Sistemas de Referencia

of 4
-
Upload
sergio-alejandro-seguil -
Category
Documents
-
view
11 -
download
0
Transcript of Sistemas de Referencia
Sistemas de referenciaEl movimiento de una partcula puede ser observado desde distintossistemas de referencia. Un sistema de referencia est constituido por un origen y tres ejes perpendiculares entre s y que pasan por aqul. Los sistemas de referecia pueden estar en reposo o en movimiento. Existen dos tipos de sistemas de referencia:
Sistema de referencia inercial:es aqul que est en reposo o se mueve con velocidad constante (es decir,no tiene aceleracin). Sistema de referencia no inercial:es aqul quetiene aceleracin.
Sistemas de referencia. El observadorOest en reposo.O1yO2son inerciales, yO3es no inercial.
Los vectores posicin, velocidad y aceleracin de una partcula tendrn en general distinto valor dependiendo del sistema de referencia desde el que estn calculados.
Es interesante disponer de ecuaciones que relacionen los valores de dichos vectores calculados desde distintos sistemas de referencia, porque de este modo, una vez calculados con respecto a uno de ellos y conociendo el movimiento relativo de ambos sistemas de referencia, podremos obtener los vectores medidos por el segundo.
En esta seccin vamos a obtener dichas ecuaciones para varias situaciones concretas: cuando los dos sistemas de referencia se encuentran en movimiento relativo de traslacin (uniforme y uniformemente acelerado) y cuando se encuentran en movimiento relativo de rotacin uniforme.
Movimiento relativo de traslacin uniformeLastransformaciones de Galileoson las ecuaciones que relacionan los vectores de posicin, velocidad y aceleracin medidos desde dos sistemas de referencia diferentes, cuando uno de ellos est en reposo y el otro se mueve con velocidad constante con respecto al primero. Es importante resaltar que en esta situacinambos sistemas de referencia son inerciales.
Movimiento relativo de traslacin uniforme.OyO'son dos sistemas de referencia inerciales, yO'se mueve con velocidadVconstante con respecto a O.
En la figura anterior est representada la trayectoria de una partcula (en azul) y los dos sistemas de referencia junto con los vectores unitarios que definen los sentidos positivos de sus ejes. Como puede observarse,Vector de posicin
Derivando,Vector velocidad
DondeVes la velocidad deO'con respecto aO.Derivando de nuevo,Vector aceleracin
Como se observa de la ltima ecuacin,todos los sistemas de referencia inerciales miden la misma aceleracin.
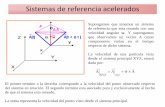
Movimiento relativo de traslacin uniformemente aceleradoConsideremos ahora una situacin semejante a la anterior, pero en la que el sistema que se traslada lo hace con una aceleracin constanteAcon respecto al que permanece en reposo.Segn las relaciones del movimientouniformemente aceleradola distancia recorrida porOen un tiempotes ahora:
De forma anloga al caso anterior obtenemos las siguientes relaciones:Vector de posicin
DondeAes la aceleracin deO'con respecto aO.Derivando,Vector velocidad
Derivando de nuevo,Vector aceleracin
Es decir, las aceleraciones mediadas por ambos sistemas no coinciden.
Un sistema que se encuentra en movimiento relativo acelerado con respecto a otro es unsistema de referencia no inercial.
Un sistema de referencia no inercial se denomina as porque en l no se cumple laley de inerciao Primera Ley de Newton.