Rseumen Calculo III I1 2015-1
6
Resumen: Vector Calculus (MAT1630, 2015-1) Juyoung Wang Pontificia Universidad Catolica de Chile Seccion I: Derivadas parciales 1: Funciones de varias variables Funcion de n variables Sea A el dominio de una funcion f , lo llamaremos como una funcion de n variables, si (x 1 , ··· , x n ) ∈ U ⊂ R n con n > 1. Se denota mediante la siguiente notacion: f : U ⊂ R n → R (1) • Grafico de f : Sea f : U ⊂ R n , definiremos el grafico de f como el subconjunto de R n+1 y lo denotaremos como: Gra f ( f )= {(x 1 , ··· , x n , f (x 1 , ··· , x n )) ∈ R n+1 |(x 1 , ··· , x n ) ∈ R n } (2) Figure 1: Curva de nivel de R 2 • Conjunto de nivel: Sea f : U ⊂ R n → R y sea c ∈ R, entonces el conjunto de nivel del valor c se define como aquellos puntos x ∈ U para los cuales f (x)= c. {x ∈ U | f (x)= c ⊂ R n } (3) Page 1 of 6
-
Upload
juyoung-wang -
Category
Documents
-
view
216 -
download
3
Transcript of Rseumen Calculo III I1 2015-1

Resumen: Vector Calculus (MAT1630, 2015-1)Juyoung Wang
Pontificia Universidad Catolica de Chile
Seccion I: Derivadas parciales
1: Funciones de varias variables
Funcion de n variables
Sea A el dominio de una funcion f , lo llamaremos como una funcion de n variables, si (x1, · · · ,xn) ∈U ⊂Rn con n > 1. Se denota mediante la siguiente notacion:
f : U ⊂ Rn→ R (1)
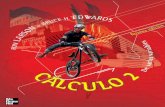
• Grafico de f :Sea f : U ⊂ Rn, definiremos el grafico de f como el subconjunto de Rn+1 y lo denotaremos como:
Gra f ( f ) = {(x1, · · · ,xn, f (x1, · · · ,xn)) ∈ Rn+1|(x1, · · · ,xn) ∈ Rn} (2)
Figure 1: Curva de nivel de R2
• Conjunto de nivel:Sea f : U ⊂ Rn→ R y sea c ∈ R, entonces el conjunto de nivel del valor c se define como aquellospuntos x ∈U para los cuales f (x) = c.
{x ∈U | f (x) = c⊂ Rn} (3)
Page 1 of 6

Limites y continuidad
• Conjunto abierto:Sea U ⊂ Rn, decimos que es un conjunto abierto, cuando:
∀x0 ∈U,∃r > 0 | Br(x0) ∈U (4)
donde:
– Br(x0) es el interior de una bola de radio r con su centro en x0. Se define como el conjunto detodos los puntos x tales que ‖x− x0‖< r. Es decir, no incluye el borde.
– ∂A es la frontera del conjunto A.
Figure 2: Disco abierto de radio r
y por convencion, diremos que un conjunto vacio es un conjunto abierto.
• Limite:Sea f : U ⊂ Rn→ R, donde U es conjunto abierto, sea x0 un punto en U o en su frontera, y sea Vuna vecindad de b ∈ R, decimos que f esta eventualmente en V con x tendiendo a x0, si existe unavecindad A de x0 tal que x 6= x0,x ∈ A y entonces x ∈U implica f (x) ∈V . Dicho de manera massimple, podemos decir que f (x) tiende a b.
limx→x0
f (x) = b (5)
– Teorema de unicidad de limite:
Si limx→x0
f (x) = b1∧ limx→x0
f (x) = b2⇒ b1 = b2. (6)
– Argumento Epsion Delta para el limite de una funcion de varias variables:Sea f : A⊂ Rn→ R una funcion dada, entonces f es continua, ssi:
∀ε > 0,∃δ > 0 | (x ∈ A∧‖x− x0‖< δ )⇒‖ f (x)− f (x0)‖< ε (7)
– Propiedades del limite:Sean f : A⊂ Rn y g : A⊂ Rn, con x0 ∈ (A∨∂A), con limx→x0 f (x) = b1 y limx→x0 g(x) = b2entonces:
∗ limx→x0( f (x)±g(x)) = b1±b2
∗ limx→x0 f (x) ·g(x) = b1 ·b2
∗ limx→x0f (x)g(x) =
b1b2
, ssi b2 6= 0
∗ c · limx→x0 f (x) = c ·b1, donde c ∈ R.
Page 2 of 6

• Continuidad:Sea x0 ∈ D, sea f : D⊆ Rn→ R una funcion y D un conjunto abierto, diremos que f es continuaen x0 si:
limx→x0
f (x) = f (x0) (8)
Utilizando esto, podemos definir la siguiente propiedad: Sea f ∧g funciones continua en x0 ∈ Dcon f : D⊆ Rn→ R, entonces:
– f ±g tambien es continua en x0.
– f ·g tambien es continua en x0.
– fg tambien es continua en x0, ssi g(x0) 6= 0.
• Tecnicas para verificar la existencia del limite:Primeramente, deberiamos verificar si los valores de los limites iterados son distintos:
lim(x,y)→(x,0)
f (x,y) ∧ lim(x,y)→(0,y)
f (x,y) (9)
– Si son distintos: No existe el limite.
– Si son iguales:
∗ Usar y = kx ∨ y = xm.
∗ Usar una conversion adecuada, haciendo que no sea cero, el valor del denominador, comopor ej: (tn, tm),(tn− t, t),etc.
∗ Usar Teorema de Sandwich.
∗ Usar coordenadas polares: Si logramos obtener algun valor definido mediante estaconversion, entonces el limite tendra ese valor. Sino, no podemos afirmar nada acerca dellimite.
x = r · cos(θ) ∧ y = r · sin(θ) (10)
∗ Usar el argumento ε y δ .
Page 3 of 6

Diferenciabilidad
• Derivada parcial:Sean U ⊂ Rn un conjunto abierto y f : U ⊂ Rn → R una funcion con valores reales, entoncesdefiniremos la derivada parcial de f respecto a j-esimo variable como:
fx j(x1. · · · ,x j, · · · ,xn) =∂ f∂x j
(x1. · · · ,x j, · · · ,xn) = limh→0
f (~x+h · e j)− f (~x)h
(11)
y esto lo podemos calcular, tomando las variables distintas de x j como constantes.
– Gradiente:Se define como un vector compuesto por las derivadas parciales de las variables de una funcionf : Rn→ R.
∇ f = [∂ f∂x1
, · · · , ∂ f∂xn
] (12)
∗ Propiedad: Sea z = f (x,y) = p(x)+q(y)+r(x,y) una funcion, esto lo podemos despejarde manera que S : p(x)+ q(y)+ r(x,y)− z = 0. De esta manera, definiremos la nuevafuncion F(x,y,z) = p(x)+ q(y)+ r(x,y)− z, donde S es una superficie de nivel de lafuncion F con c = 0. Con esto, podemos afirmar que:
∇F(x0,y0,z0) =⊥ S (13)
Es decir, ∇F es el vector normal de la superficie S.
– Tecnica para evaluar la diferenciabilidad y la continuidad de una funcion:
∗ Para una funcion no cortada:Basta con verificar si en todos los puntos, sus derivadas parciales son continuas.
∗ Para una funcion cortada:Para que una funcion sea diferenciable en el punto (x0,y0), debe satisfacer las siguientescondiciones:
· Condicion 1: ∃ fx∧ fy
· Condicion 2:
lim(h,k)→(0,0)
f (x0 +h,y0 + k)− f (x0,y0)−h · ∂ f∂x (x0,y0)− k · ∂ f
∂y (x0,y0)√
h2 + k2= 0 (14)
Para ver si una funcion es continua en un punto dado, tenemos que calcular el limitede esa funcion respecto al punto dado.
∗ Propiedades:Si f ,g son diferenciables en (x0,y0), entonces:
· f ±g ∧ f ·g son diferenciables en (x0,y0).
· fg es diferenciable en (x0,y0), ssi g(x0,y0) 6= 0
∗ Resumen:
fx∧ fy continuas→ f es diferenciable→ f es continua.Satisface la Condicion 1 y la Condicion 2→ f es diferenciable.
f no es continua→ f no es diferenciable.
Esta relacion es unidireccional. No cumple hacia el otro lado.
Page 4 of 6

– Teorema de Schwartz (O de Clairaut):Sea f una funcion de clase C 2, entonces:
fxy = fyx (15)
donde:
fxy =∂
∂y∂ f∂x
=∂ 2 f
∂y∂x∧ fyx =
∂
∂x∂ f∂y
=∂ 2 f
∂x∂y(16)
– Plano tangente en 3D:Sean fx j =
∂ f∂x j
continuas ∀ j ∈ N, sea t el vector tangente a la curva C de f parametrizados,definiremos el plano tangente al punto P(x0,y0,z0) como:
z = f (x0,y0)+ [∂ f∂x
(x0,y0)] · (x− x0)+ [∂ f∂y
(x0,y0)] · (y− y0) (17)
o tambien lo podemos escribir como:
∇F(x0,y0,z0) · (x− x0,y− y0,z− z0) = ( fx, fy,−1) · (x− x0,y− y0,z− z0) (18)
donde F(x0,y0,z0) es una funcion que tiene la funcion f como su superficie de nivel.
• Derivada direccional:Sea f : D⊆ Rn→ R, se define la derivada de f en la direccion del vector~v en el punto ~x0 como:
ddx
f (x0 + t~v)∣∣∣t=0
= ∇ f (~x0) · v̂ = ‖∇ f (~x0)‖ · ‖v̂‖ · cos(α). (19)
y dado que el valor de ‖∇ f (~x0)‖ ∧ ‖v̂‖ son fijas, esto tomara su maximo valor cuando cos(α) = 1.Es decir, la derivada direccional de una funcion tomara su maximo valor, cuando el sentido delvector dado y el sentido del gradiente de la funcion son iguales.
Page 5 of 6

• Maximos y minimos:Sea ~x0 un punto critico, donde ∇ f (~x0) = 0, podemos calcular si es maximo local o minimo local deuna funcion f : D⊆ Rn→ R, verificando si cumplen con las siguientes condiciones:
Sea H una matriz Hessiana:
H =
(fxx fxy
fyx fyx
)(20)
Minimo local: ∇ f~x0 =~0 ∧ fxx(P0)> 0 ∧ det(H(P0))> 0Maximo local: ∇ f~x0 =~0 ∧ fxx(P0)< 0 ∧ det(H(P0))> 0Punto silla: det(H(P0))< 0
– Tecnicas para buscar maximos y minimos:
∗ Analizar en el interior de la funcion, buscando los puntos criticos, y luego, revisar lamatriz Hessiana.
∗ Buscar en la frontera de la funcion. Para esto, tenemos que parametrizar la frontera enuna variable.
– Metodo de Lagrange:Sea f : D⊆Rn→R una funcion de clase C 2, sea S : {g(~(x0)) = c} una superficie o una curvade nivel, sea x0 ∈ D un punto tal que g(x0) = c, con ∇g(x0) 6=~0,
Si f |S( f restringida en S) posee un maximo o un minimo local en x0, entonces se tieneque:
∇ f (~x0) = λ ·∇g(~x0) (21)
donde λ es el Multiplicador de Lagrange.
Este metodo nos permite encontrar los maximos y los minimos de una funcion restringidapor la otra. Sin embargo, mediante esta manera, no podemos saber la cantidad de los puntoscriticos que podemos calcular mediante la ecuacion dada.
∗ Teorema:Si f |S posee un maximo o un minimo en el punto ~x0, entonces ∇ f (~x0)⊥ S en el punto ~x0.
Figure 3: Explicacion grafica del metodo de Lagrange
Page 6 of 6