
sistemas de control pare 1
34
I.1. Introducción a sistemas El concepto de sistemas, es el primer paso crítico en la construcción de un modelo físico. Un sistema puede definirse a través de sus componentes e interconexiones, el modelo físico puede construirse representando de manera gráfica a los componentes que conforman el sistema y sus interacciones, una vez que se deducen del comportamiento global – observadas del sistema, ya sea el real o el deseado. La dinámica de sistemas trata del modelado matemático y el análisis de la respuesta de los sistemas dinámicos. I.2. Conceptos básicos. El concepto de sistemas implica el proceso de aislamiento conceptual de una parte del universo que sea de interés, al que llamaremos el sistema, y a las especificaciones de las interacciones entre este sistema y el resto del mundo, lo llamaremos, el entorno. Un modelo físico se construye aislando una parte del universo como el sistema de interés y luego se divide conceptualmente su comportamiento en componentes conocidos. I.2.1. Definición de sistema SISTEMA. Proceso (físico ó no) que transforma entradas (causas) en salidas (efectos). Sistema (Proceso Planta) Entrad a Sali da
-
Upload
jimmy-de-ramirez-chavez -
Category
Documents
-
view
226 -
download
0
description
introdiccion a sistemas de control
Transcript of sistemas de control pare 1

I.1. Introducción a sistemas
El concepto de sistemas, es el primer paso crítico en la construcción de un modelo físico.
Un sistema puede definirse a través de sus componentes e interconexiones, el modelo físico
puede construirse representando de manera gráfica a los componentes que conforman el sistema
y sus interacciones, una vez que se deducen del comportamiento global – observadas del sistema,
ya sea el real o el deseado.
La dinámica de sistemas trata del modelado matemático y el análisis de la respuesta de los
sistemas dinámicos.
I.2. Conceptos básicos.
El concepto de sistemas implica el proceso de aislamiento conceptual de una parte del universo
que sea de interés, al que llamaremos el sistema, y a las especificaciones de las interacciones entre
este sistema y el resto del mundo, lo llamaremos, el entorno.
Un modelo físico se construye aislando una parte del universo como el sistema de interés y luego
se divide conceptualmente su comportamiento en componentes conocidos.
I.2.1. Definición de sistema
SISTEMA. Proceso (físico ó no) que transforma entradas (causas) en salidas (efectos).
Causas Efectos
Descripción de la relación causa-efecto
Definiciones de sistema (malla abierta y cerrada, una o varias entradas y salidas) y señal.
SISO (del inglés Single Input Single Output). Una entrada, una salida.
SalidaEntrada Sistema
(Proceso
Planta)
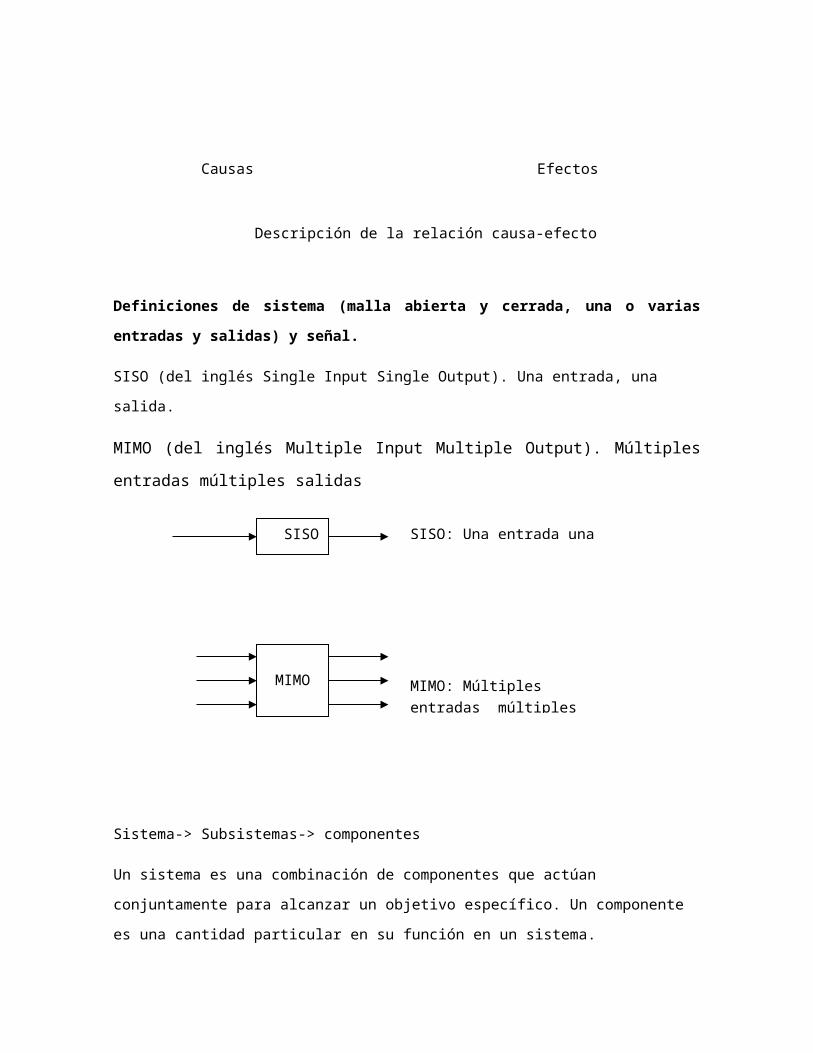
MIMO (del inglés Multiple Input Multiple Output). Múltiples entradas múltiples salidas
Sistema-> Subsistemas-> componentes
Un sistema es una combinación de componentes que actúan conjuntamente para alcanzar un
objetivo específico. Un componente es una cantidad particular en su función en un sistema.
Sistema en malla abierta ó sistemas programados.
Sistema realimentado o de malla cerrada.
SEÑAL. Es una función que representa el comportamiento de un sistema; es la salida de un
sistema cuya excitación no se conoce.
SISO
MIMO
SISO: Una entrada una salida.
MIMO: Múltiples entradas múltiples salidas
H(s)
Sistemae
_
+ YX
Sistema

x(t)
DEFINICIÓN DE FDT
Definición.
Este tipo de función esta basada en la representación de un modelo matemático que va ha relacionar la respuesta de un sistema a una señal de entrada. En general, la función de transferencia de los sistemas puede escribirse como un coeficiente de polinomio en S.
Para entender mejor esta definición, al momento de graficar la función de transferencia, generalmente, va ha mostrar un pico formado por los modelos de la señal de salida respecto de la señal de entrada, lo que permite encontrar los ceros y los polos, respectivamente. Y que representan las raíces en las que cada uno de los modelos del cociente se iguala a cero. Es decir, representa la región frontera a la que no debe llegar ya sea la respuesta del sistema o la excitación al mismo; ya que de lo contrario llegará ya sea a la región nula o se irá al infinito, respectivamente.
Por lo que decimos que la función de transferencia se puede determinar según la siguiente:
Donde H(s) es la función de transferencia también notada como G(s); Y(s) es la transformada de Laplace de la respuesta y U(s) es la transformada de Laplace de la señal de entrada.
La función de transferencia también puede considerarse como la respuesta de un sistema inicialmente inerte a un impulso como señal de entrada.
En el caso de querer hallar la respuesta como función del tiempo, se realiza a través de la transformada de Laplace inversa de Y(s).
Función de la Transferencia de un Sistema.
Se utiliza en el análisis de sistemas lineales.
Sistema

En la relación de la variable de salida con respecto a la variable de entrada.
Es una propiedad del sistema.
Relaciona las variables pero no proporciona información sobre la estructura física.
La función de transferencia de un sistema lineal e invariante en el tiempo (SLIT) se define como la
transformada de Laplace de la salida dividida entre la transformada de Laplace en la entrada con
condiciones iniciales nulas, o sea:
H (s )=Y ( s )X (s )
; C . I=0
Respuesta a una entrada en rampa
Para obtener la respuesta a una entrada en rampa de la función de transferencia del sistema G(s), divida G(s) por s y utilice la orden de respuesta a un salto.
C(s)R(s)
= 1
s2+s+1
Para una entrada en rampa unitaria se tiene que R(s)=1
s2 . Por lo tanto
C(s)=
1
s2+s+1∗1
s2 =
1(s¿¿2+s+1)s∗1
s¿
Programa en MATLAB
%--------------Respuesta a una entrada unitaria en rampa------>> %******La respuesta a una entrada unitaria en rampa se obtiene como la>> %respuesta a un salto unitario de G(s)/s*****>> %******Introduzca el numerador y el denominador de G(s)/s*****
>> num= [0 0 0 1];

>> den= [1 1 1 0];>> %*****Especifique los instantes de tiempo de cálculo (taoes como t=0:0.1:7).>> %A continuación introduzca la orden de respuesta a un salto unitario>> %c=step (num,den,t)*****
>> t= 0:0.1:7;>> c= step (num,den,t);>> %*** Al representar la respuesta a una rampa, anada a la grafica de entrada de>> %referencia. La entrada de referencia es t. Incluya como argumentos de la orden>> %plot lo siguiente: t,t,'-'. La orden plot en este caso es como sigue:>> %plot (t,c,'o',t,t,'-')*****>> plot (t,c,'o',t,t,'-')
>> %****Introduzca la rejilla, el titulo de la grafica y las etiquetas de los ejes x e y***>> grid>> title('Respuesta a una rampa unitaria del sistema G(s) = 1(s^2+s+1)')>> xlabel('t seg')>> ylabel('salida c')

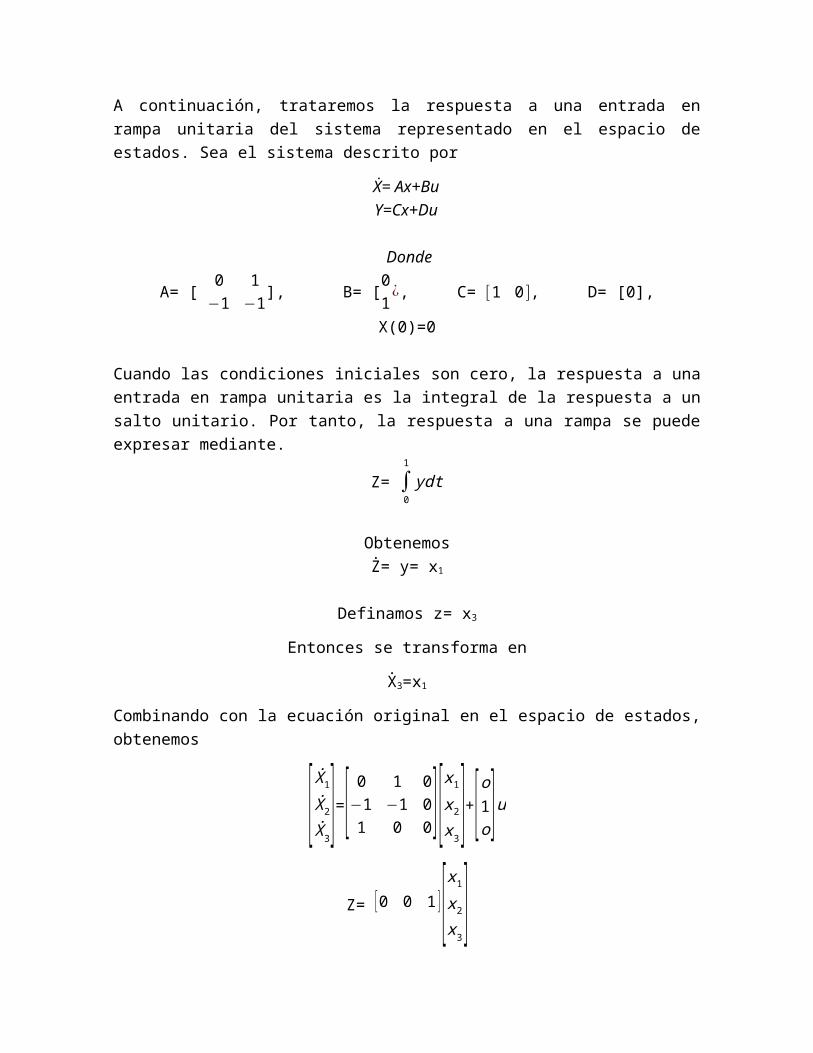
A continuación, trataremos la respuesta a una entrada en rampa unitaria del sistema representado en el espacio de estados. Sea el sistema descrito por
Ẋ= Ax+BuY=Cx+Du
Donde
A= [ 0 1
−1 −1], B= [
01¿, C= [1 0], D= [0], X(0)=0
Cuando las condiciones iniciales son cero, la respuesta a una entrada en rampa unitaria es la integral de la respuesta a un salto unitario. Por tanto, la respuesta a una rampa se puede expresar mediante.
Z= ∫0
1
ydt
ObtenemosŻ= y= x1
Definamos z= x3
Entonces se transforma en
Ẋ3=x1
Combinando con la ecuación original en el espacio de estados, obtenemos
[Ẋ1
Ẋ2
Ẋ3]=[ 0 1 0
−1 −1 01 0 0][ x1
x2
x3]+[o1o]u
Z= [ 0 0 1 ][ x1
x2
x3]
Que puede escribirse como
Ẋ= AAx+BBu
Z= CCx+DDu
Donde
AA= [ 0 1 0−1 −1 01 0 0]=[o¿ o¿C ¿0¿]
BB = [o1o]=B0CC=[ 0 0 1 ]
DD=[0]
Programa en MATLAB>> A= [0 1;-1 -1];>> B= [0; 1];>> C= [1 0];>> D= [0];
>> AA= [A zeros (2,1);c 0];>> BB= [B; 0];>> CC= [0 0 1];>> DD= [0];
>> [z,x,t]=step(AA,BB,CC,DD);
>> x3=[0 0 1]*x'; plot(t,x3,t,t,'--')
>> grid>> title('Respuesta a una rampa unitaria')>> xlabel('t seg')>> ylabel('salida')
Página 51
Programa en MATLAB 3-4


Algoritmo
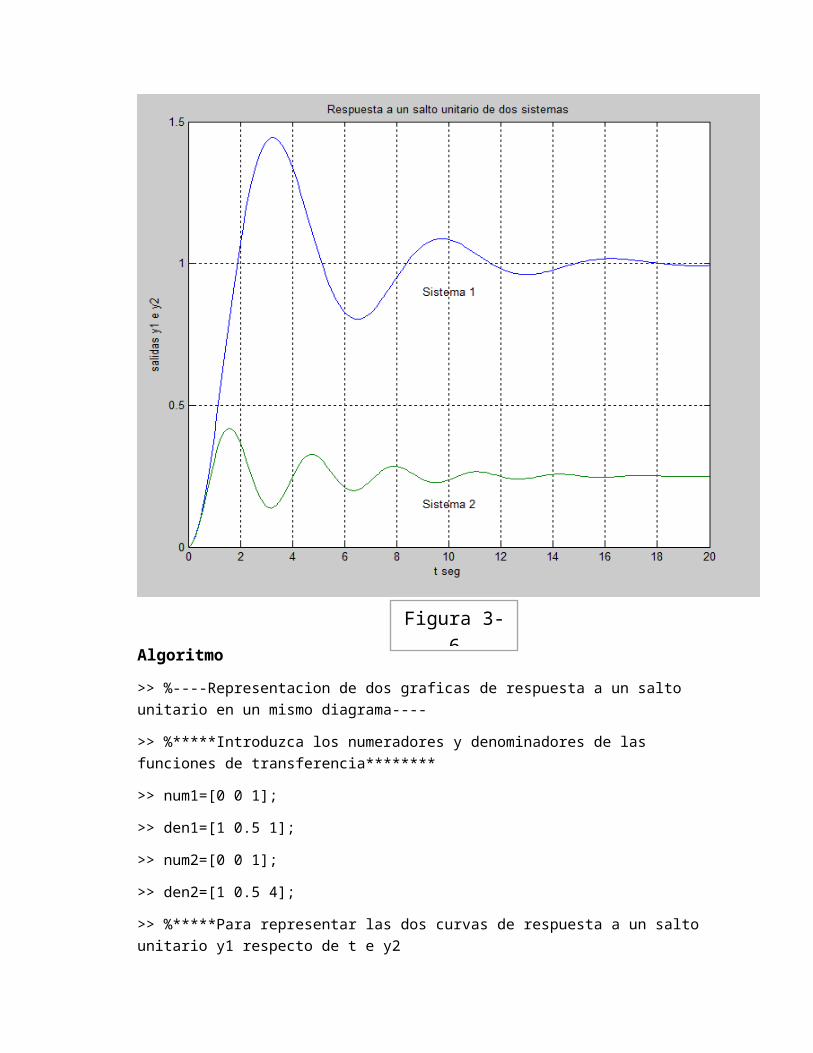
>> %----Representacion de dos graficas de respuesta a un salto unitario en un mismo diagrama----
>> %*****Introduzca los numeradores y denominadores de las funciones de transferencia********
>> num1=[0 0 1];
>> den1=[1 0.5 1];
>> num2=[0 0 1];
>> den2=[1 0.5 4];
>> %*****Para representar las dos curvas de respuesta a un salto unitario y1 respecto de t e y2
Figura 3-6

>> %respecto de t en un mismo diagrama escribiendo los textos 'Sistema1' y 'Sistema 2' para distinguir
>> %las dos graficas introduzca las siguientes ordenes********
>> t=0:0.1:20;
>> [y1,x1,t]=step(num1,den1,t);
>> [y2,x2,t]=step(num2,den2,t);
>> plot(t,y1,t,y2), grid, text(9,0.9,'Sistema 1'), text(9,0.15,'Sistema 2')
>> %*****Añadir titulo a la grafica y a los ejes x e y*****
>> title('Respuesta a un salto unitario de dos sistemas')
>> xlabel('t seg'), ylabel('salidas y1 e y2')
Utilizando estas sentencias, las curvas se marcaran con 1 y 2 respectivamente, de forma que se pueden distinguir con facilidad. Para este caso, véase el programa 3-5 en MATLAB. En la figura 3-7 se muestra la grafica resultante.
Programa en MATLAB 3-5
Algoritmo
>> %-----Representación de dos graficas de respuesta a un salto unitario en un mismo diagrama-----
>> %*****Introduzca los numeradores y denominadores de las funciones de transferencia*********
>> num1=[0 0 1];
>> den1=[1 0.5 1];
>> num2=[0 0 1];
>> den2=[1 0.5 4];
>> %***Para representar las dos curvas de respuesta a un salto unitario y1 respecto de t e y2
>> %respecto de t en un mismo diagrama con las gráficas marcadas como '1' y '2' respectivamente,
Figura 3-7
>> %introduzca las siguientes ordenes****
>> t=0:0.4:20;
>> [y1,x1,t]=step(num1,den1,t);
>> [y2,x2,t]=step(num2,den2,t);
>> plot(t,y1,'o',t,y2,'o')
>> text(t,y1,'1'),text(t,y2,'2')
>> %******Añadir rejilla, título a la gráfica y a los ejes x e y*******
>> grid
>> title('Respuesta a un salto unitario de dos sistemas')
>> xlabel('t seg')
>> ylabel('salidas y1 e y2')
Respuesta a un salto unitario (caso singular)
Para obtener la respuesta a un salto unitario, algunos casos singulares originaran división por cero en los cálculos. Considere la siguiente función de transferencia de un sistema en lazo cerrado
C (s)N (s )
= s2 s2+2 s+1
Donde N(s) es la entrada de perturbación y C(s) es la salida correspondiente. En sistemas de control el efecto de la perturbación debe hacerse tan pequeño como sea posible.
Obtengamos la respuesta c(t) a la perturbación de un salto unitario a la entrada. Como N(s)=1/s, obtemos
C (s)N (s )
= s2 s2+2 s+1
1s= 1
2 s2+2 s+1
La transformada inversa de Laplace de C(s) da
c(t)= e−0.5 t sin 0.5 t
La respuesta c(t) se amortigua a cero.
En la figura 3-8 se muestra la grafica generada por el programa 3-6.

Programa en MATLAB 3-6
Algoritmo;
>> %------Respuesta a un salto unitario-----
>> %*****Introduzca el numerador y el denominador de la funcion de transferencia*****
>> num=[0 1 0];
>> den=[2 2 1];
>> %********Introduzca la orden de respuesta a un salto*********
Figura 3-8

>> t=0:0.1:12;
>> step(num,den,t);
>> %*********Añadir rejilla y el titulo de la grafica*******
>> grid
>> title('Respuesta a un salto unitario')
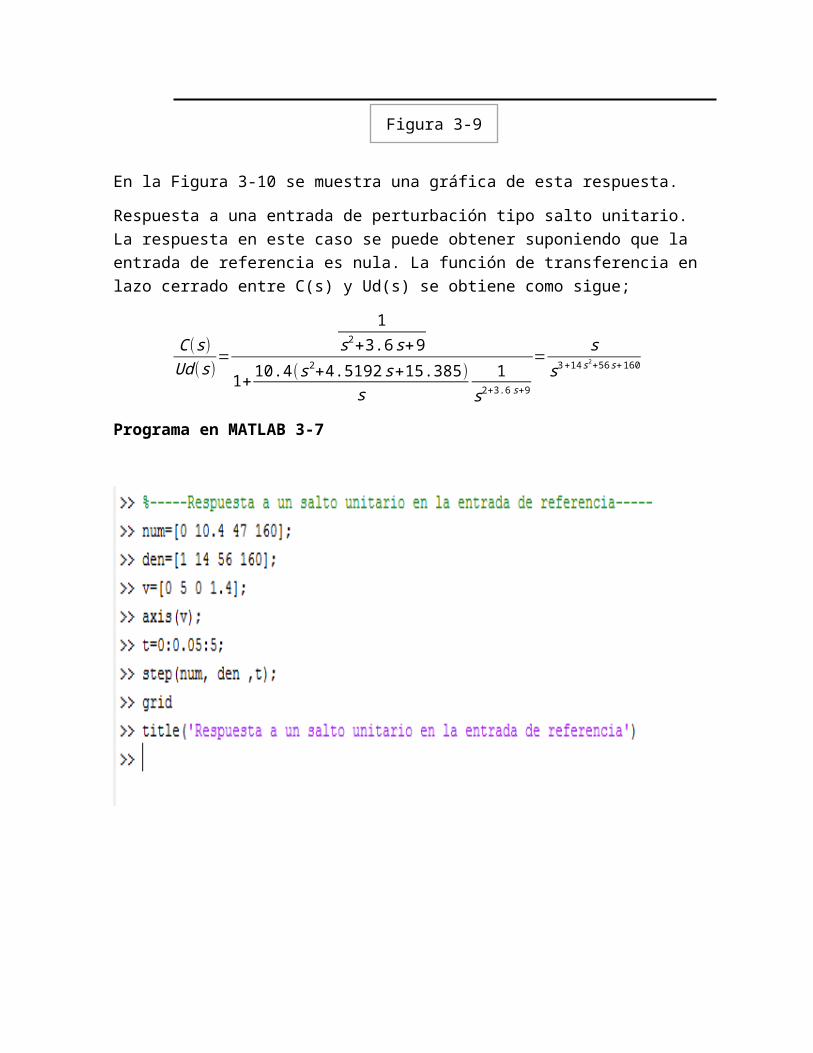
Ejemplo 3-3
Considere el sistema que se muestra en la Figura 3-9. Obtenga las respuestas del sistema a una entrada de referencia y a una entrada de perturbación tipo unitario.
Respuesta a una entrada de referencia tipo salto unitario. La función de transferencia en lazo cerrado para el sistema, suponiendo Ud(s)= 0, se obtiene como sigue:
C (s )N ( s )
=
10.4 ( s2+4.5192 s+15.385 )s
1s2+3.6 s+9
10.4 ( s2+4.5192 s+15.385 )s ( s2+3.6 s+9 )
= 10.4 s2+47 s+160
s3+14 s2+56 s+160
En la Figura 3-10 se muestra una gráfica de esta respuesta.
10.4(s2+4.5192 s+15.385)s
1s (Js+b)
G(s) Planta
Ud(s)
R(s) C(s)
Figura 3-9

Respuesta a una entrada de perturbación tipo salto unitario. La respuesta en este caso se puede obtener suponiendo que la entrada de referencia es nula. La función de transferencia en lazo cerrado entre C(s) y Ud(s) se obtiene como sigue;
C (s )Ud(s)
=
1
s2+3.6 s+9
1+10.4 (s2+4.5192 s+15.385)
s1
s2+3.6s+9
= s
s3+14 s2+56 s+160
Programa en MATLAB 3-7

Algoritmo;
>> %-----Respuesta a un salto unitario en la entrada de referencia-----
>> num=[0 10.4 47 160];
>> den=[1 14 56 160];
>> v=[0 5 0 1.4];
>> axis(v);
>> t=0:0.05:5;
>> step(num, den ,t);
>> grid
>> title('Respuesta a un salto unitario en la entrada de referencia')
El programa 3-8 se puede introducir para obtener una gráfica de la respuesta a una perturbación de entrada tipo unitario.
Figura 3-10
Programa en MATLAB 3-8
Algoritmo;
>> %-------Respuesta a un salto unitario en la entrada de perturbacion-----
num=[0 0 1 0];
den=[1 14 56 160];
v=[0 10 -0.04 0.04];
>> axis(v);
>> t=0:0.1:10;
>> step(num,den,t);
>> grid
>> title('Respuesta a un salto unitario en la entrada de perturbación')
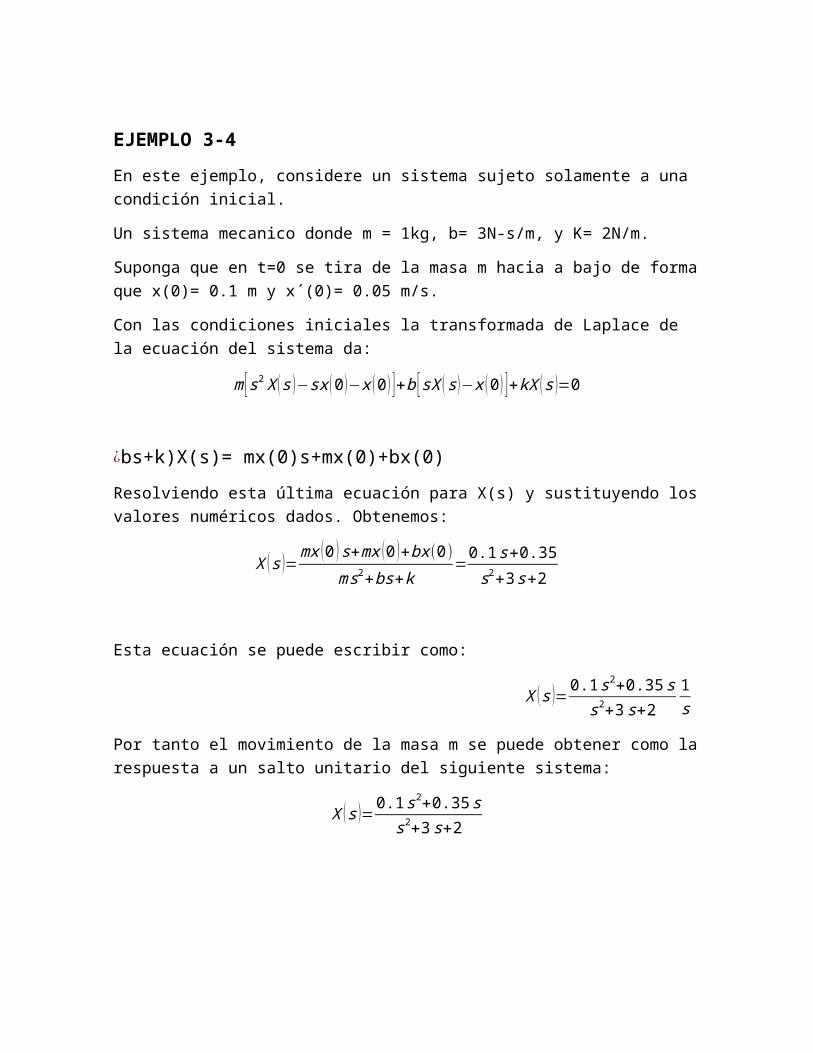
EJEMPLO 3-4
En este ejemplo, considere un sistema sujeto solamente a una condición inicial.
Un sistema mecanico donde m = 1kg, b= 3N-s/m, y K= 2N/m.
Suponga que en t=0 se tira de la masa m hacia a bajo de forma que x(0)= 0.1 m y x´(0)= 0.05 m/s.
Con las condiciones iniciales la transformada de Laplace de la ecuación del sistema da:
m [s2 X ( s )−sx (0 )−x (0 ) ]+b [sX ( s)−x (0 ) ]+kX (s )=0
¿bs+k)X(s)= mx(0)s+mx(0)+bx(0)
Resolviendo esta última ecuación para X(s) y sustituyendo los valores numéricos dados. Obtenemos:
X ( s)=mx ( 0 ) s+mx (0 )+bx (0)
ms2+bs+k=
0.1 s+0.35
s2+3 s+2
Esta ecuación se puede escribir como:
X ( s)=0.1 s2+0.35 ss2+3 s+2
1s
Por tanto el movimiento de la masa m se puede obtener como la respuesta a un salto unitario del siguiente sistema:
X ( s)=0.1 s2+0.35 ss2+3 s+2

Programa en MATLAB 3-9
Figura 3-13

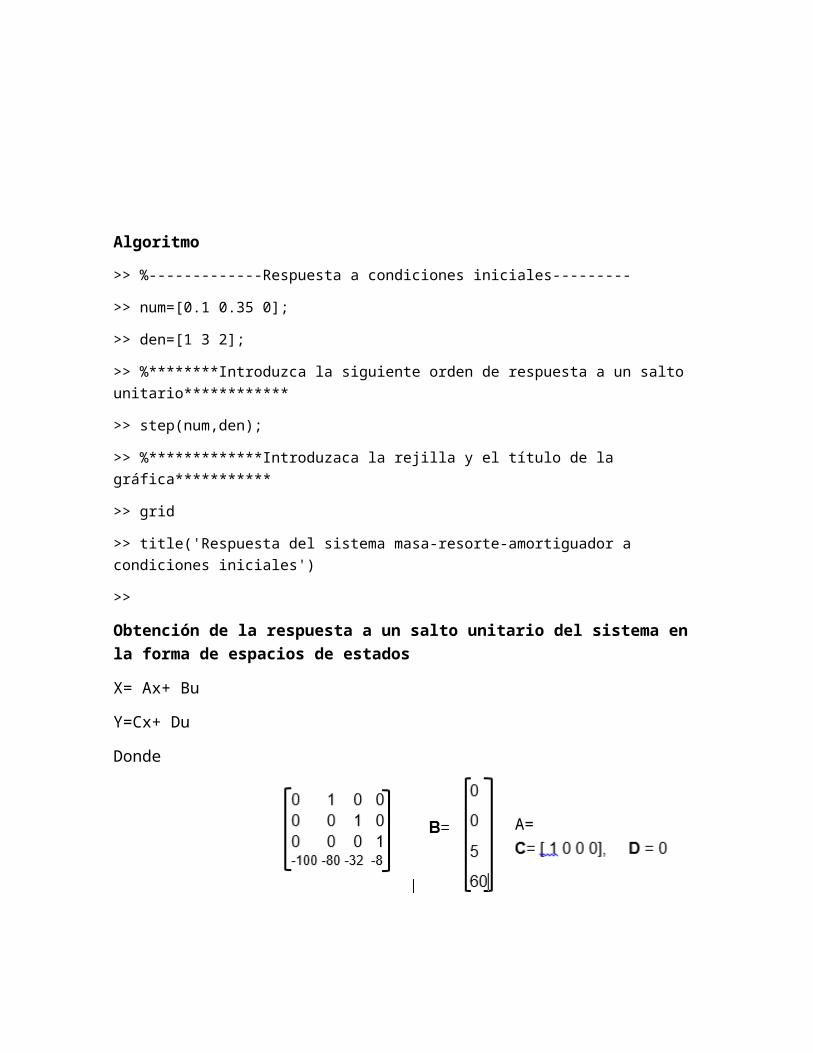
Algoritmo
>> %-------------Respuesta a condiciones iniciales---------
>> num=[0.1 0.35 0];
>> den=[1 3 2];
>> %********Introduzca la siguiente orden de respuesta a un salto unitario************
>> step(num,den);
>> %*************Introduzaca la rejilla y el título de la gráfica***********
>> grid
>> title('Respuesta del sistema masa-resorte-amortiguador a condiciones iniciales')
>>
Obtención de la respuesta a un salto unitario del sistema en la forma de espacios de estados
X= Ax+ Bu
Y=Cx+ Du
Donde
A=
El programa para introducir en MATLAB generara una gráfica de la curva de respuesta a un salto unitario.

Programa en MATLAB 3-10
Algoritmo
>> %--------Respuesta a un salto unitario-----------
>> %****Introduzca las matrices A,B,C y D de las ecuaciones en el
>> %espacio de estados******
>> A=[0 1 0 0;0 0 1 0;0 0 0 1;-100 -80 -32 -8];
>> B=[0;0;5;60];
>> C=[1 0 0 0];
>> D=[0];
>> %****Para obtener la respuesta a un salto unitario de y respecto a t,
>> %introduzca la siguiente orden****
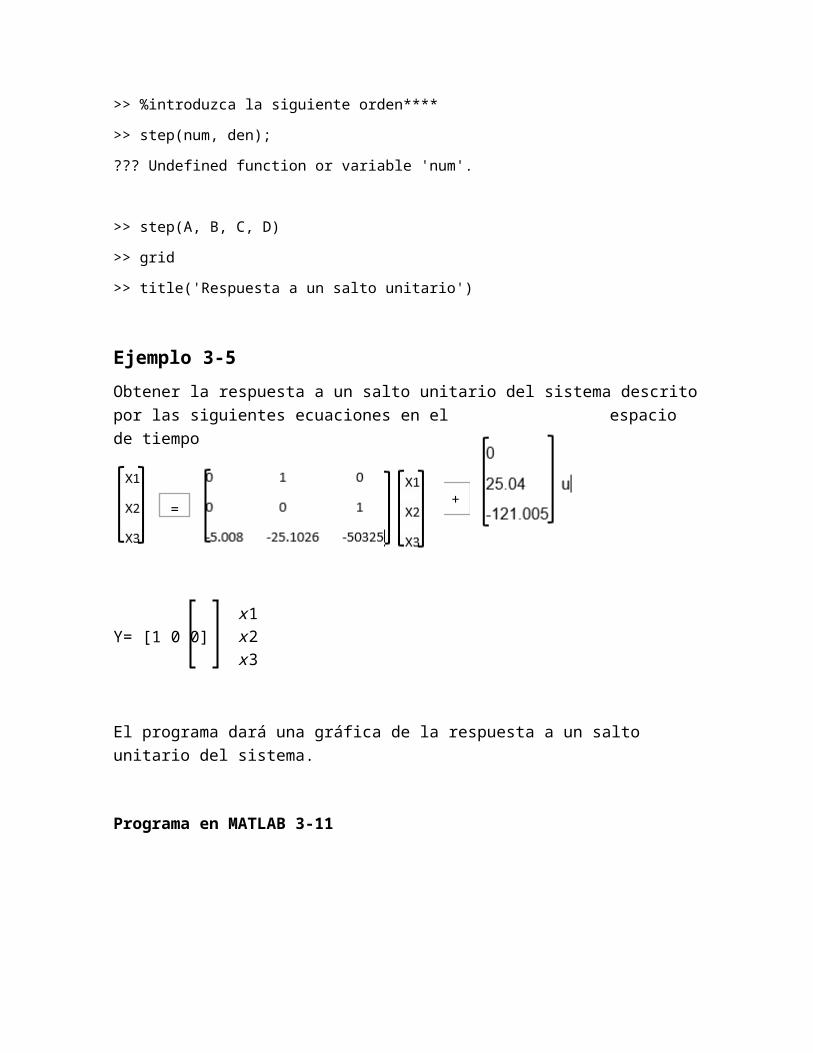
>> step(num, den);
??? Undefined function or variable 'num'.
>> step(A, B, C, D)
>> grid
>> title('Respuesta a un salto unitario')
Ejemplo 3-5
Obtener la respuesta a un salto unitario del sistema descrito por las siguientes ecuaciones en el espacio de tiempo
Figura 3-14
= +

Y= [1 0 0] x 1x 2x3
El programa dará una gráfica de la respuesta a un salto unitario del sistema.
Programa en MATLAB 3-11
Algoritmo
>> %-----Respuesta a un salto unitario--------
%***Introduzca las matrices A,B,C y D de las ecuaciones en el espacio de estados****
A=[0 1 0 ;0 0 1 ;-5.008 -25.1026 -5.0325];
B=[0;25.04;-121.005];
>> C=[1 0 0];
>> D=[0];
>> %------Introduzca la siguiente orden de respuesta a un salto unitario-----
>> [y,x,t]=step(A,B,C,D);
>> plot(t,y),grid
Figura 3-15

>> title('Respuesta a un salto unitario'),xlabel('t seg'),ylabel('Salida y')
Programa en MATLAB 3-12

Algoritmo
>> %-----Respuesta a un salto unitario--------
%***Introduzca las matrices A,B,C y D de las ecuaciones en el espacio de estados****
A=[0 1 0 ;0 0 1 ;-5.008 -25.1026 -5.0325];
B=[0;25.04;-121.005];
C=[1 0 0];
D=[0];
%------Introduzca la siguiente orden de respuesta a un salto unitario-----
[y,x,t]=step(A,B,C,D);
>> plot(t,y),grid
title('Respuesta a un salto unitario'),xlabel('t seg'),ylabel('Salida y')
>> plot(t,x)
>> text(5,2.5,'x1')
>> text(5,-1.5,'x2')
>> text(5,-24.0,'x3')
>> %---Añada una rejilla, titulo y etiquetas para los ejes x e y****
>> grid
>> title('Curvas de respuesta a un salto unitario para x1, x2 y x3')
>> xlabel('t seg')
>> ylabel('x1, x2 y x3')
>> pause
>> %----A continuacion, representamos cada curva separadamente-----
>> %*****Como x1=y, la curva x1 respecto de t es la misma que la curva
>> %obtenidamente previamente de y respecto de t****
>> %****Para representar x2 respecto de t, introduzca las siguientes ordenes****
>> x2=[0 1 0]*x';plot(t,x2)
>> grid
>> title('Respuesta de x2 respecto de t')
>> xlabel('t seg')
>> ylabel('x2')
>> pause
>> %----Para representar x3 respecto de t, introduzca las siguientes ordenes-----
>> x3=[0 0 1]*x';plot(t,x3)
>> grid
>> title('Respuesta de x3 respecto de t')
>> xlabel('t seg')
>> ylabel('x3')










