
SISTEMAS DE CONTROL II - LIMAC - Facultad de … · Sistemas de Control II. ... y las relaciones...
87
Sistemas de Control II. Ingeniería Electrónica http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 1 UNIVERSIDAD NACIONAL DE CÓRDOBA FACULTAD DE CIENCIAS EXACTAS, FÍSICAS Y NATURALES SISTEMAS DE CONTROL II Filminas para apuntes de clases a cargo de Prof. Dr. Ing. Julián A. Pucheta Primer Semestre de 2013
Transcript of SISTEMAS DE CONTROL II - LIMAC - Facultad de … · Sistemas de Control II. ... y las relaciones...

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 1
UNIVERSIDAD NACIONAL DE CÓRDOBA
FACULTAD DE CIENCIAS EXACTAS, FÍSICAS Y NATURALES
SISTEMAS DE CONTROL II
Filminas para apuntes de clases a cargo de
Prof. Dr. Ing. Julián A. Pucheta
Primer Semestre de 2013

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 2
1. Introducción 1.1. Motivación
Es frecuente que en problemas de ingeniería se requiera manipular una variable para establecerle sus rangos según sea necesario. Se requiere lograr que la variable evolucione a lo largo del tiempo dentro de un rango determinado, para lo cual se debe especificar un sistema de control. Existen numerosos casos, por ejemplo la velocidad de un motor, la acidez de un líquido, la temperatura de un horno, la humedad de un ambiente, etc. Dentro de los procesos de dinámica lenta, puede clasificarse a la humedad de suelo o contenido de agua en suelo. Así, si se desea controlar el contenido de agua en el suelo en un cultivo agrícola, se puede instalar un sistema como se muestra en la Fig. 1-1 (a), que cuenta con mangueras y sensores específicos. En la Fig. 1-1 (b) se muestra la evolución temporal de la humedad de suelo en un punto obtenida mediante el sensor.
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
2010
-09
-03
2010
-09
-03
2010
-09
-04
2010
-09
-05
2010
-09
-08
2010
-09
-08
2010
-09
-10
2010
-09
-13
2010
-09
-13
2010
-09
-14
2010
-09
-16
2010
-09
-17
2010
-09
-17
2010
-09
-18
2010
-09
-19
2010
-09
-19
2010
-09
-20
2010
-09
-20
(a) (b)
Fig. 1-1. Problema de control automático donde se pretende mantener la humedad de suelo en un
determinado valor especificado por el productor.
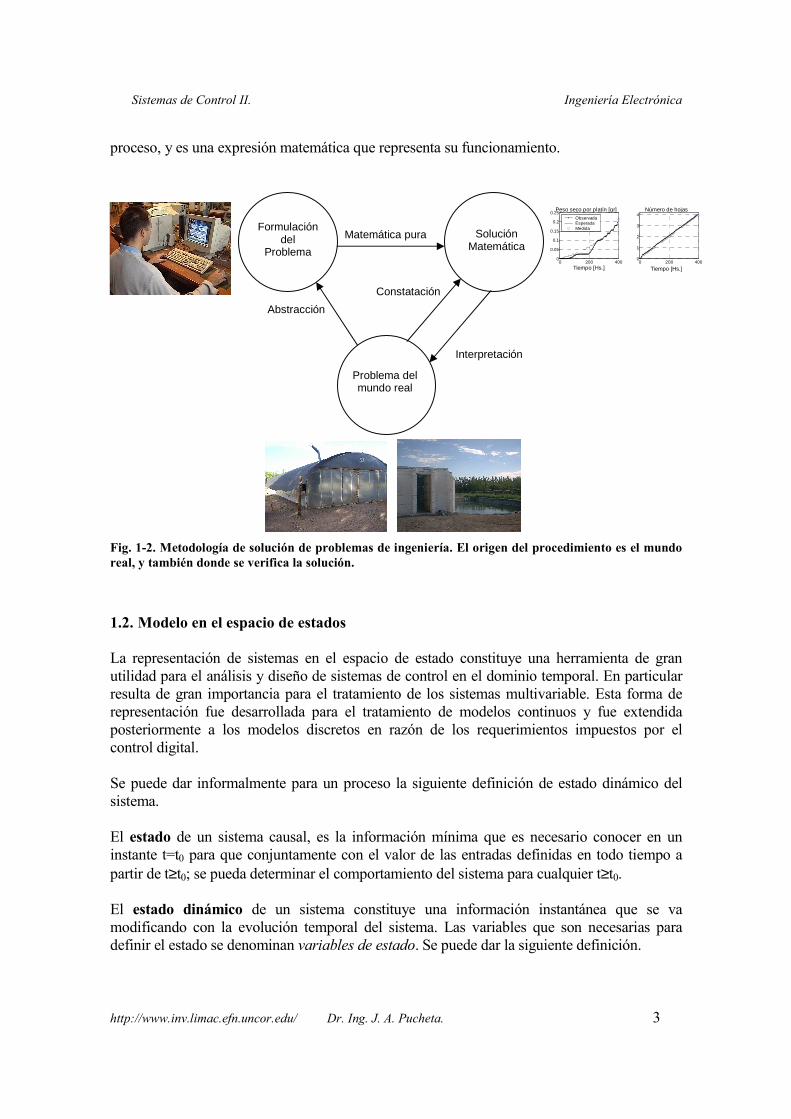
Para lograr el objetivo de control, que es manipular a las variables de tal manera que la humedad de suelo esté en los rangos deseados, se procede a utilizar la matemática para formular y resolver el problema. En la Fig. 1-2 se detalla el procedimiento general para resolver problemas de ingeniería basado en matemática aplicada. Nótese que una vez hecha la abstracción y se dispone de una expresión matemática del problema, mediante matemática pura se obtiene una solución al problema y luego se verifica en el proceso real dicha solución obtenida. La abstracción exige la determinacion de las variables, y su definición matemática mediante una expresión. La expresión puede ser en el dominio de la frecuencia, o del tiempo. Puede ser deterministica o estocástica, y las relaciones entre las variables puede ser lineal o no lineal que a su vez pueden variar o no con el parámetro tiempo. Esta abstracción se conoce como modelado del
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 3
proceso, y es una expresión matemática que representa su funcionamiento.
Fig. 1-2. Metodología de solución de problemas de ingeniería. El origen del procedimiento es el mundo
real, y también donde se verifica la solución.
1.2. Modelo en el espacio de estados
La representación de sistemas en el espacio de estado constituye una herramienta de gran utilidad para el análisis y diseño de sistemas de control en el dominio temporal. En particular resulta de gran importancia para el tratamiento de los sistemas multivariable. Esta forma de representación fue desarrollada para el tratamiento de modelos continuos y fue extendida posteriormente a los modelos discretos en razón de los requerimientos impuestos por el control digital. Se puede dar informalmente para un proceso la siguiente definición de estado dinámico del sistema. El estado de un sistema causal, es la información mínima que es necesario conocer en un instante t=t0 para que conjuntamente con el valor de las entradas definidas en todo tiempo a partir de t≥t0; se pueda determinar el comportamiento del sistema para cualquier t≥t0. El estado dinámico de un sistema constituye una información instantánea que se va modificando con la evolución temporal del sistema. Las variables que son necesarias para definir el estado se denominan variables de estado. Se puede dar la siguiente definición.
0 200 4000
0.05
0.1
0.15
0.2
0.25Peso seco por platín [gr]
Tiempo [Hs.]0 200 400
0
1
2
3
4Número de hojas
Tiempo [Hs.]
ObservadaEsperadaMedida
Formulación del
Problema Solución
Matemática
Problema del mundo real
Matemática pura
Abstracción Constatación
Interpretación

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 4
Las variables de estado constituyen el conjunto más pequeño de variables, tales que el conocimiento de las mismas en t=t0, conjuntamente con las entradas para t≥t0, determinan el comportamiento del sistema para cualquier tiempo t≥t0. De igual modo se puede definir el vector de estados, como aquél cuyas componentes están constituidas por las n variables de estado. Finalmente se define al espacio de estados como el espacio geométrico n-dimensional donde se puede representar cualquier estado por un punto. Las ecuaciones en el espacio de estado, relacionan las variables de estado con las de salida y las de entrada al proceso real. Por ello, el sistema dinámico debe incorporar elementos que memoricen los valores de las entradas para t≥ t1, siendo los integradores dispositivos con capacidad de memoria. Así, las salidas de los integradores sirven como variables de estado. Se expresa la ecuación en el espacio de estados, entonces, como
(1-1)
y la ecuación de la salida del sistema es
(1-2)
donde x es la variable de estado, u es la entrada al sistema, f(⋅) y g(⋅) son las funciones de estado y salida, respectivamente. Para que las Ecs. (1-1) y (1-2) estén en función de una única variable tiempo t, se puede expresar al sistema (1-1) como
(1-3)
y la salida resulta igual que (1-2). Si la dinámica del proceso involucra más que un integrador, entonces quedará definida una variable de estado para cada integrador. Así, para un sistema con n integradores, se define con n ecuaciones de estado y n variables de estado, y se tiene, entonces
(1-4)
y la salida resulta
(1-5)
( ) ,d;u;xfxt
t
t
0
ττ= ∫ ττ
( ),t;u;xgy ttt =
( ),t;u;xfx ttt =&
( ) ( )( ) ( )
( ) ( )t;u;x,,x,xftx
t;u;x,,x,xftx
,t;u;x,,x,xftx
tn21nn
tn2122
tn2111
L&
M
L&
L&
=
==
( ) ( ).t;u;x,,x,xgty tn21 L=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 5
En el caso de que el sistema tenga r entradas y m salidas, con una dinámica de n integradores, se tiene entonces el sistema
(1-6)
y la salida
(1-7)
quedando definida la representación en el espacio de estados de un sistema de múltiples entradas y múltiples salidas, de orden n. Si se definen vectores o arreglos a partir de cada una de las variables y ecuaciones, se obtiene
(1-8)
y la salida análogamente
(1-9)
entonces el sistema dinámico definido por las Ecs. (1-6) y (1-7) se reduce a la representación
(1-10)
para la ecuación de estados, y
(1-11)
para la ecuación de salida. Si alguna de las funciones f o g involucran a al tiempo t explícitamente, entonces se denomina sistema variante en el tiempo.
( ) ( )( ) ( )
( ) ( )t;u,,u,u;x,,x,xftx
t;u,,u,u;x,,x,xftx
,t;u,,u,u;x,,x,xftx
r21n21nn
r21n2122
r21n2111
LL&
M
LL&
LL&
=
==
( )
( )( )
( )
( )
( )( )
( )
,
t;u,,u,u;x,,x,xf
t;u,,u,u;x,,x,xf
t;u,,u,u;x,,x,xf
tu,x, ,
tx
tx
tx
t
r21n21n
r21n212
r21n211
n
2
1
=
=
LL
M
LL
LL
&
M
&
&
fx
( )
( )( )
( )
( )
( )( )
( )
( )
( )( )
( )
,
tu
tu
tu
t ,
t;t;u,,u,u;x,,x,xg
t;t;u,,u,u;x,,x,xg
t;t;u,,u,u;x,,x,xg
tu,x, ,
ty
ty
ty
t
r
2
1
r21n21m
r21n212
r21n211
m
2
1
=
=
=M
LL
M
LL
LL
Mugy
( )t, = (t) ux,fx&
( )t, = (t) ux,gy
( ) ( )( ) ( )
( ) ( )t;t;u,,u,u;x,,x,xgty
t;t;u,,u,u;x,,x,xgty
t;t;u,,u,u;x,,x,xgty
r21n21mm
r21n2122
r21n2111
LL
M
LL
LL
=
==

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 6
Las Ecs. (1-10) y (1-11) se emplean en el diseño de controladores, siempre que se considera que es no lineal con técnicas específicas (según la clase de funciones f y g) como función descriptiva, Liapunov y optimización. Cuando se linealiza a las funciones f y g en un punto de operación xOP, se obtiene la representación lineal
(1-12)
y para la salida
(1-13)
donde A(t) es la matriz de estados, B(t) es la matriz de entrada, C(t) es la matriz de salida y D(t) es la matriz de transmisión directa. En la Fig. 1-3 se representa el diagrama en bloques de éste modelo dinámico.
Fig. 1-3. Diagrama en bloques de un modelo dado por las Ecs (1-12) y (1-13).
Si las funciones vectoriales f(⋅) y g(⋅) no incorporan explícitamente al tiempo t, el sistema se denomina sistema lineal invariante en el tiempo, y las Ecs (1-12) y (1-13) se simplifican como
(1-14)
(1-15)
donde la Ec (1-14) es la ecuación de estados y la Ec (1-15) es la ecuación de salida del sistema lineal invariante en el tiempo. 1.3. Correlación entre funciones de transferencia y ecuaciones en espacio de estados
Se pretende obtener la función de transferencia de un sistema representado en el espacio de estados. Se asume un sistema de una entrada y una salida, con la función
ut ∫dt
A
yt
+
xt
C B +
D
+ + tx&
( ) ( ) ( ) ( )tttt = (t) uBxAx +&
( ) ( ) ( ) ( )tttt = (t) uDxCy +
( ) ( )tt = (t) BuAxx +&
( ) ( )tt = (t) DuCxy +
( )( ) ( )sGsU
sY =

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 7
(1-16)
donde Y, U son las salida y entrada en el dominio s del sistema. En el espacio de estados, el sistema tiene la representación de las Ecs (1-14) y (1-15), cuya transformada de Laplace es
(1-17)
(1-18)
pero como por definición de función de transferencia se consideran las condiciones iniciales nulas, lo que resulta la transformada s de la ecuación de estados en
(1-19)
que si se sustituye en la (1-18) se llega a
(1-20)
Comparando la Ec. (1-20) con la Ec (1-16), se observa que
(1-21)
que es la expresión de la función de transferencia en términos de A, B, C y D. Además, desarrollando la inversión de la matriz (sI-A), se tiene
(1-22)
se tendrá el término |sI-A| como denominador común, y como numerador un polinomio Q(s), tal que
(1-23)
de donde se concluye que |sI-A| es igual a la ecuación característica de G(s). Para el caso de que el vector u tenga r componentes y el vector y tenga m componentes, entonces la Ec (1-16) se convierte en
(1-24)
donde G(s) tiene m filas y r columnas y se denomina matriz de transferencia. 1.4. Sumario 1 INTRODUCCIÓN....................................................................................................................................... 2 1.1 Motivación………………………………………………………………………………………………2 1.2 Modelo en el espacio de estados............................................................................................................. 3 1.3 Correlación entre funciones de transferencia y ecuaciones en espacio de estados ................................. 6 1.4 Sumario .................................................................................................................................................. 14
( ) ( ) ( )sUsX = 0X-(s)sX BA +
( ) ( )sUsX = (s)Y DC +
( ) ( ) ( )sU sI= sX -1BA−
( ) , sI= (s)G -1DBAC +−
( ) ( )( )T1- sIadjsI
1sI A
AA −
−=−
( )A−sI
sQ= (s)G
( ) ( ) ( )sUsGsY =
( )[ ] ( ).sU sI = (s)Y -1DBAC +−

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 8
1.9 Bibliografía........................................................................................................................................... 16 1.5. Bibliografía [1] Ogata, K.. Modern Control Engineering. 1997. Prentice Hall. [1] Sauchelli, V. H. Sistemas de control no lineales. 1997. Universitas.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 9
1.6. Modelado en variables de estado de un sistema RLC
Con el objeto de asociar estas definiciones a la modelación de un sistema físico, se toma como ejemplo un circuito elemental RLC; representado en la Fig. 1-4.
Fig. 1-4. (a) Esquemático del circuito RLC; (b) Modelo entrada-Salida del circuito RLC
Se toma u=ve(t) como señal de entrada al sistema y la tensión vr(t) sobre el resistor R como salida. Por relaciones físicas es conocido que la evolución de las distintas variables físicas en este circuito, tales como tensiones y corrientes, quedará definida para todo t≥t0 si se conoce para un instante de tiempo t=t0, la corriente que fluye en el inductor L, la tensión que exista sobre el capacitor C y la tensión de entrada desde t0 en adelante. En base a la definición que se ha dado de variables de estado es posible elegir a la corriente en el circuito y a la tensión sobre el capacitor como variables de estado, ya que éstas definen el estado dinámico del circuito. La evolución del estado dinámico para t≥t0 se podrá determinar si se conoce para t=t0 las variables de estado i(t0), vc(t0) y además la tensión de entrada ve(t) para t≥t0. Para analizar la evolución del circuito se pueden plantear las ecuaciones diferenciales del mismo como,
(1-25)
Las Ec. (1-25) se pueden expresar en una ecuación matricial-vectorial.
(1-26)
−−
i C
1 =
dtdv
vL
1+v
L
1i
L
R=
dt
di
c
ec
[ ].v
0
L
1
+ v
i
0
C
1
L
1
L
R
=
dt
dvdt
di
ecc
−−

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 10
Definiendo a i, vc como variables de estado y a x como vector de estado, la Ec. (1-26) se convierte en
(1-27)
con
(1-28)
siendo A la matriz del sistema y b el vector de entrada. La variable de salida y=vR puede a partir del vector de estado mediante
(1-29)
con el vector de salida c definido como
(1-30)
De esta forma el circuito RLC de la Fig. 1-4 queda modelado en el espacio de estado por
(1-31)
con (t)v=y(t) (t),v=u(t) ,]vi[=x(t) reT
c siendo A, b, c definidas por las ecuaciones
(1-28) y (1-30). 1.7. Modelación de un sistema monovariable de orden n.
El sistema monovariable representado en la Fig. 1-5. Fig. 6 de orden n se puede representar como
(1-32)
Fig. 1-5. Fig. 6. Sistema monovariable de orden n.
Conociendo los parámetros ai del sistema, los valores de la variable de salida y sus derivadas
hasta la de orden n-1 en t=t0, )t(y ..., ),t(y ),ty( o1)-(n
oo & , y la entrada u(t) para t≥t0, puede
determinarse el comportamiento futuro de la salida del sistema y(t) para t≥t0. Para hacer la modelación en el espacio de estado se puede realiza la siguiente asignación:
,0
1/L = b ,
0 1/C
1/L-R/L- =A
x(t)c =y T
x(t)c = y(t)
u(t) b + Ax(t) = (t)xT
&
u(t). =y a + y a+...+ ya + y n1-n1)-(n
1(n)
&
u(t) b+A x(t)=x&
[ ].0RcT =

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 11
(1-33) De esta forma la ecuación diferencial de orden n (1-32), se puede transformar en un sistema de n ecuaciones diferenciales de primer orden
(1-34) El sistema (1-34) se puede expresar matricialmente como
(1-35) La Ec. (1-35) se puede escribir en forma compacta
(1-36) De igual modo la salida del sistema queda expresada
(1-37)
(1-38) El sistema monovariable de orden n representado por la ecuación diferencial Ec. (1-32) queda modelado en el espacio de estado por las siguientes ecuaciones diferenciales vectoriales-matriciales de primer orden
.y = x
.
.
.
y = x
y = x
1)-(nn
2
1
&
u(t). + xa -...- xa - xa - = x
x = x
.
.
.
x = x
x = x
n121-n1nn
n1-n
32
21
&
&
&
&
[ ].u
1
.
.
0
0
+
x
.
.
x
x
a-..a-
....
....
0100
0010
=
x
.
.
x
x
n
2
1
1nn
2
1
K
K
K
K
K
&
&
&
bu(t). + Ax(t) = (t)x&
x
x
x
0] 0 [1 =y
n
2
1
M
K
(t).x c = y(t) T

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 12
(1-39) siendo u la entrada al sistema, y la salida del sistema, x el vector de estado, A la matriz del sistema, b el vector de entrada y c el vector de salida.
1.7.1. Representación de sistemas multivariables
Cuando se requiere considerar varias entradas y varias salidas de un sistema simultáneamente, se recurre a la representación mostrada en la Fig. 1-7, en la cual existen interacciones múltiples de las r entradas con las m salidas. Si se desea modelar con ecuaciones diferenciales, conduce a un sistema de m×r ecuaciones diferenciales, de distinto orden que contemplan las relaciones dinámicas de todas las entradas con las distintas salidas. La de mayor orden define el orden n del sistema multivariable. Además, el orden del sistema está dado por el número mínimo de variables de estado necesarias para describir la evolución del sistema.
Fig. 1-7. Sistema Multivariable.
El sistema de las m×r ecuaciones diferenciales transformadas al dominio de la frecuencia en variable compleja s permite modelar al sistema multivariable a través de la matriz de transferencia G(s),
(1-40)
donde y(s) es el vector de salida de dimensión m, u(s) es el vector de entrada de dimensión r, y G(s) es la matriz de transferencia de dimensión m×r. Cada elemento de la matriz G(s) representa la Función de Transferencia Gij(s) de la entrada uj(s) respecto de la salida yi(s). De la misma forma que para el caso monovariable, aunque con un mayor grado de complejidad, resulta posible a través de una adecuada elección de las variables de estado, transformar todas las ecuaciones diferenciales en conjuntos de ecuaciones diferenciales de primer orden, y compactar la notación para obtener una ecuación diferencial matricial-vectorial de primer orden de la misma forma que las Ecs. (1-14) y (1-15),
(1-41)
( ) ( ) ( )su sGsy =
( ) ( ) ( )( ) ( ) ( )
tu D+t xC=ty
tu B+tA x=tx&
(t)x c = y(t)
u(t) b + A x(t) = (t)xT
&
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 13
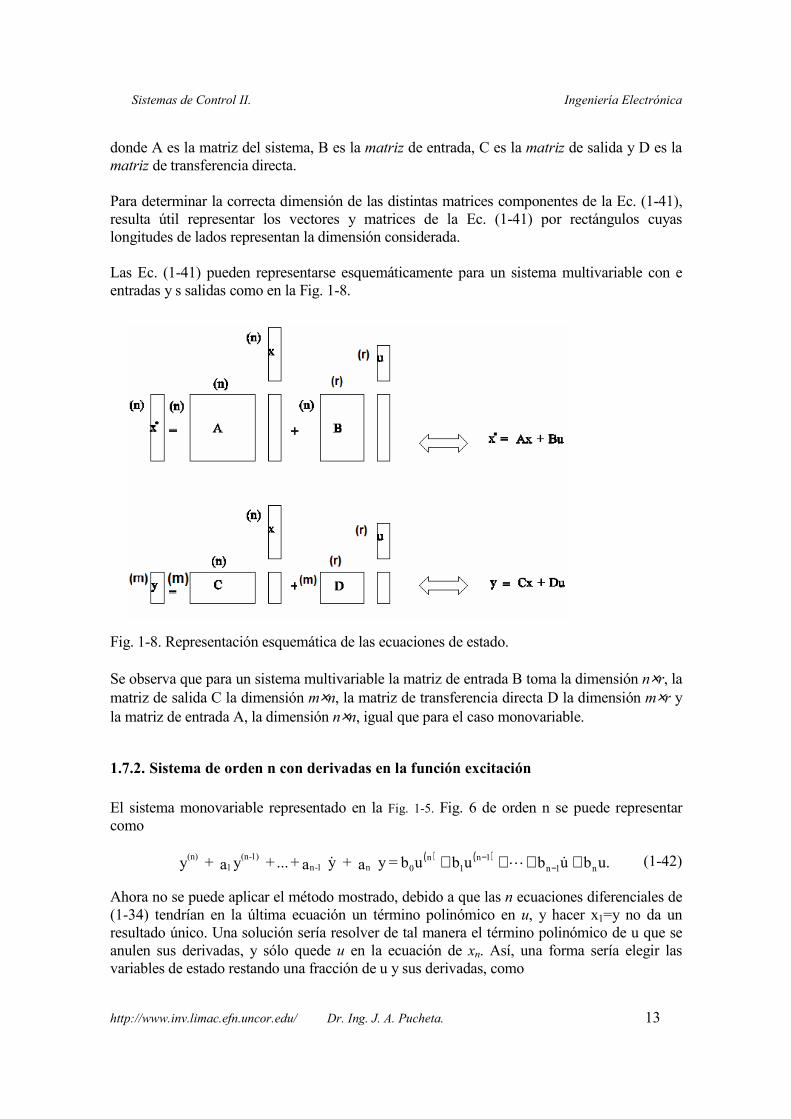
donde A es la matriz del sistema, B es la matriz de entrada, C es la matriz de salida y D es la matriz de transferencia directa. Para determinar la correcta dimensión de las distintas matrices componentes de la Ec. (1-41), resulta útil representar los vectores y matrices de la Ec. (1-41) por rectángulos cuyas longitudes de lados representan la dimensión considerada. Las Ec. (1-41) pueden representarse esquemáticamente para un sistema multivariable con e entradas y s salidas como en la Fig. 1-8.
Fig. 1-8. Representación esquemática de las ecuaciones de estado. Se observa que para un sistema multivariable la matriz de entrada B toma la dimensión n×r, la matriz de salida C la dimensión m×n, la matriz de transferencia directa D la dimensión m×r y la matriz de entrada A, la dimensión n×n, igual que para el caso monovariable.
1.7.2. Sistema de orden n con derivadas en la función excitación
El sistema monovariable representado en la Fig. 1-5. Fig. 6 de orden n se puede representar como
(1-42) Ahora no se puede aplicar el método mostrado, debido a que las n ecuaciones diferenciales de (1-34) tendrían en la última ecuación un término polinómico en u, y hacer x1=y no da un resultado único. Una solución sería resolver de tal manera el término polinómico de u que se anulen sus derivadas, y sólo quede u en la ecuación de xn. Así, una forma sería elegir las variables de estado restando una fracción de u y sus derivadas, como
( ) ( ) u.bububub =y a + y a+...+ ya + y n1n1n
1n
0n1-n1)-(n
1(n) ++++ −
−&L&

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 14
(1-43) Con ésta selección de las variables de estado la existencia y unicidad de la solución de las ecuaciones de estado queda garantizada. Aunque, no es única ésta característica ya que puede haber otra selección que también garantice la existencia y unicidad. Se obtiene, entonces
(1-44) El sistema Ec. (1-44) se puede expresar matricialmente como
(1-45) De igual modo la salida del sistema queda expresada como
(1-46) donde se tiene una representación matricial análoga a la Ec (1-39), con los términos derivativos de u afectando a la matriz B y a la D.
1.7.3. Ejemplo
(1-47)
(1-48)
Igualmente para x2,
( ) ( ).uxuuuuy = x
uxuuuy= x
uxuuy= x
uy = x
1n1n1n2n
2n
1
1n
01)-(n
n
222103
11102
01
−−−−
−−β−=β−β−−β−β−
β−=β−β−β−β−=β−β−
β−
&&L
M
&&&&&&
&&&
u(t)+xa xa - xa - = x
ux = x
ux = x
ux = x
nn121-n1nn
1nn1-n
232
121
β−−β+
β+β+
−
L&
&
M
&
&
.u +
x
x
.
x
x
a-.aa-
1...
...
0100
0010
=
x
x
x
x
n
1n
2
1
n
1n
2
1
11nnn
1n
2
1
β
β
β
β
−
−−
−
−
M
K
K
MK
K
K
&
&
M
&
&
,u
x
x
x
0] 0 [1 =y 0
n
2
1
β+
M
K
uu=y +yy &&&& ++
uyxuyx 0101 &&& β−=⇒β−=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 15
(1-49)
de aquí que (1-50)
y también que
(1-51) Por lo tanto, introduciendo la derivada segunda de y en la (1-51)
(1-52) con β0=0 y β1=1, se anula la derivada de u, resulta el sistema
(1-53) de donde se obtiene
[ ] [ ].0D,01C,0
1b,
11
10A ==
=
−−=
Con Matlab, la operación inversa es [N,D]=ss2tf([0 1;-1 -1], [1;0],[1,0],[0]) N = 0 1.0000 1.0000 D = 1.0000 1.0000 1.0000 que verifica la expresión (1-47).
1.7.4. Ejercicios sugeridos
Capitulo 3 de Ogata, ejercicios A.3.3, A.3.4, B.3.5, B.3.6, B.3.15. 1.8. Sumario 1.6 Modelado en variables de estado de un sistema RLC............................................................................. 9 1.7 Modelación de un sistema monovariable de orden n. ............................................................................. 10 1.7.3 Ejercicios sugeridos 1.8 Sumario .................................................................................................................................................. 14 1.9 Bibliografía........................................................................................................................................... 16
( ) ( )122
10011022
xxx
uuuxuuxuux
−−=β−β−β+−β+β+−+=
&
&&&&&&
−−=+=
212
21
xxx
uxx
&
&
uxuuyx 11102 β−=β−β−= &&&
uxx 121 β+=&
uuyx 102 &&&&&& β−β−=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 16
1.9. Bibliografía
[1] Ogata, K.. Modern Control Engineering. 1997. Prentice Hall.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 17
2. Análisis en el espacio de estados
2.1. Representaciones en espacio de estados de función de transferencia de sistemas
Como ya se ha visto, existen diversas técnicas para la obtención de representaciones de espacios de estado de las funciones de transferencia de sistemas. Ahora se presentan las formas canónicas controlable, observable, diagonal y de Jordan.
(2-1) donde u es la entrada y y es la salida, ecuación que también puede escribirse como
(2-2) Se va a representar al sistema definido por las Ecs. (2-1) o (2-2) en la forma canónica controlable, en la forma canónica observable y en la forma canónica diagonal o Jordan.
2.1.1. Carácter no único de la representación lineal en variables de estado
Existen numerosas representaciones, partiendo de la transformación lineal del estado x,
(2-3)
(2-4)
(2-5)
Reemplazando en el sistema lineal se obtiene
(2-6)
(2-7)
Obteniendo un nuevo sistema
(2-8)
(2-9)
Con z0=T
-1x(0).
( ) ( ) ubububub =y a + y a+...+ ya + y n1n1n
1n
0n1-n1)-(n
1(n) ++++ −
−&L&
( )( ) .
a+sa++sa + s
bsbsbsb
sU
sY
n1-n1n
1n
n1n1n
1n
0
L
L
−−
− ++++=
Txz =
zTx 1−=
zTx &&1−=
( ) ( )tt = (t) 1TBuzATTz +−
&
( ) ( )tt = (t) 1 DuxCTy +−
( ) ( )ttA= (t) **uBzz +&
( ) ( )ttC = (t) * Duxy +

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 18
2.1.2. Forma canónica controlable
En la representación en el espacio de estados del sistema definido por las Ecs. (2-1) o (2-2)
(2-10)
(2-11)
las matrices A, B, C y D se definen como
(2-12)
(2-13)
2.1.3. Forma compleja o conjugada
(2-14) Donde α±β son los autovalores complejos conjugados de la matriz de estados.
2.1.4. Ejemplo de aplicación
Como ejemplo de aplicación, expresar al sistema
(2-15) en las formas canónicas definidas de las representaciones en espacio de estado.
( ) ( )tt = (t) BuAxx +&
( ) ( )tt = (t) DuCxy +
1
.
.
0
0
= B,
a-..a-
1...
....
0100
0010
=A
1n K
K
K
K
K
].[b = d
ba-b
ba-b
ba-b
C 0
011
01-n1-n
0nn
T
=M
( )( ) 2s3s
3s
sU
sY2 ++
+=
αβ−βα
=A

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 19
Recordar: Los autovalores de A son las raíces de la Ecuación característica. 2.2. Sumario 2. ANÁLISIS EN EL ESPACIO DE ESTADOS ........................................................................................................... 17 2.1. Representaciones en espacio de estados de función de transferencia de sistemas ................................ 17 2.1.1. Forma canónica controlable................................................................................ 18 2.1.2. Forma canónica observable ................................................................................ 54 2.1.3. Forma canónica diagonal.................................................................................... 54 2.1.4. Forma canónica de Jordan. ................................................................................. 55
6.5.4. Forma canónica de Jordan. ................................................................................. 55
2.1.3. Forma compleja o conjugada ................................................................................. 18 2.2. Bibliografía........................................................................................................................................... 19
2.3. Bibliografía [1] Ogata, K.. Modern Control Engineering. 1997. Prentice Hall. Pag 752.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 20
3. Solución de la ecuación de estados Dado el sistema modelado mediante
(3-1)
(3-2)
con las matrices A, B, C y D definidas con valores reales, se pretende hallar la expresión del vector x en función de u, para lo cual se tiene que resolver una EDO no homogénea. Por lo tanto, se comienza el cálculo con u=0 para obtener una solución de la EDO homogenea
(3-3)
con una condición inicial dada para xt en t0. Se propone entonces la solución como
(3-4)
de donde se deduce que para t=0
(3-5)
Derivando respecto a t a la Ec (3-4),
(3-6)
que debe ser igual a A premultiplicada por la Ec (3-4),
(3-7)
y se puede comparar cada término como potencia de t entre las Ecs (3-6) y (3-7), usando la condición inicial (3-5) se obtiene b1 como
(3-8)
luego lo reemplazo en la siguiente para hallar b2,
(3-9)
(3-10)
y así hasta
(3-11)
Reemplazando estos coeficientes en la expresión (3-4) propuesta para xt, se tiene
(3-12)
(3-13)
( ) ( )tt = (t) BuAxx +&
( ) ( )tt = (t) DuCxy +
( )t = (t) Axx&
nn
2210t tbtbtbb L+++=x
.b 00 x=
1nn21 tnbtb2b −+++= L&x
nn
2210t tAbtAbtAbAb ++++= L&x
01 Ab x=
02
12 A2
1Ab
2
1b x==
03
023 A6
1xAb
3
1b x==
0n
01nn A!n
1xAb
n
1b x== −
LL +++++= 0nn
022
00t tA!n
1tA
2
1At xxxxx
.etA!n
1tA
2
1AtI 0
At0
nn22t xxx =
++++= L

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 21
Se puede hacer la asignación
(3-14)
y por lo tanto
(3-15)
siendo la solución de la EDO homogénea
(3-16)
y es la función de transición de estados del vector xt. Propiedades
1- ΦΦΦΦo=exp( A0)=I 2- ΦΦΦΦt=exp(At)=[exp(-At)]-1=[ΦΦΦΦ(-t)]
-1y también ΦΦΦΦt-1=ΦΦΦΦt
3- ΦΦΦΦt1+t2=exp(t1+t2)=exp(At1)exp(At2)= ΦΦΦΦt1ΦΦΦΦt2 =ΦΦΦΦt2 ΦΦΦΦt1 4- [ΦΦΦΦt ]
n=ΦΦΦΦ(nt) 5- ΦΦΦΦt2-t1 ΦΦΦΦt1-t0=ΦΦΦΦt2-t0=ΦΦΦΦt1-t0ΦΦΦΦt2-t1
Para hallar la solución de la EDO no homogénea, con u≠0, se procede, agrupando las variables en la Ec (3-1),
(3-17)
y premultiplicando miembro a miembro por la matriz Ate− , se tiene
(3-18)
Se sabe que
(3-19)
Trabajando con el primer miembro de la Ec (3-18), se deriva la siguiente igualdad
(3-20)
que significa
(3-21)
Ahora se integra respecto al tiempo ∀t∈[t0,t] en ambos miembros, y se obtiene
(3-22)
donde x0 surge de la constante de integración y asignar t=0. Premultiplicando miembro a miembro por eAt se obtiene la solución x(t) como,
( )( ) ( )tt - (t) BuAxx =&
( )( ) ( ).tet - (t)e AtAtBuAxx
−− =&
( ).vuuv
dt
uvd&& +=⋅
( )( ) ( ) ( ) ( ) ( )( )tAtetetAedt
ted AtAtAtAt
xxxxx −=+−= −−−
−
&&
( )( ) ( ).tedt
ted AtAt
Bux −
−
=
Att e=Φ
( )stAst e −
− =Φ
( )0ttt t0xΦx −=
( ) ( ) 0
t
0
AsAt dssete xBux += ∫−−
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 22
(3-23)
3.1.1. Análisis de trayectorias en sistemas de 2do orden
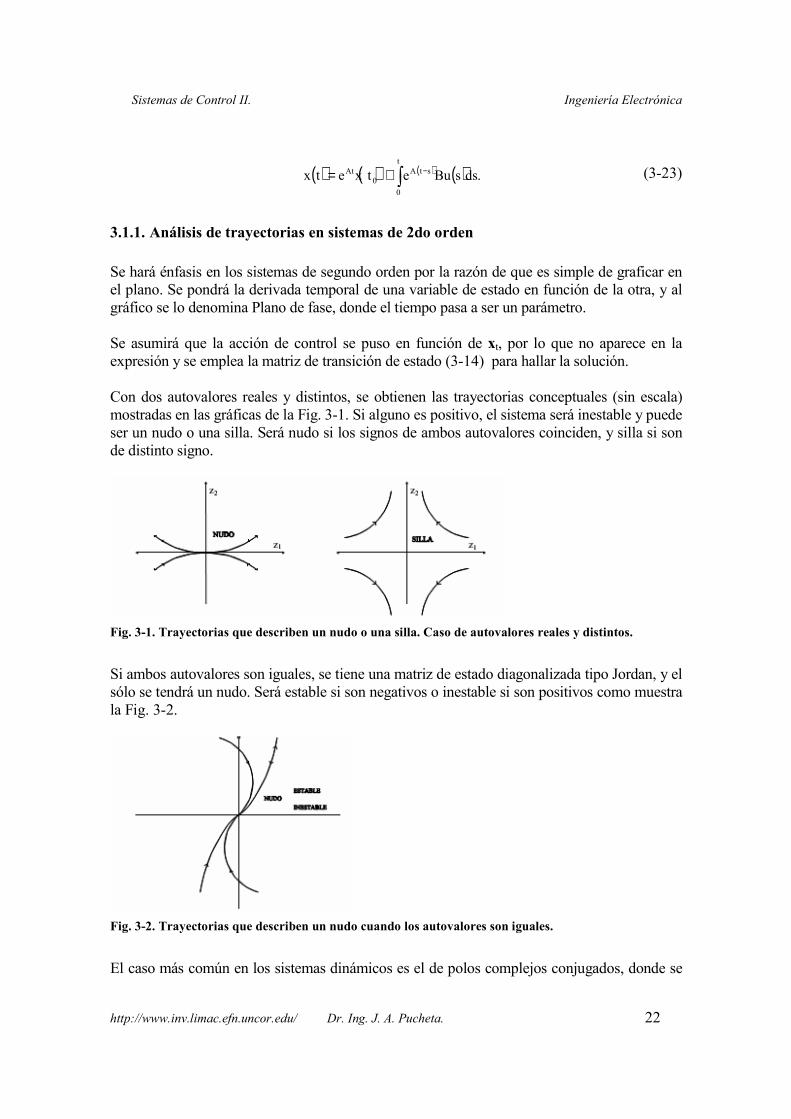
Se hará énfasis en los sistemas de segundo orden por la razón de que es simple de graficar en el plano. Se pondrá la derivada temporal de una variable de estado en función de la otra, y al gráfico se lo denomina Plano de fase, donde el tiempo pasa a ser un parámetro. Se asumirá que la acción de control se puso en función de xt, por lo que no aparece en la expresión y se emplea la matriz de transición de estado (3-14) para hallar la solución. Con dos autovalores reales y distintos, se obtienen las trayectorias conceptuales (sin escala) mostradas en las gráficas de la Fig. 3-1. Si alguno es positivo, el sistema será inestable y puede ser un nudo o una silla. Será nudo si los signos de ambos autovalores coinciden, y silla si son de distinto signo.
Fig. 3-1. Trayectorias que describen un nudo o una silla. Caso de autovalores reales y distintos.
Si ambos autovalores son iguales, se tiene una matriz de estado diagonalizada tipo Jordan, y el sólo se tendrá un nudo. Será estable si son negativos o inestable si son positivos como muestra la Fig. 3-2.
Fig. 3-2. Trayectorias que describen un nudo cuando los autovalores son iguales.
El caso más común en los sistemas dinámicos es el de polos complejos conjugados, donde se
( ) ( ) ( ) ( ) .dssBuetxetxt
0
stA0
At
∫−+=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 23
presentan de forma compleja conjugada. Si tienen la parte real distinta de cero, será un foco, y si es igual a cero será un centro lo que describen las trayectorias del sistema. Cuando la parte real sea negativa, el foco será estable como se observa en la Fig. 3-3.
Fig. 3-3. Trayectorias que describen un foco o un centro, según los autovalores complejos conjugados.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 24
4. Diseño de control lineal en variables de estados en tiempo continuo El diseño de controladores para procesos reales puede encararse de diversos modos, dependiendo de las necesidades del usuario y los requerimientos del comportamiento del proceso. Cada metodología de diseño comienza con la fijación de un modelo del proceso, que puede definirse en el dominio del tiempo o en el dominio de la frecuencia. Aquí va a detallarse una metodología en el dominio del tiempo, siguiendo la representación de sistemas en variables de estados. 4.1. Diseño de controladores de estado lineales
Existen diversos esquemas de control, basados en la teoría de Entrada-Salida y en la de variables de estado. A continuación se muestran los esquemas más difundidos.
4.1.1. Controlador en esquema Entrada-salida
Se realimenta el error de control, definido como et=yd-yt. Los esquemas más difundidos son los del tipo Proporcional Integral Derivativo PID, con sus diversas variantes, por ejemplo, Modificado, con predictor, con anti-wind up, auto sintonía, etc.
yt et
Proceso Controlador
yd
ut
-
Fig. 4-1. Esquema de control en la representación de sistemas Entrada-Salida.
Nótese que en la Fig. 4-1 sólo se está midiendo yt que es la variable de salida, quedando todas las demás variables fuera de las entradas del controlador. Frecuentemente, a igualdad de costo en los sensores, ésas variables intermedias se pueden medir con mayor exactitud.
4.1.2. Controlador en esquema de Espacio de estados
Se realimenta el estado del proceso, x(t).

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 25
Fig. 4-2. Esquema de control basado en realimentación de estados.
En el esquema de la Fig. 4-2 se destaca la posibilidad de medir las variables convenientes del proceso, incluida la yt, Para realizar el diseño del Controlador, se utiliza el concepto de Diseño de controladores en variables de estado. 4.2. Esquema básico del controlador lineal de estado Dado el sistema lineal determinístico en tiempo continuo
(4-1)
(4-2)
Se controla la regulación del sistema mediante un controlador lineal, del tipo
(4-3)
donde K es la matriz (o vector) del controlador. El esquema de control se muestra en la Fig. 4-3.
Fig. 4-3. Esquema de control óptimo en tiempo continuo.
rt ut Proceso
Controlador
yt
et
-
xt
xt ∫ ⋅ dt ut
x0
C B
x& yt
K
xD
A
-
( )tKu t x⋅−=
( ) ( )tt = (t) BuAxx +&
( ) ( )tt = (t) DuCxy +

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 26
La solución del sistema de lazo cerrado resulta, para xD=0,
(4-4)
Para establecer el valor de la matriz K del controlador, existen diversas metodologías. En el ámbito de diseño de controladores de estado lineales, las metodologías más difundidas son Asignación de polos y Funcional de costo. No obstante, para lograr encontrar al controlador K, el sistema de cumplir con la condición de Controlabilidad, que es una característica que puede calcularse antes que el controlador. 4.3. Controlabilidad
El concepto de controlabilidad establece que (4-1) es controlable si es posible generar una acción de control ut para transferir al sistema desde cualquier condición inicial a cualquier condición final en un intervalo de tiempo finito. Si cada estado es controlable, entonces se dice que el sistema es completamente controlable. Para deducir la condición de controlabilidad, se asumirá que el estado final será el origen a un tiempo t1, y que t0 será 0. Aplicando ésta condición a la solución
(4-5)
se obtiene
(4-6)
Ahora se reemplazará a e-At por su equivalente analítico. Por lo tanto, se introduce la igualdad
(4-7)
que es útil para evaluar analíticamente a la función eAt. Las funciones temporales αi(t) dependen de los autovalores de A, siendo solución del sistema de ecuaciones
(4-8)
para autovalores de A reales y distintos. Si los autovalores de A fuesen repetidos o conjugados, el cálculo de los αi(t) es mas engorroso pero análogo al mostrado.
( ) .e 0t
t xx BKA ⋅−=
( ) ( ) ( ) ( ) ( )∑−
=
−− α=α++α+α+α=
1n
0k
kk
1n1n
2210
At AtAtAtAtIte L
( ) ( ) ( ) ( )( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
λα++λα+λα+α=
λα++λα+λα+α=
λα++λα+λα+α=
−−
λ
−−
λ
−−
λ
1nn1n
2n2n10
t
1n21n
222210
t
1n11n
212110
t
tttte
tttte
tttte
n
2
1
L
M
L
L
( ) ( ) ( ) ( )∫−+=
t
0
stA0
At dssBuetxetx
( ) ( ) .dssBue0x1t
0
As
∫−−=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 27
Reemplazando entonces la igualdad (4-7) en la Ec. (4-6), se obtiene
(4-9)
donde puede simplificarse la expresión si se calculan las integrales temporales, obteniéndose valores βk, como
(4-10)
Así, la Ec. (4-9) resulta en
(4-11)
Puede escribirse entonces, en forma de producto matricial de una matriz y un vector,
(4-12)
donde se deduce que la Ec. (4-12) debe tener solución para cualquier x(0), siendo la incógnita los βk que contienen a ut. Por lo tanto, la matriz
(4-13)
debe tener rango n, y ser invertible para hallar éstos valores βk. Ésta es la matriz de controlabilidad M. Nótese que la prueba de controlabilidad no requiere resolver la ecuación diferencial del sistema, sino que se construye con las matrices de Estado y de Entrada del sistema (4-1). 4.4. Diseño mediante asignación de polos
El diseño de controladores mediante asignación de polos es directa, como puede verse en la Literatura (Ogata, Pag 789 s 792). Se define a una matriz de trasformación
(4-14)
donde M es la matriz de controlabilidad definida como
(4-15)
y la matriz W definida como
(4-16)
donde los coeficientes ai son los que aparecen en el polinomio característico
MWT =
[ ]BA|AB|BM1n−= L
=−−
−−
0001
01a
01aa
1aaa
1
3n2n
12n1n
L
ML
MMOMM
L
L
W
( ) ( ) ( )∑ ∫−
=
α−=1n
0k
t
0
kk
1
dssus0x BA
( ) ( ) .dssus k
t
0
k
1
β=α∫
( ) ∑−
=β−=
1n
0kk
k .0x BA
( ) [ ]
β
ββ
⋅−=
−
−
1n
1
0
0xM
L BA|AB|B1n
[ ] M=− BA|AB|B 1nL
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 28
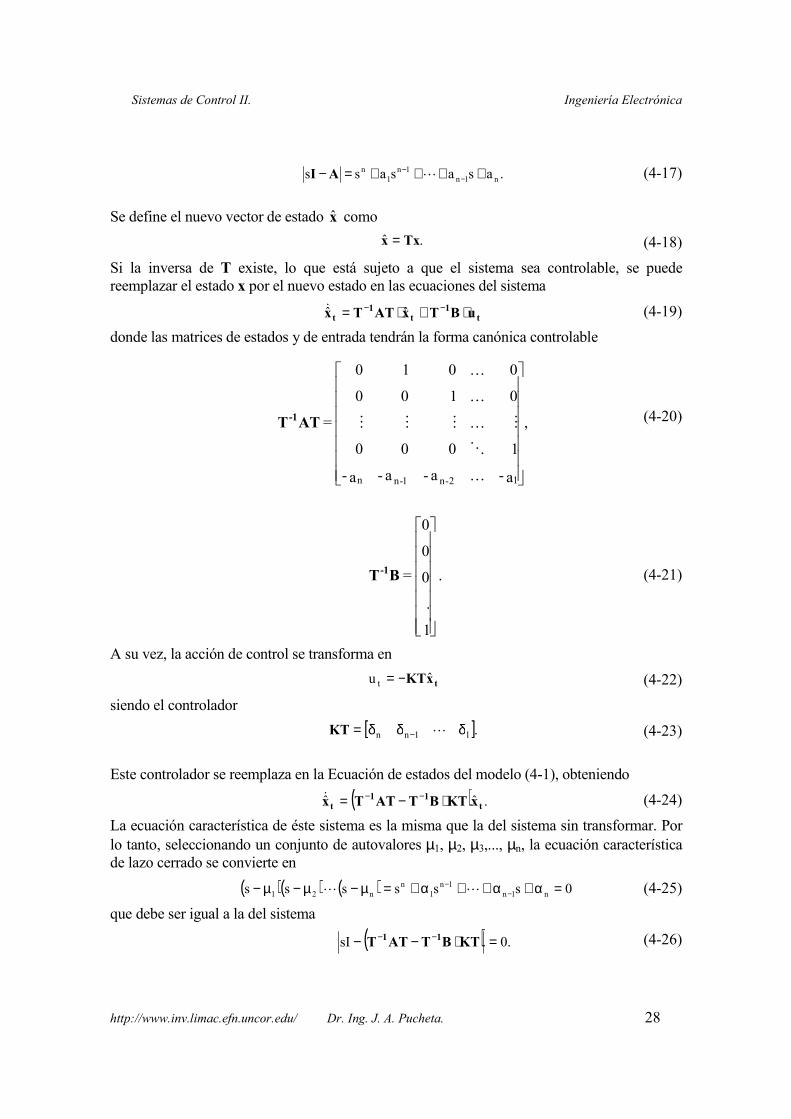
(4-17)
Se define el nuevo vector de estado x como
(4-18)
Si la inversa de T existe, lo que está sujeto a que el sistema sea controlable, se puede reemplazar el estado x por el nuevo estado en las ecuaciones del sistema
(4-19)
donde las matrices de estados y de entrada tendrán la forma canónica controlable
(4-20)
(4-21)
A su vez, la acción de control se transforma en
(4-22)
siendo el controlador
(4-23)
Este controlador se reemplaza en la Ecuación de estados del modelo (4-1), obteniendo
(4-24)
La ecuación característica de éste sistema es la misma que la del sistema sin transformar. Por lo tanto, seleccionando un conjunto de autovalores µ1, µ2, µ3,..., µn, la ecuación característica de lazo cerrado se convierte en
(4-25)
que debe ser igual a la del sistema
(4-26)
.asasass n1n1n
1n ++++=− −
−LAI
.ˆ Txx =
t1
t1
t uBTxATTx ⋅+⋅= −− ˆ&
,
a-a-a-a-
1000
0100
0010
=
12-n1-nn
K
O
MKMMM
K
K
ATT1-
( )( ) ( ) 0ssssss n1n1n
1n
n21 =α+α++α+=µ−µ−µ− −−
LL
txKTˆu t −=
( ) .ˆˆ t11
t xKTBTATTx ⋅−= −−&
( ) .0sI =⋅−− −−KTBTATT
11
[ ].11nn δδδ= − LKT
.
1
.
0
0
0
=
BT 1-

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 29
Así, reemplazando los valores obtenidos por las Ec (4-20), (4-22) y (4-23) , se tiene que
(4-27)
y operando para calcular la ecuación característica en términos de los coeficientes de diseño,
(4-28)
y resolviendo el determinante se llega a
(4-29)
que si se iguala a la Ecuación característica definida en la Ec. (4-25), se concluye que pueden despejar los valores δ para construir el controlador de la Ec. (4-23), que resulta
(4-30)
de donde puede despejarse K
(4-31)
El diseño del controlador comienza ubicando a los polos µi, que son los polos de lazo cerrado. Luego, mediante la Ec. (4-25) se obtienen los coeficientes αi, y resolviendo la Ec. (4-31) se obtiene el controlador K. Nótese que éste método tiene como ventaja de que es un método simple y directo. No obstante, no se tiene en cuenta el efecto conjunto de los polos en el comportamiento del sistema, ni tampoco la magnitud de las acciones de control. El método requiere de iteraciones prueba y error hasta encontrar la respuesta adecuada.
[ ] 0
1
.
0
0
0
a-a-a-a-
1000
0100
0010
s 11nn
12-n1-nn
=δδδ
+
− − L
K
O
MKMMM
K
K
I
0
asaa
1000
01-s0
001-s
111n1-nnn
=
δ++δ+δ+
−
− K
O
MKMMM
K
K
( ) ( ) ( ) 0asasas nn1n1n1n
11n =δ++δ+++δ++ −−
−L
[ ]111n1nnn aaa −α−α−α= −− LKT
[ ] .aaa 1111n1nnn
−−− −α−α−α= TK L

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 30
4.5. Observabilidad
La implementación de un controlador en el esquema de variables de estado exige la medición de todas las componentes del vector de estado. Esto no siempre es posible, por lo que se requiere de un mecanismo de cálculo que mida la salida y genere el vector de estados. Éste mecanismo se denomina observador, y se expresa como
(4-32)
donde Rm es el espacio de la salida y y Rn es el espacio de x. Se logra obtener a x a partir de mediciones de y, implementando el esquema de la Fig. 4-4.
Fig. 4-4. Diagrama en bloques del sistema lineal con observador.
No obstante, en el marco de los sistemas lineales, sólo es posible la generación de x si el sistema es Observable. Un sistema lineal con salida yt se denomina observable si cualquier estado xt del mismo, puede ser determinado a partir de valores de la salida yt, en un tiempo finito. Se hace aquí un análisis del concepto de observabilidad para un sistema monovariable. Las ecuaciones que modelan el sistema en el espacio de estado son
-
yt
+
+ ut ∫dt
A
xt
C B tx&
KO
∫dt
A
tx
C B tx&
K
+
ty
et
,RR:K nmO →

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 31
(4-33)
(4-34)
se sabe que la solución del sistema es
(4-35)
de donde se obtiene la salida y(t) como
(4-36)
Sabiendo que
(4-37)
se reemplaza en la (4-36) y se llega a
(4-38)
Para despejar x0, sólo debe expresar como producto de matrices al primer término, ya que el resto es dato,
(4-39)
y también, en forma vectorial,
(4-40)
Este planteo debe permitir el cálculo para cualquier vector de αi(t) y de x0, por lo que la matriz
(4-41)
es la que debe tener rango n para poder hallar su inversa en el cálculo y obtener x(t0).
( ) ( )tt = (t) BuAxx +&
( ) ( )tt = (t) DuCxy +
( )∑−
=α=
1n
0k
kk
At Ate
( ) ( ) ( ) ( )∫−+=
t
0
stA0
At dssBuetxetx
( ) ( ) ( ) ( ) ( ).tDudssBuCetxCetyt
0
stA0
At ++= ∫−
( ) ( ) ( ) ( ) ( ) ( ).tDudssBuAstCtxAtCtyt
0
1n
0k
kk0
1n
0k
kk +−α+α= ∫ ∑∑
−
=
−
=
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( )01n
1n2
210
t
0
1n
0k
kk txAtAtAtItCtDudssBuAstCty −
−
−
=
α++α+α+α=+−α− ∫ ∑ L
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )[ ] ( ).tx
CA
CA
CA
C
tttttDudssBuAstCty 0
1n
21n210
t
0
1n
0k
kk ⋅
⋅αααα=+−α−
−
−
−
=∫ ∑
M
L
=
−1n
2
CA
CA
CA
C
P
M

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 32
4.6. Dualidad de los procesos lineales
La propiedad de dualidad relaciona a los conceptos de controlabilidad y observabilidad. Sea el sistema S1 definido como
(4-42)
donde x∈Rn, y∈Rm; A∈Rn×n, B∈Rn×r y C∈Rm×n. Sea el sistema S2 definido como el sistema dual de S1, con
(4-43)
donde z∈Rn, v∈Rm, η∈Rr. Además, la matriz de controlabilidad para el sistema S1 es la definida por la Ec (4-15) y la de observabilidad es la Ec (4-41). Por otro lado, las matrices de controlabilidad y observabilidad para el sistema S2 son
(4-44)
y la matriz
(4-45)
Entonces, el sistema S1 es completamente controlable (observable) si y solo si el sistema S2 es completamente observable (controlable). El sistema S1 es estable si y sólo si sistema dual S2 es estable. Esto explica la simetría que se encuentra en los resultados obtenibles para controlabilidad y observabilidad. La correspondiente demostración se encuentra en la bibliografía. Estas propiedades son de utilidad para el tratamiento de los sistemas de control con observador. El cálculo del observador de la Ec. (4-32) se puede hacer a través del sistema dual, empleando la técnica de asignación de polos para el controlador. 4.7. Control de un sistema con observador
Para aplicar los conceptos de vistos, se propone el diseño de un sistema controlado mediante el esquema de variables de estado, incorporando un observador. Sea el sistema lineal descrito por
( ) ( )( )
+
=t = (t)
tt = (t):S1
Cxy
BuAxx&
( ) ( )( )
η+
=tzB = (t)
tvCtz = (t)z:S
T
TT
2C
A&
( )
( )
.
AB
AB
AB
B
P
1nTT
2TT
TT
T
=
−M
( )[ ]TTTTT CCC 1nAAM
−= L
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 33
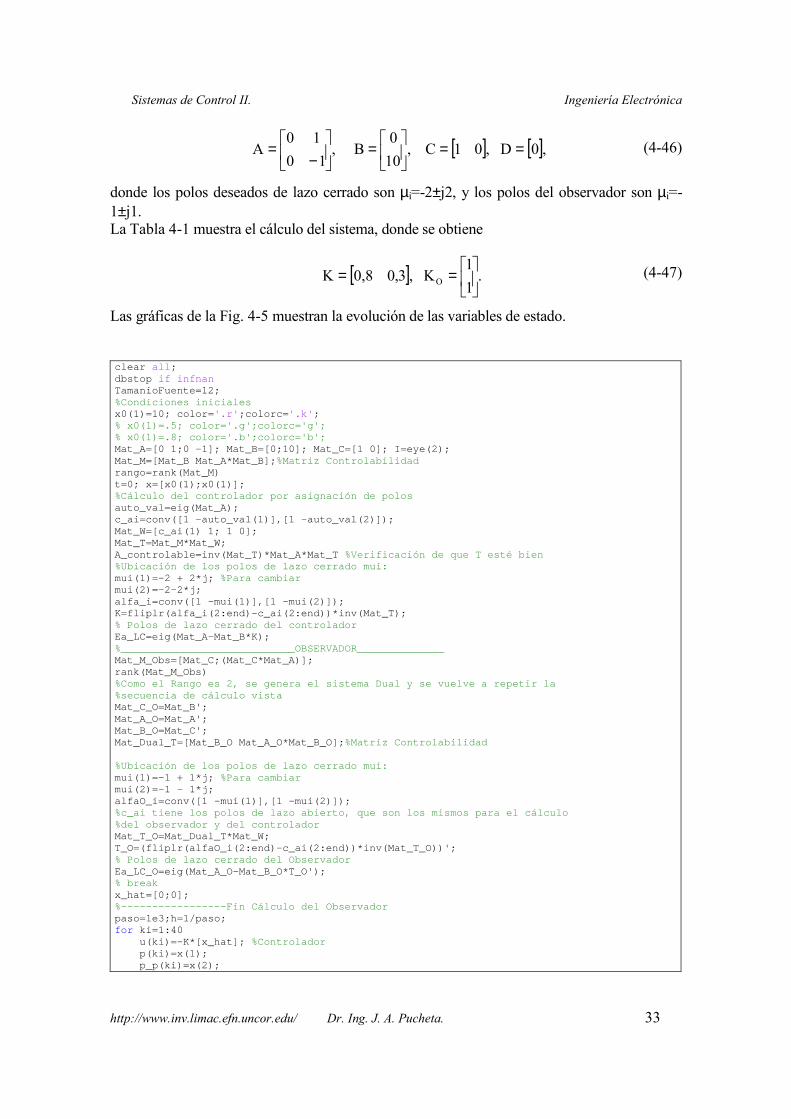
(4-46)
donde los polos deseados de lazo cerrado son µi=-2±j2, y los polos del observador son µi=-1±j1. La Tabla 4-1 muestra el cálculo del sistema, donde se obtiene
(4-47)
Las gráficas de la Fig. 4-5 muestran la evolución de las variables de estado. clear all ; dbstop if infnan TamanioFuente=12; %Condiciones iniciales x0(1)=10; color= '.r' ;colorc= '.k' ; % x0(1)=.5; color='.g';colorc='g'; % x0(1)=.8; color='.b';colorc='b'; Mat_A=[0 1;0 -1]; Mat_B=[0;10]; Mat_C=[1 0]; I=eye( 2); Mat_M=[Mat_B Mat_A*Mat_B]; %Matriz Controlabilidad rango=rank(Mat_M) t=0; x=[x0(1);x0(1)]; %Cálculo del controlador por asignación de polos auto_val=eig(Mat_A); c_ai=conv([1 -auto_val(1)],[1 -auto_val(2)]); Mat_W=[c_ai(1) 1; 1 0]; Mat_T=Mat_M*Mat_W; A_controlable=inv(Mat_T)*Mat_A*Mat_T %Verificación de que T esté bien %Ubicación de los polos de lazo cerrado mui: mui(1)=-2 + 2*j; %Para cambiar mui(2)=-2-2*j; alfa_i=conv([1 -mui(1)],[1 -mui(2)]); K=fliplr(alfa_i(2:end)-c_ai(2:end))*inv(Mat_T); % Polos de lazo cerrado del controlador Ea_LC=eig(Mat_A-Mat_B*K); %____________________________OBSERVADOR____________ __ Mat_M_Obs=[Mat_C;(Mat_C*Mat_A)]; rank(Mat_M_Obs) %Como el Rango es 2, se genera el sistema Dual y se vuelve a repetir la %secuencia de cálculo vista Mat_C_O=Mat_B'; Mat_A_O=Mat_A'; Mat_B_O=Mat_C'; Mat_Dual_T=[Mat_B_O Mat_A_O*Mat_B_O]; %Matriz Controlabilidad %Ubicación de los polos de lazo cerrado mui: mui(1)=-1 + 1*j; %Para cambiar mui(2)=-1 - 1*j; alfaO_i=conv([1 -mui(1)],[1 -mui(2)]); %c_ai tiene los polos de lazo abierto, que son los mismos para el cálculo %del observador y del controlador Mat_T_O=Mat_Dual_T*Mat_W; T_O=(fliplr(alfaO_i(2:end)-c_ai(2:end))*inv(Mat_T_O ))'; % Polos de lazo cerrado del Observador Ea_LC_O=eig(Mat_A_O-Mat_B_O*T_O'); % break x_hat=[0;0]; %-----------------Fin Cálculo del Observador paso=1e3;h=1/paso; for ki=1:40 u(ki)=-K*[x_hat]; %Controlador p(ki)=x(1); p_p(ki)=x(2);
[ ] [ ],0D ,01C ,10
0B ,
10
10A ==
=
−=
[ ] .1
1K ,3,00,8K O
==

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 34
p_O(ki)=x_hat(1); p_p_O(ki)=x_hat(2); y_sal(ki)=Mat_C*x; xp=Mat_A*x+Mat_B*u(ki); for integ=1:paso/10 x=x+h*xp; end %________OBSERVADOR__________ y_sal_O(ki)=Mat_C_O*x_hat; x_hatp=Mat_A_O*x_hat+Mat_B_O*u(ki)+T_O*(y_sal(k i)-y_sal_O(ki)); for integ=1:paso/10 x_hat=x+h*x_hatp; end end p(ki+1)=x(1); p_p(ki+1)=x(2); p_O(ki+1)=x_hat(1); p _p_O(ki+1)=x_hat(2); dbclear if infnan u(ki+1)=-K*[x_hat]; t=[0:ki]*h; figure(1);hold on; subplot(2,2,1);hold on;plot(t,p,color);plot(t,p_O,colorc);grid on; title( 'x_1' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);hold on;plot(t,p_p,color);plot(t,p_p_O,colorc);gris on;title( 'x_2' , 'FontSize' ,TamanioFuente);hold on; subplot(2,1,2);plot(t,u,color);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on;
Tabla 4-1. Algoritmo del ejemplo de control en variables de estado con observador.
0 0.01 0.02 0.03 0.04-100
-50
0
50
100
x1
0 0.01 0.02 0.03 0.04-150
-100
-50
0
50
100
x2
0 0.005 0.01 0.015 0.02 0.025 0.03 0.035 0.04-100
-50
0
50
100Acción de control
Tiempo en Seg.
Fig. 4-5. Evolución temporal de las variables de estado del sistema y de las observadas del ejemplo,
para diferentes condiciones iniciales.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 35
4.7.1. Ejemplo Péndulo invertido
Para el sistema carro-barra de la Fig. 4-6, diseñar un controlador de estados en el dominio del tiempo continuo sabiendo que las ecuaciones que describen al ángulo y al desplazamiento son,
(4-48)
y que las matrices A y B, (tomadas de Sontag Pag. 91 y 92) del sistema linealizado para ángulo pequeño es
(4-49)
Se pide realizar el cálculo del controlador mediante asignación de polos y generar las trayectorias del sistema mediante simulación para ángulos iniciales de 0,1 0,5 y 0,8 radiantes. Considerar que la fuerza u debe cumplir con la restricción -10≤u≤10.
Fig. 4-6. Diagrama del sistema carro-barra para el péndulo invertido.
Los resultados de la simulación están en las figuras Fig. 4-7 y Fig. 4-8, utilizando el código para Matlab de la Tabla 4-2.
( )
=φδ+φ−φ
=δ+φφ−φφ+δ+
0cosgsenl
uFsenmlcosmlmM 2
&&&&
&&&&&&
( )
−
=
+
−−=
lM
10M
10
B ,
0lM
Mmg
lM
F0
1000
0M
mg
M
F0
0010
A

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 36
clc;clear all ; m=.1;Fricc=0.1; long=0.6;g=9.8;M=.5; h=0.0001;tiempo=(10/h);p_pp=0;tita_pp=0; t=0:h:tiem po*h; omega=0:h:tiempo*h; alfa=0:h:tiempo*h; p=0:h:tiempo *h; p_p=0:h:tiempo*h; u=linspace(0,0,tiempo+1); %Condiciones iniciales alfa(1)=.1; color= 'r' ; % alfa(1)=.5; color='g'; % alfa(1)=.9; color='b'; omega(1)=0; p_p(1)=0; u(1)=0; p(1)=0; i=1;indice=0; %Versión linealizada en el equilibrio inestable. So ntag Pp 104. % estado=[p(i); p_p(i); alfa(i); omega(i )] Mat_A=[0 1 0 0;0 -Fricc/M -m*g/M 0; 0 0 0 1; 0 Fric c/(long*m) g*(m+M)/(long*M) 0] Mat_B=[0; 1/M; 0; -1/(long*M)] Mat_M=[Mat_B Mat_A*Mat_B Mat_A^2*Mat_B Mat_A^3*Mat_ B ]; %Matriz Controlabilidad rank(Mat_M) %Cálculo del controlador por asignación de polos auto_val=eig(Mat_A); c_ai=conv(conv(conv([1 -auto_val(1)],[1 -auto_val(2 )]),[1 -auto_val(3)]),[1 -auto_val(4)]); Mat_W=[c_ai(4) c_ai(3) c_ai(2) 1;c_ai(3) c_ai(2) 1 0;c_ai(2) 1 0 0;1 0 0 0]; Mat_T=Mat_M*Mat_W; A_controlable=inv(Mat_T)*Mat_A*Mat_T %Verificación de que T esté bien %Ubicación de los polos de lazo cerrado en mui: mui(1)=-7;mui(2)=-7; mui(3)=-4 + 0.4i;mui(4)=conj(m ui(3)); alfa_i=conv(conv(conv([1 -mui(3)],[1 -mui(4)]),[1 - mui(2)]),[1 -mui(1)]); K=(alfa_i(2:5)-c_ai(2:5))*inv(Mat_T); while (i<(tiempo+1)) if (indice>=10) %Intervalos de muestreo donde u es cte. indice=0; estado=[p(i); p_p(i); alfa(i); omega(i)]; u(i)=-K*estado; u(i)=max(-10,u(i)); u(i)=min(u(i),10); else if (i>1) u(i)=u(i-1); end end p_pp=(1/(M+m))*(u(i)-m*long*tita_pp*cos(alfa(i) )+m*long*omega(i)^2*sin(alfa(i))-Fricc*p_p(i)); tita_pp=(1/long)*(g*sin(alfa(i))-p_pp*cos(alfa( i))); p_p(i+1)=p_p(i)+h*p_pp; p(i+1)=p(i)+h*p_p(i); omega(i+1)=omega(i)+h*tita_pp; alfa(i+1)=alfa(i)+h*omega(i); i=i+1; indice=indice+1; end figure(1);hold on; subplot(3,2,1);plot(t,omega,color);grid on; title( 'Velocidad angulo' );hold on; subplot(3,2,2);plot(t,alfa,color);grid on;title( 'Ángulo' );hold on; subplot(3,2,3); plot(t,p,color);grid on;title( 'Posicion carro' );hold on; subplot(3,2,4);plot(t,p_p,color);grid on;title( 'Velocidad carro' );hold on; subplot(3,1,3);plot(t,u,color);grid on;title( 'Acción de control' );xlabel( 'Tiempo en Seg.' );hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,color);grid on;xlabel( 'Ángulo' );ylabel( 'Velocidad angular' );hold on; subplot(2,2,2);plot(p,p_p,color);grid on;xlabel( 'Posicion carro' );ylabel( 'Velocidad carro' );hold on;
Tabla 4-2. Algoritmo Pendulo_Didactico_Asignacion_de_Polos_01.m

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 37
0 5 10-2
0
2Velocidad angulo
0 5 10-1
0
1Ángulo
0 5 10-10
0
10Posicion carro
0 5 10-5
0
5Velocidad carro
0 2 4 6 8 10-10
0
10Acción de control
Tiempo en Seg.
-1 0 1-2
-1
0
1
Ángulo
Vel
ocid
ad a
ngul
ar
-10 0 10-5
0
5
Posicion carro
Vel
ocid
ad c
arro
Fig. 4-7. Evolución del péndulo invertido a partir
de tres condiciones iniciales, 0,1 0,5 y 0,9 radianes,
de color rojo, verde y azul respectivamente.
Fig. 4-8. Plano de fase obtenida a partir de tres
condiciones iniciales, 0,1 0,5 y 0,9 radianes, de
color rojo, verde y azul respectivamente.
4.8. Sumario 4.5. Observabilidad………………………………………………………………………………………..30 4.6. Dualidad de los procesos lineales ...................................................................................................... 32 4.7. Control de un sistema con observador................................................................................................. 32 4.7.1. Ejemplo Péndulo invertido................................................................................................................ 35 4.8. Sumario…………………………….................................................................................................... 37 4.9. Bibliografía..........................................................................................................................................37
4.9. Bibliografía [1] Ogata, K.. Modern Control Engineering. 1997. Prentice Hall. Pag 752. [2] Sontag. Mathematical control theory 1998. Pag 104. http://www.math.rutgers.edu/˜sontag/.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 38
5. Estabilidad en el sentido de Lyapunov En general, el sistema se define como
( ) ( ) 0x0x ,t,xfx ==&
con la solución ( ) .xt,x;t 0000 =φ
Definición de equilibrio: Es un punto del espacio de estado, xe, donde el sistema permanece, por lo que su velocidad es nula,
( ) 0.t 0t,xf e ≥∀=
Si φ(t,x0,t0) es la solución de la ecuación diferencial, se tiene que con el equilibrio xe
φ(t,x0,t0)= xe para todo t≥t0≥0.
Los sistemas lineales tienen el origen como único punto de equilibrio si A es no singular. Se definen las esferas S(δ) y S(ε) alrededor del punto de equilibrio, ∀t≥t0 mediante
,xx e0 δ≤− ( ) ,xt,x;t e00 ε≤−φ
respectivamente.
Fig. 5-1. Evolución de las soluciones de un sistema. El sistema será estable en el sentido de Lyapunov si para cada esfera S(ε) existe una esfera S(δ) tal que las trayectorias que empiezan en S(δ) no salen de S(ε) con t→∞. Si δ no depende de t0, el equilibrio es uniformemente estable. Además, si φ→xe, es
φ(t,t0,x)
xe
x0

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 39
asintóticamente estable. El sistema será inestable si para algún ε>0 y cualquier δ>0 siempre existirá un x0 en S(δ) tal que las trayectorias que allí comienzan se salen de S(ε). Funciones definidas positivas
( ) 0x 0xV ≠∀> y además
( ) 0 xsi 0xV == Es creciente en el tiempo si,
( ) ( ) 0tt xVt,xV ≥∀> y además
( ) .tt 0t,0V 0≥∀=
5.1. Teorema de Lyapunov
Sea la función escalar definida positiva V(x) una función de energía (ficticia) que depende de x y de t. Si la derivada temporal de V(x) es definida negativa entonces el punto de equilibrio xe en el origen es uniformemente asintóticamente estable y la función V(x) se denominará función Lyapunov. Es decir, sea el sistema representado por
( )t,xfx =& con el equilibrio en el origen
( ) t 0t,0f ∀= si existe una función escalar V(x,t) con derivadas parciales continuas y cumple con 1-V(x,t) es definida positiva 2- ( )t,xV&− es definida positiva
si V(x,t) →∞ con ∞→x el equilibrio 0 es uniformemente asintóticamente estable.
5.2. Teorema de Krasovskii
Sea el sistema modelado mediante las ecuaciones
(5-1) donde x∈Rn. y f es un vector cuyas n componentes son funciones no lineales. Para éste sistema, se define la matriz Jacobiano
(5-2)
Además, se define la matriz
(5-3)
( ) ( ) ( ),xFxFxF T +=
( ) .
x
f
x
f
x
f
x
f
x...x
f...fxF
n
n
1
n
n
1
1
1
n1
n1
∂∂
∂∂
∂∂
∂∂
=∂
∂∂=L
MOM
L
( ) ( ) ,x0x ,t,xfx 0==&

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 40
se establece una función Lyapunov para éste sistema haciendo
(5-4) debido a que
(5-5) 5.3. Aplicación en sistemas lineales
Sea el sistema modelado mediante las ecuaciones lineales homogéneas
(5-6)
Se elige la función candidata de Lyapunov
(5-7)
siendo P una matriz simétrica y definida positiva, la derivada temporal de V(x) es
(5-8)
donde se requiere que la matriz entre paréntesis sea definida negativa para que la candidata V(x) propuesta sea función de Lyapunov. Por lo tanto debe cumplirse que
(5-9)
donde Q debe ser definida positiva. Para verificar la existencia de P, se hace el estudio sobre
( ) ,IPAPAT −=+ igualando a la matriz identidad. Nótese la relación existente entre la función Lyapunov V(x) y su derivada temporal, las expresiones (5-8) y (5-9) muestran que
(5-10)
5.4. Regulador óptimo lineal en tiempo continuo
Para el caso del diseño de controladores en espacio de estados y siempre que el sistema sea controlable, los polos de lazo cerrado pueden ubicarse en cualquier punto del plano complejo, pero el límite de las respuestas está dado por las acciones de control. La velocidad de respuesta
PAPAQ T +=−
( ) ( ) xPAPAxxV TT ⋅+⋅=&
( ) ,xPxxV T ⋅⋅=
( ) .x0 x,Axx 0==&
( ) ( ) .xQxxPAPAxxPxt
TTTT ⋅⋅−=⋅+⋅=⋅⋅∂∂
( ) ( ) ( ).xfFxfxV T ⋅⋅=&
( ) ( ) ( ),xfxfxV T ⋅=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 41
del proceso y la magnitud de las acciones de control están inversamente relacionadas.
5.4.1. Motivación
Una solución se encuentra proponiendo un funcional de costo que incluya estos elementos y luego realizar su minimización. El uso del criterio de minimización es ampliamente utilizado, incluso en controladores Entrada-Salida para optimizar los parámetros del PID, Fletcher-Powell (1963) propone
(5-11) La solución analítica es posible solamente para controladores de bajo orden. Se puede minimizar a prueba y error numéricamente. Para el diseño en el espacio de estados, se empleará el funcional
(5-12) El funcional propuesto es convexo y continuo de sus argumentos et y ut. El controlador será óptimo en el sentido de éste funcional. 5.5. Formulación del problema
Dado el sistema lineal determinístico en tiempo continuo
(5-13)
se desea encontrar una ley de control ut
(5-14)
que haga evolucionar al proceso desde x(0)≠0 a x(∞)=0 minimizando el funcional de costo
(5-15)
con Q simétrica y semidefinida positiva y R simétrica y definida positiva. Para diseñar el controlador en espacio de estados en el domino del tiempo continuo, se usará el segundo método de Lyapunov, porque no requiere resolver las ecuaciones diferenciales del sistema a controlar. 5.6. Problema de control óptimo cuadrático
Se usará el segundo método de Lyapunov para resolver el problema del control óptimo
( ) ( )∫∞
+=0
TT dtRuuQu,J xxx
⋅=⋅+⋅=
tt
ttt
C
uBA
xy
xx&
tt Ku x⋅−=
( ) ( )∫∞
∆+==0
2t
2tttt dtureu,eJJ
( ) ( )∫∞
+==0
2t
2tttt dtrueu,eJJ

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 42
formulado. Primero se fijan las condiciones de estabilidad y luego se diseña el controlador dentro de ésas condiciones. El método supone que el sistema es controlable. Reemplazando (5-14) en la primer ecuación del sistema (5-13), se tiene
(5-16)
donde se asume que (A-BK) es estable, es decir, tiene todos los autovalores con parte real negativa. Sustituyendo (5-14) en (5-15),
(5-17)
Usando el Teorema de Lyapunov, para que la candidata
(5-18)
sea Función Lyapunov, entonces su derivada temporal deberá ser definida negativa. Derivando en el tiempo a la V(x),
(5-19)
reemplazando la Ec (5-16) en la derivada temporal de x, se tiene que
(5-20)
El primer término está definido en la Ec (5-9). El segundo término, debe ser definido positivo,
(5-21)
que reagrupando, resulta
(5-22)
y todo el paréntesis debe ser definido positivo. Si se compara el argumento de la integral (5-17) con la (5-24) se puede hacer la igualdad
(5-23)
cuya expresión incluye el modelo dinámico del proceso (5-16). Como es el argumento del funcional de costo a minimizar, si se minimiza el argumento de la (5-17) respecto de K, es lo mismo que minimizar al funcional de costo (5-17) respecto de K. Por lo tanto, la derivada temporal de V(x) deberá cumplir con
(5-24)
Igualando las expresiones, se tiene que
(5-25)
Derivando respecto a t, se tiene
( ) ( )xBKAPxPxBKAxxPxPxx TTTTT −+−=+ &&
( ) tt BKA xx ⋅−=&
( ) ( )( ) ( ) .dtRKKQdtRKKQu,J0
TT
0
TT∫∫∞∞
+=+= xxxxxxx
( ) ( ) .xRKKQxxV TT ⋅+⋅−=&
( ) ,xPxxV T ⋅⋅=
( ) ( ) .xRKKQxxPxt
TTT ⋅+⋅−=⋅⋅∂∂
( ) xPxPxxxV TT&&& +=
( ) ( ) ( ) .xPBKPBKxxPAPAxxV TTTTT +−+=&
PBKPBKQRKKQ TTT ++=+
( ) ( ) .xPBKPBKxQxxxV TTTT +−−=&
( ) ( ) .xPBKPBKQxxV TTT ++−=&
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 43
(5-26)
que debe resolverse en P simétrica y definida positiva. Como la condición (5-26) debe cumplirse para todo x∈Rn, se resuelve la igualdad a partir de igualar las matrices de ponderación de la forma cuadrática. Por lo tanto,
(5-27)
corresponde al argumento del funcional de costos a minimizar, y definiendo a la función ξ como
(5-28)
Para hallar K, se minimiza la expresión (5-28) respecto de K, teniendo en cuenta las reglas de derivación matricial e igualando a 0 el resultado verificando que la derivada segunda de (5-28) sea positiva para que el extremo sea un mínimo. Dada una matriz X y dos vectores x, y se verifica
(5-29)
pero la tercera propiedad sólo es válida si X es simétrica. Derivando la (5-28) respecto a K, se tiene
RK2PBPBK
TT ++=∂
ξ∂
y la derivada segunda de (5-28) es
T2
2
R2K
=∂
ξ∂
que es definida positiva, lo que indica que el extremo de la derivada primera es un mínimo. Por lo tanto, igualando a cero la derivada primera y despejando K se tiene que
(5-30)
La ley de control será, entonces,
(5-31)
Reemplazando el valor de K de la (5-30) en la igualdad (5-27) se obtiene el valor mínimo de la función implícita. Así,
( ) ( ) ( ) ,QPBKPAPAPBKRKKQBKAPPBKARKK0 TTTTT +−++−=+−+−+= reemplazando, entonces, K por la Ec. (5-30), se tiene
( ) ( ) ,QPBPBRPAPAPPBBRPBRRPBR0 T1TTT1T1TT1 +−++−= −−−−
( ) ( ) ( ) ( ) ,QPBPBRPAPAPBRPBPBRPB0 T1TT1TTTT1TT +−++−= −−− que operando, se llega a
( ) ( )( ) ( ) ,xRKKQxxBKAPPBKAx TTTT ⋅+⋅−=−+−
( ) ( ).BKAPPBKARKKQ TT −+−++=ξ
( ) ( ) ( ),xX2 =
x
xXx ;x X =
y
yXx ;y X =
x
yXx TT
TT
⋅∂
⋅⋅∂⋅∂
⋅⋅∂⋅∂
⋅⋅∂
.PBRK T1−=
.xPBRu tT1
t ⋅−= −
( ) ( )( ) ,RKKQBKAPPBKA TT +=−+−−

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 44
(5-32)
que es la Ecuación de Riccati reducida. La solución de la Ecuación matricial de Riccati se encuentra numéricamente por cómputo matricial [4], teniendo como dato los valores numéricos de A, B, R y Q. El procedimiento consiste en formar la matriz del Hamiltoniano H como
(5-33)
que es de orden 2n×2n. Luego se calculan los n autovectores vi asociados a los autovalores de H que estén en el semiplano izquierdo. Con éstos autovectores se construye la matriz particionada
(5-34)
de donde se obtiene la matriz P como
(5-35)
que es simétrica y definida positiva. Así concluye el cálculo del controlador óptimo lineal cuadrático. Finalmente, evaluando a J de la Ec. (5-17) con el ut de la Ec. (5-31) se obtiene
(5-36)
donde se ha usado la igualdad (5-10) para resolver la integral. Para determinar el valor en la Ec. (5-36), se considera que los autovalores de (A-BK) tienen parte real negativa, entonces x(t)→0 con t→∞. Por lo tanto la Ec. (5-36) resulta
(5-37)
Dado el caso en que se diseñe al funcional de costos en términos de la salida y, del sistema de Ec. (5-13),
(5-38)
se reemplaza y por la segunda fila de la Ec. (5-13), quedando
(5-39)
y se emplea CTQC en lugar de Q. Para el diseño del controlador óptimo cuadrático, una vez formulado el problema, se debe resolver la Ecuación de Riccati (5-32) con respecto a P verificando que (A-BK) sea estable.
,0QPBPBRPAPA T1T =+−+ −
−−= TAQ
RAH
[ ] nn21,n21
2
1 RPP ,vvvP
P ×∈=
L
112PPP −=
( ) ( ) ( )0T
0T
0
T
0
TT PPP.dtRKKQu,J xxxxxxxxx −−=−=+= ∞∞
∞∞
∫
( ) .Pu,J 0T
0 xxx =
( ) ( )∫∞
+=0
TT dtRuuQu,J yyx
( ) ( )∫∞
+=0
TTT ,dtRuuQCCu,J xxx

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 45
5.7. Ejemplo Péndulo invertido
Para el sistema carro-barra de la Fig. 4-6, diseñar un controlador en el dominio del tiempo continuo sabiendo que las ecuaciones que describen al ángulo y al desplazamiento son,
(5-40)
y que las matrices A y B, (tomadas de Sontag Pag. 91 y 92) del sistema linealizado para ángulo pequeño es
(5-41)
Se pide realizar el cálculo del controlador basado en optimización y generar las trayectorias del sistema mediante simulación para ángulos iniciales de 0,1 0,5 y 0,8 radiantes. Considerar que la fuerza u debe cumplir con la restricción -10≤u≤10. Los resultados de la simulación están en las Fig. 5-2. y Fig. 5-3. , utilizando el código para Matlab Pendulo_Didactico_01.m de la Tabla 5-1. clc;clear all ; m=.1;Fricc=0.1; long=0.6;g=9.8;M=.5; h=0.0001;tiempo=(10/h);p_pp=0;tita_pp=0; t=0:h:tiem po*h; omega=0:h:tiempo*h; alfa=0:h:tiempo*h; p=0:h:tiempo *h; p_p=0:h:tiempo*h; u=linspace(0,0,tiempo+1); %Condiciones iniciales alfa(1)=.1; color= 'r' ; % alfa(1)=.5; color='g'; % alfa(1)=.8; color='b'; omega(1)=0; p_p(1)=0; u(1)=0; p(1)=0; i=1;indice=0; %Versión linealizada en el equilibrio inestable. So ntag Pp 104. % estado=[p(i); p_p(i); alfa(i); omega(i )] Mat_A=[0 1 0 0;0 -Fricc/M -m*g/M 0; 0 0 0 1; 0 Fric c/(long*m) g*(m+M)/(long*M) 0] Mat_B=[0; 1/M; 0; -1/(long*M)] Mat_M=[Mat_B Mat_A*Mat_B Mat_A^2*Mat_B Mat_A^3*Mat_ B ]; %Matriz Controlabilidad rank(Mat_M) %Cálculo del LQR Q=eye(4);R=1; P=.1*eye(4); auto_val=eig(Mat_A); c_ai=conv(conv(conv([1 -auto_val(1)],[1 -auto_val(2 )]),[1 -auto_val(3)]),[1 -auto_val(4)]); Mat_W=[c_ai(4) c_ai(3) c_ai(2) 1;c_ai(3) c_ai(2) 1 0;c_ai(2) 1 0 0;1 0 0 0]; Mat_T=Mat_M*Mat_W; A_controlable=inv(Mat_T)*Mat_A*Mat_T; %Verificación de que T esté bien B_controlable=inv(Mat_T)*Mat_B; %Contrucción del Hamiltoniano para el cálculo del c ontrolador H=[Mat_A -Mat_B*inv(R)*Mat_B'; -Q -Mat_A']; [V,D]=eig(H);MX1X2=[];
( )
=φδ+φ−φ
=δ+φφ−φφ+δ+
0cosgsenl
uFsenmlcosmlmM 2
&&&&
&&&&&&
( )
−
=
+
−−=
lM
10M
10
B ,
0lM
Mmg
lM
F0
1000
0M
mg
M
F0
0010
A

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 46
for (ii=1:8) if D(ii,ii)<0 MX1X2=[MX1X2 V(:,ii)]; end end MX1=MX1X2(1:4,:); MX2=MX1X2(5:8,:); P=real(MX2*inv(MX1)); K=inv(R)*Mat_B'*P; while (i<(tiempo+1)) if (indice>=100) %Intervalos de muestreo donde u es cte. indice=0; estado=[p(i); p_p(i); alfa(i); omega(i)]; u(i)=-K*estado; u(i)=max(-10,u(i)); u(i)=min(u(i),10); else if (i>1) u(i)=u(i-1); end end p_pp=(1/(M+m))*(u(i)-m*long*tita_pp*cos(alfa(i) )+m*long*omega(i)^2*sin(alfa(i))-Fricc*p_p(i)); tita_pp=(1/long)*(g*sin(alfa(i))-p_pp*cos(alfa( i))); p_p(i+1)=p_p(i)+h*p_pp; p(i+1)=p(i)+h*p_p(i); omega(i+1)=omega(i)+h*tita_pp; alfa(i+1)=alfa(i)+h*omega(i); i=i+1; indice=indice+1; end figure(1);hold on; subplot(3,2,1);plot(t,omega,color);grid on; title( 'Velocidad angulo' );hold on; subplot(3,2,2);plot(t,alfa,color);grid on;title( 'Ángulo' );hold on; subplot(3,2,3); plot(t,p,color);grid on;title( 'Posicion carro' );hold on; subplot(3,2,4);plot(t,p_p,color);grid on;title( 'Velocidad carro' );hold on; subplot(3,1,3);plot(t,u,color);grid on;title( 'Acción de control' );xlabel( 'Tiempo en Seg.' );hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,color);grid on;xlabel( 'Ángulo' );ylabel( 'Velocidad angular' );hold on; subplot(2,2,2);plot(p,p_p,color);grid on;xlabel( 'Posicion carro' );ylabel( 'Velocidad carro' );hold on;
Tabla 5-1. Matlab Pendulo_Didactico_01.m.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 47
0 5 10-5
0
5Velocidad angulo
0 5 10-1
0
1Ángulo
0 5 10-5
0
5Posicion carro
0 5 10-10
0
10Velocidad carro
0 2 4 6 8 10-10
0
10Acción de control
Tiempo en Seg.
-1 0 1-5
0
5
Ángulo
Vel
ocid
ad a
ngul
ar
-5 0 5-5
0
5
10
Posicion carro
Vel
ocid
ad c
arro
Fig. 5-2. Evolución del péndulo invertido para el
controlador LQR a partir de tres condiciones
iniciales, 0,1 0,5 y 0,9 radianes, de color rojo, verde y
azul respectivamente.
Fig. 5-3. Plano de fase para el ángulo y la posición.
obtenida a partir de tres condiciones iniciales, 0,1 0,5
y 0,9 radianes, de color rojo, verde y azul
respectivamente.
6. Análisis en el espacio de estados en tiempo discreto 6.1. Modelos de tiempo discreto
Se ha considerado que la variable tiempo t puede tomar cualquier valor real positivo y por ello el modelo se denomina de tiempo continuo. Hay casos en que el proceso varía en forma discontinua con el tiempo o también procesos de tiempo continuo que admiten un modelo discretizado en el tiempo. En estos casos los modelos se denominan modelos de tiempo
discreto.
Cuando se hace una modelación en el dominio temporal en tiempo discreto, las funciones temporales continuas pueden expresarse como funciones discretas, donde éstas toman el valor de la función continua en cada instante de tiempo discreto. Si el intervalo de discretización es constante, denominado comúnmente intervalo de
muestreo T o , la función temporal discretizada tomará el valor de la función continua en
(6-1) Por simplicidad de notación los instantes de muestreo kT0 se representan simplemente por el valor de k. Un sistema monovariable de orden n representado en tiempo discreto con entrada u(k) y salida y(k) podrá ser modelado por una ecuación en diferencias de orden n, cuya forma general esta dada por
0,1,2... =k para Tk =t o

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 48
(6-2) A partir de las ecuaciones en diferencias que representan un modelo de tiempo discreto, es posible realizar una modelación en el espacio de estado de tiempo discreto. Conceptualmente, el procedimiento es equivalente al realizado a partir de la ecuación diferencial Ec. (2-1) que condujo, con las distintas generalizaciones, a las ecuaciones vectorial-matricial de estado Ec. (2-10) y (2-11). 6.2. Discretización de la solución de estados en tiempo continuo
Dado el sistema modelado mediante las Ec. (2-10) y (2-11), la solución x(t) toma la forma, ∀t∈[t0,t]
(6-3)
Si la acción de control u(t) es escalonada, lo que asume un retentor de orden cero en el sistema,
(6-4)
entonces la solución general del sistema en el intervalo ∀t∈[kT,(k+1)T] y considerando que u(t) en ése intervalo es constante según se expresa en la Ec. (9-33), se tiene que
(6-5)
Si se muestrea a x(t), se tendrá el valor final del intervalo, que es x((k+1)T),
(6-6)
donde
(6-7)
que es la ecuación equivalente con retentor de orden cero. La ecuación de salida, se convierte en
(6-8)
que no dependen del intervalo de muestreo T.
m).-u(kb +...+ 1)-u(kb + u(k)b =
= n)-y(ka +...+ 1)-y(ka + y(k)
m1o
n1
( ) ( ) ( )[ ]T1k,kT t,kTutu +∈=
( )( ) ( ) ( ) ( ) ( ),kTuTHkTxTGT1kx ⋅+⋅=+
( )
( )
=
=
∫−
−
t
kT
stA
kTtA
.BdseH
eG
( ) ( ) ( ) ( ) ( ).kTuBdsekTxetxt
kT
stAkTtA
+= ∫
−−
( ) ( ) ( ) ( ) ( ) .dssBuetxetxt
t
stA0
ttA
0
0 ∫−− +=
( )( ) ( ) ( ),kTuDkTxCT1ky ⋅+⋅=+

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 49
Nótese que si T tiende a cero, la matriz G(T) tiende a la identidad. Tener en cuenta que
(6-9)
siendo la instrucción en Matlab expm(A*t) la función que implementa el cálculo. De aquí en adelante, se empleará la nomenclatura A y B en lugar de G y H, para no
introducir más variables.
Las ecuaciones de estado de tiempo discreto que modelan un sistema discreto multivariable resultan de la forma
(6-10) Para sistemas invariantes serán
(6-11) En la Fig. 6-1 se representa el diagrama en bloques del modelo de la Ec. (6-10).
Fig. 6-1. Diagrama en bloques de un modelo dado por la Ec. (6-10).
El teorema de muestreo de Shannon asegura que si el intervalo To de discretización entre las muestras de una señal continua es
f 2
1 T
maxo ≤ ,
siendo f max la frecuencia máxima del espectro de la señal no se pierde la información
contenida en las señales continuas. Esto implica que respetando el teorema de Shannon se puede construir un modelo de estado de tiempo discreto que representa fielmente al proceso de tiempo continuo.
Du(k). + Cx(k) = y(k)
Bu(k) + Ax(k) = 1)+x(k
( ) ( ) ( ) ( )( ) ( ) ( ) ( ).kukD + kxkC = y(k)
kukB + kxkA = 1)+x(k
∑∞
==+++++=
0k
kkkk22At
!k
tAtA
!k
1tA
!2
1AtIe LL

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 50
Es importante destacar que si bien las ecuaciones para modelos de estado de tiempo continuo son similares a las de tiempo discreto, las matrices de coeficientes serán distintas. Sin embargo, se puede establecer una equivalencia entre las matrices de ambos modelos. Los diseños de control moderno digital de estado, hacen uso de este último modelo, por ello de ahora en más se trabajará exclusivamente con éste. Las Ec. (6-10) y Ec. (6-11) solo modelan sistemas lineales. Esto es, el estado en x(k+1) se obtiene de una relación lineal entre x(k) y u(k). Para sistemas no lineales el estado en x(k+1) será una función no lineal de x(k) y u(k). En general las ecuaciones de estado que modelan a un sistema no lineal variante tendrán la forma
(6-12) Siendo f, g en general funciones vectoriales no lineales de x(k), u(k), k. En este apunte se tratan solamente sistemas que puedan modelarse en forma precisa o aproximada con las relaciones lineales dadas por las Ec. (6-10) y Ec. (6-11). 6.3. Carácter no único del modelo de estado.
Supóngase una transformación lineal Tx = z
donde xz, son vectores y T una matriz de transformación. Entonces despejando x y reemplazando en la Ec. (6-10) se tiene
(6-13) Definiendo ahora
D(k) = (k)D TC(k) = (k)C
TB(k) = (k)B TTA(k) = (k)A
*1-*
*-1*
y reemplazando en la Ec. (6-13) se tiene:
(k)u(k).D + (k)z(k)C = y(k)
(k)u(k)B + (k)z(k)A = 1)+z(k**
**
Estas dos últimas ecuaciones son una representación de estado para el mismo proceso,
. D(k)u(k) + z(k)TC(k) = y(k)
TB(k)u(k) + z(k) TTA(k) = 1)+z(k
B(k)u(k) + z(k)TA(k) = 1)+z(kT
1-
1-
-1-1
k] u(k), g[x(k), = y(k)
k] u(k), f[x(k), = 1)+x(k

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 51
obtenidas por transformación lineal del modelo anterior con la misma entrada y salida. Puesto que la única restricción para la matriz T es que sea no singular, se pueden obtener infinitos modelos en el espacio de estados para el mismo proceso. 6.4. Solución de la ecuación de estado de tiempo discreto
Con el objeto de hacer un planteo conceptual se analiza la solución de la ecuación de estado de tiempo discreto para un proceso invariante
(6-14) Resolviendo la Ec. (6-11) para los distintos valores de k a partir de k=0 se tiene
u(2). B + u(1) AB + u(0) BA + x(0)A =
u(2) B + A x(2) = x(3)
u(1) B + u(0) AB + x(0)A =
u(1) B + A x(1) = x(2)
u(0) B + A x(0) = x(1)
23
2
Generalizando se tiene para cualquier k
(6-15) La Ec. (6-15) tiene dos partes: el primer sumando representa la contribución al estado inicial y la sumatoria la contribución al estado actual de la secuencia de valores de la entrada. La matriz
(6-16) se denomina Matriz de Transición de Estado y relaciona, en un sistema invariante, el estado final con el inicial para entrada nula. Reemplazando la Ec. (6-15) en la ecuación de salida Ec. (6-11), se obtiene el valor de la salida y(k) en función del estado inicial x(0) y todos los valores de la entrada u(k) desde el instante inicial hasta el valor k
(6-17)
6.5. Relación entre la representación de estado y la matriz o función de transferencia
Aplicando transformada Z a las Ec. (6-11) para condiciones iniciales nulas, se tiene
(6-18)
(6-19)
u(k) B + A x(k) = 1)+x(k
( )
1,2,3... =k
u(j) B A + x(0)A = kx 1-j-k1-k
0=j
k ∑
A = (k) kφ
u(j). B CA + u(k) D + x(0)CA = y(k) 1-j-k1-k
0=j
k ∑
u(z) B + A x(z) = x(z)z
u(z). D + x(z)C = y(z)

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 52
Operando en Ec. (6-18)
u(z) B )A - (zI = x(z) -1 y reemplazando en Ec. (6-19) se obtiene
(6-20) La matriz de transferencia discreta se define como
(6-21) Comparando la Ec. (6-20) con la Ec. (6-21) se encuentra que
(6-22) La Ec. (6-22) permite la trasformación del modelo de estado al modelo representado en matriz de transferencia. Si el sistema es de una entrada y una salida la matriz de transferencia G(z) se transforma en una función de transferencia G(z). Con la Ec. (6-22) la matriz de transferencia se puede escribir también como De esta manera la ecuación característica del modelo del proceso será
(6-23) Por lo tanto los polos del modelo del proceso son los valores característicos o autovalores de la matriz A.
6.5.1. Transformación de función de transferencia a espacio de estado.
Dada una función de transferencia discreta de un sistema monovariable.
(6-24) multiplicando y dividiendo por x(z) e igualando numeradores y denominadores de ambos miembros se tiene el sistema
(6-25)
(6-26) Las ecuaciones en diferencias correspondientes a las Ec. (6-25) y Ec. (6-26), se obtienen transformándolas al dominio temporal,
u(z). D] + B )A - [C(zI = y(z) -1
u(z). G(z) = y(z)
D]. + B )A - [C(zI = G(z) -1
.A) - (zIdet
A) - (zIdet D + B A) - Iadj(z C = G(z)
0. = A) - I(zdet
a+...+ za + za + z
b +...+ zb + zb + zb = u(z)
y(z)
n2-n
21-n
1n
n2-n
21-n
1n
o
]x(z)b +...+ zb + zb + zb[ = y(z) n2-n
21-n
1n
o
. ]x(z)a+...+ za + za + z[ = u(z) n2-n
21-n
1n

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 53
(6-27)
(6-28) Despejando x(k+n) de la Ec. (6-28)
(6-29) se hace la siguiente asignación de variables
(6-30) Reemplazando el sistema Ec. (6-30) en la Ec. (6-27) y en la Ec. (6-29)
(6-31)
(6-32) Luego poniendo el sistema de la Ec. (6-30) en forma matricial y observando la Ec. (6-32) se tiene
(6-33) y para la expresión de la Ec. (6-31)
(6-34) Comparando las Ec. (6-33) y Ec. (6-34) con la Ec. (6-10) es
x(k)b ++ 1)-n+x(kb + n)+x(kb = y(k) n1o L
x(k).a++ 1)-n+x(ka + n)+ x(k= u(k) n1 L
x(k)a -...- 1)-n+x(ka - u(k) = n)+x(k n1
. 1)-n+x(ka-- x(k)a - u(k) = n)+ x(k= 1)+(kx
1)-n+ x(k= (k)x = 1)+(kx
. 2)+ x(k= (k)x = 1)+(kx
1)+ x(k= (k)x = 1)+(kx
x(k)= (k)x
1nn
n1-n
32
21
1
L
M
( ) (k)xb ++ (k)xb + (k)xa-- (k)xa - u(k)b = y(k) 1nn1n11n0 LL
(k).xa -...- (k)xa - u(k) = 1)+(kx 1nn1n
u(k)
1
.
.
0
0
+
(k)x
.
.
(k)x
(k)x
a-.....a-
1......
.......
0...100
0...010
=
1)+(kx
.
.
1)+(kx
1)+(kx
n
2
1
1nn
2
1
[ ] [ ] ( ).kub
(k)x
(k)x
(k)x
bab bab bab= y(k) 0
n
2
1
01101n1-n0nn ⋅+
−−− −M
K

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 54
1
.
.
0
0
= b
a-..a-
1...
....
0100
0010
=A
1n K
K
K
K
K
,
.
bab
bab
bab
C
011
01n1-n
0nn
−
−−
= −
M , D=[b0].
El modelo de estado representado por las matrices A, b, cT, d se denomina forma canónica
controlable.
Debido al carácter no único del juego de variables de estado, aplicando transformaciones lineales del tipo vistas en el apartado 6.3, se obtienen otras formas canónicas en las cuales los autovalores de la matriz de coeficientes serán iguales a los del modelo anterior pues los polos asociados al proceso son invariantes cualquiera que sea el modelo matemático con el cual se lo representa. Así pueden obtenerse estas formas estructuradas especialmente denominadas formas canónicas.
6.5.2. Forma canónica observable
Para el sistema definido por la Ec. (6-24) y representado por las Ecs. (6-33) y (6-34) se representan las matrices A, B, C y D por
(6-35)
(6-36)
6.5.3. Forma canónica diagonal.
Considerando la factorización de la Ec. (6-24), asumiendo raíces distintas,
bab
.
bab
bab
= B ,
a-000
....
.010
a-001
a-000
=A
011
01n1-n
0nn
1
1-n
n
−
−
−
−
M
K
K
K
K
K
[ ].bD ,
1
0
0
= C 0T =
M

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 55
(6-37) entonces la forma canónica diagonal de la representación en espacio de estados del sistema está dado por
(6-38)
(6-39)
6.5.4. Forma canónica de Jordan.
Forma que toma la representación en espacio de estados del sistema Ec. (6-24) cuando tiene polos múltiples. Suponiendo que se repite tres veces el polo p1, la Ec. (6-24) toma la forma
(6-40) y las matrices A, B, C y D se convierten en
(6-41)
(6-42)
( )( ) n
n
2
2
1
10 pz
c
pz
c
pz
cb
zU
zY
+++
++
++= L
1
.
.
1
1
= B ,
p-...000
.......
0...p-00
0...0p-0
0...00p-
=A
n
3
2
1
[ ].bD ],c ... c c[ = C 0n21 =
( )( ) ( ) ( ) n
n
4
4
1
32
1
23
1
10 pz
c
pz
c
pz
c
pz
c
pz
cb
sU
sY
+++
++
++
++
++= L
1
1
1
0
= B ,
p-0...000
p-
00...p-00
1p-0
00...01p-
=A
n
4
1
1
1
M
M
MMMM
MM
[ ].bD ],c ... c c[ = C 0n21 =

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 56
Ejemplo: Modelo discreto de un proceso continuo, transformación de función de
transferencia a modelo de estado Para realizar el control digital de un proceso continuo, se desea obtener el modelo de estado discreto del mismo. Como paso intermedio se obtiene el modelo discreto en el dominio Z. Al estar el proceso en un entorno discreto, las señales de entrada y salida deben ser de naturaleza discreta tal que puedan ser generadas o interpretadas por un computador. Para que el proceso opere normalmente, la señal de entrada discreta u(z) debe ser convertida en una señal de tipo quasi-continua, utilizándose en este caso un retenedor de orden cero. El conjunto proceso-retenedor, incluyendo los muestreadores se representa en la Fig. 6-2.
Fig. 6-2. Proceso continuo en un entorno discreto
La función de transferencia del conjunto proceso-retenedor es La transformada Ζ de la parte continua se realiza descomponiendo la función en fracciones parciales y utilizando una tabla de transformadas Ζ Tomando a = eT 0 , la función de transferencia discreta del conjunto proceso-retenedor resulta
( ) . 1) + (ss
1 z - 1 =
1) + (s s
1
sz - 1 = G(s)
21-
-1
. ze-1
1 +
z-1
1 -
)z-(1
zT =
= 1+s
1 +
s
1 -
s
1 =
1)+(ss
1
1-T1-1- 2
1-0
22
0
Ζ
Ζ
Ζ
Ζ
)az - )(1z - (1za) - aT - (1 + z1)- a + T( =
= az-1z-1
+ 1 - z-1zT = G(z)
1-1-
2-0
1-0
1-
-1
1-
-10

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 57
suponiendo que es seg 1 = T0 , se obtiene el modelo para exponente negativo de la variable z expresado en términos de potencias positivas es Para obtener el modelo de estado se utiliza el procedimiento definido como transformación
de función de transferencia a espacio de estado. Introduciendo la función auxiliar x(z), la función de transferencia G(z) puede representarse como un sistema de dos ecuaciones en variable discreta z. la ecuación que involucra a y(z) representa la relación dinámica de la salida del sistema en relación a x(z), mientras que aquella que incluye a u(z), contempla la relación dinámica de la entrada del sistema en relación a x(z). Estas ecuaciones pueden transformarse al dominio temporal obteniéndose las ecuaciones en diferencias que representan al sistema se hace la siguiente asignación de variables reemplazando la asignación de variables en las ecuaciones de entrada y salida se obtiene Este sistema de ecuaciones puede representarse matricialmente para la entrada como
(6-43) y para la salida
)z 0,368 - )(1z - (1z 0,264 + z 0,368
= )zG(1-1-
-2-11-
. a + za + z
b + zb = 0,368) - 1)(z - (z
0,264 + z 0,368 =
u(z)
y(z) = G(z)
212
21
x(z))a + za + z( = u(z)
x(z))b + zb( = y(z)
212
21
x(k)a + 1)+x(ka + 2)+ x(k= u(k)
x(k)b + 1)+x(kb = y(k)
21
21
x(k)a - 1)+x(ka - u(k) = 2)+ x(k= 1)+(kx
1)+ x(k= (k)x = 1)+(kx
x(k)= (k)x
212
21
1
. (k)xb + (k)xb = y(k)
(k)xa - (k)xa - u(k) = 1)+(kx
(k)x = 1)+(kx
1221
12212
21
u(k) 1
0 +
(k)x
(k)x
a-a-
10 =
1)+(kx
1)+(kx
2
1
12
2
1
[ ] . (k)x
(k)x bb = y(k)
2
1
12

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 58
(6-44) Las Ec. (6-43) y Ec. (6-44) modelan el sistema en el espacio de estado. En forma compacta resulta
(6-45) siendo x(k) el vector de estado, A la matriz del sistema y c b, los vectores de entrada y salida respectivamente. Estos se definen como Las formas de las matrices del modelo de estado pertenecen al tipo canónica controlable. 6.6. Análisis de estabilidad
Para hacer un análisis simplificado de la estabilidad de un sistema invariante modelado en el espacio de estado, se supone sin perder generalidad la entrada 0 = u(k) . Bajo esta condición, el estado final x(k) está relacionado al estado inicial x(0) , según la Ec. (6-15) por
x(0)A = x(k) k . Dado que la salida del sistema es según la Ec. (6-11) para entrada nula,
x(k)C = y(k) siendo C invariante, es posible hacer el análisis de estabilidad directamente sobre la evolución del vector de estado x(k) . Un sistema lineal invariante será estable si, teniendo una acción de entrada nula 0=u(k) y partiendo de un estado inicial cualquiera del espacio de estado distinto de cero x(0) , evoluciona hacia un estado 0 =x(k) . A partir de la Ec. (6-15) se concluye que siendo para entrada nula el sistema estable, la matriz de transición Ak debe ser tal que evolucionando k, conduzca el sistema al estado
0. = x(k) Con el objeto de hacer un análisis conceptual simplificado de la estabilidad, se supone un sistema con polos reales y distintos. En este caso y en virtud del carácter no único del modelo
x(k)c = y(k)
u(k) b + A x(k) = 1)+x(kT
[ ] . bb = c1
0 = b
a-a-
10 =A
(k)x
(k)x = x(k)
12T
122
1

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 59
de estado (apartado 6.3), si A no tiene autovalores múltiples, siempre es posible transformar el modelo de estado tal que la matriz A del sistema tome la forma diagonal. Siendo A diagonal, la Ec. (6-15) para entrada nula puede escribirse en forma explícita como
(0)x
.
.
(0)x
(0)x
z00
...
...
0z0
00z
=
(k)x
.
.
(k)x
(k)x
n
2
1
kn
k2
k1
n
2
1
K
K
K
K
K
Los elementos de la diagonal de la matriz A son por definición los autovalores de la misma. De la ecuación característica del sistema Ec. (6-23) los valores zi son los polos del sistema. Por lo tanto para que el vector x(k) tienda a cero, los valores de z deben ser menores que uno. Esto implica que todos los polos del sistema deben estar ubicados dentro del círculo unitario en el plano Ζ . Este concepto puede extenderse también para sistemas cuya matriz A tenga autovalores múltiples, aunque su análisis resulta más complicado. 6.7. Controlabilidad
Un sistema definido por las ecuaciones de estado Ec. (6-10) se dice que es completamente
controlable, si existe una secuencia realizable de control u(k) que pueda transferir el estado del sistema desde un valor inicial x(0) hasta un estado final x(N) en un número finito de pasos N. Por razones de simplicidad algebraica se hace el análisis de controlabilidad para un sistema monovariable, los resultados obtenidos son fácilmente extensibles a un sistema multivariable. Para el sistema monovariable la Ec. (6-15) toma la forma para N=k se tiene
(6-46) donde uN es el vector cuyos componentes representan la secuencia de entrada
(6-47) Si el orden del sistema es m , esto es la dimensión de A es mx m , de las Ec. (6-46) y (6-47) se puede determinar de manera única la entrada para m = N ya que se obtiene un sistema de m ecuaciones con m incógnitas,
u(j). b A + x(0)A = x(k) 1-j-k1-k
0=j
k ∑
ub]A Ab [b + x(0)A = x(N) N1-NN K
u(0)]. 2)-u(N 1)-[u(N = uTN K

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 60
(6-48) La matriz
(6-49) se denomina matriz de controlabilidad. Para que um pueda ser determinado, esta matriz no debe tener columnas o filas linealmente dependientes. Para que el sistema sea controlable se debe cumplir entonces
(6-50) Para m < N no existe una solución para uN . Si m > N existen soluciones no únicas. Para procesos multivariables se hacen los mismos razonamientos y la matriz de controlabilidad queda definida por
(6-51) 6.8. Observabilidad
Un sistema lineal con salida y(k) se denomina observable si cualquier estado x(k) del mismo, puede ser determinado a partir de un número finito de valores de la salida y(k). Se hace aquí un análisis del concepto de observabilidad para un sistema monovariable. Las ecuaciones que modelan el sistema en el espacio de estado son:
(6-52) A partir de las Ec. (6-52), se obtiene el siguiente sistema de ecuaciones en diferencias
(6-53) donde
(6-54) Si se conocen todas las componentes del vector uN , para determinar en forma unívoca las componentes del vector x(k) de orden m , se requieren m ecuaciones. Esto implica que debe ser m = N y el sistema de Ec. (6-53) toma la forma:
x(0)].A - [x(m)]b A Ab [b = u m-11-mm K
b]A Ab [b = Q 1-mc K
. B]A AB [B = Q 1-mc K
. x(k)c = y(k)
u(k) b + A x(k) = 1)+x(kT
u b]Ac Abc bc [0+x(k)Ac=1)-N+y(k
1)bu(kc+Abu(k)c+x(k)Ac = 2)+y(k
bu(k)c+Ax(k)c = 1)y(k
x(k)c=y(k)
N2-NTTT1-NT
TT2T
TT
T
K
M
++
u(k)]. 1)+u(k 1)-N+[u(k = uTN K
m. =Q Rango c

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 61
(6-55) con El vector de estado observado se puede calcular como:
(6-56) Esto supone que
0. Qdet o ≠
Por lo tanto, el sistema es observable si la matriz de observabilidad Qo cumple con la
condición m = Q Rango o ,
o bien que Qo no tenga filas linealmente dependientes.
Este planteo puede extenderse para sistemas multivariables conduciendo a la siguiente matriz de observabilidad.
(6-57)
7. Diseño mediante asignación de polos en tiempo discreto El diseño de controladores mediante asignación de polos es directa, como puede verse en la Literatura (Ogata, Pag 402). Se define a una matriz de trasformación
(7-1)
donde M es la matriz de controlabilidad definida como
(7-2)
u S + x(k)Q = y mom
[ ][ ]
[ ]T1mTTTo
Tm
Tm
AcAcc =Q
u(k)1)+u(k1)-m+u(k u
1-m+y(k1)+y(ky(k) = y
−
=
L
L
L
.
bAcAbcbc0
....
....
bc...
0000
= S
2-mTTT
T
K
K
K
K
K
[ ].u S - y Q = x(k) mm-1o
].CA CA [C = Q 1-mo K
MWT =
[ ]BA|AB|BM 1n−= L

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 62
y la matriz W definida como
(7-3)
donde los coeficientes ai son los que aparecen en el polinomio característico
(7-4)
Se define el nuevo vector de estado x como
(7-5)
Si la inversa de T existe, lo que está sujeto a que el sistema sea controlable, se puede reemplazar el estado x por el nuevo estado en las ecuaciones del sistema
(7-6)
donde las matrices de estados y de entrada tendrán la forma canónica controlable
(7-7)
(7-8)
A su vez, la acción de control se transforma en
(7-9)
siendo el controlador
(7-10)
Este controlador se reemplaza en el modelo (7-6), obteniendo
(7-11)
=−−
−−
0001
01a
01aa
1aaa
1
3n2n
12n1n
L
ML
MMOMM
L
L
W
0azazazz n1n1n
1n =++++=− −
−LAI
.ˆ Txx =
( ) ( ) ( )kkˆ1kˆ uBTxATTx 11 ⋅+⋅=+ −−
,
a-a-a-a-
1000
0100
0010
=
12-n1-nn
K
O
MKMMM
K
K
ATT1-
( ) ( )kˆku xKT−=
( ) ( ) ( ).kˆ1kˆ xKTBTATTx 11 ⋅−=+ −−
[ ].11nn δδδ= − LKT
.
1
.
0
0
0
=
BT1-
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 63
La ecuación característica de éste sistema es la misma que la del sistema sin transformar. Por lo tanto, seleccionando un conjunto de autovalores µ1, µ2, µ3,..., µn, la ecuación característica de lazo cerrado se convierte en
(7-12)
que debe ser igual a la del sistema
(7-13)
Así, reemplazando los valores obtenidos por las Ec (7-7), (7-9) y (7-10), se tiene que
(7-14)
y operando para calcular la ecuación característica en términos de los coeficientes de diseño,
(7-15)
y resolviendo el determinante se llega a
(7-16)
que si se iguala a la Ecuación característica definida en la Ec. (7-12), se concluye que pueden despejar los valores δ para construir el controlador de la Ec. (7-10), que resulta
(7-17)
de donde puede despejarse K
(7-18)
El diseño del controlador comienza ubicando a los polos µi, que son los polos de lazo cerrado. Luego, mediante la Ec. (7-12) se obtienen los coeficientes αi, y resolviendo la Ec. (7-18) se obtiene el controlador K. Un caso particular, es asignar todos los polos de lazo cerrado en el plano Z al origen en la (7-16), lo que resulta en
(7-19)
( )( ) ( ) 0zzzzzz n1n1n
1n
n21 =α+α++α+=µ−µ−µ− −−
LL
( ) .0zI =⋅−− −−KTBTATT
11
[ ] 0
1
.
0
0
0
a-a-a-a-
1000
0100
0010
z 11nn
12-n1-nn
=δδδ
+
− − L
K
O
MKMMM
K
K
I
0
azaa
1000
01-z0
001-z
111n1-nnn
=
δ++δ+δ+
−
− K
O
MKMMM
K
K
( ) ( ) ( ) 0azazaz nn1n1n1n
11n =δ++δ+++δ++ −−
−L
[ ]111n1nnn aaa −α−α−α= −− LKT
[ ] .aaa 1111n1nnn
−−− −α−α−α= TK L
[ ] .aaa 111nn
−− −−−= TK L

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 64
y será el controlador que presentará la dinámica más rápida en lazo cerrado. El estado estará en su valor final en n pasos, siendo n el orden del sistema. Nótese que éste método tiene como ventaja de que es un método simple y directo. No obstante, al igual que en el caso en tiempo continuo, no se tiene en cuenta el efecto conjunto de los polos en el comportamiento del sistema, ni tampoco la magnitud de las acciones de control. El método requiere de iteraciones prueba y error hasta encontrar la respuesta adecuada. Trabajo práctico: implementar un controlador digital con un período de muestreo T=0,0001 segundos por ubicación de polos en el péndulo invertido del modelo dictado en los temas de tiempo continuo. Luego cambiar el período de muestreo a T=0,001 y 0,01 seg. Se sugiere usar el código de la Tabla 7-1. clc;clear all ; m=.1;Fricc=0.1; long=0.6;g=9.8;M=.5; TamanioFuente=12; %Condiciones iniciales alfa(1)=.1; color= '.r' ;colorc= 'r' ; alfa(1)=.5; color= '.g' ;colorc= 'g' ; alfa(1)=.8; color= '.b' ;colorc= 'b' ; %Versión linealizada en el equilibrio inestable. So ntag Pp 104. % estado=[p(i); p_p(i); alfa(i); omega(i )] Mat_Ac=[0 1 0 0;0 -Fricc/M -m*g/M 0; 0 0 0 1; 0 Fri cc/(long*m) g*(m+M)/(long*M) 0]; Mat_Bc=[0; 1/M; 0; -1/(long*M)]; I=eye(4); sys_c=ss(Mat_Ac,Mat_Bc,[0 0 1 0],[0]);Ts=0.01; sys_d=c2d(sys_c,Ts, 'zoh' ); Mat_A=sys_d.a; Mat_B=sys_d.b; Mat_M=[Mat_B Mat_A*Mat_B Mat_A^2*Mat_B Mat_A^3*Mat_ B ]; %Matriz Controlabilidad rango=rank(Mat_M); %Cálculo del controlador por asignación de polos auto_val=eig(Mat_A); c_ai=conv(conv(conv([1 -auto_val(1)],[1 -auto_val(2 )]),[1 -auto_val(3)]),[1 -auto_val(4)]); Mat_W=[c_ai(4) c_ai(3) c_ai(2) 1;c_ai(3) c_ai(2) 1 0;c_ai(2) 1 0 0;1 0 0 0]; Mat_T=Mat_M*Mat_W; A_controlable=inv(Mat_T)*Mat_A*Mat_T %Verificación de que T esté bien %Cálculo del LQR en Tiempo discreto Q=1e2*eye(4);R=1; %Ubicación de los polos de lazo cerrado en mui: mui(1)=0.67700864396509; %Via DLQR mui(1)=0.067700864396509; %Para cambiar por asignación de polos mui(2)=0.97486329908774 + 0.01334551182730*j; %Via DLQR mui(2)=0.972486329908774; %Para cambiar por asignación de polos mui(3)= conj(mui(2)); mui(4)=0.99003151170781; %Via DLQR mui(4)=0.9679003151170781; %Para cambiar por asignación de polos alfa_i=conv(conv(conv([1 -mui(3)],[1 -mui(4)]),[1 - mui(2)]),[1 -mui(1)]); K=fliplr(alfa_i(2:5)-c_ai(2:5))*inv(Mat_T); t=0; x=[0;0;alfa(1);0]; p(1)=x(1); p_p(1)=x(2); alfa(1)=x(3); omega(1)=x(4) ; %Contrucción del Hamiltoniano para el cálculo del c ontrolador H=inv([eye(4) Mat_B*inv(R)*Mat_B'; zeros(4) Mat_A'] )*[Mat_A zeros(4);-Q eye(4)] [V,D]=eig(H);MX1X2=[]; for ii=1:8 if abs(D(ii,ii))<1 MX1X2=[MX1X2 V(:,ii)];

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 65
end end MX1=MX1X2(1:4,:); MX2=MX1X2(5:8,:); P=real(MX2*inv(MX1)); % [K1,P,E]=dlqr(Mat_A,Mat_B,Q,R); K=inv(R+Mat_B'*P*Mat_B)*Mat_B'*P*Mat_A; Jmin=x'*P*x;J=0; for ki=1:500 t=[t ki]; u(ki)=-K*x; J=[J J(ki)+x'*Q*x+u(ki)'*R*u(ki)]; x=Mat_A*x+Mat_B*u(ki); p(ki+1)=x(1); p_p(ki+1)=x(2); alfa(ki+1)=x(3); omega(ki+1)=x(4); end u(ki+1)=-K*x;t=t*Ts; figure(1);hold on; subplot(3,2,1);plot(t,omega,color);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,alfa,color);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,color);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,color);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,color);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,color);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);plot(p,p_p,color);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,3);plot(t,J,color);grid on;title( 'Modelo lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo' , 'FontSize' ,TamanioFuente);hold on; plot(t,Jmin*ones(size(J)),color); %Verificación de la solución con el modelo no linea l en tiempo continuo. T=t(ki+1); x=[0;0;alfa(1);0]; p=x(1); p_p=x(2); alfa=x(3); omega=x(4); tita_pp(1) =0;h=Ts/20; u=[];i=1;Jn=0; for ki=1:500 u1(ki)=-K*x; for kii=1:20 u(i)=u1(ki); p_pp=(1/(M+m))*(u(i)-m*long*tita_pp*cos(alf a(i))+m*long*omega(i)^2*sin(alfa(i))-Fricc*p_p(i)); tita_pp=(1/long)*(g*sin(alfa(i))-p_pp*cos(a lfa(i))); p_p(i+1)=p_p(i)+h*p_pp; p(i+1)=p(i)+h*p_p(i); omega(i+1)=omega(i)+h*tita_pp; alfa(i+1)=alfa(i)+h*omega(i); x=[p(i); p_p(i); alfa(i); omega(i)]; Jn=[Jn Jn(i)+x'*Q*x+u(i)'*R*u(i)]; i=i+1; end end u(i)=-K*x;t=0:h:T; figure(1);hold on; subplot(3,2,1);plot(t,omega,colorc);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,alfa,colorc);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,colorc);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,colorc);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,colorc);grid on;title( 'Acción de
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 66
control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,colorc);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);plot(p,p_p,colorc);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,4);semilogy(t,Jn,colorc);grid on;title( 'Modelo no lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo real' , 'FontSize' ,TamanioFuente);hold on; semilogy(t,Jmin*ones(size(Jn)),colorc);
Tabla 7-1. Matlab Pendulo_Didactico_Asignacion_de_polos_DLQR_D_01.m.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 67
8. Estabilidad en tiempo discreto El análisis de estabilidad en el sentido de Lyapunov sirve para sistemas lineales o no lineales de tiempo discreto, variantes o invariantes en el tiempo. Se basa en el segundo método de Lyapunov. Teorema Sea el sistema en tiempo discreto
(8-1)
donde x∈Rn, f(x) ∈Rn, f(0)=0, y T período de muestreo. Se emplea una función que contempla la energía del sistema, y de ésta función se calcula la diferencia temporal, es decir, que dada
(8-2)
y la función diferencia para dos intervalos de muestreo se define como
(8-3)
Si existe una función escalar continua V(x) tal que
1. V(x)>0 ∀x≠0, 2. ∆V(x)<0 ∀x≠0, ∆V(x)=V(f(xkT))-V(xkT), 3. V(0)=0, 4. V(x)→∞ con ||x||→∞,
entonces el estado de equilibrio x=0 es asintótica-globalmente estable y V(x) es una función de Lyapunov.
Nótese que 2 puede ser reemplazado por ∆V(x)≤0 ∀x, y ∆V(x) no se hace cero para toda secuencia {xkT} solución de (8-1). Suponiendo que en el sistema de la Ec. (8-10) se hace uk=0, se propone la siguiente función candidata de Lyapunov
(8-4)
donde P es simétrica y definida positiva. Entonces, se calcula
( ) ( ) ( ).xVAxVxV Kkk −=∆ Reemplazando la (8-4) se tiene,
( ) ( ) kTkk
Tkk PxxPAxAxxV −=∆ ,
(8-5)
( ) candidata funcionxV kT =
( ) ( )( ) ( ).xVxVxV kTT1kkT −=∆ +
( ) ( ),xfx kTT1k =+
( ) kTkk PxxxV =
( ) ( ) .xPPAAxxV kTT
kk −=∆

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 68
Para asegurar estabilidad asintótica, se impone que la (8-5) sea definida negativa, y se puede escribir que
(8-6)
donde Q es definida positiva, da la condición suficiente para estabilidad asintótica
(8-7)
Es conveniente especificar Q simétrica y definida positiva, y luego verificar que P -determinada por la (8-7)- es definida positiva o no. Si P es definida positiva, entonces la V(x) propuesta por (8-4) es función de Lyapunov y se demuestra estabilidad. Por otro lado, nótese que de la Ec. (8-4), se calcula su diferencia temporal como
( ) ( ) ( )k1kk xVxVxV −=∆ + de donde resulta que
(8-8)
y a su vez se iguala al lado derecho de la Ec. (8-6), y da
(8-9)
8.1. Aplicación del Teorema: Regulador óptimo lineal en tiempo discreto
El concepto de estabilidad según el método de Liapunov es útil para el cálculo de controladores. Aquí se verá su uso en el controlador óptimo según un funcional cuadrático. En el modelo del proceso no se consideran restricciones en sus variables. Para emplear el Teorema, se requiere disponer del problema formulado con características consistentes, por los que se procede con la presentación formal de los elementos que intervienen. La función Candidata de Liapunov se iguala con el funcional de costos, ya que éste cumple con los requisitos de la primera.
8.1.1. Formulación del problema
La formulación del problema de control para el Regulador Óptimo lineal en tiempo discreto es la siguiente. Dado el sistema lineal determinístico
(8-10)
se desea encontrar una ley de control uk que haga evolucionar al proceso desde x(0)≠0 a x(N)=0 minimizando el siguiente funcional de costo
(8-11)
( ) [ ] NTNk
Tkk
Tk
1-N
0=k
SRuu+Qu,xJ xxxx += ∑
+=+=+
kkkkk
kkkk1k
uDC
uBA
xy
xx
( ) ,QxxxV kTkk −=∆
.PPAAQ T −=−
( ) kTk1k
T1kk PxxPxxxV −=∆ ++
.PxxPxxQxx kTk1k
T1kk
Tk −=− ++

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 69
con S y Q simétricas y semidefinidas positivas y R simétrica y definida positiva. Para encontrar la ley de control uk, existen diversos métodos, entre los más difundidos están los basados en el principio de optimalidad de Bellman y los que emplean los multiplicadores de Lagrange. Para el caso en que N tienda a infinito en la definición del funcional (8-11), se tiene una formulación del problema conocida como de estado estacionario donde pierde sentido el término xT
NSxN ya que al ser estable el sistema controlado siempre será nulo, la cual admite un procedimiento de cómputo basado en la Teoría de Lyapunov. 8.2. Formulación del problema de estado estacionario
Se propone formular el problema de control óptimo para emplear la Teoría de Lyapunov, que considera un sistema dinámico en estado estacionario. Dado el modelo dinámico de la Ec. (8-10), se desea encontrar una ley de control uk
(8-12)
que haga evolucionar el sistema para k=0 hasta k=∞, minimizando el funcional de costos
(8-13)
donde Q es simétrica y semidefinida positiva, y R es simétrica y definida positiva. Para resolver éste problema, se empleará el Teorema de estabilidad de Lyapunov.
8.2.1. Problema de control óptimo discreto estacionario
Reemplazando la ley de control (8-12) en la expresión del funcional de costos (8-13), se puede escribir que
(8-14)
Ahora se busca la solución al problema de control en tiempo discreto en estado estacionario, que se basa en la Ec. (8-9), pero si la acción de control no es nula, aparece la modificación de incorporar al controlador. Así, para el caso en que uk≠0 en la entrada al sistema (8-10), se reemplaza en las ecuaciones del sistema la expresión de la ley de control (8-12), y se tiene que la Ec. (8-9) se transforma en
(8-15)
si se hace coincidir a la matriz Q Ec. (8-9) con el argumento de ponderación de la forma cuadrática de la Ec. (8-14). De aquí que minimizando la (8-14) con respecto a K, se encuentra la ley de control óptima (8-12). Para ello, se opera en la igualdad (8-15) que puede escribirse como
( ) .Ruu+Qu,J kTkk
Tk
0=k
xxx ∑∞
=
kk Ku x⋅−=
( ) .PxxPxxxRKKQx kTk1k
T1kk
TTk −=+− ++
( ) ( ) .RKKQu,J kTT
k0=k
xxx += ∑∞
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 70
(8-16)
Ésta última igualdad debe cumplirse para todo valor de xk, por lo tanto, se tiene que minimizando
(8-17)
con respecto a K es lo mismo que hacerlo en la (8-14). Para ello, se define una función ζ a partir de la Ec. (8-17) como,
(8-18)
Se procede minimizando a la Ec. (8-18) respecto a K, derivando miembro a miembro, considerando las reglas (5-29) y que la regla de la cadena en operaciones con matrices es
(8-19)
Para minimizar a la expresión de la Ec. (8-18), se deriva respecto a K, se iguala a cero y se despeja K en el extremo. Para demostrar que es un mínimo, se hace la derivada segunda de la Ec. (8-18) respecto a K, que deberá ser positiva. Entonces, derivando respecto a K a la Ec. (8-18), se tiene
( ) ( )BKAP2BRK2K
T −⋅−+=∂
ς∂.
La derivada segunda será { } ( )TTT
TT
2
2
PBB2R2K
PBKB2PAB2RK2
K+=
∂⋅+⋅−∂=
∂ς∂
cuyo resultado es una matriz definida positiva. Por lo tanto, el extremo en cuestión es un mínimo. Operando para despejar K de la derivada primera,
PBKBPABRK TT −= , es decir
PABPBKBRK TT =+ y de aquí
(8-20)
Reemplazando el valor de K óptimo encontrado en la Ec. (8-17), se llega a la Ecuación de Riccati de estado estacionario. Para ello, se reemplaza entonces la (8-20) en la (8-18). Entonces, operando primero a la Ec. (8-18),
(8-21)
donde el lado derecho y los primeros dos términos del lado izquierdo no dependen de K, pero
( ) ( ) ( )( ) .xPBKAPBKAxxRKKQx kTT
kkTT
k −−−=+−
( ) ( ) .PBKAPBKARKKQ TT −−−++=ς
( ) ( )( ) ( ) ( ) ( )
( ).
F
FXF
x
F=
x
FXF
x
xTxxx
Tx
∂⋅⋅∂
⋅∂
∂∂
⋅⋅∂
( ) .PABPBBRK T1T −+=
( ) ( ) ,PPBKBKPABKPBKARKKPAAQ TTTTT =+−−++
( ) ( ) PBKAPBKARKKQ TT +−−−=+

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 71
sí los términos desde el tercero hasta el sexto. Reemplazando K de la Ec. (8-20) en el tercer término, se tiene
( ) ( ) PABPBBRRPABPBBRRKK T1TT
T1TT −−+
+=
( ) ( ) ( ) .PABPBBRRPBBRPAB T1TT1TTT −−
+
+=
Haciendo lo mismo con el cuarto término,
( ) ( ) PABPBBRPABPBKA T1TTTT −+= .
Con el quinto,
( ) ( ) ( ) ( ) PAPBBRBPABPAPABPBBRBPABKT1TTT
TT1TT
+=
+=
−−
( ) ( ) PAPBBRBPABT1TTT
+=
−
( ) ( ) PABPBBRPAB TT1TTT
+=
−
y con el sexto término, se tiene
( ) ( ) ( ) PABPBBRPBPABPBBRBPBKBK T1TT
T1TT −−+
+=
( ) ( ) ( ) PABPBBRPBBPBBRBPA T1TT
T1TT −−+
+=
( ) ( ) ( ) PABPBBRPBPBBRBPAB T1TT1TTT −−
+
+=
( ) ( ) ( ) .PABPBBRPBBPBBRPAB T1TTT1TTT −−
+
+=
Nótese que todos los términos se expresaron como una forma cuadrática de BTPA, por lo tanto, se puede hacer la suma de los términos y agruparlos reemplazándolos en la Ec. (8-21), entonces operando se tiene,
( ) ( ) ( ) ( ) ( ) +
+−+−+
+++=
−−−− T1T1T1TT1TTTT PBBRBPBBRPBBRRPBBRPABPAAQP
( ) ( ) PABPBBRPBBPBBR T1TTT1T
+
++
−−
, que operando con el primer y cuarto término dentro del paréntesis, para agrupar como forma cuadrática, se tiene
( ) ( )( ) ( ) ( ) T1T1T1TTT1T PBBRPBBRPBBRRPBBPBBR
+−+−++
+
−−−−
, y ahora se puede simplificar ya que las inversas existen
( ) ( ) ( ) ( ) 1TT1T1T
T1T PBBRPBBRPBBRPBBR−−−−
+−=
+−+−
+
,

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 72
que será el término medio de la forma cuadrática en BTPA, finalmente, la Ec. (8-21) queda
(8-22)
que es la Ecuación de Riccati de estado estacionario en tiempo discreto. A su vez, operando se llega a
(8-23)
y también a,
(8-24)
Para el diseño del controlador, debe resolverse la Ecuación de Riccati en P. La solución de la Ecuación matricial de Riccati se encuentra numéricamente [4], teniendo como dato los valores numéricos de A, B, R y Q. El procedimiento consiste en formar la matriz del Hamiltoniano H como
(8-25)
que es de orden 2n×2n. Luego se calculan los n autovectores vi asociados a los autovalores de H que estén dentro del círculo unitario. Con éstos autovectores se construye la matriz particionada
(8-26)
de donde se obtiene la matriz P como
(8-27)
que es simétrica y definida positiva. Así concluye el cálculo del controlador óptimo lineal cuadrático en tiempo discreto de estado estacionario. El funcional de costo se puede evaluar, usando las igualdades de la Ec. (8-14) y la Ec. (8-15), se llega a
(8-28)
8.3. Ejemplo de aplicación
Para el ejemplo propuesto en la Sección 5.7, se pretende realizar el diseño del controlador
( ) ( ) PABPBBRPABPAAQP T1TTTT −+−+=
( ) APBRBIPAQP1T1TT −−++=
( ) .ABRBPAQP1T1T1T −−− ++=
( ) .PxxPxxPxxRuu+Qu,J 0T0k
Tk1k
T1k
0=kk
Tkk
Tk
0=k
=−== ++
∞∞
∑−∑ xxx
−
=
−−
IQ
0A
A0
BBRIH
1
T
T1
[ ] nn21,n21
2
1 RPP ,vvvP
P ×∈=
L
112PPP −=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 73
lineal en tiempo discreto. Para ello, se utiliza la función DLQR de Matlab. Verificar los resultados con las igualdades Jmin=xT
(0)Px(0), y la implementación de la Ec. (8-13). En la Tabla 8-1 está el código que implementa un controlador diseñado en el dominio del tiempo discreto mediante la metodología descripta, donde se han agregado los conceptos de diseño por ubicación de polos y la verificación del controlador con el modelo no lineal. clc;clear all ; m=.1;Fricc=0.1; long=0.6;g=9.8;M=.5; TamanioFuente=12; %Condiciones iniciales alfa(1)=.1; color= '.r' ;colorc= 'r' ; alfa(1)=.5; color= '.g' ;colorc= 'g' ; alfa(1)=.8; color= '.b' ;colorc= 'b' ; %Versión linealizada en el equilibrio inestable. So ntag Pp 104. % estado=[p(i); p_p(i); alfa(i); omega(i )] Mat_Ac=[0 1 0 0;0 -Fricc/M -m*g/M 0; 0 0 0 1; 0 Fri cc/(long*m) g*(m+M)/(long*M) 0]; Mat_Bc=[0; 1/M; 0; -1/(long*M)]; I=eye(4); sys_c=ss(Mat_Ac,Mat_Bc,[0 0 1 0],[0]);Ts=0.01; sys_d=c2d(sys_c,Ts, 'zoh' ); Mat_A=sys_d.a; Mat_B=sys_d.b; Mat_M=[Mat_B Mat_A*Mat_B Mat_A^2*Mat_B Mat_A^3*Mat_ B ]; %Matriz Controlabilidad rango=rank(Mat_M); %Cálculo del controlador por asignación de polos auto_val=eig(Mat_A); c_ai=conv(conv(conv([1 -auto_val(1)],[1 -auto_val(2 )]),[1 -auto_val(3)]),[1 -auto_val(4)]); Mat_W=[c_ai(4) c_ai(3) c_ai(2) 1;c_ai(3) c_ai(2) 1 0;c_ai(2) 1 0 0;1 0 0 0]; Mat_T=Mat_M*Mat_W; A_controlable=inv(Mat_T)*Mat_A*Mat_T %Verificación de que T esté bien %Cálculo del LQR en Tiempo discreto Q=1e2*eye(4);R=1; %Ubicación de los polos de lazo cerrado en mui: mui(1)=0.67700864396509; %Via DLQR mui(1)=0.067700864396509; %Para cambiar mui(2)=0.97486329908774 + 0.01334551182730*j; %Via DLQR mui(2)=0.972486329908774; %Para cambiar mui(3)= conj(mui(2)); mui(4)=0.99003151170781; %Via DLQR mui(4)=0.9679003151170781; %Para cambiar alfa_i=conv(conv(conv([1 -mui(3)],[1 -mui(4)]),[1 - mui(2)]),[1 -mui(1)]); K=fliplr(alfa_i(2:5)-c_ai(2:5))*inv(Mat_T); t=0; x=[0;0;alfa(1);0]; p(1)=x(1); p_p(1)=x(2); alfa(1)=x(3); omega(1)=x(4) ; %Contrucción del Hamiltoniano para el cálculo del c ontrolador H=inv([eye(4) Mat_B*inv(R)*Mat_B'; zeros(4) Mat_A'] )*[Mat_A zeros(4);-Q eye(4)] [V,D]=eig(H);MX1X2=[]; for ii=1:8 if abs(D(ii,ii))<1 MX1X2=[MX1X2 V(:,ii)]; end end MX1=MX1X2(1:4,:); MX2=MX1X2(5:8,:); P=real(MX2*inv(MX1)); % [K1,P,E]=dlqr(Mat_A,Mat_B,Q,R); K=inv(R+Mat_B'*P*Mat_B)*Mat_B'*P*Mat_A; Jmin=x'*P*x;J=0; for ki=1:500 t=[t ki]; u(ki)=-K*x; J=[J J(ki)+x'*Q*x+u(ki)'*R*u(ki)]; x=Mat_A*x+Mat_B*u(ki);

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 74
p(ki+1)=x(1); p_p(ki+1)=x(2); alfa(ki+1)=x(3); omega(ki+1)=x(4); end u(ki+1)=-K*x;t=t*Ts; figure(1);hold on; subplot(3,2,1);plot(t,omega,color);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,alfa,color);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,color);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,color);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,color);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,color);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);plot(p,p_p,color);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,3);plot(t,J,color);grid on;title( 'Modelo lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo' , 'FontSize' ,TamanioFuente);hold on; plot(t,Jmin*ones(size(J)),color); %Verificación de la solución con el modelo no linea l en tiempo continuo. T=t(ki+1); x=[0;0;alfa(1);0]; p=x(1); p_p=x(2); alfa=x(3); omega=x(4); tita_pp(1) =0;h=Ts/20; u=[];i=1;Jn=0; for ki=1:500 u1(ki)=-K*x; for kii=1:20 u(i)=u1(ki); p_pp=(1/(M+m))*(u(i)-m*long*tita_pp*cos(alf a(i))+m*long*omega(i)^2*sin(alfa(i))-Fricc*p_p(i)); tita_pp=(1/long)*(g*sin(alfa(i))-p_pp*cos(a lfa(i))); p_p(i+1)=p_p(i)+h*p_pp; p(i+1)=p(i)+h*p_p(i); omega(i+1)=omega(i)+h*tita_pp; alfa(i+1)=alfa(i)+h*omega(i); x=[p(i); p_p(i); alfa(i); omega(i)]; Jn=[Jn Jn(i)+x'*Q*x+u(i)'*R*u(i)]; i=i+1; end end u(i)=-K*x;t=0:h:T; figure(1);hold on; subplot(3,2,1);plot(t,omega,colorc);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,alfa,colorc);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,colorc);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,colorc);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,colorc);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,colorc);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);plot(p,p_p,colorc);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,4);semilogy(t,Jn,colorc);grid on;title( 'Modelo no lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo real' , 'FontSize' ,TamanioFuente);hold on;

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 75
semilogy(t,Jmin*ones(size(Jn)),colorc);
Tabla 8-1. Matlab Pendulo_Didactico_Asignacion_de_polos_DLQR_D_01.m. Los resultados se muestran en las figuras Fig. 8-1. Fig. 2 y Fig. 8-3. Fig. 4. En la Fig. 8-1. Fig. 2 se muestra la evolución temporal de las variables de estado y de la acción de control. Están superpuestas las correspondientes al modelo lineal y al modelo no lineal, en línea de puntos y continua, respectivamente.
0 1 2 3 4 5-10
-5
0
5Velocidad ángulo
0 1 2 3 4 5-1
-0.5
0
0.5
1Ángulo
0 1 2 3 4 50
0.5
1
1.5Posición carro
0 1 2 3 4 5-5
0
5
10Velocidad carro
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5-50
0
50
100Acción de control
Tiempo en Seg.
Fig. 8-1. Fig. 2. Evolución temporal de las variables del péndulo invertido, la respuesta del modelo
lineal y del no lineal están superpuestas.
En la Fig. 8-3. Fig. 4 se muestra el plano de fase de las variables de estado posición y ángulo, donde se observa la desviación que existe cuando se considera el modelo no lineal. En la misma figura Fig. 8-3. Fig. 4, al pie, están las gráficas de los costos acumulados en el tiempo de evolución, que es grande comparado a la dinámica del sistema debido a la suposición de estado estacionario, mostrado en la Ec. (8-13). Nótese que cuando se considera la acumulación del costo con el modelo no lineal, el error es muy grande, siendo que para el caso lineal el error entre la Ec. (8-13) y la Ec. (8-28) es despreciable.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 76
-1 -0.5 0 0.5 1-8
-6
-4
-2
0
2
Ángulo
Vel
ocid
ad a
ngul
ar
0 0.5 1 1.5-2
0
2
4
6
8
Posición carro
Vel
ocid
ad c
arro
0 1 2 3 4 50
2
4
6
8
10
12x 10
4 Modelo lineal
Tiempo en Seg.
Acu
mul
ació
n de
cos
to
0 1 2 3 4 510
0
102
104
106
108
Modelo no lineal
Tiempo en Seg.
Acu
mul
ació
n de
cos
to
Fig. 8-3. Fig. 4. Plano de fase y evolución de la acumulación del costo en el modelo lineal y en el modelo
no lineal del péndulo invertido.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 77
9. Regulador óptimo lineal en el transitorio Se pretende deducir la expresión del controlador óptimo en el dominio del tiempo para que haga evolucionar a un proceso modelado como un sistema lineal, desde cualquier estado inicial en el instante k=0 hasta el valor 0 en el instante k=N. 9.1. Formulación del problema en el transitorio
El procedimiento que va a implementarse se conoce como minimización de una función sujeto a restricciones, las cuales están impuestas por el modelo dinámico del proceso. El concepto del método es útil para considerar restricciones arbitrarias en la formulación del problema de control óptimo. Las restricciones se agregan al funcional de costo mediante los multiplicadores de Lagrange (ML) λ, que son vectores con la misma dimensión que el vector de estado. Se minimiza J de la Ec (8-11), cuando está sujeta a las restricciones especificadas por la Ec (8-10), para una condición inicial x(0)≠0. Al emplear un conjunto de ML {λ(1), λ(2),.... λ(N)} que forman un vector adjunto o covector, se re define al funcional J(x,u) de la Ec (8-11) como el funcional de costo aumentado Ja(x,u), dado por
(9-1)
donde los ML se escriben así para mantener la dimensión escalar de L. Minimizar (9-1) es equivalente que minimizar (8-11) sujeto a (8-10). Para minimizar Ja(x,u), se busca diferenciar a Ja(x,u) respecto de cada componente dadas como x, u y λλλλ e igualar a 0 las expresiones. Suele ser conveniente trabajar con los conjugados de cada componente, pero aquí se trabajará con las componentes originales ya que sólo se hará tratamiento simbólico. Por lo tanto, se pretende hallar las siguientes igualdades
(9-2)
con k de 1 a N para xk y λk, y de 1 a N-1 para u.
( ) [ ] [ ]{ }N
TN
1kT
1kkk1kkkT
1kkTkk
Tk
1-N
0=ka
Sxx
xBuAxxBuAxRuu+Qxxu,xJ
+
λ−++−+λ+= ++++∑
( ) ( ) ( ) ( ),0
u,xJ,0
u,xJ,0
u,xJ,0
u,xJ
k
a
k
a
N
a
k
a =∂
∂=
∂∂
=∂
∂=
∂∂
λuxx

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 78
Para facilitar el procedimiento, se explicitará al funcional de costo Ja(x,u) de la Ec. (9-1)
(9-3)
Ahora, se visualiza claramente dónde están las funciones de las variables correspondientes para ejecutar el procedimiento de (9-3). Recordar las igualdades de derivación matricial expresadas en la Ecs. (5-29) y (8-19). Se obtiene,
( ) { }kkT
kkk1kT
1kT
kk
a AQx2AAQx2u,xJ λ−λ+=λ−λ−λ+λ+=
∂∂
++x
de donde se deduce
(9-4)
( ) { }NNNNN
N
a Sx2Sx2u,xJ λ−=λ−λ−=
∂∂
x
de donde se obtiene
(9-5)
( ) { }1kk1k1kk
k
a BRu2BBRu2u
u,xJ+++ λ+=λ+λ+=
∂∂
por lo tanto
(9-6)
( ) { }k1kkk1kkk1kk
k
a xBuAx2xBuAxxBuAxu,xJ −+=−++−+=
λ∂∂
−−−
por último
(9-7)
Nótese que la Ec. (9-7) es la ecuación de estados del sistema (8-10). Para verificar que el extremo encontrado sea un mínimo, puede hacerse la derivada segunda de (9-3) respecto a sus variables y se verá que es positiva en los casos de xk, xN, y uk, pero en λk el método no decide.
( ).0Sx0
u,xJNN
N
a =λ−⇒=∂
∂x
( )1.-N 1,2,....,k ,0BRu0
u,xJ1k
Tk
k
a ==λ+⇒=∂
∂+
u
( )N.1,2,...,k ,0xBuAx0
u,xJk1k1k
k
a ==−+⇒=∂
∂−−
λ
( ) [ ] [ ]{[ ] [ ]
[ ] [ ] }.Sxx
xBuAxxBuAxRuu+Qxx
xBuAxxBuAxRuu+Qxx
xBuAxxBuAxRuu+Qxxu,xJ
NTN
NT
N1N1NN1N1NTN1-N
T1-N1-N
T1N
1kT
1kkk1kkkT
1kkTkk
Tk
kT
k1k1kk1k1kTk1-k
T1-k1-k
T1k
1-N
0=ka
+
λ−++−+λ++
λ−++−+λ++
λ−++−+λ++⋅⋅⋅=
−−−−−
++++
−−−−−∑
( )1.-N1,2,....,k ,0AQx0
u,xJk1k
Tk
k
a ==λ−λ+⇒=∂
∂+
x

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 79
Para hallar la expresión del controlador, hay que operar entre las ecuaciones (9-4), (9-5), (9-6) y (9-7) para independizarse de λ. Entonces, despejando λ de (9-4),
(9-8)
tiene como condición final a la Ec. (9-5), es decir
(9-9)
De la expresión (9-6) se despeja uk,
(9-10)
Sustituyendo la expresión de uk de (9-10) en la ecuación de estado del sistema (8-10), se tiene para A y B invariantes
(9-11)
Para resolver el problema de optimización, deben resolverse simultáneamente las expresiones de la Ec. (9-8) y la Ec. (9-11). Las condiciones de borde serán λN y x(0). De la Ec. (9-9), se define
(9-12)
donde la matriz Pk es simétrica y real, y PN=S. Sustituyendo (9-12) en las expresiones (9-8) y (9-11), se tiene
(9-13)
y análogamente para (9-11)
(9-14)
Las expresiones (9-13) y (9-14) se denominan transformaciones de Riccati, por no contener a λ. De la Ec. (9-14) se tiene que
(9-15)
Se demuestra que el paréntesis tiene inversa si P es al menos semidefinida positiva. Por lo tanto
(9-16)
Sustituyendo la Ec. (9-16) en la Ec. (9-13)
(9-17)
1.-N1,2,....,k ,AQx 1kT
kk =λ+=λ +
.Sx NN =λ
1.-N 1,2,....,k ,BRu 1kT1
k =λ−= +−
( ) . ,BBRA 001kT1
k1k xxxx =λ−= +−
+
1-0,1,...Nk ,xP kkk ==λ
1.-N1,2,....,k ,xPAQxxP 1k1kT
kkk =+= ++
( ) . ,xPBBRA 001k1kT1
k1k xxxx =−= ++−
+
( ) ( ) . ,APBBRIx 00k
1
1kT1
1k xxx =+=−
+−
+
( ) 1.-N1,2,....,k ,xAPBBRIPAQxP k1
1kT1
1kT
kk =
++=
−+
−+
( ) ( ) . ,AxPBBRI 00k1k1kT1
xxx ==+ ++−

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 80
Multiplicando ambos miembros de la Ec. (9-17) por xk
T se tiene que
(9-18)
Como la igualdad debe cumplirse para todo x, entonces
(9-19)
que es la Ecuación de Riccati. Sabiendo que PN=S, se resuelve PN-1 y así sucesivamente hasta P0. Despejando λk+1 de a Ec. (9-8) se tiene que
(9-20)
El vector de control óptimo se escribe entonces reemplazando en (9-10) la Ec.(9-20), se obtiene
(9-21)
Reemplazando λk de la Ec. (9-12) en la (9-21), se tiene
(9-22)
de donde se define el controlador Kk como
(9-23)
Evaluando el funcional de costo de la Ec. (8-11) con la uk de la (9-22) se encontrará el Jmin. Para simplificar el procedimiento, multiplicando ambos miembros de (9-13) por xk
T, se tiene
(9-24)
y reemplazando el término xk
TAT por su equivalente de la Ec. (9-15)
(9-25)
y despejando el término en xkTQxk se tiene
( ) 1.-N1,2,....,k ,xAPBBRIPAQxxPx k1
1kT1
1kTT
kkkTk =
++=
−+
−+
( ) 1.-N1,2,....,k ,APBBRIPAQP1
1kT1
1kT
k =++=−
+−
+
( ) ( ) 1.-N 1,2,....,k ,QxABRu kk1TT1
k =−λ−=−−
( ) ( ) 1.-N1,2,....,k ,QxA kk1T
1k =−λ=λ−
+
( ) ( ) 1.-N 1,2,....,k ,xKxQPABRu kkkk1TT1
k =−=−−=−−
( ) ( ) 1.-N 1,2,....,k QPABRK k1TT1
k =−=−−
1.-N1,2,....,k ,xPAxQxxxPx 1k1kTT
kkTkkk
Tk =+= ++
( ) 1.-N1,2,....,k ,xPPBBRIxQxxxPx 1k1kT
1kT1T
1kkTkkk
Tk =++= +++
−+

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 81
(9-26)
En la Ec. (9-10) se reemplaza λk+1 partiendo de la Ec. (9-12) que está valuada en k,
(9-27)
Así, ukTRuk resulta
(9-28)
Sumando las expresiones de la Ec. (9-26) con la Ec. (9-28) se tiene que
(9-29)
y operando se llega a
(9-30)
Sustituyendo la Ec. (9-30) en la Ec. (8-11)
(9-31)
pero como PN=S, se tiene que el Jmin resulta
(9-32)
9.2. Problema de control óptimo lineal de continuo a discreto
Se estudiará el problema de control óptimo que se plantea en el tiempo continuo pero se implementa en tiempo discreto.
9.2.1. Formulación del problema
Dado el sistema modelado mediante las Ecs. (1-14) y (1-15), se desea encontrar la ley de control ut de la forma
(9-33)
que minimice el funcional de costo definido por
1.-N 1,2,....,k ,xPBRu 1k1kT1
k =−= ++−
( ) ( ) 1.-N 1,2,....,k ,xPBRRxPBRRuu 1k1kT1T
1k1kT1
kTk == ++
−++
−
( ) 1.-N1,2,....,k ,xPPBBRIxxPxQxx 1k1kT
1kT1T
1kkkTkk
Tk =+−= +++
−+
( )( ) ( ) 1.-N1,2,....,k ,xPBRRxPBR
xPPBBRIxxPxRuuQxx
1k1kT1T
1k1kT1
1k1kT
1kT1T
1kkkTkk
Tkk
Tk
=
++−=+
++−
++−
+++−
+
1.-N1,2,....,k ,xPxxPxRuuQxx 1k1kT
1kkkTkk
Tkk
Tk =−=+ +++
( ) ( )[ ] NTNNN
TN1N1N
T1N22
T211
T111
T100
T0min SxPxxPxxPxxPxxPxxPxJ xx+−++−+−= −−−L
.xPxJ 00T0min =
( )[ ]T1k,kT t,uu kTt +∈=
( ) ( )∫ ++=f
ff
t
0t
Ttt
Ttt
Tt dtRuuQ
2
1Sxx
2
1u,J xxx

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 82
(9-34)
con Q simétrica y semidefinida positiva y R simétrica y definida positiva. Se supone que el sistema representado por las Ecs. (1-14) y (1-15) puede ser reemplazado por
(9-35)
La solución general del sistema de la Ec. (1-14) ∀t∈[t0,t] es
(9-36)
Si se expresa la solución en el intervalo ∀t∈[kT,(k+1)T] y considerando que us en ése intervalo es constante según se expresa en la Ec. (9-33), se tiene que
(9-37)
Así, la solución xt ∀t∈[kT,(k+1)T] puede expresarse como
(9-38)
donde
(9-39)
Reemplazando la Ec. (9-38) y la Ec. (9-33) en la expresión del funcional de costo J de la Ec. (9-34)
(9-40)
Operando el término entre llaves, considerando que todas las cantidades son escalares, y que u y x son constantes en el intervalo de integración, se llega a la expresión de J de la forma
(9-41)
donde
( )
⋅=
⋅+⋅=+
kTkT
kTTkTTT1k
C
uBA
xy
xx
( ) ( ) .dsBuexext
ts
stAt
ttAt
00
0 ∫−− +=
( ) ( ) .uBdsexex kT
t
kT
stAkT
kTtAt
+= ∫
−−
,uFxFx kT2kT1t ⋅+⋅=
( )
( )
∫−
=
−=
t
kT
stA2
kTtA1
.BdseF
eF
( ) ( ) ( ){ }( )∑ ∫
−
=
++⋅+⋅⋅+⋅+=
1N
0k
T1k
kTkT
TkTkT2kT1
TkT2kT1NT
TNT dtRuuuFxFQuFxF
2
1Sxx
2
1u,J x
( ) ∑−
=+++=
1N
0kk1
Tkk1
Tkk1
TkNT
TNT uRuuMx2xQx
2
1Sxx
2
1u,J x
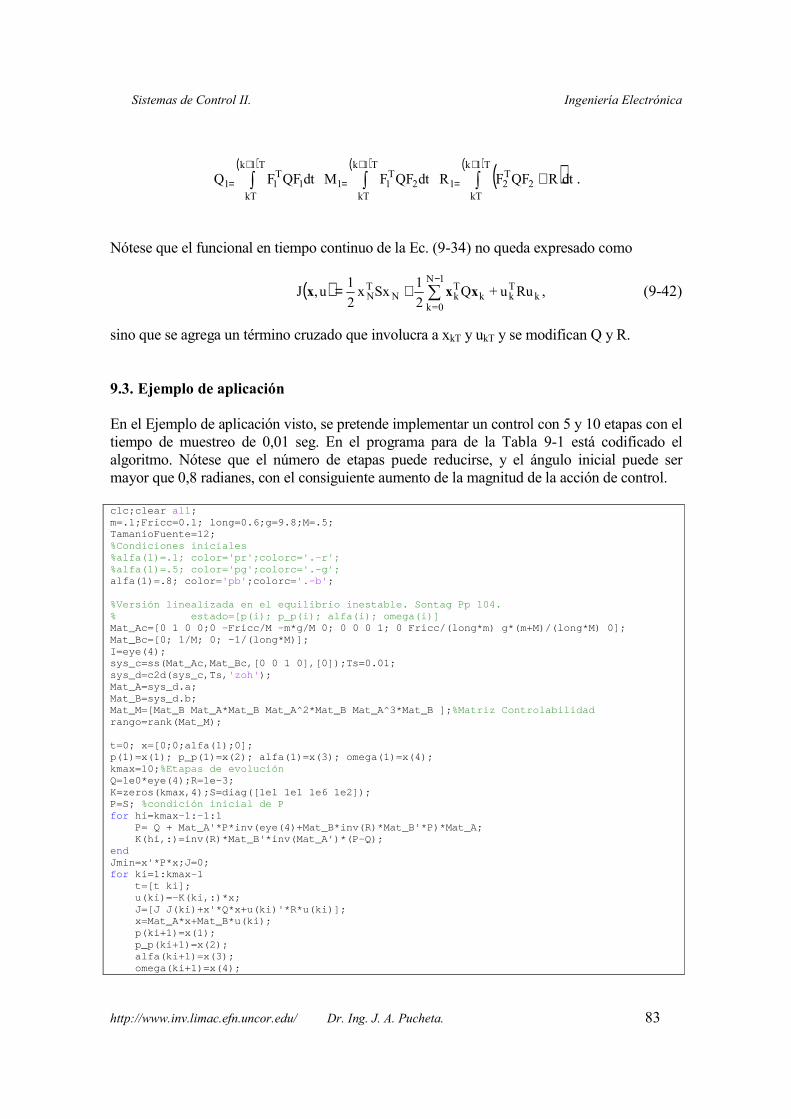
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 83
( )
tdQFFQT1k
kT1
T11 ∫
+
= ( )
tdQFFMT1k
kT2
T11 ∫
+
= ( )( )tdRQFFR
T1k
kT2
T21 ∫
+
= + .
Nótese que el funcional en tiempo continuo de la Ec. (9-34) no queda expresado como
(9-42)
sino que se agrega un término cruzado que involucra a xkT y ukT y se modifican Q y R. 9.3. Ejemplo de aplicación En el Ejemplo de aplicación visto, se pretende implementar un control con 5 y 10 etapas con el tiempo de muestreo de 0,01 seg. En el programa para de la Tabla 9-1 está codificado el algoritmo. Nótese que el número de etapas puede reducirse, y el ángulo inicial puede ser mayor que 0,8 radianes, con el consiguiente aumento de la magnitud de la acción de control. clc;clear all ; m=.1;Fricc=0.1; long=0.6;g=9.8;M=.5; TamanioFuente=12; %Condiciones iniciales %alfa(1)=.1; color='pr';colorc='.-r'; %alfa(1)=.5; color='pg';colorc='.-g'; alfa(1)=.8; color= 'pb' ;colorc= '.-b' ; %Versión linealizada en el equilibrio inestable. So ntag Pp 104. % estado=[p(i); p_p(i); alfa(i); omega(i )] Mat_Ac=[0 1 0 0;0 -Fricc/M -m*g/M 0; 0 0 0 1; 0 Fri cc/(long*m) g*(m+M)/(long*M) 0]; Mat_Bc=[0; 1/M; 0; -1/(long*M)]; I=eye(4); sys_c=ss(Mat_Ac,Mat_Bc,[0 0 1 0],[0]);Ts=0.01; sys_d=c2d(sys_c,Ts, 'zoh' ); Mat_A=sys_d.a; Mat_B=sys_d.b; Mat_M=[Mat_B Mat_A*Mat_B Mat_A^2*Mat_B Mat_A^3*Mat_ B ]; %Matriz Controlabilidad rango=rank(Mat_M); t=0; x=[0;0;alfa(1);0]; p(1)=x(1); p_p(1)=x(2); alfa(1)=x(3); omega(1)=x(4) ; kmax=10; %Etapas de evolución Q=1e0*eye(4);R=1e-3; K=zeros(kmax,4);S=diag([1e1 1e1 1e6 1e2]); P=S; %condición inicial de P for hi=kmax-1:-1:1 P= Q + Mat_A'*P*inv(eye(4)+Mat_B*inv(R)*Mat_B'* P)*Mat_A; K(hi,:)=inv(R)*Mat_B'*inv(Mat_A')*(P-Q); end Jmin=x'*P*x;J=0; for ki=1:kmax-1 t=[t ki]; u(ki)=-K(ki,:)*x; J=[J J(ki)+x'*Q*x+u(ki)'*R*u(ki)]; x=Mat_A*x+Mat_B*u(ki); p(ki+1)=x(1); p_p(ki+1)=x(2); alfa(ki+1)=x(3); omega(ki+1)=x(4);
( ) ,Ruu+Q2
1Sxx
2
1u,J k
Tkk
Tk
1N
0=kN
TN xxx ∑
−+=

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 84
end J(kmax)=J(kmax)+x'*S*x; u(kmax)=-K(kmax,:)*x;t=t*Ts; figure(1);hold on; subplot(3,2,1);plot(t,alfa,color);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,omega,color);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,color);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,color);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,color);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,color);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on;title( 'Plano de fase' , 'FontSize' ,TamanioFuente); subplot(2,2,2);plot(p,p_p,color);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on;title( 'Plano de fase' , 'FontSize' ,TamanioFuente); subplot(2,2,3);plot(t,J, 'pb' );grid on;title( 'Modelo lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo' , 'FontSize' ,TamanioFuente);hold on; plot(t,Jmin*ones(size(J)), '.b' ); %Verificación de la solución con el modelo no linea l en tiempo continuo. T=t(ki+1)+Ts; x=[0;0;alfa(1);0]; p=x(1); p_p=x(2); alfa=x(3); omega=x(4); tita_pp(1) =0;h=Ts/20; u=[];i=1;Jn=0; for ki=1:kmax u1(ki)=-K(ki,:)*x; for kii=1:20 u(i)=u1(ki); p_pp=(1/(M+m))*(u(i)-m*long*tita_pp*cos(alf a(i))+m*long*omega(i)^2*sin(alfa(i))-Fricc*p_p(i)); tita_pp=(1/long)*(g*sin(alfa(i))-p_pp*cos(a lfa(i))); p_p(i+1)=p_p(i)+h*p_pp; p(i+1)=p(i)+h*p_p(i); omega(i+1)=omega(i)+h*tita_pp; alfa(i+1)=alfa(i)+h*omega(i); x=[p(i); p_p(i); alfa(i); omega(i)]; Jn=[Jn Jn(i)+x'*Q*x+u(i)'*R*u(i)]; i=i+1; end end Jn(i)= Jn(i)+x'*S*x; u(i)=-K(ki,:)*x;t=0:h:T; figure(1);hold on; subplot(3,2,1);plot(t,alfa,colorc);grid on;title( 'Ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,2);plot(t,omega,colorc);grid on; title( 'Velocidad ángulo' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,3); plot(t,p,colorc);grid on;title( 'Posición carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,2,4);plot(t,p_p,colorc);grid on;title( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(3,1,3);plot(t,u,colorc);grid on;title( 'Acción de control' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);hold on; figure(2);hold on; subplot(2,2,1);plot(alfa,omega,colorc);grid on;xlabel( 'Ángulo' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad angular' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,2);plot(p,p_p,colorc);grid on;xlabel( 'Posición carro' , 'FontSize' ,TamanioFuente);ylabel( 'Velocidad carro' , 'FontSize' ,TamanioFuente);hold on; subplot(2,2,4);semilogy(t,Jn,colorc);grid on;title( 'Modelo no lineal' , 'FontSize' ,TamanioFuente);xlabel( 'Tiempo en Seg.' , 'FontSize' ,TamanioFuente);ylabel( 'Acumulación de costo' , 'FontSize' ,TamanioFuente);hold on;

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 85
semilogy(t,Jmin*ones(size(Jn)),colorc);
Tabla 9-1. Código de programa para el algoritmo del controlador óptimo en estado transitorio.
0 0.02 0.04 0.06 0.08 0.1-0.5
0
0.5
1Ángulo
0 0.02 0.04 0.06 0.08 0.1-15
-10
-5
0
5Velocidad ángulo
0 0.02 0.04 0.06 0.08 0.10
0.2
0.4
0.6
0.8Posición carro
0 0.02 0.04 0.06 0.08 0.10
5
10
15Velocidad carro
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07 0.08 0.09 0.1-400
-200
0
200
400Acción de control
Tiempo en Seg.
Fig. 9-1. Fig. 2. Evolución temporal de las variables de estado del péndulo invertido.

Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 86
-0.2 0 0.2 0.4 0.6 0.8-15
-10
-5
0
5
Ángulo
Vel
ocid
ad a
ngul
arPlano de fase
0 0.2 0.4 0.6 0.80
2
4
6
8
10
12
Posición carro
Vel
ocid
ad c
arro
Plano de fase
0 0.02 0.04 0.06 0.08 0.10
500
1000
1500Modelo lineal
Tiempo en Seg.
Acu
mul
ació
n de
cos
to
0 0.02 0.04 0.06 0.08 0.110
-2
100
102
104
106
Modelo no lineal
Tiempo en Seg.
Acu
mul
ació
n de
cos
to
Fig. 9-3. Fig. 4. Plano de fase del péndulo invertido y evolución de la acumulación de costo para el
modelo lineal y el no lineal usando el controlador óptimo en estado transitorio.
9.4. Bibliografía
[1] Fletcher, R. and M.J.D. Powell, A rapidly convergent descent method for minimization. Computer Journal, Vol. 6, 163-168, 1963. [2] Ogata, K.. Modern Control Engineering. 1997. Prentice Hall. Pag 789. [3] Sontag. Mathematical control theory 1998. Pag 104. http://www.math.rutgers.edu/˜sontag/. [4] Arnold, W.F., III and A.J. Laub, "Generalized Eigenproblem Algorithms and Software for Algebraic Riccati Equations," Proc. IEEE, 72 (1984), pp. 1746-1754. Sumario 1. INTRODUCCIÓN................................................................................................................................................ 2
1.1. Motivación.............................................................................................................................................. 2 1.2. Modelo en el espacio de estados............................................................................................................. 3 1.3. Correlación entre funciones de transferencia y ecuaciones en espacio de estados ................................. 6 1.4. Sumario................................................................................................................................................... 7 1.5. Bibliografía............................................................................................................................................. 8 1.6. Modelado en variables de estado de un sistema RLC............................................................................. 9
Sistemas de Control II. Ingeniería Electrónica
http://www.inv.limac.efn.uncor.edu/ Dr. Ing. J. A. Pucheta. 87
1.7. Modelación de un sistema monovariable de orden n. ........................................................................... 10 1.8. Sumario................................................................................................................................................. 15 1.9. Bibliografía........................................................................................................................................... 16
2. ANÁLISIS EN EL ESPACIO DE ESTADOS ........................................................................................................... 17 2.1. Representaciones en espacio de estados de función de transferencia de sistemas ................................ 17 2.2. Sumario................................................................................................................................................. 19 2.3. Bibliografía........................................................................................................................................... 19
3. SOLUCIÓN DE LA ECUACIÓN DE ESTADOS ...................................................................................................... 20 4. DISEÑO DE CONTROL LINEAL EN VARIABLES DE ESTADOS EN TIEMPO CONTINUO .......................................... 24
4.1. Diseño de controladores de estado lineales........................................................................................... 24 4.2. Esquema básico del controlador lineal de estado.................................................................................. 25 4.3. Controlabilidad ..................................................................................................................................... 26 4.4. Diseño mediante asignación de polos ................................................................................................... 27 4.5. Observabilidad...................................................................................................................................... 30 4.6. Dualidad de los procesos lineales ......................................................................................................... 32 4.7. Control de un sistema con observador .................................................................................................. 32 4.8. Sumario................................................................................................................................................. 37 4.9. Bibliografía........................................................................................................................................... 37
5. ESTABILIDAD EN EL SENTIDO DE LYAPUNOV................................................................................................. 38 5.1. Teorema de Lyapunov .......................................................................................................................... 39 5.2. Teorema de Krasovskii ......................................................................................................................... 39 5.3. Aplicación en sistemas lineales ............................................................................................................ 40 5.4. Regulador óptimo lineal en tiempo continuo........................................................................................ 40 5.5. Formulación del problema .................................................................................................................... 41 5.6. Problema de control óptimo cuadrático ................................................................................................ 41 5.7. Ejemplo Péndulo invertido ................................................................................................................... 45
6. ANÁLISIS EN EL ESPACIO DE ESTADOS EN TIEMPO DISCRETO ......................................................................... 47 6.1. Modelos de tiempo discreto.................................................................................................................. 47 6.2. Discretización de la solución de estados en tiempo continuo ............................................................... 48 6.3. Carácter no único del modelo de estado. .............................................................................................. 50 6.4. Solución de la ecuación de estado de tiempo discreto .......................................................................... 51 6.5. Relación entre la representación de estado y la matriz o función de transferencia............................... 51 6.6. Análisis de estabilidad .......................................................................................................................... 58 6.7. Controlabilidad ..................................................................................................................................... 59 6.8. Observabilidad...................................................................................................................................... 60
7. DISEÑO MEDIANTE ASIGNACIÓN DE POLOS EN TIEMPO DISCRETO .................................................................. 61 8. ESTABILIDAD EN TIEMPO DISCRETO............................................................................................................... 67
8.1. Aplicación del Teorema: Regulador óptimo lineal en tiempo discreto................................................. 68 8.2. Formulación del problema de estado estacionario................................................................................ 69 8.3. Ejemplo de aplicación........................................................................................................................... 72
9. REGULADOR ÓPTIMO LINEAL EN EL TRANSITORIO ......................................................................................... 77 9.1. Formulación del problema en el transitorio .......................................................................................... 77 9.2. Problema de control óptimo lineal de continuo a discreto.................................................................... 81 9.3. Ejemplo de aplicación........................................................................................................................... 83 9.4. Bibliografía........................................................................................................................................... 86


















