Taller Arduino espacio-RES 2ª Sesion
40
José Pujol Pérez
-
Upload
jose-pujol-perez -
Category
Education
-
view
4.486 -
download
1
Transcript of Taller Arduino espacio-RES 2ª Sesion

José Pujol Pérez

SUMARIO 2ª SESIÓN
• SENSORES
• MOTORES
• COMUNICACIÓN SERIE
• LUZ LDR ✔
• POSICIÓN POTENCIÓMETRO ✔
• TEMPERATURA LM35
• TEMPERATURA NTC
• HUMEDAD Y TEMPERATURA DHT11
• VIBRACIÓN PIEZOELÉCTRICO
• MAGNÉTICO HALL
• ACELERÓMETROs
• DISTANCIA INFRARROJOS
• DISTANCIA ULTRASONIDOS
SENSORES

TEMPERATURA LM35
Sensor de temperatura calibrado
• Tensión de salida proporcional a la temperatura
• Cada grado centígrado equivale a 10mv "

TEMPERATURA NTC
Resistencia variable con la temperatura
Se conecta mediante el divisor de tensión "
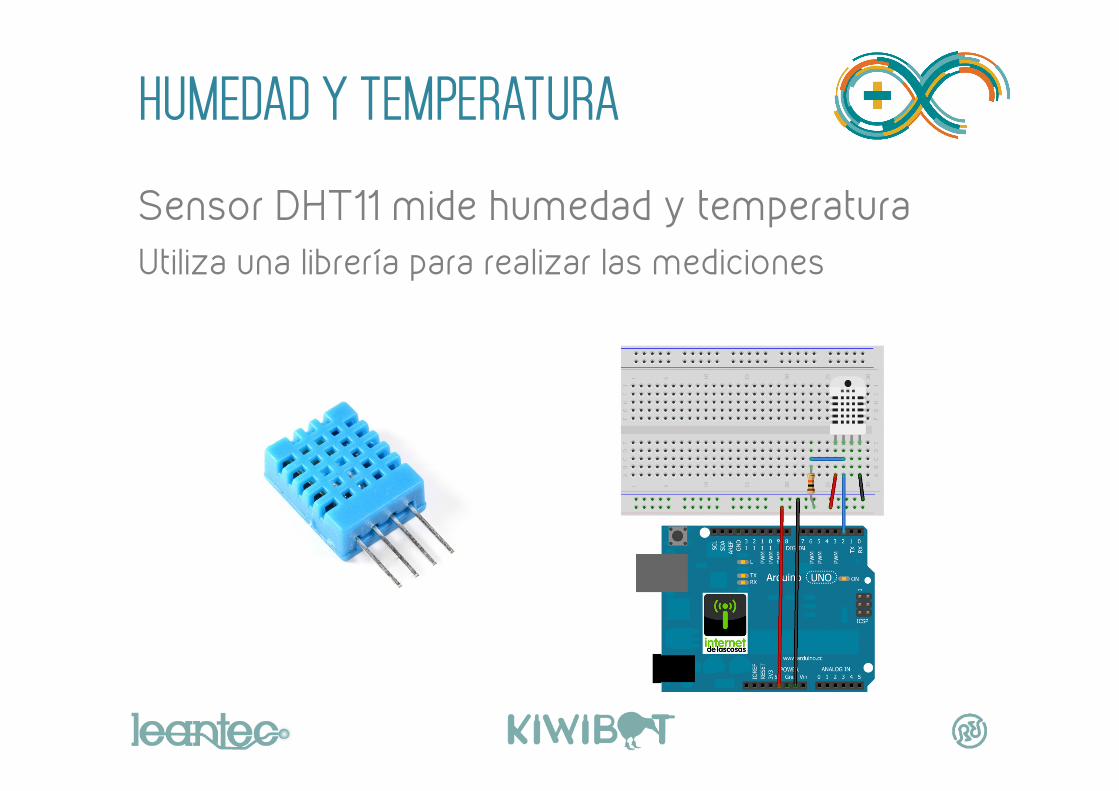
HUMEDAD Y TEMPERATURA
Sensor DHT11 mide humedad y temperatura Utiliza una librería para realizar las mediciones
"

VIBRACIÓN PIEZOELÉCTRICO
Produce una tensión entre sus extremos proporcional a la vibración "

MAGNÉTICO HALL
Detecta y mide campo magnético Al detectar polo positivo iman proporciona 1 lógico en la salida, cambia a 0 con polo negativo o al desconectar alimentación
"
A3144

ACELERÓMETRO
Es un sistema microelectromecánico. Mide aceleración en los ejes x, y, z "
X: eje x Y: eje y Z: eje z
SL: Sleep si esta a cero 0G: detecta caida
5v 3.3v GND GS: 1.5g/6g mode Self Test

ACELERÓMETRO
"

DISTANCIA INFRARROJOS
Producen una tensión en pin de salida en función de la distancia
Características: • Fáciles de usar
• Dependen de la luz ambiental
• No son lineales
• Rango reducido
• Son caros
"

DISTANCIA ULTRASONIDOS
Manda un tren de pulsos de alta frecuencia y recibe el rebote permitiendo calcular el tiempo
Características: • Rango de distancias 2-400cm, precisión 3mm
• Ángulo 15º
"
Trigger: pin digital salidaEcho: pin digital entrada

DISTANCIA ULTRASONIDOS
Funcionamiento: • Se envía un pulso digital alto (10µs) • El HCSR04 lanza ocho ondas de 40kHz • Se establece en alto la señal eco hasta que recibe el
rebote de las ondas • Se calcula el tiempo transcurrido
"
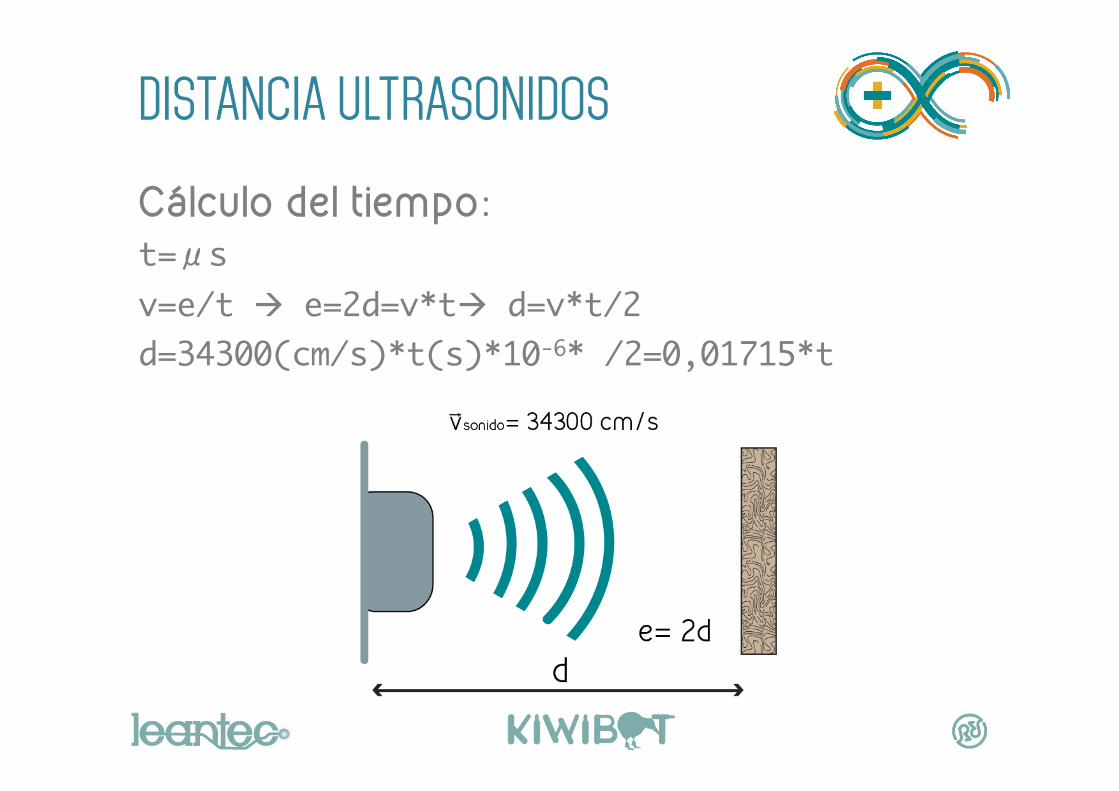
DISTANCIA ULTRASONIDOS
Cálculo del tiempo: t=μsv=e/t à e=2d=v*tà d=v*t/2d=34300(cm/s)*t(s)*10-6* /2=0,01715*t "
DISTANCIA ULTRASONIDOS
- pulseIn (pin, value)pin: el pin donde quieres leer el pulsovalue: HIGH or LOW
Lee un pulso en un pin. Si el valor es HIGH, espera a que el valor sea alto, y espera a que el pulso sea bajo Devuelve el tiempo en microsegundosSi supera el tiempo de espera devuelve 0
Tiempo de espera 1s por defecto- pulseIn (pin, value, timeout)timeout: tiempo de espera en microsegundos"

DISTANCIA ULTRASONIDOS

DISTANCIA ULTRASONIDOS

PRÁCTICA 5
Utiliza algunos de los sensores que hemos visto para realizar alguna aplicación "

• MOTORES CC
• SERVOMOTORES POSICIÓN
• SERVOMOTORES CONTINUA
MOTORES
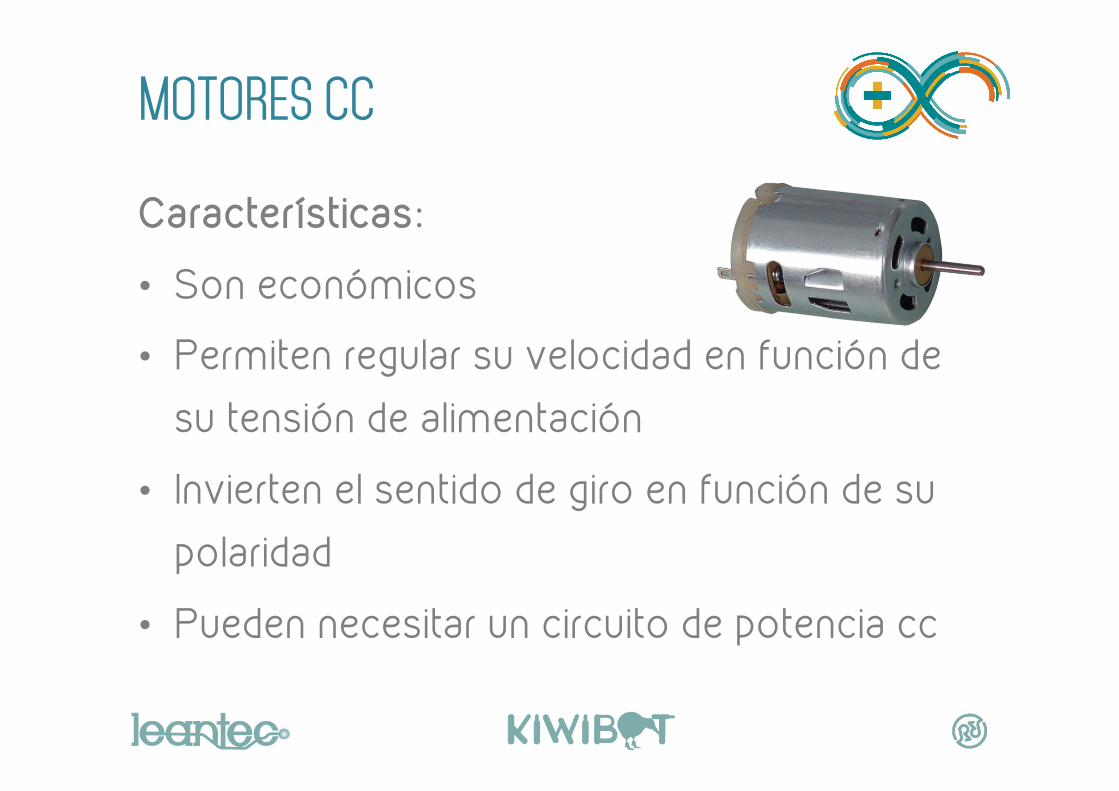
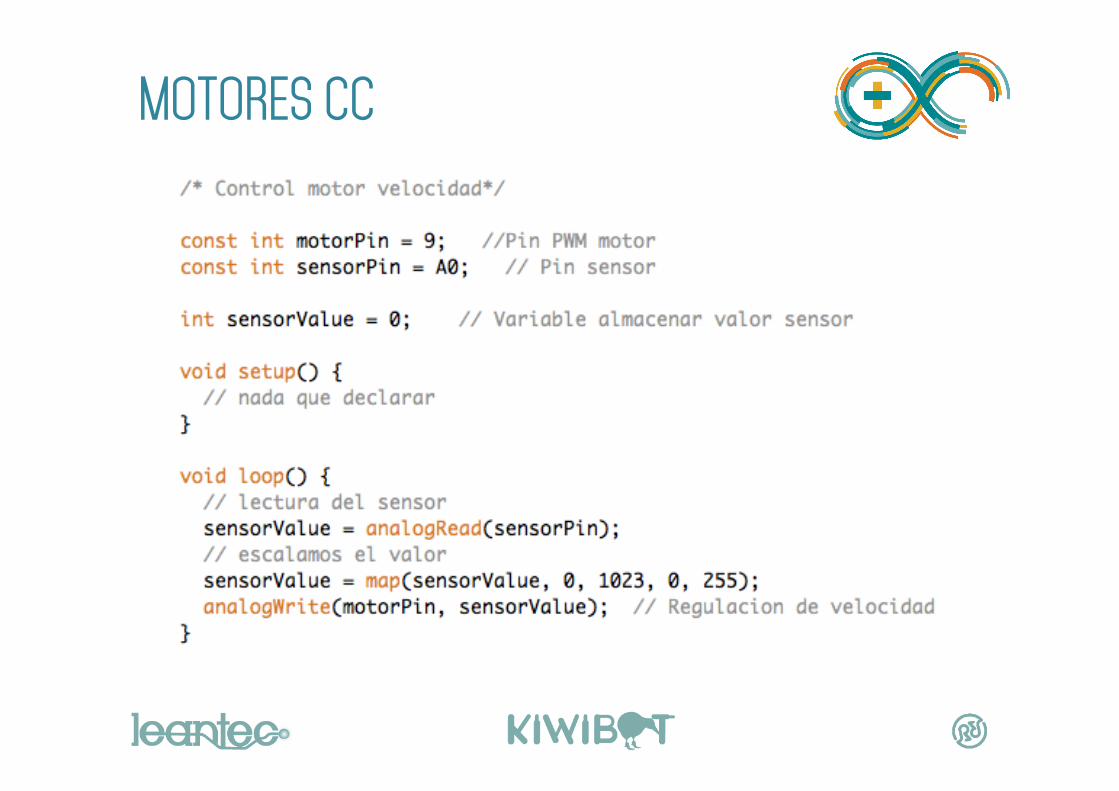
MOTORES CC
Características:
• Son económicos
• Permiten regular su velocidad en función de
su tensión de alimentación
• Invierten el sentido de giro en función de su
polaridad
• Pueden necesitar un circuito de potencia cc "
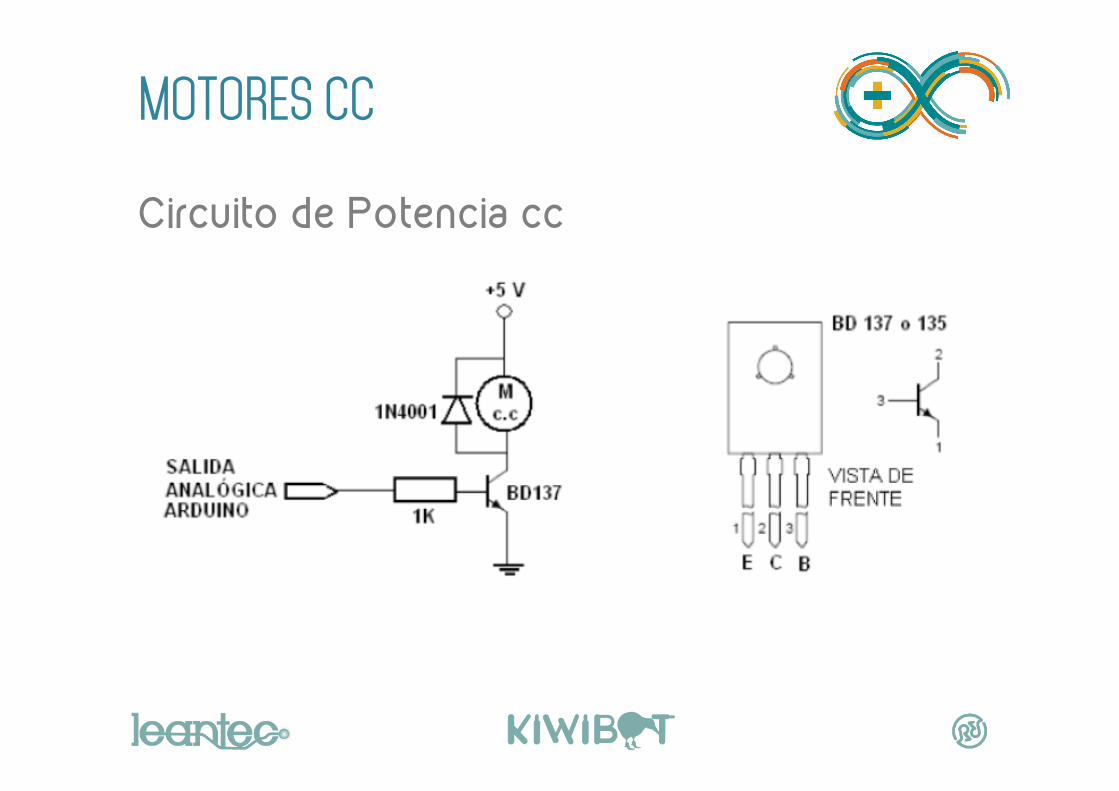
MOTORES CC
Circuito de Potencia cc "
MOTORES CC
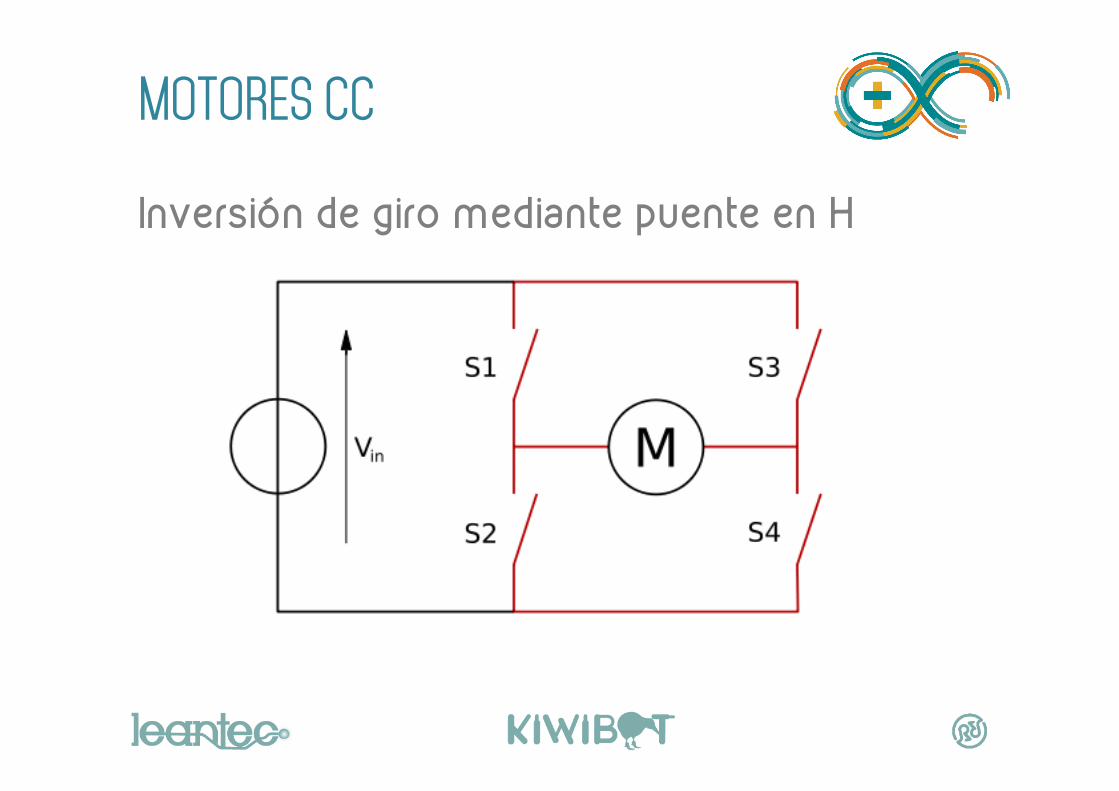
MOTORES CC
Inversión de giro mediante puente en H "
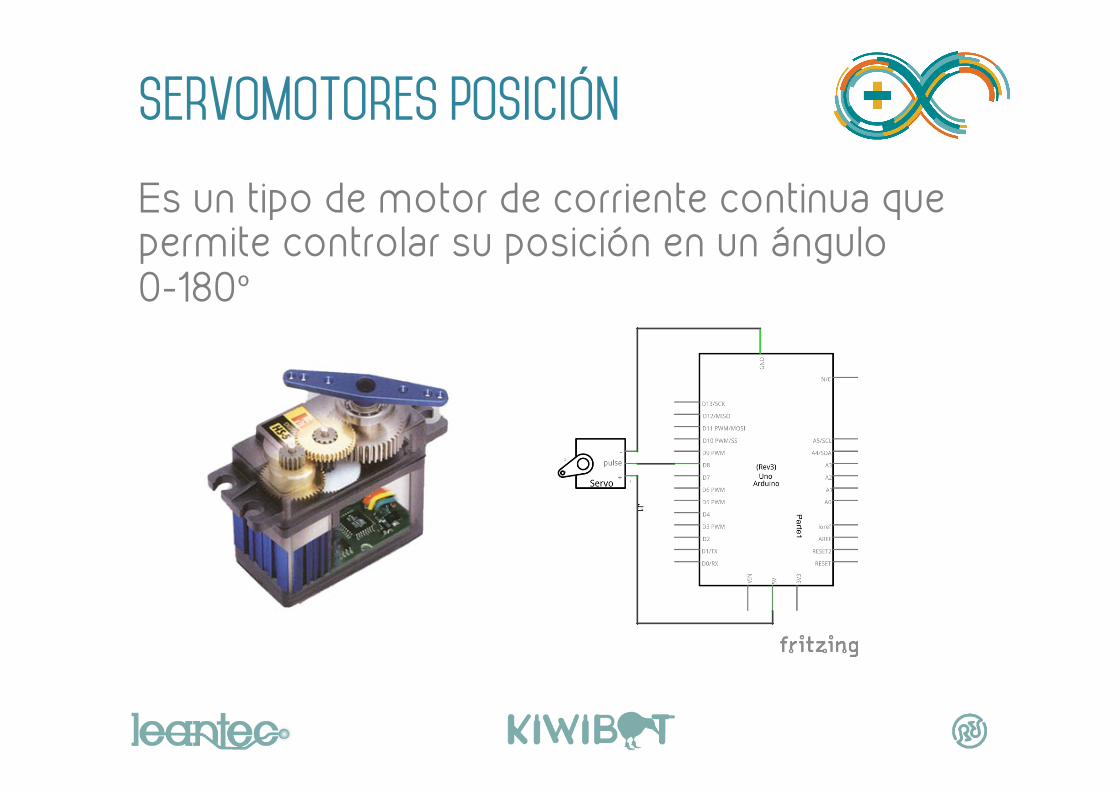
servomotores posición
Es un tipo de motor de corriente continua que permite controlar su posición en un ángulo 0-180º "
servomotores posición
"
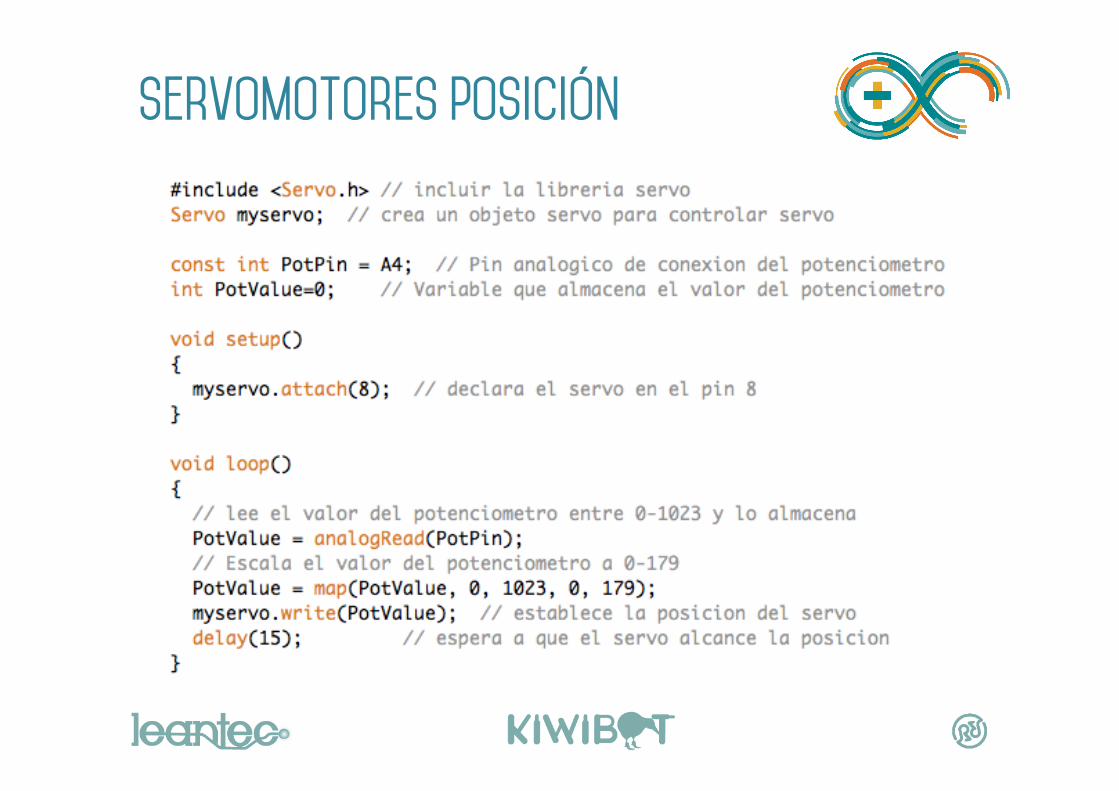
servomotores posición
"
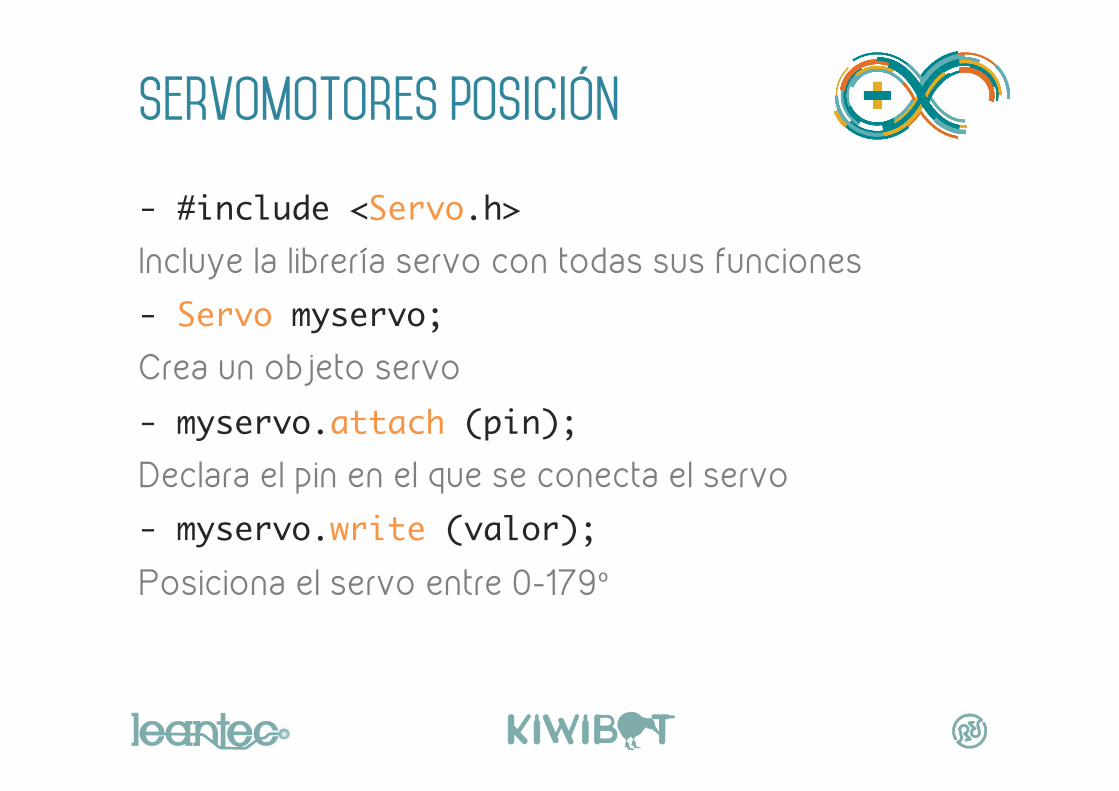
- #include <Servo.h>Incluye la librería servo con todas sus funciones
- Servo myservo;Crea un objeto servo
- myservo.attach (pin);Declara el pin en el que se conecta el servo
- myservo.write (valor);Posiciona el servo entre 0-179º

servomotores CONTINUOS
Es una modificación de los servos de posición para que puedan girar continuamente
Características:
• Velocidad reducida
• Permiten cambiar sentido de giro
"
servomotores CONTINUOS
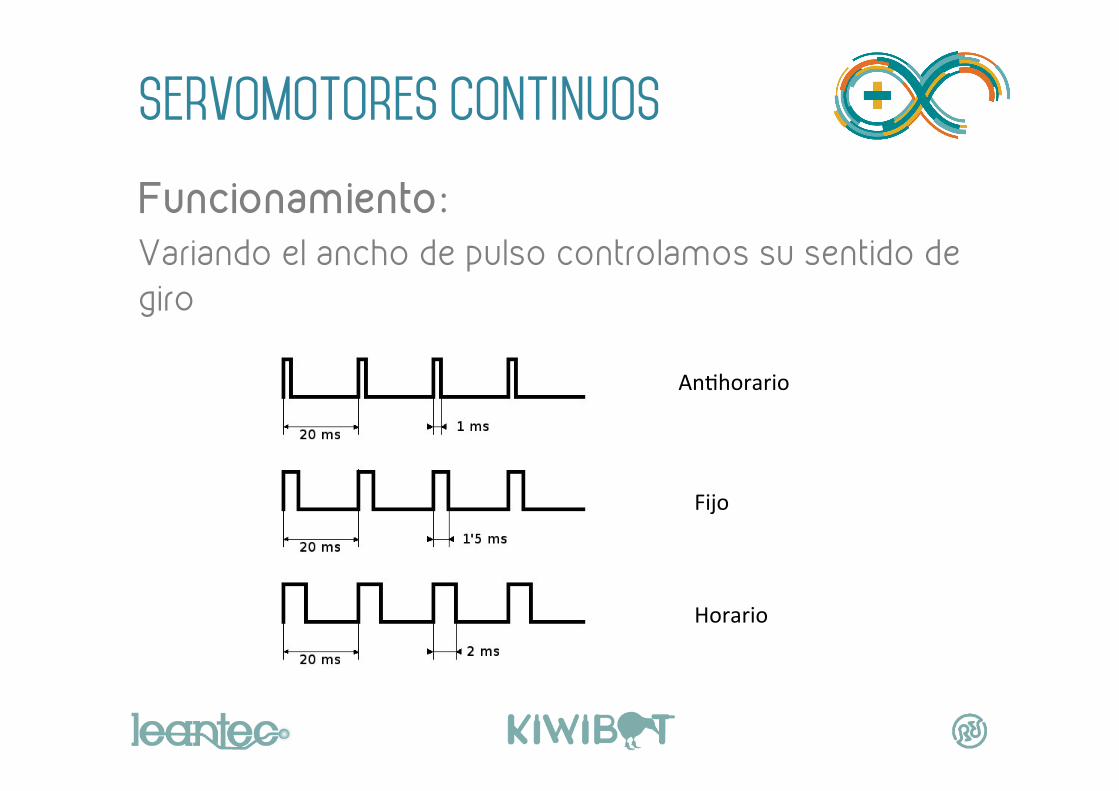
Funcionamiento: Variando el ancho de pulso controlamos su sentido de giro
"
AnIhorario
Fijo
Horario
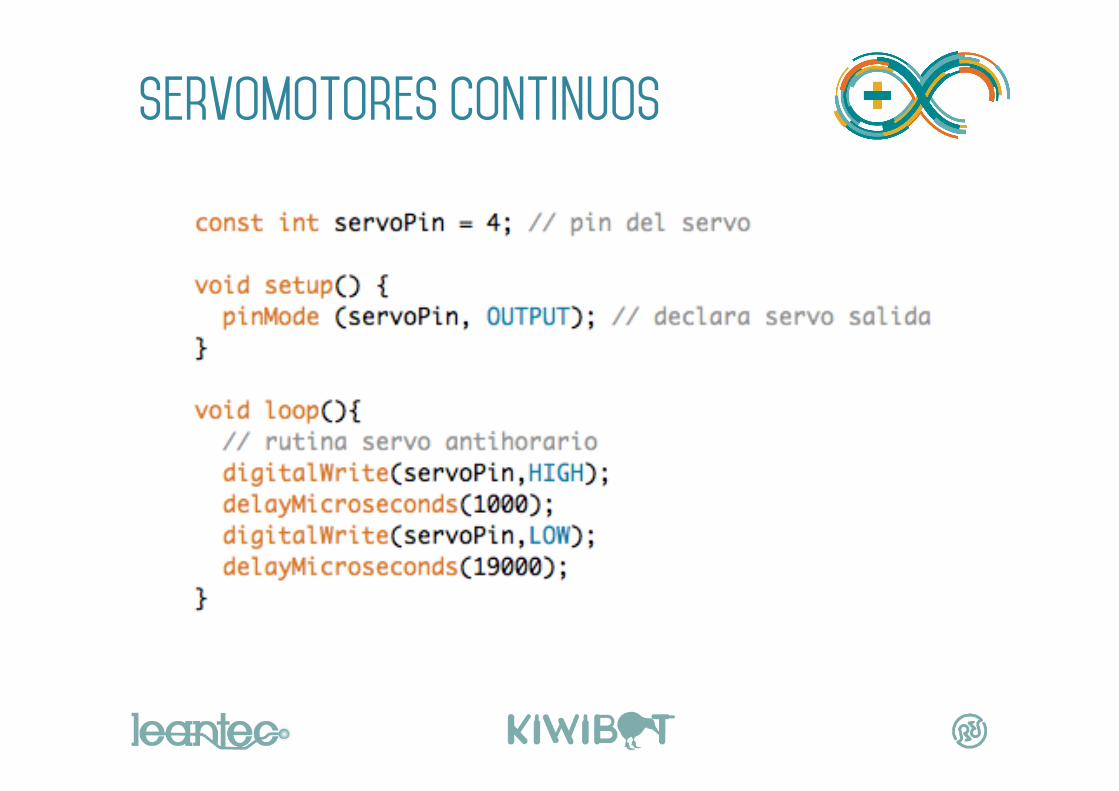
servomotores CONTINUOS
PRÁCTICA 6
- Controla uno de los tipos de motores que hemos visto
- Añade sensores para controlarlo en función de estos "
• ¿ QUÉ ES?
• CÓDIGO ASCII
• FUNCIÓN SERIAL
• COMUNICACIÓN ARDUINO PC
COMUNICACIÓN SERIE

COMUNICACIÓN SERIE
"
• Comunica Arduino con PC u otros dispositivos
• Utiliza los pines Rx 0 y Tx 1 conectados al
controlador FTDI
• Permite recibir y enviar datos
• Usa un buffer de 64 bytes
• Usa el código ASCII
COMUNICACIÓN SERIE
Utilidades:
• Monitorizar valores de variables
• Depurar programas
• Mandar comandos a Arduino desde PC
• Conexión con módulo Bluetooth, módulo wifi
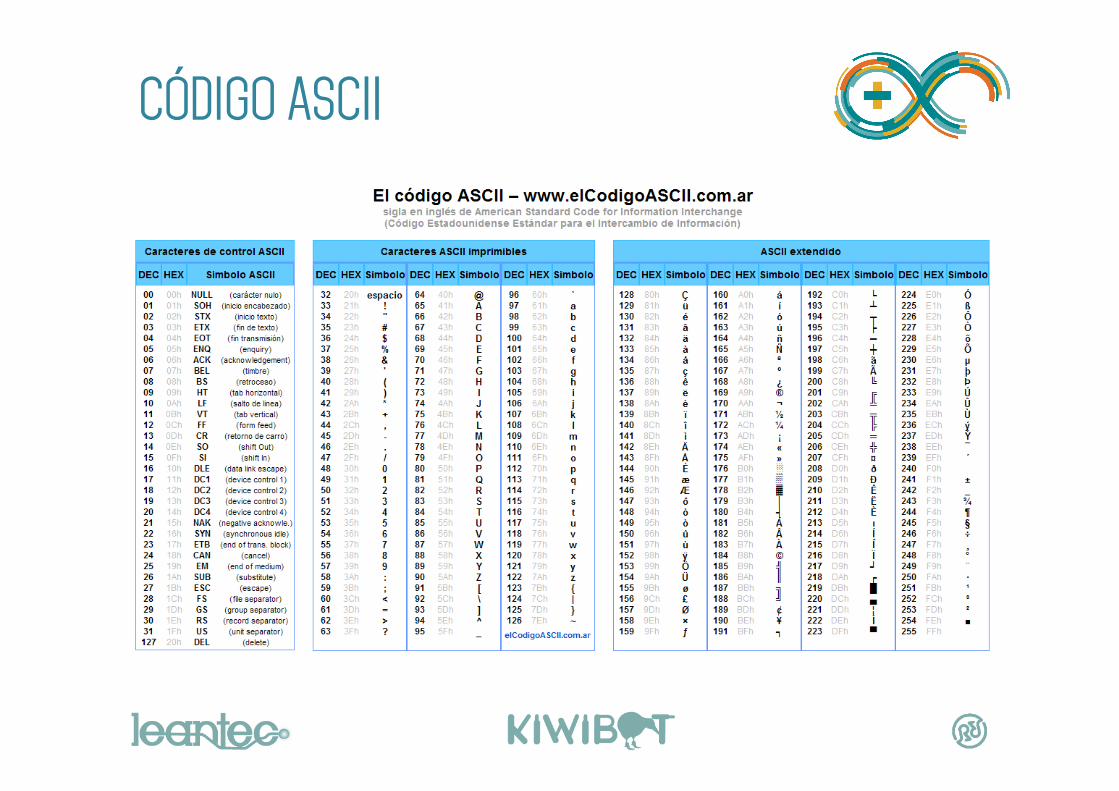
CÓDIGO ASCII "
FUNCIÓN SERIAL
- Serial.avalaible ();Devuelve el número de bytes almacenados en el buffer
de entrada. 0 si no hay datos
- Serial.read ();Lee el primer byte disponible en el buffer de entrada
Devuelve -1 si no hay datos
Lee el byte en formato decimal del código ASCII
Es decir si enviamos H, recibe el nº 72
"

EJ. COMUNICACIÓN PCà ARDUINO
"
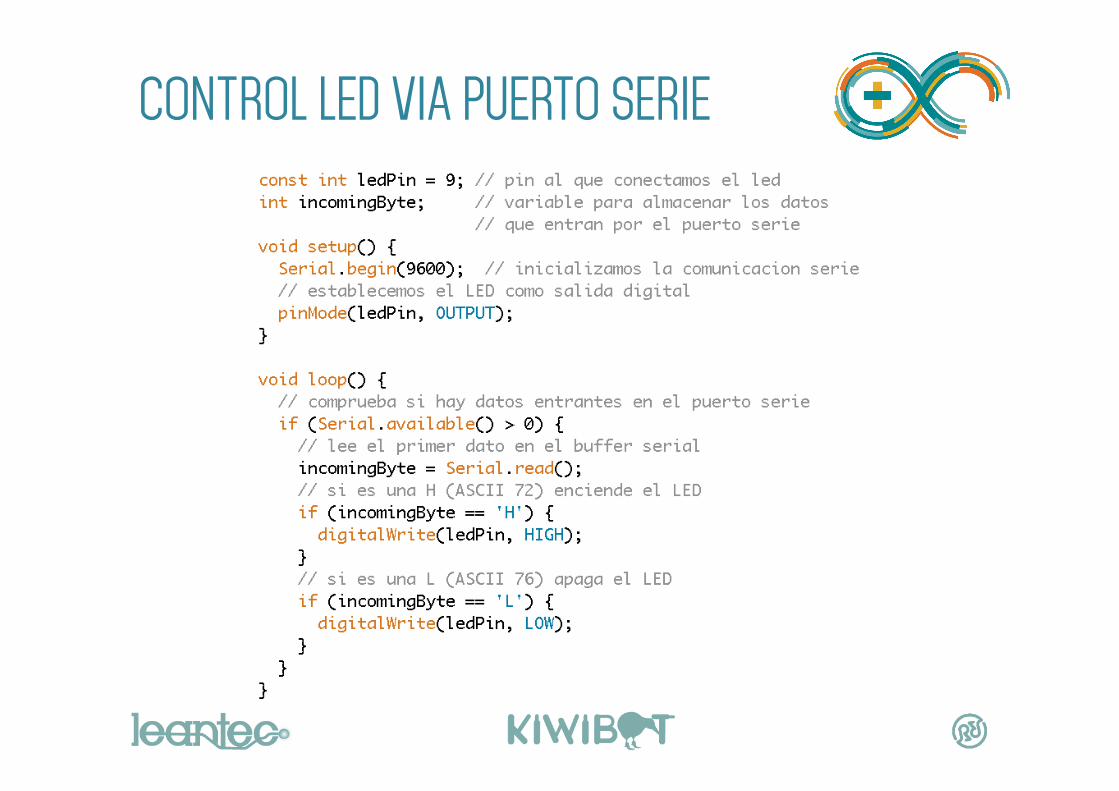
CONTROL LED VIA PUERTO SERIE
"

RECEPCIÓN DATOS NUMÉRICOS
"

PRÁCTICA 7
- Controla el encendido de un LED desde el teclado usando el programa:
Ejemplosà Communicationà PhysicalPixel
- Realiza una aplicación que implique comunicación "

Esta guía se distribuye bajo licencia Reconocimiento-‐ ComparIrIgual CreaIve commons 4.0
(cc) 2015 José Pujol Pérez Some rights reserved. This work licensed under CreaIve Commons A]ribuIon-‐ShareAlike License. To view a copy of full license, see
h]p://creaIvecommons.org/licenses/by-‐sa/3.0/ or write to CreaIve Commons, 559 Nathan Abbo] Way, Stanford, California 94305, USA.
Some of the figures have been taken from the Internet Source, and author and licence if known, is specified.
For those images, fair use applies.
licencia LICENCIA