Sistemas con Retardos: Una Introducción XVI Congreso ...
100
Sistemas con Retardos: Una Introduccin XVI Congreso Latinoamericano de Control AutomÆtico Sabine MondiØ [email protected] . . Departamento de Control AutomÆtico CINCVESTAV, IPN MØxico D.F. 14 de Octubre de 2014 S. MondiØ (CLCA 2014) 14 de Octubre de 2014 1 / 103
Transcript of Sistemas con Retardos: Una Introducción XVI Congreso ...

Sistemas con Retardos: Una Introducción
XVI Congreso Latinoamericano de Control Automático
Sabine Mondié[email protected]
.
.
Departamento de Control AutomáticoCINCVESTAV, IPNMéxico D.F.
14 de Octubre de 2014
S. Mondié (CLCA 2014) 14 de Octubre de 2014 1 / 103

Organización general de la ponencia
I. Introducción general: presencia de retardos en sistemas y procesos,modelado y marco teórico, propiedades fundamentales, fenómenosparticulares
II. Análisis en el dominio de la frecuencia: ecuación característica(cuasipolinomio), estabilidad, método de D-particiones, métodos gráficos
III. Análisis de Lyapunov en el dominio del tiempo: Resultadosfundamentales, funcionales predeterminadas, funcionales de tipo completo
IV. Control de sistemas con retardos en la entrada: sin retardo en el estado,en estado y entrada, predictores
S. Mondié (CLCA 2014) 14 de Octubre de 2014 2 / 103

I: Introducción general
Motivación: presencia de retardos en los sistemas y procesos
Ejemplos ilustrativos
Modelado de sistemas con retardos
Conceptos y propiedades fundamentales
Fénomenos particulares en los sistemas con retardos
S. Mondié (CLCA 2014) 14 de Octubre de 2014 3 / 103

Presencia de retardos en los sistemas dinámicos
Retardos en la entrada y/o salida:
1 Tiempo de medición2 Tiempo de calculo3 Transporte4 Deliberado
Retardos en el estado1 Lazo cerrado de un sistema con retardo en la entrada2 Estructura del sistema: interconeciones, transporte, tiempo de maduración
Retardos por modelado de ecuaciones diferenciales parciales
S. Mondié (CLCA 2014) 14 de Octubre de 2014 4 / 103

Ejemplo: Modelo de balanceo de una regla
Modelo de balanceo:x(t)− 6g
l x(t) = u(t)
l : largo del péndulog : aceleración de la gravedad
Control:u(t) = k1x(t− h) + k2 x(t− h)
k1, k2 : ganancia prop. y deriv.x : posisión angularh ∼ 0,1s : tiempo de reflejo
I Aprendizaje consiste en ajustar las ganancias k1 y k2,I Cualquiera (casi...) logra balancear un palo de 30 cm o mas,I Es mas fácil balancear palos mas largos (escoba). Es imposible balancear unlápiz.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 5 / 103

Ejemplo: Modelo de transplante en leucemia
Células cancerosas del huésped: CCélulas anticancerosas del donador: T
Las interraciones toman tiempo: RETARDOS!!!!υ : tpo. de recuperación de cel. T σ : tpo. de interacción sin reacciónτ : tpo. de division celular ρ : tpo. de interacción cel. T
S. Mondié (CLCA 2014) 14 de Octubre de 2014 6 / 103

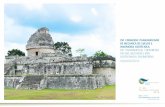
Ejemplo: Modelo de un sistema de perforación
Ecuación de onda:(modelo de parámetros distribuidos)GJ ∂2v
∂ξ2 (ξ, t)− I ∂2v∂t2 (ξ, t) = 0,
ξ ∈ (0, L), t > 0
con condiciones de frontera:v(0, t) = Ωt;
GJ ∂v∂ξ (L, t) + IB
∂2v∂t2 (L, t) = −T (t)
v(ξ, t) : ángulo de rotaciónT : torque en el extremo inferiorΩ : vel. angular en superficieL, IB, β, I, G, J : parámetros mecánicos
S. Mondié (CLCA 2014) 14 de Octubre de 2014 7 / 103

Ejemplo: Modelo de un sistema de perforación
Transformación de D’Alembert o análisis frecuencial:Nuevo modelo: Sistema con retardos de tipo neutral
w(t)− w(t− 2Γ) +√
IGJIB
·w(t) +
√IGJIB
·w(t− 2Γ) =
− 1IB
T(t) +1IB
T(t− 2Γ) +2√
IGJIB
Ω(t− Γ).
dondew(t) = v(L, t) : ángulo de rotación en el extremo inferior,Γ =
√I
GJ L : retardo base introducido por la transformación.
Este modelo permite:I una descripción exacta de las principales variables de interésI hacer simulaciones de manera sencillaI diseñar estrategias de control utilizando la teoría de sistemas con retardos.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 8 / 103

Ejemplo: Avance de herramienta de corte (torno)
my(t) + cy(t) + ky(t) = −Ft ( f + y(t)− y(t− h))y(t) : posición de herramienta
ω : Velocidad angular constante
f : Velocidad de avance por revolución
m, k y c: masa, rigidez y amortiguamientoh = 2π/ω : retardo del sistema
Ft : Fuerza que depende explícitamentedel estado presente y pasado
S. Mondié (CLCA 2014) 14 de Octubre de 2014 9 / 103

Ejemplo: Proceso de deshidratado de tomate
Es una camára herméticamente cerrada con un tunel de viento y un tubo querecicla el aire caliente dentro del sistema.
Las partes principales son:
Actuador: una rejilla elétricausada como fuente decalentamiento
Controlador
Sensor de temperatura
Un ventilador que produceun flujo de aire constante
Sistema de adquisición yalmacenamiento de datos
S. Mondié (CLCA 2014) 14 de Octubre de 2014 10 / 103

Ejemplo: Proceso de deshidratado de tomate
El tubo de recirculación de aire caliente induce un retardo en el estado, por lo queel sistema escalar es modelado como sigue
x(t) = a0x(t) + a1x(t− h) + bu(t) + f (x(t), x(t− h)),
donde:
el estado x(t) es el valor de la temperatura,la entrada de control u(t) es el voltaje aplicado a la rejilla eléctrica,la función no lineal f (·) representa las dinámicas no lineales presentes en elsistema. Se supone de forma polinomial
f (x(t), x(t− h)) = cx2(t) + dx2(t− h) + ex3(t) + kx3(t− h)
y satisface la condición de Lipschitz
‖ f (x(t), x(t− h))‖ ≤ α ‖x(t)‖+ β ‖x(t− h)‖ .
Los parámetros del modelo son estimados con el método de mínimoscuadrados recursivo.S. Mondié (CLCA 2014) 14 de Octubre de 2014 11 / 103

Modelado de sistemas con retardos
Sistemas con un retardo o retardos multiples
.x(t) = A0x(t) + A1x(t− h), h: retardo.
x(t) =m
∑i=0
Aix(t− hi)
retardos conmensurables: cuando los hi son múltiples de un retardo elemental(hi = kih, i = 1, m y ki enteros positivos)
Sistemas con retardos distribuidos
x(t) = A0x(t) + A1x(t− h) +∫ 0
−hG(θ)x(t+ θ)dθ
G(θ), θ ∈ [−h, 0] : función de distribución
S. Mondié (CLCA 2014) 14 de Octubre de 2014 12 / 103

Sistemas de tipo neutral
x(t) + C1 x(t− h) =ddtx(t) + C1x(t− h) = A0x(t) + A1x(t− h)
Ecuaciones en diferencias y ecuaciones integrales
x(t) = C1x(t− h1) + C2x(t− h2); x(t) =∫ 0
−hG(θ)x(t+ θ)dθ;
Sistemas controlados
.x(t) = A0x(t) + A1x(t− h) + Bu(t− τ),
h : retardo en el estado
τ : retardo en la entrada
Sistemas nolineales, variantes en el tiempo, periódicos.....
.x(t) = F(t, x(t), x(t− h));
.x(t) = F(t, xt); xt := x(t+ θ), θ ∈ [−h, 0].
S. Mondié (CLCA 2014) 14 de Octubre de 2014 13 / 103

Marco teórico:
.x(t) = F(t, xt); xt := x(t+ θ), θ ∈ [−h, 0]
Ecuaciones diferenciales funcionales :F es función de funciones (dimensióninfinita)
Ecuaciones diferenciales en diferencias :Son combinacíon de ecuacionesdiferenciales y de ecuación en diferencias
Belman R. and K. Cooke, Differential, difference equations, Academic Press,1963.
Elgoltz, L.E., Introduction to the theory of differential equations withdeviating arguments, Holden-Day, San Francisco, CA, 1966.
Hale, J. K. Introduction to functional differential equations, Springer Verlag,New York, 1993.
Kolmanovskii, V. B. y V. R. Nosov, Stability of Functional DifferentialEquations, Mathematics in Science and Eng., 180, Academic Press, NewYork, 1996.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 14 / 103

Alcances y limitaciones del curso
Este curso esta enfocado principalmente al estudio de sistemas lineales conun retardo
.x(t) = A0x(t) + A1x(t− h)
Se pretende cubrir temas fundamentales de la teória de sistemas con retardos
Se presentan ejemplos y casos de estudio que ilustran la temática
Se discute el estado del arte al dia de hoy, en los temas abordados
Los temas presentados son el producto de una selección parcial, ya queexisten muchos otros enfoques y resultados fundamentales.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 15 / 103

Condiciones iniciales, Concepto de estado
.x(t) = A0x(t) + A1x(t− h), h: retardo.
Condiciones iniciales: x(θ) = ϕ(θ), θ ∈ [−h, 0],ϕ función continua a pedazos definida en [−h, 0]
Estado del sistema:información mínima paracontinuar la trajectoría
xt := x(t+ θ), θ ∈ [−h, 0].
Su norma:
‖xt‖h = supθ∈[−h,0]
‖x(t+ θ)‖
S. Mondié (CLCA 2014) 14 de Octubre de 2014 16 / 103

Existencia y unicidad de soluciones
Para ciertos sistemas, la prueba es por construcción:
x(t) = F(x(t), x(t− h)),x(θ) = ϕ(θ), θ ∈ [−h, 0],
En el intervalo de tiempo [0, h], se tiene que x(t− h) ∈ [−h, 0], por lo que
x(t) = F(x(t), ϕ(t− h)),x(0) = ϕ(0),
Ecuación diferencial ordinaria con condición inicial conocida:
bajo ciertas condiciones sobre F (continuidad, Lipschitz), la soluciónx(t), t ∈ [0, h] existe y es única.Se repite el proceso en t ∈ [h, 2h] y sucesivamente.
Este es el método de construcción llamado "paso a paso"
S. Mondié (CLCA 2014) 14 de Octubre de 2014 17 / 103

EjemploSea el sistema con retardo descrito por
x(t) = x(t− 1)
con condición inicialx(t) = 1, t ∈ [0, 1].
Paso 1: t ∈ [1, 2]
x(t) = x(t− 1) = 1
x(t) = x(1) +∫ t
11ds = x(1) + s|t1 = 1+ (t− 1) = t
y se repite el proceso en el intervalo t ∈ [2, 3], empleando como condición inicial elresultado del paso anterior.
I Por construcción, la solución existe y es única!
S. Mondié (CLCA 2014) 14 de Octubre de 2014 18 / 103

EjemploEn este caso sencillo, se conoce la solución por inducción:
x(t) = x(t− 1)x(t) = 1, t ∈ [0, 1].
x(t) = ∑Nj=0
(t−j)j
j! , t ∈ [N, N + 1],N = 0, 1, 2, ...
I Para sistemas en general:Bajo la suposición de que la funcional F es Lipschitz, se establece la existencia yunicidad gracias al Teorema del punto fijo
S. Mondié (CLCA 2014) 14 de Octubre de 2014 19 / 103

Continuidad de soluciones
LemaConsidere el sistema con retardo
y(t) = F(t, yt), y(θ) = ϕ(θ), θ ∈ [−h, 0]
y el sistema perturbado
x(t) = F(t, xt) + g(t, xt), x(θ) = ψ(θ), θ ∈ [−h, 0]
I la funcional F es Lipschitz : ‖F(t, ϕ)− F(ψ, t)‖ ≤ L ‖ϕ− ψ‖h , L ∈ R
positiva),I la funcional g es acotada : g(t, xt) ≤ m.entonces las soluciones x(t) y y(t), t ≥ 0 satisfacen la desigualdad
‖x(t1, ψ)− y(t1, ϕ)‖h ≤ ‖ψ− ϕ‖h eLt +mL(eLt − 1)
Continuidad ante perturbaciones en las condiciones inicialesContinuidad con respeto a perturbaciones aditivas acotadas.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 20 / 103

Fenómenos típicos de los sistemas con retardos
Al contrario de lo que ocure en los sistemas libres de retardos,
Las soluciones no se pueden continuar hacia el pasado
Para condiciones iniciales distintas, pueden haber cruces, más aun, colapso detrajectorias
S. Mondié (CLCA 2014) 14 de Octubre de 2014 21 / 103

II: Análisis en el dominio de la frecuencia(Unicamente para sistemas lineales !)
Fundamentos: Orden exponencial, Matriz fundamental, formula de Cauchy,
Ecuación característica: cuasipolinomios
Método de D-particiones
Métodos gráficos
S. Mondié (CLCA 2014) 14 de Octubre de 2014 22 / 103

Recordatorio: Caso libre de retardos
El sistema libre de retardos
x = Ax, x(0) = x0
tiene transformada de Laplace:
sx(s) + x0 = Ax(s) =⇒ (sI − A)x(s) = x0
Su matriz fundamental esta dada por la transformada inversa de Laplace deK(s) = (sI − A)−1
K(t) = eAt con K(0) = I
La formula de Cauchy esx(t) = eAtx0
El sistema libre de retardos es asíntoticamente estable si las raíces de su polinomiocaracteristico det(sI − A) tienen parte real estrictamente negativa.El estudio de estas raíces en el dominio de la frecuencia esta ampliamentedocumentado
S. Mondié (CLCA 2014) 14 de Octubre de 2014 23 / 103

Orden exponencial de soluciones
LemaLa soluciones del sistema:
x(t) =m
∑i=0
Aix(t− hi) + f (t), f (t) ≤ m1eαt, t ≥ 0
son tales que
‖x(t)‖ ≤(
m0 +m1
|α− L|
)emax(α,L)t
donde L = ∑mj=0∥∥Aj
∥∥ y m0 = ‖x(0)‖+ L∫ 0−hm ‖x(θ)‖ dθ.
I El resultado se muestra empleando el Lema de Belman GronwallI Las soluciones tienen cota exponencial independiente de la c.i.I Para f (t) ≡ 0, la cota exponencial es L = ∑m
j=0∥∥Aj
∥∥. Todas las raíces tienenparte real menor que L.I Se puede calcular la transformada de Laplace del sistema
S. Mondié (CLCA 2014) 14 de Octubre de 2014 24 / 103

Transformada de Laplace
x(t) =m
∑i=0
Aix(t− hi), x(θ) = ϕ(θ), θ ∈ [−h, 0] (1)
Lx(t) = lıma→∞
∫ a
0x(t)e−stdt = sx(s)− x(0, ϕ) = sx(s)− ϕ(0)
Lx(t− hj) = lıma→∞
∫ a
0x(t− hj)e−stdt = x(s)e−hjs +
∫ 0
−hj
e−s(θ+hj)ϕ(θ)dθ
La transformada de Laplace del sistema (1) es
sx(s)− ϕ(0) =m
∑k=0
Ak
(x(s)e−hks +
∫ 0
−hk
e−s(θ+hk)ϕ(θ)dθ
).
o bien:
(sI −
m
∑k=0
Aje−hks
)x(s) = ϕ(0) +
m
∑k=0
Aj
∫ 0
−hj
e−hj(s+θ)ϕ(θ)dθ.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 25 / 103

Matriz fundamental del sistema con retardo
La matriz K(s) =(
sI −∑mj=0 Aje
−hjs)−1
esta bien definida para s complejos talque Re(s) ≥ max(α, L).Se puede interpretar K(s) como la transformada de Laplace del sistema lineal conretardo
K(t) =m
∑j=0
AjK(t− hj),
K(0) = I, K(θ) = 0 para θ < 0,
Claramente la matriz K(t) satisface (1)I La matriz K(t) se llama matriz fundamental del sistema (1)I Es la extensión natural del concepto de matriz fundamental para sistemas sinretardoI K(t) también satisface K(t) = ∑m
j=0 K(t− hj)Aj, con K(0) = I y K(θ) = 0para θ < 0
S. Mondié (CLCA 2014) 14 de Octubre de 2014 26 / 103

Formula de Cauchy del sistema con retardo
Empleando la definición de K(s), la transformada de Laplace del sistema es
x(s) = K(s)ϕ(0) + K(s)m
∑j=0
Aj
∫ 0
−hj
e−s(hj+θ)ϕ(θ)dθ.
y la transformada de Laplace inversa es
x(t, ϕ) = K(t)ϕ(0) +m
∑j=0
∫ 0
−hj
K(t− hj − θ)Aj ϕ(θ)dθ
I Esta expresión es la formula de Cauchy para el sistema (1)I Dada la condición inicial ϕ, el conocimiento de K(t) es suficiente paradeterminar la solución en todo tiempo t
S. Mondié (CLCA 2014) 14 de Octubre de 2014 27 / 103

Ecuación característica de sistemas con retardos
Considere el sistema
x(t) =m
∑i=0
Aix(t− hi)
con Ai ∈ Rn×n y hi positivos.Su ecuación característica es el cuasipolinomio
∆(s) = det
(sI −
m
∑i=0
Aie−shi
)= p(s, esh1 , ..., eshm)
TeoremaEl sistema (1) es estable si y solo si todas las raíces de su cuasipolinomiocaracterístico tienen parte real estrictamente negativa.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 28 / 103

Ejemplo (Raíces de cuasipolinomios de tipo retardado )
3 2.5 2 1.5 1 0.5 0 100
50
0
50
100
R ea l
Imag
inar
io
R a ic es de un c uas ipo l inom io de tipo r e ta r dado
I Las raices son simétricas con respecto al eje realI Un cuasipolinomio tiene un número infinito de raícesI Están todas ubicadas a la izquierda de una línea verticalI La estabilidad depende de la ubicación de las raíces que estan más a la derecha
S. Mondié (CLCA 2014) 14 de Octubre de 2014 29 / 103

Principio de continuidad de las raíces
TeoremaLas raíces del cuasipolinomio
∆(s) = det(
sI − A0 − A1esh)
varian de manera CONTINUA con respecto al retardos h.
CONSECUENCIA: Si un sistema es estable para unos valores nominales delretardo, solo puede volverse inestable si para algunos pares (h, ω) (llamadosretardos y frecuencias críticas) tiene raíces sobre el eje imaginario:
∆(jω) = det(
jωI − A0 − A1ejωh)= 0
El desarrollo de métodos analíticos y numéricos para determinar estos valorescríticos (h, ω) es un campo activo de investigación.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 30 / 103

Clasificación de cuasipolinomios
La ecuación funcional escalar con un retardo más general tiene forma
ddta0x(t) + a1x(t− h)+ b0x(t) + b1x(t− h) = 0,
a0, a1, b0, b1 ∈ R
Su ecuación característica es
p(s) = a0s+ a1se−sh + b0 + b1e−sh
Se clasifica las ecuaciones differenciales funcionales y cuasipolinomios en tresclases:tipo retardado, neutral y avanzados.La clasificación es en base aI naturaleza de la dependencia de la derivadaI localización de las raíces de gran magnitud en el plano complejo
Esta clasificación se extiende a cuasipolinomios de mayor grado y sistemasmultivariables
S. Mondié (CLCA 2014) 14 de Octubre de 2014 31 / 103

Tipo retardado
a0 x(t) + b0x(t) + b1x(t− h) = 0,
p(s) = a0s+ b0 + b1e−sh
La derivada x(t) depende de valores presentes y pasados del estadoEs el tipo más común, y más fácil de analizar
S. Mondié (CLCA 2014) 14 de Octubre de 2014 32 / 103

Tipo Avanzado
a1 x(t− h) + b0x(t) + b1x(t− h) = 0.Cambio de variable t→ t− h,
a1 x(t) + b0x(t+ h) + b1x(t) = 0.
p(s) = a1s+ b0esh + b1
x(t) depende de x(t+ h)esta categoría no existe en la naturaleza, son inestables!
0
0
System Poles
Re(s)
Im(s)
S. Mondié (CLCA 2014) 14 de Octubre de 2014 33 / 103

Tipo neutral
ddta0x(t) + a1x(t− h)+ b0x(t) + b1x(t− h) = 0,
p(s) = (a0 + a1e−sh)s+ b0 + b1e−sh
x(t) depende de x(t− h)tienen raíces de gran modulo cuya parte real depende de las raíces de laecuación en diferencias a0x(t) + a1x(t− h) = 0 :
p(s) = 0 =⇒
(a0 + a1e−sh) +b0 + b1e−sh
s= 0
s = α+ jω para ω → ∞
implica a0 + a1e−sh = 0
0
0
System Poles
Re(s)
Im(s)
S. Mondié (CLCA 2014) 14 de Octubre de 2014 34 / 103

Método de D-particiones
Metodología
Ejemplo académico
Estudio de caso:Control proporcional retardado de sistemas de segundo orden
S. Mondié (CLCA 2014) 14 de Octubre de 2014 35 / 103

Método de D-particiones: metodología
El método de D partición se basa en el principio de continuidad de las raíces c.r.a.parámetros y retardo
Neimark J. I., D-Decomposition of the space of quasi-polynomials,Amer.Math. Soc. Transl., 2:102, 1973.
Se obtiene una descomposición del espacio de parámetros en regionesseparadas por hipersuperficies correspondientes a raíces en el eje imaginario(s = 0 o s = jω)Para todos los parámetros de una región dada, la ecuación característicatiene un mismo número de raíces con parte real positiva.
Se encuentra este número en dos etapas:1−Se determina la estabilidad de puntos particulares (porque se reducen apolinomios en estos puntos, o por otros métodos (gráficos, temporales)2- Se determina el sentido del movimiento de las raíces en las hipersuperficies, elcual es invariante (Teorema de la función implícita)
S. Mondié (CLCA 2014) 14 de Octubre de 2014 36 / 103

EjemploEcuación con retardo x(t) = ax(t) + bx(t− h), a, b ∈ R:
Cuasipolinomio característico: p(s) = s− a− be−hs = 0
1- Determinación de las D-particiones del espacio de parámetros:I Sustituyendo s = 0 :
a+ b = 0
I Sustituyendo s = jω implicajω− a− b(cos ωh− j sin ωh) = 0 (e−jωh = cos ωh− j sin ωh)Separando la parte real e imaginaria, se obtienen dos ecuaciones
−a− b cos ωh = 0ω+ b sin ωh = 0
En este caso se obtiene una expresión analítica de cruces s = jω
a+ b cos√
b2 − a2h = 0
S. Mondié (CLCA 2014) 14 de Octubre de 2014 37 / 103

EjemploD-partición (a, b) del sistema x(t) = ax(t) + bx(t− 1)
a
b
S. Mondié (CLCA 2014) 14 de Octubre de 2014 38 / 103

Ejemplo2- Sentido del movimiento de las raícesTeorema de la función implícita: en una raíz simple, ∂p(a,s)
∂s 6= 0:
p(s, a) = s− a− be−hs = 0
∂p(a, s)∂a
+∂p(a, s)
∂s∂s∂a
= 0 =⇒ ∂s∂a= −
∂p(a,s)∂a
∂p(a,s)∂s
En nuestro ejemplo, para las frontera donde s = 0 :
∂s∂a= − −1
1+ bhe−hs
∣∣∣∣s=0
=1
1+ bh
I Si b > −1/h, ∂s∂a > 0 de manera que si a aumenta (∂a > 0), una raíz real cruza
el eje imaginario en el sentido positivo, es decir del semiplano izquierdo al derecho.Hay una raíz inestable másI Si b < −1/h, ∂s
∂a < 0, de manera que si a aumenta una raíz pasa del semiplanoderecho al izquierdo. Hay otra raíz inestable más!
S. Mondié (CLCA 2014) 14 de Octubre de 2014 39 / 103

EjemploZona de es-tabilidad y configuración de raíces dominantes del sistema x(t) = ax(t)+ bx(t− 1)
a
b
zona de estabilidad
S. Mondié (CLCA 2014) 14 de Octubre de 2014 40 / 103

Observaciones
La ecuación escalar con retardo aparece en la literatura en el marco delmodelado de los ciclos económicos
Kalecki, M., A macrodynamic theory of business cycles, Econometrica, 3:3,327-344, 1935.
Frisch R. and H. Holme, The characteristic solutions of a mixed differenceand differential equation occuring in economics dynamics, Econometrica, 3:2,225-239, 1935.
El método de D-particiones permite analizar la estabilidad de cuasipolinomiosde orden reducido, en el espacio de parámetros (dos o tres), pero con unconocimiento profundo de la ubicación de las raíces
El estudio del plano de parámetros de cuasipolinomios es tema deinvestigación vigente:
Sipahi, R., Niculescu, S.-I., Abdallah, C.T., Michiels, W., Gu, K., Stabilityand Stabilization of Systems with Time Delay, Limitations and opportunities,IEEE Control Systems Magazine, 31:1, 38-65, 2011.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 41 / 103

Estudio de casos:Control proporcional retardado de sistemas de segundo
orden
R. Villafuerte, S. Mondié and R. Garrido, Tuning of Proportional Retardedcontrollers: Theory and Experiments, IEEE Transactions on Control SystemsTechnology, 21(3), 983-990, 2013.
Ver también Control PIR (Proporcional Retardado Integral)
Adrian Ramírez, Sabine Mondié, Rubén Garrido-Moctezuma,Proportional Integral Retarded Control of Second Order Linear Systems, 52thIEEE Conference on Decision and Control, Florence, Italy, 2013.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 42 / 103

Ejemplo (Control Proporcional retardado de un segundo orden)
Sistema de segundo orden: θ(t) + 2δνθ(t) + ν2θ(t) = bu(t)
Ley de control Proporcional Retardada (PR): u(t) = −kpθ(t) + krθ(t− h)
kp y kr : ganancias proporcional y retardada,h: parámetro de diseño.
Cuasipolinomio en lazo cerrado:
p(s, kp, kr, h) = s2 + 2δνs+ ν2 + bkp − bkre−hs
Problema: estabilizar el sistema con decaimiento exponencial σ
El cambio de variable s −→ (s− σ) reduce el problema al análisis de estabilidad de
pσ(s, kp, kr, h) = s2 + σ2 + 2(δν− σ)s+ (ν2 − 2δνσ+ bkp)− bkrehσe−hs.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 43 / 103

Ejemplo (cont...)El análisis frecuencial permite:I una parametrización de las zonas de σ-estabilidad:
I Decaimiento máximo σ∗ = δν+√
ν2(1− δ2) + bkp
I Sintonización del Control PR para sistema de segundo orden.
h∗ = − 2(δν− σ∗)ν2 + (σ∗)2 − 2δνσ∗ + bkp
, k∗r = −2(δν− σ∗)
bh∗eσ∗h∗ .
S. Mondié (CLCA 2014) 14 de Octubre de 2014 44 / 103

Ejemplo (Control PR de un servomotor de CD)
Buena atenuación del ruido comparado con otros esquemas de control
S. Mondié (CLCA 2014) 14 de Octubre de 2014 45 / 103

Métodos Gráficos
Principio del argumento
Teorema de Nyquist
Teorema de inclusión finita y familias politópicas
S. Mondié (CLCA 2014) 14 de Octubre de 2014 46 / 103

Principio del argumento
TeoremaSea f (s) una función analítica dentro y sobre una curva cerrada simple C, exceptopara un número finito de polos dentro de C, entonces se satisface la siguienteigualdad
12π
∆C arg f (s) = Nz − Np.
I ∆C arg f (s): cambio en el argumento de f (s) a lo largo de CI Nz, Np : número de ceros y polos de f (s) dentro de la curva C, contandomultiplicidades.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 47 / 103

Los cuasipolinomios de tiporetardado tienen un númeroinfinito de raíces en elsemiplano izquierdo. No esposible emplear el contornode Nyquist habitual en elsemiplano izquierdo.
En el semiplano derecho,existe un número finito deraíces, por lo que podemosusar un contorno de Nyquisten el semiplano derecho.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 48 / 103

Teorema de Nyquist para cuasipolinomios
TeoremaEl cuasipolinomio
∆(s) = det
(sI − A0 −
m
∑i=1
Aieshi
)= sn +
n−1
∑l=1
al(esh1, ..., eshm)sl
es estable si y solo si el cambio del argumento neto Φ[0,jR] de ∆(jω) paraω ∈ [0, R] satisface:
nπ
2− π
2< Φ[0,jR] < n
π
2+
π
2,
donde R depende de los parámetros del cuasipolinomio.
El problema de investigar todo el contorno de Nyquist se reduce a investigar unaporción del eje imaginario!
Mondié S., Santos, J., Kharitonov V., Robust stability of quasipolynomialsand the Finite Inclusion Theorem, IEEE Trans. on Autom. Contr., Vol. 50,No. 11, 1826-1831, 2005.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 49 / 103

Ejemplo: cambio del argumento de un cuasipolinomio
Observación: Los cuasipolinomiosno satisfacen la propiedad deincremento de fase
S. Mondié (CLCA 2014) 14 de Octubre de 2014 50 / 103

Teorema finito de Nyquist
Teorema
El cuasipolinomio f (s) es estable si y solo si existe un entero r ≥ 1, ángulosθi ∈ R para 0 ≤ i ≤ r y frecuencias 0 = ω0 < ω1 < · · · < ωr ≤ R, (Rmencionado anteriormente), tales que
θ0 = 0,
nπ
2− π
2< θr < n
π
2+
π
2,
∀ 0 ≤ i < r− 1 : |θi+1 − θi| ≤ π
∀ 0 ≤ i ≤ r : f (jωi) 6= 0∀ 0 ≤ i ≤ r : arg f (jωi) ≡ θi (mod 2π).
El problema de investigar todo el contorno de Nyquist se reduce a encontrar unnúmero finito de frecuencias y ángulos!
S. Mondié (CLCA 2014) 14 de Octubre de 2014 51 / 103

Robustez de familias politópicas
A partir del Teorema de Nyquist, se puede desarrollar el Teorema de inclusiónfinita, el cual permite analizar familias de cuasipolinomios, politopicas o intervalo
T
∑i=1
µi fi(s)| µi ≥ 0,
T
∑i=1
µi = 1
fi(s) = s3 + ais+ bie−s
i ai bi1 10π2 5
8 π3
2 354 π2 5
8 π3
3 354 π2 5
2 π3
4 10π2 154 π3 Figura: Conjunto de valores y
sectores
S. Mondié (CLCA 2014) 14 de Octubre de 2014 52 / 103

III: Análisis en el dominio del tiempo
Justificación del nuevo marco teórico: enfoques de Razumikhin y Krasovskii
Resultados fundamentales de estabilidad del enfoque de Krasovskii
Enfoque de funcionales de tipo propuesto y LMI´s
Funcionales de tipo completo, con derivada prescrita
S. Mondié (CLCA 2014) 14 de Octubre de 2014 53 / 103

Necesidad de un nuevo marco teórico
Ejemplo
Sea el sistema.x(t) = ax (t) + bx (t− h) , a, b ∈ R
La derivada de la función de Lyapunov v(x(t)) = x(t)2, positiva definida, a lolargo de las trayectorias es
dv(x(t))dt
= 2x (t) [ax (t) + bx (t− h)]
= 2ax2 (t) + 2bx (t) x (t− h) .
I b = 0: el sistema no tiene retardo, si a < 0 la derivada es negativa definida porlo que el sistema es asíntoticamente estableI b 6= 0 : no se sabe el signo del término x(t)x(t− h)por lo que es imposibleconcluir sobre el signo de la derivada.
El enfoque de Lyapunov conocido no es útil en este sencillo ejemplo.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 54 / 103

Extensiones del enfoque de Lyapunov a los sistemas conretardo
Dos enfoques:
Enfoque de Krasovskii:Parte de la idea de que puesto que el estado de un sistema con retardo esuna función definida en [t− h, t], se deben utilizar, no funciones, sinofuncionales que capturan todo el estado del sistema.
Enfoque de Razumikhin:Mantiene la simplicidad asociada al uso de funciones de Lyapunov perointroduce condiciones que toman en cuenta la dependencia que existe entrex(t) y x(t− h) que pertenecen a una la misma trayectoria.
Nota: mayor popularidad del enfoque de Krasovskii
S. Mondié (CLCA 2014) 14 de Octubre de 2014 55 / 103

Definiciones de estabilidad
Sea el sistema.x(t) = F (t, xt) (2)
donde la funcional F (t, xt) esta definida y es continua, Lipschitz c.r.a. xt, acotaday con solución trivial (F(t, 0) ≡ 0 ∀t ≥ 0).
DefiniciónLa solución trivial del sistema (2) es estable si para todo ε > 0 y t0 ≥ 0 existeδ = δ (ε, t0) > 0 tal que para toda condición inicial ϕ tal que ‖ϕ‖h < δ (ε, t0)entonces ‖x (t, ϕ, t0)‖ < ε para todo t ≥ t0.(uniforme si δ es independiente de t0)
DefiniciónLa solución trivial del sistema (2) es estable asintóticamente si es estable yademás, x (t, ϕ, t0)→ 0 cuando t→ ∞.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 56 / 103

DefiniciónLa solución trivial del sistema (2) es exponencialmente estable si para todo t0 ≥ 0existen ∆ > 0, σ > 0 y γ > 0 tales que si ‖ϕ‖h < ∆ (ε, t0) la solución satisface
‖x (t, ϕ, t0)‖ ≤ γ ‖ϕ‖h e−σ(t−t0), t ≥ t0.
Las definiciones se asemejan a las existentes para sistemas libres de retardos.Difieren por las condiciones iniciales
En el caso de sistemas con retardos lineales la estabilidad asíntotica yexponencial son equivalentes (porque las soluciones son de orden exponencial)
Si.x(t) = F (t, xt) no tiene solución trivial se hace un cambio de variables
S. Mondié (CLCA 2014) 14 de Octubre de 2014 57 / 103

Funcionales positivas definidas
DefiniciónLa funcional v (xt) se dice definida positiva siI esta definida para toda ‖xt‖h < H, para algún H > 0I es continua y acotada,I v (0h) = 0 y v (xt) > 0 si xt 6= 0h.
DefiniciónLa funcional v (t, xt) es definida positiva siI existe H > 0 tal que v (t, xt) esta definida para toda ‖xt‖h < H y para t ≥ 0,I es continua para todo t ≥ 0 fijo con respecto a xt en el punto xt = 0,I v(t, 0h) = 0,I existe una funcional v0 (xt) (llamada funcional de soporte) positiva definida talque :
v0 (xt) ≤ v (t, xt) , ∀t ≥ 0.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 58 / 103

Condiciones necesarias y suficientes generales
Teorema(Krasovskii) La solución trivial del sistema (2) es asintóticamente estable si y solosi existe una funcional v (t, xt) definida positiva y una función v1(x(t)) definidapositiva tal que:1. v1(x(t)) ≤ v (t, xt) , ∀ t ≥ 0 y ‖xt‖ ≤ H,2. v (t, xt) decrece monotónicamente hasta cero a lo largo de las trayectorias delsistema (2) cuando t→ ∞.
Condición suficiente: Se muestra que si encontramos una funcional quecumple estas condiciones, el sistema es asintóticamente estable. Sin embargo,encontrarla no es un problema trivial.
Condiciones necesarias: Se demuestra que si el sistema es asintóticamenteestable, existe dicha funcional, sin embargo, su forma no se conoce. Laprueba no es constructiva.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 59 / 103

Observaciones
Existen resultados que permiten, imponiendo restricciones sobre la clase desistemas y clase de funcionales encontrar condiciones suficientes deestabilidad y estabilidad asintótica, exponencial etc...
Desventaja: Si no se encuentra una funcional, no se puede decir nada sobre laestabilidad del sistema estudiado
Ventaja: son más útiles desde el punto de vista práctico ya que puedenayudar a encontrar funcionales que permitan concluir.
Hale, J. K. Introduction to functional differential equations, Springer Verlag,New York, 1993.
Kharitonov, V. Time-delay systems: Lyapunov functionals and matrices,Birkhäuser, 2013.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 60 / 103

Condiciones suficientes de estabilidad asintótica
TeoremaSea el sistema (2). Si existe una funcional continuamente diferenciable v(xt) talque:1. Existen constantes positivas α1, α2 tales que
α1 ‖x(t)‖2 ≤ v(xt) ≤ α2 ‖xt‖2h
2. La funcional es diferenciable a lo largo de las soluciones y existe una constantepositiva γ tal que
ddt
v(xt(ϕ)) ≤ −γ ‖x(t)‖2 .
entonces el sistema es asintóticamente estable.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 61 / 103

Condiciones independientes del retardo, sistemas lineales
Sea el sistema con retardo
x(t) = A0x(t) + A1x(t− h) (1)
Se propone la funcional de Lyapunov-Krasovskii
V(xt) = xT(t)Px(t) +∫ t
t−hxT(ξ)Sx(ξ)dξ donde P > 0 y S > 0
1. Condición de cotas:(Raleigh: M > 0, λmın(M) ‖z‖2 ≤ zT Pz ≤ λmax(M) ‖z‖2)
λmın(P) ‖x(t)‖2 ≤ V(xt)
y
V(xt) ≤ λmax(P) ‖x(t)‖2 +∫ t
t−hλmax(S) ‖x(ξ)‖2 dξ
≤ λmax(P) ‖xt‖2h + λmax(S)
∫ t
t−h‖xt‖2
h dξ ≤ (λmax(P) + λmax(S)h) ‖xt‖2h
S. Mondié (CLCA 2014) 14 de Octubre de 2014 62 / 103

2. Condición de derivada:Derivada de
V(xt) = xT(t)Px(t) +∫ t
t−hxT(ξ)Sx(ξ)dξ
a lo largo de las trayectorias del sistema:
V(xt) = 2xT(t)P(A0x(t) + A1x(t− h)) + xT(t)Sx(t)− xT(t− h)Sx(t− h),
reacomodando,
V(xt) =(
xT(t), xT(t− h))( PA0 + AT
0 P+ S PA1AT
1 P −S
)︸ ︷︷ ︸
−M
(x(t)
x(t− h)
).
Si M > 0 entonces por Raleigh
V(xt) ≤ −λmın(M) ‖(x(t), x(t− h))‖2 ≤ −λmın(M) ‖(x(t)‖2 .
Las condiciones suficientes (cotas y derivada) del Teorema de LK secumplen: el sistema es asíntoticamente estable
S. Mondié (CLCA 2014) 14 de Octubre de 2014 63 / 103

Comentarios
El problema se reduce a verificar si las desigualdades matriciales lineales(LMI´s)
P > 0; S > 0;(
PA0 + AT0 P+ S PA1
AT1 P −S
)< 0
tienen solución para matrices P y SEstas condiciones son independientes del retardo hEstas condiciones se reducen en el caso A1 = 0, a la condición para sistemaslibres de retardo:
Existe P > 0 tal que AT0 P+ PA < 0
Las LMI´s se resuelven gracias a métodos de punto interior. Existen paquetesde software altamente eficientes
I LMI toolbox de MatlabI YALMIP, SEDUMI,....
S. Mondié (CLCA 2014) 14 de Octubre de 2014 64 / 103

Enfoque descriptor
TeoremaSea el sistema lineal
x(t) = A0x(t) + A1x(t− h)
entonces si existen matrices n× n P > 0, R ≥ 0, S ≥ 0 y P2, P3 tales que
Φ =
AT0 P2 + PT
2 A0 + S− R P− PT2 + AT
0 P3 PT2 A1 + R
∗ −P3 − PT3 + h2R PT
3 A1∗ ∗ −(S+ R)
< 0
entonces la solución del sistema es asintóticamente estable.
Este tipo de resultados se extiende a sistemas: con control, matrices conincertidumbre, retardos variantes en el tiempo.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 65 / 103

Prueba:Considere la funcional de Lyapunov Krasovskii
V(xt, xt) = xT(t)Px(t) +∫ t
t−hxT(s)Sx(s)ds+ h
∫ 0
−h
∫ t
t+θxT(s)Rx(s)dsdθ
donde P, R, S son positivas definidas.
dV(xt, xt)
dt= 2xT(t)Px(t) + xT(t)Sx(t)− xT(t− h)Sx(t− h)
+h2 xT(t)Rx(t)− h∫ t
t−hxT(s)Rx(s)ds.
Por la desigualdad de Jensen,∫ t
t−hxT(s)Rx(s)ds ≥ 1
h
∫ t
t−hxT(s)dsR
∫ t
t−hx(s)ds
≥ 1h(x(t)− x(t− h))T R (x(t)− x(t− h)) .
S. Mondié (CLCA 2014) 14 de Octubre de 2014 66 / 103

Sustituyendo,
dV(xt, xt)
dt≤ 2xT(t)Px(t) + h2 xT(t)Rx(t)
+xT(t)Sx(t)− xT(t− h)Sx(t− h)
− (x(t)− x(t− h))T R (x(t)− x(t− h))
El enfoque descriptor consiste en sumar la expresión nula
0 = 2[xT(t)P2 + xT(t)P3][−x(t) + A0x(t) + A1x(t− h)]︸ ︷︷ ︸=0!
con P2 y P3 ∈ Rn×n al lado derecho de la derivada.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 67 / 103

Entonces,
dV(xt, xt)
dt≤ 2xT(t)Px(t) + h2 xT(t)Rx(t)
+xT(t)Sx(t)− xT(t− h)Sx(t− h)
− (x(t)− x(t− h))T R (x(t)− x(t− h))
+2[xT(t)P2 + xT(t)P3][−x(t) + A0x(t) + A1x(t− h)]
Definiendo η(t) = colx(t), x(t), x(t− h), y reescribiendo en forma cuadrática,
dV(xt, xt)
dt≤ ηT(t)Φη(t)
Si Φ < 0, se satisfacen las condiciones del Teorema de Lyapunov-Krasovskii.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 68 / 103

Campo de estudio
Los métodos del enfoque de Lyapunov Krasovskii tiene un amplio campo deestudio:
Por los que se pueden abordarI análisisI control
Por las numerosas clases de sistemas que se pueden estudiar
Por las nuevas técnicas propuestas que buscan mejorar resultados existentesI nuevas funcionalesI nuevas desigualdades en las majorizaciones
Por las aplicaciones donde los retardos sonI un reto tecnológicoI un instrumento de control
Amplia comunidad de sistemas con retardos y numerosos resultados
S. Mondié (CLCA 2014) 14 de Octubre de 2014 69 / 103

Problemas estudiados: diseño de control, estabilización
I Encontrar las matrices K1, K2 tales que el sistema en lazo cerrado
x(t) = (A0 + BK1)x(t) + (A1 + BK2)x(t− h)
sea exponencialmente estable.I Control H∞, control con costo garantizadoI Estabilidad con máximo decaimiento exponencial, prácticaI Saturaciones en el controlI Diseño de observadoresI Estimado del dominio de atracciónI ....
S. Mondié (CLCA 2014) 14 de Octubre de 2014 70 / 103

Problemas estudiados: incertidumbre parámetrica
Incertidumbre paramétricaI aditiva
.x(t) = (A0 + ∆0)x(t) + (A1 + ∆1)x(t− h)
∆0 y ∆1representan perturbaciones paramétricas, dinámicas no modeladas...Pueden ser
Acotada : ‖∆0‖ ≤ δ0; ‖∆1‖ ≤ δ1
Estructurada: ∆0 = EFG0; ∆1 = EFG1
‖F‖ ≤ 1; E, G0, G1 matrices conocidas
I politópica:
·x(t) = (A0 +
l
∑j=1
µj∆(j)0 ) x(t) + (A1 +
l
∑j=1
µj∆(j)1 ) x(t− h)
para µj ≥ 0yl
∑j=1
µj = 1.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 71 / 103

Problemas estudiados: incertidumbre en el retardo
Varios tipos de incertidumbre en el retardo:I Retardo intervalo h ∈ [0, h] (Primer intervalo);
I Retardos de tipo intervalo h ∈ [h, h],
I retardos variante en el tiempo h(t), con derivada acotada
S. Mondié (CLCA 2014) 14 de Octubre de 2014 72 / 103

Problemas estudiados: nolinealidades y ruido
.x(t) = A0x(t) + A1x(t− h) + f (t, x(t), x(t− h)) + η(t)
donde la función no lineal f (t, x(t), x(t− h)) satisfacen ciertas propiedades.I Condición estabilidad en primera aproximación
∀γ > 0, ∃ε > 0 tal que ‖ f (y(t), y(t− 1))‖ ≤ γ ‖(y(t), y(t− h))‖I Condición tipo Elipsoidal: para ρ0, ρ1 constantes positivas,
f T(x(t), x(t− h))L−1 f (y(t), y(t− 1))
≤ ρ0 + ρ1(y(t), y(t− h))T M(y(t), y(t− h)),
I Ruido acotado‖η(t)‖ ≤ η
S. Mondié (CLCA 2014) 14 de Octubre de 2014 73 / 103

Sistemas a los que se extiende la teoría
Sistemas con retardos múltiples, de tipo distribuido y neutrales
Sistemas muestreados
Sistemas conmutados
Sistemas quantizados
Sistemas con parámetros distribuidos ( EDP de transporte, de calor, de onda)
S. Mondié (CLCA 2014) 14 de Octubre de 2014 74 / 103

Mejora de resultados gracias a resultados técnicos
Propuesta de funcionales mas eficientesI Aproximaciones lineales a pedazos, por polinomios, polinomios deLegendre, suma de cuadrados (SOS)...I Método descriptor
Empleo de desigualdades menos conservativas en las mayorizacionesI Jensen, Wirtinger, Bessel,...
S. Mondié (CLCA 2014) 14 de Octubre de 2014 75 / 103

Selección de libros
Kolmanovskii, V. B. y V. R. Nosov, Stability of Functional DifferentialEquations, Mathematics in Science and Eng., 180, Academic Press, NewYork, 1996.
Niculescu S., Delays effects on stability, A robust control approach, Springer,Heidelberg, 2001.
Gu K., Kharitonov V. and J. Chen, Stability of Time Delay Systems,Birkhäuser, 2003.
Fridman, E. Introduction to time delay systems: analisis and Control,Birkhäuser, 2014.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 76 / 103

Selección de artículos
Gu, K. Discretized LMI set in the stability problem of linear uncertaintime-delay systems. Int. J. Control, 68:923-934, 1997.
Fridman, E., and U. Shaked, A descriptor approach to H infinity control oflinear time-delay systems. Institute of Electrical and Electronics Engineers.Trans. on Autom. contr., 47:2, 253-270, 2002.
Seuret A. and Gouaisbaut, Wirtinger based integral inequality: Applicationto time delay systems, Automatica, 2013.
Mondié S. and Kharitonov, V. L., Exponential estimates for time delaysystems, IEEE Trans. on Autom. Contr., Vol. 50, 2, 268 —273, 2005.
Peet M. M. , A. Papachristodoulou and S. Lall, Positive Forms and Stabilityof Linear Time-Delay Systems, SIAM Journal on Control and Optimization,47:6, 2009.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 77 / 103

Estudio de casos:Control de vibraciones torcionales y axiales en un proceso
de perforación
B. Saldivar, S. Mondié, Drilling Vibration Reduction Via Attractive EllipsoidMethod, Journal of the Franklin Institute, 350 (3):485-502, 2013.
Ver también:
Estimado de cotas exponenciales para sistemas conretardos
S. Mondié and V. Kharitonov, Exponential estimates for time delay systems,a LMI approach, IEEE Trans. on Autom. Contr., Vol. 50, 2, 268-273, 2005.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 78 / 103

Caso de estudio
S. Mondié (CLCA 2014) 14 de Octubre de 2014 79 / 103

Funcionales de tipo completo
S. Mondié (CLCA 2014) 14 de Octubre de 2014 80 / 103

Recordatorio: Caso libre de retardos
x = Ax, x(0) = x0. (3)
La formula de Cauchy (transformación de Laplace sx(s)− x0 = Ax(s)) esx(t, x0) = eAtx0 y la matriz fundamental es eAt.
TeoremaEl sistema (3) es asintóticamente estable si y solo si para Q > 0 existe P > 0 talque
AT P+ PA = −Q. (ecuación de Lyapunov)
Suficiencia:se propone v(x(t)) = x(t)T Px(t) y se deriva a lo largo de lastrayectorias del sistema:
dvdt
∣∣∣∣(3)
= xT(t)Px(t) + xT(t)Px(t)
= xT(t)[AT P+ PA]x(t) = −xT(t)Qx(t)
Si P y Q son positivas, se cumplen las condiciones del teorema de Lyapunov.
Pero, porque se propone una forma cuadrática?S. Mondié (CLCA 2014) 14 de Octubre de 2014 81 / 103

Forma general de la función de Lyapunov para s.l.r.
Suponga que la derivada es de forma cuadrática y negativa
dv(x(t))dt
= −x(t)TQx(t)
Integrando de cero a T a lo largo de las trayectorias x(t, x0),
v(x(t))|T0 = v(x(T, x0))− v(x(0, x0)) = −∫ T
0x(t, x0)
TQx(t, x0)dt
I Si (2) es asíntoticamente estable, x(T, x0) −→ 0 cuando T −→ ∞I v(0) = 0,I La solución es x(t, x0) = eAtx0
v(x0) = x0T(∫ ∞
0eAT tQeAtdt
)x0.
Entonces la función de Lyapunov es de forma
v(x) = xT Px con P =∫ ∞
0eAT tQeAtdt
Sustituyendo, es fácil mostrar que P satisface la ecuación de Lyapunov.S. Mondié (CLCA 2014) 14 de Octubre de 2014 82 / 103

Recapitulación del caso libre de retardos
Se determina la forma de la función de Lyapunov como sigue
Integrando y sustituyendo la formula de Cauchy, se determina que para unaderivada negativa
dv(x(t))dt
= −xTQx, Q > 0
la forma general de la función de Lyapunov es v(x) = xT Px.Para calcular P, no se requiere evaluar la integral indefinida, solo resolver laecuación de Lyapunov
AT P+ PA = −Q
Finalmente, para determinar si el sistema es estable, basta con verificar siP > 0 (criterio de Lyapunov)
S. Mondié (CLCA 2014) 14 de Octubre de 2014 83 / 103

Extensión al caso de sistemas con retardos
Tenemos todos lo elementos para realizar el proceso para el sistema.x(t) = A0x(t) + A1x(t− h), x(θ) = ϕ(θ), θ ∈ [−h, 0]
Formula de Cauchy:
x(t, ϕ) = K(t)ϕ(0) +m
∑j=0
∫ 0
−hj
K(t− hj − θ)Aj ϕ(θ)dθ
Matriz fundamental:
K(t) =m
∑j=0
AjK(t− hj), K(0) = I, K(θ) = 0 para θ < 0,
Se integra a lo largo de las trayectorias, se sustituye la formula de Cauchy.Definiendo la matriz de Lyapunov para sistemas con retardos como
U(τ) =∫ ∞
0K(θ)TWK(θ + τ)dθ; τ ∈ [0, h],
y realizando cálculos laboriosos conducen a la forma general buscada.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 84 / 103

Funcionales de Lyapunov Krasovskii de tipo completo
TeoremaSea el sistema lineal con retardo estable
.x(t) = A0x(t) + A1x(t− h)
Dada una matriz matriz positiva definida W, la funcional
v0(xt) = xT(t)U(0)x(t) + 2xT(t)∫ t
t−h[U(h+ θ − t)] T A1x(θ)dθ
+∫ t
t−h
[∫ t
t−hxT(θ1)AT
1 U(θ1 − θ2)A1xT(θ2)dθ1
]dθ2,
es tal que su derivada a lo largo de las trayectorias del sistema es
ddt
v(xt) = −xT(t)Wx(t).
Teorema de Lyapunov de tipo converso
S. Mondié (CLCA 2014) 14 de Octubre de 2014 85 / 103

Funcionales de Lyapunov Krasovskii de tipo completo
La derivada de esta funcional no abarca todo el estado del sistema
TeoremaSea el sistema lineal con retardo estable
.x(t) = A0x(t) + A1x(t− h). Para
W0, W1 y W2 positivas definidas tales que
W0 +W1 + hW2 = W,
la funcional
v(xt) = v0(xt) +∫ t
t−hxT(θ)[W1 + (h+ θ − t)W2]x(θ)dθ.
es tal que su derivada a lo largo de las trayectorias del sistema es
ddt
v(xt) = −xT(t)W0x(t)− xT(t− h)W1x(t− h)−∫ t
t−hxT(θ)W2x(θ)dθ.
v(xt) y ddt v(xt) dependen de todo el estado xt = x(t+ θ), θ ∈ [−h, 0]
Por esto se les llama de "Tipo Completo"S. Mondié (CLCA 2014) 14 de Octubre de 2014 86 / 103

Cuota cuadrática inferior de funcionales de tipo completo
Existencia de una cota cuadrática inferior para sistemas estables
LemaSi el sistema es estable, entonces existe α > 0, tal que
v(xt) ≥ α ‖x(t)‖2 .
Prueba: Se muestra que existe α tal que
vα(xt) = v(xt)− α ‖x(t)‖2 ≥ 0
Note que
ddt
vα(xt) = −xT(t)W0x(t)− xT(t− h)W1x(t− h)−∫ t
t−hxT(θ)W2x(θ)dθ
−2αxT(t)[A0x(t) + A1(t− h)]
S. Mondié (CLCA 2014) 14 de Octubre de 2014 87 / 103

Reacomodando,
ddt
vα(xt) = −[
x(t)x(t− h)
]T ([ W0 00 W1
]+ α
[(A0 + AT
0 ) A1AT
1 0
]) [x(t)
x(t− h)
]−∫ 0
−hxT(t+ θ)W2x(t+ θ)dθ
Puesto que W0 y W1 son positivas definidas, si α0 es el valor crítico (real) para elcual el determinante se hace cero por primera vez
ddt
vα(xt) ≤ 0, para α ∈ [0, α0)
Integrando ambos lados, por la estabilidad exponencial del sistema, paraα ∈ [0, α0) se tiene que
lımt→∞
vα(xt)− vα(ϕ) ≤ 0
Por estabilidad, lımt→∞
vα(xt) = 0, entonces existe α > 0 tal que
vα(xt) = v(xt)− α ‖x(t)‖2 ≥ 0
y el resultado sigue.También se puede mostrar que
v(xt) ≥ α
(‖x(t)‖2 +
∫ 0
−hx(t+ θ)dθ
)S. Mondié (CLCA 2014) 14 de Octubre de 2014 88 / 103

Matriz y ecuación de Lyapunov para sistemas con retardos
U(τ) =∫ ∞
0K(θ)TWK(θ + τ)dθ; τ ∈ [0, h],
Satisface 3 propiedades que son el análogo de la ecuación de Lyapunov:
Propiedad de simetría
U(−τ) = UT(τ), ∀τ,
Propiedad Algebraica
AT0 U(0) +U(0)A0 + AT
1 U(h) + [U(h)]T A1 = −W,
Propiedad Dinámica
U′(τ) = U(τ)A0 +U(τ − h)A1, t ≥ 0.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 89 / 103

Construcción de la matriz de Lyapunov para sistemas conretardos
El conocimiento de la matriz U(θ), θ ∈ [0, h] es imprescindible para su uso enproblemas de interés.
La formulaU(τ) =
∫ ∞
0K(θ)TWK(θ + τ)dθ; τ ∈ [0, h],
no puede emplearse para la construcción (implicaría que se conoce la matrizfundamental en todo tiempo)
Se puede construir a partir de las tres propiedades: simétrica, Dinámica yalgebraica.
Es un problema de valores en la frontera en dos puntos
En algunos casos (retardos conmensurables) se tiene una solución analítica(semi)
Sino, se debe recurrir a métodos de aproximación: lineal a pedazos,polinomial...
S. Mondié (CLCA 2014) 14 de Octubre de 2014 90 / 103

Ejemplo (Aproximación polinomial de U)
U(N)(θ) = U0 +U1θ +U2θ2 + ...+UNθN , θ ∈ [0, h]
S. Mondié (CLCA 2014) 14 de Octubre de 2014 91 / 103

Condiciones necesarias (y suficientes) de estabilidad
Idea de la prueba:I Si el sistema es estable, la funcional tiene forma general v(xt) y tiene cuotacuadrática inferiorI Esto se cumple para toda condición inicial
I Por ejemplo, sustituyendo ϕ(θ) =
θ = 0 γ, constante arbitraria
θ ∈ (0, h] 0 en
v0(ϕ)=ϕT(0)U(0)ϕ(0) + 2ϕT(0)∫ 0
−h[U(h+ θ − t)] T A1 ϕ(θ)dθ + ..
se obtienev0(ϕ) = γTU(0)γ > 0 =⇒ U(0) > 0
I Condiciones iniciales ϕ(θ) = ∑ri=1 K(τi + θ)γi y nuevas propiedades conducen
a condiciones necesarias expresadas exclusivamente en términos de la matriz defunciones Lyapunov
S. Mondié (CLCA 2014) 14 de Octubre de 2014 92 / 103

TeoremaSi el sistema (2) es exponencialmente estable, entonces
U(0) > 0Kr(τ1, . . . τr) = U(−τi + τ j)r
i,j=1 ≥ 0,
donde τk ∈ [0, h], k = 1, r.
Por ejemplo,
K2(0, h) =
(U(0) U(τ)
UT(τ) U(0)
), τ ∈ [0, h]
K4(0, τ1, τ2, h) =
U(0) U(τ1) U(τ2) U(h)
UT(τ1) U(0) U(τ2−τ1) U(h− τ1)UT(τ2) UT(τ2−τ1) U(0) U(h− τ2)UT(h) UT(h− τ1) UT(h− τ2) U(0)
τ1 ∈ [0, h], τ2∈ [0, h]
S. Mondié (CLCA 2014) 14 de Octubre de 2014 93 / 103

Ejemplo (Direcciones convexas de sistemas con retardos)
·x(t) = A0x(t) + µA1x(t− h),
A0 =
(−1 1−4 −1
),
A1 =
(0 −10 0
),
h y µ parámetros reales.
1 1 .1 1 .2 1 .30
5
10
15
µ
h
U(0) > 0 y K3(0, h/2, h) ≥ 0
La matriz A1 es una dirección convexa para este sistema con retardo.
Al incrementar el parámetro r de Kr se mejora el estimado de las zonas deestabilidad
S. Mondié (CLCA 2014) 14 de Octubre de 2014 94 / 103

Ejemplo (zonas de σ-estabilidad)Control Proporcional Retardado de un sistema de segundo orden con decaimientoexponencial deseado.El sistema tiene la forma general
·x(t) = A0x(t) + A1x(t− h), con
A0 =
(0 1ξ −2(δν− σ)
); A1 =
(0 0
bkrehσ 0
),
I h y kr parámetros de controlI ξ = −(σ2 + ν2 − 2δνσ+ bkp),
0 0.1 0.2 0.3 0.4
20
0
20
40
60
h
kr
U(0) > 0 y K3(0, h/2, h) ≥ 0
0 0.1 0.2 0.3 0.4
20
0
20
40
60
h
kr
U(0) > 0 y K4(0, h/2, h) ≥ 0
S. Mondié (CLCA 2014) 14 de Octubre de 2014 95 / 103

Comparación de condiciones necesarias con suficientes
Sistema orden 4con
retroalimentaciónde salida:
x(t) = Ax(t) + Bu(t)y(t) = Cx(t).
u(t) = −Ky(t) + Ky(t− h)
Las condiciones necesarias superan unas de las mejores condicionessuficientes LMI’s obtenidas con funcionales de tipo prescrito y polinomios deLegendre (Seuret Guaisbaut, 2014).
S. Mondié (CLCA 2014) 14 de Octubre de 2014 96 / 103

Problemas de interés:
Hasta este momento se han empleado las funcionales de tipo completo en el marcode problemas donde se hace la suposición de que el sistema nominal es estable
Cotas de estabilidad exponencial, Cotas de robustez
Diseño de controladores suboptimos, Control Lyapunov function
Extensión de la técnica de backstepping a los sistemas con retardo en elestado y en la entrada.
Resultados recientes
En analogía al caso de sistemas libres de retardo (criterio P > 0), se puedeahora determinar la estabilidad, no a través de las funcionales, sinodirectamente a través de las propiedades de U(θ), θ ∈ [0, h]
S. Mondié (CLCA 2014) 14 de Octubre de 2014 97 / 103

Selección de resultados
Kharitonov, V. L. and Zhabko, A.P., Lyapunov Krasovskii approach to therobust stability analysis of time delay systems, Automatica, vol. 39, no. 1,15-20, 2003.
Kharitonov, V. L., Time-delay systems: Lyapunov functional and matrices,Birkhauser, 2013
Egorov, A. and S. Mondié, Necesary stability conditions, accepted inAutomatica, 2014
Huesca E., Mondié S. and Santos O., Polynomial approximation of theLyapunov matrix of a class of time delay systems, TDS’09, Sinaia, Romania,2009.
S. Mondié (CLCA 2014) 14 de Octubre de 2014 98 / 103

S. Mondié (CLCA 2014) 14 de Octubre de 2014 100 / 103

Gracias por su Atención
S. Mondié (CLCA 2014) 14 de Octubre de 2014 101 / 103