérdidas en el hierro) también en este caso de optimización, para encontrar el control óptimo en la forma explícita 1( )i t , ( )tξ , hay que resolver el problema de doble valor a la frontera utilizando, por ejemplo, el algoritmo híbrido de optimización paramétrica [34, apéndice E].
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
−=
⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+−
+=
2'2
2
3'22
2'2
2
3'21
'2
2
3'21
2'2
2
3'22
2'2
2
3'21
'2
2
3'22
23
23
23
cos
23
23
23
sin
dq
q
dq
d
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
JpVRV
ψψ
ψξ
ψψ
ψξ
2 2' ' ' '2 1 3 2 2 2 3 2
3 3 psin +cos + + = 02 J 2 q d
pR V V R V VJ
ξ ψ ξ ψ⎧ ⎫ ⎧ ⎫− +⎨ ⎬ ⎨ ⎬
⎩ ⎭⎩ ⎭

IPN-SEPI-ESIME-ELÉCTRICA 31
CAPITULO 4
RESULTADOS DE SIMULACIÓN
4.1 INTRODUCCIÓN En este capitulo se presentan los resultados de solución del problema de doble valor en la frontera obteniendo los valores iniciales de las variables conjugadas lo que, junto con el diseño del control óptimo en forma implícita (ver el capítulo 3), constituye la base para determinar el control óptimo en forma explícita. Para solucionar el problema de doble valor en la frontera y determinar el control óptimo en forma explícita, se utiliza el algoritmo híbrido (ver el Apéndice D). También se presentan los resultados de las simulaciones hechas para el arranque en vacío del motor de inducción aplicando el control óptimo que da los resultados mejores desde el punto de vista de la minimización de las pérdidas totales. Para realizar dichas simulaciones se utiliza el programa D.2 (ver el Apéndice D). Los cálculos y las simulaciones se realizan para tres diferentes motores de inducción con rotor jaula de ardilla: 3 hp, 500 hp y 2250 hp y para dos diferentes valores límite de la amplitud de la corriente del estator: uno que garantiza que no suceda la saturación ( 0
1 11i i≤ ) y el otro que no lo garantiza ( 01 11i i> ) (ver el apéndice B), para
cada uno de estos motores. Para el diseño del control óptimo que minimiza las pérdidas en el cobre y en el hierro se utiliza el modelo del motor de inducción que considera los transitorios electromagnéticos y la saturación del hierro y se aplica el índice de la optimización que es la suma de ambos tipos de pérdidas con los coeficientes de peso correspondientes
1 2 1 2 1 2, ( 0, 0, 1)λ λ λ λ λ λ≥ ≥ + = (ver el capítulo 3). 4.2 SIMULACIÓN PARA EL MOTOR DE 3H.P. Los datos eléctricos de este motor son [4]:
' '1 2 1 2
2max
max
179.63 , 2, 377 /
0.435 , 0.816 , 0.754
26.13 , 0.089 6.681
0.463
,, 8.2
m n
o o
o b
u V p rad s
R R X X
X J kgm i A
Wb i A
ω
ψ
= = =
= Ω = Ω = = Ω
= Ω = =
= =
Los datos magnéticos del motor son los siguientes:
33
6
4
6 4 3 4
/
34.89 , 22.11
1.5 7.65 100.001 2.096 10 /1.5 / 0.0003
6.584 10 / 2.387 10 /m r
m
c
z z
kg m
M kg M kg
B T xl m x S m
m Hkg d mA x m kg B x m Hkg
ργ
ε− −
= =
= =
= == == Ω =
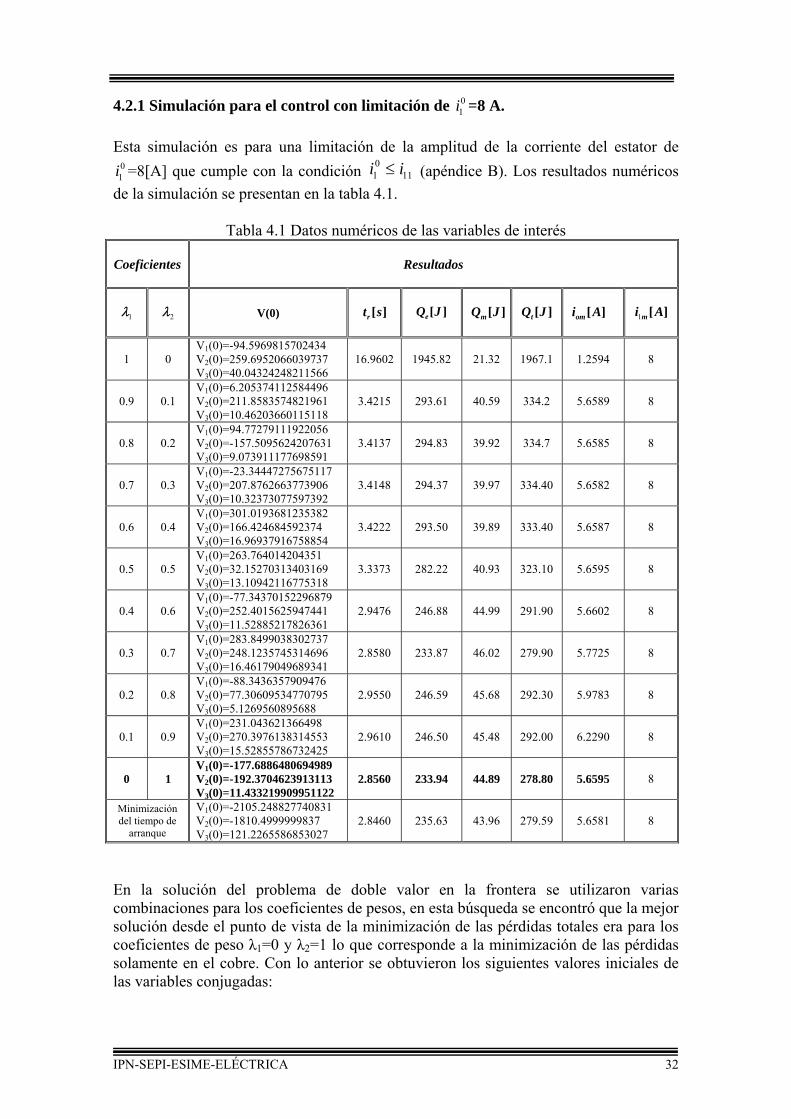
IPN-SEPI-ESIME-ELÉCTRICA 32
4.2.1 Simulación para el control con limitación de 01i =8 A.
Esta simulación es para una limitación de la amplitud de la corriente del estator de
01i =8[A] que cumple con la condición 0
1 11i i≤ (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.1.
Tabla 4.1 Datos numéricos de las variables de interés
Coeficientes
Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J
[ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1(0)=-94.5969815702434 V2(0)=259.6952066039737 V3(0)=40.04324248211566
16.9602 1945.82 21.32 1967.1
1.2594
8
0.9 0.1 V1(0)=6.205374112584496 V2(0)=211.8583574821961 V3(0)=10.46203660115118
3.4215 293.61 40.59 334.2 5.6589 8
0.8 0.2 V1(0)=94.77279111922056 V2(0)=-157.5095624207631 V3(0)=9.073911177698591
3.4137 294.83 39.92 334.7 5.6585 8
0.7 0.3 V1(0)=-23.34447275675117 V2(0)=207.8762663773906 V3(0)=10.32373077597392
3.4148 294.37 39.97 334.40 5.6582 8
0.6 0.4 V1(0)=301.0193681235382 V2(0)=166.424684592374 V3(0)=16.96937916758854
3.4222 293.50 39.89 333.40 5.6587 8
0.5 0.5 V1(0)=263.764014204351 V2(0)=32.15270313403169 V3(0)=13.10942116775318
3.3373 282.22 40.93 323.10 5.6595 8
0.4 0.6 V1(0)=-77.34370152296879 V2(0)=252.4015625947441 V3(0)=11.52885217826361
2.9476 246.88 44.99 291.90 5.6602 8
0.3 0.7 V1(0)=283.8499038302737 V2(0)=248.1235745314696 V3(0)=16.46179049689341
2.8580 233.87 46.02 279.90 5.7725 8
0.2 0.8 V1(0)=-88.3436357909476 V2(0)=77.30609534770795 V3(0)=5.1269560895688
2.9550 246.59 45.68 292.30 5.9783 8
0.1 0.9 V1(0)=231.043621366498 V2(0)=270.3976138314553 V3(0)=15.52855786732425
2.9610 246.50 45.48 292.00 6.2290 8
0 1 V1(0)=-177.6886480694989 V2(0)=-192.3704623913113 V3(0)=11.433219909951122
2.8560 233.94 44.89 278.80 5.6595 8
Minimización del tiempo de
arranque V1(0)=-2105.248827740831 V2(0)=-1810.4999999837 V3(0)=121.2265586853027
2.8460 235.63 43.96 279.59 5.6581 8
En la solución del problema de doble valor en la frontera se utilizaron varias combinaciones para los coeficientes de pesos, en esta búsqueda se encontró que la mejor solución desde el punto de vista de la minimización de las pérdidas totales era para los coeficientes de peso λ1=0 y λ2=1 lo que corresponde a la minimización de las pérdidas solamente en el cobre. Con lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
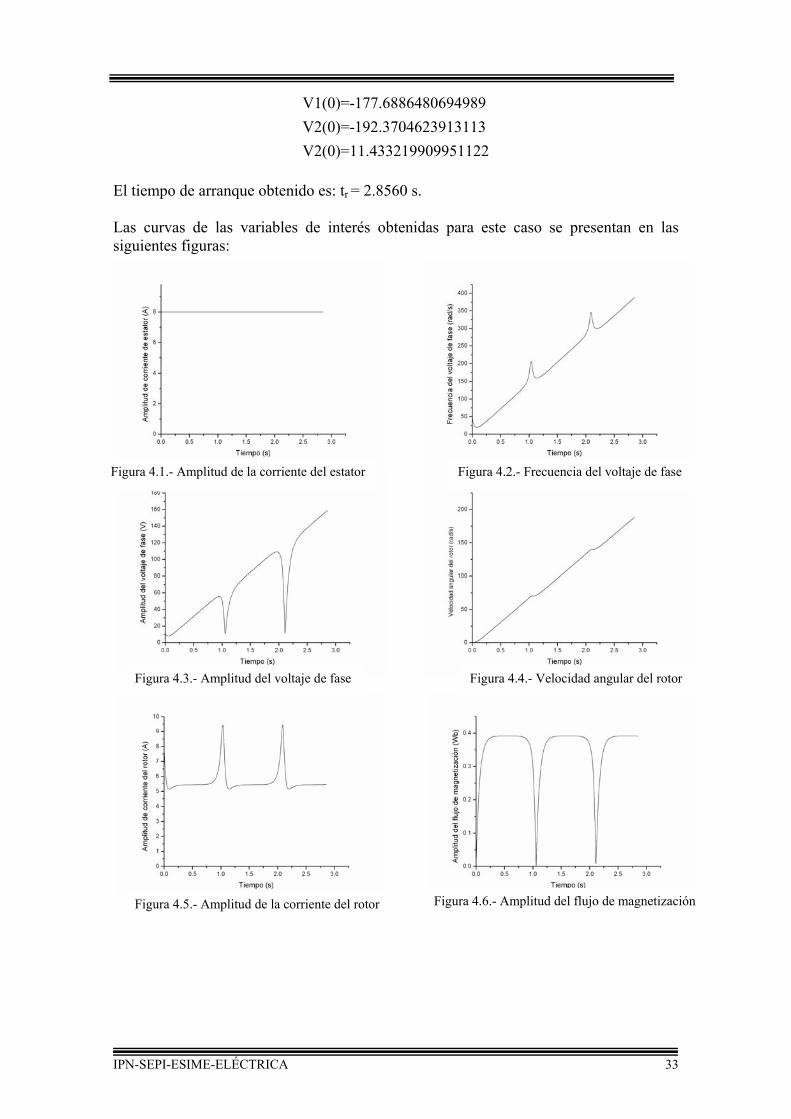
IPN-SEPI-ESIME-ELÉCTRICA 33
V1(0)=-177.6886480694989V2(0)=-192.3704623913113V2(0)=11.433219909951122
El tiempo de arranque obtenido es: tr = 2.8560 s. Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:
Figura 4.1.- Amplitud de la corriente del estator Figura 4.2.- Frecuencia del voltaje de fase
Figura 4.3.- Amplitud del voltaje de fase Figura 4.4.- Velocidad angular del rotor
Figura 4.5.- Amplitud de la corriente del rotor Figura 4.6.- Amplitud del flujo de magnetización

IPN-SEPI-ESIME-ELÉCTRICA 34
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo que minimiza las pérdidas totales mantiene la amplitud de la corriente del estator al valor límite por todo el tiempo de arranque (ver la figura 4.1). La minimización solamente de las pérdidas magnéticas (λ1=1, λ2=0), es el peor caso desde el punto de vista de la minimización de las pérdidas totales, puesto que minimizando las pérdidas en el hierro se aumentan mucho las pérdidas en el cobre. - La mejor combinación de λ1 y λ2 para la cual se minimizan las pérdidas totales es λ1=0 y λ2=1 lo que corresponde a la minimización de las pérdidas en el cobre. Se puede observar en la tabla 4.1 que los valores de las variables de interés obtenidos para este caso están muy cercanos a los valores en la minimización del tiempo de arranque. En la minimización de las pérdidas totales se aumenta el tiempo de control comparado con el control óptimo en tiempo.
Figura 4.8.- Pérdidas eléctricas Figura 4.7.- Amplitud de la corriente de magnetización
Figura 4.9.- Pérdidas magnéticas Figura 4.10.- Pérdidas totales
Figura 4.11.- Par electromagnético Figura 4.12.- Par vs Velocidad

IPN-SEPI-ESIME-ELÉCTRICA 35
4.2.2 Simulación para el control con limitación de 01i =25 A.
Esta simulación es para una limitación de amplitud de la corriente del estator de
01i =25[A] que cumple con la condición 0
1 11i i> (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.2.
Tabla 4.2 Datos numéricos de las variables de interés.
Coeficientes
Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J
[ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1=-253.351733707816 V2=-299.4163960605869 V3=18.35158411278678
1.7505 1948.2 21.31 1969.48 4.4197 25
0.9 0.1 V1=217.2295472235725 V2=251.0925444686028 V3=9.107970914462044
0.9861 1086.5 23.32 1109.79 6.6807 25
0.8 0.2 V1=164.0550416278057 V2=186.2898409841931 V3=6.812202904536036
0.9867 1087.3 23.31 1110.62 6.6806 25
0.7 0.3 V1=230.0742862444896 V2=-43.21931977860299 V3=6.423117714533248
0.9864 1086.9 23.31 1110.21 6.6807 25
0.6 0.4 V1=-299.2938667738595 V2=-177.207578890627 V3=9.534171261029371
0.9853 1085.3 23.33 1108.65 6.6807 25
0.5 0.5 V1=-228.4413753393241 V2=273.0436863155528 V3=9.756089151514743
0.9851 1085.0 23.34 1108.37 6.6808 25
0.4 0.6 V1=-187.783211581597 V2=-271.5378384939154 V3=9.046098629468418
0.9849 1084.7 23.34 1108.09 6.6807 25
0.3 0.7 V1=299.3017106480686 V2=242.4772607984255 V3=10.55145627243343
0.9847 1084.4 23.34 1107.79 6.6805 25
0.2 0.8 V1=241.9876050692819 V2=274.2187454947036 V3=10.01590519127603
0.9845 1084.1 23.34 1107.50 6.6807 25
0.1 0.9 V1=-100.8659326910444 V2=-224.2882347130483 V3=6.7343128230792
0.9844 1084.0 23.35 1107.35 6.6807 25
0 1 V1=139.1601552910644 V2=217.2729482145926 V3=7.063294078313504
0.9843 1083.7 23.35 1107.05 6.6807 25
Minimización del tiempo de
arranque V1=18649.55028142588 V2=19779.35834465332 V3=748.6868133925233
0.9843 1083.7 23.35 1107.05 6.6800 25
En la solución del problema de doble valor en la frontera se utilizaron varias combinaciones para los coeficientes de pesos, en esta búsqueda se encontró que la mejor solución era para la combinación λ1=0 y λ2=1 lo que corresponde a la minimización de las pérdidas en el cobre. Con lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
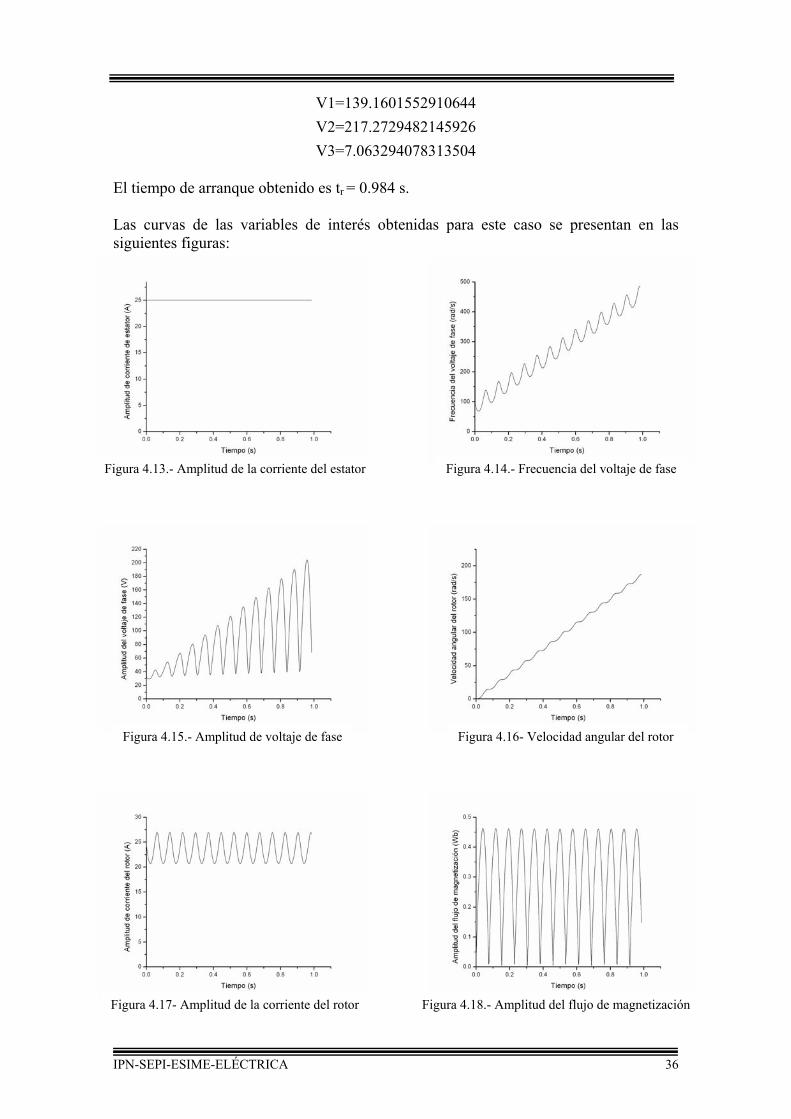
IPN-SEPI-ESIME-ELÉCTRICA 36
V1=139.1601552910644V2=217.2729482145926V3=7.063294078313504
El tiempo de arranque obtenido es tr = 0.984 s.
Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:
Figura 4.13.- Amplitud de la corriente del estator Figura 4.14.- Frecuencia del voltaje de fase
Figura 4.15.- Amplitud de voltaje de fase Figura 4.16- Velocidad angular del rotor
Figura 4.17- Amplitud de la corriente del rotor Figura 4.18.- Amplitud del flujo de magnetización

IPN-SEPI-ESIME-ELÉCTRICA 37
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo que minimiza las pérdidas totales mantiene la amplitud de la corriente del estator al valor límite por todo el tiempo de arranque (ver la figura 4.11).
Figura 4.19- Amplitud de la corriente de magnetización Figura 4.20.- Pérdidas magnéticas
Figura 4.21.- Pérdidas eléctricas Figura 4.22.- Pérdidas totales
Figura 4.23.- Par electromagnético Figura 4.24.- Par vs velocidad

IPN-SEPI-ESIME-ELÉCTRICA 38
- El control óptimo garantiza no solamente la minimización de las pérdidas totales limitando la amplitud de la corriente del estator, también limita la amplitud de la corriente de magnetización – no ocurre la saturación (ver las figuras 4.16 y 4.17). - La minimización solamente de las pérdidas magnéticas, es el peor caso desde el punto de vista económico, por que se aumentan las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes. - La mejor combinación de λ1 y λ2 en el que se minimizan las pérdidas totales es λ1=0 y λ2=1, lo que corresponde a la minimización de las pérdidas en el cobre. Se puede observar en la tabla 4.2 que los valores de las variables de interés obtenidos para este caso son iguales a los obtenidos minimizando el tiempo de arranque (ver el apéndice C). - En este caso, la minimización del tiempo de control garantiza la minimización de las pérdidas en el cobre y la minimización de las pérdidas totales o la minimización de las pérdidas eléctricas garantizan la minimización del tiempo de control.
4.3 SIMULACIÓN PARA EL MOTOR DE 500 H.P.
Los datos eléctricos de este motor son [4]:
' '1 2 1 2
2max
max
1877.94 , 2, 377 /
0.262 , 0.187 , 1.206
54.02 , 11.06 34
4.8718
,, 132.37
m n
o o
o b
u V p rad s
R R X X
X J kgm i A
Wb i A
ω
ψ
= = =
= Ω = Ω = = Ω
= Ω = =
= =
Los datos magnéticos son idénticos como para el motor de 3 h.p. con excepción de las masas del motor y del rotor que son las siguientes:
2649.7 , 657.34m rM kg M kg= =
4.3.1 Simulación para el control con limitación de 01i =30 A.
Esta simulación es para una limitación de la amplitud de la corriente del estator de
01i =30[A] que cumple con la condición 0
1 11i i≤ (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.3.

IPN-SEPI-ESIME-ELÉCTRICA 39
Tabla 4.3 Datos numéricos de las variables de interés.
Coeficientes
Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J [ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1(0)=-3.254813055085847 V2(0)=149.0315684948365 V3(0)=261.7002686310641
240.70 143066.91 1456.47 144523.39 1.6533 30
0.9 0.1 V1(0)=273.1524396354406 V2(0)=292.8365752286424 V3(0)=147.3269453039823
48.700 28671.79 3666.59 32338.38 6.81 30
0.8 0.2 V1(0)=-284.182547563805 V2(0)=251.5740038737467 V3(0)=98.20987851289654
32.700 19035.58 5273.38 24308.96 9.99 30
0.7 0.3 V1(0)=199.5587685813543 V2(0)=256.4283585173656 V3(0)=67.76532873824885
24.830 14156.52 6880.98 21037.5 13.02 30
0.6 0.4 V1(0)=-71.71271427621221 V2(0)=215.7420719110776 V3(0)=41.60112208314024
20.090 11185.96 8483.40 19669.35 15.87 30
0.5 0.5 V1(0)=110.4700338383128 V2(0)=-284.1931606781001 V3(0)=50.39565748898019
15.780 8410.37 10724.9 19135.27 19.25 30
0.4 0.6 V1(0)=-183.4183928491021 V2(0)=-242.3648981376475 V3(0)=49.2702461334023
14.150 7330.77 11932.85 19263.62 20.61 30
0.3 0.7 V1(0)=53.65591806576044 V2(0)=-284.4002053212395 V3(0)=46.687363434476675
13.300 6759.31 12686.89 19446.2 21.07 30
0.2 0.8 V1(0)=260.8111048584694 V2(0)=-295.0458966137342 V3(0)=63.34656722662055
13.280 6733.11 12633.54 19366.66 20.99 30
0.1 0.9 V1(0)=229.6360215575366 V2(0)=-234.8760723892473 V3(0)=52.74341336312568
12.440 6139.94 13523.72 19663.66 21.19 30
0 1 V1(0)=-2.084929083048837 V2(0)=0.9650259873863849 V3(0)=10.349050632153538
51.140 5202.87 14760.86 19963.73 13.88 16.1075
Minimización del tiempo de
arranque V1(0)=241.1067639027358 V2(0)=819.7109564099353 V3(0)=137.034713778638
11.612 5586.15 13837.19 19423.24 21.23 30
En la solución del problema de doble valor en la frontera se utilizaron varias combinaciones para los coeficientes de pesos, en esta búsqueda se encontró que la mejor solución era para la combinación λ1=0.5 y λ2=0.5. Con lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
V1(0)=110.4700338383128V2(0)=-284.1931606781001V3(0)=50.39565748898019
El tiempo de arranque obtenido es tr = 15.78 s Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:
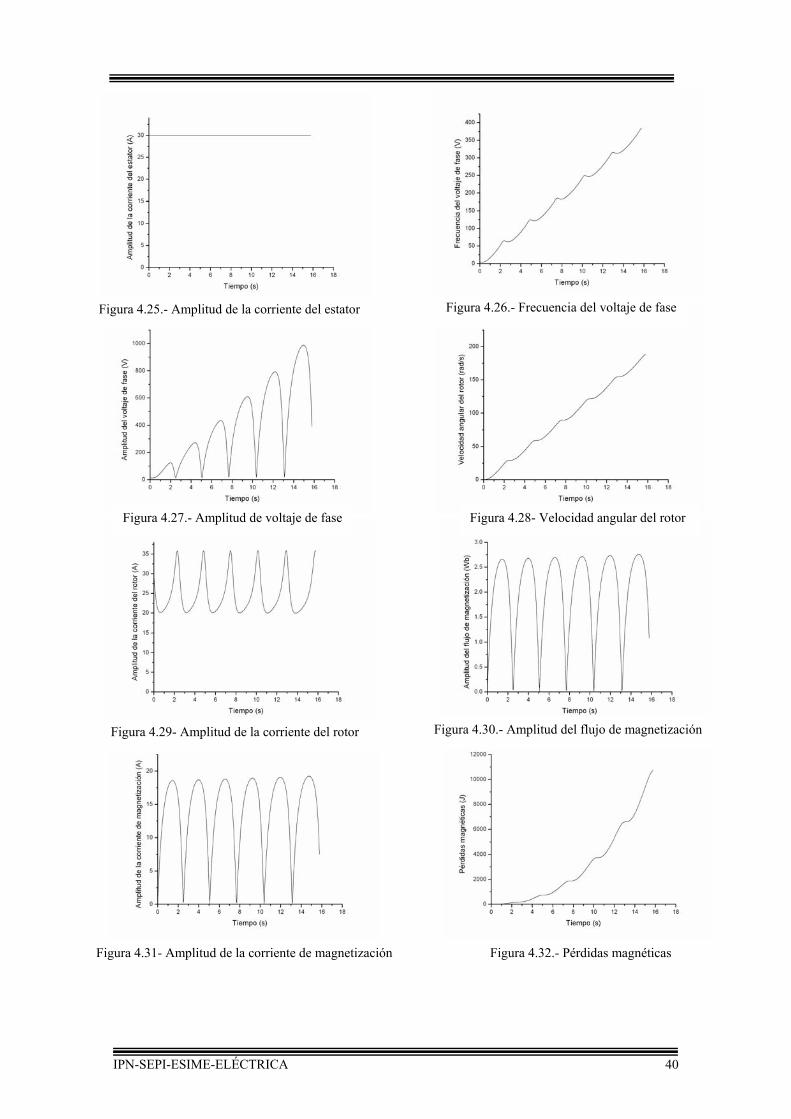
IPN-SEPI-ESIME-ELÉCTRICA 40
Figura 4.25.- Amplitud de la corriente del estator Figura 4.26.- Frecuencia del voltaje de fase
Figura 4.27.- Amplitud de voltaje de fase Figura 4.28- Velocidad angular del rotor
Figura 4.29- Amplitud de la corriente del rotor Figura 4.30.- Amplitud del flujo de magnetización
Figura 4.31- Amplitud de la corriente de magnetización Figura 4.32.- Pérdidas magnéticas

IPN-SEPI-ESIME-ELÉCTRICA 41
Figura 4.33.- Pérdidas eléctricas
Figura 4.35.- Par electromagnético
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo que minimiza las pérdidas totales mantiene la amplitud de la corriente del estator al valor límite por todo el tiempo de arranque (ver la figura 4.21). - La minimización solamente de las pérdidas magnéticas, es el peor caso desde el punto de vista de minimización de las pérdidas totales, puesto que minimizando las pérdidas magnéticas se aumentan mucho las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes. - La mejor combinación de λ1 y λ2 en el que se minimizan las pérdidas totales es λ1=0.5 y λ2=0.5. 4.3.2 Simulación para el control con limitación de 0
1i =150 A. Esta simulación es para una limitación de amplitud de corriente del estator de
01i =150[A] que cumple con la condición 0
1 11i i> (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.4.
Figura 4.34.- Pérdidas totales
Figura 4.36.- Par vs velocidad
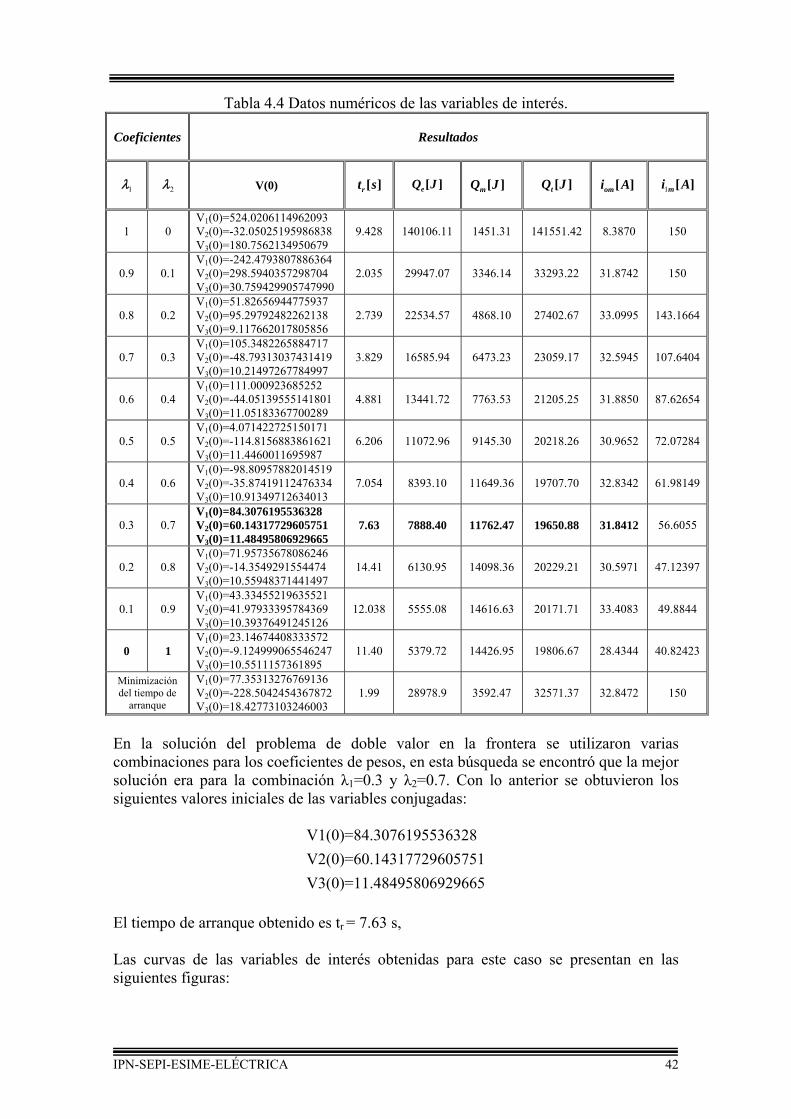
IPN-SEPI-ESIME-ELÉCTRICA 42
Tabla 4.4 Datos numéricos de las variables de interés.
Coeficientes
Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J [ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1(0)=524.0206114962093 V2(0)=-32.05025195986838 V3(0)=180.7562134950679
9.428 140106.11 1451.31 141551.42 8.3870 150
0.9 0.1 V1(0)=-242.4793807886364 V2(0)=298.5940357298704 V3(0)=30.759429905747990
2.035 29947.07 3346.14 33293.22 31.8742 150
0.8 0.2 V1(0)=51.82656944775937 V2(0)=95.29792482262138 V3(0)=9.117662017805856
2.739 22534.57 4868.10 27402.67 33.0995 143.1664
0.7 0.3 V1(0)=105.3482265884717 V2(0)=-48.79313037431419 V3(0)=10.21497267784997
3.829 16585.94 6473.23 23059.17 32.5945 107.6404
0.6 0.4 V1(0)=111.000923685252 V2(0)=-44.05139555141801 V3(0)=11.05183367700289
4.881 13441.72 7763.53 21205.25 31.8850 87.62654
0.5 0.5 V1(0)=4.071422725150171 V2(0)=-114.8156883861621 V3(0)=11.4460011695987
6.206 11072.96 9145.30 20218.26 30.9652 72.07284
0.4 0.6 V1(0)=-98.80957882014519 V2(0)=-35.87419112476334 V3(0)=10.91349712634013
7.054 8393.10 11649.36 19707.70 32.8342 61.98149
0.3 0.7 V1(0)=84.3076195536328 V2(0)=60.14317729605751 V3(0)=11.48495806929665
7.63 7888.40 11762.47 19650.88 31.8412 56.6055
0.2 0.8 V1(0)=71.95735678086246 V2(0)=-14.3549291554474 V3(0)=10.55948371441497
14.41 6130.95 14098.36 20229.21 30.5971 47.12397
0.1 0.9 V1(0)=43.33455219635521 V2(0)=41.97933395784369 V3(0)=10.39376491245126
12.038 5555.08 14616.63 20171.71 33.4083 49.8844
0 1 V1(0)=23.14674408333572 V2(0)=-9.124999065546247 V3(0)=10.5511157361895
11.40 5379.72 14426.95 19806.67 28.4344 40.82423
Minimización del tiempo de
arranque V1(0)=77.35313276769136 V2(0)=-228.5042454367872 V3(0)=18.42773103246003
1.99 28978.9 3592.47 32571.37 32.8472 150
En la solución del problema de doble valor en la frontera se utilizaron varias combinaciones para los coeficientes de pesos, en esta búsqueda se encontró que la mejor solución era para la combinación λ1=0.3 y λ2=0.7. Con lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
V1(0)=84.3076195536328V2(0)=60.14317729605751V3(0)=11.48495806929665
El tiempo de arranque obtenido es tr = 7.63 s, Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:

IPN-SEPI-ESIME-ELÉCTRICA 43
Figura 4.37.- Amplitud de la corriente del estator Figura 4.38.- Frecuencia de voltaje de fase
Figura 4.39.- Amplitud del voltaje de fase Figura 4.40.- Velocidad Angular del rotor
Figura 4.41.- Amplitud de la corriente del rotor Figura 4.42.- Amplitud del flujo de magnetización.
Figura 4.43.- Amplitud de la corriente de magnetización Figura 4.44.- Pérdidas eléctricas

IPN-SEPI-ESIME-ELÉCTRICA 44
Figura 4.45.- Pérdidas magnéticas Figura 4.46.- Pérdidas totales
Figura 4.47.- Par electromagnético Figura 4.48.- Par vs velocidad
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo que minimiza las pérdidas totales mantiene la amplitud de la corriente del estator por debajo del valor límite por todo el tiempo de arranque (figura 4.31). El control óptimo garantiza no solamente la minimización de las pérdidas totales limitando la amplitud de la corriente del estator, también limita la amplitud de la corriente de magnetización – no ocurre la saturación (figuras 4.36 y 4.37). La minimización solamente de las pérdidas magnéticas, es el peor caso desde el punto de vista de minimización de las pérdidas totales, puesto que minimizando las pérdidas magnéticas se aumentan mucho las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes. La mejor combinación de λ1 y λ2 en el que se minimizan las pérdidas totales es λ1=0.3 y λ2=0.7. Sin embargo las pérdidas totales obtenidas para la minimización solamente de las pérdidas eléctricas (para los coeficientes del peso 1 20, 1λ λ= = ) son solamente poco mayores que las obtenidas para el caso óptimo (para los valores de los coeficientes del peso
1 20.3, 0.7λ λ= = , 19806.7J contra 19650.9J, es decir solamente 0.8% más grandes). Sin embargo la optimización multicriterial garantiza no solamente el mínimo de las pérdidas totales, pero también acorta el tiempo de control. En el caso analizado, el tiempo de arranque para la minimización solamente de las pérdidas eléctricas ( 1 20, 1λ λ= = ), tiene el valor de 11.40 segundos y para la optimización multicriterial con los coeficientes
1 20.3, 0.7λ λ= = es de 7.63 segundos, entonces 32.4% más corto.
4.4 SIMULACIÓN PARA EL MOTOR DE 2250 H.P. Los datos eléctricos de este motor son [4]:

IPN-SEPI-ESIME-ELÉCTRICA 45
' '1 2 1 2
2max
max
1877.94 , 2, 377 /
0.029 , 0.022 , 0.226
13.04 , 63.87 141.56,4.984 , 159.54
m n
o o
o b
u V p rad s
R R X X
X J kgm i A
Wb i A
ω
ψ
= = =
= Ω = Ω = = Ω
= Ω = =
= =
Los datos magnéticos del motor son los mismos que para el motor de 3 h.p. excepto las masas del motor y del rotor que son las siguientes:
8479 , 1315m rM kg M kg= = 4.4.1 Simulación para el control con limitación de 0
1i =150A. Esta simulación es para una limitación de la amplitud de la corriente del estator de
01i =150[A] que cumple con la condición 0
1 11i i≤ (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.5.
Tabla 4.5 Datos numéricos de las variables de interés.
Coeficientes Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J [ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1(0)=-5.765543974654944 V2(0)=181.3958085824266 V3(0)=257.8661788563887
329.5 558448.06 4778.64 563226.7097 5.9346 150
0.9 0.1 V1(0)=195.2225386202158 V2(0)=-179.3125166871317 V3(0)=73.51549384927557
62.5 104766.5 13268.7 118035.3 25.7696 150
0.8 0.2 V1(0)=-297.8788571156124 V2(0)=-279.2083884139851 V3(0)=77.70538217589788
41.7 69467.0 19192.6 88659.6 38.0712 150
0.7 0.3 V1(0)=239.8219501295829 V2(0)=-256.7473516220686 V3(0)=54.08593077298146
32.5 53628.8 24403.4 78031.2 48.8005 150
0.6 0.4 V1(0)=-260.0545789392876 V2(0)=260.3442048237037 V3(0)=46.4926990670815
25.3 41028.7 31188.2 72216.9 62.2590 150
0.5 0.5 V1(0)=284.0150340636716 V2(0)=-288.319172501346 V3(0)=44.65349701947562
20.8 32956.5 37859.5 70816.0 74.4627 150
0.4 0.6 V1(0)=-293.7014874610556 V2(0)=204.7329572568053 V3(0)=36.82245272379015
19.3 26378.3 46374.3 72752.6 85.5313 150
0.3 0.7 V1(0)=294.6188094433558 V2(0)=-255.807274541987 V3(0)=36.54615801683354
14.2 18759.7 59638.5 78398.2 102.0986 150
0.2 0.8 V1(0)=149.4460084428186 V2(0)=171.3659520276191 V3(0)=27.93572203867865
26.6 16329.1 69999.6 86328.7 100.9209 150
0.1 0.9 V1(0)=99.49876022081671 V2(0)=-173.3980591885061 V3(0)=28.13336674985418
19.3 14840.1 70859.2 85699.3 104.5685 150
0 1 V1(0)=68.28763938318039 V2(0)=-84.41882727655315 V3(0)=28.15546592678026
18.7 14606.2 70134.2 84740.4 104.7597 149.7986
Minimización del tiempo de
arranque V1(0)=-260.5085191909898 V2(0)=127.2876577524805 V3(0)=26.17578526435517
11.69 16063.6 63430.8 79494.4 105.6293 150
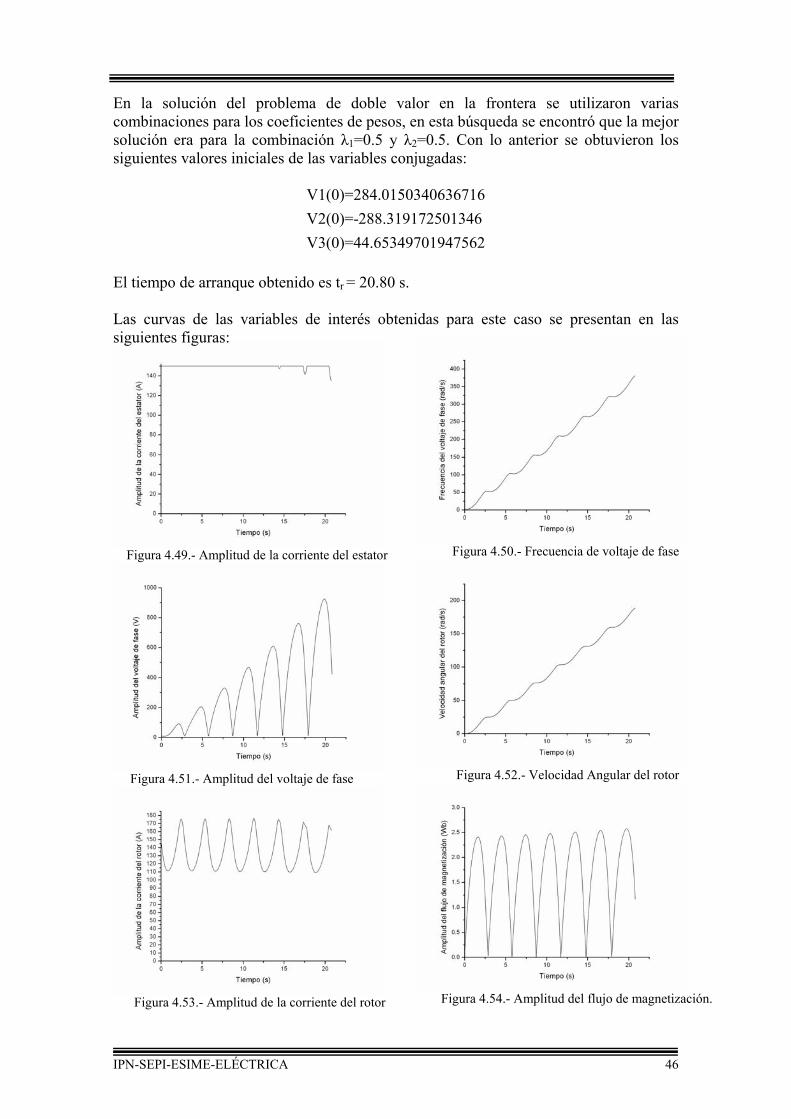
IPN-SEPI-ESIME-ELÉCTRICA 46
Figura 4.49.- Amplitud de la corriente del estator Figura 4.50.- Frecuencia de voltaje de fase
Figura 4.51.- Amplitud del voltaje de fase Figura 4.52.- Velocidad Angular del rotor
Figura 4.53.- Amplitud de la corriente del rotor Figura 4.54.- Amplitud del flujo de magnetización.
En la solución del problema de doble valor en la frontera se utilizaron varias combinaciones para los coeficientes de pesos, en esta búsqueda se encontró que la mejor solución era para la combinación λ1=0.5 y λ2=0.5. Con lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
V1(0)=284.0150340636716V2(0)=-288.319172501346V3(0)=44.65349701947562
El tiempo de arranque obtenido es tr = 20.80 s. Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:
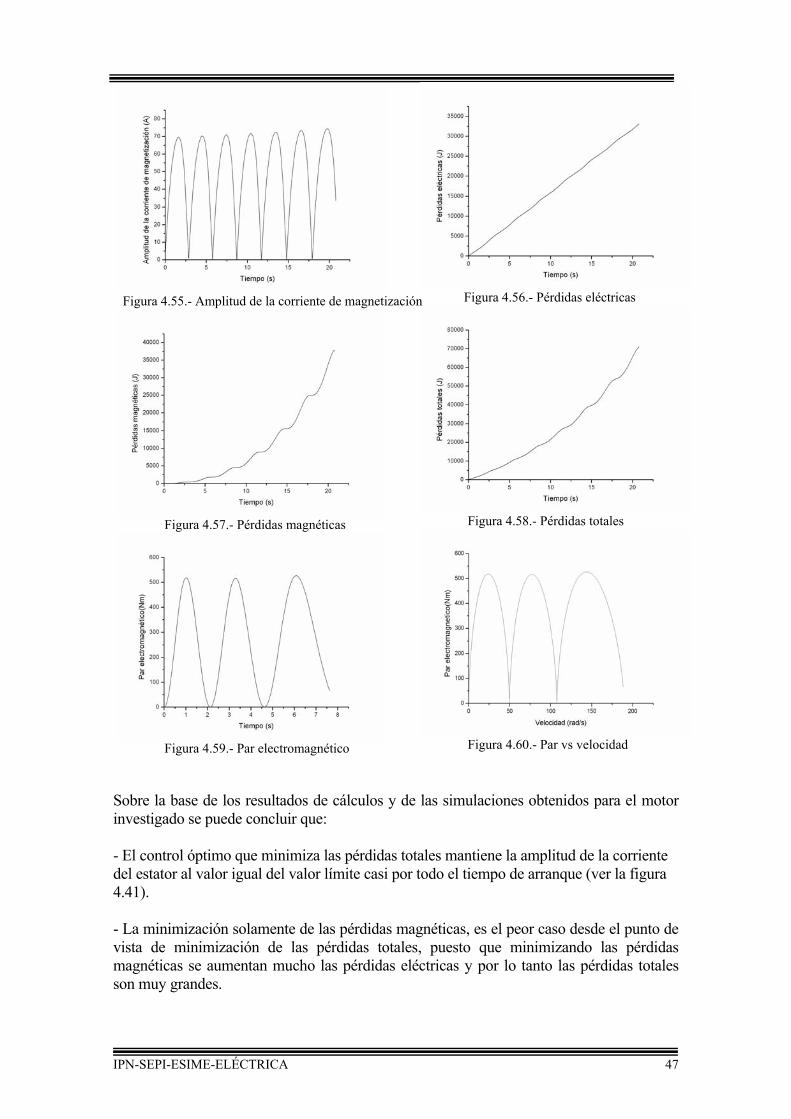
IPN-SEPI-ESIME-ELÉCTRICA 47
Figura 4.55.- Amplitud de la corriente de magnetización Figura 4.56.- Pérdidas eléctricas
Figura 4.57.- Pérdidas magnéticas Figura 4.58.- Pérdidas totales
Figura 4.59.- Par electromagnético Figura 4.60.- Par vs velocidad
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo que minimiza las pérdidas totales mantiene la amplitud de la corriente del estator al valor igual del valor límite casi por todo el tiempo de arranque (ver la figura 4.41). - La minimización solamente de las pérdidas magnéticas, es el peor caso desde el punto de vista de minimización de las pérdidas totales, puesto que minimizando las pérdidas magnéticas se aumentan mucho las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes.
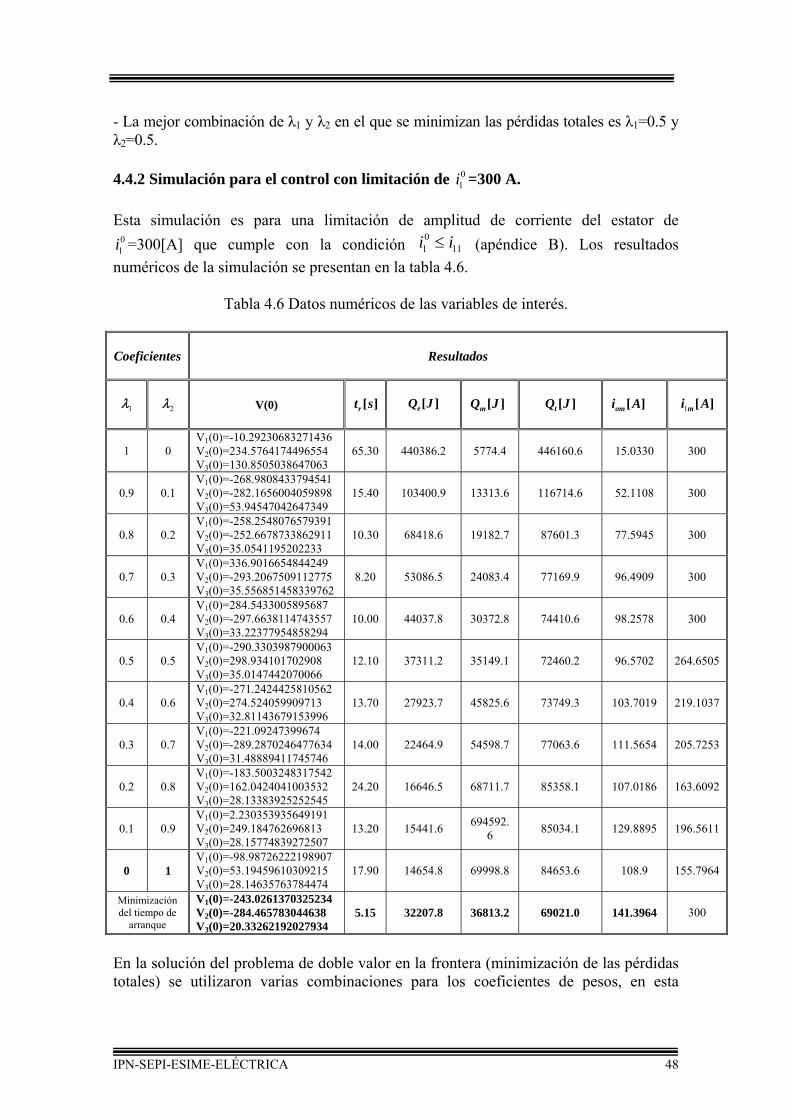
IPN-SEPI-ESIME-ELÉCTRICA 48
- La mejor combinación de λ1 y λ2 en el que se minimizan las pérdidas totales es λ1=0.5 y λ2=0.5. 4.4.2 Simulación para el control con limitación de 0
1i =300 A. Esta simulación es para una limitación de amplitud de corriente del estator de
01i =300[A] que cumple con la condición 0
1 11i i≤ (apéndice B). Los resultados numéricos de la simulación se presentan en la tabla 4.6.
Tabla 4.6 Datos numéricos de las variables de interés.
Coeficientes
Resultados
1λ 2λ
V(0)
[ ]rt s
[ ]eQ J
[ ]mQ J [ ]tQ J
[ ]omi A 1 [ ]mi A
1 0 V1(0)=-10.29230683271436 V2(0)=234.5764174496554 V3(0)=130.8505038647063
65.30 440386.2 5774.4 446160.6 15.0330 300
0.9 0.1 V1(0)=-268.9808433794541 V2(0)=-282.1656004059898 V3(0)=53.94547042647349
15.40 103400.9 13313.6 116714.6 52.1108 300
0.8 0.2 V1(0)=-258.2548076579391 V2(0)=-252.6678733862911 V3(0)=35.0541195202233
10.30 68418.6 19182.7 87601.3 77.5945 300
0.7 0.3 V1(0)=336.9016654844249 V2(0)=-293.2067509112775 V3(0)=35.556851458339762
8.20 53086.5 24083.4 77169.9 96.4909 300
0.6 0.4 V1(0)=284.5433005895687 V2(0)=-297.6638114743557 V3(0)=33.22377954858294
10.00 44037.8 30372.8 74410.6 98.2578 300
0.5 0.5 V1(0)=-290.3303987900063 V2(0)=298.934101702908 V3(0)=35.0147442070066
12.10 37311.2 35149.1 72460.2 96.5702 264.6505
0.4 0.6 V1(0)=-271.2424425810562 V2(0)=274.524059909713 V3(0)=32.81143679153996
13.70 27923.7 45825.6 73749.3 103.7019 219.1037
0.3 0.7 V1(0)=-221.09247399674 V2(0)=-289.2870246477634 V3(0)=31.48889411745746
14.00 22464.9 54598.7 77063.6 111.5654 205.7253
0.2 0.8 V1(0)=-183.5003248317542 V2(0)=162.0424041003532 V3(0)=28.13383925252545
24.20 16646.5 68711.7 85358.1 107.0186 163.6092
0.1 0.9 V1(0)=2.230353935649191 V2(0)=249.184762696813 V3(0)=28.15774839272507
13.20 15441.6 694592.6 85034.1 129.8895 196.5611
0 1 V1(0)=-98.98726222198907 V2(0)=53.19459610309215 V3(0)=28.14635763784474
17.90 14654.8 69998.8 84653.6 108.9 155.7964
Minimización del tiempo de
arranque V1(0)=-243.0261370325234 V2(0)=-284.465783044638 V3(0)=20.33262192027934
5.15 32207.8 36813.2 69021.0 141.3964 300
En la solución del problema de doble valor en la frontera (minimización de las pérdidas totales) se utilizaron varias combinaciones para los coeficientes de pesos, en esta

IPN-SEPI-ESIME-ELÉCTRICA 49
Figura 4.61.- Amplitud de la corriente del estator
Figura 4.63.- Amplitud del voltaje de fase Figura 4.64.- Velocidad Angular del rotor
Figura 4.65.- Amplitud de la corriente del rotor Figura 4.66.- Amplitud del flujo de magnetización.
búsqueda se encontró que la mejor solución era para la combinación lineal λ1=0.5 y λ2=0.5. Sin embargo se encontró que el control óptimo en tiempo (ver apéndice C), es el caso donde se tiene el menor valor de las pérdidas totales (alrededor de 4.7% menos) obteniendo además el tiempo de arranque más que dos veces más corto. De lo anterior se obtuvieron los siguientes valores iniciales de las variables conjugadas:
202793420.3326219(0)V3044638-284.46578(0)V70325234-243.02613(0)V
3
2
1
===
El tiempo de arranque obtenido es tr = 5.15 s. Las curvas de las variables de interés obtenidas para este caso se presentan en las siguientes figuras:
Figura 4.62.- Frecuencia de voltaje de fase

IPN-SEPI-ESIME-ELÉCTRICA 50
Figura 4.67.- Amplitud de la corriente de magnetización Figura 4.68.- Pérdidas eléctricas
Figura 4.69.- Pérdidas magnéticas Figura 4.70.- Pérdidas totales
Figura 4.71 Par electromagnético Figura 4.72- Par vs velocidad
Sobre la base de los resultados de cálculos y de las simulaciones obtenidos para el motor investigado se puede concluir que: - El control óptimo en tiempo que también minimiza las pérdidas totales mantiene la amplitud de la corriente del estator al valor límite por todo el tiempo de arranque (ver la figura 4.51). - El control óptimo garantiza no solamente la minimización del tiempo y de las pérdidas totales limitando la amplitud de la corriente del estator, también limita la amplitud de la corriente de magnetización – no ocurre la saturación (ver las figuras 4.56 y 4.57).

IPN-SEPI-ESIME-ELÉCTRICA 51
- La minimización solamente de las pérdidas magnéticas, es el peor caso desde el punto de vista de minimización de las pérdidas totales, puesto que minimizando las pérdidas magnéticas se aumentan mucho las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes.
IPN-SEPI-ESIME-ELÉCTRICA 52
CAPITULO 5
CONCLUSIONES Y SUGERENCIAS 5.1 Conclusiones de la tesis En este trabajo se diseña el control en frecuencia óptimo de velocidad de motores de inducción que minimiza las pérdidas de energía eléctrica durante el tiempo de control y limita la amplitud de la corriente del estator al valor deseado. También se simula el sistema de control óptimo diseñado para el caso del arranque en vacío de tres motores de inducción de diferentes potencias (3 hp, 500 hp y 2250 hp). Basándose en los resultados obtenidos se puede concluir que:
1. El valor mínimo de las pérdidas de energía eléctrica obtenido con el control óptimo diseñado utilizando el índice de optimización en forma de la suma de las pérdidas magnéticas y eléctricas multiplicadas por sus coeficientes de peso correspondientes 1 2 1 2 1 2, ( 0, 0, 1)λ λ λ λ λ λ≥ ≥ + = depende mucho de los valores de dichos coeficientes de peso.
2. La combinación de los valores de los coeficientes de peso 1 21, 0λ λ= = , lo que corresponde a la minimización solamente de las pérdidas magnéticas, da los resultados peores desde el punto de vista de la minimización de las pérdidas totales de la energía eléctrica, independientemente de la potencia del motor y del valor límite de la amplitud de la corriente del estator aceptado para el diseño del control óptimo. Esto se justifica por el hecho de que minimizando solamente las pérdidas magnéticas se aumentan mucho las pérdidas eléctricas y por lo tanto las pérdidas totales son muy grandes.
3. Para la limitación de la amplitud de la corriente de estator que cumple la condición 0
1 11i i≤ (ver el apéndice B) el mínimo de las pérdidas totales se obtiene o para la combinación de los valores de los coeficientes de peso
1 20.5, 0.5λ λ= = para los motores de mediana (500 hp) o alta (2250 hp) potencia o para la combinación 1 20, 1λ λ= = lo que corresponde a la minimización solamente de las pérdidas eléctricas, en el caso del motor de baja (3 hp) potencia. Sin embargo en este último caso la minimización de las pérdidas eléctricas da casi los mismos resultados como la minimización del tiempo de control. Lo antes dicho se puede explicar observando que en el caso del motor de baja potencia la masa del núcleo magnético del motor es relativamente pequeña y por esto la participación de las pérdidas magnéticas en las pérdidas totales es relativamente baja.
4. Para la limitación de la amplitud de la corriente del estator que cumple con la condición 0
1 11i i> (ver el apéndice B) el mínimo de las pérdidas totales se obtiene o para minimización del tiempo de control o para minimizar solamente las pérdidas eléctricas ( 1 20, 1λ λ= = ) (de acuerdo con el análisis presentado en el apéndice B realizado en la manera aproximada basándose en el modelo
IPN-SEPI-ESIME-ELÉCTRICA 53
simplificado del motor de inducción que no considera los transitorios electromagnéticos ni la saturación del material magnético) con excepción del motor de mediana potencia (500 hp) para el cual el mínimo de las pérdidas totales se obtuvo para la combinación de los coeficientes de peso
1 20.3, 0.7λ λ= = . Sin embargo en este último caso las pérdidas totales obtenidas para la minimización solamente de las pérdidas eléctricas (para los coeficientes del peso 1 20, 1λ λ= = ) son solamente poco mayores (solamente 0.8% más grandes) que las obtenidas para el caso óptimo (para los valores de los coeficientes del peso
1 20.3, 0.7λ λ= = ).
Se empleó el método de escalarización por coeficientes de peso para resolver el problema de optimización vectorial. Se encuentró el control óptimo en lazo abierto en la forma implícita que minimiza las pérdidas magnéticas, eléctricas y totales utilizando el modelo del motor de inducción alimentado por una fuente de corriente y que toma en consideración la saturación del material magnético Se resolvió el problema de doble valor en la frontera para encontrar el control óptimo en lazo abierto en la forma explicita utilizando el algoritmo híbrido de optimización paramétrica descrito en el apéndice E, para cada una de las diferentes combinaciones de los valores de. Los coeficientes de peso Para la selección del mejor resultado se aplicó el criterio de la suma de las pérdidas magnéticas y eléctricas. Se aplicó el control encontrado a tres motores de diferente capacidad para analizarlo y evaluar su comportamiento. Para realizar esto se realizó un código en el lenguaje de programación Fortran 90, para simular el control óptimo encontrado, aplicándolo al arranque del motor de inducción en vacío 5.2 Sugerencias para trabajos futuros Las recomendaciones para trabajos ulteriores en esta línea de investigación son las siguientes:
1. Los programas digitales desarrollados son la base para modificaciones y extensiones de trabajos en esta línea de investigación. Se puede, por ejemplo, incluir la variación de carga del motor de inducción en el diseño del control óptimo que minimiza simultáneamente las pérdidas eléctricas y magnéticas.
2. Para poder verificar los resultados obtenidos en este trabajo es recomendable diseñar el control óptimo que minimiza simultáneamente las pérdidas eléctricas y magnéticas utilizando otro índice de optimización multicriterial que el aplicado en este trabajo u otro método de la búsqueda del mínimo de las pérdidas totales como, por ejemplo el índice de la función de distancia o el método de aplicación del algoritmo genético que contempla dos poblaciones de
IPN-SEPI-ESIME-ELÉCTRICA 54
cromosomas: una relacionada con la minimización de las pérdidas eléctricas y otra con las pérdidas magnéticas.
3. Realizando la extensión del diseño del control óptimo multicriterial se pueden minimizar simultáneamente las pérdidas totales y el tiempo de control.
4. Se debe hacer una investigación para realizar una implementación física del
control óptimo diseñado en este trabajo y observar el comportamiento real del motor en laboratorio para analizar los resultados obtenidos y poder validar el funcionamiento del control óptimo realizado en esta tesis.
5. Se podría también diseñar un control vectorial (del campo orientado) incluyendo
en el modelo del motor la saturación del hierro para hacer una comparación con el control óptimo.

IPN-SEPI-ESIME-ELÉCTRICA 55
REFERENCIAS [1] P. C. Sen, “Principles of electric Machines and Power electronics”, Editorial John
Wiley and Sons, 2a. Edición, (1997). [2] Bimal K. Bose, “Modern Power Electronics and AC Drives”, Prentice Hall PTR,
(2001). [3] Sakae Yamamura, “AC Motors for High Performance Applications; Analysis and
Control”, Marcel Dekker, Inc (1986). [4] Krause Paul C.,”Análisis of Electric Machinery”,Ed. Mc Graw-Hill International,
1987. [5] Paul C. Krause, Oleg Wasynczuk, Scout D. Sudhoff, “Analysis of Electric
Machinery and Drive Systems”, IEE press and Wiley Intersciencie 2000.. [6] G. O. García, J.C. Mendez Luis, R.M. Stephan y E.H. Watanabe, “An efficiente
controller and adjustable speed induction motor drive”, IEEE Transaction on Industrial Electronic, Vol41, no. 5, pp 533-539, October 1994.
[7] I. Kioskeridis, N. Margaris, “Loss minimization in induction motor adjustable speed drives” IEEE Transactions on Industrial Electronics, Vol 43, no. 1, pp 226-231, February 1996.
[8] R. d. Lorenza, S Yang, “Efficiency Optimized flux trajectories for closed cycle operation of field orientation induction machine drives”, IEEE Transactions on Industry Applications, Vol 28, no. 3, pp 574-580, May/June 1992.
[9] J. Moreno Eguilaz, Miguel Cipolla, Juan Peracaula, Paulo J. da Branco, “Induction Motor Optimum flux Search Algorithms with transient State loss Minimization using a fuzzy logic based supervisor”, Power electronics Specialists conference, 1997, PESC ’97 Record, 28 th Annual IEEE.
[10] R. Bellman, “Dinamic Programing”, Princet, N.J. Princentor University Press 1957.
[11] Amjad Baba, Eduardo Mendes, Adel Razek, “Loss minimization of a field-oriented controlled induction machine by flux optimization accounting for magnetic saturation”, IEEE 1997 MDI.
[12] M. Kostenko, L. Piotrouski, “Machines Electrical”, Tomo I Editions Mic, Moscu, 1979, pp 256-274.
[13] Fitzgerald, A. E.,, “Electric Machinery”, Mc Graw Hill Book Compamy 4a. Edición. (1985).
[14] Leszek Kawecki, Tadeusz Niewierowicz, “Control óptimo en tiempo de velocidad de motores de inducción tomando en consideración transitorios electromagnéticos y saturación del material magnético”, RVP 97 , 13 al 18 de Julio de 1997.
[15] Kovac K.P., Rac J. “Transitory Processes in AC machinery” (en Ruso), Energía, Moscow 1963.
[16] Sandler A.S., Sarbatov R.S., “Frequency control of asynchronous motors”, (en ruso). Energía, Moscú 1966.
[17] Schreiner R.T., Gildebrand A.P., “Frequency time-optimal speed control of induction motors in the closed loop systems”, (en ruso), Energía, Electrichestvo, 10, 1973.
[18] Leszek Kawecki, Lazaro Eduardo Castillo Barrera, “Influencia de la forma escalonado del voltaje de alimentación en las pérdidas magnéticas generadas durante el arranque óptimo en tiempo del motor de inducción”, cientifica, vol. 8 núm 3, pp 107-115, ESIME-IPN ISSN 1665-0654.
[19] Athans M., Falb P.L., “Optimal Contro”l, McGraw-Hill 1966.
IPN-SEPI-ESIME-ELÉCTRICA 56
[20] Tou Y. I. “Modern control Theory”, Ed. Mc Graw Hill International 1975. [21] L.S. Pontryagin and V.G. Boltyansk, “The Mathematic Thoery of Optimal
Processes”, Interscience Publish, John Wiley y Suns, 1967. [22] Pablo Vargas Prudente, “Ahorro de Energía en Motores Eléctricos”, colección de
textos Politecnicos, serie Electrotécnica, LIMUSA Noriega, Editores, México 1997.
[23] Murphy J.M.D., Turnbull F.G., “Power Electronic Control of AC Motors”, Pergamon Press 1988.
[24] Salukwadze M.E., “Problemas de Optimización Vectorial en la Teoría de Control”, (en ruso), Ed. Miecniereba, Tblisi 1975.
[25] Kawecki L., Niewierowicz T., “Algoritmo de optimización paramétrica.”, Memoria de Primer Congreso de Ingenieria Electromecanica y de Sistemas”, SEPI-ESIME-IPN, México D.F., 1991.
[26] L. Kawecki, “Arranque Óptimo en Frecuencia de Motores de Inducción Mediante Sistemas de Control de Retroalimentación que Limitan la Corriente del Estator para Minimizar Simultáneamente Pérdidas de Energía Eléctrica y el Tiempo de Arranque”, Memoria de la Conferencia Internacional IEEE Sección México,Méxicon 80, Oct. 1980, México D.F.
[27] L. Kawecki, “Arranque en Frecuencia, Óptimo en Tiempo de Motores de Inducción con Limitación de la Corriente del Estator”, Acta Mexicana de Ciencia y Tecnología,Vol.V,Nms.18-19,Abril–Sept. 1987.
[28] L. Kawecki, T. Niewierowicz, “Pérdidas Magnéticas durante el Arranque Ordinario de Motores de Inducción”, Memoria de "1er Congreso Internacional de Ingeniería Electromecánica y de Sistemas", S.E.P.I.-E.S.I.M.E.-I.P.N., num. 1, vol. 1, Nov. 11-15 de 1996, México D.F., páginas 42 – 47.
[29] L. Kawecki, “Pérdidas Magnéticas en el Arranque de Motores de Inducción Óptimo para Minimizar las Pérdidas en el Cobre”, Memoria de "4r Congreso Nacional de Ingeniería Electromecánica y de Sistemas" , S.E.P.I.-E.S.I.M.E.-I.P.N., num. 1, vol. 1, Nov. 9-13 de 1998, México D.F., páginas 302-308.
[30] L. Kawecki, T. Niewierowicz,„Pérdidas Magnéticas en el Arranque Óptimo en Tiempo de Motores de Inducción”, Memoria de Conferencia Internacional IEEE Sección México, Capítulo de Potencia, Duodécima Reunión de Verano, num. 1,vol. 2, 11-16 de Julio 1999,Acapulco Gro., México, pág. 105-111
[31] A.S. Sandler,R.S. Sarbatov,“Control en Frecuencia de Motores de Inducción”,Ed. Energía, Moscú 1966.
[32] L. Kawecki, T. Niewierowicz, “Diseño de Controlador de Velocidad de Motores de Inducción que Minimiza las Pérdidas Magnéticas”, Memoria de Noveno Congreso Nacional de Máquinas Rotatorias y Octavo Simposium Internacional de Ingeniería Eléctrica auspiciado por la Asociación Mexicana de Ingenieros Mecánicos y Eléctricos A.C. Sección Veracruz, num. 1, vol. 1, Septiembre 29 – Oct. 1 de 1999, Veracruz Ver. México, páginas 1–15.
[33] L. Kawecki “Controlador Óptimno de Velocidad de Motores de Inducción que Minimiza las Pérdidas Magnéticas y Eléctricas”, Memoria de Conferencia Internacional IEEE Sección México, Capítulo de Potencia, Decimotercera Reunión de Verano, num. 1, vol. 1, 09-14 de Julio 2000, Acapulco Gro., México, páginas 30-36.
[34] Kawecki L. apéndice E, “Algoritmo híbrido de optimización paramétrica.”, Memoria de 5° Conferencia Internacional sobre Simulación por Computadora,

IPN-SEPI-ESIME-ELÉCTRICA 57
Universidad Panamericana, Instituto McLeod de las Ciencia de Simulación, num. 1, vol. 1, febrero 16-18 de 2000, México DF pag. 65-72.
[35] E. Mendes, A. Baba, A. Razek, “Losses Minimization of a field controlled induction Machine”, Electrical Machines and Drives, 11-13 Sepetember 1995, Conference Publication No. 412, IEE, 1995.
[36] H. A. Al-Rashidi, A. Gastli y Al-Badi, “Optimization of variable speed induction motor efficiency using artificial neural networks”
[37] Sheng Ming Yang, Feng Chieh Lin, “Loss Minimization control of vector-controlled induction motor drives”, Power electronics and drive systems, 2001. Proceedings, 2001, 4th IEEE International Conference.
[38] Abdelhakin Haddoun, Mohomed El Hachemi Benbozid, Demba Diallo, Rachid Abdessemed, Damel Ghauili y Kanel Srairi, “A loss Minimization DTC Scheme fror EV Induction Motor”, IEEE Trasaction on Vehicular technology, vol. 56, no. 1, January 2007.
[39] Bogdam Pryymak, Juan M. Moreno-Eguilaz, Jaun Peracaula, “Neuronal network flux optimization using a model of losses in induction motor drives”, mathematic and computers in Simulation 71, (2006), 290-298.
[40] A. Kusko y D. Galler, “Control means for minimization of losses in ac and dc motor drives”, IEEE Transactions on industry Application, vol 19, no. 4, pp 561-570, July August 1983.
[41] G.O. Garcia, J.C. Mendes Luis, R.M. Stephan y E.H. Watanabe, “An efficient controller for an adjustable speed induction motor drives”, IEEE Transaction on Industrial Electronic, vol 41, no. 5, pp 533-539. October 1994.
[42] Dang Hwa Kim y Jim Park, “Knowledge-based Intelligent Information and Engineering Systems”, 9th International conference, 2005.
[43] S. Lim y K. Nam, “Loss minimizing control sheme for induction motors”, IEE Proc. Electr. Appl, vol 151, no. 4, July 2004.
[44] Lorenz, R.D. y Yang S.M., “Efficiency-optimized flux trajectories for closed cycle operation of field orientation induction machine drives”, IEEE Trans. Ind Appl, 1992, 28 (3), pp 571-580.
[45] Garcia G.O., Luis J.C.M., Stephan R.M., y Watanabe, E.H., “An efficient controller for an adjustable speed induction motor drive”, IEEE Trans, Ind Electron, 1994, 41, (5), pp, 533-539.
[46] Fernandez Bernal F., Garcia Cerrada A., Faure R. “Model based loss minimization for DC and AC vector controlled motors including core saturation”, IEEE Trans. Ind. Appl. 2000, 36, (3), p.p. 755-763.
[47] Kirschen D.S., Novotny D.W. y Lipo T.A., “On line efficiency optimization of a variable frequency induction motor drive”, IEEE Trans, Ind, Appl. 1985, 21 (4), pp 610-615.
[48] Sul S.K. y Park M.H. “A navel technique for optimal efficiency control of a current source inverter fed induction motor”, IEEE Trans. Power Electron, 1988, 3, (2), pp 192-199.
[49] Moreira J.C., Lipo T.A. y Blosko V, “Simple efficiency maximize for an adjustable frequency induction motor drive” IEEE Trans. Ind. Appl, 1991, 27, (5), pp 940-946.
[50] Kim G.K., Ha I..J., Ko M.S., “Control of induction motor for both high dynamic performance and high power efficiency”, IEEE trans. Ind. Electron. 1992, 39, (4), pp 323-333.
[51] Lu Xianliang, Wu Hanguang, “Maximum efficiency control strategy for induction

IPN-SEPI-ESIME-ELÉCTRICA 58
machine”, Electrical Machines and systems, 2001 ICEMS 2001. Proceedings of the fifth International Conference en Published 2001 vol. 1, page 98-100, vol 1
[52] M. Amar, R. Kaczmarek “A General Formula for Prediction of Iron Losses Ander Nonsinusoidal Voltaje Waveform”, IEEE Transaction on Magnetics, Vol. 31, No. 5, September 1995.
[53] L. Kawecki , T. Niewierowicz, D. Pérez Jiménez „Minimización de las Pérdidas Eléctricas y Magnéticas Durante el Control de Velocidad de Motores de Indicción”, Memoria de 10° Congreso Nacional de Ingeniería Electromecánica y de Sistemas, Instituto Politécnico Nacional, Escuela Superior de Ingeniería Mecánica y Eléctrica, Sección de Estudios de Posgrado e Investigación, 26 – 30 de Noviembre de 2007, México D.F., México, páginas 1 – 7
[54] Kirschen. D.S., D.W. Novotny. and T.A. Lipo. "Optimal efficiency control of an induction motor drive" IEEE Transactions on Energy Conversion, vol. EC-2, No. 1, March 1987. [55] Mannan A, Murata T. “Efficiency optimized speed control of field oriented induction motor including core
loss” Proceedings Power Conversion Conference 2002, PCC Osaka 2002. volume 3, pp 1316-1321.
IPN-SEPI-ESIME-ELÉCTRICA 59
APÉNDICE A
A.1 Introducción al control óptimo
El problema de optimización consiste en la selección de las variables de control de un sistema, tales que maximizan o minimizan a una variable dependiente a la que se conoce como índice de optimización (por ejemplo el costo de producción unitaria), dentro de las limitaciones (los rangos admisibles de los cambios) y dentro de los enlaces (las ecuaciones que describen el objeto de control) puestas sobre las variables de control que frecuentemente no son las variables independientes.
Si los disturbios dominantes en el sistema de control son los disturbios que se cambian lentamente en comparación con la dinámica del objeto de control, dicha dinámica se puede despreciar y los enlaces (descripción matemática del objeto de control - el modelo matemático del objeto de control) toman la forma de las ecuaciones algebraicas. En este caso el índice de optimización tiene la forma de una función y el problema de optimización consiste en la búsqueda de los valores de las variables independientes (la búsqueda del punto de equilibrio) que garantizan el valor extremo del criterio de optimización. En este caso el problema de optimización se llama el problema de optimización estática. Si en el sistema de control aparecen disturbios que cambian rápidamente, sobre todo en la forma de los escalones, esto obliga a tomar en consideración la dinámica del objeto de control y su modelo matemático toma la forma de las ecuaciones diferenciales o ecuaciones en diferencias. En este caso el problema de optimización se denomina problema de optimización dinámica. En el caso de optimización dinámica el índice de optimización es una funcional entonces el problema de optimización dinámica consiste en la extremización (minimización o maximización) de un índice de optimización que depende de las variaciones en el tiempo de unas variables (magnitudes) físicas.
A.2 Optimización Dinámica El problema de optimización dinámica se puede definir como el problema de extremización del índice de optimización, que depende de los cambios en el tiempo de las variables de control. Desde el punto de vista de las matemáticas el índice de optimización en la optimización dinámica es una funcional (en el caso de optimización estática el índice de optimización es siempre una función). Obviamente este problema de optimización dinámica tiene sentido solamente cuando podemos influir de alguna manera en los cambios en el tiempo de variables de control. El problema consiste entonces en la búsqueda del control que extremiza el índice de optimización aceptado. Por esto al problema de optimización dinámica se llama frecuentemente problema de control óptimo (el problema de optimización estática, generalmente recibe el nombre de problema de optimización del estado de equilibrio).
Para poder atacar el problema de optimización dinámica tenemos que conocer, entre otras cosas, el modelo matemático del objeto de control. Este modelo puede tener diferentes formas pero siempre debe tomar en consideración la dinámica del objeto de
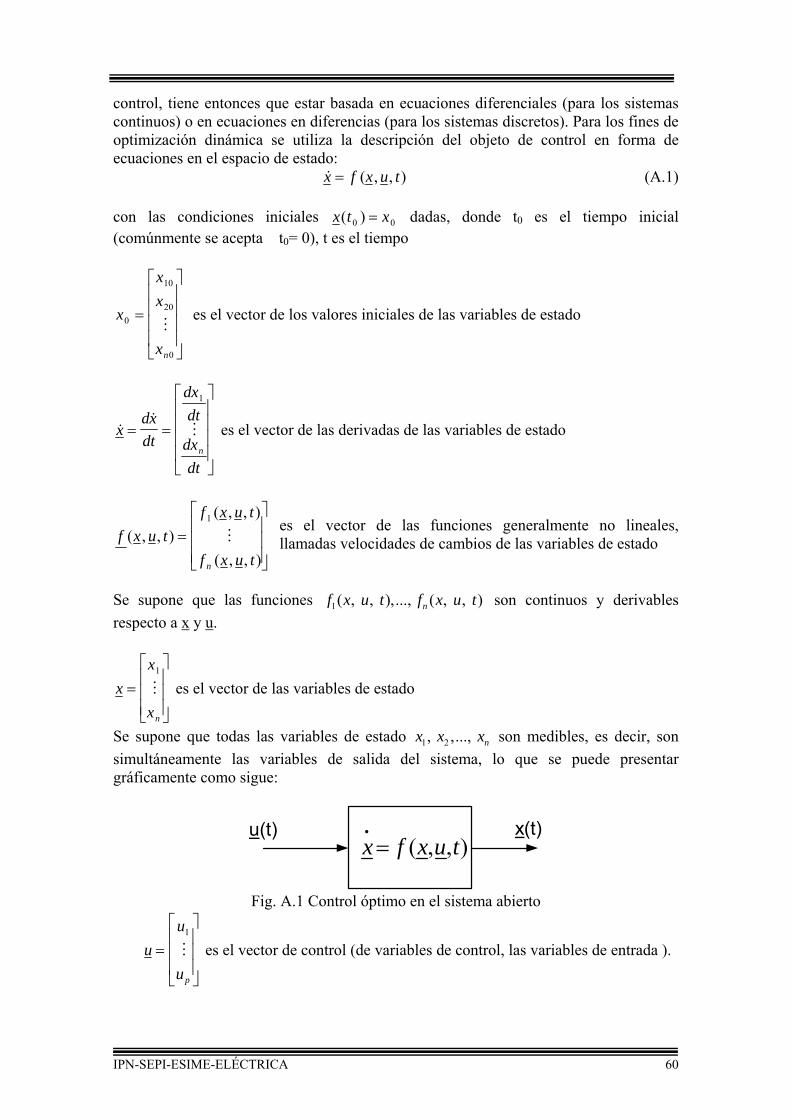
IPN-SEPI-ESIME-ELÉCTRICA 60
control, tiene entonces que estar basada en ecuaciones diferenciales (para los sistemas continuos) o en ecuaciones en diferencias (para los sistemas discretos). Para los fines de optimización dinámica se utiliza la descripción del objeto de control en forma de ecuaciones en el espacio de estado:
( , , )x f x u t= (A.1)
con las condiciones iniciales x t x( )0 0= dadas, donde t0 es el tiempo inicial (comúnmente se acepta t0= 0), t es el tiempo
x
xx
xn
0
10
20
0
=
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
es el vector de los valores iniciales de las variables de estado
xdxdt
dxdt
dxdt
n
= =
⎡
⎣
⎢⎢⎢⎢
⎤
⎦
⎥⎥⎥⎥
1
es el vector de las derivadas de las variables de estado
es el vector de las funciones generalmente no lineales, llamadas velocidades de cambios de las variables de estado
Se supone que las funciones 1( , , ),..., ( , , )nf x u t f x u t son continuos y derivables respecto a x y u.
xx
xn
=
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
1
es el vector de las variables de estado
Se supone que todas las variables de estado 1 2, ,..., nx x x son medibles, es decir, son simultáneamente las variables de salida del sistema, lo que se puede presentar gráficamente como sigue:
u(t) x(t)( , , )x f x u t
•
=
Fig. A.1 Control óptimo en el sistema abierto
uu
up
=
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
1
es el vector de control (de variables de control, las variables de entrada ).
f x u tf x u t
f x u tn
( , , )( , , )
( , , )=
⎡
⎣
⎢⎢⎢
⎤
⎦
⎥⎥⎥
1

IPN-SEPI-ESIME-ELÉCTRICA 61
Se supone que las variables de control 1, ..., pu u son continuas en el tiempo en intervalos. Las limitaciones para las variables de control, están dadas en forma general como las desigualdades siguientes:
ig (u) 0; i = 1, ..., p≤ (A.2)
donde gi son las funciones en general no lineales. En algunos casos particulares las limitaciones (A.2) pueden tomar la forma siguiente:
a u b i p
u M i pi i i
i i
≤ ≤ =
≤ =
⎫⎬⎪
⎭⎪
; , .. . ,
; , . . . ,
1
1 (A.2a)
donde ai, bi, Mi son constantes dadas. Marcando por Du el conjunto de los controles que cumplen las limitaciones (A.2) o (A.2a), a este conjunto le llaman el conjunto de los controles admisibles. El índice de optimización (el criterio de optimización) en el caso general, es la funcional siguiente:
Q u x t t f x u t dtr r
tr
( ) ( ( ), ) ( , , )= + ∫Θ 00
(A.3)
donde: tr es el tiempo (determinado de antemano o no, dependiendo del tipo de problema de optimización) necesario para trasladar el objeto de control del estado inicial dado x0 al estado final descrito en la forma directa (explícita) x(tr) o en la forma implícita, como las restricciones [ ( ), ] 0r rx t tϕ = , donde ϕ es el vector de restricciones, las componentes
ϕ1,..., ( )h h nϕ ≤ del cual, son funciones generalmente no lineales. El estado final puede ser determinado o no, dependiendo del tipo de problema de optimización [ ]( ),r rx t tΘ es una función definida del estado final x(tr) y del tiempo final tr, derivable
respecto a sus argumentos
0f (x, u, t) es una función escalar continua y derivable respecto de las variables de estado, llamada la función de pérdidas instantáneas. El problema de determinación del control óptimo consiste en la determinación del control admisible que cumple con las condiciones que satisfacen las ecuaciones que describen el objeto de control (el modelo del objeto de control) y que garantiza el valor extremo (máximo o mínimo) del índice de optimización, cambiando el estado del sistema controlado del estado inicial al estado final predeterminado o no en un tiempo predeterminado o no.
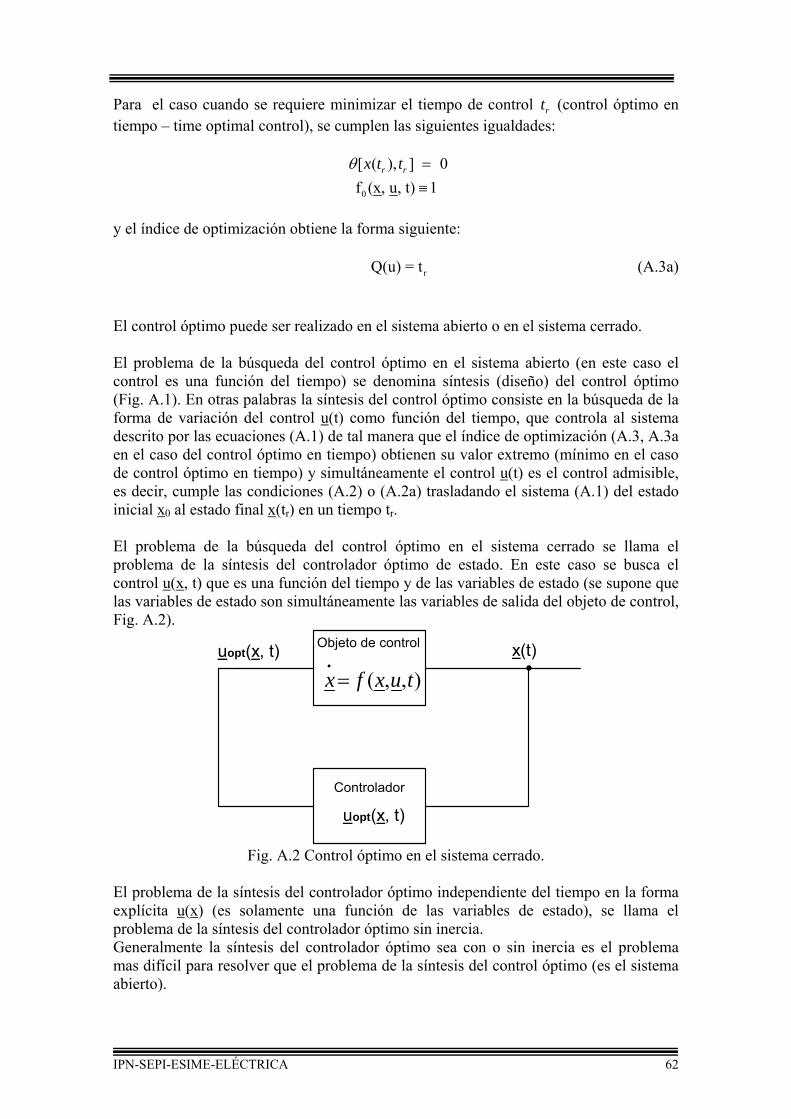
IPN-SEPI-ESIME-ELÉCTRICA 62
Para el caso cuando se requiere minimizar el tiempo de control rt (control óptimo en tiempo – time optimal control), se cumplen las siguientes igualdades:
[ ( ), ] 0r rx t tθ =
0f (x, u, t) 1≡ y el índice de optimización obtiene la forma siguiente:
rQ(u) = t (A.3a) El control óptimo puede ser realizado en el sistema abierto o en el sistema cerrado. El problema de la búsqueda del control óptimo en el sistema abierto (en este caso el control es una función del tiempo) se denomina síntesis (diseño) del control óptimo (Fig. A.1). En otras palabras la síntesis del control óptimo consiste en la búsqueda de la forma de variación del control u(t) como función del tiempo, que controla al sistema descrito por las ecuaciones (A.1) de tal manera que el índice de optimización (A.3, A.3a en el caso del control óptimo en tiempo) obtienen su valor extremo (mínimo en el caso de control óptimo en tiempo) y simultáneamente el control u(t) es el control admisible, es decir, cumple las condiciones (A.2) o (A.2a) trasladando el sistema (A.1) del estado inicial x0 al estado final x(tr) en un tiempo tr. El problema de la búsqueda del control óptimo en el sistema cerrado se llama el problema de la síntesis del controlador óptimo de estado. En este caso se busca el control u(x, t) que es una función del tiempo y de las variables de estado (se supone que las variables de estado son simultáneamente las variables de salida del objeto de control, Fig. A.2).
uopt(x, t) x(t)
( , , )x f x u t•
=
Objeto de control
Controlador
uopt(x, t)
Fig. A.2 Control óptimo en el sistema cerrado.
El problema de la síntesis del controlador óptimo independiente del tiempo en la forma explícita u(x) (es solamente una función de las variables de estado), se llama el problema de la síntesis del controlador óptimo sin inercia. Generalmente la síntesis del controlador óptimo sea con o sin inercia es el problema mas difícil para resolver que el problema de la síntesis del control óptimo (es el sistema abierto).
IPN-SEPI-ESIME-ELÉCTRICA 63
Independientemente del tipo de problema de optimización dinámica y del tipo de síntesis del control óptimo (la síntesis del control óptimo o la síntesis del controlador óptimo con o sin inercia), desde el punto de vista de matemáticas, se tiene que resolver un problema del cálculo de variaciones, en la mayoría de los casos reales, no típico. Para resolver este tipo de problemas se utilizan los métodos siguientes:
• El método de las ecuaciones de Euler y su generalización en forma del método de los multiplicadores de Lagrange.
• El método del principio de máximo de Pontryagin.
• El método de programación dinámica de Bellman.
A.3 Método del principio de máximo de Prontryagin El principio de máximo de Prontryagin establece las condiciones necesarias del control óptimo. La formulación de este método es diferente dependiendo de la forma de descripción de las condiciones finales de las variables de estado (dadas directamente x(tr) o en forma de restricciones [ ( ), ] 0r rx t tϕ = ) [64, 9, 38, 44 de trabajo de Lázaro]. A.3.1 Caso cuando las condiciones finales son dadas directamente (se conoce el estado final x(tr)) Teorema 1 La condición necesaria de la existencia del control óptimo uopt(t) en el sistema abierto y de la trayectoria de estado correspondiente xopt(t), es la existencia de las funciones V0 ≤ 0, V1(t) ,..., Vn(t) tales que no se hacen nulas en forma simultánea, y que satisfacen las condiciones siguientes:
i) El vector V (t) = [V1(t) ,..., Vn(t)]´ de las variables conjugadas con las variables de
estado, es continuo en el intervalo de tiempo [0, tr] y las funciones xopt(t) y V(t) satisfacen las ecuaciones de Hamilton (el sistema de ecuaciones canónicas compuesto por las ecuaciones de estado y las ecuaciones conjugadas):
( ) ( , , )
( )
Hx t f x u tV
HV tx
∂∂∂∂
⎫= = ⎪⎪⎬⎪= −⎪⎭
(A.4)
o en forma escalar:

IPN-SEPI-ESIME-ELÉCTRICA 64
( , , )
( )
1,...,
i ii
ii
Hx f x u tV
HV tx
i n
∂∂
∂∂
⎫= = ⎪⎪⎪
= − ⎬⎪⎪=⎪⎭
(A.4a)
donde H recibe el nombre de Hamiltoniano y se define como sigue:
0 0 00 1
( , , , , ) ( ) ( , , ) ( ) ( , , ) ( ) ( , , )n ndf
i i i ii i
H x V V u t V t f x u t V t f x u t V t f x u t= =
= = +∑ ∑ (A.5)
ii) El control uopt(t) maximiza el Hamiltoniano sobre todo el conjunto de controles admisibles (que cumplen las limitaciones (A.2) o (A.2a)) en el tiempo t ∈ [0, tr], es decir:
0 0( , , , , ) ( , , , , )opt optoptH H x V V u t H x V V u t≡ ≥ (A.6)
para todo el control admisible.
iii) En el punto final (tr, x(tr)) se satisfacen las condiciones de transversabilidad:
0( )opt
r
rx xt t
V t Vx
∂θ∂ =
=
= (A.7)
0( )r
rt t
H t Vt
∂θ∂ =
= − (A.8)
Comentarios. 1) El principio de máximo de Pontryagin para los sistemas lineales es la condición
necesaria y suficiente. 2) La condición (A.6) implica que a lo largo de la trayectoria óptima xopt(t) se cumple:
0 ( )
0 ( )0 ( )
iopt i iopt i
i iopt i i iopt ii
iopt i iopt i
para u b u MH para a u b M u Mu
para u a u M
∂∂
⎧≥ = = +⎪= < < − < < +⎨⎪≤ = = −⎩
3) De las ecuaciones (A.5) y (A.4a) se nota que:
00
( ) 0HV tx
∂∂
= − =

IPN-SEPI-ESIME-ELÉCTRICA 65
(f0 (x, u, t) no depende de x0 puesto que el vector x = [x1, x2, ..., xn]´ no depende de xo),
entonces V0 es una constante.
Por comodidad se acepta que:
0 -1V = (A.9)
El signo negativo se debe a que V0(tr) en los problemas de optimización es más frecuentemente negativo. Por lo tanto la forma equivalente y más utilizada del Hamiltoniano es la siguiente:
01
( , , ) ( , , ) ( ) ( , , )n
i ii
H x V t f x u t V t f x u t=
= − +∑ (A.10)
y en el sistema de las ecuaciones canónicas no existen las variables x0 y V0 (no se aumenta el orden del problema, pero el Hamiltoniano tiene la forma (A.10)). 4) Tomando en consideración (A.9) las condiciones de transversabilidad (A.7) y (A.8)
adquieren la forma siguiente:
( )opt
r
rx xt t
V tx
∂θ∂ =
=
= − (A.11)
( )r
rt t
H tt
∂θ∂ =
= (A.12)
A.3.2 Caso cuando existen las restricciones para las condiciones finales (ϕ[x(tr),tr)]=0)
En este caso el estado final del objeto de control está descrito no en la forma directa (explícita) x(tr) sino en forma de la restricción ϕ[x(tr),tr)]=0. Se define entonces una función:
0 * ' V vθ θ ϕ= + (A.13)
donde ν es un vector de orden “h” de los multiplicadores de Lagrange constantes. Teorema 2 La condición necesaria de la existencia del control óptimo en el sistema abierto uopt(t) es la existencia de las funciones V0 ≤ 0, V1(t),..., Vn(t) y los coeficientes ν1, ν2, ..., νh los que no se hacen nulos en forma simultánea, tales que satisfacen i) y ii) del teorema 1 y cumplen las condiciones de transversabilidad:
IPN-SEPI-ESIME-ELÉCTRICA 66
*
( )opt
r
rx xt t
V tx
∂θ∂ =
=
= (A.14)
H ttopt r
t tr
( )*
= −=
∂θ∂
(A.15)
IPN-SEPI-ESIME-ELÉCTRICA 67
APENDICE B
DETERMINACIÓN DEL VALOR LÍMITE 11i DE LA AMPLITUD DE CORRIENTE DEL ESTATOR DURANTE EL CONTROL ÓPTIMO DE
VELOCIDAD DE MOTORES DE INDUCCIÓN QUE MINIMIZA SIMULTÁNEAMENTE LAS PÉRDIDAS MAGNÉTICAS Y ELÉCTRICAS
B.1 Introducción Las pérdidas magnéticas (las pérdidas de energía eléctrica en el hierro o en el núcleo magnético del motor) constituyen una parte relativamente pequeña de las pérdidas de energía eléctrica totales (la suma de las pérdidas eléctricas y magnéticas) durante el arranque ordinario del motor [28]. En este caso el tiempo de control es relativamente corto, las amplitudes de las corrientes son grandes y en consecuencia las pérdidas en el cobre (las pérdidas en las resistencias de los devanados del estator y del rotor también llamadas las pérdidas eléctricas) son relativamente grandes en comparación con las pérdidas magnéticas [32]. Sin embargo, cuando se controla la velocidad de motor por medio de la variación de la frecuencia y de la amplitud de la corriente (o voltaje) de alimentación con el propósito de limitar la amplitud de la corriente del estator y/o optimizar el control desde el punto de vista de un índice de optimización, como, por ejemplo, la minimización del tiempo de control [30], la minimización de las pérdidas en el cobre [29] etc., la participación de las pérdidas magnéticas en las pérdidas totales no se puede despreciar. Por lo tanto minimizando las pérdidas de la energía eléctrica durante el control de velocidad de motores de inducción, es importante tomar en consideración ambos tipos de pérdidas [33]. B.2 Modelo simple del motor de inducción Para diseñar el controlador óptimo de velocidad del motor de inducción se acepta un modelo matemático de este motor creado bajo las siguientes suposiciones [32]: 1) La fuente que alimenta al motor de inducción es un convertidor de frecuencia de
corriente, simétrico y senoidal 2) El motor de inducción es simétrico de rotor liso 3) Las resistencias e inductancias son constantes 4) El motor opera en la parte lineal de su curva de magnetización 5) Se desprecian los transitorios electromagnéticos. Bajo estas suposiciones el movimiento mecánico del motor se describe por la ecuación siguiente [26,27]:
( )e on
d pM M
dt Jν
ω= − (B.1)
donde: r
n
ωω
ν = es la velocidad relativa de la flecha del motor
p es el número de pares de polos
nω es la frecuencia angular nominal de la corriente de estator J es par de inercia del rotor

IPN-SEPI-ESIME-ELÉCTRICA 68
oM es el par de la carga
eM es el par electromagnético de motor:
( )' 2 2
2 12
2' ' 22 2
32
oe
n o
p R X iMR X X
βω β
=+ +
(B.2)
donde: β es el deslizamiento relativo
'2R es la resistencia del devanado del rotor referido al circuito de estator '2X es la reactancia a la frecuencia nominal de la corriente del estator, de dispersión del
devanado del rotor referido al circuito de estator oX es la reactancia de magnetización del motor de doble fase equivalente a la frecuencia
nominal de la corriente del estator 1i es la amplitud de la corriente del estator
La amplitud de la corriente de magnetización oi se puede expresar en función de 1i en la forma siguiente [32]:
( )
2 2, , 22 2
1 22, , 22 2
o
o
R Xi iR X X
β
β
+=
+ + (B.3)
Las pérdidas en el cobre se describen por [29]:
( )2 ' 21 1 2 2' '
2 2
32
r 2t
oe 2 20 o
= i R + R X dtQR + X + X
β
β
⎡ ⎤⎢ ⎥⎢ ⎥⎣ ⎦
∫ (B.4)
donde:
eQ son las pérdidas en el cobre rt es el tiempo de control.
1R es la resistencia del devanado de una fase del estator Las pérdidas magnéticas se describen por [53, 32]:
( )
( )( )
( )
2 2' ' 22 2 21 22 2' ' 2max 2 2
r
22z m n
t2m
z m r z n nmo 0 o
r z n z n
+A MR XB= i -2 ( + ) dtQ B M M Ai R X X M A B
ν βωβ ν ν βω ω
β ων ων
⎡ ⎤+⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
+ + ++ +
+ −∫ (B.5)
donde:
m
cz
lddA
ργ
24)628.1( +
=

IPN-SEPI-ESIME-ELÉCTRICA 69
πε
200=zB
mB es la densidad máxima del flujo de magnetización para la cual no ocurre todavía la saturación del núcleo magnético de motor d es el grosor de la lámina l es la distancia entre las paredes de los dominios magnéticos que forman las bandas del grosor d
mM es la masa del núcleo magnético del motor
rM es la masa del núcleo magnético del rotor
mQ son las pérdidas en el hierro
cγ es la conductividad específica del material magnético mρ es la densidad específica del material magnético
ω es la frecuencia angular de la corriente del estator ε es la constante cuyo valor depende del tipo de lámina B.3 Minimización de las pérdidas eléctricas y magnéticas Se pide que el control óptimo que minimiza simultáneamente las pérdidas eléctricas y magnéticas también limite la amplitud de la corriente del estator al valor deseado 1
oi :
1 1oi i≤ (B.6)
y la amplitud de la corriente magnetización oi (para evitar la saturación del material magnético del motor):
maxo oi i≤ (B.7)
donde [16]:
max 2 21 1( )
mo
o
uiR X X
=+ +
(B.8)
mu es la amplitud nominal del voltaje de fase del estator
maxoi es la el valor de la amplitud de la corriente de magnetización para el cual el motor opera todavía en la parte lineal de su curva de magnetización
1X es la reactancia, a la frecuencia nominal de la corriente del estator, de dispersión del devanado del estator. Para diseñar el control óptimo se utiliza el principio de máximo de Pontryagin [19]. El índice de optimización debe tomar en consideración las pérdidas en el cobre (B.4) y las pérdidas en el hierro (B.5). Se acepta el índice de optimización como la combinación lineal de ambos tipos de las pérdidas:

IPN-SEPI-ESIME-ELÉCTRICA 70
( )
( )( ) ( ) ( )
22 , 2
2 1 1 2 22, , 20 2 2
2 2' ' 22 2 2
1 12 22' ' 2max2 2
32
r
r
t
oo
t2 2m 2m n z m r n nz z r z n z n
o 0 o
Q i R R X dtR X X
R XB i + -2 ( + ) M A B dtM B M MA Ai R X X
βλβ
βλ ν β ν ν β ων ωνω ω ωβ
⎫⎡ ⎤⎪⎢ ⎥⎪⎢ ⎥⎪⎢ ⎥ ⎪⎣ ⎦ ⎬⎪⎡ ⎤ ⎪⎢ ⎥⎣ ⎦ ⎪⎪⎭
= + ++ +
++ + + −+ +
∫
∫
(B.9) donde: Q es el índice de optimización
21 ,λλ son unas constantes positivas que cumplen la condición: 121 =+λλ . Tomando en consideración (B.9), (B.1) y (B.2) el Hamiltoniano obtiene la forma siguiente:
( )
( )
( )( )( )
( )
21
22 ' 2
2 1 1 2 22, , 22 2
2 2' ' 222 2
1 22 2' ' 2max 2 2
21
32
32
o
o
2z m n
m nz m r z n
o or z zn
, 2o2
n n
i
H = i R R X R X X
+ A MR XB- 2 + B M M Ai R X X M A B
p iJ p R X+ V
βλβ
ω ν ββωλ ω ν ν β
β ω ν ν
ω ω
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
− + ++ +
++ + − +
+ ++ −
( )2' '2
o2 2o 2
- ( ) MR + + X X
β νβ
⎡ ⎤⎢ ⎥⎢ ⎥⎣ ⎦
(B.10) donde V es la variable conjugada [19]. Para minimizar el índice de optimización (B.9) el control óptimo, según el principio de máximo de Pontryagin, tiene que maximizar el Hamiltoniano (B.10), entonces las variables de control 1,i β deben cumplir las ecuaciones siguientes:
1
0
0
HiHβ
∂=
∂∂
=∂
(B.11)
La primera de las ecuaciones (B.11) para el Hamiltoniano escrito por (B.10) obtiene la forma siguiente:
( )
( )( )( )
( )
( ) ( )
2
2 22 ' ' 22 2
1 1 22 2' ' 2max 2 2
' 2' 2 2
1 2 1 2 12 22 2' ' 2 ' ' 22 2 2 2
2 2
32 2 02 2
z m n
m nz m r z n
o or z n z
oo
n no o
A MB R Xi B M M Ai R X X M A B
pmR XJpi R R X iVR X X R X X
ω ν βω βλ ω ν ν β
β ω ν ν
β βλω ωβ β
⎡ ⎤+ +⎢ ⎥+
− + − + + +⎢ ⎥⎢ ⎥+ ++ −⎢ ⎥⎣ ⎦
⎡ ⎤⎢ ⎥− + + =⎢ ⎥+ + + +⎣ ⎦
(B.12)

IPN-SEPI-ESIME-ELÉCTRICA 71
De la ecuación (B.12) se nota que el Hamiltoniano obtiene el valor extremo (máximo o mínimo) cuando 1 0i = . Obviamente, para que el control se pueda realizar, dicho extremo tiene que ser un mínimo puesto que en este caso se tiene que aceptar el valor de 1i posiblemente grande, es decir igual a su valor admisible 1
oi (si fuere un máximo, entonces para cada otro valor 1 0i ≠ el Hamiltonoano tendría el valor menor, lo que significa que el control se debería conducir con el valor 1 0i = , es decir el motor se quedaría inmóvil). Para que el Hamiltoniano tenga un mínimo en función de 1i , la segunda derivada de él respeto de 1i tiene que ser positiva, lo que corresponde al cumplimiento por la variable conjugada V a la condición siguiente:
( )( )( )
( )
( )
2
2 22 3 ' ' 21 2 2
2 ' 2 22
22' ' 22 2 ' 22
1 22 ' 2 22
2 2
3
z m n
m nz m r z n
or z n z
ono
o
A MB R XV B M M A
Jp mR XM A B
R X XR R X
Jp mR X
ω ν βω λ β ω ν ν β
βω ν ν
βλ ωβ
⎡ ⎤+ +⎢ ⎥+
> + − + + +⎢ ⎥⎢ ⎥+ −⎢ ⎥⎣ ⎦
⎡ ⎤+ +⎢ ⎥+ +⎢ ⎥⎣ ⎦
(B.13) Tomando en consideración (B.10) la segunda de las ecuaciones (B.11) obtiene la forma siguiente:
( )
( )( )( )
( )
( ) ( )
( )( )
( )( )
2
2'2
22' ' 22 2
22 2' ' 21
2 22max
2
2'2
2 2
22
2 2
z m n
z m r z n
o r z n z
z m nm n
o z m r z n
z m n
o z m r z n
r
A M
X B M M A
R X X M A B
A MB R Xi B M M A
A M
X X B M M A
M
ω ν β
β ω ν ν β
β ω ν ν
ω ν βλ ω βω ν
ω ν β
β ω ν ν β
⎡ ⎤⎧ ⎫+ +⎢ ⎥⎪ ⎪⎪ ⎪⎢ ⎥− + +⎨ ⎬⎢ ⎥⎪ ⎪⎡ ⎤+ + ++ −⎢ ⎥⎪ ⎪⎢ ⎥ ⎩ ⎭⎣ ⎦ ⎢ ⎥⎢ ⎥⎛ ⎞+
− + + ⎜ ⎟⎢ ⎥⎜ ⎟+ −⎢ ⎥⎝ ⎠⎣ ⎦
+ +
− + + − +
+ ( )( )
( ) ( ) ( )
2 2' ' 22 2
2 22' 2 ' ' 2 ' 2 2 '2 2 2 2 2 2
2 ' 2 22' ' 222 22
3 2 22
3 02
z n z
o o o o
oo
n
R X
A B
R X R X X R X X X
Jp R XV R X X
β
ω ν ν
λ β β β β
βω
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪ +⎨ ⎬⎪ ⎪⎪ ⎪
⎡ ⎤⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥ +⎪ ⎪⎢ ⎥⎪ ⎪−⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
⎡ ⎤− + + − + +⎢ ⎥⎣ ⎦
+ − + =
(B.14) Para determinar la dependencia entre V y las variables de control 1,i β se utiliza la condición 1( , ) 0H iβ = [19] de la cual, tomando en consideración (B.10), se obtiene:

IPN-SEPI-ESIME-ELÉCTRICA 72
( )( )
( )( )( )
( ) ( )
2
2 32 22 ' ' 21
1 2 22max
2 2 22' ' 2 ' 2 21 21 2 2 2
22' 2 2 ' ' 22 1 2 2
2 2
3
3 2 ( )
z m n
m nz m r z n
or z n z
no o
o o n o
LVM
A MBL i R X B M M AJpi
M A B
i R R X X R XJp
M pR X i M R X X
ω ν βω λ β ω ν ν β
ω ν ν
ω λ β β
β ν ω β
=
⎡ ⎤+ +⎢ ⎥⎢ ⎥= + + − + + +⎢ ⎥+ −⎢ ⎥⎣ ⎦
⎡ ⎤+ + + +⎢ ⎥⎣ ⎦
⎡ ⎤= − + +⎢ ⎥⎣ ⎦
(B.15)
Sustituyendo (B.15) en (B.14) se obtiene:
( )
( )
( )( )( )
( )
( ) ( )
2 22' 2 2 ' ' 212 1 2 22
max
2
2'2
22' ' 22 2
2 2' ' 22 2
3 2 ( ) *
2 2
2*
2
m no o n o
o
z m n
z m r z n
o r z n z
z m n
z m r z n
B pR X i M R X Xi
A M
X B M M A
R X X M A B
A MR X
B M M A
λ ω β ν ω β
ω ν β
β ω ν ν β
β ω ν ν
ω ν ββ
ω ν
⎡ ⎤− − + +⎢ ⎥⎣ ⎦
⎡ ⎤⎧ ⎫+ +⎢ ⎥⎪ ⎪⎪ ⎪⎢ ⎥− + +⎨ ⎬⎢ ⎥⎪ ⎪⎡ ⎤+ + + −⎢ ⎥⎪ ⎪⎢ ⎥ ⎩ ⎭⎣ ⎦ ⎢ ⎥⎢ ⎥⎛ ⎞++ + ⎜ ⎟⎢ ⎥⎜ ⎟+ −⎢ ⎝ ⎠⎣ ⎦
( )( )
( )( )( )
( )
( ) ( )
2
2 2 2' ' ' 22 2 2
22' 2 2 ' ' 22 2 1 2 2
22' 2 ' ' 2 ' 2 22 2 2 2
2 2
3 3 2 ( ) *2
* 2 2
z m n
o z m r z n
r z n z
o o n o
o o o o
A M
X X B M M A R X
M A B
pR X i M R X X
R X R X X R X X X
ω ν β
β ω ν ν β β
ω ν ν
λ β ν ω β
β β β
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪
+⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪ +⎨ ⎬
⎥⎪ ⎪⎪ ⎪
⎡ ⎤+ +⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥− + + − + +⎪ ⎪⎢ ⎥⎪ ⎪+ −⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
⎡ ⎤− − + +⎢ ⎥⎣ ⎦
⎡ ⎤+ + − +⎢ ⎥⎣ ⎦ ( )
( ) ( )
( )
( )
( )
( )
2'2
2
2 32 2' ' 21
' 2 2 2 2222' ' 22 1 max2 22
222 ' ' 2 ' 2 22 1 2 2 2
23 2 0
2
3
z m n
z mm n
o r z noo
n r z n z
n o o
A M
B MB R XpR X i M AiR X X
M A B
R R X X R X
β
ω ν β
ω λ β ν βω νβ
ω ω ν ν
ω λ β β
+
⎧ ⎫⎡ ⎤+ +⎪ ⎪⎢ ⎥⎪ ⎪⎢ + ⎥⎛ ⎞
+ + + + +⎪ ⎪⎢ ⎥⎜ ⎟⎪ ⎪−⎝ ⎠⎢ ⎥+ − + =⎨ ⎬⎢ ⎥⎪ + − ⎪⎢ ⎥⎣ ⎦⎪ ⎪
⎪ ⎪⎡ ⎤+ + + +⎪ ⎪⎢ ⎥⎣ ⎦⎩ ⎭ Para cumplir la condición (B.6) y maximizar el Hamiltoniano, se debería mantener
1 1oi i= . Sin embargo, para que se cumpla la condición (B.7), en base a la fórmula (B.3) se
puede concluir que la amplitud de la corriente del estator debe cumplir:
(B.16)

IPN-SEPI-ESIME-ELÉCTRICA 73
2, 2 , 22 2
max1 112 2, 2 ,2 2
( )oo
R X Xi i iR Xβ
β+ +≤ =
+ (B.17)
Entonces, cuando se cumple:
1 11oi i≤ (B.18)
se cumplen simultáneamente las condiciones (B.6) y (B.7) para 1 1
oi i= y para determinar
el valor de deslizamiento relativo β hay que resolver la ecuación (B.16) para 1 1oi i= .
Cuando el valor admisible de la corriente del estator cumple la condición:
1 11oi i> (B.19)
se debería mantener 1 1
oi i= , pero para que se cumpla la condición (B.7), se debe: a) mantener 1 11 1
oi i i= < (determinando 11i de la fórmula (B.17)) y calcular β de la ecuación (B.16) (analogía al control que minimiza las pérdidas solamente en el cobre [26]) ó b) mantener 1 1
oi i= y determinar β de la fórmula siguiente (analogía al control óptimo en tiempo [26,27]):
2' max12 2' 2 ' 2
max2 2 1
( / ) 1( ) ( / )
oo
oo o
i iRX X X i i
β −=+ −
(B.20)
Para minimizar las pérdidas totales no se puede de antemano saber cual de los dos controles a) o b) da los resultados mejores. Esto depende de los valores de los coeficientes
1 2,λ λ y de los parámetros del motor. Por esto la decisión acerca de la aplicación de control a) o b), se puede tomar después de la investigación adicional. Para poder determinar cual condición (B.18) o (B.19) se cumple, se necesita conocer el valor límite 11i de la corriente del estator (fórmula (B.17)). Este valor se puede calcular determinando β de la ecuación (B.16), con 1 11i i= descrita por la fórmula (B.17) (caso b)), y luego calculando el valor de 11i de (B.17) (se obtiene 11( )i ν ). La ecuación (B.17) para 1 11i i= , tiene la forma:

IPN-SEPI-ESIME-ELÉCTRICA 74
( )
( )( )( )
( )
( ) ( )
22 2' 2 2 ' ' 21
2 max 2 22max
2
2'2
22' ' 22 2
2 2' ' 22 2
3 2 ( ) *
2 2
2*
2
m no o o n
o
z m n
z m r z n
o r z n z
z m n
z m r z n
B pR X i M R Xi
A M
X B M M A
R X X M A B
A MR X
B M M A
λ ω β ν ω β
ω ν β
β ω ν ν β
β ω ν ν
ω ν ββ
ω ν
⎡ ⎤− − +⎣ ⎦
⎡ ⎤⎧ ⎫+ +⎢ ⎥⎪ ⎪⎪ ⎪⎢ ⎥− + +⎨ ⎬⎢ ⎥⎪ ⎪⎡ ⎤+ + ++ −⎢ ⎥⎪ ⎪⎢ ⎥ ⎩ ⎭⎣ ⎦ ⎢ ⎥⎢ ⎥⎛ ⎞++ + ⎜ ⎟⎢ ⎥⎜ ⎟+ −⎢ ⎥⎝ ⎠⎣ ⎦
( )( )
( )( )( )
( )
( ) ( )
2
2 2 2' ' ' 22 2 2
2 2' 2 2 ' ' 22 2 max 2 2
2 22' 2 ' ' 2 ' 2 2 '2 2 2 2 2
2 2
3 3 2 ( ) *2
* 2 2
z m n
o z m r z n
r z n z
o o o n
o o o o
A M
X X B M M A R X
M A B
pR X i M R X
R X R X X R X X X
ω ν β
β ω ν ν β β
ω ν ν
λ β ν ω β
β β β β
⎧ ⎫⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪⎪ ⎪ +⎨ ⎬⎪ ⎪⎪ ⎪
⎡ ⎤+ +⎪ ⎪⎢ ⎥⎪ ⎪⎢ ⎥− + + − + +⎪ ⎪⎢ ⎥⎪ ⎪+ −⎢ ⎥⎪ ⎪⎣ ⎦⎩ ⎭
⎡ ⎤− − +⎣ ⎦
⎡ ⎤+ + − +⎢ ⎥⎣ ⎦
( ) ( )
( )
( )
( )
( )
2
2 32 2' ' 21
' 2 2 2 2222' ' 22 max max2 22
222 ' ' 2 ' 2 22 1 2 2 2
23 2 0
2
3
z m n
z mm n
o o r z noo
n r z n z
n o o
A M
B MB R XpR X i M AiR X X
M A B
R R X X R X
ω ν β
ω λ β ν βω νβ
ω ω ν ν
ω λ β β
+
⎧ ⎫⎡ ⎤+ +⎪ ⎪⎢ ⎥⎪ ⎪⎢ + ⎥⎛ ⎞
+ + + + +⎪ ⎪⎢ ⎥⎜ ⎟⎪ ⎪−⎝ ⎠⎢ ⎥+ − + =⎨ ⎬⎢ ⎥⎪ + − ⎪⎢ ⎥⎣ ⎦⎪ ⎪
⎪ ⎪⎡ ⎤+ + + +⎪ ⎪⎢ ⎥⎣ ⎦⎩ ⎭
Cuando el valor límite 1oi se encuentra entre los valores máximo y mínimo de la corriente
límite 11( )i ν , esto significa que hay que cambiar el tipo de control según el cumplimiento de las condiciones (B.18) o (B.19) durante el cambio de la velocidad del motor. Obviamente si el valor límite 1
oi se encuentra por arriba del rango de los cambios de 11( )i ν , hay que aplicar el control óptimo según el caso a) o b) dependiendo cual de estos casos da los resultados mejores para el motor dado y los valores aceptados de 1λ y 2λ . Si el valor límite 1
oi se encuentra por debajo del rango de los cambios de 11( )i ν , hay que aplicar el control con 1 1
oi i= y β calculado de la ecuación (B.16). B.4 Determinación del valor de 11( )νi Utilizando el método presentado se calcula el valor límite 11( )i ν para los motores de inducción analizados y todas las combinaciones de los coeficientes 1λ y 2λ . Para esto se resuelve la ecuación algebraica (B.21) junto con (B.17) para los valores de la velocidad relativa ν de 0 a 1 utilizando un programa escrito en Fortran que proporciona también los datos para graficar los resultados obtenidos en forma de las curvas ( )β ν e 11( )i ν . Para graficar dichas curvas se utilizó el paquete ORIGIN.
(B.21)
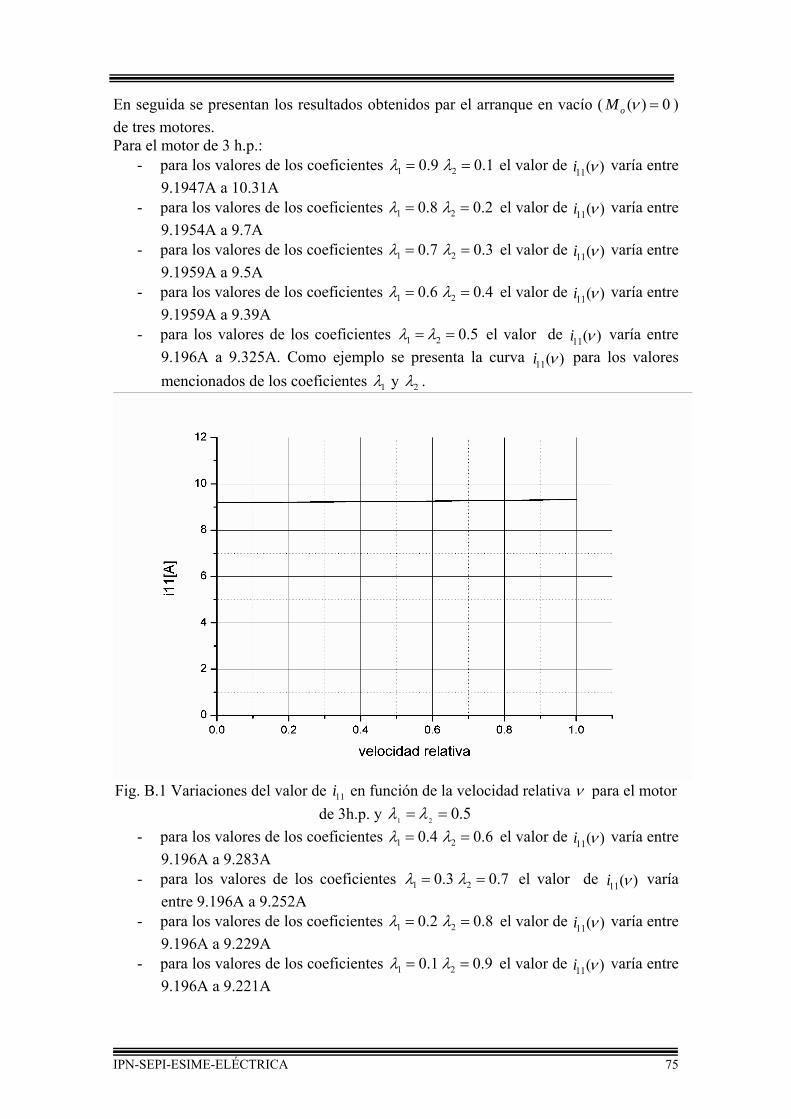
IPN-SEPI-ESIME-ELÉCTRICA 75
En seguida se presentan los resultados obtenidos par el arranque en vacío ( ( ) 0oM ν = ) de tres motores. Para el motor de 3 h.p.:
- para los valores de los coeficientes 1 20.9 0.1λ λ= = el valor de 11( )i ν varía entre 9.1947A a 10.31A
- para los valores de los coeficientes 1 20.8 0.2λ λ= = el valor de 11( )i ν varía entre 9.1954A a 9.7A
- para los valores de los coeficientes 1 20.7 0.3λ λ= = el valor de 11( )i ν varía entre 9.1959A a 9.5A
- para los valores de los coeficientes 1 20.6 0.4λ λ= = el valor de 11( )i ν varía entre 9.1959A a 9.39A
- para los valores de los coeficientes 1 2 0.5λ λ= = el valor de 11( )i ν varía entre 9.196A a 9.325A. Como ejemplo se presenta la curva 11( )i ν para los valores mencionados de los coeficientes 1λ y 2λ .
Fig. B.1 Variaciones del valor de 11i en función de la velocidad relativa ν para el motor
de 3h.p. y 5.021 == λλ - para los valores de los coeficientes 1 20.4 0.6λ λ= = el valor de 11( )i ν varía entre
9.196A a 9.283A - para los valores de los coeficientes 1 20.3 0.7λ λ= = el valor de 11( )i ν varía
entre 9.196A a 9.252A - para los valores de los coeficientes 1 20.2 0.8λ λ= = el valor de 11( )i ν varía entre
9.196A a 9.229A - para los valores de los coeficientes 1 20.1 0.9λ λ= = el valor de 11( )i ν varía entre
9.196A a 9.221A
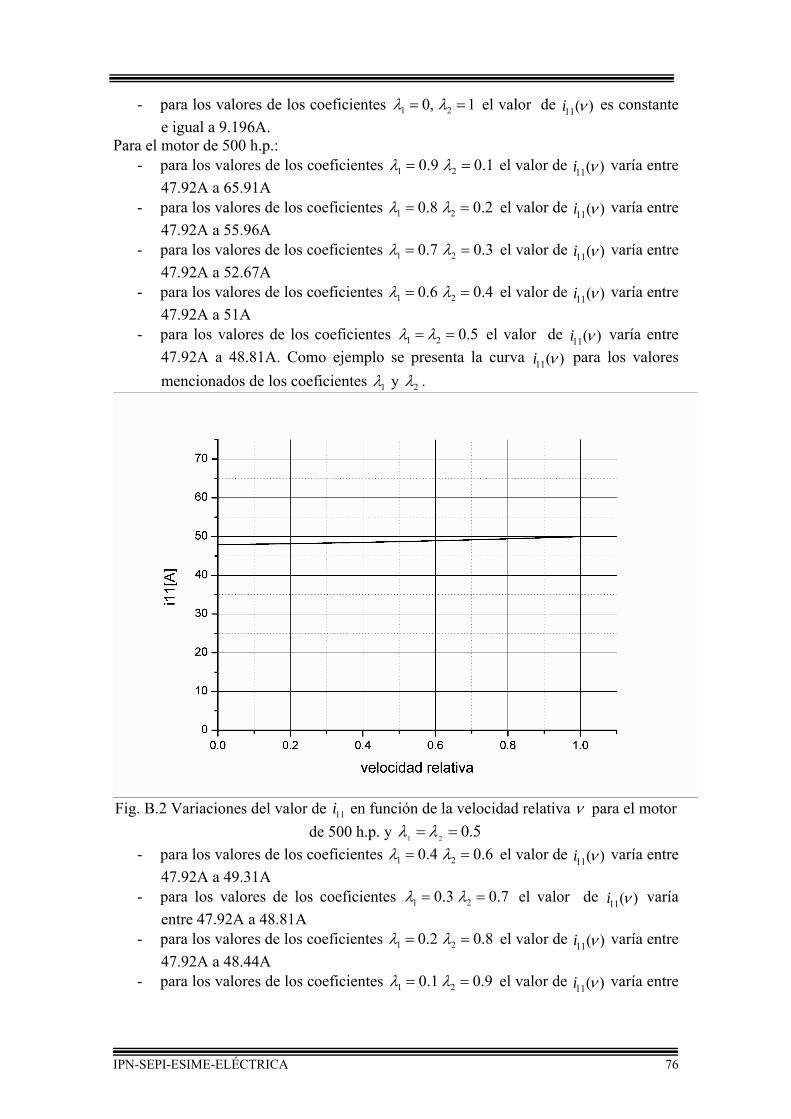
IPN-SEPI-ESIME-ELÉCTRICA 76
- para los valores de los coeficientes 1 20, 1λ λ= = el valor de 11( )i ν es constante e igual a 9.196A.
Para el motor de 500 h.p.: - para los valores de los coeficientes 1 20.9 0.1λ λ= = el valor de 11( )i ν varía entre
47.92A a 65.91A - para los valores de los coeficientes 1 20.8 0.2λ λ= = el valor de 11( )i ν varía entre
47.92A a 55.96A - para los valores de los coeficientes 1 20.7 0.3λ λ= = el valor de 11( )i ν varía entre
47.92A a 52.67A - para los valores de los coeficientes 1 20.6 0.4λ λ= = el valor de 11( )i ν varía entre
47.92A a 51A - para los valores de los coeficientes 1 2 0.5λ λ= = el valor de 11( )i ν varía entre
47.92A a 48.81A. Como ejemplo se presenta la curva 11( )i ν para los valores mencionados de los coeficientes 1λ y 2λ .
Fig. B.2 Variaciones del valor de 11i en función de la velocidad relativa ν para el motor
de 500 h.p. y 5.021 == λλ - para los valores de los coeficientes 1 20.4 0.6λ λ= = el valor de 11( )i ν varía entre
47.92A a 49.31A - para los valores de los coeficientes 1 20.3 0.7λ λ= = el valor de 11( )i ν varía
entre 47.92A a 48.81A - para los valores de los coeficientes 1 20.2 0.8λ λ= = el valor de 11( )i ν varía entre
47.92A a 48.44A - para los valores de los coeficientes 1 20.1 0.9λ λ= = el valor de 11( )i ν varía entre
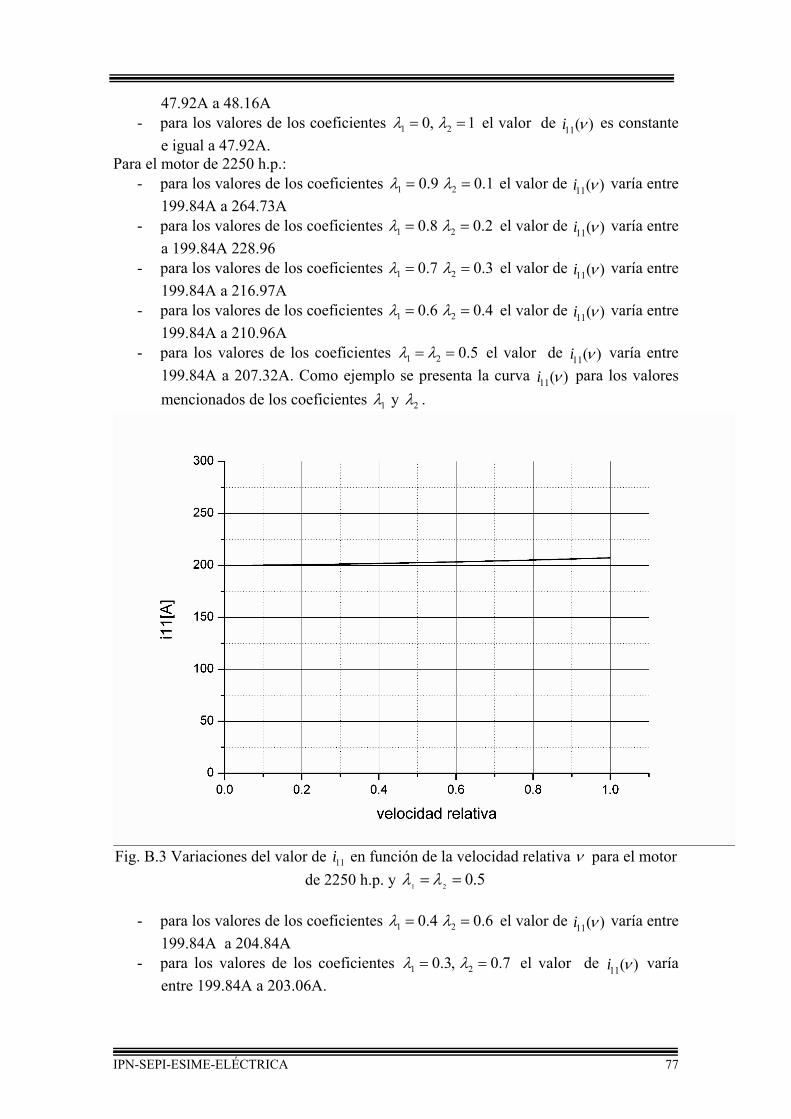
IPN-SEPI-ESIME-ELÉCTRICA 77
47.92A a 48.16A - para los valores de los coeficientes 1 20, 1λ λ= = el valor de 11( )i ν es constante
e igual a 47.92A. Para el motor de 2250 h.p.:
- para los valores de los coeficientes 1 20.9 0.1λ λ= = el valor de 11( )i ν varía entre 199.84A a 264.73A
- para los valores de los coeficientes 1 20.8 0.2λ λ= = el valor de 11( )i ν varía entre a 199.84A 228.96
- para los valores de los coeficientes 1 20.7 0.3λ λ= = el valor de 11( )i ν varía entre 199.84A a 216.97A
- para los valores de los coeficientes 1 20.6 0.4λ λ= = el valor de 11( )i ν varía entre 199.84A a 210.96A
- para los valores de los coeficientes 1 2 0.5λ λ= = el valor de 11( )i ν varía entre 199.84A a 207.32A. Como ejemplo se presenta la curva 11( )i ν para los valores mencionados de los coeficientes 1λ y 2λ .
Fig. B.3 Variaciones del valor de 11i en función de la velocidad relativa ν para el motor
de 2250 h.p. y 5.021 == λλ
- para los valores de los coeficientes 1 20.4 0.6λ λ= = el valor de 11( )i ν varía entre 199.84A a 204.84A
- para los valores de los coeficientes 1 20.3, 0.7λ λ= = el valor de 11( )i ν varía entre 199.84A a 203.06A.

IPN-SEPI-ESIME-ELÉCTRICA 78
- para los valores de los coeficientes 1 20.2 0.8λ λ= = el valor de 11( )i ν varía entre 199.84A a 201.72A
- para los valores de los coeficientes 1 20.1 0.9λ λ= = el valor de 11( )i ν varía entre 199.84A a 200.69A
- para los valores de los coeficientes 1 20, 1λ λ= = el valor de 11( )i ν es constante e igual a 199.84A.

IPN-SEPI-ESIME-ELÉCTRICA 79
( ) ( )
( ) ( )
( )( ) ( )
( ) ( )
' ' ' ''2 2 0 2 2
1 2' ' '0 2 0 2 0 2
' ' ' '2 '2 0 2 2
1 2' ' '0 2 0 2 0 2
' '12 2 20
'' ' '0 22 2 2
cos
sin
sin cos32
d n nd od
q n nq oq
d qnr n
q od d od
d R X R Ri t fdt X X X X X X
d R X R Ri t fdt X X X X X X
i F t tp Xddt JF X X X f f
ψ ω ωξ ψ ψ
ψ ω ωξ ψ ψ
ψ ξ ψ ξωω ω
ψ ψ ψ ψ
= − −+ + +
= − −+ + +
⎧ ⎫⎡ ⎤− +⎣ ⎦⎪ ⎪= ⎨ ⎬
+ ⎪ ⎡ ⎤+ −⎣ ⎦⎩
0
PMJ
⎫⎪⎪⎪⎪⎪⎪⎬⎪
+ ⎪⎪ ⎪⎭ ⎪
⎪− ⎪⎭
0
rt
rQ dt t= =∫
( ) ( )
( ) ( )
( )( ) ( )( )
( ) ( )( )
''2 2 0 2
1 2 1' ' '0 2 0 2 0 2
' ' ''2 2 0 2
2 2 1' ' '0 2 0 2 0 2
' '12 2 2
03 '
' ' '0 22 2 2
1 cos
sin
sin cos32
n nd od
n nq oq
d qn n
q od d oq
R R X RH V i t f X X X X X X
R R X RV i t f X X X X X X
i F t tp XVJF X X X f f
ω ωψ ξ ψ
ω ωψ ξ ψ
ψ ξ ψ ξω ω
ψ ψ ψ ψ
⎡ ⎤= − + − + − +⎢ ⎥+ + +⎣ ⎦⎡ ⎤
+ − + − +⎢ ⎥+ + +⎣ ⎦
⎡ ⎤− +⎢ ⎥+ ⎢ ⎥+ ⎢+ −⎣ ⎦
0 M pJ
⎧ ⎫⎪ ⎪⎪ ⎪−⎨ ⎬⎪ ⎪⎥⎪ ⎪⎩ ⎭
APÉNDICE C
SÍNTESIS DEL CONTROL ÓPTIMO EN TIEMPO DE VELOCIDAD DE MOTORES DE INDUCCIÓN
El problema de optimización consiste, en este caso, en la búsqueda de la descripción matemática del control óptimo en el sistema abierto:
(C.1) que garantiza la minimización del tiempo de control rt y asegura que la corriente del estator cumple la condición:
01 1i i≤ (C.2)
Tomando en consideración el índice de optimización:
(C.3) y las ecuaciones (102-M) que describen el modelo del motor de inducción:
(C.4) el Hamiltoniano obtiene la forma siguiente:
(C.5)
( )( )1 1
t
i i t
ξ ξ= ⎫⎪⎬
= ⎪⎭

IPN-SEPI-ESIME-ELÉCTRICA 80
1
0
0
H
Hi
ξ∂ ⎫= ⎪∂ ⎪
⎬∂ ⎪=⎪∂ ⎭
01 1opti i=
( ) ( )
( ) ( )
2' '
1 2 3 2
2 2' ' ' '
1 2 3 2 2 2 3 2
3sin cos2
3 3sin cos 02 2
q
q d
pt V R V tJ
p pt V R V t V R VJ J
ξ ψ ξ
ξ ψ ξ ψ
⎡ ⎤− + +⎢ ⎥⎣ ⎦⎡ ⎤ ⎡ ⎤− + + + =⎢ ⎥ ⎢ ⎥⎣ ⎦ ⎣ ⎦
donde 1 2 3, ,V V V son las variables conjugadas que satisfacen las ecuaciones conjugadas siguientes:
Para que el control sea óptimo, según el principio de máximo de Pontryagin tienen que cumplirse las ecuaciones siguientes:
(C.7) Puesto que el Hamiltoniano (C.5) depende linealmente de la amplitud de la corriente del estator 1i entonces, para que el Hamiltoniano obtenga el valor máximo, i1 debe ser máximo. Tomando en consideración (C.2) se tiene que cumplir:
(C.8) donde opti1 es el valor óptimo de la amplitud de una fase de la corriente del estator del motor. La primera de las ecuaciones (C.7) para el Hamiltoniano (C.5) tiene la forma siguiente:
(C.9) Tratando la ecuación (C.9) como el producto escalar de dos vectores y tomando en consideración que el valor del Hamiltoniano (C.5) es máximo para el control óptimo, se puede escribir:
( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
' 2 2 '2 0 0 21
1 3 1 3' ' '0 2 0 2 0 2
' 2 2 '2 0 0 22
2 3 1 3' ' '0 2 0 2 0 2
3 03
3 3sin2 2
3 3cos2 2
n noq
n nod
r
R p X p X XdV V V i t V fdt X X J X X JF X X
R p X p X XdV V V i t V fdt X X J X X JF X X
dV Mp Vdt j
ω ωξ ψ
ω ωξ ψ
ω
= − ++ + +
= + −+ + +
∂=
∂
(C.6)

IPN-SEPI-ESIME-ELÉCTRICA 81
(C.10)
Las fórmulas (C.10) describen el control óptimo )(tξ en la forma implícita (como las funciones trigonométricas seno y coseno del ángulo buscado )(tξ , iguales a las funciones de las variables de estado
' '2 2,d qψ ψ y de la variables conjugadas 1 2 3, ,V V V ). Para encontrar
la descripción del control óptimo en tiempo (t)ξ (en la forma explícita), es necesario resolver el sistema de ecuaciones canónicas compuesto por las ecuaciones de estado (C.4) y las ecuaciones conjugadas (C.6). Para esto se tiene que conocer el tipo de la carga con la cual trabaja el motor de inducción (es decir, hay que saber como se cambia el par de la carga oM en función de la velocidad del motor rω ) y las condiciones iniciales de las variables de estado y de las variables conjugadas. Se conocen solamente las condiciones iniciales de las variables de estado (que, por ejemplo, son nulas para el arranque del motor), pero no se conocen las condiciones iniciales de las variables conjugadas. En lugar de los valores iniciales de las variables conjugadas se conoce el valor final de la variable de estado ( )r r rtω ω= (que es el valor deseado de la velocidad del motor en el caso de control de dicha velocidad o es el valor nominal de esta velocidad en el caso del arranque del motor) y se pueden calcular de las condiciones de transversabilidad [21, 19, 20, Apéndice A] los valores finales de las variables conjugadas V 1 y V 2 (las cuales son nulas). De lo antes dicho se nota que para resolver el sistema de las ecuaciones canónicas es necesario primero resolver el problema de doble valor a la frontera que consiste en la búsqueda de las condiciones iniciales de las variables conjugadas (0)V ,(0)V ,(0)V 321 conociendo los valores iniciales de las variables de estado (0) ,(0) ,(0) ,
2q
,
2dr ψψω , los valores finales de las variables conjugadas 0=)t(V ,0=)t(V r2r1 y el valor final de la variable de estado ( )r r rtω ω= . Para resolver el problema de doble valor a la frontera es necesario utilizar una computadora y una estrategia de los cambios de los valores iniciales de las variables conjugadas (un algoritmo de dichos cambios). De esto se ve que para obtener la descripción del control óptimo en la forma explícita es necesario conocer los datos concretos del motor de inducción y de la carga con la cual trabaja este motor, lo que implica que la solución obtenida en esta manera no será general y servirá solamente para este motor concreto. Conociendo los valores iniciales de las variables conjugadas, después de resolver el problema de doble valor a la frontera, se puede determinar el control óptimo en tiempo en la forma explícita (C.1). El deslizamiento absoluto en función del control implícito (C.10) se describe como sigue:
(C.11) dt
tdtdt
t d t = dt
tdt ) )( cos ( )(sin - ))(sin()(cos)()(' ξξξξξβ =
2' '
2 2 3 2
2 22 2' ' ' '
1 2 3 2 2 2 3 2
2' '
1 2 3 2
2 22 2' ' ' '
1 2 3 2 2 2 3 2
32sin
3 32 2
32cos
3 32 2
d
q d
q
q d
pV R VJ
p pV R V V R VJ J
pV R VJ
p pV R V V R VJ J
ψξ
ψ ψ
ψξ
ψ ψ
⎫+ ⎪
= ⎪⎪⎛ ⎞ ⎛ ⎞
− + + + ⎪⎜ ⎟ ⎜ ⎟⎝ ⎠ ⎝ ⎠ ⎪
⎬⎪− ⎪= ⎪
⎛ ⎞ ⎛ ⎞ ⎪− + + +⎜ ⎟ ⎜ ⎟ ⎪⎝ ⎠ ⎝ ⎠ ⎭

IPN-SEPI-ESIME-ELÉCTRICA 82
( ) ( ) ( )
' '2 2
'' ' '0 22 2 2
sin ( ) cos ( )on
1d q
ne
d od q oq
F i t t +p 3 X = M 2 F X X X f - f
ψ ξ ψ ξω ωψ ψ ψ ψ
⎧ ⎫⎡ ⎤−⎣ ⎦⎪ ⎪⎨ ⎬
+ ⎪ ⎪⎡ ⎤+ ⎣ ⎦⎩ ⎭
1 1
1 1
cos ( )sin ( )
d
q
i i ti i t
ξξ
= ⎫⎬= ⎭
Resolviendo el sistema de las ecuaciones canónicas se determinan, entre otros, las variaciones en el tiempo de la velocidad de la flecha de motor )(trω y se calcula el tiempo de control tr . La frecuencia de la corriente o del voltaje de alimentación )(tω se puede calcular de la siguiente fórmula:
(C.12) Si para alimentar el motor de inducción se utiliza un convertidor de frecuencia de voltaje, entonces el vector del voltaje de alimentación para el modelo del motor de doble fase equivalente expresado en las coordenadas d-q acopladas al rotor, se describe por las fórmula siguiente:
(C.13)
La amplitud del voltaje de alimentación se calcula como sigue:
(C.14) Las variables de interés se pueden calcular de las fórmulas siguientes:
- El par electromagnético del motor
(C.15) - La amplitud de la corriente de magnetización se puede calcular de las fórmulas
siguientes:
(C.16)
(C.17)
(C.18)
⎪⎪⎭
⎪⎪⎬
⎫
++++=
−−++=
odro
nr
ooqo
nq
oqro
nr
oodo
nd
tiX
tiRdt
ddt
tdiX
u
tiXtiRdt
ddt
tdiXu
ψωξω
ωξψξ
ω
ψωξω
ωξψξ
ω
)(cos)(sin))((sin
)(sin)(cos))((cos
11
1111
1
11
1111
1
21
21 qd uuu +=
dttdtt r)()()( ξωω +=
( )
( )
'2 0 1
'2 0 1
cos ( )
sin ( )
,2d n d n od,
o 2
,2q n q n oq,
o 2
1 = X i t fi + X X1 = X i t fi + X X
ψ ξ ω ψω
ψ ξ ω ψω
⎫⎡ ⎤− +⎣ ⎦ ⎪⎪⎬⎪⎡ ⎤− +⎣ ⎦ ⎪⎭
' 2 ' 21 2 1 2( ) ( )o d d q qi i i i i= + + +

IPN-SEPI-ESIME-ELÉCTRICA 83
( )
( ) ( )
' ''0 2 0 2
1 2' ' '0 2 0 2 0 2
'0 2
1 ' ''0 2 0 20 2
cos ( )( )
sin ( )
od d odn
,,o 2
oq 2q oqn
X X X Xi t + fX X X X X X
X X X X i t f
X X X XX X
ψ ξ ψ ψω
ψ ξ ψ ψω
⎫= − ⎪+ + + ⎪
⎬⎪= + −⎪+ ++ ⎭
- La amplitud de la corriente del rotor se puede calcular de la fórmula:
(C.19)
sustituyendo en ella
'2
'2 , qd ii por (C.18).
- La amplitud del flujo de magnetización se puede calcular de las fórmulas:
(C.20)
(C.21)
22oqodo ψψψ +=
' ' 2 ' 22 2 2d qi i i= +
IPN-SEPI-ESIME-ELÉCTRICA 84
APÉNDICE D
PROGRAMAS COMPUTACIONALES EN FORTRAN D.1 Programa para simular el control óptimo En este programa los datos son pedidos en pantalla y por lo tanto son introducidos uno por uno. Los resultados son guardados en un archivo de salida. c programa Simulación.for c minimización de las pérdidas totales c modelo con saturación omegak=omegar c alimentación senoidal, cálculo de las pérdidas magnéticas c tomando en consideración la amplitud de la corriente de magnetización real*8 q1,q2,q3 real*8 io,omn,r1,r2,x1,x2,xo,jp,bdt real*8 i1,iom,um,dt,t,trn real*8 i2d,i2q,f2d,f2q,ffod,ffoq,ffo,fod real*8 foq,fo,c1,s1,gn1,hn1,j1,k1,om real*8 m1,u1,f,w1,z1,y1,k11,m11 real*8 u11,w11,z11,y11,gn2,hn2,j2,c2,s2 real*8 k2,m2,u2,w2,z2,y2,k12,m12,u12,w12 real*8 z12,y12,gn3,hn3,j3,c3,s3,k3,m3,u3 real*8 z3,w3,y3,k13,m13,u13,w13,z13,y13 real*8 gn4,hn4,j4,c4,s4,k4,m4,u4,w4,z4,y4 real*8 q5,me,ia,i2,c1s,fods,foqs real*8 u1d,u1q,u,ua,ome,beta,betap real*8 az,bz,mm,mr,bm,qm real*8 l1,l2,i1o,i1opt,a integer p,w,ww,m,pp dimension o1(0:1000) dimension o2(0:1000) dimension o3(0:1000) dimension o4(0:1000) dimension o5(0:1000) dimension o6(0:1000) dimension o7(0:1000) dimension o8(0:1000) dimension o9(0:1000) dimension o10(0:1000) dimension o11(0:1000) dimension o12(0:1000) dimension o13(0:1000) dimension o14(0:1000) dimension o15(0:1000) write(*,*)'um=' read(5,*) um write(*,*)'V1(0)=' read(5,*) q1 write(*,*)'V2(0)=' read(5,*) q2 write(*,*)'V3(0)=' read(5,*) q3 write(*,*)'numero de pares de polos p=' read(5,*) pp write(*,*)'valor nominal de la frecuencia angular omn=' read(5,*) omn
IPN-SEPI-ESIME-ELÉCTRICA 85
write(*,*)'R1=' read(5,*) r1 write(*,*)'R2=' read(5,*) r2 write(*,*)'X1=' read(5,*) x1 write(*,*)'X2=' read(5,*) x2 write(*,*)'Xo=' read(5,*) xo write(*,*)'J=' read(5,*) jp write(*,*)'Mm=' read(5,*) mm write(*,*)'Mr=' read(5,*) mr write(*,*)'valor limite de la corriente del estator i1o=' read(5,*) i1o write(*,*)'tiempo de arranque trn=' read(5,*) trn iom=um/dsqrt(r1**2+(xo+x1)**2) f=(xo+x1)*(xo+x2)-xo**2 a=r1*(xo+x2)**2+r2*xo**2 write(*,*)'paso de integracion dt=' read(5,*) dt write(*,*)'ww=' read(5,*) ww write(*,*)'coeficiente de las pérdidas magneticas l1=' read(5,*) l1 write(*,*)'coeficiente de las pérdidas electricas l2=' read(5,*) l2 do i=0,1000 o1(i)=0 o2(i)=0 o3(i)=0 o4(i)=0 o5(i)=0 o6(i)=0 o7(i)=0 o8(i)=0 o9(i)=0 o10(i)=0 o11(i)=0 o12(i)=0 o13(i)=0 o14(i)=0 o15(i)=0 end do t=0 om=0 f2d=0 f2q=0 ffo=0 ffod=0 ffoq=0 io=0 i2d=0 i2q=0 fod=0
IPN-SEPI-ESIME-ELÉCTRICA 86
foq=0 fo=0 q5=0 qm=0 qmz=0 az=6.584d-6 bz=2.387d-3 bm=1.5 c1=1 s1=0 w=0 80 c1s=c1 s1s=s1 fods=fod foqs=foq i2d=(omn*(f2d+ffod)-xo*i1*c1)/(xo+x2) i2q=(omn*(f2q+ffoq)-xo*i1*s1)/(xo+x2) i2=dsqrt(i2d**2+i2q**2) io=dsqrt((i1*c1+i2d)**2+(i1*s1+i2q)**2) gn1=q2*r2+q3*3*pp**2*f2d/(2*jp) hn1=q1*r2-q3*3*pp**2*f2q/(2*jp) j1=dsqrt(gn1**2+hn1**2) s1=gn1/j1 c1=hn1/j1 betap=c1*(s1-s1s)/dt-s1*(c1-c1s)/dt ome=om+betap beta=betap/omn i1opt=xo*(r2*(q1*c1+q2*s1)+q3*3*pp**2*(f2d*s1-f2q*c1) 1/(2*jp))/(3*l2*r1*(xo+x2)) if(i1opt.le.i1o) then i1=i1opt else i1=i1o end if if(io.le.iom) then bdt=bm*io/iom else bdt=bm end if qm=qm+bdt**2*(az*mm*ome**2+(bz*mm-2*mr*az*om)*ome+mr*(az*om-bz)*om)*dt q5=q5+dt*3*(r1*i1**2+r2*i2**2)/2 me=3*pp*xo*i1*(f2d*s1-f2q*c1)/(2*(xo+x2))+3*pp*omn*xo*x2*(f2q*ffod-f2d*ffoq)/(2*f*(xo+x2)) 10 if (io.le.iom) then ffo=0 else ffo=xo*(io-iom)/omn end if fod=(xo*(x2*i1*c1/omn+f2d)-x2*ffod)/(xo+x2) foq=(xo*(x2*i1*s1/omn+f2q)-x2*ffoq)/(xo+x2) fo=dsqrt(fod**2+foq**2) u1d=x1*i1*(c1-c1s)/(dt*omn)+(fod-fods)/dt +r1*i1*c1-om*x1*i1*s1/omn-om*foq u1q=x1*i1*(s1-s1s)/(dt*omn)+(foq-foqs)/dt+r1*i1*s1+om*x1*i1*c1/omn+om*fod u=dsqrt(u1d**2+u1q**2) ua=u*sin(ome*t) ia=i1*sin(ome*t) if (fo.eq.0) then ffod=0 ffoq=0 else

IPN-SEPI-ESIME-ELÉCTRICA 87
ffod=fod*ffo/fo ffoq=foq*ffo/fo end if k1=dt*(r2*xo*i1*c1/(xo+x2)-r2*omn*f2d/(xo+x2) -r2*omn*ffod/(xo+x2)) m1=dt*(r2*xo*i1*s1/(xo+x2)-r2*omn*f2q/(xo+x2)-r2*omn*ffoq/(xo+x2)) u1=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(f2d*s1-f2q*c1)/omn+x2*(f2q*ffod-f2d*ffoq))) w1=dt*(r2*omn*q1/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s1)*q3) z1=dt*(r2*omn*q2/(xo+x2)+(3*pp**2*xo*q3 /(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c1)) y1=-dt*l1*mr*bdt**2*(2*az*(ome-om)+bz) k11=f2d+k1/2 m11=f2q+m1/2 u11=om+u1/2 w11=q1+w1/2 z11=q2+z1/2 y11=q3+y1/2 gn2=z11*r2+y11*3*pp**2*k11/(2*jp) hn2=w11*r2-y11*3*pp**2*m11/(2*jp) j2=dsqrt(gn2**2+hn2**2) s2=gn2/j2 c2=hn2/j2 k2=dt*(r2*xo*i1*c2/(xo+x2)-r2*omn*k11/(xo+x2)-r2*omn*ffod/(xo+x2)) m2=dt*(r2*xo*i1*s2/(xo+x2)-r2*omn*m11/(xo+x2)-r2*omn*ffoq/(xo+x2)) u2=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k11*s2-m11*c2)/omn+x2*(m11*ffod-k11*ffoq))) w2=dt*(r2*omn*w11/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s2)*y11) z2=dt*(r2*omn*z11/(xo+x2)+(3*pp**2*xo*y11 /(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c2)) y2=-dt*l1*mr*bdt**2*(2*az*(ome-u11)+bz) k12=f2d+k2/2 m12=f2q+m2/2 u12=om+u2/2 w12=q1+w2/2 z12=q2+z2/2 y12=q3+y2/2 gn3=z12*r2+y12*3*pp**2*k12/(2*jp) hn3=w12*r2-y12*3*pp**2*m12/(2*jp) j3=dsqrt(gn3**2+hn3**2) s3=gn3/j3 c3=hn3/j3 k3=dt*(r2*xo*i1*c3/(xo+x2)-r2*omn*k12/(xo+x2)-r2*omn*ffod/(xo+x2)) m3=dt*(r2*xo*i1*s3/(xo+x2)-r2*omn*m12/(xo+x2)-r2*omn*ffoq/(xo+x2)) u3=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k12*s3-m12*c3)/omn+x2*(m12*ffod-k12*ffoq))) w3=dt*(r2*omn*w12/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s3)*y12) z3=dt*(r2*omn*z12/(xo+x2)+(3*pp**2*xo*y12/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c3)) y3=-dt*l1*mr*bdt**2*(2*az*(ome-u12)+bz) k13=f2d+k3 m13=f2q+m3 u13=om+u3 w13=q1+w3 z13=q2+z3 y13=q3+y3 gn4=z13*r2+y13*3*pp**2*k13/(2*jp) hn4=w13*r2-y13*3*pp**2*m13/(2*jp) j4=dsqrt(gn4**2+hn4**2) s4=gn4/j4 c4=hn4/j4 k4=dt*(r2*xo*i1*c4/(xo+x2)-r2*omn*k13/(xo+x2)-r2*omn*ffod/(xo+x2)) m4=dt*(r2*xo*i1*s4/(xo+x2)-r2*omn*m13/(xo+x2)-r2*omn*ffoq/(xo+x2)) u4=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k13*s4-m13*c4)/omn+x2*(m13*ffod-k13*ffoq))) w4=dt*(r2*omn*w13/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s4)*y13) z4=dt*(r2*omn*z13/(xo+x2)+(3*pp**2*xo*y13/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c4))
IPN-SEPI-ESIME-ELÉCTRICA 88
y4=-dt*l1*mr*bdt**2*(2*az*(ome-u13)+bz) f2d=f2d+(k1+2*k2+2*k3+k4)/6 f2q=f2q+(m1+2*m2+2*m3+m4)/6 om=om+(u1+2*u2+2*u3+u4)/6 q1=q1+(w1+2*w2+2*w3+w4)/6 q2=q2+(z1+2*z2+2*z3+z4)/6 q3=q3+(y1+2*y2+2*y3+y4)/6 if (t.eq.0) then qm=0 end if if (t.le.trn) then t=t+dt w=w+1 if (w.eq.ww) then m=m+1 o1(m)=t o2(m)=om/pp o3(m)=q5 o4(m)=me o5(m)=io o6(m)=ua o7(m)=ia o8(m)=u o9(m)=ome o10(m)=i1 o11(m)=i2 o12(m)=fo o13(m)=qm o14(m)=beta o15(m)=qm+q5 write(*,*) o1(m),o2(m),o13(m),o3(m) w=0 goto 80 end if goto 80 end if write(10,1)(o1(p),o2(p),o3(p),o13(p),o4(p),o5(p),o6(p),o7(p),o8(p),o9(p),o10(p),o11(p),o12(p),o14(p),o15(p),p=1,1000,1) 1 format(15f15.5) stop end D.2 Algoritmo Hibrido de optimización Paramétrica. En este programa los datos son pedidos en pantalla y por lo tanto son introducidos uno por uno. Los resultados son guardados en un archivo de salida. !Indice de optimización Qt=l1Qm+l2Qe !Algoritmo híbrido: genético y Gauss-Seidel implicit none integer zi,zj,zn,zp,zm,zcount,zpip,zgen,zk,zl,zyz real*8 znr1,zs,zzs,zzy,zzr,zs1 real*8 znr2,zn1 real*8 zl1,zl3,zl4,zm1,zm2,zg real*8 zmx,zmin,zr1,zvv,zk1 real*8 zr2,zq1,zprcr,zprmu,zmx1,zmin1 real*8 zcop1,zcop2 real*8 zcop3 real, dimension(1) :: zR
IPN-SEPI-ESIME-ELÉCTRICA 89
integer, dimension(1) :: zseed integer, dimension(:,:), allocatable :: za1 integer, dimension(:), allocatable :: za11 integer, dimension(:,:), allocatable :: za real*8, dimension(:), allocatable :: zc real*8, dimension(:), allocatable :: zb real*8, dimension(:), allocatable :: zmi real*8, dimension(:,:), allocatable :: zx real*8, dimension(:,:), allocatable :: zy real*8, dimension(:), allocatable :: q real*8, dimension(:), allocatable :: zq real*8, dimension(:), allocatable :: zfx real*8, dimension(:), allocatable :: znr real*8, dimension(:), allocatable :: zfx1 integer, dimension(:), allocatable :: zcop real, dimension(:), allocatable :: zco !Gauss-Seidel real*8 mi,dlc,dp,d1p,d,d1,dl,dlo real*8 bt,et,q1 real*8, dimension(:), allocatable :: qp real*8, dimension(:), allocatable :: qpp real*8, dimension(:), allocatable :: qpo integer l,p,n2,n,x,s,zzt !Gauss-Seidel !datos del modelo integer pp real*8 io,omn,r1,r2,x1,x2,xo,jp,i2,i1opt real*8 i1,iom,um,ion,dt,t,omr,trn,wsp,i1o real*8 i2d,i2q,f2d,f2q,ffod,ffoq,ffo,fod real*8 foq,fo,c1,s1,gn1,hn1,j1,k1,om,ome,bdt real*8 m1,u1,f,w1,z1,y1,q2,k11,m11 real*8 u11,w11,z11,y11,gn2,hn2,j2,c2,s2 real*8 k2,m2,u2,w2,z2,y2,k12,m12,u12,w12 real*8 z12,y12,gn3,hn3,j3,c3,s3,k3,m3,u3 real*8 z3,w3,y3,k13,m13,u13,w13,z13,y13 real*8 gn4,hn4,j4,c4,s4,k4,m4,u4,w4,z4,y4 real*8 om1,qm,l1,l2 real*8 mm,mr,az,bz,bm,c1s,s1s,i1n 2 t=0 om=0 f2d=0 f2q=0 ffo=0 ffod=0 ffoq=0 io=0 i2d=0 i2q=0 fod=0 foq=0 fo=0 q2=0 ion=0 qm=0 az=6.584d-6 bz=2.387d-3 bm=1.5 c1=1 s1=0

IPN-SEPI-ESIME-ELÉCTRICA 90
!fin de los datos del modelo !declaraciones del modelo if(zyz.eq.1)then zyz=0 goto 1000 end if write(*,*)'um =' read(5,*) um write(*,*)'numero de pares de polos =' read(5,*) pp write(*,*)'valor nominal de la frecuencia angular =' read(5,*) omn write(*,*)'R1 =' read(5,*) r1 write(*,*)'R2 =' read(5,*) r2 read(5,*) x1 write(*,*)'X2 =' read(5,*) x2 write(*,*)'Xo =' read(5,*) xo write(*,*)'J =' read(5,*) jp write(*,*)'valor limite de la corriente del estator =' read(5,*) i1o write(*,*)'valor maximo del tiempo de arranque =' read(5,*) trn write(*,*)'coeficiente del indice de optimizacion =' read(5,*) wsp write(*,*)'masa del motor =' read(5,*) mm write(*,*)'masa del rotor =' read(5,*) mr write(*,*)'paso de integracion =' read(5,*) dt write(*,*)'coeficiente de las pérdidas magneticas l1 =' read(5,*) l1 write(*,*)'coeficiente de las pérdidas electricas l2 =' read(5,*) l2 iom=um/dsqrt(r1**2+(xo+x1)**2) f=(xo+x1)*(xo+x2)-xo**2 !fin de declaraciones del modelo !declaraciones del algoritmo zp=3 allocate(q(zp)) allocate(zq(zp)) !Gauss-Seidel allocate(qp(zp)) allocate(qpo(zp)) allocate(qpp(zp)) allocate(zc(zp)) allocate(zb(zp)) allocate(zmi(zp)) !Gauss-Seidel print*,"Si quiere aplicar el algoritmo genetico escriba 1" print*,"Si quiere aplicar el algoritmo de Gauss-Seidel escriba 0" read*,zzr if(zzr.ne.1) then do l=1,zp
IPN-SEPI-ESIME-ELÉCTRICA 91
print*,"valor inicial del parametro numero",l,'=' read*,q(l) end do zzy=1 goto 110 end if print*,"probabilidad de cruce =" read*,zprcr print*,"probabolidad de mutacion =" read*,zprmu zprmu=0.03 print*,"numero de cromosomas =" read*,zn zn=200 allocate(zx(zn,zp)) allocate(zy(zn,zp)) allocate(zfx(zn)) allocate(znr(zn)) allocate(zfx1(zn)) allocate(zcop(zn)) allocate(zco(zn)) zmx1=1e-35 zmin1=1e+35 zpip=0 1000 do zl=1,zp print*,"valor minimo del parametro",zl read*,zc(zl) print*,"valor maximo del parametro",zl read*,zb(zl) end do print*,"exactitud - numero de digitos despues del punto flotante" read*,zq1 print*,"numero de generaciones =" read*,zg print*,"Si quiere usar la seleccion de rango escriba 1" print*,"Si quiere usar la seleccion de torneo escriba 2" print*,"Si quiere usar la seleccion de ruleta escriba 3" read*,zs if(zs.eq.2) then print*,"Cuantas copias del mejor cromosoma quiere introducir en" print*,"la poblacion paterna utilizando la seleccion de torneo?" read*,zzs end if if(zs.eq.3) then print*,"Si quiere utilizar la seleccion deterministica de" print*,"ruleta escriba 1" print*,"Si quiere utilizar la seleccion estocastica de" print*,"ruleta escriba 0" read*,zs1 end if !fin de declaraciones del algoritmo !cálculo de la longitud del cromosoma en base a la !exactitud declarada y limites declarados de los parámetros zm=0 do zl=1,zp zmi(zl)=1 1 if((zb(zl)-zc(zl))*10**zq1>2**zmi(zl)-1) then zmi(zl)=zmi(zl)+1 goto 1
IPN-SEPI-ESIME-ELÉCTRICA 92
end if zm=zm+zmi(zl) end do !fin del cálculo de la longitud del cromosoma allocate(za(zn,zm)) allocate(za1(zn,zm)) allocate(za11(zm)) !generación de la primera población !paterna aleatoria call system_clock(zcount) zseed=zcount call random_seed(put=zseed) do zi=1,zn do zj=1,zm call random_number(zR) if (zR(1)<0.5) then zgen=1 else zgen=0 end if za(zi,zj)=zgen end do end do fin de generación de la población !cálculo del valor de cada parámetro en !cada cromosoma 0 do zl4=1,zn do zl=1,zp zmi(0)=0 zm1=1 do zl1=0,zl-1 zm1=zm1+zmi(zl1) end do zm2=0 do zl1=1,zl zm2=zm2+zmi(zl1) end do zy(zl4,zl)=0 do zl3=zm1,zm2 zy(zl4,zl)=zy(zl4,zl)+za(zl4,zl3)*2**(zm2-zl3) zx(zl4,zl)=zc(zl)+zy(zl4,zl)*(zb(zl)-zc(zl))/(2**zmi(zl)-1) end do end do end do !fin del cálculo de cada parámetro !cálculo del modelo do zi=1,zn 115 if(zzy.ne.1) then q(1)=zx(zi,1) q(2)=zx(zi,2) q(3)=zx(zi,3) end if condiciones iniciales i1n=0 ion=0 q2=0 fo=0 t=0 om=0
IPN-SEPI-ESIME-ELÉCTRICA 93
ome=0 f2d=0 f2q=0 ffo=0 fod=0 io=0 ffoq=0 i2d=0 i2q=0 fod=0 fgoq=0 qm=0 c1=1 s1=0 !fin de condiciones iniciales 80 c1s=c1 s1s=s1 i2d=(omn*(f2d+ffod)-xo*i1*c1)/(xo+x2) i2q=(omn*(f2q+ffoq)-xo*i1*s1)/(xo+x2) io=dsqrt((i1*c1+i2d)**2+(i1*s1+i2q)**2) i2=dsqrt(i2d**2+i2q**2) gn1=q(2)*r2+q(3)*3*pp**2*f2d/(2*jp) hn1=q(1)*r2-q(3)*3*pp**2*f2q/(2*jp) if (dabs(gn1).gt.1d+50)then if(zzy.ne.1)then zfx(zi)=1e+18 goto 12 else goto 390 end if end if j1=dsqrt(gn1**2+hn1**2) s1=gn1/j1 c1=hn1/j1 ome=om+c1*(s1-s1s)/dt-s1*(c1-c1s)/dt if(l2.eq.0)then i1=i1o else i1opt=xo*(r2*(q(1)*c1+q(2)*s1)+q(3)*3*pp**2*(f2d*s1-f2q*c1)/(2*jp))/(3*l2*r1*(xo+x2)) if(i1opt.le.i1o) then i1=i1opt else i1=i1o end if end if if(io.le.iom) then bdt=bm*io/iom else bdt=bm end if qm=qm+bdt**2*(az*mm*ome**2+(bz*mm-2*mr*az*om)*ome+mr*(az*om-bz)*om)*dt q2=q2+dt*3*(r1*i1**2+r2*i2**2)/2 if (io.gt.ion) then ion=io end if if(i1.gt.i1n)then i1n=i1 end if 11 if (io.le.iom) then

IPN-SEPI-ESIME-ELÉCTRICA 94
ffo=0 else ffo=xo*(io-iom)/omn end if fod=(xo*(x2*i1*c1/omn+f2d)-x2*ffod)/(xo+x2) foq=(xo*(x2*i1*s1/omn+f2q)-x2*ffoq)/(xo+x2) fo=dsqrt(fod**2+foq**2) if (fo.eq.0) then ffod=0 ffoq=0 else ffod=fod*ffo/fo ffoq=foq*ffo/fo end if k1=dt*(r2*xo*i1*c1/(xo+x2)-r2*omn*f2d/(xo+x2)-r2*omn*ffod/(xo+x2)) m1=dt*(r2*xo*i1*s1/(xo+x2)-r2*omn*f2q/(xo+x2) -r2*omn*ffoq/(xo+x2)) u1=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(f2d*s1-f2q*c1)/omn+x2*(f2q*ffod-f2d*ffoq))) w1=dt*(r2*omn*q(1)/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s1)*q(3)) z1=dt*(r2*omn*q(2)/(xo+x2)+(3*pp**2*xo*q(3)/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c1)) y1=-dt*l1*mr*bdt**2*(2*az*(ome-om)+bz) k11=f2d+k1/2 m11=f2q+m1/2 u11=om+u1/2 w11=q(1)+w1/2 z11=q(2)+z1/2 y11=q(3)+y1/2 gn2=z11*r2+y11*3*pp**2*k11/(2*jp) hn2=w11*r2-y11*3*pp**2*m11/(2*jp) j2=dsqrt(gn2**2+hn2**2) s2=gn2/j2 c2=hn2/j2 k2=dt*(r2*xo*i1*c2/(xo+x2)-r2*omn*k11/(xo+x2)-r2*omn*ffod/(xo+x2)) m2=dt*(r2*xo*i1*s2/(xo+x2)-r2*omn*m11/(xo+x2)-r2*omn*ffoq/(xo+x2)) u2=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k11*s2-m11*c2)/omn+x2*(m11*ffod-k11*ffoq))) w2=dt*(r2*omn*w11/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s2)*y11) z2=dt*(r2*omn*z11/(xo+x2)+(3*pp**2*xo*y11/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c2)) y2=-dt*l1*mr*bdt**2*(2*az*(ome-u11)+bz) k12=f2d+k2/2 m12=f2q+m2/2 u12=om+u2/2 w12=q(1)+w2/2 z12=q(2)+z2/2 y12=q(3)+y2/2 gn3=z12*r2+y12*3*pp**2*k12/(2*jp) hn3=w12*r2-y12*3*pp**2*m12/(2*jp) j3=dsqrt(gn3**2+hn3**2) s3=gn3/j3 c3=hn3/j3 k3=dt*(r2*xo*i1*c3/(xo+x2)-r2*omn*k12/(xo+x2)-r2*omn*ffod/(xo+x2)) m3=dt*(r2*xo*i1*s3/(xo+x2)-r2*omn*m12/(xo+x2)-r2*omn*ffoq/(xo+x2)) u3=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k12*s3-m12*c3)/omn+x2*(m12*ffod-k12*ffoq))) w3=dt*(r2*omn*w12/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s3)*y12) z3=dt*(r2*omn*z12/(xo+x2)+(3*pp**2*xo*y12/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c3)) y3=-dt*l1*mr*bdt**2*(2*az*(ome-u12)+bz) k13=f2d+k3 m13=f2q+m3 u13=om+u3 w13=q(1)+w3 z13=q(2)+z3
IPN-SEPI-ESIME-ELÉCTRICA 95
y13=q(3)+y3 gn4=z13*r2+y13*3*pp**2*k13/(2*jp) hn4=w13*r2-y13*3*pp**2*m13/(2*jp) j4=dsqrt(gn4**2+hn4**2) s4=gn4/j4 c4=hn4/j4 k4=dt*(r2*xo*i1*c4/(xo+x2)-r2*omn*k13/(xo+x2)-r2*omn*ffod/(xo+x2)) m4=dt*(r2*xo*i1*s4/(xo+x2)-r2*omn*m13/(xo+x2)-r2*omn*ffoq/(xo+x2)) u4=dt*((3*pp**2*omn*xo/(2*f*jp*(xo+x2)))*(f*i1*(k13*s4-m13*c4)/omn+x2*(m13*ffod-k13*ffoq))) w4=dt*(r2*omn*w13/(xo+x2)+(3*pp**2*xo/(2*jp*(xo+x2)))*(x2*omn*ffoq/f-i1*s4)*y13) z4=dt*(r2*omn*z13/(xo+x2)+(3*pp**2*xo*y13/(2*jp*(xo+x2)))*(-x2*omn*ffod/f+i1*c4)) y4=-dt*l1*mr*bdt**2*(2*az*(ome-u13)+bz) f2d=f2d+(k1+2*k2+2*k3+k4)/6 f2q=f2q+(m1+2*m2+2*m3+m4)/6 om=om+(u1+2*u2+2*u3+u4)/6 q(1)=q(1)+(w1+2*w2+2*w3+w4)/6 q(2)=q(2)+(z1+2*z2+2*z3+z4)/6 q(3)=q(3)+(y1+2*y2+2*y3+y4)/6 if (t.eq.0) then qm=0 if(om.le.0) then if(zzy.ne.1)then zfx(zi)=1e+16 goto 12 else d1=1d+16 goto 390 end if end if end if if(qm.lt.0.or.om.lt.0)then if(zzy.ne.1)then zfx(zi)=1e+16 goto 12 else d1=1d+16 goto 390 end if end if if (dabs(om).le.omr.and.t.lt.trn.and.q(1).lt.1d+6) goto 310 goto321 310 if (q(2).lt.1d+6.and.q(3).lt.1d+6) goto 315 goto321 315 if (f2d.lt.1d+6.and.f2q.lt.1d+6) then t=t+dt goto 80 end if 321 if (om.gt.omr) then om1=omr else om1=om end if !cálculo del índice de optimización if(zzy.eq.1) goto 125 if(ion.gt.iom)then zfx(zi)=l1*qm+l2*q2+wsp*dabs(omr/om1)+wsp else zfx(zi)=l1*qm+l2*q2+wsp*dabs(omr/om1) end if
IPN-SEPI-ESIME-ELÉCTRICA 96
!fin del cálculo del índice de optimización 12 end do !fin del cálculo del modelo elección del mejor cromosoma znr2=1 zmin=zfx(1) do zi=1,zn if(zfx(zi)<zmin) then zmin=zfx(zi) znr2=zi end if end do zmin=zfx(znr2) print*,"valor del indice de optimizacion =",zmin,zk print*,"incremento del indice =",zmin-zmin1,zpip !fin de eleccion del mejor cromosoma !terminación de los cálculos e impresión de los resultados if(zk>=zg.or.zpip>5) then if(zmin<zmin1) then print*,"valor minimo del indice de optimizacion =",zmin,zk do zi=1,zp q(zi)=zx(znr2,zi) zq(zi)=zx(znr2,zi) end do zmin1=zmin do zi=1,zm za11(zi)=za(znr2,zi) end do else print*,"valor minimo del indice de optimizacion =",zmin1,zk q(zi)=zq(zi) end do end if do zi=1,zp print*,"valor del parametro nr",zi,"=",q(zi) end do print*,"Si quiere usar otra vez el algoritmo genetico" print*,"escriba 1 y si no escriba 0" read*, zyz if(zyz.eq.1)then zk=0 zpip=0 deallocate(za) deallocate(za1) deallocate(za11) goto 2 end if print*,"Si quiere usar el algoritmo de Gauss-Seidel" print*,"escriba 1 y si no escriba 0" read*,zzy if(zzy.eq.1) goto 110 goto 100 end if !fin de terminación de los cálculos e impresión de los resultados !memorización de los mejores valores de los parámetros, !del menor valor del índice de optimización y !del mejor cromosoma para !k - ésima generación
IPN-SEPI-ESIME-ELÉCTRICA 97
if(zmin.eq.zmin1) then zpip=zpip+1 else zpip=0 end if if(zmin<zmin1) then zmin1=zmin do zi=1,zp zq(zi)=zx(znr2,zi) end do do zi=1,zm za11(zi)=za(znr2,zi) end do end if !fin de memorización !ordenar a los cromosomas según el rango del mayor !al menor zn1=zn 30 if(zn>0) then znr1=1 znr2=1 zmx=zfx(1) zmin=zfx(1) do zi=1,zn1 if(zfx(zi)>zmx) then zmx=zfx(zi) znr1=zi end if if(zfx(zi)<zmin) then zmin=zfx(zi) znr2=zi end if end do zfx1(zn)=zfx(znr2) do zi=1,zm za1(zn,zi)=za(znr2,zi) end do zfx(znr2)=zfx(znr1)+0.1 zn=zn-1 goto 30 end if zn=zn1 !fin de ordenar a los cromosomas !escribir a la tabla de los cromosomas según el rango do zi=1,zn zfx(zi)=zfx1(zi) do zj=1,zm za(zi,zj)=za1(zi,zj) end do end do !fin de escritura de los cromosomas según el rango !determinación del numero de las copias de cada cromosoma !según el método del rango (lineal) if(zs.eq.1) then do zk1=1,zn zcop3=2*zk1/zn zr1=zcop3-int(zcop3) if(zr1>=0.5) then zcop(zk1)=int(zcop3)+1
IPN-SEPI-ESIME-ELÉCTRICA 98
else zcop(zk1)=int(zcop3) end if zcop1=zcop1+zcop(zk1) end do if(zcop1<=zn) then zcop2=zn-zcop1 zcop(zn)=zcop(zn)+zcop2 else zcop2=zcop1-zn znr1=1 zmx=zcop(1) do zi=1,zn if(zcop(zi)>zmx) then zmx=zcop(zi) znr1=zi end if end do do zi=znr1,znr1-1+zcop2 zcop(zi)=zcop(zi)-1 end do end if zcop1=0 do zi=1,zn if(zcop(zi).eq.0) then zcop1=zcop1+1 end if end do do zk1=1,zcop1 do zi=1,zn-zk1 do zj=1,zm za1(zi,zj)=za(zi+zk1,zj) end do end do end do do zi=1,zn do zj=1,zm if(zcop(zi)>1) then za1(zi-1,zj)=za(zi,zj) end if end do end do end if ¡fin de determinación del número de las copias de cada cromosoma ¡utilizando el método de rango !selección de torneo con la estrategia elitar que consiste !en la introducción "zzs" copias del mejor cromosoma !en la población paterna if(zs.eq.2) then do zi=1,zm za1(zn,zi)=za11(zi) end do zfx1(zn)=zfx(zn) do zi=1,zn do zj=1,2 60 call random_number(zR) zr1=1+int(zR(1)*(zn)) if (zr1.eq.zn) then zr1=zn
IPN-SEPI-ESIME-ELÉCTRICA 99
end if znr(zj)=zr1 if(znr(1).eq.znr(2)) goto 60 nd do if(zfx(znr(1))<zfx(znr(2))) then zfx1(zn-zi)=zfx(znr(1)) do zk1=1,zm za1(zn-zi,zk1)=za(znr(1),zk1) end do else zfx1(zn-zi)=zfx(znr(2)) do zk1=1,zm za1(zn-zi,zk1)=za(znr(2),zk1) end do end if end do do zj=1,zzs do zi=1,zm za1(zn-zj,zi)=za11(zi) end do zfx1(zn-zj)=zfx(zn) end do end if !fin de la seleccion de torneo !determinacion del número de las copias de cada cromosoma !con la selección del método de ruleta if(zs.eq.3) then zvv=0 do zi=1,zn zvv=zvv+zfx(zi) end do !determinístico if(zs1.eq.1) then zcop3=0 do zi=1,zn zcop(zi)=int((1-zfx(zi)/zvv)*zn) zcop3=zcop3+zcop(zi) end do 55 if(zcop3>zn) then do zj=1,zn if(zcop(zj)>0.and.zcop3>zn) then zcop(zj)=zcop(zj)-1 zcop3=zcop3-1 end if end do goto 55 end if zcop1=0 do zi=1,zn if (zcop(zi).eq.0) then zcop1=zcop1+1 end if end do do zk1=1,zcop1 do zi=1,zn-zk1 zfx1(zi)=zfx(zi+zk1) do zj=1,zm za1(zi,zj)=za(zi+zk1,zj) end do
IPN-SEPI-ESIME-ELÉCTRICA 100
end do end do do zi=1,zn if(zcop(zi)>1) then zfx1(zi-1)=zfx(zi) end if do zj=1,zm if (zcop(zi)>1) then za1(zi-1,zj)=za(zi,zj) end if end do end do end if fin de determinación del número de copias del método determinístico de ruleta !estocástico if(zs1.ne.1)then ¡determinación del número de las copias - método estocástico de ruleta do zi=1,zn zco(zi)=1-zfx(zi)/zvv end do do zi=1,zn zcop(zi)=0 end do do zi=1,zn call random_number(zR) zr1=zco(1) zk1=1 61 if(zk1<zn+1) then if(zR(1)<=zr1) then zcop(zk1)=zcop(zk1)+1 else zr1=zr1+zco(zk1+1) zk1=zk1+1 goto 61 end if end if end do zi=1 63 if(zi<=zn) then if(zcop(zi).eq.0)then zj=1 62 if(zj<=zn)then if(zcop(zj)>1)then zfx1(zi)=zfx(zj) do zk1=1,zm za1(zi,zk1)=za(zj,zk1) end do zcop(zj)=zcop(zj)-1 goto 64 end if zj=zj+1 goto 62 end if end if 64 zi=zi+1 goto 63 end if end if end if
IPN-SEPI-ESIME-ELÉCTRICA 101
!fin de determinación del número de las copias con el método estocástico de ruleta !creación de la población paterna do zi=1,zn zfx(zi)=zfx1(zi) do zj=1,zm za(zi,zj)=za1(zi,zj) end do end do ¡fin de la creación de la población paterna ¡aplicación de cruce y mutación para crear !nueva población !cruce do zi=1,zn/2 do zj=1,2 call random_number(zR) zr1=1+int(zR(1)*zn) if (zr1.eq.zn+1) then zr1=zn end if znr(zj)=zr1 end do call random_number(zR) zr2=1+int(zR(1)*zm) if(zr2.eq.zm+1) then zr2=zm end if do zk1=1,zr2 do zj=zr2,zm call random_number(zR) if(zR(1)<zprcr) then za1(znr(1),zk1)=za(znr(1),zk1) za1(znr(1),zj)=za(znr(2),zj) za1(znr(2),zk1)=za(znr(2),zk1) za1(znr(2),zj)=za(znr(1),zj) end if end do end do end do !mutación do zi=1,zn do zj=1,zm call random_number(zR) if(zR(1)<zprmu) then zk1=zj if (za1(zi,zk1).eq.1) then za1(zi,zk1)=0 else za1(zi,zk1)=1 end if end if end do end do do zi=1,zn do zj=1,zm za(zi,zj)=za1(zi,zj) end do end do ¡fin de la creación de la nueva población paterna !crear la siguiente generación

IPN-SEPI-ESIME-ELÉCTRICA 102
zk=zk+1 goto 10 !Gauss-Seidel 110 print*,"incremento inicial de los parametros =" read*,dlc write(*,*)'paso de integracion =' read(5,*) dt print*,"primer parametro para calcular =" read*,n2 !condiciones iniciales del modelo i1n=0 ion=0 q2=0 fo=0 t=0 om=0 f2d=0 f2q=0 ffo=0 ffod=0 io=0 ffoq=0 i2d=0 i2q=0 fod=0 foq=0 qm=0 c1=1 s1=0 !fin de las condiciones iniciales del modelo ¡condiciones iniciales del las variables del algoritmo de Gauss-Seidel dp=3.1d+17 d1p=2.2d+17 do l=1,zp qpp(l)=q(l) qp(l)=q(l) qpo(l)=q(l) end do n=n2 d=dp d1=d1p dl=dlc dlo=dlc x=0 s=0 bt=1d-12 p=2 q1=10*p**zp et=1d-12 mi=1d-5 ¡fin de las condiciones iniciales de las variables ¡del algoritmo de Gauss-Seidel ¡algoritmo de Gauss-Seidel 70 if (dabs(d1).lt.mi.or.dabs(dlo).lt.et) goto 750 ¡cálculo del modelo goto 115 ¡fin del cálculo del modelo ¡cálculo del índice de optimización para !el algoritmo de Gauss-Seidel
IPN-SEPI-ESIME-ELÉCTRICA 103
125 if(ion.gt.iom) then d1=l1*qm+l2*q2+wsp*dabs(omr/om1)+wsp else d1=l1*qm+l2*q2+wsp*dabs(omr/om1) end if !fin de cálculo del índice de optimización 390 print*,n,t,om,dl,d1,q2,qm,ion,i1n if (d.gt.d1) goto 430 print*,d do l=1,zp print*,qpo(l) end do goto 450 430 print*,d1 do l=1,zp print*,qp(l) qpo(l)=qp(l) end do 450 if (dabs(d-d1).lt.bt.or.dabs(dl).lt.bt/10000) goto 560 if (d1.ge.d) goto 520 if (s.eq.1) goto 500 s=1 x=x+1 dl=dl*p goto 690 500 s=0 goto 690 520 qp(n)=qp(n)-dl 550 dl=dl/p s=1 goto 690 560 if (dlo.gt.0) goto 565 if (x.ge.2.or.dl.ge.0) goto 590 goto 567 565 if (x.ge.2.or.dl.le.0) goto 590 567 qp(n)=qpo(n) 580 dl=-dlo goto 640 590 if (d.lt.d1) goto 650 600 if (n.eq.zp) goto 620 n=n+1 goto 630 620 n=1 630 if (n.eq.n2) then dlo=dlo/q1 else dlo=dlo*p end if 635 dl=dlo 640 s=0 x=0 goto 690 650 qp(n)=qpo(n) 680 goto 600 690 qp(n)=qp(n)+dl 720 if (d.gt.d1) then d=d1 end if 730 do l=1,zp
IPN-SEPI-ESIME-ELÉCTRICA 104
q(l)=qp(l) end do ¡condiciones iniciales del modelo 1n=0 ion=0 q2=0 fo=0 t=0 om=0 f2d=0 f2q=0 ffo=0 ffod=0 io=0 ffoq=0 i2d=0 i2q=0 fod=0 foq=0 qm=0 c1=1 s1=0 !fin de condiciones iniciales del modelo goto 70 750 print*,"*" 751 do l=1,zp print*,"valor del parametro nr.",l,"=",qpo(l) end do print*,"valor minimo del indice de optimizacion =",d print*,"Si quiere usar otra vez el algoritmo de Gauss-Seidel" print*,"escriba 1 y si no escriba 0" read*,zzt if(zzt.eq.1) then do zi=1,zp q(zi)=qpo(zi) end do goto 110 end if stop !fin del algoritmo de Gauss-Seidel 100 end
IPN-SEPI-ESIME-ELÉCTRICA 105
APÉNDICE E
E.1 DESCRIPCIÓN DEL ALGORITMO HÍBRIDO DE OPTIMIZACIÓN PARAMÉTRICA
En las figuras 1(a) y 1(b) se presenta el diagrama de flujo del algoritmo híbrido [34].
Cada uno de los dos algoritmos que componen el algoritmo híbrido, se pueden aplicar por separado o conjuntamente pero, en esta segunda opción, siempre hay que aplicar como primero el algoritmo genético y posteriormente el algoritmo de los cambios cíclicos de los parámetros. El algoritmo genético (Fig 1(a)) es un algoritmo genético clásico en el cual el usuario debe declarar la probabilidad del cruce y de la mutación, el número de los cromosomas, los valores límite de los parámetros optimizados, la exactitud de la presentación de los parámetros (el número de los dígitos después del punto flotante) y el número de las generaciones. El tiempo necesario para la búsqueda de los valores óptimos de los parámetros depende, sobre todo, del número de los cromosomas y del número de las generaciones declarados por el usuario. El número de los cromosomas y el número de las generaciones no pueden ser demasiado pequeños para que el algoritmo no se detenga en algún mínimo local (si los mínimos locales existen) o termine los cálculos no llegando al mínimo global. De otro lado, cuando más grande es el número de los cromosomas y el número de las generaciones, tanto más largo es el tiempo de la búsqueda del mínimo global. Para determinar el número adecuado de los cromosomas y de las generaciones se recomienda repetir varias veces la aplicación del algoritmo genético para resolver el problema de la optimización dado. En base a la exactitud de la presentación de los valores de los parámetros optimizados declarada por el usuario (el número “zq1” de los dígitos decimales después del punto flotante) y las limitaciones de cada uno de los parámetros declaradas por el usuario, el algoritmo genético establece el número de los dígitos binarios necesario para cada uno de los parámetros y, posteriormente, tomando en consideración el número de los parámetros optimizados declarado por el usuario, determina la longitud (el número de los bits) del cromosoma. Para establecer el número de los bits que representan el parámetro i-ésimo, el algoritmo genético calcula el número natural “zm” más pequeño que cumple la desigualdad siguiente:
1210)( 1 −≤− izmzqii zazb (E.1)
donde: zbi es el valor máximo del parámetro i-ésimo zai es el valor mínimo del parámetro i-ésimo. Para seleccionar la populación paterna (mating pool) de los cromosomas el algoritmo genético dispone de tres métodos de la selección: el método de rango (ranking selection), el método deterministico de torneo (deterministic tournament selection) con aplicación de la estrategia elitar que consiste en la introducción en la población paterna de un número determinado por el usuario de las copias del cromosoma mejor y el método de ruleta
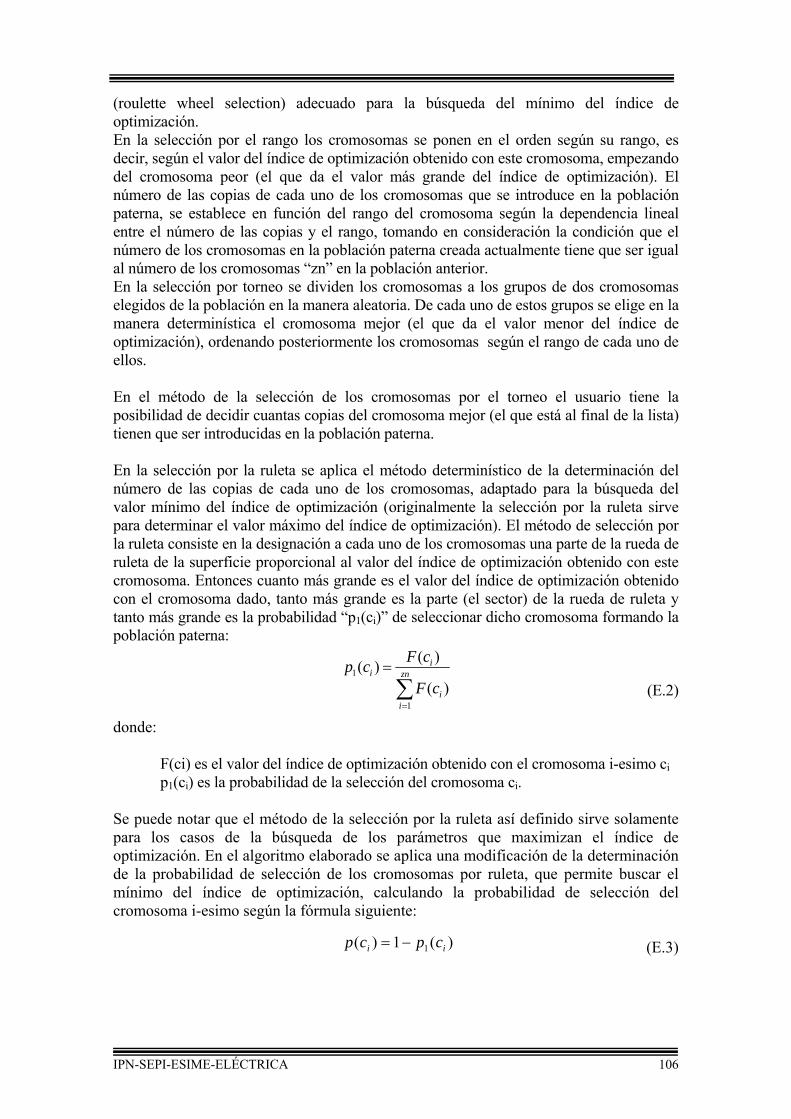
IPN-SEPI-ESIME-ELÉCTRICA 106
(roulette wheel selection) adecuado para la búsqueda del mínimo del índice de optimización. En la selección por el rango los cromosomas se ponen en el orden según su rango, es decir, según el valor del índice de optimización obtenido con este cromosoma, empezando del cromosoma peor (el que da el valor más grande del índice de optimización). El número de las copias de cada uno de los cromosomas que se introduce en la población paterna, se establece en función del rango del cromosoma según la dependencia lineal entre el número de las copias y el rango, tomando en consideración la condición que el número de los cromosomas en la población paterna creada actualmente tiene que ser igual al número de los cromosomas “zn” en la población anterior. En la selección por torneo se dividen los cromosomas a los grupos de dos cromosomas elegidos de la población en la manera aleatoria. De cada uno de estos grupos se elige en la manera determinística el cromosoma mejor (el que da el valor menor del índice de optimización), ordenando posteriormente los cromosomas según el rango de cada uno de ellos. En el método de la selección de los cromosomas por el torneo el usuario tiene la posibilidad de decidir cuantas copias del cromosoma mejor (el que está al final de la lista) tienen que ser introducidas en la población paterna. En la selección por la ruleta se aplica el método determinístico de la determinación del número de las copias de cada uno de los cromosomas, adaptado para la búsqueda del valor mínimo del índice de optimización (originalmente la selección por la ruleta sirve para determinar el valor máximo del índice de optimización). El método de selección por la ruleta consiste en la designación a cada uno de los cromosomas una parte de la rueda de ruleta de la superficie proporcional al valor del índice de optimización obtenido con este cromosoma. Entonces cuanto más grande es el valor del índice de optimización obtenido con el cromosoma dado, tanto más grande es la parte (el sector) de la rueda de ruleta y tanto más grande es la probabilidad “p1(ci)” de seleccionar dicho cromosoma formando la población paterna:
(E.2)
donde: F(ci) es el valor del índice de optimización obtenido con el cromosoma i-esimo ci p1(ci) es la probabilidad de la selección del cromosoma ci. Se puede notar que el método de la selección por la ruleta así definido sirve solamente para los casos de la búsqueda de los parámetros que maximizan el índice de optimización. En el algoritmo elaborado se aplica una modificación de la determinación de la probabilidad de selección de los cromosomas por ruleta, que permite buscar el mínimo del índice de optimización, calculando la probabilidad de selección del cromosoma i-esimo según la fórmula siguiente:
(E.3)
∑=
= zn
ii
ii
cF
cFcp
1
1
)(
)()(
)(1)( 1 ii cpcp −=

IPN-SEPI-ESIME-ELÉCTRICA 107
Fig. E.1a Diagrama de flujo del algoritmo híbrido de optimización paramétrica.
START
declarar el numero de losparametros para optimizar (zp)
¿Quieres aplicardirectamente el
algoritmo decambio ciclico delos parametros?
declarar los valoresiniciales de los
parametros q(1)...q(zp)
SI
110
declarar laprobabilidad de cruce y
de mutacion
declarar el numero delos cromosomas (zn)
declarar los valoreslimite de losparametros
declarar la exactitudde los calculos
2
declarar el numero delas generaciones (zg)
escoger el metodo dela seleccion de los
cromosomas:1 por el rango2 por el torneo3 por la ruleta
calcular la longitud delcromosoma en base ala exactitud declarada
(zg)
generar al azar laprimera poblacion de
(zn) cromosomas
calcular el valor (zx)de cada uno de los(zp) parametros en
cada uno de los (zn)cromosomas
10
condiciones inicialesdel modelo
solucion del modelomatematico para cada uno
de los (zn) cromosomastomando en consideracionlas limitaciones para losparametros y para lasvariables del modelo
115
calcular el indice deoptimizacion para cada
uno de los (zn)cromosomas
elegir el cromosoma mejory calcular los valores de
los parametroscorrespondientes a este
cromosoma
¿El numeroactual de lasgeneracioneses mayor o
igual a (zg)?
imprimir el valorminimo del indice de
optimizacion y losvalores de los
parametrosq(1)...q(zn)
SI
¿Quieresutilizar otra
vez elalgoritmogenetico?
calcular los nuevosvalores limite de los
parametros
2
SI ¿Quieresutilizar el
algoritmo decambio ciclico
de losparametros?
110
SI
STOP
NO
NO
memorizar los valores de losparametros actualmente mejores y
el valor minimo del indice deoptimizacion
ordenar a lo cromosomas segun surango empezando del cromosoma
que da el valor mas grande delindice de optimizacion
determinar el numero de las copiasde cada uno de los cromosomasutilizando el metodo de seleccion
elegido
formar la poblacion paterna
aplicar los operadores de cruce yde mutacion para obtener la nueva
poblacion
10
NO
NO
Fig.1(a)
memorizarq(1)....q(zn)

IPN-SEPI-ESIME-ELÉCTRICA 108
Fig. E.1b Diagrama de flujo del algoritmo híbrido de optimización paramétrica (continuación).
En el algoritmo presentado se determina el número de las copias del cromosoma i-esimo en la población paterna en la manera deterministica calculando el número de dichas
110
declarar el valor deincremento (dlc) inicial
de los parametros
declarar primerparametro para
calcular (N2)
declarar los valores iniciales de lasvariables y de las constantes del
algoritmo de cambio ciclico de losparametros: bt,et,mt,d,d1,
dl=dlc,dlo=dlc,S=0,x=0, para N=1hasta zn: qp(N)=q(N),qpo(N)=q(N)
condiciones inicialesdel modelo
|dlo|<et
imprimir el valorminimo del indice de
optimizacion y losvalores de los
parametros
SI
¿Quieresaplicar otra
vez elalgoritmo de
cambio ciclicode los
parametros
Solucion del modelomatematico para el
conjunto actual de losvalores de los
parametros
115
NO
calcular el indicede optimizacion
(d1)STOP
NO
110
SI
d>d1 or|dl|<mt
qpo=qp para todos losparametros
SI
|d-d1|<bt
NO
II
SI
I
NO
I
d1>=d
qp(N)=qp(N)-dl
SI
dl=dl/2, S=1
qp(N)=qp(N)+dl
d>d1
d=d1
SI
q(1)=qp(1)...q(zp)=qp(zp)
NO
II
dlo>0
x>=2 ordl>=0
dl<=0 orx>=2
d<d1
SI
SI
qp(N)=qpo(N)
NO
NO
NO
SI
qp(N)=qpo(N)
N=zp
dl=-dl
N=1N=N+1
SI
NO
SINO
dlo=dlo/q1
N=N2 SI
dl=dlo
Fig.1(b)
S=1
dl=dl*2S=1,x=x+1
S=0
NO
NO SI
dlo=dlo*2
NO
S=0,x=0
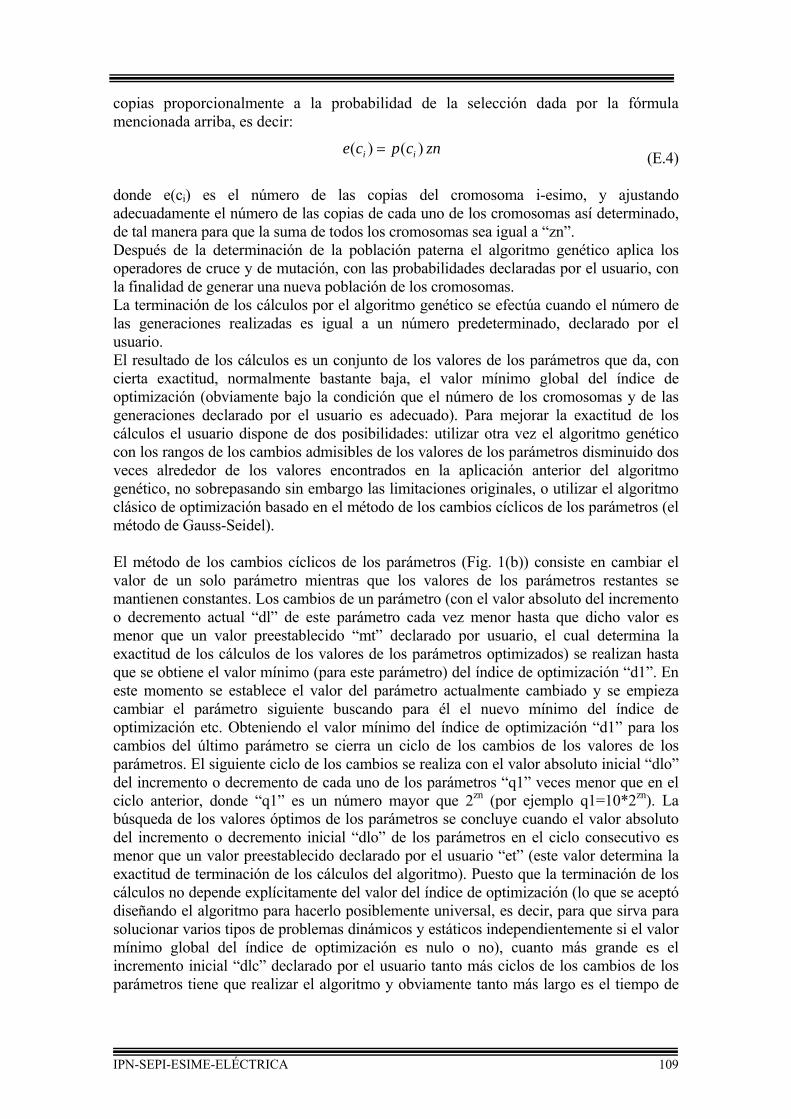
IPN-SEPI-ESIME-ELÉCTRICA 109
copias proporcionalmente a la probabilidad de la selección dada por la fórmula mencionada arriba, es decir:
(E.4) donde e(ci) es el número de las copias del cromosoma i-esimo, y ajustando adecuadamente el número de las copias de cada uno de los cromosomas así determinado, de tal manera para que la suma de todos los cromosomas sea igual a “zn”. Después de la determinación de la población paterna el algoritmo genético aplica los operadores de cruce y de mutación, con las probabilidades declaradas por el usuario, con la finalidad de generar una nueva población de los cromosomas. La terminación de los cálculos por el algoritmo genético se efectúa cuando el número de las generaciones realizadas es igual a un número predeterminado, declarado por el usuario. El resultado de los cálculos es un conjunto de los valores de los parámetros que da, con cierta exactitud, normalmente bastante baja, el valor mínimo global del índice de optimización (obviamente bajo la condición que el número de los cromosomas y de las generaciones declarado por el usuario es adecuado). Para mejorar la exactitud de los cálculos el usuario dispone de dos posibilidades: utilizar otra vez el algoritmo genético con los rangos de los cambios admisibles de los valores de los parámetros disminuido dos veces alrededor de los valores encontrados en la aplicación anterior del algoritmo genético, no sobrepasando sin embargo las limitaciones originales, o utilizar el algoritmo clásico de optimización basado en el método de los cambios cíclicos de los parámetros (el método de Gauss-Seidel). El método de los cambios cíclicos de los parámetros (Fig. 1(b)) consiste en cambiar el valor de un solo parámetro mientras que los valores de los parámetros restantes se mantienen constantes. Los cambios de un parámetro (con el valor absoluto del incremento o decremento actual “dl” de este parámetro cada vez menor hasta que dicho valor es menor que un valor preestablecido “mt” declarado por usuario, el cual determina la exactitud de los cálculos de los valores de los parámetros optimizados) se realizan hasta que se obtiene el valor mínimo (para este parámetro) del índice de optimización “d1”. En este momento se establece el valor del parámetro actualmente cambiado y se empieza cambiar el parámetro siguiente buscando para él el nuevo mínimo del índice de optimización etc. Obteniendo el valor mínimo del índice de optimización “d1” para los cambios del último parámetro se cierra un ciclo de los cambios de los valores de los parámetros. El siguiente ciclo de los cambios se realiza con el valor absoluto inicial “dlo” del incremento o decremento de cada uno de los parámetros “q1” veces menor que en el ciclo anterior, donde “q1” es un número mayor que 2zn (por ejemplo q1=10*2zn). La búsqueda de los valores óptimos de los parámetros se concluye cuando el valor absoluto del incremento o decremento inicial “dlo” de los parámetros en el ciclo consecutivo es menor que un valor preestablecido declarado por el usuario “et” (este valor determina la exactitud de terminación de los cálculos del algoritmo). Puesto que la terminación de los cálculos no depende explícitamente del valor del índice de optimización (lo que se aceptó diseñando el algoritmo para hacerlo posiblemente universal, es decir, para que sirva para solucionar varios tipos de problemas dinámicos y estáticos independientemente si el valor mínimo global del índice de optimización es nulo o no), cuanto más grande es el incremento inicial “dlc” declarado por el usuario tanto más ciclos de los cambios de los parámetros tiene que realizar el algoritmo y obviamente tanto más largo es el tiempo de
zncpce ii )()( =
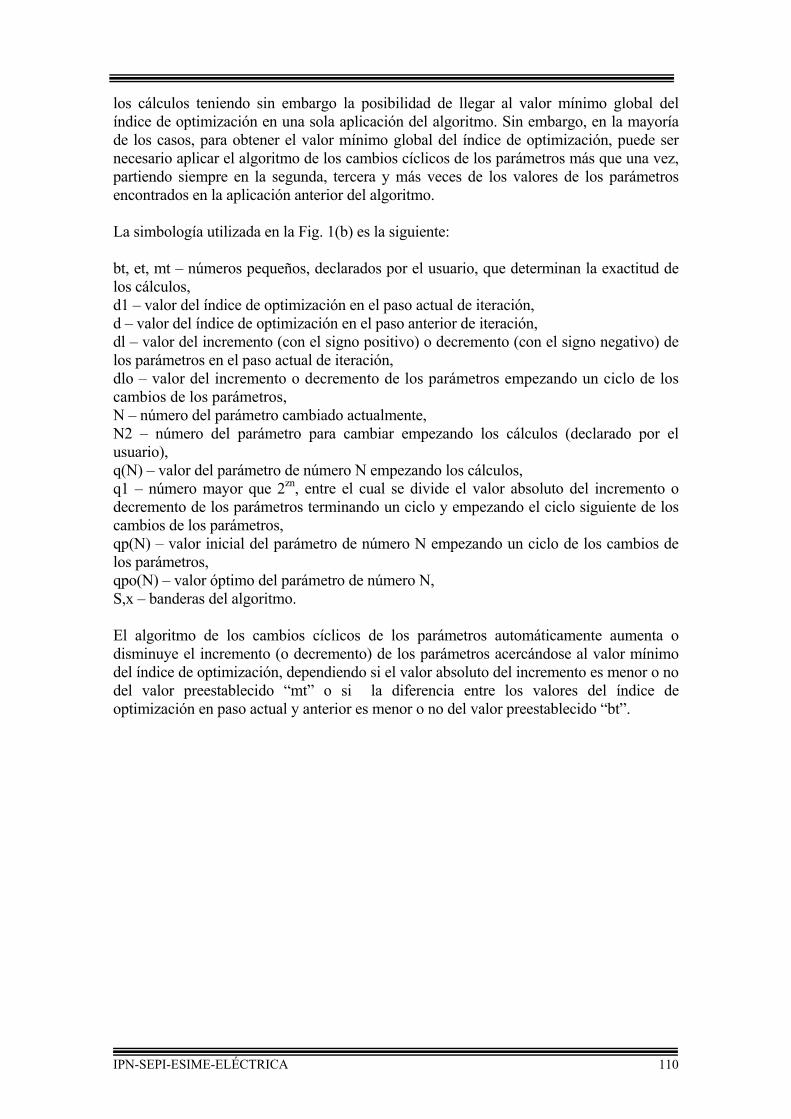
IPN-SEPI-ESIME-ELÉCTRICA 110
los cálculos teniendo sin embargo la posibilidad de llegar al valor mínimo global del índice de optimización en una sola aplicación del algoritmo. Sin embargo, en la mayoría de los casos, para obtener el valor mínimo global del índice de optimización, puede ser necesario aplicar el algoritmo de los cambios cíclicos de los parámetros más que una vez, partiendo siempre en la segunda, tercera y más veces de los valores de los parámetros encontrados en la aplicación anterior del algoritmo. La simbología utilizada en la Fig. 1(b) es la siguiente: bt, et, mt – números pequeños, declarados por el usuario, que determinan la exactitud de los cálculos, d1 – valor del índice de optimización en el paso actual de iteración, d – valor del índice de optimización en el paso anterior de iteración, dl – valor del incremento (con el signo positivo) o decremento (con el signo negativo) de los parámetros en el paso actual de iteración, dlo – valor del incremento o decremento de los parámetros empezando un ciclo de los cambios de los parámetros, N – número del parámetro cambiado actualmente, N2 – número del parámetro para cambiar empezando los cálculos (declarado por el usuario), q(N) – valor del parámetro de número N empezando los cálculos, q1 – número mayor que 2zn, entre el cual se divide el valor absoluto del incremento o decremento de los parámetros terminando un ciclo y empezando el ciclo siguiente de los cambios de los parámetros, qp(N) – valor inicial del parámetro de número N empezando un ciclo de los cambios de los parámetros, qpo(N) – valor óptimo del parámetro de número N, S,x – banderas del algoritmo. El algoritmo de los cambios cíclicos de los parámetros automáticamente aumenta o disminuye el incremento (o decremento) de los parámetros acercándose al valor mínimo del índice de optimización, dependiendo si el valor absoluto del incremento es menor o no del valor preestablecido “mt” o si la diferencia entre los valores del índice de optimización en paso actual y anterior es menor o no del valor preestablecido “bt”.